
交通信号制御システム
【課題】 ジレンマ車両を検出して、交差点内においてジレンマ車両を円滑にかつ優先的に走行させることのできる交通信号制御システムを提供する。
【解決手段】 交差点に設置された各信号灯器の動作を1ステップごとに切り換えるためのステップ信号を発生する制御部19と、制御部19により発生されたステップ信号に基づいて複数のステップカウンタ27,28によりステップを計数して信号灯器の複数方向の動作を切り換える信号制御回路20と、を備えた信号制御装置18を複数の交差点に設置するとともに、交差点の上流側に交差点に向かう緊急車両を認識するジレンマ車両検出器17を設置し、信号制御回路18は、ジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青の延長制御または短縮制御する。
【解決手段】 交差点に設置された各信号灯器の動作を1ステップごとに切り換えるためのステップ信号を発生する制御部19と、制御部19により発生されたステップ信号に基づいて複数のステップカウンタ27,28によりステップを計数して信号灯器の複数方向の動作を切り換える信号制御回路20と、を備えた信号制御装置18を複数の交差点に設置するとともに、交差点の上流側に交差点に向かう緊急車両を認識するジレンマ車両検出器17を設置し、信号制御回路18は、ジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青の延長制御または短縮制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は交通信号制御システムに係り、特に、ジレンマ車両を検出して、交差点内においてジレンマ車両を円滑にかつ優先的に走行させることを可能とした交通信号制御システムに関するものである。
【背景技術】
【0002】
一般に、現在の日本の道路交通信号機の制御においては、ステップ信号生成部から所定のピッチで出力されるステップ信号に基づいて、1ステップ毎に信号灯器を切り替えるステップ制御方式が採用されている。このステップ制御方式は、ステップ信号の変化がステップ単位にシリアルに行われるため、安全性の点では非常に優れた方式といえる。
【0003】
しかしながら、従来のステップ制御方式においては、各ステップの秒数をカウントするステップカウンタは1種類のみであり、上り下りを別々に制御することはできないという問題を有している。
【0004】
そのため、従来から、信号制御回路に複数のステップカウンタを備え、上り下りの信号制御を独立に行うようにして、交差点の各流入路ごとの交通状況に応じてリアルタイムな信号制御ができるようにした技術が開示されている(例えば、特許文献1参照)。
【0005】
そして、このような交通信号制御システムにおいては、従来から、信号灯器が青から黄色に変わり、交差点に進入した車両が進むべきか、停止するべき迷う場合があり、このようないわゆるジレンマが生じる領域に車両が進入した場合に、ジレンマ車両を検出して、ジレンマ車両が進入する方向の信号灯器を、ジレンマ車両が通過できるように青に制御したり、ジレンマ車両が停止できるように黄色から赤に制御するジレンマ制御を行っており、これにより、ジレンマ車両が交差点を通過するか、あいるは交差点で停止するかを迷うことなく交差点に到達することができるようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−268547号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の技術においては、ジレンマ制御を行う場合に、ジレンマ車両が進入する方向の信号灯器が青に制御されると、対向する車両に対する信号灯器も、青に制御されてしまうことから、例えば、ジレンマ車両が交差点を右折しようとすると、対向車両も青に制御されてしまうことから、対向車両も走行可能となっているため、ジレンマ車両の安全な走行を損なわれるおそれがあり、しかも、対向車両については、無駄な青信号を表示することになり、交通の流れを妨げてしまうという問題を有している。
【0008】
本発明は前記した点に鑑みてなされたものであり、ジレンマ車両を検出して、交差点内においてジレンマ車両を円滑にかつ優先的に走行させることのできる交通信号制御システムを提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は前記目的を達成するために、請求項1の発明に係る交通信号制御システムは、交差点に設置された各信号灯器の動作を1ステップごとに切り換えるためのステップ信号を発生する制御手段と、前記制御手段により発生されたステップ信号に基づいて複数のステップカウンタによりステップを計数して前記信号灯器の複数方向の動作を切り換える信号制御回路と、を備えた信号制御装置を交差点に設置し、
前記交差点の上流側に前記交差点に向かうジレンマ車両を検出してジレンマ車両検出信号を出力するジレンマ車両検出器を設置してなり、
前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青の延長制御または短縮制御することを特徴とする。
【0010】
請求項2に係る発明は、請求項1において、前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向と対向する方向の信号灯器を一時的に赤に制御することを特徴とする。
【0011】
請求項3に係る発明は、請求項1または請求項2において、前記ジレンマ車両検出器は、ジレンマ車両の有無およびジレンマ車両の速度を検出するものであり、
前記信号制御装置は、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度に基づいて、ジレンマ車両に対する信号灯器の制御の開始タイミングを決定することを特徴とする。
【発明の効果】
【0012】
請求項1に係る発明によれば、信号制御装置により、ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青に延長制御するようにしているので、交差点内において、ジレンマ車両を円滑にかつ優先的に走行させることができる。これにより、ジレンマ車両が交差点を通過するか、あいるは交差点で停止するかを迷うことなく交差点に到達することができる。
【0013】
請求項2に係る発明によれば、信号制御装置により、ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向と対向する方向の信号灯器を一時的に赤に制御するようにしているので、ジレンマ車両の走行方向と対向する方向に走行する車両を適正に停止させることができ、ジレンマ車両を円滑に走行させることができる。
【0014】
請求項3に係る発明によれば、ジレンマ車両検出器により、ジレンマ車両の有無およびジレンマ車両の速度を検出し、信号制御装置により、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度に基づいて、ジレンマ車両に対する信号灯器の制御の開始タイミングを決定するようにしているので、ジレンマ車両に対してタイミングよくジレンマ制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る交通信号制御システムの実施形態を示す概略図である。
【図2】本発明に係る交通信号制御システムの実施形態を示すブロック図である。
【図3】本発明に係る交通信号制御システムの実施形態における信号制御装置による通常の動作を示す現示階梯図である。
【図4】本発明に係る交通信号制御システムの実施形態における信号制御装置によるジレンマ車両検出時の動作を示す現示階梯図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について図面を参照しながら説明する。
【0017】
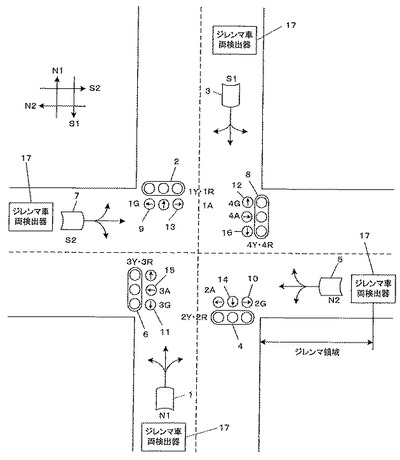
図1は本発明に係る交通信号制御システムの実施形態を示す概略図である。なお、説明の便宜上、この交差点では、図1の下方から上方に向かって走行する方向をN1方向、右方から左方に向かって走行する方向をN2方向、上方から下方に向かって走行する方向をS1方向、左方から右方に向かって走行する方向をS2方向とする。ただし、N1方向の右折信号は、S1方向の直進・左折信号と同じステップカウンタで制御するとともに、S1方向の右折信号は、N1方向の直進・左折信号と同じステップカウンタで制御し、N2方向の右折信号は、S2方向の直進・左折信号と同じステップカウンタで制御するとともに、S2方向の右折信号は、N2方向の直進・左折信号と同じステップカウンタで制御するように、逆方向で制御するようになっている。
【0018】
図1に示すように、交差点には、N1方向に走行するN1方向車両1に対するN1方向車両用信号機2、S1方向に走行するS1方向車両3に対するS1方向車両用信号機4、N2方向に走行するN2方向車両5に対するN2方向車両用信号機6およびS2方向に走行するS2方向車両7に対するS2方向車両用信号機8がそれぞれ設置されている。これら各信号機2,4,6,8には、車両用直進・左折可信号機9,10,11,12および車両用右折可信号機13,14,15,16がそれぞれ設けられている。なお、各信号機2,4,6,8には、黄色と赤色の各信号灯器が設けられており、以下の説明においては、これら各信号灯器を、1Y・1R,2Y・2R,3Y・3R,4Y・4Rで、車両用直進・左折可信号機9,10,11,12の信号灯器を1G,2G,3G,4Gで、車両用右折可信号機13,14,15,16の信号灯器を1A,2A,3A,4Aでそれぞれ表すこととする。
【0019】
さらに、本実施形態においては、交差点の上流側には、ジレンマ領域に進入する車両の有無および車両速度を検出するための、ジレンマ車両検出器17が設置されており、交差点の上流から車両が走行してきて、ジレンマ車両検出器17により車両がジレンマ領域に進入したことを検知してジレンマ車両検知信号を出力するように構成されている。
【0020】
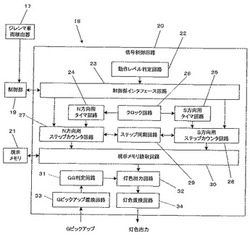
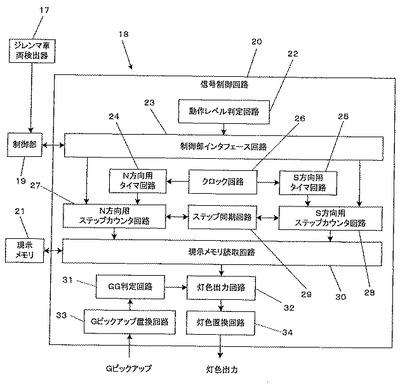
また、図2は本発明に係る交通情報システムの制御構成を示したものであり、本実施形態においては、図2に示すように、これら各信号機2,4,6,8を制御する信号制御装置18が設けられており、この信号制御装置18には、1ステップごとに信号灯器の動作を切り換えるためのステップ信号を発生する制御手段としての制御部19と、この制御部19により発生されたステップ信号に基づいて信号灯器の動作を切り換える信号制御回路20と、信号灯器を点灯する灯色データをステップ信号に対応して記憶する現示メモリ21と、がそれぞれ設けられている。
【0021】
また、信号制御回路20には、信号制御回路20の内部動作を監視する動作レベル判定回路22と、制御部19とのインタフェースを整合する制御部インタフェース回路23と、N1方向信号機およびN2方向信号機に対するステップの単位時間を設定するN方向用タイマ回路24と、S1方向信号機およびS2方向信号機に対するステップの単位時間を設定するS方向用タイマ回路25と、N方向用タイマ回路24およびS方向用タイマ回路25を駆動するクロック信号を発生するクロック回路26と、制御部19から発生されるステップ信号に基づいてN1方向車両用信号機2およびN2方向車両用信号機6に対するステップを計数するステップ計数手段としてのN方向用ステップカウンタ回路27と、S1方向車両用信号機4とS2方向車両用信号機8に対するステップを計数するステップ計数手段としてのS方向用ステップカウンタ回路28と、N方向用ステップカウンタ回路27およびS方向用ステップカウンタ回路28からそれぞれ発生されるステップ信号を同期させるステップ同期回路29と、現示メモリ21のデータを読み取る現示メモリ読取回路30と、原則的に同時点灯を不可とする信号灯器データを検出した場合に、信号灯器の灯色を強制的に変更するGG判定回路(灯色変更手段)31と、現示メモリ21に記憶された灯色データに基づいて信号灯器を点灯する灯色出力回路32と、がそれぞれ設けられている。
【0022】
なお、GG判定回路31の前段には、Gピックアップからの信号を置換するためのGピックアップ置換回路33が設けられており、灯色出力回路32の出力側には、灯色出力回路32からの出力信号を置換して灯色出力として出力する灯色置換回路34が設けられている。
【0023】
そして、本実施形態においては、ジレンマ車両検出器17からのジレンマ車両検出信号が信号制御装置18の制御部19に送られるように構成されており、制御部19は、ジレンマ車両のジレンマ車両検出信号に基づいて、信号灯器の制御を行うように構成されている。なお、このジレンマ車両に対する信号灯器の制御の開始タイミングは、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度により、決定されるものである。すなわち、ジレンマ車両検出器17の設置位置において、あらかじめ基準となる車両速度を設定しておき、ジレンマ車両の速度が基準となる車両速度より速い場合は、ジレンマ車両に対する信号灯器の青を延長制御するものであり、ジレンマ車両の速度が基準となる車両速度より遅い場合は、ジレンマ車両に対する信号灯器の青を短縮して赤に制御するものである。このように制御することにより、ジレンマ車両に対して、タイミングよくジレンマ制御を行うことができるものである。
【0024】
具体的には、例えば、ジレンマ車両検出器17により、N1方向から交差点に向かってジレンマ車両が走行していることを検出するとともに、ジレンマ車両の速度が基準となる車両速度より速い場合は、ジレンマ車両が当該交差点に進入するタイミングに合わせて、N1方向車両用信号2のN1方向車両用直進・左折可信号機9(1G)およびN1方向車両用右折可信号機13(1A)を青に制御するとともに、S1方向車両用信号4を一時的に赤に制御するように構成されている。また、例えば、ジレンマ車両検出器17により、N1方向から交差点に向かってジレンマ車両が走行していることを検出するとともに、ジレンマ車両の速度が基準となる車両速度より遅い場合は、N1方向車両用信号2のN1方向車両用直進・左折可信号機9(1G)およびN1方向車両用右折可信号機13(1A)をそれぞれ赤に制御するように構成されている。
【0025】
次に、本実施形態の動作について説明する。なお、本動作については、ジレンマ車両検出器17により、N1方向から交差点に向かってジレンマ車両が走行していることを検出するとともに、ジレンマ車両の速度が基準となる車両速度より速い場合の動作について説明する。
【0026】
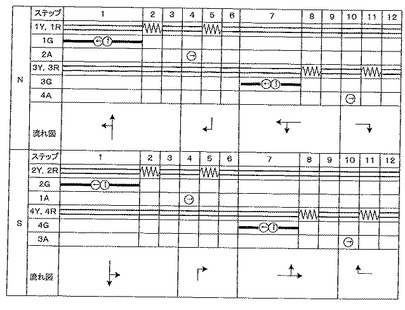
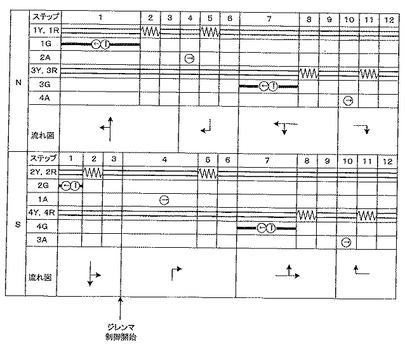
図3は本発明の信号制御システムにおける通常の動作を示す現示階梯図である。図3においては、横軸はステップ数を示し、縦軸は各信号名を示している。また、太い黒線上に矢印で示されているものは、矢印信号が点灯していることを示し、波線は信号機が黄であることを示し、二重線は信号機が赤であることを示している。
【0027】
まず、N方向のステップ1では、N1方向車両用信号機2(1Y、1R)は赤、N1方向車両用直進・左折可信号機9(1G)は点灯、S1方向車両用右折可信号機14(2A)は消灯に制御され、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、N1方向車両1は、1V方向車両用信号機(1Y、1R)が赤であるが、1V方向車両用直進・左折可信号機9(1G)が点灯しているため、直進および左折が可能である。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0028】
一方、S方向のステップ1では、S1方向車両用信号機4(2Y、2R)は赤、S1方向車両用直進・左折可信号機10(2G)は点灯、1V方向車両用右折可信号機13(1A)は消灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、S1方向車両3は、S1方向車両用信号機4(2Y、2R)が赤であるが、S1方向車両用直進・左折可信号機10(2G)が点灯しているため、直進および左折が可能である。また、S2方向車両7は、S2方向車両用信号機8(4Y、4R)により停止となる。
【0029】
次に、N方向のステップ2では、N1方向車両用信号機2(1Y、1R)は黄、N1方向車両用直進・左折可信号機(1G)は消灯、S1方向車両用右折可信号機14(2A)は消灯、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、N1方向車両1は、N1方向車両用信号機2(1Y、1R)が黄であるので停止となる。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0030】
一方、S方向のステップ2では、S1方向車両用信号機4(2Y、2R)は黄、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機(1A)は消灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、S2方向車両用右折可信号機16(4A)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、S1方向車両3はS1方向車両用信号機4(2Y、2R)が黄であるので停止となる。また、S2方向車両7は、S2方向車両用信号機8(4Y、4R)により停止となる。
【0031】
次に、N方向およびS方向のステップ3では、点灯している全ての信号機2,6が赤または消灯に制御される。したがって、N1方向車両1は、N1方向車両用信号機2(1Y、1R)により停止する。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0032】
次に、N方向のステップ4では、N1方向車両用信号機2(1Y、1R)は赤、N1方向車両用直進・左折可信号機9(1G)は消灯、S1方向車両用右折可信号機14(2A)は点灯、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、S1方向車両3は、S1方向車両用右折可信号機14(2A)が点灯しているため、右折可能となり、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0033】
一方、S方向のステップ4では、S1方向車両用信号機4(2Y、2R)は赤、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機13(1A)は点灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、N1方向車両1は、N1方向車両用右折可信号機13(1A)が点灯しているため、右折可能となり、S2方向車両7はS2方向車両用信号機8(4Y、4R)により停止となる。
【0034】
次に、N方向のステップ5では、N1方向車両用信号機2(1Y、1R)は黄、N1方向車両用直進・左折可信号機9(1G)は消灯、S1方向車両用右折可信号機14(2A)は消灯、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、N1方向車両1はN1方向車両用信号機2(1Y、1R)が黄であるので停止となる。また、N2方向車両5はN2方向車両用信号機6(3Y、3R)により停止となる。
【0035】
一方、S方向のステップ5では、S1方向車両用信号機4(2Y、2R)は黄、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機13(1A)は消灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、S1方向車両3はS1方向車両用信号機4(2Y、2R)が黄であるので注意して進行する。また、S2方向車両7はS2方向車両用信号機8(4Y、4R)により停止となる。
【0036】
次に、N方向およびS方向のステップ6では、点灯している全ての信号機2,6が赤または消灯に制御される。したがって、N1方向車両1は、N1方向車両用信号機2(1Y、1R)により停止する。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0037】
そして、ステップ6が終了した時点で、ステップ同期回路29により、N方向用ステップカウンタ回路27とS方向用ステップカウンタ回路28との立下りを合わせるようにして同期をとる。
【0038】
なお、ステップ7以降はN方向、S方向共に、車両用信号機2,4,6,8、車両用直進・左折可信号機9,10,11,12、車両用右折可信号機13,14,15,16がステップ1からステップ6までと同様の動作を繰り返すものであるため、その説明を省略する。
【0039】
次に、ジレンマ車両検出器17により、N1方向を走行するジレンマ車両を認識した場合には、N1方向をステップ1で保持したままS1方向をステップ4に歩進させる。これにより、図4に示すように、N1方向車両用信号機2(1Y、1R)は赤、N1方向車両用直進・左折可信号機9(1G)は点灯、S1方向車両用右折可信号機14(2A)は消灯に制御されている状態で、S1方向車両信号機4は赤、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機13(1A)は点灯に制御される。これにより、S1方向車両3は停止となり、ジレンマ車両を含むN1方向車両1のみが直進方向、左折方向、右折方向の任意の方向に走行することが可能となる。そして、ジレンマ車両が交差点を通過するに十分な時間が経過したら、N1方向車両用直進・左折可信号機9(1G)を赤に制御するとともに、S1方向車両用右折可信号機14(2A)を点灯して、通常の制御に戻る。
【0040】
以上述べたように、本実施形態においては、交差点に進入するジレンマ車両をジレンマ車両検出器17により検出した場合に、ジレンマ車両が走行する方向の信号を青に延長制御するようにしているので、交差点内において、ジレンマ車両を円滑にかつ優先的に走行させることができる。これにより、ジレンマ車両が交差点を通過するか、あいるは交差点で停止するかを迷うことなく交差点に到達することができる。
【0041】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0042】
1 N1方向車両
2 N1方向車両用信号機
3 S1方向車両
4 S1方向車両用信号機
5 N2方向車両
6 N2方向車両用信号機
7 S2方向車両
8 S2方向車両用信号機
9 N1方向車両用直進・左折可信号機
10 S1方向車両用直進・左折可信号機
11 N2方向車両用直進・左折可信号機
12 S2方向車両用直進・左折可信号機
13 N12方向車両用右折可信号機
14 S1方向車両用右折可信号機
15 N2方向車両用右折可信号機
16 S2方向車両用右折可信号機
17 ジレンマ車両検出器
18 信号制御装置
19 制御部
20 信号制御回路
21 現示メモリ
22 動作レベル判定回路
27 N方向用ステップカウンタ回路
28 S方向用ステップカウンタ回路
29 ステップ同期回路
【技術分野】
【0001】
本発明は交通信号制御システムに係り、特に、ジレンマ車両を検出して、交差点内においてジレンマ車両を円滑にかつ優先的に走行させることを可能とした交通信号制御システムに関するものである。
【背景技術】
【0002】
一般に、現在の日本の道路交通信号機の制御においては、ステップ信号生成部から所定のピッチで出力されるステップ信号に基づいて、1ステップ毎に信号灯器を切り替えるステップ制御方式が採用されている。このステップ制御方式は、ステップ信号の変化がステップ単位にシリアルに行われるため、安全性の点では非常に優れた方式といえる。
【0003】
しかしながら、従来のステップ制御方式においては、各ステップの秒数をカウントするステップカウンタは1種類のみであり、上り下りを別々に制御することはできないという問題を有している。
【0004】
そのため、従来から、信号制御回路に複数のステップカウンタを備え、上り下りの信号制御を独立に行うようにして、交差点の各流入路ごとの交通状況に応じてリアルタイムな信号制御ができるようにした技術が開示されている(例えば、特許文献1参照)。
【0005】
そして、このような交通信号制御システムにおいては、従来から、信号灯器が青から黄色に変わり、交差点に進入した車両が進むべきか、停止するべき迷う場合があり、このようないわゆるジレンマが生じる領域に車両が進入した場合に、ジレンマ車両を検出して、ジレンマ車両が進入する方向の信号灯器を、ジレンマ車両が通過できるように青に制御したり、ジレンマ車両が停止できるように黄色から赤に制御するジレンマ制御を行っており、これにより、ジレンマ車両が交差点を通過するか、あいるは交差点で停止するかを迷うことなく交差点に到達することができるようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−268547号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の技術においては、ジレンマ制御を行う場合に、ジレンマ車両が進入する方向の信号灯器が青に制御されると、対向する車両に対する信号灯器も、青に制御されてしまうことから、例えば、ジレンマ車両が交差点を右折しようとすると、対向車両も青に制御されてしまうことから、対向車両も走行可能となっているため、ジレンマ車両の安全な走行を損なわれるおそれがあり、しかも、対向車両については、無駄な青信号を表示することになり、交通の流れを妨げてしまうという問題を有している。
【0008】
本発明は前記した点に鑑みてなされたものであり、ジレンマ車両を検出して、交差点内においてジレンマ車両を円滑にかつ優先的に走行させることのできる交通信号制御システムを提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は前記目的を達成するために、請求項1の発明に係る交通信号制御システムは、交差点に設置された各信号灯器の動作を1ステップごとに切り換えるためのステップ信号を発生する制御手段と、前記制御手段により発生されたステップ信号に基づいて複数のステップカウンタによりステップを計数して前記信号灯器の複数方向の動作を切り換える信号制御回路と、を備えた信号制御装置を交差点に設置し、
前記交差点の上流側に前記交差点に向かうジレンマ車両を検出してジレンマ車両検出信号を出力するジレンマ車両検出器を設置してなり、
前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青の延長制御または短縮制御することを特徴とする。
【0010】
請求項2に係る発明は、請求項1において、前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向と対向する方向の信号灯器を一時的に赤に制御することを特徴とする。
【0011】
請求項3に係る発明は、請求項1または請求項2において、前記ジレンマ車両検出器は、ジレンマ車両の有無およびジレンマ車両の速度を検出するものであり、
前記信号制御装置は、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度に基づいて、ジレンマ車両に対する信号灯器の制御の開始タイミングを決定することを特徴とする。
【発明の効果】
【0012】
請求項1に係る発明によれば、信号制御装置により、ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青に延長制御するようにしているので、交差点内において、ジレンマ車両を円滑にかつ優先的に走行させることができる。これにより、ジレンマ車両が交差点を通過するか、あいるは交差点で停止するかを迷うことなく交差点に到達することができる。
【0013】
請求項2に係る発明によれば、信号制御装置により、ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向と対向する方向の信号灯器を一時的に赤に制御するようにしているので、ジレンマ車両の走行方向と対向する方向に走行する車両を適正に停止させることができ、ジレンマ車両を円滑に走行させることができる。
【0014】
請求項3に係る発明によれば、ジレンマ車両検出器により、ジレンマ車両の有無およびジレンマ車両の速度を検出し、信号制御装置により、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度に基づいて、ジレンマ車両に対する信号灯器の制御の開始タイミングを決定するようにしているので、ジレンマ車両に対してタイミングよくジレンマ制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る交通信号制御システムの実施形態を示す概略図である。
【図2】本発明に係る交通信号制御システムの実施形態を示すブロック図である。
【図3】本発明に係る交通信号制御システムの実施形態における信号制御装置による通常の動作を示す現示階梯図である。
【図4】本発明に係る交通信号制御システムの実施形態における信号制御装置によるジレンマ車両検出時の動作を示す現示階梯図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について図面を参照しながら説明する。
【0017】
図1は本発明に係る交通信号制御システムの実施形態を示す概略図である。なお、説明の便宜上、この交差点では、図1の下方から上方に向かって走行する方向をN1方向、右方から左方に向かって走行する方向をN2方向、上方から下方に向かって走行する方向をS1方向、左方から右方に向かって走行する方向をS2方向とする。ただし、N1方向の右折信号は、S1方向の直進・左折信号と同じステップカウンタで制御するとともに、S1方向の右折信号は、N1方向の直進・左折信号と同じステップカウンタで制御し、N2方向の右折信号は、S2方向の直進・左折信号と同じステップカウンタで制御するとともに、S2方向の右折信号は、N2方向の直進・左折信号と同じステップカウンタで制御するように、逆方向で制御するようになっている。
【0018】
図1に示すように、交差点には、N1方向に走行するN1方向車両1に対するN1方向車両用信号機2、S1方向に走行するS1方向車両3に対するS1方向車両用信号機4、N2方向に走行するN2方向車両5に対するN2方向車両用信号機6およびS2方向に走行するS2方向車両7に対するS2方向車両用信号機8がそれぞれ設置されている。これら各信号機2,4,6,8には、車両用直進・左折可信号機9,10,11,12および車両用右折可信号機13,14,15,16がそれぞれ設けられている。なお、各信号機2,4,6,8には、黄色と赤色の各信号灯器が設けられており、以下の説明においては、これら各信号灯器を、1Y・1R,2Y・2R,3Y・3R,4Y・4Rで、車両用直進・左折可信号機9,10,11,12の信号灯器を1G,2G,3G,4Gで、車両用右折可信号機13,14,15,16の信号灯器を1A,2A,3A,4Aでそれぞれ表すこととする。
【0019】
さらに、本実施形態においては、交差点の上流側には、ジレンマ領域に進入する車両の有無および車両速度を検出するための、ジレンマ車両検出器17が設置されており、交差点の上流から車両が走行してきて、ジレンマ車両検出器17により車両がジレンマ領域に進入したことを検知してジレンマ車両検知信号を出力するように構成されている。
【0020】
また、図2は本発明に係る交通情報システムの制御構成を示したものであり、本実施形態においては、図2に示すように、これら各信号機2,4,6,8を制御する信号制御装置18が設けられており、この信号制御装置18には、1ステップごとに信号灯器の動作を切り換えるためのステップ信号を発生する制御手段としての制御部19と、この制御部19により発生されたステップ信号に基づいて信号灯器の動作を切り換える信号制御回路20と、信号灯器を点灯する灯色データをステップ信号に対応して記憶する現示メモリ21と、がそれぞれ設けられている。
【0021】
また、信号制御回路20には、信号制御回路20の内部動作を監視する動作レベル判定回路22と、制御部19とのインタフェースを整合する制御部インタフェース回路23と、N1方向信号機およびN2方向信号機に対するステップの単位時間を設定するN方向用タイマ回路24と、S1方向信号機およびS2方向信号機に対するステップの単位時間を設定するS方向用タイマ回路25と、N方向用タイマ回路24およびS方向用タイマ回路25を駆動するクロック信号を発生するクロック回路26と、制御部19から発生されるステップ信号に基づいてN1方向車両用信号機2およびN2方向車両用信号機6に対するステップを計数するステップ計数手段としてのN方向用ステップカウンタ回路27と、S1方向車両用信号機4とS2方向車両用信号機8に対するステップを計数するステップ計数手段としてのS方向用ステップカウンタ回路28と、N方向用ステップカウンタ回路27およびS方向用ステップカウンタ回路28からそれぞれ発生されるステップ信号を同期させるステップ同期回路29と、現示メモリ21のデータを読み取る現示メモリ読取回路30と、原則的に同時点灯を不可とする信号灯器データを検出した場合に、信号灯器の灯色を強制的に変更するGG判定回路(灯色変更手段)31と、現示メモリ21に記憶された灯色データに基づいて信号灯器を点灯する灯色出力回路32と、がそれぞれ設けられている。
【0022】
なお、GG判定回路31の前段には、Gピックアップからの信号を置換するためのGピックアップ置換回路33が設けられており、灯色出力回路32の出力側には、灯色出力回路32からの出力信号を置換して灯色出力として出力する灯色置換回路34が設けられている。
【0023】
そして、本実施形態においては、ジレンマ車両検出器17からのジレンマ車両検出信号が信号制御装置18の制御部19に送られるように構成されており、制御部19は、ジレンマ車両のジレンマ車両検出信号に基づいて、信号灯器の制御を行うように構成されている。なお、このジレンマ車両に対する信号灯器の制御の開始タイミングは、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度により、決定されるものである。すなわち、ジレンマ車両検出器17の設置位置において、あらかじめ基準となる車両速度を設定しておき、ジレンマ車両の速度が基準となる車両速度より速い場合は、ジレンマ車両に対する信号灯器の青を延長制御するものであり、ジレンマ車両の速度が基準となる車両速度より遅い場合は、ジレンマ車両に対する信号灯器の青を短縮して赤に制御するものである。このように制御することにより、ジレンマ車両に対して、タイミングよくジレンマ制御を行うことができるものである。
【0024】
具体的には、例えば、ジレンマ車両検出器17により、N1方向から交差点に向かってジレンマ車両が走行していることを検出するとともに、ジレンマ車両の速度が基準となる車両速度より速い場合は、ジレンマ車両が当該交差点に進入するタイミングに合わせて、N1方向車両用信号2のN1方向車両用直進・左折可信号機9(1G)およびN1方向車両用右折可信号機13(1A)を青に制御するとともに、S1方向車両用信号4を一時的に赤に制御するように構成されている。また、例えば、ジレンマ車両検出器17により、N1方向から交差点に向かってジレンマ車両が走行していることを検出するとともに、ジレンマ車両の速度が基準となる車両速度より遅い場合は、N1方向車両用信号2のN1方向車両用直進・左折可信号機9(1G)およびN1方向車両用右折可信号機13(1A)をそれぞれ赤に制御するように構成されている。
【0025】
次に、本実施形態の動作について説明する。なお、本動作については、ジレンマ車両検出器17により、N1方向から交差点に向かってジレンマ車両が走行していることを検出するとともに、ジレンマ車両の速度が基準となる車両速度より速い場合の動作について説明する。
【0026】
図3は本発明の信号制御システムにおける通常の動作を示す現示階梯図である。図3においては、横軸はステップ数を示し、縦軸は各信号名を示している。また、太い黒線上に矢印で示されているものは、矢印信号が点灯していることを示し、波線は信号機が黄であることを示し、二重線は信号機が赤であることを示している。
【0027】
まず、N方向のステップ1では、N1方向車両用信号機2(1Y、1R)は赤、N1方向車両用直進・左折可信号機9(1G)は点灯、S1方向車両用右折可信号機14(2A)は消灯に制御され、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、N1方向車両1は、1V方向車両用信号機(1Y、1R)が赤であるが、1V方向車両用直進・左折可信号機9(1G)が点灯しているため、直進および左折が可能である。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0028】
一方、S方向のステップ1では、S1方向車両用信号機4(2Y、2R)は赤、S1方向車両用直進・左折可信号機10(2G)は点灯、1V方向車両用右折可信号機13(1A)は消灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、S1方向車両3は、S1方向車両用信号機4(2Y、2R)が赤であるが、S1方向車両用直進・左折可信号機10(2G)が点灯しているため、直進および左折が可能である。また、S2方向車両7は、S2方向車両用信号機8(4Y、4R)により停止となる。
【0029】
次に、N方向のステップ2では、N1方向車両用信号機2(1Y、1R)は黄、N1方向車両用直進・左折可信号機(1G)は消灯、S1方向車両用右折可信号機14(2A)は消灯、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、N1方向車両1は、N1方向車両用信号機2(1Y、1R)が黄であるので停止となる。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0030】
一方、S方向のステップ2では、S1方向車両用信号機4(2Y、2R)は黄、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機(1A)は消灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、S2方向車両用右折可信号機16(4A)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、S1方向車両3はS1方向車両用信号機4(2Y、2R)が黄であるので停止となる。また、S2方向車両7は、S2方向車両用信号機8(4Y、4R)により停止となる。
【0031】
次に、N方向およびS方向のステップ3では、点灯している全ての信号機2,6が赤または消灯に制御される。したがって、N1方向車両1は、N1方向車両用信号機2(1Y、1R)により停止する。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0032】
次に、N方向のステップ4では、N1方向車両用信号機2(1Y、1R)は赤、N1方向車両用直進・左折可信号機9(1G)は消灯、S1方向車両用右折可信号機14(2A)は点灯、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、S1方向車両3は、S1方向車両用右折可信号機14(2A)が点灯しているため、右折可能となり、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0033】
一方、S方向のステップ4では、S1方向車両用信号機4(2Y、2R)は赤、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機13(1A)は点灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、N1方向車両1は、N1方向車両用右折可信号機13(1A)が点灯しているため、右折可能となり、S2方向車両7はS2方向車両用信号機8(4Y、4R)により停止となる。
【0034】
次に、N方向のステップ5では、N1方向車両用信号機2(1Y、1R)は黄、N1方向車両用直進・左折可信号機9(1G)は消灯、S1方向車両用右折可信号機14(2A)は消灯、N2方向車両用信号機6(3Y、3R)は赤、N2方向車両用直進・左折可信号機11(3G)は消灯、S2方向車両用右折可信号機16(4A)は消灯に制御される。したがって、N1方向車両1はN1方向車両用信号機2(1Y、1R)が黄であるので停止となる。また、N2方向車両5はN2方向車両用信号機6(3Y、3R)により停止となる。
【0035】
一方、S方向のステップ5では、S1方向車両用信号機4(2Y、2R)は黄、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機13(1A)は消灯、S2方向車両用信号機8(4Y、4R)は赤、S2方向車両用直進・左折可信号機12(4G)は消灯、N2方向車両用右折可信号機15(3A)は消灯に制御される。したがって、S1方向車両3はS1方向車両用信号機4(2Y、2R)が黄であるので注意して進行する。また、S2方向車両7はS2方向車両用信号機8(4Y、4R)により停止となる。
【0036】
次に、N方向およびS方向のステップ6では、点灯している全ての信号機2,6が赤または消灯に制御される。したがって、N1方向車両1は、N1方向車両用信号機2(1Y、1R)により停止する。また、N2方向車両5は、N2方向車両用信号機6(3Y、3R)により停止となる。
【0037】
そして、ステップ6が終了した時点で、ステップ同期回路29により、N方向用ステップカウンタ回路27とS方向用ステップカウンタ回路28との立下りを合わせるようにして同期をとる。
【0038】
なお、ステップ7以降はN方向、S方向共に、車両用信号機2,4,6,8、車両用直進・左折可信号機9,10,11,12、車両用右折可信号機13,14,15,16がステップ1からステップ6までと同様の動作を繰り返すものであるため、その説明を省略する。
【0039】
次に、ジレンマ車両検出器17により、N1方向を走行するジレンマ車両を認識した場合には、N1方向をステップ1で保持したままS1方向をステップ4に歩進させる。これにより、図4に示すように、N1方向車両用信号機2(1Y、1R)は赤、N1方向車両用直進・左折可信号機9(1G)は点灯、S1方向車両用右折可信号機14(2A)は消灯に制御されている状態で、S1方向車両信号機4は赤、S1方向車両用直進・左折可信号機10(2G)は消灯、N1方向車両用右折可信号機13(1A)は点灯に制御される。これにより、S1方向車両3は停止となり、ジレンマ車両を含むN1方向車両1のみが直進方向、左折方向、右折方向の任意の方向に走行することが可能となる。そして、ジレンマ車両が交差点を通過するに十分な時間が経過したら、N1方向車両用直進・左折可信号機9(1G)を赤に制御するとともに、S1方向車両用右折可信号機14(2A)を点灯して、通常の制御に戻る。
【0040】
以上述べたように、本実施形態においては、交差点に進入するジレンマ車両をジレンマ車両検出器17により検出した場合に、ジレンマ車両が走行する方向の信号を青に延長制御するようにしているので、交差点内において、ジレンマ車両を円滑にかつ優先的に走行させることができる。これにより、ジレンマ車両が交差点を通過するか、あいるは交差点で停止するかを迷うことなく交差点に到達することができる。
【0041】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0042】
1 N1方向車両
2 N1方向車両用信号機
3 S1方向車両
4 S1方向車両用信号機
5 N2方向車両
6 N2方向車両用信号機
7 S2方向車両
8 S2方向車両用信号機
9 N1方向車両用直進・左折可信号機
10 S1方向車両用直進・左折可信号機
11 N2方向車両用直進・左折可信号機
12 S2方向車両用直進・左折可信号機
13 N12方向車両用右折可信号機
14 S1方向車両用右折可信号機
15 N2方向車両用右折可信号機
16 S2方向車両用右折可信号機
17 ジレンマ車両検出器
18 信号制御装置
19 制御部
20 信号制御回路
21 現示メモリ
22 動作レベル判定回路
27 N方向用ステップカウンタ回路
28 S方向用ステップカウンタ回路
29 ステップ同期回路
【特許請求の範囲】
【請求項1】
交差点に設置された各信号灯器の動作を1ステップごとに切り換えるためのステップ信号を発生する制御手段と、前記制御手段により発生されたステップ信号に基づいて複数のステップカウンタによりステップを計数して前記信号灯器の複数方向の動作を切り換える信号制御回路と、を備えた信号制御装置を交差点に設置し、
前記交差点の上流側に前記交差点に向かうジレンマ車両を検出してジレンマ車両検出信号を出力するジレンマ車両検出器を設置してなり、
前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青の延長制御または短縮制御することを特徴とする交通信号制御システム。
【請求項2】
前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向と対向する方向の信号灯器を一時的に赤に制御することを特徴とする請求項1に記載の交通信号制御システム。
【請求項3】
前記ジレンマ車両検出器は、ジレンマ車両の有無およびジレンマ車両の速度を検出するものであり、
前記信号制御装置は、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度に基づいて、ジレンマ車両に対する信号灯器の制御の開始タイミングを決定することを特徴とする請求項1または請求項2に記載の交通信号制御システム。
【請求項1】
交差点に設置された各信号灯器の動作を1ステップごとに切り換えるためのステップ信号を発生する制御手段と、前記制御手段により発生されたステップ信号に基づいて複数のステップカウンタによりステップを計数して前記信号灯器の複数方向の動作を切り換える信号制御回路と、を備えた信号制御装置を交差点に設置し、
前記交差点の上流側に前記交差点に向かうジレンマ車両を検出してジレンマ車両検出信号を出力するジレンマ車両検出器を設置してなり、
前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向の信号灯器を青の延長制御または短縮制御することを特徴とする交通信号制御システム。
【請求項2】
前記信号制御装置は、前記ジレンマ車両検出器によるジレンマ車両検出信号に基づいて、ジレンマ車両の走行方向と対向する方向の信号灯器を一時的に赤に制御することを特徴とする請求項1に記載の交通信号制御システム。
【請求項3】
前記ジレンマ車両検出器は、ジレンマ車両の有無およびジレンマ車両の速度を検出するものであり、
前記信号制御装置は、ジレンマ車両の検出位置から交差点までの距離およびジレンマ車両の速度に基づいて、ジレンマ車両に対する信号灯器の制御の開始タイミングを決定することを特徴とする請求項1または請求項2に記載の交通信号制御システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−243056(P2012−243056A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−112034(P2011−112034)
【出願日】平成23年5月19日(2011.5.19)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月19日(2011.5.19)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]