
交通信号制御機及び交通信号制御機の異常判定方法
【課題】異常時においても動作を保証することができる交通信号制御機及び交通信号制御機の異常判定方法を提供する。
【解決手段】予定情報判定回路26は、CPU10が生成した先後の歩進予定情報同士の正誤を判定する。例えば、予定情報判定回路26は、先に(以前に)取得した歩進予定情報と後に(今回)取得した歩進予定情報との間で矛盾がないかどうか(例えば、後に取得した歩進予定情報の表示時間の時間範囲が、先に取得した歩進予定情報の表示時間の時間範囲よりも広がっていないかどうか)を判定する。歩進受付回路23は、予定情報判定回路26での判定結果により下限監視タイマ24及び上限監視タイマ25にセットされた下限時間及び上限時間を用いて、CPU10からの歩進指令の正誤を判定する。
【解決手段】予定情報判定回路26は、CPU10が生成した先後の歩進予定情報同士の正誤を判定する。例えば、予定情報判定回路26は、先に(以前に)取得した歩進予定情報と後に(今回)取得した歩進予定情報との間で矛盾がないかどうか(例えば、後に取得した歩進予定情報の表示時間の時間範囲が、先に取得した歩進予定情報の表示時間の時間範囲よりも広がっていないかどうか)を判定する。歩進受付回路23は、予定情報判定回路26での判定結果により下限監視タイマ24及び上限監視タイマ25にセットされた下限時間及び上限時間を用いて、CPU10からの歩進指令の正誤を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交通信号制御機及び交通信号制御機の異常判定方法に関する。
【背景技術】
【0002】
交通事故抑止又は円滑な交通のために、道路上を走行する車両に対して信号情報などの交通情報を提供する路車協調システムに関する技術開発が行われている。例えば、車両に正確な信号情報を提供するために、路上装置に信号情報を送信した後、その路上装置が車両に信号情報を送信するまでの通信所要時間を算出しておき、信号情報をその通信所要時間に基づいて補正して路上装置へ送信する路上通信システムが開示されている(特許文献1参照)。
【0003】
また、信号機の作動情報を受信し、交差点を安全に走行するための速度や、交差点で停止するための速度などの走行条件を算出して車両の安全走行を実現することができる信号機連動式車両速度制御装置が開示されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−152680号公報
【特許文献2】特許第2806801号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のような路車協調システムでは、信号機が設置された交差点と車両に信号情報を提供する地点との間は、車両に余裕をもって信号情報を提供する必要性から、所要の距離が設定されている。このため、車両に信号情報を提供してから実際に車両が交差点を通過するまでの間に、道路状況や車両の走行状態などに応じた時間を要する。車両が信号情報を受信してから交差点を通過するまでの間に、信号機の動作(例えば、信号灯の点灯変化タイミング)が変更された場合、車両には結果として信号灯器の実際の表示とは変化タイミングが異なる信号情報(変更前の信号情報)が送信されたことになる。
【0006】
このような場合、信号灯器の実際の表示とは変化タイミングが異なる信号情報に基づいて車両の走行状態を制御するような自動制御運転が行われている車両と、信号情報の提供を受けずに自動制御運転が行われていない車両との間では、信号情報(例えば、信号機の点灯変化タイミング)が異なる事態が発生する。このため、両方の車両が異なる信号情報に基づいて走行することになり、運転者が運転中に混乱する可能性がある。
【0007】
また、カーナビゲーション装置等で信号機の点灯変化タイミングを表示するようなシステムでは、信号灯器の実際の表示とは変化タイミングが異なる信号情報に基づいて信号機の点灯変化タイミングを表示した場合、運転者がカーナビゲーション装置を見て判断する点灯変化タイミングと、実際の信号灯の変化タイミングとが異なるため、運転者の注意がそがれる場合や思いがけない走行(急減速や急加速など)を行わなければならない場合が生じる。
【0008】
信号機の動作が変更される場合としては、例えば、信号機の動作を制御しているCPUが何らかの原因で異常となったときがあり、このような場合に信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供される可能性が高い。従って、このような異常が発生した場合でも、信号機の動作を保証することが望まれていた。
【0009】
本発明は、斯かる事情に鑑みてなされたものであり、異常時においても動作を保証することができる交通信号制御機及び交通信号制御機の異常判定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
第1発明に係る交通信号制御機は、演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、前記演算部は、信号灯色の表示時間情報を繰返し生成するようにしてあり、前記灯色制御部は、前記演算部が生成した先後の表示時間情報同士の正誤を判定する第1判定部と、該第1判定部で判定した判定結果に基づいて、前記演算部からの歩進指令の正誤を判定する第2判定部とを備えることを特徴とする。
【0011】
第2発明に係る交通信号制御機は、第1発明において、前記表示時間情報は、信号灯色の表示限度時間を含み、前記第1判定部は、表示時間情報の表示限度時間が、先の表示時間情報の表示限度時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする。
【0012】
第3発明に係る交通信号制御機は、第1発明又は第2発明において、前記表示時間情報は、信号灯色の残表示限度時間を含み、前記第1判定部は、表示時間情報の残表示限度時間が、先の表示時間情報の残表示限度時間から前記先後の時間差を減算した時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする。
【0013】
第4発明に係る交通信号制御機は、第1発明乃至第3発明のいずれか1つにおいて、前記表示時間情報を記憶する記憶部と、前記第1判定部で表示時間情報が正しいと判定した場合、記憶した表示時間情報を正しいと判定した表示時間情報で更新する更新部とを備えることを特徴とする。
【0014】
第5発明に係る交通信号制御機は、第1発明乃至第4発明のいずれか1つにおいて、前記第1判定部で表示時間情報が正しいと判定した場合、該表示時間情報を含む所定の信号情報を外部へ送信する送信部を備えることを特徴とする。
【0015】
第6発明に係る交通信号制御機は、第5発明において、前記送信部は、前記第1判定部で表示時間情報が誤りと判定した場合、前記信号情報の送信を停止するように構成してあることを特徴とする。
【0016】
第7発明に係る交通信号制御機は、第1発明乃至第6発明のいずれか1つにおいて、前記第1判定部で表示時間情報が誤りと判定した場合、該表示時間情報を無効にする無効部を備えることを特徴とする。
【0017】
第8発明に係る交通信号制御機は、第1発明乃至第4発明のいずれか1つにおいて、前記灯色制御部は、前記第1判定部で判定した判定結果を前記演算部へ出力するように構成してあり、前記演算部は、前記判定結果に応じて、所定の信号情報を外部へ出力するか否かを決定するように構成してあることを特徴とする。
【0018】
第9発明に係る交通信号制御機は、第1発明乃至第8発明のいずれか1つにおいて、前記灯色制御部は、前記第2判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする。
【0019】
第10発明に係る交通信号制御機は、第1発明乃至第9発明のいずれか1つにおいて、前記演算部は、プログラムコードにより動作を決定するように構成してあり、前記灯色制御部は、ハードウエア回路自体の構成により動作を決定するように構成してあることを特徴とする。
【0020】
第11発明に係る交通信号制御機は、第10発明において、前記演算部には、オペレーティングシステムを搭載してあることを特徴とする。
【0021】
第12発明に係る交通信号制御機は、演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、前記演算部は、信号灯色の表示時間情報を生成するようにしてあり、前記演算部で生成した表示時間情報を外部へ送信する送信部を備え、前記灯色制御部は、前記演算部が生成した表示時間情報に基づいて、前記演算部からの歩進指令の正誤を判定する判定部を備え、該判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする。
【0022】
第13発明に係る交通信号制御機の異常判定方法は、演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部を備える交通信号制御機の異常判定方法において、信号灯色の表示時間情報を前記演算部により繰返し生成し、前記灯色制御部は、生成された先後の表示時間情報同士の正誤を第1判定部により判定し、判定された判定結果に基づいて、前記演算部からの歩進指令の正誤を第2判定部により判定することを特徴とする。
【0023】
第1発明及び第13発明にあっては、演算部(例えば、CPU)は、信号灯色の表示時間情報を繰返し(例えば、毎秒、数秒経過の都度など)生成する。表示時間情報(例えば、歩進予定情報)は、例えば、信号灯器の現在ステップにおける残り表示時間及び将来ステップにおける表示時間を含み、表示時間は、下限時間と上限時間の2つの時間からなる範囲で表現することができる。灯色制御部の第1判定部は、演算部が生成した先後の表示時間情報同士の正誤を判定する。例えば、先に(以前に)取得した表示時間情報と後に(今回)取得した表示時間情報との間で表示時間に矛盾がないかどうかを判定する。両方の表示時間情報に矛盾がある場合には、演算部に何らかの異常が発生したことを検知することができる。
【0024】
灯色制御部の第2判定部は、第1判定部で判定した判定結果に基づいて、演算部からの歩進指令の正誤を判定する。なお、歩進指令は、信号灯色の表示ステップを次のステップに進めるための指令である。第1判定部で表示時間情報に矛盾がなく正しいと判定した場合には、後の表示時間情報に基づいて歩進指令の正誤を判定する。例えば、現在ステップにおける残り表示時間内(下限時間と上限時間の範囲内)に演算部から歩進指令が出力された場合には、その歩進指令は正常(すなわち、演算部は正常)であると判定することができ、また、現在ステップにおける残り表示時間外に歩進指令が出力された場合(例えば、下限時間よりも短い時間内に歩進指令が出力された場合)、あるいは上限時間を過ぎても歩進指令が出力されない場合には、演算部は異常であると判定することができる。演算部が異常であると判定した場合に、演算部で生成した表示時間情報や歩進指令を採用しないようにし、演算部が正常であったときの表示時間情報を採用すれば、演算部による誤った動作を防止することができ、異常時においても動作を保証することができる。また、演算部の異常を灯色制御部が判定する構成としているので、演算部の正常、異常を正確に検知することができる。
【0025】
第2発明にあっては、表示時間情報は、信号灯色の表示限度時間を含み、第1判定部は、表示時間情報の表示限度時間が、先の表示時間情報の表示限度時間に含まれるか又は一致する場合、表示時間情報が正しいと判定する。表示限度時間は、例えば、信号灯器の現在ステップにおける残り表示時間及び将来ステップにおける表示時間であり、下限時間と上限時間の2つの時間からなる範囲で表現することができる。なお、下限時間と上限時間が同じ時間であってもよい。例えば、先の(以前に取得した)表示限度時間が3秒以上5秒以下である場合に、今回取得した(後の)表示限度時間が3秒以上4秒以下であれば、表示限度時間が先の表示限度時間に含まれるので、両者の表示時間情報に矛盾がないと判定することができる。また、先の(以前に取得した)表示限度時間が3秒以上5秒以下である場合に、今回取得した(後の)表示限度時間が3秒以上6秒以下であれば、表示限度時間が先の表示限度時間に含まれないので、両者の表示時間情報に矛盾があると判定することができ、演算部に異常があることを検知することができる。
【0026】
これにより、信号灯色の切り替わりタイミングが交通状況等により変更になる場合でも、過去に決定された表示限度時間の範囲を越えないように表示限度時間を決定することができるので、一旦決定された表示限度時間の範囲外で信号灯色が切り替わるという事態を防ぎ、運転者が混乱することを防止することができる。また、一旦決定された表示限度時間の範囲内であれば限度時間が変化しても運転者が混乱することもない。
【0027】
第3発明にあっては、表示時間情報は、残表示限度時間を含み、第1判定部は、今回取得した(後の)表示時間情報の残表示限度時間が、先の表示時間情報の残表示限度時間から先後の時間差(先の表示時間情報と後の表示時間情報との時間差)を減算した時間に含まれるか又は一致する場合、表示時間情報が正しいと判定する。現在表示中の信号灯色の残表示限度時間は、信号灯器の現在ステップにおける残り表示時間であり、下限時間と上限時間の2つの時間からなる範囲で表現することができる。なお、下限時間と上限時間が同じ時間であってもよい。例えば、先の(以前に取得した)残表示限度時間が13秒以上25秒以下である場合に、先の表示時間情報の5秒後に(今回の)表示時間情報が生成(又は取得)されたときは、先の表示時間情報の残表示限度時間から先後の時間差を減算した時間は、8(=13−5)秒以上20(=25−5)秒以下となる。そして、(今回取得した残表示限度時間が10秒以上20秒以下であれば、残表示限度時間が、先の残表示限度時間から先後の時間差を減算した時間に含まれるので、両者の表示時間情報に矛盾がないと判定することができる。
【0028】
また、先の(以前に取得した)残表示限度時間が13秒以上25秒以下である場合に、先の表示時間情報の5秒後に(今回の)表示時間情報が生成(又は取得)されたときは、先の表示時間情報の残表示限度時間から先後の時間差を減算した時間は、8(=13−5)秒以上20(=25−5)秒以下となる。そして、(今回取得した)残表示限度時間が10秒以上25秒以下であれば、残表示限度時間が、先の残表示限度時間から先後の時間差を減算した時間に含まれないので、両者の表示時間情報に矛盾があり、演算部に異常があることを検知することができる。
【0029】
これにより、信号灯色の切り替わりタイミングが交通状況等により変更になる場合でも、過去に決定された残表示限度時間の範囲を越えないように残表示限度時間を決定することができるので、一旦決定された信号灯器の現在ステップにおける残表示限度時間の範囲外で信号灯色が切り替わるという事態を防ぎ、運転者が混乱することを防止することができる。また、一旦決定された信号灯器の現在ステップにおける残表示限度時間の範囲内であれば残表示限度時間が変化しても運転者が混乱することもない。
【0030】
第4発明にあっては、第1判定部で(今回の)表示時間情報が正しいと判定した場合、記憶した表示時間情報を正しいと判定した表示時間情報で更新する。例えば、先後の表示時間情報に矛盾がなく、表示時間情報が正しいと判定した場合には、該表示時間情報で先の表示時間情報を更新する。これにより、交通状況等に応じて表示時間情報を繰返し生成する場合でも、演算部が正常であるときに生成した最新の表示時間情報を保持することができる。
【0031】
第5発明にあっては、第1判定部で(今回の)表示時間情報が正しいと判定した場合、該表示時間情報を含む所定の信号情報を外部へ送信する。これにより、交通状況等に応じて表示時間情報を繰返し生成する場合でも、演算部が正常であるときに生成した表示時間情報を含む最新の信号情報を車両等に提供することができる。
【0032】
第6発明にあっては、送信部は、第1判定部で(今回の)表示時間情報が誤りと判定した場合、信号情報の送信を停止する。これにより、演算部が異常になった場合に、信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供されることを防止することができ、異常時においても動作を保証することができる。
【0033】
第7発明にあっては、第1判定部で(今回の)表示時間情報が誤りと判定した場合、該表示時間情報を無効にする。これにより、演算部が異常になった場合に、誤った表示時間情報が用いられることを防止することができ、異常時においても動作を保証することができる。
【0034】
第8発明にあっては、灯色制御部は、第1判定部で判定した判定結果を演算部へ出力し、演算部は、判定結果に応じて、所定の信号情報を外部へ出力するか否かを決定する。これにより、演算部が誤った表示時間情報を生成した場合でも、信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供されることを防止することができ、異常時においても動作を保証することができる。
【0035】
第9発明にあっては、灯色制御部は、第2判定部で判定した結果に応じて、信号灯器の灯色を制御する。例えば、現在ステップにおける残り表示時間内(下限時間と上限時間の範囲内)に演算部から歩進指令が出力された場合に、その歩進指令は正常(すなわち、演算部は正常)であると判定できたときは、演算部で生成した表示時間情報や歩進指令を採用する。また、現在ステップにおける残り表示時間外に歩進指令が出力された場合(例えば、下限時間よりも短い時間内に歩進指令が出力された場合)、あるいは上限時間を過ぎても歩進指令が出力されない場合に、歩進指令は異常(すなわち、演算部は異常)であると判定できたときは、演算部で生成した表示時間情報や歩進指令を採用しない。これにより、演算部が異常になった場合でも、動作を保証することができる。
【0036】
第10発明にあっては、演算部は、プログラムコードにより動作を決定するように構成してあり、灯色制御部は、ハードウエア回路自体の構成により動作を決定するように構成してある。演算部は、例えば、CPU(中央処理演算装置)とCPUで実行されるプログラムコードを備え、プログラムコードの各コマンド(命令)をCPUで順次解釈し実行することにより、プログラムコードで定められた処理手順に従った演算処理を行う。また、灯色制御部は、例えば、ゲートアレイやLUTで構成されるFPGA(Field Programmable Gate Array)、PLD(Programmable Logic Device)、あるいはASIC(Application Specific Integrated Circuit)などを備え、コマンドを順次解釈して実行するものではなく、予め定められた論理回路構成により所定の演算処理を行う。演算部が正常であるか異常であるかを、ハードウエア回路で構成される灯色制御部が判定する構成としているので、演算部の正常、異常を正確に検知することができ、装置の動作保証を確実にして信頼性を高めることができる。
【0037】
第11発明にあっては、演算部には、オペレーティングシステム(OS)を搭載してある。OSを搭載することで、複雑で高度なアプリケーションをマルチタスク環境で容易に構築可能であり、地点感応制御や需要予測制御など制御方式を高度化したソフトウエアに柔軟に対応することができる。例えば、OSを搭載したマルチタスク環境のアプリケーションソフトウエアの場合には、処理の順番や処理時間に揺らぎやバラツキが発生するケースがあり、本来処理されるべき時間内に処理が間に合わない、あるいは通常よりも早く処理が終了するといったケースや、想定されている順番とは異なる順番で処理が行われることで通常とは少し異なる処理結果となるケースがあり得る。また、ソフトウエアの場合には、装置の設置後に、ソフトウエアの機能追加や変更を行った上で、当該修正ソフトウエアを装置に再インストールするというケースも多く、容易に更新を行うことができる反面、追加・変更等した機能によって、設置した当初に期待された動作とは異なる動作となってしまうこともあり得る。したがって、信号情報のように装置外部に正しい情報を正しいタイミングで出力することについての必要性が高い情報については、その内容の正確性を担保するための仕組みをハードウエア(灯色制御部)に持たせることが好ましい。なお、このような仕組みをソフトウエアで実現することも可能であり、その場合には、情報内容のチェックを、通常の処理を行うタスクよりも優先順位の高いタスクで行ったり、割り込み処理などで行ったりすることが好ましい。また、ソフトウエアとハードウエアの双方でダブルチェックする仕組みを採用してもよい。
【0038】
第12発明にあっては、演算部は、信号灯色の表示時間情報を生成し、生成した表示時間情報を外部へ送信する。表示時間情報(例えば、歩進予定情報)は、例えば、信号灯器の現在ステップにおける残り表示時間及び将来ステップにおける表示時間を含み、表示時間は、下限時間と上限時間の2つの時間からなる範囲で表現することができる。灯色制御部の判定部は、演算部が生成した表示時間情報に基づいて、演算部からの歩進指令の正誤を判定し、判定した結果に応じて、信号灯色の灯色を制御する。例えば、現在ステップにおける残り表示時間内(下限時間と上限時間の範囲内)に演算部から歩進指令が出力された場合には、その歩進指令は正常(すなわち、演算部は正常)であると判定することができ、灯色制御部は、歩進指令に基づいて信号灯器の灯色を制御する。また、現在ステップにおける残り表示時間外に歩進指令が出力された場合(例えば、下限時間よりも短い時間内に歩進指令が出力された場合)、あるいは上限時間を過ぎても歩進指令が出力されない場合には、演算部は異常であると判定することができ、灯色制御部は、歩進指令を採用しない。これにより、演算部による誤った動作を防止することができ、異常時においても動作を保証することができる。
【発明の効果】
【0039】
本発明によれば、演算部による誤った動作を防止することができ、異常時においても動作を保証することができる。
【図面の簡単な説明】
【0040】
【図1】本発明に係る交通信号制御機を備えた路車協調システムの構成の一例を示す模式図である。
【図2】本発明に係る交通信号制御機の構成の一例を示すブロック図である。
【図3】信号灯器が設置された交差点の模式図である。
【図4】現示データメモリの内容の一例を示す説明図である。
【図5】歩進予定情報の一例を示す説明図である。
【図6】先の(5秒前)の歩進予定情報を示す説明図である。
【図7】現時点の内部情報を示す説明図である。
【図8】再度生成された歩進予定情報を示す説明図である。
【図9】更新後の内部情報を示す説明図である。
【図10】タイマ値と歩進指令の状態を示す説明図である。
【図11】CPUの処理手順の一例を示すフローチャートである。
【図12】CPUの処理手順の他の例を示すフローチャートである。
【図13】灯色制御回路の歩進予定情報の判定処理手順の一例を示すフローチャートである。
【図14】灯色制御回路の歩進処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0041】
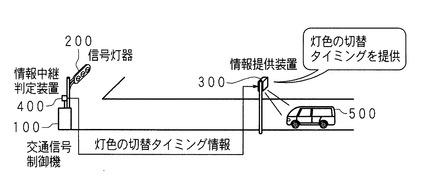
以下、本発明をその実施の形態を示す図面に基づいて説明する。図1は本発明に係る交通信号制御機100を備えた路車協調システムの構成の一例を示す模式図である。図1に示すように、交通信号制御機100は、交差点に設置された信号灯器200の灯色を制御する。この場合、交通信号制御機100は、交差点の上流側に設置された感知器(不図示)等で感知した車両の交通量などの交通状況に応じて、信号灯器200の灯色の切替タイミングを調整する。そして、交通信号制御機100は、信号灯器200の灯色の切替タイミング情報(信号情報)を、例えば、毎秒、あるいは数秒経過の都度、情報中継判定装置400を介して情報提供装置300へ出力(送信)する。情報提供装置300は、交通信号制御機100から出力された切替タイミング情報(信号情報)を、所定時間の経過の都度(例えば、100m秒など)車両500へ送信する。これにより、車両500は、取得した信号情報に基づいて自動走行制御を行うことができ、あるいは取得した信号情報を表示して運転者に提供することができる。
【0042】
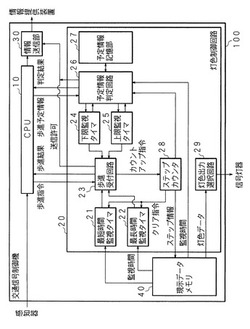
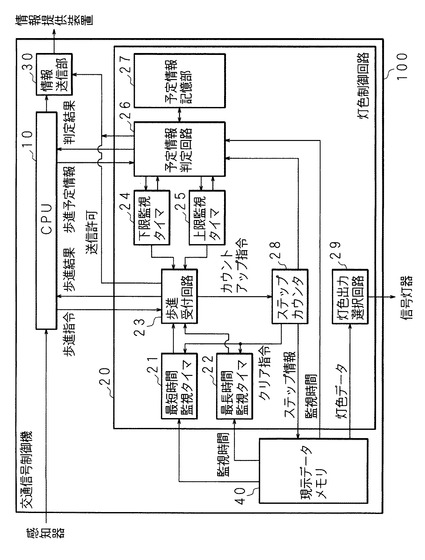
図2は本発明に係る交通信号制御機100の構成の一例を示すブロック図である。図2に示すように、交通信号制御機100は、演算部としてのCPU10、灯色制御部としての灯色制御回路20、送信部としての情報送信部30、現示データメモリ40などを備えている。
【0043】
CPU10は、交通信号制御機100全体の制御を行うものであり、プログラムコードにより動作を決定するように構成してある。すなわち、CPU10は、CPU10で実行されるプログラムコードを備え、プログラムコードの各コマンド(命令)をCPU10で順次解釈し実行することにより、プログラムコードで定められた処理手順に従った演算処理を行う。また、CPU10には、オペレーティングシステムを搭載してあってもよく、この場合には、CPU10での演算処理は、基本プログラムであるオペレーティングシステム(OS)とアプリケーションプログラムとから構成されるソフトウエアによる処理で実現される。
【0044】
CPU10は、歩進指令を灯色制御回路20へ出力する。歩進指令は、信号灯色の表示ステップを次のステップに進めるための指令である。また、CPU10は、歩進予定情報(信号灯色の表示時間情報)を繰返し(例えば、毎秒、数秒経過の都度など)生成して灯色制御回路20へ出力する。歩進予定情報は、例えば、信号灯器200の現在ステップにおける残り表示時間及び将来ステップにおける表示時間である。表示時間は、下限時間と上限時間の2つの時間からなる範囲で表現される。
【0045】
灯色制御回路20は、ハードウエア回路自体の構成により動作を決定するように構成してある。すなわち、灯色制御回路20は、例えば、ゲートアレイやLUTで構成されるFPGA(Field Programmable Gate Array)、PLD(Programmable Logic Device)、あるいはASIC(Application Specific Integrated Circuit)などを備え、コマンドを順次解釈して実行するものではなく、予め定められた論理回路構成により所定の演算処理を行う。
【0046】
灯色制御回路20は、最短時間監視タイマ21、最長時間監視タイマ22、第2判定部としての歩進受付回路23、下限監視タイマ24、上限監視タイマ25、第1判定部、更新部、無効部としての予定情報判定回路26、予定情報記憶部27、ステップカウンタ28、灯色出力選択回路29などを備えている。
【0047】
歩進受付回路23は、後述する予定情報判定回路26での判定結果により下限監視タイマ24及び上限監視タイマ25にセットされた下限時間及び上限時間を用いて、CPU10からの歩進指令の正誤を判定する。すなわち、歩進受付回路23は、CPU10からの歩進指令を受け付けて、ステップカウンタ28へカウントアップ指令を出力する。ただし、歩進受付回路23は、最短時間監視タイマ21からの最短時間監視中信号、あるいは下限監視タイマ24からの下限監視中信号が入力されている場合には、CPU10からの歩進指令は無視する。
【0048】
また、歩進受付回路23は、最長時間監視タイマ22からのタイムアウト信号、あるいは上限監視タイマ25からの上限タイムアウト信号を受け取った場合、CPU10からの歩進指令がない場合でも、ステップカウンタ28へカウントアップ指令を送信する。
【0049】
ステップカウンタ28は、動作ステップを計数(カウント)する。すなわち、ステップカウンタ28は、歩進受付回路23からのカウントアップ指令により、カウントを進める。信号灯色のステップの最終ステップでカウントアップ指令を受付けた場合、ステップカウンタ28は、ステップを最初のステップ1に戻す。また、ステップカウンタ28は、カウントを変更した場合、タイマの初期化(再計時)指令を最長時間監視タイマ22及び最短時間監視タイマ21へ出力する。
【0050】
最短時間監視タイマ21は、ステップカウンタ28が変化してからの時間を計時する。最短時間監視タイマ21は、計時時間が最短監視時間内である場合、最短時間監視中信号を歩進受付回路23へ出力する。また、最短時間監視タイマ21は、計時時間が最短監視時間を過ぎた場合、最短時間監視中信号の出力を停止する。
【0051】
最長時間監視タイマ22は、ステップカウンタ28が変化してからの時間を計時する。最長時間監視タイマ22は、計時時間が最長監視時間を過ぎた場合、タイムアウト信号を歩進受付回路23へ出力する。
【0052】
現示データメモリ40は、ステップ毎の灯色点灯情報と監視時間情報(例えば、最短監視時間、最長監視時間など)を記憶している。ステップカウンタ28から入力されるステップ情報に基づいて、対応する灯色点灯情報が灯色出力選択回路29へ出力され、また、最短監視時間が最短時間監視タイマ21へ出力され、最長監視時間が最長時間監視タイマ22へ出力される。
【0053】
灯色出力選択回路29は、灯色点灯情報に基づいて点灯指令又は滅灯指令を信号灯器200へ出力する。
【0054】
予定情報判定回路26は、CPU10から歩進予定情報(表示時間情報)を受け取る。歩進予定情報は、例えば、信号灯器200の現在ステップにおける残り表示時間及び将来ステップにおける表示時間であり、表示時間は、下限時間と上限時間の2つの時間からなる時間範囲で表現することができる。
【0055】
予定情報判定回路26は、CPU10が生成した先後の表示時間情報(すなわち、歩進予定情報)同士の正誤を判定する。ここで、先後は、過去と現在を示す。例えば、予定情報判定回路26は、先に(過去に)取得した歩進予定情報と後に(今回)取得した歩進予定情報との間で矛盾がないかどうか(例えば、後に取得した歩進予定情報の表示時間の時間範囲が、先に取得した歩進予定情報の表示時間の時間範囲よりも広がっていないかどうか)を判定する。
【0056】
予定情報判定回路26は、両者に矛盾がない場合(すなわち、後の歩進予定情報が正しい場合)には、歩進予定情報を予定情報記憶部27に記憶するととともに、現在ステップ残り時間の下限時間を下限監視タイマ24にセットし、現在ステップ残り時間の上限時間を上限監視タイマ25にセットする。
【0057】
両方の歩進予定情報に矛盾がある場合(すなわち、後の歩進予定情報が誤っている場合)には、CPU10に何らかの異常が発生したことを検知することができる。予定情報判定回路26は、判定結果(すなわち、矛盾の有無)をCPU10へ出力する。
【0058】
予定情報判定回路26は、判定結果(すなわち、矛盾の有無)に基づいて、送信許可信号を情報送信部30へ出力する。すなわち、予定情報判定回路26は、先後の歩進予定情報に矛盾がない(正しい)場合のみ、情報送信部30が信号情報を情報提供装置へ送信することを許可する送信許可を出力する。
【0059】
予定情報記憶部27は、CPU10から取得した歩進予定情報を記憶している。
【0060】
下限監視タイマ24は、タイマに下限時間がセットされた場合、セットされた時間からカウントダウン計時する。計時時間がゼロより大きい場合は、下限監視中信号を歩進受付回路23へ出力する。
【0061】
上限監視タイマ25は、タイマに上限時間がセットされた場合、セットされた時間からカウントダウン計時する。計時時間がゼロになった場合、上限タイムアウト信号を歩進受付回路23へ出力する。
【0062】
情報送信部30は、歩進受付回路23、予定情報判定回路26からの送信許可が入力されている場合に、CPU10からの信号情報(例えば、信号灯器200の灯色の切替タイミング情報)を情報提供装置へ送信する。
【0063】
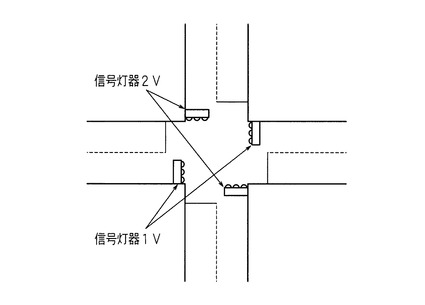
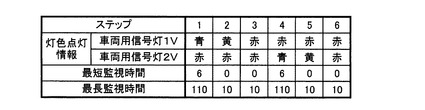
次に、本発明に係る交通信号制御機100の動作について説明する。図3は信号灯器200が設置された交差点の模式図であり、図4は現示データメモリ40の内容の一例を示す説明図である。図4に示すように、現示データメモリ40には、車両用信号灯1V(例えば、主方向)及び車両用信号灯2V(例えば、交差方向)における灯色点灯情報、監視時間(最短監視時間、最長監視時間)などがステップ毎に記憶されている。なお、歩行者用信号灯の灯色点灯情報を含めることもできる。
【0064】
ステップカウンタ28は、動作ステップをカウントしており、動作ステップが1の場合は、現示データメモリのステップ1の灯色点灯情報(図4の例では、信号灯1Vを青点灯、信号灯2Vを赤点灯)が灯色出力選択回路29へ出力され、灯色出力選択回路29からの指令により対応する信号灯1Vは青点灯、信号灯2Vは赤点灯を行う。
【0065】
ステップカウンタ28は、CPU10からの歩進指令が歩進受付回路23に入力され、歩進受付回路23からステップカウンタ28へカウントアップ指令が出力されることにより、カウントアップされる。動作ステップが1の場合は、ステップ1が始まってから最短監視時間(図4の例では6秒)〜最長監視時間(図4の例では110秒)の時間範囲内に、CPU10からの歩進指令を歩進受付回路23が取得すると、ステップカウンタ28は、ステップ2にカウントアップされる。
【0066】
ステップ2になった場合、現示データメモリ40はステップ2の灯色点灯情報(図4の例では、信号灯1Vを黄点灯、信号灯2Vを赤点灯) が灯色出力選択回路29へ出力され、灯色出力選択回路29からの指令により対応する信号灯1Vは黄点灯、信号灯2Vは赤点灯となる。
【0067】
なお、歩進受付回路23は、最短監視時間以内に入力された歩進指令は、CPU10に何らかの異常が発生したものとして、歩進指令を無視する。また、歩進受付回路23は、最長監視時間になってもCPU10から歩進指令が入力されない場合は、CPU10に何らかの異常が発生したものとして、歩進受付回路23が自らカウントアップ指令をステップカウンタ28へ出力する。
【0068】
次に、歩進予定情報の更新動作について説明する。CPU10は、感知器(不図示)等から得られる交通状況をもとに、歩進予定情報を繰返し生成し、生成した歩進予定情報を予定情報判定回路26へ出力する。
【0069】
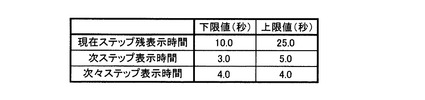
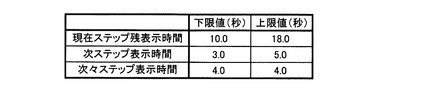
図5は歩進予定情報の一例を示す説明図である。図5に示すように、歩進予定情報(信号灯色の表示時間情報)は、現在ステップの残表示時間の下限値及び上限値、次ステップの表示時間の下限値及び上限値、次々ステップの表示時間の下限値及び上限値などの情報を含んでいる。なお、図5の例では、次々ステップまでの表示時間情報しか例示していないが、次々ステップよりも後のステップを含めることもできる。
【0070】
図5の例は、現在表示中のステップから次のステップへと歩進するタイミングが10.0秒〜25.0秒の範囲であることを示している。さらに、次ステップの表示時間が3.0秒〜5.0秒の範囲であること、次々ステップの表示時間が4.0秒〜4.0秒の範囲(すなわち、4.0秒)であることを示している。なお、下限値と上限値が一致している場合は、歩進タイミングが確定していることを示す。
【0071】
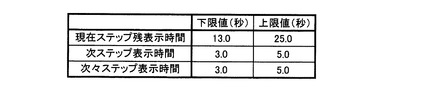
また、予定情報判定回路26は、先の歩進予定情報を、現時点から遡って5秒前に取得し、内部情報を更新していたとする。図6は先の(5秒前)の歩進予定情報を示す説明図である。5秒前の内部情報の更新の際に、予定情報判定回路26は、下限監視タイマ24に現在ステップ残表示時間の下限値である13.0秒をセットし、上限監視タイマ25に現在ステップ残表示時間の上限値である25.0秒をセットしている。
【0072】
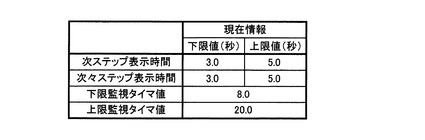
図7は現時点の内部情報を示す説明図である。内部情報が5秒前に更新され、その時点から現時点まで5秒経過しているので、下限監視タイマ24のタイマ値は、5秒前にセットされた13.0秒から経過時間である5秒を減算した8.0秒になっている。また、上限監視タイマ25のタイマ値は、5秒前にセットされた25.0秒から経過時間である5秒を減算した20.0秒になっている。
【0073】
予定情報判定回路26は、現時点(後)で取得した歩進予定情報(図5の例)と、前回(先に)取得して先後の時間差(例えば、5秒)に応じて更新された歩進予定情報(図7の例)との間に矛盾がないかを判定する。現在ステップの残表示時間が矛盾しない(正しい)ための判定条件は、現在ステップ残表示時間の範囲が、前回取得した歩進予定情報の現在ステップ残表示時間の下限値及び上限値から経過秒数を減算した値、つまり、現在内部情報の下限監視タイマ値〜上限監視タイマ値の範囲内であることである。
【0074】
すなわち、現在ステップ残表示時間が正しい(矛盾しない)と判定することができるためには、以下の判定式を満足する必要がある。
【0075】
下限監視タイマ値≦取得した現在ステップ残表示時間下限値≦取得した現在ステップ残表示上限値≦上限監視タイマ値…(式1)
【0076】
図5、図7の例を式(1)に当てはめると、下限監視タイマ値が8.0秒、取得した現在ステップ残表示時間下限値が10.0秒、取得した現在ステップ残表示上限値が25.0秒、上限監視タイマ値が20.0秒となり、現在ステップ残表示時間の上限値が上限監視タイマ値以下という関係を満たさないため、今回取得した歩進予定情報は、前回取得した歩進予定情報と矛盾があることになる。
【0077】
この場合、予定情報判定回路26は、CPU10に異常が発生したと判定し、CPU10に対して、歩進予定情報を受け付けることができないことを示す「受付不可」(判定結果)出力するとともに、現在ステップ残表示時間の上限値が異常であること(判定結果)を出力する。また、予定情報判定回路26は、今回取得した歩進予定情報を破棄して採用しないようにする。
【0078】
CPU10は、「受付不可」であることを予定情報判定回路26から取得した場合、生成した歩進予定情報を破棄し、今回生成した歩進予定情報は使用せずに前回生成した歩進予定情報に基づいて、信号情報を生成し、生成した信号情報を情報送信部30へ出力する。また、CPU10は、「受付不可」であった理由(上述の例では、現在ステップ残表示時間の上限値が異常)を解消すべく、再度、歩進予定情報を生成して予定情報判定回路26へ出力する。なお、異常時の再度の歩進予定情報の生成は、正常時の歩進予定情報の生成タイミング(例えば、毎秒、数秒)に比べて短い時間(例えば、数十m秒など)の間に行われる。
【0079】
図8は再度生成された歩進予定情報を示す説明図である。CPU10は、今回生成した歩進予定情報が受付不可であった場合、再度、図8に示す歩進予定情報を生成して予定情報判定回路26へ出力する。
【0080】
予定情報判定回路26は、図7、図8の例を式(1)に当てはめて、再度生成された歩進予定情報に矛盾がないか判定する。図7、図8の例を式(1)に当てはめると、下限監視タイマ値が8.0秒、取得した現在ステップ残表示時間下限値が10.0秒、取得した現在ステップ残表示上限値が18.0秒、上限監視タイマ値が20.0秒となり、式(1)を満たすことがわかる。
【0081】
続いて、予定情報判定回路26は、次ステップ表示時間と次々ステップ表示時間の判定を順に行う。これらの表示時間については、前回取得した歩進予定情報に矛盾しないためには、以下の判定条件としての式(2)を満足する必要がある。
【0082】
予定情報記憶部27の下限値≦取得した表示時間の下限値≦取得した表示時間の上限値≦予定情報記憶部27の上限値…(2)
【0083】
図7及び図8の例を式(2)に当てはめると、次ステップ表示時間については、予定情報記憶部27の下限値が3.0秒、取得した次ステップ表示時間の下限値が3.0秒、取得した次ステップ表示時間の上限値が5.0秒、予定情報記憶部27の上限値が5.0秒となり、式(2)を満たすことがわかる。
【0084】
また、次々ステップ表示時間については、予定情報記憶部27の下限値が3.0秒、取得した次ステップ表示時間の下限値が4.0秒、取得した次ステップ表示時間の上限値が4.0秒、予定情報記憶部27の上限値が5.0秒となり、式(2)を満たすことがわかる。
【0085】
以上の判定結果により、今回取得した歩進予定情報は前回取得した歩進予定情報に矛盾しないものであると判定することができ、CPU10が異常状態から正常状態に復帰したことを検知できたので、予定情報判定回路26は、CPU10に対して、「受付完了」を送信するとともに、前回(先)に取得していた歩進予定情報を今回(後に)取得した歩進予定情報に更新することにより内部情報の更新を行う。
【0086】
内部情報の更新としては、下限監視タイマ24の値を現在ステップ残表示時間の下限値(図8の例では、10.0)に更新し、上限監視タイマ25の値を現在ステップ残表示時間の上限値(図8の例では、18.0秒)に更新し、予定情報記憶部27の次ステップ表示時間及び次々ステップ表示時間の下限値及び上限値を、今回取得した歩進予定情報の次ステップ表示時間及び次々ステップ表示時間の下限値及び上限値に更新する。
【0087】
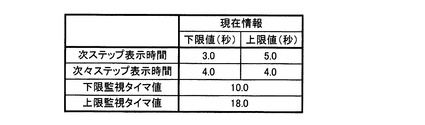
図9は更新後の内部情報を示す説明図である。更新後の内部情報は、予定情報記憶部27に記憶される。図9に示すように、内部情報は、今回取得した歩進予定情報(図8)の内容で更新されている。
【0088】
次に、歩進動作について説明する。下限監視タイマ24と上限監視タイマ25は、歩進予定情報取得時に現在ステップ残表示時間の下限時間及び上限時間がセットされた後、時間経過とともにカウントダウンされる。
【0089】
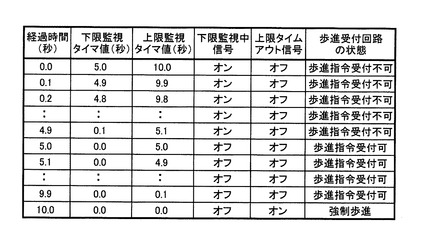
図10はタイマ値と歩進指令の状態を示す説明図である。図10の例では、下限監視タイマ24にタイマ値として5.0秒がセットされ、上限監視タイマ25にタイマ値として10.0秒がセットされた場合を示す。なお、セットされるタイマ値は一例であって、これに限定されるものではない。そして、図10に示すように、時間経過(図10の例では0.1秒経過の都度の状況を例示している)に応じて、タイマ値が変化する。
【0090】
下限監視タイマ24は、タイマ値が0.0秒より大きい場合に、下限監視中信号をオンとし、タイマ値が0.0秒になると下限監視中信号をオフとする。
【0091】
また、上限監視タイマ25は、タイマ値が0.0秒より大きい場合に、上限タイムアウト信号をオフとし、タイマ値が0.0秒になると上限タイムアウト信号をオンとする。
【0092】
下限監視中信号と上限タイムアウト信号は、歩進受付回路23へ出力されている。歩進受付回路23は、下限監視中信号、上限タイムアウト信号、最短時間監視タイマ21から入力される最短時間監視中信号、及び最長時間監視タイマ22から入力されるタイムアウト信号を用いて、CPU10からの歩進指令の正誤を判定して受付処理を行う。
【0093】
歩進受付回路23は、CPU10からの歩進指令を取得した場合に、最短時間監視中信号がオフであり、かつ下限監視中信号がオフ(下限監視タイマ値=0)のときには、CPU10は正常であるとして、歩進指令を受け付ける。この時、歩進受付回路23は、ステップカウンタ28を一つ進めるとともに、内部情報を更新する。
【0094】
この場合、内部情報の更新は、以下の通り行う。すなわち、歩進予定情報の次ステップ表示時間下限値を下限監視タイマ値とし、歩進予定情報の次ステップ表示時間上限値を上限監視タイマ値とする。また、次々ステップ表示時間下限値を次ステップ表示時間下限値とし、次々ステップ表示時間上限値を次ステップ表示時間上限値とする。また、次々の次のステップの表示時間下限値を次々ステップ表示時間下限値とし、次々の次のステップの表示時間上限値を次々ステップ表示時間上限値とする。なお、予定情報記憶部27に次々ステップ表示時間まで記憶しているが、これに限定されるものではない。
【0095】
歩進受付回路23は、CPU10からの歩進指令を取得した場合に、最短時間監視中信号がオン、または下限監視中信号がオン(下限監視タイマ値>0)であるときには、情報提供装置へ提供した歩進予定情報の残表示時間の範囲外のタイミングで歩進指令が入力されたということで、CPU10に何らかの異常が発生したものと判定し、歩進指令を無視し(採用しない)、歩進不可信号をCPU10及び情報送信部30へ出力する。
【0096】
情報送信部30は、歩進不可信号を取得した場合、CPU10が誤ったタイミングで歩進指令を出力したことから、提供する信号情報に含まれる信号灯色の切替タイミングと実際に灯色制御される切替タイミングとが矛盾することがないように、信号情報の送信を停止する。なお、情報送信部30の信号情報の送信停止は、歩進受付回路23が、CPU10から正しい歩進指令が出力された時点で解除され、信号情報の送信が再開される。
【0097】
また、歩進受付回路23は、CPU10からの歩進指令が入力されないまま最長時間監視タイムアウト信号がオンになった場合、あるいは、上限タイムアウト信号がオン(上限監視タイマ値=0)となった場合には、提供した歩進予定情報の上限値に達したので、CPU10に何らかの異常が発生したものと判定し、強制的に歩進処理を行う。歩進受付回路23は、この場合、ステップカウンタ28を一つ進めて内部情報の更新を行う。
【0098】
以上の仕組みにより、歩進予定情報の現在ステップ残表示時間の下限値から上限値の範囲内で歩進させることを保証することができる。
【0099】
また、CPU10が異常であると判定した場合に、CPU10で生成した歩進予定情報や歩進指令を採用しないようにし、CPU10が正常であるときの歩進予定情報や歩進指令を採用すれば、CPU10による誤った動作を防止することができ、異常時においても動作を保証することができ、信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供されることを防止することができる。また、CPU10の異常をハードウエア回路で構成された灯色制御回路20で判定する構成としているので、CPU10の正常、異常を正確に検知することができ、装置の動作保証を確実にして信頼性を高めることができる。
【0100】
また、CPU10にオペレーティングシステムを搭載している場合には、複雑で高度なアプリケーションをマルチタスク環境で容易に構築可能であり、地点感応制御や需要予測制御など制御方式を高度化したソフトウエアに柔軟に対応することができる。例えば、OSを搭載したマルチタスク環境のアプリケーションソフトウエアの場合には、処理の順番や処理時間に揺らぎやバラツキが発生するケースがあり、本来処理されるべき時間内に処理が間に合わない、あるいは通常よりも早く処理が終了するといったケースや、想定されている順番とは異なる順番で処理が行われることで通常とは少し異なる処理結果となるケースがあり得る。また、ソフトウエアの場合には、装置の設置後に、ソフトウエアの機能追加や変更を行った上で、当該修正ソフトウエアを装置に再インストールするというケースも多く、容易に更新を行うことができる反面、追加・変更等した機能によって、設置した当初に期待された動作とは異なる動作となってしまうこともあり得る。したがって、信号情報のように装置外部に正しい情報を正しいタイミングで出力することについての必要性が高い情報については、その内容の正確性を担保するための仕組みをハードウエア(灯色制御部)に持たせることが好ましい。なお、このような仕組みをソフトウエアで実現することも可能であり、その場合には、情報内容のチェックを、通常の処理を行うタスクよりも優先順位の高いタスクで行ったり、割り込み処理などで行ったりすることが好ましい。また、ソフトウエアとハードウエアの双方でダブルチェックする仕組みを採用してもよい。
【0101】
また、信号灯色の切り替わりタイミングが交通状況等により変更になる場合でも、先の決定された歩進予定情報の時間範囲を越えないように後の歩進予定情報を決定することができるので、一旦決定された表示時間範囲外で信号灯色が切り替わるという事態を防ぎ、運転者や車両に不測の事態を発生させることも防止することができる。また、一旦決定された表示時間範囲内であれば限度時間が変化しても不測の事態を発生させることもない。
【0102】
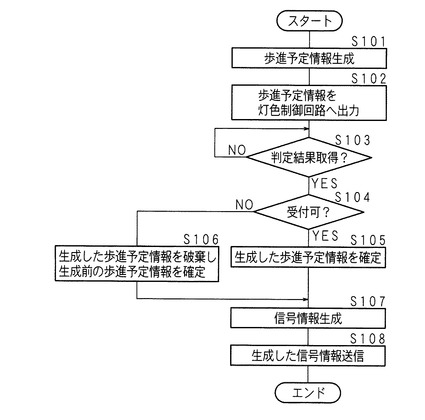
図11はCPU10の処理手順の一例を示すフローチャートである。CPU10は、歩進予定情報を生成し(S101)、生成した歩進予定情報を灯色制御回路20へ出力する(S102)。CPU10は、灯色制御回路20から歩進予定情報の判定結果を取得したか否かを判定し(S103)、取得していない場合(S103でNO)、ステップS103の処理を続ける。
【0103】
灯色制御回路20から歩進予定情報の判定結果を取得した場合(S103でYES)、CPU10は、受付可であるか否かを判定し(S104)、受付可の場合(S104でYES)、生成した歩進予定情報を確定する(S105)。受付不可の場合(S104でNO)、CPU10は、生成した歩進予定情報を破棄し生成前(前回)の歩進予定情報を確定する(S106)。歩進予定情報を確定することにより、CPU10が正常なときに生成した歩進予定情報を採用することができる。
【0104】
CPU10は、確定した歩進予定情報に基づいて信号情報を生成し(S107)、生成した信号情報を情報提供装置へ送信し(S108)、処理を終了する。なお、上述の処理は、繰返し行うことができる。
【0105】
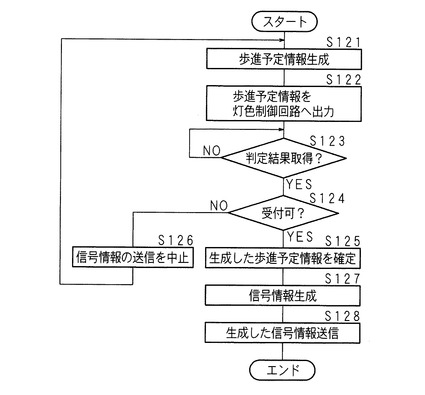
図12はCPU10の処理手順の他の例を示すフローチャートである。図11の処理との違いは、生成した歩進予定情報が誤っていた場合に、信号情報の送信を中止して再度歩進予定情報を生成する点である。
【0106】
CPU10は、歩進予定情報を生成し(S121)、生成した歩進予定情報を灯色制御回路20へ出力する(S122)。CPU10は、灯色制御回路20から歩進予定情報の判定結果を取得したか否かを判定し(S123)、取得していない場合(S123でNO)、ステップS123の処理を続ける。
【0107】
灯色制御回路20から歩進予定情報の判定結果を取得した場合(S123でYES)、CPU10は、受付可であるか否かを判定し(S124)、受付可の場合(S124でYES)、生成した歩進予定情報を確定する(S125)。受付不可の場合(S124でNO)、CPU10は、信号情報の送信を中止し(S126)、ステップS121以降の処理を続ける。
【0108】
CPU10は、確定した歩進予定情報に基づいて信号情報を生成し(S127)、生成した信号情報を情報提供装置へ送信し(S128)、処理を終了する。なお、上述の処理は、繰返し行うことができる。
【0109】
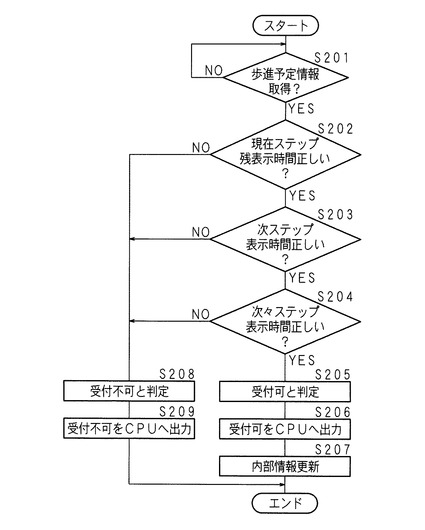
図13は灯色制御回路20の歩進予定情報の判定処理手順の一例を示すフローチャートである。灯色制御回路20は、CPU10から歩進予定情報を取得したか否かを判定し(S201)、取得していない場合(S201でNO)、ステップS201の処理を続ける。CPU10から歩進予定情報を取得した場合(S201でYES)、灯色制御回路20は、現在ステップの残表示時間が正しいか否かを判定する(S202)。
【0110】
現在ステップの残表示時間が正しい場合(S202でYES)、灯色制御回路20は、次ステップの表示時間が正しいか否かを判定し(S203)、次ステップの表示時間が正しい場合(S203でYES)、次々ステップの表示時間が正しいか否かを判定する(S204)。
【0111】
次々ステップの表示時間が正しい場合(S204でYES)、灯色制御回路20は、歩進予定情報に矛盾がなく、CPU10は正常であると判定して、受付可と判定し(S205)、受付可であることをCPU10へ出力する(S206)。灯色制御回路20は、内部情報を更新し(S207)、処理を終了する。
【0112】
現在ステップの残表示時間が正しくない場合(S202でNO)、次ステップの表示時間が正しくない場合(S203でNO)、あるいは次々ステップの表示時間が正しくない場合(S204でNO)、灯色制御回路20は、歩進予定情報に矛盾があり、CPU10は異常であると判定して、受付不可と判定する(S208)。灯色制御回路20は、受付不可であることをCPU10へ出力し(S209)、処理を終了する。
【0113】
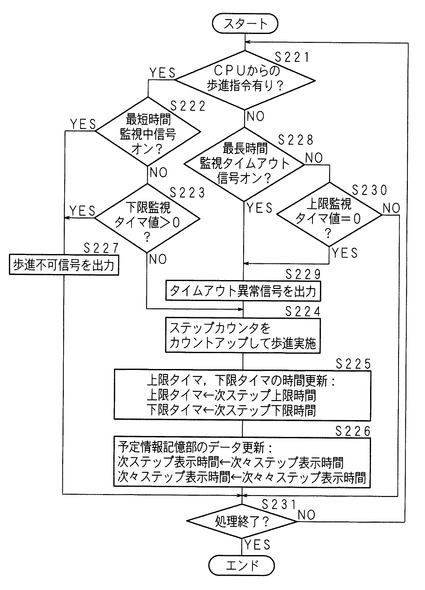
図14は灯色制御回路20の歩進処理手順の一例を示すフローチャートである。灯色制御回路20は、CPU10から歩進指令の有無を判定し(S221)、歩進指令があった場合(S221でYES)、最短時間監視中信号がオンであるか否かを判定する(S222)。最短時間監視中信号がオフである場合(S222でNO)、灯色制御回路20は、最短時間監視タイマ21による監視時間は終了(歩進指令は一応有効)したとして、下限監視タイマ24の下限値が0より大きいか否かを判定する(S223)。
【0114】
下限監視タイマ24のタイマ値が0より大きくない場合(S223でNO)、灯色制御回路20は、下限監視タイマ24による監視時間は終了(歩進指令は有効)したとして、ステップカウンタ28をカウントアップして歩進を実施する(S224)。
【0115】
灯色制御回路20は、上限監視タイマ25のタイマ値を次ステップ上限時間で、下限監視タイマ24のタイマ値を次ステップ下限時間で更新し(S225)、予定情報記憶部27の次ステップ表示時間を次々ステップ表示時間で、次々ステップ表示時間を次々々ステップ表示時間で更新する(S226)。
【0116】
最短時間監視中信号がオンである場合(S222でYES)、あるいは、下限監視タイマ24のタイマ値が0より大きい場合(S223でYES)、灯色制御回路20は、歩進不可信号をCPU10へ出力する(S227)。
【0117】
CPU10から歩進指令がない場合(S221でNO)、灯色制御回路20は、最長時間監視タイムアウト信号がオンであるか否かを判定し(S228)、最長時間監視タイムアウト信号がオンである場合(S228でYES)、タイムアウト異常信号を出力し(S229)、ステップS224以降の処理を行う。
【0118】
最長時間監視タイムアウト信号がオフである場合(S228でNO)、灯色制御回路20は、上限監視タイマ25のタイマ値が0であるか否かを判定し(S230)、タイマ値が0である場合(S230でYES)、ステップS229以降の処理を続け、タイマ値が0でない場合(S230でNO)、後述のステップS231の処理を行う。
【0119】
灯色制御回路20は、処理を終了させるか否かを判定し(S231)、処理を終了させない場合(S231でNO)、ステップS221以降の処理を続け、処理を終了させる場合(S231でYES)、処理を終了する。
【0120】
なお、上述の処理においては、次々ステップの表示時間の下限値及び上限値の初期値が、該当ステップの最短監視時間及び最長監視時間になるので、最短時間監視中信号による判定処理と最長時間監視タイムアウト信号による判定処理は省略してもよい。
【0121】
以上説明したように、本発明によれば、ハードウエア回路自体で構成される灯色制御回路20がCPU10の異常を判定することができ、CPU10の異常時には、CPU10により生成された歩進予定情報や歩進指令を採用しないようにすることができるので、交通信号制御機全体としての動作を保証することができる。特に、CPU10が決定した信号灯器200の灯色の切替タイミングの情報(信号情報)が情報提供装置へ提供された後に、CPU10の異常により歩進予定情報が変化した場合でも、これを検知して、車両等へ提供した灯色の切替タイミングと矛盾するタイミング(一旦決定した表示時間の上限・下限の時間範囲外となるようなタイミング)で信号灯器200の灯色を変化させることを防止することができる。
【0122】
上述の実施の形態において、CPU10が歩進タイミング確定の時点で必ず上限値と下限値とが等しい歩進予定情報を出力する場合には、歩進指令は必ずしも必要ではなく、CPU10からの歩進指令の出力を省略した構成とすることができる。また、表示時間の残時間が0となった時点での歩進予定信号を歩進指令としてもよい。
【0123】
また、歩進予定情報がCPU10から出力されていない場合には、現示データの監視時間で判定処理を行ってもよい。また、歩進処理にてタイムアウトが発生した場合、あるいは、歩進予定情報の判定で誤りがあると判定された場合に、情報送信部30への送信許可をオフにする構成とするとともに、歩進予定情報が正しいと判定された場合に送信許可をオンにする構成とすることができる。
【0124】
上述の実施の形態においては、灯器制御回路20で情報を提供するか否かの判定処理を行う構成であったが、情報提供装置で行ってもよい。
【0125】
以上に開示された実施の形態及び実施例は、全ての点で例示であって制限的なものではないと考慮されるべきである。本発明の範囲は、以上の実施の形態及び実施例ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての修正や変形を含むものと意図される。
【符号の説明】
【0126】
10 CPU(演算部)
20 灯色制御回路(灯色制御部)
21 最短時間監視タイマ
22 最長時間監視タイマ
23 歩進受付回路(第2判定部)
24 下限監視タイマ
25 上限監視タイマ
26 予定情報判定回路(第1判定部、更新部、無効部)
27 予定情報記憶部(記憶部)
28 ステップカウンタ
29 灯色出力選択回路
30 情報送信部(送信部)
40 現示データメモリ
【技術分野】
【0001】
本発明は、交通信号制御機及び交通信号制御機の異常判定方法に関する。
【背景技術】
【0002】
交通事故抑止又は円滑な交通のために、道路上を走行する車両に対して信号情報などの交通情報を提供する路車協調システムに関する技術開発が行われている。例えば、車両に正確な信号情報を提供するために、路上装置に信号情報を送信した後、その路上装置が車両に信号情報を送信するまでの通信所要時間を算出しておき、信号情報をその通信所要時間に基づいて補正して路上装置へ送信する路上通信システムが開示されている(特許文献1参照)。
【0003】
また、信号機の作動情報を受信し、交差点を安全に走行するための速度や、交差点で停止するための速度などの走行条件を算出して車両の安全走行を実現することができる信号機連動式車両速度制御装置が開示されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−152680号公報
【特許文献2】特許第2806801号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のような路車協調システムでは、信号機が設置された交差点と車両に信号情報を提供する地点との間は、車両に余裕をもって信号情報を提供する必要性から、所要の距離が設定されている。このため、車両に信号情報を提供してから実際に車両が交差点を通過するまでの間に、道路状況や車両の走行状態などに応じた時間を要する。車両が信号情報を受信してから交差点を通過するまでの間に、信号機の動作(例えば、信号灯の点灯変化タイミング)が変更された場合、車両には結果として信号灯器の実際の表示とは変化タイミングが異なる信号情報(変更前の信号情報)が送信されたことになる。
【0006】
このような場合、信号灯器の実際の表示とは変化タイミングが異なる信号情報に基づいて車両の走行状態を制御するような自動制御運転が行われている車両と、信号情報の提供を受けずに自動制御運転が行われていない車両との間では、信号情報(例えば、信号機の点灯変化タイミング)が異なる事態が発生する。このため、両方の車両が異なる信号情報に基づいて走行することになり、運転者が運転中に混乱する可能性がある。
【0007】
また、カーナビゲーション装置等で信号機の点灯変化タイミングを表示するようなシステムでは、信号灯器の実際の表示とは変化タイミングが異なる信号情報に基づいて信号機の点灯変化タイミングを表示した場合、運転者がカーナビゲーション装置を見て判断する点灯変化タイミングと、実際の信号灯の変化タイミングとが異なるため、運転者の注意がそがれる場合や思いがけない走行(急減速や急加速など)を行わなければならない場合が生じる。
【0008】
信号機の動作が変更される場合としては、例えば、信号機の動作を制御しているCPUが何らかの原因で異常となったときがあり、このような場合に信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供される可能性が高い。従って、このような異常が発生した場合でも、信号機の動作を保証することが望まれていた。
【0009】
本発明は、斯かる事情に鑑みてなされたものであり、異常時においても動作を保証することができる交通信号制御機及び交通信号制御機の異常判定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
第1発明に係る交通信号制御機は、演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、前記演算部は、信号灯色の表示時間情報を繰返し生成するようにしてあり、前記灯色制御部は、前記演算部が生成した先後の表示時間情報同士の正誤を判定する第1判定部と、該第1判定部で判定した判定結果に基づいて、前記演算部からの歩進指令の正誤を判定する第2判定部とを備えることを特徴とする。
【0011】
第2発明に係る交通信号制御機は、第1発明において、前記表示時間情報は、信号灯色の表示限度時間を含み、前記第1判定部は、表示時間情報の表示限度時間が、先の表示時間情報の表示限度時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする。
【0012】
第3発明に係る交通信号制御機は、第1発明又は第2発明において、前記表示時間情報は、信号灯色の残表示限度時間を含み、前記第1判定部は、表示時間情報の残表示限度時間が、先の表示時間情報の残表示限度時間から前記先後の時間差を減算した時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする。
【0013】
第4発明に係る交通信号制御機は、第1発明乃至第3発明のいずれか1つにおいて、前記表示時間情報を記憶する記憶部と、前記第1判定部で表示時間情報が正しいと判定した場合、記憶した表示時間情報を正しいと判定した表示時間情報で更新する更新部とを備えることを特徴とする。
【0014】
第5発明に係る交通信号制御機は、第1発明乃至第4発明のいずれか1つにおいて、前記第1判定部で表示時間情報が正しいと判定した場合、該表示時間情報を含む所定の信号情報を外部へ送信する送信部を備えることを特徴とする。
【0015】
第6発明に係る交通信号制御機は、第5発明において、前記送信部は、前記第1判定部で表示時間情報が誤りと判定した場合、前記信号情報の送信を停止するように構成してあることを特徴とする。
【0016】
第7発明に係る交通信号制御機は、第1発明乃至第6発明のいずれか1つにおいて、前記第1判定部で表示時間情報が誤りと判定した場合、該表示時間情報を無効にする無効部を備えることを特徴とする。
【0017】
第8発明に係る交通信号制御機は、第1発明乃至第4発明のいずれか1つにおいて、前記灯色制御部は、前記第1判定部で判定した判定結果を前記演算部へ出力するように構成してあり、前記演算部は、前記判定結果に応じて、所定の信号情報を外部へ出力するか否かを決定するように構成してあることを特徴とする。
【0018】
第9発明に係る交通信号制御機は、第1発明乃至第8発明のいずれか1つにおいて、前記灯色制御部は、前記第2判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする。
【0019】
第10発明に係る交通信号制御機は、第1発明乃至第9発明のいずれか1つにおいて、前記演算部は、プログラムコードにより動作を決定するように構成してあり、前記灯色制御部は、ハードウエア回路自体の構成により動作を決定するように構成してあることを特徴とする。
【0020】
第11発明に係る交通信号制御機は、第10発明において、前記演算部には、オペレーティングシステムを搭載してあることを特徴とする。
【0021】
第12発明に係る交通信号制御機は、演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、前記演算部は、信号灯色の表示時間情報を生成するようにしてあり、前記演算部で生成した表示時間情報を外部へ送信する送信部を備え、前記灯色制御部は、前記演算部が生成した表示時間情報に基づいて、前記演算部からの歩進指令の正誤を判定する判定部を備え、該判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする。
【0022】
第13発明に係る交通信号制御機の異常判定方法は、演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部を備える交通信号制御機の異常判定方法において、信号灯色の表示時間情報を前記演算部により繰返し生成し、前記灯色制御部は、生成された先後の表示時間情報同士の正誤を第1判定部により判定し、判定された判定結果に基づいて、前記演算部からの歩進指令の正誤を第2判定部により判定することを特徴とする。
【0023】
第1発明及び第13発明にあっては、演算部(例えば、CPU)は、信号灯色の表示時間情報を繰返し(例えば、毎秒、数秒経過の都度など)生成する。表示時間情報(例えば、歩進予定情報)は、例えば、信号灯器の現在ステップにおける残り表示時間及び将来ステップにおける表示時間を含み、表示時間は、下限時間と上限時間の2つの時間からなる範囲で表現することができる。灯色制御部の第1判定部は、演算部が生成した先後の表示時間情報同士の正誤を判定する。例えば、先に(以前に)取得した表示時間情報と後に(今回)取得した表示時間情報との間で表示時間に矛盾がないかどうかを判定する。両方の表示時間情報に矛盾がある場合には、演算部に何らかの異常が発生したことを検知することができる。
【0024】
灯色制御部の第2判定部は、第1判定部で判定した判定結果に基づいて、演算部からの歩進指令の正誤を判定する。なお、歩進指令は、信号灯色の表示ステップを次のステップに進めるための指令である。第1判定部で表示時間情報に矛盾がなく正しいと判定した場合には、後の表示時間情報に基づいて歩進指令の正誤を判定する。例えば、現在ステップにおける残り表示時間内(下限時間と上限時間の範囲内)に演算部から歩進指令が出力された場合には、その歩進指令は正常(すなわち、演算部は正常)であると判定することができ、また、現在ステップにおける残り表示時間外に歩進指令が出力された場合(例えば、下限時間よりも短い時間内に歩進指令が出力された場合)、あるいは上限時間を過ぎても歩進指令が出力されない場合には、演算部は異常であると判定することができる。演算部が異常であると判定した場合に、演算部で生成した表示時間情報や歩進指令を採用しないようにし、演算部が正常であったときの表示時間情報を採用すれば、演算部による誤った動作を防止することができ、異常時においても動作を保証することができる。また、演算部の異常を灯色制御部が判定する構成としているので、演算部の正常、異常を正確に検知することができる。
【0025】
第2発明にあっては、表示時間情報は、信号灯色の表示限度時間を含み、第1判定部は、表示時間情報の表示限度時間が、先の表示時間情報の表示限度時間に含まれるか又は一致する場合、表示時間情報が正しいと判定する。表示限度時間は、例えば、信号灯器の現在ステップにおける残り表示時間及び将来ステップにおける表示時間であり、下限時間と上限時間の2つの時間からなる範囲で表現することができる。なお、下限時間と上限時間が同じ時間であってもよい。例えば、先の(以前に取得した)表示限度時間が3秒以上5秒以下である場合に、今回取得した(後の)表示限度時間が3秒以上4秒以下であれば、表示限度時間が先の表示限度時間に含まれるので、両者の表示時間情報に矛盾がないと判定することができる。また、先の(以前に取得した)表示限度時間が3秒以上5秒以下である場合に、今回取得した(後の)表示限度時間が3秒以上6秒以下であれば、表示限度時間が先の表示限度時間に含まれないので、両者の表示時間情報に矛盾があると判定することができ、演算部に異常があることを検知することができる。
【0026】
これにより、信号灯色の切り替わりタイミングが交通状況等により変更になる場合でも、過去に決定された表示限度時間の範囲を越えないように表示限度時間を決定することができるので、一旦決定された表示限度時間の範囲外で信号灯色が切り替わるという事態を防ぎ、運転者が混乱することを防止することができる。また、一旦決定された表示限度時間の範囲内であれば限度時間が変化しても運転者が混乱することもない。
【0027】
第3発明にあっては、表示時間情報は、残表示限度時間を含み、第1判定部は、今回取得した(後の)表示時間情報の残表示限度時間が、先の表示時間情報の残表示限度時間から先後の時間差(先の表示時間情報と後の表示時間情報との時間差)を減算した時間に含まれるか又は一致する場合、表示時間情報が正しいと判定する。現在表示中の信号灯色の残表示限度時間は、信号灯器の現在ステップにおける残り表示時間であり、下限時間と上限時間の2つの時間からなる範囲で表現することができる。なお、下限時間と上限時間が同じ時間であってもよい。例えば、先の(以前に取得した)残表示限度時間が13秒以上25秒以下である場合に、先の表示時間情報の5秒後に(今回の)表示時間情報が生成(又は取得)されたときは、先の表示時間情報の残表示限度時間から先後の時間差を減算した時間は、8(=13−5)秒以上20(=25−5)秒以下となる。そして、(今回取得した残表示限度時間が10秒以上20秒以下であれば、残表示限度時間が、先の残表示限度時間から先後の時間差を減算した時間に含まれるので、両者の表示時間情報に矛盾がないと判定することができる。
【0028】
また、先の(以前に取得した)残表示限度時間が13秒以上25秒以下である場合に、先の表示時間情報の5秒後に(今回の)表示時間情報が生成(又は取得)されたときは、先の表示時間情報の残表示限度時間から先後の時間差を減算した時間は、8(=13−5)秒以上20(=25−5)秒以下となる。そして、(今回取得した)残表示限度時間が10秒以上25秒以下であれば、残表示限度時間が、先の残表示限度時間から先後の時間差を減算した時間に含まれないので、両者の表示時間情報に矛盾があり、演算部に異常があることを検知することができる。
【0029】
これにより、信号灯色の切り替わりタイミングが交通状況等により変更になる場合でも、過去に決定された残表示限度時間の範囲を越えないように残表示限度時間を決定することができるので、一旦決定された信号灯器の現在ステップにおける残表示限度時間の範囲外で信号灯色が切り替わるという事態を防ぎ、運転者が混乱することを防止することができる。また、一旦決定された信号灯器の現在ステップにおける残表示限度時間の範囲内であれば残表示限度時間が変化しても運転者が混乱することもない。
【0030】
第4発明にあっては、第1判定部で(今回の)表示時間情報が正しいと判定した場合、記憶した表示時間情報を正しいと判定した表示時間情報で更新する。例えば、先後の表示時間情報に矛盾がなく、表示時間情報が正しいと判定した場合には、該表示時間情報で先の表示時間情報を更新する。これにより、交通状況等に応じて表示時間情報を繰返し生成する場合でも、演算部が正常であるときに生成した最新の表示時間情報を保持することができる。
【0031】
第5発明にあっては、第1判定部で(今回の)表示時間情報が正しいと判定した場合、該表示時間情報を含む所定の信号情報を外部へ送信する。これにより、交通状況等に応じて表示時間情報を繰返し生成する場合でも、演算部が正常であるときに生成した表示時間情報を含む最新の信号情報を車両等に提供することができる。
【0032】
第6発明にあっては、送信部は、第1判定部で(今回の)表示時間情報が誤りと判定した場合、信号情報の送信を停止する。これにより、演算部が異常になった場合に、信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供されることを防止することができ、異常時においても動作を保証することができる。
【0033】
第7発明にあっては、第1判定部で(今回の)表示時間情報が誤りと判定した場合、該表示時間情報を無効にする。これにより、演算部が異常になった場合に、誤った表示時間情報が用いられることを防止することができ、異常時においても動作を保証することができる。
【0034】
第8発明にあっては、灯色制御部は、第1判定部で判定した判定結果を演算部へ出力し、演算部は、判定結果に応じて、所定の信号情報を外部へ出力するか否かを決定する。これにより、演算部が誤った表示時間情報を生成した場合でも、信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供されることを防止することができ、異常時においても動作を保証することができる。
【0035】
第9発明にあっては、灯色制御部は、第2判定部で判定した結果に応じて、信号灯器の灯色を制御する。例えば、現在ステップにおける残り表示時間内(下限時間と上限時間の範囲内)に演算部から歩進指令が出力された場合に、その歩進指令は正常(すなわち、演算部は正常)であると判定できたときは、演算部で生成した表示時間情報や歩進指令を採用する。また、現在ステップにおける残り表示時間外に歩進指令が出力された場合(例えば、下限時間よりも短い時間内に歩進指令が出力された場合)、あるいは上限時間を過ぎても歩進指令が出力されない場合に、歩進指令は異常(すなわち、演算部は異常)であると判定できたときは、演算部で生成した表示時間情報や歩進指令を採用しない。これにより、演算部が異常になった場合でも、動作を保証することができる。
【0036】
第10発明にあっては、演算部は、プログラムコードにより動作を決定するように構成してあり、灯色制御部は、ハードウエア回路自体の構成により動作を決定するように構成してある。演算部は、例えば、CPU(中央処理演算装置)とCPUで実行されるプログラムコードを備え、プログラムコードの各コマンド(命令)をCPUで順次解釈し実行することにより、プログラムコードで定められた処理手順に従った演算処理を行う。また、灯色制御部は、例えば、ゲートアレイやLUTで構成されるFPGA(Field Programmable Gate Array)、PLD(Programmable Logic Device)、あるいはASIC(Application Specific Integrated Circuit)などを備え、コマンドを順次解釈して実行するものではなく、予め定められた論理回路構成により所定の演算処理を行う。演算部が正常であるか異常であるかを、ハードウエア回路で構成される灯色制御部が判定する構成としているので、演算部の正常、異常を正確に検知することができ、装置の動作保証を確実にして信頼性を高めることができる。
【0037】
第11発明にあっては、演算部には、オペレーティングシステム(OS)を搭載してある。OSを搭載することで、複雑で高度なアプリケーションをマルチタスク環境で容易に構築可能であり、地点感応制御や需要予測制御など制御方式を高度化したソフトウエアに柔軟に対応することができる。例えば、OSを搭載したマルチタスク環境のアプリケーションソフトウエアの場合には、処理の順番や処理時間に揺らぎやバラツキが発生するケースがあり、本来処理されるべき時間内に処理が間に合わない、あるいは通常よりも早く処理が終了するといったケースや、想定されている順番とは異なる順番で処理が行われることで通常とは少し異なる処理結果となるケースがあり得る。また、ソフトウエアの場合には、装置の設置後に、ソフトウエアの機能追加や変更を行った上で、当該修正ソフトウエアを装置に再インストールするというケースも多く、容易に更新を行うことができる反面、追加・変更等した機能によって、設置した当初に期待された動作とは異なる動作となってしまうこともあり得る。したがって、信号情報のように装置外部に正しい情報を正しいタイミングで出力することについての必要性が高い情報については、その内容の正確性を担保するための仕組みをハードウエア(灯色制御部)に持たせることが好ましい。なお、このような仕組みをソフトウエアで実現することも可能であり、その場合には、情報内容のチェックを、通常の処理を行うタスクよりも優先順位の高いタスクで行ったり、割り込み処理などで行ったりすることが好ましい。また、ソフトウエアとハードウエアの双方でダブルチェックする仕組みを採用してもよい。
【0038】
第12発明にあっては、演算部は、信号灯色の表示時間情報を生成し、生成した表示時間情報を外部へ送信する。表示時間情報(例えば、歩進予定情報)は、例えば、信号灯器の現在ステップにおける残り表示時間及び将来ステップにおける表示時間を含み、表示時間は、下限時間と上限時間の2つの時間からなる範囲で表現することができる。灯色制御部の判定部は、演算部が生成した表示時間情報に基づいて、演算部からの歩進指令の正誤を判定し、判定した結果に応じて、信号灯色の灯色を制御する。例えば、現在ステップにおける残り表示時間内(下限時間と上限時間の範囲内)に演算部から歩進指令が出力された場合には、その歩進指令は正常(すなわち、演算部は正常)であると判定することができ、灯色制御部は、歩進指令に基づいて信号灯器の灯色を制御する。また、現在ステップにおける残り表示時間外に歩進指令が出力された場合(例えば、下限時間よりも短い時間内に歩進指令が出力された場合)、あるいは上限時間を過ぎても歩進指令が出力されない場合には、演算部は異常であると判定することができ、灯色制御部は、歩進指令を採用しない。これにより、演算部による誤った動作を防止することができ、異常時においても動作を保証することができる。
【発明の効果】
【0039】
本発明によれば、演算部による誤った動作を防止することができ、異常時においても動作を保証することができる。
【図面の簡単な説明】
【0040】
【図1】本発明に係る交通信号制御機を備えた路車協調システムの構成の一例を示す模式図である。
【図2】本発明に係る交通信号制御機の構成の一例を示すブロック図である。
【図3】信号灯器が設置された交差点の模式図である。
【図4】現示データメモリの内容の一例を示す説明図である。
【図5】歩進予定情報の一例を示す説明図である。
【図6】先の(5秒前)の歩進予定情報を示す説明図である。
【図7】現時点の内部情報を示す説明図である。
【図8】再度生成された歩進予定情報を示す説明図である。
【図9】更新後の内部情報を示す説明図である。
【図10】タイマ値と歩進指令の状態を示す説明図である。
【図11】CPUの処理手順の一例を示すフローチャートである。
【図12】CPUの処理手順の他の例を示すフローチャートである。
【図13】灯色制御回路の歩進予定情報の判定処理手順の一例を示すフローチャートである。
【図14】灯色制御回路の歩進処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0041】
以下、本発明をその実施の形態を示す図面に基づいて説明する。図1は本発明に係る交通信号制御機100を備えた路車協調システムの構成の一例を示す模式図である。図1に示すように、交通信号制御機100は、交差点に設置された信号灯器200の灯色を制御する。この場合、交通信号制御機100は、交差点の上流側に設置された感知器(不図示)等で感知した車両の交通量などの交通状況に応じて、信号灯器200の灯色の切替タイミングを調整する。そして、交通信号制御機100は、信号灯器200の灯色の切替タイミング情報(信号情報)を、例えば、毎秒、あるいは数秒経過の都度、情報中継判定装置400を介して情報提供装置300へ出力(送信)する。情報提供装置300は、交通信号制御機100から出力された切替タイミング情報(信号情報)を、所定時間の経過の都度(例えば、100m秒など)車両500へ送信する。これにより、車両500は、取得した信号情報に基づいて自動走行制御を行うことができ、あるいは取得した信号情報を表示して運転者に提供することができる。
【0042】
図2は本発明に係る交通信号制御機100の構成の一例を示すブロック図である。図2に示すように、交通信号制御機100は、演算部としてのCPU10、灯色制御部としての灯色制御回路20、送信部としての情報送信部30、現示データメモリ40などを備えている。
【0043】
CPU10は、交通信号制御機100全体の制御を行うものであり、プログラムコードにより動作を決定するように構成してある。すなわち、CPU10は、CPU10で実行されるプログラムコードを備え、プログラムコードの各コマンド(命令)をCPU10で順次解釈し実行することにより、プログラムコードで定められた処理手順に従った演算処理を行う。また、CPU10には、オペレーティングシステムを搭載してあってもよく、この場合には、CPU10での演算処理は、基本プログラムであるオペレーティングシステム(OS)とアプリケーションプログラムとから構成されるソフトウエアによる処理で実現される。
【0044】
CPU10は、歩進指令を灯色制御回路20へ出力する。歩進指令は、信号灯色の表示ステップを次のステップに進めるための指令である。また、CPU10は、歩進予定情報(信号灯色の表示時間情報)を繰返し(例えば、毎秒、数秒経過の都度など)生成して灯色制御回路20へ出力する。歩進予定情報は、例えば、信号灯器200の現在ステップにおける残り表示時間及び将来ステップにおける表示時間である。表示時間は、下限時間と上限時間の2つの時間からなる範囲で表現される。
【0045】
灯色制御回路20は、ハードウエア回路自体の構成により動作を決定するように構成してある。すなわち、灯色制御回路20は、例えば、ゲートアレイやLUTで構成されるFPGA(Field Programmable Gate Array)、PLD(Programmable Logic Device)、あるいはASIC(Application Specific Integrated Circuit)などを備え、コマンドを順次解釈して実行するものではなく、予め定められた論理回路構成により所定の演算処理を行う。
【0046】
灯色制御回路20は、最短時間監視タイマ21、最長時間監視タイマ22、第2判定部としての歩進受付回路23、下限監視タイマ24、上限監視タイマ25、第1判定部、更新部、無効部としての予定情報判定回路26、予定情報記憶部27、ステップカウンタ28、灯色出力選択回路29などを備えている。
【0047】
歩進受付回路23は、後述する予定情報判定回路26での判定結果により下限監視タイマ24及び上限監視タイマ25にセットされた下限時間及び上限時間を用いて、CPU10からの歩進指令の正誤を判定する。すなわち、歩進受付回路23は、CPU10からの歩進指令を受け付けて、ステップカウンタ28へカウントアップ指令を出力する。ただし、歩進受付回路23は、最短時間監視タイマ21からの最短時間監視中信号、あるいは下限監視タイマ24からの下限監視中信号が入力されている場合には、CPU10からの歩進指令は無視する。
【0048】
また、歩進受付回路23は、最長時間監視タイマ22からのタイムアウト信号、あるいは上限監視タイマ25からの上限タイムアウト信号を受け取った場合、CPU10からの歩進指令がない場合でも、ステップカウンタ28へカウントアップ指令を送信する。
【0049】
ステップカウンタ28は、動作ステップを計数(カウント)する。すなわち、ステップカウンタ28は、歩進受付回路23からのカウントアップ指令により、カウントを進める。信号灯色のステップの最終ステップでカウントアップ指令を受付けた場合、ステップカウンタ28は、ステップを最初のステップ1に戻す。また、ステップカウンタ28は、カウントを変更した場合、タイマの初期化(再計時)指令を最長時間監視タイマ22及び最短時間監視タイマ21へ出力する。
【0050】
最短時間監視タイマ21は、ステップカウンタ28が変化してからの時間を計時する。最短時間監視タイマ21は、計時時間が最短監視時間内である場合、最短時間監視中信号を歩進受付回路23へ出力する。また、最短時間監視タイマ21は、計時時間が最短監視時間を過ぎた場合、最短時間監視中信号の出力を停止する。
【0051】
最長時間監視タイマ22は、ステップカウンタ28が変化してからの時間を計時する。最長時間監視タイマ22は、計時時間が最長監視時間を過ぎた場合、タイムアウト信号を歩進受付回路23へ出力する。
【0052】
現示データメモリ40は、ステップ毎の灯色点灯情報と監視時間情報(例えば、最短監視時間、最長監視時間など)を記憶している。ステップカウンタ28から入力されるステップ情報に基づいて、対応する灯色点灯情報が灯色出力選択回路29へ出力され、また、最短監視時間が最短時間監視タイマ21へ出力され、最長監視時間が最長時間監視タイマ22へ出力される。
【0053】
灯色出力選択回路29は、灯色点灯情報に基づいて点灯指令又は滅灯指令を信号灯器200へ出力する。
【0054】
予定情報判定回路26は、CPU10から歩進予定情報(表示時間情報)を受け取る。歩進予定情報は、例えば、信号灯器200の現在ステップにおける残り表示時間及び将来ステップにおける表示時間であり、表示時間は、下限時間と上限時間の2つの時間からなる時間範囲で表現することができる。
【0055】
予定情報判定回路26は、CPU10が生成した先後の表示時間情報(すなわち、歩進予定情報)同士の正誤を判定する。ここで、先後は、過去と現在を示す。例えば、予定情報判定回路26は、先に(過去に)取得した歩進予定情報と後に(今回)取得した歩進予定情報との間で矛盾がないかどうか(例えば、後に取得した歩進予定情報の表示時間の時間範囲が、先に取得した歩進予定情報の表示時間の時間範囲よりも広がっていないかどうか)を判定する。
【0056】
予定情報判定回路26は、両者に矛盾がない場合(すなわち、後の歩進予定情報が正しい場合)には、歩進予定情報を予定情報記憶部27に記憶するととともに、現在ステップ残り時間の下限時間を下限監視タイマ24にセットし、現在ステップ残り時間の上限時間を上限監視タイマ25にセットする。
【0057】
両方の歩進予定情報に矛盾がある場合(すなわち、後の歩進予定情報が誤っている場合)には、CPU10に何らかの異常が発生したことを検知することができる。予定情報判定回路26は、判定結果(すなわち、矛盾の有無)をCPU10へ出力する。
【0058】
予定情報判定回路26は、判定結果(すなわち、矛盾の有無)に基づいて、送信許可信号を情報送信部30へ出力する。すなわち、予定情報判定回路26は、先後の歩進予定情報に矛盾がない(正しい)場合のみ、情報送信部30が信号情報を情報提供装置へ送信することを許可する送信許可を出力する。
【0059】
予定情報記憶部27は、CPU10から取得した歩進予定情報を記憶している。
【0060】
下限監視タイマ24は、タイマに下限時間がセットされた場合、セットされた時間からカウントダウン計時する。計時時間がゼロより大きい場合は、下限監視中信号を歩進受付回路23へ出力する。
【0061】
上限監視タイマ25は、タイマに上限時間がセットされた場合、セットされた時間からカウントダウン計時する。計時時間がゼロになった場合、上限タイムアウト信号を歩進受付回路23へ出力する。
【0062】
情報送信部30は、歩進受付回路23、予定情報判定回路26からの送信許可が入力されている場合に、CPU10からの信号情報(例えば、信号灯器200の灯色の切替タイミング情報)を情報提供装置へ送信する。
【0063】
次に、本発明に係る交通信号制御機100の動作について説明する。図3は信号灯器200が設置された交差点の模式図であり、図4は現示データメモリ40の内容の一例を示す説明図である。図4に示すように、現示データメモリ40には、車両用信号灯1V(例えば、主方向)及び車両用信号灯2V(例えば、交差方向)における灯色点灯情報、監視時間(最短監視時間、最長監視時間)などがステップ毎に記憶されている。なお、歩行者用信号灯の灯色点灯情報を含めることもできる。
【0064】
ステップカウンタ28は、動作ステップをカウントしており、動作ステップが1の場合は、現示データメモリのステップ1の灯色点灯情報(図4の例では、信号灯1Vを青点灯、信号灯2Vを赤点灯)が灯色出力選択回路29へ出力され、灯色出力選択回路29からの指令により対応する信号灯1Vは青点灯、信号灯2Vは赤点灯を行う。
【0065】
ステップカウンタ28は、CPU10からの歩進指令が歩進受付回路23に入力され、歩進受付回路23からステップカウンタ28へカウントアップ指令が出力されることにより、カウントアップされる。動作ステップが1の場合は、ステップ1が始まってから最短監視時間(図4の例では6秒)〜最長監視時間(図4の例では110秒)の時間範囲内に、CPU10からの歩進指令を歩進受付回路23が取得すると、ステップカウンタ28は、ステップ2にカウントアップされる。
【0066】
ステップ2になった場合、現示データメモリ40はステップ2の灯色点灯情報(図4の例では、信号灯1Vを黄点灯、信号灯2Vを赤点灯) が灯色出力選択回路29へ出力され、灯色出力選択回路29からの指令により対応する信号灯1Vは黄点灯、信号灯2Vは赤点灯となる。
【0067】
なお、歩進受付回路23は、最短監視時間以内に入力された歩進指令は、CPU10に何らかの異常が発生したものとして、歩進指令を無視する。また、歩進受付回路23は、最長監視時間になってもCPU10から歩進指令が入力されない場合は、CPU10に何らかの異常が発生したものとして、歩進受付回路23が自らカウントアップ指令をステップカウンタ28へ出力する。
【0068】
次に、歩進予定情報の更新動作について説明する。CPU10は、感知器(不図示)等から得られる交通状況をもとに、歩進予定情報を繰返し生成し、生成した歩進予定情報を予定情報判定回路26へ出力する。
【0069】
図5は歩進予定情報の一例を示す説明図である。図5に示すように、歩進予定情報(信号灯色の表示時間情報)は、現在ステップの残表示時間の下限値及び上限値、次ステップの表示時間の下限値及び上限値、次々ステップの表示時間の下限値及び上限値などの情報を含んでいる。なお、図5の例では、次々ステップまでの表示時間情報しか例示していないが、次々ステップよりも後のステップを含めることもできる。
【0070】
図5の例は、現在表示中のステップから次のステップへと歩進するタイミングが10.0秒〜25.0秒の範囲であることを示している。さらに、次ステップの表示時間が3.0秒〜5.0秒の範囲であること、次々ステップの表示時間が4.0秒〜4.0秒の範囲(すなわち、4.0秒)であることを示している。なお、下限値と上限値が一致している場合は、歩進タイミングが確定していることを示す。
【0071】
また、予定情報判定回路26は、先の歩進予定情報を、現時点から遡って5秒前に取得し、内部情報を更新していたとする。図6は先の(5秒前)の歩進予定情報を示す説明図である。5秒前の内部情報の更新の際に、予定情報判定回路26は、下限監視タイマ24に現在ステップ残表示時間の下限値である13.0秒をセットし、上限監視タイマ25に現在ステップ残表示時間の上限値である25.0秒をセットしている。
【0072】
図7は現時点の内部情報を示す説明図である。内部情報が5秒前に更新され、その時点から現時点まで5秒経過しているので、下限監視タイマ24のタイマ値は、5秒前にセットされた13.0秒から経過時間である5秒を減算した8.0秒になっている。また、上限監視タイマ25のタイマ値は、5秒前にセットされた25.0秒から経過時間である5秒を減算した20.0秒になっている。
【0073】
予定情報判定回路26は、現時点(後)で取得した歩進予定情報(図5の例)と、前回(先に)取得して先後の時間差(例えば、5秒)に応じて更新された歩進予定情報(図7の例)との間に矛盾がないかを判定する。現在ステップの残表示時間が矛盾しない(正しい)ための判定条件は、現在ステップ残表示時間の範囲が、前回取得した歩進予定情報の現在ステップ残表示時間の下限値及び上限値から経過秒数を減算した値、つまり、現在内部情報の下限監視タイマ値〜上限監視タイマ値の範囲内であることである。
【0074】
すなわち、現在ステップ残表示時間が正しい(矛盾しない)と判定することができるためには、以下の判定式を満足する必要がある。
【0075】
下限監視タイマ値≦取得した現在ステップ残表示時間下限値≦取得した現在ステップ残表示上限値≦上限監視タイマ値…(式1)
【0076】
図5、図7の例を式(1)に当てはめると、下限監視タイマ値が8.0秒、取得した現在ステップ残表示時間下限値が10.0秒、取得した現在ステップ残表示上限値が25.0秒、上限監視タイマ値が20.0秒となり、現在ステップ残表示時間の上限値が上限監視タイマ値以下という関係を満たさないため、今回取得した歩進予定情報は、前回取得した歩進予定情報と矛盾があることになる。
【0077】
この場合、予定情報判定回路26は、CPU10に異常が発生したと判定し、CPU10に対して、歩進予定情報を受け付けることができないことを示す「受付不可」(判定結果)出力するとともに、現在ステップ残表示時間の上限値が異常であること(判定結果)を出力する。また、予定情報判定回路26は、今回取得した歩進予定情報を破棄して採用しないようにする。
【0078】
CPU10は、「受付不可」であることを予定情報判定回路26から取得した場合、生成した歩進予定情報を破棄し、今回生成した歩進予定情報は使用せずに前回生成した歩進予定情報に基づいて、信号情報を生成し、生成した信号情報を情報送信部30へ出力する。また、CPU10は、「受付不可」であった理由(上述の例では、現在ステップ残表示時間の上限値が異常)を解消すべく、再度、歩進予定情報を生成して予定情報判定回路26へ出力する。なお、異常時の再度の歩進予定情報の生成は、正常時の歩進予定情報の生成タイミング(例えば、毎秒、数秒)に比べて短い時間(例えば、数十m秒など)の間に行われる。
【0079】
図8は再度生成された歩進予定情報を示す説明図である。CPU10は、今回生成した歩進予定情報が受付不可であった場合、再度、図8に示す歩進予定情報を生成して予定情報判定回路26へ出力する。
【0080】
予定情報判定回路26は、図7、図8の例を式(1)に当てはめて、再度生成された歩進予定情報に矛盾がないか判定する。図7、図8の例を式(1)に当てはめると、下限監視タイマ値が8.0秒、取得した現在ステップ残表示時間下限値が10.0秒、取得した現在ステップ残表示上限値が18.0秒、上限監視タイマ値が20.0秒となり、式(1)を満たすことがわかる。
【0081】
続いて、予定情報判定回路26は、次ステップ表示時間と次々ステップ表示時間の判定を順に行う。これらの表示時間については、前回取得した歩進予定情報に矛盾しないためには、以下の判定条件としての式(2)を満足する必要がある。
【0082】
予定情報記憶部27の下限値≦取得した表示時間の下限値≦取得した表示時間の上限値≦予定情報記憶部27の上限値…(2)
【0083】
図7及び図8の例を式(2)に当てはめると、次ステップ表示時間については、予定情報記憶部27の下限値が3.0秒、取得した次ステップ表示時間の下限値が3.0秒、取得した次ステップ表示時間の上限値が5.0秒、予定情報記憶部27の上限値が5.0秒となり、式(2)を満たすことがわかる。
【0084】
また、次々ステップ表示時間については、予定情報記憶部27の下限値が3.0秒、取得した次ステップ表示時間の下限値が4.0秒、取得した次ステップ表示時間の上限値が4.0秒、予定情報記憶部27の上限値が5.0秒となり、式(2)を満たすことがわかる。
【0085】
以上の判定結果により、今回取得した歩進予定情報は前回取得した歩進予定情報に矛盾しないものであると判定することができ、CPU10が異常状態から正常状態に復帰したことを検知できたので、予定情報判定回路26は、CPU10に対して、「受付完了」を送信するとともに、前回(先)に取得していた歩進予定情報を今回(後に)取得した歩進予定情報に更新することにより内部情報の更新を行う。
【0086】
内部情報の更新としては、下限監視タイマ24の値を現在ステップ残表示時間の下限値(図8の例では、10.0)に更新し、上限監視タイマ25の値を現在ステップ残表示時間の上限値(図8の例では、18.0秒)に更新し、予定情報記憶部27の次ステップ表示時間及び次々ステップ表示時間の下限値及び上限値を、今回取得した歩進予定情報の次ステップ表示時間及び次々ステップ表示時間の下限値及び上限値に更新する。
【0087】
図9は更新後の内部情報を示す説明図である。更新後の内部情報は、予定情報記憶部27に記憶される。図9に示すように、内部情報は、今回取得した歩進予定情報(図8)の内容で更新されている。
【0088】
次に、歩進動作について説明する。下限監視タイマ24と上限監視タイマ25は、歩進予定情報取得時に現在ステップ残表示時間の下限時間及び上限時間がセットされた後、時間経過とともにカウントダウンされる。
【0089】
図10はタイマ値と歩進指令の状態を示す説明図である。図10の例では、下限監視タイマ24にタイマ値として5.0秒がセットされ、上限監視タイマ25にタイマ値として10.0秒がセットされた場合を示す。なお、セットされるタイマ値は一例であって、これに限定されるものではない。そして、図10に示すように、時間経過(図10の例では0.1秒経過の都度の状況を例示している)に応じて、タイマ値が変化する。
【0090】
下限監視タイマ24は、タイマ値が0.0秒より大きい場合に、下限監視中信号をオンとし、タイマ値が0.0秒になると下限監視中信号をオフとする。
【0091】
また、上限監視タイマ25は、タイマ値が0.0秒より大きい場合に、上限タイムアウト信号をオフとし、タイマ値が0.0秒になると上限タイムアウト信号をオンとする。
【0092】
下限監視中信号と上限タイムアウト信号は、歩進受付回路23へ出力されている。歩進受付回路23は、下限監視中信号、上限タイムアウト信号、最短時間監視タイマ21から入力される最短時間監視中信号、及び最長時間監視タイマ22から入力されるタイムアウト信号を用いて、CPU10からの歩進指令の正誤を判定して受付処理を行う。
【0093】
歩進受付回路23は、CPU10からの歩進指令を取得した場合に、最短時間監視中信号がオフであり、かつ下限監視中信号がオフ(下限監視タイマ値=0)のときには、CPU10は正常であるとして、歩進指令を受け付ける。この時、歩進受付回路23は、ステップカウンタ28を一つ進めるとともに、内部情報を更新する。
【0094】
この場合、内部情報の更新は、以下の通り行う。すなわち、歩進予定情報の次ステップ表示時間下限値を下限監視タイマ値とし、歩進予定情報の次ステップ表示時間上限値を上限監視タイマ値とする。また、次々ステップ表示時間下限値を次ステップ表示時間下限値とし、次々ステップ表示時間上限値を次ステップ表示時間上限値とする。また、次々の次のステップの表示時間下限値を次々ステップ表示時間下限値とし、次々の次のステップの表示時間上限値を次々ステップ表示時間上限値とする。なお、予定情報記憶部27に次々ステップ表示時間まで記憶しているが、これに限定されるものではない。
【0095】
歩進受付回路23は、CPU10からの歩進指令を取得した場合に、最短時間監視中信号がオン、または下限監視中信号がオン(下限監視タイマ値>0)であるときには、情報提供装置へ提供した歩進予定情報の残表示時間の範囲外のタイミングで歩進指令が入力されたということで、CPU10に何らかの異常が発生したものと判定し、歩進指令を無視し(採用しない)、歩進不可信号をCPU10及び情報送信部30へ出力する。
【0096】
情報送信部30は、歩進不可信号を取得した場合、CPU10が誤ったタイミングで歩進指令を出力したことから、提供する信号情報に含まれる信号灯色の切替タイミングと実際に灯色制御される切替タイミングとが矛盾することがないように、信号情報の送信を停止する。なお、情報送信部30の信号情報の送信停止は、歩進受付回路23が、CPU10から正しい歩進指令が出力された時点で解除され、信号情報の送信が再開される。
【0097】
また、歩進受付回路23は、CPU10からの歩進指令が入力されないまま最長時間監視タイムアウト信号がオンになった場合、あるいは、上限タイムアウト信号がオン(上限監視タイマ値=0)となった場合には、提供した歩進予定情報の上限値に達したので、CPU10に何らかの異常が発生したものと判定し、強制的に歩進処理を行う。歩進受付回路23は、この場合、ステップカウンタ28を一つ進めて内部情報の更新を行う。
【0098】
以上の仕組みにより、歩進予定情報の現在ステップ残表示時間の下限値から上限値の範囲内で歩進させることを保証することができる。
【0099】
また、CPU10が異常であると判定した場合に、CPU10で生成した歩進予定情報や歩進指令を採用しないようにし、CPU10が正常であるときの歩進予定情報や歩進指令を採用すれば、CPU10による誤った動作を防止することができ、異常時においても動作を保証することができ、信号灯器の実際の表示とは変化タイミングが異なる信号情報が提供されることを防止することができる。また、CPU10の異常をハードウエア回路で構成された灯色制御回路20で判定する構成としているので、CPU10の正常、異常を正確に検知することができ、装置の動作保証を確実にして信頼性を高めることができる。
【0100】
また、CPU10にオペレーティングシステムを搭載している場合には、複雑で高度なアプリケーションをマルチタスク環境で容易に構築可能であり、地点感応制御や需要予測制御など制御方式を高度化したソフトウエアに柔軟に対応することができる。例えば、OSを搭載したマルチタスク環境のアプリケーションソフトウエアの場合には、処理の順番や処理時間に揺らぎやバラツキが発生するケースがあり、本来処理されるべき時間内に処理が間に合わない、あるいは通常よりも早く処理が終了するといったケースや、想定されている順番とは異なる順番で処理が行われることで通常とは少し異なる処理結果となるケースがあり得る。また、ソフトウエアの場合には、装置の設置後に、ソフトウエアの機能追加や変更を行った上で、当該修正ソフトウエアを装置に再インストールするというケースも多く、容易に更新を行うことができる反面、追加・変更等した機能によって、設置した当初に期待された動作とは異なる動作となってしまうこともあり得る。したがって、信号情報のように装置外部に正しい情報を正しいタイミングで出力することについての必要性が高い情報については、その内容の正確性を担保するための仕組みをハードウエア(灯色制御部)に持たせることが好ましい。なお、このような仕組みをソフトウエアで実現することも可能であり、その場合には、情報内容のチェックを、通常の処理を行うタスクよりも優先順位の高いタスクで行ったり、割り込み処理などで行ったりすることが好ましい。また、ソフトウエアとハードウエアの双方でダブルチェックする仕組みを採用してもよい。
【0101】
また、信号灯色の切り替わりタイミングが交通状況等により変更になる場合でも、先の決定された歩進予定情報の時間範囲を越えないように後の歩進予定情報を決定することができるので、一旦決定された表示時間範囲外で信号灯色が切り替わるという事態を防ぎ、運転者や車両に不測の事態を発生させることも防止することができる。また、一旦決定された表示時間範囲内であれば限度時間が変化しても不測の事態を発生させることもない。
【0102】
図11はCPU10の処理手順の一例を示すフローチャートである。CPU10は、歩進予定情報を生成し(S101)、生成した歩進予定情報を灯色制御回路20へ出力する(S102)。CPU10は、灯色制御回路20から歩進予定情報の判定結果を取得したか否かを判定し(S103)、取得していない場合(S103でNO)、ステップS103の処理を続ける。
【0103】
灯色制御回路20から歩進予定情報の判定結果を取得した場合(S103でYES)、CPU10は、受付可であるか否かを判定し(S104)、受付可の場合(S104でYES)、生成した歩進予定情報を確定する(S105)。受付不可の場合(S104でNO)、CPU10は、生成した歩進予定情報を破棄し生成前(前回)の歩進予定情報を確定する(S106)。歩進予定情報を確定することにより、CPU10が正常なときに生成した歩進予定情報を採用することができる。
【0104】
CPU10は、確定した歩進予定情報に基づいて信号情報を生成し(S107)、生成した信号情報を情報提供装置へ送信し(S108)、処理を終了する。なお、上述の処理は、繰返し行うことができる。
【0105】
図12はCPU10の処理手順の他の例を示すフローチャートである。図11の処理との違いは、生成した歩進予定情報が誤っていた場合に、信号情報の送信を中止して再度歩進予定情報を生成する点である。
【0106】
CPU10は、歩進予定情報を生成し(S121)、生成した歩進予定情報を灯色制御回路20へ出力する(S122)。CPU10は、灯色制御回路20から歩進予定情報の判定結果を取得したか否かを判定し(S123)、取得していない場合(S123でNO)、ステップS123の処理を続ける。
【0107】
灯色制御回路20から歩進予定情報の判定結果を取得した場合(S123でYES)、CPU10は、受付可であるか否かを判定し(S124)、受付可の場合(S124でYES)、生成した歩進予定情報を確定する(S125)。受付不可の場合(S124でNO)、CPU10は、信号情報の送信を中止し(S126)、ステップS121以降の処理を続ける。
【0108】
CPU10は、確定した歩進予定情報に基づいて信号情報を生成し(S127)、生成した信号情報を情報提供装置へ送信し(S128)、処理を終了する。なお、上述の処理は、繰返し行うことができる。
【0109】
図13は灯色制御回路20の歩進予定情報の判定処理手順の一例を示すフローチャートである。灯色制御回路20は、CPU10から歩進予定情報を取得したか否かを判定し(S201)、取得していない場合(S201でNO)、ステップS201の処理を続ける。CPU10から歩進予定情報を取得した場合(S201でYES)、灯色制御回路20は、現在ステップの残表示時間が正しいか否かを判定する(S202)。
【0110】
現在ステップの残表示時間が正しい場合(S202でYES)、灯色制御回路20は、次ステップの表示時間が正しいか否かを判定し(S203)、次ステップの表示時間が正しい場合(S203でYES)、次々ステップの表示時間が正しいか否かを判定する(S204)。
【0111】
次々ステップの表示時間が正しい場合(S204でYES)、灯色制御回路20は、歩進予定情報に矛盾がなく、CPU10は正常であると判定して、受付可と判定し(S205)、受付可であることをCPU10へ出力する(S206)。灯色制御回路20は、内部情報を更新し(S207)、処理を終了する。
【0112】
現在ステップの残表示時間が正しくない場合(S202でNO)、次ステップの表示時間が正しくない場合(S203でNO)、あるいは次々ステップの表示時間が正しくない場合(S204でNO)、灯色制御回路20は、歩進予定情報に矛盾があり、CPU10は異常であると判定して、受付不可と判定する(S208)。灯色制御回路20は、受付不可であることをCPU10へ出力し(S209)、処理を終了する。
【0113】
図14は灯色制御回路20の歩進処理手順の一例を示すフローチャートである。灯色制御回路20は、CPU10から歩進指令の有無を判定し(S221)、歩進指令があった場合(S221でYES)、最短時間監視中信号がオンであるか否かを判定する(S222)。最短時間監視中信号がオフである場合(S222でNO)、灯色制御回路20は、最短時間監視タイマ21による監視時間は終了(歩進指令は一応有効)したとして、下限監視タイマ24の下限値が0より大きいか否かを判定する(S223)。
【0114】
下限監視タイマ24のタイマ値が0より大きくない場合(S223でNO)、灯色制御回路20は、下限監視タイマ24による監視時間は終了(歩進指令は有効)したとして、ステップカウンタ28をカウントアップして歩進を実施する(S224)。
【0115】
灯色制御回路20は、上限監視タイマ25のタイマ値を次ステップ上限時間で、下限監視タイマ24のタイマ値を次ステップ下限時間で更新し(S225)、予定情報記憶部27の次ステップ表示時間を次々ステップ表示時間で、次々ステップ表示時間を次々々ステップ表示時間で更新する(S226)。
【0116】
最短時間監視中信号がオンである場合(S222でYES)、あるいは、下限監視タイマ24のタイマ値が0より大きい場合(S223でYES)、灯色制御回路20は、歩進不可信号をCPU10へ出力する(S227)。
【0117】
CPU10から歩進指令がない場合(S221でNO)、灯色制御回路20は、最長時間監視タイムアウト信号がオンであるか否かを判定し(S228)、最長時間監視タイムアウト信号がオンである場合(S228でYES)、タイムアウト異常信号を出力し(S229)、ステップS224以降の処理を行う。
【0118】
最長時間監視タイムアウト信号がオフである場合(S228でNO)、灯色制御回路20は、上限監視タイマ25のタイマ値が0であるか否かを判定し(S230)、タイマ値が0である場合(S230でYES)、ステップS229以降の処理を続け、タイマ値が0でない場合(S230でNO)、後述のステップS231の処理を行う。
【0119】
灯色制御回路20は、処理を終了させるか否かを判定し(S231)、処理を終了させない場合(S231でNO)、ステップS221以降の処理を続け、処理を終了させる場合(S231でYES)、処理を終了する。
【0120】
なお、上述の処理においては、次々ステップの表示時間の下限値及び上限値の初期値が、該当ステップの最短監視時間及び最長監視時間になるので、最短時間監視中信号による判定処理と最長時間監視タイムアウト信号による判定処理は省略してもよい。
【0121】
以上説明したように、本発明によれば、ハードウエア回路自体で構成される灯色制御回路20がCPU10の異常を判定することができ、CPU10の異常時には、CPU10により生成された歩進予定情報や歩進指令を採用しないようにすることができるので、交通信号制御機全体としての動作を保証することができる。特に、CPU10が決定した信号灯器200の灯色の切替タイミングの情報(信号情報)が情報提供装置へ提供された後に、CPU10の異常により歩進予定情報が変化した場合でも、これを検知して、車両等へ提供した灯色の切替タイミングと矛盾するタイミング(一旦決定した表示時間の上限・下限の時間範囲外となるようなタイミング)で信号灯器200の灯色を変化させることを防止することができる。
【0122】
上述の実施の形態において、CPU10が歩進タイミング確定の時点で必ず上限値と下限値とが等しい歩進予定情報を出力する場合には、歩進指令は必ずしも必要ではなく、CPU10からの歩進指令の出力を省略した構成とすることができる。また、表示時間の残時間が0となった時点での歩進予定信号を歩進指令としてもよい。
【0123】
また、歩進予定情報がCPU10から出力されていない場合には、現示データの監視時間で判定処理を行ってもよい。また、歩進処理にてタイムアウトが発生した場合、あるいは、歩進予定情報の判定で誤りがあると判定された場合に、情報送信部30への送信許可をオフにする構成とするとともに、歩進予定情報が正しいと判定された場合に送信許可をオンにする構成とすることができる。
【0124】
上述の実施の形態においては、灯器制御回路20で情報を提供するか否かの判定処理を行う構成であったが、情報提供装置で行ってもよい。
【0125】
以上に開示された実施の形態及び実施例は、全ての点で例示であって制限的なものではないと考慮されるべきである。本発明の範囲は、以上の実施の形態及び実施例ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての修正や変形を含むものと意図される。
【符号の説明】
【0126】
10 CPU(演算部)
20 灯色制御回路(灯色制御部)
21 最短時間監視タイマ
22 最長時間監視タイマ
23 歩進受付回路(第2判定部)
24 下限監視タイマ
25 上限監視タイマ
26 予定情報判定回路(第1判定部、更新部、無効部)
27 予定情報記憶部(記憶部)
28 ステップカウンタ
29 灯色出力選択回路
30 情報送信部(送信部)
40 現示データメモリ
【特許請求の範囲】
【請求項1】
演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、
前記演算部は、
信号灯色の表示時間情報を繰返し生成するようにしてあり、
前記灯色制御部は、
前記演算部が生成した先後の表示時間情報同士の正誤を判定する第1判定部と、
該第1判定部で判定した判定結果に基づいて、前記演算部からの歩進指令の正誤を判定する第2判定部と
を備えることを特徴とする交通信号制御機。
【請求項2】
前記表示時間情報は、信号灯色の表示限度時間を含み、
前記第1判定部は、
表示時間情報の表示限度時間が、先の表示時間情報の表示限度時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする請求項1に記載の交通信号制御機。
【請求項3】
前記表示時間情報は、信号灯色の残表示限度時間を含み、
前記第1判定部は、
表示時間情報の残表示限度時間が、先の表示時間情報の残表示限度時間から前記先後の時間差を減算した時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする請求項1又は請求項2に記載の交通信号制御機。
【請求項4】
前記表示時間情報を記憶する記憶部と、
前記第1判定部で表示時間情報が正しいと判定した場合、記憶した表示時間情報を正しいと判定した表示時間情報で更新する更新部と
を備えることを特徴とする請求項1乃至請求項3のいずれか1項に記載の交通信号制御機。
【請求項5】
前記第1判定部で表示時間情報が正しいと判定した場合、該表示時間情報を含む所定の信号情報を外部へ送信する送信部を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載の交通信号制御機。
【請求項6】
前記送信部は、
前記第1判定部で表示時間情報が誤りと判定した場合、前記信号情報の送信を停止するように構成してあることを特徴とする請求項5に記載の交通信号制御機。
【請求項7】
前記第1判定部で表示時間情報が誤りと判定した場合、該表示時間情報を無効にする無効部を備えることを特徴とする請求項1乃至請求項6のいずれか1項に記載の交通信号制御機。
【請求項8】
前記灯色制御部は、
前記第1判定部で判定した判定結果を前記演算部へ出力するように構成してあり、
前記演算部は、
前記判定結果に応じて、所定の信号情報を外部へ出力するか否かを決定するように構成してあることを特徴とする請求項1乃至請求項4のいずれか1項に記載の交通信号制御機。
【請求項9】
前記灯色制御部は、
前記第2判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする請求項1乃至請求項8のいずれか1項に記載の交通信号制御機。
【請求項10】
前記演算部は、
プログラムコードにより動作を決定するように構成してあり、
前記灯色制御部は、
ハードウエア回路自体の構成により動作を決定するように構成してあることを特徴とする請求項1乃至請求項9のいずれか1項に記載の交通信号制御機。
【請求項11】
前記演算部には、オペレーティングシステムを搭載してあることを特徴とする請求項10に記載の交通信号制御機。
【請求項12】
演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、
前記演算部は、
信号灯色の表示時間情報を生成するようにしてあり、
前記演算部で生成した表示時間情報を外部へ送信する送信部を備え、
前記灯色制御部は、
前記演算部が生成した表示時間情報に基づいて、前記演算部からの歩進指令の正誤を判定する判定部を備え、
該判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする交通信号制御機。
【請求項13】
演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部を備える交通信号制御機の異常判定方法において、
信号灯色の表示時間情報を前記演算部により繰返し生成し、
前記灯色制御部は、
生成された先後の表示時間情報同士の正誤を第1判定部により判定し、
判定された判定結果に基づいて、前記演算部からの歩進指令の正誤を第2判定部により判定することを特徴とする交通信号制御機の異常判定方法。
【請求項1】
演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、
前記演算部は、
信号灯色の表示時間情報を繰返し生成するようにしてあり、
前記灯色制御部は、
前記演算部が生成した先後の表示時間情報同士の正誤を判定する第1判定部と、
該第1判定部で判定した判定結果に基づいて、前記演算部からの歩進指令の正誤を判定する第2判定部と
を備えることを特徴とする交通信号制御機。
【請求項2】
前記表示時間情報は、信号灯色の表示限度時間を含み、
前記第1判定部は、
表示時間情報の表示限度時間が、先の表示時間情報の表示限度時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする請求項1に記載の交通信号制御機。
【請求項3】
前記表示時間情報は、信号灯色の残表示限度時間を含み、
前記第1判定部は、
表示時間情報の残表示限度時間が、先の表示時間情報の残表示限度時間から前記先後の時間差を減算した時間に含まれるか又は一致する場合、前記表示時間情報が正しいと判定するように構成してあることを特徴とする請求項1又は請求項2に記載の交通信号制御機。
【請求項4】
前記表示時間情報を記憶する記憶部と、
前記第1判定部で表示時間情報が正しいと判定した場合、記憶した表示時間情報を正しいと判定した表示時間情報で更新する更新部と
を備えることを特徴とする請求項1乃至請求項3のいずれか1項に記載の交通信号制御機。
【請求項5】
前記第1判定部で表示時間情報が正しいと判定した場合、該表示時間情報を含む所定の信号情報を外部へ送信する送信部を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載の交通信号制御機。
【請求項6】
前記送信部は、
前記第1判定部で表示時間情報が誤りと判定した場合、前記信号情報の送信を停止するように構成してあることを特徴とする請求項5に記載の交通信号制御機。
【請求項7】
前記第1判定部で表示時間情報が誤りと判定した場合、該表示時間情報を無効にする無効部を備えることを特徴とする請求項1乃至請求項6のいずれか1項に記載の交通信号制御機。
【請求項8】
前記灯色制御部は、
前記第1判定部で判定した判定結果を前記演算部へ出力するように構成してあり、
前記演算部は、
前記判定結果に応じて、所定の信号情報を外部へ出力するか否かを決定するように構成してあることを特徴とする請求項1乃至請求項4のいずれか1項に記載の交通信号制御機。
【請求項9】
前記灯色制御部は、
前記第2判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする請求項1乃至請求項8のいずれか1項に記載の交通信号制御機。
【請求項10】
前記演算部は、
プログラムコードにより動作を決定するように構成してあり、
前記灯色制御部は、
ハードウエア回路自体の構成により動作を決定するように構成してあることを特徴とする請求項1乃至請求項9のいずれか1項に記載の交通信号制御機。
【請求項11】
前記演算部には、オペレーティングシステムを搭載してあることを特徴とする請求項10に記載の交通信号制御機。
【請求項12】
演算部と、該演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部とを備える交通信号制御機において、
前記演算部は、
信号灯色の表示時間情報を生成するようにしてあり、
前記演算部で生成した表示時間情報を外部へ送信する送信部を備え、
前記灯色制御部は、
前記演算部が生成した表示時間情報に基づいて、前記演算部からの歩進指令の正誤を判定する判定部を備え、
該判定部で判定した結果に応じて、信号灯器の灯色を制御するように構成してあることを特徴とする交通信号制御機。
【請求項13】
演算部からの歩進指令に基づいて信号灯器の灯色を制御する灯色制御部を備える交通信号制御機の異常判定方法において、
信号灯色の表示時間情報を前記演算部により繰返し生成し、
前記灯色制御部は、
生成された先後の表示時間情報同士の正誤を第1判定部により判定し、
判定された判定結果に基づいて、前記演算部からの歩進指令の正誤を第2判定部により判定することを特徴とする交通信号制御機の異常判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−277358(P2010−277358A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−129411(P2009−129411)
【出願日】平成21年5月28日(2009.5.28)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月28日(2009.5.28)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]