
交通信号制御装置、プログラム及び方法
【課題】プローブ車両から収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握することにより、当該交差点の渋滞が解消するように最適な信号パラメータを算出する。
【解決手段】交通管制センタ5において、車両が走行した時刻ごとの位置、速度の情報を含むプローブ情報を収集し、収集されたプローブ情報に基づき、交差点につながる道路の渋滞末尾位置を把握し、当該交差点につながる各道路の渋滞末尾位置から、当該交差点の渋滞が解消するように各交通信号機6の最適な青信号時間を制御する。
【解決手段】交通管制センタ5において、車両が走行した時刻ごとの位置、速度の情報を含むプローブ情報を収集し、収集されたプローブ情報に基づき、交差点につながる道路の渋滞末尾位置を把握し、当該交差点につながる各道路の渋滞末尾位置から、当該交差点の渋滞が解消するように各交通信号機6の最適な青信号時間を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、収集したプローブ情報から道路上の渋滞状況を把握して、その渋滞状況に応じて、渋滞が解消するように交通信号機の信号パラメータを算出する信号制御技術に関するものである。一般に交通信号機の信号パラメータには、サイクル時間、スプリット、オフセットがある。サイクル時間とは「青,黄,赤」と一周期の変化に要する時間のことである。スプリットとは、一周期時間内に占める、ある方向が青表示である時間の割合である。オフセットとは、隣接する交通信号機との青表示開始時刻のずれのことである。「プローブ情報」とは、走行した時刻ごとの位置などの情報をアップリンクすることができる車両(プローブ車両という)から得られる、走行した時刻ごとの位置などの情報をいう。
【背景技術】
【0002】
車両は、渋滞時には信号待ちで長時間停車を余儀なくされる。そこで、車両のスムーズな誘導には、交通信号機の信号パラメータを調整することが有効とされている。
例えば下記特許文献1には、プローブ車両から送信された渋滞判定のための情報及び当該プローブ車両の位置情報を受信し、受信した渋滞判定のための情報及び当該プローブ車両の位置情報に基づいて、交通信号機の制御情報を生成し、この制御情報を交通信号機へ送信する発明が記載されている。この文献における交通信号機の制御内容は、渋滞発生の有無及び渋滞度合いに応じて、サイクル時間、スプリット、オフセットなどの信号パラメータを適宜調整することである、とされている。
【特許文献1】特開2006-343814号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、交差点の渋滞を解消するためには、渋滞度に応じて、信号パラメータのどの部分をどのように具体的に調整するのか、という観点からの解析が求められる。
本発明者は、プローブ車両から収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握することにより、当該交差点の渋滞が解消するように最適な信号パラメータを算出できることに着目した。
【課題を解決するための手段】
【0004】
本発明の交通信号制御装置は、車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段と、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出する信号パラメータ算出手段と、算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備えるものである(請求項1)。
【0005】
この発明によれば、交差点の渋滞状況把握にプローブ情報を使用し、渋滞状況を緩和するような信号パラメータを算出し、算出した信号パラメータに基づく制御情報を交通信号機に反映するために通知することができる。各交通信号機は、受信した信号パラメータをもとに信号制御を行うので、車両はスムーズに交差点を通過することができる。
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき渋滞末尾位置を推定し、当該道路の当該交差点から渋滞末尾位置までの距離と、交差する他の道路の当該交差点から渋滞末尾位置までの距離との比に基づき、信号パラメータを算出するものであってもよい(請求項2)。
【0006】
これにより、当該道路及び交差する道路の、各渋滞末尾位置の車両が、少ない青信号回数で当該交差点を通過できるように、青信号時間を設定することができる。
渋滞末尾位置の推定は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、行うこともできる(請求項3)。
また、プローブ情報を収集した車両が2台である場合には、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の渋滞末尾位置を推定することもできる(請求項4)。
【0007】
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の当該道路及び交差する他の道路の渋滞末尾位置をそれぞれ推定し、この推定された渋滞末尾位置を用いて信号待ち車両台数をそれぞれ求め、この信号待ち車両台数と当該交差点における前記経路に沿った道路の交通容量とに基づいて渋滞末尾の車が交差点を通過するのに要する時間をそれぞれ求め、それらの時間の比に基づき、信号パラメータを算出するものであっても良い(請求項5)。特に交通容量を考慮することにより、信号パラメータの算出精度を上げることができる。
【0008】
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が同一交差点で、2回続いて赤信号で停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、信号待ち台数を推定することができるので、前記経路に沿った道路の交通容量を求めることができる(請求項6)。
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行うものであってもよい(請求項7)。複数の車線を有する道路の場合、渋滞度は車線ごとに異なる場合があるため、車線ごとに渋滞状況の把握を行えば、より精度の高い信号パラメータの算出をすることができる。
【0009】
本発明の交通信号制御プログラムは、コンピュータに格納されて実行されるプログラムであって、実質的に前記交通信号制御装置の発明と実質同一の発明に係るプログラムである(請求項8)。
また、本発明の交通信号制御方法は、実質的に前記交通信号制御装置の発明と実質同一の発明に係る方法である(請求項9)。
【発明の効果】
【0010】
以上のように本発明によれば、道路を走行する各車両から最新のプローブ情報を受信することにより、最新の渋滞状況の把握が行え、車両がその最適経路をスムーズに走行できるように信号パラメータの調整を行うことができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
図1は、本発明の交通信号制御装置を含む交通信号制御システムの全体構成を示す図である。
交通信号制御システムは、交通管制センタ5と、プローブ車両に搭載された車載装置1とを含むものである。この交通管制センタ5が本発明の交通信号制御装置の機能を果たす。「プローブ車両」とは、交通管制センタ5との通信により、車両の走行軌跡などの情報をアップリンクすることができる車両をいう。
【0012】
プローブ車両の車載装置1は、車両識別のためのコードを持ち、このコードを用いて交通管制センタ5と通信することができる。車載装置1は、当該車両の時刻ごとの位置、速度等のプローブ情報を生成し送信する。
交通管制センタ5は、各交差点に配置された交通信号機6の制御装置4と通信回線で接続されていて、制御装置4に対し、信号パラメータに基づく制御情報を送信する。制御装置4は、受信した制御情報に基づいて交通信号機6の信号を制御する。
【0013】
車載装置1と交通管制センタ5との間の通信を行う通信機11には、携帯電話機などの広域通信方式を用いることができる。また、路上通信機を介することを前提にするならば、車載装置1と路上通信機との間で、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication)等の、比較的エリアの狭い通信方式を用いることもでき、この場合、路上通信機と交通管制センタ5との間は、専用通信回線で接続することになる。前記路上通信機の設置場所は、車両と通信できる場所であれば任意であり、例えば、交通信号機6の設置場所と同一または交通信号機6の近くであってもよい。
【0014】
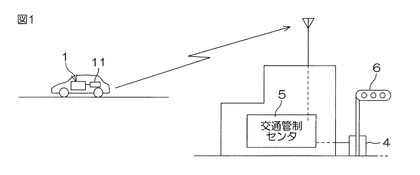
図2は、車載装置1の内部構成を示すブロック図である。車載装置1は、通信機11、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS受信機13、車両の速度パルスに基づいて車両の速度データを得る車速センサ15、車両の方位データを得る方位センサ17、前記GPS受信機13、車速センサ15及び方位センサ17等から得られる各種データに基づいて車両の時刻ごとの位置、速度などのプローブ情報を算出し通信機11に供給するための演算装置19、ドライバに案内情報を伝えるスピーカ23、表示装置25、並びに算出された位置、時刻のデータを一時的に記憶するメモリ21を備えている。
【0015】
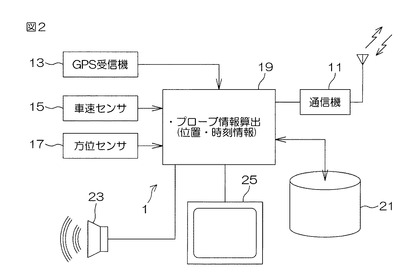
図3は、交通管制センタ5の内部構成を示すブロック図である。交通管制センタ5は、プローブ車両の車載装置1からプローブ情報を含む通信信号を受信し、車両の車載装置3からプローブ情報、目的地情報を含む通信信号を受信するための送受信機51、通信信号の中から目的地情報・プローブ情報などを抽出するデータ抽出部53、信号パラメータ算出部55、道路マッチング処理に用いるための道路地図データ57、算出された信号パラメータを交通信号機6の制御装置4に送信するため制御情報を作成する送信制御部59を備えている。
【0016】
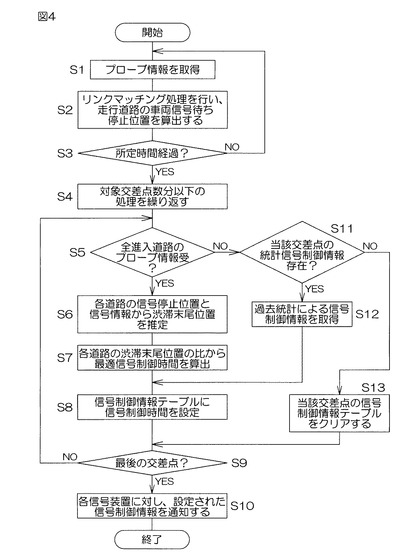
以下、信号パラメータ算出部55が実行する処理を、フローチャート(図4)を用いて詳説する。この信号パラメータ算出部55の機能の全部又は一部は、CD−ROMやハードディスクなど所定の媒体に記録されたプログラムを、交通管制センタ5のコンピュータが実行することにより実現される。
まず、信号パラメータ算出部55は、プローブ車両の車載装置1からプローブ情報を取得する(ステップS1)。そしてこれらの取得したプローブ情報に基づいて、各プローブ車両について道路マッチング処理(プローブ車両の軌跡を地図上の道路区間に沿わせるための処理)を行い、走行道路の信号待ち停止位置を算出する(ステップS2)。
【0017】
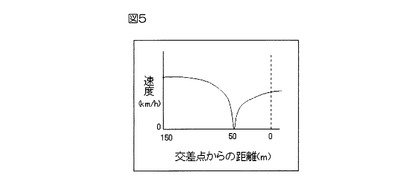
この信号待ち停止位置の算出処理は、プローブ情報に基づいて信号待ち停車行列の末尾位置を検出する処理である。図5、図6を用いて詳しく説明する。
(a)1回の信号サイクル時間で取得したプローブ情報が1件の場合
プローブ情報から得られる車両の速度と交差点からの距離との関係が、例えば図5のように、交差点の手前50mの位置で車両が停止しているものとする。
【0018】
この場合、信号パラメータの情報とプローブ情報から、プローブ車両の停車時間と赤信号時間との関係を求める。赤信号時間が60秒、車両の停止開始時刻が赤信号点灯開始から30秒経過後とすると、赤信号の点灯から30秒間で50mまで渋滞末尾位置が延びたことになり、1回の赤信号の最終的な渋滞末尾位置は100m(=50m×(60秒÷30秒))と予測できる。車の平均車長と平均車間距離との和を5mとすると、信号待ち車両台数は20台と推測できる。
【0019】
一般に、渋滞末尾位置Lは、次の(1)式を用いて推定される。
L=LS×(TR÷TΔR) (1)
ここで、LS:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR:車両停止時の赤信号経過時間である。
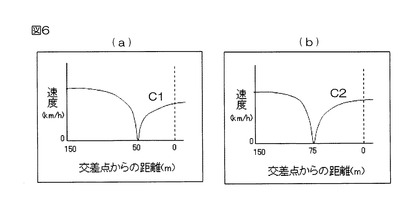
(b)1回の信号サイクルで取得したプローブ情報が2件以上ある場合
1回の信号サイクルの間に、図6(a),(b)に示すように、プローブ情報が2件受信された場合、それらのプローブ車両をC1,C2で表す。プローブ車両C1,C2の車両停止時刻と、車両停止位置(交差点からの距離)情報から渋滞末尾位置を算出する。
【0020】
例えば赤信号の時間が60秒、プローブ車両C1の停止開始時刻が赤信号点灯から30秒経過後、プローブ車両C2の停止開始時刻が赤信号点灯から40秒経過後とすると、直近の10秒間で25m渋滞末尾が延びたことになり、最終的な渋滞末尾位置は、125m(=75m+25m×(60−40)÷(40−30))と予測できる。
一般に、渋滞末尾位置Lは、次の(2)式で推定される。
【0021】
L=LS2+[(LS2−LS1)×(TR−TΔR2)÷(TΔR2−TΔR1)](2)
ここで、LS1、LS2:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR1、TΔR2:各車両停止時の赤信号経過時間である。
ただし、プローブ車両C1とプローブ車両C2の停止開始時の赤信号経過時間の差(TΔR2−TΔR1)が所定値(例えば、10秒)以下の場合は、プローブ車両C2の情報だけで渋滞末尾位置の算出を行うことが好ましい。この理由は、赤信号経過時間の差(TΔR2−TΔR1)が小さい値のときは、それを分母として計算したとき、誤差が大きくなるからである。
【0022】
なお1回の信号サイクルで、プローブ情報が3件以上ある場合は、当該サイクル内での最後の情報と1つ前の情報(赤信号経過時間の差が所定値(例えば、10秒)以下の場合は、所定値以上になるまで、前の情報に遡る)から算出する。なお1回の信号サイクルで、プローブ情報が2件以上ある場合も、最後の1件の情報だけで渋滞末尾位置を算出してもよい。
【0023】
次に、プローブ情報の収集時間が所定時間経過しているかどうかを参照する(ステップS3)。この所定時間は、各交差点で信号待ち停止位置の算出をするのに十分な数のプローブ情報が溜まることが予想される時間(例えば10分)に設定される。なお、プローブ情報が所定量蓄積されなかった場合、過去の統計による信号制御情報で代用するが、その詳細は下記ステップS12で解説する。
【0024】
所定時間が経過すると、交差点ごとに以下の処理を行う(ステップS4)。
ある交差点に注目する。1回の信号サイクルでその交差点の全進入道路について少なくとも1件のプローブ情報が得られているかどうか判断する(ステップS5)。得られていれば、各道路のプローブ車両の信号停止位置と信号情報から渋滞末尾位置を推定する。この推定方法は、前記(1)式、(2)式を用いて行うものであり、前に説明したとおりである。
【0025】
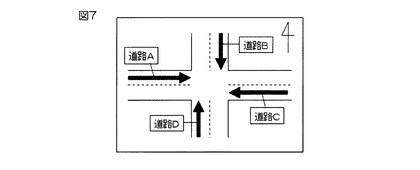
次に、各道路の渋滞末尾位置からの比から最適な青信号時間(スプリット)を算出する(ステップS7)。この算出処理を詳しく説明する。
図7は、1つの交差点に進入する道路A〜Dを示す地図である。南北路線を1つのペアとして考え、東西路線を1つのペアとして考える。
スプリットは、南北路線を構成する2本の道路の渋滞末尾位置の長いほうの値と、東西路線を構成する2本の道路の渋滞末尾位置の長いほうの値との比とする。
【0026】
例えば、各道路A〜Dの渋滞末尾位置が、道路A:100m、道路B:30m、道路C:40m、道路D:50mであった場合、南北路線の渋滞末尾位置の長いほうの値は道路Aの100m、東西路線の渋滞末尾位置の長いほうの値は道路Dの50mであるので、スプリットは、道路Aと道路Dの比を採用することになり、100:50となる。したがって、南北路線と東西路線の青信号の時間比が2:1になるように信号パラメータの値を設定する。
【0027】
なお、上記の信号パラメータの値は、渋滞末尾位置に比例していることが原則であるが、比の値を適当に丸めても良い。例えば、6:4、7:3、8:2と段階的に変化させていってもよい。
上述の最適な青信号時間の算出では、渋滞末尾位置の長さの比に応じて信号パラメータの値を設定したのに対し、各道路の交通容量(単位時間あたりの通行可能交通量;飽和交通流率ともいう)を考慮した設定を行ってもよい。
【0028】
青信号で単位時間あたりに交差点を通過できる車両の台数は、交差点の形状や駐車台数や工事等により変化する。例えば、一車線の道路の場合、左折方向の歩行者数が多い場合や、右折専用レーンがない場合、交通容量が小さくなる。複数車線の道路の場合、駐車や工事により車線規制されている場合は交通容量が小さくなる。このように各交差点の道路事情に応じて通過可能台数は異なる。そこで、各交差点の進入道路の交通容量も考慮した青信号時間の算出を行う。
【0029】
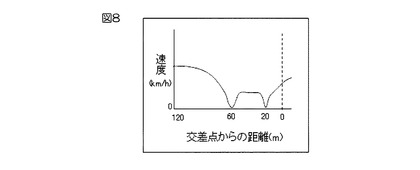
具体的には、図8のようなプローブ情報が得られた場合を想定する。
図8は、プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。プローブ車両は、図示のように、交差点の渋滞のため同一交差点の2回続く赤信号で停車しているものとする。一回目の停車位置は、交差点から60m、二回目の停車位置は、交差点から20mであるとする。この場合、1回の青信号の時間内で車両が進んだ距離は、40mである。平均車長と平均車間距離との和を5mとすると、当該車線を青信号で通過できた台数は8台であることがわかり、交通容量を推定できる。
【0030】
信号待ちによる2回停車が発生していない場合は、1回の信号待ち停車後に車両が進む距離の最大値を交通容量とする。ただし、最大値が標準的な交通容量とされている30台/分より大きくなる場合は、交通容量を標準値の30台/分としてもよい。
交差点において、南北路線と東西路線の青信号時間のスプリットを、渋滞末尾の車が交差点を通過するのに要する時間の比とする。
【0031】
例えば、図7の交差点において、各道路の渋滞末尾位置(台数)、交通容量(台/分)が
道路A:60m(12台)、交通容量20台
道路B:30m(6台)、交通容量20台
道路C:40m(8台)、交通容量30台
道路D:60m(12台)、交通容量30台
であった場合、単純に渋滞長の比とすると、道路A:道路Dで1:1になるが、ここでは交通容量を考慮するため、渋滞末尾の車が交差点を通過するのに要する時間を求める。その通過に要する時間は、道路A:0.6分(12÷20)、道路B:0.3分(6÷20)、道路C:0.27分(8÷30)、道路D:0.4分(12÷30)となる。したがって、南北路線では、道路Dの0.4分が一番長く、東西路線では道路Aの0.6分が一番長い。従って、スプリットを、渋滞末尾の車が交差点を通過するのに要する時間の比、0.6:0.4、すなわち3:2とする。
【0032】
今までの説明では、交差点に進入する道路に複数の車線があっても、特に車線を意識せずに、1本の道路として処理していたが、高精度位置認識技術が確立し、高精度地図データベースが整備されることを前提とすれば、走行車線の認識が十分に可能となる。
このときは、プローブ情報から走行車線の認識を行うことができるので、車線ごとの渋滞末尾位置、及び交通容量を算出することができる。
【0033】
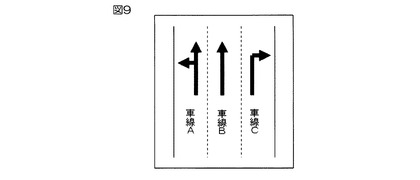
例えば、交差点に進入する各道路が、図9に示されるように、3本の車線を持っているものとする。左車線Aは直進・左折用、中央車線Bは直進用、右車線Cは右折用の車線であるとする。
図7の道路Dにおいて、車線ごとの渋滞末尾位置(台数)、交通容量(台/分)が、
車線A:60m(12台)、20台/分
車線B:60m(12台)、30台/分
車線C:30m(6台)、30台/分
であった場合、渋滞末尾の車が交差点を通過するのに要する時間は、車線A:0.6分(12÷20)、車線B:0.4分(12÷30)、車線C:0.2分(6÷30)となり、車線Aが一番時間がかかるので車線A基準にして道路Dの「車が交差点を通過するのに要する時間」を設定する。
【0034】
このように道路Dが0.6分であり、道路Aが0.4分、道路Bが0.3分、道路Cが0.27分であったとすると、南北路線では、道路Dの0.6分が一番長く、東西路線では道路Aの0.4分が一番長い。従って、スプリットを、0.6:0.4、すなわち3:2とする。
なお、走行車線の認識が行えない場合は、プローブ情報から当該交差点で左折や右折した車両を認識し、そのプローブ情報から車線Aや車線Cの渋滞末尾位置や交通容量を算出し、信号パラメータを設定してもよい。
【0035】
このように、車線ごとに渋滞末尾位置の車両が交差点を通過する時間を算出することができる。
スプリットが求まると、信号パラメータ算出部55(図3)は、信号制御情報テーブルに青信号時間、赤信号時間を含む信号パラメータを設定する(図4;ステップS8)。そして以上のステップS5からS8までの処理を各交差点について行う。すべての交差点について終了すれば、送信制御部59を通して、各信号装置に対し、設定された信号パラメータに基づく制御情報を通知する(ステップS10)。
【0036】
ここで、図4のステップS5において、進入道路のプローブ情報が受信できなかった場合を想定する。
本システムでは、交通管制センタ5からプローブ車両に対してエリアを指定して走行履歴データの送信を要求しているが、少し前に該当エリアを走行しても現時点ではそのエリアからはずれている場合、その車両の走行履歴データは送信されない。また、本システムに対応した車載システムを搭載した車両が少ない場合、十分な数の走行履歴データが得られない。
【0037】
この場合、当該交差点の統計的な信号パラメータが存在するかどうかを調べる(ステップS11)。この「統計的な信号パラメータ」とは、過去に設定した信号パラメータを統計処理して得られた信号パラメータである。この統計的な信号パラメータは過去の渋滞状況を考慮した内容になっている。なお、過去の渋滞状況を考慮した信号パラメータの算出において、時間帯別、曜日別、天候別等に応じて信号パラメータの値を変えてもよい。また、過去の渋滞情報を考慮した信号パラメータの算出において、渋滞状況のばらつきが少ない交差点、時間帯、曜日等についてのみ信号パラメータの算出を行ってもよい。
【0038】
当該交差点において統計的な信号パラメータがあれば、その統計的な信号パラメータを取得して(ステップS12)、ステップS8に進み、過去統計の渋滞情報を考慮して信号パラメータの算出を行う。この場合、過去統計の渋滞情報と、リアルタイムに受信したプローブ情報から得られる渋滞情報とを考慮して、信号パラメータの制御を行ってもよい。「考慮して」とは、例えばそれらの値の平均をとる等の操作を指す。この平均をとるときに、リアルタイム渋滞情報の係数に大きな重みを付け、過去統計の渋滞情報に軽い重みを付けることにより、リアルタイム渋滞情報を優先した処理を行って、信号パラメータの算出を行ってもよい。
【0039】
このように、過去の統計渋滞情報を考慮することで、リアルタイムのプローブ情報が存在しなくても、適切な信号制御が行える。
当該交差点において統計的な信号パラメータがなければ、当該交差点の信号パラメータをクリアして、デフォルト値(例えばスプリット=50%)を設定する(ステップS13)。
【0040】
以上で、本発明の実施の形態を説明したが、本発明の実施は、前記の形態に限定されるものではない。例えば、以上に説明した交通信号制御装置において、交通管制センタ5は、プローブ車両から受信したプローブ情報に基づいて各交差点の渋滞状況の把握を行っていたが、交通管制センタ5が外部機関から各道路の渋滞長の情報を取得できるのであれば、その取得した情報を活用してもよい。また、各交差点付近に設置された車両検知器からの検知情報に基づいて、渋滞末尾位置を推定しても良い。
【図面の簡単な説明】
【0041】
【図1】本発明の交通信号制御装置を含む交通信号制御システムの全体構成を示す図である。
【図2】車載装置1の内部構成を示すブロック図である。
【図3】交通管制センタ5の内部構成を示すブロック図である。
【図4】信号パラメータ算出部55の処理を説明するためのフローチャートである。
【図5】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図6】2台の車両のプローブ情報から得られる、速度と交差点からの距離との各関係を示すグラフである。
【図7】1つの交差点に進入する道路A〜Dを示す地図である。
【図8】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図9】交差点に進入する、3本の車線を持つ道路を示す地図である。
【符号の説明】
【0042】
1 プローブ車両の車載装置
4 交通信号機の制御装置
5 交通管制センタ
6 交通信号機
11 通信機
13 GPS受信機
15 車速センサ
17 方位センサ
19 演算装置
51 送受信機
53 データ抽出部
55 信号パラメータ算出部
57 道路地図データ
59 送信制御部
【技術分野】
【0001】
本発明は、収集したプローブ情報から道路上の渋滞状況を把握して、その渋滞状況に応じて、渋滞が解消するように交通信号機の信号パラメータを算出する信号制御技術に関するものである。一般に交通信号機の信号パラメータには、サイクル時間、スプリット、オフセットがある。サイクル時間とは「青,黄,赤」と一周期の変化に要する時間のことである。スプリットとは、一周期時間内に占める、ある方向が青表示である時間の割合である。オフセットとは、隣接する交通信号機との青表示開始時刻のずれのことである。「プローブ情報」とは、走行した時刻ごとの位置などの情報をアップリンクすることができる車両(プローブ車両という)から得られる、走行した時刻ごとの位置などの情報をいう。
【背景技術】
【0002】
車両は、渋滞時には信号待ちで長時間停車を余儀なくされる。そこで、車両のスムーズな誘導には、交通信号機の信号パラメータを調整することが有効とされている。
例えば下記特許文献1には、プローブ車両から送信された渋滞判定のための情報及び当該プローブ車両の位置情報を受信し、受信した渋滞判定のための情報及び当該プローブ車両の位置情報に基づいて、交通信号機の制御情報を生成し、この制御情報を交通信号機へ送信する発明が記載されている。この文献における交通信号機の制御内容は、渋滞発生の有無及び渋滞度合いに応じて、サイクル時間、スプリット、オフセットなどの信号パラメータを適宜調整することである、とされている。
【特許文献1】特開2006-343814号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、交差点の渋滞を解消するためには、渋滞度に応じて、信号パラメータのどの部分をどのように具体的に調整するのか、という観点からの解析が求められる。
本発明者は、プローブ車両から収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握することにより、当該交差点の渋滞が解消するように最適な信号パラメータを算出できることに着目した。
【課題を解決するための手段】
【0004】
本発明の交通信号制御装置は、車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段と、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出する信号パラメータ算出手段と、算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備えるものである(請求項1)。
【0005】
この発明によれば、交差点の渋滞状況把握にプローブ情報を使用し、渋滞状況を緩和するような信号パラメータを算出し、算出した信号パラメータに基づく制御情報を交通信号機に反映するために通知することができる。各交通信号機は、受信した信号パラメータをもとに信号制御を行うので、車両はスムーズに交差点を通過することができる。
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき渋滞末尾位置を推定し、当該道路の当該交差点から渋滞末尾位置までの距離と、交差する他の道路の当該交差点から渋滞末尾位置までの距離との比に基づき、信号パラメータを算出するものであってもよい(請求項2)。
【0006】
これにより、当該道路及び交差する道路の、各渋滞末尾位置の車両が、少ない青信号回数で当該交差点を通過できるように、青信号時間を設定することができる。
渋滞末尾位置の推定は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、行うこともできる(請求項3)。
また、プローブ情報を収集した車両が2台である場合には、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の渋滞末尾位置を推定することもできる(請求項4)。
【0007】
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の当該道路及び交差する他の道路の渋滞末尾位置をそれぞれ推定し、この推定された渋滞末尾位置を用いて信号待ち車両台数をそれぞれ求め、この信号待ち車両台数と当該交差点における前記経路に沿った道路の交通容量とに基づいて渋滞末尾の車が交差点を通過するのに要する時間をそれぞれ求め、それらの時間の比に基づき、信号パラメータを算出するものであっても良い(請求項5)。特に交通容量を考慮することにより、信号パラメータの算出精度を上げることができる。
【0008】
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が同一交差点で、2回続いて赤信号で停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、信号待ち台数を推定することができるので、前記経路に沿った道路の交通容量を求めることができる(請求項6)。
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行うものであってもよい(請求項7)。複数の車線を有する道路の場合、渋滞度は車線ごとに異なる場合があるため、車線ごとに渋滞状況の把握を行えば、より精度の高い信号パラメータの算出をすることができる。
【0009】
本発明の交通信号制御プログラムは、コンピュータに格納されて実行されるプログラムであって、実質的に前記交通信号制御装置の発明と実質同一の発明に係るプログラムである(請求項8)。
また、本発明の交通信号制御方法は、実質的に前記交通信号制御装置の発明と実質同一の発明に係る方法である(請求項9)。
【発明の効果】
【0010】
以上のように本発明によれば、道路を走行する各車両から最新のプローブ情報を受信することにより、最新の渋滞状況の把握が行え、車両がその最適経路をスムーズに走行できるように信号パラメータの調整を行うことができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
図1は、本発明の交通信号制御装置を含む交通信号制御システムの全体構成を示す図である。
交通信号制御システムは、交通管制センタ5と、プローブ車両に搭載された車載装置1とを含むものである。この交通管制センタ5が本発明の交通信号制御装置の機能を果たす。「プローブ車両」とは、交通管制センタ5との通信により、車両の走行軌跡などの情報をアップリンクすることができる車両をいう。
【0012】
プローブ車両の車載装置1は、車両識別のためのコードを持ち、このコードを用いて交通管制センタ5と通信することができる。車載装置1は、当該車両の時刻ごとの位置、速度等のプローブ情報を生成し送信する。
交通管制センタ5は、各交差点に配置された交通信号機6の制御装置4と通信回線で接続されていて、制御装置4に対し、信号パラメータに基づく制御情報を送信する。制御装置4は、受信した制御情報に基づいて交通信号機6の信号を制御する。
【0013】
車載装置1と交通管制センタ5との間の通信を行う通信機11には、携帯電話機などの広域通信方式を用いることができる。また、路上通信機を介することを前提にするならば、車載装置1と路上通信機との間で、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication)等の、比較的エリアの狭い通信方式を用いることもでき、この場合、路上通信機と交通管制センタ5との間は、専用通信回線で接続することになる。前記路上通信機の設置場所は、車両と通信できる場所であれば任意であり、例えば、交通信号機6の設置場所と同一または交通信号機6の近くであってもよい。
【0014】
図2は、車載装置1の内部構成を示すブロック図である。車載装置1は、通信機11、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS受信機13、車両の速度パルスに基づいて車両の速度データを得る車速センサ15、車両の方位データを得る方位センサ17、前記GPS受信機13、車速センサ15及び方位センサ17等から得られる各種データに基づいて車両の時刻ごとの位置、速度などのプローブ情報を算出し通信機11に供給するための演算装置19、ドライバに案内情報を伝えるスピーカ23、表示装置25、並びに算出された位置、時刻のデータを一時的に記憶するメモリ21を備えている。
【0015】
図3は、交通管制センタ5の内部構成を示すブロック図である。交通管制センタ5は、プローブ車両の車載装置1からプローブ情報を含む通信信号を受信し、車両の車載装置3からプローブ情報、目的地情報を含む通信信号を受信するための送受信機51、通信信号の中から目的地情報・プローブ情報などを抽出するデータ抽出部53、信号パラメータ算出部55、道路マッチング処理に用いるための道路地図データ57、算出された信号パラメータを交通信号機6の制御装置4に送信するため制御情報を作成する送信制御部59を備えている。
【0016】
以下、信号パラメータ算出部55が実行する処理を、フローチャート(図4)を用いて詳説する。この信号パラメータ算出部55の機能の全部又は一部は、CD−ROMやハードディスクなど所定の媒体に記録されたプログラムを、交通管制センタ5のコンピュータが実行することにより実現される。
まず、信号パラメータ算出部55は、プローブ車両の車載装置1からプローブ情報を取得する(ステップS1)。そしてこれらの取得したプローブ情報に基づいて、各プローブ車両について道路マッチング処理(プローブ車両の軌跡を地図上の道路区間に沿わせるための処理)を行い、走行道路の信号待ち停止位置を算出する(ステップS2)。
【0017】
この信号待ち停止位置の算出処理は、プローブ情報に基づいて信号待ち停車行列の末尾位置を検出する処理である。図5、図6を用いて詳しく説明する。
(a)1回の信号サイクル時間で取得したプローブ情報が1件の場合
プローブ情報から得られる車両の速度と交差点からの距離との関係が、例えば図5のように、交差点の手前50mの位置で車両が停止しているものとする。
【0018】
この場合、信号パラメータの情報とプローブ情報から、プローブ車両の停車時間と赤信号時間との関係を求める。赤信号時間が60秒、車両の停止開始時刻が赤信号点灯開始から30秒経過後とすると、赤信号の点灯から30秒間で50mまで渋滞末尾位置が延びたことになり、1回の赤信号の最終的な渋滞末尾位置は100m(=50m×(60秒÷30秒))と予測できる。車の平均車長と平均車間距離との和を5mとすると、信号待ち車両台数は20台と推測できる。
【0019】
一般に、渋滞末尾位置Lは、次の(1)式を用いて推定される。
L=LS×(TR÷TΔR) (1)
ここで、LS:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR:車両停止時の赤信号経過時間である。
(b)1回の信号サイクルで取得したプローブ情報が2件以上ある場合
1回の信号サイクルの間に、図6(a),(b)に示すように、プローブ情報が2件受信された場合、それらのプローブ車両をC1,C2で表す。プローブ車両C1,C2の車両停止時刻と、車両停止位置(交差点からの距離)情報から渋滞末尾位置を算出する。
【0020】
例えば赤信号の時間が60秒、プローブ車両C1の停止開始時刻が赤信号点灯から30秒経過後、プローブ車両C2の停止開始時刻が赤信号点灯から40秒経過後とすると、直近の10秒間で25m渋滞末尾が延びたことになり、最終的な渋滞末尾位置は、125m(=75m+25m×(60−40)÷(40−30))と予測できる。
一般に、渋滞末尾位置Lは、次の(2)式で推定される。
【0021】
L=LS2+[(LS2−LS1)×(TR−TΔR2)÷(TΔR2−TΔR1)](2)
ここで、LS1、LS2:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR1、TΔR2:各車両停止時の赤信号経過時間である。
ただし、プローブ車両C1とプローブ車両C2の停止開始時の赤信号経過時間の差(TΔR2−TΔR1)が所定値(例えば、10秒)以下の場合は、プローブ車両C2の情報だけで渋滞末尾位置の算出を行うことが好ましい。この理由は、赤信号経過時間の差(TΔR2−TΔR1)が小さい値のときは、それを分母として計算したとき、誤差が大きくなるからである。
【0022】
なお1回の信号サイクルで、プローブ情報が3件以上ある場合は、当該サイクル内での最後の情報と1つ前の情報(赤信号経過時間の差が所定値(例えば、10秒)以下の場合は、所定値以上になるまで、前の情報に遡る)から算出する。なお1回の信号サイクルで、プローブ情報が2件以上ある場合も、最後の1件の情報だけで渋滞末尾位置を算出してもよい。
【0023】
次に、プローブ情報の収集時間が所定時間経過しているかどうかを参照する(ステップS3)。この所定時間は、各交差点で信号待ち停止位置の算出をするのに十分な数のプローブ情報が溜まることが予想される時間(例えば10分)に設定される。なお、プローブ情報が所定量蓄積されなかった場合、過去の統計による信号制御情報で代用するが、その詳細は下記ステップS12で解説する。
【0024】
所定時間が経過すると、交差点ごとに以下の処理を行う(ステップS4)。
ある交差点に注目する。1回の信号サイクルでその交差点の全進入道路について少なくとも1件のプローブ情報が得られているかどうか判断する(ステップS5)。得られていれば、各道路のプローブ車両の信号停止位置と信号情報から渋滞末尾位置を推定する。この推定方法は、前記(1)式、(2)式を用いて行うものであり、前に説明したとおりである。
【0025】
次に、各道路の渋滞末尾位置からの比から最適な青信号時間(スプリット)を算出する(ステップS7)。この算出処理を詳しく説明する。
図7は、1つの交差点に進入する道路A〜Dを示す地図である。南北路線を1つのペアとして考え、東西路線を1つのペアとして考える。
スプリットは、南北路線を構成する2本の道路の渋滞末尾位置の長いほうの値と、東西路線を構成する2本の道路の渋滞末尾位置の長いほうの値との比とする。
【0026】
例えば、各道路A〜Dの渋滞末尾位置が、道路A:100m、道路B:30m、道路C:40m、道路D:50mであった場合、南北路線の渋滞末尾位置の長いほうの値は道路Aの100m、東西路線の渋滞末尾位置の長いほうの値は道路Dの50mであるので、スプリットは、道路Aと道路Dの比を採用することになり、100:50となる。したがって、南北路線と東西路線の青信号の時間比が2:1になるように信号パラメータの値を設定する。
【0027】
なお、上記の信号パラメータの値は、渋滞末尾位置に比例していることが原則であるが、比の値を適当に丸めても良い。例えば、6:4、7:3、8:2と段階的に変化させていってもよい。
上述の最適な青信号時間の算出では、渋滞末尾位置の長さの比に応じて信号パラメータの値を設定したのに対し、各道路の交通容量(単位時間あたりの通行可能交通量;飽和交通流率ともいう)を考慮した設定を行ってもよい。
【0028】
青信号で単位時間あたりに交差点を通過できる車両の台数は、交差点の形状や駐車台数や工事等により変化する。例えば、一車線の道路の場合、左折方向の歩行者数が多い場合や、右折専用レーンがない場合、交通容量が小さくなる。複数車線の道路の場合、駐車や工事により車線規制されている場合は交通容量が小さくなる。このように各交差点の道路事情に応じて通過可能台数は異なる。そこで、各交差点の進入道路の交通容量も考慮した青信号時間の算出を行う。
【0029】
具体的には、図8のようなプローブ情報が得られた場合を想定する。
図8は、プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。プローブ車両は、図示のように、交差点の渋滞のため同一交差点の2回続く赤信号で停車しているものとする。一回目の停車位置は、交差点から60m、二回目の停車位置は、交差点から20mであるとする。この場合、1回の青信号の時間内で車両が進んだ距離は、40mである。平均車長と平均車間距離との和を5mとすると、当該車線を青信号で通過できた台数は8台であることがわかり、交通容量を推定できる。
【0030】
信号待ちによる2回停車が発生していない場合は、1回の信号待ち停車後に車両が進む距離の最大値を交通容量とする。ただし、最大値が標準的な交通容量とされている30台/分より大きくなる場合は、交通容量を標準値の30台/分としてもよい。
交差点において、南北路線と東西路線の青信号時間のスプリットを、渋滞末尾の車が交差点を通過するのに要する時間の比とする。
【0031】
例えば、図7の交差点において、各道路の渋滞末尾位置(台数)、交通容量(台/分)が
道路A:60m(12台)、交通容量20台
道路B:30m(6台)、交通容量20台
道路C:40m(8台)、交通容量30台
道路D:60m(12台)、交通容量30台
であった場合、単純に渋滞長の比とすると、道路A:道路Dで1:1になるが、ここでは交通容量を考慮するため、渋滞末尾の車が交差点を通過するのに要する時間を求める。その通過に要する時間は、道路A:0.6分(12÷20)、道路B:0.3分(6÷20)、道路C:0.27分(8÷30)、道路D:0.4分(12÷30)となる。したがって、南北路線では、道路Dの0.4分が一番長く、東西路線では道路Aの0.6分が一番長い。従って、スプリットを、渋滞末尾の車が交差点を通過するのに要する時間の比、0.6:0.4、すなわち3:2とする。
【0032】
今までの説明では、交差点に進入する道路に複数の車線があっても、特に車線を意識せずに、1本の道路として処理していたが、高精度位置認識技術が確立し、高精度地図データベースが整備されることを前提とすれば、走行車線の認識が十分に可能となる。
このときは、プローブ情報から走行車線の認識を行うことができるので、車線ごとの渋滞末尾位置、及び交通容量を算出することができる。
【0033】
例えば、交差点に進入する各道路が、図9に示されるように、3本の車線を持っているものとする。左車線Aは直進・左折用、中央車線Bは直進用、右車線Cは右折用の車線であるとする。
図7の道路Dにおいて、車線ごとの渋滞末尾位置(台数)、交通容量(台/分)が、
車線A:60m(12台)、20台/分
車線B:60m(12台)、30台/分
車線C:30m(6台)、30台/分
であった場合、渋滞末尾の車が交差点を通過するのに要する時間は、車線A:0.6分(12÷20)、車線B:0.4分(12÷30)、車線C:0.2分(6÷30)となり、車線Aが一番時間がかかるので車線A基準にして道路Dの「車が交差点を通過するのに要する時間」を設定する。
【0034】
このように道路Dが0.6分であり、道路Aが0.4分、道路Bが0.3分、道路Cが0.27分であったとすると、南北路線では、道路Dの0.6分が一番長く、東西路線では道路Aの0.4分が一番長い。従って、スプリットを、0.6:0.4、すなわち3:2とする。
なお、走行車線の認識が行えない場合は、プローブ情報から当該交差点で左折や右折した車両を認識し、そのプローブ情報から車線Aや車線Cの渋滞末尾位置や交通容量を算出し、信号パラメータを設定してもよい。
【0035】
このように、車線ごとに渋滞末尾位置の車両が交差点を通過する時間を算出することができる。
スプリットが求まると、信号パラメータ算出部55(図3)は、信号制御情報テーブルに青信号時間、赤信号時間を含む信号パラメータを設定する(図4;ステップS8)。そして以上のステップS5からS8までの処理を各交差点について行う。すべての交差点について終了すれば、送信制御部59を通して、各信号装置に対し、設定された信号パラメータに基づく制御情報を通知する(ステップS10)。
【0036】
ここで、図4のステップS5において、進入道路のプローブ情報が受信できなかった場合を想定する。
本システムでは、交通管制センタ5からプローブ車両に対してエリアを指定して走行履歴データの送信を要求しているが、少し前に該当エリアを走行しても現時点ではそのエリアからはずれている場合、その車両の走行履歴データは送信されない。また、本システムに対応した車載システムを搭載した車両が少ない場合、十分な数の走行履歴データが得られない。
【0037】
この場合、当該交差点の統計的な信号パラメータが存在するかどうかを調べる(ステップS11)。この「統計的な信号パラメータ」とは、過去に設定した信号パラメータを統計処理して得られた信号パラメータである。この統計的な信号パラメータは過去の渋滞状況を考慮した内容になっている。なお、過去の渋滞状況を考慮した信号パラメータの算出において、時間帯別、曜日別、天候別等に応じて信号パラメータの値を変えてもよい。また、過去の渋滞情報を考慮した信号パラメータの算出において、渋滞状況のばらつきが少ない交差点、時間帯、曜日等についてのみ信号パラメータの算出を行ってもよい。
【0038】
当該交差点において統計的な信号パラメータがあれば、その統計的な信号パラメータを取得して(ステップS12)、ステップS8に進み、過去統計の渋滞情報を考慮して信号パラメータの算出を行う。この場合、過去統計の渋滞情報と、リアルタイムに受信したプローブ情報から得られる渋滞情報とを考慮して、信号パラメータの制御を行ってもよい。「考慮して」とは、例えばそれらの値の平均をとる等の操作を指す。この平均をとるときに、リアルタイム渋滞情報の係数に大きな重みを付け、過去統計の渋滞情報に軽い重みを付けることにより、リアルタイム渋滞情報を優先した処理を行って、信号パラメータの算出を行ってもよい。
【0039】
このように、過去の統計渋滞情報を考慮することで、リアルタイムのプローブ情報が存在しなくても、適切な信号制御が行える。
当該交差点において統計的な信号パラメータがなければ、当該交差点の信号パラメータをクリアして、デフォルト値(例えばスプリット=50%)を設定する(ステップS13)。
【0040】
以上で、本発明の実施の形態を説明したが、本発明の実施は、前記の形態に限定されるものではない。例えば、以上に説明した交通信号制御装置において、交通管制センタ5は、プローブ車両から受信したプローブ情報に基づいて各交差点の渋滞状況の把握を行っていたが、交通管制センタ5が外部機関から各道路の渋滞長の情報を取得できるのであれば、その取得した情報を活用してもよい。また、各交差点付近に設置された車両検知器からの検知情報に基づいて、渋滞末尾位置を推定しても良い。
【図面の簡単な説明】
【0041】
【図1】本発明の交通信号制御装置を含む交通信号制御システムの全体構成を示す図である。
【図2】車載装置1の内部構成を示すブロック図である。
【図3】交通管制センタ5の内部構成を示すブロック図である。
【図4】信号パラメータ算出部55の処理を説明するためのフローチャートである。
【図5】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図6】2台の車両のプローブ情報から得られる、速度と交差点からの距離との各関係を示すグラフである。
【図7】1つの交差点に進入する道路A〜Dを示す地図である。
【図8】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図9】交差点に進入する、3本の車線を持つ道路を示す地図である。
【符号の説明】
【0042】
1 プローブ車両の車載装置
4 交通信号機の制御装置
5 交通管制センタ
6 交通信号機
11 通信機
13 GPS受信機
15 車速センサ
17 方位センサ
19 演算装置
51 送受信機
53 データ抽出部
55 信号パラメータ算出部
57 道路地図データ
59 送信制御部
【特許請求の範囲】
【請求項1】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段と、
前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出する信号パラメータ算出手段と、
算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備えることを特徴とする交通信号制御装置。
【請求項2】
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき渋滞末尾位置を推定し、当該道路の当該交差点から渋滞末尾位置までの距離と、交差する他の道路の当該交差点から渋滞末尾位置までの距離との比に基づき、信号パラメータを算出する請求項1記載の交通信号制御装置。
【請求項3】
前記信号パラメータ算出手段は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、交差点の渋滞末尾位置を推定する請求項2記載の交通信号制御装置。
【請求項4】
前記信号パラメータ算出手段は、プローブ情報を収集した車両が2台である場合に、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の渋滞末尾位置を推定する請求項2記載の交通信号制御装置。
【請求項5】
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の当該道路及び交差する他の道路の渋滞末尾位置をそれぞれ推定し、この推定された渋滞末尾位置を用いて信号待ち車両台数をそれぞれ求め、この信号待ち車両台数と当該交差点における前記経路に沿った道路の交通容量とに基づいて渋滞末尾の車が交差点を通過するのに要する時間をそれぞれ求め、それらの時間の比に基づき、信号パラメータを算出する請求項1記載の交通信号制御装置。
【請求項6】
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が、同一交差点で、2回続いた赤信号でそれぞれ停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、前記経路に沿った道路の交通容量を求める請求項5記載の交通信号制御装置。
【請求項7】
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行う請求項1から請求項6までのいずれか1項記載の交通信号制御装置。
【請求項8】
コンピュータに格納されることによって実行される交通信号制御プログラムであって、
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するステップと、
前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出するステップと、
算出された信号パラメータに基づく制御情報を交通信号機に通知するステップとを含むことを特徴とする交通信号制御プログラム。
【請求項9】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集し、
前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出し、
算出された信号パラメータに基づく制御情報を交通信号機に通知することを特徴とする交通信号制御方法。
【請求項1】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段と、
前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出する信号パラメータ算出手段と、
算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備えることを特徴とする交通信号制御装置。
【請求項2】
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき渋滞末尾位置を推定し、当該道路の当該交差点から渋滞末尾位置までの距離と、交差する他の道路の当該交差点から渋滞末尾位置までの距離との比に基づき、信号パラメータを算出する請求項1記載の交通信号制御装置。
【請求項3】
前記信号パラメータ算出手段は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、交差点の渋滞末尾位置を推定する請求項2記載の交通信号制御装置。
【請求項4】
前記信号パラメータ算出手段は、プローブ情報を収集した車両が2台である場合に、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の渋滞末尾位置を推定する請求項2記載の交通信号制御装置。
【請求項5】
前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の当該道路及び交差する他の道路の渋滞末尾位置をそれぞれ推定し、この推定された渋滞末尾位置を用いて信号待ち車両台数をそれぞれ求め、この信号待ち車両台数と当該交差点における前記経路に沿った道路の交通容量とに基づいて渋滞末尾の車が交差点を通過するのに要する時間をそれぞれ求め、それらの時間の比に基づき、信号パラメータを算出する請求項1記載の交通信号制御装置。
【請求項6】
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が、同一交差点で、2回続いた赤信号でそれぞれ停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、前記経路に沿った道路の交通容量を求める請求項5記載の交通信号制御装置。
【請求項7】
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行う請求項1から請求項6までのいずれか1項記載の交通信号制御装置。
【請求項8】
コンピュータに格納されることによって実行される交通信号制御プログラムであって、
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するステップと、
前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出するステップと、
算出された信号パラメータに基づく制御情報を交通信号機に通知するステップとを含むことを特徴とする交通信号制御プログラム。
【請求項9】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集し、
前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点につながる道路の渋滞状況を把握し、当該交差点につながる各道路の渋滞状況から、当該交差点の渋滞が解消するように最適な信号パラメータを算出し、
算出された信号パラメータに基づく制御情報を交通信号機に通知することを特徴とする交通信号制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−146138(P2009−146138A)
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願番号】特願2007−322286(P2007−322286)
【出願日】平成19年12月13日(2007.12.13)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願日】平成19年12月13日(2007.12.13)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]