
交通制御システム

【課題】 交差点内での車両間の衝突事故を防止することのできる、交通制御システムを提供する。
【解決手段】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機3に測距装置4を設置し、交差点に進入する車両2に被測距装置5を搭載し、信号機3に設置した測距装置4が、交差点に接近した自車以外の車両2と信号機3との距離を測定し、交差点に自車以外の車両2が所定距離まで接近した場合、自車1に警告を発するものである。
【解決手段】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機3に測距装置4を設置し、交差点に進入する車両2に被測距装置5を搭載し、信号機3に設置した測距装置4が、交差点に接近した自車以外の車両2と信号機3との距離を測定し、交差点に自車以外の車両2が所定距離まで接近した場合、自車1に警告を発するものである。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、交差点での交通事故を防止する交通制御システムに関する。
【0002】
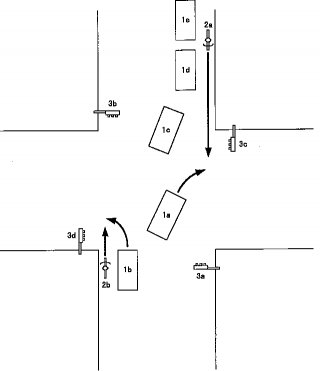
【従来の技術】図8は、交差点における従来の交通制御システムを示す。従来の方法では、信号機3a,3b,3c,3dの信号灯を、青・黄・赤のどれかの色のものが点灯するように制御して、自動車・自動二輪車・歩行者等に進行、停止の命令を与えるように構成されている。
【0003】
【発明が解決しようとする課題】しかしながら、従来の構成では、自動車と自動二輪車の衝突事故を防止するのが困難な場合がある。例えば、信号機3a,3bが青または黄の場合、右折しようとしている自動車1aは、他の自動車1d,1eの陰に隠れて見えない場所を進行してくる自動二輪車2aの存在に気づかずに右折してしまい、交差点内でその自動二輪車と衝突事故をおこす可能性がある(右直事故)。また、左折しようとしている自動車1bは、自車の死角にあって見えない場所を進行してくる自動二輪車2bの存在に気づかずに左折してしまい、その自動二輪車と巻き込み事故や接触事故をおこす可能性がある(左直事故)。
【0004】従来の交通制御システムでは、単に、全体の交通の進行、停止の命令を与えるだけで、右直事故や左直事故が起こり得ることの注意を喚起する機能が無く、上記のような自動車と自動二輪車の衝突事故防止には無力であるという、問題点がある。このような自動車と自動二輪車の衝突事故の場合、自動二輪車の運転者の死亡や重傷等の重大事故にいたる場合が多く、そのような事故を防止することが社会的に強く要請されている。
【0005】そこで、本発明の目的は、交差点内での車両間の衝突事故を防止する、交通制御システムを提供することにある。
【0006】
【課題を解決するための手段】請求項1記載の発明は、交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、自車に警告を発する手段を備えた、ことを特徴とする。
【0007】請求項2記載の発明は、交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、前記信号機の近傍または信号機自体に警告表示機を設置し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、警告表示機に警告表示を行う手段を備えた、ことを特徴とする。
【0008】請求項3記載の発明は、交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置及び送信機を設置し、交差点に進入する車両に被測距装置を搭載し、自車に受信機及び音声警告装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、信号機に設置した送信機から自車の受信機に危険信号を送信し、自車の音声警告装置が危険を音声出力する、ことを特徴とする。
【0009】請求項4記載の発明は、請求項1〜3のいずれかに記載のものにおいて、測距装置が、被測距装置との間で電波を送受信して、この信号の往復時間から距離を算出することを特徴とする。
【0010】請求項5記載の発明は、請求項1〜4のいずれかに記載のものにおいて、信号機が青または黄の時、信号機に設置した測距装置の電源をONし、信号機が赤の時は当該電源をOFFすることを特徴とする。
【0011】請求項6記載の発明は、請求項1〜5のいずれかに記載のものにおいて、車両が走行状態にある時、車両に搭載した被測距装置の電源をONし、車両が停止している時は当該電源をOFFすることを特徴とする。
【0012】請求項7記載の発明は、請求項1〜6のいずれかに記載のものにおいて、被測距装置を搭載した車両が自動二輪車であることを特徴とする。
【0013】
【発明の実施の形態】以下、本発明の一実施形態を添付の図面を参照して説明する。
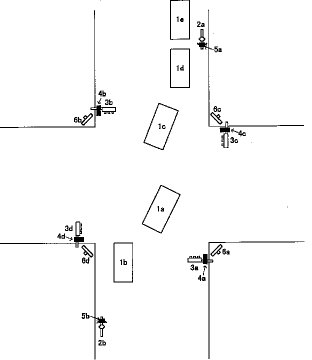
【0014】図1は、本実施形態による交通制御システムを示し、1a,1b,1c,1d,1eは自動車を示している。交差点の信号機3a,3b,3c,3dには、それぞれ測距装置4a,4b,4c,4dが設置されている。また、道路を進行する自動二輪車2a,2bには、それぞれ被測距装置5a,5bが搭載されている。さらに、各信号機3a〜3dの近傍または信号機自体に、それぞれ警告表示機6a,6b,6c,6dが設置されている。
【0015】各信号機3a〜3dに設置されている測距装置4a〜4dは、その信号機が交通制御する道路側を進行する自動二輪車に搭載された被測距装置と自分との間の距離を測定するものとする。例えば、信号機3aに設置した測距装置4aは自動二輪車2aに搭載した被測距装置5aと自分との間の距離を測定する。同様に、信号機3bに設置した測距装置4bは自動二輪車2bに搭載した被測距装置5bと自分との間の距離を測定する。
【0016】距離測定は、前述したように、あくまで測距装置4a〜4dの設置してある信号機が交通制御する道路側を進行する自動二輪車に搭載した被測距装置5a,5bとの間でなされるものとする。従って、測距装置4aが被測距装置5bとの間の距離を測定したり、測距装置4cが被測距装置5aとの間の距離を測定したりすることはない。そのような距離測定の選択は、測距装置4a〜4dから放出される電波に指向性を持たせ、測距装置4a〜4dの電源のON・OFF制御をすることで可能であるが、詳細は後述する。
【0017】さて、信号機に設置した測距装置4a〜4dは、前述したように、自動二輪車2a,2bに搭載した被測距装置5a,5bと自分との間の距離を測定するので、その結果から、信号機3a〜3dと自動二輪車2a,2bとの距離を検知することができる。そこで、その距離が、あらかじめ設定したある距離値より小さい場合は、自動二輪車2a,2bが交差点近傍に接近したと判断し、警告表示機6a〜6dに「自動二輪車の接近」という事態を文字または他のディスプレイによって表示させる。例えば、信号機3a,3bが「青」または「黄」の場合、測距装置4a,4bが作動して、測距装置4aと被測距装置5aの間の距離、および測距装置4bと被測距装置5bの間の距離を、それぞれ測定する。そして、測距装置4aと被測距装置5aの距離により信号機3aと自動二輪車2aの距離を検知し、その値があらかじめ設定したある値より小さい場合は警告表示機6a,6cに「自動二輪車の接近」という事態を表示する。同様に、測距装置4bと被測距装置5b間の距離測定の結果は、警告表示機6b,6dに表示する。そのようにすると、交差点において右折しようとしている自動車1aは、警告表示機6cの表示内容によって、自動車1d,1eの陰に隠れて見えない場所から進行してくる自動二輪車2aの接近を知ることができ、それとの衝突を回避できるので、いわゆる「右直事故」を防止することができる。また、交差点において左折しようとしている自動車1bは、警告表示機6bの表示内容によって、自車の死角にあって見えない場所を進行してくる自動二輪車2bの接近を知ることができ、それとの接触を回避できるので、いわゆる「左直事故」を防止することができる。同様に、警告表示機6aの表示内容によって自動車1dの左直事故を、また、警告表示機6dの表示内容によって自動車1cの右直事故を防止することもできる。一方、交差する道路での右直・左直事故は、信号機3c,3dが「青」または「黄」の揚合に測距装置4c,4dを作動させて測距を行い、測距装置4cの測距結果を警告表示機6b,6cに、測距装置4dの測距結果を警告表示機6a,6dに表示させれば、同様に防止することが可能である。
【0018】以上のように、本実施形態では、信号機に設置した測距装置で自動二輪車に搭載した被測距装置との間の距離を測定することにより、自動二輪車が交差点に接近したかどうかを判断し、その結果を警告表示機で自動車に警告することで、交差点における「右直事故」「左直事故」を防止することができる。
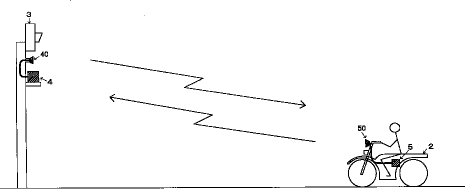
【0019】図2は、本実施形態による測距装置と被測距装置の配置例を示す。測距装置4a〜4dは被測距装置5a,5bとの間で互いに電波を送受信することによって距離を測定するものとする。よって、測距装置4a〜4d、被測距装置5a,5bともに、それぞれ電波の送受信アンテナを接続する。
【0020】その際、測距装置4は信号機3に設置されるが、測距装置4の送受信アンテナ40は信号機3のできるだけ上の位置に設置することが望ましい。測距装置4の送受信アンテナ40から見て、測距装置4の設置してある信号機3が交通制御する道路側を進行する自動二輪車2を、中間にできるだけ障害物のない位置から見通せるようにするためである。測距装置4の送受信アンテナ40が下の位置にあると、自動車・歩行者や標識または看板等で送受信アンテナ40からの電波が遮蔽される可能性があり、望ましくない。ただし、測距装置4の送受信アンテナ40の位置が信号機3の上の部分でなくても、上述した電波の遮蔽の可能性がない場所であれば、基本的に設置位置の制約をするものではない。
【0021】測距装置4の送受信アンテナ40は、測距装置4の設置してある信号機3が交通制御する道路側に電波を放射、および受信するように、指向性が持たされている。信号機3の後方や側方にある自動二輪車2とは電波の送受信を行わず、信号機3の前方(信号機が交通制御する道路側)にある自動二輪車2とのみ電波の送受信を行って測距を実行するためである。
【0022】また、被測距装置5は自動二輪車2に搭載されるが、被測距装置5の送受信アンテナ50は自動二輪車2の前方の位置に設置されるものとする。そしてさらに、被測距装置5の送受信アンテナ50は、自動二輪車2の前方に電波を放射、および受信するように、指向性が持たされている。
【0023】以上のように測距装置4の送受信アンテナ40と被測距装置5の送受信アンテナ50が配置されかつそれぞれ指向性が持たされていると、測距装置4はそれの設置してある信号機3が交通制御する道路側を進行する自動二輪車2に搭載されている被測距装置5との間でのみ電波を送受信するので、結果としてそのような道路側の自動二輪車と信号機間の距離を測定することが可能となる。
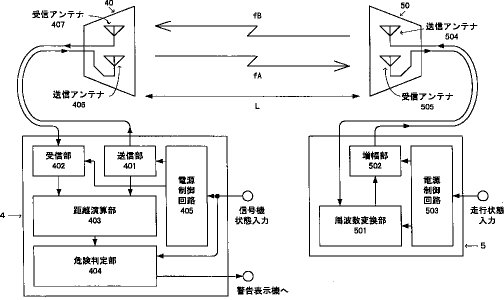
【0024】図3は、本実施形態による測距装置4と被測距装置5の構成例を示す。本システムでは、前述したように、測距装置4と被測距装置5との間で互いに電波を送受信することによって距離を測定する。
【0025】図3において、測距装置4から信号を電波として放射し、被測距装置5ではその信号を受信後周波数変換して電波として測距装置4に折り返す。そして、測距装置4では、その折り返し信号を受信して、信号の往復時間から、測距装置4と被測距装置5との間の距離を算出する。
【0026】測距装置4は送信部401、受信部402、距離演算部403、危険判定部404並びに電源制御回路405を備え、被測距装置5は周波数変換部501、増幅部502並びに電源制御回路503を備える。
【0027】測距装置4の送信部401では、特定の信号パターンによつて搬送波を変調し、変調後の信号を送信アンテナ406から電波として放射する。その電波は、被測距装置5の受信アンテナ505で受信され、その後、周波数変換部501において周波数を全体的に一定量だけシフトさせられる。例えば、測距装置4から放射された電波の搬送波の周波数をfAとすると、周波数変換部501では搬送波の周波数はfBにシフトさせられる(fA≠fB)。周波数変換後の信号は、増幅部502で増幅された後、送信アンテナ504から電波として放射される。その結果、被測距装置5は、測距装置4から放射された電波を周波数変換しさらに増幅して折り返す作用をする。
【0028】さて、そのように被測距装置5によって折り返された電波は、測距装置4の受信アンテナ407で受信されて受信部402に導かれる。受信部402では、受信信号をIF段(中間周波数段)またはベースバンドに変換してその信号を距離演算部403に送る。その際、受信部402では、前述した送信部401で発生した特定の信号パターンのべースバンドまたはIF段の信号が再生されることになる。ただし、その信号パターンは、送信部401で発生した時点より、測距装置4の送受信アンテナ40と被測距装置5の送受信アンテナ50間の距離Lを電波が往復する時間分だけ遅延した信号となる。
【0029】一方、送信部401からは、前述した特定の信号パターンのベースバンド信号またはIF段の信号が距離演算部403に導かれる。
【0030】そこで、距離演算部403では、受信部402から送られた信号パターンと、送信部401から送られた信号パターンを、ベースバンドまたはIF段で比較して、両者の遅延時間を検出し、その遅延時間から測距装置4と披測距装置5間の距離、正確には、測距装置4の送受信アンテナ40と被測距装置5の送受信アンテナ50の距離Lを演算によって求める。
【0031】なお、送信部401で発生する特定の信号パターンとしては、のこぎり波や、PNコード(Pseudo Noise:擬似雑音コード)を用いることができる。のこぎり波を用いる場合は、測距方式としては、いわゆるFM−CW方式による測距法になる。また、PNコードを用いる場合は、測距方式は、いわゆるスペクトル拡散方式(以下SS方式と略す)による測距法になる。
【0032】ただし、本発明では、上述した信号パターンを特に限定するものではない。よって、測距方式は、FM−CW方式であってもSS方式であってもよい。SS方式の場合は、本発明で用いる測距装置4・被測距装置5の測距を行う部分の具体例として、特開平5−297129号公報、或いは特願平11−210573号の明細書に示される装置を用いることが可能である。
【0033】本実施形態では、測距装置4が、危険判定部404と電源制御回路405とを備え、さらに被測距装置5が、電源制御回路503を備える。
【0034】測距装置4の危険判定部404は、距離演算部403で求めた距離Lを、あらかじめ設定した危険距離Dと比較し、LがDより小さい場合は被測距装置5を搭載した自動二輪車2が交差点近傍に接近したと判断して警告表示機6に危険信号を送信する。電源制御回路405は、測距装置4が設置してある信号機3の状態(青、黄、または赤)によって測距装置4の送信部401と受信部402の電源をON・OFFする。信号機の状態と電源のON・OFFの関係は、後述するフローチャートにおいて説明する。
【0035】また、被測距装置5の電源制御回路503は、それを搭載している自動二輪車2の走行状態(走行中か停止状態か)に応じて、被測距装置5の電源をON・OFF制御する。走行状態と電源のON・OFFの関係も、後述するフローチャートにおいて説明する。
【0036】本実施形態による測距装置4・被測距装置5の大きな特徴は、前述したように被測距装置5において測距装置4から送信された電波を周波数変換して折り返すことである。これは、測距装置4と被測距装置5の間でのみ測距が行われるようにするためである。
【0037】仮に、被測距装置5において周波数変換しない場合は、測距装置4においては被測距装置5以外の電波反射体からの反射電波と被測距装置5からの折り返し電波とを区別できない。そのような場合は、被測距装置5を自動二輪車2に搭載しても、周辺の自動車1や看板等からの反射電波を測距装置4が検出してそれらとの距離を測定してしまい、目的の自動二輪車2との正しい距離を測定できない結果となり得る。
【0038】本実施形態のように、被測距装置5で周波数変換すれば、周波数変換後の周波数帯のみを測距装置4で受信することにより、測距装置4から放出した電波の単なる反射信号を受信することがないので、単なる電波反射体と被測距装置5を区別して測距装置4と被測距装置5の間でのみ測距を行うことができる。その結果、被測距装置5を自動二輪車2に搭載することにより、周辺の自動車1や看板等の存在の影響を受けずに、測距装置4と自動二輪車2との距離を正しく測定することができる。
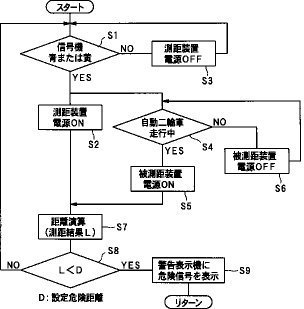
【0039】図4に示すフローチャートでは、信号機3の状態や自動二輪車2の走行状態に応じて、それぞれ測距装置4と被測距装置5の電源のON・OFFをどのようにおこなうか、また、どのような場合に測距と危険判定を行いその結果を警告表示するかを示している。
【0040】スタートした後、その信号機3が青または黄の状態にあるかを見て(S1)、信号機3が青かまたは黄の場合、信号機3に設置した測距装置4の電源がONされ(S2)、そうでない場合には、測距装置4の電源がOFFされる(S3)。すなわち、信号機3が赤の時は、測距装置4の電波がOFFとなって作動しないようにされる。信号機3が進行を許可している道路においてのみ、その信号機3に設置してある測距装置4とその道路を進行している自動二輪車2との距離を測定して危険判断するためである。
【0041】その際、その道路と交差している道路側の信号機3(赤になっている)に設置してある測距装置4は作動しないようにされるので、それから電波が放射されることはなく、また、その交差している道路側を進行している自動二輪車2があっても、それに搭載している被測距装置5からも電波が放射されることはない。測距装置4から電波が放射されないので被測距装置5からの折り返しの電波も放射されないためである。
【0042】従って、進行を許可している道路側の信号機3(青または黄になっている)に設置してある測距装置4では、交差する道路側の自動二輪車2からの電波を受信することはあり得ず、また、進行を許可している道路を進行する自動二輪車2に搭載している被測距装置5が、交差する道路側の信号機3に設置してある測距装置4からの電波を受信することもあり得ない。
【0043】つまり、信号機3の状態に応じて測距装置4の電源をON・OFFすることにより、測距装置4および被測距装置5が、交差する道路の間で互いに干渉することを防止することができる。これにより、距離測定は、測距装置4の設置してある信号機3が交通制御する道路側を進行する自動二輪車2と、その測距装置4間でのみ実行されることになる。
【0044】図4のS1において、信号機3が青または黄の場合、測距装置4の電源ON(S2)と同時に、自動二輪車2が走行中かを見て(S4)、その自動二輪車2が走行状態にある時は、自動二輪車2に搭載した被測距装置5が電源をONして作動され(S5)、自動二輪車2が停止している時は、被測距装置5が電源をOFFして作動させないようにされる(S6)。
【0045】これは、停止している自動二輪車2は自動車1との衝突の危険がないので、それとの距離を測定しないようにするためである。距離測定は、あくまで走行状態にあって衝突の可能性がある自動二輪車2と測距装置4間でのみおこなう必要がある。停止している自動二輪車2との距離測定をおこなうと、危険でない場合も不要な警告を自動車1に与えてしまう可能性があり、その場合は交通の流れのじゃまをして好ましくないからである。そこで、自動二輪車2が停止している場合は、搭載している被測距装置5の電源をOFFして測距装置4への折り返し電波を放射しないようにしている。
【0046】これによれば、信号機3が青または黄の時で、かつ自動二輪車2が走行状態の時に、距離演算(S7)がおこなわれる。
【0047】S7で距離演算をして得られた測距値をLとすると、Lの値は、あらかじめ設定した危険距離Dと比較され(S8)、LがDより小さい場合は自動二輪車2が交差点近傍に接近したと判断し、警告表示機6に危険信号を表示して自動車に衝突危険の警告を与える(S9)。
【0048】ここで、Dの値は、自動車1が右折・左折に要する時間内に自動二輪車2が交差点に進入する危険性があるような距離のうちの最大の値に選ばれる。ただし、その距離は、道路の制限速度や交差点の広さによって異なるので、Dの値は特に限定するものではない。なお、走行している自動二輪車2が複数の場合は、測距値Lの値も複数の値が得られるが、Dの値と比較するLの値は、複数のLのうち最小値のLの値とする。そのようにすると、交差点に最も近い自動二輪車2の距離を選択できるので、最も衝突の危険性が高い自動二輪車2が交差点近傍の危険距離以内に接近したかどうか判定でき、自動車事故を防ぐ上で間違いのない警告を与えることがる。
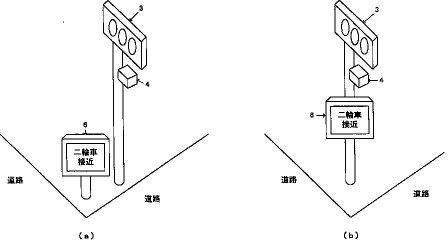
【0049】図5は、警告表示機6の例を示す。図5aは、信号機3の近傍に警告表示機6を設置した例であり、図5bは、信号機3自体に警告表示機6を設置した例である。警告表示機6の設置は、どちらの位置に設置してもよい。図5の例では、警告表示機6に表示する危険信号の例として、「二輪車接近」という文字で表示したが、これに限定されるものではなく、自動二輪車の接近という事態を警告するものであればよく、任意の文字で表示しても、図形や色などの他のディスプレイで表示してもかまわない。
【0050】図6は、別の実施形態を示す。この実施形態では、上記実施形態と比較し、警告手段が異なっている。すなわち、警告表示機6に危険信号を表示させる代わりに、自動車1に電波によって危険信号を伝達し、自動車1に搭載した音声警告装置によって音声で運転者に警告を与える。
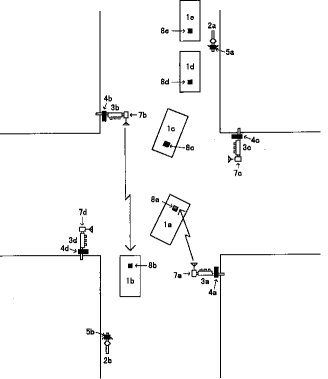
【0051】図6において、信号機3a〜3dには、それぞれ測距装置4a〜4dが設置されている。また、道路を進行する自動二輪車2a,2bには、それぞれ被測距装置5a,5bが搭載されている。さらに、各信号機3a〜3dには、それぞれ送信機7a〜7dが設置されている。
【0052】そして、道路を進行する自動車1a〜1eには、それぞれ受信機および音声警告装置8a〜8eが搭載されている。各信号機3に設置されている測距装置4は、その信号機3が交通制御する道路側を進行する自動二輪車2に搭載した被測距装置5と自分との間の距離を測定する。
【0053】測距装置4と被測距装置5間の距離測定に関する構成や、方法・動作は、前述した本実施形態とまったく同様である。すなわち、測距装置4と被測距装置5の配置は前述した図2のものと同様であり、測距装置4と被測距装置5の構成は前述した図3のものと同様である。よって、測距装置4と被測距装置5の間の距離測定の内容に関しては説明を省略する。
【0054】信号機3に設置した測距装置4は、上述したように、自動二輪車2に搭載した被測距装置5と自分との間の距離を測定するので、その結果から、信号機3と自動二輪車2との距離を検知することができる。
【0055】そこで、その距離が、あらかじめ設定したある距離値より小さい場合は、自動二輪車2が交差点近傍に接近したと判断し、そのような「自動二輪車の接近」という事態を自動車1の運転者に警告する。
【0056】この場合、電波によって自動車1に危険信号を伝達し、自動車1に搭載した音声警告装置8によって音声で運転者に警告を与える。
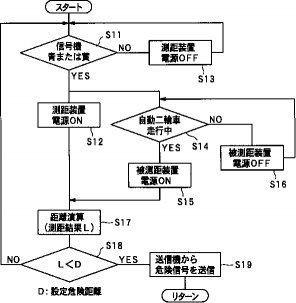
【0057】図7は、本実施形態のフロー処理を示している。ここでのS11〜S17の処理は、図4に示すS1〜S7の処理と同一処理である。信号機3a,3bが「青」または「黄」であって、自動二輪車2が走行状態にある時、S17では、測距装置4a,4bが作動して、測距装置4aと被測距装置5a間の距離、および測距装置4bと被測距装置5b間の距離を、それぞれ測定する。
【0058】そして、測距装置4aと被測距装置5aの距離により信号機3aと自動二輪車2aの距離Lを検知し、その値とあらかじめ設定したある値Dとを比較する(S18)。その値があらかじめ設定したある値より小さい場合は、信号機3aに設置した送信機7aから危険信号を電波として送信する(S19)。そして自動車1aに搭載した受信機および音声警告装置8aの受信機で上述した電波を受信した場合は、音声警告装置8aによって「自動二輪車の接近」という事態を音声で自動車1aの運転者に警告する。
【0059】そのようにすると、交差点において右折しようとしている自動車1aの運転者は、音声による警告で自動二輪車2aの接近を知ることができ、「右直事故」を回避することができる。
【0060】同様に、測距装置4bと被測距装置5b間の測距値があらかじめ設定したある値より小さい場合は、信号機3bに設置した送信機7bから危険信号を電波として送信する(S19)。そして自動車1bに搭載した受信機および音声警告装置8bの受信機で上述した電波を受信した場合は、やはり音声警告装置8bによって「自動二輪車の接近」という事態を音声で運転者に警告する。その場合は、交差点において左折しようとしている自動車1bの運転者が音声で警告されるので、「左直事故」を回避することができる。
【0061】なお、送信機7aから送信された電波を自動車1dに搭載した受信機および音声警告装置8dで受信して警告することにより自動車1dの左直事故を、また、送信機7bから送信された電波を自動車1cに搭載した受信機および音声警告装置8cで受信して警告することにより自動車1cの右直事故を回避することもできる。一方、交差する道路での右直事故・左直事故は、信号機3c,3dが「青」または「黄」の場合に測距装置4c,4dを作動させて測距を行い、測距装置4cの測距結果に応じて危険信号を送信機7cから送信し、測距装置4dの測距結果に応じて危険信号を送信機7dから送信すれば、同様に防止・回避することが可能である。
【0062】以上のように、本実施形態では、信号機3に設置した測距装置4で自動二輪車2に搭載した被測距装置5との間の距離を測定することにより、自動二輪車2が交差点に接近したかどうかを判断し、その結果を信号機3に設置した送信機7から電波により自動車1に伝達して警告を与えることで、交差点における「右直事故」「左直事故」を防止できる。
【0063】音声による警告は、音声合成による言葉によってもよいし、単なる警告音であってもよい。このような実施形態では、前述した実施形態と比べて、自動車1に受信機と音声警告装置8を搭載する必要がある点がコスト的に不利であるが、自動車1の運転者に対して、視線を変えさせずに、音声で確実に警告を与えられる点で有利である。
【0064】
【発明の効果】本発明によれば、交差点内における、車両間の右直事故や左直事故等の衝突事故の発生を抑制することができる。
【図面の簡単な説明】
【図1】本発明による交通制御システムの一実施形態を示す図である。
【図2】測距装置と被測距装置の配置例を示す図である。
【図3】測距装置と被測距装置の構成例を示す図である。
【図4】本実施形態によるフローチャートである。
【図5】警告表示機の例示す図である。
【図6】交通制御システムの別の実施形態を示す図である。
【図7】同じくフローチャートである。
【図8】従来の交通制御システムを示す図である。
【符号の説明】
1a,1b,1c,1d,1e 自動車
2a,2b 自動二輪車
3a,3b,3c,3d 信号機
4a,4b,4c,4d 測距装置
5a,5b 被測距装置
6a,6b,6c,6d 警告表示機
【0001】
【発明の属する技術分野】本発明は、交差点での交通事故を防止する交通制御システムに関する。
【0002】
【従来の技術】図8は、交差点における従来の交通制御システムを示す。従来の方法では、信号機3a,3b,3c,3dの信号灯を、青・黄・赤のどれかの色のものが点灯するように制御して、自動車・自動二輪車・歩行者等に進行、停止の命令を与えるように構成されている。
【0003】
【発明が解決しようとする課題】しかしながら、従来の構成では、自動車と自動二輪車の衝突事故を防止するのが困難な場合がある。例えば、信号機3a,3bが青または黄の場合、右折しようとしている自動車1aは、他の自動車1d,1eの陰に隠れて見えない場所を進行してくる自動二輪車2aの存在に気づかずに右折してしまい、交差点内でその自動二輪車と衝突事故をおこす可能性がある(右直事故)。また、左折しようとしている自動車1bは、自車の死角にあって見えない場所を進行してくる自動二輪車2bの存在に気づかずに左折してしまい、その自動二輪車と巻き込み事故や接触事故をおこす可能性がある(左直事故)。
【0004】従来の交通制御システムでは、単に、全体の交通の進行、停止の命令を与えるだけで、右直事故や左直事故が起こり得ることの注意を喚起する機能が無く、上記のような自動車と自動二輪車の衝突事故防止には無力であるという、問題点がある。このような自動車と自動二輪車の衝突事故の場合、自動二輪車の運転者の死亡や重傷等の重大事故にいたる場合が多く、そのような事故を防止することが社会的に強く要請されている。
【0005】そこで、本発明の目的は、交差点内での車両間の衝突事故を防止する、交通制御システムを提供することにある。
【0006】
【課題を解決するための手段】請求項1記載の発明は、交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、自車に警告を発する手段を備えた、ことを特徴とする。
【0007】請求項2記載の発明は、交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、前記信号機の近傍または信号機自体に警告表示機を設置し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、警告表示機に警告表示を行う手段を備えた、ことを特徴とする。
【0008】請求項3記載の発明は、交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置及び送信機を設置し、交差点に進入する車両に被測距装置を搭載し、自車に受信機及び音声警告装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、信号機に設置した送信機から自車の受信機に危険信号を送信し、自車の音声警告装置が危険を音声出力する、ことを特徴とする。
【0009】請求項4記載の発明は、請求項1〜3のいずれかに記載のものにおいて、測距装置が、被測距装置との間で電波を送受信して、この信号の往復時間から距離を算出することを特徴とする。
【0010】請求項5記載の発明は、請求項1〜4のいずれかに記載のものにおいて、信号機が青または黄の時、信号機に設置した測距装置の電源をONし、信号機が赤の時は当該電源をOFFすることを特徴とする。
【0011】請求項6記載の発明は、請求項1〜5のいずれかに記載のものにおいて、車両が走行状態にある時、車両に搭載した被測距装置の電源をONし、車両が停止している時は当該電源をOFFすることを特徴とする。
【0012】請求項7記載の発明は、請求項1〜6のいずれかに記載のものにおいて、被測距装置を搭載した車両が自動二輪車であることを特徴とする。
【0013】
【発明の実施の形態】以下、本発明の一実施形態を添付の図面を参照して説明する。
【0014】図1は、本実施形態による交通制御システムを示し、1a,1b,1c,1d,1eは自動車を示している。交差点の信号機3a,3b,3c,3dには、それぞれ測距装置4a,4b,4c,4dが設置されている。また、道路を進行する自動二輪車2a,2bには、それぞれ被測距装置5a,5bが搭載されている。さらに、各信号機3a〜3dの近傍または信号機自体に、それぞれ警告表示機6a,6b,6c,6dが設置されている。
【0015】各信号機3a〜3dに設置されている測距装置4a〜4dは、その信号機が交通制御する道路側を進行する自動二輪車に搭載された被測距装置と自分との間の距離を測定するものとする。例えば、信号機3aに設置した測距装置4aは自動二輪車2aに搭載した被測距装置5aと自分との間の距離を測定する。同様に、信号機3bに設置した測距装置4bは自動二輪車2bに搭載した被測距装置5bと自分との間の距離を測定する。
【0016】距離測定は、前述したように、あくまで測距装置4a〜4dの設置してある信号機が交通制御する道路側を進行する自動二輪車に搭載した被測距装置5a,5bとの間でなされるものとする。従って、測距装置4aが被測距装置5bとの間の距離を測定したり、測距装置4cが被測距装置5aとの間の距離を測定したりすることはない。そのような距離測定の選択は、測距装置4a〜4dから放出される電波に指向性を持たせ、測距装置4a〜4dの電源のON・OFF制御をすることで可能であるが、詳細は後述する。
【0017】さて、信号機に設置した測距装置4a〜4dは、前述したように、自動二輪車2a,2bに搭載した被測距装置5a,5bと自分との間の距離を測定するので、その結果から、信号機3a〜3dと自動二輪車2a,2bとの距離を検知することができる。そこで、その距離が、あらかじめ設定したある距離値より小さい場合は、自動二輪車2a,2bが交差点近傍に接近したと判断し、警告表示機6a〜6dに「自動二輪車の接近」という事態を文字または他のディスプレイによって表示させる。例えば、信号機3a,3bが「青」または「黄」の場合、測距装置4a,4bが作動して、測距装置4aと被測距装置5aの間の距離、および測距装置4bと被測距装置5bの間の距離を、それぞれ測定する。そして、測距装置4aと被測距装置5aの距離により信号機3aと自動二輪車2aの距離を検知し、その値があらかじめ設定したある値より小さい場合は警告表示機6a,6cに「自動二輪車の接近」という事態を表示する。同様に、測距装置4bと被測距装置5b間の距離測定の結果は、警告表示機6b,6dに表示する。そのようにすると、交差点において右折しようとしている自動車1aは、警告表示機6cの表示内容によって、自動車1d,1eの陰に隠れて見えない場所から進行してくる自動二輪車2aの接近を知ることができ、それとの衝突を回避できるので、いわゆる「右直事故」を防止することができる。また、交差点において左折しようとしている自動車1bは、警告表示機6bの表示内容によって、自車の死角にあって見えない場所を進行してくる自動二輪車2bの接近を知ることができ、それとの接触を回避できるので、いわゆる「左直事故」を防止することができる。同様に、警告表示機6aの表示内容によって自動車1dの左直事故を、また、警告表示機6dの表示内容によって自動車1cの右直事故を防止することもできる。一方、交差する道路での右直・左直事故は、信号機3c,3dが「青」または「黄」の揚合に測距装置4c,4dを作動させて測距を行い、測距装置4cの測距結果を警告表示機6b,6cに、測距装置4dの測距結果を警告表示機6a,6dに表示させれば、同様に防止することが可能である。
【0018】以上のように、本実施形態では、信号機に設置した測距装置で自動二輪車に搭載した被測距装置との間の距離を測定することにより、自動二輪車が交差点に接近したかどうかを判断し、その結果を警告表示機で自動車に警告することで、交差点における「右直事故」「左直事故」を防止することができる。
【0019】図2は、本実施形態による測距装置と被測距装置の配置例を示す。測距装置4a〜4dは被測距装置5a,5bとの間で互いに電波を送受信することによって距離を測定するものとする。よって、測距装置4a〜4d、被測距装置5a,5bともに、それぞれ電波の送受信アンテナを接続する。
【0020】その際、測距装置4は信号機3に設置されるが、測距装置4の送受信アンテナ40は信号機3のできるだけ上の位置に設置することが望ましい。測距装置4の送受信アンテナ40から見て、測距装置4の設置してある信号機3が交通制御する道路側を進行する自動二輪車2を、中間にできるだけ障害物のない位置から見通せるようにするためである。測距装置4の送受信アンテナ40が下の位置にあると、自動車・歩行者や標識または看板等で送受信アンテナ40からの電波が遮蔽される可能性があり、望ましくない。ただし、測距装置4の送受信アンテナ40の位置が信号機3の上の部分でなくても、上述した電波の遮蔽の可能性がない場所であれば、基本的に設置位置の制約をするものではない。
【0021】測距装置4の送受信アンテナ40は、測距装置4の設置してある信号機3が交通制御する道路側に電波を放射、および受信するように、指向性が持たされている。信号機3の後方や側方にある自動二輪車2とは電波の送受信を行わず、信号機3の前方(信号機が交通制御する道路側)にある自動二輪車2とのみ電波の送受信を行って測距を実行するためである。
【0022】また、被測距装置5は自動二輪車2に搭載されるが、被測距装置5の送受信アンテナ50は自動二輪車2の前方の位置に設置されるものとする。そしてさらに、被測距装置5の送受信アンテナ50は、自動二輪車2の前方に電波を放射、および受信するように、指向性が持たされている。
【0023】以上のように測距装置4の送受信アンテナ40と被測距装置5の送受信アンテナ50が配置されかつそれぞれ指向性が持たされていると、測距装置4はそれの設置してある信号機3が交通制御する道路側を進行する自動二輪車2に搭載されている被測距装置5との間でのみ電波を送受信するので、結果としてそのような道路側の自動二輪車と信号機間の距離を測定することが可能となる。
【0024】図3は、本実施形態による測距装置4と被測距装置5の構成例を示す。本システムでは、前述したように、測距装置4と被測距装置5との間で互いに電波を送受信することによって距離を測定する。
【0025】図3において、測距装置4から信号を電波として放射し、被測距装置5ではその信号を受信後周波数変換して電波として測距装置4に折り返す。そして、測距装置4では、その折り返し信号を受信して、信号の往復時間から、測距装置4と被測距装置5との間の距離を算出する。
【0026】測距装置4は送信部401、受信部402、距離演算部403、危険判定部404並びに電源制御回路405を備え、被測距装置5は周波数変換部501、増幅部502並びに電源制御回路503を備える。
【0027】測距装置4の送信部401では、特定の信号パターンによつて搬送波を変調し、変調後の信号を送信アンテナ406から電波として放射する。その電波は、被測距装置5の受信アンテナ505で受信され、その後、周波数変換部501において周波数を全体的に一定量だけシフトさせられる。例えば、測距装置4から放射された電波の搬送波の周波数をfAとすると、周波数変換部501では搬送波の周波数はfBにシフトさせられる(fA≠fB)。周波数変換後の信号は、増幅部502で増幅された後、送信アンテナ504から電波として放射される。その結果、被測距装置5は、測距装置4から放射された電波を周波数変換しさらに増幅して折り返す作用をする。
【0028】さて、そのように被測距装置5によって折り返された電波は、測距装置4の受信アンテナ407で受信されて受信部402に導かれる。受信部402では、受信信号をIF段(中間周波数段)またはベースバンドに変換してその信号を距離演算部403に送る。その際、受信部402では、前述した送信部401で発生した特定の信号パターンのべースバンドまたはIF段の信号が再生されることになる。ただし、その信号パターンは、送信部401で発生した時点より、測距装置4の送受信アンテナ40と被測距装置5の送受信アンテナ50間の距離Lを電波が往復する時間分だけ遅延した信号となる。
【0029】一方、送信部401からは、前述した特定の信号パターンのベースバンド信号またはIF段の信号が距離演算部403に導かれる。
【0030】そこで、距離演算部403では、受信部402から送られた信号パターンと、送信部401から送られた信号パターンを、ベースバンドまたはIF段で比較して、両者の遅延時間を検出し、その遅延時間から測距装置4と披測距装置5間の距離、正確には、測距装置4の送受信アンテナ40と被測距装置5の送受信アンテナ50の距離Lを演算によって求める。
【0031】なお、送信部401で発生する特定の信号パターンとしては、のこぎり波や、PNコード(Pseudo Noise:擬似雑音コード)を用いることができる。のこぎり波を用いる場合は、測距方式としては、いわゆるFM−CW方式による測距法になる。また、PNコードを用いる場合は、測距方式は、いわゆるスペクトル拡散方式(以下SS方式と略す)による測距法になる。
【0032】ただし、本発明では、上述した信号パターンを特に限定するものではない。よって、測距方式は、FM−CW方式であってもSS方式であってもよい。SS方式の場合は、本発明で用いる測距装置4・被測距装置5の測距を行う部分の具体例として、特開平5−297129号公報、或いは特願平11−210573号の明細書に示される装置を用いることが可能である。
【0033】本実施形態では、測距装置4が、危険判定部404と電源制御回路405とを備え、さらに被測距装置5が、電源制御回路503を備える。
【0034】測距装置4の危険判定部404は、距離演算部403で求めた距離Lを、あらかじめ設定した危険距離Dと比較し、LがDより小さい場合は被測距装置5を搭載した自動二輪車2が交差点近傍に接近したと判断して警告表示機6に危険信号を送信する。電源制御回路405は、測距装置4が設置してある信号機3の状態(青、黄、または赤)によって測距装置4の送信部401と受信部402の電源をON・OFFする。信号機の状態と電源のON・OFFの関係は、後述するフローチャートにおいて説明する。
【0035】また、被測距装置5の電源制御回路503は、それを搭載している自動二輪車2の走行状態(走行中か停止状態か)に応じて、被測距装置5の電源をON・OFF制御する。走行状態と電源のON・OFFの関係も、後述するフローチャートにおいて説明する。
【0036】本実施形態による測距装置4・被測距装置5の大きな特徴は、前述したように被測距装置5において測距装置4から送信された電波を周波数変換して折り返すことである。これは、測距装置4と被測距装置5の間でのみ測距が行われるようにするためである。
【0037】仮に、被測距装置5において周波数変換しない場合は、測距装置4においては被測距装置5以外の電波反射体からの反射電波と被測距装置5からの折り返し電波とを区別できない。そのような場合は、被測距装置5を自動二輪車2に搭載しても、周辺の自動車1や看板等からの反射電波を測距装置4が検出してそれらとの距離を測定してしまい、目的の自動二輪車2との正しい距離を測定できない結果となり得る。
【0038】本実施形態のように、被測距装置5で周波数変換すれば、周波数変換後の周波数帯のみを測距装置4で受信することにより、測距装置4から放出した電波の単なる反射信号を受信することがないので、単なる電波反射体と被測距装置5を区別して測距装置4と被測距装置5の間でのみ測距を行うことができる。その結果、被測距装置5を自動二輪車2に搭載することにより、周辺の自動車1や看板等の存在の影響を受けずに、測距装置4と自動二輪車2との距離を正しく測定することができる。
【0039】図4に示すフローチャートでは、信号機3の状態や自動二輪車2の走行状態に応じて、それぞれ測距装置4と被測距装置5の電源のON・OFFをどのようにおこなうか、また、どのような場合に測距と危険判定を行いその結果を警告表示するかを示している。
【0040】スタートした後、その信号機3が青または黄の状態にあるかを見て(S1)、信号機3が青かまたは黄の場合、信号機3に設置した測距装置4の電源がONされ(S2)、そうでない場合には、測距装置4の電源がOFFされる(S3)。すなわち、信号機3が赤の時は、測距装置4の電波がOFFとなって作動しないようにされる。信号機3が進行を許可している道路においてのみ、その信号機3に設置してある測距装置4とその道路を進行している自動二輪車2との距離を測定して危険判断するためである。
【0041】その際、その道路と交差している道路側の信号機3(赤になっている)に設置してある測距装置4は作動しないようにされるので、それから電波が放射されることはなく、また、その交差している道路側を進行している自動二輪車2があっても、それに搭載している被測距装置5からも電波が放射されることはない。測距装置4から電波が放射されないので被測距装置5からの折り返しの電波も放射されないためである。
【0042】従って、進行を許可している道路側の信号機3(青または黄になっている)に設置してある測距装置4では、交差する道路側の自動二輪車2からの電波を受信することはあり得ず、また、進行を許可している道路を進行する自動二輪車2に搭載している被測距装置5が、交差する道路側の信号機3に設置してある測距装置4からの電波を受信することもあり得ない。
【0043】つまり、信号機3の状態に応じて測距装置4の電源をON・OFFすることにより、測距装置4および被測距装置5が、交差する道路の間で互いに干渉することを防止することができる。これにより、距離測定は、測距装置4の設置してある信号機3が交通制御する道路側を進行する自動二輪車2と、その測距装置4間でのみ実行されることになる。
【0044】図4のS1において、信号機3が青または黄の場合、測距装置4の電源ON(S2)と同時に、自動二輪車2が走行中かを見て(S4)、その自動二輪車2が走行状態にある時は、自動二輪車2に搭載した被測距装置5が電源をONして作動され(S5)、自動二輪車2が停止している時は、被測距装置5が電源をOFFして作動させないようにされる(S6)。
【0045】これは、停止している自動二輪車2は自動車1との衝突の危険がないので、それとの距離を測定しないようにするためである。距離測定は、あくまで走行状態にあって衝突の可能性がある自動二輪車2と測距装置4間でのみおこなう必要がある。停止している自動二輪車2との距離測定をおこなうと、危険でない場合も不要な警告を自動車1に与えてしまう可能性があり、その場合は交通の流れのじゃまをして好ましくないからである。そこで、自動二輪車2が停止している場合は、搭載している被測距装置5の電源をOFFして測距装置4への折り返し電波を放射しないようにしている。
【0046】これによれば、信号機3が青または黄の時で、かつ自動二輪車2が走行状態の時に、距離演算(S7)がおこなわれる。
【0047】S7で距離演算をして得られた測距値をLとすると、Lの値は、あらかじめ設定した危険距離Dと比較され(S8)、LがDより小さい場合は自動二輪車2が交差点近傍に接近したと判断し、警告表示機6に危険信号を表示して自動車に衝突危険の警告を与える(S9)。
【0048】ここで、Dの値は、自動車1が右折・左折に要する時間内に自動二輪車2が交差点に進入する危険性があるような距離のうちの最大の値に選ばれる。ただし、その距離は、道路の制限速度や交差点の広さによって異なるので、Dの値は特に限定するものではない。なお、走行している自動二輪車2が複数の場合は、測距値Lの値も複数の値が得られるが、Dの値と比較するLの値は、複数のLのうち最小値のLの値とする。そのようにすると、交差点に最も近い自動二輪車2の距離を選択できるので、最も衝突の危険性が高い自動二輪車2が交差点近傍の危険距離以内に接近したかどうか判定でき、自動車事故を防ぐ上で間違いのない警告を与えることがる。
【0049】図5は、警告表示機6の例を示す。図5aは、信号機3の近傍に警告表示機6を設置した例であり、図5bは、信号機3自体に警告表示機6を設置した例である。警告表示機6の設置は、どちらの位置に設置してもよい。図5の例では、警告表示機6に表示する危険信号の例として、「二輪車接近」という文字で表示したが、これに限定されるものではなく、自動二輪車の接近という事態を警告するものであればよく、任意の文字で表示しても、図形や色などの他のディスプレイで表示してもかまわない。
【0050】図6は、別の実施形態を示す。この実施形態では、上記実施形態と比較し、警告手段が異なっている。すなわち、警告表示機6に危険信号を表示させる代わりに、自動車1に電波によって危険信号を伝達し、自動車1に搭載した音声警告装置によって音声で運転者に警告を与える。
【0051】図6において、信号機3a〜3dには、それぞれ測距装置4a〜4dが設置されている。また、道路を進行する自動二輪車2a,2bには、それぞれ被測距装置5a,5bが搭載されている。さらに、各信号機3a〜3dには、それぞれ送信機7a〜7dが設置されている。
【0052】そして、道路を進行する自動車1a〜1eには、それぞれ受信機および音声警告装置8a〜8eが搭載されている。各信号機3に設置されている測距装置4は、その信号機3が交通制御する道路側を進行する自動二輪車2に搭載した被測距装置5と自分との間の距離を測定する。
【0053】測距装置4と被測距装置5間の距離測定に関する構成や、方法・動作は、前述した本実施形態とまったく同様である。すなわち、測距装置4と被測距装置5の配置は前述した図2のものと同様であり、測距装置4と被測距装置5の構成は前述した図3のものと同様である。よって、測距装置4と被測距装置5の間の距離測定の内容に関しては説明を省略する。
【0054】信号機3に設置した測距装置4は、上述したように、自動二輪車2に搭載した被測距装置5と自分との間の距離を測定するので、その結果から、信号機3と自動二輪車2との距離を検知することができる。
【0055】そこで、その距離が、あらかじめ設定したある距離値より小さい場合は、自動二輪車2が交差点近傍に接近したと判断し、そのような「自動二輪車の接近」という事態を自動車1の運転者に警告する。
【0056】この場合、電波によって自動車1に危険信号を伝達し、自動車1に搭載した音声警告装置8によって音声で運転者に警告を与える。
【0057】図7は、本実施形態のフロー処理を示している。ここでのS11〜S17の処理は、図4に示すS1〜S7の処理と同一処理である。信号機3a,3bが「青」または「黄」であって、自動二輪車2が走行状態にある時、S17では、測距装置4a,4bが作動して、測距装置4aと被測距装置5a間の距離、および測距装置4bと被測距装置5b間の距離を、それぞれ測定する。
【0058】そして、測距装置4aと被測距装置5aの距離により信号機3aと自動二輪車2aの距離Lを検知し、その値とあらかじめ設定したある値Dとを比較する(S18)。その値があらかじめ設定したある値より小さい場合は、信号機3aに設置した送信機7aから危険信号を電波として送信する(S19)。そして自動車1aに搭載した受信機および音声警告装置8aの受信機で上述した電波を受信した場合は、音声警告装置8aによって「自動二輪車の接近」という事態を音声で自動車1aの運転者に警告する。
【0059】そのようにすると、交差点において右折しようとしている自動車1aの運転者は、音声による警告で自動二輪車2aの接近を知ることができ、「右直事故」を回避することができる。
【0060】同様に、測距装置4bと被測距装置5b間の測距値があらかじめ設定したある値より小さい場合は、信号機3bに設置した送信機7bから危険信号を電波として送信する(S19)。そして自動車1bに搭載した受信機および音声警告装置8bの受信機で上述した電波を受信した場合は、やはり音声警告装置8bによって「自動二輪車の接近」という事態を音声で運転者に警告する。その場合は、交差点において左折しようとしている自動車1bの運転者が音声で警告されるので、「左直事故」を回避することができる。
【0061】なお、送信機7aから送信された電波を自動車1dに搭載した受信機および音声警告装置8dで受信して警告することにより自動車1dの左直事故を、また、送信機7bから送信された電波を自動車1cに搭載した受信機および音声警告装置8cで受信して警告することにより自動車1cの右直事故を回避することもできる。一方、交差する道路での右直事故・左直事故は、信号機3c,3dが「青」または「黄」の場合に測距装置4c,4dを作動させて測距を行い、測距装置4cの測距結果に応じて危険信号を送信機7cから送信し、測距装置4dの測距結果に応じて危険信号を送信機7dから送信すれば、同様に防止・回避することが可能である。
【0062】以上のように、本実施形態では、信号機3に設置した測距装置4で自動二輪車2に搭載した被測距装置5との間の距離を測定することにより、自動二輪車2が交差点に接近したかどうかを判断し、その結果を信号機3に設置した送信機7から電波により自動車1に伝達して警告を与えることで、交差点における「右直事故」「左直事故」を防止できる。
【0063】音声による警告は、音声合成による言葉によってもよいし、単なる警告音であってもよい。このような実施形態では、前述した実施形態と比べて、自動車1に受信機と音声警告装置8を搭載する必要がある点がコスト的に不利であるが、自動車1の運転者に対して、視線を変えさせずに、音声で確実に警告を与えられる点で有利である。
【0064】
【発明の効果】本発明によれば、交差点内における、車両間の右直事故や左直事故等の衝突事故の発生を抑制することができる。
【図面の簡単な説明】
【図1】本発明による交通制御システムの一実施形態を示す図である。
【図2】測距装置と被測距装置の配置例を示す図である。
【図3】測距装置と被測距装置の構成例を示す図である。
【図4】本実施形態によるフローチャートである。
【図5】警告表示機の例示す図である。
【図6】交通制御システムの別の実施形態を示す図である。
【図7】同じくフローチャートである。
【図8】従来の交通制御システムを示す図である。
【符号の説明】
1a,1b,1c,1d,1e 自動車
2a,2b 自動二輪車
3a,3b,3c,3d 信号機
4a,4b,4c,4d 測距装置
5a,5b 被測距装置
6a,6b,6c,6d 警告表示機
【特許請求の範囲】
【請求項1】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、自車に警告を発する手段を備えた、ことを特徴とする交通制御システム。
【請求項2】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、前記信号機の近傍または信号機自体に警告表示機を設置し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、警告表示機に警告表示を行う手段を備えた、ことを特徴とする交通制御システム。
【請求項3】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置及び送信機を設置し、交差点に進入する車両に被測距装置を搭載し、自車に受信機及び音声警告装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、信号機に設置した送信機から自車の受信機に危険信号を送信し、自車の音声警告装置が危険を音声出力する、ことを特徴とする交通制御システム。
【請求項4】 前記測距装置が、被測距装置との間で電波を送受信して、この信号の往復時間から距離を算出する、ことを特徴とする請求項1〜3のいずれかに記載の交通制御システム。
【請求項5】 前記信号機が青または黄の時、信号機に設置した測距装置の電源をONし、信号機が赤の時は当該電源をOFFする、ことを特徴とする請求項1〜4のいずれかに記載の交通制御システム。
【請求項6】 前記車両が走行状態にある時、車両に搭載した被測距装置の電源をONし、車両が停止している時は当該電源をOFFする、ことを特徴とする請求項1〜5のいずれかに記載の交通制御システム。
【請求項7】 前記被測距装置を搭載した車両が自動二輪車である、ことを特徴とする請求項1〜6のいずれかに記載の交通制御システム。
【請求項1】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、自車に警告を発する手段を備えた、ことを特徴とする交通制御システム。
【請求項2】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置を設置し、交差点に進入する車両に被測距装置を搭載し、前記信号機の近傍または信号機自体に警告表示機を設置し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、警告表示機に警告表示を行う手段を備えた、ことを特徴とする交通制御システム。
【請求項3】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機に測距装置及び送信機を設置し、交差点に進入する車両に被測距装置を搭載し、自車に受信機及び音声警告装置を搭載し、信号機に設置した測距装置が、交差点に接近した自車以外の車両と信号機との距離を測定し、交差点に自車以外の車両が所定距離まで接近した場合、信号機に設置した送信機から自車の受信機に危険信号を送信し、自車の音声警告装置が危険を音声出力する、ことを特徴とする交通制御システム。
【請求項4】 前記測距装置が、被測距装置との間で電波を送受信して、この信号の往復時間から距離を算出する、ことを特徴とする請求項1〜3のいずれかに記載の交通制御システム。
【請求項5】 前記信号機が青または黄の時、信号機に設置した測距装置の電源をONし、信号機が赤の時は当該電源をOFFする、ことを特徴とする請求項1〜4のいずれかに記載の交通制御システム。
【請求項6】 前記車両が走行状態にある時、車両に搭載した被測距装置の電源をONし、車両が停止している時は当該電源をOFFする、ことを特徴とする請求項1〜5のいずれかに記載の交通制御システム。
【請求項7】 前記被測距装置を搭載した車両が自動二輪車である、ことを特徴とする請求項1〜6のいずれかに記載の交通制御システム。
【図1】


【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2001−167395(P2001−167395A)
【公開日】平成13年6月22日(2001.6.22)
【国際特許分類】
【出願番号】特願平11−346222
【出願日】平成11年12月6日(1999.12.6)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成13年6月22日(2001.6.22)
【国際特許分類】
【出願日】平成11年12月6日(1999.12.6)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]