
交通制御方法
【課題】「交差点無停止走行制御システム」の特性を生かしつつ交通量に即したリアルタイム信号制御により渋滞発生の頻度を低減する交通制御方法の提供。
【解決手段】「交差点無停止走行制御システム」適用によって、交差点Aの青信号期間t2a〜t3aに交差点Aに到着・通過するべく制御される地点Pの時刻t1p〜t3p間の通過車両中一部期間t1p〜t2q内に通過する車両数を計数し、その計数結果から交差点Aでの前記特定青信号期間での渋滞発生を予測し、予測された渋滞の程度に対応した時間幅ΔTで交差点Aのスプリット制御をおこなう。但し、時刻t2qは、交差点Aにおける道路Rp側青信号期間t2a〜t3aに継続する道路Rq側青信号期間t3a〜t4aに交差点Aを通過すべく道路Rq上地点Qを通過する車両の通過開始時刻である。
【解決手段】「交差点無停止走行制御システム」適用によって、交差点Aの青信号期間t2a〜t3aに交差点Aに到着・通過するべく制御される地点Pの時刻t1p〜t3p間の通過車両中一部期間t1p〜t2q内に通過する車両数を計数し、その計数結果から交差点Aでの前記特定青信号期間での渋滞発生を予測し、予測された渋滞の程度に対応した時間幅ΔTで交差点Aのスプリット制御をおこなう。但し、時刻t2qは、交差点Aにおける道路Rp側青信号期間t2a〜t3aに継続する道路Rq側青信号期間t3a〜t4aに交差点Aを通過すべく道路Rq上地点Qを通過する車両の通過開始時刻である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の交差点への走行速度を適切に制御することによって交差点を青信号で通過する「交差点無停止走行制御システム」の特性を生かしつつ交通量にリアルタイムに対応することによって渋滞の予防・低減を行う交通信号制御方法に関する。
【背景技術】
【0002】
交差点での車両の停止回数を低減することによって、車両の省エネルギー、排出ガス削減を図る「交差点無停止走行制御システム」が提案されている。これは 交差点Aにいたる道路上交差点Aから一定距離D上流の地点Pにおいて、交差点Aの信号状態情報、車両の地点P通過時刻、車両走行距離D情報、および地点Pから交差点Aまでの間の許容最高走行速度Vmax情報、から車両が交差点Aを青信号・無停止で通過するための地点Pから交差点Aまでの走行条件即ち車両の地点P通過時刻 tp に対応する交差点A到着時刻 ta 、推奨所要時間 topt および推奨走行速度 vopt を算出し、前記算出された推奨走行速度 vopt 等の走行条件 に基づいて車両を地点P−交差点A間を走行させ交差点Aを青信号・無停止で通過させるものである(特許文献1、特許文献2、特許文献3)。
【0003】
前記「交差点無停止走行制御システム」においては、交通量が比較的少ない場合には期待される効果が充分発揮されるが、交通量が多くなると前記地点P−交差点A間における車両走行速度の低減化等に起因する渋滞発生の恐れが生じる。
即ち、車両の省エネルギー化、排出ガス低減化とあわせて地点P−交差点A間のスムースな走行を期待すべき「交差点無停止走行制御システム」によって新たな渋滞原因が発生してしまうことになる。
【0004】
一方主として交差点における渋滞解消策として、「プロファイル信号制御方式」がある。これは交差点上流の車両感知器で車両の量や速度を計測しその結果に基づいて渋滞の予測を行い下流にある交差点の信号機をリアルタイムに且つ最適に制御しようとするものである(非特許文献1)。
【0005】
【特許文献1】特開2006−031573
【特許文献2】特開2006−251836
【特許文献3】特願2006−356940
【非特許文献1】田島昭幸・小林雅文「次世代信号制御方式の開発と実証実験」SEIテクニカルレビュー・第166号
【発明の開示】
【発明が解決しようとする課題】
【0006】
前記「交差点無停止走行制御システム」が採用されている交差点に前記「プロファイル信号制御方式」のごときリアルタイム信号制御方式を適用しようとすると、下記に示すごとく「交差点無停止走行制御」が正常に行えなくなる恐れがでてくる。
本願発明は上記問題を「交差点無停止走行制御システム」に最適化した渋滞予測・リアルタイム信号制御方法によって解決した効果的な交通制御方法を提供しようとするものである。
【課題を解決するための手段】
【0007】
本願発明の説明の前に、「交差点無停止走行制御システム」の基本について説明する。
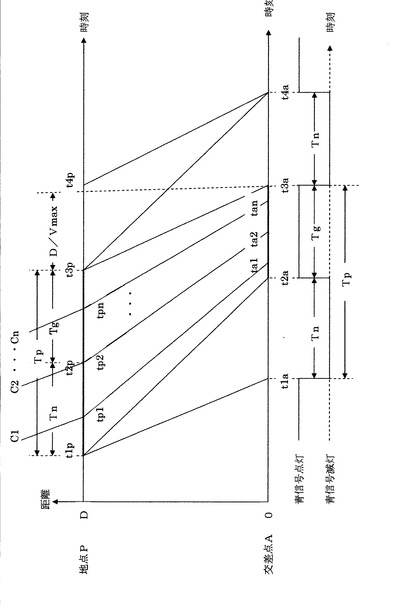
「交差点無停止走行制御システム」の基本は、図2および図3に示す如く、交差点Aから車両走行距離D上流の特定地点Pを交差点A1周期Tp の間に通過して交差点Aに向かう全車両を青信号期間Tg の間に交差点Aに到着させること、前記制御を交差点Aの各方向について行うこと、によって交差点Aに各方向から進入する車両について青信号・無停止走行を実現するものである。
【0008】
即ち図2、図3に示す如く、
交差点Aから距離D上流にある地点Pを時刻 t1p 〜 t3p の交差点Aの1信号周期Tp の間に通過する車両C1、C2、・・・Cn を時刻 t2a 〜 t3a の交差点A青信号期間Tgの間に交差点Aを通過するよう地点Pにおいて車両C1、C2、・・・Cn 個々に走行条件あるいは走行条件算出に必要な前記各種情報を提示し、車両C1、C2、・・・Cn は提示されたあるいは算出された走行条件で交差点Aまで走行して交差点Aを無停止で通過する、ものである。
【0009】
ここで、図2に示す方式と図3に示す方式の違いは、
図2においては、車両の地点P通過時刻 tp に対する交差点A到着時刻 ta の関係を、(数1)を満足するように設定するのに対し、
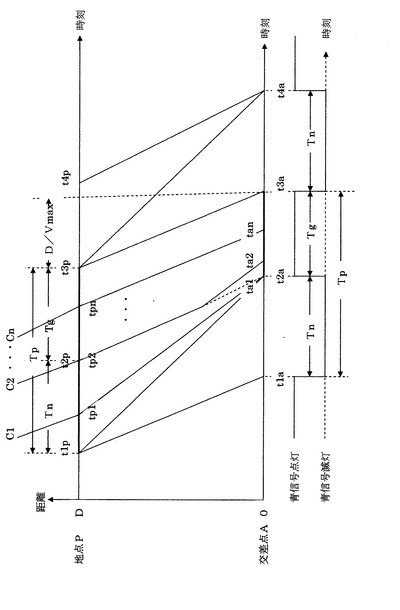
図3においては、(数2)の如く設定するところにある。
【0010】
即ち、図2の方式においては、地点Pの通過時刻 tp の時刻 t1p からの差時間 (tp −t1p)の信号周期Tp に対する割合を、交差点Aへの到着時刻 ta の時刻 t2a からの差時間 (ta −t2a)の青信号継続時間Tg に対する割合に一致するように交差点A到着時刻 ta を設定するのに対し、
図3の方式においては、地点P通過車両に対して、許容最高走行速度Vmax 以下の範囲内で最短時間で交差点Aに到着するように交差点A到着時刻 ta を設定する。
【0011】
従って、地点Pにおいて交差点Aに向かう車両に対して提供される地点P−交差点A間推奨所要時間 topt 、推奨走行速度 vopt は各々(数3)、(数4)で示される。
【0012】
(数1)
(tp −t1p)/(ta −t2a) =Tp/Tg
【0013】
(数2)
ta =t2a 但し tp < (t3p−Tg) の場合
あるいは、
t3a − ta =t3p − tp 但し(t3p−Tg)≦ tp < t3p の場合
【0014】
(数3)
topt = ta − tp
【0015】
(数4)
vopt = D/topt
【0016】
ここで、図2、図3、(数1)、(数2)、(数3)、(数4)において、
tp :車両の地点P通過時刻、
ta :車両の交差点A到着時刻、
topt :車両の地点P−交差点A間走行に際しての推奨所要時間、
vopt :車両の地点P−交差点A間走行に際しての推奨走行速度、
t2a 、t4a : 交差点A青信号点灯時刻、
t3a : 交差点A青信号滅灯時刻、
【0017】
t3a − t1a = t3p − t1p = Tp :交差点A信号周期、
t3a − t2a = t3p − t2p = Tg :交差点A青信号期間、
t2a − t1a = t2p − t1p = Tp − Tg =Tn
t3p : 地点Pを本時刻に通過した車両は走行速度Vmax で交差点Aに向い交差点Aを時刻 t3a の青信号滅灯時刻すれすれで通過する。
t3p =t3a − D/Vmax
t1p = t3p −Tp 、
【0018】
D:地点P−交差点A間車両走行距離、
Vmax : 地点P−交差点A間許容最高走行速度、
C1、C2、・・、Cn :時刻 t1p 〜 t3p の間に地点Pを通過する車両群、
tp1、tp2、・・、tpn :車両C1、C2、・・、Cn が各々地点Pを通過する時刻、
ta1、ta2、・・、tan :車両C1、C2、・・、Cn が各々交差点Aに到着予定時刻、
である。
【0019】
上記説明および図2、図3、より明らかな如く、
地点Pを時刻 t1p 〜 t3p の間に通過して交差点Aに向かう車両は、図2に示す方式、図3に示す方式とも、地点P通過時刻が t1p から経過するに従って、地点P−交差点P間推奨所要時間 topt は短く、従って推奨走行速度 vopt は速くなる。但し図3の方式においては時刻 t2p 〜 t3p 間に地点Pを通過する車両の推奨走行速度 vopt はVmax であり一定である。
【0020】
ここで、図2の方式、図3の方式の場合共、交差点Aに向けての走行中の車両が前方走行車に遭遇した場合は、当該車両の推奨走行速度 vopt が前方走行車の走行速度より速くても 安全車間距離を保って前方走行車に追従走行することは共通の大前提となる。
【0021】
以下に「交差点無停止走行制御システム」が適用されている交差点での信号のリアルタイム制御に関する本願発明を図1および図4を用いて説明する。
但し、本願発明は上記図2の方式、図3の方式共に適用できるものである。
また、図4は前記図2、図3を地点P1・P2 −交差点A間、および地点Q1・Q2 −交差点A間の時刻関係に書き直したものである。
【0022】
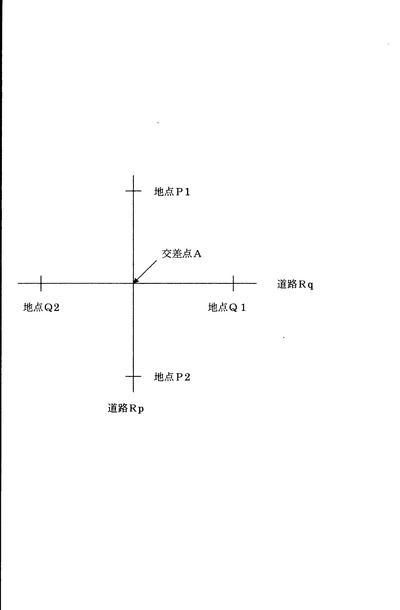
図1に示す交差点Aで交差する道路Rp およびRq 上の地点P1、P2、Q1、Q2 において、交差点Aの特定の信号周期 Tp の間に交差点Aを通過する車両数をNp1、Np2、Nq1、Nq2 を計数し、交差点Aの信号を前記車両数 Np1、Np2、Nq1、Nq2 、あるいは (Np1+Np2)、(Nq1+Nq2)のうち各道路の特性・交通量に応じて必要な一部の車両数あるいはそれらの相対関係で決定し制御することができれば、それは交差点Aの通過車両数にリアルタイムに対応した信号制御であるといえる。
【0023】
しかし上記車両数の計数は下記の如く「交差点無停止走行制御システム」の正常動作と矛盾した動作となるため不可能である。従って前記地点P1、P2、Q1、Q2 における通過車両数の計数、および計数結果を用いた交差点Aの信号制御は「交差点無停止走行制御システム」の特性を活用し、以下の如く行う。
【0024】
ここで、以下の説明を簡明に行うため、図1における道路Rp の地点P1−交差点A間車両走行距離と地点P2−交差点A間車両走行距離は等しくDp、また道路Rq の地点Q1−交差点A間車両走行距離と地点Q2−交差点A間車両走行距離は等しくDq 、(但しDp >Dq)とする。
【0025】
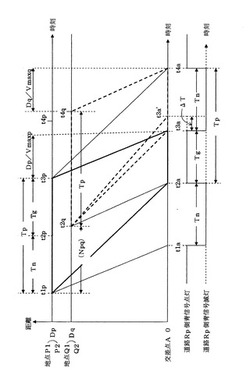
図4より明らかな如く、「交差点無停止走行制御システム」において、道路Rp の地点P1 および地点P2 を時刻 tp1 〜 t3p の間に通過して交差点Aに向かう車両は全て交差点Aに時刻 t2a 〜 t3a の道路Rp 側青信号点灯期間Tg の間に交差点Aに到着し交差点Aを青信号・無停止で通過する。
【0026】
また、道路Rq の地点Q1 および地点Q2 を時刻t2q 〜t4q の間に通過して交差点Aに向かう車両は全て交差点Aに時刻 t3a 〜 t4a の道路Rp 側青信号滅灯期間Tn の間、即ち道路Rq 側青信号点灯期間、に交差点Aに到着し交差点Aを青信号・無停止で通過する。
【0027】
従って時刻 t2a 〜 t4a の信号1周期Tp 間に交差点Aを通過する車両数は、時刻 t1p 〜 t3p の間に地点P1 および地点P2 を通過して交差点Aに向かう車両数Np1 、Np2 と、時刻 t2q 〜 t4q の間に地点Q1および地点Q2 を通過して交差点Aに向かう車両数Nq1 、Nq2 の和 (Np1 +Np2 +Nq1 +Nq2 )となる。
【0028】
一方、前記車両数計数において地点P1 および地点P2 における車両数Np1、Np2 の計数終了時刻は時刻 tp3 であるのに対し、「交差点無停止走行制御システム」における道路Rq の地点Q1 および地点Q2 通過車両の交差点Aの青信号期間 t3a 〜 t4a への到着・通過制御は時刻 t2q から開始しなければならない。
【0029】
言い換えれば、時刻 t2q においては信号周期 t2a 〜 t4a 中の時刻 t3a は設定済みでなければ道路Rq の地点Q1、Q2 における「交差点無停止走行制御」は不可能となる。即ち地点P1、地点P2 において前記信号1周期 t2a 〜 t4a 間の時刻 t3a 設定のための前記時刻 t1p 〜 t3p の間に行うべき車両数Np1、Np2 の計数は不可能となる。
上記問題は地点Q1、Q2 における通過車両数計数においても同様である。
【0030】
上記問題への対策として以下の方法をとる。但し、以下においては交差点Aの信号周期はTp で一定とし、地点P1、P2 における通過車両数Npq1、Npq2 による道路Rp 側青信号滅灯時刻 t3a の制御に限定して説明する。
【0031】
前記の如く「交差点無停止走行制御システム」においては地点P1 あるいは地点P2 を時刻t1p 〜 t3p に通過する車両は通過時刻が時刻 t1p から経過するに従って交差点Aを青信号で通過すべく提示される推奨走行速度 vopt は速くなる。従って、前記図2の方式、図3の方式とも、時刻 t1p 〜 t2p 間に地点P1 あるいは地点P2 を通過して交差点に向かう車両は地点P1あるいは地点P2 通過時に自車に提示された推奨走行速度 vopt より低い走行速度で走行する前方車両に追従走行しなければならない恐れが多くなり、これが前記地点P1 あるいは地点P2 −交差点A間の渋滞の一要因となる。
【0032】
言い換えれば、地点P1 あるいは地点P2 の通過車両数として時刻 t1p 〜 t3p 間の車両数を計数しなくても、時刻t1p 〜 t2p 間の車両数を計数することによって地点P1 あるいは地点P2 −交差点A間の渋滞発生の可能性が予測できる。但し時刻 t1p 〜 t3p 間に地点P1 あるいは地点P2 を通過する車両数の時間密度はほぼ均一とする。
【0033】
この結果、前記問題、即ち地点Q1 あるいは地点Q2 通過車両への「交差点無停止走行制御」を正常に行おうとすると車両数Np1、Np2 計数は不可能になるという問題、の解決策として時刻 t1p から時刻t2p に近い時刻 t2q (地点P1 および地点P2 −交差点A間距離Dp と地点Q1 および地点Q2 −交差点A間距離Dq が一致していれば、時刻t2p =時刻t2q となる)の間の地点P1 あるいは地点P2 通過車両台数Npq1 あるいはNpq2 を計数してこの計数結果をもって時刻t2a 〜 t4a の信号周期Tp 中の時刻 t3a を可変制御することによって実質的な交差点A信号のリアルタイム制御が可能となる。
【0034】
即ち、時刻 t1p 〜 t2q の間に地点P1 あるいは地点P2 を通過する車両数 をNpq1 あるいはNpq2 が下記(数5)の関係を満足する場合、道路Rp の地点P1 あるいは地点P2 から交差点Aへ向かう車両数が予め定められている交差点Aの道路Rp 側青信号期間 t2a 〜 t3a の交通容量Nc を超えるとして、時刻 t3a に(数6)の制御をする、即ち交差点Aの道路Rp 側信号の青信号滅灯時刻 t3a を前記交通容量不足分に対応した時間幅ΔT遅らせて時刻 t3a' とする、ことによって青信号期間を延長し渋滞を防止、あるいは低減できることになる。
【0035】
(数5)
〔Tp /(t2q −t1p)〕・Npq > Nc
【0036】
(数6)
t3a'=t3a +ΔT
【0037】
但し、(数5)、(数6)において、
Nc :交差点Aの時刻 t2a 〜 t3a 間の交通容量、
ΔT:交通容量不足分に対応した青信号期間補正時間幅、
ΔT=〔Tp /(t2q −t1p)〕・Npq −Nc
Npq : 地点P1 で計数した車両数Npq1 と地点P2 で計数した車両数Npq2 のうちいずれか大きい方の車両数、
である。
【0038】
尚上記においては説明を簡略化するため交差点Aの信号は青信号・赤信号のみとし、黄信号は省いているが実際上はこれを考慮すべきことは言うまでもない。
【0039】
また上記説明において、地点P1 −交差点A間車両走行距離と地点P2 −交差点A間車両走行距離は同一(=Dp)と、また地点Q1 −交差点A間車両走行距離と地点Q2 −交差点A間車両走行距離は同一(=Dq)と、各々しているが、これらは必ずしも同一である必要はない。
同一でない場合、例えば地点P1 あるいは地点P2 における通過車両数計数に際して、通過車両数計数期間 t1p 〜 t2q の計数終了時刻 t2q を、交差する道路Rq における「交差点無停止走行制御」に支障をきたさない時刻に設定することによって対応できる。
【発明の効果】
【0040】
以上の本願発明によって、「交差点無停止走行制御システム」の特性を生かしつつ、交通量にリアルタイムに対応した交通信号制御が可能になる。
【発明を実施するための最良の形態】
【0041】
上記説明においては制御対象道路 Rp の地点P1 および地点P2 の時刻 t1p 〜 t2q 間の通過車両数 Npq1 およびNpq2 をもって、交差点Aの対応する青信号期間 t2a 〜 t3a を可変制御して信号制御を行うとしたが、道路Rq 側の交通量を配慮するための地点Q1、Q2 の時刻 (t2q −Tp) 〜 t2q 間通過車両数、あるいはさらなる道路Rp 側の交通量情報としての地点P1 およびP2 の時刻 (t1p −Tp) 〜 t1p 間の通過車両数、をも制御情報に加えて前記青信号期間 t2a 〜 t3a の終了時刻 t3a を決定することによってより高精度な信号制御が可能となる。
【実施例1】
【0042】
図5に本発明による交通制御方法の交差点Aにおけるシステム構成例を示す。
但し本例においては、「交差点無停止走行制御システム」は道路Rp 、道路Rq に適用され、各々地点P1、地点P2、地点Q1、地点Q2 においてそこを通過する車両に対して交差点Aを青信号・無停止で通過するための走行条件提示がなされるものとする。
また、交差点Aの信号周期はTp で一定とし、信号のスプリット制御は道路Rp の交通量即ちNpq1 あるいはNpq2 情報のみで行うものとする。
【0043】
図5において、
50は、図1に示す交差点Aに設置された信号制御装置であり、交差点Aで交差する道路Rp、Rq の各道路車両進入方向に対応する信号機(図示せず)を制御すると共に、各信号機の信号状態情報(青信号点灯時刻 t2a、t4a、・・、青信号滅灯時刻 t1a、t3a、・・、信号周期Tp 等)を後述の路側装置51、52、53、54、に提供する。本信号制御装置50は基本的には交通管制センター(図示せず)からの制御信号により制御されるが、後述の路側装置51、52、からの各通過車両数情報Npq1、Npq2、 によってスプリット制御(本例においては時刻 t3a の可変制御)を行う。
【0044】
51、52は、各々交差点Aから車両走行距離Dp の道路Rp 路側地点P1、P2 に設けられた路側装置、
53、54は、各々交差点Aから車両走行距離Dq の道路Rq 路側地点Q1、Q2 に設けられた路側装置、
である。
各路側装置51、52、53、54の基本構成および動作は同一である(但し本例においては路側装置53,54においては各々地点Q1、Q2での車両数計数およびその結果の信号制御装置50への送信は行わない)ので、路側装置内部構成・動作の説明は路側装置51についてのみ行う。
【0045】
511は、信号制御装置50からの信号状態情報を受信すると共に、後述の路車間通信路側装置513で計数した地点P1 通過車両数Npq1 を信号制御装置に送信する送受信部、
【0046】
512は、予め入力・記憶されている交差点A−地点P1間車両走行距離Dp 、交差点A−地点Q1間車両走行距離Dq 、交差点A−地点P1間許容最高速度Vmaxp 、交差点A−地点Q1間許容最高速度Vmaxq と、信号制御装置50から送られる信号状態情報から、時刻t1p、t2p、tq2、t3p、・・・を算出して、地点P1 における通過車両数計数時間幅 t1p 〜 t2q を設定すると共に、時刻t1p 〜 t3p の間に地点P1 を通過する車両個々に対して交差点Aを時刻t2a 〜 t3a の間の青信号期間に到着通過するための走行条件(交差点A到着時刻ta 、推奨走行速度vopt 等)を算出する記憶・演算部、
【0047】
513は、記憶・演算部512の演算結果である走行条件を地点Pを通過する車両に路車間通信で送信すると共に、前記通過車両数計数時間幅 t1p 〜 t2q 内に走行条件を受信した車両から送られる走行条件受信認知信号を受信してその認知信号受信回数、即ち地点P1通過車両数Npq1、を計数する路車間通信路側装置、
であり、上記511、512、513で地点P1 路側装置51は構成される。
【0048】
上記の如く特定時間 t1p 〜 t2q 間に計数された地点P1 通過車両数Npq1 と地点P2 通過車両数Npq2 は信号制御装置50に送られそこで前記(数5)および(数6)を用いての時刻 t3a の可変制御即ちスプリット制御がなされ、その結果で交差点A各信号機は制御される。
このように構成・制御されることによって、地点P1、P2、Q1、Q2、を通過して交差点Aに向かう車両に対する正常な「交差点無停止走行制御」と共に、地点P1 および地点P2 の通過車両数にリアルタイムに対応した交通信号制御が可能となる。
【産業上の利用可能性】
【0049】
本願発明によって、交差点Aを通過する車両は「交差点無停止走行制御システム」の目的である車両の省エネルギー化、排出ガスの低減化の効果を保ちつつ、システムの特性を生かしたリアルタイム交通信号制御によって交差点A周辺での交通渋滞の予防・低減および定速走行による交通安全化も可能となる。
【図面の簡単な説明】
【0050】
【図1】本願発明の基本的考え方説明のための交差点A周辺図
【図2】「交差点無停止走行制御システム」の基本的考え方(その1)説明図
【図3】「交差点無停止走行制御システム」の基本的考え方(その2)説明図
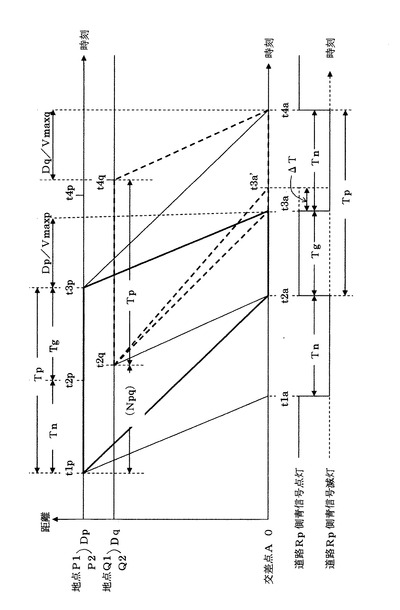
【図4】本願発明による交通制御の基本的考え方説明図、
【図5】本願発明によるシステム構成図
【符号の説明】
【0051】
図4において、
t1a : 交差点A道路Rp 側青信号滅灯時刻
t2a : 交差点A道路Rp 側青信号点灯時刻
t3a : 交差点A道路Rp 側青信号滅灯時刻
t4a : 交差点A道路Rp 側青信号点灯時刻
【0052】
t3a − t1a =t3p − t1p =t4a − t2a =t4q − t2q =Tp :交差点A信号周期
t3a − t2a =t3p − t2p =Tg :交差点A道路Rp 側青信号期間
t4a − t3a =t4q − t2q =Tn :交差点A道路Rq 側青信号期間
t3p =t3a − Dp/Vmaxp
t4q =t4a − Dq/Vmaxq
【0053】
t3a':=t3a+ΔT
ΔT:青信号期間補正時間幅(スプリット補正時間幅)
Dp:地点P1、地点P2 −交差点A間車両走行距離
Dq:地点Q1、地点Q2 −交差点A間車両走行距離
Vmaxp:道路Rp 許容最高走行速度
Vmaxq:道路Rq 許容最高走行速度
【0054】
図5において、
50:信号制御装置
51:地点P1 の路側に設置された路側装置
52:地点P2 の路側に設置された路側装置
53:地点Q1 の路側に設置された路側装置
54:地点Q2 の路側に設置された路側装置
511:路側装置50を構成する送受信部
512:路側装置50を構成する記憶・演算部
513:路側装置50を構成する路車間通信路側装置
である。
【技術分野】
【0001】
本発明は、車両の交差点への走行速度を適切に制御することによって交差点を青信号で通過する「交差点無停止走行制御システム」の特性を生かしつつ交通量にリアルタイムに対応することによって渋滞の予防・低減を行う交通信号制御方法に関する。
【背景技術】
【0002】
交差点での車両の停止回数を低減することによって、車両の省エネルギー、排出ガス削減を図る「交差点無停止走行制御システム」が提案されている。これは 交差点Aにいたる道路上交差点Aから一定距離D上流の地点Pにおいて、交差点Aの信号状態情報、車両の地点P通過時刻、車両走行距離D情報、および地点Pから交差点Aまでの間の許容最高走行速度Vmax情報、から車両が交差点Aを青信号・無停止で通過するための地点Pから交差点Aまでの走行条件即ち車両の地点P通過時刻 tp に対応する交差点A到着時刻 ta 、推奨所要時間 topt および推奨走行速度 vopt を算出し、前記算出された推奨走行速度 vopt 等の走行条件 に基づいて車両を地点P−交差点A間を走行させ交差点Aを青信号・無停止で通過させるものである(特許文献1、特許文献2、特許文献3)。
【0003】
前記「交差点無停止走行制御システム」においては、交通量が比較的少ない場合には期待される効果が充分発揮されるが、交通量が多くなると前記地点P−交差点A間における車両走行速度の低減化等に起因する渋滞発生の恐れが生じる。
即ち、車両の省エネルギー化、排出ガス低減化とあわせて地点P−交差点A間のスムースな走行を期待すべき「交差点無停止走行制御システム」によって新たな渋滞原因が発生してしまうことになる。
【0004】
一方主として交差点における渋滞解消策として、「プロファイル信号制御方式」がある。これは交差点上流の車両感知器で車両の量や速度を計測しその結果に基づいて渋滞の予測を行い下流にある交差点の信号機をリアルタイムに且つ最適に制御しようとするものである(非特許文献1)。
【0005】
【特許文献1】特開2006−031573
【特許文献2】特開2006−251836
【特許文献3】特願2006−356940
【非特許文献1】田島昭幸・小林雅文「次世代信号制御方式の開発と実証実験」SEIテクニカルレビュー・第166号
【発明の開示】
【発明が解決しようとする課題】
【0006】
前記「交差点無停止走行制御システム」が採用されている交差点に前記「プロファイル信号制御方式」のごときリアルタイム信号制御方式を適用しようとすると、下記に示すごとく「交差点無停止走行制御」が正常に行えなくなる恐れがでてくる。
本願発明は上記問題を「交差点無停止走行制御システム」に最適化した渋滞予測・リアルタイム信号制御方法によって解決した効果的な交通制御方法を提供しようとするものである。
【課題を解決するための手段】
【0007】
本願発明の説明の前に、「交差点無停止走行制御システム」の基本について説明する。
「交差点無停止走行制御システム」の基本は、図2および図3に示す如く、交差点Aから車両走行距離D上流の特定地点Pを交差点A1周期Tp の間に通過して交差点Aに向かう全車両を青信号期間Tg の間に交差点Aに到着させること、前記制御を交差点Aの各方向について行うこと、によって交差点Aに各方向から進入する車両について青信号・無停止走行を実現するものである。
【0008】
即ち図2、図3に示す如く、
交差点Aから距離D上流にある地点Pを時刻 t1p 〜 t3p の交差点Aの1信号周期Tp の間に通過する車両C1、C2、・・・Cn を時刻 t2a 〜 t3a の交差点A青信号期間Tgの間に交差点Aを通過するよう地点Pにおいて車両C1、C2、・・・Cn 個々に走行条件あるいは走行条件算出に必要な前記各種情報を提示し、車両C1、C2、・・・Cn は提示されたあるいは算出された走行条件で交差点Aまで走行して交差点Aを無停止で通過する、ものである。
【0009】
ここで、図2に示す方式と図3に示す方式の違いは、
図2においては、車両の地点P通過時刻 tp に対する交差点A到着時刻 ta の関係を、(数1)を満足するように設定するのに対し、
図3においては、(数2)の如く設定するところにある。
【0010】
即ち、図2の方式においては、地点Pの通過時刻 tp の時刻 t1p からの差時間 (tp −t1p)の信号周期Tp に対する割合を、交差点Aへの到着時刻 ta の時刻 t2a からの差時間 (ta −t2a)の青信号継続時間Tg に対する割合に一致するように交差点A到着時刻 ta を設定するのに対し、
図3の方式においては、地点P通過車両に対して、許容最高走行速度Vmax 以下の範囲内で最短時間で交差点Aに到着するように交差点A到着時刻 ta を設定する。
【0011】
従って、地点Pにおいて交差点Aに向かう車両に対して提供される地点P−交差点A間推奨所要時間 topt 、推奨走行速度 vopt は各々(数3)、(数4)で示される。
【0012】
(数1)
(tp −t1p)/(ta −t2a) =Tp/Tg
【0013】
(数2)
ta =t2a 但し tp < (t3p−Tg) の場合
あるいは、
t3a − ta =t3p − tp 但し(t3p−Tg)≦ tp < t3p の場合
【0014】
(数3)
topt = ta − tp
【0015】
(数4)
vopt = D/topt
【0016】
ここで、図2、図3、(数1)、(数2)、(数3)、(数4)において、
tp :車両の地点P通過時刻、
ta :車両の交差点A到着時刻、
topt :車両の地点P−交差点A間走行に際しての推奨所要時間、
vopt :車両の地点P−交差点A間走行に際しての推奨走行速度、
t2a 、t4a : 交差点A青信号点灯時刻、
t3a : 交差点A青信号滅灯時刻、
【0017】
t3a − t1a = t3p − t1p = Tp :交差点A信号周期、
t3a − t2a = t3p − t2p = Tg :交差点A青信号期間、
t2a − t1a = t2p − t1p = Tp − Tg =Tn
t3p : 地点Pを本時刻に通過した車両は走行速度Vmax で交差点Aに向い交差点Aを時刻 t3a の青信号滅灯時刻すれすれで通過する。
t3p =t3a − D/Vmax
t1p = t3p −Tp 、
【0018】
D:地点P−交差点A間車両走行距離、
Vmax : 地点P−交差点A間許容最高走行速度、
C1、C2、・・、Cn :時刻 t1p 〜 t3p の間に地点Pを通過する車両群、
tp1、tp2、・・、tpn :車両C1、C2、・・、Cn が各々地点Pを通過する時刻、
ta1、ta2、・・、tan :車両C1、C2、・・、Cn が各々交差点Aに到着予定時刻、
である。
【0019】
上記説明および図2、図3、より明らかな如く、
地点Pを時刻 t1p 〜 t3p の間に通過して交差点Aに向かう車両は、図2に示す方式、図3に示す方式とも、地点P通過時刻が t1p から経過するに従って、地点P−交差点P間推奨所要時間 topt は短く、従って推奨走行速度 vopt は速くなる。但し図3の方式においては時刻 t2p 〜 t3p 間に地点Pを通過する車両の推奨走行速度 vopt はVmax であり一定である。
【0020】
ここで、図2の方式、図3の方式の場合共、交差点Aに向けての走行中の車両が前方走行車に遭遇した場合は、当該車両の推奨走行速度 vopt が前方走行車の走行速度より速くても 安全車間距離を保って前方走行車に追従走行することは共通の大前提となる。
【0021】
以下に「交差点無停止走行制御システム」が適用されている交差点での信号のリアルタイム制御に関する本願発明を図1および図4を用いて説明する。
但し、本願発明は上記図2の方式、図3の方式共に適用できるものである。
また、図4は前記図2、図3を地点P1・P2 −交差点A間、および地点Q1・Q2 −交差点A間の時刻関係に書き直したものである。
【0022】
図1に示す交差点Aで交差する道路Rp およびRq 上の地点P1、P2、Q1、Q2 において、交差点Aの特定の信号周期 Tp の間に交差点Aを通過する車両数をNp1、Np2、Nq1、Nq2 を計数し、交差点Aの信号を前記車両数 Np1、Np2、Nq1、Nq2 、あるいは (Np1+Np2)、(Nq1+Nq2)のうち各道路の特性・交通量に応じて必要な一部の車両数あるいはそれらの相対関係で決定し制御することができれば、それは交差点Aの通過車両数にリアルタイムに対応した信号制御であるといえる。
【0023】
しかし上記車両数の計数は下記の如く「交差点無停止走行制御システム」の正常動作と矛盾した動作となるため不可能である。従って前記地点P1、P2、Q1、Q2 における通過車両数の計数、および計数結果を用いた交差点Aの信号制御は「交差点無停止走行制御システム」の特性を活用し、以下の如く行う。
【0024】
ここで、以下の説明を簡明に行うため、図1における道路Rp の地点P1−交差点A間車両走行距離と地点P2−交差点A間車両走行距離は等しくDp、また道路Rq の地点Q1−交差点A間車両走行距離と地点Q2−交差点A間車両走行距離は等しくDq 、(但しDp >Dq)とする。
【0025】
図4より明らかな如く、「交差点無停止走行制御システム」において、道路Rp の地点P1 および地点P2 を時刻 tp1 〜 t3p の間に通過して交差点Aに向かう車両は全て交差点Aに時刻 t2a 〜 t3a の道路Rp 側青信号点灯期間Tg の間に交差点Aに到着し交差点Aを青信号・無停止で通過する。
【0026】
また、道路Rq の地点Q1 および地点Q2 を時刻t2q 〜t4q の間に通過して交差点Aに向かう車両は全て交差点Aに時刻 t3a 〜 t4a の道路Rp 側青信号滅灯期間Tn の間、即ち道路Rq 側青信号点灯期間、に交差点Aに到着し交差点Aを青信号・無停止で通過する。
【0027】
従って時刻 t2a 〜 t4a の信号1周期Tp 間に交差点Aを通過する車両数は、時刻 t1p 〜 t3p の間に地点P1 および地点P2 を通過して交差点Aに向かう車両数Np1 、Np2 と、時刻 t2q 〜 t4q の間に地点Q1および地点Q2 を通過して交差点Aに向かう車両数Nq1 、Nq2 の和 (Np1 +Np2 +Nq1 +Nq2 )となる。
【0028】
一方、前記車両数計数において地点P1 および地点P2 における車両数Np1、Np2 の計数終了時刻は時刻 tp3 であるのに対し、「交差点無停止走行制御システム」における道路Rq の地点Q1 および地点Q2 通過車両の交差点Aの青信号期間 t3a 〜 t4a への到着・通過制御は時刻 t2q から開始しなければならない。
【0029】
言い換えれば、時刻 t2q においては信号周期 t2a 〜 t4a 中の時刻 t3a は設定済みでなければ道路Rq の地点Q1、Q2 における「交差点無停止走行制御」は不可能となる。即ち地点P1、地点P2 において前記信号1周期 t2a 〜 t4a 間の時刻 t3a 設定のための前記時刻 t1p 〜 t3p の間に行うべき車両数Np1、Np2 の計数は不可能となる。
上記問題は地点Q1、Q2 における通過車両数計数においても同様である。
【0030】
上記問題への対策として以下の方法をとる。但し、以下においては交差点Aの信号周期はTp で一定とし、地点P1、P2 における通過車両数Npq1、Npq2 による道路Rp 側青信号滅灯時刻 t3a の制御に限定して説明する。
【0031】
前記の如く「交差点無停止走行制御システム」においては地点P1 あるいは地点P2 を時刻t1p 〜 t3p に通過する車両は通過時刻が時刻 t1p から経過するに従って交差点Aを青信号で通過すべく提示される推奨走行速度 vopt は速くなる。従って、前記図2の方式、図3の方式とも、時刻 t1p 〜 t2p 間に地点P1 あるいは地点P2 を通過して交差点に向かう車両は地点P1あるいは地点P2 通過時に自車に提示された推奨走行速度 vopt より低い走行速度で走行する前方車両に追従走行しなければならない恐れが多くなり、これが前記地点P1 あるいは地点P2 −交差点A間の渋滞の一要因となる。
【0032】
言い換えれば、地点P1 あるいは地点P2 の通過車両数として時刻 t1p 〜 t3p 間の車両数を計数しなくても、時刻t1p 〜 t2p 間の車両数を計数することによって地点P1 あるいは地点P2 −交差点A間の渋滞発生の可能性が予測できる。但し時刻 t1p 〜 t3p 間に地点P1 あるいは地点P2 を通過する車両数の時間密度はほぼ均一とする。
【0033】
この結果、前記問題、即ち地点Q1 あるいは地点Q2 通過車両への「交差点無停止走行制御」を正常に行おうとすると車両数Np1、Np2 計数は不可能になるという問題、の解決策として時刻 t1p から時刻t2p に近い時刻 t2q (地点P1 および地点P2 −交差点A間距離Dp と地点Q1 および地点Q2 −交差点A間距離Dq が一致していれば、時刻t2p =時刻t2q となる)の間の地点P1 あるいは地点P2 通過車両台数Npq1 あるいはNpq2 を計数してこの計数結果をもって時刻t2a 〜 t4a の信号周期Tp 中の時刻 t3a を可変制御することによって実質的な交差点A信号のリアルタイム制御が可能となる。
【0034】
即ち、時刻 t1p 〜 t2q の間に地点P1 あるいは地点P2 を通過する車両数 をNpq1 あるいはNpq2 が下記(数5)の関係を満足する場合、道路Rp の地点P1 あるいは地点P2 から交差点Aへ向かう車両数が予め定められている交差点Aの道路Rp 側青信号期間 t2a 〜 t3a の交通容量Nc を超えるとして、時刻 t3a に(数6)の制御をする、即ち交差点Aの道路Rp 側信号の青信号滅灯時刻 t3a を前記交通容量不足分に対応した時間幅ΔT遅らせて時刻 t3a' とする、ことによって青信号期間を延長し渋滞を防止、あるいは低減できることになる。
【0035】
(数5)
〔Tp /(t2q −t1p)〕・Npq > Nc
【0036】
(数6)
t3a'=t3a +ΔT
【0037】
但し、(数5)、(数6)において、
Nc :交差点Aの時刻 t2a 〜 t3a 間の交通容量、
ΔT:交通容量不足分に対応した青信号期間補正時間幅、
ΔT=〔Tp /(t2q −t1p)〕・Npq −Nc
Npq : 地点P1 で計数した車両数Npq1 と地点P2 で計数した車両数Npq2 のうちいずれか大きい方の車両数、
である。
【0038】
尚上記においては説明を簡略化するため交差点Aの信号は青信号・赤信号のみとし、黄信号は省いているが実際上はこれを考慮すべきことは言うまでもない。
【0039】
また上記説明において、地点P1 −交差点A間車両走行距離と地点P2 −交差点A間車両走行距離は同一(=Dp)と、また地点Q1 −交差点A間車両走行距離と地点Q2 −交差点A間車両走行距離は同一(=Dq)と、各々しているが、これらは必ずしも同一である必要はない。
同一でない場合、例えば地点P1 あるいは地点P2 における通過車両数計数に際して、通過車両数計数期間 t1p 〜 t2q の計数終了時刻 t2q を、交差する道路Rq における「交差点無停止走行制御」に支障をきたさない時刻に設定することによって対応できる。
【発明の効果】
【0040】
以上の本願発明によって、「交差点無停止走行制御システム」の特性を生かしつつ、交通量にリアルタイムに対応した交通信号制御が可能になる。
【発明を実施するための最良の形態】
【0041】
上記説明においては制御対象道路 Rp の地点P1 および地点P2 の時刻 t1p 〜 t2q 間の通過車両数 Npq1 およびNpq2 をもって、交差点Aの対応する青信号期間 t2a 〜 t3a を可変制御して信号制御を行うとしたが、道路Rq 側の交通量を配慮するための地点Q1、Q2 の時刻 (t2q −Tp) 〜 t2q 間通過車両数、あるいはさらなる道路Rp 側の交通量情報としての地点P1 およびP2 の時刻 (t1p −Tp) 〜 t1p 間の通過車両数、をも制御情報に加えて前記青信号期間 t2a 〜 t3a の終了時刻 t3a を決定することによってより高精度な信号制御が可能となる。
【実施例1】
【0042】
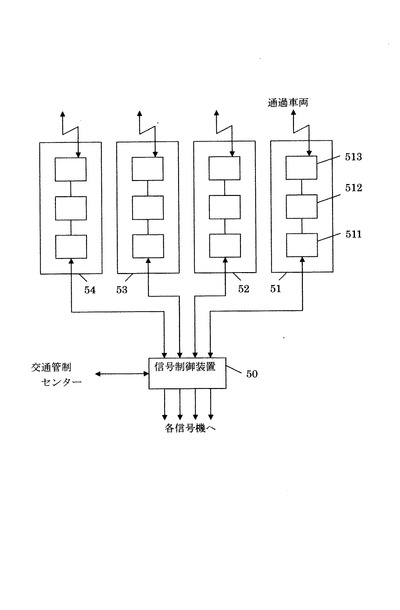
図5に本発明による交通制御方法の交差点Aにおけるシステム構成例を示す。
但し本例においては、「交差点無停止走行制御システム」は道路Rp 、道路Rq に適用され、各々地点P1、地点P2、地点Q1、地点Q2 においてそこを通過する車両に対して交差点Aを青信号・無停止で通過するための走行条件提示がなされるものとする。
また、交差点Aの信号周期はTp で一定とし、信号のスプリット制御は道路Rp の交通量即ちNpq1 あるいはNpq2 情報のみで行うものとする。
【0043】
図5において、
50は、図1に示す交差点Aに設置された信号制御装置であり、交差点Aで交差する道路Rp、Rq の各道路車両進入方向に対応する信号機(図示せず)を制御すると共に、各信号機の信号状態情報(青信号点灯時刻 t2a、t4a、・・、青信号滅灯時刻 t1a、t3a、・・、信号周期Tp 等)を後述の路側装置51、52、53、54、に提供する。本信号制御装置50は基本的には交通管制センター(図示せず)からの制御信号により制御されるが、後述の路側装置51、52、からの各通過車両数情報Npq1、Npq2、 によってスプリット制御(本例においては時刻 t3a の可変制御)を行う。
【0044】
51、52は、各々交差点Aから車両走行距離Dp の道路Rp 路側地点P1、P2 に設けられた路側装置、
53、54は、各々交差点Aから車両走行距離Dq の道路Rq 路側地点Q1、Q2 に設けられた路側装置、
である。
各路側装置51、52、53、54の基本構成および動作は同一である(但し本例においては路側装置53,54においては各々地点Q1、Q2での車両数計数およびその結果の信号制御装置50への送信は行わない)ので、路側装置内部構成・動作の説明は路側装置51についてのみ行う。
【0045】
511は、信号制御装置50からの信号状態情報を受信すると共に、後述の路車間通信路側装置513で計数した地点P1 通過車両数Npq1 を信号制御装置に送信する送受信部、
【0046】
512は、予め入力・記憶されている交差点A−地点P1間車両走行距離Dp 、交差点A−地点Q1間車両走行距離Dq 、交差点A−地点P1間許容最高速度Vmaxp 、交差点A−地点Q1間許容最高速度Vmaxq と、信号制御装置50から送られる信号状態情報から、時刻t1p、t2p、tq2、t3p、・・・を算出して、地点P1 における通過車両数計数時間幅 t1p 〜 t2q を設定すると共に、時刻t1p 〜 t3p の間に地点P1 を通過する車両個々に対して交差点Aを時刻t2a 〜 t3a の間の青信号期間に到着通過するための走行条件(交差点A到着時刻ta 、推奨走行速度vopt 等)を算出する記憶・演算部、
【0047】
513は、記憶・演算部512の演算結果である走行条件を地点Pを通過する車両に路車間通信で送信すると共に、前記通過車両数計数時間幅 t1p 〜 t2q 内に走行条件を受信した車両から送られる走行条件受信認知信号を受信してその認知信号受信回数、即ち地点P1通過車両数Npq1、を計数する路車間通信路側装置、
であり、上記511、512、513で地点P1 路側装置51は構成される。
【0048】
上記の如く特定時間 t1p 〜 t2q 間に計数された地点P1 通過車両数Npq1 と地点P2 通過車両数Npq2 は信号制御装置50に送られそこで前記(数5)および(数6)を用いての時刻 t3a の可変制御即ちスプリット制御がなされ、その結果で交差点A各信号機は制御される。
このように構成・制御されることによって、地点P1、P2、Q1、Q2、を通過して交差点Aに向かう車両に対する正常な「交差点無停止走行制御」と共に、地点P1 および地点P2 の通過車両数にリアルタイムに対応した交通信号制御が可能となる。
【産業上の利用可能性】
【0049】
本願発明によって、交差点Aを通過する車両は「交差点無停止走行制御システム」の目的である車両の省エネルギー化、排出ガスの低減化の効果を保ちつつ、システムの特性を生かしたリアルタイム交通信号制御によって交差点A周辺での交通渋滞の予防・低減および定速走行による交通安全化も可能となる。
【図面の簡単な説明】
【0050】
【図1】本願発明の基本的考え方説明のための交差点A周辺図
【図2】「交差点無停止走行制御システム」の基本的考え方(その1)説明図
【図3】「交差点無停止走行制御システム」の基本的考え方(その2)説明図
【図4】本願発明による交通制御の基本的考え方説明図、
【図5】本願発明によるシステム構成図
【符号の説明】
【0051】
図4において、
t1a : 交差点A道路Rp 側青信号滅灯時刻
t2a : 交差点A道路Rp 側青信号点灯時刻
t3a : 交差点A道路Rp 側青信号滅灯時刻
t4a : 交差点A道路Rp 側青信号点灯時刻
【0052】
t3a − t1a =t3p − t1p =t4a − t2a =t4q − t2q =Tp :交差点A信号周期
t3a − t2a =t3p − t2p =Tg :交差点A道路Rp 側青信号期間
t4a − t3a =t4q − t2q =Tn :交差点A道路Rq 側青信号期間
t3p =t3a − Dp/Vmaxp
t4q =t4a − Dq/Vmaxq
【0053】
t3a':=t3a+ΔT
ΔT:青信号期間補正時間幅(スプリット補正時間幅)
Dp:地点P1、地点P2 −交差点A間車両走行距離
Dq:地点Q1、地点Q2 −交差点A間車両走行距離
Vmaxp:道路Rp 許容最高走行速度
Vmaxq:道路Rq 許容最高走行速度
【0054】
図5において、
50:信号制御装置
51:地点P1 の路側に設置された路側装置
52:地点P2 の路側に設置された路側装置
53:地点Q1 の路側に設置された路側装置
54:地点Q2 の路側に設置された路側装置
511:路側装置50を構成する送受信部
512:路側装置50を構成する記憶・演算部
513:路側装置50を構成する路車間通信路側装置
である。
【特許請求の範囲】
【請求項1】
道路Rp、Rq の交差する交差点Aの道路Rp側青信号期間 t2a 〜 t3a の間に交差点Aに到着・通過するべく道路Rp 上の上流地点Pを信号1周期Tp の時刻 t1p 〜 t3p の間に通過して交差点Aに向かう車両の内、時刻 t1p 〜 t2q の間に通過する車両数 Npq を計数して計数結果から地点P−交差点A間の渋滞発生を予測し、予測した渋滞の程度によって前記交差点Aの道路Rp 側青信号期間 t2a 〜 t3a の青信号滅灯時刻 t3a を可変制御して渋滞発生を予防・低減することを特徴とする「交差点無停止走行制御システム」に適合した交通制御方法。
但し前記時刻 t2q は、前記交差点Aにおける道路Rp側青信号期間 t2a 〜 t3a に継続する道路Rq 側青信号期間 t3a 〜 t4a に交差点Aを通過すべく道路Rq 上の上流地点Qを時刻 t2q 〜 t4q の間に通過する車両の通過開始時刻である。
【請求項2】
地点Pにおける車両通過数計数を、地点P路側装置から車両に対して送信される交差点Aを無停止で通過するための走行条件情報に対応して、車両から路側装置へ返信される走行条件情報受信認知信号の回数計数をもって行うことを特徴とする請求項1記載の交通制御方法。
【請求項1】
道路Rp、Rq の交差する交差点Aの道路Rp側青信号期間 t2a 〜 t3a の間に交差点Aに到着・通過するべく道路Rp 上の上流地点Pを信号1周期Tp の時刻 t1p 〜 t3p の間に通過して交差点Aに向かう車両の内、時刻 t1p 〜 t2q の間に通過する車両数 Npq を計数して計数結果から地点P−交差点A間の渋滞発生を予測し、予測した渋滞の程度によって前記交差点Aの道路Rp 側青信号期間 t2a 〜 t3a の青信号滅灯時刻 t3a を可変制御して渋滞発生を予防・低減することを特徴とする「交差点無停止走行制御システム」に適合した交通制御方法。
但し前記時刻 t2q は、前記交差点Aにおける道路Rp側青信号期間 t2a 〜 t3a に継続する道路Rq 側青信号期間 t3a 〜 t4a に交差点Aを通過すべく道路Rq 上の上流地点Qを時刻 t2q 〜 t4q の間に通過する車両の通過開始時刻である。
【請求項2】
地点Pにおける車両通過数計数を、地点P路側装置から車両に対して送信される交差点Aを無停止で通過するための走行条件情報に対応して、車両から路側装置へ返信される走行条件情報受信認知信号の回数計数をもって行うことを特徴とする請求項1記載の交通制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−193475(P2009−193475A)
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2008−35385(P2008−35385)
【出願日】平成20年2月16日(2008.2.16)
【出願人】(301001199)
【Fターム(参考)】
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成20年2月16日(2008.2.16)
【出願人】(301001199)
【Fターム(参考)】
[ Back to top ]