
交通情報を判定する方法及びその方法を実行するように構成された装置
本発明は、交通情報を判定する方法に関する。方法は、入出力装置(25;425)を使用して少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信することと、プロセッサユニット(11;411)を使用して、少なくとも1枚の受信した写真において少なくとも1つの道路区間の複数の車両(50)を認識することと、少なくとも1台の認識された車両(50)に基づいて交通情報を判定することとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
発明の分野
本発明は、交通情報を判定する方法に関する。また、本発明は、その方法を実行するように構成された装置に関する。
【背景技術】
【0002】
GPS(Global Positioning System)に基づく従来のナビゲーションデバイスは周知であり、車載ナビゲーションシステムとして広く採用されている。そのようなGPSに基づくナビゲーションデバイスは、自身の地球上における位置を測定する能力を有する外部(又は内部)のGPS受信機と通信を行う機能を含む演算装置に関係する。更に、演算装置は、出発地の住所と目的地の住所との間のルートを判定する能力を有する。出発地の住所と目的地の住所は、演算装置のユーザにより入力される。通常、演算装置は、地図データベースから出発地の住所の場所と目的地の住所の場所との間の「最善」又は「最適」なルートを計算することがソフトウェアにより可能になる。「最善」又は「最適」なルートは、所定の基準に基づいて決められ、必ずしも最速又は最短のルートである必要はない。
【0003】
ナビゲーションデバイスは、通常は車両のダッシュボードに搭載されるが、車両に搭載されたコンピュータ又は自動車のラジオの一部として構成されてもよい。ナビゲーションデバイスは、PDA等の携帯型のシステム(の一部)であってもよい。
【0004】
GPS受信機から得られる位置情報を使用することにより、演算装置は、定期的に自装置の位置を判定し、車両の現在の位置をユーザに対して表示できる。ナビゲーションデバイスは、地図データを格納するメモリ素子及び地図データの選択部分を表示するディスプレイを具備してもよい。
【0005】
更にナビゲーションデバイスは、ディスプレイ上に表示され且つ/又はスピーカからの可聴信号として生成される適切なナビゲーション指示により判定されたルートの案内の方法を指示できる(例えば、「100m先を左折する」)。達成されるべき動作を示す図形(例えば、前方を左折することを示す左矢印)は、ステータスバーに表示され、地図自体には該当する分岐点/曲がり角等に重ね合わされる。
【0006】
運転者がナビゲーションシステムにより計算されたルートに沿って自動車を運転している時に、運転者によりルートの再計算が開始されることを許容する車載ナビゲーションシステムが知られている。これは、車両が建築工事又は交通渋滞に直面した場合に有用である。
【0007】
また、ナビゲーションデバイスにより展開されるルート計算アルゴリズムの種類をユーザが選択できることも周知であり、例えば、「通常」モード及び「高速」モード(最短時間でルートを計算するが、通常モード程多くの代替ルートを調査しない)から選択する。
【0008】
また、ユーザが規定した基準でルートを計算できることが周知である。例えば、ユーザは、景色のよいルートがデバイスにより計算されることを好む。デバイスのソフトウェアは、種々のルートを計算し、例えば、景色が美しい所としてタグ付けされる興味のある場所(名所(POI)として知られた場所)をルートに沿って最も多く含むルートを更に有利に重み付けする。
【0009】
出発地の住所と目的地の住所との間のルートを判定するために、ナビゲーションデバイスは地図データを使用する。格納された好みの設定又は入力された好みの設定(最短ルート、最速ルート、景色のよいルート、…)に依存して、ナビゲーションデバイスは、格納された地図データを使用して「最適な」ルートを計算する。しかし、「最適な」ルートは、道路の現在の状況に依存して時間毎に異なる。例えば「最適な」ルートは、道路のある特定の区間における車両の量、予想される交通渋滞、混雑、迂回路等に依存する。
【0010】
米国特許出願公開第2002/0128770A1号において、道路の状況に関するリアルタイム情報を運転者に提供するシステムが説明される。システムは、カメラを使用して地上の映像を作成する。カメラは、地上に置かれたカメラであってもよいし、あるいは衛星に置かれたカメラであってもよい。サーバは、クライアントの車両に搭載されるナビゲーションデバイスに映像(の一部)を送信する。ナビゲーションデバイスは、受信した映像を表示するように構成され、クライアントが道路の状況を評価することを可能にする。
【0011】
周知のナビゲーションデバイスは、変化する道路の状況及び状態を考慮するように構成される。そのようなナビゲーションデバイスは、交通渋滞に関する情報をサーバから受信するように構成される。その情報は、ルートを計画する時にナビゲーションデバイスにより使用されるか、あるいは既に計画されたルートを別のルートにするために使用されてもよい。例えば、交通渋滞に関する情報は、通過する車両の速度を測定する路面に埋設された検出システムを使用して収集される。
【特許文献1】米国特許出願公開第2002/0128770A1号
【発明の開示】
【発明が解決しようとする課題】
【0012】
本発明の目的は、交通情報を収集する別の手段を提供する方法を提供することである。
【課題を解決するための手段】
【0013】
この目的を達成するために、本発明は上述に関わる方法を提供する。方法は:
−入出力装置を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し;
−プロセッサユニットを使用して、少なくとも1枚の受信した写真において少なくとも1つの道路区間の複数の車両を認識し;
−少なくとも1台の認識された車両に基づいて交通情報を判定することを含むことを特徴とする。
【0014】
この方法は、交通情報を収集する別の手段を提供する。方法は、演算装置により実行される。例えば衛星で撮影された写真を使用して交通情報を収集することは、交通情報を収集するのに容易で信頼性のある手段である。
【0015】
本発明の一実施形態によると、複数の車両は、パターン認識技術を使用して認識される。これは、コンピュータ等を使用して車両を認識するのに容易で信頼性のある手段である。
【0016】
本発明の一実施形態によると、パターン認識技術に対する入力として地図データが使用される。これにより、自動車が存在すると予想される場所が地図データから既に分かっている場合には自動車が更に容易に認識されるため、パターン認識は向上する。
【0017】
本発明の一実施形態によると、方法は、少なくとも1枚の受信した写真に基づいて複数の認識された車両の速度を計算することを更に含む。これは、道路又は道路区間の車両の量を判定し且つ道路又は道路区間の車両の平均速度を推定することにより行なわれてもよい。しかし、車両の速度を計算又は推定するのに他の技術が使用されてもよい。
【0018】
本発明の一実施形態によると、複数の車両の速度は、
−道路区間に対する車両密度を判定し、
−道路区間の複数の認識された車両の平均速度を車両密度から推定することにより計算される。これは、単一の写真にのみ基づいて車両の平均速度を推定するのに有利な手段である。交通量が更に多くなると車の流れが遅くなることは周知である。
【0019】
本発明の一実施形態によると、道路区間に対する車両密度は、道路又は道路区間に属する写真の第1の色の画素数(ndark)と他の色の画素数(nother)との比を判定することにより判定される。この比は、道路又は道路区間の交通量を示す。本実施形態によると、パターン認識技術を採用する必要はない。
【0020】
本発明の一実施形態によると、複数の認識された車両の速度は、複数の認識された車両のぼけの量を判定することにより計算される。本実施形態によると、車両の速度は単一の写真に基づいて計算される。
【0021】
本発明の一実施形態によると、方法は:
−第1の写真が第1の時点で作成され且つ第2の写真が第2の時点で作成される地球の一部を示す少なくとも2枚の写真を撮影装置から受信し、
−第1の写真において複数の車両を認識し、
−第2の写真において複数の車両を認識し、
−第1の写真及び第2の写真の双方において認識された複数の車両の少なくとも一部が第1の写真と第2の写真との間で移動した距離を計算し、
−計算された距離、並びに第1の時点及び第2の時点を使用して複数の認識された車両の速度を計算することを含む。認識された車両の速度は、2枚の写真に基づいて直接的で信頼性のある手段で計算される。
【0022】
本発明の一実施形態によると、方法は、複数の認識された車両の計算された速度と複数の認識された車両が認識された道路区間に関連付けられる基準速度とを比較することを更に含む。この比較に基づいて、交通渋滞等があるか等、道路状態が変化したかを判定できる。
【0023】
本発明の一実施形態によると、方法は、複数の認識された車両の計算された速度と所定の最低速度とを比較することを更に含む。本実施形態によると、各道路又は各道路区間に対する基準速度を格納する必要はなく、それによりメモリ空間が節約される。判定された速度は最低速度と比較される。
【0024】
本発明の一実施形態によると、方法は、
−認識された車両の位置を判定し、
−判定された位置と駐車場に関する情報を含む地図データとを比較し、
−駐車場の空き状況を判定することを更に含む。このように、使用可能な駐車場にユーザを案内するために使用される駐車場の空き状況に関する情報が収集される。
【0025】
本発明の一実施形態によると、方法は、
−判定された交通情報を含む信号を編集し、
−編集された信号を送信することを更に含む。判定された交通情報は、例えば少なくとも1台の認識された車両の計算された速度又は駐車場の空き状況に関する情報であってもよい。交通情報が計算された速度に関するものである時、少なくとも1台の認識された車両の計算された速度が基準速度から所定の閾値以上異なるか又は所定の最低速度を下回る場合、信号は単に編集され且つ送信されてもよい。信号は同報通信されてもよいが、2点間通信モード(サーバからナビゲーションデバイス)で送信されてもよい。
【0026】
更なる面によると、本発明は、入出力装置、記憶装置及び処理ユニットを具備し、処理ユニットが入出力装置を使用して他のデバイスと通信するように構成され且つ記憶装置と通信するように構成されるデバイスに関する。デバイスは、
−入出力装置を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し、
−処理ユニットを使用して、少なくとも1枚の受信した写真において少なくとも1つの道路区間の複数の車両を認識し、
−複数の認識された車両に基づいて交通情報を判定するように構成されることを特徴とする。
【0027】
本発明の一実施形態によると、デバイスは、判定された交通情報に基づいて信号を編集し且つ入出力装置を使用して信号を送信するように構成されたサーバである。判定された交通情報を含む信号を例えばナビゲーションデバイスに送信することにより、ナビゲーションデバイスはその情報を使用してルートを計画できる。
【0028】
本発明の一実施形態によると、デバイスは、ルートを計画するように構成されたナビゲーションデバイスである。
【0029】
本発明の一実施形態によると、ナビゲーションデバイスは、判定された交通情報に基づいてルートを計画するように構成される。
【0030】
本発明の更なる面は、本発明に関わるデバイスを具備する車両に関する。
【0031】
更なる面によると、本発明は、コンピュータにロードされた時に本発明に関わる方法を実行するように構成されたコンピュータプログラムに関する。
【0032】
更なる面によると、本発明は、本発明に関わるコンピュータプログラムを含むデータ記憶媒体に関する。
【発明を実施するための最良の形態】
【0033】
添付の概略図を参照して、本発明の実施形態を例として説明する。図中、対応する図中符号は対応する部分を示す。
【0034】
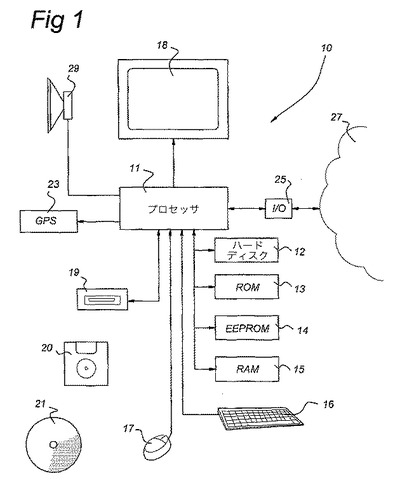
図1は、算術演算を行なうプロセッサユニット11を具備するナビゲーションデバイス10の一実施形態を示す概略ブロック図である。プロセッサユニット11は、ハードディスク12、読み出し専用メモリ(ROM)13、電気的消去可能プログラマブルROM(EEPROM)14及びランダムアクセスメモリ(RAM)15等の命令及びデータを格納する記憶装置と通信するように構成される。記憶装置は、地図データを含んでもよい。この地図データは、2次元地図データ(緯度及び経度)であってもよいが、第3の次元(高度)を含んでもよい。地図データは、ガソリンスタンド、興味のある場所に関する情報等の追加の情報を更に含んでもよい。また、地図データは、道路沿いの建物及び物体の形状に関する情報を含んでもよい。
【0035】
プロセッサユニット11は、キーボード16及びマウス17等の1つ以上の入力装置と通信するように構成されてもよい。キーボード16は、例えば、タッチスクリーンであるディスプレイ18に提供される仮想キーボードであってもよい。プロセッサユニット11は、例えば、フロッピディスク20又はCDROM21を読み取るために、ディスプレイ18、スピーカ29及び1つ以上の読み取り装置19等の1つ以上の出力装置と通信するように更に構成されてもよい。ディスプレイ18は、一般的なコンピュータディスプレイ(例えば、LCD)であってもよく、あるいは計測データを自動車のフロントガラスに投影するために使用されるヘッドアップディスプレイ等の投影型ディスプレイであってもよい。ディスプレイ18は、タッチスクリーンとして機能するように構成されるディスプレイであってもよい。タッチスクリーンは、ユーザが指でディスプレイ18に触れることにより命令及び/又は情報を入力することを可能にする。
【0036】
プロセッサユニット11は、入出力装置25を使用して他の演算装置又は通信装置と通信するように更に構成されてもよい。入出力装置25は、ネットワーク27を介して通信を行なえるように構成されて示される。
【0037】
スピーカ29は、ナビゲーションデバイス10の一部として構成されてもよい。ナビゲーションデバイス10が車載ナビゲーションデバイスとして使用される場合、ナビゲーションデバイス10は、自動車のラジオ及びボードコンピュータ等のスピーカを使用してもよい。
【0038】
プロセッサユニット11は、ナビゲーションデバイス10の位置に関する情報を提供するGPS受信機等の位置決め装置23と通信するように更に構成されてもよい。本実施形態によると、位置決め装置23はGPSに基づく位置決め装置23である。しかし、ナビゲーションデバイス10には、任意の種類の位置検知技術を実装してもよく、GPSに限定されないと理解されるであろう。従って、ナビゲーションデバイス10は、欧州のガリレオシステム等の他の種類のGNSS(global navigation satellite system:グローバルナビゲーションサテライトシステム)を使用して実現することもできる。同様に、ナビゲーションデバイス10は、衛星を使用する位置/速度システムに限定されず、地上ビーコン又はデバイスが地理的な場所を判定することを可能にする任意の他の種類のシステムを使用しても同様に展開される。
【0039】
しかし、当業者に周知の更なる及び/又は他の記憶装置、入力装置及び読み取り装置が提供されてもよいことが理解されるべきである。更に、それら装置のうち1つ以上の装置は、必要に応じてプロセッサユニット11から物理的に遠く離れて配置されてもよい。プロセッサユニット11は1つのボックスで示されるが、当業者には周知であるように、互いに遠く離れて配置され且つ1つの主プロセッサにより制御されるか又は同時に機能するいくつかの処理ユニットを含んでもよい。
【0040】
ナビゲーションデバイス10は、コンピュータシステムとして示されるが、本明細書で説明される機能を実行するように構成されるアナログ及び/又はデジタル及び/又はソフトウェア技術を使用する任意の信号処理システムであってもよい。図1に示すナビゲーションデバイス10は、複数の構成要素から構成されるものとして示すが、単一のデバイスとして構成されてもよいことが理解されるであろう。
【0041】
ナビゲーションデバイス10は、Navigatorと呼ばれるTomTom B.V.のナビゲーションソフトウェア等のナビゲーションソフトウェアを使用してもよい。ナビゲータソフトウェアは、Compaq iPaq等のタッチスクリーンの(すなわち、スタイラスで制御される)PocketPC搭載PDAデバイス、並びに一体型GPS受信機23を有するデバイス上で実行してもよい。組み合わされたPDA及びGPS受信機システムは、車載ナビゲーションシステムとして使用されるものとして設計される。本発明は、一体型GPS受信機/コンピュータ/ディスプレイを有するデバイス、あるいは車両以外による使用(例えば、歩行者)又は自動車以外の車両(例えば、航空機)に対して設計されたデバイス等のナビゲーションデバイス10の任意の他の構成で実現されてもよい。
【0042】
図2は、上述のようなナビゲーションデバイス10を示す。
【0043】
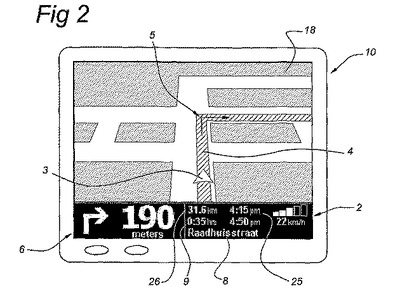
ナビゲータソフトウェアは、ナビゲーションデバイス10上で実行する場合、図2に示すようにディスプレイ18に通常のナビゲーションモード画面をナビゲーションデバイス10に表示させる。このビューは、テキスト、記号、音声ガイダンス及び動画地図の組合せを使用して運転指示を提供してもよい。重要なユーザインタフェース要素は、3D地図が画面の殆どを占有することである。尚、その地図は2D地図として示されてもよい。
【0044】
地図は、ナビゲーションデバイス10が動く方向が常に「上姿勢」になるように回転されたナビゲーションデバイス10の位置及びその周囲を示す。ステータスバー2は、画面の下1/4に渡ってもよい。ナビゲーションデバイス10の現在の場所(ナビゲーションデバイス10自体が従来のGPS位置探索を使用して判定する)及びその姿勢(移動する方向から推測される)は、位置矢印3により示される。デバイスにより計算されたルート4(メモリ素子11、12、13、14、15の地図データベースに格納された地図データに適用されるメモリ素子11、12、13、14、15に格納されたルート計算アルゴリズムを使用して)は、陰影をつけた経路で示される。ルート4において、全ての主な動作(例えば、角、交差点、ロータリー等を曲がる)は、ルート4に重なる矢印5により概略的に示される。ステータスバー2は、左側に次の動作6(ここでは、右折)を示す概略的なアイコンを更に含む。ステータスバー2は、デバイスにより計算されたルート全体のデータベース(すなわち、選択されるルートを規定する全ての道路及び関連する動作のリスト)から抽出される次の動作までの距離(すなわち、右折−ここでは距離は190メートル)を更に示す。ステータスバー2は、現在の道路名8、到着までの推定時間9(ここでは、35分)、実際の推定到着時間25(4:50pm)及び目的地までの距離26(31.6Km)を更に示す。ステータスバー2は、移動電話と同様の信号強度指標でGPS信号強度等の追加の情報を更に示してもよい。
【0045】
上述したように、ナビゲーションデバイスは、ユーザがナビゲーションメニュー(不図示)を呼び出すことを可能にするタッチスクリーン等の入力装置を具備してもよい。このメニューから、他のナビゲーション機能は開始又は制御される。非常に容易に呼び出される(例えば、地図の表示からメニュー画面まで1ステップである)メニュー画面からナビゲーション機能を選択することを可能にすることにより、ユーザ対話が非常に簡単化されて高速且つ容易になる。ナビゲーションメニューは、ユーザが目的地を入力するオプションを含む。
【0046】
ナビゲーションデバイス10自体の実際の物理的な構造は、一体型GPS受信機23又は外部GPS受信機からのGPSデータ出力以外は任意の従来の携帯型のコンピュータと基本的に異ならない。従って、メモリ素子12、13、14、15は、ルート計算アルゴリズム、地図データベース及びユーザインタフェースソフトウェアを格納する。プロセッサユニット11は、ユーザ入力を解釈及び処理し(例えば、出発地及び目的地の住所を入力するためのタッチスクリーン、並びに全ての他の制御入力を使用して)、最適なルートを計算するルート計算アルゴリズムを展開する。「最適」は、最短時間又は最短距離、あるいは他のユーザに関係する要素等の基準を示してもよい。
【0047】
更に詳細には、ユーザは、タッチスクリーン18、キーボード16等の提供された入力装置を使用して、ナビゲーションデバイス10上で実行するナビゲーションソフトウェアにユーザの出発位置及び要求する目的地を入力する。ユーザは、移動ルートを計算する方法を選択する。ルートを非常に迅速に計算するがルートが最短ではない可能性のある「高速」モード;全ての可能なルートを調べ且つ最短のルートを見つけるが計算時間がより長い「フル」モード等の種々のモードが提供される。例えば、特に美しい景色としてマーク付けされた殆どの名所(興味のある位置)を通過するか又は子供が興味を持つ可能性のある殆どの名所を通過する景色のよいルート、あるいは分岐点が最も少ないルートをユーザが規定する等、他のオプションが可能である。
【0048】
道路自体は、ナビゲーションデバイス10上で実行するナビゲーションソフトウェアの一部である(又は、ナビゲーションソフトウェアによりアクセスされる)地図データベースにおいて線−すなわちベクトル(例えば、道路の始点、終点、方向であり、道路全体は、各々が始点/終点方向パラメータにより一意に規定される数百の部分から構成される)として記述される。地図は、そのような道路ベクトル、興味のある場所(名所)、道路名、公園の境界や川の境界等の他の地理的特徴の集合であり、それらはベクトルに関して規定される。全ての地図の特徴(例えば、道路ベクトル、名所等)は、GPS座標系に対応するか又は関連する座標系で規定され、GPSシステムを介して判定されるデバイスの位置を地図に示される該当の道路に配置することを可能にする。
【0049】
ルート計算は、ナビゲーションソフトウェアの一部である複雑なアルゴリズムを使用する。アルゴリズムは、大量の潜在的に異なるルートに点数をつけるために適用される。ナビゲーションソフトウェアは、景色のよいルート、歴史博物館及びスピードカメラなしとユーザが規定したフルモードスキャン等の基準(又はデバイスのデフォルト)に対してそれらルートを評価する。規定された基準に最もよく適合するルートは、プロセッサユニット11により計算され、ベクトル、道路名及びベクトルの終点で行なわれる動作のシーケンス(例えば、100メートル先でx通りを左折する等、ルートの各道路に沿う所定の距離に対応する)としてメモリ素子12、13、14、15のデータベースに格納される。
【0050】
図3は、本発明に関わるシステムを概略的に示す。
【0051】
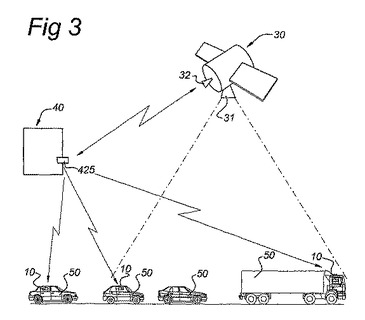
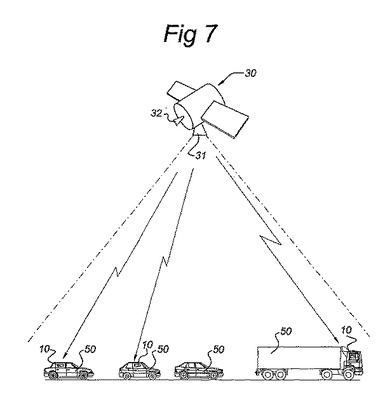
図3は、地上撮影装置31及び送信装置32を具備する衛星30を示す。地上撮影装置31は、地上の車両50を撮影するように構成される。車両50は、ナビゲーションデバイス10を含んでもよい。
【0052】
衛星30は、送信装置32を使用して写真をサーバ40に送信する。衛星は、受信機を更に具備してもよい。受信機は送信機32と一体形成されてもよく、それによりトランシーバを形成する。
【0053】
衛星30は、上述のタスクを実行するために追加のデバイスを更に具備してもよいことが当業者には理解されるだろう。衛星30は、例えばプロセッサユニット及びメモリ素子を具備してもよい。プロセッサユニットは、地上撮影装置31を制御して地上のある特定の場所を撮影するようにプログラムされてもよい。写真は、サーバ40に送信される前にメモリ素子に格納されてもよい。サーバ40は受信装置を具備する。受信装置は、例えば入出力装置425であってもよい。
【0054】
サーバ40は、衛星30から遠く離れて位置付けられてもよい。サーバ40は、例えば図4に示すような演算装置であってもよい。
【0055】
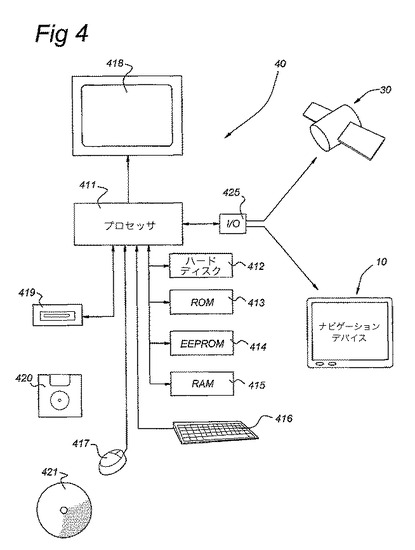
図4は、プロセッサユニット411を含むサーバ40の一実施形態を更に詳細に示す概略ブロック図である。プロセッサユニット411は、ハードディスク412、読み出し専用メモリ(ROM)413、電気的消去可能プログラマブルROM(EEPROM)414及びランダムアクセスメモリ(RAM)415等の命令及びデータを格納する記憶装置と通信するように構成される。プロセッサユニット411は、算術演算を実行するために構成されてもよい。
【0056】
プロセッサユニット411は、キーボード416及びマウス417等の1つ以上の入力装置と通信するように構成されてもよい。例えばキーボード416は、タッチスクリーンであるディスプレイ418に提供される仮想キーボードであってもよい。プロセッサユニット411は、例えばフロッピディスク420又はCDROM421を読み取るために、ディスプレイ418、スピーカ429及び1つ以上の読み取り装置419等の1つ以上の出力装置と通信するように更に構成されてもよい。ディスプレイ418は、従来のコンピュータディスプレイ(例えば、LCD)であってもよく、あるいは他の任意の適切なディスプレイであってもよい。ディスプレイ418は、ユーザが指でディスプレイ418に触れることにより命令及び/又は情報を入力することを可能にするタッチスクリーンとして機能するように構成されたディスプレイであってもよい。
【0057】
しかし、当業者に周知の更なる及び/又は他の記憶装置、入力装置及び読み取り装置が提供されてもよいことが理解されるべきである。更に、それら装置のうち1つ以上の装置は、必要に応じてプロセッサユニット411から物理的に遠く離れて配置されてもよい。プロセッサユニット411は1つのボックスで示されるが、当業者には周知であるように、互いに遠く離れて配置され且つ1つの主プロセッサにより制御されるか又は同時に機能するいくつかの処理ユニットを含んでもよい。
【0058】
サーバ40は、コンピュータシステムとして示されるが、本明細書で説明される機能を実行するように構成されるアナログ及び/又はデジタル及び/又はソフトウェア技術を使用する任意の信号処理システムであってもよい。サーバ40は、複数の構成要素から構成されるものとして図4に示すが、単一のデバイスとして形成されてもよいことが理解されるだろう。
【0059】
プロセッサユニット411は、入出力装置425を使用して他の演算装置又は通信装置と通信するように更に構成されてもよい。図4によると、入出力装置425は、サーバ40と衛星30との間の通信及びサーバ40とナビゲーションデバイス10との間の通信を可能にする。
【0060】
プロセッサユニット411は、記憶装置412、413、414、415に格納されるプログラム命令を実行するように構成されてもよい。
【0061】
記憶装置412、413、414、415は、ナビゲーションデバイス10の記憶装置12、13、14、15により格納された地図データと同様の地図データを更に含んでもよい。また、道路区間に関連付けられる基準速度値は、記憶装置412、413、414、415に格納される。基準速度値は、その道路区間の制限速度であってもよく、あるいは通常の状況下において達成可能な最高速度であってもよい。それら基準速度値は、ある特定のルートを移動するのに必要となる可能性のある時間を判定するため、ルートを計画する時に重要な情報となることが理解されるだろう。この情報は、最速ルート等の最適なルートを計算するのに必要とされる。
【0062】
第1の実施形態
第1の実施形態によると、サーバ40は、入出力装置425を使用して衛星30からデータを受信するように構成される。データは、地球の地表の少なくとも1枚の写真を含む。データは、写真の識別を含むヘッダを更に含む。また、ヘッダは、例えば経度、緯度、縮尺である地図座標等の基準系で表される写真の場所及び向きに関する情報を含んでもよい。
【0063】
プロセッサユニット411は、周知のパターン認識アルゴリズムを使用して、衛星30から受信した少なくとも1枚の写真において道路を認識及び識別する。識別は、認識された道路又は道路区間が高速道路A1又はE425として識別されることを意味する。認識ステップは、パターン認識アルゴリズムに対する入力として記憶装置412、413、414、415に格納された地図データを使用することにより簡単化されてもよい。ヘッダ情報は、少なくとも1枚の地上写真を地図データとマッチングするために使用されてもよい。対象道路の場所が既に分かっている場合にその道路を更に容易に見つけられるため、そのマッチングに基づいて、道路はパターン認識アルゴリズムにより更に容易に認識及び識別される。
【0064】
少なくとも1枚の写真において道路が認識された後、プロセッサユニット411は、道路のある特定の区間の複数の車両50を認識するように構成される。また、当業者に周知のパターン認識アルゴリズムがこれに対して使用されてもよい。
【0065】
これにより、道路のその区間に対する平均車両密度(例えば、100メートル毎の車両数)又は平均車間距離(例えば、50メートル)は、単一の写真に基づいて計算される。車両50の速度は、道路の交通量に依存することが周知である。すなわち、車両50の必要車間距離は、速度が速くなるのに伴い長くなる。従って、車両50の平均速度は、平均車両密度又は平均車間距離から計算又は推定される。当然、車両50の平均速度を判定する時に最高速度が考慮されてもよい。
【0066】
これは、特定の車両密度に対応する平均速度を含む所定のテーブルに対する入力として、平均車両密度又は平均車間距離を使用することにより行なわれ得る。テーブルは、記憶装置412、413、414、415に格納されてもよい。しかし、平均速度は、平均車両密度又は平均車間距離を入力として有する所定のアルゴリズムを使用して計算されてもよい。
【0067】
その道路区間に対する平均速度は、記憶装置412、413、414、415に格納された基準速度値と比較される。差分が検出されるか又は差分がある特定の閾値を超える場合、信号は交通状況に関する情報を含んでナビゲーションデバイス10に送信され得る。信号は、道路区間に関連付けられる新しく更新された基準速度を更に含んでもよい。この情報は、ナビゲーションデバイス10により格納され、「最適なルート」を計算する時又は既に計画されたルートを別のルートにする時に使用されてもよい。ルートを計画する時、先に格納された基準速度値を使用するのではなく、更新された基準速度値が使用される。
【0068】
道路区間に対する平均速度は、特に道路区間に関連付けられていない一般的な最低速度と単純に比較されてもよい。例えば、平均速度が最低速度を下回る場合に信号が送信されるようにする。この場合、基準速度は道路又は道路区間毎に格納される必要はなく、1つの一般的な最低速度のみが格納される。
【0069】
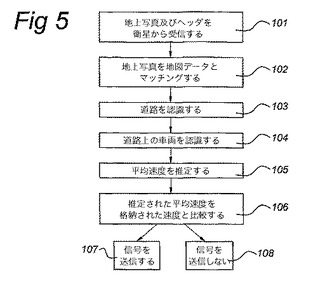
図5は、サーバ40のプロセッサユニット411により実行されるプログラムを示すフローチャートである。第1のステップ101において、サーバ40の入出力装置425は、衛星30から少なくとも1枚の地上写真を受信する。地上写真は、ヘッダ情報を更に含んでもよい。
【0070】
第2のステップ102において、プロセッサユニット411は、後続するパターン認識ステップを簡単化するために、地上写真を記憶装置412、413、414、415に格納された地図データとマッチングする。
【0071】
第3のステップ103において、プロセッサユニット411は、第1のパターン認識ステップを実行して、衛星30から受信した地上写真において道路及び他の関連項目を認識及び識別する。
【0072】
更なるステップ104において、プロセッサユニット411は、先に認識された道路上の車両を認識するために更なるパターン認識アルゴリズムを適用する。
【0073】
更なるステップ105において、プロセッサユニット411は、ある特定の道路又は道路区間の車両の平均速度を推定する。これは、例えば、平均車両密度又は平均車間距離を計算することにより行なわれ得る。平均車両速度は、記憶装置412、413、414、415のうち1つ以上に格納される所定のアルゴリズムを使用して平均車両密度又は平均車間距離から推定されてもよいし、あるいは推定の平均車両速度をルックアップするために、計算された平均車両密度又は平均車間距離を格納されているテーブルに対する入力として使用することにより推定されてもよい。
【0074】
第6のステップ106において、推定された平均速度は、記憶装置412、413、414、415に格納された道路区間に関連付けられる基準速度と比較される。差分があると決定されるか又は差分がある所定の閾値を超える場合、プロセッサユニット411は信号を編集し、入出力装置425を制御してステップ107に示すように信号を送信する。一方、差分があると決定されないか又は差分が所定の閾値を超えない場合、ステップ108に示すように信号は送信されない。
【0075】
信号は、ナビゲーションデバイス10に送信され得る。信号は、同報通信モードで送信されてもよいが、以下に更に説明するように、例えばナビゲーションデバイス10の要求時に2点間モードでナビゲーションデバイス10に送信されてもよい。信号は、変化した道路状態をナビゲーションデバイス10に通知し、更新された基準速度及びそれら更新された基準速度が適用される道路区間又は道路を含んでもよい。
【0076】
平均車両密度又は平均車間距離を判定する他の手段は、撮影され且つ識別された道路の「色」、すなわちコントラストを判定することである。交通量が多い場合、道路は車両50で満たされ、道路の「色」は車両のない道路の色とは異なる。車両のない道路は、ある特定の単色(暗色)で塗りつぶされる。車両50の存在により、その塗りつぶされた単調な色は変化する。交通状態は、映像において特定の車両50を認識することにより判定されるのではなく、単色(暗色)で塗りつぶされた道路又は道路区間に属する写真の画素数ndarkとその道路又は道路区間に属する他の色の画素数notherとの比Rを比較することにより判定される。
【0077】
【数1】

【0078】
ある所定の閾値を下回る等、比Rが小さい場合、写真は多くの道路領域を見せている。よって、交通量が通常であると考えられ、信号を生成する必要はない。ある特定の閾値を超える等、比Rが大きい場合、交通量は多いと考えられ、信号が生成される。
【0079】
この別の手段を実行するために、サーバ40は、道路に属する画素と車両50に属する画素とを区別できる必要がある。これは、暗さに対する閾値を判定し且つ画素の暗さと閾値とを比較することにより単純に行なわれてもよい。まず全ての暗色の画素を見つけ、動的に閾値を計算することもできる。
【0080】
本実施形態は、夜間に使用されてもよいことが理解されるだろう。車両50を直接認識するのではなく、ヘッドライトが発する光を検出することにより、車両50の存在及び場所が容易に判定される。
【0081】
車両の平均速度は、例えば車両の動きによる写真中の車両のぼけの量を使用する等の異なる手段で計算されてもよい。そのために、地上撮影装置31により使用される露出時間は、0.5秒等の相対的に長い時間が選択されてもよい。例えば50km/hの速度で、車両は0.5秒で約7メートル移動する。
【0082】
ぼけの量に基づいて、個々の車両50の速度は、ぼけの長さを測定することにより判定される。写真の縮尺を考慮して、車両が移動した距離が計算される。これに基づき、車両の速度は容易に計算される。これは、写真の全ての車両に対して行なわれる。写真の車両50の平均速度は、個別に判定された速度値を平均することにより計算される。これについては、第2の実施形態において更に詳細に説明する。
【0083】
第2の実施形態
第2の実施形態によると、衛星30は、同一の地上領域の少なくとも2枚の連続した地上写真を撮るように構成される。少なくとも2枚の地上写真は、10秒等の所定の時間間隔で撮られる。
【0084】
写真は、送信装置32を使用してサーバ40に送信される。サーバ40は、入出力装置425を使用して少なくとも2枚の写真を受信するように構成される。
【0085】
少なくとも2枚の写真は、写真の識別を有するヘッダを更に含んでもよい。ヘッダは、写真の経度、緯度、縮尺、時点で表される写真の場所及び向きに関する情報を含んでもよい。
【0086】
プロセッサユニット411は、周知のパターン認識アルゴリズムを使用して、衛星30から受信した少なくとも2枚の写真において道路を識別する。この認識ステップは、パターン認識アルゴリズムに対する入力として記憶装置412、413、414、415に格納された地図データを使用することにより簡単化されてもよい。ヘッダ情報は、少なくとも2枚の地上写真を地図データとマッチングするために使用されてもよい。道路を見つけるべき場所が既に分かっている場合にはその道路を更に容易に見つけられるため、そのマッチングに基づいて、道路はパターン認識アルゴリズムにより更に容易に認識及び識別される。
【0087】
少なくとも2枚の写真において道路が認識された後、プロセッサユニット411は、道路のある特定の区間の車両50を認識するように構成される。また、当業者に周知のパターン認識アルゴリズムがこれに対して使用されてもよい。
【0088】
異なる連続する写真を比較することにより、個々の車両の速度は計算される。第1の写真において認識された車両50の位置を第2の写真において認識された同一車両50の位置と比較する技術が使用される。特に上方から撮影される場合、殆どの車両が同様に見えるため、周知の計算アルゴリズムは、第1の写真の車両を第2の写真の同一車両に結び付けるように構成される。これは、流体力学において使用される粒子画像流速測定法により周知であるように、第1の写真と第2の写真との間の相関値を計算することにより行なわれてもよい。
【0089】
計算を簡単化する境界条件を課す計算アルゴリズムに対する入力として追加の情報が提供されてもよい。境界条件は、道路区間の車両が動く方向が全て同一方向であるということであってもよい。更なる条件は、互いに近接する車両の速度の差分が所定の閾値を超えないということであってもよい。
【0090】
計算アルゴリズムを更に簡単化するために、特定の特徴を有する車両のみが考慮されるようにしてもよい。これにより、第2の写真において同一車両を容易に認識できる。例えば、トラック及び/又は赤い自動車が容易に認識できるため、アルゴリズムはそれらのみを考慮するように構成されてもよい。
【0091】
少なくとも1台の車両の位置が第1の写真において判定され、同一車両の位置が第2の写真において判定される場合、車両の速度は計算される。第1の写真及び第2の写真の時点が例えばヘッダ情報から分かるため、第1の写真と第2の写真との間の時間間隔Δtが計算される。少なくとも1台の車両が移動する距離は、第1の写真及び第2の写真におけるその車両の位置を比較することにより判定される。第1の写真及び第2の写真の縮尺はヘッダ情報から分かるため、実際の距離Δxは写真内で測定された距離から容易に計算される。最後に、少なくとも1台の車両50の速度vが計算される。
v= Δx/Δt
2台以上の車両50の対応する位置が第1の写真及び第2の写真において判定される場合、速度viは車両毎に計算され得る。
vi = Δxi/Δt
式中、i = 1, 2, ..., imaxは車両50を表す。これにより、判定された全ての個々の車両速度viを平均することにより、平均車両速度vaverageが道路区間に対して計算され得る。
【0092】
【数2】
【0093】
その道路区間に対する平均速度vaverageは、記憶装置412、413、414、415に格納されたある特定の道路又は道路区間に関連付けられる基準速度値と比較される。差分が検出されるか又は差分がある特定の閾値を超える場合、信号は変化した道路状況に関する情報を含んでナビゲーションデバイス10に送信されてもよい。決定された平均速度vaverageは、ある特定の道路又は道路区間に関連付けられていない一般的な最低基準速度と比較されてもよい。そのような一般的な基準速度は、例えば10km/hの値を有してもよい。平均速度が10km/hを下回る場合、交通渋滞していると仮定する。
【0094】
信号は、その道路又は道路区間に関連付けられる新しく更新された基準速度を含んでもよい。この情報は、ナビゲーションデバイス10により格納され、「最適なルート」を計算する時又は既に計画されたルートを別のルートにする時に使用されてもよい。
【0095】
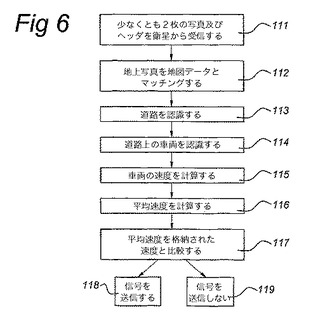
図6は、第2の実施形態に従って、サーバ40のプロセッサユニット411により実行されるプログラムを示すフローチャートである。第1のステップ111において、サーバ40の入出力装置425は、少なくとも2枚の地上写真を衛星30から受信する。少なくとも2枚の地上写真はヘッダ情報を更に含む。
【0096】
第2のステップ112において、プロセッサユニット411は、後続するパターン認識ステップを簡単化するために、少なくとも2枚の地上写真を記憶装置412、413、414、415に格納された地図データとマッチングする。
【0097】
第3のステップ113において、プロセッサユニット411は、第1のパターン認識ステップを実行して、衛星30から受信した少なくとも2枚の地上写真において道路及び他の関連項目を認識する。
【0098】
更なるステップ114において、プロセッサユニット411は、先に認識された道路上の車両50を認識するために更なるパターン認識アルゴリズムを適用する。
【0099】
更なるステップ115において、プロセッサユニット411は、第1の写真における車両50の位置と第2の写真における同一車両50の位置とを比較し、比較した位置に基づいて車両50の個々の速度を計算するために計算アルゴリズムを適用する。
【0100】
次のステップ116において、車両の平均速度は、先のステップ115において計算された車両50の個々の速度から計算される。
【0101】
第7のステップ117において、平均速度は、記憶装置412、413、414、415に格納された道路区間に関連付けられた速度(基準速度)と比較される。差分が判定されるか又は差分がある所定の閾値を超える場合、プロセッサユニット411は、信号を編集し、入出力装置425を制御してステップ118に示すように信号を送信する。信号は、例えばある特定の道路区間又は道路に対する更新された基準速度値を含む。差分が判定されないか又は差分が所定の閾値を超えない場合、ステップ119に示すように信号は送信されない。
【0102】
車両の速度を判定するのに3枚以上の写真が使用されてもよいことは理解されるだろう。例えば、3枚の連続する写真が使用される場合、個別の車両の速度は、第1の写真及び第2の写真に基づいて計算されてもよく且つ第2の写真及び第3の写真に基づいて計算されてもよい。双方の計算の結果を平均することにより、より正確な速度viを取得してもよい。
【0103】
第1の写真の車両が第2の写真の車両に結び付けられる時、車両が同一車両でない場合、当然エラーが発生する。これは、3枚以上の写真を使用することにより防止される。第1に、第1の写真及び第2の写真に基づいて車両50の速度が計算される。その計算された速度に基づいて、第3の写真の車両の位置が予測される。(類似する)車両50が第3の写真において予測した位置又は予測した位置の近傍に見つけられない場合、第1の写真と第2の写真とのマッチングは正確ではなかった。当然、(類似する)車両50が第3の写真において予測した位置に見つけられなかったことは、車両の速度の突然の変化に起因する可能性がある。
【0104】
サーバ40により生成された信号は、例えば図3に示すように車両50に搭載されたナビゲーションデバイス10に送信されてもよい。これについては以下に更に説明する。
【0105】
本実施形態は、夜間に使用されてもよいことが理解されるだろう。車両50を直接認識するのではなく、ヘッドライトが発する光を検出することにより、車両の存在及び場所が判定されてもよい。
【0106】
第3の実施形態
更なる実施形態によると、ナビゲーションデバイス10は、上述のサーバ40の機能を実行するように構成されてもよい。これは、ナビゲーションデバイス10が少なくとも1枚の写真を受信し、写真を地図データとマッチングし、写真の道路及び道路区間を認識し、車両を認識し、ある特定の道路又は道路区間に対する平均速度を推定し、その道路又は道路区間に関連付けられる格納された基準速度と推定された基準速度とを比較することができることを意味する。これは、1枚の写真又はより多くの写真に基づいて上述の全ての種類の技術を使用して行なわれてもよい。
【0107】
従って、ナビゲーションデバイス10は、図7に概略的に示されるようにサーバ40を省略し、入出力装置25を使用して衛星30と直接通信するように構成されてもよい。衛星30は、1枚以上の写真をナビゲーションデバイス10に送出する。ナビゲーションデバイス10は、サーバ40に関して上述したステップを実行するように構成される。このように、ナビゲーションデバイス10は、それ自体の交通情報を計算できる。
【0108】
別の手段によると、ナビゲーションデバイス10及び衛星30は、少なくとも1つの中間サーバ(不図示)を介して通信するように構成されてもよい。しかし、本実施形態によると、この中間局は、衛星30からナビゲーションデバイス10に写真を送信し且つ上述のサーバ40の機能性を実行しないように構成される。
【0109】
本実施形態によると、ナビゲーションデバイス10は、衛星30(又は中間サーバ)にある特定の場所の最新の写真を送信するように要求してもよい。その場所は、例えば現在の位置に基づくか又は計画されたルートに基づいてナビゲーションデバイス10により判定さる。
【0110】
第4の実施形態
上述の全ての実施形態は、一般にある特定の道路又は道路区間に対する交通量又は平均速度の更新された基準速度に関する情報以上の交通情報を検索及び配信するために使用されてもよいことが理解されるだろう。上述の全ての技術は、天候条件、駐車場の空き状況等の全ての種類の交通状態に関する情報を取得するために使用されてもよい。
【0111】
例えば、サーバ40は、地上写真に基づいて駐車場に空きがあるかを判定してもよい。これは、例えば、上述のように、まず写真と格納された地図データとをマッチングすることにより行なうことができる。地図データは、駐車場の位置に関する情報を含む駐車場に関する詳細な情報を含み得る。次に、サーバ40は、例えばパターン認識技術を使用して、車両50が駐車場に存在するか否かを認識する。駐車場の空き状況に関する情報は、入出力装置425及び入出力装置25を使用してサーバ40によりナビゲーションデバイス10に送信される。
【0112】
情報は、ユーザに提示される。あるいは、車両50を使用可能な駐車場に案内するか又は駐車場に空きがない場合には別の駐車場に案内するために、ナビゲーションデバイス10が情報を使用してもよい。
【0113】
当然、本実施形態は、サーバ40を使用せずに、本実施形態のステップを実行する機能をナビゲーションデバイス10に備えることにより実行されてもよい。
【0114】
上述の全ての実施形態は、衛星30から受信した写真にデータ処理ステップを適用することにより改善されてもよい。それら処理ステップは、輝度、コントラストを調整することを含んでもよい。また、全ての種類の適切なフィルタが使用されてもよい。雨及び/又は曇りの状態における画質を向上させる技術が使用されてもよい。
【0115】
更に、上述の全ての実施形態は、暗く且つ視界の悪い夜間に使用されてもよい。この場合、車両50は直接認識されない。しかし、例えば、車両50の(ヘッド)ライトが発する光を検出することにより、車両50は容易に認識得る。
【0116】
車両50の(ヘッド)ライトの発光による車両50の認識は、上述の全ての実施形態において使用され、交通の密度の判定、映像において車両のぼけの量を測定することによる平均速度の判定、暗い画素と明るい画素との間の比の判定、2枚以上の写真の比較等を行なう。
【0117】
カメラ31は、人間の目に不可視の電磁放射を感知可能であるカメラ等の任意の種類のカメラであってもよい。カメラ31は、夜間の使用を可能にする赤外線カメラであってもよい。
【0118】
上述の全ての実施形態において、サーバ40は、関連する交通状態が判定される場合にナビゲーションデバイス10に信号を送出するように構成される。この信号は、例えば道路区間の指示及び道路区間に関連付けられる新しい基準速度を含む変化した道路状態に関する情報を含んでもよい。ナビゲーションデバイス10に送信されるこの情報は、新しいルートを計画するか又は既に計画されたルートを再計画する時にナビゲーションデバイス10により使用されてもよい。
【0119】
サーバ40は、入出力装置425を使用してナビゲーションデバイス10にその信号を直接送出してもよい。しかし、サーバ40は、1つ以上の他の衛星(可能性として衛星30を含む)又は地上局を介してナビゲーションデバイス10に信号を送出してもよい。全ての種類の送信技術及び/又はプロトコルは、サーバ40からナビゲーションデバイス10に信号を送信するために使用されてもよいことが理解されるだろう。
【0120】
ナビゲーションデバイス10は、送信された信号を受信するために入出力装置25を具備する。ナビゲーションデバイス10のプロセッサユニット11は、信号を記憶装置12、13、14、15に格納し、ルートを計画するか又は既に計画されたルートを別のルートにする時に情報を使用するように構成される。
【0121】
更に別の手段によると、サーバ40は、道路状態の変化した付近のみにおけるナビゲーションデバイス10に信号を送信するように構成されてもよい。これは、道路状態の変化した付近のみにおいて信号を送信することによって行なわれてもよい。
【0122】
本発明の特定の実施形態を説明したが、本発明は上述以外の方法で実現されてもよいことが理解されるだろう。例えば、本発明は、先に開示された方法を記述する機械可読命令の1つ以上のシーケンスを含むコンピュータプログラムの形態をとってもよく、あるいはそのようなコンピュータプログラムを格納したデータ記憶媒体(例えば、半導体メモリ、磁気ディスク又は光ディスク)の形態をとってもよい。全てのソフトウェアコンポーネントがハードウェアコンポーネントとして形成されてもよいことは、当業者には理解されるだろう。
【0123】
上記説明は、例示することを意図しており、限定することを意図しない。従って、以下の請求の範囲から逸脱せずに、説明された本発明に対して変形が行なわれてもよいことが当業者には明らかとなるだろう。
【図面の簡単な説明】
【0124】
【図1】ナビゲーションデバイスを概略的に示す概略ブロック図である。
【図2】ナビゲーションデバイスを概略的に示す図である。
【図3】本発明の一実施形態に関わるシステムを概略的に示す図である。
【図4】本発明の一実施形態に関わるサーバを概略的に示す図である。
【図5】本発明の一実施形態を概略的に示すフローチャートである。
【図6】本発明の別の実施形態を概略的に示すフローチャートである。
【図7】本発明の更なる実施形態に関わるシステムを概略的に示す図である。
【技術分野】
【0001】
発明の分野
本発明は、交通情報を判定する方法に関する。また、本発明は、その方法を実行するように構成された装置に関する。
【背景技術】
【0002】
GPS(Global Positioning System)に基づく従来のナビゲーションデバイスは周知であり、車載ナビゲーションシステムとして広く採用されている。そのようなGPSに基づくナビゲーションデバイスは、自身の地球上における位置を測定する能力を有する外部(又は内部)のGPS受信機と通信を行う機能を含む演算装置に関係する。更に、演算装置は、出発地の住所と目的地の住所との間のルートを判定する能力を有する。出発地の住所と目的地の住所は、演算装置のユーザにより入力される。通常、演算装置は、地図データベースから出発地の住所の場所と目的地の住所の場所との間の「最善」又は「最適」なルートを計算することがソフトウェアにより可能になる。「最善」又は「最適」なルートは、所定の基準に基づいて決められ、必ずしも最速又は最短のルートである必要はない。
【0003】
ナビゲーションデバイスは、通常は車両のダッシュボードに搭載されるが、車両に搭載されたコンピュータ又は自動車のラジオの一部として構成されてもよい。ナビゲーションデバイスは、PDA等の携帯型のシステム(の一部)であってもよい。
【0004】
GPS受信機から得られる位置情報を使用することにより、演算装置は、定期的に自装置の位置を判定し、車両の現在の位置をユーザに対して表示できる。ナビゲーションデバイスは、地図データを格納するメモリ素子及び地図データの選択部分を表示するディスプレイを具備してもよい。
【0005】
更にナビゲーションデバイスは、ディスプレイ上に表示され且つ/又はスピーカからの可聴信号として生成される適切なナビゲーション指示により判定されたルートの案内の方法を指示できる(例えば、「100m先を左折する」)。達成されるべき動作を示す図形(例えば、前方を左折することを示す左矢印)は、ステータスバーに表示され、地図自体には該当する分岐点/曲がり角等に重ね合わされる。
【0006】
運転者がナビゲーションシステムにより計算されたルートに沿って自動車を運転している時に、運転者によりルートの再計算が開始されることを許容する車載ナビゲーションシステムが知られている。これは、車両が建築工事又は交通渋滞に直面した場合に有用である。
【0007】
また、ナビゲーションデバイスにより展開されるルート計算アルゴリズムの種類をユーザが選択できることも周知であり、例えば、「通常」モード及び「高速」モード(最短時間でルートを計算するが、通常モード程多くの代替ルートを調査しない)から選択する。
【0008】
また、ユーザが規定した基準でルートを計算できることが周知である。例えば、ユーザは、景色のよいルートがデバイスにより計算されることを好む。デバイスのソフトウェアは、種々のルートを計算し、例えば、景色が美しい所としてタグ付けされる興味のある場所(名所(POI)として知られた場所)をルートに沿って最も多く含むルートを更に有利に重み付けする。
【0009】
出発地の住所と目的地の住所との間のルートを判定するために、ナビゲーションデバイスは地図データを使用する。格納された好みの設定又は入力された好みの設定(最短ルート、最速ルート、景色のよいルート、…)に依存して、ナビゲーションデバイスは、格納された地図データを使用して「最適な」ルートを計算する。しかし、「最適な」ルートは、道路の現在の状況に依存して時間毎に異なる。例えば「最適な」ルートは、道路のある特定の区間における車両の量、予想される交通渋滞、混雑、迂回路等に依存する。
【0010】
米国特許出願公開第2002/0128770A1号において、道路の状況に関するリアルタイム情報を運転者に提供するシステムが説明される。システムは、カメラを使用して地上の映像を作成する。カメラは、地上に置かれたカメラであってもよいし、あるいは衛星に置かれたカメラであってもよい。サーバは、クライアントの車両に搭載されるナビゲーションデバイスに映像(の一部)を送信する。ナビゲーションデバイスは、受信した映像を表示するように構成され、クライアントが道路の状況を評価することを可能にする。
【0011】
周知のナビゲーションデバイスは、変化する道路の状況及び状態を考慮するように構成される。そのようなナビゲーションデバイスは、交通渋滞に関する情報をサーバから受信するように構成される。その情報は、ルートを計画する時にナビゲーションデバイスにより使用されるか、あるいは既に計画されたルートを別のルートにするために使用されてもよい。例えば、交通渋滞に関する情報は、通過する車両の速度を測定する路面に埋設された検出システムを使用して収集される。
【特許文献1】米国特許出願公開第2002/0128770A1号
【発明の開示】
【発明が解決しようとする課題】
【0012】
本発明の目的は、交通情報を収集する別の手段を提供する方法を提供することである。
【課題を解決するための手段】
【0013】
この目的を達成するために、本発明は上述に関わる方法を提供する。方法は:
−入出力装置を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し;
−プロセッサユニットを使用して、少なくとも1枚の受信した写真において少なくとも1つの道路区間の複数の車両を認識し;
−少なくとも1台の認識された車両に基づいて交通情報を判定することを含むことを特徴とする。
【0014】
この方法は、交通情報を収集する別の手段を提供する。方法は、演算装置により実行される。例えば衛星で撮影された写真を使用して交通情報を収集することは、交通情報を収集するのに容易で信頼性のある手段である。
【0015】
本発明の一実施形態によると、複数の車両は、パターン認識技術を使用して認識される。これは、コンピュータ等を使用して車両を認識するのに容易で信頼性のある手段である。
【0016】
本発明の一実施形態によると、パターン認識技術に対する入力として地図データが使用される。これにより、自動車が存在すると予想される場所が地図データから既に分かっている場合には自動車が更に容易に認識されるため、パターン認識は向上する。
【0017】
本発明の一実施形態によると、方法は、少なくとも1枚の受信した写真に基づいて複数の認識された車両の速度を計算することを更に含む。これは、道路又は道路区間の車両の量を判定し且つ道路又は道路区間の車両の平均速度を推定することにより行なわれてもよい。しかし、車両の速度を計算又は推定するのに他の技術が使用されてもよい。
【0018】
本発明の一実施形態によると、複数の車両の速度は、
−道路区間に対する車両密度を判定し、
−道路区間の複数の認識された車両の平均速度を車両密度から推定することにより計算される。これは、単一の写真にのみ基づいて車両の平均速度を推定するのに有利な手段である。交通量が更に多くなると車の流れが遅くなることは周知である。
【0019】
本発明の一実施形態によると、道路区間に対する車両密度は、道路又は道路区間に属する写真の第1の色の画素数(ndark)と他の色の画素数(nother)との比を判定することにより判定される。この比は、道路又は道路区間の交通量を示す。本実施形態によると、パターン認識技術を採用する必要はない。
【0020】
本発明の一実施形態によると、複数の認識された車両の速度は、複数の認識された車両のぼけの量を判定することにより計算される。本実施形態によると、車両の速度は単一の写真に基づいて計算される。
【0021】
本発明の一実施形態によると、方法は:
−第1の写真が第1の時点で作成され且つ第2の写真が第2の時点で作成される地球の一部を示す少なくとも2枚の写真を撮影装置から受信し、
−第1の写真において複数の車両を認識し、
−第2の写真において複数の車両を認識し、
−第1の写真及び第2の写真の双方において認識された複数の車両の少なくとも一部が第1の写真と第2の写真との間で移動した距離を計算し、
−計算された距離、並びに第1の時点及び第2の時点を使用して複数の認識された車両の速度を計算することを含む。認識された車両の速度は、2枚の写真に基づいて直接的で信頼性のある手段で計算される。
【0022】
本発明の一実施形態によると、方法は、複数の認識された車両の計算された速度と複数の認識された車両が認識された道路区間に関連付けられる基準速度とを比較することを更に含む。この比較に基づいて、交通渋滞等があるか等、道路状態が変化したかを判定できる。
【0023】
本発明の一実施形態によると、方法は、複数の認識された車両の計算された速度と所定の最低速度とを比較することを更に含む。本実施形態によると、各道路又は各道路区間に対する基準速度を格納する必要はなく、それによりメモリ空間が節約される。判定された速度は最低速度と比較される。
【0024】
本発明の一実施形態によると、方法は、
−認識された車両の位置を判定し、
−判定された位置と駐車場に関する情報を含む地図データとを比較し、
−駐車場の空き状況を判定することを更に含む。このように、使用可能な駐車場にユーザを案内するために使用される駐車場の空き状況に関する情報が収集される。
【0025】
本発明の一実施形態によると、方法は、
−判定された交通情報を含む信号を編集し、
−編集された信号を送信することを更に含む。判定された交通情報は、例えば少なくとも1台の認識された車両の計算された速度又は駐車場の空き状況に関する情報であってもよい。交通情報が計算された速度に関するものである時、少なくとも1台の認識された車両の計算された速度が基準速度から所定の閾値以上異なるか又は所定の最低速度を下回る場合、信号は単に編集され且つ送信されてもよい。信号は同報通信されてもよいが、2点間通信モード(サーバからナビゲーションデバイス)で送信されてもよい。
【0026】
更なる面によると、本発明は、入出力装置、記憶装置及び処理ユニットを具備し、処理ユニットが入出力装置を使用して他のデバイスと通信するように構成され且つ記憶装置と通信するように構成されるデバイスに関する。デバイスは、
−入出力装置を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し、
−処理ユニットを使用して、少なくとも1枚の受信した写真において少なくとも1つの道路区間の複数の車両を認識し、
−複数の認識された車両に基づいて交通情報を判定するように構成されることを特徴とする。
【0027】
本発明の一実施形態によると、デバイスは、判定された交通情報に基づいて信号を編集し且つ入出力装置を使用して信号を送信するように構成されたサーバである。判定された交通情報を含む信号を例えばナビゲーションデバイスに送信することにより、ナビゲーションデバイスはその情報を使用してルートを計画できる。
【0028】
本発明の一実施形態によると、デバイスは、ルートを計画するように構成されたナビゲーションデバイスである。
【0029】
本発明の一実施形態によると、ナビゲーションデバイスは、判定された交通情報に基づいてルートを計画するように構成される。
【0030】
本発明の更なる面は、本発明に関わるデバイスを具備する車両に関する。
【0031】
更なる面によると、本発明は、コンピュータにロードされた時に本発明に関わる方法を実行するように構成されたコンピュータプログラムに関する。
【0032】
更なる面によると、本発明は、本発明に関わるコンピュータプログラムを含むデータ記憶媒体に関する。
【発明を実施するための最良の形態】
【0033】
添付の概略図を参照して、本発明の実施形態を例として説明する。図中、対応する図中符号は対応する部分を示す。
【0034】
図1は、算術演算を行なうプロセッサユニット11を具備するナビゲーションデバイス10の一実施形態を示す概略ブロック図である。プロセッサユニット11は、ハードディスク12、読み出し専用メモリ(ROM)13、電気的消去可能プログラマブルROM(EEPROM)14及びランダムアクセスメモリ(RAM)15等の命令及びデータを格納する記憶装置と通信するように構成される。記憶装置は、地図データを含んでもよい。この地図データは、2次元地図データ(緯度及び経度)であってもよいが、第3の次元(高度)を含んでもよい。地図データは、ガソリンスタンド、興味のある場所に関する情報等の追加の情報を更に含んでもよい。また、地図データは、道路沿いの建物及び物体の形状に関する情報を含んでもよい。
【0035】
プロセッサユニット11は、キーボード16及びマウス17等の1つ以上の入力装置と通信するように構成されてもよい。キーボード16は、例えば、タッチスクリーンであるディスプレイ18に提供される仮想キーボードであってもよい。プロセッサユニット11は、例えば、フロッピディスク20又はCDROM21を読み取るために、ディスプレイ18、スピーカ29及び1つ以上の読み取り装置19等の1つ以上の出力装置と通信するように更に構成されてもよい。ディスプレイ18は、一般的なコンピュータディスプレイ(例えば、LCD)であってもよく、あるいは計測データを自動車のフロントガラスに投影するために使用されるヘッドアップディスプレイ等の投影型ディスプレイであってもよい。ディスプレイ18は、タッチスクリーンとして機能するように構成されるディスプレイであってもよい。タッチスクリーンは、ユーザが指でディスプレイ18に触れることにより命令及び/又は情報を入力することを可能にする。
【0036】
プロセッサユニット11は、入出力装置25を使用して他の演算装置又は通信装置と通信するように更に構成されてもよい。入出力装置25は、ネットワーク27を介して通信を行なえるように構成されて示される。
【0037】
スピーカ29は、ナビゲーションデバイス10の一部として構成されてもよい。ナビゲーションデバイス10が車載ナビゲーションデバイスとして使用される場合、ナビゲーションデバイス10は、自動車のラジオ及びボードコンピュータ等のスピーカを使用してもよい。
【0038】
プロセッサユニット11は、ナビゲーションデバイス10の位置に関する情報を提供するGPS受信機等の位置決め装置23と通信するように更に構成されてもよい。本実施形態によると、位置決め装置23はGPSに基づく位置決め装置23である。しかし、ナビゲーションデバイス10には、任意の種類の位置検知技術を実装してもよく、GPSに限定されないと理解されるであろう。従って、ナビゲーションデバイス10は、欧州のガリレオシステム等の他の種類のGNSS(global navigation satellite system:グローバルナビゲーションサテライトシステム)を使用して実現することもできる。同様に、ナビゲーションデバイス10は、衛星を使用する位置/速度システムに限定されず、地上ビーコン又はデバイスが地理的な場所を判定することを可能にする任意の他の種類のシステムを使用しても同様に展開される。
【0039】
しかし、当業者に周知の更なる及び/又は他の記憶装置、入力装置及び読み取り装置が提供されてもよいことが理解されるべきである。更に、それら装置のうち1つ以上の装置は、必要に応じてプロセッサユニット11から物理的に遠く離れて配置されてもよい。プロセッサユニット11は1つのボックスで示されるが、当業者には周知であるように、互いに遠く離れて配置され且つ1つの主プロセッサにより制御されるか又は同時に機能するいくつかの処理ユニットを含んでもよい。
【0040】
ナビゲーションデバイス10は、コンピュータシステムとして示されるが、本明細書で説明される機能を実行するように構成されるアナログ及び/又はデジタル及び/又はソフトウェア技術を使用する任意の信号処理システムであってもよい。図1に示すナビゲーションデバイス10は、複数の構成要素から構成されるものとして示すが、単一のデバイスとして構成されてもよいことが理解されるであろう。
【0041】
ナビゲーションデバイス10は、Navigatorと呼ばれるTomTom B.V.のナビゲーションソフトウェア等のナビゲーションソフトウェアを使用してもよい。ナビゲータソフトウェアは、Compaq iPaq等のタッチスクリーンの(すなわち、スタイラスで制御される)PocketPC搭載PDAデバイス、並びに一体型GPS受信機23を有するデバイス上で実行してもよい。組み合わされたPDA及びGPS受信機システムは、車載ナビゲーションシステムとして使用されるものとして設計される。本発明は、一体型GPS受信機/コンピュータ/ディスプレイを有するデバイス、あるいは車両以外による使用(例えば、歩行者)又は自動車以外の車両(例えば、航空機)に対して設計されたデバイス等のナビゲーションデバイス10の任意の他の構成で実現されてもよい。
【0042】
図2は、上述のようなナビゲーションデバイス10を示す。
【0043】
ナビゲータソフトウェアは、ナビゲーションデバイス10上で実行する場合、図2に示すようにディスプレイ18に通常のナビゲーションモード画面をナビゲーションデバイス10に表示させる。このビューは、テキスト、記号、音声ガイダンス及び動画地図の組合せを使用して運転指示を提供してもよい。重要なユーザインタフェース要素は、3D地図が画面の殆どを占有することである。尚、その地図は2D地図として示されてもよい。
【0044】
地図は、ナビゲーションデバイス10が動く方向が常に「上姿勢」になるように回転されたナビゲーションデバイス10の位置及びその周囲を示す。ステータスバー2は、画面の下1/4に渡ってもよい。ナビゲーションデバイス10の現在の場所(ナビゲーションデバイス10自体が従来のGPS位置探索を使用して判定する)及びその姿勢(移動する方向から推測される)は、位置矢印3により示される。デバイスにより計算されたルート4(メモリ素子11、12、13、14、15の地図データベースに格納された地図データに適用されるメモリ素子11、12、13、14、15に格納されたルート計算アルゴリズムを使用して)は、陰影をつけた経路で示される。ルート4において、全ての主な動作(例えば、角、交差点、ロータリー等を曲がる)は、ルート4に重なる矢印5により概略的に示される。ステータスバー2は、左側に次の動作6(ここでは、右折)を示す概略的なアイコンを更に含む。ステータスバー2は、デバイスにより計算されたルート全体のデータベース(すなわち、選択されるルートを規定する全ての道路及び関連する動作のリスト)から抽出される次の動作までの距離(すなわち、右折−ここでは距離は190メートル)を更に示す。ステータスバー2は、現在の道路名8、到着までの推定時間9(ここでは、35分)、実際の推定到着時間25(4:50pm)及び目的地までの距離26(31.6Km)を更に示す。ステータスバー2は、移動電話と同様の信号強度指標でGPS信号強度等の追加の情報を更に示してもよい。
【0045】
上述したように、ナビゲーションデバイスは、ユーザがナビゲーションメニュー(不図示)を呼び出すことを可能にするタッチスクリーン等の入力装置を具備してもよい。このメニューから、他のナビゲーション機能は開始又は制御される。非常に容易に呼び出される(例えば、地図の表示からメニュー画面まで1ステップである)メニュー画面からナビゲーション機能を選択することを可能にすることにより、ユーザ対話が非常に簡単化されて高速且つ容易になる。ナビゲーションメニューは、ユーザが目的地を入力するオプションを含む。
【0046】
ナビゲーションデバイス10自体の実際の物理的な構造は、一体型GPS受信機23又は外部GPS受信機からのGPSデータ出力以外は任意の従来の携帯型のコンピュータと基本的に異ならない。従って、メモリ素子12、13、14、15は、ルート計算アルゴリズム、地図データベース及びユーザインタフェースソフトウェアを格納する。プロセッサユニット11は、ユーザ入力を解釈及び処理し(例えば、出発地及び目的地の住所を入力するためのタッチスクリーン、並びに全ての他の制御入力を使用して)、最適なルートを計算するルート計算アルゴリズムを展開する。「最適」は、最短時間又は最短距離、あるいは他のユーザに関係する要素等の基準を示してもよい。
【0047】
更に詳細には、ユーザは、タッチスクリーン18、キーボード16等の提供された入力装置を使用して、ナビゲーションデバイス10上で実行するナビゲーションソフトウェアにユーザの出発位置及び要求する目的地を入力する。ユーザは、移動ルートを計算する方法を選択する。ルートを非常に迅速に計算するがルートが最短ではない可能性のある「高速」モード;全ての可能なルートを調べ且つ最短のルートを見つけるが計算時間がより長い「フル」モード等の種々のモードが提供される。例えば、特に美しい景色としてマーク付けされた殆どの名所(興味のある位置)を通過するか又は子供が興味を持つ可能性のある殆どの名所を通過する景色のよいルート、あるいは分岐点が最も少ないルートをユーザが規定する等、他のオプションが可能である。
【0048】
道路自体は、ナビゲーションデバイス10上で実行するナビゲーションソフトウェアの一部である(又は、ナビゲーションソフトウェアによりアクセスされる)地図データベースにおいて線−すなわちベクトル(例えば、道路の始点、終点、方向であり、道路全体は、各々が始点/終点方向パラメータにより一意に規定される数百の部分から構成される)として記述される。地図は、そのような道路ベクトル、興味のある場所(名所)、道路名、公園の境界や川の境界等の他の地理的特徴の集合であり、それらはベクトルに関して規定される。全ての地図の特徴(例えば、道路ベクトル、名所等)は、GPS座標系に対応するか又は関連する座標系で規定され、GPSシステムを介して判定されるデバイスの位置を地図に示される該当の道路に配置することを可能にする。
【0049】
ルート計算は、ナビゲーションソフトウェアの一部である複雑なアルゴリズムを使用する。アルゴリズムは、大量の潜在的に異なるルートに点数をつけるために適用される。ナビゲーションソフトウェアは、景色のよいルート、歴史博物館及びスピードカメラなしとユーザが規定したフルモードスキャン等の基準(又はデバイスのデフォルト)に対してそれらルートを評価する。規定された基準に最もよく適合するルートは、プロセッサユニット11により計算され、ベクトル、道路名及びベクトルの終点で行なわれる動作のシーケンス(例えば、100メートル先でx通りを左折する等、ルートの各道路に沿う所定の距離に対応する)としてメモリ素子12、13、14、15のデータベースに格納される。
【0050】
図3は、本発明に関わるシステムを概略的に示す。
【0051】
図3は、地上撮影装置31及び送信装置32を具備する衛星30を示す。地上撮影装置31は、地上の車両50を撮影するように構成される。車両50は、ナビゲーションデバイス10を含んでもよい。
【0052】
衛星30は、送信装置32を使用して写真をサーバ40に送信する。衛星は、受信機を更に具備してもよい。受信機は送信機32と一体形成されてもよく、それによりトランシーバを形成する。
【0053】
衛星30は、上述のタスクを実行するために追加のデバイスを更に具備してもよいことが当業者には理解されるだろう。衛星30は、例えばプロセッサユニット及びメモリ素子を具備してもよい。プロセッサユニットは、地上撮影装置31を制御して地上のある特定の場所を撮影するようにプログラムされてもよい。写真は、サーバ40に送信される前にメモリ素子に格納されてもよい。サーバ40は受信装置を具備する。受信装置は、例えば入出力装置425であってもよい。
【0054】
サーバ40は、衛星30から遠く離れて位置付けられてもよい。サーバ40は、例えば図4に示すような演算装置であってもよい。
【0055】
図4は、プロセッサユニット411を含むサーバ40の一実施形態を更に詳細に示す概略ブロック図である。プロセッサユニット411は、ハードディスク412、読み出し専用メモリ(ROM)413、電気的消去可能プログラマブルROM(EEPROM)414及びランダムアクセスメモリ(RAM)415等の命令及びデータを格納する記憶装置と通信するように構成される。プロセッサユニット411は、算術演算を実行するために構成されてもよい。
【0056】
プロセッサユニット411は、キーボード416及びマウス417等の1つ以上の入力装置と通信するように構成されてもよい。例えばキーボード416は、タッチスクリーンであるディスプレイ418に提供される仮想キーボードであってもよい。プロセッサユニット411は、例えばフロッピディスク420又はCDROM421を読み取るために、ディスプレイ418、スピーカ429及び1つ以上の読み取り装置419等の1つ以上の出力装置と通信するように更に構成されてもよい。ディスプレイ418は、従来のコンピュータディスプレイ(例えば、LCD)であってもよく、あるいは他の任意の適切なディスプレイであってもよい。ディスプレイ418は、ユーザが指でディスプレイ418に触れることにより命令及び/又は情報を入力することを可能にするタッチスクリーンとして機能するように構成されたディスプレイであってもよい。
【0057】
しかし、当業者に周知の更なる及び/又は他の記憶装置、入力装置及び読み取り装置が提供されてもよいことが理解されるべきである。更に、それら装置のうち1つ以上の装置は、必要に応じてプロセッサユニット411から物理的に遠く離れて配置されてもよい。プロセッサユニット411は1つのボックスで示されるが、当業者には周知であるように、互いに遠く離れて配置され且つ1つの主プロセッサにより制御されるか又は同時に機能するいくつかの処理ユニットを含んでもよい。
【0058】
サーバ40は、コンピュータシステムとして示されるが、本明細書で説明される機能を実行するように構成されるアナログ及び/又はデジタル及び/又はソフトウェア技術を使用する任意の信号処理システムであってもよい。サーバ40は、複数の構成要素から構成されるものとして図4に示すが、単一のデバイスとして形成されてもよいことが理解されるだろう。
【0059】
プロセッサユニット411は、入出力装置425を使用して他の演算装置又は通信装置と通信するように更に構成されてもよい。図4によると、入出力装置425は、サーバ40と衛星30との間の通信及びサーバ40とナビゲーションデバイス10との間の通信を可能にする。
【0060】
プロセッサユニット411は、記憶装置412、413、414、415に格納されるプログラム命令を実行するように構成されてもよい。
【0061】
記憶装置412、413、414、415は、ナビゲーションデバイス10の記憶装置12、13、14、15により格納された地図データと同様の地図データを更に含んでもよい。また、道路区間に関連付けられる基準速度値は、記憶装置412、413、414、415に格納される。基準速度値は、その道路区間の制限速度であってもよく、あるいは通常の状況下において達成可能な最高速度であってもよい。それら基準速度値は、ある特定のルートを移動するのに必要となる可能性のある時間を判定するため、ルートを計画する時に重要な情報となることが理解されるだろう。この情報は、最速ルート等の最適なルートを計算するのに必要とされる。
【0062】
第1の実施形態
第1の実施形態によると、サーバ40は、入出力装置425を使用して衛星30からデータを受信するように構成される。データは、地球の地表の少なくとも1枚の写真を含む。データは、写真の識別を含むヘッダを更に含む。また、ヘッダは、例えば経度、緯度、縮尺である地図座標等の基準系で表される写真の場所及び向きに関する情報を含んでもよい。
【0063】
プロセッサユニット411は、周知のパターン認識アルゴリズムを使用して、衛星30から受信した少なくとも1枚の写真において道路を認識及び識別する。識別は、認識された道路又は道路区間が高速道路A1又はE425として識別されることを意味する。認識ステップは、パターン認識アルゴリズムに対する入力として記憶装置412、413、414、415に格納された地図データを使用することにより簡単化されてもよい。ヘッダ情報は、少なくとも1枚の地上写真を地図データとマッチングするために使用されてもよい。対象道路の場所が既に分かっている場合にその道路を更に容易に見つけられるため、そのマッチングに基づいて、道路はパターン認識アルゴリズムにより更に容易に認識及び識別される。
【0064】
少なくとも1枚の写真において道路が認識された後、プロセッサユニット411は、道路のある特定の区間の複数の車両50を認識するように構成される。また、当業者に周知のパターン認識アルゴリズムがこれに対して使用されてもよい。
【0065】
これにより、道路のその区間に対する平均車両密度(例えば、100メートル毎の車両数)又は平均車間距離(例えば、50メートル)は、単一の写真に基づいて計算される。車両50の速度は、道路の交通量に依存することが周知である。すなわち、車両50の必要車間距離は、速度が速くなるのに伴い長くなる。従って、車両50の平均速度は、平均車両密度又は平均車間距離から計算又は推定される。当然、車両50の平均速度を判定する時に最高速度が考慮されてもよい。
【0066】
これは、特定の車両密度に対応する平均速度を含む所定のテーブルに対する入力として、平均車両密度又は平均車間距離を使用することにより行なわれ得る。テーブルは、記憶装置412、413、414、415に格納されてもよい。しかし、平均速度は、平均車両密度又は平均車間距離を入力として有する所定のアルゴリズムを使用して計算されてもよい。
【0067】
その道路区間に対する平均速度は、記憶装置412、413、414、415に格納された基準速度値と比較される。差分が検出されるか又は差分がある特定の閾値を超える場合、信号は交通状況に関する情報を含んでナビゲーションデバイス10に送信され得る。信号は、道路区間に関連付けられる新しく更新された基準速度を更に含んでもよい。この情報は、ナビゲーションデバイス10により格納され、「最適なルート」を計算する時又は既に計画されたルートを別のルートにする時に使用されてもよい。ルートを計画する時、先に格納された基準速度値を使用するのではなく、更新された基準速度値が使用される。
【0068】
道路区間に対する平均速度は、特に道路区間に関連付けられていない一般的な最低速度と単純に比較されてもよい。例えば、平均速度が最低速度を下回る場合に信号が送信されるようにする。この場合、基準速度は道路又は道路区間毎に格納される必要はなく、1つの一般的な最低速度のみが格納される。
【0069】
図5は、サーバ40のプロセッサユニット411により実行されるプログラムを示すフローチャートである。第1のステップ101において、サーバ40の入出力装置425は、衛星30から少なくとも1枚の地上写真を受信する。地上写真は、ヘッダ情報を更に含んでもよい。
【0070】
第2のステップ102において、プロセッサユニット411は、後続するパターン認識ステップを簡単化するために、地上写真を記憶装置412、413、414、415に格納された地図データとマッチングする。
【0071】
第3のステップ103において、プロセッサユニット411は、第1のパターン認識ステップを実行して、衛星30から受信した地上写真において道路及び他の関連項目を認識及び識別する。
【0072】
更なるステップ104において、プロセッサユニット411は、先に認識された道路上の車両を認識するために更なるパターン認識アルゴリズムを適用する。
【0073】
更なるステップ105において、プロセッサユニット411は、ある特定の道路又は道路区間の車両の平均速度を推定する。これは、例えば、平均車両密度又は平均車間距離を計算することにより行なわれ得る。平均車両速度は、記憶装置412、413、414、415のうち1つ以上に格納される所定のアルゴリズムを使用して平均車両密度又は平均車間距離から推定されてもよいし、あるいは推定の平均車両速度をルックアップするために、計算された平均車両密度又は平均車間距離を格納されているテーブルに対する入力として使用することにより推定されてもよい。
【0074】
第6のステップ106において、推定された平均速度は、記憶装置412、413、414、415に格納された道路区間に関連付けられる基準速度と比較される。差分があると決定されるか又は差分がある所定の閾値を超える場合、プロセッサユニット411は信号を編集し、入出力装置425を制御してステップ107に示すように信号を送信する。一方、差分があると決定されないか又は差分が所定の閾値を超えない場合、ステップ108に示すように信号は送信されない。
【0075】
信号は、ナビゲーションデバイス10に送信され得る。信号は、同報通信モードで送信されてもよいが、以下に更に説明するように、例えばナビゲーションデバイス10の要求時に2点間モードでナビゲーションデバイス10に送信されてもよい。信号は、変化した道路状態をナビゲーションデバイス10に通知し、更新された基準速度及びそれら更新された基準速度が適用される道路区間又は道路を含んでもよい。
【0076】
平均車両密度又は平均車間距離を判定する他の手段は、撮影され且つ識別された道路の「色」、すなわちコントラストを判定することである。交通量が多い場合、道路は車両50で満たされ、道路の「色」は車両のない道路の色とは異なる。車両のない道路は、ある特定の単色(暗色)で塗りつぶされる。車両50の存在により、その塗りつぶされた単調な色は変化する。交通状態は、映像において特定の車両50を認識することにより判定されるのではなく、単色(暗色)で塗りつぶされた道路又は道路区間に属する写真の画素数ndarkとその道路又は道路区間に属する他の色の画素数notherとの比Rを比較することにより判定される。
【0077】
【数1】
【0078】
ある所定の閾値を下回る等、比Rが小さい場合、写真は多くの道路領域を見せている。よって、交通量が通常であると考えられ、信号を生成する必要はない。ある特定の閾値を超える等、比Rが大きい場合、交通量は多いと考えられ、信号が生成される。
【0079】
この別の手段を実行するために、サーバ40は、道路に属する画素と車両50に属する画素とを区別できる必要がある。これは、暗さに対する閾値を判定し且つ画素の暗さと閾値とを比較することにより単純に行なわれてもよい。まず全ての暗色の画素を見つけ、動的に閾値を計算することもできる。
【0080】
本実施形態は、夜間に使用されてもよいことが理解されるだろう。車両50を直接認識するのではなく、ヘッドライトが発する光を検出することにより、車両50の存在及び場所が容易に判定される。
【0081】
車両の平均速度は、例えば車両の動きによる写真中の車両のぼけの量を使用する等の異なる手段で計算されてもよい。そのために、地上撮影装置31により使用される露出時間は、0.5秒等の相対的に長い時間が選択されてもよい。例えば50km/hの速度で、車両は0.5秒で約7メートル移動する。
【0082】
ぼけの量に基づいて、個々の車両50の速度は、ぼけの長さを測定することにより判定される。写真の縮尺を考慮して、車両が移動した距離が計算される。これに基づき、車両の速度は容易に計算される。これは、写真の全ての車両に対して行なわれる。写真の車両50の平均速度は、個別に判定された速度値を平均することにより計算される。これについては、第2の実施形態において更に詳細に説明する。
【0083】
第2の実施形態
第2の実施形態によると、衛星30は、同一の地上領域の少なくとも2枚の連続した地上写真を撮るように構成される。少なくとも2枚の地上写真は、10秒等の所定の時間間隔で撮られる。
【0084】
写真は、送信装置32を使用してサーバ40に送信される。サーバ40は、入出力装置425を使用して少なくとも2枚の写真を受信するように構成される。
【0085】
少なくとも2枚の写真は、写真の識別を有するヘッダを更に含んでもよい。ヘッダは、写真の経度、緯度、縮尺、時点で表される写真の場所及び向きに関する情報を含んでもよい。
【0086】
プロセッサユニット411は、周知のパターン認識アルゴリズムを使用して、衛星30から受信した少なくとも2枚の写真において道路を識別する。この認識ステップは、パターン認識アルゴリズムに対する入力として記憶装置412、413、414、415に格納された地図データを使用することにより簡単化されてもよい。ヘッダ情報は、少なくとも2枚の地上写真を地図データとマッチングするために使用されてもよい。道路を見つけるべき場所が既に分かっている場合にはその道路を更に容易に見つけられるため、そのマッチングに基づいて、道路はパターン認識アルゴリズムにより更に容易に認識及び識別される。
【0087】
少なくとも2枚の写真において道路が認識された後、プロセッサユニット411は、道路のある特定の区間の車両50を認識するように構成される。また、当業者に周知のパターン認識アルゴリズムがこれに対して使用されてもよい。
【0088】
異なる連続する写真を比較することにより、個々の車両の速度は計算される。第1の写真において認識された車両50の位置を第2の写真において認識された同一車両50の位置と比較する技術が使用される。特に上方から撮影される場合、殆どの車両が同様に見えるため、周知の計算アルゴリズムは、第1の写真の車両を第2の写真の同一車両に結び付けるように構成される。これは、流体力学において使用される粒子画像流速測定法により周知であるように、第1の写真と第2の写真との間の相関値を計算することにより行なわれてもよい。
【0089】
計算を簡単化する境界条件を課す計算アルゴリズムに対する入力として追加の情報が提供されてもよい。境界条件は、道路区間の車両が動く方向が全て同一方向であるということであってもよい。更なる条件は、互いに近接する車両の速度の差分が所定の閾値を超えないということであってもよい。
【0090】
計算アルゴリズムを更に簡単化するために、特定の特徴を有する車両のみが考慮されるようにしてもよい。これにより、第2の写真において同一車両を容易に認識できる。例えば、トラック及び/又は赤い自動車が容易に認識できるため、アルゴリズムはそれらのみを考慮するように構成されてもよい。
【0091】
少なくとも1台の車両の位置が第1の写真において判定され、同一車両の位置が第2の写真において判定される場合、車両の速度は計算される。第1の写真及び第2の写真の時点が例えばヘッダ情報から分かるため、第1の写真と第2の写真との間の時間間隔Δtが計算される。少なくとも1台の車両が移動する距離は、第1の写真及び第2の写真におけるその車両の位置を比較することにより判定される。第1の写真及び第2の写真の縮尺はヘッダ情報から分かるため、実際の距離Δxは写真内で測定された距離から容易に計算される。最後に、少なくとも1台の車両50の速度vが計算される。
v= Δx/Δt
2台以上の車両50の対応する位置が第1の写真及び第2の写真において判定される場合、速度viは車両毎に計算され得る。
vi = Δxi/Δt
式中、i = 1, 2, ..., imaxは車両50を表す。これにより、判定された全ての個々の車両速度viを平均することにより、平均車両速度vaverageが道路区間に対して計算され得る。
【0092】
【数2】
【0093】
その道路区間に対する平均速度vaverageは、記憶装置412、413、414、415に格納されたある特定の道路又は道路区間に関連付けられる基準速度値と比較される。差分が検出されるか又は差分がある特定の閾値を超える場合、信号は変化した道路状況に関する情報を含んでナビゲーションデバイス10に送信されてもよい。決定された平均速度vaverageは、ある特定の道路又は道路区間に関連付けられていない一般的な最低基準速度と比較されてもよい。そのような一般的な基準速度は、例えば10km/hの値を有してもよい。平均速度が10km/hを下回る場合、交通渋滞していると仮定する。
【0094】
信号は、その道路又は道路区間に関連付けられる新しく更新された基準速度を含んでもよい。この情報は、ナビゲーションデバイス10により格納され、「最適なルート」を計算する時又は既に計画されたルートを別のルートにする時に使用されてもよい。
【0095】
図6は、第2の実施形態に従って、サーバ40のプロセッサユニット411により実行されるプログラムを示すフローチャートである。第1のステップ111において、サーバ40の入出力装置425は、少なくとも2枚の地上写真を衛星30から受信する。少なくとも2枚の地上写真はヘッダ情報を更に含む。
【0096】
第2のステップ112において、プロセッサユニット411は、後続するパターン認識ステップを簡単化するために、少なくとも2枚の地上写真を記憶装置412、413、414、415に格納された地図データとマッチングする。
【0097】
第3のステップ113において、プロセッサユニット411は、第1のパターン認識ステップを実行して、衛星30から受信した少なくとも2枚の地上写真において道路及び他の関連項目を認識する。
【0098】
更なるステップ114において、プロセッサユニット411は、先に認識された道路上の車両50を認識するために更なるパターン認識アルゴリズムを適用する。
【0099】
更なるステップ115において、プロセッサユニット411は、第1の写真における車両50の位置と第2の写真における同一車両50の位置とを比較し、比較した位置に基づいて車両50の個々の速度を計算するために計算アルゴリズムを適用する。
【0100】
次のステップ116において、車両の平均速度は、先のステップ115において計算された車両50の個々の速度から計算される。
【0101】
第7のステップ117において、平均速度は、記憶装置412、413、414、415に格納された道路区間に関連付けられた速度(基準速度)と比較される。差分が判定されるか又は差分がある所定の閾値を超える場合、プロセッサユニット411は、信号を編集し、入出力装置425を制御してステップ118に示すように信号を送信する。信号は、例えばある特定の道路区間又は道路に対する更新された基準速度値を含む。差分が判定されないか又は差分が所定の閾値を超えない場合、ステップ119に示すように信号は送信されない。
【0102】
車両の速度を判定するのに3枚以上の写真が使用されてもよいことは理解されるだろう。例えば、3枚の連続する写真が使用される場合、個別の車両の速度は、第1の写真及び第2の写真に基づいて計算されてもよく且つ第2の写真及び第3の写真に基づいて計算されてもよい。双方の計算の結果を平均することにより、より正確な速度viを取得してもよい。
【0103】
第1の写真の車両が第2の写真の車両に結び付けられる時、車両が同一車両でない場合、当然エラーが発生する。これは、3枚以上の写真を使用することにより防止される。第1に、第1の写真及び第2の写真に基づいて車両50の速度が計算される。その計算された速度に基づいて、第3の写真の車両の位置が予測される。(類似する)車両50が第3の写真において予測した位置又は予測した位置の近傍に見つけられない場合、第1の写真と第2の写真とのマッチングは正確ではなかった。当然、(類似する)車両50が第3の写真において予測した位置に見つけられなかったことは、車両の速度の突然の変化に起因する可能性がある。
【0104】
サーバ40により生成された信号は、例えば図3に示すように車両50に搭載されたナビゲーションデバイス10に送信されてもよい。これについては以下に更に説明する。
【0105】
本実施形態は、夜間に使用されてもよいことが理解されるだろう。車両50を直接認識するのではなく、ヘッドライトが発する光を検出することにより、車両の存在及び場所が判定されてもよい。
【0106】
第3の実施形態
更なる実施形態によると、ナビゲーションデバイス10は、上述のサーバ40の機能を実行するように構成されてもよい。これは、ナビゲーションデバイス10が少なくとも1枚の写真を受信し、写真を地図データとマッチングし、写真の道路及び道路区間を認識し、車両を認識し、ある特定の道路又は道路区間に対する平均速度を推定し、その道路又は道路区間に関連付けられる格納された基準速度と推定された基準速度とを比較することができることを意味する。これは、1枚の写真又はより多くの写真に基づいて上述の全ての種類の技術を使用して行なわれてもよい。
【0107】
従って、ナビゲーションデバイス10は、図7に概略的に示されるようにサーバ40を省略し、入出力装置25を使用して衛星30と直接通信するように構成されてもよい。衛星30は、1枚以上の写真をナビゲーションデバイス10に送出する。ナビゲーションデバイス10は、サーバ40に関して上述したステップを実行するように構成される。このように、ナビゲーションデバイス10は、それ自体の交通情報を計算できる。
【0108】
別の手段によると、ナビゲーションデバイス10及び衛星30は、少なくとも1つの中間サーバ(不図示)を介して通信するように構成されてもよい。しかし、本実施形態によると、この中間局は、衛星30からナビゲーションデバイス10に写真を送信し且つ上述のサーバ40の機能性を実行しないように構成される。
【0109】
本実施形態によると、ナビゲーションデバイス10は、衛星30(又は中間サーバ)にある特定の場所の最新の写真を送信するように要求してもよい。その場所は、例えば現在の位置に基づくか又は計画されたルートに基づいてナビゲーションデバイス10により判定さる。
【0110】
第4の実施形態
上述の全ての実施形態は、一般にある特定の道路又は道路区間に対する交通量又は平均速度の更新された基準速度に関する情報以上の交通情報を検索及び配信するために使用されてもよいことが理解されるだろう。上述の全ての技術は、天候条件、駐車場の空き状況等の全ての種類の交通状態に関する情報を取得するために使用されてもよい。
【0111】
例えば、サーバ40は、地上写真に基づいて駐車場に空きがあるかを判定してもよい。これは、例えば、上述のように、まず写真と格納された地図データとをマッチングすることにより行なうことができる。地図データは、駐車場の位置に関する情報を含む駐車場に関する詳細な情報を含み得る。次に、サーバ40は、例えばパターン認識技術を使用して、車両50が駐車場に存在するか否かを認識する。駐車場の空き状況に関する情報は、入出力装置425及び入出力装置25を使用してサーバ40によりナビゲーションデバイス10に送信される。
【0112】
情報は、ユーザに提示される。あるいは、車両50を使用可能な駐車場に案内するか又は駐車場に空きがない場合には別の駐車場に案内するために、ナビゲーションデバイス10が情報を使用してもよい。
【0113】
当然、本実施形態は、サーバ40を使用せずに、本実施形態のステップを実行する機能をナビゲーションデバイス10に備えることにより実行されてもよい。
【0114】
上述の全ての実施形態は、衛星30から受信した写真にデータ処理ステップを適用することにより改善されてもよい。それら処理ステップは、輝度、コントラストを調整することを含んでもよい。また、全ての種類の適切なフィルタが使用されてもよい。雨及び/又は曇りの状態における画質を向上させる技術が使用されてもよい。
【0115】
更に、上述の全ての実施形態は、暗く且つ視界の悪い夜間に使用されてもよい。この場合、車両50は直接認識されない。しかし、例えば、車両50の(ヘッド)ライトが発する光を検出することにより、車両50は容易に認識得る。
【0116】
車両50の(ヘッド)ライトの発光による車両50の認識は、上述の全ての実施形態において使用され、交通の密度の判定、映像において車両のぼけの量を測定することによる平均速度の判定、暗い画素と明るい画素との間の比の判定、2枚以上の写真の比較等を行なう。
【0117】
カメラ31は、人間の目に不可視の電磁放射を感知可能であるカメラ等の任意の種類のカメラであってもよい。カメラ31は、夜間の使用を可能にする赤外線カメラであってもよい。
【0118】
上述の全ての実施形態において、サーバ40は、関連する交通状態が判定される場合にナビゲーションデバイス10に信号を送出するように構成される。この信号は、例えば道路区間の指示及び道路区間に関連付けられる新しい基準速度を含む変化した道路状態に関する情報を含んでもよい。ナビゲーションデバイス10に送信されるこの情報は、新しいルートを計画するか又は既に計画されたルートを再計画する時にナビゲーションデバイス10により使用されてもよい。
【0119】
サーバ40は、入出力装置425を使用してナビゲーションデバイス10にその信号を直接送出してもよい。しかし、サーバ40は、1つ以上の他の衛星(可能性として衛星30を含む)又は地上局を介してナビゲーションデバイス10に信号を送出してもよい。全ての種類の送信技術及び/又はプロトコルは、サーバ40からナビゲーションデバイス10に信号を送信するために使用されてもよいことが理解されるだろう。
【0120】
ナビゲーションデバイス10は、送信された信号を受信するために入出力装置25を具備する。ナビゲーションデバイス10のプロセッサユニット11は、信号を記憶装置12、13、14、15に格納し、ルートを計画するか又は既に計画されたルートを別のルートにする時に情報を使用するように構成される。
【0121】
更に別の手段によると、サーバ40は、道路状態の変化した付近のみにおけるナビゲーションデバイス10に信号を送信するように構成されてもよい。これは、道路状態の変化した付近のみにおいて信号を送信することによって行なわれてもよい。
【0122】
本発明の特定の実施形態を説明したが、本発明は上述以外の方法で実現されてもよいことが理解されるだろう。例えば、本発明は、先に開示された方法を記述する機械可読命令の1つ以上のシーケンスを含むコンピュータプログラムの形態をとってもよく、あるいはそのようなコンピュータプログラムを格納したデータ記憶媒体(例えば、半導体メモリ、磁気ディスク又は光ディスク)の形態をとってもよい。全てのソフトウェアコンポーネントがハードウェアコンポーネントとして形成されてもよいことは、当業者には理解されるだろう。
【0123】
上記説明は、例示することを意図しており、限定することを意図しない。従って、以下の請求の範囲から逸脱せずに、説明された本発明に対して変形が行なわれてもよいことが当業者には明らかとなるだろう。
【図面の簡単な説明】
【0124】
【図1】ナビゲーションデバイスを概略的に示す概略ブロック図である。
【図2】ナビゲーションデバイスを概略的に示す図である。
【図3】本発明の一実施形態に関わるシステムを概略的に示す図である。
【図4】本発明の一実施形態に関わるサーバを概略的に示す図である。
【図5】本発明の一実施形態を概略的に示すフローチャートである。
【図6】本発明の別の実施形態を概略的に示すフローチャートである。
【図7】本発明の更なる実施形態に関わるシステムを概略的に示す図である。
【特許請求の範囲】
【請求項1】
交通情報を判定する方法であって:
− 入出力装置(25;425)を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し、
− プロセッサユニット(11;411)を使用して、前記少なくとも1枚の受信した写真において前記少なくとも1つの道路区間の複数の車両(50)を認識し、
−前記少なくとも1台の認識された車両(50)に基づいて交通情報を判定することを特徴とする方法。
【請求項2】
前記複数の車両(50)は、パターン認識技術を使用して認識される請求項1に記載の方法。
【請求項3】
前記パターン認識技術に対する入力として地図データが使用される請求項2に記載の方法。
【請求項4】
− 前記少なくとも1枚の受信した写真に基づいて前記複数の認識された車両(50)の速度を計算することを更に含む、請求項1乃至3のいずれか1項に記載の交通情報を判定する方法。
【請求項5】
前記複数の車両(50)の前記速度は、
− 道路区間に対する車両密度を判定し、
− 前記道路区間の前記複数の認識された車両(50)の平均速度を前記車両密度から推定することにより計算される請求項4に記載の方法。
【請求項6】
道路区間に対する前記車両密度は、道路又は道路区間に属する前記写真の第1の色の画素数(ndark)と他の色の画素数(nother)との比を判定することにより判定される請求項5に記載の方法。
【請求項7】
前記複数の認識された車両(50)の前記速度は、
−前記複数の認識された車両のぼけの量を判定することにより計算される請求項4に記載の方法。
【請求項8】
− 第1の写真が第1の時点で作成され且つ第2の写真が第2の時点で作成される地球の一部を示す少なくとも2枚の写真を撮影装置(31)から受信し、
− 前記第1の写真において複数の車両(50)を認識し、
− 前記第2の写真において複数の車両(50)を認識し、
− 前記第1の写真及び前記第2の写真の双方において認識された前記複数の車両(50)の少なくとも一部について前記第1の写真と前記第2の写真との間で移動した距離を計算し、
− 前記計算された距離、並びに前記第1の時点及び前記第2の時点を使用して前記複数の認識された車両(50)の速度を計算することを含む請求項4に記載の方法。
【請求項9】
− 前記複数の認識された車両(50)の前記計算された速度と前記複数の認識された車両が認識された前記道路区間に関連付けられる基準速度とを比較することを更に含む請求項4乃至8のいずれか1項に記載の方法。
【請求項10】
− 前記複数の認識された車両(50)の前記計算された速度と所定の最低速度とを比較することを更に含む請求項4乃至9のいずれか1項に記載の方法。
【請求項11】
− 前記認識された車両(50)の位置を判定し、
− 前記判定された位置と駐車場に関する情報を含む地図データとを比較し、
− 前記駐車場の空き状況を判定することを更に含む請求項1乃至3のいずれか1項に記載の方法。
【請求項12】
− 前記判定された交通情報を含む信号を編集し、
− 前記編集された信号を送信することを更に含む請求項1乃至11のいずれか1項に記載の方法。
【請求項13】
入出力装置(25、425)、記憶装置及び処理ユニット(11、411)を具備し、前記処理ユニット(11、411)が前記入出力装置(25、425)を使用して他のデバイスと通信するように構成され且つ前記記憶装置と通信するように構成されたデバイス(10、40)であって、
− 前記入出力装置(25、425)を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し、
− 前記処理ユニット(11、411)を使用して、前記少なくとも1枚の受信した写真において前記少なくとも1つの道路区間の複数の車両(50)を認識し、
−前記複数の認識された車両(50)に基づいて交通情報を判定するように構成されていることを特徴とするデバイス。
【請求項14】
前記デバイスは、前記判定された交通情報に基づいて信号を編集し且つ前記入出力装置(25、425)を使用して前記信号を送信するように構成されたサーバである請求項13に記載のデバイス。
【請求項15】
前記デバイスは、ルートを計画するように構成されたナビゲーションデバイス(10)である請求項14に記載のデバイス。
【請求項16】
前記ナビゲーションデバイス(10)は、前記判定された交通情報に基づいてルートを計画するように構成される請求項15記載のデバイス。
【請求項17】
請求項13から15のいずれか1項に記載のデバイスを具備する車両。
【請求項18】
コンピュータにロードされた時に請求項1記載の方法を実行するように構成されたコンピュータプログラム。
【請求項19】
請求項18記載のコンピュータプログラムを含むデータ記憶媒体。
【請求項1】
交通情報を判定する方法であって:
− 入出力装置(25;425)を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し、
− プロセッサユニット(11;411)を使用して、前記少なくとも1枚の受信した写真において前記少なくとも1つの道路区間の複数の車両(50)を認識し、
−前記少なくとも1台の認識された車両(50)に基づいて交通情報を判定することを特徴とする方法。
【請求項2】
前記複数の車両(50)は、パターン認識技術を使用して認識される請求項1に記載の方法。
【請求項3】
前記パターン認識技術に対する入力として地図データが使用される請求項2に記載の方法。
【請求項4】
− 前記少なくとも1枚の受信した写真に基づいて前記複数の認識された車両(50)の速度を計算することを更に含む、請求項1乃至3のいずれか1項に記載の交通情報を判定する方法。
【請求項5】
前記複数の車両(50)の前記速度は、
− 道路区間に対する車両密度を判定し、
− 前記道路区間の前記複数の認識された車両(50)の平均速度を前記車両密度から推定することにより計算される請求項4に記載の方法。
【請求項6】
道路区間に対する前記車両密度は、道路又は道路区間に属する前記写真の第1の色の画素数(ndark)と他の色の画素数(nother)との比を判定することにより判定される請求項5に記載の方法。
【請求項7】
前記複数の認識された車両(50)の前記速度は、
−前記複数の認識された車両のぼけの量を判定することにより計算される請求項4に記載の方法。
【請求項8】
− 第1の写真が第1の時点で作成され且つ第2の写真が第2の時点で作成される地球の一部を示す少なくとも2枚の写真を撮影装置(31)から受信し、
− 前記第1の写真において複数の車両(50)を認識し、
− 前記第2の写真において複数の車両(50)を認識し、
− 前記第1の写真及び前記第2の写真の双方において認識された前記複数の車両(50)の少なくとも一部について前記第1の写真と前記第2の写真との間で移動した距離を計算し、
− 前記計算された距離、並びに前記第1の時点及び前記第2の時点を使用して前記複数の認識された車両(50)の速度を計算することを含む請求項4に記載の方法。
【請求項9】
− 前記複数の認識された車両(50)の前記計算された速度と前記複数の認識された車両が認識された前記道路区間に関連付けられる基準速度とを比較することを更に含む請求項4乃至8のいずれか1項に記載の方法。
【請求項10】
− 前記複数の認識された車両(50)の前記計算された速度と所定の最低速度とを比較することを更に含む請求項4乃至9のいずれか1項に記載の方法。
【請求項11】
− 前記認識された車両(50)の位置を判定し、
− 前記判定された位置と駐車場に関する情報を含む地図データとを比較し、
− 前記駐車場の空き状況を判定することを更に含む請求項1乃至3のいずれか1項に記載の方法。
【請求項12】
− 前記判定された交通情報を含む信号を編集し、
− 前記編集された信号を送信することを更に含む請求項1乃至11のいずれか1項に記載の方法。
【請求項13】
入出力装置(25、425)、記憶装置及び処理ユニット(11、411)を具備し、前記処理ユニット(11、411)が前記入出力装置(25、425)を使用して他のデバイスと通信するように構成され且つ前記記憶装置と通信するように構成されたデバイス(10、40)であって、
− 前記入出力装置(25、425)を使用して、少なくとも1つの道路区間を含む地表の一部分の少なくとも1枚の写真を受信し、
− 前記処理ユニット(11、411)を使用して、前記少なくとも1枚の受信した写真において前記少なくとも1つの道路区間の複数の車両(50)を認識し、
−前記複数の認識された車両(50)に基づいて交通情報を判定するように構成されていることを特徴とするデバイス。
【請求項14】
前記デバイスは、前記判定された交通情報に基づいて信号を編集し且つ前記入出力装置(25、425)を使用して前記信号を送信するように構成されたサーバである請求項13に記載のデバイス。
【請求項15】
前記デバイスは、ルートを計画するように構成されたナビゲーションデバイス(10)である請求項14に記載のデバイス。
【請求項16】
前記ナビゲーションデバイス(10)は、前記判定された交通情報に基づいてルートを計画するように構成される請求項15記載のデバイス。
【請求項17】
請求項13から15のいずれか1項に記載のデバイスを具備する車両。
【請求項18】
コンピュータにロードされた時に請求項1記載の方法を実行するように構成されたコンピュータプログラム。
【請求項19】
請求項18記載のコンピュータプログラムを含むデータ記憶媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2009−500765(P2009−500765A)
【公表日】平成21年1月8日(2009.1.8)
【国際特許分類】
【出願番号】特願2008−521338(P2008−521338)
【出願日】平成17年7月11日(2005.7.11)
【国際出願番号】PCT/NL2005/000496
【国際公開番号】WO2007/008055
【国際公開日】平成19年1月18日(2007.1.18)
【出願人】(307043223)トムトム インターナショナル ベスローテン フエンノートシャップ (144)
【Fターム(参考)】
【公表日】平成21年1月8日(2009.1.8)
【国際特許分類】
【出願日】平成17年7月11日(2005.7.11)
【国際出願番号】PCT/NL2005/000496
【国際公開番号】WO2007/008055
【国際公開日】平成19年1月18日(2007.1.18)
【出願人】(307043223)トムトム インターナショナル ベスローテン フエンノートシャップ (144)
【Fターム(参考)】
[ Back to top ]