
交通情報推定装置、交通情報推定のためのコンピュータプログラム、及び交通情報推定方法
【課題】推定対象道路リンクの交通情報を、推定用パラメータを用いて適切に推定できるようにする。
【解決手段】他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定装置である。他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定システム11と、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習システム12とを備えている。
【解決手段】他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定装置である。他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定システム11と、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習システム12とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交通情報を推定するための交通情報推定装置、交通情報推定のためのコンピュータプログラム、及び交通情報推定方法に関するものである。
【背景技術】
【0002】
道路の交通情報をドライバーに提供する技術として、財団法人道路交通情報通信システムセンターによるVICS(Vehicle Information and Communication System:なお、「VICS」は上記財団法人の登録商標)が広く知られている。
このVICSは、各種の路側センサ(車両感知器やループコイル等)から収集した車両台数や車両速度等よりなる定点観測情報に基づいて、各路線での渋滞やリンク旅行時間を含む交通情報を集計し、その交通情報を、ビーコンによる狭域通信やFM放送等の広域通信によってドライバーに提供するものである。
【0003】
また、道路の交通情報をドライバーに提供する他の技術として、プローブカーを利用した交通情報推定システム(以下、プローブシステムという。)も知られている。
このプローブシステムは、例えば特許文献1および2に示すように、実際に道路を走行する車両(プローブ車両)を移動体センサとして利用するもので、現時点の車両位置や時刻等のプローブ情報を無線通信によって各プローブ車両から収集し、道路の交通情報を生成するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−151496号公報
【特許文献2】特開2005−4467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記VICS情報は、路側センサが設置された主要幹線道路等の一部の道路に関してしか得られない。
一方、プローブシステムでは、実際に道路を走行する車両(プローブ車両)を移動体センサとして利用するため、路側センサが設置されていない道路に関しても、交通情報を取得することが可能となる。
【0006】
しかし、現状では、プローブカーの台数は、非常に少なく、VICS及びプローブシステムのいずれからもデータが得られていない道路リンクについては、交通情報を得ることができない。
【0007】
そこで、(VICS及び)プローブシステムからデータが得られていない道路リンクについては、別の道路リンクの交通情報に基づいて、交通情報を推定することが考えられる。例えば、ある道路リンクの交通情報は、当該道路リンクに接続している道路リンク等のような関連のある他の道路リンクにおける交通情報との相関が認められる。このような相関関係を利用すれば、他の道路リンクの交通情報を用いて、推定対象となる道路リンクの交通情報を補完することができる。
【0008】
しかし、上記のような推定を行おうとすると、他の各道路リンクの交通情報それぞれを、どの程度、推定対象となる道路リンクの交通情報として反映させるか等を決める推定用パラメータを適切に設定することが必要となる。
推定用パラメータを適切に設定するには、道路リンクの交通情報同士の相関を、実際に測定・調査して同定することが考えられるが、膨大な数の道路リンク同士の組み合わせについて、そのような相関を人為的な手段により適切に求めることは現実的には不可能である。
【0009】
そこで、本発明は、推定対象道路リンクの交通情報を、推定用パラメータを用いて適切に推定できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
(1)本発明は、他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定装置であって、他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定部と、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習部とを備えたことを特徴とする。
【0011】
上記本発明によれば、交通情報を取得できなかった道路リンクについては、交通情報の推定が行われる。実測値に基づく交通情報が取得できた道路リンクについては、当該実測値に基づく交通情報と、当該交通情報を推定するために用いられる他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて推定用パラメータを最適化するため、交通情報が取得されていくにしたがって推定用パラメータを適切な値に更新することが可能であり、推定用パラメータを人為的に設定しなくても、適切な推定用パラメータが得られる。
【0012】
前記交通情報推定装置において、実測値に基づく交通情報がある道路リンクについて取得されたとする。この道路リンクに対応する道路は複数の車線を有しており、例えば、右側の車線は、車両がその後もほぼ同じ速度で走行する本線である場合、取得できた実測値に基づく交通情報は比較的速い走行速度を示す情報となるが、左側の車線は、分岐した側道へと続く車線でありしかも車両が停滞している場合、取得できた実測値に基づく交通情報は比較的遅い走行速度を示す情報となる。
このように、ある道路リンクの交通情報が実測値に基づいて得られたとしても、二種類の交通情報が取得される可能性があり、このような交通情報を用いて、当該ある道路リンクに関連する推定対象道路リンクの交通情報を推定しても、また、推定用パラメータを最適化する処理を行っても、正確なものとならないおそれがある。
【0013】
(2)そこで、前記学習部は、前記推定対象道路リンクになり得る道路リンクよりも後で分岐して存在する複数の枝道路リンク別に分類された前記学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化し、前記推定部は、前記枝道路リンク別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定する構成とすればよい。
この交通情報推定装置によれば、前記のように、道路リンクがその先で分岐していて、同じ道路リンクから複数種類の交通情報が取得される可能性があっても、前記学習部が、枝道路リンク別に推定用パラメータを最適化し、前記推定部は、枝道路リンク別に最適化された前記推定用パラメータを用いるので、推定対象道路リンクの交通情報を正確に推定することができる。
【0014】
(3)そして、前記(2)の場合において、前記学習部は、前記学習用データを、前記複数の枝道路リンク別に分類して蓄積する構成とすればよい。
つまり、前記学習部は、前記学習用データを、前記推定対象道路リンクになり得る道路リンクよりも後で分岐して存在する複数の枝道路リンク別に分類して蓄積し、蓄積された前記枝道路リンク別の前記学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化する構成となる。ただし、交通情報(またはその付属情報)から推定用パラメータの算出時に前記学習用データを分類可能であるならば、条件別に分類して蓄積せずとも、一つにまとめて蓄積しておいてもよい。
【0015】
(4)前記学習部は、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類された前記学習用データを用いて、当該条件別に推定用パラメータを最適化し、前記推定部は、前記条件別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定するのが好ましい。
同じ道路リンク(同じ道路)であっても、暦、時間帯、及び、天候が異なることによって、異なる傾向の実測値に基づく交通情報が取得される場合があり、このような交通情報に基づいて推定対象道路リンクの交通情報を推定しても、また、推定用パラメータを最適化しても、正確なものとならないおそれがあるが、前記(4)の交通情報推定装置によれば、前記学習部が、暦、時間帯、及び、天候の内の少なくとも一つの条件別に推定用パラメータを最適化し、前記推定部は、前記条件別別に最適化された前記推定用パラメータを用いるので、推定対象道路リンクの交通情報を正確に推定することができる。
【0016】
(5)そして、前記(4)の場合において、前記学習部は、前記学習用データを、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類して蓄積する構成とすればよい。
つまり、前記学習部は、前記学習用データを、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類して蓄積し、蓄積された前記条件別の前記学習用データを用いて、当該条件別に推定用パラメータを最適化する構成となる。ただし、交通情報(またはその付属情報)から推定用パラメータの算出時に前記学習用データを分類可能であるならば、条件別に分類して蓄積せずとも、一つにまとめて蓄積しておいてもよい。
【0017】
前記(1)のとおり、学習部は、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる他の道路リンクの交通情報との組み合わせを学習用データとして蓄積することから、実測値に基づく交通情報が得られると、学習用データが新たに蓄積されるように構成することができる。
このように、学習用データが新たに学習データベースに追加されても、元の古くから蓄積されている学習用データも、学習データベースに残存している。したがって、学習データベースに蓄積されている学習用データすべてを使って、学習対象道路リンクの学習処理を行うと、元の古い学習用データの影響を受けて、学習精度向上が妨げられるおそれがある。
したがって、学習データベースに蓄積された時期が古い学習用データは、廃棄し、新たに蓄積された学習用データを用いて学習を行うのが有効である。この場合、蓄積された時期が最も古い学習用データから、単純に廃棄してもよいが、廃棄対象となる学習用データの選別行うのが好ましい場合がある。
【0018】
(6)そこで、前記学習部は、学習用データを所定のカテゴリー毎に分類して蓄積し、前記カテゴリーのうち、蓄積されている学習用データの数が多いカテゴリーの学習用データを優先して破棄し、破棄されずに残っている学習用データを用いて、前記推定用パラメータを最適化するのが好ましい。この構成により、学習処理の基礎となる学習用データの絞り込みを行うことが可能となる。
【0019】
また、前記各交通情報推定装置において、例えば、ある道路リンクの交通情報によればリンク旅行速度が100km/hであることが検出され、他の道路リンクの交通情報によればリンク旅行速度が60km/hであることが検出されたとする。この場合、速度に差が存在するが、これは道路の制限速度の違いによるものにすぎず、道路の混雑度(交通量)としては、いずれにおいてもほぼ同様(空いている)と考えられる。
【0020】
(7)そこで、前記交通情報推定装置は、更に、前記他の道路リンクにおける車両の速度を示すリンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる速度情報に、所定の変換情報に基づいて変換する変換部を有し、前記変換部は、道路リンクの種別又は当該道路リンクの交通情報に応じて前記変換情報を変更して、前記速度情報に変換する構成とすればよい。
この場合、リンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる速度情報に変換するので、速度情報によって道路状況をより適切に表現させることが可能となる。
さらに、道路リンクの種別又は道路リンクの交通情報に応じて、前記変換情報を変更して、速度情報に変換するので、道路リンクの種別又は道路リンクの交通情報に適した速度情報に変換することができる。なお、前記道路リンクの種別には、例えば、高速道路、一般道路があり、前記道路リンクの交通情報としては、例えば、空いている情報、混雑している情報がある。
【0021】
(8)また、前記学習部は、推定用パラメータの最適化のために蓄積させる前記学習用データの数を、前記推定部による推定処理において交通情報が用いられる他の道路リンクの数、又は、前記推定部による推定処理において用いられる推定用パラメータの数に応じて設定するのが好ましい。
前記学習部が、推定用パラメータを最適化する学習を効果的に行うためには、学習用データの数がある程度多いのが好ましい場合もあるが、推定部による推定処理において交通情報が用いられる他の道路リンクの数、又は、推定用パラメータの数が少ない場合は、これに応じて、学習用データの数も少なくてもよく、前記学習部によれば、学習用データの数を減らすことで、情報の記憶量を減らすことが可能となる。
【0022】
(9)また、前記推定部は、前記推定対象道路リンクの交通情報を推定する際に用いる算出方式を、当該推定対象道路リンクの種別又は当該推定部による交通情報の推定結果の精度に応じて、変更して交通情報を推定するのが好ましい。
この場合、推定対象道路リンクに対応する道路と、その周辺道路との相関関係が単純である場合、例えば、推定対象道路リンクが高速道路である場合、交通情報を推定する際に用いる算出方式として線形モデルを採用すればよく、これにより処理時間を短くすることができる。これに対して、推定対象道路リンクに対応する道路と、その周辺道路との相関関係が複雑である場合、例えば、推定対象道路リンクが、リンク途中で車両の流入や流出が多い一般道路である場合、交通情報を推定する際に用いる算出方式として非線形モデルを採用することができる。
【0023】
(10)また、前記学習部は、蓄積されている道路リンク毎の前記学習用データの数に応じて、又は、前記推定部による交通情報の推定結果の精度に応じて、前記最適化の処理を行う頻度を変更するのが好ましい。
学習部による推定用パラメータを最適化する処理には時間を要するため、蓄積されている学習用データの数が多くなれば、学習用データを蓄積する毎に最適化の処理を行うのではなく、頻度を減らすことができる。また、推定部による交通情報の推定結果の精度が好ましくない場合には、最適化の処理を行う頻度を増やし(例えば、学習用データを蓄積する毎に行う)、推定部による交通情報の推定結果の精度が好ましい場合には、最適化の処理を行う頻度を減らすことができる。
【0024】
(11)また、前記推定部は、他の道路リンクの交通情報及び推定用パラメータを用いて推定した推定対象道路リンクの交通情報の信頼度を求め、前記推定部は、前記信頼度に基づいて、前記推定処理とは別の推定処理に変更して、推定対象道路リンクの交通情報を推定するのが好ましい。
この場合、他の道路リンクの交通情報及び推定用パラメータを用いて推定した交通情報の信頼度が低い場合、別の推定処理に変更して交通情報を推定することが可能となる。なお、別の推定処理としては、例えば、統計情報を用いて行う処理がある。
【0025】
(12)また、前記推定部は、他の道路リンクの交通情報及び推定用パラメータを用いて推定対象道路リンクの交通情報を推定する第一推定処理機能と、過去に取得した道路リンクの交通情報を統計して得た統計情報を用いて、推定対象道路リンクの交通情報を推定する第二推定処理機能とを有し、前記推定部は、道路リンクにおける実測値に基づく交通情報が得られると、当該実測値に基づく交通情報と、前記第一推定処理機能及び前記第二推定処理機能それぞれによって推定された交通情報との誤差を求め、当該誤差の比較に基づいて、前記道路リンクにおいて、当該第一推定処理機能と当該第二推定処理機能との内のいずれを用いるか決定するのが好ましい。
この場合、道路リンクにおける実測値に基づく交通情報が得られると、第一推定処理機能と第二推定処理機能との内の、当該実測値に基づく交通情報に対して誤差が小さくなる方で、当該道路リンクにおいて、推定対象道路リンクの交通情報を推定させることが可能となる。
【0026】
(13)また本発明は、コンピュータを、上記(1)〜(12)のいずれか1項に記載の交通情報推定装置として機能させるためのコンピュータプログラムである。
【0027】
(14)また本発明は、他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定方法であって、他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定ステップと、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習ステップとを備えたことを特徴とする交通情報推定方法。
【発明の効果】
【0028】
本発明によれば、交通情報が取得されていくにしたがって推定用パラメータを適切な値に更新することが可能であり、推定用パラメータを人為的に設定しなくても、適切な推定用パラメータが得られるので、この推定用パラメータ及び他の道路リンクの交通情報を用いて、推定対象道路リンクの交通情報を適切に推定することが可能となる。
【図面の簡単な説明】
【0029】
【図1】交通情報システムの全体構成図である。
【図2】交通情報推定装置の構成図である。
【図3】入力情報処理部の構成図である。
【図4】変換情報を示す図である。
【図5】交通情報推定処理手順を示すフローチャートである。
【図6】ニューラルネットワークの構成図である。
【図7】道路リンクの例を示す図である。
【図8】推定データベースの初期状態を示す図である。
【図9】重みデータベースの初期状態を示す図である。
【図10】入力情報として取得したVICS情報及びプローブ情報を示す図である。
【図11】1回目の更新後の推定データベースを示す図である。
【図12】2回目の更新後の推定データベースを示す図である。
【図13】3回目の更新後の推定データベースを示す図である。
【図14】スナップショットとして抽出される部分を示す図である。
【図15】学習データベースを示す図である。
【図16】学習処理を示すフローチャートである。
【図17】二車線からなる道路の説明図である。
【図18】図11の一部を書き直した推定データベースの説明図である。
【図19】図9の一部を書き直した重みデータベースの説明図である。
【図20】学習データベース及び重みデータベースの説明図である。
【図21】推定システムによるモデルの変更を説明するフロー図である。
【図22】推定システムによるモデルの変更を説明するフロー図である。
【図23】推定システムによる選択処理を説明するフロー図である。
【図24】推定システムによる選択処理を説明するフロー図である。
【図25】図4とは別である変換情報を示す図である。
【図26】カテゴリー情報付き学習用データのデータ構造図である。
【図27】カテゴリー分けした場合の学習用データの学習データベースへの蓄積処理を示す図である。
【図28】学習サイクルを設定するための処理を説明するフロー図である。
【図29】学習サイクルを設定するための処理を説明するフロー図である。
【発明を実施するための形態】
【0030】
以下、本発明の好ましい実施形態について添付図面を参照しながら説明する。
[1.全体構成]
図1は、本発明の交通情報推定装置(中央装置)1を備えている交通情報システムの全体構成図である。この交通情報システムは、交通情報推定装置1のほか、車載装置2を搭載したプローブ車両3、車載装置2と無線通信する路側通信機4、及び路側センサ5等を含む。
【0031】
交通情報推定装置1は、例えば中央装置における様々な機能のうちの一機能を指しており、交通情報推定装置1は、VICS情報及びプローブ情報等の交通情報(観測情報)を取得し、車両に提供するための提供用の交通情報を生成する機能を有している。なお、交通情報推定装置1は、交通情報に基づいて、信号機制御や交通管制等の各種の交通用処理を行ってもよい。
【0032】
この交通情報推定装置(中央装置)1は、処理装置(CPU)及び記憶装置を有するコンピュータによって構成されており、記憶装置には、コンピュータを、交通情報推定装置1として機能させるためのコンピュータプログラムが記憶されている。このコンピュータプログラムは、前記処理装置によって実行され、前記処理装置が前記記憶装置等に対し入出力を行うことで、交通情報推定装置1としての機能を実現する。なお、以下に説明する交通情報推定装置(中央装置)1の機能は、特に断らない限り、前記コンピュータプログラムによって実現されるものである。
【0033】
前記車載装置2は、プローブ車両3の観測情報としてプローブ情報を生成し、路側通信機4に無線送信する。又は、車載装置2は、当該車載装置2と接続した携帯電話機50を介して、プローブ情報を送信してもよい。
プローブ情報は、プローブ車両の位置、当該位置の通過時刻及びプローブ車両の車両ID等を含む交通情報である。また、プローブ情報には、プローブ車両の通過速度等その他の情報を含めても良い。プローブ情報の位置及び時刻の情報に基づいて、道路リンク毎のリンク旅行時間が得られる。なお、プローブ車両の位置は、車載装置2が有するGPS受信機によって受信したGPS信号に基づいて算出される。
【0034】
前記路側通信機4は、車載装置2との間で無線通信によって情報の送受信を行うものである。具体的には、路側通信機4は、車載装置2が送信した観測情報としてのプローブ情報を受信し、交通情報推定装置(中央装置)1に転送する。また、路側通信機4は、交通情報推定装置(中央装置)1から、車両への提供用の交通情報を取得し、その交通情報を、車載装置2に送信することができる。なお、路側通信機4と交通情報推定装置1との間は、通信回線によって接続されている。
なお、前記のとおり、プローブ情報は携帯電話機50を介して送信してもよく、この場合、車載装置2によってプローブ情報が生成されると、当該プローブ情報は、携帯電話機50へ送られ、携帯電話機50が基地局49へプローブ情報を送信する。そして、基地局49は、プローブ情報を交通情報推定装置(中央装置)1に転送する。また、携帯電話機50は、交通情報推定装置(中央装置)1から基地局51を介して、車両への提供用の交通情報を取得し、その交通情報を、車載装置2に送ることができる。
【0035】
前記路側センサ5は、観測情報としての交通情報を検出するためのものであり、例えば、直下を通行する車両を超音波感知する車両感知器や、インダクタンス変化で車両を感知するループコイル、或いは、カメラの映像を画像処理して交通量や車両速度を計測する画像感知器よりなり、交差点等に流入する車両台数や車両速度を計測する目的で、高速道路や主要な幹線道路等に設置されている。
【0036】
路側センサ5によって検出された観測情報は、通信回線を介して、VICSセンタサーバ6に送信され、このVICSセンタサーバ6では、路側センサ5の観測情報に基づいて、VICS情報を生成する。このVICS情報は、通信回線を介して、交通情報推定装置1に送信される。
【0037】
前記VICS情報は、各道路リンクでの渋滞やリンク旅行時間を含む交通情報である。VICS情報は、路側センサ5から5分ごとに観測情報を取得して、更新されるため、時間的に高密度な情報が得られる。しかし、路側センサ5はすべての道路に設置されているわけではなく(主要道路でも20%以下)、エリアカバー率が低い。
一方、前記プローブ情報は、道路を走行するプローブ車両3から取得するため、エリアカバー率を高くすることが可能である。ただし、プローブ車両3となるための車載装置2の普及率がまだ低いため、時間的に低密度のデータしか得られない。
【0038】
つまり、所定エリア内の道路に、道路リンクを設定した場合、VICS情報が得られる道路リンクについては、VICS情報の更新単位時間ごとに常に交通情報(VICS情報)が得られる。一方、VICS情報が得られない道路リンクについては、VICS情報の更新単位時間毎にみると、プローブ情報が交通情報として得られる道路リンクがある一方、プローブ情報も得られない道路リンクが混在することになる。
【0039】
[2.交通情報推定装置の詳細]
[2.1 推定装置の全体構成]
本実施形態に係る交通情報推定装置1は、VICS情報もプローブ情報も得られない道路リンクの交通情報を推定して、当該道路リンクの交通情報を補完することで、所定エリア内の全道路リンクの交通情報を取得する。つまり、本実施形態に係る交通情報推定装置1は、所定エリア内の全道路リンクを母集団とし、全道路リンクのうちの一部の道路リンクについて交通情報を取得すると、残りの道路リンクについての交通情報を推定する。
【0040】
このように、VICS情報もプローブ情報も得られない道路リンクの交通情報を補完することで、より精度が高い交通情報を車両(ナビゲーションシステム)に提供したり、精度良く交通管制を行ったりすることが可能となる。
なお、以下では、VICS情報もプローブ情報も得られず交通情報を推定して補完する必要がある道路リンクを、「推定対象道路リンク」という。
【0041】
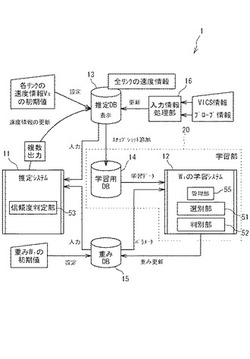
図2に示すように、交通情報推定装置1は、推定対象道路リンクの交通情報を推定するための推定システム(推定部)11と、推定に用いられるパラメータ(推定用パラメータ)を学習するための学習システム12とを備えている。
【0042】
また、交通情報推定装置1は、推定システム11によって推定した交通情報等を蓄積するための推定データベース(交通情報データベース)13、推定データベース13におけるデータのうち、学習システム12における学習に用いるデータを蓄積する学習データベース14、推定用パラメータ(本実施形態では「重み」)を蓄積するための重みデータベース(推定パラメータデータベース)15と、を記憶装置上に備えている。
【0043】
[2.2 入力情報処理部]
本実施形態に係る交通情報推定装置1は、当該交通情報推定装置1が取得したVICS情報及びプローブ情報(以下、両情報を総称する場合、「入力情報」という)に対する処理を行う入力情報処理部16を備えている。
入力情報処理部16は、入力情報から、各リンクの「速度情報」を生成する処理を行うものであり、生成した「速度情報」は、推定データベース13に与えられ、推定データベース13の更新に用いられる。
【0044】
図3に示すように、入力情報処理部16は、取得したVICS情報から「速度情報」を生成するVICS情報処理部17と、取得したプローブ情報から、「速度情報」を生成するプローブ情報処理部18と、を備えている。
VICS情報処理部17は、VICS情報に基づいて得られるリンク旅行時間から、当該道路リンクのリンク旅行速度を算出するリンク旅行速度算出部17aと、リンク旅行速度を当該リンクの「速度情報」に変換する速度情報変換部17bとを備えている。
【0045】
VICS情報処理部17のリンク旅行速度算出部17aは、リンク旅行速度を算出しようとする道路リンクのリンク長を、当該道路リンクのリンク旅行時間で除することで、リンク旅行速度[km/h]を算出する。なお、対象エリア内の全道路リンクのリンク長は、予め、装置1の記憶装置に格納されている。
VICS情報処理部17の速度情報変換部17bは、リンク旅行速度算出部17aで求めたリンク旅行速度を、「速度情報」(規格化速度)という指標値(速度指標情報)に変換する。この変換は、速度情報変換部17bが、装置1に予め設定された「速度−速度情報」変換情報19を参照することで行われる。「速度−速度情報」変換情報19は、図4に示すように設定されたものであるが、詳細については後述する。
【0046】
プローブ情報処理部18のリンク旅行速度算出部18aは、プローブ情報に含まれる位置及び時刻に基づいて、道路リンクのリンク旅行速度を算出する。
プローブ情報処理部18の速度情報変換部18bは、「速度−速度情報」変換情報19を参照することにより、リンク旅行速度算出部18aで求めたリンク旅行速度を、「速度情報」(規格化速度)という指標値(速度指標情報)に変換する。その処理内容は、VICS情報処理部17の速度情報変換部17bと同様である。
【0047】
[2.3 速度情報について]
「速度情報」は、リンク旅行速度の大小に応じた値をとる指標値であり、本実施形態では、図4に示すように、速度情報は、0から1までの値をとり、リンク旅行速度が100[km/h]のときに「0」になり、リンク旅行速度が0[km/h]のときに「1」の値をとる。
図4の「速度情報」は、リンク旅行速度に単純に反比例するものではない。つまり、リンク旅行速度−速度情報の関係式は、リンク旅行速度の複数の速度領域によって異なるものが用いられている。
前記複数の速度領域とは、具体的には、リンク旅行速度が0[km/h]〜約10(より厳密には10.53)[km/h]の第1速度領域(ゼロ近傍速度領域)、リンク旅行速度が約10(より厳密には10.5)[km/h]〜約60(より厳密には57.9)[km/h]の第2速度領域、リンク旅行速度が約60(より厳密には57.9)[km/h]超の第3速度領域(自由走行速度領域)の3つの速度領域である。
【0048】
第1速度領域は、車両の速度が、0又はそれに近い値を示すゼロ近傍速度領域として設定されたものであり、道路が混雑しているときにこのような速度領域の値が検出される。第3速度領域は、一般道路の制限速度(60km/h)以上の速度領域として設定されたものであり、道路が比較的すいており、車両が自由走行状態となり得るときにこのような速度領域の値が検出される。なお、第2速度領域は、第1及び第3速度領域の中間領域として設定されたものである。
【0049】
図4の横軸(リンク旅行速度)の値をx、縦軸(速度情報)の値をyとすると、第1速度領域におけるリンク旅行速度−速度情報の関係式は、y=1−(x/1000)に設定され、第2速度領域におけるリンク旅行速度−速度情報の関係式は、y=1.2−(x/50)に設定され、第3速度領域におけるリンク旅行速度−速度情報の関係式は、y=0.1−(x/1000)に設定されている。
【0050】
このように、リンク旅行速度−速度情報の関係直線は、第3速度領域及び第2速度領域に着目すると、第3速度領域(傾き=1/1000)では、第2速度領域(傾き=1/50)よりも、負の傾きが小さくなっている。
つまり、車両が自由走行状態となり得る自由速度領域である第3領域においては、より低速の第2速度領域に比べて、リンク旅行速度(x)の変化に対する速度情報(y)の変化の割合(負の傾き)が小さくなっている。
【0051】
また、リンク旅行速度−速度情報の関係直線は、第1速度領域及び第2速度領域に着目すると、第1速度領域(傾き=1/1000)では、第2速度領域(傾き=1/50)よりも、傾きが小さくなっている。
つまり、車両の速度がゼロ近傍である第1領域においては、より高速の第2速度領域に比べて、リンク旅行速度(x)の変化に対する速度情報(y)の変化の割合(負の傾き)が小さくなっている。
【0052】
以上のように設定された変換情報19によれば、速度情報という指標に、単なる「速度」という要素以外に、道路が混雑していて渋滞気味であるか、それとも道路が空いており車両が順調に流れているのかという渋滞度(交通流の度合)の要素も、持たせることができる。
【0053】
例えば、制限速度が100km/の道路リンクにおいてはリンク旅行速度が100km/であり、制限速度の60km/の道路リンクにおいてはリンク旅行速度が60km/hである場合、速度差は、40km/hであるが、いずれの道路リンクも車両が順調に流れており、いずれも自由走行状態であると考えられる。
一方、2つの道路リンクにおいて、一方の道路リンクのリンク旅行速度が60km/hであり、他方の道路リンクのリンク旅行速度が20km/hである場合、速度差は、上記と同様に40km/hであるが、前者の道路リンクは車両が順調に流れているが、後者の道路リンクは混雑していると考えられる。
【0054】
このように、リンク旅行速度が自由走行速度領域に達すると、道路における車両の多さ(渋滞度)とリンク旅行速度の関連性が相対的に低くなり、道路の制限速度などの別の要因によってリンク速度が変化しやすくなる。
このため、例えば、関連する他の道路リンクの交通情報(リンク旅行速度)から、推定対象道路リンクの交通情報(リンク旅行速度)を推定しようとした場合を想定すると、他の道路リンクの第3速度領域(自由走行速度領域)におけるリンク旅行速度の違いが推定対象道路リンクのリンク旅行速度の推定値に与える影響は、より低速の第2速度領域におけるリンク流行速度の違いよりも、小さくなる。
【0055】
また、第1速度領域についても、第3速度領域と同様に、速度が0〜10[km/h]であるときには、いずれの速度においても道路はかなり混雑していると考えられ、第1速度領域におけるリンク旅行速度の違いは、高速の第2速度領域におけるリンク流行速度の違いよりも、意味が少ないものとなる。
本実施形態の速度情報は、第1及び第3速度領域の傾きを小さくすることで、推定対象道路リンクの交通情報を精度良く推定することができる。
また、第1及び第3速度領域の傾きを小さくした結果、第2速度領域の傾きが大きくなり、第2速度領域におけるリンク旅行速度の違いを、速度情報という指標においてはより強調することができる。
【0056】
[2.4 交通情報推定装置による処理内容]
[2.4.1 推定処理の概要]
図5は、交通情報推定装置1(の処理装置)による交通情報推定方法を示している。
まず、推定データベース(交通情報データベース)13及び重みデータベース15に初期値を設定しておく(ステップS1)。
【0057】
そして、交通情報推定装置1が、VICS情報やプローブ情報を取得すると、入力情報処理部16がVICS情報やプローブ情報から各道路リンクの速度情報を生成する(ステップS2)。ただし、ステップS2において速度情報が取得できる道路リンクは、対象エリア内の全道路リンクのうちの一部であり、ステップS2では速度情報が得られない道路リンクがある。
【0058】
続いて、ステップS2で得られた速度情報を、推定データベース13にセットし、推定データベースDB4を更新する(ステップS3)。そして、推定システム11は、ステップS3で更新された推定データベース13の内容に基づいて、速度情報が得られていない道路リンクについての速度情報を推定し、推定した速度情報を、推定データベース13にセットし、推定データベース13を更新する(ステップS4)。このステップS4により、対象エリア内の全道路リンクについての速度情報(実測値と推測値とが混在したもの)が得られる。
【0059】
ステップS4にて得られた全道路リンクについての速度情報は、装置外部に出力される(ステップS5)。具体的には、装置1のディスプレイに表示されるか、車載装置2への提供情報として出力される。
また、ステップS4で更新された推定データベース13の内容の一部は、学習データベース14にスナップショットとして蓄積され、学習システム12による学習用データとして用いられる(ステップS6)。
【0060】
以上のステップS2〜ステップS6の処理は、速度情報が生成される度に繰り返し実行される。入力情報処理部16は、VICS情報の更新周期(例えば5分)に合わせて、VICS情報及びプローブ情報を取得して、速度情報を生成するため、ステップS2〜ステップS6の処理は、VICS情報の更新周期(例えば5分)に合わせて繰り返し実行されることになる。
【0061】
[2.4.2 速度情報推定のためのモデル]
図6は、推定システム11が、推定対象道路リンクの速度情報を推定するためのニューラルネットワークを示している。図示のニューラルネットワークは、0〜1の値をとるN個の入力信号xi(i:1〜N)それぞれに、重みwiを乗じて、出力値yを生成する単純パーセプトロンとして構成されている。
ここで、入力信号xiは、推定対象道路リンク以外の他の道路リンク(本実施形態では、推定対象道路リンクに接続された道路リンク)の速度情報であり、出力値yは推定対象道路リンクの速度情報である。
【0062】
また、重みxiは、推定対象道路リンク以外の複数の道路リンクそれぞれの速度情報を、どの程度の割合で反映させるかという値であり、推定対象道路リンクとの相関の高い道路リンク(例えば、推定対象道路リンクと同じ道路を構成し、推定対象道路リンクに隣接する道路リンク)ほど大きな値に設定されるべきであり、相関が低い道路リンクほど小さな値に設定されるべきものである。
【0063】
ただし、図6のものでは、一般的な単純パーセプトロンとは異なり、入力信号xiに乗じられることなくノードに加算される独立パラメータw0が設けられている。この独立パラメータw0は、推定対象道路リンク以外の道路リンクにおける速度情報以外の要因が、推定対象道路リンクの速度情報に与える要因(例えば、道路リンク間での制限速度の差)を表現することができ、速度情報を精度良く推定することができる。また、推定用パラメータ(重み)の学習の際に、推定用パラメータを最適値に収束させやすくなって、学習処理を容易又は高速に行える。
【0064】
以上のように、推定システム11が、ある推定対象道路リンクの速度情報を求めるには、当該推定対象道路リンクとの相関が多少なりとも認められる他の道路リンクの速度情報と、当該他の道路リンクの速度情報をどの程度ほど推定対象道路リンクの速度情報に反映させるかを示す重みと、が得られればよい。前記他の道路リンクの速度情報は、推定データベース(交通情報データベース)13に蓄積されており、重みは重みデータベース15に蓄積されており、推定システム11は、両データベース13,15から必要な情報を取得する。
【0065】
上記のようなニューラルネットは、各道路リンクについて設けられることになるため、推定システム11は、複数の道路リンクそれぞれに関する速度情報を、他の道路リンクに関する速度情報及びその寄与度を示す推定用パラメータ(重み)を用いて推定可能に構成されていることになる。
【0066】
[2.4.3 推定処理の詳細]
ここでは、図7のように接続された道路リンクを想定する。図7において、Vxは、道路リンクの速度情報(0〜1の値)を示している。また、Vxにおける添え字xは、道路リンクのリンク番号を示しており、1〜24の値をとる。つまり、図7では、リンク番号1〜24までの24個の道路リンクが存在する。また、各リンクの矢印方向は、車両の進行方向を示す。
【0067】
図7において、実線の矢印で示す道路リンク(リンク番号x=1〜10)は、VICS情報が取得可能なリンクであり、例えば、高速道路や主要幹線道路に対応する道路リンクである。また、点線の矢印で示す道路リンク(リンク番号x=11〜24)は、VICS情報が取得できないリンクであり、主に、例えば、高速道路や主要幹線道路以外の一般道路である。点線の矢印で示す道路リンクは、速度情報の推定対象道路リンクとなる可能性がある。つまり、点線の矢印で示す道路リンクについては、プローブ情報が得られた場合には、推定対象道路リンクとはならず、プローブ情報が得られなかった場合には、推定対象道路リンクとなり、速度情報の推定処理が実行される。
なお、VICS情報が取得可能な道路リンクであっても、何らかの事情でVICS情報が取得できない場合には、推定対象道路リンクとして扱われる。
【0068】
以下、図7の道路リンクを前提とし、図5も再度参照しつつ、速度情報の推定手順について詳細に説明する。
まず、推定データベース13及び重みデータベース15には、装置管理者によって、初期値が入力される(ステップS1)。
【0069】
図8に示すように、推定データベース13は、「チェック」31、「速度情報」32、「関連道路リンク情報」33、「リンク長」34、「学習?」35のデータ項目を有しており、各道路リンク(リンク番号)についてそれぞれのデータ項目の値を保存可能なものである。
【0070】
前記データ項目のうち、「チェック」31は、各道路リンクの速度情報の更新の有無及び更新された順番を示す項目である。「速度情報」32は、各道路リンクの速度情報がセットされる項目である。
「関連道路リンク情報」33は、各道路リンクに相関のある道路リンク(関連道路リンク)を示しており、ここでは、それぞれの道路リンクに接続されている道路リンク(リンク番号)を示している。
【0071】
「関連道路リンク情報」33は、「逆」、「A順」、「A逆」、「B順」、「B逆」の5種類に分けられている。
「逆」は、任意の道路リンクと逆方向の道路リンクのリンク番号を示し、例えばリンク番号1の道路リンクについては、リンク番号8の道路リンクが「逆」の道路リンクとなる。
「A順」は、ある道路リンクの後方で順方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号12,7,15の道路リンクが「A順」の道路リンクとなる。
「A逆」は、ある道路リンクの後方で逆方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号11,15,13の道路リンクが「A逆」の道路リンクとなる。
【0072】
「B順」は、ある道路リンクの前方で順方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号4,9の道路リンクが「B順」の道路リンクとなる。
「B逆」は、ある道路リンクの前方で逆方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号3,6の道路リンクが「B逆」の道路リンクとなる。
【0073】
また、前記データ項目のうち「リンク長」34は、各道路リンクのリンク長を示すものである。「学習?」35は、各道路リンクの速度情報等が学習部20(学習システム12)による学習のためのデータ(学習用データ)となるものであるか否かを示しており、ここでは0又は1の値をとる。「0」はその道路リンクの速度情報等が学習用データとはならないことを示しており、「1」はその道路リンクの速度情報等が学習用データとなることを示している。
【0074】
ステップS1の初期値入力は、装置1の運用開始時やリセット時に行われ、推定データベース11については、上記データ項目のうち、「速度情報」32、「関連道路リンク情報」33、「リンク長」34について初期値が設定される。「速度情報」32の初期値としては、例えば、全道路リンクについて0を設定すればよい。「関連道路リンク情報」33及び「リンク長」34の初期値については、対象エリアの道路構成に従って設定される。「関連道路リンク情報」33及び「リンク長」34の初期値は、VICS情報及びプローブ情報からなる交通情報(速度情報)を取得しても更新されることはない。
【0075】
一方、「速度情報」34の値は、VICS情報及びプローブ情報からなる交通情報(速度情報)を取得する度に、全道路リンクについて更新される(ステップS3,S4)。
また、「チェック」31については、交通情報(速度情報)を取得する度に(ステップS2)、0に初期化される。「学習?」35についても、交通情報(速度情報)を取得する度に(ステップS2)、各道路リンクの速度情報等を学習用データとすべきか否かに応じて0又は1に設定される。
【0076】
図9に示すように、重みデータベース15には、各道路リンクにおける速度情報の推定値を他の道路リンクの速度情報から求める際に用いる重みwiが、初期値として設定される。重みwiは、各道路リンクについて、「関連道路リンクの数+1」ほど設定される。図9において、w0は独立パラメータであり、w1以降は関連道路リンクの速度情報それぞれに乗じられる重みである。
【0077】
推定用パラメータである重みwiは、学習システム12による学習によって、より適切な値へと自動的に更新されるため、初期値としては、適当な値を設定してもよい。したがって、初期設定が容易である。
【0078】
さて、上記の初期化を行ったのち、図7に示す道路リンクに関し、ある時点において、図10のようなVICS情報及びプローブ情報(交通情報)が得られたものとする。図10では、リンク番号1〜10の道路リンクについてのVICS情報(リンク旅行時間)が得られ、リンク番号20の道路リンクについてのプローブ情報が得られている。他の道路リンクについてはVICS情報もプローブ情報も得られていない。なお、図10では、表記の容易化のため、リンク番号20の道路リンクについてのプローブ情報を、VICS情報と同様に「リンク旅行時間」で示した。
【0079】
また、図10の情報では、プローブ情報が存在する道路リンク(リンク番号20)については、学習対象となることを示す値「1」が設定されており、VICS情報が存在する道路リンク(リンク番号1〜10)については、学習対象ではないことを示す値「0」が設定されている。
【0080】
図10のような入力情報が取得された場合、この情報における「旅行時間」は、入力情報処理部16によって「速度情報」に変換され(ステップS2)、その速度情報によって、推定データベース13の対応する道路リンクの「速度情報」32が更新される(第1回目の更新;ステップS3)。更新された道路リンクについては、「チェック」31に、第1回目の更新で速度情報が更新されたことを示す「1」が設定される。また、図11の入力情報の「学習対象」が「1」である道路リンク(ここでは、リンク番号20の道路リンク)については、「学習?」35が「1」に設定される。
以上のようにして第1回目の更新(入力情報のセット)が行われた後の推定データベース13の内容を、図11に示す。
【0081】
続いて、速度情報が未更新の道路リンク(リンク番号11〜19,21〜24)についての速度情報の推定を行って、当該推定値により推定データベース13の更新を行う(ステップS4)。
具体的には、まず、「チェック」31項目に、前回の更新を示す「1」が設定されている道路リンク(リンク番号1〜10,20)の関連道路リンク(隣接道路リンク)のうち、今回の入力情報(図10)に基づく速度情報の更新が未だなされていない道路リンク(チェック=0)を抽出する。ここでは、リンク番号12,15,11,13,19,18,17,21,24,14,16の11個の道路リンクが抽出される(図12参照)。これら11個の道路リンクが、ここでの推定対象道路リンクとなる。
【0082】
そして、推定システム11は、11個の推定対象道路リンクそれぞれについての関連道路リンクを、推定データベース13から読み出すとともに、11個の推定対象道路リンクそれぞれについて設定された重み(推定用パラメータ)を、重みデータベース15から読み出し、これらを用いて、各推定対象道路リンクの速度情報の推定値を算出する。算出された、速度情報の推定値は、推定データベース13の「速度情報」にセットされ、速度情報についての第2回目の更新が行われる。なお、更新された道路リンクについては、「チェック」31に、第2回目の更新で速度情報が更新されたことを示す「2」が設定される。
【0083】
上記推定対象道路リンクのうち、例えば、リンク番号12,15,11,13の道路リンクの速度情報の推定値(V12,V15,V11,V13)を求めるための演算式は、下記のとおりである。
V12=w0+w1V11+w2V1+w3V5+w4V13+w5V8+w6V7+w7V15
V15=w0+w1V13+w2V20+w3V16+w4V17+w5V14+w6V1+w7V11
+w8V5+w9V8+w10V12+w11V5
V11=w0+w1V12+w2V8+w3V15+w4V7+w5V1+w6V11+w7V5
V13=w0+w1V15+w2V8+w3V12+w4V7+w5V1+w6V11+w7V5
+w8V14+w9V17+w10V16+w11V20
【0084】
そして、「チェック」31項目に、前回の更新を示す「2」が設定されている道路リンク(リンク番号11〜19,21,24)の関連道路リンク(隣接道路リンク)のうち、今回の入力情報(図10)に基づく速度情報の更新が未だなされていない道路リンク(チェック=0)を抽出する。ここでは、リンク番号22,23の2個の道路リンクが抽出される(図13参照)。これら2個の道路リンクが、次の推定対象道路リンクとなる。
【0085】
そして、推定システム11は、2個の推定対象道路リンクそれぞれについての関連道路リンクを、推定データベース13から読み出すとともに、2個の推定対象道路リンクそれぞれについて設定された重み(推定用パラメータ)を、重みデータベース15から読み出し、これらを用いて、各推定対象道路リンクの速度情報の推定値を算出する。算出された、速度情報の推定値は、推定データベース13の「速度情報」にセットされ、速度情報についての第3回目の更新が行われる。なお、更新された道路リンクについては、「チェック」31に、第3回目の更新で速度情報が更新されたことを示す「3」が設定される。
【0086】
上記のような処理は、全ての道路リンクについての速度情報が推定されるまで繰り返される(ステップS4)。ここでは、3回の更新により全ての速度情報が補完されたため、推定処理を終了する。
【0087】
すると、推定データベースの内容の出力が行われる(ステップS5)。
さらに、今回の入力情報(図10)に基づく、推定処理が終了した推定データベース13の各道路リンクのデータのうち、「学習?」35に「1」が設定されたリンク番号20の道路リンクのスナップショット(図14参照)を、学習データベース14に追加する。ここで、スナップショットとは、「学習?」35に「1」が設定された道路リンクの「速度情報」と、この「学習?」35に「1」が設定された道路リンクの速度情報を推定するために用いられる一又は複数の他の道路リンク(関連道路リンク)の速度情報と、の組み合わせを記憶したものである。ここで、「学習?」35に「1」が設定された道路リンクの速度情報は、プローブ情報から得られた値であるから実測値である。また、当該道路リンクの関連道路リンクの「速度情報」には、VICS情報から得た実測値と推測値とが混在している。
【0088】
スナップショットは、入力情報が取得されて、推定データベースの全道路リンクの更新(ステップS3,S4)が行われる度に発生し、学習用データとして蓄積される。このスナップショットは、プローブ情報を取得できた道路リンクについて発生する。
したがって、上記の例では、リンク番号20の道路リンクのみスナップショットが発生したが、推定データベースの全道路リンクの更新(ステップS3,S4)が何度も行われると、他の道路リンクについてもスナップショットが蓄積される。また、入力情報が繰り返し発生するほどの十分な時間が経過すると、一つの道路リンクについて複数のスナップショットが蓄積される。
【0089】
[2.4.4 学習処理の詳細]
図15は、複数の道路リンクについて、それぞれ複数のスナップショットが蓄積された学習データベース14の内容を示している。
このようにして多数のスナップショットが学習用データとして蓄積された学習データベース14に基づいて、学習システム12が、重みデータベース15に記憶されている重み(推定用パラメータ)の学習(最適化)を行って、重みデータベース15の内容を更新する。
【0090】
図16は、学習システム12による学習処理の手順を示している。まず、学習システム12は、誤差判定のための許容誤差、ニューラルネットワーク(図6)を構成する中間層の数、学習計数等の学習用のパラメータ設定を行う(ステップS11)。
学習システム12は、例えば図6に示すようなニューラルネットワークを最適化(学習)するニューロエンジンとして構成されている。つまり、学習システム12は、学習データベース14に蓄積されているスナップショットのうち、実測値である速度情報を教師信号とし、教師信号となる速度情報を持つ道路リンクの関連道路リンクについての速度情報から、この教師信号を出力するための適切なニューラルネットワークを再構築する。すなわち、学習システム12は、実測値である速度情報と、当該速度情報を持つ道路リンクの関連道路リンクについての速度情報とからなる学習用データから、重みの最適値を算出する。重みの最適値の算出は、例えば、最小自乗法等によって行える。
【0091】
重みの最適値の算出は、関連道路リンクについての速度情報から算出される速度情報が、教師信号に近づいて、教師信号との誤差が、設定された許容誤差未満になるまで行われる(ステップS13)。
重みが収束して学習処理が終了すると、得られた重みは、重みデータベース15に反映され、重みデータベース15が更新される。
【0092】
重みデータベース15が更新された後に、VICS情報及びプローブ情報からなる入力情報が発生すると、推定システム11による速度情報の推定は、新たな重みを用いて、より精度良く行われる。このように、本実施形態の交通情報推定装置1では、運用を続けることで、交通情報(速度情報)の推定精度が自然に向上する。
【0093】
[2.5 交通情報推定装置が更に有している機能]
[2.5.1 推定処理]
前記実施形態では、図10に示したように、リンク番号1〜10の道路リンクについてVICS情報が取得され、リンク番号20の道路リンクについてのプローブ情報が取得され、残りの道路リンクの速度情報は推定された。そして、リンク番号20の道路リンクの実測値に基づく速度情報が用いられて、学習処理が行われた場合を説明した。
ここで、リンク番号20の道路リンクに対応する道路は、複数の車線からなり、このリンク番号20の道路リンクは、図7に示しているように、その下流側で道路が分岐している場合について説明する。
【0094】
例えば、図17に示しているように、リンク番号20の道路リンクR20の道路が二車線L1,L2からなり、右側の車線L1は、先にある隣のリンク番号14の道路リンクR14でもほぼ同じ速度で継続して車両が走行する本線であり、左側の車線L2は、分岐した側道(リンク番号15)へと続く車線であり、しかもこの側道及びその下流側となる車線L2では、車両が渋滞しているとする。なお、このような道路リンクR20を含む道路としては、例えば、高速道路の降り口である。
【0095】
この場合、同じ道路R20であっても、右側の車線L1を走行したプローブ車両3から取得される速度情報(プローブ情報)V20−1は、比較的速い速度(例えば規格化速度で0.1)を示す値であるのに対し、車線L2を走行したプローブ車両3から取得される速度情報(プローブ情報)V20−2は、比較的遅い速度を示す値(例えば規格化速度で0.42)となることが考えられる。
このように、道路リンクR20の速度情報が実測値に基づいて得られたとしても、二種類の速度情報V20−1,V20−2が取得される可能性があり、このような速度情報を用いて、推定システム11が、当該道路リンクR20に関連する道路リンク(例えば、その先にある枝道路リンクR14,R15)の速度情報を推定しても、また、学習システム12が、最適化する処理をしても、正確なものとならないおそれがある。
【0096】
そこで、本実施形態の交通情報推定装置1(推定システム11)において、学習システム12は、複数の枝道路リンク別に分類された学習用データを用いて、当該枝道路リンク別に重みを最適化する処理を行うことができ、この重みの最適化の処理が終了すると、その処理によって得られた新たな重みの値によって、重みデータベースが更新される。
そして、推定システム11は、枝道路リンク別に最適化された(更新された)重みを用いて推定対象道路リンクの交通情報を推定する。なお、高速道路の降り口の他、分岐前の道路に複数の車線があり、それらが右折専用車線を含むことなどによって、各車線で交通情報が大きく異なる可能性がある道路についてこの構成を適用することが有効である。そのような一部の道路は予めシステムに登録することができる。以下、この構成について説明する。
【0097】
本実施形態では、図2に示しているように、学習システム12における学習用データ(スナップショット)を蓄積する学習データベース14、各道路リンクの速度情報等を蓄積する推定データベース13、及び、推定用パラメータ(重み)を蓄積するための重みデータベース15を備えているが、この学習データベース14に、学習用データを、所定の方式で分類して蓄積させる選別部51を備えている。また、選別部51は、重みデータベース15に、推定用パラメータ(重み)を、所定の方式で分類して蓄積させる機能も有している。
本実施形態(図15)では、選別部51は、リンク番号20の道路リンクR20の学習用データを、当該道路リンクR20よりも後で分岐して存在する二つの枝道路リンク(リンク番号20(→15)と、リンク番号20(→14))別に分類して、学習データベース14に蓄積させる場合を説明している。
【0098】
学習データベース14には、枝道路リンク(リンク番号14と15)別に分類されて学習用データが蓄積され、このようにして学習用データが蓄積されると、学習システム12は、前記枝道路リンク別に分類された学習用データを用いて、当該枝道路リンク別(リンク番号14と15)に重みを最適化する処理を行う。そして、枝道路リンク別に重みが最適化されると、新たな重みの値によって、重みデータベースが更新される(図19参照)。図19は、図9の一部を書き直した重みデータベース15の説明図である。図19では、リンク番号20の道路リンクR20に関して、枝道路リンク(リンク番号14と15)別に最適化された(更新された)重みが蓄積されている。
このように(図15及び図19参照)、同じ道路リンクR20に関して、学習用データ(速度情報)及び重みを、行き先別に分類して蓄積させている。
【0099】
なお、このように、プローブ車両3の行き先別に分類して各データベース14,15に情報を蓄積させるためには、当該プローブ車両3が道路リンクR20を通過した後の行き先を判別する必要があり、このために、推定システム11は、プローブ車両3の行き先を判別する判別部52(図2参照)を備えている。
ここで、プローブ車両3の車載装置2は、複数の連続した道路リンクのプローブ情報をまとめて送信する(例えば5分毎に路側通信機4に送信する)ように構成されており、また、このプローブ情報には、プローブ車両3のID、位置及び時刻に関する情報が含まれている。このため、判別部5は、このようなプローブ情報を取得することで、プローブ車両3の行き先(走行軌跡)を判別することができる。
【0100】
したがって、前記選別部51は、取得したプローブ情報から、各道路リンクの速度情報及び行き先を判別した情報を取得すれば、リンク番号20の実測値に基づく速度情報を、枝道路リンク(リンク番号14と15)別に分類して蓄積させることが可能となる。すなわち、あるプローブ車両3から取得されたリンク番号20の道路リンクにおける速度情報が、リンク番号15の道路リンクR15をその後に走行したものであれば、リンク番号20の速度情報V20−2として、0.42が蓄積される(図15の破線で囲んでいる部分)。
【0101】
具体的に説明すると、プローブ情報によれば、リンク番号20の道路リンクにおける実測値に基づく速度情報がリンク番号14の枝道路リンクへ走行したものであると判別されると、図15において、リンク番号20(→14)の道路リンクの「速度情報」のデータ項目に、リンク番号14の枝道路リンクR14に進行する場合の速度情報V20−1を蓄積させ、これに組み合わせて、このリンク番号20の道路リンクの速度情報を推定するために用いられる他の道路リンクの速度情報を、学習用データとして蓄積させる。
これに対して、プローブ情報によれば、リンク番号20の道路リンクにおける実測値に基づく速度情報がリンク番号15の枝道路リンクへ走行したものであると判別されると、リンク番号20(→15)の道路リンクの「速度情報」のデータ項目に、リンク番号15の枝道路リンクR15に進行する場合の速度情報V20−2を蓄積させ、これに組み合わせて、このリンク番号20の道路リンクの速度情報を推定するために用いられる他の道路リンクの速度情報を、学習用データとして蓄積させる。
【0102】
また、図19では、リンク番号14と15の道路リンクそれぞれの関連道路リンクとなるリンク番号20の道路リンクのための推定用パラメータ(重み)を、二つの枝道路リンク(リンク番号14と15)別に分類して、重みデータベース15に蓄積させている。
つまり、リンク番号14の枝道路リンクR14に関して、各重み(図例では重みw3)の項目に、リンク番号14の枝道路リンクに進行する場合の重みを蓄積させ、さらにこれとは区別して、リンク番号15の枝道路リンクに進行する場合の重みを蓄積させる。そして、リンク番号15の枝道路リンクR15に関して、各重み(図例では重みw2)の項目に、リンク番号14の枝道路リンクに進行する場合の重みを蓄積させ、さらにこれとは区別して、リンク番号15の枝道路リンクに進行する場合の重みを蓄積させる。
【0103】
推定システム11が、二つ枝道路リンク(リンク番号14と15)の内の一つの枝道路リンクを推定対象道路リンクとして速度情報を推定する場合について説明する。
二つの枝道路リンク(リンク番号14と15)別に、つまり、行き先別に分類されて重みデータベース15(図19)に蓄積されている重みから、前記一つの枝道路リンクに対応している重みを選び、選んだ重みを用いる。
【0104】
すなわち、例えば、リンク番号15の枝道路リンクR15の速度情報を推定する場合、前記のとおり、下記の演算式により枝道路リンクR15の速度情報の推定値を求めることができる。
V15=w0+w1V13+w2V20+w3V16+w4V17+w5V14+w6V1+w7V11
+w8V5+w9V8+w10V12+w11V5
この際、枝道路リンクR15の関連道路リンクであるリンク番号20の速度情報は、推定データベースから選ばれ、図19において、リンク番号20の道路リンクの速度情報に対応する重みw2として、20→15である0.7が選ばれる。
そして、前記実施形態と同様にして、上記の演算式により枝道路リンクR15の速度情報の推定値が算出される。
【0105】
前記説明では、枝道路リンクR15の関連道路リンクであるリンク番号20の速度情報は、推定データベース(例えば図11)から選ばれるとして説明した。しかし、このリンク番号20の速度情報が、推定システム11によって推定されたものである場合、つまり、推定システム11が、二つ枝道路リンク(リンク番号14と15)の手前にある道路リンク(リンク番号20)を推定対象道路リンクとして速度情報を推定している場合について説明する。
【0106】
推定システム11による推定処理は、下記の演算式(V20=・・・)が用いられるが、枝道路リンク(リンク番号14と15)別に分類されている重み(図19参照)それぞれが用いられて、枝道路リンク毎の速度情報が推定されている。つまり、二種類の速度情報が推定されている。
V20=w0+w1V17+w2V21+w3V24+w4V14+w5V15+w6V16+w7V13
このように、上記の演算式(V20=・・・)によりリンク番号20の道路リンクの速度情報を推定することができるが、この場合に用いられる重みw0からw7までのそれぞれ値は、リンク番号14の枝道路リンクへ向かう場合(図19のリンク番号20の上段→14)と、リンク番号15の枝道路リンクへ向かう場合(図19のリンク番号20の下段→15)との、二種類が区別されて用いられる。
この場合、図18に示しているように、リンク番号20→14へ向かう速度情報V20−1と、リンク番号20→15へ向かう速度情報V20−2とが推定される。速度情報V20−1、V20−2の一方を推定する場合において、その推定に他方の交通情報を用いるようにしてもよい。
【0107】
なお、前記のとおり、推定システム11が、分岐前のリンク番号20の道路リンクを推定対象道路リンクとして速度情報を推定し、これが推定データベースに蓄積されている場合において、例えば、リンク番号15の枝道路リンクR15の速度情報を推定するためには、上記のとおり、上記演算式(V15=・・・)により枝道路リンクR15の速度情報の推定値を求めることができるが、この際、リンク番号20→15へ向かう速度情報V20として、V20−2である0.42が選ばれる。
なお、このリンク番号15の枝道路リンクR15の速度情報を推定する場合では、速度情報V20としては、少なくともV20−2が用いられていればよく、V20−2の他に、V20−1を用いてもよい。この場合、V20−2の重みは高い値に設定されるが、V20−1の重みを小さく設定すればよい。
【0108】
この推定システム11によれば、道路リンクがその先で分岐していて、同じ道路リンクから複数種類の速度情報が取得される可能性があっても、適切な重みが選ばれるので、推定対象道路リンクの速度情報を正確に推定することができ、また、推定用パラメータの最適化を正しく行わせることができる。
【0109】
[2.5.2 推定処理]
また、前記選別部51(図2参照)は、他の機能として、学習データベース14に、道路リンクの速度情報を、暦、時間帯、及び、天候の内の少なくとも一つの条件を分類基準として分類して蓄積させる機能を有している。さらに、選別部51は、重みデータベース15に、推定用パラメータ(重み)を、暦、時間帯、及び、天候の内の少なくとも一つの条件を分類基準として分類して蓄積させる機能も有している。なお、図20では、学習データベース14及び重みデータベース15それぞれに、暦、時間帯、及び、天候すべてについて、それぞれ毎のデータベースが用意されている。
【0110】
そして、学習システム12は、前記歴等の条件別に分類された学習用データを用いて、当該条件別に推定用パラメータを最適化する処理を行うことができ、この重みの最適化の処理が終了すると、その処理によって得られた新たな重みの値によって、重みデータベースが更新される。
そして、推定システム11は、前記条件別に最適化された(更新された)重みを用いて推定対象道路リンクの交通情報を推定する。以下、この構成について説明する。
【0111】
選別部51は、例えば、歴を条件として分類するために、カレンダーの機能を有しており、学習用データ及び重みを曜日毎や祝日毎に分けて蓄積させる。つまり、曜日毎の学習データベース14、及び、曜日毎の重みデータベース15が設定されている。そこで、学習システム12は、曜日毎や祝日毎に分けて蓄積されている学習用データ毎に、学習処理を行う。そして、推定システム11による推定処理では、その処理を行う曜日に応じた重みデータベース15が用いられ、祝日には当該祝日用の重みデータベース15が用いられる。
【0112】
また、同様に、選別部51は、時計機能を有しており、学習用データ及び重みを時間帯毎に分けて蓄積させる。つまり、例えば朝、日中、夕方、夜間及び深夜それぞれの学習データベース14及び重みデータベース15が設定されている。そこで、学習システム12は、時間帯毎に分けて蓄積されている学習用データ毎に、学習処理を行う。そして、推定システム11による推定処理では、その処理を行う時間帯に応じた重みデータベース15が用いられる。
また、選別部51は、学習用データ及び重みを天候条件(晴れ、曇り、雨及び雪)毎に分けて蓄積させる。つまり、天候条件毎の学習データベース14及び重みデータベース15が設定されている。そこで、学習システム12は、天候条件毎に分けて蓄積されている学習用データ毎に、学習処理を行う。そして、選別部51は、例えばVICSセンター等の外部から天候情報を取得することができ、推定システム11による推定処理では、その処理を行う際の天候条件に応じた重みデータベース15が用いられる。
【0113】
このように、暦、時間帯、及び、天候を分類基準として分類されて、個別の学習データベース14及び個別の重みデータベース15が用意されている。
そして、学習用データは、学習データベース14に、前記歴等の各条件を分類基準として分類して蓄積され、学習システム12によって条件別に最適化を行うことで、条件毎に重みを更新することができる。このため、この条件毎の重みを用いて推定システム11が推定処理を行うことで、正確に速度情報が推定される。
そして、推定システム11は、推定対象道路リンクの速度情報を推定する際に、前記分類基準により分類されて重みデータベース15に蓄積されている重みから、当該推定の際に該当している条件に対応している重みを選び、選んだ重みを用いる。これにより、処理の時点の分類に応じた演算式が用いられて速度情報が推定されることとなる。
【0114】
以上より、同じ道路リンクであっても、暦、時間帯、及び、天候が異なることによって、異なる傾向の速度情報が実測値に基づいて取得されることがあっても、学習データベース14及び重みデータベース15が所定の分類基準により分類されており、処理の際に適合しているデータベースを用いることで、推定対象道路リンクの交通情報を正確に推定することができ、また、推定用パラメータの学習を正しく行わせることができる。
【0115】
なお、前記推定処理の説明では、枝道路リンク別に分類された学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化する場合、及び、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類された学習用データを用いて、当該条件別に推定用パラメータを最適化する場合を説明したが、例えば、道路リンクが複数車線からなる場合、車線別に分類された学習用データを用いて、当該車線別に推定用パラメータを最適化し、この車線別に最適化された重みを用いて推定対象道路リンクの交通情報を推定してもよい。
【0116】
[2.5.3 速度情報推定のためのモデルの選択]
前記実施形態では、推定システム11が速度情報を推定するためのニューラルネットワークとして、図6のような単層のパーセプトロンを用いる場合を説明したが、これに限られるものではなく、入力層、中間層、出力層を有する多層パーセプトロンであってもよい。そこで、推定システム11は、推定対象道路リンクの交通情報を推定する際に用いる数学モデル(算出方式)を、当該推定対象道路リンクの道路種別に応じて変更して、速度情報を推定する機能を有している。
【0117】
図21は、この推定システム11によるモデルの変更を説明するフロー図である。例えば、高速道路のように、ある推定対象道路リンクに対応する道路とその周辺道路との相関関係が単純である場合(ステップS21のYesの場合)、交通情報を推定する際に用いるモデルとして、図6のような単層のパーセプトロンのような線形モデルが採用される(ステップS22)。線形モデルを採用すれば、処理時間を短くすることができる。なお、道路リンクは、中央装置(交通情報推定装置)1側で設定されていることから、各道路リンクの道路の種別を、交通情報推定装置1は把握できる。
【0118】
これに対して、推定対象道路リンクに対応する道路とその周辺道路との相関関係が複雑である場合、例えば、推定対象道路リンクが、そのリンク途中で車両の流入や流出が多い一般道路である場合(ステップS21のNoの場合)、交通情報を推定する際に用いる算出方式として、多層パーセプトロンのような非線形モデルが採用される(ステップS23)。推定モデルを、多層パーセプトロンとして構成すると、推定対象道路リンクと他の道路との間で、速度情報が非線形関係を持つ場合であっても、推定対象道路リンクの速度情報を適切に求めることができる。
【0119】
図21の場合では、高速道路や一般道路等の道路種別に応じて数学モデルを変更し、速度情報を推定する場合を説明したが、推定システム11による速度情報の推定結果の精度に応じて、数学モデル(算出方式)を変更してもよい。図22は、この推定システム11によるモデルの変更を説明するフロー図である。
【0120】
推定システム11は、線形モデルを用いて各道路リンクの速度情報を推定する(ステップS25)と共に、その推定結果の誤差も求める(ステップS26)。この誤差は、ある道路リンクにおける実測値として取得された速度情報と、当該ある道路リンクにおける推定値として取得された速度情報との差に基づいて得られる。そして、この誤差が、予め設定されている閾値よりも大きい場合(ステップS27のYesの場合)、当該道路リンクにおいては、それ以後、線形モデルではなく、非線形モデルを採用して速度情報を推定するように設定される(ステップS28)。
【0121】
誤差が閾値以下である場合(ステップS27のNoの場合)、引き続いて、その道路リンクでは、線形モデルを採用して速度情報を推定するように設定される(ステップS29)。
この推定システム11によれば、原則、線形モデルを採用することで処理時間の短縮かを図るが、線形モデルでは推定精度が低い場合にのみ、非線形モデルを採用し、全体における推定精度を確保することができる。
【0122】
[2.5.4 速度情報の推定方式の選択]
前記実施形態の推定システム11では、VICS情報やプローブ情報が取得されない道路リンク(推定対象道路リンク)については、他の道路リンクの交通情報及び推定用パラメータ(重み)が用いられて、例えば図6に示したニューラルネットにより、その速度情報が推定される場合を説明した。
このニューラルネットによる数学モデルを採用することで、推定対象道路リンクの速度情報を精度良く推定することができ、しかも、この交通情報推定装置1は、前記学習システム12を備えているため、実測値に基づく速度情報が得られる毎に推定精度を更に高めることが可能となる。
【0123】
しかし、道路リンクの種別によっては、様々な要因が重なることで、ニューラルネットによる推定処理を行ったとしても、推定値にばらつきが生じることがある。このばらつきが大きいと、推定結果(推定値)の信頼度は低いと考えられる。
そこで、本実施形態の推定システム11は、推定値の信頼度に基づいて、ニューラルネットワークを用いた推定処理とは別の推定処理に変更して、推定対象道路リンクの交通情報を推定する機能を有している。このために、推定システム11は、ニューラルネットワークによる推定対象道路リンクの速度情報の推定処理についての信頼度を求める信頼度判定部53(図2参照)を有している。なお、本実施形態での信頼度は、ニューラルネットワークにより求めた推定値のばらつきにより判定される。つまり、推定値の標準偏差とその閾値とを比較することにより、信頼度が判定される。なお、信頼度は、推定値による速度情報と実測値による速度情報との誤差に基づいて、判定されてもよい。
【0124】
図23は、この推定システム11による選択処理を説明するフロー図である。各道路リンクについて、例えば図6に示したニューラルネットが設定されていることから、推定システム11は、各道路リンクにおける速度情報を、他の道路リンクに関する速度情報及び重み(推定用パラメータ)を用いて推定することができる(ステップS31)。そして、推定された道路リンクにおける速度情報は、推定データベース13に蓄積され、その後更新もされるが、過去に推定された速度情報についても、推定処理のためには用いないが、蓄積されている(ステップS32)。
【0125】
このようにして、ある道路リンクに関して、推定値に基づく速度情報が複数蓄積されると、前記信頼度判定部53は、これら複数の推定値に基づく速度情報についての標準偏差を算出する(ステップS33)。そして、信頼度判定部53によって、この標準偏差と予め設定されている閾値とが比較され、標準偏差が閾値を超えている場合(ステップS34のYesの場合)、信頼度判定部53により、前記のとおりニューラルネットワークを用いて求めた推定値の信頼度は低いと判定される。この判定がされると、前記ある道路リンクに関しては、それ以降、ニューラルネットワークを用いた推定処理とは別の推定処理に変更されて(ステップS35)推定システム11により推定対象道路リンクの交通情報が推定される。
【0126】
これに対して、前記標準偏差が閾値以下である場合(ステップS34のNoの場合)、信頼度判定部53により、ニューラルネットワークを用いた前記推定処理の信頼度は高いと判定される。この場合、前記ある道路リンクに関して、そのままニューラルネットワークによる推定処理が行われる(ステップS36)。
【0127】
なお、推定対象道路リンクの速度情報を推定する前記「別の推定方式」としては、図6に示したような数学モデルを用いて演算により速度情報を求める推定方式ではなく、例えば、過去に取得した他の道路リンクの交通情報(速度情報)を統計して得た統計情報を用いて、推定対象道路リンクの交通情報(速度情報)を推定する方式がある。このために、推定システム11は、各道路リンクに関して、プローブ情報等から過去に取得した道路リンクの交通情報(速度情報)を蓄積させる統計データベース(図示せず)を有している。
【0128】
この統計情報を用いて速度情報を推定する方式についてさらに説明する。この方式は、過去に取得され蓄積されている実測値についての交通情報を用いて、推定対象道路リンクの交通情報を推定する方式である。
つまり、各道路リンクについて、VICS情報やプローブ情報を取得することにより収集した実測値に基づく交通情報の平均値を、統計情報としてデータベースに蓄積させておく。なお、この交通情報の平均値は、日種(例えば曜日、祝日)、及び、時間帯(例えば15分幅)別に蓄積されている。
そして、交通情報の推定処理を行う場合、当該推定処理を行う日種(例えば曜日、祝日)、及び、時間帯(例えば15分幅)に対応している前記統計情報(前記交通情報の平均値)を、推定値として採用する方式である。なお、後述する第二推定処理機能も、この方式とすることができる。
【0129】
[2.5.5 速度情報の推定方式の選択]
交通情報推定装置1は、前記学習システム12を備えているため、実測値に基づく速度情報が取得されると、重みの最適値が求められ、この結果、この重みを用いて行われる推定システム11による速度情報の推定精度を高めることが可能となる。しかし、道路リンクの種別によっては、様々な要因が重なることで、ニューラルネットによる推定処理を行ったとしても、実測値と推定値との間の誤差が大きいままとなる場合もある。
【0130】
そこで、本実施形態の推定システム11は、推定対象道路リンクの速度情報を推定する機能として、第一推定処理機能と第二推定処理機能とを有している。第一推定処理機能は、上記のとおり説明した推定処理を行う機能であり、他の道路リンクの速度情報及び推定用パラメータ(重み)を用いたニューラルネットワーク(例えば図6参照)によって、推定対象道路リンクの速度情報を推定する。
一方、第二推定処理機能は、図6に示したような数学モデルを用いて演算により速度情報を求める推定方式ではなく、過去に取得した他の道路リンクの速度情報を統計して得た統計情報を用いて、推定対象道路リンクの速度情報を推定する機能である。なお、この第二推定処理機能のために、推定システム11は、各道路リンクに関して、プローブ情報等に基づいて過去に取得した道路リンクの速度情報を蓄積させる統計データベース(図示せず)を有している。
そして、推定システム11は、実測値に基づく速度情報と、第一推定処理機能及び第二推定処理機能それぞれによって推定された速度情報との誤差に基づいて、当該第一推定処理機能と当該第二推定処理機能との内のいずれを用いるか決定する機能を有している。
【0131】
図24は、この推定システム11による選択処理を説明するフロー図である。プローブ情報等により、ある道路リンクにおける実測値に基づく速度情報が得られたとする(ステップS41)。
なお、各道路リンクについて、例えば図6に示したニューラルネットが設定されていることから、第一推定処理機能によれば、前記ある道路リンクに関する速度情報が、他の道路リンクにおける速度情報及び重み(推定用パラメータ)が用いられて推定される(ステップS42−1)。
また、前記統計データベースには、各道路リンクについての過去に取得した道路リンクの速度情報が蓄積されているので、第二推定処理機能によれば、前記ある道路リンクに関する速度情報を推定することができる(ステップS42−2)。
【0132】
そして、前記ある道路リンクにおける実測値に基づく速度情報が得られていることから(ステップS41)、この実測値に基づく速度情報と、第一推定処理機能によって推定された速度情報との第一誤差を求め(ステップS43−1)、また、前記実測値に基づく速度情報と、第二推定処理機能によって推定された速度情報との第二の誤差とを求める(ステップS43−2)。
【0133】
そして、これら第一の誤差及び第二の誤差は、一定期間(例えば1週間)の間、複数回求められ、当該一定期間の平均値を求める。
推定システム11は、第一誤差(平均値)と第二誤差(平均値)とを比較し、第一誤差が第二誤差以下である場合(ステップS44のYesの場合)、前記ある道路リンクに関して、その後、実測値に基づく速度情報が得られない際、第一推定処理機能を採用して速度情報を推定する(ステップS45)。
第一誤差が第二誤差を超えている場合(ステップS44のNoの場合)、前記ある道路リンクに関して、その後、実測値に基づく速度情報が得られない際、第二推定処理機能を採用して速度情報を推定する(ステップS46)。
【0134】
このように、ある道路リンクについて実測値に基づく速度情報が得られることにより、当該ある道路リンクでは、第一推定処理機能を採用するか、第二推定処理機能を採用するかの判定が、一定期間毎に行われ、前記ある道路リンクで採用される機能をどちらとするかについて設定される。これにより、各道路リンクにおいて、他方と比較して誤差が小さくなる推定処理機能により、推定対象道路リンクの速度情報を推定することができる。
【0135】
[2.5.6 速度情報の選択]
図3及び図4で説明したように、速度情報変換部17b,18bは、「速度−速度情報」変換情報19に基づいて、道路リンクにおける車両の速度を示すリンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる「速度情報」(規格化速度)という指標値に変換している。
前記実施形態では、「速度−速度情報」変換情報19が、図4に示すように設定されたものであり、この第一の変換情報19は、例えば一般道路向けのために設定されたものである。
「速度−速度情報」変換情報として、図4に示している関係以外に、図25に示している「速度−速度情報」変換情報59も設定されており、これら変換情報19,59が入力情報処理部16に記憶されている。第二の変換情報59は、例えば高速道路向けのために設定されたものである。
【0136】
そして、本実施形態では、前記速度情報変換部17b,18bそれぞれは、道路リンクの道路種別に応じて「速度−速度情報」変換情報を変更して、リンク旅行速度を「速度情報」(規格化速度)に変換する機能を有している。
例えば、VICS情報やプローブ情報から取得されたリンク旅行速度が、一般道路を走行している車両から取得されたものである場合、当該リンク旅行速度は、図4に示している「速度−速度情報」変換情報19が用いられ「速度情報」(規格化速度)に変換される。なお、道路リンクは、中央装置(交通情報推定装置)1側で設定されていることから、各道路リンクの道路の種別を、入力情報処理部16は把握できる。
【0137】
これに対して、リンク旅行速度が、高速道路を走行している車両から取得されたものである場合、当該リンク旅行速度は、図25に示している「速度−速度情報」変換情報59が用いられ「速度情報」(規格化速度)に変換される。
このように、一般道路や高速道路等の制限速度が異なる道路の種別に応じて、異なる特性をそれぞれ有している変換情報を切り替えることができるので、道路の種別に適した「速度情報」(規格化速度)を求めることができる。
【0138】
また、道路リンクの道路の種別に応じて「速度−速度情報」変換情報を変更する以外に、速度情報変換部17b,18bそれぞれは、道路リンクの例えば混雑状況等を示す交通情報に応じて、「速度−速度情報」変換情報を変更して、「速度情報」(規格化速度)に変換してもよい。
つまり、同じ一般道路であっても、ある道路リンクの交通情報によれば、当該道路は空いていると判定された場合、図25に示している「速度−速度情報」変換情報59が用いられ、これとは反対に、ある道路リンクの交通情報によれば、当該道路は混雑していると判定された場合は、図4に示している「速度−速度情報」変換情報59が用いられる。
【0139】
なお、混雑状況等を示す交通情報は、例えば、仮として、図4に示している「速度−速度情報」変換情報19を用いて「速度情報」(規格化速度)を求め、その求めた値により混雑状況等を判断する。例えば、「速度情報」(規格化速度)が0.9以上である場合、混雑していると判断する。そして、判断した混雑状況に応じて、「速度−速度情報」変換情報19,59のいずれを採用するか決定する。例えば、混雑していると判断された場合には、「速度−速度情報」変換情報19を採用するように決定する。そして、決定された変換情報により、再び「速度情報」(規格化速度)を求め、この「速度情報」が、推定システム11や学習システム12によって用いられる。
【0140】
[2.5.7 学習システムにおける学習用データの蓄積]
前記のとおり、推定対象道路リンクになり得る道路リンクにおける実測値に基づく速度情報と、当該推定対象道路リンクの交通情報を推定するために用いられる他の道路リンクの速度情報との組み合わせが学習用データとして、学習データベース14に蓄積され、実測値に基づく速度情報が得られると、学習用データが新たに蓄積される。
このように、新たな学習用データが学習データベース14に新たに追加されても、元の古くから蓄積されている学習用データも、学習データベース14に残存している。したがって、学習データベース14に蓄積されている学習用データすべてを使って、学習対象道路リンクの学習処理を行うと、元の古い学習用データの影響を受けて、学習精度向上が妨げられるおそれがある。
したがって、学習データベース14に蓄積された時期が古い学習用データは、廃棄し、新たに蓄積された学習用データを用いて学習を行うのが有効である。
【0141】
そこで、学習システム12は、古い学習データを廃棄する廃棄基準として、基準蓄積期間(例えば6ヶ月)を超えた学習用データを廃棄するという基準を採用することができる。この場合、学習データベース14には、過去6ヶ月の学習データが残され、蓄積期間が6ヶ月を経過した学習用データは、逐次廃棄されていく。
しかし、過去6ヶ月に、ある道路リンクで渋滞が発生しなかったとすると、学習データベース14には、当該道路リンクで渋滞が発生したときの学習用データは残らないことになる。この場合、1年のうちの特定の日に毎年渋滞が起こるものとしたときに、昨年の当該特定の日の学習用データが、学習データベース14に残らない。このため、当該特定日の渋滞を考慮した学習がなされず、今年の当該特定の日の速度情報の推定(補完)が適切に行えないおそれがある。
【0142】
したがって、古い学習用データを廃棄するとしても、単純に最古の学習用データから廃棄するのではなく、廃棄対象となる学習用データの選別を行うのが好ましい。
具体的には、図26に示すように、各学習用データを、学習用データ本体Bと、各学習用データが属するカテゴリーを示すカテゴリー情報Cとで構成しておき、各学習用データのカテゴリーを分類可能にしておく。なお、学習用データ本体Bは、学習対象道路リンクの速度情報(プローブ情報に基づく速度情報)と当該学習対象道路リンクの速度情報を推定するために用いられる他の道路リンクの速度情報との組み合わせからなる。
【0143】
図26では、カテゴリー情報Cとして、学習用データ本体Bにおける学習対象道路リンクの速度情報に基づいてカテゴリー分けした速度カテゴリー情報が付加されている。速度カテゴリーとしては、学習対象道路リンクの速度情報を、その大きさに応じて、「大」「中」「小」の3つに分類したものとすることができる。学習用データ本体Bに付加された速度カテゴリー情報Cは、当該学習用データ本体Bにおける学習対象道路リンクの速度情報が、「大」「中」「小」のいずれに属するかを示す情報となる。
【0144】
図27は、スナップショットによって、学習データベース14にカテゴリー情報C付きの学習用データが追加される場合の蓄積処理を示している。なお、この蓄積処理は、学習システム12が有している管理部55(図2参照)によって実行される。
【0145】
学習用データを学習データベース14に蓄積しようとする場合、まず、学習データベース14に既に蓄積されている学習用データの廃棄が必要であるか否かを、先に説明したような廃棄基準に従って判断する(ステップS51)。廃棄の必要がなければ、その学習用データを学習データベース14に蓄積する。
廃棄の必要がある場合、3つのカテゴリーのうち、学習データベース14に既に蓄積されている学習用データの数が最大であるカテゴリーを決定する(ステップS52)。
【0146】
そして、学習用データの数が最大であるとして決定されたカテゴリーの中の、最も古い学習用データを学習データベース14から削除する(ステップS53)。そして、蓄積対象の学習用データを、学習データベース14に蓄積する(ステップS54)。つまり、3つのカテゴリーのうち、蓄積されている学習用データの数が多いカテゴリーの学習用データを優先して破棄する。
【0147】
例えば、6ヶ月間で学習用データが300個蓄積でき、蓄積後6ヶ月経過した学習用データを廃棄するという廃棄基準を採用した場合に、図27の蓄積処理を行うものとする。そして、学習データベース14に蓄積済の学習用データ各カテゴリーに属する学習用データ個数が、大:10個、中:50個、小:240個であるとする。
この場合、301個目の学習用データが得られると、学習データベース14から学習用データを1個削除する必要があるが、図27の蓄積処理に従うと、学習用データ数が最大の「小」のカテゴリーが、削除対象カテゴリーとして選択され、[小]のカテゴリーの中で最も古い学習用データが削除される。
【0148】
図27の蓄積処理を繰り返すと、蓄積数の少ないカテゴリーの学習用データは、古いものであっても削除される機会が少なくなるため、削除されずに残りやすくなる。この結果、各カテゴリーの学習データ数がほぼ等しくなる。
そして、破棄されずに残っている学習用データを用いて、学習システム12は重みを最適化する。
このように、速度情報をカテゴリーに分けて蓄積し、学習用データの数が多いカテゴリーの学習用データを優先して破棄することで、学習処理の基礎となる学習用データの絞り込みを行うことができ、廃棄対象となる学習用データの選別行うことができる。
【0149】
なお、カテゴリー分けは、速度情報に限られるものではなく、任意のカテゴリー分けを採用できる。例えば、道路リンクの渋滞度でカテゴリー分けしてもよい。また、学習用データが得られた日(曜日、祝日等の特殊日)・時間帯、その日の天候等で、学習用データをカテゴリー分けしてもよい。
【0150】
[2.5.8 学習システムにおける学習用データのデータ量]
前記のとおり、学習システム12は、例えば、最小自乗法等によって学習用データから重みの最適値を算出する。このため、学習システム12が、重みを最適化する学習を効果的に行うためには、学習用データの数がある程度多いのが好ましいと考えられる。
しかし、重みの最適化は、道路リンク毎に実行されるべきであることから、全ての道路リンクそれぞれに関して学習用データの数を多くし過ぎると、学習データベース14に蓄積されるデータ量が膨大となる。
【0151】
ここで、学習システム12は、例えば最小自乗法等によって学習用データから重み(推定用パラメータ)の最適値を算出することから、重みが少ない道路リンクについての当該重みの最適化は、重みが多い道路リンクよりも、学習用データの数が少なくてもよい。
そこで、本実施形態の学習システム12は、重みの最適化のために蓄積させる学習用データの数を、学習対象道路リンク毎で設定する機能を有しており、この学習用データの数は、推定システム11による推定処理において用いられる重みの数に応じて設定される。
【0152】
すなわち、例えば、図9に示している重みデータベース15おいて、リンク番号15の道路リンクの速度情報を推定するためには、W0〜W11までの12個の重みが用いられる。これに対して、リンク番号21の道路リンクの速度情報を推定するためには、W0〜W5までの6個の重みを用いればよい。
そこで、学習システム12は、重み(推定用パラメータ)の最適化のために蓄積させる学習用データの数を、重みの数の整数倍(例えば5倍)の数を上限として設定する。例えば、リンク番号15の道路リンクの場合、重みの数「12」の5倍である「60」を上限として、学習用データ(スナップショット)を学習データベース14に蓄積させる。そして、リンク番号21の道路リンクの場合、関連道路リンクの数「6」の5倍である「30」を上限として、学習用データ(スナップショット)を、学習データベース14に蓄積させればよい。
【0153】
このように、重みの数が少ないのに合わせて、リンク番号21の道路リンクに関する学習用データの数が、リンク番号15の道路リンクに関する学習用データの数よりも少なくなるように、学習データベース14に学習用データを蓄積させればよい。すなわち、全ての道路リンクについて、一定数の学習用データを蓄積させる必要がない。この結果、学習データベース14に蓄積すべきデータ量が膨大となることを抑制することができる。
【0154】
なお、道路リンク間での重みの数の違いは、隣接する道路リンクが関連道路リンクとして設定されており、道路リンク毎で関連道路リンクの数が異なることから生じる。つまり、関連道路リンクの数と、重みの数とは対応しており(前記のとおり、重みの数は「関連道路リンクの数+1」)、学習対象道路リンクに関連する関連道路リンクの数が多くなると、重みの数も多くなるためである。
また、学習用データの数を、推定システム11による推定処理において用いられる重みの数に応じて設定するとして説明したが、関連道路リンクの数と、重みの数とは対応していることから、学習用データの数を、推定システム11による推定処理において速度情報が用いられる他の道路リンク(関連道路リンク)の数に応じて設定してもよい。
【0155】
[2.5.9 学習システムによる学習サイクル]
学習システム12は、学習用データが取得される毎に重みの最適化を行うように、学習サイクルを設定してもよいが、本実施形態では、学習システム12は、最適化の処理を行う頻度を変更する機能を有しており、学習データベース14に蓄積されている道路リンク毎の学習用データの数に応じて、最適化の処理を行う頻度を設定する。
つまり、学習システム12は、例えば、最小自乗法等によって学習用データから重みの最適値を算出することから、学習用データの数が多い道路リンクに関しては、学習用データの数が少ない場合に比較して、学習が進んでいると考えられる。
【0156】
そこで、学習システム12は、学習データベース14に蓄積されている道路リンク毎の学習用データの数が少ない場合、最適化の処理を行う頻度を高める。図28は、学習サイクルを設定するための処理を説明するフロー図である。
図15では、リンク番号20の学習対象道路リンクに関して、学習用データの数は「3」である。そこで、学習システム12は、各道路リンクの学習用データの数を取得する(ステップS71)。
【0157】
そして、学習用データが少ない道路リンクについては、例えば、学習用データが学習データベース14に蓄積される毎に、最適化の処理を行わせる。つまり、学習システム12は、ステップS71で求めた学習用データの数と、予め設定されている閾値とを比較し、学習用データの数が閾値未満である場合(ステップS72のYesの場合)、最適化の処理を行う頻度を高める(ステップS73)。例えば、学習用データが学習データベース14に蓄積される毎に、最適化の処理を行わせる。
【0158】
ステップS71で求めた学習用データの数と、予め設定されている閾値とを比較し、学習用データの数が閾値以上である場合(ステップS72のNoの場合)、最適化の処理を行う頻度を低くする(ステップS74)。すなわち、学習データベース14に蓄積されている道路リンク毎の学習用データの数が多い場合、学習システム12は、最適化の処理を行う頻度を、学習用データの数が少ない場合よりも、低くするように変更する。
これは、学習用データが多い道路リンクでは、十分に学習がされて高い学習精度に達していると考えられるため、学習用データが学習データベース14に蓄積されても、その都度、最適化の処理を行わないで、例えば、1日に1回や、1週間に1回という低頻度で、最適化の処理を行わせる。
【0159】
このように、最適化の処理を行う頻度を変更することにより、学習システム12による学習処理の負荷を低減することができる。つまり、学習システム12による重みを最適化する処理には時間を要することから、蓄積されている学習用データの数が多くなれば、当該最適化の処理を行う頻度を低くすることにより、学習システム12の負荷を低減することができる。
【0160】
なお、図28では、学習データベース14に蓄積されている道路リンク毎の学習用データの数に応じて、最適化の処理を行う頻度を変更する場合を説明したが、速度情報の推定結果の精度に応じて、最適化の処理を行う頻度を変更してもよい。
【0161】
つまり、図29に示しているように、ある道路リンクに関して、実測値に基づく速度情報が得られると(ステップS81)、他の道路リンク(関連道路リンク)の速度情報と重みを用いて、当該ある道路リンクの速度情報を推定することができる(ステップS82)。そして、その推定値と実測値との差を求め、この差が予め設定されている閾値以下であれば、速度情報の推定結果の精度は高いと判断され(ステップS83のYes)、1日に1回や、1週間に1回という低頻度で、最適化の処理を行わせる(ステップS84)。
これに対して、推定値と実測値との差が、予め設定されている閾値を超えていれば、速度情報の推定結果の精度は低いと判断され(ステップS83のNo)、例えば、学習用データが学習データベース14に蓄積される毎に、最適化の処理を行わせるように、頻度を高くする(ステップS85)。
【0162】
なお、前記説明では、推定値と実測値との差(誤差)を、速度情報の推定結果の精度としたが、これ以外として、実測値に基づく速度情報が取得できていなくても(図29のステップS81を省略して)、速度情報の推定結果の精度を、推定値のばらつき、つまり推定値の標準偏差から判断してもよい。つまり、測定値のばらつきが、予め設定された閾値よりも大きいと、信頼度は低く、推定結果の精度が低い(ステップS83のNo)と判定される。この場合、最適化の処理の頻度が高く設定される(ステップS85)。
【0163】
このように速度情報の推定結果の精度に応じて、最適化の処理の頻度を変更する場合、推定システム11による速度情報の推定結果の精度が好ましくない場合には、最適化の処理を行う頻度を増やし、精度を高めることが可能となる。一方、推定システム11による推定情報の推定結果の精度が好ましい場合には、最適化の処理を行う頻度を減らすことができ、学習システム12の負荷を低減することができる。
【0164】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【0165】
また、推定対象道路リンクの速度情報を推定するために用いられる他の道路リンク(関連道路リンク)は、推定対象道路リンクに接続されているものに限らず、推定対象道路リンクとは離れているが、速度情報の時間的変化の仕方が似ている道路リンク(例えば、推定対象道路リンクと並行する道路リンク)であってもよい。
また、本実施形態では、推定対象の情報として規格化された速度情報を用いたが、速度に関する情報としては、規格化された速度情報を用いずに、リンク旅行速度そのものを利用してもよい。
【0166】
さらに、本実施形態の交通情報推定装置1の推定システム11が推定の対象とする交通情報は、速度情報に限らず、これに加えて/代えて、渋滞情報など他の交通情報とすることもできる。この場合、渋滞度は、上記速度情報の1を混雑、0を順調の2値に割り当てることで算出できる。また、渋滞度を推定対象の交通情報として扱う場合、ニューラルネットワークでは、2値のいずれかを決定するための閾値も推定用パラメータとして必要となる。この場合、閾値も学習部による学習対象となる。
【符号の説明】
【0167】
1:交通情報推定装置、 11:推定システム(推定部)、 12:学習システム(学習部)、 13:推定データベース、 17b:速度情報変換部(変換部)、 18b:速度情報変換部(変換部)、 19,59:変換情報
【技術分野】
【0001】
本発明は、交通情報を推定するための交通情報推定装置、交通情報推定のためのコンピュータプログラム、及び交通情報推定方法に関するものである。
【背景技術】
【0002】
道路の交通情報をドライバーに提供する技術として、財団法人道路交通情報通信システムセンターによるVICS(Vehicle Information and Communication System:なお、「VICS」は上記財団法人の登録商標)が広く知られている。
このVICSは、各種の路側センサ(車両感知器やループコイル等)から収集した車両台数や車両速度等よりなる定点観測情報に基づいて、各路線での渋滞やリンク旅行時間を含む交通情報を集計し、その交通情報を、ビーコンによる狭域通信やFM放送等の広域通信によってドライバーに提供するものである。
【0003】
また、道路の交通情報をドライバーに提供する他の技術として、プローブカーを利用した交通情報推定システム(以下、プローブシステムという。)も知られている。
このプローブシステムは、例えば特許文献1および2に示すように、実際に道路を走行する車両(プローブ車両)を移動体センサとして利用するもので、現時点の車両位置や時刻等のプローブ情報を無線通信によって各プローブ車両から収集し、道路の交通情報を生成するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−151496号公報
【特許文献2】特開2005−4467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記VICS情報は、路側センサが設置された主要幹線道路等の一部の道路に関してしか得られない。
一方、プローブシステムでは、実際に道路を走行する車両(プローブ車両)を移動体センサとして利用するため、路側センサが設置されていない道路に関しても、交通情報を取得することが可能となる。
【0006】
しかし、現状では、プローブカーの台数は、非常に少なく、VICS及びプローブシステムのいずれからもデータが得られていない道路リンクについては、交通情報を得ることができない。
【0007】
そこで、(VICS及び)プローブシステムからデータが得られていない道路リンクについては、別の道路リンクの交通情報に基づいて、交通情報を推定することが考えられる。例えば、ある道路リンクの交通情報は、当該道路リンクに接続している道路リンク等のような関連のある他の道路リンクにおける交通情報との相関が認められる。このような相関関係を利用すれば、他の道路リンクの交通情報を用いて、推定対象となる道路リンクの交通情報を補完することができる。
【0008】
しかし、上記のような推定を行おうとすると、他の各道路リンクの交通情報それぞれを、どの程度、推定対象となる道路リンクの交通情報として反映させるか等を決める推定用パラメータを適切に設定することが必要となる。
推定用パラメータを適切に設定するには、道路リンクの交通情報同士の相関を、実際に測定・調査して同定することが考えられるが、膨大な数の道路リンク同士の組み合わせについて、そのような相関を人為的な手段により適切に求めることは現実的には不可能である。
【0009】
そこで、本発明は、推定対象道路リンクの交通情報を、推定用パラメータを用いて適切に推定できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
(1)本発明は、他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定装置であって、他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定部と、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習部とを備えたことを特徴とする。
【0011】
上記本発明によれば、交通情報を取得できなかった道路リンクについては、交通情報の推定が行われる。実測値に基づく交通情報が取得できた道路リンクについては、当該実測値に基づく交通情報と、当該交通情報を推定するために用いられる他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて推定用パラメータを最適化するため、交通情報が取得されていくにしたがって推定用パラメータを適切な値に更新することが可能であり、推定用パラメータを人為的に設定しなくても、適切な推定用パラメータが得られる。
【0012】
前記交通情報推定装置において、実測値に基づく交通情報がある道路リンクについて取得されたとする。この道路リンクに対応する道路は複数の車線を有しており、例えば、右側の車線は、車両がその後もほぼ同じ速度で走行する本線である場合、取得できた実測値に基づく交通情報は比較的速い走行速度を示す情報となるが、左側の車線は、分岐した側道へと続く車線でありしかも車両が停滞している場合、取得できた実測値に基づく交通情報は比較的遅い走行速度を示す情報となる。
このように、ある道路リンクの交通情報が実測値に基づいて得られたとしても、二種類の交通情報が取得される可能性があり、このような交通情報を用いて、当該ある道路リンクに関連する推定対象道路リンクの交通情報を推定しても、また、推定用パラメータを最適化する処理を行っても、正確なものとならないおそれがある。
【0013】
(2)そこで、前記学習部は、前記推定対象道路リンクになり得る道路リンクよりも後で分岐して存在する複数の枝道路リンク別に分類された前記学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化し、前記推定部は、前記枝道路リンク別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定する構成とすればよい。
この交通情報推定装置によれば、前記のように、道路リンクがその先で分岐していて、同じ道路リンクから複数種類の交通情報が取得される可能性があっても、前記学習部が、枝道路リンク別に推定用パラメータを最適化し、前記推定部は、枝道路リンク別に最適化された前記推定用パラメータを用いるので、推定対象道路リンクの交通情報を正確に推定することができる。
【0014】
(3)そして、前記(2)の場合において、前記学習部は、前記学習用データを、前記複数の枝道路リンク別に分類して蓄積する構成とすればよい。
つまり、前記学習部は、前記学習用データを、前記推定対象道路リンクになり得る道路リンクよりも後で分岐して存在する複数の枝道路リンク別に分類して蓄積し、蓄積された前記枝道路リンク別の前記学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化する構成となる。ただし、交通情報(またはその付属情報)から推定用パラメータの算出時に前記学習用データを分類可能であるならば、条件別に分類して蓄積せずとも、一つにまとめて蓄積しておいてもよい。
【0015】
(4)前記学習部は、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類された前記学習用データを用いて、当該条件別に推定用パラメータを最適化し、前記推定部は、前記条件別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定するのが好ましい。
同じ道路リンク(同じ道路)であっても、暦、時間帯、及び、天候が異なることによって、異なる傾向の実測値に基づく交通情報が取得される場合があり、このような交通情報に基づいて推定対象道路リンクの交通情報を推定しても、また、推定用パラメータを最適化しても、正確なものとならないおそれがあるが、前記(4)の交通情報推定装置によれば、前記学習部が、暦、時間帯、及び、天候の内の少なくとも一つの条件別に推定用パラメータを最適化し、前記推定部は、前記条件別別に最適化された前記推定用パラメータを用いるので、推定対象道路リンクの交通情報を正確に推定することができる。
【0016】
(5)そして、前記(4)の場合において、前記学習部は、前記学習用データを、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類して蓄積する構成とすればよい。
つまり、前記学習部は、前記学習用データを、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類して蓄積し、蓄積された前記条件別の前記学習用データを用いて、当該条件別に推定用パラメータを最適化する構成となる。ただし、交通情報(またはその付属情報)から推定用パラメータの算出時に前記学習用データを分類可能であるならば、条件別に分類して蓄積せずとも、一つにまとめて蓄積しておいてもよい。
【0017】
前記(1)のとおり、学習部は、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる他の道路リンクの交通情報との組み合わせを学習用データとして蓄積することから、実測値に基づく交通情報が得られると、学習用データが新たに蓄積されるように構成することができる。
このように、学習用データが新たに学習データベースに追加されても、元の古くから蓄積されている学習用データも、学習データベースに残存している。したがって、学習データベースに蓄積されている学習用データすべてを使って、学習対象道路リンクの学習処理を行うと、元の古い学習用データの影響を受けて、学習精度向上が妨げられるおそれがある。
したがって、学習データベースに蓄積された時期が古い学習用データは、廃棄し、新たに蓄積された学習用データを用いて学習を行うのが有効である。この場合、蓄積された時期が最も古い学習用データから、単純に廃棄してもよいが、廃棄対象となる学習用データの選別行うのが好ましい場合がある。
【0018】
(6)そこで、前記学習部は、学習用データを所定のカテゴリー毎に分類して蓄積し、前記カテゴリーのうち、蓄積されている学習用データの数が多いカテゴリーの学習用データを優先して破棄し、破棄されずに残っている学習用データを用いて、前記推定用パラメータを最適化するのが好ましい。この構成により、学習処理の基礎となる学習用データの絞り込みを行うことが可能となる。
【0019】
また、前記各交通情報推定装置において、例えば、ある道路リンクの交通情報によればリンク旅行速度が100km/hであることが検出され、他の道路リンクの交通情報によればリンク旅行速度が60km/hであることが検出されたとする。この場合、速度に差が存在するが、これは道路の制限速度の違いによるものにすぎず、道路の混雑度(交通量)としては、いずれにおいてもほぼ同様(空いている)と考えられる。
【0020】
(7)そこで、前記交通情報推定装置は、更に、前記他の道路リンクにおける車両の速度を示すリンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる速度情報に、所定の変換情報に基づいて変換する変換部を有し、前記変換部は、道路リンクの種別又は当該道路リンクの交通情報に応じて前記変換情報を変更して、前記速度情報に変換する構成とすればよい。
この場合、リンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる速度情報に変換するので、速度情報によって道路状況をより適切に表現させることが可能となる。
さらに、道路リンクの種別又は道路リンクの交通情報に応じて、前記変換情報を変更して、速度情報に変換するので、道路リンクの種別又は道路リンクの交通情報に適した速度情報に変換することができる。なお、前記道路リンクの種別には、例えば、高速道路、一般道路があり、前記道路リンクの交通情報としては、例えば、空いている情報、混雑している情報がある。
【0021】
(8)また、前記学習部は、推定用パラメータの最適化のために蓄積させる前記学習用データの数を、前記推定部による推定処理において交通情報が用いられる他の道路リンクの数、又は、前記推定部による推定処理において用いられる推定用パラメータの数に応じて設定するのが好ましい。
前記学習部が、推定用パラメータを最適化する学習を効果的に行うためには、学習用データの数がある程度多いのが好ましい場合もあるが、推定部による推定処理において交通情報が用いられる他の道路リンクの数、又は、推定用パラメータの数が少ない場合は、これに応じて、学習用データの数も少なくてもよく、前記学習部によれば、学習用データの数を減らすことで、情報の記憶量を減らすことが可能となる。
【0022】
(9)また、前記推定部は、前記推定対象道路リンクの交通情報を推定する際に用いる算出方式を、当該推定対象道路リンクの種別又は当該推定部による交通情報の推定結果の精度に応じて、変更して交通情報を推定するのが好ましい。
この場合、推定対象道路リンクに対応する道路と、その周辺道路との相関関係が単純である場合、例えば、推定対象道路リンクが高速道路である場合、交通情報を推定する際に用いる算出方式として線形モデルを採用すればよく、これにより処理時間を短くすることができる。これに対して、推定対象道路リンクに対応する道路と、その周辺道路との相関関係が複雑である場合、例えば、推定対象道路リンクが、リンク途中で車両の流入や流出が多い一般道路である場合、交通情報を推定する際に用いる算出方式として非線形モデルを採用することができる。
【0023】
(10)また、前記学習部は、蓄積されている道路リンク毎の前記学習用データの数に応じて、又は、前記推定部による交通情報の推定結果の精度に応じて、前記最適化の処理を行う頻度を変更するのが好ましい。
学習部による推定用パラメータを最適化する処理には時間を要するため、蓄積されている学習用データの数が多くなれば、学習用データを蓄積する毎に最適化の処理を行うのではなく、頻度を減らすことができる。また、推定部による交通情報の推定結果の精度が好ましくない場合には、最適化の処理を行う頻度を増やし(例えば、学習用データを蓄積する毎に行う)、推定部による交通情報の推定結果の精度が好ましい場合には、最適化の処理を行う頻度を減らすことができる。
【0024】
(11)また、前記推定部は、他の道路リンクの交通情報及び推定用パラメータを用いて推定した推定対象道路リンクの交通情報の信頼度を求め、前記推定部は、前記信頼度に基づいて、前記推定処理とは別の推定処理に変更して、推定対象道路リンクの交通情報を推定するのが好ましい。
この場合、他の道路リンクの交通情報及び推定用パラメータを用いて推定した交通情報の信頼度が低い場合、別の推定処理に変更して交通情報を推定することが可能となる。なお、別の推定処理としては、例えば、統計情報を用いて行う処理がある。
【0025】
(12)また、前記推定部は、他の道路リンクの交通情報及び推定用パラメータを用いて推定対象道路リンクの交通情報を推定する第一推定処理機能と、過去に取得した道路リンクの交通情報を統計して得た統計情報を用いて、推定対象道路リンクの交通情報を推定する第二推定処理機能とを有し、前記推定部は、道路リンクにおける実測値に基づく交通情報が得られると、当該実測値に基づく交通情報と、前記第一推定処理機能及び前記第二推定処理機能それぞれによって推定された交通情報との誤差を求め、当該誤差の比較に基づいて、前記道路リンクにおいて、当該第一推定処理機能と当該第二推定処理機能との内のいずれを用いるか決定するのが好ましい。
この場合、道路リンクにおける実測値に基づく交通情報が得られると、第一推定処理機能と第二推定処理機能との内の、当該実測値に基づく交通情報に対して誤差が小さくなる方で、当該道路リンクにおいて、推定対象道路リンクの交通情報を推定させることが可能となる。
【0026】
(13)また本発明は、コンピュータを、上記(1)〜(12)のいずれか1項に記載の交通情報推定装置として機能させるためのコンピュータプログラムである。
【0027】
(14)また本発明は、他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定方法であって、他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定ステップと、推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習ステップとを備えたことを特徴とする交通情報推定方法。
【発明の効果】
【0028】
本発明によれば、交通情報が取得されていくにしたがって推定用パラメータを適切な値に更新することが可能であり、推定用パラメータを人為的に設定しなくても、適切な推定用パラメータが得られるので、この推定用パラメータ及び他の道路リンクの交通情報を用いて、推定対象道路リンクの交通情報を適切に推定することが可能となる。
【図面の簡単な説明】
【0029】
【図1】交通情報システムの全体構成図である。
【図2】交通情報推定装置の構成図である。
【図3】入力情報処理部の構成図である。
【図4】変換情報を示す図である。
【図5】交通情報推定処理手順を示すフローチャートである。
【図6】ニューラルネットワークの構成図である。
【図7】道路リンクの例を示す図である。
【図8】推定データベースの初期状態を示す図である。
【図9】重みデータベースの初期状態を示す図である。
【図10】入力情報として取得したVICS情報及びプローブ情報を示す図である。
【図11】1回目の更新後の推定データベースを示す図である。
【図12】2回目の更新後の推定データベースを示す図である。
【図13】3回目の更新後の推定データベースを示す図である。
【図14】スナップショットとして抽出される部分を示す図である。
【図15】学習データベースを示す図である。
【図16】学習処理を示すフローチャートである。
【図17】二車線からなる道路の説明図である。
【図18】図11の一部を書き直した推定データベースの説明図である。
【図19】図9の一部を書き直した重みデータベースの説明図である。
【図20】学習データベース及び重みデータベースの説明図である。
【図21】推定システムによるモデルの変更を説明するフロー図である。
【図22】推定システムによるモデルの変更を説明するフロー図である。
【図23】推定システムによる選択処理を説明するフロー図である。
【図24】推定システムによる選択処理を説明するフロー図である。
【図25】図4とは別である変換情報を示す図である。
【図26】カテゴリー情報付き学習用データのデータ構造図である。
【図27】カテゴリー分けした場合の学習用データの学習データベースへの蓄積処理を示す図である。
【図28】学習サイクルを設定するための処理を説明するフロー図である。
【図29】学習サイクルを設定するための処理を説明するフロー図である。
【発明を実施するための形態】
【0030】
以下、本発明の好ましい実施形態について添付図面を参照しながら説明する。
[1.全体構成]
図1は、本発明の交通情報推定装置(中央装置)1を備えている交通情報システムの全体構成図である。この交通情報システムは、交通情報推定装置1のほか、車載装置2を搭載したプローブ車両3、車載装置2と無線通信する路側通信機4、及び路側センサ5等を含む。
【0031】
交通情報推定装置1は、例えば中央装置における様々な機能のうちの一機能を指しており、交通情報推定装置1は、VICS情報及びプローブ情報等の交通情報(観測情報)を取得し、車両に提供するための提供用の交通情報を生成する機能を有している。なお、交通情報推定装置1は、交通情報に基づいて、信号機制御や交通管制等の各種の交通用処理を行ってもよい。
【0032】
この交通情報推定装置(中央装置)1は、処理装置(CPU)及び記憶装置を有するコンピュータによって構成されており、記憶装置には、コンピュータを、交通情報推定装置1として機能させるためのコンピュータプログラムが記憶されている。このコンピュータプログラムは、前記処理装置によって実行され、前記処理装置が前記記憶装置等に対し入出力を行うことで、交通情報推定装置1としての機能を実現する。なお、以下に説明する交通情報推定装置(中央装置)1の機能は、特に断らない限り、前記コンピュータプログラムによって実現されるものである。
【0033】
前記車載装置2は、プローブ車両3の観測情報としてプローブ情報を生成し、路側通信機4に無線送信する。又は、車載装置2は、当該車載装置2と接続した携帯電話機50を介して、プローブ情報を送信してもよい。
プローブ情報は、プローブ車両の位置、当該位置の通過時刻及びプローブ車両の車両ID等を含む交通情報である。また、プローブ情報には、プローブ車両の通過速度等その他の情報を含めても良い。プローブ情報の位置及び時刻の情報に基づいて、道路リンク毎のリンク旅行時間が得られる。なお、プローブ車両の位置は、車載装置2が有するGPS受信機によって受信したGPS信号に基づいて算出される。
【0034】
前記路側通信機4は、車載装置2との間で無線通信によって情報の送受信を行うものである。具体的には、路側通信機4は、車載装置2が送信した観測情報としてのプローブ情報を受信し、交通情報推定装置(中央装置)1に転送する。また、路側通信機4は、交通情報推定装置(中央装置)1から、車両への提供用の交通情報を取得し、その交通情報を、車載装置2に送信することができる。なお、路側通信機4と交通情報推定装置1との間は、通信回線によって接続されている。
なお、前記のとおり、プローブ情報は携帯電話機50を介して送信してもよく、この場合、車載装置2によってプローブ情報が生成されると、当該プローブ情報は、携帯電話機50へ送られ、携帯電話機50が基地局49へプローブ情報を送信する。そして、基地局49は、プローブ情報を交通情報推定装置(中央装置)1に転送する。また、携帯電話機50は、交通情報推定装置(中央装置)1から基地局51を介して、車両への提供用の交通情報を取得し、その交通情報を、車載装置2に送ることができる。
【0035】
前記路側センサ5は、観測情報としての交通情報を検出するためのものであり、例えば、直下を通行する車両を超音波感知する車両感知器や、インダクタンス変化で車両を感知するループコイル、或いは、カメラの映像を画像処理して交通量や車両速度を計測する画像感知器よりなり、交差点等に流入する車両台数や車両速度を計測する目的で、高速道路や主要な幹線道路等に設置されている。
【0036】
路側センサ5によって検出された観測情報は、通信回線を介して、VICSセンタサーバ6に送信され、このVICSセンタサーバ6では、路側センサ5の観測情報に基づいて、VICS情報を生成する。このVICS情報は、通信回線を介して、交通情報推定装置1に送信される。
【0037】
前記VICS情報は、各道路リンクでの渋滞やリンク旅行時間を含む交通情報である。VICS情報は、路側センサ5から5分ごとに観測情報を取得して、更新されるため、時間的に高密度な情報が得られる。しかし、路側センサ5はすべての道路に設置されているわけではなく(主要道路でも20%以下)、エリアカバー率が低い。
一方、前記プローブ情報は、道路を走行するプローブ車両3から取得するため、エリアカバー率を高くすることが可能である。ただし、プローブ車両3となるための車載装置2の普及率がまだ低いため、時間的に低密度のデータしか得られない。
【0038】
つまり、所定エリア内の道路に、道路リンクを設定した場合、VICS情報が得られる道路リンクについては、VICS情報の更新単位時間ごとに常に交通情報(VICS情報)が得られる。一方、VICS情報が得られない道路リンクについては、VICS情報の更新単位時間毎にみると、プローブ情報が交通情報として得られる道路リンクがある一方、プローブ情報も得られない道路リンクが混在することになる。
【0039】
[2.交通情報推定装置の詳細]
[2.1 推定装置の全体構成]
本実施形態に係る交通情報推定装置1は、VICS情報もプローブ情報も得られない道路リンクの交通情報を推定して、当該道路リンクの交通情報を補完することで、所定エリア内の全道路リンクの交通情報を取得する。つまり、本実施形態に係る交通情報推定装置1は、所定エリア内の全道路リンクを母集団とし、全道路リンクのうちの一部の道路リンクについて交通情報を取得すると、残りの道路リンクについての交通情報を推定する。
【0040】
このように、VICS情報もプローブ情報も得られない道路リンクの交通情報を補完することで、より精度が高い交通情報を車両(ナビゲーションシステム)に提供したり、精度良く交通管制を行ったりすることが可能となる。
なお、以下では、VICS情報もプローブ情報も得られず交通情報を推定して補完する必要がある道路リンクを、「推定対象道路リンク」という。
【0041】
図2に示すように、交通情報推定装置1は、推定対象道路リンクの交通情報を推定するための推定システム(推定部)11と、推定に用いられるパラメータ(推定用パラメータ)を学習するための学習システム12とを備えている。
【0042】
また、交通情報推定装置1は、推定システム11によって推定した交通情報等を蓄積するための推定データベース(交通情報データベース)13、推定データベース13におけるデータのうち、学習システム12における学習に用いるデータを蓄積する学習データベース14、推定用パラメータ(本実施形態では「重み」)を蓄積するための重みデータベース(推定パラメータデータベース)15と、を記憶装置上に備えている。
【0043】
[2.2 入力情報処理部]
本実施形態に係る交通情報推定装置1は、当該交通情報推定装置1が取得したVICS情報及びプローブ情報(以下、両情報を総称する場合、「入力情報」という)に対する処理を行う入力情報処理部16を備えている。
入力情報処理部16は、入力情報から、各リンクの「速度情報」を生成する処理を行うものであり、生成した「速度情報」は、推定データベース13に与えられ、推定データベース13の更新に用いられる。
【0044】
図3に示すように、入力情報処理部16は、取得したVICS情報から「速度情報」を生成するVICS情報処理部17と、取得したプローブ情報から、「速度情報」を生成するプローブ情報処理部18と、を備えている。
VICS情報処理部17は、VICS情報に基づいて得られるリンク旅行時間から、当該道路リンクのリンク旅行速度を算出するリンク旅行速度算出部17aと、リンク旅行速度を当該リンクの「速度情報」に変換する速度情報変換部17bとを備えている。
【0045】
VICS情報処理部17のリンク旅行速度算出部17aは、リンク旅行速度を算出しようとする道路リンクのリンク長を、当該道路リンクのリンク旅行時間で除することで、リンク旅行速度[km/h]を算出する。なお、対象エリア内の全道路リンクのリンク長は、予め、装置1の記憶装置に格納されている。
VICS情報処理部17の速度情報変換部17bは、リンク旅行速度算出部17aで求めたリンク旅行速度を、「速度情報」(規格化速度)という指標値(速度指標情報)に変換する。この変換は、速度情報変換部17bが、装置1に予め設定された「速度−速度情報」変換情報19を参照することで行われる。「速度−速度情報」変換情報19は、図4に示すように設定されたものであるが、詳細については後述する。
【0046】
プローブ情報処理部18のリンク旅行速度算出部18aは、プローブ情報に含まれる位置及び時刻に基づいて、道路リンクのリンク旅行速度を算出する。
プローブ情報処理部18の速度情報変換部18bは、「速度−速度情報」変換情報19を参照することにより、リンク旅行速度算出部18aで求めたリンク旅行速度を、「速度情報」(規格化速度)という指標値(速度指標情報)に変換する。その処理内容は、VICS情報処理部17の速度情報変換部17bと同様である。
【0047】
[2.3 速度情報について]
「速度情報」は、リンク旅行速度の大小に応じた値をとる指標値であり、本実施形態では、図4に示すように、速度情報は、0から1までの値をとり、リンク旅行速度が100[km/h]のときに「0」になり、リンク旅行速度が0[km/h]のときに「1」の値をとる。
図4の「速度情報」は、リンク旅行速度に単純に反比例するものではない。つまり、リンク旅行速度−速度情報の関係式は、リンク旅行速度の複数の速度領域によって異なるものが用いられている。
前記複数の速度領域とは、具体的には、リンク旅行速度が0[km/h]〜約10(より厳密には10.53)[km/h]の第1速度領域(ゼロ近傍速度領域)、リンク旅行速度が約10(より厳密には10.5)[km/h]〜約60(より厳密には57.9)[km/h]の第2速度領域、リンク旅行速度が約60(より厳密には57.9)[km/h]超の第3速度領域(自由走行速度領域)の3つの速度領域である。
【0048】
第1速度領域は、車両の速度が、0又はそれに近い値を示すゼロ近傍速度領域として設定されたものであり、道路が混雑しているときにこのような速度領域の値が検出される。第3速度領域は、一般道路の制限速度(60km/h)以上の速度領域として設定されたものであり、道路が比較的すいており、車両が自由走行状態となり得るときにこのような速度領域の値が検出される。なお、第2速度領域は、第1及び第3速度領域の中間領域として設定されたものである。
【0049】
図4の横軸(リンク旅行速度)の値をx、縦軸(速度情報)の値をyとすると、第1速度領域におけるリンク旅行速度−速度情報の関係式は、y=1−(x/1000)に設定され、第2速度領域におけるリンク旅行速度−速度情報の関係式は、y=1.2−(x/50)に設定され、第3速度領域におけるリンク旅行速度−速度情報の関係式は、y=0.1−(x/1000)に設定されている。
【0050】
このように、リンク旅行速度−速度情報の関係直線は、第3速度領域及び第2速度領域に着目すると、第3速度領域(傾き=1/1000)では、第2速度領域(傾き=1/50)よりも、負の傾きが小さくなっている。
つまり、車両が自由走行状態となり得る自由速度領域である第3領域においては、より低速の第2速度領域に比べて、リンク旅行速度(x)の変化に対する速度情報(y)の変化の割合(負の傾き)が小さくなっている。
【0051】
また、リンク旅行速度−速度情報の関係直線は、第1速度領域及び第2速度領域に着目すると、第1速度領域(傾き=1/1000)では、第2速度領域(傾き=1/50)よりも、傾きが小さくなっている。
つまり、車両の速度がゼロ近傍である第1領域においては、より高速の第2速度領域に比べて、リンク旅行速度(x)の変化に対する速度情報(y)の変化の割合(負の傾き)が小さくなっている。
【0052】
以上のように設定された変換情報19によれば、速度情報という指標に、単なる「速度」という要素以外に、道路が混雑していて渋滞気味であるか、それとも道路が空いており車両が順調に流れているのかという渋滞度(交通流の度合)の要素も、持たせることができる。
【0053】
例えば、制限速度が100km/の道路リンクにおいてはリンク旅行速度が100km/であり、制限速度の60km/の道路リンクにおいてはリンク旅行速度が60km/hである場合、速度差は、40km/hであるが、いずれの道路リンクも車両が順調に流れており、いずれも自由走行状態であると考えられる。
一方、2つの道路リンクにおいて、一方の道路リンクのリンク旅行速度が60km/hであり、他方の道路リンクのリンク旅行速度が20km/hである場合、速度差は、上記と同様に40km/hであるが、前者の道路リンクは車両が順調に流れているが、後者の道路リンクは混雑していると考えられる。
【0054】
このように、リンク旅行速度が自由走行速度領域に達すると、道路における車両の多さ(渋滞度)とリンク旅行速度の関連性が相対的に低くなり、道路の制限速度などの別の要因によってリンク速度が変化しやすくなる。
このため、例えば、関連する他の道路リンクの交通情報(リンク旅行速度)から、推定対象道路リンクの交通情報(リンク旅行速度)を推定しようとした場合を想定すると、他の道路リンクの第3速度領域(自由走行速度領域)におけるリンク旅行速度の違いが推定対象道路リンクのリンク旅行速度の推定値に与える影響は、より低速の第2速度領域におけるリンク流行速度の違いよりも、小さくなる。
【0055】
また、第1速度領域についても、第3速度領域と同様に、速度が0〜10[km/h]であるときには、いずれの速度においても道路はかなり混雑していると考えられ、第1速度領域におけるリンク旅行速度の違いは、高速の第2速度領域におけるリンク流行速度の違いよりも、意味が少ないものとなる。
本実施形態の速度情報は、第1及び第3速度領域の傾きを小さくすることで、推定対象道路リンクの交通情報を精度良く推定することができる。
また、第1及び第3速度領域の傾きを小さくした結果、第2速度領域の傾きが大きくなり、第2速度領域におけるリンク旅行速度の違いを、速度情報という指標においてはより強調することができる。
【0056】
[2.4 交通情報推定装置による処理内容]
[2.4.1 推定処理の概要]
図5は、交通情報推定装置1(の処理装置)による交通情報推定方法を示している。
まず、推定データベース(交通情報データベース)13及び重みデータベース15に初期値を設定しておく(ステップS1)。
【0057】
そして、交通情報推定装置1が、VICS情報やプローブ情報を取得すると、入力情報処理部16がVICS情報やプローブ情報から各道路リンクの速度情報を生成する(ステップS2)。ただし、ステップS2において速度情報が取得できる道路リンクは、対象エリア内の全道路リンクのうちの一部であり、ステップS2では速度情報が得られない道路リンクがある。
【0058】
続いて、ステップS2で得られた速度情報を、推定データベース13にセットし、推定データベースDB4を更新する(ステップS3)。そして、推定システム11は、ステップS3で更新された推定データベース13の内容に基づいて、速度情報が得られていない道路リンクについての速度情報を推定し、推定した速度情報を、推定データベース13にセットし、推定データベース13を更新する(ステップS4)。このステップS4により、対象エリア内の全道路リンクについての速度情報(実測値と推測値とが混在したもの)が得られる。
【0059】
ステップS4にて得られた全道路リンクについての速度情報は、装置外部に出力される(ステップS5)。具体的には、装置1のディスプレイに表示されるか、車載装置2への提供情報として出力される。
また、ステップS4で更新された推定データベース13の内容の一部は、学習データベース14にスナップショットとして蓄積され、学習システム12による学習用データとして用いられる(ステップS6)。
【0060】
以上のステップS2〜ステップS6の処理は、速度情報が生成される度に繰り返し実行される。入力情報処理部16は、VICS情報の更新周期(例えば5分)に合わせて、VICS情報及びプローブ情報を取得して、速度情報を生成するため、ステップS2〜ステップS6の処理は、VICS情報の更新周期(例えば5分)に合わせて繰り返し実行されることになる。
【0061】
[2.4.2 速度情報推定のためのモデル]
図6は、推定システム11が、推定対象道路リンクの速度情報を推定するためのニューラルネットワークを示している。図示のニューラルネットワークは、0〜1の値をとるN個の入力信号xi(i:1〜N)それぞれに、重みwiを乗じて、出力値yを生成する単純パーセプトロンとして構成されている。
ここで、入力信号xiは、推定対象道路リンク以外の他の道路リンク(本実施形態では、推定対象道路リンクに接続された道路リンク)の速度情報であり、出力値yは推定対象道路リンクの速度情報である。
【0062】
また、重みxiは、推定対象道路リンク以外の複数の道路リンクそれぞれの速度情報を、どの程度の割合で反映させるかという値であり、推定対象道路リンクとの相関の高い道路リンク(例えば、推定対象道路リンクと同じ道路を構成し、推定対象道路リンクに隣接する道路リンク)ほど大きな値に設定されるべきであり、相関が低い道路リンクほど小さな値に設定されるべきものである。
【0063】
ただし、図6のものでは、一般的な単純パーセプトロンとは異なり、入力信号xiに乗じられることなくノードに加算される独立パラメータw0が設けられている。この独立パラメータw0は、推定対象道路リンク以外の道路リンクにおける速度情報以外の要因が、推定対象道路リンクの速度情報に与える要因(例えば、道路リンク間での制限速度の差)を表現することができ、速度情報を精度良く推定することができる。また、推定用パラメータ(重み)の学習の際に、推定用パラメータを最適値に収束させやすくなって、学習処理を容易又は高速に行える。
【0064】
以上のように、推定システム11が、ある推定対象道路リンクの速度情報を求めるには、当該推定対象道路リンクとの相関が多少なりとも認められる他の道路リンクの速度情報と、当該他の道路リンクの速度情報をどの程度ほど推定対象道路リンクの速度情報に反映させるかを示す重みと、が得られればよい。前記他の道路リンクの速度情報は、推定データベース(交通情報データベース)13に蓄積されており、重みは重みデータベース15に蓄積されており、推定システム11は、両データベース13,15から必要な情報を取得する。
【0065】
上記のようなニューラルネットは、各道路リンクについて設けられることになるため、推定システム11は、複数の道路リンクそれぞれに関する速度情報を、他の道路リンクに関する速度情報及びその寄与度を示す推定用パラメータ(重み)を用いて推定可能に構成されていることになる。
【0066】
[2.4.3 推定処理の詳細]
ここでは、図7のように接続された道路リンクを想定する。図7において、Vxは、道路リンクの速度情報(0〜1の値)を示している。また、Vxにおける添え字xは、道路リンクのリンク番号を示しており、1〜24の値をとる。つまり、図7では、リンク番号1〜24までの24個の道路リンクが存在する。また、各リンクの矢印方向は、車両の進行方向を示す。
【0067】
図7において、実線の矢印で示す道路リンク(リンク番号x=1〜10)は、VICS情報が取得可能なリンクであり、例えば、高速道路や主要幹線道路に対応する道路リンクである。また、点線の矢印で示す道路リンク(リンク番号x=11〜24)は、VICS情報が取得できないリンクであり、主に、例えば、高速道路や主要幹線道路以外の一般道路である。点線の矢印で示す道路リンクは、速度情報の推定対象道路リンクとなる可能性がある。つまり、点線の矢印で示す道路リンクについては、プローブ情報が得られた場合には、推定対象道路リンクとはならず、プローブ情報が得られなかった場合には、推定対象道路リンクとなり、速度情報の推定処理が実行される。
なお、VICS情報が取得可能な道路リンクであっても、何らかの事情でVICS情報が取得できない場合には、推定対象道路リンクとして扱われる。
【0068】
以下、図7の道路リンクを前提とし、図5も再度参照しつつ、速度情報の推定手順について詳細に説明する。
まず、推定データベース13及び重みデータベース15には、装置管理者によって、初期値が入力される(ステップS1)。
【0069】
図8に示すように、推定データベース13は、「チェック」31、「速度情報」32、「関連道路リンク情報」33、「リンク長」34、「学習?」35のデータ項目を有しており、各道路リンク(リンク番号)についてそれぞれのデータ項目の値を保存可能なものである。
【0070】
前記データ項目のうち、「チェック」31は、各道路リンクの速度情報の更新の有無及び更新された順番を示す項目である。「速度情報」32は、各道路リンクの速度情報がセットされる項目である。
「関連道路リンク情報」33は、各道路リンクに相関のある道路リンク(関連道路リンク)を示しており、ここでは、それぞれの道路リンクに接続されている道路リンク(リンク番号)を示している。
【0071】
「関連道路リンク情報」33は、「逆」、「A順」、「A逆」、「B順」、「B逆」の5種類に分けられている。
「逆」は、任意の道路リンクと逆方向の道路リンクのリンク番号を示し、例えばリンク番号1の道路リンクについては、リンク番号8の道路リンクが「逆」の道路リンクとなる。
「A順」は、ある道路リンクの後方で順方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号12,7,15の道路リンクが「A順」の道路リンクとなる。
「A逆」は、ある道路リンクの後方で逆方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号11,15,13の道路リンクが「A逆」の道路リンクとなる。
【0072】
「B順」は、ある道路リンクの前方で順方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号4,9の道路リンクが「B順」の道路リンクとなる。
「B逆」は、ある道路リンクの前方で逆方向に接続している道路リンクであり、例えば、リンク番号1の道路リンクについては、リンク番号3,6の道路リンクが「B逆」の道路リンクとなる。
【0073】
また、前記データ項目のうち「リンク長」34は、各道路リンクのリンク長を示すものである。「学習?」35は、各道路リンクの速度情報等が学習部20(学習システム12)による学習のためのデータ(学習用データ)となるものであるか否かを示しており、ここでは0又は1の値をとる。「0」はその道路リンクの速度情報等が学習用データとはならないことを示しており、「1」はその道路リンクの速度情報等が学習用データとなることを示している。
【0074】
ステップS1の初期値入力は、装置1の運用開始時やリセット時に行われ、推定データベース11については、上記データ項目のうち、「速度情報」32、「関連道路リンク情報」33、「リンク長」34について初期値が設定される。「速度情報」32の初期値としては、例えば、全道路リンクについて0を設定すればよい。「関連道路リンク情報」33及び「リンク長」34の初期値については、対象エリアの道路構成に従って設定される。「関連道路リンク情報」33及び「リンク長」34の初期値は、VICS情報及びプローブ情報からなる交通情報(速度情報)を取得しても更新されることはない。
【0075】
一方、「速度情報」34の値は、VICS情報及びプローブ情報からなる交通情報(速度情報)を取得する度に、全道路リンクについて更新される(ステップS3,S4)。
また、「チェック」31については、交通情報(速度情報)を取得する度に(ステップS2)、0に初期化される。「学習?」35についても、交通情報(速度情報)を取得する度に(ステップS2)、各道路リンクの速度情報等を学習用データとすべきか否かに応じて0又は1に設定される。
【0076】
図9に示すように、重みデータベース15には、各道路リンクにおける速度情報の推定値を他の道路リンクの速度情報から求める際に用いる重みwiが、初期値として設定される。重みwiは、各道路リンクについて、「関連道路リンクの数+1」ほど設定される。図9において、w0は独立パラメータであり、w1以降は関連道路リンクの速度情報それぞれに乗じられる重みである。
【0077】
推定用パラメータである重みwiは、学習システム12による学習によって、より適切な値へと自動的に更新されるため、初期値としては、適当な値を設定してもよい。したがって、初期設定が容易である。
【0078】
さて、上記の初期化を行ったのち、図7に示す道路リンクに関し、ある時点において、図10のようなVICS情報及びプローブ情報(交通情報)が得られたものとする。図10では、リンク番号1〜10の道路リンクについてのVICS情報(リンク旅行時間)が得られ、リンク番号20の道路リンクについてのプローブ情報が得られている。他の道路リンクについてはVICS情報もプローブ情報も得られていない。なお、図10では、表記の容易化のため、リンク番号20の道路リンクについてのプローブ情報を、VICS情報と同様に「リンク旅行時間」で示した。
【0079】
また、図10の情報では、プローブ情報が存在する道路リンク(リンク番号20)については、学習対象となることを示す値「1」が設定されており、VICS情報が存在する道路リンク(リンク番号1〜10)については、学習対象ではないことを示す値「0」が設定されている。
【0080】
図10のような入力情報が取得された場合、この情報における「旅行時間」は、入力情報処理部16によって「速度情報」に変換され(ステップS2)、その速度情報によって、推定データベース13の対応する道路リンクの「速度情報」32が更新される(第1回目の更新;ステップS3)。更新された道路リンクについては、「チェック」31に、第1回目の更新で速度情報が更新されたことを示す「1」が設定される。また、図11の入力情報の「学習対象」が「1」である道路リンク(ここでは、リンク番号20の道路リンク)については、「学習?」35が「1」に設定される。
以上のようにして第1回目の更新(入力情報のセット)が行われた後の推定データベース13の内容を、図11に示す。
【0081】
続いて、速度情報が未更新の道路リンク(リンク番号11〜19,21〜24)についての速度情報の推定を行って、当該推定値により推定データベース13の更新を行う(ステップS4)。
具体的には、まず、「チェック」31項目に、前回の更新を示す「1」が設定されている道路リンク(リンク番号1〜10,20)の関連道路リンク(隣接道路リンク)のうち、今回の入力情報(図10)に基づく速度情報の更新が未だなされていない道路リンク(チェック=0)を抽出する。ここでは、リンク番号12,15,11,13,19,18,17,21,24,14,16の11個の道路リンクが抽出される(図12参照)。これら11個の道路リンクが、ここでの推定対象道路リンクとなる。
【0082】
そして、推定システム11は、11個の推定対象道路リンクそれぞれについての関連道路リンクを、推定データベース13から読み出すとともに、11個の推定対象道路リンクそれぞれについて設定された重み(推定用パラメータ)を、重みデータベース15から読み出し、これらを用いて、各推定対象道路リンクの速度情報の推定値を算出する。算出された、速度情報の推定値は、推定データベース13の「速度情報」にセットされ、速度情報についての第2回目の更新が行われる。なお、更新された道路リンクについては、「チェック」31に、第2回目の更新で速度情報が更新されたことを示す「2」が設定される。
【0083】
上記推定対象道路リンクのうち、例えば、リンク番号12,15,11,13の道路リンクの速度情報の推定値(V12,V15,V11,V13)を求めるための演算式は、下記のとおりである。
V12=w0+w1V11+w2V1+w3V5+w4V13+w5V8+w6V7+w7V15
V15=w0+w1V13+w2V20+w3V16+w4V17+w5V14+w6V1+w7V11
+w8V5+w9V8+w10V12+w11V5
V11=w0+w1V12+w2V8+w3V15+w4V7+w5V1+w6V11+w7V5
V13=w0+w1V15+w2V8+w3V12+w4V7+w5V1+w6V11+w7V5
+w8V14+w9V17+w10V16+w11V20
【0084】
そして、「チェック」31項目に、前回の更新を示す「2」が設定されている道路リンク(リンク番号11〜19,21,24)の関連道路リンク(隣接道路リンク)のうち、今回の入力情報(図10)に基づく速度情報の更新が未だなされていない道路リンク(チェック=0)を抽出する。ここでは、リンク番号22,23の2個の道路リンクが抽出される(図13参照)。これら2個の道路リンクが、次の推定対象道路リンクとなる。
【0085】
そして、推定システム11は、2個の推定対象道路リンクそれぞれについての関連道路リンクを、推定データベース13から読み出すとともに、2個の推定対象道路リンクそれぞれについて設定された重み(推定用パラメータ)を、重みデータベース15から読み出し、これらを用いて、各推定対象道路リンクの速度情報の推定値を算出する。算出された、速度情報の推定値は、推定データベース13の「速度情報」にセットされ、速度情報についての第3回目の更新が行われる。なお、更新された道路リンクについては、「チェック」31に、第3回目の更新で速度情報が更新されたことを示す「3」が設定される。
【0086】
上記のような処理は、全ての道路リンクについての速度情報が推定されるまで繰り返される(ステップS4)。ここでは、3回の更新により全ての速度情報が補完されたため、推定処理を終了する。
【0087】
すると、推定データベースの内容の出力が行われる(ステップS5)。
さらに、今回の入力情報(図10)に基づく、推定処理が終了した推定データベース13の各道路リンクのデータのうち、「学習?」35に「1」が設定されたリンク番号20の道路リンクのスナップショット(図14参照)を、学習データベース14に追加する。ここで、スナップショットとは、「学習?」35に「1」が設定された道路リンクの「速度情報」と、この「学習?」35に「1」が設定された道路リンクの速度情報を推定するために用いられる一又は複数の他の道路リンク(関連道路リンク)の速度情報と、の組み合わせを記憶したものである。ここで、「学習?」35に「1」が設定された道路リンクの速度情報は、プローブ情報から得られた値であるから実測値である。また、当該道路リンクの関連道路リンクの「速度情報」には、VICS情報から得た実測値と推測値とが混在している。
【0088】
スナップショットは、入力情報が取得されて、推定データベースの全道路リンクの更新(ステップS3,S4)が行われる度に発生し、学習用データとして蓄積される。このスナップショットは、プローブ情報を取得できた道路リンクについて発生する。
したがって、上記の例では、リンク番号20の道路リンクのみスナップショットが発生したが、推定データベースの全道路リンクの更新(ステップS3,S4)が何度も行われると、他の道路リンクについてもスナップショットが蓄積される。また、入力情報が繰り返し発生するほどの十分な時間が経過すると、一つの道路リンクについて複数のスナップショットが蓄積される。
【0089】
[2.4.4 学習処理の詳細]
図15は、複数の道路リンクについて、それぞれ複数のスナップショットが蓄積された学習データベース14の内容を示している。
このようにして多数のスナップショットが学習用データとして蓄積された学習データベース14に基づいて、学習システム12が、重みデータベース15に記憶されている重み(推定用パラメータ)の学習(最適化)を行って、重みデータベース15の内容を更新する。
【0090】
図16は、学習システム12による学習処理の手順を示している。まず、学習システム12は、誤差判定のための許容誤差、ニューラルネットワーク(図6)を構成する中間層の数、学習計数等の学習用のパラメータ設定を行う(ステップS11)。
学習システム12は、例えば図6に示すようなニューラルネットワークを最適化(学習)するニューロエンジンとして構成されている。つまり、学習システム12は、学習データベース14に蓄積されているスナップショットのうち、実測値である速度情報を教師信号とし、教師信号となる速度情報を持つ道路リンクの関連道路リンクについての速度情報から、この教師信号を出力するための適切なニューラルネットワークを再構築する。すなわち、学習システム12は、実測値である速度情報と、当該速度情報を持つ道路リンクの関連道路リンクについての速度情報とからなる学習用データから、重みの最適値を算出する。重みの最適値の算出は、例えば、最小自乗法等によって行える。
【0091】
重みの最適値の算出は、関連道路リンクについての速度情報から算出される速度情報が、教師信号に近づいて、教師信号との誤差が、設定された許容誤差未満になるまで行われる(ステップS13)。
重みが収束して学習処理が終了すると、得られた重みは、重みデータベース15に反映され、重みデータベース15が更新される。
【0092】
重みデータベース15が更新された後に、VICS情報及びプローブ情報からなる入力情報が発生すると、推定システム11による速度情報の推定は、新たな重みを用いて、より精度良く行われる。このように、本実施形態の交通情報推定装置1では、運用を続けることで、交通情報(速度情報)の推定精度が自然に向上する。
【0093】
[2.5 交通情報推定装置が更に有している機能]
[2.5.1 推定処理]
前記実施形態では、図10に示したように、リンク番号1〜10の道路リンクについてVICS情報が取得され、リンク番号20の道路リンクについてのプローブ情報が取得され、残りの道路リンクの速度情報は推定された。そして、リンク番号20の道路リンクの実測値に基づく速度情報が用いられて、学習処理が行われた場合を説明した。
ここで、リンク番号20の道路リンクに対応する道路は、複数の車線からなり、このリンク番号20の道路リンクは、図7に示しているように、その下流側で道路が分岐している場合について説明する。
【0094】
例えば、図17に示しているように、リンク番号20の道路リンクR20の道路が二車線L1,L2からなり、右側の車線L1は、先にある隣のリンク番号14の道路リンクR14でもほぼ同じ速度で継続して車両が走行する本線であり、左側の車線L2は、分岐した側道(リンク番号15)へと続く車線であり、しかもこの側道及びその下流側となる車線L2では、車両が渋滞しているとする。なお、このような道路リンクR20を含む道路としては、例えば、高速道路の降り口である。
【0095】
この場合、同じ道路R20であっても、右側の車線L1を走行したプローブ車両3から取得される速度情報(プローブ情報)V20−1は、比較的速い速度(例えば規格化速度で0.1)を示す値であるのに対し、車線L2を走行したプローブ車両3から取得される速度情報(プローブ情報)V20−2は、比較的遅い速度を示す値(例えば規格化速度で0.42)となることが考えられる。
このように、道路リンクR20の速度情報が実測値に基づいて得られたとしても、二種類の速度情報V20−1,V20−2が取得される可能性があり、このような速度情報を用いて、推定システム11が、当該道路リンクR20に関連する道路リンク(例えば、その先にある枝道路リンクR14,R15)の速度情報を推定しても、また、学習システム12が、最適化する処理をしても、正確なものとならないおそれがある。
【0096】
そこで、本実施形態の交通情報推定装置1(推定システム11)において、学習システム12は、複数の枝道路リンク別に分類された学習用データを用いて、当該枝道路リンク別に重みを最適化する処理を行うことができ、この重みの最適化の処理が終了すると、その処理によって得られた新たな重みの値によって、重みデータベースが更新される。
そして、推定システム11は、枝道路リンク別に最適化された(更新された)重みを用いて推定対象道路リンクの交通情報を推定する。なお、高速道路の降り口の他、分岐前の道路に複数の車線があり、それらが右折専用車線を含むことなどによって、各車線で交通情報が大きく異なる可能性がある道路についてこの構成を適用することが有効である。そのような一部の道路は予めシステムに登録することができる。以下、この構成について説明する。
【0097】
本実施形態では、図2に示しているように、学習システム12における学習用データ(スナップショット)を蓄積する学習データベース14、各道路リンクの速度情報等を蓄積する推定データベース13、及び、推定用パラメータ(重み)を蓄積するための重みデータベース15を備えているが、この学習データベース14に、学習用データを、所定の方式で分類して蓄積させる選別部51を備えている。また、選別部51は、重みデータベース15に、推定用パラメータ(重み)を、所定の方式で分類して蓄積させる機能も有している。
本実施形態(図15)では、選別部51は、リンク番号20の道路リンクR20の学習用データを、当該道路リンクR20よりも後で分岐して存在する二つの枝道路リンク(リンク番号20(→15)と、リンク番号20(→14))別に分類して、学習データベース14に蓄積させる場合を説明している。
【0098】
学習データベース14には、枝道路リンク(リンク番号14と15)別に分類されて学習用データが蓄積され、このようにして学習用データが蓄積されると、学習システム12は、前記枝道路リンク別に分類された学習用データを用いて、当該枝道路リンク別(リンク番号14と15)に重みを最適化する処理を行う。そして、枝道路リンク別に重みが最適化されると、新たな重みの値によって、重みデータベースが更新される(図19参照)。図19は、図9の一部を書き直した重みデータベース15の説明図である。図19では、リンク番号20の道路リンクR20に関して、枝道路リンク(リンク番号14と15)別に最適化された(更新された)重みが蓄積されている。
このように(図15及び図19参照)、同じ道路リンクR20に関して、学習用データ(速度情報)及び重みを、行き先別に分類して蓄積させている。
【0099】
なお、このように、プローブ車両3の行き先別に分類して各データベース14,15に情報を蓄積させるためには、当該プローブ車両3が道路リンクR20を通過した後の行き先を判別する必要があり、このために、推定システム11は、プローブ車両3の行き先を判別する判別部52(図2参照)を備えている。
ここで、プローブ車両3の車載装置2は、複数の連続した道路リンクのプローブ情報をまとめて送信する(例えば5分毎に路側通信機4に送信する)ように構成されており、また、このプローブ情報には、プローブ車両3のID、位置及び時刻に関する情報が含まれている。このため、判別部5は、このようなプローブ情報を取得することで、プローブ車両3の行き先(走行軌跡)を判別することができる。
【0100】
したがって、前記選別部51は、取得したプローブ情報から、各道路リンクの速度情報及び行き先を判別した情報を取得すれば、リンク番号20の実測値に基づく速度情報を、枝道路リンク(リンク番号14と15)別に分類して蓄積させることが可能となる。すなわち、あるプローブ車両3から取得されたリンク番号20の道路リンクにおける速度情報が、リンク番号15の道路リンクR15をその後に走行したものであれば、リンク番号20の速度情報V20−2として、0.42が蓄積される(図15の破線で囲んでいる部分)。
【0101】
具体的に説明すると、プローブ情報によれば、リンク番号20の道路リンクにおける実測値に基づく速度情報がリンク番号14の枝道路リンクへ走行したものであると判別されると、図15において、リンク番号20(→14)の道路リンクの「速度情報」のデータ項目に、リンク番号14の枝道路リンクR14に進行する場合の速度情報V20−1を蓄積させ、これに組み合わせて、このリンク番号20の道路リンクの速度情報を推定するために用いられる他の道路リンクの速度情報を、学習用データとして蓄積させる。
これに対して、プローブ情報によれば、リンク番号20の道路リンクにおける実測値に基づく速度情報がリンク番号15の枝道路リンクへ走行したものであると判別されると、リンク番号20(→15)の道路リンクの「速度情報」のデータ項目に、リンク番号15の枝道路リンクR15に進行する場合の速度情報V20−2を蓄積させ、これに組み合わせて、このリンク番号20の道路リンクの速度情報を推定するために用いられる他の道路リンクの速度情報を、学習用データとして蓄積させる。
【0102】
また、図19では、リンク番号14と15の道路リンクそれぞれの関連道路リンクとなるリンク番号20の道路リンクのための推定用パラメータ(重み)を、二つの枝道路リンク(リンク番号14と15)別に分類して、重みデータベース15に蓄積させている。
つまり、リンク番号14の枝道路リンクR14に関して、各重み(図例では重みw3)の項目に、リンク番号14の枝道路リンクに進行する場合の重みを蓄積させ、さらにこれとは区別して、リンク番号15の枝道路リンクに進行する場合の重みを蓄積させる。そして、リンク番号15の枝道路リンクR15に関して、各重み(図例では重みw2)の項目に、リンク番号14の枝道路リンクに進行する場合の重みを蓄積させ、さらにこれとは区別して、リンク番号15の枝道路リンクに進行する場合の重みを蓄積させる。
【0103】
推定システム11が、二つ枝道路リンク(リンク番号14と15)の内の一つの枝道路リンクを推定対象道路リンクとして速度情報を推定する場合について説明する。
二つの枝道路リンク(リンク番号14と15)別に、つまり、行き先別に分類されて重みデータベース15(図19)に蓄積されている重みから、前記一つの枝道路リンクに対応している重みを選び、選んだ重みを用いる。
【0104】
すなわち、例えば、リンク番号15の枝道路リンクR15の速度情報を推定する場合、前記のとおり、下記の演算式により枝道路リンクR15の速度情報の推定値を求めることができる。
V15=w0+w1V13+w2V20+w3V16+w4V17+w5V14+w6V1+w7V11
+w8V5+w9V8+w10V12+w11V5
この際、枝道路リンクR15の関連道路リンクであるリンク番号20の速度情報は、推定データベースから選ばれ、図19において、リンク番号20の道路リンクの速度情報に対応する重みw2として、20→15である0.7が選ばれる。
そして、前記実施形態と同様にして、上記の演算式により枝道路リンクR15の速度情報の推定値が算出される。
【0105】
前記説明では、枝道路リンクR15の関連道路リンクであるリンク番号20の速度情報は、推定データベース(例えば図11)から選ばれるとして説明した。しかし、このリンク番号20の速度情報が、推定システム11によって推定されたものである場合、つまり、推定システム11が、二つ枝道路リンク(リンク番号14と15)の手前にある道路リンク(リンク番号20)を推定対象道路リンクとして速度情報を推定している場合について説明する。
【0106】
推定システム11による推定処理は、下記の演算式(V20=・・・)が用いられるが、枝道路リンク(リンク番号14と15)別に分類されている重み(図19参照)それぞれが用いられて、枝道路リンク毎の速度情報が推定されている。つまり、二種類の速度情報が推定されている。
V20=w0+w1V17+w2V21+w3V24+w4V14+w5V15+w6V16+w7V13
このように、上記の演算式(V20=・・・)によりリンク番号20の道路リンクの速度情報を推定することができるが、この場合に用いられる重みw0からw7までのそれぞれ値は、リンク番号14の枝道路リンクへ向かう場合(図19のリンク番号20の上段→14)と、リンク番号15の枝道路リンクへ向かう場合(図19のリンク番号20の下段→15)との、二種類が区別されて用いられる。
この場合、図18に示しているように、リンク番号20→14へ向かう速度情報V20−1と、リンク番号20→15へ向かう速度情報V20−2とが推定される。速度情報V20−1、V20−2の一方を推定する場合において、その推定に他方の交通情報を用いるようにしてもよい。
【0107】
なお、前記のとおり、推定システム11が、分岐前のリンク番号20の道路リンクを推定対象道路リンクとして速度情報を推定し、これが推定データベースに蓄積されている場合において、例えば、リンク番号15の枝道路リンクR15の速度情報を推定するためには、上記のとおり、上記演算式(V15=・・・)により枝道路リンクR15の速度情報の推定値を求めることができるが、この際、リンク番号20→15へ向かう速度情報V20として、V20−2である0.42が選ばれる。
なお、このリンク番号15の枝道路リンクR15の速度情報を推定する場合では、速度情報V20としては、少なくともV20−2が用いられていればよく、V20−2の他に、V20−1を用いてもよい。この場合、V20−2の重みは高い値に設定されるが、V20−1の重みを小さく設定すればよい。
【0108】
この推定システム11によれば、道路リンクがその先で分岐していて、同じ道路リンクから複数種類の速度情報が取得される可能性があっても、適切な重みが選ばれるので、推定対象道路リンクの速度情報を正確に推定することができ、また、推定用パラメータの最適化を正しく行わせることができる。
【0109】
[2.5.2 推定処理]
また、前記選別部51(図2参照)は、他の機能として、学習データベース14に、道路リンクの速度情報を、暦、時間帯、及び、天候の内の少なくとも一つの条件を分類基準として分類して蓄積させる機能を有している。さらに、選別部51は、重みデータベース15に、推定用パラメータ(重み)を、暦、時間帯、及び、天候の内の少なくとも一つの条件を分類基準として分類して蓄積させる機能も有している。なお、図20では、学習データベース14及び重みデータベース15それぞれに、暦、時間帯、及び、天候すべてについて、それぞれ毎のデータベースが用意されている。
【0110】
そして、学習システム12は、前記歴等の条件別に分類された学習用データを用いて、当該条件別に推定用パラメータを最適化する処理を行うことができ、この重みの最適化の処理が終了すると、その処理によって得られた新たな重みの値によって、重みデータベースが更新される。
そして、推定システム11は、前記条件別に最適化された(更新された)重みを用いて推定対象道路リンクの交通情報を推定する。以下、この構成について説明する。
【0111】
選別部51は、例えば、歴を条件として分類するために、カレンダーの機能を有しており、学習用データ及び重みを曜日毎や祝日毎に分けて蓄積させる。つまり、曜日毎の学習データベース14、及び、曜日毎の重みデータベース15が設定されている。そこで、学習システム12は、曜日毎や祝日毎に分けて蓄積されている学習用データ毎に、学習処理を行う。そして、推定システム11による推定処理では、その処理を行う曜日に応じた重みデータベース15が用いられ、祝日には当該祝日用の重みデータベース15が用いられる。
【0112】
また、同様に、選別部51は、時計機能を有しており、学習用データ及び重みを時間帯毎に分けて蓄積させる。つまり、例えば朝、日中、夕方、夜間及び深夜それぞれの学習データベース14及び重みデータベース15が設定されている。そこで、学習システム12は、時間帯毎に分けて蓄積されている学習用データ毎に、学習処理を行う。そして、推定システム11による推定処理では、その処理を行う時間帯に応じた重みデータベース15が用いられる。
また、選別部51は、学習用データ及び重みを天候条件(晴れ、曇り、雨及び雪)毎に分けて蓄積させる。つまり、天候条件毎の学習データベース14及び重みデータベース15が設定されている。そこで、学習システム12は、天候条件毎に分けて蓄積されている学習用データ毎に、学習処理を行う。そして、選別部51は、例えばVICSセンター等の外部から天候情報を取得することができ、推定システム11による推定処理では、その処理を行う際の天候条件に応じた重みデータベース15が用いられる。
【0113】
このように、暦、時間帯、及び、天候を分類基準として分類されて、個別の学習データベース14及び個別の重みデータベース15が用意されている。
そして、学習用データは、学習データベース14に、前記歴等の各条件を分類基準として分類して蓄積され、学習システム12によって条件別に最適化を行うことで、条件毎に重みを更新することができる。このため、この条件毎の重みを用いて推定システム11が推定処理を行うことで、正確に速度情報が推定される。
そして、推定システム11は、推定対象道路リンクの速度情報を推定する際に、前記分類基準により分類されて重みデータベース15に蓄積されている重みから、当該推定の際に該当している条件に対応している重みを選び、選んだ重みを用いる。これにより、処理の時点の分類に応じた演算式が用いられて速度情報が推定されることとなる。
【0114】
以上より、同じ道路リンクであっても、暦、時間帯、及び、天候が異なることによって、異なる傾向の速度情報が実測値に基づいて取得されることがあっても、学習データベース14及び重みデータベース15が所定の分類基準により分類されており、処理の際に適合しているデータベースを用いることで、推定対象道路リンクの交通情報を正確に推定することができ、また、推定用パラメータの学習を正しく行わせることができる。
【0115】
なお、前記推定処理の説明では、枝道路リンク別に分類された学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化する場合、及び、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類された学習用データを用いて、当該条件別に推定用パラメータを最適化する場合を説明したが、例えば、道路リンクが複数車線からなる場合、車線別に分類された学習用データを用いて、当該車線別に推定用パラメータを最適化し、この車線別に最適化された重みを用いて推定対象道路リンクの交通情報を推定してもよい。
【0116】
[2.5.3 速度情報推定のためのモデルの選択]
前記実施形態では、推定システム11が速度情報を推定するためのニューラルネットワークとして、図6のような単層のパーセプトロンを用いる場合を説明したが、これに限られるものではなく、入力層、中間層、出力層を有する多層パーセプトロンであってもよい。そこで、推定システム11は、推定対象道路リンクの交通情報を推定する際に用いる数学モデル(算出方式)を、当該推定対象道路リンクの道路種別に応じて変更して、速度情報を推定する機能を有している。
【0117】
図21は、この推定システム11によるモデルの変更を説明するフロー図である。例えば、高速道路のように、ある推定対象道路リンクに対応する道路とその周辺道路との相関関係が単純である場合(ステップS21のYesの場合)、交通情報を推定する際に用いるモデルとして、図6のような単層のパーセプトロンのような線形モデルが採用される(ステップS22)。線形モデルを採用すれば、処理時間を短くすることができる。なお、道路リンクは、中央装置(交通情報推定装置)1側で設定されていることから、各道路リンクの道路の種別を、交通情報推定装置1は把握できる。
【0118】
これに対して、推定対象道路リンクに対応する道路とその周辺道路との相関関係が複雑である場合、例えば、推定対象道路リンクが、そのリンク途中で車両の流入や流出が多い一般道路である場合(ステップS21のNoの場合)、交通情報を推定する際に用いる算出方式として、多層パーセプトロンのような非線形モデルが採用される(ステップS23)。推定モデルを、多層パーセプトロンとして構成すると、推定対象道路リンクと他の道路との間で、速度情報が非線形関係を持つ場合であっても、推定対象道路リンクの速度情報を適切に求めることができる。
【0119】
図21の場合では、高速道路や一般道路等の道路種別に応じて数学モデルを変更し、速度情報を推定する場合を説明したが、推定システム11による速度情報の推定結果の精度に応じて、数学モデル(算出方式)を変更してもよい。図22は、この推定システム11によるモデルの変更を説明するフロー図である。
【0120】
推定システム11は、線形モデルを用いて各道路リンクの速度情報を推定する(ステップS25)と共に、その推定結果の誤差も求める(ステップS26)。この誤差は、ある道路リンクにおける実測値として取得された速度情報と、当該ある道路リンクにおける推定値として取得された速度情報との差に基づいて得られる。そして、この誤差が、予め設定されている閾値よりも大きい場合(ステップS27のYesの場合)、当該道路リンクにおいては、それ以後、線形モデルではなく、非線形モデルを採用して速度情報を推定するように設定される(ステップS28)。
【0121】
誤差が閾値以下である場合(ステップS27のNoの場合)、引き続いて、その道路リンクでは、線形モデルを採用して速度情報を推定するように設定される(ステップS29)。
この推定システム11によれば、原則、線形モデルを採用することで処理時間の短縮かを図るが、線形モデルでは推定精度が低い場合にのみ、非線形モデルを採用し、全体における推定精度を確保することができる。
【0122】
[2.5.4 速度情報の推定方式の選択]
前記実施形態の推定システム11では、VICS情報やプローブ情報が取得されない道路リンク(推定対象道路リンク)については、他の道路リンクの交通情報及び推定用パラメータ(重み)が用いられて、例えば図6に示したニューラルネットにより、その速度情報が推定される場合を説明した。
このニューラルネットによる数学モデルを採用することで、推定対象道路リンクの速度情報を精度良く推定することができ、しかも、この交通情報推定装置1は、前記学習システム12を備えているため、実測値に基づく速度情報が得られる毎に推定精度を更に高めることが可能となる。
【0123】
しかし、道路リンクの種別によっては、様々な要因が重なることで、ニューラルネットによる推定処理を行ったとしても、推定値にばらつきが生じることがある。このばらつきが大きいと、推定結果(推定値)の信頼度は低いと考えられる。
そこで、本実施形態の推定システム11は、推定値の信頼度に基づいて、ニューラルネットワークを用いた推定処理とは別の推定処理に変更して、推定対象道路リンクの交通情報を推定する機能を有している。このために、推定システム11は、ニューラルネットワークによる推定対象道路リンクの速度情報の推定処理についての信頼度を求める信頼度判定部53(図2参照)を有している。なお、本実施形態での信頼度は、ニューラルネットワークにより求めた推定値のばらつきにより判定される。つまり、推定値の標準偏差とその閾値とを比較することにより、信頼度が判定される。なお、信頼度は、推定値による速度情報と実測値による速度情報との誤差に基づいて、判定されてもよい。
【0124】
図23は、この推定システム11による選択処理を説明するフロー図である。各道路リンクについて、例えば図6に示したニューラルネットが設定されていることから、推定システム11は、各道路リンクにおける速度情報を、他の道路リンクに関する速度情報及び重み(推定用パラメータ)を用いて推定することができる(ステップS31)。そして、推定された道路リンクにおける速度情報は、推定データベース13に蓄積され、その後更新もされるが、過去に推定された速度情報についても、推定処理のためには用いないが、蓄積されている(ステップS32)。
【0125】
このようにして、ある道路リンクに関して、推定値に基づく速度情報が複数蓄積されると、前記信頼度判定部53は、これら複数の推定値に基づく速度情報についての標準偏差を算出する(ステップS33)。そして、信頼度判定部53によって、この標準偏差と予め設定されている閾値とが比較され、標準偏差が閾値を超えている場合(ステップS34のYesの場合)、信頼度判定部53により、前記のとおりニューラルネットワークを用いて求めた推定値の信頼度は低いと判定される。この判定がされると、前記ある道路リンクに関しては、それ以降、ニューラルネットワークを用いた推定処理とは別の推定処理に変更されて(ステップS35)推定システム11により推定対象道路リンクの交通情報が推定される。
【0126】
これに対して、前記標準偏差が閾値以下である場合(ステップS34のNoの場合)、信頼度判定部53により、ニューラルネットワークを用いた前記推定処理の信頼度は高いと判定される。この場合、前記ある道路リンクに関して、そのままニューラルネットワークによる推定処理が行われる(ステップS36)。
【0127】
なお、推定対象道路リンクの速度情報を推定する前記「別の推定方式」としては、図6に示したような数学モデルを用いて演算により速度情報を求める推定方式ではなく、例えば、過去に取得した他の道路リンクの交通情報(速度情報)を統計して得た統計情報を用いて、推定対象道路リンクの交通情報(速度情報)を推定する方式がある。このために、推定システム11は、各道路リンクに関して、プローブ情報等から過去に取得した道路リンクの交通情報(速度情報)を蓄積させる統計データベース(図示せず)を有している。
【0128】
この統計情報を用いて速度情報を推定する方式についてさらに説明する。この方式は、過去に取得され蓄積されている実測値についての交通情報を用いて、推定対象道路リンクの交通情報を推定する方式である。
つまり、各道路リンクについて、VICS情報やプローブ情報を取得することにより収集した実測値に基づく交通情報の平均値を、統計情報としてデータベースに蓄積させておく。なお、この交通情報の平均値は、日種(例えば曜日、祝日)、及び、時間帯(例えば15分幅)別に蓄積されている。
そして、交通情報の推定処理を行う場合、当該推定処理を行う日種(例えば曜日、祝日)、及び、時間帯(例えば15分幅)に対応している前記統計情報(前記交通情報の平均値)を、推定値として採用する方式である。なお、後述する第二推定処理機能も、この方式とすることができる。
【0129】
[2.5.5 速度情報の推定方式の選択]
交通情報推定装置1は、前記学習システム12を備えているため、実測値に基づく速度情報が取得されると、重みの最適値が求められ、この結果、この重みを用いて行われる推定システム11による速度情報の推定精度を高めることが可能となる。しかし、道路リンクの種別によっては、様々な要因が重なることで、ニューラルネットによる推定処理を行ったとしても、実測値と推定値との間の誤差が大きいままとなる場合もある。
【0130】
そこで、本実施形態の推定システム11は、推定対象道路リンクの速度情報を推定する機能として、第一推定処理機能と第二推定処理機能とを有している。第一推定処理機能は、上記のとおり説明した推定処理を行う機能であり、他の道路リンクの速度情報及び推定用パラメータ(重み)を用いたニューラルネットワーク(例えば図6参照)によって、推定対象道路リンクの速度情報を推定する。
一方、第二推定処理機能は、図6に示したような数学モデルを用いて演算により速度情報を求める推定方式ではなく、過去に取得した他の道路リンクの速度情報を統計して得た統計情報を用いて、推定対象道路リンクの速度情報を推定する機能である。なお、この第二推定処理機能のために、推定システム11は、各道路リンクに関して、プローブ情報等に基づいて過去に取得した道路リンクの速度情報を蓄積させる統計データベース(図示せず)を有している。
そして、推定システム11は、実測値に基づく速度情報と、第一推定処理機能及び第二推定処理機能それぞれによって推定された速度情報との誤差に基づいて、当該第一推定処理機能と当該第二推定処理機能との内のいずれを用いるか決定する機能を有している。
【0131】
図24は、この推定システム11による選択処理を説明するフロー図である。プローブ情報等により、ある道路リンクにおける実測値に基づく速度情報が得られたとする(ステップS41)。
なお、各道路リンクについて、例えば図6に示したニューラルネットが設定されていることから、第一推定処理機能によれば、前記ある道路リンクに関する速度情報が、他の道路リンクにおける速度情報及び重み(推定用パラメータ)が用いられて推定される(ステップS42−1)。
また、前記統計データベースには、各道路リンクについての過去に取得した道路リンクの速度情報が蓄積されているので、第二推定処理機能によれば、前記ある道路リンクに関する速度情報を推定することができる(ステップS42−2)。
【0132】
そして、前記ある道路リンクにおける実測値に基づく速度情報が得られていることから(ステップS41)、この実測値に基づく速度情報と、第一推定処理機能によって推定された速度情報との第一誤差を求め(ステップS43−1)、また、前記実測値に基づく速度情報と、第二推定処理機能によって推定された速度情報との第二の誤差とを求める(ステップS43−2)。
【0133】
そして、これら第一の誤差及び第二の誤差は、一定期間(例えば1週間)の間、複数回求められ、当該一定期間の平均値を求める。
推定システム11は、第一誤差(平均値)と第二誤差(平均値)とを比較し、第一誤差が第二誤差以下である場合(ステップS44のYesの場合)、前記ある道路リンクに関して、その後、実測値に基づく速度情報が得られない際、第一推定処理機能を採用して速度情報を推定する(ステップS45)。
第一誤差が第二誤差を超えている場合(ステップS44のNoの場合)、前記ある道路リンクに関して、その後、実測値に基づく速度情報が得られない際、第二推定処理機能を採用して速度情報を推定する(ステップS46)。
【0134】
このように、ある道路リンクについて実測値に基づく速度情報が得られることにより、当該ある道路リンクでは、第一推定処理機能を採用するか、第二推定処理機能を採用するかの判定が、一定期間毎に行われ、前記ある道路リンクで採用される機能をどちらとするかについて設定される。これにより、各道路リンクにおいて、他方と比較して誤差が小さくなる推定処理機能により、推定対象道路リンクの速度情報を推定することができる。
【0135】
[2.5.6 速度情報の選択]
図3及び図4で説明したように、速度情報変換部17b,18bは、「速度−速度情報」変換情報19に基づいて、道路リンクにおける車両の速度を示すリンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる「速度情報」(規格化速度)という指標値に変換している。
前記実施形態では、「速度−速度情報」変換情報19が、図4に示すように設定されたものであり、この第一の変換情報19は、例えば一般道路向けのために設定されたものである。
「速度−速度情報」変換情報として、図4に示している関係以外に、図25に示している「速度−速度情報」変換情報59も設定されており、これら変換情報19,59が入力情報処理部16に記憶されている。第二の変換情報59は、例えば高速道路向けのために設定されたものである。
【0136】
そして、本実施形態では、前記速度情報変換部17b,18bそれぞれは、道路リンクの道路種別に応じて「速度−速度情報」変換情報を変更して、リンク旅行速度を「速度情報」(規格化速度)に変換する機能を有している。
例えば、VICS情報やプローブ情報から取得されたリンク旅行速度が、一般道路を走行している車両から取得されたものである場合、当該リンク旅行速度は、図4に示している「速度−速度情報」変換情報19が用いられ「速度情報」(規格化速度)に変換される。なお、道路リンクは、中央装置(交通情報推定装置)1側で設定されていることから、各道路リンクの道路の種別を、入力情報処理部16は把握できる。
【0137】
これに対して、リンク旅行速度が、高速道路を走行している車両から取得されたものである場合、当該リンク旅行速度は、図25に示している「速度−速度情報」変換情報59が用いられ「速度情報」(規格化速度)に変換される。
このように、一般道路や高速道路等の制限速度が異なる道路の種別に応じて、異なる特性をそれぞれ有している変換情報を切り替えることができるので、道路の種別に適した「速度情報」(規格化速度)を求めることができる。
【0138】
また、道路リンクの道路の種別に応じて「速度−速度情報」変換情報を変更する以外に、速度情報変換部17b,18bそれぞれは、道路リンクの例えば混雑状況等を示す交通情報に応じて、「速度−速度情報」変換情報を変更して、「速度情報」(規格化速度)に変換してもよい。
つまり、同じ一般道路であっても、ある道路リンクの交通情報によれば、当該道路は空いていると判定された場合、図25に示している「速度−速度情報」変換情報59が用いられ、これとは反対に、ある道路リンクの交通情報によれば、当該道路は混雑していると判定された場合は、図4に示している「速度−速度情報」変換情報59が用いられる。
【0139】
なお、混雑状況等を示す交通情報は、例えば、仮として、図4に示している「速度−速度情報」変換情報19を用いて「速度情報」(規格化速度)を求め、その求めた値により混雑状況等を判断する。例えば、「速度情報」(規格化速度)が0.9以上である場合、混雑していると判断する。そして、判断した混雑状況に応じて、「速度−速度情報」変換情報19,59のいずれを採用するか決定する。例えば、混雑していると判断された場合には、「速度−速度情報」変換情報19を採用するように決定する。そして、決定された変換情報により、再び「速度情報」(規格化速度)を求め、この「速度情報」が、推定システム11や学習システム12によって用いられる。
【0140】
[2.5.7 学習システムにおける学習用データの蓄積]
前記のとおり、推定対象道路リンクになり得る道路リンクにおける実測値に基づく速度情報と、当該推定対象道路リンクの交通情報を推定するために用いられる他の道路リンクの速度情報との組み合わせが学習用データとして、学習データベース14に蓄積され、実測値に基づく速度情報が得られると、学習用データが新たに蓄積される。
このように、新たな学習用データが学習データベース14に新たに追加されても、元の古くから蓄積されている学習用データも、学習データベース14に残存している。したがって、学習データベース14に蓄積されている学習用データすべてを使って、学習対象道路リンクの学習処理を行うと、元の古い学習用データの影響を受けて、学習精度向上が妨げられるおそれがある。
したがって、学習データベース14に蓄積された時期が古い学習用データは、廃棄し、新たに蓄積された学習用データを用いて学習を行うのが有効である。
【0141】
そこで、学習システム12は、古い学習データを廃棄する廃棄基準として、基準蓄積期間(例えば6ヶ月)を超えた学習用データを廃棄するという基準を採用することができる。この場合、学習データベース14には、過去6ヶ月の学習データが残され、蓄積期間が6ヶ月を経過した学習用データは、逐次廃棄されていく。
しかし、過去6ヶ月に、ある道路リンクで渋滞が発生しなかったとすると、学習データベース14には、当該道路リンクで渋滞が発生したときの学習用データは残らないことになる。この場合、1年のうちの特定の日に毎年渋滞が起こるものとしたときに、昨年の当該特定の日の学習用データが、学習データベース14に残らない。このため、当該特定日の渋滞を考慮した学習がなされず、今年の当該特定の日の速度情報の推定(補完)が適切に行えないおそれがある。
【0142】
したがって、古い学習用データを廃棄するとしても、単純に最古の学習用データから廃棄するのではなく、廃棄対象となる学習用データの選別を行うのが好ましい。
具体的には、図26に示すように、各学習用データを、学習用データ本体Bと、各学習用データが属するカテゴリーを示すカテゴリー情報Cとで構成しておき、各学習用データのカテゴリーを分類可能にしておく。なお、学習用データ本体Bは、学習対象道路リンクの速度情報(プローブ情報に基づく速度情報)と当該学習対象道路リンクの速度情報を推定するために用いられる他の道路リンクの速度情報との組み合わせからなる。
【0143】
図26では、カテゴリー情報Cとして、学習用データ本体Bにおける学習対象道路リンクの速度情報に基づいてカテゴリー分けした速度カテゴリー情報が付加されている。速度カテゴリーとしては、学習対象道路リンクの速度情報を、その大きさに応じて、「大」「中」「小」の3つに分類したものとすることができる。学習用データ本体Bに付加された速度カテゴリー情報Cは、当該学習用データ本体Bにおける学習対象道路リンクの速度情報が、「大」「中」「小」のいずれに属するかを示す情報となる。
【0144】
図27は、スナップショットによって、学習データベース14にカテゴリー情報C付きの学習用データが追加される場合の蓄積処理を示している。なお、この蓄積処理は、学習システム12が有している管理部55(図2参照)によって実行される。
【0145】
学習用データを学習データベース14に蓄積しようとする場合、まず、学習データベース14に既に蓄積されている学習用データの廃棄が必要であるか否かを、先に説明したような廃棄基準に従って判断する(ステップS51)。廃棄の必要がなければ、その学習用データを学習データベース14に蓄積する。
廃棄の必要がある場合、3つのカテゴリーのうち、学習データベース14に既に蓄積されている学習用データの数が最大であるカテゴリーを決定する(ステップS52)。
【0146】
そして、学習用データの数が最大であるとして決定されたカテゴリーの中の、最も古い学習用データを学習データベース14から削除する(ステップS53)。そして、蓄積対象の学習用データを、学習データベース14に蓄積する(ステップS54)。つまり、3つのカテゴリーのうち、蓄積されている学習用データの数が多いカテゴリーの学習用データを優先して破棄する。
【0147】
例えば、6ヶ月間で学習用データが300個蓄積でき、蓄積後6ヶ月経過した学習用データを廃棄するという廃棄基準を採用した場合に、図27の蓄積処理を行うものとする。そして、学習データベース14に蓄積済の学習用データ各カテゴリーに属する学習用データ個数が、大:10個、中:50個、小:240個であるとする。
この場合、301個目の学習用データが得られると、学習データベース14から学習用データを1個削除する必要があるが、図27の蓄積処理に従うと、学習用データ数が最大の「小」のカテゴリーが、削除対象カテゴリーとして選択され、[小]のカテゴリーの中で最も古い学習用データが削除される。
【0148】
図27の蓄積処理を繰り返すと、蓄積数の少ないカテゴリーの学習用データは、古いものであっても削除される機会が少なくなるため、削除されずに残りやすくなる。この結果、各カテゴリーの学習データ数がほぼ等しくなる。
そして、破棄されずに残っている学習用データを用いて、学習システム12は重みを最適化する。
このように、速度情報をカテゴリーに分けて蓄積し、学習用データの数が多いカテゴリーの学習用データを優先して破棄することで、学習処理の基礎となる学習用データの絞り込みを行うことができ、廃棄対象となる学習用データの選別行うことができる。
【0149】
なお、カテゴリー分けは、速度情報に限られるものではなく、任意のカテゴリー分けを採用できる。例えば、道路リンクの渋滞度でカテゴリー分けしてもよい。また、学習用データが得られた日(曜日、祝日等の特殊日)・時間帯、その日の天候等で、学習用データをカテゴリー分けしてもよい。
【0150】
[2.5.8 学習システムにおける学習用データのデータ量]
前記のとおり、学習システム12は、例えば、最小自乗法等によって学習用データから重みの最適値を算出する。このため、学習システム12が、重みを最適化する学習を効果的に行うためには、学習用データの数がある程度多いのが好ましいと考えられる。
しかし、重みの最適化は、道路リンク毎に実行されるべきであることから、全ての道路リンクそれぞれに関して学習用データの数を多くし過ぎると、学習データベース14に蓄積されるデータ量が膨大となる。
【0151】
ここで、学習システム12は、例えば最小自乗法等によって学習用データから重み(推定用パラメータ)の最適値を算出することから、重みが少ない道路リンクについての当該重みの最適化は、重みが多い道路リンクよりも、学習用データの数が少なくてもよい。
そこで、本実施形態の学習システム12は、重みの最適化のために蓄積させる学習用データの数を、学習対象道路リンク毎で設定する機能を有しており、この学習用データの数は、推定システム11による推定処理において用いられる重みの数に応じて設定される。
【0152】
すなわち、例えば、図9に示している重みデータベース15おいて、リンク番号15の道路リンクの速度情報を推定するためには、W0〜W11までの12個の重みが用いられる。これに対して、リンク番号21の道路リンクの速度情報を推定するためには、W0〜W5までの6個の重みを用いればよい。
そこで、学習システム12は、重み(推定用パラメータ)の最適化のために蓄積させる学習用データの数を、重みの数の整数倍(例えば5倍)の数を上限として設定する。例えば、リンク番号15の道路リンクの場合、重みの数「12」の5倍である「60」を上限として、学習用データ(スナップショット)を学習データベース14に蓄積させる。そして、リンク番号21の道路リンクの場合、関連道路リンクの数「6」の5倍である「30」を上限として、学習用データ(スナップショット)を、学習データベース14に蓄積させればよい。
【0153】
このように、重みの数が少ないのに合わせて、リンク番号21の道路リンクに関する学習用データの数が、リンク番号15の道路リンクに関する学習用データの数よりも少なくなるように、学習データベース14に学習用データを蓄積させればよい。すなわち、全ての道路リンクについて、一定数の学習用データを蓄積させる必要がない。この結果、学習データベース14に蓄積すべきデータ量が膨大となることを抑制することができる。
【0154】
なお、道路リンク間での重みの数の違いは、隣接する道路リンクが関連道路リンクとして設定されており、道路リンク毎で関連道路リンクの数が異なることから生じる。つまり、関連道路リンクの数と、重みの数とは対応しており(前記のとおり、重みの数は「関連道路リンクの数+1」)、学習対象道路リンクに関連する関連道路リンクの数が多くなると、重みの数も多くなるためである。
また、学習用データの数を、推定システム11による推定処理において用いられる重みの数に応じて設定するとして説明したが、関連道路リンクの数と、重みの数とは対応していることから、学習用データの数を、推定システム11による推定処理において速度情報が用いられる他の道路リンク(関連道路リンク)の数に応じて設定してもよい。
【0155】
[2.5.9 学習システムによる学習サイクル]
学習システム12は、学習用データが取得される毎に重みの最適化を行うように、学習サイクルを設定してもよいが、本実施形態では、学習システム12は、最適化の処理を行う頻度を変更する機能を有しており、学習データベース14に蓄積されている道路リンク毎の学習用データの数に応じて、最適化の処理を行う頻度を設定する。
つまり、学習システム12は、例えば、最小自乗法等によって学習用データから重みの最適値を算出することから、学習用データの数が多い道路リンクに関しては、学習用データの数が少ない場合に比較して、学習が進んでいると考えられる。
【0156】
そこで、学習システム12は、学習データベース14に蓄積されている道路リンク毎の学習用データの数が少ない場合、最適化の処理を行う頻度を高める。図28は、学習サイクルを設定するための処理を説明するフロー図である。
図15では、リンク番号20の学習対象道路リンクに関して、学習用データの数は「3」である。そこで、学習システム12は、各道路リンクの学習用データの数を取得する(ステップS71)。
【0157】
そして、学習用データが少ない道路リンクについては、例えば、学習用データが学習データベース14に蓄積される毎に、最適化の処理を行わせる。つまり、学習システム12は、ステップS71で求めた学習用データの数と、予め設定されている閾値とを比較し、学習用データの数が閾値未満である場合(ステップS72のYesの場合)、最適化の処理を行う頻度を高める(ステップS73)。例えば、学習用データが学習データベース14に蓄積される毎に、最適化の処理を行わせる。
【0158】
ステップS71で求めた学習用データの数と、予め設定されている閾値とを比較し、学習用データの数が閾値以上である場合(ステップS72のNoの場合)、最適化の処理を行う頻度を低くする(ステップS74)。すなわち、学習データベース14に蓄積されている道路リンク毎の学習用データの数が多い場合、学習システム12は、最適化の処理を行う頻度を、学習用データの数が少ない場合よりも、低くするように変更する。
これは、学習用データが多い道路リンクでは、十分に学習がされて高い学習精度に達していると考えられるため、学習用データが学習データベース14に蓄積されても、その都度、最適化の処理を行わないで、例えば、1日に1回や、1週間に1回という低頻度で、最適化の処理を行わせる。
【0159】
このように、最適化の処理を行う頻度を変更することにより、学習システム12による学習処理の負荷を低減することができる。つまり、学習システム12による重みを最適化する処理には時間を要することから、蓄積されている学習用データの数が多くなれば、当該最適化の処理を行う頻度を低くすることにより、学習システム12の負荷を低減することができる。
【0160】
なお、図28では、学習データベース14に蓄積されている道路リンク毎の学習用データの数に応じて、最適化の処理を行う頻度を変更する場合を説明したが、速度情報の推定結果の精度に応じて、最適化の処理を行う頻度を変更してもよい。
【0161】
つまり、図29に示しているように、ある道路リンクに関して、実測値に基づく速度情報が得られると(ステップS81)、他の道路リンク(関連道路リンク)の速度情報と重みを用いて、当該ある道路リンクの速度情報を推定することができる(ステップS82)。そして、その推定値と実測値との差を求め、この差が予め設定されている閾値以下であれば、速度情報の推定結果の精度は高いと判断され(ステップS83のYes)、1日に1回や、1週間に1回という低頻度で、最適化の処理を行わせる(ステップS84)。
これに対して、推定値と実測値との差が、予め設定されている閾値を超えていれば、速度情報の推定結果の精度は低いと判断され(ステップS83のNo)、例えば、学習用データが学習データベース14に蓄積される毎に、最適化の処理を行わせるように、頻度を高くする(ステップS85)。
【0162】
なお、前記説明では、推定値と実測値との差(誤差)を、速度情報の推定結果の精度としたが、これ以外として、実測値に基づく速度情報が取得できていなくても(図29のステップS81を省略して)、速度情報の推定結果の精度を、推定値のばらつき、つまり推定値の標準偏差から判断してもよい。つまり、測定値のばらつきが、予め設定された閾値よりも大きいと、信頼度は低く、推定結果の精度が低い(ステップS83のNo)と判定される。この場合、最適化の処理の頻度が高く設定される(ステップS85)。
【0163】
このように速度情報の推定結果の精度に応じて、最適化の処理の頻度を変更する場合、推定システム11による速度情報の推定結果の精度が好ましくない場合には、最適化の処理を行う頻度を増やし、精度を高めることが可能となる。一方、推定システム11による推定情報の推定結果の精度が好ましい場合には、最適化の処理を行う頻度を減らすことができ、学習システム12の負荷を低減することができる。
【0164】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【0165】
また、推定対象道路リンクの速度情報を推定するために用いられる他の道路リンク(関連道路リンク)は、推定対象道路リンクに接続されているものに限らず、推定対象道路リンクとは離れているが、速度情報の時間的変化の仕方が似ている道路リンク(例えば、推定対象道路リンクと並行する道路リンク)であってもよい。
また、本実施形態では、推定対象の情報として規格化された速度情報を用いたが、速度に関する情報としては、規格化された速度情報を用いずに、リンク旅行速度そのものを利用してもよい。
【0166】
さらに、本実施形態の交通情報推定装置1の推定システム11が推定の対象とする交通情報は、速度情報に限らず、これに加えて/代えて、渋滞情報など他の交通情報とすることもできる。この場合、渋滞度は、上記速度情報の1を混雑、0を順調の2値に割り当てることで算出できる。また、渋滞度を推定対象の交通情報として扱う場合、ニューラルネットワークでは、2値のいずれかを決定するための閾値も推定用パラメータとして必要となる。この場合、閾値も学習部による学習対象となる。
【符号の説明】
【0167】
1:交通情報推定装置、 11:推定システム(推定部)、 12:学習システム(学習部)、 13:推定データベース、 17b:速度情報変換部(変換部)、 18b:速度情報変換部(変換部)、 19,59:変換情報
【特許請求の範囲】
【請求項1】
他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定装置であって、
他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定部と、
推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習部と、
を備えたことを特徴とする交通情報推定装置。
【請求項2】
前記学習部は、前記推定対象道路リンクになり得る道路リンクよりも後で分岐して存在する複数の枝道路リンク別に分類された前記学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化し、
前記推定部は、前記枝道路リンク別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定する請求項1に記載の交通情報推定装置。
【請求項3】
前記学習部は、前記学習用データを、前記複数の枝道路リンク別に分類して蓄積する請求項2に記載の交通情報推定装置。
【請求項4】
前記学習部は、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類された前記学習用データを用いて、当該条件別に推定用パラメータを最適化し、
前記推定部は、前記条件別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定する請求項1〜3のいずれか一項に記載の交通情報推定装置。
【請求項5】
前記学習部は、前記学習用データを、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類して蓄積する請求項4に記載の交通情報推定装置。
【請求項6】
前記学習部は、学習用データを所定のカテゴリー毎に分類して蓄積し、前記カテゴリーのうち、蓄積されている学習用データの数が多いカテゴリーの学習用データを優先して破棄し、破棄されずに残っている学習用データを用いて、前記推定用パラメータを最適化する請求項1〜5のいずれか一項に記載の交通情報推定装置。
【請求項7】
前記他の道路リンクにおける車両の速度を示すリンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる速度情報に、所定の変換情報に基づいて変換する変換部を有し、
前記変換部は、道路リンクの種別又は当該道路リンクの交通情報に応じて前記変換情報を変更して、前記速度情報に変換する請求項1〜6のいずれか一項に記載の交通情報推定装置。
【請求項8】
前記学習部は、推定用パラメータの最適化のために蓄積させる前記学習用データの数を、前記推定部による推定処理において交通情報が用いられる他の道路リンクの数、又は、前記推定部による推定処理において用いられる推定用パラメータの数に応じて設定する請求項1〜7のいずれか一項に記載の交通情報推定装置。
【請求項9】
前記推定部は、前記推定対象道路リンクの交通情報を推定する際に用いる算出方式を、当該推定対象道路リンクの種別又は当該推定部による交通情報の推定結果の精度に応じて、変更して交通情報を推定する請求項1〜8のいずれか一項に記載の交通情報推定装置。
【請求項10】
前記学習部は、蓄積されている道路リンク毎の前記学習用データの数に応じて、又は、前記推定部による交通情報の推定結果の精度に応じて、前記最適化の処理を行う頻度を変更する請求項1〜9のいずれか一項に記載の交通情報推定装置。
【請求項11】
前記推定部は、他の道路リンクの交通情報及び推定用パラメータを用いて推定した推定対象道路リンクの交通情報の信頼度を求め、
前記推定部は、前記信頼度に基づいて、前記推定処理とは別の推定処理に変更して、推定対象道路リンクの交通情報を推定する請求項1〜10のいずれか一項に記載の交通情報推定装置。
【請求項12】
前記推定部は、
他の道路リンクの交通情報及び推定用パラメータを用いて推定対象道路リンクの交通情報を推定する第一推定処理機能と、
過去に取得した道路リンクの交通情報を統計して得た統計情報を用いて、推定対象道路リンクの交通情報を推定する第二推定処理機能と、を有し、
前記推定部は、
道路リンクにおける実測値に基づく交通情報が得られると、当該実測値に基づく交通情報と、前記第一推定処理機能及び前記第二推定処理機能それぞれによって推定された交通情報との誤差を求め、当該誤差の比較に基づいて、前記道路リンクにおいて、当該第一推定処理機能と当該第二推定処理機能との内のいずれを用いるか決定する請求項1〜11のいずれか一項に記載の交通情報推定装置。
【請求項13】
コンピュータを、請求項1〜12のいずれか1項に記載の交通情報推定装置として機能させるためのコンピュータプログラム。
【請求項14】
他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定方法であって、
他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定ステップと、
推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習ステップと、
を備えたことを特徴とする交通情報推定方法。
【請求項1】
他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定装置であって、
他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定部と、
推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習部と、
を備えたことを特徴とする交通情報推定装置。
【請求項2】
前記学習部は、前記推定対象道路リンクになり得る道路リンクよりも後で分岐して存在する複数の枝道路リンク別に分類された前記学習用データを用いて、当該枝道路リンク別に推定用パラメータを最適化し、
前記推定部は、前記枝道路リンク別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定する請求項1に記載の交通情報推定装置。
【請求項3】
前記学習部は、前記学習用データを、前記複数の枝道路リンク別に分類して蓄積する請求項2に記載の交通情報推定装置。
【請求項4】
前記学習部は、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類された前記学習用データを用いて、当該条件別に推定用パラメータを最適化し、
前記推定部は、前記条件別に最適化された前記推定用パラメータを用いて推定対象道路リンクの交通情報を推定する請求項1〜3のいずれか一項に記載の交通情報推定装置。
【請求項5】
前記学習部は、前記学習用データを、暦、時間帯、及び、天候の内の少なくとも一つの条件別に分類して蓄積する請求項4に記載の交通情報推定装置。
【請求項6】
前記学習部は、学習用データを所定のカテゴリー毎に分類して蓄積し、前記カテゴリーのうち、蓄積されている学習用データの数が多いカテゴリーの学習用データを優先して破棄し、破棄されずに残っている学習用データを用いて、前記推定用パラメータを最適化する請求項1〜5のいずれか一項に記載の交通情報推定装置。
【請求項7】
前記他の道路リンクにおける車両の速度を示すリンク旅行速度を、当該リンク旅行速度の大小に応じた値をとる速度情報に、所定の変換情報に基づいて変換する変換部を有し、
前記変換部は、道路リンクの種別又は当該道路リンクの交通情報に応じて前記変換情報を変更して、前記速度情報に変換する請求項1〜6のいずれか一項に記載の交通情報推定装置。
【請求項8】
前記学習部は、推定用パラメータの最適化のために蓄積させる前記学習用データの数を、前記推定部による推定処理において交通情報が用いられる他の道路リンクの数、又は、前記推定部による推定処理において用いられる推定用パラメータの数に応じて設定する請求項1〜7のいずれか一項に記載の交通情報推定装置。
【請求項9】
前記推定部は、前記推定対象道路リンクの交通情報を推定する際に用いる算出方式を、当該推定対象道路リンクの種別又は当該推定部による交通情報の推定結果の精度に応じて、変更して交通情報を推定する請求項1〜8のいずれか一項に記載の交通情報推定装置。
【請求項10】
前記学習部は、蓄積されている道路リンク毎の前記学習用データの数に応じて、又は、前記推定部による交通情報の推定結果の精度に応じて、前記最適化の処理を行う頻度を変更する請求項1〜9のいずれか一項に記載の交通情報推定装置。
【請求項11】
前記推定部は、他の道路リンクの交通情報及び推定用パラメータを用いて推定した推定対象道路リンクの交通情報の信頼度を求め、
前記推定部は、前記信頼度に基づいて、前記推定処理とは別の推定処理に変更して、推定対象道路リンクの交通情報を推定する請求項1〜10のいずれか一項に記載の交通情報推定装置。
【請求項12】
前記推定部は、
他の道路リンクの交通情報及び推定用パラメータを用いて推定対象道路リンクの交通情報を推定する第一推定処理機能と、
過去に取得した道路リンクの交通情報を統計して得た統計情報を用いて、推定対象道路リンクの交通情報を推定する第二推定処理機能と、を有し、
前記推定部は、
道路リンクにおける実測値に基づく交通情報が得られると、当該実測値に基づく交通情報と、前記第一推定処理機能及び前記第二推定処理機能それぞれによって推定された交通情報との誤差を求め、当該誤差の比較に基づいて、前記道路リンクにおいて、当該第一推定処理機能と当該第二推定処理機能との内のいずれを用いるか決定する請求項1〜11のいずれか一項に記載の交通情報推定装置。
【請求項13】
コンピュータを、請求項1〜12のいずれか1項に記載の交通情報推定装置として機能させるためのコンピュータプログラム。
【請求項14】
他の道路リンクの交通情報に基づいて、推定対象道路リンクの交通情報を推定する交通情報推定方法であって、
他の道路リンクの交通情報及び推定用パラメータを用いて、推定対象道路リンクの交通情報を推定する推定ステップと、
推定対象道路リンクになり得る道路リンクにおける実測値に基づく交通情報と、当該推定対象道路リンクの交通情報を推定するために用いられる前記他の道路リンクの交通情報との組み合わせを学習用データとして蓄積し、蓄積された学習用データを用いて前記推定用パラメータを最適化する学習ステップと、
を備えたことを特徴とする交通情報推定方法。
【図1】


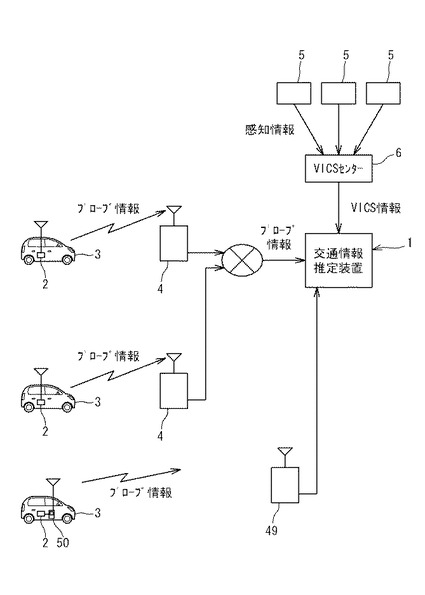
【図2】
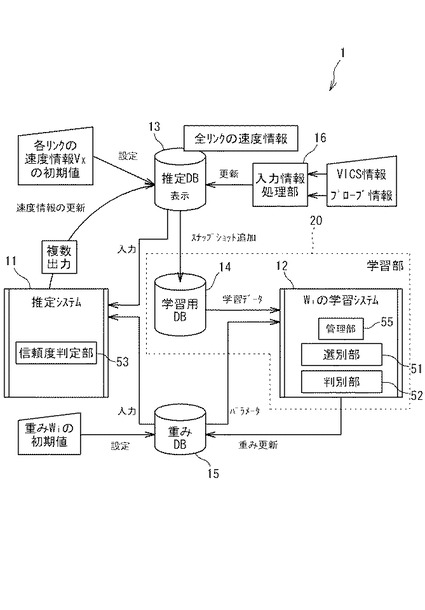
【図3】
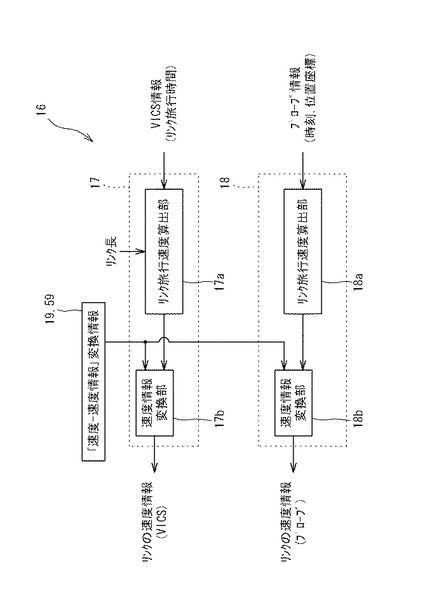
【図4】
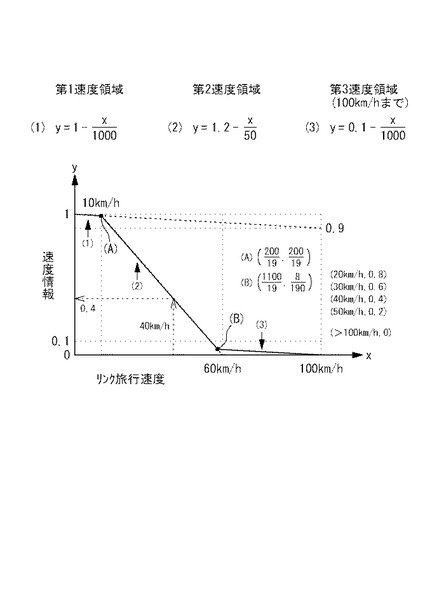
【図5】
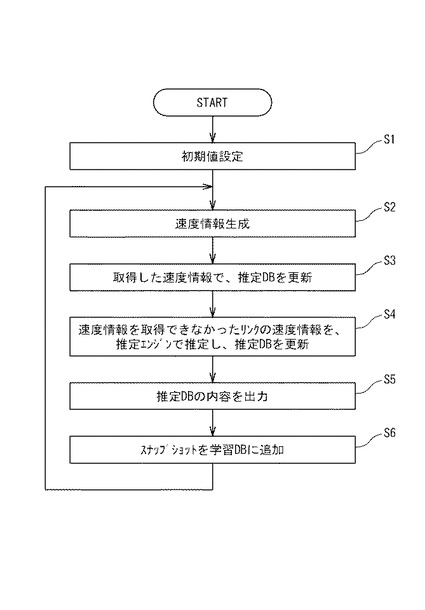
【図6】
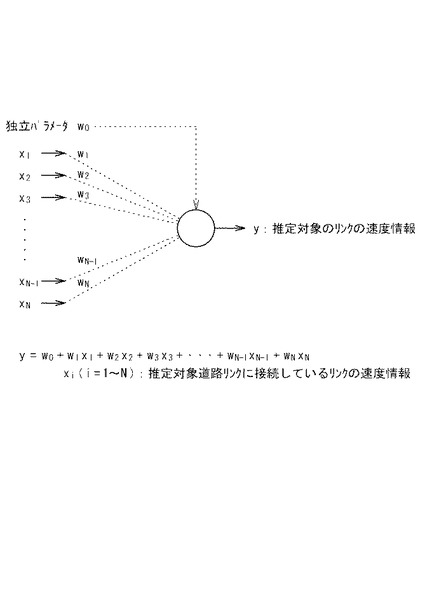
【図7】
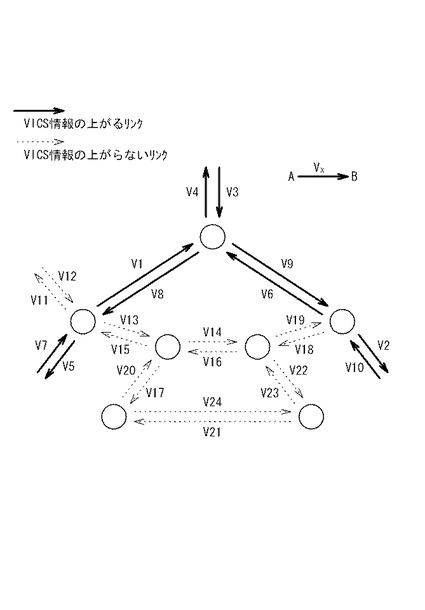
【図8】
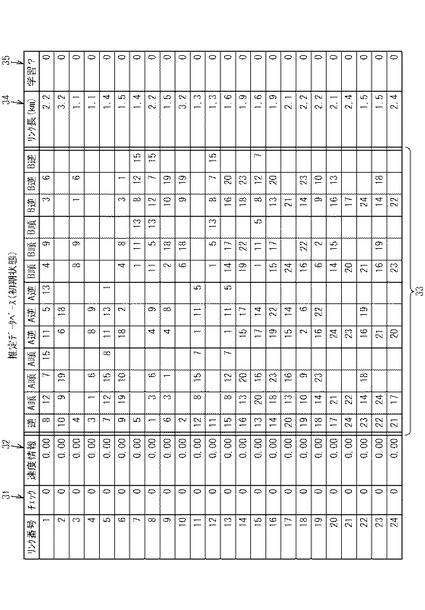
【図9】
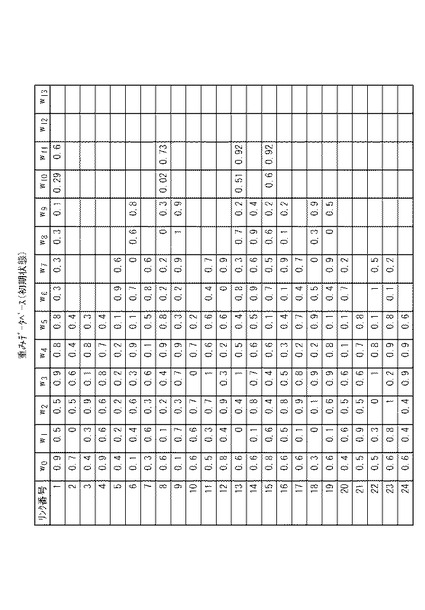
【図10】
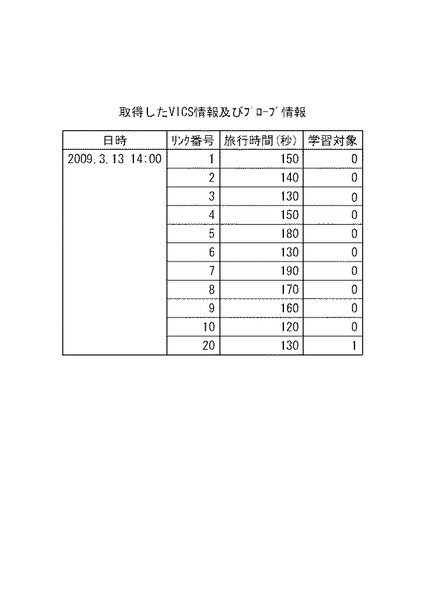
【図11】
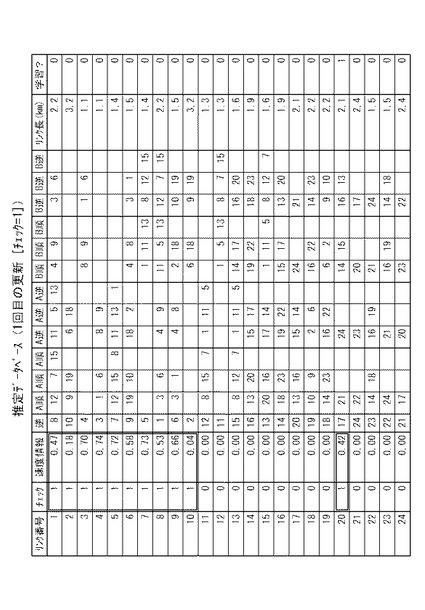
【図12】
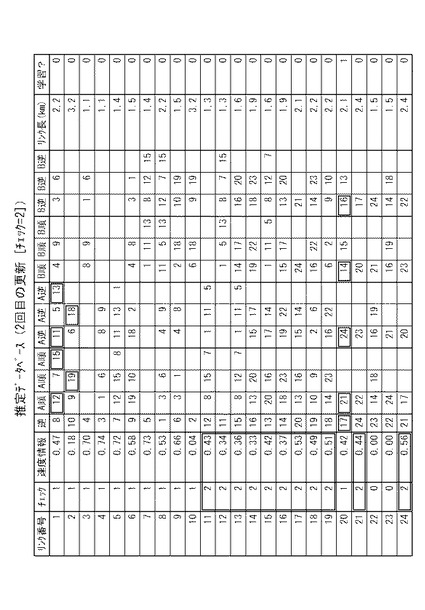
【図13】
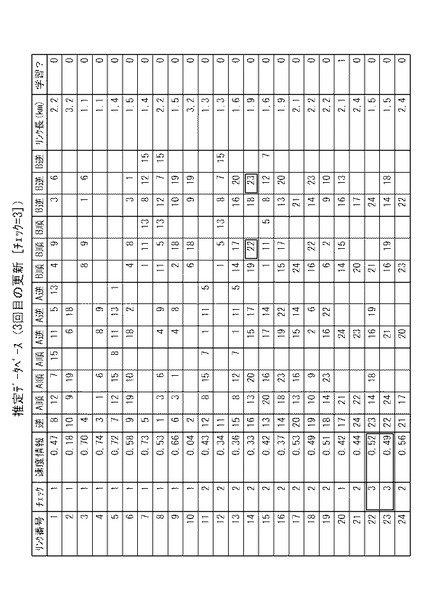
【図14】
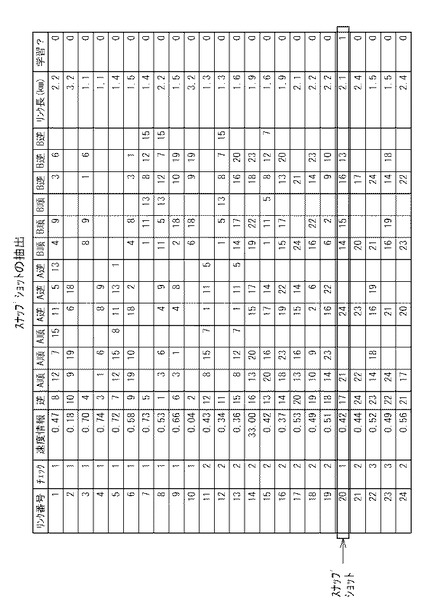
【図15】
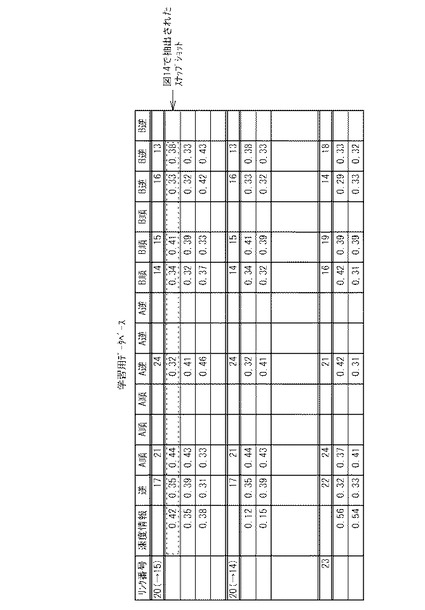
【図16】
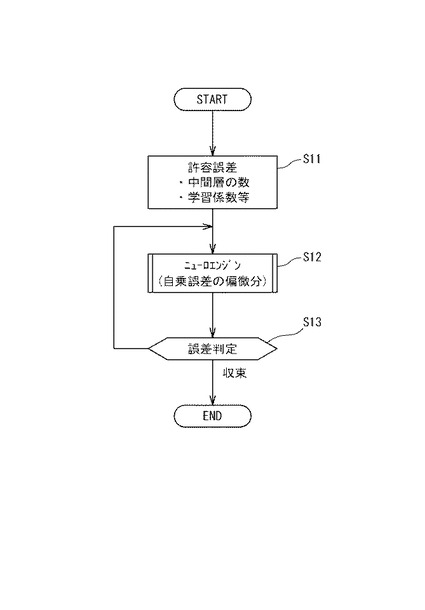
【図17】
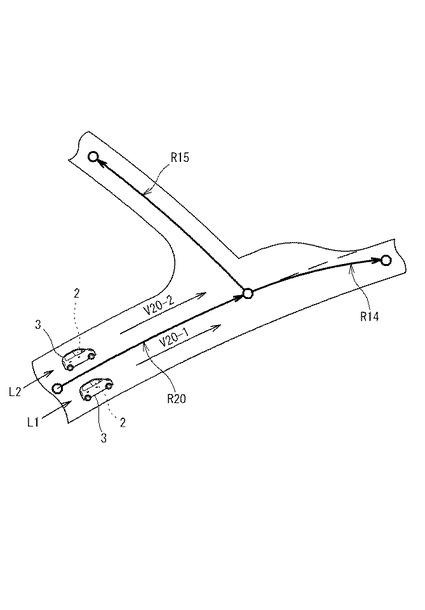
【図18】
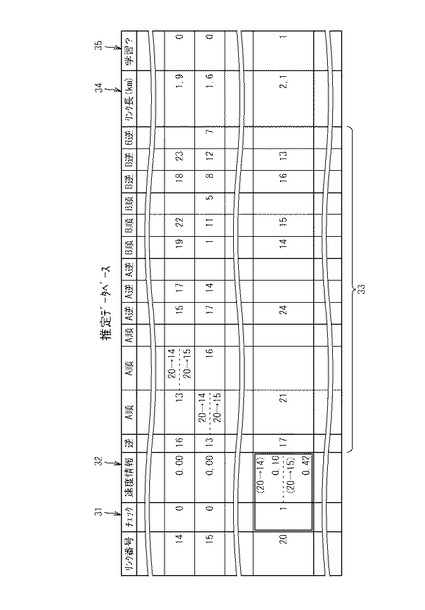
【図19】
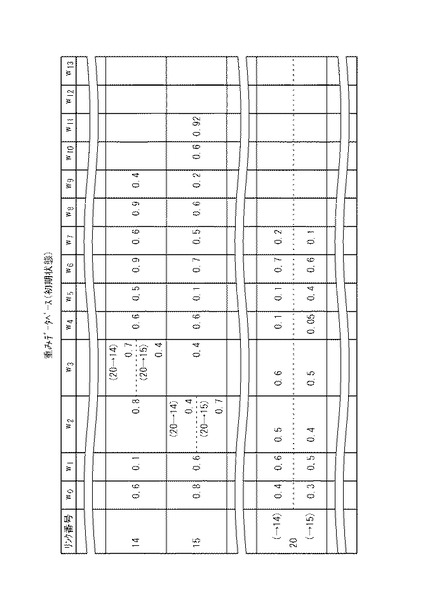
【図20】
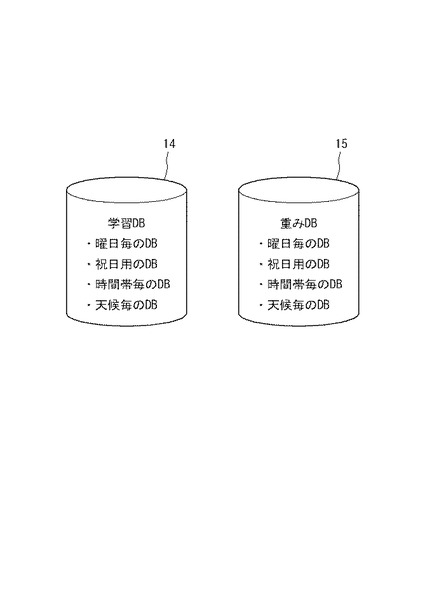
【図21】
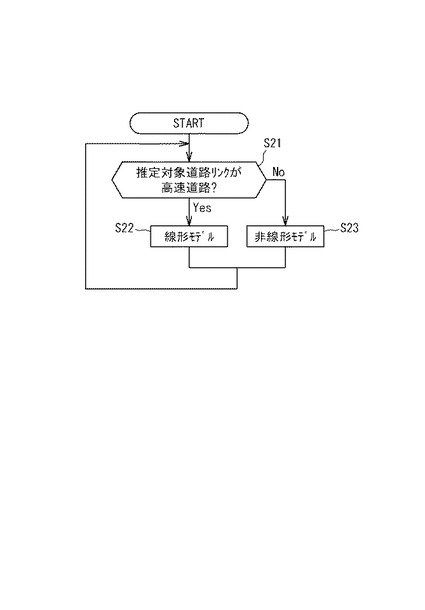
【図22】
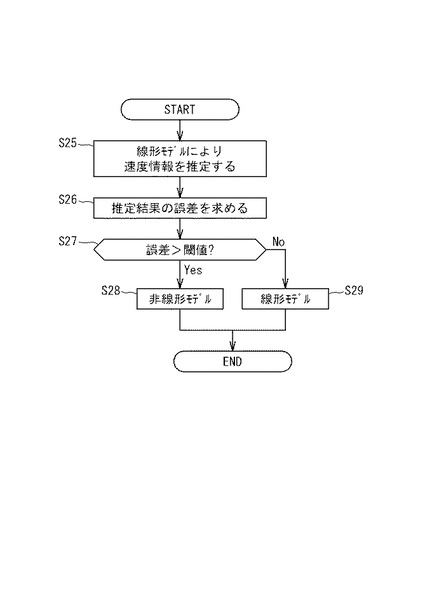
【図23】
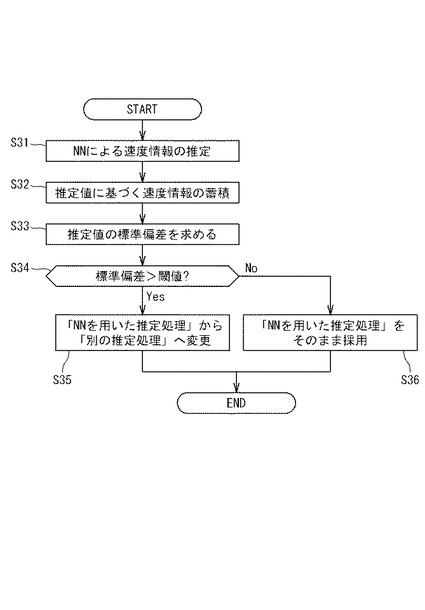
【図24】
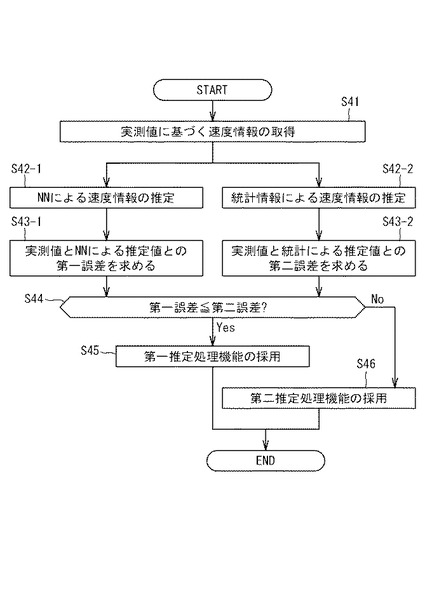
【図25】
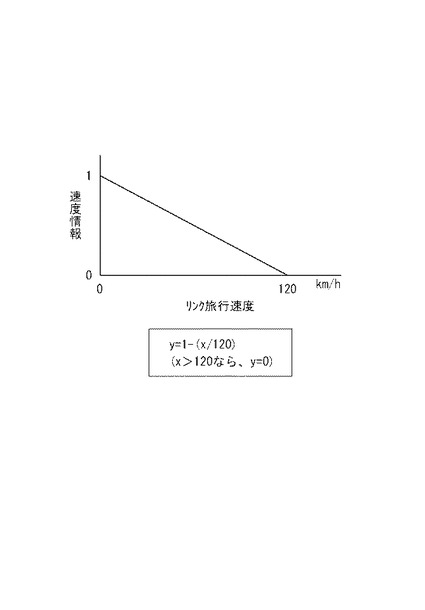
【図26】
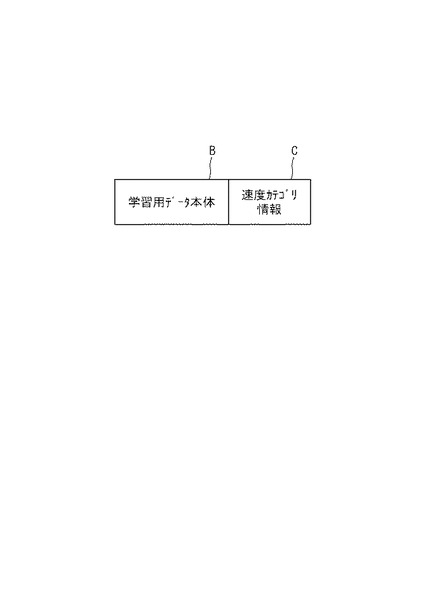
【図27】
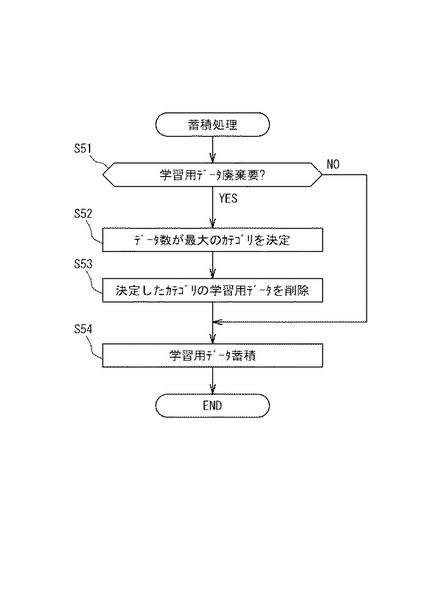
【図28】
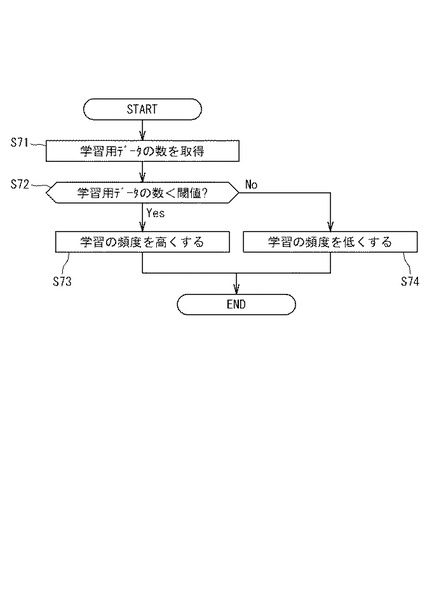
【図29】
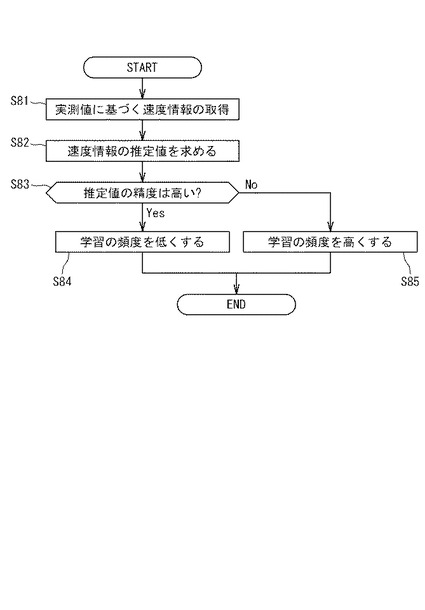
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2011−113547(P2011−113547A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−272535(P2009−272535)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]