
交通情報提供システム
【課題】プローブ情報を収集して交通情報を生成するシステムにあって、交通情報センタが配信する交通情報と実際の道路状況とが異なる場合に、信頼性の高い交通情報の更新を行う。
【解決手段】交通情報提供システム1は、車両2に搭載されプローブ機能を有する車載器3と、各車両2から送信されるプローブ情報を収集して交通情報を生成し各車両2に配信する交通情報センタ4とを含む。車載器3において、自車両2の走行実績情報と交通情報センタ4から配信された交通情報と間で乖離の有無を判定し、乖離があると判定した場合に該交通情報センタ4に対して乖離情報を送信する。交通情報センタ4側では、同一の道路リンクに関しての乖離情報を複数の車両2から受信することを条件に、当該道路リンクにおける交通情報を更新する。
【解決手段】交通情報提供システム1は、車両2に搭載されプローブ機能を有する車載器3と、各車両2から送信されるプローブ情報を収集して交通情報を生成し各車両2に配信する交通情報センタ4とを含む。車載器3において、自車両2の走行実績情報と交通情報センタ4から配信された交通情報と間で乖離の有無を判定し、乖離があると判定した場合に該交通情報センタ4に対して乖離情報を送信する。交通情報センタ4側では、同一の道路リンクに関しての乖離情報を複数の車両2から受信することを条件に、当該道路リンクにおける交通情報を更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されナビゲーション機能及びプローブ機能を備える車載器と、その車載器と通信手段を介して接続可能な交通情報センタとを含んで構成される交通情報提供システムに関する。
【背景技術】
【0002】
この種の交通情報提供システムの一例として、特許文献1に記載されたものがある。このシステムでは、交通情報センタは、外部の交通情報収集源から交通情報を収集すると共に、プローブ機能を有する車両(プローブカー)から位置及び時刻に基づく走行履歴情報を受信して交通情報を編集し、車両側からの要求により、新しい交通情報を当該車両に送信する。そして、車両のナビゲーション装置は、交通情報センタから取得した交通情報(渋滞情報)に基づいて、目的地への到着予定時刻を算出したり、渋滞を回避する経路を探索して案内したりするようになっている。
【0003】
また、この特許文献1のシステムでは、車両と交通情報センタとの間の通信の頻度をできるだけ少なくするために、車両側において、過去に取得して格納された交通情報に基づいて予想した予想到着距離情報と、実際の走行履歴情報とを比較し、情報の乖離が大きいと判断した場合にのみ、交通情報センタと通信して、新たな交通情報を取得するようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−280320号公報(段落[0030]〜[0036]、図5)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の技術においては、車両側で、配信された交通情報と実際の状況との乖離が大きいと判断したときに、交通情報センタに対し、交通情報の要求と共にプローブ情報を送信するようにしている。従って、交通情報センタでは、そのプローブ情報に基づいて新たな交通情報を作成することが可能となる。しかし、その構成では、例えば車両のエンジンを切らずに買い物をした場合などは、交通情報センタで渋滞が起こっていると判断してしまうなど、情報の信頼性が低く、誤った交通情報を提供してしまう虞があった。また、車両側における、交通情報と実際の状況とが乖離しているかどうかの判断(ひいてはプローブ情報の送信)に、比較的長い時間(例えば15分)がかかり、情報の鮮度に劣る事情と渋滞から順調走行へ道路状況が急変しても対応できない事情もあった。
【0006】
本発明は上記事情に鑑みてなされたもので、その目的は、プローブ情報を収集して交通情報を生成するシステムにあって、交通情報センタが配信する交通情報と実際の道路状況とが異なる場合に、交通情報センタにおいて信頼性の高い交通情報の更新を行うことが可能な交通情報提供システムを提供するにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の交通情報提供システムは、車両に搭載され、自車位置を検出すると共に目的地までの経路案内を行うナビゲーション機能、及び、自車の位置情報を含むプローブ情報を送信するプローブ機能を備える車載器と、前記車載器と通信手段を介して接続され、各車両から送信されるプローブ情報を収集して交通情報を生成し、その交通情報を各車両に配信する交通情報センタとを含んで構成されるシステムであって、前記車載器は、自車が走行している道路リンク毎に、自車の走行実績情報と前記交通情報センタから配信された交通情報との乖離の有無を判定する判定手段を備え、この判定手段により乖離があると判定されたときに、当該交通情報センタに対して乖離情報を送信し、前記交通情報センタは、同一の道路リンクに関しての乖離情報を複数の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新するところに特徴を有する(請求項1の発明)。
【0008】
上記構成によれば、車載器において、判定手段により、自車の走行実績情報と交通情報センタから配信された交通情報との乖離の有無が判定され、乖離があると判定された場合には、交通情報センタに対して乖離情報が送信される。そして、交通情報センタは、その乖離情報に応じて交通情報を現状に合ったものに更新するのであるが、このとき、同一の道路リンクに関しての乖離情報を複数の車両から受信することを条件に、当該道路リンクにおける交通情報を更新する。従って、誤った交通情報に更新してしまうことを極力防止し、信頼性の高い交通情報の更新を行うことができる。
【0009】
本発明では、上記判定手段を、同一道路リンクに対し、前記交通情報に基づいて想定される所定距離又は所定地点までの走行所要時間と、前記走行実績情報に基づく当該所定距離又は所定地点までの走行所要時間とが所定時間以上乖離しているかどうかを判定するように構成することができる(請求項2の発明)。また、判定手段を、同一道路リンクに対し、前記交通情報に基づいて想定される所定時間経過後の走行距離又は到達地点と、前記走行実績情報に基づく当該所定時間経過後の走行距離又は到達地点とが所定値以上乖離しているかどうかを判定するように構成することもできる(請求項3の発明)。いずれも、リンク毎に、自車の走行実績情報と交通情報センタから配信された交通情報との乖離の有無を確実に判定することができる。
【0010】
より具体的には、前記判定手段を、前記交通情報に基づいて想定される速度で、前記道路リンクを始点から終点まで走行すると仮定した場合の、時間経過に対する走行距離又は到達地点の関係を表す基準関数に対し、時間経過に対する走行距離又は到達地点の乖離判定しきい値となる上限関数及び下限関数を設定し、当該道路リンク内で、始点からの任意の時間経過した際の、前記走行実績情報に基づく走行距離又は到達地点が、前記上限関数による走行距離又は到達地点を越えたとき、或いは、前記下限関数による走行距離又は到達地点に至らないときに、所定値以上乖離していると判定する構成とすることができる(請求項4の発明)。
【0011】
これによれば、道路リンクにおいて、始点からの時間経過に対する自車の実際の走行距離又は到達地点が、乖離判定しきい値となる上限関数による走行距離又は到達地点を越えたときには、先程まで渋滞していたものの、瞬く間にその渋滞が解消されたと考えられ、また、乖離判定しきい値となる下限関数による走行距離又は到達地点に至らないときには、順調に走行していたものが急に渋滞が発生したと考えられる。従って、判定手段によって、実際の道路状況の急激な変化を容易に判断することができる。
【0012】
さらにこのとき、前記上限関数及び下限関数を、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々各時間経過に関して常に一定の走行距離だけ離間するように設定したり(請求項5の発明)、或いは、前記上限関数及び下限関数は、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々所定値を乗算した値となるように設定したり(請求項6の発明)することができる。いずれも、上限関数及び下限関数を適切に設定することができる。
【0013】
このように、乖離の有無の判断に上限関数及び下限関数を用いる場合には、それら上限関数及び下限関数を、車両側で自在に設定可能に構成したり、或いは、前記交通情報センタ側で設定されたものが前記車載器に配信されるように構成したりすることができる(請求項7の発明)。これによれば、乖離の有無を判定する際の判定基準を、車両側或いは交通情報センタ側で自在に調整することが可能となり、実情にあった判定基準で乖離の有無を判断できるようになる。
【0014】
前記判定手段により乖離があると判定されたときに、当該道路リンク内の前記走行実績情報に基づく時間経過と走行距離又は到達地点との関係が、前記基準関数による時間経過と走行距離又は到達地点との関係を表す想定移動線と交差している場合には、その交差点の位置及び時間のデータをも併せて送信するように構成することができる(請求項8の発明)。道路リンク内での時間経過と走行距離との関係が、想定移動線と交差した場合には、その前後で車両の速度が大きく変動している、つまり、その交差点で車両の流れが大きく変化しているということができるので、そのデータをも併せて送信することによって、道路リンク内における車両の流れの変化した場所や時間(時刻)を交通情報センタに知らせることができる。
【0015】
また、本発明では、前記交通情報センタにおいては、同一の道路リンクに関して、類似する乖離情報を所定台数以上の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新するように構成することができ(請求項9の発明)、これにより、信頼性をより一層高めることができる。
【0016】
本発明においては、前記車載器が、前記乖離情報を前記プローブ情報に付加して送信するように構成することができる(請求項10の発明)。さらには、前記車載器が、前記プローブ情報を、所定時間経過毎又は自車両が所定位置に到達したタイミングで送信すると共に、前記判定手段により乖離があると判定されたタイミングで、前記乖離情報を含むプローブ情報を送信するように構成することができる(請求項11の発明)。これによれば、交通情報センタに対し、プローブ情報をこまめに送信することが可能となり、しかも、乖離情報を速やかに送信することができる。交通情報センタは、いわば鮮度の高い情報を収集し、それらプローブ情報及び乖離情報に基づいて交通情報を生成することができる。従って、常に最新の交通情報を生成して車載器に配信することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施例を示すもので、交通情報提供システムの全体構成を概略的に示すブロック図
【図2】車載器の電気的構成を概略的に示すブロック図
【図3】車載器のプローブ機能を示す機能ブロック図
【図4】乖離の有無の判定の手法を説明するための図(その1)
【図5】乖離の有無の判定の手法を説明するための図(その2)
【図6】車載器と交通情報センタとの間でのプローブ情報の送受信及び交通情報の送受信の処理手順を示すフローチャート
【発明を実施するための形態】
【0018】
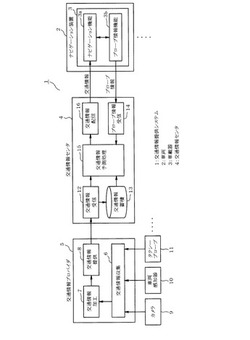
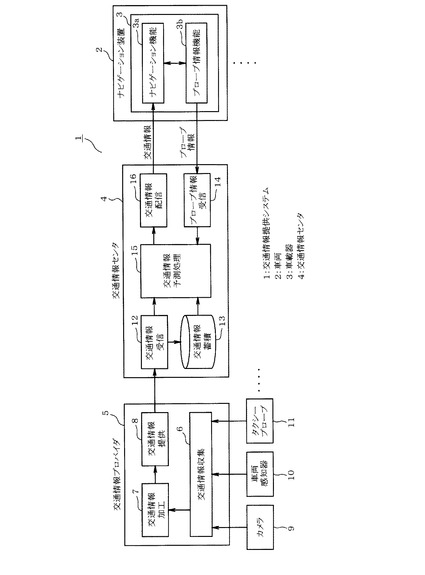
以下、本発明を具体化した一実施例について、図面を参照しながら説明する。図1は、本実施例に係る交通情報提供システム1の構成を概略的に示しており、この交通情報提供システム1は、車両2に設けられた車載器(ナビゲーション装置)3と、交通情報センタ4と、交通情報プロバイダ5とを含んで構成されている。前記車載器3と交通情報センタ4との間は、例えば携帯電話網や無線LAN等の通信手段を介して接続可能とされている。また、交通情報センタ4と交通情報プロバイダ5との間も同様の通信手段または電話の専用回線やインターネット回線等の有線の通信手段を介して接続されている。
【0019】
尚、本実施例では、交通情報センタ4は、例えば「G−BOOK」等の会員制のものとなっており、車両2のユーザは、会員になることによって、交通情報センタ4からの交通情報を含む各種サービスを受けることができるシステムとされている。従って、図示はしていないが、会員となっているユーザの車両2(車載器3)は多数台が存在し、それら多数の車載器3が、夫々交通情報センタ4に対して通信(接続)可能とされている。
【0020】
図1に機能ブロックで示すように、前記交通情報プロバイダ5は、交通情報収集部6、交通情報加工部7、交通情報提供部8を有して構成されている。前記交通情報収集部6は、道路の各所に設けられたカメラ9及び車両感知器10、タクシープローブ11等から道路交通情報を収集する。前記交通情報加工部7は、それら収集した交通情報を加工し、交通情報提供部8は、前記交通情報センタ4を含む関係各所に、加工した交通情報を送信する。この場合、加工及び送信される交通情報は、所定時間間隔例えば5分間隔で更新されていくようになっている。
【0021】
前記交通情報センタ4は、前記交通情報プロバイダ5からの交通情報を受信する交通情報受信部12、道路地図データを記憶すると共に入手した交通情報を蓄積するデータベース13、後述する各車両2の車載器3から送信されたプローブ情報を受信するプローブ情報受信部14、各交通情報及びプローブ情報を総合的に処理して交通情報を予測(生成)する交通情報予測処理部15、生成した交通情報を各車両2(車載器3)に配信する交通情報配信部16を備えている。尚、周知のように、前記交通情報を蓄積するデータベース13に蓄積記憶されるデータは過去の交通情報で、例えば同じ曜日、同じ時間帯、同じ天候等に分割し、統計したデータの集合からなる。
【0022】
詳しくは後述するように、各車載器3は、車両2(自車)の走行実績情報と、配信された交通情報とが乖離していると判断した際には、プローブ情報と共に乖離情報を送信するようになっている。交通情報センタ4(交通情報予測処理部15)は、前記プローブ情報受信部14により受信したプローブ情報に乖離情報が含まれていた場合には、同一の道路リンクに関しての乖離情報を複数の車両2から受信したことを条件に、それら乖離情報に基づいて、当該道路リンクにおける交通情報を更新するようになっている。
【0023】
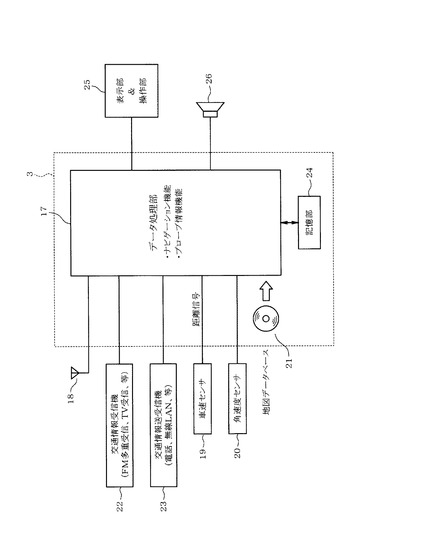
前記車載器3は、自車位置を検出すると共に目的地までの経路案内を行うナビゲーション機能3a、及び、自車の位置情報を含むプローブ情報を作成し前記交通情報センタ4に送信するプローブ機能3bを有している。図2は、この車載器3のハードウエア的構成を概略的に示している。この車載器3は、コンピュータ(CPU)を主体として構成され車載器3全体を制御するデータ処理部17を備えると共に、このデータ処理部17に以下のような各装置を接続して構成される。
【0024】
即ち、データ処理部17には、GPS用人工衛星からの電波を受信するGPS受信機18、車速センサ19.角速度センサ20、地図データベース21、VICS(登録商標)等の放送を受信して交通情報を得るFM受信機等の交通情報受信機22、電話や無線LAN等の通信手段から交通情報を得る交通情報送受信機23、記憶部24、液晶ディスプレイからなる表示部とタッチパネルやメカスイッチを含む操作部とを一体的に組込んだ表示ユニット25、合成音声等を出力するスピーカ26が接続されている。前記地図データベース21は、前記道路地図データやそれに付随する施設データ(目的地データ)等を記憶したDVDやハードディスク等の地図データ記録メディア及びそのデータを読出すためのドライブ装置から構成される。
【0025】
前記データ処理部17は、そのソフトウエア的構成(プログラムの実行)により、前記GPS受信機18、車速センサ19、角速度センサ20からの信号の入力に基づいて、自車両2の現在位置(絶対位置)、進行方向、速度や走行距離、現在時刻等を高精度で検出する(図3の現在位置検出部27)。そして、検出された自車両2の現在位置、及び、前記地図データベース21から得られる地図データに基づいて、表示ユニット25の表示画面に、道路地図と共に自車両2の現在位置及び進行方向を表示させるロケーションの機能を実現する。
【0026】
また、前記データ処理部17は、ユーザの表示ユニット25の操作部の操作により目的地が指定されると、車両2の出発地(現在位置)か指定された目的地までの推奨する走行経路(ルート)を、例えば周知のダイクストラ法を用いて自動的に計算し、求められた目的地までのルートを案内するルートガイダンスの機能を実現する。このルートガイダンスは、表示ユニット25の表示画面に、道路地図に重ね合わせて走行すべき経路を表示すると共に、スピーカ26から右左折の指示等の案内音声を出力することにより行われる。
【0027】
このとき、データ処理部17が経路探索を行うにあたっては、FM多重放送による交通情報の配信データ(現況の交通情報)を使用する方法も有るが、今後の交通情報を予測した前記交通情報センタ4(交通情報配信部16)から配信された最新の交通情報を、交通情報送受信機23(図3の交通情報受信部33)により受信する。この交通情報は、道路交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)や、気象情報(天候、風向き、路面状況)等のデータからなる。そして、その最新の予測した交通情報を利用して、目的地までに要する時間が最短となる経路を求めるようになっている。尚、このルートガイダンスでは、目的地への到着予測時刻を計算し、表示ユニット25の画面に表示することも行われる。
【0028】
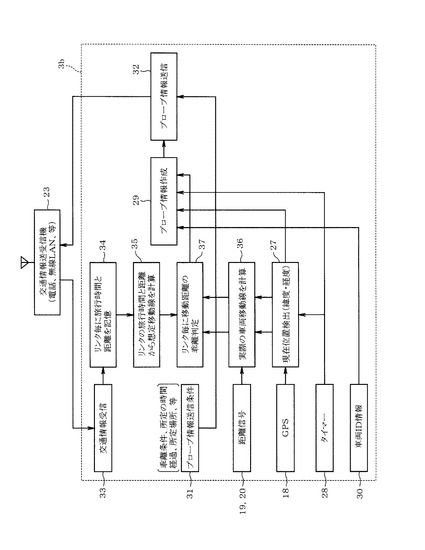
そして、図3は、上記した車載器3のプローブ機能3bに関する機能ブロック図である。このプローブ機能3bは、上記車載器3のハードウエア的構成、及び、データ処理部17のソフトウエア的構成によって実現される。即ち、現在位置検出部27は、前記GPS受信機18のGPS信号、及びタイマー28からの信号に基づいて、車両2の現在位置(緯度、経度)を検出する。
【0029】
プローブ情報作成部29は、前記現在位置検出部27からの現在位置情報、タイマー28からの時刻情報、車両ID情報記憶部30からの車両ID情報に基づいて、自車両2の走行履歴(位置、速度、時刻等の履歴情報)からなるプローブ情報を作成する。また、後述するように、プローブ情報作成部29に、乖離判定部37から乖離情報が入力された場合には、プローブ情報に乖離情報が含まれるようになっている。
【0030】
プローブ情報送信条件判断部31は、プローブ情報を送信すべきタイミングであるか(送信条件が成立したか)どうかを判断する。本実施例で、プローブ情報の送信は、所定時間(例えば5分)経過毎、或いは所定距離(例えば5km)走行毎、及び、自車両2が所定位置(例えば高速道路のランプやジャンクションの2km手前)に至ったときのタイミングでなされると共に、後述の乖離判定部37が、乖離があると判定したタイミングでなされる。プローブ情報送信部32は、プローブ情報送信条件判断部31が、プローブ情報の送信タイミングと判断した際に、プローブ情報作成部29において作成されたプローブ情報を、交通情報送受信機23を介して交通情報センタ4に対して送信する。
【0031】
さて、本実施例では、後の作用説明にて詳述するように、車載器3のプローブ機能3bにおいて、上記のようなプローブ情報を作成し送信する処理を実行することに加えて、自車両2が走行している道路リンク毎に、自車両2の走行実績情報と交通情報センタ4から配信された交通情報との間の乖離の有無を判定し、乖離があると判定したときに、該交通情報センタ4に対し、プローブ情報と共に乖離情報を送信するようになっている。従って、データ処理部17が判定手段として機能する。
【0032】
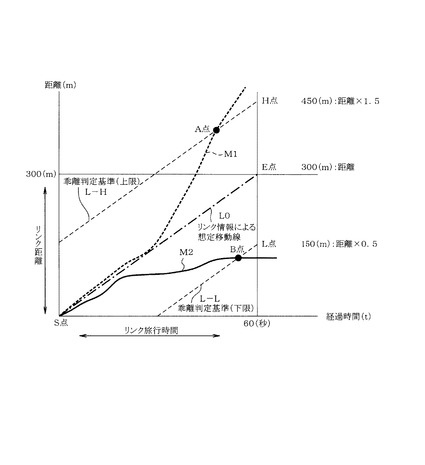
図3には、プローブ機能3bにおける乖離の判断及び乖離情報の送信のための機能ブロック構成も併せて示している。交通情報受信部33は、交通情報センタ4の配信する交通情報を、交通情報送受信機23を介して受信する。旅行時間記憶部34は、得られた交通情報に基づいて、自車両2が走行する道路リンク毎の、旅行時間と距離とを求めて記憶する。想定移動線算出部35は、前記道路リンク毎の旅行時間と走行距離とから、想定移動線L0(図4、図5参照)を算出する。図4、図5に例示するように、想定移動線L0は、該当する道路リンクを、始点から終点まで、交通情報に応じて想定される速度(一定速度)で走行すると仮定した場合の時間経過に伴う基準走行距離(基準関数)を示す直線となる。
【0033】
一方、図3において、車両移動線計算部36は、前記車速センサ19や角速度センサ20から得られる距離信号と、前記現在位置検出部27から得られる現在位置情報に基づき、自車両2の道路リンクの実際の走行状況である走行実績情報、つまり走行中の道路リンクの時間経過と走行距離との関係を表す車両移動線M1〜M4(図4、図5参照)を算出する。乖離判定部37は、想定移動線算出部35からの想定移動線L0と、車両移動線計算部36が算出した車両移動線M1〜M4とから、乖離の有無を判定する。乖離の有無を判定する具体的な手法については、次の作用説明で述べる。
【0034】
この場合、乖離があるとは、該当する道路リンクにおいて、交通情報センタ4からの交通情報においては、渋滞発生中(或いは常に交通量が多く通過に時間が掛かる)とされていたものが、渋滞が解消されていた等、実際にはスムーズに走行できた場合や、逆に、交通情報センタ4からの交通情報においては渋滞の発生が無い(或いは常に交通量が少ない)とされていたものが、自車両2の走行時に、事故が発生した等、急に渋滞するようになったような場合を含んでいる。
【0035】
前記乖離判定部37が、乖離がある(乖離が大きい)と判定した場合には、上述のように、プローブ情報作成部29の作成するプローブ情報に当該乖離情報(乖離の種類(渋滞発生か解消か)、並びに位置、時刻等の情報)が含まれるようになる。乖離があると判断された時点で、プローブ情報送信条件判断部31がプローブ情報の送信タイミングと判断し、ローブ情報送信部32は、乖離情報が含まれたプローブ情報を、速やかに交通情報送受信機23を介して交通情報センタ4に対して送信する。
【0036】
そして、前記交通情報センタ4(交通情報予測処理部15)は、車載器3から受信したプローブ情報に乖離情報が含まれている場合には、同一の道路リンクに関しての乖離情報を複数の車両2(車載器3)から受信したことを条件に、その乖離情報に応じて当該道路リンクにおける交通情報を更新するようになっている。
【0037】
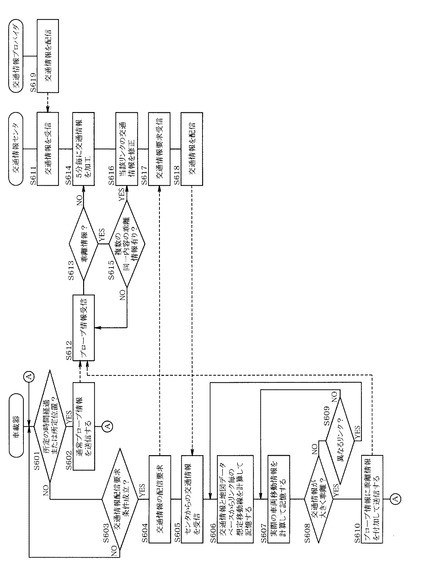
次に、上記のように構成された本実施例の交通情報提供システム1の作用について、図4〜図6も参照して述べる。図6のフローチャートは、前記車載器3及び交通情報センタ4(並びに交通情報プロバイダ5)の間で実行されるプローブ情報の送受信及び交通情報の送受信の処理手順を示している。まず、ステップS601からの、車載器3(車両2)側における処理について述べる。
【0038】
ステップS601では、プローブ情報の送信タイミングかどうかが判断される。この場合の送信タイミングは、前回のプローブ情報の送信から所定時間(例えば5分)が経過したかどうか(或いは所定距離(例えば5km)走行したかどうか)、及び自車両2が所定位置(例えば高速道路のランプやジャンクションの2km手前)に至ったかどうかで判断される。プローブ情報の送信タイミングになった場合には(ステップS601にてYes)、次のステップS602にて、情報センタ4に対し通常の(乖離情報が含まれない)プローブ情報が送信される。プローブ情報の送信後は、ステップS601に戻る。
【0039】
プローブ情報の送信タイミングでない場合には(ステップS601にてNo)、ステップS603にて、交通情報の配信要求を実行するタイミングかどうかが判断される。交通情報の配信要求を実行するタイミングでない場合には(ステップS603にてNo)、ステップS601に戻る。交通情報の配信要求を実行するタイミングになった場合には(ステップS603にてYes)、ステップS604にて、情報センタ4に対し交通情報の配信要求信号を送信する。次のステップS605では、情報センタ4から送信された交通情報を受信する。
【0040】
そして、ステップS606〜S609では、自車両2が走行している道路リンク毎の、自車両2の走行実績情報と交通情報センタ4から配信された交通情報との間の乖離の有無の判定の処理が行われる。ステップS606では、受信した交通情報及び地図データベース21の道路地図データから、道路リンク毎の旅行時間と距離とを求めて記憶すると共に、それら旅行時間と距離とから想定移動線L0(基準関数)が求められる。ステップS607では、道路リンク毎の自車両2の走行実績情報を示す車両移動線が求められて記憶される。
【0041】
ステップS608では、当該道路リンクにおいて、配信された交通情報と走行実績情報との間で乖離がある(大きい)かどうかが判断される。乖離がないと判断された場合には(ステップS608にてNo)、次のステップS609にて、同一の道路リンクかが判断され、道路リンクが変わったら(Yes)、次の道路リンクについて、ステップS606からの処理が繰返される。
【0042】
ここで、ステップS608における、本実施例の乖離の有無の判定の手法について、図4及び図5の具体例を参照しながら述べる。今、ある道路リンクについて、道路リンクの始点Sから終点Eまでの距離が300mであるとする。受信した交通情報から当該道路リンクの旅行時間が60秒と計算されると、横軸に始点S(0秒)からの時間経過、縦軸に始点Sからの走行距離をとって、平均速度5m/秒で、始点Sから終点Eまで走行すると仮定された基準走行距離(基準関数)が求められる。
【0043】
そして、基準走行距離に対し、乖離判定しきい値となる上限関数及び下限関数を設定する。本実施例では、上限関数及び下限関数として、前記想定移動線L0(基準関数)に対し、上下に所定の距離分だけ平行に離間する上限ラインL−H及び下限ラインL−Lとして夫々設定される。当該道路リンク内で、始点Sからの時間経過に伴う自車両2の走行実績情報による実際の走行距離(車両移動線)が、上限ラインL−Hを越えたとき、又は、下限ラインL−Lを下回った(至らなかった)ときに、乖離があると判定される。
【0044】
このとき、上限ラインL−Hは、経過時間60秒で、道路リンクの距離(300m)の例えば1.5倍の距離、即ち450m進んだ点Hを通る直線とされ、下限ラインL−Lは、経過時間60秒で、道路リンクの距離の例えば0.5倍の距離、即ち150m進んだ点Lを通る直線とされる。車両移動線が、上限ラインL−Hから上方に越えたとき、或いは、下限ラインL−Lを下回ったときに、乖離がある(大きい)と判断される。
【0045】
図4では、当該道路リンクの車両2の走行実績情報(時間経過に対する走行距離)において乖離があった場合を、車両移動線(走行実績情報)M1、M2の2種類について示している。車両移動線M1については、交通情報に応じた平均速度(想定移動線L0)よりも全体的に速く走行しており、A点で上限ラインL−Hを越えている。この場合、車両移動線M1が上限ラインL−Hを越えることは、先程まで渋滞していたものの、瞬く間にその渋滞が解消されたと考えられる。従って、A点において乖離があると判定される。
【0046】
また、車両移動線M2については、交通情報に応じた平均速度(想定移動線L0)よりも全体的に遅く走行しており、点Bで下限ラインL−Lを下回っている。この場合、車両移動線M2が、下限ラインL−Lを下回ることは、それまで比較的順調に流れていたものが急に渋滞が発生したと考えられる。従って、B点において乖離があると判定される。図示はしないが、車両移動線が、上限ラインL−Hと下限ラインL−Lとの間に収まっている場合には、その道路リンクにおいて乖離はないと判断される。
【0047】
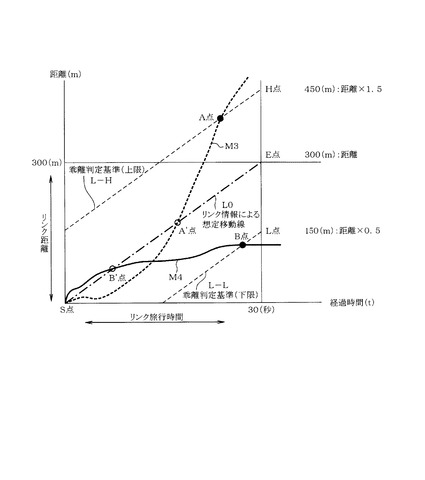
図5では、乖離があり、且つ、車両移動線が途中で想定移動線L0と交差している場合を、車両移動線(走行実績情報)M3、M4の2種類について示している。車両移動線M3については、当初は交通情報に応じた平均速度(想定移動線L0)よりも遅く走行していたが、A´点で想定移動線L0と交差するように次第に速度を上げて行き、A点で上限ラインL−Hを越え、以て、乖離があると判定される。車両移動線M4については、当初は交通情報に応じた平均速度(想定移動線L0)よりもやや速く走行していたが、B´点で想定移動線L0と交差するように次第に速度が下がって行き、点Bで下限ラインL−Lを下回り、以て、乖離があると判定される。
【0048】
図6に戻り、このように乖離があると判断されると(ステップS608にてYes)、ステップS610にて、情報センタ4に対し、プローブ情報に乖離情報を付加して送信することが行われる。このとき、本実施例では、図5に車両移動線M3、M4で例示したように、車両移動線M3、M4が想定移動線L0と交差した場合には、併せて、その交差点(図5ではA´点、B´点)の位置及び時間(時刻)のデータも送信される。プローブ情報及び乖離情報を送信した後には、ステップS601に戻る。
【0049】
これに対し、図6のステップS611〜S618は、交通情報センタ4側(交通情報予測処理部15)の実行する処理を示している。尚、交通情報プロバイダ5においては、ステップS619にて、交通情報センタ4に向けて例えば定期的に交通情報を配信している。交通情報センタ4では、ステップS611にて、交通情報プロバイダ5からの交通情報が受信される。これと共に、ステップS612にて、車両2(車載器3)から送信されるプローブ情報を受信する。受信するプローブ情報には、上記ステップS602において定期的に送信されるものと、ステップS610において送信される乖離情報が付加されたものとを含んでいる。
【0050】
プローブ情報を受信すると、次のステップS613にて、乖離情報が含まれているかどうかが判断される。受信したプローブ情報に乖離情報が含まれていない場合には(ステップS613にてNo)、ステップS614にて、上記交通情報プロバイダ5から得られた交通情報と、各車両2から受信したプローブ情報とに基づいて、5分毎の交通情報の加工が行われる。
【0051】
一方、受信したプローブ情報に乖離情報が含まれていた場合には(ステップS613にてYes)、ステップS615にて、複数の同一内容の乖離情報を受信しているかどうかが判断される。同一の道路リンクに関しての乖離情報を複数の車両2(車載器3)から受信している場合には(ステップS615にてYes)、ステップS616にて、当該道路リンクの交通情報が、それら乖離情報に基づいて修正(更新)される。尚、乖離情報を受信したものの、その乖離情報を送信したのが1台の車両2のみであった場合には(ステップS615にてNo)、その乖離はなかったものとみなされる。
【0052】
ステップS614にて交通情報を加工した後、あるいは更にステップS616にその交通情報を修正した後、上記ステップS604にて車両2(車載器3)から送信された配信要求信号を受信すると(ステップS617)、次のステップS618にて、最新の交通情報が、当該車両2に対して送信される。車両2(車載器3)側では、上記ステップS605にて、その交通情報を受信する。図示はしていないが、交通情報の送信後は、ステップS611に戻る。図示していないがS618の交通情報を配信は、S612のプローブ情報受信毎にしても良いシステムに変えることが出来る。
【0053】
このような本実施例の交通情報提供システム1によれば、車両2に搭載された車載器3と、各車両2から送信されるプローブ情報を収集して交通情報を生成し各車両2に配信する交通情報センタ4とを含んで構成されるシステムにあって、車載器3において、自車両2の走行実績情報と交通情報センタ4から配信された交通情報と間で乖離があると判定した場合に該交通情報センタ4に対して乖離情報を送信すると共に、交通情報センタ4側では、同一の道路リンクに関しての乖離情報を複数の車両2から受信することを条件に、当該道路リンクにおける交通情報を更新するように構成した。従って、交通情報センタ4において、誤った交通情報に更新してしまうことを極力防止し、交通情報センタ4が配信する交通情報と実際の道路状況とが異なっている場合に、信頼性の高い交通情報の更新を行うことができる。
【0054】
また本実施例では、乖離の有無を判定するにあたり、交通情報センタ4から受信した交通情報に応じた速度で道路リンク全体を走行した場合の想定移動線(基準関数)L0に基づいて、上限関数(上限ラインL−H)及び下限関数(下限ラインL−L)を設定し、実際の車両移動線が、上限ラインL−Hを越えたとき、又は、下限ラインL−Lを下回ったときに、乖離があると判定するように構成した。これにより、実際の道路状況の急激な変化を容易に判断することができ、しかも上限ラインL−H及び下限ラインL−Lを適切に設定することができる。
【0055】
しかも、車両移動線(M3、M4)が、想定移動線L0と交差している場合には、その交差点(A´点、B´点)の位置及び時間のデータをも併せて送信するように構成した。交差点の前後では、車両2の速度が大きく変動している、つまり、その交差点で車両2の流れが大きく変化しているということができるので、その交差点のデータをも併せて送信することによって、道路リンク内における車両2の流れの変化した場所や時間(時刻)を交通情報センタ4に知らせて、交通情報に反映させることができる。
【0056】
更に、特に本実施例では、車載器3が、プローブ情報を、所定時間経過毎又は自車両2が所定位置に到達したタイミングで送信すると共に、乖離があると判定されたタイミングで、プローブ情報に乖離情報を付加して送信するように構成したので、交通情報センタ4に対し、プローブ情報をこまめに送信することが可能となり、しかも、乖離情報を速やかに送信することができる。交通情報センタ4は、いわば鮮度の高い情報を収集し、それらプローブ情報及び乖離情報に基づいて交通情報を生成することができので、常に最新の交通情報を生成して車載器3に配信することができる。
【0057】
尚、上記実施例では、乖離の有無の判定を行うにあたり、道路リンクにおける時間経過と車両2の移動距離との関係を表す想定移動線L0に対して、平行に上限ラインL−H及び下限ラインL−Lを設定し、実際の車両移動線が、2つのライン間に収まるかはみ出すかどうかで乖離の判定を行うようにしたが、上限しきい値(上限ラインL−H)及び下限しきい値(下限ラインL−L)を、想定移動線L0に平行でなく、速度に対しそれぞれ所定値(たとえば1.5と、0.5)を乗算した速度に基づいて(傾きを変えて)設定したりすることもできる。
【0058】
上記実施例では、乖離の有無の判定を行うにあたり、道路リンクにおける時間経過に対する走行距離の値を用いるようにしたが、走行距離に代えて、到達地点の情報を採用するようにしても良い。或いは、道路リンクに対し、交通情報に基づいて想定される所定距離又は所定地点までの走行所要時間と、走行実績情報に基づく当該所定距離又は所定地点までの走行所要時間とが所定時間以上乖離しているかどうかを判定するように構成することもできる。
【0059】
乖離の有無の判断に上限関数及び下限関数を用いる場合には、それら上限関数及び下限関数を、車両2側或いは交通情報センタ4側で自在に設定可能に構成することもできる。交通情報センタ4側で設定する場合には、設定した上限関数及び下限関数が車両2側に配信される。これによれば、乖離の有無を判定する際のしきい値つまり判定基準を、自在に調整することが可能となり、実情にあった判定基準で乖離の有無を判断できるようになる。交通情報センタ4においては、乖離情報が頻発する道路リンクについては、必要に応じてデータベースに蓄積された交通関連情報を補正するようにしても良い。
【0060】
更には、上記実施例では、車載器3自体において、経路探索の処理を行うシステムを例としたが、車載器3から交通情報センタ4側に目的地データを送信して、情報センタ4側で経路探索を行い、その経路案内データを車載器3に返信するようにしたいわゆるセンタ計算形のシステムであっても良い。上記実施例では、交通情報センタ4は、同一の道路リンクに関して、複数台の車両2から乖離情報受信したときに、交通情報を更新するようにしたが、類似する乖離情報を所定台数以上の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新するようにすることもできる。
【0061】
また、車載器3がプローブ情報を送信する時間間隔や、交通情報センタ4が交通情報を作成(加工)する時間間隔などについても、5分は一例に過ぎず、より短くする(例えば1分間隔)ことにより、より一層きめの細かい交通情報の配信が可能となる。その他、車載器3のハードウエア構成などについても種々の変形が可能である等、本発明は、上記した実施例に限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施し得るものである。
【符号の説明】
【0062】
図面中、1は交通情報提供システム、2は車両、3は車載器、3aはナビゲーション機能、3bはプローブ機能、4は交通情報センタ、5は交通情報プロバイダ、14はプローブ情報受信部、15は交通情報予測処理部、16は交通情報配信部(通信手段)、17はデータ処理部(判定手段)、23は交通情報送受信機(通信手段)を示す。
【技術分野】
【0001】
本発明は、車両に搭載されナビゲーション機能及びプローブ機能を備える車載器と、その車載器と通信手段を介して接続可能な交通情報センタとを含んで構成される交通情報提供システムに関する。
【背景技術】
【0002】
この種の交通情報提供システムの一例として、特許文献1に記載されたものがある。このシステムでは、交通情報センタは、外部の交通情報収集源から交通情報を収集すると共に、プローブ機能を有する車両(プローブカー)から位置及び時刻に基づく走行履歴情報を受信して交通情報を編集し、車両側からの要求により、新しい交通情報を当該車両に送信する。そして、車両のナビゲーション装置は、交通情報センタから取得した交通情報(渋滞情報)に基づいて、目的地への到着予定時刻を算出したり、渋滞を回避する経路を探索して案内したりするようになっている。
【0003】
また、この特許文献1のシステムでは、車両と交通情報センタとの間の通信の頻度をできるだけ少なくするために、車両側において、過去に取得して格納された交通情報に基づいて予想した予想到着距離情報と、実際の走行履歴情報とを比較し、情報の乖離が大きいと判断した場合にのみ、交通情報センタと通信して、新たな交通情報を取得するようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−280320号公報(段落[0030]〜[0036]、図5)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の技術においては、車両側で、配信された交通情報と実際の状況との乖離が大きいと判断したときに、交通情報センタに対し、交通情報の要求と共にプローブ情報を送信するようにしている。従って、交通情報センタでは、そのプローブ情報に基づいて新たな交通情報を作成することが可能となる。しかし、その構成では、例えば車両のエンジンを切らずに買い物をした場合などは、交通情報センタで渋滞が起こっていると判断してしまうなど、情報の信頼性が低く、誤った交通情報を提供してしまう虞があった。また、車両側における、交通情報と実際の状況とが乖離しているかどうかの判断(ひいてはプローブ情報の送信)に、比較的長い時間(例えば15分)がかかり、情報の鮮度に劣る事情と渋滞から順調走行へ道路状況が急変しても対応できない事情もあった。
【0006】
本発明は上記事情に鑑みてなされたもので、その目的は、プローブ情報を収集して交通情報を生成するシステムにあって、交通情報センタが配信する交通情報と実際の道路状況とが異なる場合に、交通情報センタにおいて信頼性の高い交通情報の更新を行うことが可能な交通情報提供システムを提供するにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の交通情報提供システムは、車両に搭載され、自車位置を検出すると共に目的地までの経路案内を行うナビゲーション機能、及び、自車の位置情報を含むプローブ情報を送信するプローブ機能を備える車載器と、前記車載器と通信手段を介して接続され、各車両から送信されるプローブ情報を収集して交通情報を生成し、その交通情報を各車両に配信する交通情報センタとを含んで構成されるシステムであって、前記車載器は、自車が走行している道路リンク毎に、自車の走行実績情報と前記交通情報センタから配信された交通情報との乖離の有無を判定する判定手段を備え、この判定手段により乖離があると判定されたときに、当該交通情報センタに対して乖離情報を送信し、前記交通情報センタは、同一の道路リンクに関しての乖離情報を複数の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新するところに特徴を有する(請求項1の発明)。
【0008】
上記構成によれば、車載器において、判定手段により、自車の走行実績情報と交通情報センタから配信された交通情報との乖離の有無が判定され、乖離があると判定された場合には、交通情報センタに対して乖離情報が送信される。そして、交通情報センタは、その乖離情報に応じて交通情報を現状に合ったものに更新するのであるが、このとき、同一の道路リンクに関しての乖離情報を複数の車両から受信することを条件に、当該道路リンクにおける交通情報を更新する。従って、誤った交通情報に更新してしまうことを極力防止し、信頼性の高い交通情報の更新を行うことができる。
【0009】
本発明では、上記判定手段を、同一道路リンクに対し、前記交通情報に基づいて想定される所定距離又は所定地点までの走行所要時間と、前記走行実績情報に基づく当該所定距離又は所定地点までの走行所要時間とが所定時間以上乖離しているかどうかを判定するように構成することができる(請求項2の発明)。また、判定手段を、同一道路リンクに対し、前記交通情報に基づいて想定される所定時間経過後の走行距離又は到達地点と、前記走行実績情報に基づく当該所定時間経過後の走行距離又は到達地点とが所定値以上乖離しているかどうかを判定するように構成することもできる(請求項3の発明)。いずれも、リンク毎に、自車の走行実績情報と交通情報センタから配信された交通情報との乖離の有無を確実に判定することができる。
【0010】
より具体的には、前記判定手段を、前記交通情報に基づいて想定される速度で、前記道路リンクを始点から終点まで走行すると仮定した場合の、時間経過に対する走行距離又は到達地点の関係を表す基準関数に対し、時間経過に対する走行距離又は到達地点の乖離判定しきい値となる上限関数及び下限関数を設定し、当該道路リンク内で、始点からの任意の時間経過した際の、前記走行実績情報に基づく走行距離又は到達地点が、前記上限関数による走行距離又は到達地点を越えたとき、或いは、前記下限関数による走行距離又は到達地点に至らないときに、所定値以上乖離していると判定する構成とすることができる(請求項4の発明)。
【0011】
これによれば、道路リンクにおいて、始点からの時間経過に対する自車の実際の走行距離又は到達地点が、乖離判定しきい値となる上限関数による走行距離又は到達地点を越えたときには、先程まで渋滞していたものの、瞬く間にその渋滞が解消されたと考えられ、また、乖離判定しきい値となる下限関数による走行距離又は到達地点に至らないときには、順調に走行していたものが急に渋滞が発生したと考えられる。従って、判定手段によって、実際の道路状況の急激な変化を容易に判断することができる。
【0012】
さらにこのとき、前記上限関数及び下限関数を、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々各時間経過に関して常に一定の走行距離だけ離間するように設定したり(請求項5の発明)、或いは、前記上限関数及び下限関数は、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々所定値を乗算した値となるように設定したり(請求項6の発明)することができる。いずれも、上限関数及び下限関数を適切に設定することができる。
【0013】
このように、乖離の有無の判断に上限関数及び下限関数を用いる場合には、それら上限関数及び下限関数を、車両側で自在に設定可能に構成したり、或いは、前記交通情報センタ側で設定されたものが前記車載器に配信されるように構成したりすることができる(請求項7の発明)。これによれば、乖離の有無を判定する際の判定基準を、車両側或いは交通情報センタ側で自在に調整することが可能となり、実情にあった判定基準で乖離の有無を判断できるようになる。
【0014】
前記判定手段により乖離があると判定されたときに、当該道路リンク内の前記走行実績情報に基づく時間経過と走行距離又は到達地点との関係が、前記基準関数による時間経過と走行距離又は到達地点との関係を表す想定移動線と交差している場合には、その交差点の位置及び時間のデータをも併せて送信するように構成することができる(請求項8の発明)。道路リンク内での時間経過と走行距離との関係が、想定移動線と交差した場合には、その前後で車両の速度が大きく変動している、つまり、その交差点で車両の流れが大きく変化しているということができるので、そのデータをも併せて送信することによって、道路リンク内における車両の流れの変化した場所や時間(時刻)を交通情報センタに知らせることができる。
【0015】
また、本発明では、前記交通情報センタにおいては、同一の道路リンクに関して、類似する乖離情報を所定台数以上の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新するように構成することができ(請求項9の発明)、これにより、信頼性をより一層高めることができる。
【0016】
本発明においては、前記車載器が、前記乖離情報を前記プローブ情報に付加して送信するように構成することができる(請求項10の発明)。さらには、前記車載器が、前記プローブ情報を、所定時間経過毎又は自車両が所定位置に到達したタイミングで送信すると共に、前記判定手段により乖離があると判定されたタイミングで、前記乖離情報を含むプローブ情報を送信するように構成することができる(請求項11の発明)。これによれば、交通情報センタに対し、プローブ情報をこまめに送信することが可能となり、しかも、乖離情報を速やかに送信することができる。交通情報センタは、いわば鮮度の高い情報を収集し、それらプローブ情報及び乖離情報に基づいて交通情報を生成することができる。従って、常に最新の交通情報を生成して車載器に配信することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施例を示すもので、交通情報提供システムの全体構成を概略的に示すブロック図
【図2】車載器の電気的構成を概略的に示すブロック図
【図3】車載器のプローブ機能を示す機能ブロック図
【図4】乖離の有無の判定の手法を説明するための図(その1)
【図5】乖離の有無の判定の手法を説明するための図(その2)
【図6】車載器と交通情報センタとの間でのプローブ情報の送受信及び交通情報の送受信の処理手順を示すフローチャート
【発明を実施するための形態】
【0018】
以下、本発明を具体化した一実施例について、図面を参照しながら説明する。図1は、本実施例に係る交通情報提供システム1の構成を概略的に示しており、この交通情報提供システム1は、車両2に設けられた車載器(ナビゲーション装置)3と、交通情報センタ4と、交通情報プロバイダ5とを含んで構成されている。前記車載器3と交通情報センタ4との間は、例えば携帯電話網や無線LAN等の通信手段を介して接続可能とされている。また、交通情報センタ4と交通情報プロバイダ5との間も同様の通信手段または電話の専用回線やインターネット回線等の有線の通信手段を介して接続されている。
【0019】
尚、本実施例では、交通情報センタ4は、例えば「G−BOOK」等の会員制のものとなっており、車両2のユーザは、会員になることによって、交通情報センタ4からの交通情報を含む各種サービスを受けることができるシステムとされている。従って、図示はしていないが、会員となっているユーザの車両2(車載器3)は多数台が存在し、それら多数の車載器3が、夫々交通情報センタ4に対して通信(接続)可能とされている。
【0020】
図1に機能ブロックで示すように、前記交通情報プロバイダ5は、交通情報収集部6、交通情報加工部7、交通情報提供部8を有して構成されている。前記交通情報収集部6は、道路の各所に設けられたカメラ9及び車両感知器10、タクシープローブ11等から道路交通情報を収集する。前記交通情報加工部7は、それら収集した交通情報を加工し、交通情報提供部8は、前記交通情報センタ4を含む関係各所に、加工した交通情報を送信する。この場合、加工及び送信される交通情報は、所定時間間隔例えば5分間隔で更新されていくようになっている。
【0021】
前記交通情報センタ4は、前記交通情報プロバイダ5からの交通情報を受信する交通情報受信部12、道路地図データを記憶すると共に入手した交通情報を蓄積するデータベース13、後述する各車両2の車載器3から送信されたプローブ情報を受信するプローブ情報受信部14、各交通情報及びプローブ情報を総合的に処理して交通情報を予測(生成)する交通情報予測処理部15、生成した交通情報を各車両2(車載器3)に配信する交通情報配信部16を備えている。尚、周知のように、前記交通情報を蓄積するデータベース13に蓄積記憶されるデータは過去の交通情報で、例えば同じ曜日、同じ時間帯、同じ天候等に分割し、統計したデータの集合からなる。
【0022】
詳しくは後述するように、各車載器3は、車両2(自車)の走行実績情報と、配信された交通情報とが乖離していると判断した際には、プローブ情報と共に乖離情報を送信するようになっている。交通情報センタ4(交通情報予測処理部15)は、前記プローブ情報受信部14により受信したプローブ情報に乖離情報が含まれていた場合には、同一の道路リンクに関しての乖離情報を複数の車両2から受信したことを条件に、それら乖離情報に基づいて、当該道路リンクにおける交通情報を更新するようになっている。
【0023】
前記車載器3は、自車位置を検出すると共に目的地までの経路案内を行うナビゲーション機能3a、及び、自車の位置情報を含むプローブ情報を作成し前記交通情報センタ4に送信するプローブ機能3bを有している。図2は、この車載器3のハードウエア的構成を概略的に示している。この車載器3は、コンピュータ(CPU)を主体として構成され車載器3全体を制御するデータ処理部17を備えると共に、このデータ処理部17に以下のような各装置を接続して構成される。
【0024】
即ち、データ処理部17には、GPS用人工衛星からの電波を受信するGPS受信機18、車速センサ19.角速度センサ20、地図データベース21、VICS(登録商標)等の放送を受信して交通情報を得るFM受信機等の交通情報受信機22、電話や無線LAN等の通信手段から交通情報を得る交通情報送受信機23、記憶部24、液晶ディスプレイからなる表示部とタッチパネルやメカスイッチを含む操作部とを一体的に組込んだ表示ユニット25、合成音声等を出力するスピーカ26が接続されている。前記地図データベース21は、前記道路地図データやそれに付随する施設データ(目的地データ)等を記憶したDVDやハードディスク等の地図データ記録メディア及びそのデータを読出すためのドライブ装置から構成される。
【0025】
前記データ処理部17は、そのソフトウエア的構成(プログラムの実行)により、前記GPS受信機18、車速センサ19、角速度センサ20からの信号の入力に基づいて、自車両2の現在位置(絶対位置)、進行方向、速度や走行距離、現在時刻等を高精度で検出する(図3の現在位置検出部27)。そして、検出された自車両2の現在位置、及び、前記地図データベース21から得られる地図データに基づいて、表示ユニット25の表示画面に、道路地図と共に自車両2の現在位置及び進行方向を表示させるロケーションの機能を実現する。
【0026】
また、前記データ処理部17は、ユーザの表示ユニット25の操作部の操作により目的地が指定されると、車両2の出発地(現在位置)か指定された目的地までの推奨する走行経路(ルート)を、例えば周知のダイクストラ法を用いて自動的に計算し、求められた目的地までのルートを案内するルートガイダンスの機能を実現する。このルートガイダンスは、表示ユニット25の表示画面に、道路地図に重ね合わせて走行すべき経路を表示すると共に、スピーカ26から右左折の指示等の案内音声を出力することにより行われる。
【0027】
このとき、データ処理部17が経路探索を行うにあたっては、FM多重放送による交通情報の配信データ(現況の交通情報)を使用する方法も有るが、今後の交通情報を予測した前記交通情報センタ4(交通情報配信部16)から配信された最新の交通情報を、交通情報送受信機23(図3の交通情報受信部33)により受信する。この交通情報は、道路交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)や、気象情報(天候、風向き、路面状況)等のデータからなる。そして、その最新の予測した交通情報を利用して、目的地までに要する時間が最短となる経路を求めるようになっている。尚、このルートガイダンスでは、目的地への到着予測時刻を計算し、表示ユニット25の画面に表示することも行われる。
【0028】
そして、図3は、上記した車載器3のプローブ機能3bに関する機能ブロック図である。このプローブ機能3bは、上記車載器3のハードウエア的構成、及び、データ処理部17のソフトウエア的構成によって実現される。即ち、現在位置検出部27は、前記GPS受信機18のGPS信号、及びタイマー28からの信号に基づいて、車両2の現在位置(緯度、経度)を検出する。
【0029】
プローブ情報作成部29は、前記現在位置検出部27からの現在位置情報、タイマー28からの時刻情報、車両ID情報記憶部30からの車両ID情報に基づいて、自車両2の走行履歴(位置、速度、時刻等の履歴情報)からなるプローブ情報を作成する。また、後述するように、プローブ情報作成部29に、乖離判定部37から乖離情報が入力された場合には、プローブ情報に乖離情報が含まれるようになっている。
【0030】
プローブ情報送信条件判断部31は、プローブ情報を送信すべきタイミングであるか(送信条件が成立したか)どうかを判断する。本実施例で、プローブ情報の送信は、所定時間(例えば5分)経過毎、或いは所定距離(例えば5km)走行毎、及び、自車両2が所定位置(例えば高速道路のランプやジャンクションの2km手前)に至ったときのタイミングでなされると共に、後述の乖離判定部37が、乖離があると判定したタイミングでなされる。プローブ情報送信部32は、プローブ情報送信条件判断部31が、プローブ情報の送信タイミングと判断した際に、プローブ情報作成部29において作成されたプローブ情報を、交通情報送受信機23を介して交通情報センタ4に対して送信する。
【0031】
さて、本実施例では、後の作用説明にて詳述するように、車載器3のプローブ機能3bにおいて、上記のようなプローブ情報を作成し送信する処理を実行することに加えて、自車両2が走行している道路リンク毎に、自車両2の走行実績情報と交通情報センタ4から配信された交通情報との間の乖離の有無を判定し、乖離があると判定したときに、該交通情報センタ4に対し、プローブ情報と共に乖離情報を送信するようになっている。従って、データ処理部17が判定手段として機能する。
【0032】
図3には、プローブ機能3bにおける乖離の判断及び乖離情報の送信のための機能ブロック構成も併せて示している。交通情報受信部33は、交通情報センタ4の配信する交通情報を、交通情報送受信機23を介して受信する。旅行時間記憶部34は、得られた交通情報に基づいて、自車両2が走行する道路リンク毎の、旅行時間と距離とを求めて記憶する。想定移動線算出部35は、前記道路リンク毎の旅行時間と走行距離とから、想定移動線L0(図4、図5参照)を算出する。図4、図5に例示するように、想定移動線L0は、該当する道路リンクを、始点から終点まで、交通情報に応じて想定される速度(一定速度)で走行すると仮定した場合の時間経過に伴う基準走行距離(基準関数)を示す直線となる。
【0033】
一方、図3において、車両移動線計算部36は、前記車速センサ19や角速度センサ20から得られる距離信号と、前記現在位置検出部27から得られる現在位置情報に基づき、自車両2の道路リンクの実際の走行状況である走行実績情報、つまり走行中の道路リンクの時間経過と走行距離との関係を表す車両移動線M1〜M4(図4、図5参照)を算出する。乖離判定部37は、想定移動線算出部35からの想定移動線L0と、車両移動線計算部36が算出した車両移動線M1〜M4とから、乖離の有無を判定する。乖離の有無を判定する具体的な手法については、次の作用説明で述べる。
【0034】
この場合、乖離があるとは、該当する道路リンクにおいて、交通情報センタ4からの交通情報においては、渋滞発生中(或いは常に交通量が多く通過に時間が掛かる)とされていたものが、渋滞が解消されていた等、実際にはスムーズに走行できた場合や、逆に、交通情報センタ4からの交通情報においては渋滞の発生が無い(或いは常に交通量が少ない)とされていたものが、自車両2の走行時に、事故が発生した等、急に渋滞するようになったような場合を含んでいる。
【0035】
前記乖離判定部37が、乖離がある(乖離が大きい)と判定した場合には、上述のように、プローブ情報作成部29の作成するプローブ情報に当該乖離情報(乖離の種類(渋滞発生か解消か)、並びに位置、時刻等の情報)が含まれるようになる。乖離があると判断された時点で、プローブ情報送信条件判断部31がプローブ情報の送信タイミングと判断し、ローブ情報送信部32は、乖離情報が含まれたプローブ情報を、速やかに交通情報送受信機23を介して交通情報センタ4に対して送信する。
【0036】
そして、前記交通情報センタ4(交通情報予測処理部15)は、車載器3から受信したプローブ情報に乖離情報が含まれている場合には、同一の道路リンクに関しての乖離情報を複数の車両2(車載器3)から受信したことを条件に、その乖離情報に応じて当該道路リンクにおける交通情報を更新するようになっている。
【0037】
次に、上記のように構成された本実施例の交通情報提供システム1の作用について、図4〜図6も参照して述べる。図6のフローチャートは、前記車載器3及び交通情報センタ4(並びに交通情報プロバイダ5)の間で実行されるプローブ情報の送受信及び交通情報の送受信の処理手順を示している。まず、ステップS601からの、車載器3(車両2)側における処理について述べる。
【0038】
ステップS601では、プローブ情報の送信タイミングかどうかが判断される。この場合の送信タイミングは、前回のプローブ情報の送信から所定時間(例えば5分)が経過したかどうか(或いは所定距離(例えば5km)走行したかどうか)、及び自車両2が所定位置(例えば高速道路のランプやジャンクションの2km手前)に至ったかどうかで判断される。プローブ情報の送信タイミングになった場合には(ステップS601にてYes)、次のステップS602にて、情報センタ4に対し通常の(乖離情報が含まれない)プローブ情報が送信される。プローブ情報の送信後は、ステップS601に戻る。
【0039】
プローブ情報の送信タイミングでない場合には(ステップS601にてNo)、ステップS603にて、交通情報の配信要求を実行するタイミングかどうかが判断される。交通情報の配信要求を実行するタイミングでない場合には(ステップS603にてNo)、ステップS601に戻る。交通情報の配信要求を実行するタイミングになった場合には(ステップS603にてYes)、ステップS604にて、情報センタ4に対し交通情報の配信要求信号を送信する。次のステップS605では、情報センタ4から送信された交通情報を受信する。
【0040】
そして、ステップS606〜S609では、自車両2が走行している道路リンク毎の、自車両2の走行実績情報と交通情報センタ4から配信された交通情報との間の乖離の有無の判定の処理が行われる。ステップS606では、受信した交通情報及び地図データベース21の道路地図データから、道路リンク毎の旅行時間と距離とを求めて記憶すると共に、それら旅行時間と距離とから想定移動線L0(基準関数)が求められる。ステップS607では、道路リンク毎の自車両2の走行実績情報を示す車両移動線が求められて記憶される。
【0041】
ステップS608では、当該道路リンクにおいて、配信された交通情報と走行実績情報との間で乖離がある(大きい)かどうかが判断される。乖離がないと判断された場合には(ステップS608にてNo)、次のステップS609にて、同一の道路リンクかが判断され、道路リンクが変わったら(Yes)、次の道路リンクについて、ステップS606からの処理が繰返される。
【0042】
ここで、ステップS608における、本実施例の乖離の有無の判定の手法について、図4及び図5の具体例を参照しながら述べる。今、ある道路リンクについて、道路リンクの始点Sから終点Eまでの距離が300mであるとする。受信した交通情報から当該道路リンクの旅行時間が60秒と計算されると、横軸に始点S(0秒)からの時間経過、縦軸に始点Sからの走行距離をとって、平均速度5m/秒で、始点Sから終点Eまで走行すると仮定された基準走行距離(基準関数)が求められる。
【0043】
そして、基準走行距離に対し、乖離判定しきい値となる上限関数及び下限関数を設定する。本実施例では、上限関数及び下限関数として、前記想定移動線L0(基準関数)に対し、上下に所定の距離分だけ平行に離間する上限ラインL−H及び下限ラインL−Lとして夫々設定される。当該道路リンク内で、始点Sからの時間経過に伴う自車両2の走行実績情報による実際の走行距離(車両移動線)が、上限ラインL−Hを越えたとき、又は、下限ラインL−Lを下回った(至らなかった)ときに、乖離があると判定される。
【0044】
このとき、上限ラインL−Hは、経過時間60秒で、道路リンクの距離(300m)の例えば1.5倍の距離、即ち450m進んだ点Hを通る直線とされ、下限ラインL−Lは、経過時間60秒で、道路リンクの距離の例えば0.5倍の距離、即ち150m進んだ点Lを通る直線とされる。車両移動線が、上限ラインL−Hから上方に越えたとき、或いは、下限ラインL−Lを下回ったときに、乖離がある(大きい)と判断される。
【0045】
図4では、当該道路リンクの車両2の走行実績情報(時間経過に対する走行距離)において乖離があった場合を、車両移動線(走行実績情報)M1、M2の2種類について示している。車両移動線M1については、交通情報に応じた平均速度(想定移動線L0)よりも全体的に速く走行しており、A点で上限ラインL−Hを越えている。この場合、車両移動線M1が上限ラインL−Hを越えることは、先程まで渋滞していたものの、瞬く間にその渋滞が解消されたと考えられる。従って、A点において乖離があると判定される。
【0046】
また、車両移動線M2については、交通情報に応じた平均速度(想定移動線L0)よりも全体的に遅く走行しており、点Bで下限ラインL−Lを下回っている。この場合、車両移動線M2が、下限ラインL−Lを下回ることは、それまで比較的順調に流れていたものが急に渋滞が発生したと考えられる。従って、B点において乖離があると判定される。図示はしないが、車両移動線が、上限ラインL−Hと下限ラインL−Lとの間に収まっている場合には、その道路リンクにおいて乖離はないと判断される。
【0047】
図5では、乖離があり、且つ、車両移動線が途中で想定移動線L0と交差している場合を、車両移動線(走行実績情報)M3、M4の2種類について示している。車両移動線M3については、当初は交通情報に応じた平均速度(想定移動線L0)よりも遅く走行していたが、A´点で想定移動線L0と交差するように次第に速度を上げて行き、A点で上限ラインL−Hを越え、以て、乖離があると判定される。車両移動線M4については、当初は交通情報に応じた平均速度(想定移動線L0)よりもやや速く走行していたが、B´点で想定移動線L0と交差するように次第に速度が下がって行き、点Bで下限ラインL−Lを下回り、以て、乖離があると判定される。
【0048】
図6に戻り、このように乖離があると判断されると(ステップS608にてYes)、ステップS610にて、情報センタ4に対し、プローブ情報に乖離情報を付加して送信することが行われる。このとき、本実施例では、図5に車両移動線M3、M4で例示したように、車両移動線M3、M4が想定移動線L0と交差した場合には、併せて、その交差点(図5ではA´点、B´点)の位置及び時間(時刻)のデータも送信される。プローブ情報及び乖離情報を送信した後には、ステップS601に戻る。
【0049】
これに対し、図6のステップS611〜S618は、交通情報センタ4側(交通情報予測処理部15)の実行する処理を示している。尚、交通情報プロバイダ5においては、ステップS619にて、交通情報センタ4に向けて例えば定期的に交通情報を配信している。交通情報センタ4では、ステップS611にて、交通情報プロバイダ5からの交通情報が受信される。これと共に、ステップS612にて、車両2(車載器3)から送信されるプローブ情報を受信する。受信するプローブ情報には、上記ステップS602において定期的に送信されるものと、ステップS610において送信される乖離情報が付加されたものとを含んでいる。
【0050】
プローブ情報を受信すると、次のステップS613にて、乖離情報が含まれているかどうかが判断される。受信したプローブ情報に乖離情報が含まれていない場合には(ステップS613にてNo)、ステップS614にて、上記交通情報プロバイダ5から得られた交通情報と、各車両2から受信したプローブ情報とに基づいて、5分毎の交通情報の加工が行われる。
【0051】
一方、受信したプローブ情報に乖離情報が含まれていた場合には(ステップS613にてYes)、ステップS615にて、複数の同一内容の乖離情報を受信しているかどうかが判断される。同一の道路リンクに関しての乖離情報を複数の車両2(車載器3)から受信している場合には(ステップS615にてYes)、ステップS616にて、当該道路リンクの交通情報が、それら乖離情報に基づいて修正(更新)される。尚、乖離情報を受信したものの、その乖離情報を送信したのが1台の車両2のみであった場合には(ステップS615にてNo)、その乖離はなかったものとみなされる。
【0052】
ステップS614にて交通情報を加工した後、あるいは更にステップS616にその交通情報を修正した後、上記ステップS604にて車両2(車載器3)から送信された配信要求信号を受信すると(ステップS617)、次のステップS618にて、最新の交通情報が、当該車両2に対して送信される。車両2(車載器3)側では、上記ステップS605にて、その交通情報を受信する。図示はしていないが、交通情報の送信後は、ステップS611に戻る。図示していないがS618の交通情報を配信は、S612のプローブ情報受信毎にしても良いシステムに変えることが出来る。
【0053】
このような本実施例の交通情報提供システム1によれば、車両2に搭載された車載器3と、各車両2から送信されるプローブ情報を収集して交通情報を生成し各車両2に配信する交通情報センタ4とを含んで構成されるシステムにあって、車載器3において、自車両2の走行実績情報と交通情報センタ4から配信された交通情報と間で乖離があると判定した場合に該交通情報センタ4に対して乖離情報を送信すると共に、交通情報センタ4側では、同一の道路リンクに関しての乖離情報を複数の車両2から受信することを条件に、当該道路リンクにおける交通情報を更新するように構成した。従って、交通情報センタ4において、誤った交通情報に更新してしまうことを極力防止し、交通情報センタ4が配信する交通情報と実際の道路状況とが異なっている場合に、信頼性の高い交通情報の更新を行うことができる。
【0054】
また本実施例では、乖離の有無を判定するにあたり、交通情報センタ4から受信した交通情報に応じた速度で道路リンク全体を走行した場合の想定移動線(基準関数)L0に基づいて、上限関数(上限ラインL−H)及び下限関数(下限ラインL−L)を設定し、実際の車両移動線が、上限ラインL−Hを越えたとき、又は、下限ラインL−Lを下回ったときに、乖離があると判定するように構成した。これにより、実際の道路状況の急激な変化を容易に判断することができ、しかも上限ラインL−H及び下限ラインL−Lを適切に設定することができる。
【0055】
しかも、車両移動線(M3、M4)が、想定移動線L0と交差している場合には、その交差点(A´点、B´点)の位置及び時間のデータをも併せて送信するように構成した。交差点の前後では、車両2の速度が大きく変動している、つまり、その交差点で車両2の流れが大きく変化しているということができるので、その交差点のデータをも併せて送信することによって、道路リンク内における車両2の流れの変化した場所や時間(時刻)を交通情報センタ4に知らせて、交通情報に反映させることができる。
【0056】
更に、特に本実施例では、車載器3が、プローブ情報を、所定時間経過毎又は自車両2が所定位置に到達したタイミングで送信すると共に、乖離があると判定されたタイミングで、プローブ情報に乖離情報を付加して送信するように構成したので、交通情報センタ4に対し、プローブ情報をこまめに送信することが可能となり、しかも、乖離情報を速やかに送信することができる。交通情報センタ4は、いわば鮮度の高い情報を収集し、それらプローブ情報及び乖離情報に基づいて交通情報を生成することができので、常に最新の交通情報を生成して車載器3に配信することができる。
【0057】
尚、上記実施例では、乖離の有無の判定を行うにあたり、道路リンクにおける時間経過と車両2の移動距離との関係を表す想定移動線L0に対して、平行に上限ラインL−H及び下限ラインL−Lを設定し、実際の車両移動線が、2つのライン間に収まるかはみ出すかどうかで乖離の判定を行うようにしたが、上限しきい値(上限ラインL−H)及び下限しきい値(下限ラインL−L)を、想定移動線L0に平行でなく、速度に対しそれぞれ所定値(たとえば1.5と、0.5)を乗算した速度に基づいて(傾きを変えて)設定したりすることもできる。
【0058】
上記実施例では、乖離の有無の判定を行うにあたり、道路リンクにおける時間経過に対する走行距離の値を用いるようにしたが、走行距離に代えて、到達地点の情報を採用するようにしても良い。或いは、道路リンクに対し、交通情報に基づいて想定される所定距離又は所定地点までの走行所要時間と、走行実績情報に基づく当該所定距離又は所定地点までの走行所要時間とが所定時間以上乖離しているかどうかを判定するように構成することもできる。
【0059】
乖離の有無の判断に上限関数及び下限関数を用いる場合には、それら上限関数及び下限関数を、車両2側或いは交通情報センタ4側で自在に設定可能に構成することもできる。交通情報センタ4側で設定する場合には、設定した上限関数及び下限関数が車両2側に配信される。これによれば、乖離の有無を判定する際のしきい値つまり判定基準を、自在に調整することが可能となり、実情にあった判定基準で乖離の有無を判断できるようになる。交通情報センタ4においては、乖離情報が頻発する道路リンクについては、必要に応じてデータベースに蓄積された交通関連情報を補正するようにしても良い。
【0060】
更には、上記実施例では、車載器3自体において、経路探索の処理を行うシステムを例としたが、車載器3から交通情報センタ4側に目的地データを送信して、情報センタ4側で経路探索を行い、その経路案内データを車載器3に返信するようにしたいわゆるセンタ計算形のシステムであっても良い。上記実施例では、交通情報センタ4は、同一の道路リンクに関して、複数台の車両2から乖離情報受信したときに、交通情報を更新するようにしたが、類似する乖離情報を所定台数以上の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新するようにすることもできる。
【0061】
また、車載器3がプローブ情報を送信する時間間隔や、交通情報センタ4が交通情報を作成(加工)する時間間隔などについても、5分は一例に過ぎず、より短くする(例えば1分間隔)ことにより、より一層きめの細かい交通情報の配信が可能となる。その他、車載器3のハードウエア構成などについても種々の変形が可能である等、本発明は、上記した実施例に限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施し得るものである。
【符号の説明】
【0062】
図面中、1は交通情報提供システム、2は車両、3は車載器、3aはナビゲーション機能、3bはプローブ機能、4は交通情報センタ、5は交通情報プロバイダ、14はプローブ情報受信部、15は交通情報予測処理部、16は交通情報配信部(通信手段)、17はデータ処理部(判定手段)、23は交通情報送受信機(通信手段)を示す。
【特許請求の範囲】
【請求項1】
車両に搭載され、自車位置を検出すると共に目的地までの経路案内を行うナビゲーション機能、及び、自車の位置情報を含むプローブ情報を送信するプローブ機能を備える車載器と、
前記車載器と通信手段を介して接続され、各車両から送信されるプローブ情報を収集して交通情報を生成し、その交通情報を各車両に配信する交通情報センタとを含んで構成される交通情報提供システムであって、
前記車載器は、自車が走行している道路リンク毎に、自車の走行実績情報と前記交通情報センタから配信された交通情報との乖離の有無を判定する判定手段を備え、この判定手段により乖離があると判定されたときに、当該交通情報センタに対して乖離情報を送信し、
前記交通情報センタは、同一の道路リンクに関しての乖離情報を複数の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新することを特徴とする交通情報提供システム。
【請求項2】
前記判定手段は、同一道路リンクに対し、前記交通情報に基づいて想定される所定距離又は所定地点までの走行所要時間と、前記走行実績情報に基づく当該所定距離又は所定地点までの走行所要時間とが所定時間以上乖離しているかどうかを判定することを特徴とする請求項1記載の交通情報提供システム。
【請求項3】
前記判定手段は、同一道路リンクに対し、前記交通情報に基づいて想定される所定時間経過後の走行距離又は到達地点と、前記走行実績情報に基づく当該所定時間経過後の走行距離又は到達地点とが所定値以上乖離しているかどうかを判定することを特徴とする請求項1記載の交通情報提供システム。
【請求項4】
前記判定手段は、前記交通情報に基づいて想定される速度で、前記道路リンクを始点から終点まで走行すると仮定した場合の、時間経過に対する走行距離又は到達地点の関係を表す基準関数に対し、時間経過に対する走行距離又は到達地点の乖離判定しきい値となる上限関数及び下限関数を設定し、当該道路リンク内で、始点からの任意の時間経過した際の、前記走行実績情報に基づく走行距離又は到達地点が、前記上限関数による走行距離又は到達地点を越えたとき、或いは、前記下限関数による走行距離又は到達地点に至らないときに、所定値以上乖離していると判定することを特徴とする請求項3記載の交通情報提供システム。
【請求項5】
前記上限関数及び下限関数は、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々各時間経過に関して常に一定の走行距離だけ離間するように設定されることを特徴とする請求項4記載の交通情報提供システム。
【請求項6】
前記上限関数及び下限関数は、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々所定値を乗算した値となるように設定されることを特徴とする請求項4記載の交通情報提供システム。
【請求項7】
前記上限関数及び下限関数は、車両側で自在に設定可能とされる、或いは、前記交通情報センタ側で設定されたものが前記車載器に配信されることを特徴とする請求項4ないし6のいずれかに記載の交通情報提供システム。
【請求項8】
前記判定手段により乖離があると判定されたときに、当該道路リンク内の前記走行実績情報に基づく時間経過と走行距離又は到達地点との関係が、前記基準関数による時間経過と走行距離又は到達地点との関係を表す想定移動線と交差している場合には、その交差点の位置及び時間のデータをも併せて送信することを特徴とする請求項4ないし7のいずれかに記載の交通情報提供システム。
【請求項9】
前記交通情報センタは、同一の道路リンクに関して、類似する乖離情報を所定台数以上の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新することを特徴とする請求項1ないし8のいずれかに記載の交通情報提供システム。
【請求項10】
前記車載器は、前記乖離情報を前記プローブ情報に付加して送信することを特徴とする請求項1ないし9のいずれかに記載の交通情報提供システム。
【請求項11】
前記車載器は、前記プローブ情報を、所定時間経過毎又は自車両が所定位置に到達したタイミングで送信するように構成されていると共に、前記判定手段により乖離があると判定されたタイミングで、前記乖離情報を含むプローブ情報を送信するように構成されていることを特徴とする請求項1ないし10のいずれかに記載の交通情報提供システム。
【請求項1】
車両に搭載され、自車位置を検出すると共に目的地までの経路案内を行うナビゲーション機能、及び、自車の位置情報を含むプローブ情報を送信するプローブ機能を備える車載器と、
前記車載器と通信手段を介して接続され、各車両から送信されるプローブ情報を収集して交通情報を生成し、その交通情報を各車両に配信する交通情報センタとを含んで構成される交通情報提供システムであって、
前記車載器は、自車が走行している道路リンク毎に、自車の走行実績情報と前記交通情報センタから配信された交通情報との乖離の有無を判定する判定手段を備え、この判定手段により乖離があると判定されたときに、当該交通情報センタに対して乖離情報を送信し、
前記交通情報センタは、同一の道路リンクに関しての乖離情報を複数の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新することを特徴とする交通情報提供システム。
【請求項2】
前記判定手段は、同一道路リンクに対し、前記交通情報に基づいて想定される所定距離又は所定地点までの走行所要時間と、前記走行実績情報に基づく当該所定距離又は所定地点までの走行所要時間とが所定時間以上乖離しているかどうかを判定することを特徴とする請求項1記載の交通情報提供システム。
【請求項3】
前記判定手段は、同一道路リンクに対し、前記交通情報に基づいて想定される所定時間経過後の走行距離又は到達地点と、前記走行実績情報に基づく当該所定時間経過後の走行距離又は到達地点とが所定値以上乖離しているかどうかを判定することを特徴とする請求項1記載の交通情報提供システム。
【請求項4】
前記判定手段は、前記交通情報に基づいて想定される速度で、前記道路リンクを始点から終点まで走行すると仮定した場合の、時間経過に対する走行距離又は到達地点の関係を表す基準関数に対し、時間経過に対する走行距離又は到達地点の乖離判定しきい値となる上限関数及び下限関数を設定し、当該道路リンク内で、始点からの任意の時間経過した際の、前記走行実績情報に基づく走行距離又は到達地点が、前記上限関数による走行距離又は到達地点を越えたとき、或いは、前記下限関数による走行距離又は到達地点に至らないときに、所定値以上乖離していると判定することを特徴とする請求項3記載の交通情報提供システム。
【請求項5】
前記上限関数及び下限関数は、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々各時間経過に関して常に一定の走行距離だけ離間するように設定されることを特徴とする請求項4記載の交通情報提供システム。
【請求項6】
前記上限関数及び下限関数は、時間経過に対する走行距離又は到達地点が、前記基準関数による走行距離又は到達地点に対して、夫々所定値を乗算した値となるように設定されることを特徴とする請求項4記載の交通情報提供システム。
【請求項7】
前記上限関数及び下限関数は、車両側で自在に設定可能とされる、或いは、前記交通情報センタ側で設定されたものが前記車載器に配信されることを特徴とする請求項4ないし6のいずれかに記載の交通情報提供システム。
【請求項8】
前記判定手段により乖離があると判定されたときに、当該道路リンク内の前記走行実績情報に基づく時間経過と走行距離又は到達地点との関係が、前記基準関数による時間経過と走行距離又は到達地点との関係を表す想定移動線と交差している場合には、その交差点の位置及び時間のデータをも併せて送信することを特徴とする請求項4ないし7のいずれかに記載の交通情報提供システム。
【請求項9】
前記交通情報センタは、同一の道路リンクに関して、類似する乖離情報を所定台数以上の車両から受信したときに、その乖離情報に応じて当該道路リンクにおける交通情報を更新することを特徴とする請求項1ないし8のいずれかに記載の交通情報提供システム。
【請求項10】
前記車載器は、前記乖離情報を前記プローブ情報に付加して送信することを特徴とする請求項1ないし9のいずれかに記載の交通情報提供システム。
【請求項11】
前記車載器は、前記プローブ情報を、所定時間経過毎又は自車両が所定位置に到達したタイミングで送信するように構成されていると共に、前記判定手段により乖離があると判定されたタイミングで、前記乖離情報を含むプローブ情報を送信するように構成されていることを特徴とする請求項1ないし10のいずれかに記載の交通情報提供システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−109625(P2013−109625A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254955(P2011−254955)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]