
交通流計測システム
【課題】
レーザセンサを用いて、測距データから走行車線上の車両の速度と測距された車両の交通流を計測する。
【解決手段】
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、各測距部に対応して、測距部で取得された測距データから車両の位置を検知する検知部と、各測距部により取得された、レイヤ対応の距離データとエコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、検知部で検知された車両に関するデータを表示する表示部を有する。データ処理部は、三次元座標データを用いて同一車両かを判断し、同一車両と判断した場合、車両に同一の固有IDを付与し、同一と判断された車両の速度データ、距離データを同一の固有IDに対応付けてポイントデータDBに記憶する。
レーザセンサを用いて、測距データから走行車線上の車両の速度と測距された車両の交通流を計測する。
【解決手段】
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、各測距部に対応して、測距部で取得された測距データから車両の位置を検知する検知部と、各測距部により取得された、レイヤ対応の距離データとエコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、検知部で検知された車両に関するデータを表示する表示部を有する。データ処理部は、三次元座標データを用いて同一車両かを判断し、同一車両と判断した場合、車両に同一の固有IDを付与し、同一と判断された車両の速度データ、距離データを同一の固有IDに対応付けてポイントデータDBに記憶する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交通流計測システムに係り、特にレーザビームを計測領域に照射して得られる距離データの位置や距離等から、走行中の車両の時速や車両の台数を検知して交通流を計測し、更に計測状況における車両等の画像を取得することが可能な交通流計測システムに関する。
【背景技術】
【0002】
レーザセンサによるレーザビームを利用して計測領域を走行する車両を測距し、得られる距離データから車両の時速や交通流を計測する技術が知られている。
例えば、特許文献1には、対象となる車両が通行する検出領域に対して、その上方位置から検出領域内の計測対象位置に向けてレーザビームを照射し、車両の進行方向と直交方向に対して、一定角度だけ傾けた走査方向に走査することにより、受信される反射信号の遅延時間に基づいて、検出対象までの距離と車両の進行方向の検出距離情報を分離し、その車両の進行方向に沿った成分から外形形状を認識し、走査方向に対する走査毎に得られる距離検出情報から検出対象物の特徴点の移動を検出して、そのときの車両の時速を計測する技術が開示されている。
【0003】
また、特許文献2には、可搬型の交通流計測装置において、電波ビームの範囲内に計測当該車両が進入したことを、送信ゲート信号と受信ゲート信号の時間間隔を計測して電波を送信し、計測当該車両の受信ドップラ信号が無くなったことを検知して、計測対象車が電波ビームより退出したことを判定して電波を停止することで、自動的に電波の送信及び停止し、交通流の計測が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−203588号公報
【特許文献2】特開2004−301587号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の装置は、検出領域内における車両の通行速度を検出し、少なくとも車両の先頭部分あるいは後尾部分が通過するときに、その車両の特徴点を抽出からその速度を計測する。そのため、計測に際しては、当該車両の先頭、若しくは後尾の部分を測距できる位置へのセンサの設置と、当該車両が計測点を通過する必要があり、走行車線の遠方から経時的に(複数回の)速度計測をすることができないと言う課題がある。
【0006】
また、特許文献2に記載の装置は、電波ビームを用いて、計測当該車両の進入、退出を検知するが、計測当該車両がこれまでの走行車線から外れて他の走行車線へ車線変更した場合、距離データから求められる移動距離に誤差を生じる可能性から、車両の時速計測では誤差を生じる可能性が、更に交通流計測では、車両の台数に誤差を含んだ計測値になると言う課題がある。
【0007】
本発明の目的は、上記課題に鑑み、複数のレイヤを形成する複数のレーザビームにより取得される距離データから物体の特徴点を検知して車両を認識し、かつ遠方向から車両を捉えながら正確な車両の速度や、車両の台数から交通流を計測することができる交通流計測システムを提供することにある。
【課題を解決するための手段】
【0008】
本発明の交通流計測システムは、好ましい例では、レーザセンサのレーザビームの照射によって計測領域から取得される測距データを用いて、車線を走行する車両までの距離を計測し、車両の速度や車両台数を計測する交通流計測システムであって、
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、
該各測距部に対応して、該測距部で取得された測距データから車両の位置を検知する検知部と、
該測距部により取得された、距離データ及びエコーデータを含む測距データをレイヤ対応に記憶する測距データDBと、
該各測距部により取得された、レイヤ対応の該距離データと該エコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、
該データ処理部によって統合処理された距離データと、演算された速度データと、三次元座標データを記憶するポイントデータDBと、
該検知部で検知された車両に関するデータを表示する表示部を有し、
該データ処理部は、該ポイントデータDBに記憶された三次元座標データを用いて、同一車両かを判断し、同一車両と判断した場合には該車両に同一のIDを付与し、
該ポイントデータDBは、該同一のIDに対応付けて、同一と判断された該車両の速度データ、該距離データを記憶し、該表示部は、該データ処理部で同一車両と判断された車両の速度データを表示することを特徴とする交通流計測システムとして構成される。
【0009】
好ましい例では、更に、計測領域内の車線上を走行する車両の画像データを取得する画像取得部を有し、前記データ処理部が、演算した車両の速度が所定の速度を超過している判断した場合、該画像取得部によって取得された車両を含む画像データと、該車両の該速度とを関連付けて、該表示部に表示する。
【0010】
また好ましい例では、更に、車両の交通流に関するデータを記憶する交通流データDBを有し、前記データ処理部は、前記ポイントデータDBを検索して、指定された時間間隔に関して該当する固有IDの車両のデータを得て、該固有IDが付与された車両の数を合計して車両台数を求め、求めた車両台数のデータを該交通流データDBに記憶する。
【発明の効果】
【0011】
本発明の交通流計測システムによれば、複数のレイヤを形成する複数のレーザビームにより取得される距離データから物体の特徴点を検知して車両を認識し、かつ遠方向から車両を捉えながら正確な車両の速度や、車両の台数から交通流を計測することができる。
【図面の簡単な説明】
【0012】
【図1】一実施例における交通流計測システムの構成を示す図。
【図2】一実施例における遠方の車両の距離データと画像を取得する例を示す図。
【図3】一実施例における複数のレイヤによる車両端の位置情報の取得を説明するための図。
【図4】一実施例における車両接近による複数レイヤにおける測距位置の変化を示す図。
【図5】一実施例における車両の時速演算の処理動作を示すフローチャート。
【図6】一実施例における複数レイヤのレーザビームの照射イメージを示す図。
【図7】一実施例における複数レイヤのレーザビームの照射と解像度の関係を示す図。
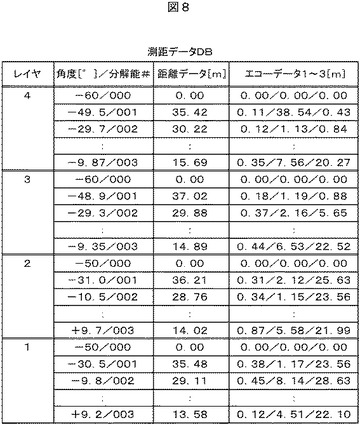
【図8】一実施例における測距データDBのフォーマットを示す図。
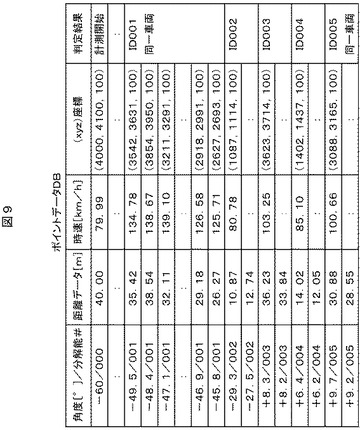
【図9】一実施例におけるポイントデータDBのフォーマットを示す図。
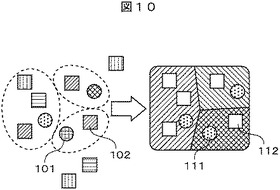
【図10】一実施例における距離データとエコーデータの関係を示す概念図。
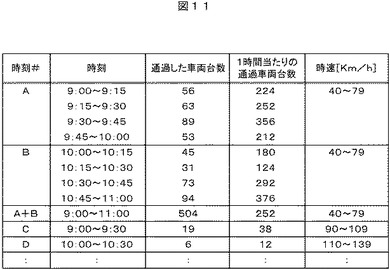
【図11】一実施例における交通流データDBのフォーマットを示す図。
【発明を実施するための形態】
【0013】
以下、本発明の好適な実施例について、図面を参照して説明する。
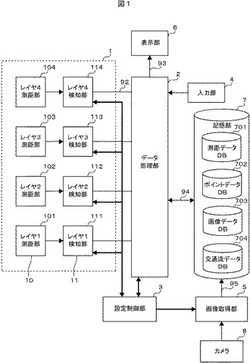
図1は、一実施例における車両の時速計測をする交通流計測システム構成を示す。
この交通流計測システムは、路面から垂直方向に、レーザビームが複数レイヤ(この例では4つの照射面)を形成するように、4本のレーザビームを照射するレーザセンサ1を有する。レーザセンサ1は、4本のレイヤから照射するレーザビームにより距離データを含む測距データを得る測距部101〜104(総じて10と示す)と、各レイヤの測距部10に対応して、走行車線上の車両などの物体を検出する検知部111〜114(総じて11と示す)を有する。
【0014】
更に、交通流計測システムは、検知部11から得られた測距データ(距離データ)92を用いて車両の時速を演算し、また車両の速度や交通流のデータを表示部6に表示するためのデータ処理を行うデータ処理部2と、レーザセンサ1の検知部11の設定やレーザセンサの制御を設定する設定制御部3と、管理者等によって操作され、設定制御部3やデータ処理部2に対する指示やデータの入力をする入力部4と、レーザセンサ1と車両との距離が予め設定された条件となった場合に、カメラ8で計測領域の画像データ95を撮影して取得する画像取得部5と、設定制御部3において設定された制御情報やデータ処理部2で演算された車両の時速や画像取得部5で取得した画像を、表示データ93として表示する表示部6と、本システムで取得される測距データ92、車両の速度や、通過車両台数の演算結果94、及び車両の画像データ95を記憶する記憶部7を有して構成される。記憶部7は、測距データDB701と、時速データを記憶するポイントデータDB702、及び画像データDB703、交通流データDB704を有している。
【0015】
データ処理部2は、測距部10により測距され、検知部11にて検出された車両までの距離に基づき、車両の現在位置を演算し、この演算結果94と一段階前に演算される同一車両の位置データとを対応づけて車両の走行軌跡を認識する。この認識結果は、記憶部7に記憶され、また必要に応じて各種の制御装置(後述)に出力される。
車両の時速計測に関しては、車両の形状を連続する点の集まりの座標値であるポイントデータとして認識して、測距する車両の大きさやその移動方向に一定の条件を設けることで、レーザセンサから車両までの距離を求めることができる。この距離データから車両の時速を演算することが可能となる。
特に、車両の前面の両端、若しくは片端部分の位置データを経時的に監視することで、車両の走行車線を的確に把握することができると共に、車両が走行車線を移動した場合でも、両端又は片端部分の位置データに基づいて、車両までの距離を求めることが可能であり、車両の時速を正確に計測することが可能となる。
【0016】
本実施例の特徴の1つとして、車両の距離データの他にエコーデータを取得することがあげられる。エコーデータは、マルチターゲット機能として、レーザビーム毎に最大3つのエコーを認識評価が可能であり、出力電圧を閾値に基づいてシステムノイズとエコーデータを分離して取得することができる。エコーデータは、距離データと同様にレーザセンサが複数のレイヤごとに物体を検知し、測距における変化が生じれば、何らの設定や処理を伴わずにその取得が可能である。
【0017】
3つのエコーデータをエコーデータ1〜3とすると、エコーデータ1は、例えば、レーザビームが照射されるガラス板に近い空間では、短時間に高電圧の変化を捉える。エコーデータ2は、対象物体までの間の空間では、例えば、雨粒などを短時間の微小電圧を捉える。エコーデータ3は、対象物体に最も近い空間では、比較的長時間での高電圧を捉えることで分離してエコーデータを認識する。
本実施例において、レーザセンサによるエコーデータ1〜3は、経時的な計測において毎回取得できるとは限らず、経時的に測距する中で対象物体が存在した以降、それを検知した場合のみエコーデータが取得され、かつ測距における変化を取得することができる。
【0018】
図10に示すように、ある分解能における距離データ101とエコーデータ102は、同等に取扱われてポイントデータの生成に使用され、物体の認識に利用される。データ処理部2は、測距データDB701に記憶された、レイヤごとの距離データとエコーデータについて、例えば距離データ(35.42m)とエコーデータ(38.54m)を同一物体のポイントデータとして認識して、イメージのクラスタ処理にて角度分解能#001として統合して距離データ111と、エコーデータ112として認識することができる。
【0019】
複数レイヤのレーザビームを利用した本実施例による物体の計測を、従来の近距離を捉えた単一のレイヤのみのレーザビームによる計測と比較すると、従来のレーザビームの照射角(例えば、180°や270°)に対して、本実施例では垂直方向に複数のレイヤでの照射角は110°(−60〜+50°の範囲)に絞られるので、レーザビームの照射距離が40m以上200m程度まで伸びることになり、より遠方の物体を捉えることが可能となる。カメラのレンズに例えれば、レーザビームの照射角度と照射距離に関する物体検知は、従来は広角〜標準レンズで物体を捉えるが、本発明では中程度の望遠レンズを固定して遠方の物体に照準を合わせ、物体を捉える計測と類似したものとなる。
【0020】
本実施例において、設定制御部3は、解像度0.5°では1°のピッチで、解像度0.25°では0.5°のピッチで、解像度0.125°では0.25°のピッチで、レイヤ4,3とレイヤ2,1をインターレース方式により順番に走査するように制御する。更に、設定制御部3は、4本のレイヤのうち上側の2本のレイヤ4,3(Lv4,3)(走査角度範囲:−60°〜+35°)と、下側の2本のレイヤ2,1(Lv2,1)(走査角度範囲:−50°〜+50°)とをペアにして、ずらして交互にレーザビームを照射するようにレーザセンサ1を制御する。走査角度範囲が(−50°〜+35°)の範囲で複数のレイヤ4〜1のスキャンレベルが揃い、各レイヤが−60°〜+50°の範囲をスキャンすることになる。これにより、全体の解像度に拡げて領域の解像度を2倍とすることが可能である(図6参照)。
【0021】
データ処理部2は、各レイヤ対応の検知部11が検知した距離データと、レイヤ4〜1ごとの角度分解能と、最大3つのエコーデータをそれぞれ対応付けて、測距データDB701(図8)に記憶する。例えば、4本のレイヤからは、車両を捉えたレイヤを選択する動作(図7)によって、全体の解像度の拡大をすることができる。
データ処理部2は、更に、測距データDB701に蓄積されたレイヤ4〜1ごとの距離データ及びエコーデータを用いて、対象の車両の速度を演算して、レイヤ、エコーからの測距データ統合による車両のポイントデータと、車両の速度と、座標変換データをポイントデータDB702(図9)に記憶する。更に、ポイントデータDB702に記憶された車両の時速データを読み出して、車両ごとに表示部6に表示する。
【0022】
ここで、レイヤ、エコーからの測距データ統合とは、計測領域で物体を検知するため、各レーザセンサからの測距データを重ね合わせて各レーザセンサを原点とした1つの(xyz)座標変換する処理をいう。詳しくは、フレーム時間毎に任意の座標を原点とし、その原点からの各レーザセンサの座標、及びセンサの傾き(ピッチ角、ロール角、ヨー角)を考慮した座標をポイントデータに変換することであり、複数のレーザセンサで測定している空間を1つの(xyz)座標に統合するものである。これにより、計測領域においてレーザセンサでの距離データやエコーデータのズレや不一致をキャリブレーション補正した測距データを得ることができる。
【0023】
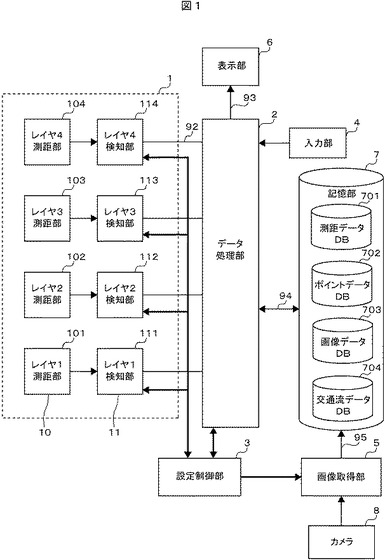
図2は、遠方の車両の距離データと画像を取得する例を示す。
2車線ある走行車線201を走行する車両203への測距において、レーザセンサ1の複数レイヤから車両203までの距離が、例えばレーザセンサの測距可能な距離40m以下になると、レーザセンサ1の複数のレイヤ4〜1内、車両203の位置を測距できるレイヤが生じることから、この地点から経時的に車両の距離データを取得しながら時速を計測することができる。また、走行車線201のレーザセンサ1の近傍に設置されたカメラ8により、走行状況の画像取得をする測定ポイント202に到達時点で取得することができる。レーザセンサ1で取得された測距データは測距データDB701に格納され、画像データは画像データDB703に格納される。
【0024】
[演算例1]
次に、データ処理部2による車両の時速の演算方法について説明をする。
例えば、測距における計測周波数12Hzとし、レーザセンサから当該車両の距離を移動車両の位置データから計測する。この場合、計測値が移動前:33.1m、移動後:36.1mとすると、その差分の距離から移動距離を求めると、
移動距離=移動後の計測値−移動前の計測値 ・・・(1)
=36.1m−33.1m=3.0m
となる。
(1)式の移動距離から計測周波数(12Hz)における速度を求めると、
速度=距離×周波数(÷時間) ・・・(2)
=3.0m×12Hz≒36.0m/s
となる。
これを時速に換算すると、
時速=36.0m/s×3600s≒130km/h ・・・(3)
となり、(3)から、時速130km/hであることが分かる。
【0025】
[演算例2]
計測周波数の間隔にて測距値が得られることで、車両の時速計測が可能となるが、計測周波数の間隔毎にて測距データが得られない場合においても、数ピッチ間隔後に測距データが得られれば、数ピッチ後に測距されるまでの平均値として、車両の時速の計測が可能となる。
例えば、ある任意の2点間の測距データが移動前:33.1mと移動後:41.5m、周波数(時間)12Hzの計測で移動前〜移動後で1ピッチ〜4ピッチ目とすると、(1)式より移動した移動距離を求めると、
移動距離=41.5m−33.1m=8.4m ・・・(4)
計測ピッチ間隔=4ピッチ目−1ピッチ=3ピッチ
となる。
この2点間の計測周波数の計測ピッチ間隔では、(4)の移動距離からピッチ間の平均移動距離を求めると、
平均移動距離=8.4m÷3ピッチ≒2.8m
となり、(2)式からピッチ間の平均速度を求めると、
平均速度=2.8m×12Hz≒33.6m/s
となる。これを平均時速に換算すると、
平均時速=33.6m/s×3600s≒121km/h ・・・(5)
となり、(5)から移動前後の区間を平均時速121km/hで走行したことが計測される。また、移動距離から物体の速度を時速換算して計測時間を以て平均時速121km/hが求められる。このように、車両までの任意の2点間の距離データを用いて、車両の時速を演算することができる。
【0026】
[演算例3]
ここで、本実施例による車両の時速計測における精度について確認をする。例えば、レーザセンサの測距による距離の誤差が±10cmの場合、移動距離と時速の誤差を求める。
上述の(3)の演算結果から、移動距離は前述の(1)式、測距データの距離の誤差について(2),(3)を用いて演算すると、
(a)時速130km/hでは、移動距離3.0mであり、
距離の誤差−10cmでは、移動距離2.9m、時速126km/hとなり、
距離の誤差+10cmでは、移動距離3.1m、時速134km/hとなる。
そして、
(b)時速100km/hでは、同移動距離2.3mであり、
同誤差−10cmでは、同距離2.2m、時速96km/hとなり、
同誤差+10cmでは、同距離2.4m、時速104km/hとなる。
更に、(c)時速60km/hでは、同移動距離1.39mであり、
同誤差−10cmでは、同距離1.29m、時速56km/hとなり、
同誤差+10cmでは、同距離1.49m、時速64km/hとなる。
各速度帯の演算による時速は、(a)126〜134、(b)96〜104、(c)56〜64km/hであることから、レーザセンサの測距による誤差から演算される時速計測は、±4km/hの誤差範囲の精度であることが分かる。
【0027】
次に、交通流の計測について説明する。
[計測例1]
交通流データとは、単位時間当たりに計測領域を通過する車両の台数をいう。本実施例では任意に設けた計測領域の走行車線についてレーザビームを照射して、交通流を計測し、1時間当たりの通過車両の台数や、一定速度以上での通過車両の台数について測定する。交通流の測定は、測定位置xを固定して実施する。ここで、1時間当たりの通過車両の台数の測定について説明をする。
入力部4により測定時間が指定される。データ処理部2は、ポイントデータDB702を検索して、指定された時間間隔に関して該当する固有IDの車両のデータを全て得て、固有IDが付与された車両の数を合計して車両台数を求める。そして、求めた車両台数を表示部6に表示すると共に、指定時間ごとに求めた演算結果(通過台数、単位時間当たりの台数、及び車両の時速)94を交通流データDB704に記憶する。
図11に交通流データDB704の例を示す。例えば、測定の時刻#A+Bまでを対象にした測定で、通過した車両台数が得られた場合の1時間当たりの通過車両の台数は、測定時刻A、時刻Bでの通過した車両台数の総和÷2から演算され、(261+243)÷2=252台として求められる。
【0028】
[計測例2]
ここでは、一定速度以上での通過車両の台数の測定について説明する。
車両速度は、任意の2点間における距離データに基づいて演算されるため、測定の基準位置手前に測定開始ポイント(図示しない)を設けておき、基準位置にて当該車両が走行する車線において車両速度を演算する。
データ処理としては、前述の1時間当たりの通過車両の台数の測定の処理に加えて、入力部4により測定する速度範囲として時速を設定しておく。データ処理部2は、ポイントデータDB702の判定結果にて、固有IDが付与された車両の時速を演算し、設定の速度範囲にある車両の台数を計数して、その結果を表示部6に表示する共に、演算結果94を記憶部7の交通流データDB704に記憶する。
【0029】
交通流は、走行車線201について時間当たり、又は車線当たりなどの一定条件に走行する車両203の流量を計測することで、交通渋滞や騒音や排出ガスによる大気汚染を軽減する対策などに利用される。先述の通り、車両を特定するため物体IDを付与して経時的に監視する方法の他、計測ポイント202において、最上のレイヤ4を大型車両の高さ(例えば、3.0m)に設定し、これが測距される車両の台数や、車線を計測する方法が考えられる。これは、レーザセンサ1を走行車線201に沿って設置し、常設にて長期に俯瞰する計測方法も有る。
例えば、一般道における車両の時速計測の場合、レーザセンサから対向位置に反射物を設置できる場合は、走行車線が決められた高速道路と同様、予め背景データの取得が可能となる。制約条件がある場合は、車線を示す白線や黄色線の位置を予めレーザセンサにて測距して、これを車両の時速計測する計測領域の目安値とする方法がある。
【0030】
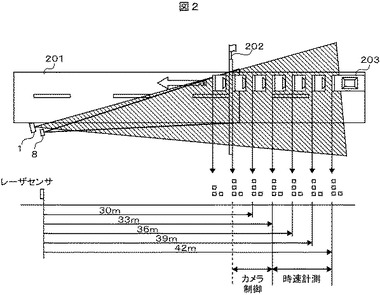
次に、図3を参照して、複数のレイヤによる車両の端を捉えた位置データの取得について説明する。
(A)は、計測対象の車線を走行する車両を遠方向から捉えたイメージである。これは、車両の測距対象領域である走行車線の背景データとして予め取得することで、走行車線を通過した車両を的確に捉えることができる。
(B)は、走行車線を走行する車両についてレーザセンサの複数レイヤにおけるレーザビーム照射のイメージである。走行車線301を走行する車両を経時的に測距する場合、複数レイヤの照射位置は、レーザセンサから車両までの距離により位置が経時的に変化する。例えば、レイヤ2にて車両の車両端を捉える水平位置にレーザビームを照射することを想定する。
(C)は、車両の片端を捉えて測距する場合の複数レイヤによるレーザビーム照射のイメージである。走行する車両を経時的に測距する場合、車両が走行車線301を左右に移動することを想定した位置情報の取得ポイントを示す。
車両端の測距データを経時的に監視することで、走行車線301を的確に把握できると共に、車両が走行車線301を移動したことを検知した場合でも、車両端の測距データに基づいて、車両の動きに追従してその車両の時速を演算することが可能である。
【0031】
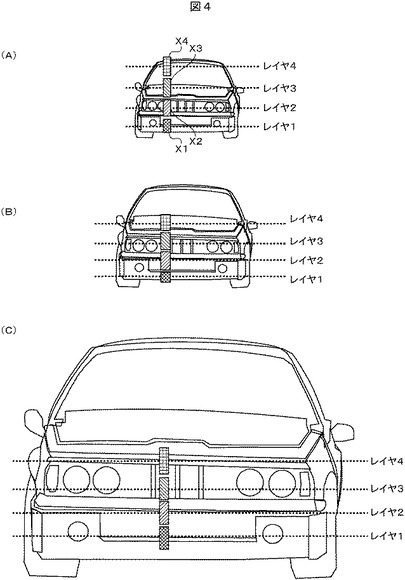
図4は、車両接近によるレイヤ4〜1の測距位置の変化を示す。
この例は、走行する車両の時速計測に際して、路面よりレイヤ4〜1を割り付け、4本のレイヤを有するレーザセンサを用いて、レイヤの位置が変化する様子を示す。図中の各レイヤ上の四角X4〜X1は、各レイヤが高さ方向において検知する車両への位置幅を示したもので、車両を測距するためにレーザビームを照射する位置や角度によって幅は異なってくる。
図中(A)〜(C)は、4本のレイヤを有するレーザセンサに向かって車両が接近する場合の測距されるレイヤ位置が経時的に変化する様子を示す。
(A)は、車両を検知した最初の状態を示す。レーザセンサ1、カメラ8に対して、車両203は、レーザセンサ1の計測可能範囲として40mを想定した遠方にあり、路面に近いレイヤ1は車両の位置を捉え、レイヤ4は車両の上空を捉えている。そして、経時的な測距によってレイヤ3は車両全面からボンネットの位置を、レイヤ2は車両端を捉えている。
(B)は、車両が前進した状態を示す。レイヤ4は車両全面からボンネットの位置を捉え、レイヤ3は車両全面を捉えている。また、レイヤ2は車両端を捉え、レイヤ1は車両下部を捉えている。この時点まで、レイヤ2によって車両の両端、若しくは片端の位置が測距されており、車両の幅についてのデータを採取することができる。
(C)は、更に車両が前進した状態を示す。レイヤ4,3は車両全面からボンネットの位置を捉え、レイヤ2,1は車両端を捉えている。この時点で、レーザセンサ1の近傍に設けられるカメラ8により、走行状況の画像取得をする測定ポイント202に到達時点で画像が取得できる。
このように、車両が当初の走行車線から隣の走行車線へ移動しても、レイヤ2が車両端を捉えていることで車両の移動後の位置を把握することができる。そのため、対象とする車両を正しく認識して、その車両の時速を計測することが可能となる。
【0032】
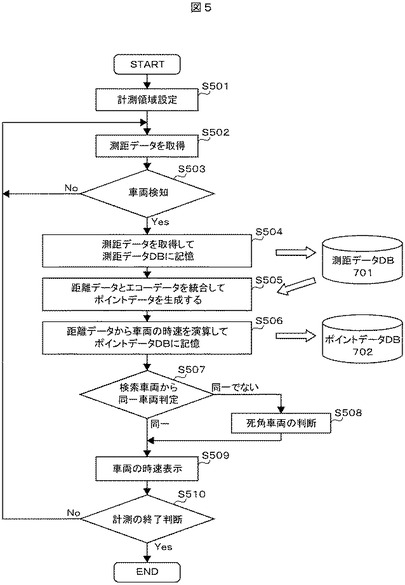
次に、図5のフローチャートを参照して、車両の時速演算の処理動作について説明する。
先ず、路面から高さ方向にレイヤ4〜1を有するレーザセンサ1を対象とする計測場所(車線が見渡せる場所)に設置し、初期設定として、計測領域(即ち距離計測範囲)の設定、測距条件や計測方法などの設定を行う(S501)。この設定は、管理者が入力部4から必要なデータ及び指示を入力すると、設定制御部3がレーザセンサ1の測距部10および検知部11の条件を設定することで行われる。
【0033】
次に、レーザセンサ1が駆動して測距を開始すると、4本のレイヤ4〜1から走行車線の方向に向けてレーザビームが照射されて、4つの各測距部10は、計測領域を走行する車両及びその周辺及び前面から、距離データ及びエコーデータを含む測距データを取得する(S502)。
各検知部11は、取得した測距データから計測領域内に車両が検知されたかを判断する(S503)。判断の結果、車両が未検知の場合はS502へ遷移して測距データの取得を継続する。一方、車両を検知した場合は、S504へ遷移する。ここで、検知部11による車両検知は、図3乃至図4を参照して説明したように、計測領域の車線を走行する車両に向け照射された複数のレイヤとエコーから取得される測距データに基づいて車両を車両端にて捉える。この時、レーザビームの照射について対象の車両までの距離に応じた垂直位置(高さ)に設置(例えば、乗用車の車両端を捉える場合は、垂直位置を1mの高さに設置)することで、物体を認識するために予め対象物体の大きさを示す物体情報DB(図示しない)の登録を不要とし、車両を検知する。
【0034】
車両が検知された場合、データ処理部2は、各測距部10で測距された距離データ及びエコーデータを含む測距データを、検知部11を介して取得して、測距データDB701に経時的に記憶する(S504)。そして、データ処理部2は、隣接する距離データ及びエコーデータを用いて統合処理して、車両の位置を示す三次元の(xyz)座標変換して当該車両に関するポイントデータを生成する(S505)。求めたポイントデータ及び距離データ等のデータはポイントデータDB702に記憶される。また、データ処理部2は、ポイントデータDBに記憶された距離データを用いて車両の時速を演算し、求めた時速をポイントデータDBに記憶する(S506)。車両の時速の演算は上記した例による。
ここで、統合処理とは、複数レイヤの測距部10及び検知部11を通して取得された各レイヤの距離データ及びエコーデータに対して適用して、全ての三次元座標データ及び角度分解能から同じと判断されたものを同一のポイントデータとする処理である。例えば、図10の距離データ101(35.42m)とエコーデータ102(38.54m)を統合処理して、三次元座標(xyz)データの近い距離を角度分解能#001を同一のポイントデータとする。
【0035】
データ処理部2は更に、車両の三次元座標データを基に同一車両を判定して、同一車両ごとに固有のID(車両IDという)を付与して、時速データ等に車両IDに対応付けてポイントデータDBに記憶する(S507)。データ処理部2はまた、車両の方向と車両の両端、若しくは片端から車両位置の演算結果と一段階前に演算された同一車両位置とを対応づけて車両の走行軌跡を認識する。そして、ポイントデータDB702を検索して、前演算の検知結果から位置の近い車両を求める。
ここで、車両の走行軌跡は、車両ID:001の(xyz)座標、及び距離データを繋げる作用により判定結果から、速度の軌跡を繋ぐことができる。この時、経時的に演算される車両の時速は、ポイントデータDB702に記憶されているので、入力部4からの指定条件に従い、ポイントデータDB702を読み出して時速の表示が可能である。
【0036】
上記同一車両の判定(S507)による判定の結果、同一でない場合は、死角を走行していた車両と判断して、その車両の時速は演算しない(S508)。一方、同一車両と判定の場合は、ポイントデータDB702に記憶された当該車両の時速を読み出して、表示部6に表示する(S509)。最後に、計測の終了を判断して(S510)、計測を継続する場合は、S502へ遷移する。
【0037】
ここで、同一車両の判定についてポイントデータDB702を用いて説明する。例えば、
(a)角度/分解能#:−49.5°/001、距離データ:35.42m、時速134.78k/m、レーザセンサからの物体における(xyz)縦横高における位置座標:縦:35.42m,横:36.31m,高さ1.0mと、
(b)角度/分解能#:−48.4°/001、エコーデータ:時速138.67k/m、(xyz)座標:縦:38.54m,横:39.50m,高さ1.0mと、
(c)角度/分解能#:−47.1°/001、エコーデータ:時速139.1k/m、(xyz)座標:縦:32.11m,横:32.91m,高さ1.0mについて(xyz)座標、及び距離データを監視して、同一物体の移動であるとして軌跡を繋げる作用により、判定結果で車両ID:001の同一車両を認識する。
【0038】
[他の実施例]
上記実施例では、検知部11が、測距データに基づいて車両を検知する度にカメラ8でその車両を含む画像データを取得するように制御されるが、他の実施例によれば、距離データ92から演算された車両の時速が一定値を超えたと、データ処理部2が判定した場合に、カメラ8を制御して当該車両を含む画像データを取得して、画像データDB703に格納することが可能である。この場合、画像データDB703に格納される当該車両の画像データには、ポイントデータDB702に記憶するときに、当該車両に付与された車両IDと関連付けられた(例えば同一の)IDが付与されて、記憶される。これにより、その後、当該IDをキーにして、ポイントデータDB702及び画像データDB703を検索して、速度超過した対象の車両を読み出して、車両IDに対応した車両の速度と車両を含む画像データを表示部6に表示することが可能となる。
【0039】
本実施例の交通流計測システムによれば、計測領域に対して路面より高さ方向に複数のレイヤを形成するようにレーザビームを照射して、複数のレイヤごとの測距データを取得する。更に、計測対象の物体よりも手前に存在する物体までの測距データであるエコーデータも取得する。そして物体までの測距(距離)データとエコーデータの複数のポイントデータから、角度毎に1つの測距データに統合処理ことにより、1本のレーザビームを照射した場合に比べて、物体の形状におけるレーザセンサの反射率の変動を最小限にするという効果が得られる。
【0040】
また、車両の計測領域外の車線への移動や複数車線に複数車両が並行に走行する場合、車両の移動に追従して個別に車両の位置を認識することにより、遠方から捉えた車両について測距データから正確な車両の時速を計測し、演算による時速計測を対象外とすることの効果を得る。例えば、車両の時速計測の開始時に走行車線1を車両A,Bが、走行車線2を車両C,Dが走行する場合、計測開始当初に、車両端を以て車両A〜Dの位置を捉え、経時的に測距されるポイントデータ(時間差の物体の位置)から車両の時速を演算して計測する。
計測開始からの時間経過にて、計測中に走行車線2から走行車線1に車線変更をした車両Cが有る場合と、走行車線2から外れた車両Dが有る場合、計測対象を走行車線1,2とすると、車両A,Bと、先に計測開始時点で把握された車両Cの時速も演算され、レーザセンサから一定距離地点を計測ポイントと定義すれば、ここに至った時点での車両A,B,Cの時速計測の結果が出力され、車両Dを除外する。このようにして、車線上の車両の計測結果を良好に求めることができる。
【0041】
更に、レイヤ4,3とレイヤ2,1をペアとする測距データと、エコーデータにおけるエコー1:レーザセンサのガラス近傍の物体、エコー2:物体との間の雨粒などの物体、エコー3:背景よりも前方の物体にて捉えられた、最大4本の物体ポイントデータが取得できる。そして、センシングの一角度での測距データにおいては最大12ポイント(=4本のレイヤの測距データ×各レイヤでの3本のエコーデータ)となる場合がある。例えば、角度n°の測距データ12箇所のポイントと、0.125°ずれた測距データ12ポイントの内、数ポイントの集まりが同一物体を示す場合、集まりのポイントをクラスタリングにて同一物体と見なし、統合処理することで同一物体や背景よりも手前に存在する物体を検知することが可能である。
【0042】
また、走行車線を背景データとして予め取得して走行車線に計測範囲に設定し、計測範囲内における物体検知において複数のレイヤの測距データを利用して各車両の車両端を個別に検出することにより、同一走行車線上に存在する複数車両から車両を的確に検知できる。これにより、特定の計測車線を設けた場合においても、良好に車両の時速計測ができる効果が得られる。
【符号の説明】
【0043】
1:レーザセンサ 10、101〜104:測距部 11、111〜114:検知部
2:データ処理部 3:設定制御部 4:入力部 5:画像取得部 6:表示部
7:記憶部 8:カメラ
92:測距データ 93:表示データ 94:演算結果 95:画像データ
701:測距データDB 702:ポイントデータDB 703:画像データDB
704:交通流データDB
【技術分野】
【0001】
本発明は、交通流計測システムに係り、特にレーザビームを計測領域に照射して得られる距離データの位置や距離等から、走行中の車両の時速や車両の台数を検知して交通流を計測し、更に計測状況における車両等の画像を取得することが可能な交通流計測システムに関する。
【背景技術】
【0002】
レーザセンサによるレーザビームを利用して計測領域を走行する車両を測距し、得られる距離データから車両の時速や交通流を計測する技術が知られている。
例えば、特許文献1には、対象となる車両が通行する検出領域に対して、その上方位置から検出領域内の計測対象位置に向けてレーザビームを照射し、車両の進行方向と直交方向に対して、一定角度だけ傾けた走査方向に走査することにより、受信される反射信号の遅延時間に基づいて、検出対象までの距離と車両の進行方向の検出距離情報を分離し、その車両の進行方向に沿った成分から外形形状を認識し、走査方向に対する走査毎に得られる距離検出情報から検出対象物の特徴点の移動を検出して、そのときの車両の時速を計測する技術が開示されている。
【0003】
また、特許文献2には、可搬型の交通流計測装置において、電波ビームの範囲内に計測当該車両が進入したことを、送信ゲート信号と受信ゲート信号の時間間隔を計測して電波を送信し、計測当該車両の受信ドップラ信号が無くなったことを検知して、計測対象車が電波ビームより退出したことを判定して電波を停止することで、自動的に電波の送信及び停止し、交通流の計測が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−203588号公報
【特許文献2】特開2004−301587号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の装置は、検出領域内における車両の通行速度を検出し、少なくとも車両の先頭部分あるいは後尾部分が通過するときに、その車両の特徴点を抽出からその速度を計測する。そのため、計測に際しては、当該車両の先頭、若しくは後尾の部分を測距できる位置へのセンサの設置と、当該車両が計測点を通過する必要があり、走行車線の遠方から経時的に(複数回の)速度計測をすることができないと言う課題がある。
【0006】
また、特許文献2に記載の装置は、電波ビームを用いて、計測当該車両の進入、退出を検知するが、計測当該車両がこれまでの走行車線から外れて他の走行車線へ車線変更した場合、距離データから求められる移動距離に誤差を生じる可能性から、車両の時速計測では誤差を生じる可能性が、更に交通流計測では、車両の台数に誤差を含んだ計測値になると言う課題がある。
【0007】
本発明の目的は、上記課題に鑑み、複数のレイヤを形成する複数のレーザビームにより取得される距離データから物体の特徴点を検知して車両を認識し、かつ遠方向から車両を捉えながら正確な車両の速度や、車両の台数から交通流を計測することができる交通流計測システムを提供することにある。
【課題を解決するための手段】
【0008】
本発明の交通流計測システムは、好ましい例では、レーザセンサのレーザビームの照射によって計測領域から取得される測距データを用いて、車線を走行する車両までの距離を計測し、車両の速度や車両台数を計測する交通流計測システムであって、
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、
該各測距部に対応して、該測距部で取得された測距データから車両の位置を検知する検知部と、
該測距部により取得された、距離データ及びエコーデータを含む測距データをレイヤ対応に記憶する測距データDBと、
該各測距部により取得された、レイヤ対応の該距離データと該エコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、
該データ処理部によって統合処理された距離データと、演算された速度データと、三次元座標データを記憶するポイントデータDBと、
該検知部で検知された車両に関するデータを表示する表示部を有し、
該データ処理部は、該ポイントデータDBに記憶された三次元座標データを用いて、同一車両かを判断し、同一車両と判断した場合には該車両に同一のIDを付与し、
該ポイントデータDBは、該同一のIDに対応付けて、同一と判断された該車両の速度データ、該距離データを記憶し、該表示部は、該データ処理部で同一車両と判断された車両の速度データを表示することを特徴とする交通流計測システムとして構成される。
【0009】
好ましい例では、更に、計測領域内の車線上を走行する車両の画像データを取得する画像取得部を有し、前記データ処理部が、演算した車両の速度が所定の速度を超過している判断した場合、該画像取得部によって取得された車両を含む画像データと、該車両の該速度とを関連付けて、該表示部に表示する。
【0010】
また好ましい例では、更に、車両の交通流に関するデータを記憶する交通流データDBを有し、前記データ処理部は、前記ポイントデータDBを検索して、指定された時間間隔に関して該当する固有IDの車両のデータを得て、該固有IDが付与された車両の数を合計して車両台数を求め、求めた車両台数のデータを該交通流データDBに記憶する。
【発明の効果】
【0011】
本発明の交通流計測システムによれば、複数のレイヤを形成する複数のレーザビームにより取得される距離データから物体の特徴点を検知して車両を認識し、かつ遠方向から車両を捉えながら正確な車両の速度や、車両の台数から交通流を計測することができる。
【図面の簡単な説明】
【0012】
【図1】一実施例における交通流計測システムの構成を示す図。
【図2】一実施例における遠方の車両の距離データと画像を取得する例を示す図。
【図3】一実施例における複数のレイヤによる車両端の位置情報の取得を説明するための図。
【図4】一実施例における車両接近による複数レイヤにおける測距位置の変化を示す図。
【図5】一実施例における車両の時速演算の処理動作を示すフローチャート。
【図6】一実施例における複数レイヤのレーザビームの照射イメージを示す図。
【図7】一実施例における複数レイヤのレーザビームの照射と解像度の関係を示す図。
【図8】一実施例における測距データDBのフォーマットを示す図。
【図9】一実施例におけるポイントデータDBのフォーマットを示す図。
【図10】一実施例における距離データとエコーデータの関係を示す概念図。
【図11】一実施例における交通流データDBのフォーマットを示す図。
【発明を実施するための形態】
【0013】
以下、本発明の好適な実施例について、図面を参照して説明する。
図1は、一実施例における車両の時速計測をする交通流計測システム構成を示す。
この交通流計測システムは、路面から垂直方向に、レーザビームが複数レイヤ(この例では4つの照射面)を形成するように、4本のレーザビームを照射するレーザセンサ1を有する。レーザセンサ1は、4本のレイヤから照射するレーザビームにより距離データを含む測距データを得る測距部101〜104(総じて10と示す)と、各レイヤの測距部10に対応して、走行車線上の車両などの物体を検出する検知部111〜114(総じて11と示す)を有する。
【0014】
更に、交通流計測システムは、検知部11から得られた測距データ(距離データ)92を用いて車両の時速を演算し、また車両の速度や交通流のデータを表示部6に表示するためのデータ処理を行うデータ処理部2と、レーザセンサ1の検知部11の設定やレーザセンサの制御を設定する設定制御部3と、管理者等によって操作され、設定制御部3やデータ処理部2に対する指示やデータの入力をする入力部4と、レーザセンサ1と車両との距離が予め設定された条件となった場合に、カメラ8で計測領域の画像データ95を撮影して取得する画像取得部5と、設定制御部3において設定された制御情報やデータ処理部2で演算された車両の時速や画像取得部5で取得した画像を、表示データ93として表示する表示部6と、本システムで取得される測距データ92、車両の速度や、通過車両台数の演算結果94、及び車両の画像データ95を記憶する記憶部7を有して構成される。記憶部7は、測距データDB701と、時速データを記憶するポイントデータDB702、及び画像データDB703、交通流データDB704を有している。
【0015】
データ処理部2は、測距部10により測距され、検知部11にて検出された車両までの距離に基づき、車両の現在位置を演算し、この演算結果94と一段階前に演算される同一車両の位置データとを対応づけて車両の走行軌跡を認識する。この認識結果は、記憶部7に記憶され、また必要に応じて各種の制御装置(後述)に出力される。
車両の時速計測に関しては、車両の形状を連続する点の集まりの座標値であるポイントデータとして認識して、測距する車両の大きさやその移動方向に一定の条件を設けることで、レーザセンサから車両までの距離を求めることができる。この距離データから車両の時速を演算することが可能となる。
特に、車両の前面の両端、若しくは片端部分の位置データを経時的に監視することで、車両の走行車線を的確に把握することができると共に、車両が走行車線を移動した場合でも、両端又は片端部分の位置データに基づいて、車両までの距離を求めることが可能であり、車両の時速を正確に計測することが可能となる。
【0016】
本実施例の特徴の1つとして、車両の距離データの他にエコーデータを取得することがあげられる。エコーデータは、マルチターゲット機能として、レーザビーム毎に最大3つのエコーを認識評価が可能であり、出力電圧を閾値に基づいてシステムノイズとエコーデータを分離して取得することができる。エコーデータは、距離データと同様にレーザセンサが複数のレイヤごとに物体を検知し、測距における変化が生じれば、何らの設定や処理を伴わずにその取得が可能である。
【0017】
3つのエコーデータをエコーデータ1〜3とすると、エコーデータ1は、例えば、レーザビームが照射されるガラス板に近い空間では、短時間に高電圧の変化を捉える。エコーデータ2は、対象物体までの間の空間では、例えば、雨粒などを短時間の微小電圧を捉える。エコーデータ3は、対象物体に最も近い空間では、比較的長時間での高電圧を捉えることで分離してエコーデータを認識する。
本実施例において、レーザセンサによるエコーデータ1〜3は、経時的な計測において毎回取得できるとは限らず、経時的に測距する中で対象物体が存在した以降、それを検知した場合のみエコーデータが取得され、かつ測距における変化を取得することができる。
【0018】
図10に示すように、ある分解能における距離データ101とエコーデータ102は、同等に取扱われてポイントデータの生成に使用され、物体の認識に利用される。データ処理部2は、測距データDB701に記憶された、レイヤごとの距離データとエコーデータについて、例えば距離データ(35.42m)とエコーデータ(38.54m)を同一物体のポイントデータとして認識して、イメージのクラスタ処理にて角度分解能#001として統合して距離データ111と、エコーデータ112として認識することができる。
【0019】
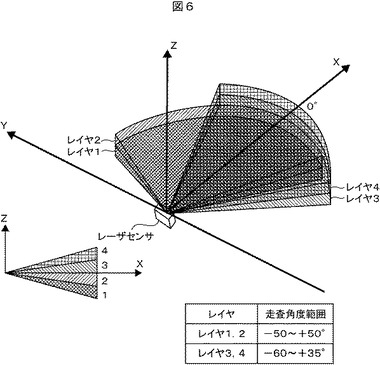
複数レイヤのレーザビームを利用した本実施例による物体の計測を、従来の近距離を捉えた単一のレイヤのみのレーザビームによる計測と比較すると、従来のレーザビームの照射角(例えば、180°や270°)に対して、本実施例では垂直方向に複数のレイヤでの照射角は110°(−60〜+50°の範囲)に絞られるので、レーザビームの照射距離が40m以上200m程度まで伸びることになり、より遠方の物体を捉えることが可能となる。カメラのレンズに例えれば、レーザビームの照射角度と照射距離に関する物体検知は、従来は広角〜標準レンズで物体を捉えるが、本発明では中程度の望遠レンズを固定して遠方の物体に照準を合わせ、物体を捉える計測と類似したものとなる。
【0020】
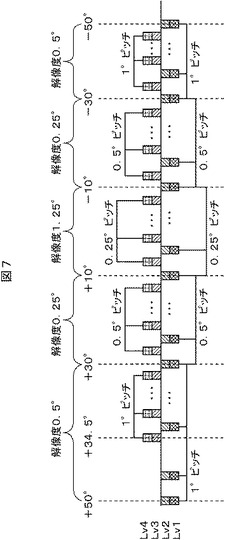
本実施例において、設定制御部3は、解像度0.5°では1°のピッチで、解像度0.25°では0.5°のピッチで、解像度0.125°では0.25°のピッチで、レイヤ4,3とレイヤ2,1をインターレース方式により順番に走査するように制御する。更に、設定制御部3は、4本のレイヤのうち上側の2本のレイヤ4,3(Lv4,3)(走査角度範囲:−60°〜+35°)と、下側の2本のレイヤ2,1(Lv2,1)(走査角度範囲:−50°〜+50°)とをペアにして、ずらして交互にレーザビームを照射するようにレーザセンサ1を制御する。走査角度範囲が(−50°〜+35°)の範囲で複数のレイヤ4〜1のスキャンレベルが揃い、各レイヤが−60°〜+50°の範囲をスキャンすることになる。これにより、全体の解像度に拡げて領域の解像度を2倍とすることが可能である(図6参照)。
【0021】
データ処理部2は、各レイヤ対応の検知部11が検知した距離データと、レイヤ4〜1ごとの角度分解能と、最大3つのエコーデータをそれぞれ対応付けて、測距データDB701(図8)に記憶する。例えば、4本のレイヤからは、車両を捉えたレイヤを選択する動作(図7)によって、全体の解像度の拡大をすることができる。
データ処理部2は、更に、測距データDB701に蓄積されたレイヤ4〜1ごとの距離データ及びエコーデータを用いて、対象の車両の速度を演算して、レイヤ、エコーからの測距データ統合による車両のポイントデータと、車両の速度と、座標変換データをポイントデータDB702(図9)に記憶する。更に、ポイントデータDB702に記憶された車両の時速データを読み出して、車両ごとに表示部6に表示する。
【0022】
ここで、レイヤ、エコーからの測距データ統合とは、計測領域で物体を検知するため、各レーザセンサからの測距データを重ね合わせて各レーザセンサを原点とした1つの(xyz)座標変換する処理をいう。詳しくは、フレーム時間毎に任意の座標を原点とし、その原点からの各レーザセンサの座標、及びセンサの傾き(ピッチ角、ロール角、ヨー角)を考慮した座標をポイントデータに変換することであり、複数のレーザセンサで測定している空間を1つの(xyz)座標に統合するものである。これにより、計測領域においてレーザセンサでの距離データやエコーデータのズレや不一致をキャリブレーション補正した測距データを得ることができる。
【0023】
図2は、遠方の車両の距離データと画像を取得する例を示す。
2車線ある走行車線201を走行する車両203への測距において、レーザセンサ1の複数レイヤから車両203までの距離が、例えばレーザセンサの測距可能な距離40m以下になると、レーザセンサ1の複数のレイヤ4〜1内、車両203の位置を測距できるレイヤが生じることから、この地点から経時的に車両の距離データを取得しながら時速を計測することができる。また、走行車線201のレーザセンサ1の近傍に設置されたカメラ8により、走行状況の画像取得をする測定ポイント202に到達時点で取得することができる。レーザセンサ1で取得された測距データは測距データDB701に格納され、画像データは画像データDB703に格納される。
【0024】
[演算例1]
次に、データ処理部2による車両の時速の演算方法について説明をする。
例えば、測距における計測周波数12Hzとし、レーザセンサから当該車両の距離を移動車両の位置データから計測する。この場合、計測値が移動前:33.1m、移動後:36.1mとすると、その差分の距離から移動距離を求めると、
移動距離=移動後の計測値−移動前の計測値 ・・・(1)
=36.1m−33.1m=3.0m
となる。
(1)式の移動距離から計測周波数(12Hz)における速度を求めると、
速度=距離×周波数(÷時間) ・・・(2)
=3.0m×12Hz≒36.0m/s
となる。
これを時速に換算すると、
時速=36.0m/s×3600s≒130km/h ・・・(3)
となり、(3)から、時速130km/hであることが分かる。
【0025】
[演算例2]
計測周波数の間隔にて測距値が得られることで、車両の時速計測が可能となるが、計測周波数の間隔毎にて測距データが得られない場合においても、数ピッチ間隔後に測距データが得られれば、数ピッチ後に測距されるまでの平均値として、車両の時速の計測が可能となる。
例えば、ある任意の2点間の測距データが移動前:33.1mと移動後:41.5m、周波数(時間)12Hzの計測で移動前〜移動後で1ピッチ〜4ピッチ目とすると、(1)式より移動した移動距離を求めると、
移動距離=41.5m−33.1m=8.4m ・・・(4)
計測ピッチ間隔=4ピッチ目−1ピッチ=3ピッチ
となる。
この2点間の計測周波数の計測ピッチ間隔では、(4)の移動距離からピッチ間の平均移動距離を求めると、
平均移動距離=8.4m÷3ピッチ≒2.8m
となり、(2)式からピッチ間の平均速度を求めると、
平均速度=2.8m×12Hz≒33.6m/s
となる。これを平均時速に換算すると、
平均時速=33.6m/s×3600s≒121km/h ・・・(5)
となり、(5)から移動前後の区間を平均時速121km/hで走行したことが計測される。また、移動距離から物体の速度を時速換算して計測時間を以て平均時速121km/hが求められる。このように、車両までの任意の2点間の距離データを用いて、車両の時速を演算することができる。
【0026】
[演算例3]
ここで、本実施例による車両の時速計測における精度について確認をする。例えば、レーザセンサの測距による距離の誤差が±10cmの場合、移動距離と時速の誤差を求める。
上述の(3)の演算結果から、移動距離は前述の(1)式、測距データの距離の誤差について(2),(3)を用いて演算すると、
(a)時速130km/hでは、移動距離3.0mであり、
距離の誤差−10cmでは、移動距離2.9m、時速126km/hとなり、
距離の誤差+10cmでは、移動距離3.1m、時速134km/hとなる。
そして、
(b)時速100km/hでは、同移動距離2.3mであり、
同誤差−10cmでは、同距離2.2m、時速96km/hとなり、
同誤差+10cmでは、同距離2.4m、時速104km/hとなる。
更に、(c)時速60km/hでは、同移動距離1.39mであり、
同誤差−10cmでは、同距離1.29m、時速56km/hとなり、
同誤差+10cmでは、同距離1.49m、時速64km/hとなる。
各速度帯の演算による時速は、(a)126〜134、(b)96〜104、(c)56〜64km/hであることから、レーザセンサの測距による誤差から演算される時速計測は、±4km/hの誤差範囲の精度であることが分かる。
【0027】
次に、交通流の計測について説明する。
[計測例1]
交通流データとは、単位時間当たりに計測領域を通過する車両の台数をいう。本実施例では任意に設けた計測領域の走行車線についてレーザビームを照射して、交通流を計測し、1時間当たりの通過車両の台数や、一定速度以上での通過車両の台数について測定する。交通流の測定は、測定位置xを固定して実施する。ここで、1時間当たりの通過車両の台数の測定について説明をする。
入力部4により測定時間が指定される。データ処理部2は、ポイントデータDB702を検索して、指定された時間間隔に関して該当する固有IDの車両のデータを全て得て、固有IDが付与された車両の数を合計して車両台数を求める。そして、求めた車両台数を表示部6に表示すると共に、指定時間ごとに求めた演算結果(通過台数、単位時間当たりの台数、及び車両の時速)94を交通流データDB704に記憶する。
図11に交通流データDB704の例を示す。例えば、測定の時刻#A+Bまでを対象にした測定で、通過した車両台数が得られた場合の1時間当たりの通過車両の台数は、測定時刻A、時刻Bでの通過した車両台数の総和÷2から演算され、(261+243)÷2=252台として求められる。
【0028】
[計測例2]
ここでは、一定速度以上での通過車両の台数の測定について説明する。
車両速度は、任意の2点間における距離データに基づいて演算されるため、測定の基準位置手前に測定開始ポイント(図示しない)を設けておき、基準位置にて当該車両が走行する車線において車両速度を演算する。
データ処理としては、前述の1時間当たりの通過車両の台数の測定の処理に加えて、入力部4により測定する速度範囲として時速を設定しておく。データ処理部2は、ポイントデータDB702の判定結果にて、固有IDが付与された車両の時速を演算し、設定の速度範囲にある車両の台数を計数して、その結果を表示部6に表示する共に、演算結果94を記憶部7の交通流データDB704に記憶する。
【0029】
交通流は、走行車線201について時間当たり、又は車線当たりなどの一定条件に走行する車両203の流量を計測することで、交通渋滞や騒音や排出ガスによる大気汚染を軽減する対策などに利用される。先述の通り、車両を特定するため物体IDを付与して経時的に監視する方法の他、計測ポイント202において、最上のレイヤ4を大型車両の高さ(例えば、3.0m)に設定し、これが測距される車両の台数や、車線を計測する方法が考えられる。これは、レーザセンサ1を走行車線201に沿って設置し、常設にて長期に俯瞰する計測方法も有る。
例えば、一般道における車両の時速計測の場合、レーザセンサから対向位置に反射物を設置できる場合は、走行車線が決められた高速道路と同様、予め背景データの取得が可能となる。制約条件がある場合は、車線を示す白線や黄色線の位置を予めレーザセンサにて測距して、これを車両の時速計測する計測領域の目安値とする方法がある。
【0030】
次に、図3を参照して、複数のレイヤによる車両の端を捉えた位置データの取得について説明する。
(A)は、計測対象の車線を走行する車両を遠方向から捉えたイメージである。これは、車両の測距対象領域である走行車線の背景データとして予め取得することで、走行車線を通過した車両を的確に捉えることができる。
(B)は、走行車線を走行する車両についてレーザセンサの複数レイヤにおけるレーザビーム照射のイメージである。走行車線301を走行する車両を経時的に測距する場合、複数レイヤの照射位置は、レーザセンサから車両までの距離により位置が経時的に変化する。例えば、レイヤ2にて車両の車両端を捉える水平位置にレーザビームを照射することを想定する。
(C)は、車両の片端を捉えて測距する場合の複数レイヤによるレーザビーム照射のイメージである。走行する車両を経時的に測距する場合、車両が走行車線301を左右に移動することを想定した位置情報の取得ポイントを示す。
車両端の測距データを経時的に監視することで、走行車線301を的確に把握できると共に、車両が走行車線301を移動したことを検知した場合でも、車両端の測距データに基づいて、車両の動きに追従してその車両の時速を演算することが可能である。
【0031】
図4は、車両接近によるレイヤ4〜1の測距位置の変化を示す。
この例は、走行する車両の時速計測に際して、路面よりレイヤ4〜1を割り付け、4本のレイヤを有するレーザセンサを用いて、レイヤの位置が変化する様子を示す。図中の各レイヤ上の四角X4〜X1は、各レイヤが高さ方向において検知する車両への位置幅を示したもので、車両を測距するためにレーザビームを照射する位置や角度によって幅は異なってくる。
図中(A)〜(C)は、4本のレイヤを有するレーザセンサに向かって車両が接近する場合の測距されるレイヤ位置が経時的に変化する様子を示す。
(A)は、車両を検知した最初の状態を示す。レーザセンサ1、カメラ8に対して、車両203は、レーザセンサ1の計測可能範囲として40mを想定した遠方にあり、路面に近いレイヤ1は車両の位置を捉え、レイヤ4は車両の上空を捉えている。そして、経時的な測距によってレイヤ3は車両全面からボンネットの位置を、レイヤ2は車両端を捉えている。
(B)は、車両が前進した状態を示す。レイヤ4は車両全面からボンネットの位置を捉え、レイヤ3は車両全面を捉えている。また、レイヤ2は車両端を捉え、レイヤ1は車両下部を捉えている。この時点まで、レイヤ2によって車両の両端、若しくは片端の位置が測距されており、車両の幅についてのデータを採取することができる。
(C)は、更に車両が前進した状態を示す。レイヤ4,3は車両全面からボンネットの位置を捉え、レイヤ2,1は車両端を捉えている。この時点で、レーザセンサ1の近傍に設けられるカメラ8により、走行状況の画像取得をする測定ポイント202に到達時点で画像が取得できる。
このように、車両が当初の走行車線から隣の走行車線へ移動しても、レイヤ2が車両端を捉えていることで車両の移動後の位置を把握することができる。そのため、対象とする車両を正しく認識して、その車両の時速を計測することが可能となる。
【0032】
次に、図5のフローチャートを参照して、車両の時速演算の処理動作について説明する。
先ず、路面から高さ方向にレイヤ4〜1を有するレーザセンサ1を対象とする計測場所(車線が見渡せる場所)に設置し、初期設定として、計測領域(即ち距離計測範囲)の設定、測距条件や計測方法などの設定を行う(S501)。この設定は、管理者が入力部4から必要なデータ及び指示を入力すると、設定制御部3がレーザセンサ1の測距部10および検知部11の条件を設定することで行われる。
【0033】
次に、レーザセンサ1が駆動して測距を開始すると、4本のレイヤ4〜1から走行車線の方向に向けてレーザビームが照射されて、4つの各測距部10は、計測領域を走行する車両及びその周辺及び前面から、距離データ及びエコーデータを含む測距データを取得する(S502)。
各検知部11は、取得した測距データから計測領域内に車両が検知されたかを判断する(S503)。判断の結果、車両が未検知の場合はS502へ遷移して測距データの取得を継続する。一方、車両を検知した場合は、S504へ遷移する。ここで、検知部11による車両検知は、図3乃至図4を参照して説明したように、計測領域の車線を走行する車両に向け照射された複数のレイヤとエコーから取得される測距データに基づいて車両を車両端にて捉える。この時、レーザビームの照射について対象の車両までの距離に応じた垂直位置(高さ)に設置(例えば、乗用車の車両端を捉える場合は、垂直位置を1mの高さに設置)することで、物体を認識するために予め対象物体の大きさを示す物体情報DB(図示しない)の登録を不要とし、車両を検知する。
【0034】
車両が検知された場合、データ処理部2は、各測距部10で測距された距離データ及びエコーデータを含む測距データを、検知部11を介して取得して、測距データDB701に経時的に記憶する(S504)。そして、データ処理部2は、隣接する距離データ及びエコーデータを用いて統合処理して、車両の位置を示す三次元の(xyz)座標変換して当該車両に関するポイントデータを生成する(S505)。求めたポイントデータ及び距離データ等のデータはポイントデータDB702に記憶される。また、データ処理部2は、ポイントデータDBに記憶された距離データを用いて車両の時速を演算し、求めた時速をポイントデータDBに記憶する(S506)。車両の時速の演算は上記した例による。
ここで、統合処理とは、複数レイヤの測距部10及び検知部11を通して取得された各レイヤの距離データ及びエコーデータに対して適用して、全ての三次元座標データ及び角度分解能から同じと判断されたものを同一のポイントデータとする処理である。例えば、図10の距離データ101(35.42m)とエコーデータ102(38.54m)を統合処理して、三次元座標(xyz)データの近い距離を角度分解能#001を同一のポイントデータとする。
【0035】
データ処理部2は更に、車両の三次元座標データを基に同一車両を判定して、同一車両ごとに固有のID(車両IDという)を付与して、時速データ等に車両IDに対応付けてポイントデータDBに記憶する(S507)。データ処理部2はまた、車両の方向と車両の両端、若しくは片端から車両位置の演算結果と一段階前に演算された同一車両位置とを対応づけて車両の走行軌跡を認識する。そして、ポイントデータDB702を検索して、前演算の検知結果から位置の近い車両を求める。
ここで、車両の走行軌跡は、車両ID:001の(xyz)座標、及び距離データを繋げる作用により判定結果から、速度の軌跡を繋ぐことができる。この時、経時的に演算される車両の時速は、ポイントデータDB702に記憶されているので、入力部4からの指定条件に従い、ポイントデータDB702を読み出して時速の表示が可能である。
【0036】
上記同一車両の判定(S507)による判定の結果、同一でない場合は、死角を走行していた車両と判断して、その車両の時速は演算しない(S508)。一方、同一車両と判定の場合は、ポイントデータDB702に記憶された当該車両の時速を読み出して、表示部6に表示する(S509)。最後に、計測の終了を判断して(S510)、計測を継続する場合は、S502へ遷移する。
【0037】
ここで、同一車両の判定についてポイントデータDB702を用いて説明する。例えば、
(a)角度/分解能#:−49.5°/001、距離データ:35.42m、時速134.78k/m、レーザセンサからの物体における(xyz)縦横高における位置座標:縦:35.42m,横:36.31m,高さ1.0mと、
(b)角度/分解能#:−48.4°/001、エコーデータ:時速138.67k/m、(xyz)座標:縦:38.54m,横:39.50m,高さ1.0mと、
(c)角度/分解能#:−47.1°/001、エコーデータ:時速139.1k/m、(xyz)座標:縦:32.11m,横:32.91m,高さ1.0mについて(xyz)座標、及び距離データを監視して、同一物体の移動であるとして軌跡を繋げる作用により、判定結果で車両ID:001の同一車両を認識する。
【0038】
[他の実施例]
上記実施例では、検知部11が、測距データに基づいて車両を検知する度にカメラ8でその車両を含む画像データを取得するように制御されるが、他の実施例によれば、距離データ92から演算された車両の時速が一定値を超えたと、データ処理部2が判定した場合に、カメラ8を制御して当該車両を含む画像データを取得して、画像データDB703に格納することが可能である。この場合、画像データDB703に格納される当該車両の画像データには、ポイントデータDB702に記憶するときに、当該車両に付与された車両IDと関連付けられた(例えば同一の)IDが付与されて、記憶される。これにより、その後、当該IDをキーにして、ポイントデータDB702及び画像データDB703を検索して、速度超過した対象の車両を読み出して、車両IDに対応した車両の速度と車両を含む画像データを表示部6に表示することが可能となる。
【0039】
本実施例の交通流計測システムによれば、計測領域に対して路面より高さ方向に複数のレイヤを形成するようにレーザビームを照射して、複数のレイヤごとの測距データを取得する。更に、計測対象の物体よりも手前に存在する物体までの測距データであるエコーデータも取得する。そして物体までの測距(距離)データとエコーデータの複数のポイントデータから、角度毎に1つの測距データに統合処理ことにより、1本のレーザビームを照射した場合に比べて、物体の形状におけるレーザセンサの反射率の変動を最小限にするという効果が得られる。
【0040】
また、車両の計測領域外の車線への移動や複数車線に複数車両が並行に走行する場合、車両の移動に追従して個別に車両の位置を認識することにより、遠方から捉えた車両について測距データから正確な車両の時速を計測し、演算による時速計測を対象外とすることの効果を得る。例えば、車両の時速計測の開始時に走行車線1を車両A,Bが、走行車線2を車両C,Dが走行する場合、計測開始当初に、車両端を以て車両A〜Dの位置を捉え、経時的に測距されるポイントデータ(時間差の物体の位置)から車両の時速を演算して計測する。
計測開始からの時間経過にて、計測中に走行車線2から走行車線1に車線変更をした車両Cが有る場合と、走行車線2から外れた車両Dが有る場合、計測対象を走行車線1,2とすると、車両A,Bと、先に計測開始時点で把握された車両Cの時速も演算され、レーザセンサから一定距離地点を計測ポイントと定義すれば、ここに至った時点での車両A,B,Cの時速計測の結果が出力され、車両Dを除外する。このようにして、車線上の車両の計測結果を良好に求めることができる。
【0041】
更に、レイヤ4,3とレイヤ2,1をペアとする測距データと、エコーデータにおけるエコー1:レーザセンサのガラス近傍の物体、エコー2:物体との間の雨粒などの物体、エコー3:背景よりも前方の物体にて捉えられた、最大4本の物体ポイントデータが取得できる。そして、センシングの一角度での測距データにおいては最大12ポイント(=4本のレイヤの測距データ×各レイヤでの3本のエコーデータ)となる場合がある。例えば、角度n°の測距データ12箇所のポイントと、0.125°ずれた測距データ12ポイントの内、数ポイントの集まりが同一物体を示す場合、集まりのポイントをクラスタリングにて同一物体と見なし、統合処理することで同一物体や背景よりも手前に存在する物体を検知することが可能である。
【0042】
また、走行車線を背景データとして予め取得して走行車線に計測範囲に設定し、計測範囲内における物体検知において複数のレイヤの測距データを利用して各車両の車両端を個別に検出することにより、同一走行車線上に存在する複数車両から車両を的確に検知できる。これにより、特定の計測車線を設けた場合においても、良好に車両の時速計測ができる効果が得られる。
【符号の説明】
【0043】
1:レーザセンサ 10、101〜104:測距部 11、111〜114:検知部
2:データ処理部 3:設定制御部 4:入力部 5:画像取得部 6:表示部
7:記憶部 8:カメラ
92:測距データ 93:表示データ 94:演算結果 95:画像データ
701:測距データDB 702:ポイントデータDB 703:画像データDB
704:交通流データDB
【特許請求の範囲】
【請求項1】
レーザセンサのレーザビームの照射によって計測領域から取得される測距データを用いて、車線を走行する車両までの距離を計測し、車両の速度や車両台数を計測する交通流計測システムであって、
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、
該各測距部に対応して、該測距部で取得された測距データから車両の位置を検知する検知部と、
該測距部により取得された、距離データ及びエコーデータを含む測距データをレイヤ対応に記憶する測距データDBと、
該各測距部により取得された、レイヤ対応の該距離データと該エコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、
該データ処理部によって統合処理された距離データと、演算された速度データと、三次元座標データを記憶するポイントデータDBと、
該検知部で検知された車両に関するデータを表示する表示部を有し、
該データ処理部は、該ポイントデータDBに記憶された三次元座標データを用いて、同一車両かを判断し、同一車両と判断した場合には該車両に同一の固有IDを付与し、
該ポイントデータDBは、該同一の固有IDに対応付けて、同一と判断された該車両の速度データ、該距離データを記憶し、
該表示部は、該データ処理部で同一車両と判断された車両の速度データを表示することを特徴とする交通流計測システム。
【請求項2】
更に、計測領域内の車線上を走行する車両の画像データを取得する画像取得部を有し、前記データ処理部が、演算した車両の速度が所定の速度を超過している判断した場合、該画像取得部によって取得された車両を含む画像データと、該車両の該速度とを関連付けて、該表示部に表示することを特徴とする請求項1の交通流計測システム。
【請求項3】
更に、車両の交通流に関するデータを記憶する交通流データDBを有し、
前記データ処理部は、前記ポイントデータDBを検索して、指定された時間間隔に関して該当する固有IDの車両のデータを得て、該固有IDが付与された車両の数を合計して車両台数を求め、求めた車両台数のデータを該交通流データDBに記憶することを特徴とする請求項1又は2記載の交通流計測システム。
【請求項1】
レーザセンサのレーザビームの照射によって計測領域から取得される測距データを用いて、車線を走行する車両までの距離を計測し、車両の速度や車両台数を計測する交通流計測システムであって、
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、
該各測距部に対応して、該測距部で取得された測距データから車両の位置を検知する検知部と、
該測距部により取得された、距離データ及びエコーデータを含む測距データをレイヤ対応に記憶する測距データDBと、
該各測距部により取得された、レイヤ対応の該距離データと該エコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、
該データ処理部によって統合処理された距離データと、演算された速度データと、三次元座標データを記憶するポイントデータDBと、
該検知部で検知された車両に関するデータを表示する表示部を有し、
該データ処理部は、該ポイントデータDBに記憶された三次元座標データを用いて、同一車両かを判断し、同一車両と判断した場合には該車両に同一の固有IDを付与し、
該ポイントデータDBは、該同一の固有IDに対応付けて、同一と判断された該車両の速度データ、該距離データを記憶し、
該表示部は、該データ処理部で同一車両と判断された車両の速度データを表示することを特徴とする交通流計測システム。
【請求項2】
更に、計測領域内の車線上を走行する車両の画像データを取得する画像取得部を有し、前記データ処理部が、演算した車両の速度が所定の速度を超過している判断した場合、該画像取得部によって取得された車両を含む画像データと、該車両の該速度とを関連付けて、該表示部に表示することを特徴とする請求項1の交通流計測システム。
【請求項3】
更に、車両の交通流に関するデータを記憶する交通流データDBを有し、
前記データ処理部は、前記ポイントデータDBを検索して、指定された時間間隔に関して該当する固有IDの車両のデータを得て、該固有IDが付与された車両の数を合計して車両台数を求め、求めた車両台数のデータを該交通流データDBに記憶することを特徴とする請求項1又は2記載の交通流計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−252626(P2012−252626A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−126182(P2011−126182)
【出願日】平成23年6月6日(2011.6.6)
【出願人】(000233295)日立情報通信エンジニアリング株式会社 (195)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月6日(2011.6.6)
【出願人】(000233295)日立情報通信エンジニアリング株式会社 (195)
【Fターム(参考)】
[ Back to top ]