
交通流計測装置
【課題】隠蔽による不具合を解消して車両の検出の精度を向上させ、かつ、破損の可能性を低減し、かつ、メンテナンスを簡便に行うことができる交通流計測装置を提供する。
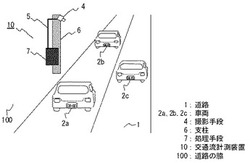
【解決手段】道路1上を撮影した映像を用いて道路1上に走行している車両を検出する交通流計測装置において、
道路の脇100の所定高さ位置から道路1の横断方向に道路1上の映像を撮影する撮影手段4と、
撮影手段4にて撮影された道路1上の映像を用いて道路1上の車両を検出する処理手段7とを備える。
【解決手段】道路1上を撮影した映像を用いて道路1上に走行している車両を検出する交通流計測装置において、
道路の脇100の所定高さ位置から道路1の横断方向に道路1上の映像を撮影する撮影手段4と、
撮影手段4にて撮影された道路1上の映像を用いて道路1上の車両を検出する処理手段7とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、道路上を撮影した映像を用いて道路に走行する車両の台数・速度等の交通流を精度良く計測することができる交通流計測装置に関するものである。
【背景技術】
【0002】
従来の交通流計測装置は、道路脇に設置したカメラにて通行車両を車両の前方または後方から監視し、車両の通過と車両の走行速度を検出するものである(例えば、特許文献1参照)。また、他の従来の交通流計測装置では、道路走行車線上空に設置したカメラにて走行車両を撮影し、車両の通過を検出するとともに車両の長さより車種の判別を行うものである(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3853574号公報
【特許文献2】特開2001−216598号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の交通流計測装置は、車両の前方または後方から監視する場合には手前側の車両が奥側の車両を隠蔽する場合があり、車両検出率を低下させるという問題点があった。また、車線上空にカメラを設置する場合には、アームを適正に収納していないユニック車などの通行車両が車線上の構造物を破損する場合があり、また、カメラの清掃等のメンテナンスの場合に車線の通行止め規制を行う必要があるなど、機器保守上望ましくないという問題点があった。
【0005】
この発明は上記のような課題を解決するためになされたものであり、隠蔽による不具合を解消して車両の検出の精度を向上させ、かつ、破損の可能性を低減し、かつ、メンテナンスを簡便に行うことができる交通流計測装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、道路上を撮影した映像を用いて道路上に走行している車両を検出する交通流計測装置において、
道路の脇の所定高さ位置から道路の横断方向に道路上の映像を撮影する撮影手段と、
撮影手段にて撮影された道路上の映像を用いて道路上の車両を検出する処理手段とを備えたものである。
【発明の効果】
【0007】
この発明の交通流計測装置は、道路上を撮影した映像を用いて道路上に走行している車両を検出する交通流計測装置において、
道路の脇の所定高さ位置から道路の横断方向に道路上の映像を撮影する撮影手段と、
撮影手段にて撮影された道路上の映像を用いて道路上の車両を検出する処理手段とを備えたので、
車両の前後間の隠蔽の影響を少なくして車両の検出の精度を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1の交通流計測装置の構成を示す図である。
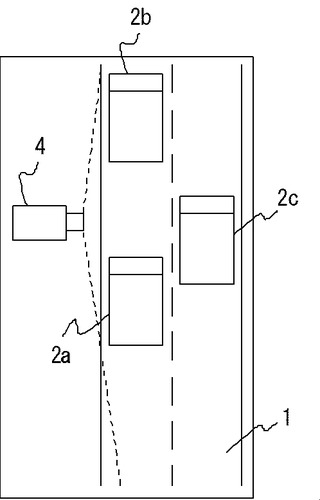
【図2】図1に示した交通流計測装置にて撮影する範囲の例を示す図である。
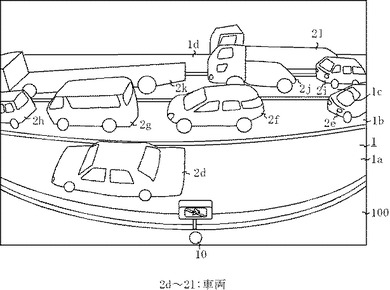
【図3】図1に示した交通流計測装置にて撮影された映像の例を示す図である。
【図4】図1に示した交通流計測装置の構成を示すブロック図である。
【図5】この発明の実施の形態2の交通流計測装置の構成を示すブロック図である。
【図6】この発明の実施の形態3の交通流計測装置の構成を示す図である。
【図7】図6に示した交通流計測装置の構成を示すブロック図である。
【図8】図6に示した交通流計測装置の交通流計測方法を説明するための図である。
【図9】図6に示した交通流計測装置の交通流計測方法を説明するための図である。
【図10】この発明の実施の形態4の交通流計測装置の構成を示すブロック図である。
【図11】この発明の実施の形態5の交通流計測装置の構成を示すブロック図である。
【図12】この発明の実施の形態6の交通流計測装置の構成を示すブロック図である。
【発明を実施するための形態】
【0009】
実施の形態1.
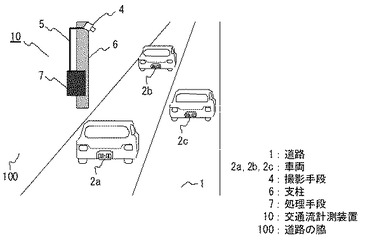
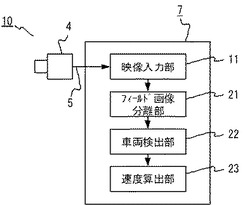
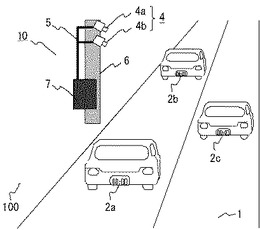
以下、本願発明の実施の形態について説明する。図1はこの発明の実施の形態1における交通流計測装置が道路の脇に設置された構成を示した図、図2は図1に示した交通流計測装置にて撮影する範囲の例を上面から示した図、図3は図1に示した交通流計測装置の撮影手段にて撮影した映像の例を示した図、図4は図1に示した交通流計測装置の構成を示すブロック図である。図において、交通流計測装置10は道路1上を撮影した映像を用いて道路1上に走行している車両2a〜車両2cを検出するものであり、撮影手段4及び処理手段7を備えている。そして、撮影手段4は、道路の脇100の所定高さ位置から道路1の横断方向に道路1上の映像を撮影するものであり、道路の脇100に配設され支柱6の所定高さに設置されている例えばCCTVカメラにてなる。このように設置された撮影手段4にて撮影される撮影範囲を上面から示すと、例えば図2の点線にて示したような撮影範囲となる。処理手段7は、撮影手段4の映像を映像伝送ケーブル5にて入力し、取り込んだ撮影手段4の映像を用いて車両を検出するものである。
【0010】
撮影手段4の道路の脇100の所定高さ位置とは、通常4〜8m程度の高さとなる。具体的には、道路1の横断方向の監視対象範囲としては、道路1の全車線の幅程度が想定される。よって、映像の縦方向の撮影範囲が、撮影手段4の設置位置から例えば4車線目、撮影手段4の位置から約20m先において、大型の車両の高さ3.5m程度が映ることを想定している。よって、このような所定高さ位置に撮影手段4を設定すると、4車線1a、1b、1c、1dからなる道路1において、例えば図3に示すように、画角を得ることができる。そして、図3に示すように、車両2d〜2lが撮影される。
【0011】
撮影手段4を道路1の横断方向に向けて設置して撮影する場合、道路1の撮影できる車両の走行方向に対する距離は、車両を後方または前方から監視する場合に比べ狭くなる。このため、車両の移動を検出するには非常に短い時間間隔で映像を撮影し、これらを比較する必要がある。撮影手段4は、インターレース方式と呼ばれる撮像方式を採用しており、記録された映像の横方向ラインは、縦方向に1ラインずつ飛ばしながら記録され、映像の下端まで到達した時点で再び映像の上端から前回飛ばしたラインの映像を記録していく。この上端から下端までの走査により得られる2枚の映像をフィールド画像と呼び、この2枚のフィールド画像より構成される1枚の画像をフレーム画像と呼び、フレーム画像は1秒間に約30枚記録される。
【0012】
この1枚のフレーム画像を構成する2枚のフィールド画像は、画像の上下方向に近接したラインにおいて、記録されるタイミングに約60分の1秒のずれがある。このため、移動している物体は約60分の1秒間の移動量だけ2枚のフィールド画像間で位置の違いが生じる。この60分の1秒間は、例えば160km/hなど非常に速い速度で走行する車両であっても、道路1の横断方向に向けて設置された撮影手段4の画角にて2枚のフィールド画像に充分に納まる時間間隔である。また、撮影手段4を道路1の横断方向に向けて設置しているため、車両の走行方向と画像の横方向とが一致しているため、従来の車両を前方または後方から監視する設置方法に比べて、フィールド画像間の比較による速度算出を行う場合、優れた精度にて算出することができる。
【0013】
処理手段7は、撮影手段4からの映像を取り込む映像入力部11と、インターレース化されて入力された映像をフィールド画像ごとに分離するフィールド画像分離部21と、フィールド画像分離部21より入力された2枚のフィールド画像を比較し、変化部分を抽出することにより移動部分が走行する車両であるとして検出する車両検出部22と、2枚のフィールド画像間の変化部分について画像中の移動量を算出し、さらに、撮影手段4の設置情報・カメラ画角情報などに基づいて車両の移動速度を算出する速度算出部23とにて構成されている。
【0014】
次に上記のように構成された実施の形態1の交通流計測装置の動作について説明する。まず、撮影手段4により撮影された例えば図3に示すようなフレーム画像が、映像伝送ケーブル5を介して、処理手段7の映像入力部11に入力される。次に、フィールド画像分離部21は、このインターレース化されて入力された映像である1枚のフレーム画像を、2枚のフィールド画像に分離する。次に、車両検出部22は、縦方向サイズがフレーム画像のサイズの2分の1のサイズとなっているこの2枚のフィールド画像について、対応する画素位置の輝度値の差の絶対値を取得する。そして、変化のある部分はこの差が大きな値をとる。よって、その大きな値をとる部分の差分画像を得る。この大きな値を持つ領域(差分画像)が、移動物体のある領域、すなわち、走行している車両の位置として検出する。
【0015】
次に、速度算出部23は、車両検出部22において検出された車両の領域に基づいて、2枚のフィールド画像間での相互相関計算によるマッチング処理を行い、最も一致する位置を探索する。このことにより、2枚のフィールド画像間での画像上の移動距離を得る。この画像上の移動距離により、あらかじめ与えされている、撮影手段4の画角情報・設置情報などに基づいてを道路1上での60分の1秒あたりの移動距離を算出し、車両の移動速度を算出する。
【0016】
尚、上記に示した処理を行うことにより、車両検出部22及び速度算出部23は、速度の速い車両に対して検出を行うことができる。また、速度の遅い車両に対しては、時間間隔の長い2つのフレーム画像、または、時間間隔の長いフィールド画像を用いて、上記に示した処理と同様の処理を行うことにより、速度の遅い車両に対しても車両検出性能・速度算出性能を確保することができる。また、本実施の形態1においては、インターレース化された複数のフィールド画像の差を用いる例を示したが、これに限られることはなく、異なる時点で撮像された、適切な時間間隔の複数の道路上の映像であれば、どのような映像を用いても上記実施の形態1と同様に行うことができ、同様の効果を奏することが可能である。
【0017】
上記実施の形態1の交通流計測装によれば、車両を前方または後方から監視する方法に比べて、車両の前後間の隠蔽の影響を少なくして検出することができる。また、撮影手段を道路の横断方向に向けることで追跡範囲が広く確保できない状態においても、車両の検出及び車両の速度を容易に算出することができる。また、撮影手段を道路の脇に設置しているため、車両による破損の可能性を低減し、かつ、メンテナンスを簡便に行うことができる。また、映像をインターレース化された複数のフィールド画像を用いるため、車両の検出及び車両の速度を一層容易に算出することができる。
【0018】
実施の形態2.
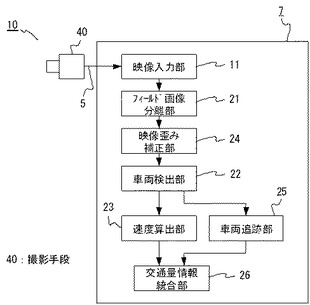
図5はこの発明の実施の形態2における交通流計測装置の構成を示すブロック図である。図において、上記実施の形態1と同様の部分は同一符号を付して説明を省略する。撮影手段40は、凸型レンズまたは超広角レンズなどの円筒型広角レンズにて撮影を行うものであり、他の構成は上記実施の形態1の撮影手段4と同様に構成されているものである。処理手段7は、フィールド画像分離部21と車両検出部22との間、凸型レンズまたは超広角レンズによる映像の歪みを補正する映像歪み補正部24と、車両検出部22にて複数の位置で検出した車両が同一車両か否かを検出位置の時間的移り変わり及び算出速度に基づいて車両を追跡判定する車両追跡部25と、追跡した車両の台数・速度に基づいて交通流計測値を求める交通量情報統合部26とを備えたものである。
【0019】
次に、上記のように構成された実施の形態2の交通流計測装置の動作について説明する。尚、本実施の形態2においては、上記実施の形態1と異なる動作についてのみ説明し、他の動作は上記実施の形態1と同様に行うことができるためその説明は適宜省略する。まず、上記実施の形態1の撮影手段4は、道路1の横断方向を向けて設置されているため通常のレンズでは監視範囲が狭いため、本実施の形態2においては撮影手段40には凸型レンズまたは超広角レンズを用いて撮影を行うことにより、監視範囲を広げる。そして、処理手段7の映像歪み補正部24では、凸型レンズまたは超広角レンズを用いて撮影された映像は歪みが生じているため、入力された映像の歪みを補正する。
【0020】
そして、歪みが補正された映像は、通常のレンズの場合、すなわち、上記実施の形態1と同様に、車両検出・速度算出の処理を行う。このようにして、画角を広く確保し、画角内の複数の箇所で車両の検出を行うことにより、車両同士の隠蔽の影響を削減して、車両を検出する。また、このことは特に、複数の車線が存在する道路1の車線間、例えば図3に示したような、複数の車線1a、1b、1c、1dが存在する道路1の車線間においては、車両同士の隠蔽が発生しやすいため、さらに有効的である。次に、車両追跡部25は、複数の位置で検出した車両が同一車両か否かを、検出位置の時間的移り変わり、及び、速度算出部23にて検出された速度に基づいて車両を判定して車両の追跡を行う。次に、交通量情報統合部26は、追跡した車両の台数・速度に基づいて交通流計測値を求める。
【0021】
上記のように構成された実施の形態2の交通流計測装置によれば、上記実施の形態1と同様の効果を奏するのはもちろんのこと、撮影範囲を広げることができるため、監視範囲が広がる。このことにより、車両同士の隠蔽による影響が低減し、車両の検出の精度が向上する。
【0022】
実施の形態3.
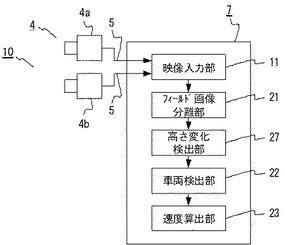
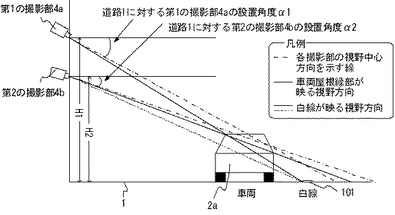
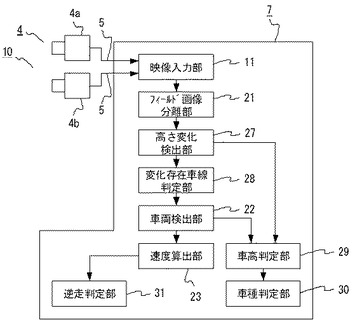
図6はこの発明の実施の形態3における交通流計測装置の構成を示す図、図7は図6に示した交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。撮影手段4は、複数の異なる所定高さ位置から道路1上の映像を撮影する第1及び第2の撮影部4a、4bを有する。この第1及び第2の撮影部4a、4bの高さ方向の差は、例えば1mくらいの高さ方向の差にて設置することが考えられる。そして、処理手段7は、第1及び第2の撮影部4a、4bの複数の異なる所定高さ位置からの道路1上の映像における視差を用いて、映像内の対象物の道路1面からの高さをそれぞれ求め、道路1上の影の影響を除く高さ変化検出部27を備えたものである。尚、ここで言う対象物とは、映像において、測定が可能なもの全てを指すものであり、車両はもちろんのこと、樹木や建物など、及び、それらの影など様々なものを含むものである。
【0023】
撮影手段4の第1及び第2の撮影部4a、4bを、複数の異なる所定高さ方向に配設した理由について説明する。ただ単に、2つの撮影部の視差のみを用いるのであれば、必ずしも、高さ方向に異なる位置とすることなく、ただ単に異なる位置でさえあれば、縦方向・横方向のいずれ異なる位置に配置しても、三角測量により距離を求めることは可能である。しかしながら、本実施の形態3においては、検出の対象としている被写体は、道路1を走行している車両であり、さらに、撮影手段4は道路1の横断方向に撮影を行っているものである。このため、車両は画面の横方向に移動することが前提となっており、高速で走行する車両は横方向に”ぶれ”を生じる可能性が高くなる。よって、複数の撮影部を例えば横方向に配置した場合、対応点(測定したい点)の特定において、映像の横方向の対応位置の特定が重要となり、この”ぶれ”が、複数の撮影部の映像の移動物体の対応位置の特定を困難とする。しかしながら、縦方向については”ぶれ”が生じにくくなるため、対応点の特定が容易となる。よって、移動物体の存在する奥行き距離の特定が容易、かつ、高精度に行うことができる。以上のことにより、撮影手段4の第1及び第2の撮影部4a、4bを、複数の異なる所定高さ方向に配設されているものである。
【0024】
次に、上記のように構成された実施の形態3の交通流計測装置の動作について説明する。尚、本実施の形態3においては、上記実施の形態1と異なる動作についてのみ説明する。他の動作は上記実施の形態1と同様に行うことができるためその説明は適宜省略する。まず、撮影手段4の第1及び第2の撮影部4a、4bは、上下方向に一定距離を離して同一方向、すなわち、道路1の横断方向に向けて撮影する。次に、処理手段7に入力された、第1及び第2の撮影部4a、4bからの映像は上記実施の形態1と同様の工程を経て高さ変化検出部27に入力される。そして、高さ変化検出部27では、各第1及び第2の撮影部4a、4bで撮影した映像の視差に基づいて、道路1面からの対象物の高さを検出する。次に、車両検出部22では、例えば、道路1面上に現れる道路の脇100の樹木や建物・車両等による影の領域を、この高さ情報を用いて除き、車両の領域を特定して、車両の検出を行う。
【0025】
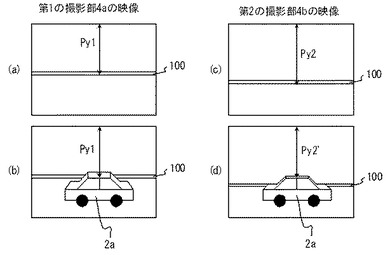
具体的な検出原理について、図8および図9に基づいて説明する。まず、道路1からの高さ位置を得る方法について説明する。例えば、図8に示すように第1及び第2の撮影部4a、4bを道路1からの高さH1および高さH2の位置に設置する。この高さH1は例えば8m程度であり、高さH1と高さH2との高さの差は例えば1m程度である。そして、第1及び第2の撮影部4a、4bの各設置角度α1、α2、第1及び第2の撮影部4a、4bのレンズ焦点距離・CCD素子サイズなどが既知の値としてあらかじめ存在する。そして、例えば第1及び第2の撮影部4a、4bの設置位置の直下の道路1位置から、既知の距離にある道路1上の白線101が、第1及び第2の撮影部4a、4bの映像中の画素位置として、例えば図9(a)、(c)に示すように、縦方向のPy1、Py2の位置があらかじめ計算で求めることができる。このような、道路1が映っていることを前提とした場合、第1及び第2の撮影部4a、4bの映像の対応画素位置(同じものが映る位置)はあらかじめ算出することができる。
【0026】
そして、高さのある車両2a(物体)が映像内に映った場合、各映像において対応する画素位置が変わる。例えば、図9(b)では、車両1aの屋根位置が第1の撮像部4aではPy1の位置に映っていたものが、図9(d)では、第2の撮像部4bではPy2からPy2’に対応画素位置が変わって映っている。このような対応位置のずれは、各映像中の小領域の相互相関を求めることで検出することができ、ずれがある場合には車両2a(物体)に高さがある、すなわち、道路1から高さを有するものではあるということが分かる。これに対し、例えば道路1上に映る影の場合には、道路1からの高さが0なので、第1及び第2の撮影部4a、4bの各映像における対応画素位置は変わらない。よって、検出対象は高さのある物体なので、高さが0である変化領域について除外することで、検出精度が向上できる。
【0027】
尚、ここではあらかじめ第1及び第2の撮影部4a、4bの道路1からの高さにおいて対応点を求めておく方法について説明したが、これに限られることはなく、第1及び第2の撮影部4a、4bの高さの差と第1及び第2の撮影部4a、4bの設置角度とは既知であり、これら第1及び第2の撮影部4a、4bに対して同じものが映っている画素位置が分かれば、一辺と両端の角とが決定する。よって、対象物の位置として、道路1からの高さ、および、第1及び第2の撮影部4a、4bを結ぶ辺からの垂直距離(奥行き距離)を求めることができる。これにより、影の除去・存在車線の特定がそれぞれ行うことができる。
【0028】
上記のように構成された実施の形態3の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、高さ方向の異なる位置から撮影された映像の視差に基づいて、車両を検出することができるため、車両の検出の精度が向上する。また、高さ方向の異なる位置から撮影された映像の視差を用いて、道路上の影の影響を除いているため、車両の検出の精度はより一層向上する。
【0029】
実施の形態4.
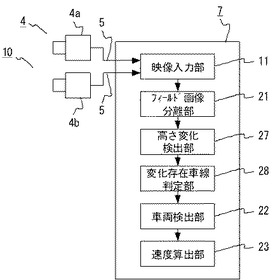
図10はこの発明の実施の形態4における交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。図において、処理手段7は、2つの撮影部4a、4bから得られる映像の視差に基づいて、変化領域の2つの撮影部4a、4bからの道路1の横断方向すなわち水平方向の距離を求め、変化領域が存在する車線位置を判断する変化存在車線判定部28を備える。
【0030】
次に、上記のように構成された実施の形態4の交通流計測装置の動作について説明する。尚、本実施の形態4においては、上記各実施の形態と異なる動作についてのみ説明する。他の動作は上記各実施の形態と同様に行うことができるためその説明は適宜省略する。まず、撮影手段4の第1及び第2の撮影部4a、4bは、上下方向に一定距離を離して同一方向、すなわち、道路1の横断方向に向けて撮影する。次に、処理手段7に入力された、第1及び第2の撮影部4a、4bからの映像は上記実施の形態3と同様の工程を経て変化存在車線判定部28に入力される。そして、変化存在車線判定部28では、2台の車両が奥行き方向(水平方向)に重なって見える場合、例えば、図3における車両2j及び車両2lのような場合、それぞれの車両2j、車両2lが部分的に視認できる状態であれば、この視認できる箇所の撮影手段4からの道路1の横断方向距離である水平距離を検出する。そして、この水平距離の差異より移動物体、例えば、車両2j及び車両2lが、異なる車線1e及び車線1d上にそれぞれ存在すると判断する。そして、この結果を用いて車両検出部22にて車両を検出する。
【0031】
上記のように構成された実施の形態4の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、高さ方向の異なる位置から撮影された映像の視差に基づいて、撮影手段からの水平方向距離を取得し、映像から車両同士の隠蔽を少なくして車両を検出することができるため、車両の検出の精度が向上できる。
【0032】
実施の形態5.
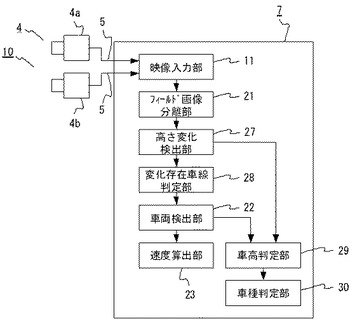
図11はこの発明の実施の形態5における交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。処理手段7は、高さ変化検出部27にて検出された高さの情報と、車両検出部22にて検出された車両の情報に基づいて、車両の道路1面からの高さを求める車高判定部29と、得られた高さの情報に基づいて車両の車種を判定する車種判定部30とを備える。
【0033】
次に、上記のように構成された実施の形態5の交通流計測装置の動作について説明する。尚、本実施の形態5においては、上記各実施の形態と異なる動作についてのみ説明する。他の動作は上記各実施の形態と同様に行うことができるためその説明は適宜省略する。まず、撮影手段4の第1及び第2の撮影部4a、4bは、上下方向に一定距離を離して同一方向、すなわち、道路1の横断方向に向けて撮影する。次に、処理手段7に入力された、第1及び第2の撮影部4a、4bからの映像は上記各実施の形態と同様の工程を経て、車両検出部22にて車両を検出する。次に、車高判定部29は、検出された車両の道路1面からの高さ(車高)を、高さ変化検出部27にて検出された高さの情報に基づいて求める。次に、車種判定部30は、この車高に基づいて車両の車種の判別を行う。尚、車高以外に、例えば車両の車長を求め、車高及び車長による車種判定すると、車種の判定の精度をより一層向上することができる。
【0034】
上記のように構成された実施の形態5の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、高さ方向の異なる位置から撮影された映像の視差により、車両の高さを計測することができ、これにより、車両の車高を求めることができ、車両の車種の判定を行うことが可能となる。よって、車種の判定を交通流計測に利用することが可能となる。
【0035】
実施の形態6.
図12はこの発明の実施の形態6における交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。処理手段7は、速度算出部23にて得られた速度の移動方向とあらかじめ保存されている道路1の走行すべき方向との情報より、これらが食い違う場合には車両が逆走していることを検知する逆走判定部31を備える。
【0036】
次に、上記のように構成された実施の形態6の交通流計測装置の動作について説明する。尚、本実施の形態6においては、上記各実施の形態と異なる動作についてのみ説明する。他の動作は上記各実施の形態と同様に行うことができるためその説明は適宜省略する。処理手段7の逆走判定部29は、速度算出部23にて得られた速度の移動方向と、あらかじめ保存されている道路1の走行すべき方向とを比較して、異なると判断した場合には、その車両が道路1を逆走していると判断して検知する。そして、例えば警報音、警報表示などの信号を発信することができる。
【0037】
上記のように構成された実施の形態6の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、危険事象である道路における車両の逆走を検出することができるため、交通流計測の有用性を高めることができる。
【符号の説明】
【0038】
1 道路、
2a,2b,2c,2d,2e,2f,2g,2h,2i,2j,2k,2l 車両、
4,40 撮影手段、4a 第1の撮影部、4b 第2の撮影部、
5 映像伝送ケーブル、6 支柱、7 処理手段、11 映像入力部、
21 フィールド画像分離部、22 車両検出部、23 速度算出部、
24 映像歪み補正部、27 高さ変化検出部、28 変化存在車線判定部、
29 車高判定部、30 車種判定部、31 逆走判定部、100 道路の脇。
【技術分野】
【0001】
この発明は、道路上を撮影した映像を用いて道路に走行する車両の台数・速度等の交通流を精度良く計測することができる交通流計測装置に関するものである。
【背景技術】
【0002】
従来の交通流計測装置は、道路脇に設置したカメラにて通行車両を車両の前方または後方から監視し、車両の通過と車両の走行速度を検出するものである(例えば、特許文献1参照)。また、他の従来の交通流計測装置では、道路走行車線上空に設置したカメラにて走行車両を撮影し、車両の通過を検出するとともに車両の長さより車種の判別を行うものである(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3853574号公報
【特許文献2】特開2001−216598号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の交通流計測装置は、車両の前方または後方から監視する場合には手前側の車両が奥側の車両を隠蔽する場合があり、車両検出率を低下させるという問題点があった。また、車線上空にカメラを設置する場合には、アームを適正に収納していないユニック車などの通行車両が車線上の構造物を破損する場合があり、また、カメラの清掃等のメンテナンスの場合に車線の通行止め規制を行う必要があるなど、機器保守上望ましくないという問題点があった。
【0005】
この発明は上記のような課題を解決するためになされたものであり、隠蔽による不具合を解消して車両の検出の精度を向上させ、かつ、破損の可能性を低減し、かつ、メンテナンスを簡便に行うことができる交通流計測装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、道路上を撮影した映像を用いて道路上に走行している車両を検出する交通流計測装置において、
道路の脇の所定高さ位置から道路の横断方向に道路上の映像を撮影する撮影手段と、
撮影手段にて撮影された道路上の映像を用いて道路上の車両を検出する処理手段とを備えたものである。
【発明の効果】
【0007】
この発明の交通流計測装置は、道路上を撮影した映像を用いて道路上に走行している車両を検出する交通流計測装置において、
道路の脇の所定高さ位置から道路の横断方向に道路上の映像を撮影する撮影手段と、
撮影手段にて撮影された道路上の映像を用いて道路上の車両を検出する処理手段とを備えたので、
車両の前後間の隠蔽の影響を少なくして車両の検出の精度を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1の交通流計測装置の構成を示す図である。
【図2】図1に示した交通流計測装置にて撮影する範囲の例を示す図である。
【図3】図1に示した交通流計測装置にて撮影された映像の例を示す図である。
【図4】図1に示した交通流計測装置の構成を示すブロック図である。
【図5】この発明の実施の形態2の交通流計測装置の構成を示すブロック図である。
【図6】この発明の実施の形態3の交通流計測装置の構成を示す図である。
【図7】図6に示した交通流計測装置の構成を示すブロック図である。
【図8】図6に示した交通流計測装置の交通流計測方法を説明するための図である。
【図9】図6に示した交通流計測装置の交通流計測方法を説明するための図である。
【図10】この発明の実施の形態4の交通流計測装置の構成を示すブロック図である。
【図11】この発明の実施の形態5の交通流計測装置の構成を示すブロック図である。
【図12】この発明の実施の形態6の交通流計測装置の構成を示すブロック図である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、本願発明の実施の形態について説明する。図1はこの発明の実施の形態1における交通流計測装置が道路の脇に設置された構成を示した図、図2は図1に示した交通流計測装置にて撮影する範囲の例を上面から示した図、図3は図1に示した交通流計測装置の撮影手段にて撮影した映像の例を示した図、図4は図1に示した交通流計測装置の構成を示すブロック図である。図において、交通流計測装置10は道路1上を撮影した映像を用いて道路1上に走行している車両2a〜車両2cを検出するものであり、撮影手段4及び処理手段7を備えている。そして、撮影手段4は、道路の脇100の所定高さ位置から道路1の横断方向に道路1上の映像を撮影するものであり、道路の脇100に配設され支柱6の所定高さに設置されている例えばCCTVカメラにてなる。このように設置された撮影手段4にて撮影される撮影範囲を上面から示すと、例えば図2の点線にて示したような撮影範囲となる。処理手段7は、撮影手段4の映像を映像伝送ケーブル5にて入力し、取り込んだ撮影手段4の映像を用いて車両を検出するものである。
【0010】
撮影手段4の道路の脇100の所定高さ位置とは、通常4〜8m程度の高さとなる。具体的には、道路1の横断方向の監視対象範囲としては、道路1の全車線の幅程度が想定される。よって、映像の縦方向の撮影範囲が、撮影手段4の設置位置から例えば4車線目、撮影手段4の位置から約20m先において、大型の車両の高さ3.5m程度が映ることを想定している。よって、このような所定高さ位置に撮影手段4を設定すると、4車線1a、1b、1c、1dからなる道路1において、例えば図3に示すように、画角を得ることができる。そして、図3に示すように、車両2d〜2lが撮影される。
【0011】
撮影手段4を道路1の横断方向に向けて設置して撮影する場合、道路1の撮影できる車両の走行方向に対する距離は、車両を後方または前方から監視する場合に比べ狭くなる。このため、車両の移動を検出するには非常に短い時間間隔で映像を撮影し、これらを比較する必要がある。撮影手段4は、インターレース方式と呼ばれる撮像方式を採用しており、記録された映像の横方向ラインは、縦方向に1ラインずつ飛ばしながら記録され、映像の下端まで到達した時点で再び映像の上端から前回飛ばしたラインの映像を記録していく。この上端から下端までの走査により得られる2枚の映像をフィールド画像と呼び、この2枚のフィールド画像より構成される1枚の画像をフレーム画像と呼び、フレーム画像は1秒間に約30枚記録される。
【0012】
この1枚のフレーム画像を構成する2枚のフィールド画像は、画像の上下方向に近接したラインにおいて、記録されるタイミングに約60分の1秒のずれがある。このため、移動している物体は約60分の1秒間の移動量だけ2枚のフィールド画像間で位置の違いが生じる。この60分の1秒間は、例えば160km/hなど非常に速い速度で走行する車両であっても、道路1の横断方向に向けて設置された撮影手段4の画角にて2枚のフィールド画像に充分に納まる時間間隔である。また、撮影手段4を道路1の横断方向に向けて設置しているため、車両の走行方向と画像の横方向とが一致しているため、従来の車両を前方または後方から監視する設置方法に比べて、フィールド画像間の比較による速度算出を行う場合、優れた精度にて算出することができる。
【0013】
処理手段7は、撮影手段4からの映像を取り込む映像入力部11と、インターレース化されて入力された映像をフィールド画像ごとに分離するフィールド画像分離部21と、フィールド画像分離部21より入力された2枚のフィールド画像を比較し、変化部分を抽出することにより移動部分が走行する車両であるとして検出する車両検出部22と、2枚のフィールド画像間の変化部分について画像中の移動量を算出し、さらに、撮影手段4の設置情報・カメラ画角情報などに基づいて車両の移動速度を算出する速度算出部23とにて構成されている。
【0014】
次に上記のように構成された実施の形態1の交通流計測装置の動作について説明する。まず、撮影手段4により撮影された例えば図3に示すようなフレーム画像が、映像伝送ケーブル5を介して、処理手段7の映像入力部11に入力される。次に、フィールド画像分離部21は、このインターレース化されて入力された映像である1枚のフレーム画像を、2枚のフィールド画像に分離する。次に、車両検出部22は、縦方向サイズがフレーム画像のサイズの2分の1のサイズとなっているこの2枚のフィールド画像について、対応する画素位置の輝度値の差の絶対値を取得する。そして、変化のある部分はこの差が大きな値をとる。よって、その大きな値をとる部分の差分画像を得る。この大きな値を持つ領域(差分画像)が、移動物体のある領域、すなわち、走行している車両の位置として検出する。
【0015】
次に、速度算出部23は、車両検出部22において検出された車両の領域に基づいて、2枚のフィールド画像間での相互相関計算によるマッチング処理を行い、最も一致する位置を探索する。このことにより、2枚のフィールド画像間での画像上の移動距離を得る。この画像上の移動距離により、あらかじめ与えされている、撮影手段4の画角情報・設置情報などに基づいてを道路1上での60分の1秒あたりの移動距離を算出し、車両の移動速度を算出する。
【0016】
尚、上記に示した処理を行うことにより、車両検出部22及び速度算出部23は、速度の速い車両に対して検出を行うことができる。また、速度の遅い車両に対しては、時間間隔の長い2つのフレーム画像、または、時間間隔の長いフィールド画像を用いて、上記に示した処理と同様の処理を行うことにより、速度の遅い車両に対しても車両検出性能・速度算出性能を確保することができる。また、本実施の形態1においては、インターレース化された複数のフィールド画像の差を用いる例を示したが、これに限られることはなく、異なる時点で撮像された、適切な時間間隔の複数の道路上の映像であれば、どのような映像を用いても上記実施の形態1と同様に行うことができ、同様の効果を奏することが可能である。
【0017】
上記実施の形態1の交通流計測装によれば、車両を前方または後方から監視する方法に比べて、車両の前後間の隠蔽の影響を少なくして検出することができる。また、撮影手段を道路の横断方向に向けることで追跡範囲が広く確保できない状態においても、車両の検出及び車両の速度を容易に算出することができる。また、撮影手段を道路の脇に設置しているため、車両による破損の可能性を低減し、かつ、メンテナンスを簡便に行うことができる。また、映像をインターレース化された複数のフィールド画像を用いるため、車両の検出及び車両の速度を一層容易に算出することができる。
【0018】
実施の形態2.
図5はこの発明の実施の形態2における交通流計測装置の構成を示すブロック図である。図において、上記実施の形態1と同様の部分は同一符号を付して説明を省略する。撮影手段40は、凸型レンズまたは超広角レンズなどの円筒型広角レンズにて撮影を行うものであり、他の構成は上記実施の形態1の撮影手段4と同様に構成されているものである。処理手段7は、フィールド画像分離部21と車両検出部22との間、凸型レンズまたは超広角レンズによる映像の歪みを補正する映像歪み補正部24と、車両検出部22にて複数の位置で検出した車両が同一車両か否かを検出位置の時間的移り変わり及び算出速度に基づいて車両を追跡判定する車両追跡部25と、追跡した車両の台数・速度に基づいて交通流計測値を求める交通量情報統合部26とを備えたものである。
【0019】
次に、上記のように構成された実施の形態2の交通流計測装置の動作について説明する。尚、本実施の形態2においては、上記実施の形態1と異なる動作についてのみ説明し、他の動作は上記実施の形態1と同様に行うことができるためその説明は適宜省略する。まず、上記実施の形態1の撮影手段4は、道路1の横断方向を向けて設置されているため通常のレンズでは監視範囲が狭いため、本実施の形態2においては撮影手段40には凸型レンズまたは超広角レンズを用いて撮影を行うことにより、監視範囲を広げる。そして、処理手段7の映像歪み補正部24では、凸型レンズまたは超広角レンズを用いて撮影された映像は歪みが生じているため、入力された映像の歪みを補正する。
【0020】
そして、歪みが補正された映像は、通常のレンズの場合、すなわち、上記実施の形態1と同様に、車両検出・速度算出の処理を行う。このようにして、画角を広く確保し、画角内の複数の箇所で車両の検出を行うことにより、車両同士の隠蔽の影響を削減して、車両を検出する。また、このことは特に、複数の車線が存在する道路1の車線間、例えば図3に示したような、複数の車線1a、1b、1c、1dが存在する道路1の車線間においては、車両同士の隠蔽が発生しやすいため、さらに有効的である。次に、車両追跡部25は、複数の位置で検出した車両が同一車両か否かを、検出位置の時間的移り変わり、及び、速度算出部23にて検出された速度に基づいて車両を判定して車両の追跡を行う。次に、交通量情報統合部26は、追跡した車両の台数・速度に基づいて交通流計測値を求める。
【0021】
上記のように構成された実施の形態2の交通流計測装置によれば、上記実施の形態1と同様の効果を奏するのはもちろんのこと、撮影範囲を広げることができるため、監視範囲が広がる。このことにより、車両同士の隠蔽による影響が低減し、車両の検出の精度が向上する。
【0022】
実施の形態3.
図6はこの発明の実施の形態3における交通流計測装置の構成を示す図、図7は図6に示した交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。撮影手段4は、複数の異なる所定高さ位置から道路1上の映像を撮影する第1及び第2の撮影部4a、4bを有する。この第1及び第2の撮影部4a、4bの高さ方向の差は、例えば1mくらいの高さ方向の差にて設置することが考えられる。そして、処理手段7は、第1及び第2の撮影部4a、4bの複数の異なる所定高さ位置からの道路1上の映像における視差を用いて、映像内の対象物の道路1面からの高さをそれぞれ求め、道路1上の影の影響を除く高さ変化検出部27を備えたものである。尚、ここで言う対象物とは、映像において、測定が可能なもの全てを指すものであり、車両はもちろんのこと、樹木や建物など、及び、それらの影など様々なものを含むものである。
【0023】
撮影手段4の第1及び第2の撮影部4a、4bを、複数の異なる所定高さ方向に配設した理由について説明する。ただ単に、2つの撮影部の視差のみを用いるのであれば、必ずしも、高さ方向に異なる位置とすることなく、ただ単に異なる位置でさえあれば、縦方向・横方向のいずれ異なる位置に配置しても、三角測量により距離を求めることは可能である。しかしながら、本実施の形態3においては、検出の対象としている被写体は、道路1を走行している車両であり、さらに、撮影手段4は道路1の横断方向に撮影を行っているものである。このため、車両は画面の横方向に移動することが前提となっており、高速で走行する車両は横方向に”ぶれ”を生じる可能性が高くなる。よって、複数の撮影部を例えば横方向に配置した場合、対応点(測定したい点)の特定において、映像の横方向の対応位置の特定が重要となり、この”ぶれ”が、複数の撮影部の映像の移動物体の対応位置の特定を困難とする。しかしながら、縦方向については”ぶれ”が生じにくくなるため、対応点の特定が容易となる。よって、移動物体の存在する奥行き距離の特定が容易、かつ、高精度に行うことができる。以上のことにより、撮影手段4の第1及び第2の撮影部4a、4bを、複数の異なる所定高さ方向に配設されているものである。
【0024】
次に、上記のように構成された実施の形態3の交通流計測装置の動作について説明する。尚、本実施の形態3においては、上記実施の形態1と異なる動作についてのみ説明する。他の動作は上記実施の形態1と同様に行うことができるためその説明は適宜省略する。まず、撮影手段4の第1及び第2の撮影部4a、4bは、上下方向に一定距離を離して同一方向、すなわち、道路1の横断方向に向けて撮影する。次に、処理手段7に入力された、第1及び第2の撮影部4a、4bからの映像は上記実施の形態1と同様の工程を経て高さ変化検出部27に入力される。そして、高さ変化検出部27では、各第1及び第2の撮影部4a、4bで撮影した映像の視差に基づいて、道路1面からの対象物の高さを検出する。次に、車両検出部22では、例えば、道路1面上に現れる道路の脇100の樹木や建物・車両等による影の領域を、この高さ情報を用いて除き、車両の領域を特定して、車両の検出を行う。
【0025】
具体的な検出原理について、図8および図9に基づいて説明する。まず、道路1からの高さ位置を得る方法について説明する。例えば、図8に示すように第1及び第2の撮影部4a、4bを道路1からの高さH1および高さH2の位置に設置する。この高さH1は例えば8m程度であり、高さH1と高さH2との高さの差は例えば1m程度である。そして、第1及び第2の撮影部4a、4bの各設置角度α1、α2、第1及び第2の撮影部4a、4bのレンズ焦点距離・CCD素子サイズなどが既知の値としてあらかじめ存在する。そして、例えば第1及び第2の撮影部4a、4bの設置位置の直下の道路1位置から、既知の距離にある道路1上の白線101が、第1及び第2の撮影部4a、4bの映像中の画素位置として、例えば図9(a)、(c)に示すように、縦方向のPy1、Py2の位置があらかじめ計算で求めることができる。このような、道路1が映っていることを前提とした場合、第1及び第2の撮影部4a、4bの映像の対応画素位置(同じものが映る位置)はあらかじめ算出することができる。
【0026】
そして、高さのある車両2a(物体)が映像内に映った場合、各映像において対応する画素位置が変わる。例えば、図9(b)では、車両1aの屋根位置が第1の撮像部4aではPy1の位置に映っていたものが、図9(d)では、第2の撮像部4bではPy2からPy2’に対応画素位置が変わって映っている。このような対応位置のずれは、各映像中の小領域の相互相関を求めることで検出することができ、ずれがある場合には車両2a(物体)に高さがある、すなわち、道路1から高さを有するものではあるということが分かる。これに対し、例えば道路1上に映る影の場合には、道路1からの高さが0なので、第1及び第2の撮影部4a、4bの各映像における対応画素位置は変わらない。よって、検出対象は高さのある物体なので、高さが0である変化領域について除外することで、検出精度が向上できる。
【0027】
尚、ここではあらかじめ第1及び第2の撮影部4a、4bの道路1からの高さにおいて対応点を求めておく方法について説明したが、これに限られることはなく、第1及び第2の撮影部4a、4bの高さの差と第1及び第2の撮影部4a、4bの設置角度とは既知であり、これら第1及び第2の撮影部4a、4bに対して同じものが映っている画素位置が分かれば、一辺と両端の角とが決定する。よって、対象物の位置として、道路1からの高さ、および、第1及び第2の撮影部4a、4bを結ぶ辺からの垂直距離(奥行き距離)を求めることができる。これにより、影の除去・存在車線の特定がそれぞれ行うことができる。
【0028】
上記のように構成された実施の形態3の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、高さ方向の異なる位置から撮影された映像の視差に基づいて、車両を検出することができるため、車両の検出の精度が向上する。また、高さ方向の異なる位置から撮影された映像の視差を用いて、道路上の影の影響を除いているため、車両の検出の精度はより一層向上する。
【0029】
実施の形態4.
図10はこの発明の実施の形態4における交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。図において、処理手段7は、2つの撮影部4a、4bから得られる映像の視差に基づいて、変化領域の2つの撮影部4a、4bからの道路1の横断方向すなわち水平方向の距離を求め、変化領域が存在する車線位置を判断する変化存在車線判定部28を備える。
【0030】
次に、上記のように構成された実施の形態4の交通流計測装置の動作について説明する。尚、本実施の形態4においては、上記各実施の形態と異なる動作についてのみ説明する。他の動作は上記各実施の形態と同様に行うことができるためその説明は適宜省略する。まず、撮影手段4の第1及び第2の撮影部4a、4bは、上下方向に一定距離を離して同一方向、すなわち、道路1の横断方向に向けて撮影する。次に、処理手段7に入力された、第1及び第2の撮影部4a、4bからの映像は上記実施の形態3と同様の工程を経て変化存在車線判定部28に入力される。そして、変化存在車線判定部28では、2台の車両が奥行き方向(水平方向)に重なって見える場合、例えば、図3における車両2j及び車両2lのような場合、それぞれの車両2j、車両2lが部分的に視認できる状態であれば、この視認できる箇所の撮影手段4からの道路1の横断方向距離である水平距離を検出する。そして、この水平距離の差異より移動物体、例えば、車両2j及び車両2lが、異なる車線1e及び車線1d上にそれぞれ存在すると判断する。そして、この結果を用いて車両検出部22にて車両を検出する。
【0031】
上記のように構成された実施の形態4の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、高さ方向の異なる位置から撮影された映像の視差に基づいて、撮影手段からの水平方向距離を取得し、映像から車両同士の隠蔽を少なくして車両を検出することができるため、車両の検出の精度が向上できる。
【0032】
実施の形態5.
図11はこの発明の実施の形態5における交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。処理手段7は、高さ変化検出部27にて検出された高さの情報と、車両検出部22にて検出された車両の情報に基づいて、車両の道路1面からの高さを求める車高判定部29と、得られた高さの情報に基づいて車両の車種を判定する車種判定部30とを備える。
【0033】
次に、上記のように構成された実施の形態5の交通流計測装置の動作について説明する。尚、本実施の形態5においては、上記各実施の形態と異なる動作についてのみ説明する。他の動作は上記各実施の形態と同様に行うことができるためその説明は適宜省略する。まず、撮影手段4の第1及び第2の撮影部4a、4bは、上下方向に一定距離を離して同一方向、すなわち、道路1の横断方向に向けて撮影する。次に、処理手段7に入力された、第1及び第2の撮影部4a、4bからの映像は上記各実施の形態と同様の工程を経て、車両検出部22にて車両を検出する。次に、車高判定部29は、検出された車両の道路1面からの高さ(車高)を、高さ変化検出部27にて検出された高さの情報に基づいて求める。次に、車種判定部30は、この車高に基づいて車両の車種の判別を行う。尚、車高以外に、例えば車両の車長を求め、車高及び車長による車種判定すると、車種の判定の精度をより一層向上することができる。
【0034】
上記のように構成された実施の形態5の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、高さ方向の異なる位置から撮影された映像の視差により、車両の高さを計測することができ、これにより、車両の車高を求めることができ、車両の車種の判定を行うことが可能となる。よって、車種の判定を交通流計測に利用することが可能となる。
【0035】
実施の形態6.
図12はこの発明の実施の形態6における交通流計測装置の構成を示すブロック図である。図において、上記各実施の形態と同様の部分は同一符号を付して説明を省略する。処理手段7は、速度算出部23にて得られた速度の移動方向とあらかじめ保存されている道路1の走行すべき方向との情報より、これらが食い違う場合には車両が逆走していることを検知する逆走判定部31を備える。
【0036】
次に、上記のように構成された実施の形態6の交通流計測装置の動作について説明する。尚、本実施の形態6においては、上記各実施の形態と異なる動作についてのみ説明する。他の動作は上記各実施の形態と同様に行うことができるためその説明は適宜省略する。処理手段7の逆走判定部29は、速度算出部23にて得られた速度の移動方向と、あらかじめ保存されている道路1の走行すべき方向とを比較して、異なると判断した場合には、その車両が道路1を逆走していると判断して検知する。そして、例えば警報音、警報表示などの信号を発信することができる。
【0037】
上記のように構成された実施の形態6の交通流計測装置によれば、上記各実施の形態と同様の効果を奏するのはもちろんのこと、危険事象である道路における車両の逆走を検出することができるため、交通流計測の有用性を高めることができる。
【符号の説明】
【0038】
1 道路、
2a,2b,2c,2d,2e,2f,2g,2h,2i,2j,2k,2l 車両、
4,40 撮影手段、4a 第1の撮影部、4b 第2の撮影部、
5 映像伝送ケーブル、6 支柱、7 処理手段、11 映像入力部、
21 フィールド画像分離部、22 車両検出部、23 速度算出部、
24 映像歪み補正部、27 高さ変化検出部、28 変化存在車線判定部、
29 車高判定部、30 車種判定部、31 逆走判定部、100 道路の脇。
【特許請求の範囲】
【請求項1】
道路上を撮影した映像を用いて上記道路上に走行している車両を検出する交通流計測装置において、
上記道路の脇の所定高さ位置から上記道路の横断方向に上記道路上の映像を撮影する撮影手段と、
上記撮影手段にて撮影された上記道路上の映像を用いて上記道路上の車両を検出する処理手段とを備えたことを特徴とする交通流計測装置。
【請求項2】
上記処理手段は、異なる時点で上記撮影手段にて撮影された複数の上記道路上の映像の差から上記道路上の車両を検出することを特徴とする請求項1に記載の交通流計測装置。
【請求項3】
上記撮影手段は、複数の異なる所定高さ位置から上記道路上の映像を撮影するものであり、
上記処理手段は、上記複数の異なる所定高さ位置からの上記道路上の映像における視差を用いて上記車両を検出することを特徴とする請求項1または請求項2に記載の交通流計測装置。
【請求項4】
上記処理手段は、上記複数の異なる所定高さ位置からの上記道路上の映像における視差を用いて、上記映像における対象物の上記道路面からの高さ情報を取得して、上記高さ情報に基づいて上記車両を検出することを特徴とする請求項3に記載の交通流計測装置。
【請求項5】
上記処理手段は、上記複数の異なる所定高さ位置からの上記道路上の映像の視差を用いて、上記車両の上記撮影手段からの水平方向距離を取得し、上記水平方向距離に基づいて上記車両を検出することを特徴とする請求項3または請求項4に記載の交通流計測装置。
【請求項6】
上記処理手段は、上記撮影手段からの水平方向距離が同距離にあるとして検出された上記車両の高さを検出することを特徴とする請求項4および請求項5に記載の交通流計測装置。
【請求項7】
上記処理手段は、上記撮影手段にて撮影された映像から検出された車両の進行方向が上記道路に定められた走行方向に対して逆方向であるか否かを判定することを特徴とする請求項1ないし請求項6のいずれか1項に記載の交通流計測装置。
【請求項8】
上記撮影手段は、円筒型広角レンズを用いて撮影を行うものであり、上記処理手段は映像の歪みを補正する映像歪み補正部を有し、歪みを補正した上記映像から上記車両を検出することを特徴とする請求項1ないし請求項7のいずれか1項に記載の交通流計測装置。
【請求項1】
道路上を撮影した映像を用いて上記道路上に走行している車両を検出する交通流計測装置において、
上記道路の脇の所定高さ位置から上記道路の横断方向に上記道路上の映像を撮影する撮影手段と、
上記撮影手段にて撮影された上記道路上の映像を用いて上記道路上の車両を検出する処理手段とを備えたことを特徴とする交通流計測装置。
【請求項2】
上記処理手段は、異なる時点で上記撮影手段にて撮影された複数の上記道路上の映像の差から上記道路上の車両を検出することを特徴とする請求項1に記載の交通流計測装置。
【請求項3】
上記撮影手段は、複数の異なる所定高さ位置から上記道路上の映像を撮影するものであり、
上記処理手段は、上記複数の異なる所定高さ位置からの上記道路上の映像における視差を用いて上記車両を検出することを特徴とする請求項1または請求項2に記載の交通流計測装置。
【請求項4】
上記処理手段は、上記複数の異なる所定高さ位置からの上記道路上の映像における視差を用いて、上記映像における対象物の上記道路面からの高さ情報を取得して、上記高さ情報に基づいて上記車両を検出することを特徴とする請求項3に記載の交通流計測装置。
【請求項5】
上記処理手段は、上記複数の異なる所定高さ位置からの上記道路上の映像の視差を用いて、上記車両の上記撮影手段からの水平方向距離を取得し、上記水平方向距離に基づいて上記車両を検出することを特徴とする請求項3または請求項4に記載の交通流計測装置。
【請求項6】
上記処理手段は、上記撮影手段からの水平方向距離が同距離にあるとして検出された上記車両の高さを検出することを特徴とする請求項4および請求項5に記載の交通流計測装置。
【請求項7】
上記処理手段は、上記撮影手段にて撮影された映像から検出された車両の進行方向が上記道路に定められた走行方向に対して逆方向であるか否かを判定することを特徴とする請求項1ないし請求項6のいずれか1項に記載の交通流計測装置。
【請求項8】
上記撮影手段は、円筒型広角レンズを用いて撮影を行うものであり、上記処理手段は映像の歪みを補正する映像歪み補正部を有し、歪みを補正した上記映像から上記車両を検出することを特徴とする請求項1ないし請求項7のいずれか1項に記載の交通流計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−224712(P2010−224712A)
【公開日】平成22年10月7日(2010.10.7)
【国際特許分類】
【出願番号】特願2009−69337(P2009−69337)
【出願日】平成21年3月23日(2009.3.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年10月7日(2010.10.7)
【国際特許分類】
【出願日】平成21年3月23日(2009.3.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]