
交通状況推定方法、交通状況推定装置及びコンピュータプログラム
【課題】交通状況計測装置が設置されていない道路区間の交通状況を、偶発的な交通事情の変化を考慮して正確に推定することができる交通状況推定装置を提供する。
【解決手段】道路区間の交通状況を推定する交通状況推定装置に、第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する第1取得手段と、自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する第2取得手段と、前記第1取得手段及び前記第2取得手段が取得した一の時間帯における各交通状況の相関を算出する相関算出手段と、該相関算出手段が算出した相関、及び前記第1取得手段が取得した他の時間帯における交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を推定する推定手段とを備える。
【解決手段】道路区間の交通状況を推定する交通状況推定装置に、第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する第1取得手段と、自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する第2取得手段と、前記第1取得手段及び前記第2取得手段が取得した一の時間帯における各交通状況の相関を算出する相関算出手段と、該相関算出手段が算出した相関、及び前記第1取得手段が取得した他の時間帯における交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を推定する推定手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路区間の交通状況を推定する交通状況推定方法、該交通状況推定方法を実施する交通状況推定装置、及びコンピュータに前記交通状況推定方法を実施させるコンピュータプログラムに関する。
【背景技術】
【0002】
所定の道路区間ごとに、自動車の交通量(単位時間当たりの通過台数)、走行速度、自動車による道路の占有率等の交通状況を計測し、その交通状況を交通情報センターに収集して、所定区間の旅行時間、渋滞度等を算出することが行われている。
【0003】
算出された所定区間の旅行時間、渋滞度等の情報は、交通管理者にとっては交通状態の把握又は動的経路誘導システム等において有益な情報となり、ドライバにとっては経路選択又は目的地への所要時間の見積もり等において有益な情報となる。
前記交通状況を計測する交通状況計測装置としては、超音波で走行している自動車を検知する車両感知器、路上を撮影するカメラ、車載通信機と双方向通信を行う路上ビーコン等が知られている。
【0004】
車両感知器は、交通量又は占有率等の交通の流れを計測するものであり、これらのデータから、渋滞度又は所定区間の旅行時間を算出する。
カメラは、自動車のプレートナンバーを読み取って車両を同定し、この車両が道路区間の一端を通過した時刻と、道路区間の他端を通過した時刻とから、所定区間の旅行時間を算出する。
路上ビーコンは、車載通信機との間で双方向通信することにより車両を同定し、この車両が道路区間の一端を通過した時刻と、道路区間の他端を通過した時刻とから、所定区間旅行時間を算出する。
【0005】
ところで、交通状況計測装置が設置されていない道路区間(以下、VICS非提供道路区間と言う)においては、交通状況を得ることができないという問題があった。この問題を解決すべく、GPS(Global Positioning System)を搭載した自動車に配された送信装置、例えば携帯電話等からの送信信号に基づいて、VICS非提供道路区間の交通状況を計測する方法が提案されている。
また、前記送信装置を搭載した自動車がVICS非提供道路区間を走行していない場合は、過去の一の時間帯に計測した交通状況、又は他のVICS非提供道路区間を走行している自動車からの送信信号を用いて、現時間帯の交通状況を統計的に算出する方法が考えられている。
【0006】
このようにVICS非提供道路区間の交通状況を推定することができれば、交通状況計測装置を全ての道路区間に設置する必要がなくなるため、インフラ整備の上で有利となる。
【特許文献1】特開2003−016570号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、自動車に配された送信装置を用いて交通状況を推定しているため、情報が間欠的であり、安定して正確に交通状況を推定することができないという問題があった。
また、過去に蓄積された統計データにて交通状況を推定する方法においては、一の時間帯、例えば1ヶ月前の交通状況のみに基づいて、現時間帯の交通状況を推定するため、偶発的な交通事情の変化に対応することができず、交通状況を正確に推定することができないという問題があった。例えば、非定期の集会、講演、コンサート等が開催されて交通量が上昇したとしても、過去の統計データを利用している限り、交通状況を正確に推定することはできない。
【0008】
本発明は、斯かる事情に鑑みてなされたものであり、交通状況計測装置が設置されていない道路区間の交通状況を、偶発的な交通事情の変化を考慮して、より正確に推定することができる交通状況推定方法、該交通状況推定方法を実施する交通状況推定装置、及びコンピュータに前記交通状況推定方法を実施させるコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明に係る交通状況推定装置は、道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定装置において、第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する第1取得手段と、自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する第2取得手段と、前記第1取得手段及び前記第2取得手段が取得した一の時間帯における各交通状況の相関を算出する相関算出手段と、該相関算出手段が算出した相関、及び前記第1取得手段(又は前記第2取得手段)が取得した他の時間帯における交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定する推定手段とを備えることを特徴とする。
【0010】
第2発明に係る交通状況推定装置は、前記送信信号に基づいて計測された前記第1道路区間の交通状況を取得する第3取得手段と、該第3取得手段が取得した交通状況及び前記第1取得手段が取得した交通状況の相関を表す値を算出する手段と、算出された相関を表す値が所定値以上であるか否かを判定する判定手段とを備え、前記相関算出手段は、前記判定手段が所定値以上であると判定した場合、前記第1道路区間及び前記第2道路区間の交通状況の相関を算出するようにしてあることを特徴とする。
【0011】
第3発明に係る交通状況推定装置は、前記第1取得手段は、複数の前記第1道路区間の交通状況を取得するようにしてあり、前記複数の第1道路区間の交通状況及び前記第2取得手段が取得した交通状況の相関を表す値を夫々算出する手段と、算出された相関を表す値に基づいて、一の第1道路区間を選択する手段とを備え、前記推定手段は、選択された一の第1道路区間及び前記第2道路区間に係る相関に基づいて交通状況を推定するようにしてあることを特徴とする。
【0012】
第4発明に係る交通状況推定装置は、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、前記第2道路区間の取得された交通状況に対して、前記算出手段が算出した交通状況が有する誤差、及び前記推定手段が推定した交通状況が有する誤差を算出する誤差算出手段と、該誤差算出手段が算出した各誤差を比較する手段と、比較結果に基づいて、誤差が小さい交通状況を選択する手段とを備えることを特徴とする。
【0013】
第5発明に係る交通状況推定装置は、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、該算出手段が算出した交通状況及び前記推定手段が推定した交通状況に重み係数を乗算して、交通状況の加重平均値を算出する平均値算出手段と、前記第2道路区間の取得された交通状況に対して、平均値算出手段が算出した加重平均値が有する誤差を算出する誤差算出手段と該誤差算出手段が算出した誤差に基づいて、重み係数を特定する特定手段とを備え、前記平均値算出手段は、特定した重み係数にて交通状況の加重平均値を算出するようにしてあることを特徴とする。
【0014】
第6発明に係る交通状況推定方法は、道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定方法において、第1道路区間に設置された交通状況計測装置の出力信号、及び自動車に配された送信装置から送信された送信信号に基づいて計測された前記第1道路区間及び交通状況計測装置が設置されていない第2道路区間の交通状況を取得し、取得された一の時間帯における前記第1道路区間及び前記第2道路区間の各交通状況の相関を算出し、算出した相関、及び取得された他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定することを特徴とする。
【0015】
第7発明に係るコンピュータプログラムは、コンピュータに、自動車の走行可能な第1道路区間及び第2道路区間の一の時間帯における交通状況に基づいて、他の時間帯における第1道路区間又は第2道路区間の交通状況を推定させるコンピュータプログラムであって、コンピュータに、一の時間帯における前記第1及び第2道路区間の各交通状況の相関を算出させるステップと、コンピュータに、算出した相関、及び他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定させるステップとを備えることを特徴とする。
【0016】
第1発明、第6発明及び第7発明にあっては、第1取得手段は、第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する。第1道路区間の交通状況は、交通状況計測装置にて計測されているため、交通状況計測装置が正常に稼働している限り、連続的に計測される。なお、道路区間は、自動車が走行できるように道路を区分したものであり、例えば一のリンク又は連続する複数のリンクを示している。リンクは、一般には隣り合う2つの交差点間の区間である。
一方、第2取得手段は、自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する。第2道路区間の交通状況は、送信装置が配された自動車が第2道路区間を走行したときに計測されるため、情報の欠損率が第1道路区間の交通状況に比して高い。なお、送信装置は、自動車の走行に関する情報を送信できる装置であり、例えば携帯電話のような無線通信装置である。また、送信装置は、必ずしも自動車に搭載されている必要はなく、自動車と伴に移動するように該自動車に配されていれば十分である。
本発明は、欠損率が高い第2道路区間の交通状況を、欠損率が低い第1道路区間の交通状況に基づいて推定するものである。相関算出手段は、第2道路区間の交通状況を推定すべく、第1取得手段が取得した一の時間帯における交通状況及び第2取得手段が取得した交通状況の相関を算出する。そして、推定手段は、算出された相関と、他の時間帯における第1道路区間の交通状況とに基づいて、該他の時間帯における第2道路区間の交通状況を推定する。
従って、第2道路区間の欠損した交通状況を推定することができる。
また、他の時間帯における第1道路区間の交通状況に基づいて、該他の時間帯における第2道路区間の交通状況を推定しているため、他の時間帯の交通事情の変化を反映させて、第2道路区間の交通状況を推定することができる。
更に、連続的に計測される第1道路区間の交通状況に基づいて、第2道路区間の交通状況を推定するため、安定的に交通状況を推定することができる。
更にまた、第1道路区間に設置された第1取得手段が取得した交通状況が、当該第1道路区間に設置された交通状況計測装置の故障、又は当該交通状況計測装置の出力信号を通信する際の異常によって欠損する場合がある。その場合に、第2道路区間の交通状況が計測されていれば、逆に、相関と当該第2道路区間の交通状況から第1道路区間の交通状況を推定することができる。
なお、上述の処理をコンピュータに実施させる第7発明に係るコンピュータプログラムは、記録媒体に記録されたコンピュータプログラム、通信ネットワーク、例えばインターネットを介して流通するコンピュータプログラム等を含むものである。
【0017】
第2発明にあっては、異なる方法で計測された第1道路区間の交通状況を、第1取得手段及び第3取得手段が取得する。第1取得手段は、交通状況計測装置の出力信号にて計測された交通状況を取得し、第3取得手段は、自動車に配された送信装置の送信信号に基づいて計測された交通状況を取得する。
第3取得手段が取得した交通状況は、欠損率が高いものの、実際に走行している自動車に配された送信装置から送信された送信信号に基づいて計測されているため、第1取得手段が取得した交通状況に比して信頼性が高い。例えば、第1取得手段は、交通状況計測装置が故障している場合、誤った交通状況を取得し続けるが、第3取得手段は、一部の自動車に配された送信装置が故障していたとしても、他の多くの自動車に配された送信装置が正常に動作していれば、多くの正確な交通状況を取得することができる。
そこで、第1道路区間について、信頼性が高い第3取得手段が取得した交通状況と、第1取得手段が取得した交通状況との相関を表す値を算出し、算出された相関を表す値が所定値以上であるか否かを判定する。相関を表す値が所定値以上である場合、第1取得手段が計測した交通状況には一定の信頼性があると判断される。この場合、相関算出手段は、第1取得手段が取得した交通状況及び第2取得手段が取得した交通状況に基づいて相関を算出する。そして、該相関に基づいて、交通状況を推定する。
従って、正常に稼働している交通状況計測装置にて計測された交通状況に基づいて、第1又は第2道路区間の交通状況を正確に推定することができる。
【0018】
第3発明にあっては、第1取得手段は、複数の第1道路区間の交通状況を取得する。そして、第2道路区間の交通状況を推定するために、適当な一の道路区間を選択する。具体的には、複数の第1道路区間の交通状況及び第2取得手段が取得した交通状況の相関を表す値を夫々算出し、算出された相関を表す値に基づいて、一の第1道路区間を選択する。例えば最も相関を表す値が高い第1道路区間を選択する。そして、推定手段は選択された一の第1道路区間及び第2道路区間に係る相関に基づいて、交通状況を推定する。
従って、相関を表す値が高い第1及び第2道路区間に係る相関に基づいて第2道路区間の交通状況を推定できるため、より正確に交通状況を推定することができる。
【0019】
第4発明にあっては、算出手段は、推定手段と異なる方法で、第2道路区間の交通状況を算出する。つまり、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における第2道路区間の交通状況に基づいて、他の時間帯における第2道路区間の交通状況を統計的に算出する。誤差算出手段は、第2道路区間で計測された検証用の交通状況に対して、算出手段が算出した交通状況が有する誤差を算出する。また、誤差算出手段は、検証用の交通状況に対して、推定手段が推定した交通状況が有する誤差を算出する。そして、各誤差を比較し、より誤差が小さい手法で算出された交通状況を選択する。
従って、交通事情に応じて、より信頼性が高い手法を選択して、第2道路区間の交通状況を推定又は算出することができる。
例えば、交通事情の偶発的な変化が無い場合、統計的に算出した交通状況の方が、相関にて推定した交通状況よりも正確である場合があり、このような場合、統計的な手法を選択する。逆に、交通事情の偶発的な変化が激しい場合、相関にて推定した交通状況の方がより正確であり、このような場合、推定による手法を選択する。
【0020】
第5発明にあっては、算出手段は、推定手段と異なる方法で、第2道路区間の交通状況を算出する。つまり、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における第2道路区間の交通状況に基づいて、他の時間帯における第2道路区間の交通状況を統計的に算出する。平均値算出手段は、算出手段が算出した交通状況及び前記推定手段が推定した交通状況に重み係数を乗算して、交通状況の加重平均値を算出する。誤差算出手段は、第2道路区間で計測された検証用の交通状況に対して、平均値算出手段が算出した加重平均値が有する誤差を特定する。そして、算出された誤差に基づいて、重み係数を特定する。例えば、誤差が最小になる重み係数を特定する。以後、前記平均値算出手段は、特定された重み係数にて交通状況の加重平均値を算出する。
従って、交通事情の偶発的な変化の度合いを重み係数にて評価し、統計的な手法及び推定による手法を組み合わせて、第2道路区間のより正確な交通状況を算出することができる。
【発明の効果】
【0021】
本発明によれば、交通状況計測装置が設置されていない第2道路区間の交通状況を、偶発的な交通事情の変化を考慮して、より正確に推定することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明をその実施の形態を示す図面に基づいて詳述する。
(実施の形態1)
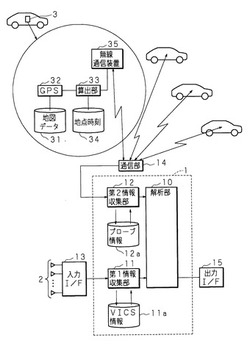
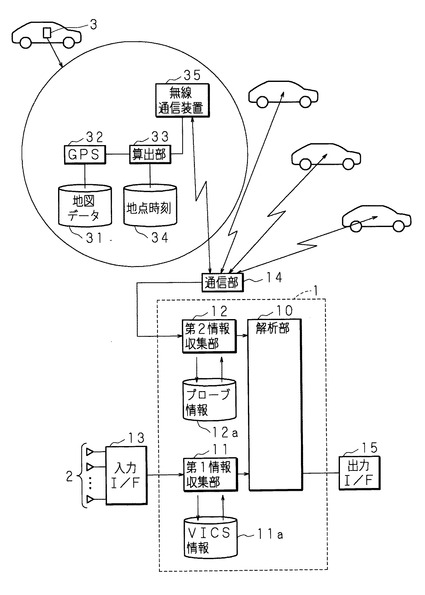
図1は、本発明の実施の形態1に係る交通状況推定システムの構成を示すブロック図である。本発明の実施の形態1に係る交通状況推定システムは、交通情報センターに設置された交通状況推定装置1と、交通状況を計測するために道路に設置された交通状況計測装置2と、自動車に搭載された車載装置3とを備えている。
【0023】
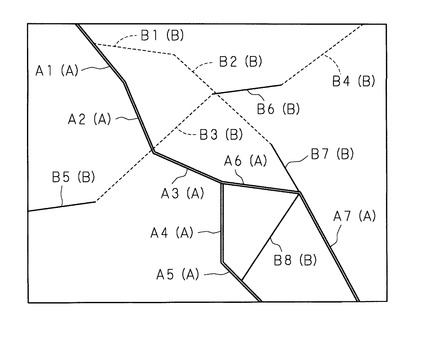
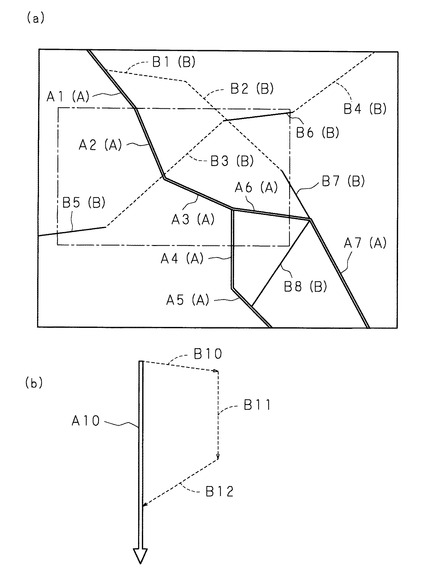
図2は、交通状況計測装置2の設置例を示す模式図である。道路は、交通状況計測装置2が設置された複数のVICS提供道路区間Aと、交通状況計測装置2が設置されていない複数のVICS非提供道路区間Bとに区分される。二重線部分はVICS提供道路区間Aを示しており、所定の矩形地図領域、いわゆるメッシュには、例えば7つのVICS提供道路区間A1,A2,A3,A4,A5,A6,A7が含まれている。実線部分及び破線部分はVICS非提供道路区間Bを示しており、所定の矩形地図領域には、例えば8つのVICS非提供道路区間B1,B2,B3,B4,B5,B6,B7,B8が含まれている。特に実線部分は、走行している自動車の車載機器によって、現時刻の交通状況を計測できるVICS非提供道路区間B5,B6,B7,B8であり、破線部分は、現時刻に自動車が走行しておらず、交通状況を計測できないVICS非提供道路区間B1,B2,B3,B4を示している。なお、VICS提供道路区間A及びVICS非提供道路区間Bは、一又は連続する複数のリンクを示している。リンクは、一般には隣り合う2つの交差点間の区間である。
【0024】
交通状況計測装置2は、例えば車両感知器であり、一定周期ごとに道路に超音波を発射して、超音波の反射時間を計測している。交通状況計測装置2の感知領域内を自動車が走行している場合、自動車が走行していない場合に比べて反射時間が短くなるため、反射時間を計測することで、自動車を検知することができる。交通状況計測装置2は、検出結果に係る出力信号を交通状況推定装置1へ出力する。
【0025】
車載装置3は、図1に示すようにGPS32と、算出部33と、地図データを記憶した地図データベース31と、自動車の走行位置を示す座標位置情報、走行している時刻を示す時刻情報を記憶するメモリ34と、無線通信装置35とを備えており、定期的に座標位置情報及び時刻情報を含む送信信号を送信するように構成されている。
【0026】
GPS32は、衛星から送信された信号を受信するGPS受信機、時計部等を備えており、受信した信号及び地図データベース31の地図データに基づいて、自動車の走行位置を算出部33に算出させ、算出させた走行位置を示す座標位置情報及び時刻情報をメモリ34に記憶させる。
無線通信装置35は、例えばGPS32システムに有線又は無線接続された携帯電話であり、自動車の座標位置情報、時刻情報及び自動車識別コード等を交通状況推定装置1へ送信する。自動車識別コードはGPS32が記憶している。
【0027】
交通状況推定装置1は、解析部10、第1情報収集部11、第2情報収集部12、第1記憶装置11a及び第2記憶装置12aを備えている。
【0028】
第1情報収集部11には、入力インタフェース13を介して複数の交通状況計測装置2が接続されており、入力インタフェース13は交通状況計測装置2から出力された出力信号を第1情報収集部11に与える。
第1情報収集部11は、交通状況計測装置2の出力信号に基づいて、自動車の速度、旅行時間等の交通状況(以下、VICS交通状況と言う)を計測し、VICS交通状況を示すVICS情報、該自動車が走行している道路区間を示す区間識別情報、及び時刻情報を第1記憶装置11aに記憶させる。また、第1情報収集部11は、解析部10からの要求に応じて第1記憶装置11aからVICS情報等を読み出して、解析部10に与える。
【0029】
第2情報収集部12には、通信部14が接続されており、通信部14は自動車に搭載された無線通信装置35から送信された送信信号を受信し、受信した送信信号を第2情報収集部12に与える。
第2情報収集部12は、通信部14が受信した送信信号に基づいて、自動車の速度、旅行時間等の交通状況(以下、プローブ交通状況と言う)を計測し、プローブ交通状況を示すプローブ情報、該自動車が走行している道路区間を示す区間識別情報、及び時刻情報を第2記憶装置12aに記憶させる。また、第2情報収集部12は、解析部10からの要求に応じて第2記憶装置12aからプローブ情報等を読み出して、解析部10に与える。
【0030】
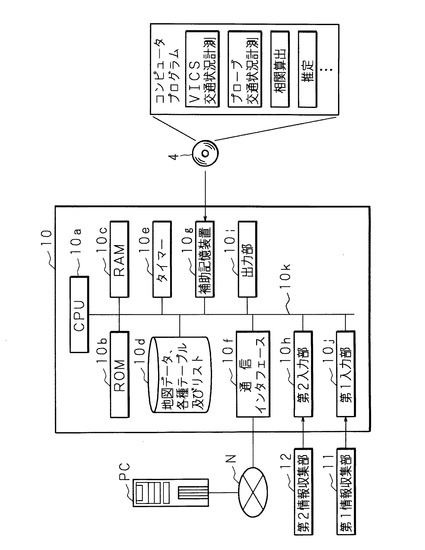
図3は、解析部10の構成を示すブロック図である。解析部10は、例えばマイクロコンピュータであり、CPU10aを備えている。CPU10aには、バス10kを介して、ROM10b、RAM10c、記憶装置10d、タイマー10e、通信インタフェース10f、補助記憶装置10g、第1入力部10j、第2入力部10h及び出力部10i等が接続されている。
【0031】
ROM10bは、不揮発性の半導体メモリであり、CPU10aが所定の処理を実行するために必要なコンピュータプログラムを記憶している。
【0032】
記憶装置10dは、例えばハードディスクであり、CPU10aが第1情報収集部11及び第2情報収集部12からVICS情報及びプローブ情報を読み出し、読み出した各情報に基づいて、VICS交通状況及びプローブ交通状況の相関を算出し、VICS非提道路区間の交通状況を推定する処理を実行するためのコンピュータプログラムを記憶している。
また、記憶装置10dは、推定基準対応テーブルを記憶している。推定基準対応テーブルは、各VICS非提供道路区間Bと、該VICS非提供道路区間Bの交通状況を推定するための推定基準となるVICS提供道路区間Aとを対応付けたテーブルである。
【0033】
CPU10aは、ROM10b及び記憶装置10dが記憶しているコンピュータプログラムを、一時記憶用のRAM10cに展開して実行することにより、交通状況を推定する処理を実行する。
【0034】
補助記憶装置10gは、CD−ROMドライブ、DVD(Digital Versatile Disc)ドライブ、MO(magnet Optical disk)ドライブ、BD(Blu-ray)ドライブ、HD−DVD(High Definition-DVD)ドライブ等であり、前記コンピュータプログラムを記憶している記録媒体から、該コンピュータプログラムを読み出して、記憶装置10dに記憶させる。記録媒体は、CD−ROM、DVD、BD、HD−DVD等である。
【0035】
通信インタフェース10fは、通信ネットワークN、例えばインターネットに接続するためのインタフェースである。CPU10aは、通信インタフェース10f及び通信ネットワークNを介して、外部コンピュータPCから前記コンピュータプログラムを取得し、取得したコンピュータプログラムを記憶装置10dに記憶させることができる。
【0036】
第1入力部10j及び第2入力部10hには、夫々第1情報収集部11及び第2情報収集部12が接続されている。CPU10aは、前記コンピュータプログラムを実行することにより、第1入力部10j及び第2入力部10hを介して、VICS情報、プローブ情報等を取得するように構成されている。
【0037】
出力部10iは、解析部10が推定した交通状況、各種情報、例えば渋滞情報、リンク旅行時間、区間旅行時間等を出力インタフェース15を介して外部へ出力する。例えば、各種情報を電波ビーコン、光ビーコン、FM多重放送局へ出力する。
【0038】
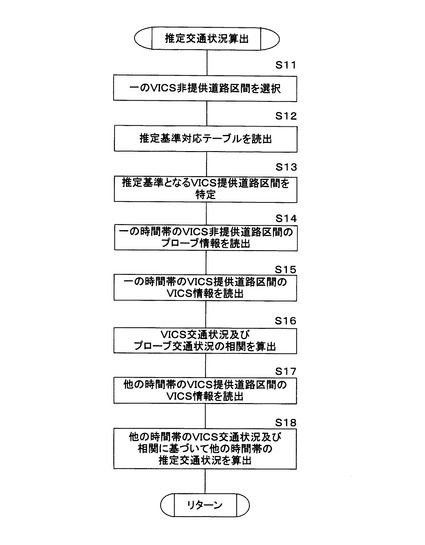
図4は、交通状況の推定に係る解析部10の処理手順を示すフローチャートである。
解析部10は、推定対象である一のVICS非提供道路区間Bを選択する(ステップS11)。例えばVICS非提供道路区間B1を選択する。
【0039】
そして、解析部10は、推定基準対応テーブルを読み出し(ステップS12)、推定基準対応テーブルに基づいてステップS11で選択した一のVICS非提供道路区間Bの推定基準となるVICS提供道路区間Aを特定する(ステップS13)。例えば、推定基準対応テーブルにおいてVICS非提供道路区間B1と、VICS提供道路区間A1とが対応づけられていた場合、VICS提供道路区間A1が特定される。
【0040】
次いで、解析部10は、前記一の時間帯のVICS非提供道路区間Bのプローブ情報を第2記憶装置12aから複数読み出す(ステップS14)。より具体的には、ステップS11で選択した一のVICS非提供道路区間Bを識別する区間識別情報及び一の時間帯を指定する情報を第2情報収集部12に与え、各情報に対応するプローブ情報を読み出す。
【0041】
そして、解析部10は、第1情報収集部11に制御信号を与え、一の時間帯におけるVICS提供道路区間AのVICS情報を第1記憶装置11aから複数読み出す(ステップS15)。より具体的には、ステップS13で特定したVICS提供道路区間Aを識別する区間識別情報、及び一の時間帯を指定する情報を第1情報収集部11に与え、各情報に対応するVICS情報を読み出す。時間帯は、例えば所定時刻と他の所定時刻との間の時刻、所定の曜日、月等を示している。
【0042】
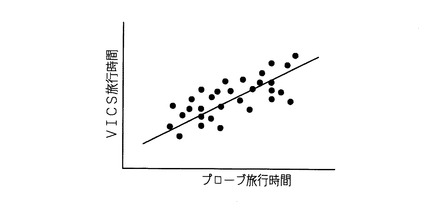
次いで、解析部10は、読み出したVICS情報及びプローブ情報に基づいて、VICS交通状況及びプローブ交通状況の相関を算出する(ステップS16)。相関は、例えば一次式を用い、最尤推定法にて算出する。なお、十分な量のサンプル及び解析部10の処理能力がある場合、高次の線形式、非線形式を用いて相関を算出するように構成しても良い。また、時間帯、昼夜、曜日、月、天候等の要素毎に相関を算出するようにしても良い。また、これらの要素を変数とする関数を算出するように構成しても良い。
【0043】
図5は、プローブ交通状況及びVICS交通状況の一例であるプローブ旅行時間及びVICS旅行時間の相関を示す相関図である。横軸はプローブ旅行時間を示しており、縦軸はVICS旅行時間を示している。黒丸のプロットは、複数の時刻におけるプローブ旅行時間及びVICS旅行時間を示している。
【0044】
次いで、解析部10は、他の時間帯における前記一のVICS提供道路区間AのVICS情報を読み出し(ステップS17)、前記他の時間帯のVICS交通状況と、ステップS16で算出した相関とに基づいて、前記他の時間帯におけるVICS非提供道路区間Bの交通状況(以下、推定交通状況と言う)を算出し(ステップS18)、交通状況の推定に係る処理を終える。
【0045】
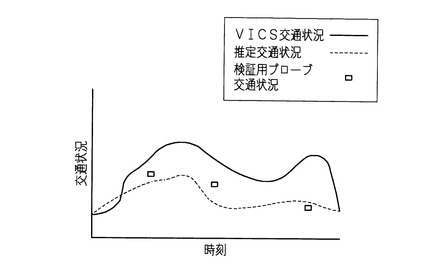
図6は、VICS交通状況及び推定交通状況を示すグラフである。横軸は時刻、縦軸は交通状況を示している。実線は、前記他の時間帯のVICS交通状況を示しており、破線は該VICS交通状況及び相関にて算出された推定交通状況を示している。また、四角のプロットは、前記他の時間帯で、VICS非提供道路区間Bにて計測された検証用のプローブ交通状況を示している。
【0046】
解析部10は、プローブ情報が得られていない時間帯におけるVICS非提供道路区間Bの交通状況を、該時間帯におけるVICS提供道路区間の交通状況に基づいて推定しているため、図6に示すようにVICS交通状況が大きく変動したとしても、VICS交通状況の変動を考慮して、VICS非提供道路区間の交通状況を推定することができる。
【0047】
次に、VICS推定基準対応テーブルの作成方法を説明する。解析部10は、はじめに交通状況計測装置2が正常に稼働しているVICS提供道路区間Aを特定し、特定されたVICS提供道路区間Aの中から、各VICS非提供道路区間Bの交通状況の推定に適した一のVICS道路区間を夫々対応付けた推定基準対応テーブルを作成する。以下、処理内容を具体的に説明する。
【0048】
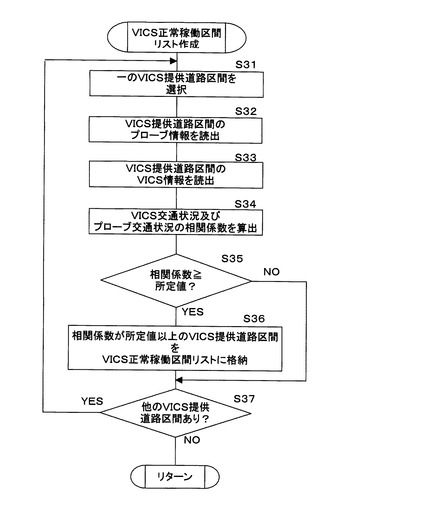
図7は、VICS正常稼動区間リストの作成に係る解析部10の処理手順を示すフローチャートである。
まず解析部10は、一のVICS提供道路区間Aを選択する(ステップS31)。複数のVICS提供道路区間Aの情報は、記憶装置10dが記憶している。
【0049】
そして、解析部10は、一の時間帯における同一のVICS提供道路区間Aのプローブ情報を第2記憶装置12aから読み出し(ステップS32)、前記一の時間帯におけるVICS提供道路区間AのVICS情報を第1記憶装置11aから読み出す(ステップS33)。
【0050】
次いで、解析部10は、読み出したVICS情報及びプローブ情報に基づいて、VICS交通状況及びプローブ交通状況の相関係数を算出する(ステップS34)。
【0051】
次いで、解析部10は、相関係数が所定値以上であるか否かを判定する(ステップS35)。所定値は、例えば0.8である。所定値以上であると判定した場合(ステップS35:YES)、相関係数が所定値以上のVICS交通状況を、VICS正常稼働区間リストに格納する(ステップS36)。VICS正常稼働区間リストは、記憶装置10dにて記憶されている。
【0052】
ステップS36の処理を終えた場合、又は相関係数が所定値未満であると判定した場合(ステップS35:NO)、解析部10は、相関係数未判定の他のVICS提供道路区間Aがあるか否かを判定する(ステップS37)。他のVICS提供道路区間Aがあると判定した場合(ステップS37:YES)、解析部10は、処理をステップS31に戻して、相関係数未判定のVICS提供道路区間Aについても同様の処理を実行する。他のVICS提供道路区間Aがないと判定した場合(ステップS37:NO)、解析部10は、VICS正常稼働区間リストの作成に係る処理を終える。
図7の処理によって、交通状況計測装置2が正常に稼働しているVICS提供道路区間Aを特定することができ、交通状況の推定に不適なVICS提供道路区間Aを排除することができる。
【0053】
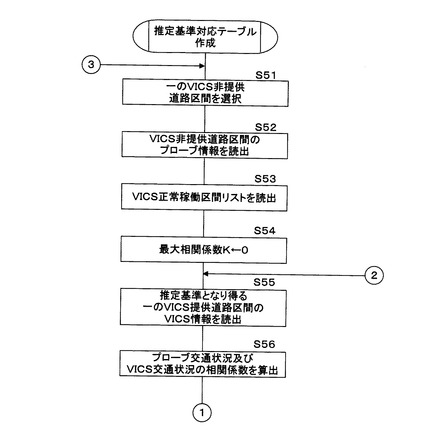
図8及び図9は、推定基準対応テーブルの作成に係るサブルーチンを示すフローチャートである。
解析部10は、一のVICS非提供道路区間Bを選択し(ステップS51)、一の時間帯におけるVICS非提供道路区間Bのプローブ情報を第2記憶装置12aから読み出す(ステップS52)。
【0054】
次いで、解析部10は、VICS正常稼働区間リストを読み出し(ステップS53)、変数である最大相関係数Kに0を設定する(ステップS54)。次いで、解析部10は、前記一の時間帯における、正常稼働している一のVICS提供道路区間AのVICS情報を第1記憶装置11aから読み出す(ステップS55)。
【0055】
そして、解析部10は、読み出したプローブ情報及びVICS情報に基づいて、プローブ交通状況及びVICS交通状況の相関係数を算出する(ステップS56)。
【0056】
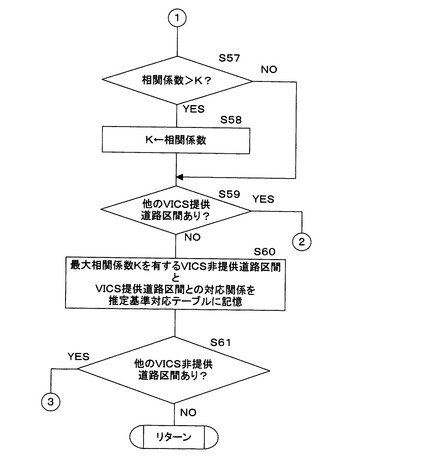
次いで、解析部10は、ステップS56で算出された相関係数が最大相関係数Kより大きいか否かを判定する(ステップS57)。相関係数が最大相関係数Kより大きいと判定した場合(ステップS57:YES)、解析部10は、最大相関係数Kに、ステップS56で算出した相関係数を代入する(ステップS58)。
【0057】
ステップS58の処理を終えた場合、又は相関係数が最大相関係数K以下であると判定した場合(ステップS57:NO)、解析部10は、推定基準となり得る他のVICS提供道路区間Aがあるか否かを判定する(ステップS59)。他のVICS提供道路区間Aがあると判定した場合(ステップS59:YES)、解析部10は、処理をステップS55へ戻す。
【0058】
他のVICS提供道路区間Aがないと判定した場合(ステップS59:NO)、解析部10は、最大相関係数Kを有するVICS非提供道路区間B及びVICS提供道路区間Aの対応関係を推定基準対応テーブルに記憶させる(ステップS60)。
【0059】
次いで、解析部10は、他のVICS非提供道路区間Bがあるか否かを判定する(ステップS61)。他のVICS非提供道路区間Bがあると判定した場合(ステップS61:YES)、解析部10は、処理をステップS51に戻す。他のVICS非提供道路区間Bがないと判定した場合(ステップS61:NO)、解析部10は、推定基準対応テーブルの作成に係る処理を終える。
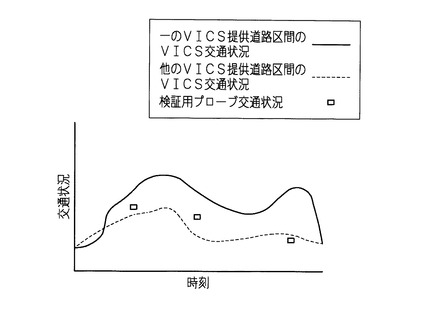
【0060】
図10は、2つのVICS提供道路区間Aと、VICS非提供道路区間Bとの相関関係を示すグラフである。横軸は時刻であり、縦軸は交通状況を示している。実線及び破線が2つのVICS提供道路区間AのVICS交通状況を示しており、四角のプロットはVICS非提供道路区間Bにおけるプローブ交通状況を示している。この場合、破線のVICS交通状況の方が、実線の交通状況より相関が高いため、破線で示すVICS提供道路区間Aが推定基準対応テーブルに記憶される。つまり、図8及び図9の処理によって、VICS非提供道路区間Bの交通状況の推定に最適なVICS提供道路区間Aを特定することができる。
【0061】
このように構成された交通状況推定方法、交通状況推定システム、交通状況推定装置1、コンピュータプログラムにあっては、交通状況計測装置2が設置されていないVICS非提供道路区間Bの交通状況を、偶発的な交通事情の変化を考慮して、正確に推定することができる。
【0062】
また、連続的に計測されるVICS提供道路区間Aの交通状況に基づいて、VICS非提供道路区間Bの交通状況を推定するため、安定して、該交通状況を推定することができる。
【0063】
更に、正常に稼働している交通状況計測装置2を用いて、VICS非提供道路区間Bの交通状況をより正確に推定することができる。
【0064】
更にまた、推定対象のVICS非提供道路区間Bと相関が高いVICS提供道路区間Aを選択して、VICS非提供道路区間Bの交通状況をより正確に推定することができる。
【0065】
図11は、推定基準となるVICS提供道路区間Aの選択に係る変形例を説明するための説明図である。実施の形態1にあっては、メッシュの矩形地図領域内で推定基準となるVICS提供道路区間Aを選択するように構成してあるが、図11(a)に示すように、メッシュより面積が小さい一点鎖線で示すエリア内で推定基準となるVICS提供道路区間Aを選択するように構成しても良い。
【0066】
また、図11(b)に示すように、VICS非提供道路区間B10,B11,B12に対して、併走するVICS提供道路区間A10を推定基準となるVICS提供道路区間Aとして選択するようにしても良い。
【0067】
また、実施の形態1では、交通状況計測装置の一例として車載感知器を説明したが、自動車の交通状況を計測できる装置であれば、他の計測装置、例えば電波ビーコン、光ビーコンを使用しても良い。
【0068】
更に、無線通信装置の一例として、携帯電話を説明したが、自動車の走行に関する情報を無線で送信できる装置であれば、他の装置であっても良い。また、必ずしも自動車に搭載されている必要はなく、自動車と伴に移動するように該自動車に配せば良い。
【0069】
更にまた、自動車に搭載されたGPSにて、自動車の座標位置情報を取得するように構成してあるが、携帯電話に搭載されたGPSにて同様の情報を取得し、交通状況推定装置1へ送信するように構成しても良い。
【0070】
更にまた、推定基準対応テーブルを図7及び図8の処理にて自動で作成するように構成してあるが、交通状況推定装置の使用者が推定基準対応テーブルを作成して、解析部の記憶装置に記憶させるようにしても良い。
更にまた、実施の形態1では、VICS提供道路区間のVICS交通状況に基づいて、VICS非提供道路区間の交通状況を推定する場合を説明したが、逆にVICS非提供道路区間のプローブ交通状況及び相関に基づいて、交通状況計測装置が故障しているVICS提供道路区間の交通状況を推定しても良い。
更にまた、実施の形態に係る交通状況推定装置は、第1情報収集部及び第1記憶装置を備えているが、各部を外部装置として構成し、外部の第1情報収集部で求まったVICS情報を取得するように構成しても良い。同様に、第2情報収集部及び第2記憶装置を備えているが、各部を外部装置として構成し、外部の第2情報収集部で求まったプローブ情報を取得するように構成しても良い。
更にまた、VICS交通状況とプローブ交通状況との相関を示す値として、相関係数を採用したが、該相関を表すことができる値であれば、他の値であっても良い。
【0071】
(実施の形態2)
実施の形態2に係る交通状況推定システムは、実施の形態1に係る交通状況推定システムと同様の構成を有しており、実施の形態1に係る推定方法と、従来方法とを比較し、より適当な方法を選択するように構成されている。処理内容のみが異なるため、以下では主に上記相違点について説明する。
【0072】
図12は、交通状況の推定に係る解析部10の処理手順を示すフローチャートである。まず、解析部10は、本発明の実施の形態1に係る推定交通状況の算出に係るサブルーチンを呼び出して、一のVICS非提供道路区間Bにおける所定検証時刻の推定交通状況を算出する(ステップS71)。推定交通状況の算出は、図4に示す処理手順にて行われる。
【0073】
そして、解析部10は、VICS非提供道路区間Bのプローブ交通状況に基づいて、統計的に所定検証時刻の交通状況(以下、統計交通状況と言う)を算出する(ステップS72)。例えば、交通上状況の平均値、中央値、最頻値等を算出する。
【0074】
次いで、解析部10は、検証用のプローブ情報、即ち一のVICS非提供道路区間Bにおける所定検証時刻のプローブ情報を第2記憶装置12aから読み出す(ステップS73)。
【0075】
次いで、解析部10は、検証用のプローブ交通状況に対する推定交通状況の誤差を算出し(ステップS74)、検証用のプローブ交通状況に対する統計交通状況の誤差を算出する(ステップS75)。
【0076】
次いで、解析部10は、推定交通状況の誤差が統計交通状況の誤差以上であるか否かを判定する(ステップS76)。推定交通状況の誤差が統計交通状況の誤差以上であると判定した場合(ステップS76:YES)、解析部10は、本発明に係る推定交通状況の算出に係るサブルーチンを呼び出して、他の時間帯における推定交通状況を算出する(ステップS77)。推定交通状況の誤差が統計交通状況の誤差以上でないと判定した場合(ステップS76:NO)、解析部10は、従来の統計的方法にて、他の時間帯における統計交通状況を算出する(ステップS78)。つまり、より信頼性が高い手法を用いて、VICS非提供道路区間Bの交通状況を推定する。
【0077】
実施の形態2に係る交通状況推定方法、交通状況推定システム、交通状況推定装置1、コンピュータプログラムにあっては、実施の形態1に係る手法と、従来の統計的手法とを比較し、より信頼性が高い手法を選択して、VICS非提供道路区間Bの交通状況を推定するように構成しているため、実施の形態1に比して、VICS非提供道路区間Bの交通状況をより正確に算出することができる。
【0078】
なお、実施の形態2にあっては、実施の形態1に係る推定方法と異なる方法として、統計的手法を説明したが、前記推定方法と異なる手法であれば、他の方法であっても良い。交通状況推定装置の使用者が用意した交通情報の推定結果を記憶装置に記憶させ、該交通情報を使用するように構成しても良い。
【0079】
実施の形態2に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの他の構成、作用及び効果は実施の形態1に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの構成、作用及び効果と同様であるため、対応する箇所には同様の符号を付して詳細な説明を省略する。
【0080】
(実施の形態3)
実施の形態3に係る交通状況推定システムは、実施の形態1に係る交通状況推定システムと同様の構成を有しており、実施の形態1に係る推定方法と、従来方法とを組み合わせて、VICS非提供道路区間Bの交通状況を算出するように構成されている。処理内容のみが異なるため、以下では主に上記相違点について説明する。
【0081】
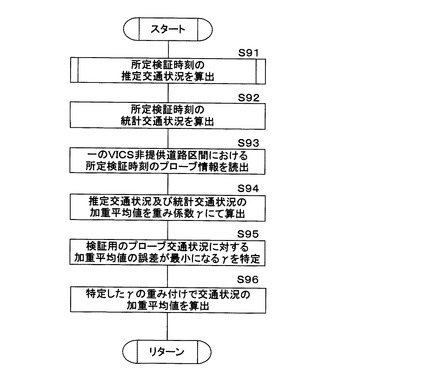
図13は、交通状況の推定に係る解析部10の処理手順を示すフローチャートである。まず、解析部10は、本発明の実施の形態1に係る推定交通状況の算出に係るサブルーチンを呼び出して、一のVICS非提供道路区間Bにおける所定検証時刻の推定交通状況を算出する(ステップS91)。
【0082】
そして、解析部10は、VICS非提供道路区間Bのプローブ交通状況に基づいて、統計的に統計交通状況を算出する(ステップS92)。
【0083】
次いで、解析部10は、検証用のプローブ情報、即ち一のVICS非提供道路区間Bにおける所定検証時刻のプローブ情報を第2記憶装置12aから読み出す(ステップS93)。
【0084】
次いで、解析部10は、推定交通状況及び統計交通状況に重み係数γを乗算して、交通状況の加重平均値を算出する(ステップS94)。例えば、加重平均値は、加重平均値をAvとした場合、Av=統計交通状況×(1−γ)+推定交通状況×γの式で表される。
【0085】
次いで、解析部10は、検証用のプローブ交通状況に対する加重平均値の誤差が最小になるγを特定する(ステップS95)。具体的には、Σ(Av−Sn)=(Av−S1)+(Av−S2)+・・・+(Av−Sn)が極小になるγを最尤推定法等で特定する。なお、Snはn個の検証用のプローブ交通状況S1,S2,・・・,Snを示している。
【0086】
そして、特定した重み係数γで、他の時間帯における交通状況の加重平均値を算出する(ステップS96)。
【0087】
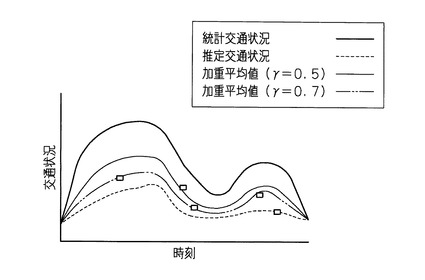
図14は、重み係数γを乗算して得た交通状況の加重平均値、推定交通状況及び統計交通状況を示すグラフである。横軸は時刻であり、縦軸は交通状況を示している。太線は、従来の統計的手法にて算出した統計交通状況であり、破線は本発明の実施の形態1に係る方法で算出した推定交通状況である。そして、細線及び二点鎖線は、夫々重み係数γ=0.5及び0.7にて算出した交通状況の加重平均値を示している。
【0088】
実施の形態3に係る交通状況推定方法、交通状況推定システム、交通状況推定装置1、コンピュータプログラムにあっては、交通事情の偶発的な変化の度合いを重み係数γにて評価し、実施の形態1に係る推定による手法と、従来の統計的な手法とを組み合わせて、VICS非提供道路区間Bの交通状況をより正確に算出することができる。
なお、実施の形態1にあっては、加算平均を算出するように構成してあるが、重み付けをして、各方法を組み合わせることができれば、相乗平均等、他の方法で交通状況を算出するように構成しても良い。
【0089】
実施の形態3に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの他の構成、作用及び効果は実施の形態1に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの構成、作用及び効果と同様であるため、対応する箇所には同様の符号を付して詳細な説明を省略する。
また、今回開示された実施の形態1乃至3は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0090】
【図1】本発明の実施の形態1に係る交通状況推定システムの構成を示すブロック図である。
【図2】交通状況計測装置の設置例を示す模式図である。
【図3】解析部の構成を示すブロック図である。
【図4】交通状況の推定に係る解析部の処理手順を示すフローチャートである。
【図5】プローブ交通状況及びVICS交通状況の一例であるプローブ旅行時間及びVICS旅行時間の相関を示す相関図である。
【図6】VICS交通状況及び推定交通状況を示すグラフである。
【図7】VICS正常稼動区間リストの作成に係る解析部の処理手順を示すフローチャートである。
【図8】推定基準対応テーブルの作成に係るサブルーチンを示すフローチャートである。
【図9】推定基準対応テーブルの作成に係るサブルーチンを示すフローチャートである。
【図10】2つのVICS提供道路区間と、VICS非提供道路区間との相関関係を示すグラフである。
【図11】推定基準となるVICS提供道路区間の選択に係る変形例を説明するための説明図である。
【図12】交通状況の推定に係る解析部の処理手順を示すフローチャートである。
【図13】交通状況の推定に係る解析部の処理手順を示すフローチャートである。
【図14】重み係数γを乗算して得た交通状況の加重平均値、推定交通状況及び統計交通状況を示すグラフである。
【符号の説明】
【0091】
1 交通状況推定装置
2 交通状況計測装置
3 車載装置
4 記憶媒体
10 解析部(相関算出手段,推定手段)
10d 記憶装置
11 第1情報収集部
11a 第1記憶装置
12 第2情報収集部
12a 第2記憶装置
13 入力インタフェース
14 通信部
15 出力インタフェース
31 地図データベース
32 GPS
33 算出部
34 メモリ
35 無線通信装置(送信装置)
A VICS提供道路区間(第1道路区間)
B VICS非提供道路区間(第2道路区間)
【技術分野】
【0001】
本発明は、道路区間の交通状況を推定する交通状況推定方法、該交通状況推定方法を実施する交通状況推定装置、及びコンピュータに前記交通状況推定方法を実施させるコンピュータプログラムに関する。
【背景技術】
【0002】
所定の道路区間ごとに、自動車の交通量(単位時間当たりの通過台数)、走行速度、自動車による道路の占有率等の交通状況を計測し、その交通状況を交通情報センターに収集して、所定区間の旅行時間、渋滞度等を算出することが行われている。
【0003】
算出された所定区間の旅行時間、渋滞度等の情報は、交通管理者にとっては交通状態の把握又は動的経路誘導システム等において有益な情報となり、ドライバにとっては経路選択又は目的地への所要時間の見積もり等において有益な情報となる。
前記交通状況を計測する交通状況計測装置としては、超音波で走行している自動車を検知する車両感知器、路上を撮影するカメラ、車載通信機と双方向通信を行う路上ビーコン等が知られている。
【0004】
車両感知器は、交通量又は占有率等の交通の流れを計測するものであり、これらのデータから、渋滞度又は所定区間の旅行時間を算出する。
カメラは、自動車のプレートナンバーを読み取って車両を同定し、この車両が道路区間の一端を通過した時刻と、道路区間の他端を通過した時刻とから、所定区間の旅行時間を算出する。
路上ビーコンは、車載通信機との間で双方向通信することにより車両を同定し、この車両が道路区間の一端を通過した時刻と、道路区間の他端を通過した時刻とから、所定区間旅行時間を算出する。
【0005】
ところで、交通状況計測装置が設置されていない道路区間(以下、VICS非提供道路区間と言う)においては、交通状況を得ることができないという問題があった。この問題を解決すべく、GPS(Global Positioning System)を搭載した自動車に配された送信装置、例えば携帯電話等からの送信信号に基づいて、VICS非提供道路区間の交通状況を計測する方法が提案されている。
また、前記送信装置を搭載した自動車がVICS非提供道路区間を走行していない場合は、過去の一の時間帯に計測した交通状況、又は他のVICS非提供道路区間を走行している自動車からの送信信号を用いて、現時間帯の交通状況を統計的に算出する方法が考えられている。
【0006】
このようにVICS非提供道路区間の交通状況を推定することができれば、交通状況計測装置を全ての道路区間に設置する必要がなくなるため、インフラ整備の上で有利となる。
【特許文献1】特開2003−016570号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、自動車に配された送信装置を用いて交通状況を推定しているため、情報が間欠的であり、安定して正確に交通状況を推定することができないという問題があった。
また、過去に蓄積された統計データにて交通状況を推定する方法においては、一の時間帯、例えば1ヶ月前の交通状況のみに基づいて、現時間帯の交通状況を推定するため、偶発的な交通事情の変化に対応することができず、交通状況を正確に推定することができないという問題があった。例えば、非定期の集会、講演、コンサート等が開催されて交通量が上昇したとしても、過去の統計データを利用している限り、交通状況を正確に推定することはできない。
【0008】
本発明は、斯かる事情に鑑みてなされたものであり、交通状況計測装置が設置されていない道路区間の交通状況を、偶発的な交通事情の変化を考慮して、より正確に推定することができる交通状況推定方法、該交通状況推定方法を実施する交通状況推定装置、及びコンピュータに前記交通状況推定方法を実施させるコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明に係る交通状況推定装置は、道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定装置において、第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する第1取得手段と、自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する第2取得手段と、前記第1取得手段及び前記第2取得手段が取得した一の時間帯における各交通状況の相関を算出する相関算出手段と、該相関算出手段が算出した相関、及び前記第1取得手段(又は前記第2取得手段)が取得した他の時間帯における交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定する推定手段とを備えることを特徴とする。
【0010】
第2発明に係る交通状況推定装置は、前記送信信号に基づいて計測された前記第1道路区間の交通状況を取得する第3取得手段と、該第3取得手段が取得した交通状況及び前記第1取得手段が取得した交通状況の相関を表す値を算出する手段と、算出された相関を表す値が所定値以上であるか否かを判定する判定手段とを備え、前記相関算出手段は、前記判定手段が所定値以上であると判定した場合、前記第1道路区間及び前記第2道路区間の交通状況の相関を算出するようにしてあることを特徴とする。
【0011】
第3発明に係る交通状況推定装置は、前記第1取得手段は、複数の前記第1道路区間の交通状況を取得するようにしてあり、前記複数の第1道路区間の交通状況及び前記第2取得手段が取得した交通状況の相関を表す値を夫々算出する手段と、算出された相関を表す値に基づいて、一の第1道路区間を選択する手段とを備え、前記推定手段は、選択された一の第1道路区間及び前記第2道路区間に係る相関に基づいて交通状況を推定するようにしてあることを特徴とする。
【0012】
第4発明に係る交通状況推定装置は、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、前記第2道路区間の取得された交通状況に対して、前記算出手段が算出した交通状況が有する誤差、及び前記推定手段が推定した交通状況が有する誤差を算出する誤差算出手段と、該誤差算出手段が算出した各誤差を比較する手段と、比較結果に基づいて、誤差が小さい交通状況を選択する手段とを備えることを特徴とする。
【0013】
第5発明に係る交通状況推定装置は、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、該算出手段が算出した交通状況及び前記推定手段が推定した交通状況に重み係数を乗算して、交通状況の加重平均値を算出する平均値算出手段と、前記第2道路区間の取得された交通状況に対して、平均値算出手段が算出した加重平均値が有する誤差を算出する誤差算出手段と該誤差算出手段が算出した誤差に基づいて、重み係数を特定する特定手段とを備え、前記平均値算出手段は、特定した重み係数にて交通状況の加重平均値を算出するようにしてあることを特徴とする。
【0014】
第6発明に係る交通状況推定方法は、道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定方法において、第1道路区間に設置された交通状況計測装置の出力信号、及び自動車に配された送信装置から送信された送信信号に基づいて計測された前記第1道路区間及び交通状況計測装置が設置されていない第2道路区間の交通状況を取得し、取得された一の時間帯における前記第1道路区間及び前記第2道路区間の各交通状況の相関を算出し、算出した相関、及び取得された他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定することを特徴とする。
【0015】
第7発明に係るコンピュータプログラムは、コンピュータに、自動車の走行可能な第1道路区間及び第2道路区間の一の時間帯における交通状況に基づいて、他の時間帯における第1道路区間又は第2道路区間の交通状況を推定させるコンピュータプログラムであって、コンピュータに、一の時間帯における前記第1及び第2道路区間の各交通状況の相関を算出させるステップと、コンピュータに、算出した相関、及び他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定させるステップとを備えることを特徴とする。
【0016】
第1発明、第6発明及び第7発明にあっては、第1取得手段は、第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する。第1道路区間の交通状況は、交通状況計測装置にて計測されているため、交通状況計測装置が正常に稼働している限り、連続的に計測される。なお、道路区間は、自動車が走行できるように道路を区分したものであり、例えば一のリンク又は連続する複数のリンクを示している。リンクは、一般には隣り合う2つの交差点間の区間である。
一方、第2取得手段は、自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する。第2道路区間の交通状況は、送信装置が配された自動車が第2道路区間を走行したときに計測されるため、情報の欠損率が第1道路区間の交通状況に比して高い。なお、送信装置は、自動車の走行に関する情報を送信できる装置であり、例えば携帯電話のような無線通信装置である。また、送信装置は、必ずしも自動車に搭載されている必要はなく、自動車と伴に移動するように該自動車に配されていれば十分である。
本発明は、欠損率が高い第2道路区間の交通状況を、欠損率が低い第1道路区間の交通状況に基づいて推定するものである。相関算出手段は、第2道路区間の交通状況を推定すべく、第1取得手段が取得した一の時間帯における交通状況及び第2取得手段が取得した交通状況の相関を算出する。そして、推定手段は、算出された相関と、他の時間帯における第1道路区間の交通状況とに基づいて、該他の時間帯における第2道路区間の交通状況を推定する。
従って、第2道路区間の欠損した交通状況を推定することができる。
また、他の時間帯における第1道路区間の交通状況に基づいて、該他の時間帯における第2道路区間の交通状況を推定しているため、他の時間帯の交通事情の変化を反映させて、第2道路区間の交通状況を推定することができる。
更に、連続的に計測される第1道路区間の交通状況に基づいて、第2道路区間の交通状況を推定するため、安定的に交通状況を推定することができる。
更にまた、第1道路区間に設置された第1取得手段が取得した交通状況が、当該第1道路区間に設置された交通状況計測装置の故障、又は当該交通状況計測装置の出力信号を通信する際の異常によって欠損する場合がある。その場合に、第2道路区間の交通状況が計測されていれば、逆に、相関と当該第2道路区間の交通状況から第1道路区間の交通状況を推定することができる。
なお、上述の処理をコンピュータに実施させる第7発明に係るコンピュータプログラムは、記録媒体に記録されたコンピュータプログラム、通信ネットワーク、例えばインターネットを介して流通するコンピュータプログラム等を含むものである。
【0017】
第2発明にあっては、異なる方法で計測された第1道路区間の交通状況を、第1取得手段及び第3取得手段が取得する。第1取得手段は、交通状況計測装置の出力信号にて計測された交通状況を取得し、第3取得手段は、自動車に配された送信装置の送信信号に基づいて計測された交通状況を取得する。
第3取得手段が取得した交通状況は、欠損率が高いものの、実際に走行している自動車に配された送信装置から送信された送信信号に基づいて計測されているため、第1取得手段が取得した交通状況に比して信頼性が高い。例えば、第1取得手段は、交通状況計測装置が故障している場合、誤った交通状況を取得し続けるが、第3取得手段は、一部の自動車に配された送信装置が故障していたとしても、他の多くの自動車に配された送信装置が正常に動作していれば、多くの正確な交通状況を取得することができる。
そこで、第1道路区間について、信頼性が高い第3取得手段が取得した交通状況と、第1取得手段が取得した交通状況との相関を表す値を算出し、算出された相関を表す値が所定値以上であるか否かを判定する。相関を表す値が所定値以上である場合、第1取得手段が計測した交通状況には一定の信頼性があると判断される。この場合、相関算出手段は、第1取得手段が取得した交通状況及び第2取得手段が取得した交通状況に基づいて相関を算出する。そして、該相関に基づいて、交通状況を推定する。
従って、正常に稼働している交通状況計測装置にて計測された交通状況に基づいて、第1又は第2道路区間の交通状況を正確に推定することができる。
【0018】
第3発明にあっては、第1取得手段は、複数の第1道路区間の交通状況を取得する。そして、第2道路区間の交通状況を推定するために、適当な一の道路区間を選択する。具体的には、複数の第1道路区間の交通状況及び第2取得手段が取得した交通状況の相関を表す値を夫々算出し、算出された相関を表す値に基づいて、一の第1道路区間を選択する。例えば最も相関を表す値が高い第1道路区間を選択する。そして、推定手段は選択された一の第1道路区間及び第2道路区間に係る相関に基づいて、交通状況を推定する。
従って、相関を表す値が高い第1及び第2道路区間に係る相関に基づいて第2道路区間の交通状況を推定できるため、より正確に交通状況を推定することができる。
【0019】
第4発明にあっては、算出手段は、推定手段と異なる方法で、第2道路区間の交通状況を算出する。つまり、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における第2道路区間の交通状況に基づいて、他の時間帯における第2道路区間の交通状況を統計的に算出する。誤差算出手段は、第2道路区間で計測された検証用の交通状況に対して、算出手段が算出した交通状況が有する誤差を算出する。また、誤差算出手段は、検証用の交通状況に対して、推定手段が推定した交通状況が有する誤差を算出する。そして、各誤差を比較し、より誤差が小さい手法で算出された交通状況を選択する。
従って、交通事情に応じて、より信頼性が高い手法を選択して、第2道路区間の交通状況を推定又は算出することができる。
例えば、交通事情の偶発的な変化が無い場合、統計的に算出した交通状況の方が、相関にて推定した交通状況よりも正確である場合があり、このような場合、統計的な手法を選択する。逆に、交通事情の偶発的な変化が激しい場合、相関にて推定した交通状況の方がより正確であり、このような場合、推定による手法を選択する。
【0020】
第5発明にあっては、算出手段は、推定手段と異なる方法で、第2道路区間の交通状況を算出する。つまり、自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における第2道路区間の交通状況に基づいて、他の時間帯における第2道路区間の交通状況を統計的に算出する。平均値算出手段は、算出手段が算出した交通状況及び前記推定手段が推定した交通状況に重み係数を乗算して、交通状況の加重平均値を算出する。誤差算出手段は、第2道路区間で計測された検証用の交通状況に対して、平均値算出手段が算出した加重平均値が有する誤差を特定する。そして、算出された誤差に基づいて、重み係数を特定する。例えば、誤差が最小になる重み係数を特定する。以後、前記平均値算出手段は、特定された重み係数にて交通状況の加重平均値を算出する。
従って、交通事情の偶発的な変化の度合いを重み係数にて評価し、統計的な手法及び推定による手法を組み合わせて、第2道路区間のより正確な交通状況を算出することができる。
【発明の効果】
【0021】
本発明によれば、交通状況計測装置が設置されていない第2道路区間の交通状況を、偶発的な交通事情の変化を考慮して、より正確に推定することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明をその実施の形態を示す図面に基づいて詳述する。
(実施の形態1)
図1は、本発明の実施の形態1に係る交通状況推定システムの構成を示すブロック図である。本発明の実施の形態1に係る交通状況推定システムは、交通情報センターに設置された交通状況推定装置1と、交通状況を計測するために道路に設置された交通状況計測装置2と、自動車に搭載された車載装置3とを備えている。
【0023】
図2は、交通状況計測装置2の設置例を示す模式図である。道路は、交通状況計測装置2が設置された複数のVICS提供道路区間Aと、交通状況計測装置2が設置されていない複数のVICS非提供道路区間Bとに区分される。二重線部分はVICS提供道路区間Aを示しており、所定の矩形地図領域、いわゆるメッシュには、例えば7つのVICS提供道路区間A1,A2,A3,A4,A5,A6,A7が含まれている。実線部分及び破線部分はVICS非提供道路区間Bを示しており、所定の矩形地図領域には、例えば8つのVICS非提供道路区間B1,B2,B3,B4,B5,B6,B7,B8が含まれている。特に実線部分は、走行している自動車の車載機器によって、現時刻の交通状況を計測できるVICS非提供道路区間B5,B6,B7,B8であり、破線部分は、現時刻に自動車が走行しておらず、交通状況を計測できないVICS非提供道路区間B1,B2,B3,B4を示している。なお、VICS提供道路区間A及びVICS非提供道路区間Bは、一又は連続する複数のリンクを示している。リンクは、一般には隣り合う2つの交差点間の区間である。
【0024】
交通状況計測装置2は、例えば車両感知器であり、一定周期ごとに道路に超音波を発射して、超音波の反射時間を計測している。交通状況計測装置2の感知領域内を自動車が走行している場合、自動車が走行していない場合に比べて反射時間が短くなるため、反射時間を計測することで、自動車を検知することができる。交通状況計測装置2は、検出結果に係る出力信号を交通状況推定装置1へ出力する。
【0025】
車載装置3は、図1に示すようにGPS32と、算出部33と、地図データを記憶した地図データベース31と、自動車の走行位置を示す座標位置情報、走行している時刻を示す時刻情報を記憶するメモリ34と、無線通信装置35とを備えており、定期的に座標位置情報及び時刻情報を含む送信信号を送信するように構成されている。
【0026】
GPS32は、衛星から送信された信号を受信するGPS受信機、時計部等を備えており、受信した信号及び地図データベース31の地図データに基づいて、自動車の走行位置を算出部33に算出させ、算出させた走行位置を示す座標位置情報及び時刻情報をメモリ34に記憶させる。
無線通信装置35は、例えばGPS32システムに有線又は無線接続された携帯電話であり、自動車の座標位置情報、時刻情報及び自動車識別コード等を交通状況推定装置1へ送信する。自動車識別コードはGPS32が記憶している。
【0027】
交通状況推定装置1は、解析部10、第1情報収集部11、第2情報収集部12、第1記憶装置11a及び第2記憶装置12aを備えている。
【0028】
第1情報収集部11には、入力インタフェース13を介して複数の交通状況計測装置2が接続されており、入力インタフェース13は交通状況計測装置2から出力された出力信号を第1情報収集部11に与える。
第1情報収集部11は、交通状況計測装置2の出力信号に基づいて、自動車の速度、旅行時間等の交通状況(以下、VICS交通状況と言う)を計測し、VICS交通状況を示すVICS情報、該自動車が走行している道路区間を示す区間識別情報、及び時刻情報を第1記憶装置11aに記憶させる。また、第1情報収集部11は、解析部10からの要求に応じて第1記憶装置11aからVICS情報等を読み出して、解析部10に与える。
【0029】
第2情報収集部12には、通信部14が接続されており、通信部14は自動車に搭載された無線通信装置35から送信された送信信号を受信し、受信した送信信号を第2情報収集部12に与える。
第2情報収集部12は、通信部14が受信した送信信号に基づいて、自動車の速度、旅行時間等の交通状況(以下、プローブ交通状況と言う)を計測し、プローブ交通状況を示すプローブ情報、該自動車が走行している道路区間を示す区間識別情報、及び時刻情報を第2記憶装置12aに記憶させる。また、第2情報収集部12は、解析部10からの要求に応じて第2記憶装置12aからプローブ情報等を読み出して、解析部10に与える。
【0030】
図3は、解析部10の構成を示すブロック図である。解析部10は、例えばマイクロコンピュータであり、CPU10aを備えている。CPU10aには、バス10kを介して、ROM10b、RAM10c、記憶装置10d、タイマー10e、通信インタフェース10f、補助記憶装置10g、第1入力部10j、第2入力部10h及び出力部10i等が接続されている。
【0031】
ROM10bは、不揮発性の半導体メモリであり、CPU10aが所定の処理を実行するために必要なコンピュータプログラムを記憶している。
【0032】
記憶装置10dは、例えばハードディスクであり、CPU10aが第1情報収集部11及び第2情報収集部12からVICS情報及びプローブ情報を読み出し、読み出した各情報に基づいて、VICS交通状況及びプローブ交通状況の相関を算出し、VICS非提道路区間の交通状況を推定する処理を実行するためのコンピュータプログラムを記憶している。
また、記憶装置10dは、推定基準対応テーブルを記憶している。推定基準対応テーブルは、各VICS非提供道路区間Bと、該VICS非提供道路区間Bの交通状況を推定するための推定基準となるVICS提供道路区間Aとを対応付けたテーブルである。
【0033】
CPU10aは、ROM10b及び記憶装置10dが記憶しているコンピュータプログラムを、一時記憶用のRAM10cに展開して実行することにより、交通状況を推定する処理を実行する。
【0034】
補助記憶装置10gは、CD−ROMドライブ、DVD(Digital Versatile Disc)ドライブ、MO(magnet Optical disk)ドライブ、BD(Blu-ray)ドライブ、HD−DVD(High Definition-DVD)ドライブ等であり、前記コンピュータプログラムを記憶している記録媒体から、該コンピュータプログラムを読み出して、記憶装置10dに記憶させる。記録媒体は、CD−ROM、DVD、BD、HD−DVD等である。
【0035】
通信インタフェース10fは、通信ネットワークN、例えばインターネットに接続するためのインタフェースである。CPU10aは、通信インタフェース10f及び通信ネットワークNを介して、外部コンピュータPCから前記コンピュータプログラムを取得し、取得したコンピュータプログラムを記憶装置10dに記憶させることができる。
【0036】
第1入力部10j及び第2入力部10hには、夫々第1情報収集部11及び第2情報収集部12が接続されている。CPU10aは、前記コンピュータプログラムを実行することにより、第1入力部10j及び第2入力部10hを介して、VICS情報、プローブ情報等を取得するように構成されている。
【0037】
出力部10iは、解析部10が推定した交通状況、各種情報、例えば渋滞情報、リンク旅行時間、区間旅行時間等を出力インタフェース15を介して外部へ出力する。例えば、各種情報を電波ビーコン、光ビーコン、FM多重放送局へ出力する。
【0038】
図4は、交通状況の推定に係る解析部10の処理手順を示すフローチャートである。
解析部10は、推定対象である一のVICS非提供道路区間Bを選択する(ステップS11)。例えばVICS非提供道路区間B1を選択する。
【0039】
そして、解析部10は、推定基準対応テーブルを読み出し(ステップS12)、推定基準対応テーブルに基づいてステップS11で選択した一のVICS非提供道路区間Bの推定基準となるVICS提供道路区間Aを特定する(ステップS13)。例えば、推定基準対応テーブルにおいてVICS非提供道路区間B1と、VICS提供道路区間A1とが対応づけられていた場合、VICS提供道路区間A1が特定される。
【0040】
次いで、解析部10は、前記一の時間帯のVICS非提供道路区間Bのプローブ情報を第2記憶装置12aから複数読み出す(ステップS14)。より具体的には、ステップS11で選択した一のVICS非提供道路区間Bを識別する区間識別情報及び一の時間帯を指定する情報を第2情報収集部12に与え、各情報に対応するプローブ情報を読み出す。
【0041】
そして、解析部10は、第1情報収集部11に制御信号を与え、一の時間帯におけるVICS提供道路区間AのVICS情報を第1記憶装置11aから複数読み出す(ステップS15)。より具体的には、ステップS13で特定したVICS提供道路区間Aを識別する区間識別情報、及び一の時間帯を指定する情報を第1情報収集部11に与え、各情報に対応するVICS情報を読み出す。時間帯は、例えば所定時刻と他の所定時刻との間の時刻、所定の曜日、月等を示している。
【0042】
次いで、解析部10は、読み出したVICS情報及びプローブ情報に基づいて、VICS交通状況及びプローブ交通状況の相関を算出する(ステップS16)。相関は、例えば一次式を用い、最尤推定法にて算出する。なお、十分な量のサンプル及び解析部10の処理能力がある場合、高次の線形式、非線形式を用いて相関を算出するように構成しても良い。また、時間帯、昼夜、曜日、月、天候等の要素毎に相関を算出するようにしても良い。また、これらの要素を変数とする関数を算出するように構成しても良い。
【0043】
図5は、プローブ交通状況及びVICS交通状況の一例であるプローブ旅行時間及びVICS旅行時間の相関を示す相関図である。横軸はプローブ旅行時間を示しており、縦軸はVICS旅行時間を示している。黒丸のプロットは、複数の時刻におけるプローブ旅行時間及びVICS旅行時間を示している。
【0044】
次いで、解析部10は、他の時間帯における前記一のVICS提供道路区間AのVICS情報を読み出し(ステップS17)、前記他の時間帯のVICS交通状況と、ステップS16で算出した相関とに基づいて、前記他の時間帯におけるVICS非提供道路区間Bの交通状況(以下、推定交通状況と言う)を算出し(ステップS18)、交通状況の推定に係る処理を終える。
【0045】
図6は、VICS交通状況及び推定交通状況を示すグラフである。横軸は時刻、縦軸は交通状況を示している。実線は、前記他の時間帯のVICS交通状況を示しており、破線は該VICS交通状況及び相関にて算出された推定交通状況を示している。また、四角のプロットは、前記他の時間帯で、VICS非提供道路区間Bにて計測された検証用のプローブ交通状況を示している。
【0046】
解析部10は、プローブ情報が得られていない時間帯におけるVICS非提供道路区間Bの交通状況を、該時間帯におけるVICS提供道路区間の交通状況に基づいて推定しているため、図6に示すようにVICS交通状況が大きく変動したとしても、VICS交通状況の変動を考慮して、VICS非提供道路区間の交通状況を推定することができる。
【0047】
次に、VICS推定基準対応テーブルの作成方法を説明する。解析部10は、はじめに交通状況計測装置2が正常に稼働しているVICS提供道路区間Aを特定し、特定されたVICS提供道路区間Aの中から、各VICS非提供道路区間Bの交通状況の推定に適した一のVICS道路区間を夫々対応付けた推定基準対応テーブルを作成する。以下、処理内容を具体的に説明する。
【0048】
図7は、VICS正常稼動区間リストの作成に係る解析部10の処理手順を示すフローチャートである。
まず解析部10は、一のVICS提供道路区間Aを選択する(ステップS31)。複数のVICS提供道路区間Aの情報は、記憶装置10dが記憶している。
【0049】
そして、解析部10は、一の時間帯における同一のVICS提供道路区間Aのプローブ情報を第2記憶装置12aから読み出し(ステップS32)、前記一の時間帯におけるVICS提供道路区間AのVICS情報を第1記憶装置11aから読み出す(ステップS33)。
【0050】
次いで、解析部10は、読み出したVICS情報及びプローブ情報に基づいて、VICS交通状況及びプローブ交通状況の相関係数を算出する(ステップS34)。
【0051】
次いで、解析部10は、相関係数が所定値以上であるか否かを判定する(ステップS35)。所定値は、例えば0.8である。所定値以上であると判定した場合(ステップS35:YES)、相関係数が所定値以上のVICS交通状況を、VICS正常稼働区間リストに格納する(ステップS36)。VICS正常稼働区間リストは、記憶装置10dにて記憶されている。
【0052】
ステップS36の処理を終えた場合、又は相関係数が所定値未満であると判定した場合(ステップS35:NO)、解析部10は、相関係数未判定の他のVICS提供道路区間Aがあるか否かを判定する(ステップS37)。他のVICS提供道路区間Aがあると判定した場合(ステップS37:YES)、解析部10は、処理をステップS31に戻して、相関係数未判定のVICS提供道路区間Aについても同様の処理を実行する。他のVICS提供道路区間Aがないと判定した場合(ステップS37:NO)、解析部10は、VICS正常稼働区間リストの作成に係る処理を終える。
図7の処理によって、交通状況計測装置2が正常に稼働しているVICS提供道路区間Aを特定することができ、交通状況の推定に不適なVICS提供道路区間Aを排除することができる。
【0053】
図8及び図9は、推定基準対応テーブルの作成に係るサブルーチンを示すフローチャートである。
解析部10は、一のVICS非提供道路区間Bを選択し(ステップS51)、一の時間帯におけるVICS非提供道路区間Bのプローブ情報を第2記憶装置12aから読み出す(ステップS52)。
【0054】
次いで、解析部10は、VICS正常稼働区間リストを読み出し(ステップS53)、変数である最大相関係数Kに0を設定する(ステップS54)。次いで、解析部10は、前記一の時間帯における、正常稼働している一のVICS提供道路区間AのVICS情報を第1記憶装置11aから読み出す(ステップS55)。
【0055】
そして、解析部10は、読み出したプローブ情報及びVICS情報に基づいて、プローブ交通状況及びVICS交通状況の相関係数を算出する(ステップS56)。
【0056】
次いで、解析部10は、ステップS56で算出された相関係数が最大相関係数Kより大きいか否かを判定する(ステップS57)。相関係数が最大相関係数Kより大きいと判定した場合(ステップS57:YES)、解析部10は、最大相関係数Kに、ステップS56で算出した相関係数を代入する(ステップS58)。
【0057】
ステップS58の処理を終えた場合、又は相関係数が最大相関係数K以下であると判定した場合(ステップS57:NO)、解析部10は、推定基準となり得る他のVICS提供道路区間Aがあるか否かを判定する(ステップS59)。他のVICS提供道路区間Aがあると判定した場合(ステップS59:YES)、解析部10は、処理をステップS55へ戻す。
【0058】
他のVICS提供道路区間Aがないと判定した場合(ステップS59:NO)、解析部10は、最大相関係数Kを有するVICS非提供道路区間B及びVICS提供道路区間Aの対応関係を推定基準対応テーブルに記憶させる(ステップS60)。
【0059】
次いで、解析部10は、他のVICS非提供道路区間Bがあるか否かを判定する(ステップS61)。他のVICS非提供道路区間Bがあると判定した場合(ステップS61:YES)、解析部10は、処理をステップS51に戻す。他のVICS非提供道路区間Bがないと判定した場合(ステップS61:NO)、解析部10は、推定基準対応テーブルの作成に係る処理を終える。
【0060】
図10は、2つのVICS提供道路区間Aと、VICS非提供道路区間Bとの相関関係を示すグラフである。横軸は時刻であり、縦軸は交通状況を示している。実線及び破線が2つのVICS提供道路区間AのVICS交通状況を示しており、四角のプロットはVICS非提供道路区間Bにおけるプローブ交通状況を示している。この場合、破線のVICS交通状況の方が、実線の交通状況より相関が高いため、破線で示すVICS提供道路区間Aが推定基準対応テーブルに記憶される。つまり、図8及び図9の処理によって、VICS非提供道路区間Bの交通状況の推定に最適なVICS提供道路区間Aを特定することができる。
【0061】
このように構成された交通状況推定方法、交通状況推定システム、交通状況推定装置1、コンピュータプログラムにあっては、交通状況計測装置2が設置されていないVICS非提供道路区間Bの交通状況を、偶発的な交通事情の変化を考慮して、正確に推定することができる。
【0062】
また、連続的に計測されるVICS提供道路区間Aの交通状況に基づいて、VICS非提供道路区間Bの交通状況を推定するため、安定して、該交通状況を推定することができる。
【0063】
更に、正常に稼働している交通状況計測装置2を用いて、VICS非提供道路区間Bの交通状況をより正確に推定することができる。
【0064】
更にまた、推定対象のVICS非提供道路区間Bと相関が高いVICS提供道路区間Aを選択して、VICS非提供道路区間Bの交通状況をより正確に推定することができる。
【0065】
図11は、推定基準となるVICS提供道路区間Aの選択に係る変形例を説明するための説明図である。実施の形態1にあっては、メッシュの矩形地図領域内で推定基準となるVICS提供道路区間Aを選択するように構成してあるが、図11(a)に示すように、メッシュより面積が小さい一点鎖線で示すエリア内で推定基準となるVICS提供道路区間Aを選択するように構成しても良い。
【0066】
また、図11(b)に示すように、VICS非提供道路区間B10,B11,B12に対して、併走するVICS提供道路区間A10を推定基準となるVICS提供道路区間Aとして選択するようにしても良い。
【0067】
また、実施の形態1では、交通状況計測装置の一例として車載感知器を説明したが、自動車の交通状況を計測できる装置であれば、他の計測装置、例えば電波ビーコン、光ビーコンを使用しても良い。
【0068】
更に、無線通信装置の一例として、携帯電話を説明したが、自動車の走行に関する情報を無線で送信できる装置であれば、他の装置であっても良い。また、必ずしも自動車に搭載されている必要はなく、自動車と伴に移動するように該自動車に配せば良い。
【0069】
更にまた、自動車に搭載されたGPSにて、自動車の座標位置情報を取得するように構成してあるが、携帯電話に搭載されたGPSにて同様の情報を取得し、交通状況推定装置1へ送信するように構成しても良い。
【0070】
更にまた、推定基準対応テーブルを図7及び図8の処理にて自動で作成するように構成してあるが、交通状況推定装置の使用者が推定基準対応テーブルを作成して、解析部の記憶装置に記憶させるようにしても良い。
更にまた、実施の形態1では、VICS提供道路区間のVICS交通状況に基づいて、VICS非提供道路区間の交通状況を推定する場合を説明したが、逆にVICS非提供道路区間のプローブ交通状況及び相関に基づいて、交通状況計測装置が故障しているVICS提供道路区間の交通状況を推定しても良い。
更にまた、実施の形態に係る交通状況推定装置は、第1情報収集部及び第1記憶装置を備えているが、各部を外部装置として構成し、外部の第1情報収集部で求まったVICS情報を取得するように構成しても良い。同様に、第2情報収集部及び第2記憶装置を備えているが、各部を外部装置として構成し、外部の第2情報収集部で求まったプローブ情報を取得するように構成しても良い。
更にまた、VICS交通状況とプローブ交通状況との相関を示す値として、相関係数を採用したが、該相関を表すことができる値であれば、他の値であっても良い。
【0071】
(実施の形態2)
実施の形態2に係る交通状況推定システムは、実施の形態1に係る交通状況推定システムと同様の構成を有しており、実施の形態1に係る推定方法と、従来方法とを比較し、より適当な方法を選択するように構成されている。処理内容のみが異なるため、以下では主に上記相違点について説明する。
【0072】
図12は、交通状況の推定に係る解析部10の処理手順を示すフローチャートである。まず、解析部10は、本発明の実施の形態1に係る推定交通状況の算出に係るサブルーチンを呼び出して、一のVICS非提供道路区間Bにおける所定検証時刻の推定交通状況を算出する(ステップS71)。推定交通状況の算出は、図4に示す処理手順にて行われる。
【0073】
そして、解析部10は、VICS非提供道路区間Bのプローブ交通状況に基づいて、統計的に所定検証時刻の交通状況(以下、統計交通状況と言う)を算出する(ステップS72)。例えば、交通上状況の平均値、中央値、最頻値等を算出する。
【0074】
次いで、解析部10は、検証用のプローブ情報、即ち一のVICS非提供道路区間Bにおける所定検証時刻のプローブ情報を第2記憶装置12aから読み出す(ステップS73)。
【0075】
次いで、解析部10は、検証用のプローブ交通状況に対する推定交通状況の誤差を算出し(ステップS74)、検証用のプローブ交通状況に対する統計交通状況の誤差を算出する(ステップS75)。
【0076】
次いで、解析部10は、推定交通状況の誤差が統計交通状況の誤差以上であるか否かを判定する(ステップS76)。推定交通状況の誤差が統計交通状況の誤差以上であると判定した場合(ステップS76:YES)、解析部10は、本発明に係る推定交通状況の算出に係るサブルーチンを呼び出して、他の時間帯における推定交通状況を算出する(ステップS77)。推定交通状況の誤差が統計交通状況の誤差以上でないと判定した場合(ステップS76:NO)、解析部10は、従来の統計的方法にて、他の時間帯における統計交通状況を算出する(ステップS78)。つまり、より信頼性が高い手法を用いて、VICS非提供道路区間Bの交通状況を推定する。
【0077】
実施の形態2に係る交通状況推定方法、交通状況推定システム、交通状況推定装置1、コンピュータプログラムにあっては、実施の形態1に係る手法と、従来の統計的手法とを比較し、より信頼性が高い手法を選択して、VICS非提供道路区間Bの交通状況を推定するように構成しているため、実施の形態1に比して、VICS非提供道路区間Bの交通状況をより正確に算出することができる。
【0078】
なお、実施の形態2にあっては、実施の形態1に係る推定方法と異なる方法として、統計的手法を説明したが、前記推定方法と異なる手法であれば、他の方法であっても良い。交通状況推定装置の使用者が用意した交通情報の推定結果を記憶装置に記憶させ、該交通情報を使用するように構成しても良い。
【0079】
実施の形態2に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの他の構成、作用及び効果は実施の形態1に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの構成、作用及び効果と同様であるため、対応する箇所には同様の符号を付して詳細な説明を省略する。
【0080】
(実施の形態3)
実施の形態3に係る交通状況推定システムは、実施の形態1に係る交通状況推定システムと同様の構成を有しており、実施の形態1に係る推定方法と、従来方法とを組み合わせて、VICS非提供道路区間Bの交通状況を算出するように構成されている。処理内容のみが異なるため、以下では主に上記相違点について説明する。
【0081】
図13は、交通状況の推定に係る解析部10の処理手順を示すフローチャートである。まず、解析部10は、本発明の実施の形態1に係る推定交通状況の算出に係るサブルーチンを呼び出して、一のVICS非提供道路区間Bにおける所定検証時刻の推定交通状況を算出する(ステップS91)。
【0082】
そして、解析部10は、VICS非提供道路区間Bのプローブ交通状況に基づいて、統計的に統計交通状況を算出する(ステップS92)。
【0083】
次いで、解析部10は、検証用のプローブ情報、即ち一のVICS非提供道路区間Bにおける所定検証時刻のプローブ情報を第2記憶装置12aから読み出す(ステップS93)。
【0084】
次いで、解析部10は、推定交通状況及び統計交通状況に重み係数γを乗算して、交通状況の加重平均値を算出する(ステップS94)。例えば、加重平均値は、加重平均値をAvとした場合、Av=統計交通状況×(1−γ)+推定交通状況×γの式で表される。
【0085】
次いで、解析部10は、検証用のプローブ交通状況に対する加重平均値の誤差が最小になるγを特定する(ステップS95)。具体的には、Σ(Av−Sn)=(Av−S1)+(Av−S2)+・・・+(Av−Sn)が極小になるγを最尤推定法等で特定する。なお、Snはn個の検証用のプローブ交通状況S1,S2,・・・,Snを示している。
【0086】
そして、特定した重み係数γで、他の時間帯における交通状況の加重平均値を算出する(ステップS96)。
【0087】
図14は、重み係数γを乗算して得た交通状況の加重平均値、推定交通状況及び統計交通状況を示すグラフである。横軸は時刻であり、縦軸は交通状況を示している。太線は、従来の統計的手法にて算出した統計交通状況であり、破線は本発明の実施の形態1に係る方法で算出した推定交通状況である。そして、細線及び二点鎖線は、夫々重み係数γ=0.5及び0.7にて算出した交通状況の加重平均値を示している。
【0088】
実施の形態3に係る交通状況推定方法、交通状況推定システム、交通状況推定装置1、コンピュータプログラムにあっては、交通事情の偶発的な変化の度合いを重み係数γにて評価し、実施の形態1に係る推定による手法と、従来の統計的な手法とを組み合わせて、VICS非提供道路区間Bの交通状況をより正確に算出することができる。
なお、実施の形態1にあっては、加算平均を算出するように構成してあるが、重み付けをして、各方法を組み合わせることができれば、相乗平均等、他の方法で交通状況を算出するように構成しても良い。
【0089】
実施の形態3に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの他の構成、作用及び効果は実施の形態1に係る交通状況推定システム、交通状況計測方法、交通状況計測装置、コンピュータプログラムの構成、作用及び効果と同様であるため、対応する箇所には同様の符号を付して詳細な説明を省略する。
また、今回開示された実施の形態1乃至3は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0090】
【図1】本発明の実施の形態1に係る交通状況推定システムの構成を示すブロック図である。
【図2】交通状況計測装置の設置例を示す模式図である。
【図3】解析部の構成を示すブロック図である。
【図4】交通状況の推定に係る解析部の処理手順を示すフローチャートである。
【図5】プローブ交通状況及びVICS交通状況の一例であるプローブ旅行時間及びVICS旅行時間の相関を示す相関図である。
【図6】VICS交通状況及び推定交通状況を示すグラフである。
【図7】VICS正常稼動区間リストの作成に係る解析部の処理手順を示すフローチャートである。
【図8】推定基準対応テーブルの作成に係るサブルーチンを示すフローチャートである。
【図9】推定基準対応テーブルの作成に係るサブルーチンを示すフローチャートである。
【図10】2つのVICS提供道路区間と、VICS非提供道路区間との相関関係を示すグラフである。
【図11】推定基準となるVICS提供道路区間の選択に係る変形例を説明するための説明図である。
【図12】交通状況の推定に係る解析部の処理手順を示すフローチャートである。
【図13】交通状況の推定に係る解析部の処理手順を示すフローチャートである。
【図14】重み係数γを乗算して得た交通状況の加重平均値、推定交通状況及び統計交通状況を示すグラフである。
【符号の説明】
【0091】
1 交通状況推定装置
2 交通状況計測装置
3 車載装置
4 記憶媒体
10 解析部(相関算出手段,推定手段)
10d 記憶装置
11 第1情報収集部
11a 第1記憶装置
12 第2情報収集部
12a 第2記憶装置
13 入力インタフェース
14 通信部
15 出力インタフェース
31 地図データベース
32 GPS
33 算出部
34 メモリ
35 無線通信装置(送信装置)
A VICS提供道路区間(第1道路区間)
B VICS非提供道路区間(第2道路区間)
【特許請求の範囲】
【請求項1】
道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定装置において、
第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する第1取得手段と、
自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する第2取得手段と、
前記第1取得手段及び前記第2取得手段が取得した一の時間帯における各交通状況の相関を算出する相関算出手段と、
該相関算出手段が算出した相関、及び前記第1取得手段(又は前記第2取得手段)が取得した他の時間帯における交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定する推定手段と
を備えることを特徴とする交通状況推定装置。
【請求項2】
前記送信信号に基づいて計測された前記第1道路区間の交通状況を取得する第3取得手段と、
該第3取得手段が取得した交通状況及び前記第1取得手段が取得した交通状況の相関を表す値を算出する手段と、
算出された相関を表す値が所定値以上であるか否かを判定する判定手段と
を備え、
前記相関算出手段は、
前記判定手段が所定値以上であると判定した場合、前記第1道路区間及び前記第2道路区間の交通状況の相関を算出するようにしてある
ことを特徴とする請求項1に記載の交通状況推定装置。
【請求項3】
前記第1取得手段は、
複数の前記第1道路区間の交通状況を取得するようにしてあり、
前記複数の第1道路区間の交通状況及び前記第2取得手段が取得した交通状況の相関を表す値を夫々算出する手段と、
算出された相関を表す値に基づいて、一の第1道路区間を選択する手段と
を備え、
前記推定手段は、
選択された一の第1道路区間及び前記第2道路区間に係る相関に基づいて交通状況を推定するようにしてある
ことを特徴とする請求項1又は請求項2に記載の交通状況推定装置。
【請求項4】
自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、
前記第2道路区間の取得された交通状況に対して、前記算出手段が算出した交通状況が有する誤差、及び前記推定手段が推定した交通状況が有する誤差を算出する誤差算出手段と、
該誤差算出手段が算出した各誤差を比較する手段と、
比較結果に基づいて、誤差が小さい交通状況を選択する手段と
を備えることを特徴とする請求項1乃至請求項3のいずれか一つに記載の交通状況推定装置。
【請求項5】
自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、
該算出手段が算出した交通状況及び前記推定手段が推定した交通状況に重み係数を乗算して、交通状況の加重平均値を算出する平均値算出手段と、
前記第2道路区間の取得された交通状況に対して、平均値算出手段が算出した加重平均値が有する誤差を算出する誤差算出手段と
該誤差算出手段が算出した誤差に基づいて、重み係数を特定する特定手段と
を備え、
前記平均値算出手段は、
特定した重み係数にて交通状況の加重平均値を算出するようにしてある
ことを特徴とする請求項1乃至請求項3のいずれか一つに記載の交通状況推定装置。
【請求項6】
道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定方法において、
第1道路区間に設置された交通状況計測装置の出力信号、及び自動車に配された送信装置から送信された送信信号に基づいて計測された前記第1道路区間及び交通状況計測装置が設置されていない第2道路区間の交通状況を取得し、
取得された一の時間帯における前記第1道路区間及び前記第2道路区間の各交通状況の相関を算出し、
算出した相関、及び取得された他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定する
ことを特徴とする交通状況推定方法。
【請求項7】
コンピュータに、自動車の走行可能な第1道路区間及び第2道路区間の一の時間帯における交通状況に基づいて、他の時間帯における第1道路区間又は第2道路区間の交通状況を推定させるコンピュータプログラムであって、
コンピュータに、一の時間帯における前記第1及び第2道路区間の各交通状況の相関を算出させるステップと、
コンピュータに、算出した相関、及び他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定させるステップと
を備えることを特徴とするコンピュータプログラム。
【請求項1】
道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定装置において、
第1道路区間に設置された交通状況計測装置の出力信号に基づいて計測された該第1道路区間の交通状況を取得する第1取得手段と、
自動車に配された送信装置から送信された送信信号に基づいて計測された、交通状況計測装置が設置されていない第2道路区間の交通状況を取得する第2取得手段と、
前記第1取得手段及び前記第2取得手段が取得した一の時間帯における各交通状況の相関を算出する相関算出手段と、
該相関算出手段が算出した相関、及び前記第1取得手段(又は前記第2取得手段)が取得した他の時間帯における交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定する推定手段と
を備えることを特徴とする交通状況推定装置。
【請求項2】
前記送信信号に基づいて計測された前記第1道路区間の交通状況を取得する第3取得手段と、
該第3取得手段が取得した交通状況及び前記第1取得手段が取得した交通状況の相関を表す値を算出する手段と、
算出された相関を表す値が所定値以上であるか否かを判定する判定手段と
を備え、
前記相関算出手段は、
前記判定手段が所定値以上であると判定した場合、前記第1道路区間及び前記第2道路区間の交通状況の相関を算出するようにしてある
ことを特徴とする請求項1に記載の交通状況推定装置。
【請求項3】
前記第1取得手段は、
複数の前記第1道路区間の交通状況を取得するようにしてあり、
前記複数の第1道路区間の交通状況及び前記第2取得手段が取得した交通状況の相関を表す値を夫々算出する手段と、
算出された相関を表す値に基づいて、一の第1道路区間を選択する手段と
を備え、
前記推定手段は、
選択された一の第1道路区間及び前記第2道路区間に係る相関に基づいて交通状況を推定するようにしてある
ことを特徴とする請求項1又は請求項2に記載の交通状況推定装置。
【請求項4】
自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、
前記第2道路区間の取得された交通状況に対して、前記算出手段が算出した交通状況が有する誤差、及び前記推定手段が推定した交通状況が有する誤差を算出する誤差算出手段と、
該誤差算出手段が算出した各誤差を比較する手段と、
比較結果に基づいて、誤差が小さい交通状況を選択する手段と
を備えることを特徴とする請求項1乃至請求項3のいずれか一つに記載の交通状況推定装置。
【請求項5】
自動車に配された送信装置から送信された送信信号に基づいて計測された一の時間帯における前記第2道路区間の交通状況に基づいて、前記他の時間帯における前記第2道路区間の交通状況を算出する算出手段と、
該算出手段が算出した交通状況及び前記推定手段が推定した交通状況に重み係数を乗算して、交通状況の加重平均値を算出する平均値算出手段と、
前記第2道路区間の取得された交通状況に対して、平均値算出手段が算出した加重平均値が有する誤差を算出する誤差算出手段と
該誤差算出手段が算出した誤差に基づいて、重み係数を特定する特定手段と
を備え、
前記平均値算出手段は、
特定した重み係数にて交通状況の加重平均値を算出するようにしてある
ことを特徴とする請求項1乃至請求項3のいずれか一つに記載の交通状況推定装置。
【請求項6】
道路を自動車の走行可能な複数の道路区間に区分して、該道路区間の交通状況を推定する交通状況推定方法において、
第1道路区間に設置された交通状況計測装置の出力信号、及び自動車に配された送信装置から送信された送信信号に基づいて計測された前記第1道路区間及び交通状況計測装置が設置されていない第2道路区間の交通状況を取得し、
取得された一の時間帯における前記第1道路区間及び前記第2道路区間の各交通状況の相関を算出し、
算出した相関、及び取得された他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定する
ことを特徴とする交通状況推定方法。
【請求項7】
コンピュータに、自動車の走行可能な第1道路区間及び第2道路区間の一の時間帯における交通状況に基づいて、他の時間帯における第1道路区間又は第2道路区間の交通状況を推定させるコンピュータプログラムであって、
コンピュータに、一の時間帯における前記第1及び第2道路区間の各交通状況の相関を算出させるステップと、
コンピュータに、算出した相関、及び他の時間帯における前記第1道路区間(又は前記第2道路区間)の交通状況に基づいて、前記他の時間帯における前記第2道路区間(又は前記第1道路区間)の交通状況を推定させるステップと
を備えることを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2008−146167(P2008−146167A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2006−329760(P2006−329760)
【出願日】平成18年12月6日(2006.12.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成18年12月6日(2006.12.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]