
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動水栓や小便器用の自動洗浄装置などに適用される人体検知センサに関する。
【背景技術】
【0002】
従来より、使用者の手かざし操作を検出して自動的に吐水する自動水栓や、近づいて来た使用者を検出したときに自動的に洗浄水を供給する小便器用の自動洗浄装置などに適用される人体検知センサが知られている。このような人体検知センサとしては、LED等の発光素子と、PSD(Position Sensitive Detector:光位置センサ)等の受光素子と、がオフセットして配置されたセンサが知られている(例えば、特許文献1参照。)。
【0003】
このような人体検知センサは、被検知対象からの反射光がPSDに入射した位置を特定し、いわゆる三角測量の原理により被検知対象までの距離を判断している。PSDは、入射光の重心位置に応じた信号を出力する非常にシンプルな受光素子であり、低消費電力であるという利点がある。
【0004】
しかしながら、前記従来の人体検知センサでは、次のような問題がある。すなわち、PSDで取得できる情報量は位置情報のみであり、外乱光が入射したときに採り得る対処方法が少ないという実情がある。それ故、例えば、PSDを含む人体検知センサが洗面台の自動水栓に適用されたような場合、洗面ボウルの鉢面による鏡面反射光や、ノイズ的な外乱光等の影響で誤検知が生じることがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−336715号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、前記従来の問題点に鑑みてなされたものであり、誤検知を抑制して検知性能を高めた人体検知センサ、及び自動水栓を提供しようとするものである。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、1次元あるいは2次元的に画素が配列された撮像素子を含む撮像部と、該撮像部に対して所定方向にオフセットして配設された発光部を備え、発光部が投射する光に応じて生じた反射光を撮像部で受光して被検知対象を検知する人体検知センサであって、
前記反射光を受光した各画素の受光量に基づいて、前記撮像素子における各画素の配列領域である受光エリア内の前記反射光の重心位置を特定する重心特定手段と、
前記受光エリアの一部に設定された検知エリアに前記重心位置が属しているか否かを判定する第1の判定手段と、
各画素の受光量に所定の空間フィルタ処理を施して得られたフィルタ処理データのうちの前記重心位置に当たる重心画素のデータ値に関する閾値処理の結果、及び前記重心画素の受光量の度合いに関する閾値処理の結果、のうちの少なくともいずれか一方に応じて前記重心画素の受光度合いの適否を判定する第2の判定手段と、
前記第1及び第2の判定手段がいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段と、を備えた人体検知センサにある。
【0008】
本発明の第2の態様は、底部に排水口を設けた鉢の内部に吐水する水栓と、
前記第1の態様の人体検知センサと、
該人体検知センサの検知信号に応じて、前記水栓の吐止水の切替、あるいは吐水量の調整を実行する給水制御手段と、を備え、
前記人体検知センサが備える撮像部の撮像範囲には、前記鉢の内周面が含まれている自動水栓にある。
【0009】
本発明の第1の態様の人体検知センサは、2種類の判定手段を備えている。第1の判定手段は、前記検知エリアに前記重心位置が属しているか否かという従来の人体検知センサと似通った判定を行う手段である。第2の判定手段は、前記重心画素の受光度合いの適否を判定する手段である。前記人体検知センサは、前記第1及び第2の判定手段がいずれも肯定的な判定を行ったときに前記検知信号を出力する。
【0010】
例えば、洗面台の自動水栓に人体検知センサが適用された場合には、洗面ボウルの鉢面による鏡面反射光が前記撮像素子に入射するおそれがある。特に、本発明の第2の態様の自動水栓では、前記撮像素子によって撮像される撮像範囲の少なくとも一部に前記鉢面が包含されている。そのため、前記撮像範囲に手の平や手の甲などの被検知対象が存在していないとき、前記鉢面による鏡面反射光が遮られずに前記撮像素子に入射する可能性が高い。鏡面反射光が入射しても、その重心位置が前記検知エリア外にある場合であれば、PSDを利用した従来の人体検知センサであっても非検知と判断可能である。
【0011】
上記のような鏡面反射光が入射している状態で、さらにノイズ的な外乱光や電気的なノイズ等が発生して前記検知エリア内の各画素にノイズ的な受光量が生じる場合がある。このような場合、受光量の多い領域が前記検知エリアの内外で1箇所ずつ形成されることになる。このとき、前記検知エリア内外の受光量が多い2箇所の領域の中間的な位置、すなわち受光量分布の山と山との間の中間的な位置に前記重心位置がずれて位置する可能性がある。従来の人体検知センサでは、このような重心位置の位置ずれを看破できないので、その重心位置が前記検知エリア内であればそのまま誤検知が発生する可能性が高い。
【0012】
これに対して、本発明の人体検知センサでは、前記第1の判定手段による重心位置の位置的な判定に加えて、前記重心画素の受光度合いの適否が前記第2の判定手段により判定される。この第2の判定手段によれば、各画素の受光量分布の中で前記重心位置が適切に位置しているか否かを判定可能である。この人体検知センサによれば、上記のような重心位置のずれを判別でき、誤検知を未然に回避できる。
【0013】
以上のように、本発明の人体検知センサは、鏡面反射光やノイズ的な外乱光等の影響を抑制してロバストな検知性能を実現した優れた特性の人体検知センサである。この人体検知センサを備えた本発明の自動水栓では、誤作動が少ない良好な動作信頼性が実現されている。
【0014】
本発明における重心特定手段が特定する重心位置は、数学的に厳密に計算される重心位置であっても良いが、必要とされる位置精度を確保しつつ簡易的に計算できる重心位置であっても良い。さらに、受光量が最大となる画素の位置や、周辺画素の受光量の総和が最大となる位置等を前記重心位置として代用できる可能性もある。
【0015】
また、前記第2の判定手段では、前記重心画素の受光量が所定値以上であったこと、が肯定的な判定のための条件として設定されていることが好ましい。
この場合には、例えば、前記検知エリア外にピークを持つ鏡面反射光と、前記検知エリア内で生じたノイズ成分と、の組合せに応じて、前記重心位置が前記検知エリア内にずれて位置したような状況に適切に対処可能になる。前記第1の判定手段が肯定的な判定を行ったとしても、前記重心画素の受光量が十分でなければ前記第2の判定手段による否定的な判定が可能となり、誤検知を回避できる。
【0016】
また、前記第2の判定手段では、周辺画素の受光量の総和の度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値が所定値以上であったこと、が肯定的な判定のための条件として設定されていることも良い。
この場合には、前記重心画素の周辺に位置する画素を含めて受光量が十分であるか否かを判定でき、前記第2の判定手段による判定精度を向上できる。
【0017】
また、前記第2の判定手段では、前記所定方向における各画素の受光量の位置的な変化度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値、及び前記重心画素近傍の所定範囲に属する他の画素のデータ値がいずれも所定値以内であったこと、が肯定的な判定のための条件として設定されていることが好ましい。
【0018】
手などの人体の表面は、鏡面とは異なり凸凹の多い表面性状を有しているので、拡散反射が生じることが多い。拡散反射光による各画素の受光量分布は、正規分布に近いなだらかな分布形状を呈する場合が多い。このような受光量分布のピーク周辺では、受光量の位置的な変化度合いが小さい範囲が比較的広い範囲に渡って形成される。
【0019】
一方、洗面ボウルの鉢面や、タイルなどの壁面などの人工物には、鏡面反射を生じさせる表面性状を有する物が多く存在している。その鏡面反射光による各画素の受光量分布は、上記の拡散反射光とは異なりシャープな尖った形状を呈する場合が多い。このような受光量分布では、ピーク近傍においても受光量の位置的な変化度合いが大きくなる傾向にある。また、ノイズ的な外乱光が入射したときの受光量分布は、ノイズ的なギザギザした分布形状を呈する場合が多い。当然ながら、このような受光量分布では、受光量の位置的な変化度合いが大きくなる傾向にある。
【0020】
上記のごとく各画素の受光量の位置的な変化度合いを求める前記空間フィルタ処理を施せば、鏡面反射光やノイズ的な外乱光による上記のような受光量分布の特徴が強調されたフィルタ処理データを生成できる。鏡面反射光やノイズ的な外乱光が入射したときのフィルタ処理データでは、重心画素の周辺において大きなデータ値を呈する画素が含まれる可能性が高くなる。一方、上記のようになだらかな受光量分布を呈する拡散反射光が入射したときのフィルタ処理データでは、上記のごとく正規分布に近い受光量分布のピーク周辺において大きなデータ値を呈する画素が含まれる可能性が低くなっている。
【0021】
各画素の受光量の位置的な変化度合いが強調されたフィルタ処理データについて、重心画素のデータ値、及び近傍の他の画素のデータ値がいずれも所定値以内であったことを判定条件として設定すれば、鏡面反射光やノイズ的な外乱光等を確実性高く排除できるようになる。
なお、さらに好ましくは、受光量の位置的な変化度合いが強調されたフィルタ処理データに関する上記の判定条件に対して、前記重心画素の受光量が所定値以上であることや、前記重心画素の周辺画素の受光量の総和の度合いが所定値以上であること等の判定条件を組み合わせることが良い。
【0022】
また、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達する直前の第1の画素、及び前記総受光量の半分に達したときの第2の画素を特定した上で、
前記第1の画素の位置から前記第2の画素の位置までの位置的な範囲に含まれる何れかの位置を前記重心位置として特定するのが良い。
【0023】
また、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達する直前の第1の画素、及び前記総受光量の半分に達したときの第2の画素を特定した上で、
前記総受光量の半分から前記第1の画素における積算受光量を差し引いた受光量を前記第2の画素の受光量により除算して求められる偏差の分だけ、前記第1の画素の位置を基準として前記第2の画素側へずらした位置を前記重心位置として特定することも良い。
【0024】
この場合には、前記撮像素子における隣り合う画素の間隔よりも細かいサブピクセル(副画素)の精度で前記重心位置を特定可能である。前記撮像素子の画素単位ではなくサブピクセルの精度で重心位置を算出できれば、要求される前記重心位置の精度に対して、相対的に、前記撮像素子に必要な画素数を抑制できる。前記撮像素子として画素数が少ない素子を採用できれば、前記撮像素子の消費電力を抑制できると共に、低コストの撮像素子を採用できるようになり製品コストを低減できる。
【0025】
また、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達したときの画素の位置を前記重心位置として特定することも良い。
【0026】
一般に、反射光の重心位置を厳密に算出しようとすると、各画素の受光量と(重心位置からの)距離との乗算演算等が必要になり、計算処理の負担が過大となるおそれがある。一方、上記のような簡易的な計算方法によれば、算出する重心位置の位置精度を確保しつつ計算負荷を著しく低減できる。
【図面の簡単な説明】
【0027】
【図1】実施例1における、自動水栓を備えた洗面台を示す斜視断面図。
【図2】実施例1における、センサユニットの断面構造を示す断面図(図1中のA−A線矢視断面図)。
【図3】実施例1における、ラインセンサを示す斜視図。
【図4】実施例1における、人体検知センサのシステム構成を示すブロック図。
【図5】実施例1における、差分データの生成手順を示す説明図。
【図6】実施例1における、重心位置の計算方法を説明する説明図。
【図7】実施例1における、人体検知センサの検知原理を説明する説明図。
【図8】実施例1における、非検知と判断される光の入射パターンを例示する説明図。
【図9】実施例1における、非検知と判断される光の入射パターンを例示する説明図。
【図10】実施例2における、空間フィルタ処理を説明する説明図。
【図11】実施例3における、空間フィルタ処理に適用するオペレータを示す説明図。
【図12】実施例3における、検知と判断される光の入射パターンを例示する説明図。
【図13】実施例3における、非検知と判断される光の入射パターンを例示する説明図。
【図14】実施例4における、積算受光量の分布を示すグラフ。
【図15】実施例4における、重心位置の特定方法を説明する説明図。
【発明を実施するための形態】
【0028】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例1)
本例は、洗面台15の水栓(自動水栓)16に人体検知センサ1を適用した例である。この内容について、図1〜図9を参照して説明する。
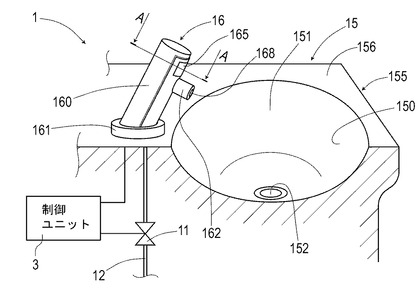
本例の洗面台15は、図1のごとく、凹状に窪むボウル部151を設けたカウンタ155と、吐水口168を設けた水栓16と、を備えている。水栓16は、カウンタ155の上面をなすカウンタトップ156に立設されている。ボウル部151は、その最深部に排水口152を備えている。
【0029】
水栓16は、カウンタトップ156に対する台座をなす基部161と、基部161から延設された略円柱状の胴部160と、を有している。胴部160は、ボウル部151側に向けて傾けた状態で基部161に支持されている。ボウル部151側に当たる胴部160の側面には、先端に吐水口168が開口する略円筒形の吐水部162が取り付けられている。この吐水部162の上側に当たる胴部160の側面には、人体検知センサ1の検知面を形成するフィルタ板165が配設されている。フィルタ板165は、赤外領域の光を選択的に透過する樹脂製フィルタである。
【0030】
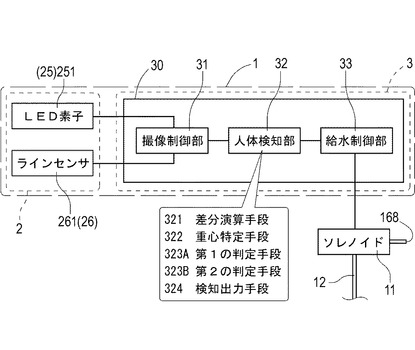
本例の人体検知センサ1は、図1及び図2のごとく、水栓16に組み込まれたセンサユニット2と、センサユニット2を制御する制御ユニット3と、により構成されている。洗面台15では、この人体検知センサ1と、給水配管12に設けられた吐水弁(電磁弁)であるソレノイド11と、の組合せにより自動給水装置が形成されている。
【0031】
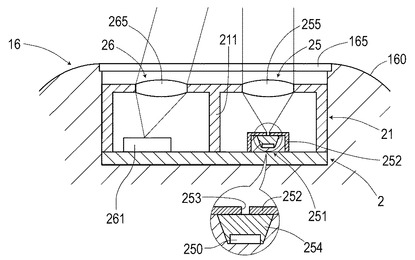
センサユニット2は、図1及び図2のごとく、LED素子251及びラインセンサ261を筐体21に収容したユニットであり、制御ユニット3から電力供給を受けて動作する。センサユニット2では、水栓16のフィルタ板165を見込むように発光部25及び撮像部26が配設されている。赤外光を発光する発光部25は、LED素子251と投光レンズ255とにより構成されている。撮像部26は、ラインセンサ(撮像素子)261と集光レンズ265とにより構成されている。発光部25と撮像部26とは、遮光性を備えた隔壁211を挟んで水平方向に所定のオフセット量ずらして配置されている。
【0032】
LED素子251は、図2のごとく、パッケージ基板のキャビティに実装されたLEDチップ250を透明樹脂254により封止した発光素子である。発光部25では、縦方向のスリット孔253を設けた遮光性の素子ケース252によってLED素子251が覆われている。この発光部25によれば、拡がり角が抑制されたシャープな光を被検知対象に向けて投射可能である。
【0033】
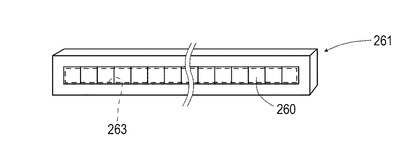
ラインセンサ261は、図1〜図3のごとく、受光量を電気的な物理量に変換する画素260が直線的に配列された1次元の撮像センサである。ラインセンサ261は、有効画素として64個の画素260を備えている。ラインセンサ261では、これら64個の画素260により受光エリア263が形成されている。本例では、ボウル部151の鉢面150を見込むようにラインセンサ261が配設されている。ラインセンサ261の見込み方向に手などの遮蔽物がない状態であれば、その撮像範囲に鉢面150が包含されることになる。
【0034】
ラインセンサ261は、受光動作を実行する毎に撮像データを出力する。本例の撮像データは、受光量の度合いを表す256階調の画素値が各画素260の並び順に配列された1次元のデジタルデータである。なお、本例のラインセンサ261は、図示しない電子シャッターを備えている。電子シャッターを用いて露光時間を調整すれば、各画素260の受光量の飽和を未然に回避可能である。
【0035】
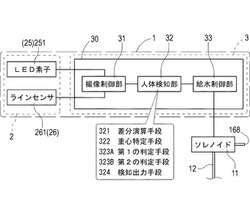
制御ユニット3は、図1及び図4のごとく、センサユニット2及びソレノイド11を制御するユニットであり、商用電源から電力の供給を受けて動作する。この制御ユニット3は、センサユニット2、ソレノイド11等を制御する制御基板30を備えている。制御基板30には、ラインセンサ261とLED素子251を制御する撮像制御部31と、検知処理を実行する人体検知部32と、人体検知部32の検知結果に応じてソレノイド11を制御する給水制御部33と、が設けられている。
【0036】
撮像制御部31は、動作期間と非動作期間が交互に現れる間欠動作が行われるようにラインセンサ261を制御すると共に、動作期間においてLED素子251を発光させる。本例では、時間的に隣り合う動作期間の間隙の非動作期間として、0.3〜0.5秒のインターバル時間が設定されている。撮像制御部31は、前回の動作期間が終了してからインターバル時間が経過するまでの間、ラインセンサ261への電源供給を停止して非動作期間を設定し、インターバル時間が経過したときに電源供給を再開して動作期間を設定する。
【0037】
撮像制御部31は、1回の動作期間において、2回の受光動作が実行されるようにラインセンサ261を制御する。1回目の受光動作は、LED素子251の発光を伴わずに実行される。2回目の受光動作は、LED素子251の発光を伴って実行される。撮像制御部31は、受動動作毎に撮像データが出力されるようにラインセンサ261を制御する。
【0038】
人体検知部32は、図4のごとく、(a)差分演算手段321、(b)重心特定手段322、(c)第1の判定手段323A、(d)第2の判定手段323B、(e)検知出力手段324としての機能を備えている。以下、人体検知部32が備える各手段の内容について説明する。
【0039】
(a)差分演算手段321
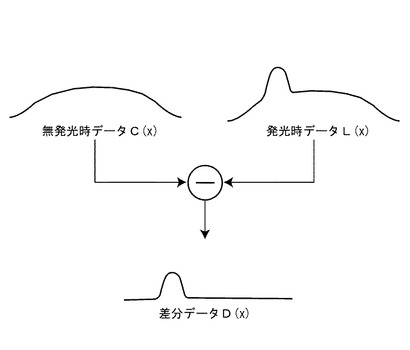
差分演算手段321は、図5のごとく、LED素子251の発光がない1回目の受光動作による撮像データである無発光時データC(x)と、LED光(LED素子251の投射光)の下での2回目の受光動作による発光時データL(x)と、を取り込んで記憶した後、両者の差分データD(x)を求める手段である。ここで、xは、0〜63の画素番号を示し、L(n)等は、画素番号nの画素の画素値を表している。周囲光に加えてLED光有りの発光時データL(x)から、周囲光のみの無発光時データC(x)を、差し引いた差分データD(x)では、周囲光の影響が抑圧され、LED光に応じた反射光の成分が精度高く抽出されている。
【0040】
(b)重心特定手段322
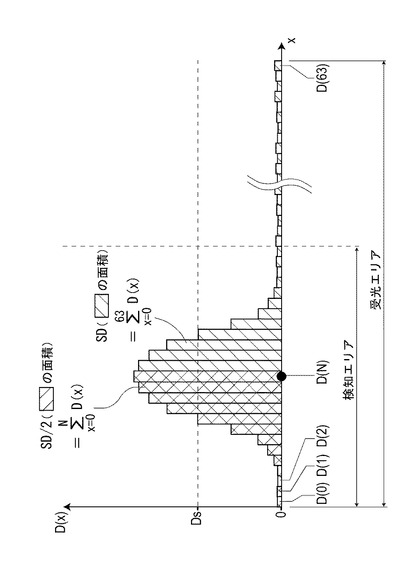
重心特定手段322は、図5のごとく得られた差分データD(x)について、重心位置を計算する手段である。ここで、本例では、計算負荷の軽減のため、簡易的な計算方法により重心位置を算出している。この計算方法について、横軸に画素番号x、縦軸に画素値(受光量)D(x)が規定された図6を参照して説明する。
【0041】
本例の計算方法では、まず、差分データD(x)を積算し、64画素の画素値の総和SDを求めている。この総和SDは、図6中の右上がりの斜線ハッチングで示す領域の面積に相当している。重心位置は、受光エリア263の左端の画素番号ゼロの画素から順番に各画素260の画素値を積算していき、その積算値がSD/2に達したときの画素番号Nの画素(黒丸で図示)の位置として計算される。ここで、積算値SD/2は、右下がりの斜線ハッチングで示す領域の面積に相当している。この領域は、前記総和SDの領域に包含されており、同図において、クロスハッチの領域として把握される。
【0042】
(c)第1の判定手段323A
第1の判定手段323Aは、上記のように特定された重心位置が検知エリア(図6参照。)に属しているか否かを判定する手段である。本例では、センサユニット2による三角測量の原理を根拠として次に説明するように検知エリアが設定されている。
【0043】
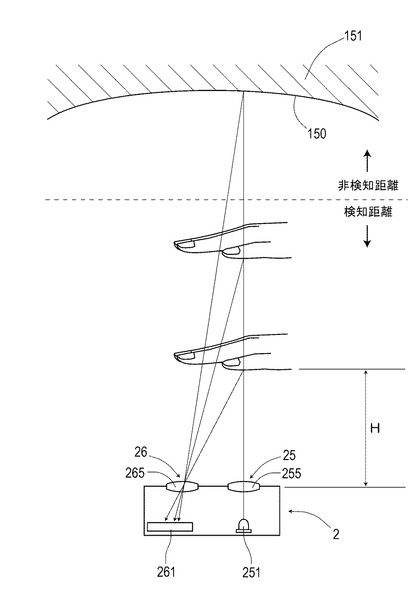
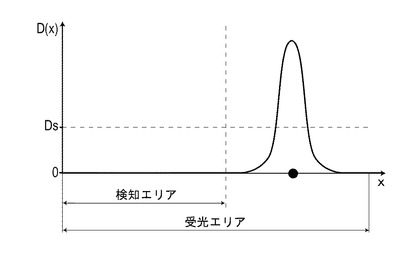
本例の洗面台15におけるセンサユニット2、ボウル部151の鉢面150、使用者の手の位置関係は、図7のごとく模式的に表現できる。LED光のうち被検知対象である手による反射光が受光エリア263に入射する際、被検知対象までの距離Hに応じてその入射位置が異なってくる。距離Hが短いほど、ラインセンサ261に対する入射位置が同図中、左側となり、距離Hが長くなるほど右側に位置することになる。受光エリア263における反射光の入射位置に基づけば、被検知対象の距離を計測することも可能である。第1の判定手段323Aの判定基準となる検知エリアは、検知対象となる検知距離(図7参照。)に対応するように受光エリア263内に設定されたエリアである。第1の判定手段323Aは、図6のごとく、重心位置が検知エリア内に含まれているときに肯定的な判定を行う。
【0044】
(d)第2の判定手段323B
第2の判定手段323Bは、差分データD(x)のうち、重心位置に当たる重心画素の画素値D(N)(図6参照。)についての閾値処理の結果に応じて判定を実行する手段である。第2の判定手段323Bは、重心画素の画素値D(N)がDs以上であったときに肯定的な判定を行う。
【0045】
(e)検知出力手段324
検知出力手段324は、第1及び第2の判定手段323A・Bの判定が何れも肯定的であったときに、被検知対象である手などが検知された旨を表す検知信号を出力する。図6のごとく、重心画素が検知エリア内に位置し、かつ、重心画素の画素値D(N)≧Dsであれば、検知信号が出力される。
【0046】
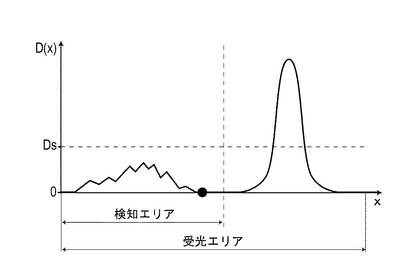
本例の人体検知センサ1は、重心位置が検知エリア内であるという第1の判定条件と、重心画素の画素値がDs以上という第2の判定条件と、が何れも肯定的にクリアされたときに検知信号を出力する。この人体検知センサ1によれば、例えば、図8のような鉢面150からの鏡面反射光や、図9のようなノイズ的な外乱光による誤検知を未然に抑制できる。図8の鏡面反射光の場合では、黒丸で示す重心位置が検知エリア外に位置することから非検知と判断可能である。図9のごとく、鏡面反射光に重畳してノイズ的な外乱光が入射したことで重心位置が検知エリア内にずれて位置した場合には、重心画素の画素値がDsに満たないことから非検知と判断可能である。
【0047】
以上のように本例の人体検知センサ1によれば、重心位置が適正であるか否か、及び重心画素の画素値が適正であるか否か、の判定結果の組み合わせに応じて、手かざし操作を精度高く検知可能である。人体検知センサ1では、重心位置の位置判定に対して重心画素の画素値に関する閾値判定が組み合わされ、これにより検知精度が向上されている。
【0048】
なお、本例では、簡易的な計算により重心位置を算出したが、計算処理能力に余裕があれば数学的に厳密に重心位置を算出しても良い。
また、本例では、重心画素の画素値D(N)に対する閾値Dsの値を具体的に例示していないが、ラインセンサ261の特性や周囲の明るさ等に応じて、適宜設定できる。
【0049】
なお、本例は、洗面台15に人体検知センサ1を適用した例であるが、キッチンの水栓であっても良い。さらに、自動洗浄機能付きの小用便器の自動給水装置のセンサとして、本例の人体検知センサ1を適用することも可能である。さらには、手かざし操作や人体に反応して点灯する照明や自動扉等、各種の自動装置に対して、この人体検知センサ1を適用することもできる。
なお、本例では、センサユニット2と制御ユニット3とを別体で構成している。これに代えて、センサユニット2と制御ユニット3とを一体的に構成し、水栓16に収容することも良い。
【0050】
なお、本例は、受光動作中の露光時間の長さを制御するために電子シャッターを採用している。電子シャッターは必須ではなく省略することもできるが、電子シャッターに代えて、ラインセンサ261に対する光の入射を物理的に遮断する機械式シャッターを採用しても良い。
なお、ラインセンサ261の各画素260に感度のばらつきがある場合等であれば、各画素260の受光量を補正してから検知処理を実行することも良い。
【0051】
(実施例2)
本例は、実施例1の人体検知センサに基づいて、第2の判定手段の構成を変更した例である。この内容について、図10を用いて説明する。
本例は、重心画素の画素値が適正か否かという実施例1の判定に代えて、重心画素の周辺を含めて画素値の総和が適正か否かの判定を実行する第2の判定手段の例である。
【0052】
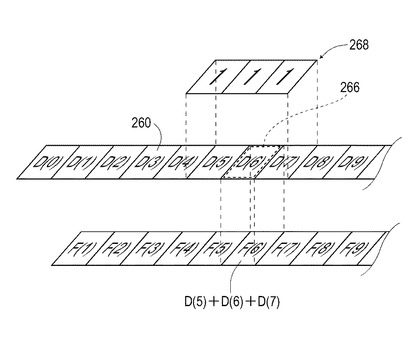
本例では、図10のごとく、重み係数が全て1である1×3画素サイズのオペレータ268を利用して、差分データD(x)(図5参照。)に空間フィルタ処理を施している。このオペレータ268は、演算対象画素266を中心とした1×3画素サイズの対象範囲に対して重ね合わせられたとき、各画素の画素値D(x)と対応する重み係数との乗算値を積算して演算対象画素266のデータ値F(x)を算出するオペレータである。例えば、画素番号6番の画素が演算対象画素であれば、フィルタ処理によるデータ値は、F(6)=D(5)+D(6)+D(7)となる。図10のオペレータ268は、ローパスフィルタのオペレータの一種であり、差分データD(x)を平滑化させるように作用する。
【0053】
このフィルタ処理データF(x)のうちの重心画素のデータ値(重心画素と1近傍画素の画素値D(x)の総和)が所定値以上であるか否かを判定すれば、第2の判定手段による判定の確実性を向上できる。例えば、検知と判定されるべき状況であるにも関わらず、ノイズ的な原因等によって重心画素の画素値が周囲よりも小さくなっている場合や、受光効率が悪い欠陥画素が重心画素に当たってしまった場合等であっても、肯定的な判定が可能になる。
【0054】
なお、その他の構成及び作用効果については、実施例1と同様である。
なお、本例に代えて、2近傍画素を含めた1×5画素サイズのオペレータ等、空間フィルタ処理に適用するオペレータのサイズについては適宜、変更可能である。オペレータ268としては、ローパスフィルタのオペレータであれば本例の作用効果を得ることができ、その重み係数については適宜、変更可能である。
また、本例では、フィルタ処理データF(x)に対する閾値を具体的に例示していないが、ラインセンサ261の特性や、周囲の明るさや、ノイズ的な外乱光の特性等に応じて、適宜設定できる。
【0055】
(実施例3)
本例は、実施例1の人体検知センサに基づいて、第2の判定手段の構成を変更した例である。この内容について、図11〜13を用いて説明する。
本例は、重心画素の画素値D(x)(図6参照。)が適正であるか否かという実施例1の判定に加えて、重心画素周辺の画素値D(x)の変化度合いが適正であるか否かの判定を実行する第2の判定手段の例である。
【0056】
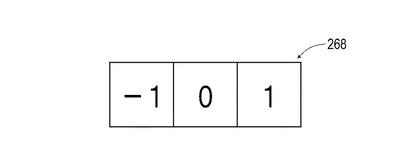
本例では、図11のごとく、重み係数が−1、0、1の1×3画素サイズのオペレータ268を利用して差分データD(x)に空間フィルタ処理を施している。例えば、図10の場合と同様、画素番号6番の画素が演算対象画素であれば、フィルタ処理後のそのデータ値はF(6)=D(7)−D(5)となる。図11のオペレータ268は、ハイパスフィルタのオペレータの一種であり、差分データD(x)の受光量分布を画素の並び方向に微分して位置的な変化度合いを強調できる。
【0057】
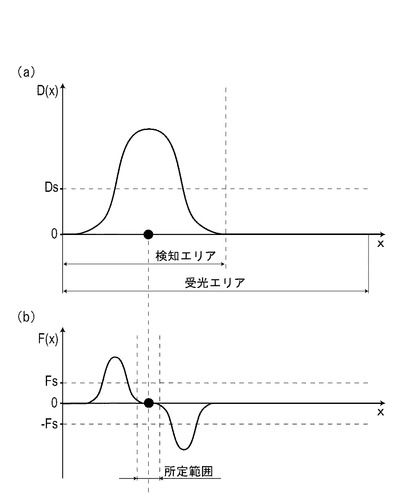
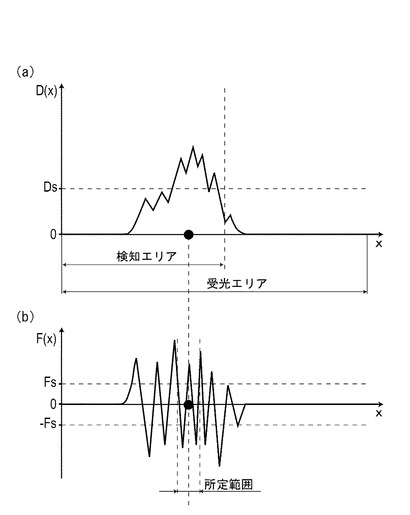
オペレータ268による空間フィルタ処理の例を図12及び図13に示す。図12は、手かざし操作による拡散反射光が入射したときの例である。図13は、ノイズ的な外乱光が検知エリアに入射したときの例である。これらの図では、空間フィルタ処理の対象となる差分データD(x)のグラフが上段に配置され、空間フィルタ処理後のフィルタ処理データF(x)のグラフが下段に配置されている。
【0058】
図12のごとく、手かざし操作による拡散反射光が入射した場合には、差分データD(x)の受光量分布が正規分布に近いなだらかな曲線形状となる。その受光量分布のピーク付近に位置する重心画素(黒丸で図示)、及びその周辺の画素では、フィルタ処理データF(x)のデータ値がゼロに近くなっている。
一方、ノイズ的な外乱光が入射したとき、図13のような差分データD(x)が得られる場合がある。ノイズ的な外乱光に基づく差分データD(x)の場合、その受光量分布に滑らかさがなくギザギザになる傾向がある。本例の空間フィルタ処理に適用するオペレータ268によれば、このような受光量分布のギザギザ度合いが強調されたフィルタ処理データF(x)を生成できる。
【0059】
本例の第2の判定手段では、前記フィルタ処理データF(x)のうち、重心画素を含む所定範囲(本例では、2近傍画素を含む5画素の範囲)に属する各画素のデータ値F(x)の絶対値がFsを超えないこと、という判定条件が追加されている。
図13の場合であれば、まず、差分データD(x)については、重心位置が検知エリアに含まれていると共に、重心画素の画素値が所定値Ds以上となっている。一方、フィルタ処理データF(x)については、所定範囲に属する画素の中にデータ値F(x)がFsを超える画素が含まれている。本例で追加されたデータ値F(x)に関する上記の判定条件に適合しないことから、図13のようなノイズ的な外乱光は検知の対象から排除される。
一方、図12のような手かざし操作による拡散反射光の場合であれば、本例で追加された判定条件によっても肯定的な判定が可能である。同図の拡散反射光については、本例の人体検知センサによって検知と判断可能である。
【0060】
なお、その他の構成及び作用効果については、実施例1と同様である。
なお、本例に代えて、2近傍画素を含めた1×5画素サイズや1×2画素サイズのオペレータ等、空間フィルタ処理に適用するオペレータのサイズについては適宜、変更可能である。オペレータ268としては、ハイパスフィルタのオペレータであれば本例の作用効果を得ることができ、その重み係数については適宜、変更可能である。
また、本例では、フィルタ処理データF(x)に対する閾値Fsの値を具体的に例示していないが、実施例2と同様、適宜設定できる。
【0061】
(実施例4)
本例は、実施例1の構成を基にして、重心位置をサブピクセル(副画素)精度で特定した例である。この内容について、実施例1で参照した図6、及び図14及び図15を参照して説明する。
図14は、図6における左端の画素番号ゼロの画素から特定の画素までの画素範囲に含まれる各画素の画素値(差分データD(x))の積算値の変化を示している。同図の横軸は前記特定の画素の画素番号xを示し、縦軸は積算値である積算受光量S(x)を示している。S(x)及び同図中のSDは、次式の通りである。特に、SDは、実施例1と同様、全画素の画素値(差分データD(x))の総和である。
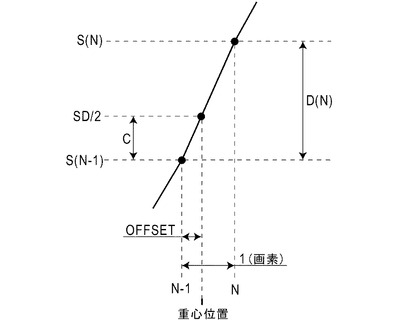
図15は、図14におけるS(x)=SD/2近傍の破線で囲まれた領域の拡大図である。
【0062】
【数1】

【数2】
【0063】
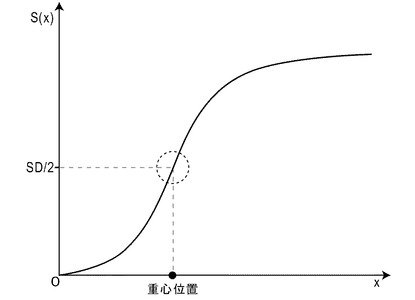
本例では、図14及び図15に示すごとく、S(x)=SD/2となる位置をサブピクセル精度で算出し、この位置を重心位置として特定している。
本例の重心位置の特定方法では、まず、画素番号が連続する2画素であって、画素番号が小さい方の第1の画素(N−1)の積算受光量S(N−1)がSDの1/2よりも小さく、かつ、画素番号が大きい方の第2の画素(N)の積算受光量S(N)がSD/2以上である2画素が特定される。
【0064】
ここで、第1の画素(N−1)と第2の画素(N)との間の1画素分の位置的な範囲において、積算受光量S(x)が図15に示すように直線的に変化していると仮定すれば、次の比例式が成り立つ。
【数3】
【0065】
この式を変形すると、OFFSET(偏差)を次式のように表すことができる。
【数4】
重心位置は、第1の画素(N−1)の位置を基準として、OFFSETの分だけ第2の画素(N)側へずらした位置として次式にように特定できる。
【数5】
【0066】
本例のように、重心位置をサブピクセル精度で特定できれば、距離的な分解能の向上に有効であり、重心位置が検知エリアに属しているか否かの判定精度を向上できるという効果が得られる。
このように重心位置をサブピクセルの精度で算出できれば、相対的に、撮像素子であるラインセンサにおいて必要となる画素数を抑制できる。画素数の少ないラインセンサであれば、低消費電力を期待できる。ラインセンサの消費電力を抑制できれば、例えば、水流発電機の発電電力を電力供給源とした自動水栓等への適用が比較的容易になる。
【0067】
なお、その他の構成及び作用効果については、実施例1と同様である。
本例では、第1の画素(N−1)と第2の画素(N)との間の1画素分の位置的な範囲においてS(x)が直線的に変化していると仮定して、重心位置をサブピクセル精度で求めている。これに代えて、前記1画素分の位置的な範囲内でS(x)が曲線的に変化していると仮定して重心位置を求めることも良い。
【0068】
以上、実施例1〜4のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【符号の説明】
【0069】
1…人体検知センサ、15…洗面台、16…水栓(自動水栓)、11…ソレノイド、12…給水配管、2…センサユニット、25…発光部、251…LED素子、26…撮像部、260…画素、261…ラインセンサ(撮像素子)、268…オペレータ、3…制御ユニット、30…制御基板、31…撮像制御部、32…人体検知部、321…差分演算手段、322…重心特定手段、323A…第1の判定手段、323B…第2の判定手段、324…検知出力手段、33…給水制御部
【技術分野】
【0001】
本発明は、自動水栓や小便器用の自動洗浄装置などに適用される人体検知センサに関する。
【背景技術】
【0002】
従来より、使用者の手かざし操作を検出して自動的に吐水する自動水栓や、近づいて来た使用者を検出したときに自動的に洗浄水を供給する小便器用の自動洗浄装置などに適用される人体検知センサが知られている。このような人体検知センサとしては、LED等の発光素子と、PSD(Position Sensitive Detector:光位置センサ)等の受光素子と、がオフセットして配置されたセンサが知られている(例えば、特許文献1参照。)。
【0003】
このような人体検知センサは、被検知対象からの反射光がPSDに入射した位置を特定し、いわゆる三角測量の原理により被検知対象までの距離を判断している。PSDは、入射光の重心位置に応じた信号を出力する非常にシンプルな受光素子であり、低消費電力であるという利点がある。
【0004】
しかしながら、前記従来の人体検知センサでは、次のような問題がある。すなわち、PSDで取得できる情報量は位置情報のみであり、外乱光が入射したときに採り得る対処方法が少ないという実情がある。それ故、例えば、PSDを含む人体検知センサが洗面台の自動水栓に適用されたような場合、洗面ボウルの鉢面による鏡面反射光や、ノイズ的な外乱光等の影響で誤検知が生じることがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−336715号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、前記従来の問題点に鑑みてなされたものであり、誤検知を抑制して検知性能を高めた人体検知センサ、及び自動水栓を提供しようとするものである。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、1次元あるいは2次元的に画素が配列された撮像素子を含む撮像部と、該撮像部に対して所定方向にオフセットして配設された発光部を備え、発光部が投射する光に応じて生じた反射光を撮像部で受光して被検知対象を検知する人体検知センサであって、
前記反射光を受光した各画素の受光量に基づいて、前記撮像素子における各画素の配列領域である受光エリア内の前記反射光の重心位置を特定する重心特定手段と、
前記受光エリアの一部に設定された検知エリアに前記重心位置が属しているか否かを判定する第1の判定手段と、
各画素の受光量に所定の空間フィルタ処理を施して得られたフィルタ処理データのうちの前記重心位置に当たる重心画素のデータ値に関する閾値処理の結果、及び前記重心画素の受光量の度合いに関する閾値処理の結果、のうちの少なくともいずれか一方に応じて前記重心画素の受光度合いの適否を判定する第2の判定手段と、
前記第1及び第2の判定手段がいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段と、を備えた人体検知センサにある。
【0008】
本発明の第2の態様は、底部に排水口を設けた鉢の内部に吐水する水栓と、
前記第1の態様の人体検知センサと、
該人体検知センサの検知信号に応じて、前記水栓の吐止水の切替、あるいは吐水量の調整を実行する給水制御手段と、を備え、
前記人体検知センサが備える撮像部の撮像範囲には、前記鉢の内周面が含まれている自動水栓にある。
【0009】
本発明の第1の態様の人体検知センサは、2種類の判定手段を備えている。第1の判定手段は、前記検知エリアに前記重心位置が属しているか否かという従来の人体検知センサと似通った判定を行う手段である。第2の判定手段は、前記重心画素の受光度合いの適否を判定する手段である。前記人体検知センサは、前記第1及び第2の判定手段がいずれも肯定的な判定を行ったときに前記検知信号を出力する。
【0010】
例えば、洗面台の自動水栓に人体検知センサが適用された場合には、洗面ボウルの鉢面による鏡面反射光が前記撮像素子に入射するおそれがある。特に、本発明の第2の態様の自動水栓では、前記撮像素子によって撮像される撮像範囲の少なくとも一部に前記鉢面が包含されている。そのため、前記撮像範囲に手の平や手の甲などの被検知対象が存在していないとき、前記鉢面による鏡面反射光が遮られずに前記撮像素子に入射する可能性が高い。鏡面反射光が入射しても、その重心位置が前記検知エリア外にある場合であれば、PSDを利用した従来の人体検知センサであっても非検知と判断可能である。
【0011】
上記のような鏡面反射光が入射している状態で、さらにノイズ的な外乱光や電気的なノイズ等が発生して前記検知エリア内の各画素にノイズ的な受光量が生じる場合がある。このような場合、受光量の多い領域が前記検知エリアの内外で1箇所ずつ形成されることになる。このとき、前記検知エリア内外の受光量が多い2箇所の領域の中間的な位置、すなわち受光量分布の山と山との間の中間的な位置に前記重心位置がずれて位置する可能性がある。従来の人体検知センサでは、このような重心位置の位置ずれを看破できないので、その重心位置が前記検知エリア内であればそのまま誤検知が発生する可能性が高い。
【0012】
これに対して、本発明の人体検知センサでは、前記第1の判定手段による重心位置の位置的な判定に加えて、前記重心画素の受光度合いの適否が前記第2の判定手段により判定される。この第2の判定手段によれば、各画素の受光量分布の中で前記重心位置が適切に位置しているか否かを判定可能である。この人体検知センサによれば、上記のような重心位置のずれを判別でき、誤検知を未然に回避できる。
【0013】
以上のように、本発明の人体検知センサは、鏡面反射光やノイズ的な外乱光等の影響を抑制してロバストな検知性能を実現した優れた特性の人体検知センサである。この人体検知センサを備えた本発明の自動水栓では、誤作動が少ない良好な動作信頼性が実現されている。
【0014】
本発明における重心特定手段が特定する重心位置は、数学的に厳密に計算される重心位置であっても良いが、必要とされる位置精度を確保しつつ簡易的に計算できる重心位置であっても良い。さらに、受光量が最大となる画素の位置や、周辺画素の受光量の総和が最大となる位置等を前記重心位置として代用できる可能性もある。
【0015】
また、前記第2の判定手段では、前記重心画素の受光量が所定値以上であったこと、が肯定的な判定のための条件として設定されていることが好ましい。
この場合には、例えば、前記検知エリア外にピークを持つ鏡面反射光と、前記検知エリア内で生じたノイズ成分と、の組合せに応じて、前記重心位置が前記検知エリア内にずれて位置したような状況に適切に対処可能になる。前記第1の判定手段が肯定的な判定を行ったとしても、前記重心画素の受光量が十分でなければ前記第2の判定手段による否定的な判定が可能となり、誤検知を回避できる。
【0016】
また、前記第2の判定手段では、周辺画素の受光量の総和の度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値が所定値以上であったこと、が肯定的な判定のための条件として設定されていることも良い。
この場合には、前記重心画素の周辺に位置する画素を含めて受光量が十分であるか否かを判定でき、前記第2の判定手段による判定精度を向上できる。
【0017】
また、前記第2の判定手段では、前記所定方向における各画素の受光量の位置的な変化度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値、及び前記重心画素近傍の所定範囲に属する他の画素のデータ値がいずれも所定値以内であったこと、が肯定的な判定のための条件として設定されていることが好ましい。
【0018】
手などの人体の表面は、鏡面とは異なり凸凹の多い表面性状を有しているので、拡散反射が生じることが多い。拡散反射光による各画素の受光量分布は、正規分布に近いなだらかな分布形状を呈する場合が多い。このような受光量分布のピーク周辺では、受光量の位置的な変化度合いが小さい範囲が比較的広い範囲に渡って形成される。
【0019】
一方、洗面ボウルの鉢面や、タイルなどの壁面などの人工物には、鏡面反射を生じさせる表面性状を有する物が多く存在している。その鏡面反射光による各画素の受光量分布は、上記の拡散反射光とは異なりシャープな尖った形状を呈する場合が多い。このような受光量分布では、ピーク近傍においても受光量の位置的な変化度合いが大きくなる傾向にある。また、ノイズ的な外乱光が入射したときの受光量分布は、ノイズ的なギザギザした分布形状を呈する場合が多い。当然ながら、このような受光量分布では、受光量の位置的な変化度合いが大きくなる傾向にある。
【0020】
上記のごとく各画素の受光量の位置的な変化度合いを求める前記空間フィルタ処理を施せば、鏡面反射光やノイズ的な外乱光による上記のような受光量分布の特徴が強調されたフィルタ処理データを生成できる。鏡面反射光やノイズ的な外乱光が入射したときのフィルタ処理データでは、重心画素の周辺において大きなデータ値を呈する画素が含まれる可能性が高くなる。一方、上記のようになだらかな受光量分布を呈する拡散反射光が入射したときのフィルタ処理データでは、上記のごとく正規分布に近い受光量分布のピーク周辺において大きなデータ値を呈する画素が含まれる可能性が低くなっている。
【0021】
各画素の受光量の位置的な変化度合いが強調されたフィルタ処理データについて、重心画素のデータ値、及び近傍の他の画素のデータ値がいずれも所定値以内であったことを判定条件として設定すれば、鏡面反射光やノイズ的な外乱光等を確実性高く排除できるようになる。
なお、さらに好ましくは、受光量の位置的な変化度合いが強調されたフィルタ処理データに関する上記の判定条件に対して、前記重心画素の受光量が所定値以上であることや、前記重心画素の周辺画素の受光量の総和の度合いが所定値以上であること等の判定条件を組み合わせることが良い。
【0022】
また、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達する直前の第1の画素、及び前記総受光量の半分に達したときの第2の画素を特定した上で、
前記第1の画素の位置から前記第2の画素の位置までの位置的な範囲に含まれる何れかの位置を前記重心位置として特定するのが良い。
【0023】
また、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達する直前の第1の画素、及び前記総受光量の半分に達したときの第2の画素を特定した上で、
前記総受光量の半分から前記第1の画素における積算受光量を差し引いた受光量を前記第2の画素の受光量により除算して求められる偏差の分だけ、前記第1の画素の位置を基準として前記第2の画素側へずらした位置を前記重心位置として特定することも良い。
【0024】
この場合には、前記撮像素子における隣り合う画素の間隔よりも細かいサブピクセル(副画素)の精度で前記重心位置を特定可能である。前記撮像素子の画素単位ではなくサブピクセルの精度で重心位置を算出できれば、要求される前記重心位置の精度に対して、相対的に、前記撮像素子に必要な画素数を抑制できる。前記撮像素子として画素数が少ない素子を採用できれば、前記撮像素子の消費電力を抑制できると共に、低コストの撮像素子を採用できるようになり製品コストを低減できる。
【0025】
また、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達したときの画素の位置を前記重心位置として特定することも良い。
【0026】
一般に、反射光の重心位置を厳密に算出しようとすると、各画素の受光量と(重心位置からの)距離との乗算演算等が必要になり、計算処理の負担が過大となるおそれがある。一方、上記のような簡易的な計算方法によれば、算出する重心位置の位置精度を確保しつつ計算負荷を著しく低減できる。
【図面の簡単な説明】
【0027】
【図1】実施例1における、自動水栓を備えた洗面台を示す斜視断面図。
【図2】実施例1における、センサユニットの断面構造を示す断面図(図1中のA−A線矢視断面図)。
【図3】実施例1における、ラインセンサを示す斜視図。
【図4】実施例1における、人体検知センサのシステム構成を示すブロック図。
【図5】実施例1における、差分データの生成手順を示す説明図。
【図6】実施例1における、重心位置の計算方法を説明する説明図。
【図7】実施例1における、人体検知センサの検知原理を説明する説明図。
【図8】実施例1における、非検知と判断される光の入射パターンを例示する説明図。
【図9】実施例1における、非検知と判断される光の入射パターンを例示する説明図。
【図10】実施例2における、空間フィルタ処理を説明する説明図。
【図11】実施例3における、空間フィルタ処理に適用するオペレータを示す説明図。
【図12】実施例3における、検知と判断される光の入射パターンを例示する説明図。
【図13】実施例3における、非検知と判断される光の入射パターンを例示する説明図。
【図14】実施例4における、積算受光量の分布を示すグラフ。
【図15】実施例4における、重心位置の特定方法を説明する説明図。
【発明を実施するための形態】
【0028】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例1)
本例は、洗面台15の水栓(自動水栓)16に人体検知センサ1を適用した例である。この内容について、図1〜図9を参照して説明する。
本例の洗面台15は、図1のごとく、凹状に窪むボウル部151を設けたカウンタ155と、吐水口168を設けた水栓16と、を備えている。水栓16は、カウンタ155の上面をなすカウンタトップ156に立設されている。ボウル部151は、その最深部に排水口152を備えている。
【0029】
水栓16は、カウンタトップ156に対する台座をなす基部161と、基部161から延設された略円柱状の胴部160と、を有している。胴部160は、ボウル部151側に向けて傾けた状態で基部161に支持されている。ボウル部151側に当たる胴部160の側面には、先端に吐水口168が開口する略円筒形の吐水部162が取り付けられている。この吐水部162の上側に当たる胴部160の側面には、人体検知センサ1の検知面を形成するフィルタ板165が配設されている。フィルタ板165は、赤外領域の光を選択的に透過する樹脂製フィルタである。
【0030】
本例の人体検知センサ1は、図1及び図2のごとく、水栓16に組み込まれたセンサユニット2と、センサユニット2を制御する制御ユニット3と、により構成されている。洗面台15では、この人体検知センサ1と、給水配管12に設けられた吐水弁(電磁弁)であるソレノイド11と、の組合せにより自動給水装置が形成されている。
【0031】
センサユニット2は、図1及び図2のごとく、LED素子251及びラインセンサ261を筐体21に収容したユニットであり、制御ユニット3から電力供給を受けて動作する。センサユニット2では、水栓16のフィルタ板165を見込むように発光部25及び撮像部26が配設されている。赤外光を発光する発光部25は、LED素子251と投光レンズ255とにより構成されている。撮像部26は、ラインセンサ(撮像素子)261と集光レンズ265とにより構成されている。発光部25と撮像部26とは、遮光性を備えた隔壁211を挟んで水平方向に所定のオフセット量ずらして配置されている。
【0032】
LED素子251は、図2のごとく、パッケージ基板のキャビティに実装されたLEDチップ250を透明樹脂254により封止した発光素子である。発光部25では、縦方向のスリット孔253を設けた遮光性の素子ケース252によってLED素子251が覆われている。この発光部25によれば、拡がり角が抑制されたシャープな光を被検知対象に向けて投射可能である。
【0033】
ラインセンサ261は、図1〜図3のごとく、受光量を電気的な物理量に変換する画素260が直線的に配列された1次元の撮像センサである。ラインセンサ261は、有効画素として64個の画素260を備えている。ラインセンサ261では、これら64個の画素260により受光エリア263が形成されている。本例では、ボウル部151の鉢面150を見込むようにラインセンサ261が配設されている。ラインセンサ261の見込み方向に手などの遮蔽物がない状態であれば、その撮像範囲に鉢面150が包含されることになる。
【0034】
ラインセンサ261は、受光動作を実行する毎に撮像データを出力する。本例の撮像データは、受光量の度合いを表す256階調の画素値が各画素260の並び順に配列された1次元のデジタルデータである。なお、本例のラインセンサ261は、図示しない電子シャッターを備えている。電子シャッターを用いて露光時間を調整すれば、各画素260の受光量の飽和を未然に回避可能である。
【0035】
制御ユニット3は、図1及び図4のごとく、センサユニット2及びソレノイド11を制御するユニットであり、商用電源から電力の供給を受けて動作する。この制御ユニット3は、センサユニット2、ソレノイド11等を制御する制御基板30を備えている。制御基板30には、ラインセンサ261とLED素子251を制御する撮像制御部31と、検知処理を実行する人体検知部32と、人体検知部32の検知結果に応じてソレノイド11を制御する給水制御部33と、が設けられている。
【0036】
撮像制御部31は、動作期間と非動作期間が交互に現れる間欠動作が行われるようにラインセンサ261を制御すると共に、動作期間においてLED素子251を発光させる。本例では、時間的に隣り合う動作期間の間隙の非動作期間として、0.3〜0.5秒のインターバル時間が設定されている。撮像制御部31は、前回の動作期間が終了してからインターバル時間が経過するまでの間、ラインセンサ261への電源供給を停止して非動作期間を設定し、インターバル時間が経過したときに電源供給を再開して動作期間を設定する。
【0037】
撮像制御部31は、1回の動作期間において、2回の受光動作が実行されるようにラインセンサ261を制御する。1回目の受光動作は、LED素子251の発光を伴わずに実行される。2回目の受光動作は、LED素子251の発光を伴って実行される。撮像制御部31は、受動動作毎に撮像データが出力されるようにラインセンサ261を制御する。
【0038】
人体検知部32は、図4のごとく、(a)差分演算手段321、(b)重心特定手段322、(c)第1の判定手段323A、(d)第2の判定手段323B、(e)検知出力手段324としての機能を備えている。以下、人体検知部32が備える各手段の内容について説明する。
【0039】
(a)差分演算手段321
差分演算手段321は、図5のごとく、LED素子251の発光がない1回目の受光動作による撮像データである無発光時データC(x)と、LED光(LED素子251の投射光)の下での2回目の受光動作による発光時データL(x)と、を取り込んで記憶した後、両者の差分データD(x)を求める手段である。ここで、xは、0〜63の画素番号を示し、L(n)等は、画素番号nの画素の画素値を表している。周囲光に加えてLED光有りの発光時データL(x)から、周囲光のみの無発光時データC(x)を、差し引いた差分データD(x)では、周囲光の影響が抑圧され、LED光に応じた反射光の成分が精度高く抽出されている。
【0040】
(b)重心特定手段322
重心特定手段322は、図5のごとく得られた差分データD(x)について、重心位置を計算する手段である。ここで、本例では、計算負荷の軽減のため、簡易的な計算方法により重心位置を算出している。この計算方法について、横軸に画素番号x、縦軸に画素値(受光量)D(x)が規定された図6を参照して説明する。
【0041】
本例の計算方法では、まず、差分データD(x)を積算し、64画素の画素値の総和SDを求めている。この総和SDは、図6中の右上がりの斜線ハッチングで示す領域の面積に相当している。重心位置は、受光エリア263の左端の画素番号ゼロの画素から順番に各画素260の画素値を積算していき、その積算値がSD/2に達したときの画素番号Nの画素(黒丸で図示)の位置として計算される。ここで、積算値SD/2は、右下がりの斜線ハッチングで示す領域の面積に相当している。この領域は、前記総和SDの領域に包含されており、同図において、クロスハッチの領域として把握される。
【0042】
(c)第1の判定手段323A
第1の判定手段323Aは、上記のように特定された重心位置が検知エリア(図6参照。)に属しているか否かを判定する手段である。本例では、センサユニット2による三角測量の原理を根拠として次に説明するように検知エリアが設定されている。
【0043】
本例の洗面台15におけるセンサユニット2、ボウル部151の鉢面150、使用者の手の位置関係は、図7のごとく模式的に表現できる。LED光のうち被検知対象である手による反射光が受光エリア263に入射する際、被検知対象までの距離Hに応じてその入射位置が異なってくる。距離Hが短いほど、ラインセンサ261に対する入射位置が同図中、左側となり、距離Hが長くなるほど右側に位置することになる。受光エリア263における反射光の入射位置に基づけば、被検知対象の距離を計測することも可能である。第1の判定手段323Aの判定基準となる検知エリアは、検知対象となる検知距離(図7参照。)に対応するように受光エリア263内に設定されたエリアである。第1の判定手段323Aは、図6のごとく、重心位置が検知エリア内に含まれているときに肯定的な判定を行う。
【0044】
(d)第2の判定手段323B
第2の判定手段323Bは、差分データD(x)のうち、重心位置に当たる重心画素の画素値D(N)(図6参照。)についての閾値処理の結果に応じて判定を実行する手段である。第2の判定手段323Bは、重心画素の画素値D(N)がDs以上であったときに肯定的な判定を行う。
【0045】
(e)検知出力手段324
検知出力手段324は、第1及び第2の判定手段323A・Bの判定が何れも肯定的であったときに、被検知対象である手などが検知された旨を表す検知信号を出力する。図6のごとく、重心画素が検知エリア内に位置し、かつ、重心画素の画素値D(N)≧Dsであれば、検知信号が出力される。
【0046】
本例の人体検知センサ1は、重心位置が検知エリア内であるという第1の判定条件と、重心画素の画素値がDs以上という第2の判定条件と、が何れも肯定的にクリアされたときに検知信号を出力する。この人体検知センサ1によれば、例えば、図8のような鉢面150からの鏡面反射光や、図9のようなノイズ的な外乱光による誤検知を未然に抑制できる。図8の鏡面反射光の場合では、黒丸で示す重心位置が検知エリア外に位置することから非検知と判断可能である。図9のごとく、鏡面反射光に重畳してノイズ的な外乱光が入射したことで重心位置が検知エリア内にずれて位置した場合には、重心画素の画素値がDsに満たないことから非検知と判断可能である。
【0047】
以上のように本例の人体検知センサ1によれば、重心位置が適正であるか否か、及び重心画素の画素値が適正であるか否か、の判定結果の組み合わせに応じて、手かざし操作を精度高く検知可能である。人体検知センサ1では、重心位置の位置判定に対して重心画素の画素値に関する閾値判定が組み合わされ、これにより検知精度が向上されている。
【0048】
なお、本例では、簡易的な計算により重心位置を算出したが、計算処理能力に余裕があれば数学的に厳密に重心位置を算出しても良い。
また、本例では、重心画素の画素値D(N)に対する閾値Dsの値を具体的に例示していないが、ラインセンサ261の特性や周囲の明るさ等に応じて、適宜設定できる。
【0049】
なお、本例は、洗面台15に人体検知センサ1を適用した例であるが、キッチンの水栓であっても良い。さらに、自動洗浄機能付きの小用便器の自動給水装置のセンサとして、本例の人体検知センサ1を適用することも可能である。さらには、手かざし操作や人体に反応して点灯する照明や自動扉等、各種の自動装置に対して、この人体検知センサ1を適用することもできる。
なお、本例では、センサユニット2と制御ユニット3とを別体で構成している。これに代えて、センサユニット2と制御ユニット3とを一体的に構成し、水栓16に収容することも良い。
【0050】
なお、本例は、受光動作中の露光時間の長さを制御するために電子シャッターを採用している。電子シャッターは必須ではなく省略することもできるが、電子シャッターに代えて、ラインセンサ261に対する光の入射を物理的に遮断する機械式シャッターを採用しても良い。
なお、ラインセンサ261の各画素260に感度のばらつきがある場合等であれば、各画素260の受光量を補正してから検知処理を実行することも良い。
【0051】
(実施例2)
本例は、実施例1の人体検知センサに基づいて、第2の判定手段の構成を変更した例である。この内容について、図10を用いて説明する。
本例は、重心画素の画素値が適正か否かという実施例1の判定に代えて、重心画素の周辺を含めて画素値の総和が適正か否かの判定を実行する第2の判定手段の例である。
【0052】
本例では、図10のごとく、重み係数が全て1である1×3画素サイズのオペレータ268を利用して、差分データD(x)(図5参照。)に空間フィルタ処理を施している。このオペレータ268は、演算対象画素266を中心とした1×3画素サイズの対象範囲に対して重ね合わせられたとき、各画素の画素値D(x)と対応する重み係数との乗算値を積算して演算対象画素266のデータ値F(x)を算出するオペレータである。例えば、画素番号6番の画素が演算対象画素であれば、フィルタ処理によるデータ値は、F(6)=D(5)+D(6)+D(7)となる。図10のオペレータ268は、ローパスフィルタのオペレータの一種であり、差分データD(x)を平滑化させるように作用する。
【0053】
このフィルタ処理データF(x)のうちの重心画素のデータ値(重心画素と1近傍画素の画素値D(x)の総和)が所定値以上であるか否かを判定すれば、第2の判定手段による判定の確実性を向上できる。例えば、検知と判定されるべき状況であるにも関わらず、ノイズ的な原因等によって重心画素の画素値が周囲よりも小さくなっている場合や、受光効率が悪い欠陥画素が重心画素に当たってしまった場合等であっても、肯定的な判定が可能になる。
【0054】
なお、その他の構成及び作用効果については、実施例1と同様である。
なお、本例に代えて、2近傍画素を含めた1×5画素サイズのオペレータ等、空間フィルタ処理に適用するオペレータのサイズについては適宜、変更可能である。オペレータ268としては、ローパスフィルタのオペレータであれば本例の作用効果を得ることができ、その重み係数については適宜、変更可能である。
また、本例では、フィルタ処理データF(x)に対する閾値を具体的に例示していないが、ラインセンサ261の特性や、周囲の明るさや、ノイズ的な外乱光の特性等に応じて、適宜設定できる。
【0055】
(実施例3)
本例は、実施例1の人体検知センサに基づいて、第2の判定手段の構成を変更した例である。この内容について、図11〜13を用いて説明する。
本例は、重心画素の画素値D(x)(図6参照。)が適正であるか否かという実施例1の判定に加えて、重心画素周辺の画素値D(x)の変化度合いが適正であるか否かの判定を実行する第2の判定手段の例である。
【0056】
本例では、図11のごとく、重み係数が−1、0、1の1×3画素サイズのオペレータ268を利用して差分データD(x)に空間フィルタ処理を施している。例えば、図10の場合と同様、画素番号6番の画素が演算対象画素であれば、フィルタ処理後のそのデータ値はF(6)=D(7)−D(5)となる。図11のオペレータ268は、ハイパスフィルタのオペレータの一種であり、差分データD(x)の受光量分布を画素の並び方向に微分して位置的な変化度合いを強調できる。
【0057】
オペレータ268による空間フィルタ処理の例を図12及び図13に示す。図12は、手かざし操作による拡散反射光が入射したときの例である。図13は、ノイズ的な外乱光が検知エリアに入射したときの例である。これらの図では、空間フィルタ処理の対象となる差分データD(x)のグラフが上段に配置され、空間フィルタ処理後のフィルタ処理データF(x)のグラフが下段に配置されている。
【0058】
図12のごとく、手かざし操作による拡散反射光が入射した場合には、差分データD(x)の受光量分布が正規分布に近いなだらかな曲線形状となる。その受光量分布のピーク付近に位置する重心画素(黒丸で図示)、及びその周辺の画素では、フィルタ処理データF(x)のデータ値がゼロに近くなっている。
一方、ノイズ的な外乱光が入射したとき、図13のような差分データD(x)が得られる場合がある。ノイズ的な外乱光に基づく差分データD(x)の場合、その受光量分布に滑らかさがなくギザギザになる傾向がある。本例の空間フィルタ処理に適用するオペレータ268によれば、このような受光量分布のギザギザ度合いが強調されたフィルタ処理データF(x)を生成できる。
【0059】
本例の第2の判定手段では、前記フィルタ処理データF(x)のうち、重心画素を含む所定範囲(本例では、2近傍画素を含む5画素の範囲)に属する各画素のデータ値F(x)の絶対値がFsを超えないこと、という判定条件が追加されている。
図13の場合であれば、まず、差分データD(x)については、重心位置が検知エリアに含まれていると共に、重心画素の画素値が所定値Ds以上となっている。一方、フィルタ処理データF(x)については、所定範囲に属する画素の中にデータ値F(x)がFsを超える画素が含まれている。本例で追加されたデータ値F(x)に関する上記の判定条件に適合しないことから、図13のようなノイズ的な外乱光は検知の対象から排除される。
一方、図12のような手かざし操作による拡散反射光の場合であれば、本例で追加された判定条件によっても肯定的な判定が可能である。同図の拡散反射光については、本例の人体検知センサによって検知と判断可能である。
【0060】
なお、その他の構成及び作用効果については、実施例1と同様である。
なお、本例に代えて、2近傍画素を含めた1×5画素サイズや1×2画素サイズのオペレータ等、空間フィルタ処理に適用するオペレータのサイズについては適宜、変更可能である。オペレータ268としては、ハイパスフィルタのオペレータであれば本例の作用効果を得ることができ、その重み係数については適宜、変更可能である。
また、本例では、フィルタ処理データF(x)に対する閾値Fsの値を具体的に例示していないが、実施例2と同様、適宜設定できる。
【0061】
(実施例4)
本例は、実施例1の構成を基にして、重心位置をサブピクセル(副画素)精度で特定した例である。この内容について、実施例1で参照した図6、及び図14及び図15を参照して説明する。
図14は、図6における左端の画素番号ゼロの画素から特定の画素までの画素範囲に含まれる各画素の画素値(差分データD(x))の積算値の変化を示している。同図の横軸は前記特定の画素の画素番号xを示し、縦軸は積算値である積算受光量S(x)を示している。S(x)及び同図中のSDは、次式の通りである。特に、SDは、実施例1と同様、全画素の画素値(差分データD(x))の総和である。
図15は、図14におけるS(x)=SD/2近傍の破線で囲まれた領域の拡大図である。
【0062】
【数1】
【数2】
【0063】
本例では、図14及び図15に示すごとく、S(x)=SD/2となる位置をサブピクセル精度で算出し、この位置を重心位置として特定している。
本例の重心位置の特定方法では、まず、画素番号が連続する2画素であって、画素番号が小さい方の第1の画素(N−1)の積算受光量S(N−1)がSDの1/2よりも小さく、かつ、画素番号が大きい方の第2の画素(N)の積算受光量S(N)がSD/2以上である2画素が特定される。
【0064】
ここで、第1の画素(N−1)と第2の画素(N)との間の1画素分の位置的な範囲において、積算受光量S(x)が図15に示すように直線的に変化していると仮定すれば、次の比例式が成り立つ。
【数3】
【0065】
この式を変形すると、OFFSET(偏差)を次式のように表すことができる。
【数4】
重心位置は、第1の画素(N−1)の位置を基準として、OFFSETの分だけ第2の画素(N)側へずらした位置として次式にように特定できる。
【数5】
【0066】
本例のように、重心位置をサブピクセル精度で特定できれば、距離的な分解能の向上に有効であり、重心位置が検知エリアに属しているか否かの判定精度を向上できるという効果が得られる。
このように重心位置をサブピクセルの精度で算出できれば、相対的に、撮像素子であるラインセンサにおいて必要となる画素数を抑制できる。画素数の少ないラインセンサであれば、低消費電力を期待できる。ラインセンサの消費電力を抑制できれば、例えば、水流発電機の発電電力を電力供給源とした自動水栓等への適用が比較的容易になる。
【0067】
なお、その他の構成及び作用効果については、実施例1と同様である。
本例では、第1の画素(N−1)と第2の画素(N)との間の1画素分の位置的な範囲においてS(x)が直線的に変化していると仮定して、重心位置をサブピクセル精度で求めている。これに代えて、前記1画素分の位置的な範囲内でS(x)が曲線的に変化していると仮定して重心位置を求めることも良い。
【0068】
以上、実施例1〜4のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【符号の説明】
【0069】
1…人体検知センサ、15…洗面台、16…水栓(自動水栓)、11…ソレノイド、12…給水配管、2…センサユニット、25…発光部、251…LED素子、26…撮像部、260…画素、261…ラインセンサ(撮像素子)、268…オペレータ、3…制御ユニット、30…制御基板、31…撮像制御部、32…人体検知部、321…差分演算手段、322…重心特定手段、323A…第1の判定手段、323B…第2の判定手段、324…検知出力手段、33…給水制御部
【特許請求の範囲】
【請求項1】
1次元あるいは2次元的に画素が配列された撮像素子を含む撮像部と、該撮像部に対して所定方向にオフセットして配設された発光部を備え、発光部が投射する光に応じて生じた反射光を撮像部で受光して被検知対象を検知する人体検知センサであって、
前記反射光を受光した各画素の受光量に基づいて、前記撮像素子における各画素の配列領域である受光エリア内の前記反射光の重心位置を特定する重心特定手段と、
前記受光エリアの一部に設定された検知エリアに前記重心位置が属しているか否かを判定する第1の判定手段と、
各画素の受光量に所定の空間フィルタ処理を施して得られたフィルタ処理データのうちの前記重心位置に当たる重心画素のデータ値に関する閾値処理の結果、及び前記重心画素の受光量の度合いに関する閾値処理の結果、のうちの少なくともいずれか一方に応じて前記重心画素の受光度合いの適否を判定する第2の判定手段と、
前記第1及び第2の判定手段がいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段と、を備えた人体検知センサ。
【請求項2】
請求項1において、前記第2の判定手段では、前記重心画素の受光量が所定値以上であったこと、が肯定的な判定のための条件として設定されている人体検知センサ。
【請求項3】
請求項1において、前記第2の判定手段では、周辺画素の受光量の総和の度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値が所定値以上であったこと、が肯定的な判定のための条件として設定されている人体検知センサ。
【請求項4】
請求項1〜3のいずれか1項において、前記第2の判定手段では、前記所定方向における各画素の受光量の位置的な変化度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値、及び前記重心画素近傍の所定範囲に属する他の画素のデータ値がいずれも所定値以内であったこと、が肯定的な判定のための条件として設定されている人体検知センサ。
【請求項5】
請求項1〜4のいずれか1項において、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達する直前の第1の画素、及び前記総受光量の半分に達したときの第2の画素を特定した上で、
前記総受光量の半分から前記第1の画素における積算受光量を差し引いた受光量を前記第2の画素の受光量により除算して求められる偏差の分だけ、前記第1の画素の位置を基準として前記第2の画素側へずらした位置を前記重心位置として特定する人体検知センサ。
【請求項6】
請求項1〜4のいずれか1項において、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達したときの画素の位置を前記重心位置として特定する人体検知センサ。
【請求項7】
底部に排水口を設けた鉢の内部に吐水する水栓と、
請求項1〜6のいずれか1項に記載された人体検知センサと、
該人体検知センサの検知信号に応じて、前記水栓の吐止水の切替、あるいは吐水量の調整を実行する給水制御手段と、を備え、
前記人体検知センサが備える撮像部の撮像範囲には、前記鉢の内周面が含まれている自動水栓。
【請求項1】
1次元あるいは2次元的に画素が配列された撮像素子を含む撮像部と、該撮像部に対して所定方向にオフセットして配設された発光部を備え、発光部が投射する光に応じて生じた反射光を撮像部で受光して被検知対象を検知する人体検知センサであって、
前記反射光を受光した各画素の受光量に基づいて、前記撮像素子における各画素の配列領域である受光エリア内の前記反射光の重心位置を特定する重心特定手段と、
前記受光エリアの一部に設定された検知エリアに前記重心位置が属しているか否かを判定する第1の判定手段と、
各画素の受光量に所定の空間フィルタ処理を施して得られたフィルタ処理データのうちの前記重心位置に当たる重心画素のデータ値に関する閾値処理の結果、及び前記重心画素の受光量の度合いに関する閾値処理の結果、のうちの少なくともいずれか一方に応じて前記重心画素の受光度合いの適否を判定する第2の判定手段と、
前記第1及び第2の判定手段がいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段と、を備えた人体検知センサ。
【請求項2】
請求項1において、前記第2の判定手段では、前記重心画素の受光量が所定値以上であったこと、が肯定的な判定のための条件として設定されている人体検知センサ。
【請求項3】
請求項1において、前記第2の判定手段では、周辺画素の受光量の総和の度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値が所定値以上であったこと、が肯定的な判定のための条件として設定されている人体検知センサ。
【請求項4】
請求項1〜3のいずれか1項において、前記第2の判定手段では、前記所定方向における各画素の受光量の位置的な変化度合いを画素毎に求める空間フィルタ処理が施されて前記フィルタ処理データが取得されると共に、
該フィルタ処理データのうちの前記重心画素のデータ値、及び前記重心画素近傍の所定範囲に属する他の画素のデータ値がいずれも所定値以内であったこと、が肯定的な判定のための条件として設定されている人体検知センサ。
【請求項5】
請求項1〜4のいずれか1項において、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達する直前の第1の画素、及び前記総受光量の半分に達したときの第2の画素を特定した上で、
前記総受光量の半分から前記第1の画素における積算受光量を差し引いた受光量を前記第2の画素の受光量により除算して求められる偏差の分だけ、前記第1の画素の位置を基準として前記第2の画素側へずらした位置を前記重心位置として特定する人体検知センサ。
【請求項6】
請求項1〜4のいずれか1項において、前記重心特定手段は、前記撮像素子において前記所定方向に配列された各画素の受光量の総和である総受光量を算出すると共に、
前記所定方向のいずれか一方の端に位置する画素を起点とし、他方の端に向けて各画素の受光量を順番に積算した積算受光量が、前記総受光量の半分に達したときの画素の位置を前記重心位置として特定する人体検知センサ。
【請求項7】
底部に排水口を設けた鉢の内部に吐水する水栓と、
請求項1〜6のいずれか1項に記載された人体検知センサと、
該人体検知センサの検知信号に応じて、前記水栓の吐止水の切替、あるいは吐水量の調整を実行する給水制御手段と、を備え、
前記人体検知センサが備える撮像部の撮像範囲には、前記鉢の内周面が含まれている自動水栓。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−233879(P2012−233879A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2012−80036(P2012−80036)
【出願日】平成24年3月30日(2012.3.30)
【出願人】(302045705)株式会社LIXIL (949)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成24年3月30日(2012.3.30)
【出願人】(302045705)株式会社LIXIL (949)
【Fターム(参考)】
[ Back to top ]