
人体検知センサ
【課題】
1台で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる人体検知センサを提供することにある。
【解決手段】
第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成し、第2の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする。
1台で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる人体検知センサを提供することにある。
【解決手段】
第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成し、第2の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人体から放射される熱線を検出し、検知領域内での人の存否を検知する人体検知センサに関する。
【背景技術】
【0002】
従来より、一般の家庭や店舗、工場等の警備対象施設側に、異常を検知するセンサを設け、異常の情報を警備端末を介して警備センタの警備用センタ装置に通報する警備システムが用いられている。そして、異常を検知するセンサとして、警備対象施設内への侵入を検知する人体検知センサがある。この人体検知センサは、人間から放射される熱線を検出し、警戒領域内での人間の存否を検知するものである。
【0003】
より具体的には、人体検知センサは、集光光学系によって、焦電素子等の熱線の波長領域に感度を有する赤外線検知素子を用いた赤外線検知器に入射する熱線の検知セクタを形成し、その検知セクタ内の物体から放射される熱線を赤外線検知器に集光するようにし、その赤外線検知器の出力に基づく検知セクタ内からの熱線のエネルギーの変動量が所定のレベルを越えたときに、検知セクタ内への人間等の移動物体の侵入を検知するように構成されており、自動ドアの開閉や、防犯警備システムにおいて侵入者の検知のために広く用いられている。
【0004】
しかし、人体検知センサに用いられる焦電素子である赤外線検知素子は、熱線を検知するものであるので、人間以外の熱線を放射する小動物による誤報が発生することもある。そこで、人体検知センサにおいては、人間だけを検知し、小動物による誤報を防止するための対策が種々提案されており、その一つとして、複数の検知セクタを構成し、その複数のエリアからの各信号のANDをとることによって、人間とその他の非検知対象物とを区別する方法が知られている。
【0005】
この人間とその他の非検知対象物とを区別する方法として、例えば特許文献1で示されるものがある。特許文献1では、焦電素子と光学系との組み合わせにより、一方の焦電素子の検出軸の上方又は下方にもう一方の光学ユニットの検知セクタ(特許文献1では「検知ゾーン」と記載)が設定されている。両方の検出軸は重ならないように(人体検知センサからの距離が同じにならないように)、適切な間隔(ギャップ)を確保して配置されている。そして、両方の検知セクタからのANDをとることによって小動物による誤報を低減している。このとき検出軸のギャップの大きさにより、小動物非検知性能が決まる。更に、検出軸を下に向けるのにともない、ギャップである上段の検出軸と下段の検出軸との間隔が大きくなる。これは、「検出軸を下に向ける」=「最長警戒距離を短くする」のであれば有効である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−213673号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、しかし、この種類の人体検知センサが取り付けられる環境は様々であり、最長警戒距離の長さ以外に、天井の高さなど取り付け高さも状況により異なることになる。人体検知センサが警戒する距離は1つではなく、人体検知センサから近い距離も遠い距離も1台の人体検知センサで警戒する場合が多いのが現状である。1つの光学系は複数の放物面鏡やフレネルレンズ等で構成されており、それぞれが警戒領域内の個々の検知セクタを形成する役割を担っている。そして、ギャップの最適な設定は、人体検知センサから各検知セクタまでの距離により異なる。なぜなら、人体検知センサから見た人間や小動物の大きさは、この距離によって変わるからである。
【0008】
一般に、人体検知センサから近距離の検知セクタについては、人体検知センサから検知セクタ(検知面)までの距離は、人体検知センサの取り付け高さに大きく影響される。また、検知セクタを人体検知センサから遠距離の位置で考えると、人体検知センサから検知セクタまでの距離は警戒距離(水平距離)に影響される。検知セクタを人体検知センサから近距離の位置で考えると、取り付け高さによって最適なギャップに設定することが望ましく、遠距離の検知セクタについては、警戒距離によって最適なギャップに設定することが望ましい。しかし、従来の人体検知センサでは、警戒距離によってギャップを変更しているものの、取り付け高さについては対応していない。
【0009】
従来の人体検知センサでは、2つの焦電素子により形成される検知セクタ間のギャップを制御する手段として、2つの方式が紹介されている。特許文献1では、1本の検出軸についての記述しかないが、実際には、遠距離も近距離も1台の人体検知センサで警戒する場合が多い。デュアルツインセンサの間隔を変更する方式では、遠距離のギャップを大きくすると、近距離のギャップも同じように大きくなってしまう。また、光学ユニットを2個使用する方式では、光軸の向きは光学ユニットの回転により制御され、それらの光学系はいずれも一つで構成されており、この方式でも遠距離と近距離のギャップを独立して制御することができない(遠距離と近距離の検知セクタの向きを独立して制御することができない)。従って、いずれの方式でも、遠距離と近距離のギャップをそれぞれ最適な大きさに制御することはできない。
【0010】
尚、ここで、遠距離及び近距離とは、人体検知センサからの絶対的な距離により定められるものではなく、遠い側と近い側といった相対的な位置関係を示すものである。人体検知センサで遠距離及び近距離を捉えた場合には、例えば、その人体検知センサが警戒可能な最長距離のおよそ半分の距離を基準に、それより長い距離を遠距離、それより短い距離を近距離と考えることができるが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【0011】
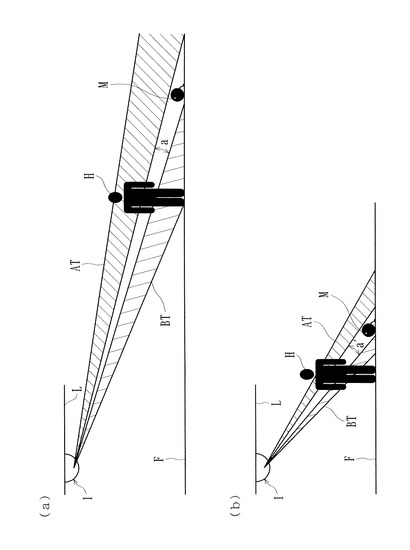
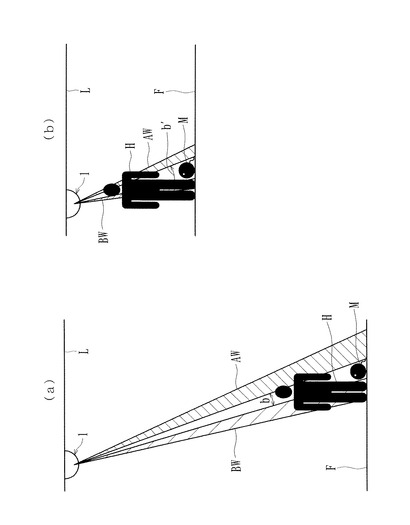
まず、近距離の検知セクタに着目して考える。従来の人体検知センサでは、人体検知センサの取り付け高さの変更に対応していないため、ある特定の高さに合わせてギャップを設定する。例えば、図11(a)に示すように、近距離の検知セクタAW,BWの光学系を取り付け高さが高い場合に合わせて設定した場合、その設定のままで低い位置に取り付けるとギャップaが小さくなり、小動物Mにより誤報が発生する可能性が高くなる。逆に、図11(b)に示すように、近距離の検知セクタAW,BWの光学系を取り付け高さが低い場合に合わせて設定した場合、その設定のまま高い位置に取り付けるとギャップbが大きくなり、人間Hを失報する(検知されなければならないときに検知されない)可能性が高くなる。
【0012】
従来の人体検知センサでは、このギャップを「検出軸を下に向ける」ことで大きくするが、検出軸を下に向けることと取り付け高さが低いことは、機能上意味が一致しない。取り付け高さを高くするときにも、検出軸を下に向ける必要があるわけで、従って、取り付け高さが高い場合にも低い場合にも人間と小動物との両方を精度良く識別し誤報を抑えることができない。
【0013】
同様の理由から、遠距離の検知セクタの光学系を最長警戒距離が短い場合に合わせて設計した場合、最長警戒距離が長い条件ではギャップが大きくなり、人間を失報する可能性が高くなる。逆に、最長警戒距離が長い場合に合わせて設計した場合、最長警戒距離が短い条件ではギャップが小さくなり、小動物により誤報が発生する可能性が高くなる。
【0014】
本発明は、このような事情に鑑みてなされたもので、1台で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる人体検知センサを提供することにある。
【課題を解決するための手段】
【0015】
請求項1記載の人体検知センサは、第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成し、第2の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする。
【0016】
請求項2記載の人体検知センサは、第1の光学ユニットの光学系が、垂直方向に揺動することを特徴とする。
【0017】
請求項3記載の人体検知センサは、第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠近それぞれの検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする。
【0018】
請求項4記載の人体検知センサは、第1の光学ユニットの光学系の遠距離用の検知セクタと第2の光学ユニットの光学系の遠距離用の検知セクタとの仰角のギャップが、任意に設定可能であり、第1の光学ユニットの光学系の近距離用の検知セクタと第2の光学ユニットの光学系の近距離用の検知セクタとの仰角のギャップが、任意に設定可能であることを特徴とする。
【0019】
請求項5記載の人体検知センサは、第1の光学ユニットの光学系又は第2の光学ユニットの光学系のそれぞれの光軸上に設けられ、それぞれに入光する光の一部を遮断する感度調整板を備え、感度調整板が遮断する遮断量を増減可能で、感度調整板により光学系に入光する光量が変わることで、焦電素子の感度が調整されることを特徴とする。
【0020】
請求項6記載の人体検知センサは、感度調整板が遮断する光の遮断量を、光学系の仰角に応じて変化させることが可能なことを特徴とする。
【発明の効果】
【0021】
請求項1〜請求項4の発明によれば、第1の光学ユニットの検知セクタ及び第2の光学ユニットの検知セクタの角度の関係を適宜設定可能で、1台の人体検知センサで、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる。
【0022】
請求項5の発明によれば、感度調整板により光学系に入光する光量が変わることで、焦電素子の感度が調整され、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な設定を得ることができる。
【0023】
請求項6の発明によれば、感度調整板が遮断する光の遮断量を、光学系の仰角に応じて変化させることが可能なことから、光学系の状態を設定するのみで容易に焦電素子の感度を調整することができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る第1の実施例の人体検知センサを示す構成図である。
【図2】同人体検知センサの光学ユニットの構造を示す説明図である。
【図3】同人体検知センサの動作を示す説明図である。
【図4】同人体検知センサの動作を示す説明図である。
【図5】同人体検知センサの他の光学ユニットの構造を示す説明図である。
【図6】本発明に係る第2の実施例の人体検知センサを示す構成図である。
【図7】同人体検知センサの光学ユニットの構造を示す説明図である。
【図8】同人体検知センサの他の光学ユニットの構造を示す説明図である。
【図9】本発明に係る第3の実施例の人体検知センサの光学ユニットを示す説明図である。
【図10】同人体検知センサの光学ユニットの他の例を示す説明図である。
【図11】従来の人体検知センサの動作を示す説明図である。
【発明を実施するための形態】
【0025】
本発明の形態における人体検知センサは、人体から放射される熱線を検出し、検知領域内での人間の存否を検知するものである。尚、以下で、遠距離及び短距離の語が用いられているが、遠距離及び近距離とは、人体検知センサからの絶対的な距離により定められるものではなく、遠い側と近い側といった相対的な位置関係を示すものである。人体検知センサで遠距離及び近距離を捉えた場合には、例えば、その人体検知センサが警戒可能な最長距離のおよそ半分の距離を基準に、それより長い距離を遠距離、それより短い距離を近距離と考えることができるが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【0026】
また、以下で、人体検知センサの取り付け高さとして、取り付け高さが高い及び取り付け高さが低いの語が用いられているが、高い低いとは、人体検知センサを取り付ける天井の高さの絶対的な数値により定められるものではなく、後述するギャップの大きさにより人間と小動物の検知に影響を及ぼす可能性のある相対的な位置関係を示すものである。人体検知センサで取り付け高さが高い及び取り付け高さが低いを捉えた場合には、例えば、人体検知センサの検知可能な最大距離との関係で決まる取り付け可能な最大の高さと、最小の高さのおよそ中間を基準に、それより高い場合には取り付け高さが高く、それより低い場合は取り付け高さが低いと考えることができるが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【実施例1】
【0027】
以下、本実施例を図面を参照しながら具体的に説明する。図1は、本発明に係る第1の実施例の人体検知センサを示す構成図である。図2は、同人体検知センサの光学ユニットの構造を示す説明図である。図3は、同人体検知センサの動作を示す説明図である。図4は、同人体検知センサの動作を示す説明図である。図5は、同人体検知センサの他の光学ユニットの構造を示す説明図である。
【0028】
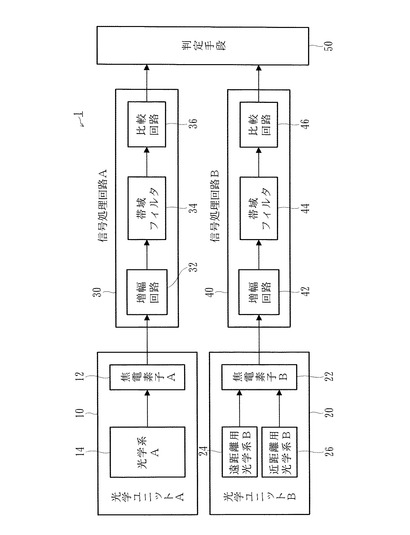
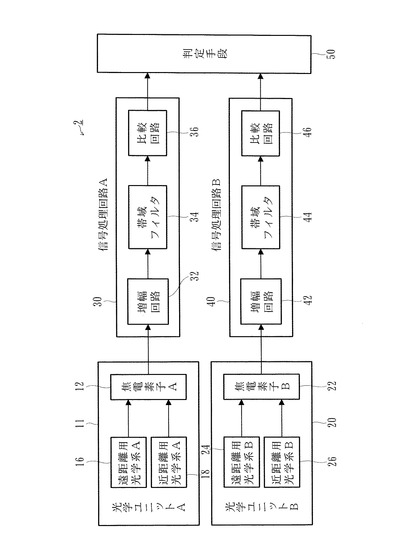
図1〜図5における人体検知センサ1は、光学ユニットA10,光学ユニットB20と、信号処理回路A30,信号処理回路B40と、判定手段50とを備えている。光学ユニットA10及び光学ユニットB20は、人間Hの身体から放射される熱線を集光する光学系A14,遠距離用光学系B24及び近距離用光学系B26と、光学系A14,遠距離用光学系B24及び近距離用光学系B26に集光された熱線を検知する焦電素子A12,焦電素子B22をそれぞれ有している。
【0029】
焦電素子A12,焦電素子B22は、赤外線検知素子を2つ有するツイン型のものであるが、必ずしもツイン型のものである必要はなく、また、焦電素子でなくても人体を検知可能なものであれば、限られるものではない。尚、焦電素子A12,焦電素子B22にツイン型を用いることで、例えば、外乱光が、2つの赤外線検知素子の両方に入射した場合であっても、赤外線検知素子の出力は互いに相殺されるため、外乱光等の背景雑音に強く、外乱光による誤報を抑えることができる。
【0030】
光学系A14、遠距離用光学系B24及び近距離用光学系B26は、人間Hの身体から放射される熱線を焦電素子A12,焦電素子B22に集光し、後述する焦電素子A12,焦電素子B22の検知セクタの配置を形成させるものである。光学系A14は、放物面鏡が上下二段で構成され、下段が遠距離用光学系A14aであり、上段が近距離用光学系A14bである。そして、遠距離用光学系A14aが遠距離用の検知セクタATを形成し、近距離用光学系A14bが近距離用の検知セクタAWを形成する。光学系A14は、焦電素子A12に対し垂直方向に揺動し、それにより、検知セクタAT,AWが、垂直方向に揺動することになる。尚、本実施例では、光学系A14のみが揺動する構造になっているが、焦電素子A12を含め光学ユニットA10全体が垂直方向に揺動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。
【0031】
尚、ここで、遠距離用及び近距離用とあるが、まず、異なる距離の検知セクタAT,AWを構成させるために2つの名称を用いているのが前提である。その上で、遠距離用及び近距離用とは、人体検知センサ1から検知セクタAT,AWの伸びる距離を絶対的な数値により定められるものではなく、遠い側と近い側といった相対的な位置関係を示すものである。例えば、人体センサ1が取り付けられている状態で、その警戒している最も遠い距離のおよそ半分を基準に、それより長い距離を警戒する検知セクタATを構成する下段の光学系を遠距離用光学系A14aとし、それより短い距離を警戒する検知セクタAWを構成する上段の光学系を近距離用光学系A14bとするが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【0032】
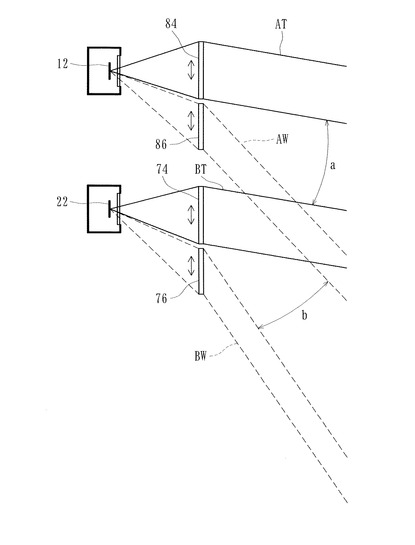
一方、光学ユニットB20では、光学ユニットA10とは異なり、遠距離用光学系B24及び近距離用光学系B26の2つの光学系を備えている。遠距離用光学系B24及び近距離用光学系B26は、それぞれが放物面鏡で上下二段に配置されている。そして、遠距離用光学系B24が遠距離用の検知セクタBTを形成し、近距離用光学系B26が近距離用の検知セクタBWを形成する。遠距離用光学系B24及び近距離用光学系B26は、焦電素子B22に対しそれぞれ独立して垂直方向に揺動し、それにより、検知セクタBT,BWが、垂直方向に揺動することになる。尚、本実施例では、遠距離用光学系B24及び近距離用光学系B26がそれぞれ揺動する構造になっているが、遠距離用光学系B24及び近距離用光学系B26がそれぞれ揺動する構造のまま、焦電素子B22を含め光学ユニットB20全体が垂直方向に揺動することにより、検知セクタBT,BWが、垂直方向に揺動するようにしてもよい。
【0033】
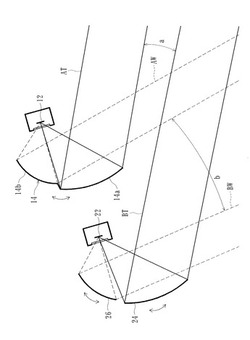
そして、光学ユニットA10と光学ユニットB20とは、図2に示すように、上下にずらして配置されており、遠距離用の検知セクタATと検知セクタBT、及び近距離用の検知セクタAWと検知セクタBWとが、それぞれ交差せず且つ所定のギャップa,bを備えるように配置されている。
【0034】
信号処理回路A30,信号処理回路B40は、増幅回路32,42と、帯域フィルタ34,44と、比較回路36,46とから構成されている。増幅回路32,42は、焦電素子A12,焦電素子B22の出力を増幅する。帯域フィルタ34,44は、増幅回路32,42の出力から不要な周波数成分を除いて所定の周波数成分の信号のみを出力する。比較回路36,46は、帯域フィルタ34,44を通った信号を所定の閾値と比較して、閾値以上の信号があった場合にパルス信号を出力する。判定手段50は、信号処理回路A30,信号処理回路B40からの2つのパルス信号のANDから被検知物体である人間Hを検知したと判断し、検知信号を出力するものである。
【0035】
本実施例の人体検知センサ1は、二つの光学ユニットA10と光学ユニットB20のうち一方の光学系を遠距離用、近距離用の二つに分割し、人体検知センサ1の取り付け高さや最長警戒距離に応じて遠距離、近距離のギャップをそれぞれ調整可能とするものである。こうすることで、例えば最長警戒距離が長くて取り付け高さが低いときには、遠距離のギャップ(図3のギャップa)を小さくしながら近距離のギャップ(図4のギャップb)を大きくすることができる。また、例えば、最長警戒距離が短くて取り付け高さが高いときには、遠距離のギャップ(図3のギャップa)を大きくしながら近距離のギャップ(図4のギャップb)を小さくすることができる。
【0036】
より具体的には、例えば、「最長警戒距離が短い場合」と「最長警戒距離が長い場合」を比較すると、人体検知センサ1からみた人間Hと小動物Mの大きさは、人体検知センサからの距離が大きくなるほど小さくなる(図3参照)。まず、比較的長距離を警戒する場合を考える(図3(a))。このとき、人体検知センサ1から見た小動物は十分に小さいので、ギャップaは大きくする必要がない。このギャップaを大きく設定してしまうと、逆に人間Hを検知しない可能性が高くなってしまう。比較的短距離を警戒する場合(図3(b))は、人体検知センサ1から見た小動物Mは十分に小さいとはいえないため、最長警戒距離が長い場合に比べてギャップa’を大きく設定しなければ小動物Mによる誤報の可能性が高くなる。ギャップa’を大きく設定しても、この距離では人体検知センサ1から見た人間Hは十分に大きいため、失報の可能性は小さい。このように、遠距離を警戒する検知セクタAT,BTの最適なギャップaは最長警戒距離によって異なるが、本実施例の人体検知センサ1では、遠距離用光学系B24の仰角を独立して可変することにより、警戒距離に応じて最適なギャップaに調整することが可能になる。
【0037】
次に、「取り付け高さが低い場合」と「取り付け高さが高い場合」を比較する。取り付け高さを変えた場合、図4に示すように、人体検知センサ1から近距離の検知セクタAW,BWに関しては、人体検知センサ1から人間H及び小動物Mまでの距離が、この高さの影響を大きく受ける。まず、比較的高い位置に取り付ける場合を考えると、図4(a)に示すように、人体検知センサ1から見た小動物Mは十分に小さいので、ギャップbは大きくする必要がない。このギャップbを大きく設定してしまうと、逆に人間Hを検知しない可能性が高くなってしまう。図4(b)に示すように、比較的低い位置に取り付ける場合は、人体検知センサ1から見た小動物Mは十分に小さいとはいえないため、高い位置に取り付ける場合に比べてギャップb’を大きく設定しなければ小動物Mによる誤報の可能性が高くなる。ギャップb’を大きく設定しても、この距離では人体検知センサ1から見た人間Hは十分に大きいため、失報の可能性は小さい。このように、近距離を警戒する検知セクタAW,BWの最適なギャップbは、取り付け高さによって異なるが、本実施例の人体検知センサ1では、近距離用光学系B26の仰角を独立して可変することにより、警戒距離に応じて最適なギャップbに調整することが可能になる。
【0038】
実際には、取り付け高さが高くて警戒距離が短い場合や、取り付け高さが低くて警戒距離が長い場合等、様々な取り付け状況があるが、本実施例の人体検知センサ1では、いずれの状況にも対応可能である。このように、第1の光学ユニットA10の光学系A14の遠距離用の検知セクタATと第2の光学ユニットB20の遠距離用光学系B24の遠距離用の検知セクタBTとの仰角のギャップaを任意に設定可能であり、さらに、第1の光学ユニットA10の光学系A14の近距離用の検知セクタAWと第2の光学ユニットB20の近距離用光学系B26の近距離用の検知セクタBWとの仰角のギャップbを任意に設定可能であり、1台の人体検知センサ1で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間Hを検知し且つ小動物Mを検知しない理想的な検知セクタの配置を得ることができる。尚、光学ユニットA10と光学ユニットB20とを、独立してそれぞれ揺動するようにしてもよいし、一方の光学ユニットを揺動させるとそれに連動して他方の光学ユニットが揺動するような構造にしてもよく、各光学系のどれとどれを連動させるか又はさせないかは、任意である。
【0039】
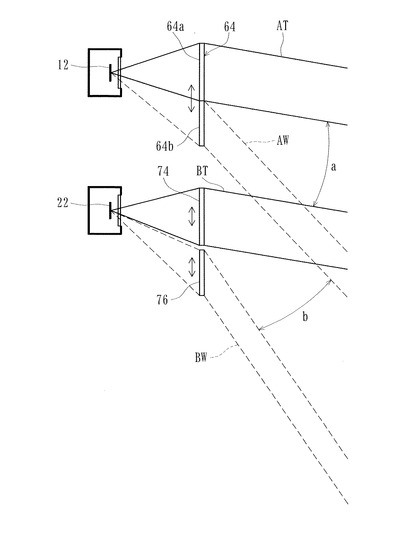
尚、図2に示す人体検知センサ1の光学ユニットA10と光学ユニットB20が、放物面鏡を使用した場合であるが、放物面鏡に限られるものではなく、例えば図5に示すように、光学系A64や遠距離用光学系B74及び近距離用光学系B76として、レンズ(例えばフレネルレンズ)を用いることも可能である。
【0040】
図5の場合、2つの光学ユニットを完全に上下に配置し、上方の光学ユニットは、光学ユニットA10と同様に、光学系A64の1つであり、その光学系A64の上段が遠距離用の検知セクタATを形成する遠距離用光学系A64aで、下段が近距離用の検知セクタAWを形成する近距離用光学系A64bである。また、下方の光学ユニットは、光学ユニットB20と同様に、遠距離用光学系B74と近距離用光学系B76の2つに分割されており、上段が遠距離用の検知セクタBTを形成する遠距離用光学系B74で、下段が近距離用の検知セクタBWを形成する近距離用光学系B76である。
【0041】
図5の光学系A64は、それが上下に移動し、焦電素子A12に入射する角度が変わり、結果として検知セクタAT,AWの仰角を可変させることができる。また、遠距離用光学系B74と近距離用光学系B76とは、それぞれに独立して上下に移動し、焦電素子B22に入射する角度が変わり、結果として検知セクタBT,BWの仰角を可変させることができる。このように、光学系A64、遠距離用光学系B74及び近距離用光学系B76を上下に移動することで、遠距離用の検知セクタATと検知セクタBTとのギャップa及び近距離用の検知セクタAWと検知セクタBWとのギャップbを、それぞれ任意に設定することができる。
【0042】
尚、図5では、光学系A64のみが上下動する構造になっているが、焦電素子A12を含め光学ユニット全体が上下動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。また、遠距離用光学系B74及び近距離用光学系B76がそれぞれ上下動する構造になっているが、遠距離用光学系B74及び近距離用光学系B76がそれぞれ上下動する構造のまま、焦電素子B22を含め光学ユニット全体が上下動することにより、検知セクタBT,BWが、垂直方向に揺動するようにしてもよい。
【実施例2】
【0043】
実施例1では、第1の光学ユニットである光学ユニットA10の光学系A14は、遠距離用と近距離用とで分割されていなかったが、実施例1の第2の光学ユニットB20と同様に光学系を遠距離用及び近距離用の二つに分割し、取り付け高さや最長警戒距離に応じて近距離及び遠距離のギャップをそれぞれ調整可能とするようにしてもよい。本実施例では、その光学系を分割した場合を説明する。図6は、本発明に係る第2の実施例の人体検知センサを示す構成図である。図7は、同人体検知センサの光学ユニットの構造を示す説明図である。図8は、同人体検知センサの他の光学ユニットの構造を示す説明図である。
【0044】
図6〜図7における人体検知センサ2は、光学ユニットA11,光学ユニットB20と、信号処理回路A30,信号処理回路B40と、判定手段50とを備えている。本実施例の人体検知センサ2は、光学ユニットB20、信号処理回路A30及び信号処理回路B40が、実施例1のものと同様であり、説明を省略する。
【0045】
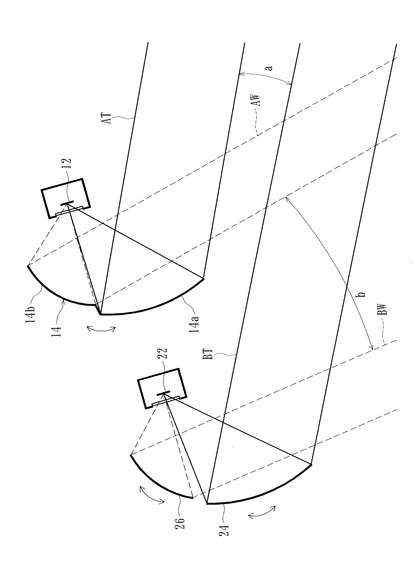
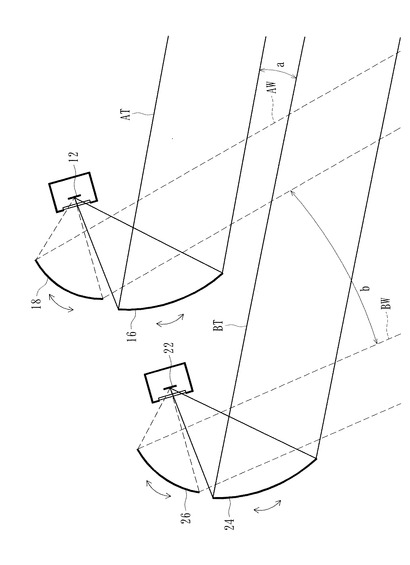
一方、本実施例における光学ユニットA11は、光学ユニットB20と同様に、遠距離用光学系A16及び近距離用光学系A18の2つの光学系を備えている。遠距離用光学系A16及び近距離用光学系A18は、それぞれが放物面鏡で上下二段に配置されている。そして、遠距離用光学系A16が遠距離用の検知セクタATを形成し、近距離用光学系A18が近距離用の検知セクタAWを形成する。遠距離用光学系A16及び近距離用光学系A18は、焦電素子A12に対しそれぞれ独立して垂直方向に揺動し、それにより、検知セクタAT,AWが、垂直方向に揺動することになる。尚、本実施例では、遠距離用光学系A16及び近距離用光学系A18がそれぞれ揺動する構造になっているが、遠距離用光学系A16及び近距離用光学系A18がそれぞれ揺動する構造のまま、焦電素子A12を含め光学ユニットA11全体が垂直方向に揺動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。
【0046】
そして、実施例1と同様に、光学ユニットA11と光学ユニットB20とは、図7に示すように、上下にずらして配置されており、遠距離用の検知セクタATと検知セクタBT、及び近距離用の検知セクタAWと検知セクタBWとが、それぞれ交差せず且つ所定のギャップa,bを備えるように配置されている。
【0047】
このような構造の人体検知センサ2によれば、実施例1の人体検知センサ1と同様に、取り付け高さが高くて警戒距離が短い場合や、取り付け高さが低くて警戒距離が長い場合等、様々な取り付け状況があるが、いずれの状況にも対応可能である。このように、第1の光学ユニットA11の遠距離用光学系A16の遠距離用の検知セクタATと第2の光学ユニットB20の遠距離用光学系B24の遠距離用の検知セクタBTとの仰角のギャップaを任意に設定可能であり、さらに、第1の光学ユニットA11の近距離用光学系A18の近距離用の検知セクタAWと第2の光学ユニットB20の近距離用光学系B26の近距離用の検知セクタBWとの仰角のギャップbを任意に設定可能であり、1台の人体検知センサ2で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間Hを検知し且つ小動物Mを検知しない理想的な検知セクタの配置を得ることができる。
【0048】
尚、図7に示す人体検知センサ2の光学ユニットA11と光学ユニットB20が、放物面鏡を使用した場合であるが、実施例1と同様に、放物面鏡に限られるものではなく、例えば図8に示すように、遠距離用光学系A84、近距離用光学系A86、遠距離用光学系B74及び近距離用光学系B76として、レンズ(例えばフレネルレンズ)を用いることも可能である。2つの光学系の配置は、実施例1の図5と同様だが、焦電素子A12に係る光学系の構造が異なり、焦電素子B22に係る光学系は図5と同様である。
【0049】
図8の形態では、上方の光学ユニットも下方の光学系と同様に、遠距離用光学系A84と近距離用光学系A86の2つに分割されており、上段が遠距離用の検知セクタATを形成する遠距離用光学系A84で、下段が近距離用の検知セクタBWを形成する近距離用光学系A86である。そして、遠距離用光学系A84と近距離用光学系A86とは、それぞれに独立して上下に移動し、焦電素子A12に入射する角度が変わり、結果として検知セクタAT,AWの仰角を可変させることができる。このように、遠距離用光学系A84、近距離用光学系A86、遠距離用光学系B74及び近距離用光学系B76を上下に移動することで、遠距離用の検知セクタATと検知セクタBTとのギャップa及び近距離用の検知セクタAWと検知セクタBWとのギャップbを、それぞれ任意に設定することができる。
【0050】
尚、図8では、遠距離用光学系A84及び近距離用光学系A86がそれぞれ上下動する構造になっているが、遠距離用光学系A84及び近距離用光学系A86がそれぞれ上下動する構造のまま、焦電素子A12を含め光学ユニット全体が上下動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。
【実施例3】
【0051】
尚、人体検知センサ1,2から検知セクタAT,AW,BT,BWで検知する人体H又は小動物Mまでの距離によって出力される信号の大きさが変わる場合には、光学系の調整機構によってその感度を調整することが可能である。仮に、人体検知センサ1,2から検知セクタAW,BWで検知する人体H又は小動物Mまでの距離が近いほど信号が大きくなるのであれば、その感度が小さくなるよう感度を調整するのが望ましい。なぜなら、それぞれの検知セクタAT,AW,BT,BWでの感度は本来人間Hを検出するのに必要十分な感度に設定されるべきであり、感度が高すぎると小動物Mによる誤作動のリスクが大きくなるからである。感度を調整するには、例えば、図9及び図10に示すようにすればよい。図9は、本発明に係る第3の実施例の人体検知センサの光学ユニットを示す説明図である。図10は、同人体検知センサの光学ユニットの他の例を示す説明図である。
【0052】
図9では、近距離用光学系B26の光軸上に、入光する光の一部を遮断する感度調整板100を備えている。この感度調整板100は、近距離用光学系B26に入光する光を遮断する遮断量を増減可能である。図9(a)は、検知セクタBWでの警戒距離が遠く、ギャップを小さくする場合の図である。図9(a)では、検知セクタBWを構成するための光路が感度調整板100にかからないため、放物面鏡である近距離用光学系B26の全面で熱線を受光する。これに対し、図9(b)は、検知セクタBWでの警戒距離が短く、ギャップを大きくする場合の図である。ギャップを大きくするため、図9(a)の場合とは近距離用光学系B26の向きを変えることで検出軸の向きを変えている。このとき、感度調整板100によって光路が遮られるため、近距離用光学系B26の一部でしか熱線を受光しない。結果として、図9(a)のときに比べて、焦電素子B22が受光する熱線のエネルギーは小さくなり、感度調整板100により近距離用光学系B26光学系に入光する光量が変わることで、焦電素子B22の感度が調整されることになる。
【0053】
尚、図9は、近距離用光学系B26に放物面鏡を用いた場合であるが、図10は、フレネルレンズである近距離用光学系B76を使用したときの図である。図10では、近距離用光学系B76の光軸上に、入光する光の一部を遮断する感度調整板102を備えている。この感度調整板102は、近距離用光学系B76に入光する光を遮断する遮断量を増減可能である。ギャップを変更するため図10(a)と図10(b)とでは、近距離用光学系B76の位置を変えている。放物面鏡の場合と同様に、感度調整板102によって光路が遮られるため、焦電素子B22が受光する熱線のエネルギーは小さくなり、感度調整板102により近距離用光学系B76に入光する光量が変わることで、焦電素子B22の感度が調整されることになる。
【0054】
以上のように、感度調整板100,102により光学系に入光する光量が変わることで、焦電素子B22の感度が調整され、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間Hを検知し且つ小動物Mを検知しない理想的な設定を得ることができる。
【0055】
さらに、感度調整板100,102が遮断する光の遮断量を、光学系の仰角に応じて変化させることで、光学系の状態を設定するのみで容易に焦電素子B22の感度を調整することができる。尚、本実施例では、感度調整板100,102を固定し、近距離用光学系B26及び近距離用光学系B76の角度や位置を変えることにより、感度調整板100,102の遮断量を変化させているが、このような構造に限られるものではなく、感度調整板100,102を移動させたり、近距離用光学系B26や近距離用光学系B76と感度調整板100,102の双方を移動させるようにして調整してもよい。
【0056】
尚、上記実施例1〜実施例3では光学系ごとに1つの焦電素子A12と焦電素子B22を用いているが、焦電素子の数は、各1つに限られるものではなく、検知セクタAT,AW,BT,BW毎に別々のものを用いることも可能で、各焦電素子からの出力を合成し、信号処理回路A30や信号処理回路B40に送るようにしてもよく、その構成により限定されるものではない。
【産業上の利用可能性】
【0057】
以上のように、本発明によれば、1台で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる人体検知センサを提供することができる。
【符号の説明】
【0058】
1・・・・・人体検知センサ
2・・・・・人体検知センサ
10・・・・光学ユニットA
11・・・・光学ユニットA
12・・・・焦電素子A
14・・・・光学系A
14a・・・遠距離用光学系A
14b・・・近距離用光学系A
16・・・・遠距離用光学系A
18・・・・近距離用光学系A
20・・・・光学ユニットB
22・・・・焦電素子B
24・・・・遠距離用光学系B
26・・・・近距離用光学系B
30・・・・信号処理回路A
32・・・・増幅回路
34・・・・帯域フィルタ
36・・・・比較回路
40・・・・信号処理回路B
42・・・・増幅回路
44・・・・帯域フィルタ
46・・・・比較回路
50・・・・判定手段
64・・・・光学系A
64a・・・遠距離用光学系A
64b・・・近距離用光学系A
74・・・・遠距離用光学系B
76・・・・近距離用光学系B
84・・・・遠距離用光学系A
86・・・・近距離用光学系A
100・・・感度調整板
102・・・感度調整板
H・・・・・人間
M・・・・・小動物
AT・・・・検知セクタ
AW・・・・検知セクタ
BT・・・・検知セクタ
BW・・・・検知セクタ
F・・・・・床
L・・・・・天井
【技術分野】
【0001】
本発明は、人体から放射される熱線を検出し、検知領域内での人の存否を検知する人体検知センサに関する。
【背景技術】
【0002】
従来より、一般の家庭や店舗、工場等の警備対象施設側に、異常を検知するセンサを設け、異常の情報を警備端末を介して警備センタの警備用センタ装置に通報する警備システムが用いられている。そして、異常を検知するセンサとして、警備対象施設内への侵入を検知する人体検知センサがある。この人体検知センサは、人間から放射される熱線を検出し、警戒領域内での人間の存否を検知するものである。
【0003】
より具体的には、人体検知センサは、集光光学系によって、焦電素子等の熱線の波長領域に感度を有する赤外線検知素子を用いた赤外線検知器に入射する熱線の検知セクタを形成し、その検知セクタ内の物体から放射される熱線を赤外線検知器に集光するようにし、その赤外線検知器の出力に基づく検知セクタ内からの熱線のエネルギーの変動量が所定のレベルを越えたときに、検知セクタ内への人間等の移動物体の侵入を検知するように構成されており、自動ドアの開閉や、防犯警備システムにおいて侵入者の検知のために広く用いられている。
【0004】
しかし、人体検知センサに用いられる焦電素子である赤外線検知素子は、熱線を検知するものであるので、人間以外の熱線を放射する小動物による誤報が発生することもある。そこで、人体検知センサにおいては、人間だけを検知し、小動物による誤報を防止するための対策が種々提案されており、その一つとして、複数の検知セクタを構成し、その複数のエリアからの各信号のANDをとることによって、人間とその他の非検知対象物とを区別する方法が知られている。
【0005】
この人間とその他の非検知対象物とを区別する方法として、例えば特許文献1で示されるものがある。特許文献1では、焦電素子と光学系との組み合わせにより、一方の焦電素子の検出軸の上方又は下方にもう一方の光学ユニットの検知セクタ(特許文献1では「検知ゾーン」と記載)が設定されている。両方の検出軸は重ならないように(人体検知センサからの距離が同じにならないように)、適切な間隔(ギャップ)を確保して配置されている。そして、両方の検知セクタからのANDをとることによって小動物による誤報を低減している。このとき検出軸のギャップの大きさにより、小動物非検知性能が決まる。更に、検出軸を下に向けるのにともない、ギャップである上段の検出軸と下段の検出軸との間隔が大きくなる。これは、「検出軸を下に向ける」=「最長警戒距離を短くする」のであれば有効である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−213673号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、しかし、この種類の人体検知センサが取り付けられる環境は様々であり、最長警戒距離の長さ以外に、天井の高さなど取り付け高さも状況により異なることになる。人体検知センサが警戒する距離は1つではなく、人体検知センサから近い距離も遠い距離も1台の人体検知センサで警戒する場合が多いのが現状である。1つの光学系は複数の放物面鏡やフレネルレンズ等で構成されており、それぞれが警戒領域内の個々の検知セクタを形成する役割を担っている。そして、ギャップの最適な設定は、人体検知センサから各検知セクタまでの距離により異なる。なぜなら、人体検知センサから見た人間や小動物の大きさは、この距離によって変わるからである。
【0008】
一般に、人体検知センサから近距離の検知セクタについては、人体検知センサから検知セクタ(検知面)までの距離は、人体検知センサの取り付け高さに大きく影響される。また、検知セクタを人体検知センサから遠距離の位置で考えると、人体検知センサから検知セクタまでの距離は警戒距離(水平距離)に影響される。検知セクタを人体検知センサから近距離の位置で考えると、取り付け高さによって最適なギャップに設定することが望ましく、遠距離の検知セクタについては、警戒距離によって最適なギャップに設定することが望ましい。しかし、従来の人体検知センサでは、警戒距離によってギャップを変更しているものの、取り付け高さについては対応していない。
【0009】
従来の人体検知センサでは、2つの焦電素子により形成される検知セクタ間のギャップを制御する手段として、2つの方式が紹介されている。特許文献1では、1本の検出軸についての記述しかないが、実際には、遠距離も近距離も1台の人体検知センサで警戒する場合が多い。デュアルツインセンサの間隔を変更する方式では、遠距離のギャップを大きくすると、近距離のギャップも同じように大きくなってしまう。また、光学ユニットを2個使用する方式では、光軸の向きは光学ユニットの回転により制御され、それらの光学系はいずれも一つで構成されており、この方式でも遠距離と近距離のギャップを独立して制御することができない(遠距離と近距離の検知セクタの向きを独立して制御することができない)。従って、いずれの方式でも、遠距離と近距離のギャップをそれぞれ最適な大きさに制御することはできない。
【0010】
尚、ここで、遠距離及び近距離とは、人体検知センサからの絶対的な距離により定められるものではなく、遠い側と近い側といった相対的な位置関係を示すものである。人体検知センサで遠距離及び近距離を捉えた場合には、例えば、その人体検知センサが警戒可能な最長距離のおよそ半分の距離を基準に、それより長い距離を遠距離、それより短い距離を近距離と考えることができるが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【0011】
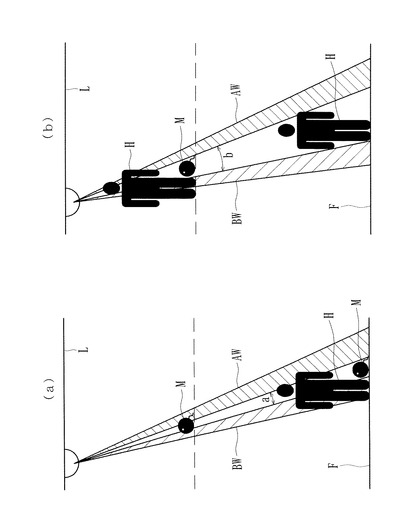
まず、近距離の検知セクタに着目して考える。従来の人体検知センサでは、人体検知センサの取り付け高さの変更に対応していないため、ある特定の高さに合わせてギャップを設定する。例えば、図11(a)に示すように、近距離の検知セクタAW,BWの光学系を取り付け高さが高い場合に合わせて設定した場合、その設定のままで低い位置に取り付けるとギャップaが小さくなり、小動物Mにより誤報が発生する可能性が高くなる。逆に、図11(b)に示すように、近距離の検知セクタAW,BWの光学系を取り付け高さが低い場合に合わせて設定した場合、その設定のまま高い位置に取り付けるとギャップbが大きくなり、人間Hを失報する(検知されなければならないときに検知されない)可能性が高くなる。
【0012】
従来の人体検知センサでは、このギャップを「検出軸を下に向ける」ことで大きくするが、検出軸を下に向けることと取り付け高さが低いことは、機能上意味が一致しない。取り付け高さを高くするときにも、検出軸を下に向ける必要があるわけで、従って、取り付け高さが高い場合にも低い場合にも人間と小動物との両方を精度良く識別し誤報を抑えることができない。
【0013】
同様の理由から、遠距離の検知セクタの光学系を最長警戒距離が短い場合に合わせて設計した場合、最長警戒距離が長い条件ではギャップが大きくなり、人間を失報する可能性が高くなる。逆に、最長警戒距離が長い場合に合わせて設計した場合、最長警戒距離が短い条件ではギャップが小さくなり、小動物により誤報が発生する可能性が高くなる。
【0014】
本発明は、このような事情に鑑みてなされたもので、1台で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる人体検知センサを提供することにある。
【課題を解決するための手段】
【0015】
請求項1記載の人体検知センサは、第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成し、第2の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする。
【0016】
請求項2記載の人体検知センサは、第1の光学ユニットの光学系が、垂直方向に揺動することを特徴とする。
【0017】
請求項3記載の人体検知センサは、第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠近それぞれの検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする。
【0018】
請求項4記載の人体検知センサは、第1の光学ユニットの光学系の遠距離用の検知セクタと第2の光学ユニットの光学系の遠距離用の検知セクタとの仰角のギャップが、任意に設定可能であり、第1の光学ユニットの光学系の近距離用の検知セクタと第2の光学ユニットの光学系の近距離用の検知セクタとの仰角のギャップが、任意に設定可能であることを特徴とする。
【0019】
請求項5記載の人体検知センサは、第1の光学ユニットの光学系又は第2の光学ユニットの光学系のそれぞれの光軸上に設けられ、それぞれに入光する光の一部を遮断する感度調整板を備え、感度調整板が遮断する遮断量を増減可能で、感度調整板により光学系に入光する光量が変わることで、焦電素子の感度が調整されることを特徴とする。
【0020】
請求項6記載の人体検知センサは、感度調整板が遮断する光の遮断量を、光学系の仰角に応じて変化させることが可能なことを特徴とする。
【発明の効果】
【0021】
請求項1〜請求項4の発明によれば、第1の光学ユニットの検知セクタ及び第2の光学ユニットの検知セクタの角度の関係を適宜設定可能で、1台の人体検知センサで、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる。
【0022】
請求項5の発明によれば、感度調整板により光学系に入光する光量が変わることで、焦電素子の感度が調整され、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な設定を得ることができる。
【0023】
請求項6の発明によれば、感度調整板が遮断する光の遮断量を、光学系の仰角に応じて変化させることが可能なことから、光学系の状態を設定するのみで容易に焦電素子の感度を調整することができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る第1の実施例の人体検知センサを示す構成図である。
【図2】同人体検知センサの光学ユニットの構造を示す説明図である。
【図3】同人体検知センサの動作を示す説明図である。
【図4】同人体検知センサの動作を示す説明図である。
【図5】同人体検知センサの他の光学ユニットの構造を示す説明図である。
【図6】本発明に係る第2の実施例の人体検知センサを示す構成図である。
【図7】同人体検知センサの光学ユニットの構造を示す説明図である。
【図8】同人体検知センサの他の光学ユニットの構造を示す説明図である。
【図9】本発明に係る第3の実施例の人体検知センサの光学ユニットを示す説明図である。
【図10】同人体検知センサの光学ユニットの他の例を示す説明図である。
【図11】従来の人体検知センサの動作を示す説明図である。
【発明を実施するための形態】
【0025】
本発明の形態における人体検知センサは、人体から放射される熱線を検出し、検知領域内での人間の存否を検知するものである。尚、以下で、遠距離及び短距離の語が用いられているが、遠距離及び近距離とは、人体検知センサからの絶対的な距離により定められるものではなく、遠い側と近い側といった相対的な位置関係を示すものである。人体検知センサで遠距離及び近距離を捉えた場合には、例えば、その人体検知センサが警戒可能な最長距離のおよそ半分の距離を基準に、それより長い距離を遠距離、それより短い距離を近距離と考えることができるが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【0026】
また、以下で、人体検知センサの取り付け高さとして、取り付け高さが高い及び取り付け高さが低いの語が用いられているが、高い低いとは、人体検知センサを取り付ける天井の高さの絶対的な数値により定められるものではなく、後述するギャップの大きさにより人間と小動物の検知に影響を及ぼす可能性のある相対的な位置関係を示すものである。人体検知センサで取り付け高さが高い及び取り付け高さが低いを捉えた場合には、例えば、人体検知センサの検知可能な最大距離との関係で決まる取り付け可能な最大の高さと、最小の高さのおよそ中間を基準に、それより高い場合には取り付け高さが高く、それより低い場合は取り付け高さが低いと考えることができるが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【実施例1】
【0027】
以下、本実施例を図面を参照しながら具体的に説明する。図1は、本発明に係る第1の実施例の人体検知センサを示す構成図である。図2は、同人体検知センサの光学ユニットの構造を示す説明図である。図3は、同人体検知センサの動作を示す説明図である。図4は、同人体検知センサの動作を示す説明図である。図5は、同人体検知センサの他の光学ユニットの構造を示す説明図である。
【0028】
図1〜図5における人体検知センサ1は、光学ユニットA10,光学ユニットB20と、信号処理回路A30,信号処理回路B40と、判定手段50とを備えている。光学ユニットA10及び光学ユニットB20は、人間Hの身体から放射される熱線を集光する光学系A14,遠距離用光学系B24及び近距離用光学系B26と、光学系A14,遠距離用光学系B24及び近距離用光学系B26に集光された熱線を検知する焦電素子A12,焦電素子B22をそれぞれ有している。
【0029】
焦電素子A12,焦電素子B22は、赤外線検知素子を2つ有するツイン型のものであるが、必ずしもツイン型のものである必要はなく、また、焦電素子でなくても人体を検知可能なものであれば、限られるものではない。尚、焦電素子A12,焦電素子B22にツイン型を用いることで、例えば、外乱光が、2つの赤外線検知素子の両方に入射した場合であっても、赤外線検知素子の出力は互いに相殺されるため、外乱光等の背景雑音に強く、外乱光による誤報を抑えることができる。
【0030】
光学系A14、遠距離用光学系B24及び近距離用光学系B26は、人間Hの身体から放射される熱線を焦電素子A12,焦電素子B22に集光し、後述する焦電素子A12,焦電素子B22の検知セクタの配置を形成させるものである。光学系A14は、放物面鏡が上下二段で構成され、下段が遠距離用光学系A14aであり、上段が近距離用光学系A14bである。そして、遠距離用光学系A14aが遠距離用の検知セクタATを形成し、近距離用光学系A14bが近距離用の検知セクタAWを形成する。光学系A14は、焦電素子A12に対し垂直方向に揺動し、それにより、検知セクタAT,AWが、垂直方向に揺動することになる。尚、本実施例では、光学系A14のみが揺動する構造になっているが、焦電素子A12を含め光学ユニットA10全体が垂直方向に揺動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。
【0031】
尚、ここで、遠距離用及び近距離用とあるが、まず、異なる距離の検知セクタAT,AWを構成させるために2つの名称を用いているのが前提である。その上で、遠距離用及び近距離用とは、人体検知センサ1から検知セクタAT,AWの伸びる距離を絶対的な数値により定められるものではなく、遠い側と近い側といった相対的な位置関係を示すものである。例えば、人体センサ1が取り付けられている状態で、その警戒している最も遠い距離のおよそ半分を基準に、それより長い距離を警戒する検知セクタATを構成する下段の光学系を遠距離用光学系A14aとし、それより短い距離を警戒する検知セクタAWを構成する上段の光学系を近距離用光学系A14bとするが、これはあくまでも説明上の目安にしか過ぎず、これに限られるものではない。
【0032】
一方、光学ユニットB20では、光学ユニットA10とは異なり、遠距離用光学系B24及び近距離用光学系B26の2つの光学系を備えている。遠距離用光学系B24及び近距離用光学系B26は、それぞれが放物面鏡で上下二段に配置されている。そして、遠距離用光学系B24が遠距離用の検知セクタBTを形成し、近距離用光学系B26が近距離用の検知セクタBWを形成する。遠距離用光学系B24及び近距離用光学系B26は、焦電素子B22に対しそれぞれ独立して垂直方向に揺動し、それにより、検知セクタBT,BWが、垂直方向に揺動することになる。尚、本実施例では、遠距離用光学系B24及び近距離用光学系B26がそれぞれ揺動する構造になっているが、遠距離用光学系B24及び近距離用光学系B26がそれぞれ揺動する構造のまま、焦電素子B22を含め光学ユニットB20全体が垂直方向に揺動することにより、検知セクタBT,BWが、垂直方向に揺動するようにしてもよい。
【0033】
そして、光学ユニットA10と光学ユニットB20とは、図2に示すように、上下にずらして配置されており、遠距離用の検知セクタATと検知セクタBT、及び近距離用の検知セクタAWと検知セクタBWとが、それぞれ交差せず且つ所定のギャップa,bを備えるように配置されている。
【0034】
信号処理回路A30,信号処理回路B40は、増幅回路32,42と、帯域フィルタ34,44と、比較回路36,46とから構成されている。増幅回路32,42は、焦電素子A12,焦電素子B22の出力を増幅する。帯域フィルタ34,44は、増幅回路32,42の出力から不要な周波数成分を除いて所定の周波数成分の信号のみを出力する。比較回路36,46は、帯域フィルタ34,44を通った信号を所定の閾値と比較して、閾値以上の信号があった場合にパルス信号を出力する。判定手段50は、信号処理回路A30,信号処理回路B40からの2つのパルス信号のANDから被検知物体である人間Hを検知したと判断し、検知信号を出力するものである。
【0035】
本実施例の人体検知センサ1は、二つの光学ユニットA10と光学ユニットB20のうち一方の光学系を遠距離用、近距離用の二つに分割し、人体検知センサ1の取り付け高さや最長警戒距離に応じて遠距離、近距離のギャップをそれぞれ調整可能とするものである。こうすることで、例えば最長警戒距離が長くて取り付け高さが低いときには、遠距離のギャップ(図3のギャップa)を小さくしながら近距離のギャップ(図4のギャップb)を大きくすることができる。また、例えば、最長警戒距離が短くて取り付け高さが高いときには、遠距離のギャップ(図3のギャップa)を大きくしながら近距離のギャップ(図4のギャップb)を小さくすることができる。
【0036】
より具体的には、例えば、「最長警戒距離が短い場合」と「最長警戒距離が長い場合」を比較すると、人体検知センサ1からみた人間Hと小動物Mの大きさは、人体検知センサからの距離が大きくなるほど小さくなる(図3参照)。まず、比較的長距離を警戒する場合を考える(図3(a))。このとき、人体検知センサ1から見た小動物は十分に小さいので、ギャップaは大きくする必要がない。このギャップaを大きく設定してしまうと、逆に人間Hを検知しない可能性が高くなってしまう。比較的短距離を警戒する場合(図3(b))は、人体検知センサ1から見た小動物Mは十分に小さいとはいえないため、最長警戒距離が長い場合に比べてギャップa’を大きく設定しなければ小動物Mによる誤報の可能性が高くなる。ギャップa’を大きく設定しても、この距離では人体検知センサ1から見た人間Hは十分に大きいため、失報の可能性は小さい。このように、遠距離を警戒する検知セクタAT,BTの最適なギャップaは最長警戒距離によって異なるが、本実施例の人体検知センサ1では、遠距離用光学系B24の仰角を独立して可変することにより、警戒距離に応じて最適なギャップaに調整することが可能になる。
【0037】
次に、「取り付け高さが低い場合」と「取り付け高さが高い場合」を比較する。取り付け高さを変えた場合、図4に示すように、人体検知センサ1から近距離の検知セクタAW,BWに関しては、人体検知センサ1から人間H及び小動物Mまでの距離が、この高さの影響を大きく受ける。まず、比較的高い位置に取り付ける場合を考えると、図4(a)に示すように、人体検知センサ1から見た小動物Mは十分に小さいので、ギャップbは大きくする必要がない。このギャップbを大きく設定してしまうと、逆に人間Hを検知しない可能性が高くなってしまう。図4(b)に示すように、比較的低い位置に取り付ける場合は、人体検知センサ1から見た小動物Mは十分に小さいとはいえないため、高い位置に取り付ける場合に比べてギャップb’を大きく設定しなければ小動物Mによる誤報の可能性が高くなる。ギャップb’を大きく設定しても、この距離では人体検知センサ1から見た人間Hは十分に大きいため、失報の可能性は小さい。このように、近距離を警戒する検知セクタAW,BWの最適なギャップbは、取り付け高さによって異なるが、本実施例の人体検知センサ1では、近距離用光学系B26の仰角を独立して可変することにより、警戒距離に応じて最適なギャップbに調整することが可能になる。
【0038】
実際には、取り付け高さが高くて警戒距離が短い場合や、取り付け高さが低くて警戒距離が長い場合等、様々な取り付け状況があるが、本実施例の人体検知センサ1では、いずれの状況にも対応可能である。このように、第1の光学ユニットA10の光学系A14の遠距離用の検知セクタATと第2の光学ユニットB20の遠距離用光学系B24の遠距離用の検知セクタBTとの仰角のギャップaを任意に設定可能であり、さらに、第1の光学ユニットA10の光学系A14の近距離用の検知セクタAWと第2の光学ユニットB20の近距離用光学系B26の近距離用の検知セクタBWとの仰角のギャップbを任意に設定可能であり、1台の人体検知センサ1で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間Hを検知し且つ小動物Mを検知しない理想的な検知セクタの配置を得ることができる。尚、光学ユニットA10と光学ユニットB20とを、独立してそれぞれ揺動するようにしてもよいし、一方の光学ユニットを揺動させるとそれに連動して他方の光学ユニットが揺動するような構造にしてもよく、各光学系のどれとどれを連動させるか又はさせないかは、任意である。
【0039】
尚、図2に示す人体検知センサ1の光学ユニットA10と光学ユニットB20が、放物面鏡を使用した場合であるが、放物面鏡に限られるものではなく、例えば図5に示すように、光学系A64や遠距離用光学系B74及び近距離用光学系B76として、レンズ(例えばフレネルレンズ)を用いることも可能である。
【0040】
図5の場合、2つの光学ユニットを完全に上下に配置し、上方の光学ユニットは、光学ユニットA10と同様に、光学系A64の1つであり、その光学系A64の上段が遠距離用の検知セクタATを形成する遠距離用光学系A64aで、下段が近距離用の検知セクタAWを形成する近距離用光学系A64bである。また、下方の光学ユニットは、光学ユニットB20と同様に、遠距離用光学系B74と近距離用光学系B76の2つに分割されており、上段が遠距離用の検知セクタBTを形成する遠距離用光学系B74で、下段が近距離用の検知セクタBWを形成する近距離用光学系B76である。
【0041】
図5の光学系A64は、それが上下に移動し、焦電素子A12に入射する角度が変わり、結果として検知セクタAT,AWの仰角を可変させることができる。また、遠距離用光学系B74と近距離用光学系B76とは、それぞれに独立して上下に移動し、焦電素子B22に入射する角度が変わり、結果として検知セクタBT,BWの仰角を可変させることができる。このように、光学系A64、遠距離用光学系B74及び近距離用光学系B76を上下に移動することで、遠距離用の検知セクタATと検知セクタBTとのギャップa及び近距離用の検知セクタAWと検知セクタBWとのギャップbを、それぞれ任意に設定することができる。
【0042】
尚、図5では、光学系A64のみが上下動する構造になっているが、焦電素子A12を含め光学ユニット全体が上下動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。また、遠距離用光学系B74及び近距離用光学系B76がそれぞれ上下動する構造になっているが、遠距離用光学系B74及び近距離用光学系B76がそれぞれ上下動する構造のまま、焦電素子B22を含め光学ユニット全体が上下動することにより、検知セクタBT,BWが、垂直方向に揺動するようにしてもよい。
【実施例2】
【0043】
実施例1では、第1の光学ユニットである光学ユニットA10の光学系A14は、遠距離用と近距離用とで分割されていなかったが、実施例1の第2の光学ユニットB20と同様に光学系を遠距離用及び近距離用の二つに分割し、取り付け高さや最長警戒距離に応じて近距離及び遠距離のギャップをそれぞれ調整可能とするようにしてもよい。本実施例では、その光学系を分割した場合を説明する。図6は、本発明に係る第2の実施例の人体検知センサを示す構成図である。図7は、同人体検知センサの光学ユニットの構造を示す説明図である。図8は、同人体検知センサの他の光学ユニットの構造を示す説明図である。
【0044】
図6〜図7における人体検知センサ2は、光学ユニットA11,光学ユニットB20と、信号処理回路A30,信号処理回路B40と、判定手段50とを備えている。本実施例の人体検知センサ2は、光学ユニットB20、信号処理回路A30及び信号処理回路B40が、実施例1のものと同様であり、説明を省略する。
【0045】
一方、本実施例における光学ユニットA11は、光学ユニットB20と同様に、遠距離用光学系A16及び近距離用光学系A18の2つの光学系を備えている。遠距離用光学系A16及び近距離用光学系A18は、それぞれが放物面鏡で上下二段に配置されている。そして、遠距離用光学系A16が遠距離用の検知セクタATを形成し、近距離用光学系A18が近距離用の検知セクタAWを形成する。遠距離用光学系A16及び近距離用光学系A18は、焦電素子A12に対しそれぞれ独立して垂直方向に揺動し、それにより、検知セクタAT,AWが、垂直方向に揺動することになる。尚、本実施例では、遠距離用光学系A16及び近距離用光学系A18がそれぞれ揺動する構造になっているが、遠距離用光学系A16及び近距離用光学系A18がそれぞれ揺動する構造のまま、焦電素子A12を含め光学ユニットA11全体が垂直方向に揺動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。
【0046】
そして、実施例1と同様に、光学ユニットA11と光学ユニットB20とは、図7に示すように、上下にずらして配置されており、遠距離用の検知セクタATと検知セクタBT、及び近距離用の検知セクタAWと検知セクタBWとが、それぞれ交差せず且つ所定のギャップa,bを備えるように配置されている。
【0047】
このような構造の人体検知センサ2によれば、実施例1の人体検知センサ1と同様に、取り付け高さが高くて警戒距離が短い場合や、取り付け高さが低くて警戒距離が長い場合等、様々な取り付け状況があるが、いずれの状況にも対応可能である。このように、第1の光学ユニットA11の遠距離用光学系A16の遠距離用の検知セクタATと第2の光学ユニットB20の遠距離用光学系B24の遠距離用の検知セクタBTとの仰角のギャップaを任意に設定可能であり、さらに、第1の光学ユニットA11の近距離用光学系A18の近距離用の検知セクタAWと第2の光学ユニットB20の近距離用光学系B26の近距離用の検知セクタBWとの仰角のギャップbを任意に設定可能であり、1台の人体検知センサ2で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間Hを検知し且つ小動物Mを検知しない理想的な検知セクタの配置を得ることができる。
【0048】
尚、図7に示す人体検知センサ2の光学ユニットA11と光学ユニットB20が、放物面鏡を使用した場合であるが、実施例1と同様に、放物面鏡に限られるものではなく、例えば図8に示すように、遠距離用光学系A84、近距離用光学系A86、遠距離用光学系B74及び近距離用光学系B76として、レンズ(例えばフレネルレンズ)を用いることも可能である。2つの光学系の配置は、実施例1の図5と同様だが、焦電素子A12に係る光学系の構造が異なり、焦電素子B22に係る光学系は図5と同様である。
【0049】
図8の形態では、上方の光学ユニットも下方の光学系と同様に、遠距離用光学系A84と近距離用光学系A86の2つに分割されており、上段が遠距離用の検知セクタATを形成する遠距離用光学系A84で、下段が近距離用の検知セクタBWを形成する近距離用光学系A86である。そして、遠距離用光学系A84と近距離用光学系A86とは、それぞれに独立して上下に移動し、焦電素子A12に入射する角度が変わり、結果として検知セクタAT,AWの仰角を可変させることができる。このように、遠距離用光学系A84、近距離用光学系A86、遠距離用光学系B74及び近距離用光学系B76を上下に移動することで、遠距離用の検知セクタATと検知セクタBTとのギャップa及び近距離用の検知セクタAWと検知セクタBWとのギャップbを、それぞれ任意に設定することができる。
【0050】
尚、図8では、遠距離用光学系A84及び近距離用光学系A86がそれぞれ上下動する構造になっているが、遠距離用光学系A84及び近距離用光学系A86がそれぞれ上下動する構造のまま、焦電素子A12を含め光学ユニット全体が上下動することにより、検知セクタAT,AWが、垂直方向に揺動するようにしてもよい。
【実施例3】
【0051】
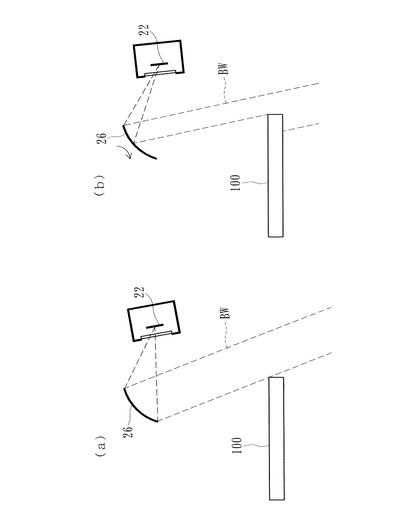
尚、人体検知センサ1,2から検知セクタAT,AW,BT,BWで検知する人体H又は小動物Mまでの距離によって出力される信号の大きさが変わる場合には、光学系の調整機構によってその感度を調整することが可能である。仮に、人体検知センサ1,2から検知セクタAW,BWで検知する人体H又は小動物Mまでの距離が近いほど信号が大きくなるのであれば、その感度が小さくなるよう感度を調整するのが望ましい。なぜなら、それぞれの検知セクタAT,AW,BT,BWでの感度は本来人間Hを検出するのに必要十分な感度に設定されるべきであり、感度が高すぎると小動物Mによる誤作動のリスクが大きくなるからである。感度を調整するには、例えば、図9及び図10に示すようにすればよい。図9は、本発明に係る第3の実施例の人体検知センサの光学ユニットを示す説明図である。図10は、同人体検知センサの光学ユニットの他の例を示す説明図である。
【0052】
図9では、近距離用光学系B26の光軸上に、入光する光の一部を遮断する感度調整板100を備えている。この感度調整板100は、近距離用光学系B26に入光する光を遮断する遮断量を増減可能である。図9(a)は、検知セクタBWでの警戒距離が遠く、ギャップを小さくする場合の図である。図9(a)では、検知セクタBWを構成するための光路が感度調整板100にかからないため、放物面鏡である近距離用光学系B26の全面で熱線を受光する。これに対し、図9(b)は、検知セクタBWでの警戒距離が短く、ギャップを大きくする場合の図である。ギャップを大きくするため、図9(a)の場合とは近距離用光学系B26の向きを変えることで検出軸の向きを変えている。このとき、感度調整板100によって光路が遮られるため、近距離用光学系B26の一部でしか熱線を受光しない。結果として、図9(a)のときに比べて、焦電素子B22が受光する熱線のエネルギーは小さくなり、感度調整板100により近距離用光学系B26光学系に入光する光量が変わることで、焦電素子B22の感度が調整されることになる。
【0053】
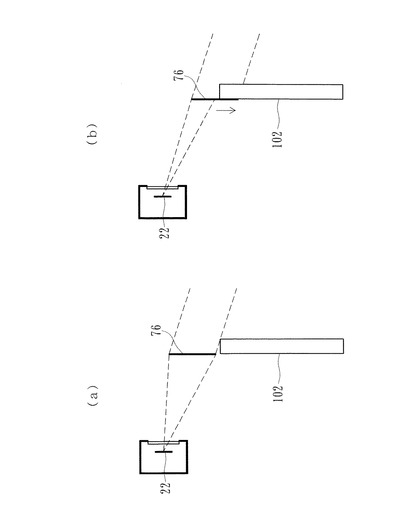
尚、図9は、近距離用光学系B26に放物面鏡を用いた場合であるが、図10は、フレネルレンズである近距離用光学系B76を使用したときの図である。図10では、近距離用光学系B76の光軸上に、入光する光の一部を遮断する感度調整板102を備えている。この感度調整板102は、近距離用光学系B76に入光する光を遮断する遮断量を増減可能である。ギャップを変更するため図10(a)と図10(b)とでは、近距離用光学系B76の位置を変えている。放物面鏡の場合と同様に、感度調整板102によって光路が遮られるため、焦電素子B22が受光する熱線のエネルギーは小さくなり、感度調整板102により近距離用光学系B76に入光する光量が変わることで、焦電素子B22の感度が調整されることになる。
【0054】
以上のように、感度調整板100,102により光学系に入光する光量が変わることで、焦電素子B22の感度が調整され、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間Hを検知し且つ小動物Mを検知しない理想的な設定を得ることができる。
【0055】
さらに、感度調整板100,102が遮断する光の遮断量を、光学系の仰角に応じて変化させることで、光学系の状態を設定するのみで容易に焦電素子B22の感度を調整することができる。尚、本実施例では、感度調整板100,102を固定し、近距離用光学系B26及び近距離用光学系B76の角度や位置を変えることにより、感度調整板100,102の遮断量を変化させているが、このような構造に限られるものではなく、感度調整板100,102を移動させたり、近距離用光学系B26や近距離用光学系B76と感度調整板100,102の双方を移動させるようにして調整してもよい。
【0056】
尚、上記実施例1〜実施例3では光学系ごとに1つの焦電素子A12と焦電素子B22を用いているが、焦電素子の数は、各1つに限られるものではなく、検知セクタAT,AW,BT,BW毎に別々のものを用いることも可能で、各焦電素子からの出力を合成し、信号処理回路A30や信号処理回路B40に送るようにしてもよく、その構成により限定されるものではない。
【産業上の利用可能性】
【0057】
以上のように、本発明によれば、1台で、取り付け高さ、最長警戒距離に影響されることなく、様々な取り付け環境において遠距離、近距離ともに人間を検知し且つ小動物を検知しない理想的な検知セクタの配置を得ることができる人体検知センサを提供することができる。
【符号の説明】
【0058】
1・・・・・人体検知センサ
2・・・・・人体検知センサ
10・・・・光学ユニットA
11・・・・光学ユニットA
12・・・・焦電素子A
14・・・・光学系A
14a・・・遠距離用光学系A
14b・・・近距離用光学系A
16・・・・遠距離用光学系A
18・・・・近距離用光学系A
20・・・・光学ユニットB
22・・・・焦電素子B
24・・・・遠距離用光学系B
26・・・・近距離用光学系B
30・・・・信号処理回路A
32・・・・増幅回路
34・・・・帯域フィルタ
36・・・・比較回路
40・・・・信号処理回路B
42・・・・増幅回路
44・・・・帯域フィルタ
46・・・・比較回路
50・・・・判定手段
64・・・・光学系A
64a・・・遠距離用光学系A
64b・・・近距離用光学系A
74・・・・遠距離用光学系B
76・・・・近距離用光学系B
84・・・・遠距離用光学系A
86・・・・近距離用光学系A
100・・・感度調整板
102・・・感度調整板
H・・・・・人間
M・・・・・小動物
AT・・・・検知セクタ
AW・・・・検知セクタ
BT・・・・検知セクタ
BW・・・・検知セクタ
F・・・・・床
L・・・・・天井
【特許請求の範囲】
【請求項1】
焦電素子と焦電素子に集光する光学系とを有する光学ユニットを備える人体検知センサにおいて、
第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成し、
第2の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、該遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする人体検知センサ。
【請求項2】
前記第1の光学ユニットの光学系が、垂直方向に揺動することを特徴とする請求項1記載の人体検知センサ。
【請求項3】
前記第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠近それぞれの検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、該遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする請求項1記載の人体検知センサ。
【請求項4】
前記第1の光学ユニットの光学系の遠距離用の検知セクタと前記第2の光学ユニットの光学系の遠距離用の検知セクタとの仰角のギャップが、任意に設定可能であり、
前記第1の光学ユニットの光学系の近距離用の検知セクタと前記第2の光学ユニットの光学系の近距離用の検知セクタとの仰角のギャップが、任意に設定可能であることを特徴とする請求項1〜請求項3のいずれかに記載の人体検知センサ。
【請求項5】
前記第1の光学ユニットの光学系又は前記第2の光学ユニットの光学系のそれぞれの光軸上に設けられ、それぞれに入光する光の一部を遮断する感度調整板を備え、
該感度調整板が遮断する遮断量を増減可能で、該感度調整板により該光学系に入光する光量が変わることで、前記焦電素子の感度が調整されることを特徴とする請求項1〜請求項4のいずれかに記載の人体検知センサ。
【請求項6】
前記感度調整板が遮断する光の遮断量を、前記光学系の仰角に応じて変化させることが可能なことを特徴とする請求項5記載の人体検知センサ。
【請求項1】
焦電素子と焦電素子に集光する光学系とを有する光学ユニットを備える人体検知センサにおいて、
第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成し、
第2の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠距離用と近距離用の検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、該遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする人体検知センサ。
【請求項2】
前記第1の光学ユニットの光学系が、垂直方向に揺動することを特徴とする請求項1記載の人体検知センサ。
【請求項3】
前記第1の光学ユニットの光学系が、当該人体検知センサからの水平方向で遠近それぞれの検知セクタを形成する遠距離用光学系と近距離用光学系とからなり、該遠距離用光学系と近距離用光学系とが、互いに独立して垂直方向に揺動することを特徴とする請求項1記載の人体検知センサ。
【請求項4】
前記第1の光学ユニットの光学系の遠距離用の検知セクタと前記第2の光学ユニットの光学系の遠距離用の検知セクタとの仰角のギャップが、任意に設定可能であり、
前記第1の光学ユニットの光学系の近距離用の検知セクタと前記第2の光学ユニットの光学系の近距離用の検知セクタとの仰角のギャップが、任意に設定可能であることを特徴とする請求項1〜請求項3のいずれかに記載の人体検知センサ。
【請求項5】
前記第1の光学ユニットの光学系又は前記第2の光学ユニットの光学系のそれぞれの光軸上に設けられ、それぞれに入光する光の一部を遮断する感度調整板を備え、
該感度調整板が遮断する遮断量を増減可能で、該感度調整板により該光学系に入光する光量が変わることで、前記焦電素子の感度が調整されることを特徴とする請求項1〜請求項4のいずれかに記載の人体検知センサ。
【請求項6】
前記感度調整板が遮断する光の遮断量を、前記光学系の仰角に応じて変化させることが可能なことを特徴とする請求項5記載の人体検知センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−247726(P2011−247726A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−120670(P2010−120670)
【出願日】平成22年5月26日(2010.5.26)
【出願人】(000101400)アツミ電氣株式会社 (69)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月26日(2010.5.26)
【出願人】(000101400)アツミ電氣株式会社 (69)
【Fターム(参考)】
[ Back to top ]