
人体模型、衣服圧測定装置および衣服圧測定方法
【課題】人体に近い衣服圧測定を行える人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法を提供する。
【解決手段】骨格部50と、骨格部50を取り包んで設けられた弾性部材42と、弾性部材42の表面の一部に配置され、弾性部材42よりも変形量の大きい弾性部材44と、弾性部材42の内部に配置され、弾性部材42よりも硬い弾性部材46と、を有する弾性部を備える。
【解決手段】骨格部50と、骨格部50を取り包んで設けられた弾性部材42と、弾性部材42の表面の一部に配置され、弾性部材42よりも変形量の大きい弾性部材44と、弾性部材42の内部に配置され、弾性部材42よりも硬い弾性部材46と、を有する弾性部を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は人体模型、衣服圧測定装置および衣服圧測定方法に関し、特に、衣服圧測定用の人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法に関する。
【背景技術】
【0002】
衣服の圧的快適性について評価を行う技術としては、衣服圧の測定が一般的である。従来の衣服圧の測定方法には、直接測定する方法と、布地の変化量から推定する方法がある。前者には、(1)人体各部位にセンサを取り付けて人体を用いて測定する方法と,(2)人体模型(以下、ダミーと称する)等へセンサを取り付けて測定する方法があり、後者には、コンピュータシミュレーションで測定値を確認する方法がある。
【0003】
衣服はヒトが着用して初めてその効果を発揮するものであるため,(1)の方法で人体を用いて測定することが望ましいが,被験者や測定者の拘束時間が長く精神的,肉体的負担が大きく、また個人差,日間誤差が大きい等の、被験者実験での各種の問題点が伴う。またコンピュータシミュレーションはデータ作成が困難であり実際的とはいえない。そこで,製品開発や品質管理の現場では二つ目の、ダミーを用いる方法が多く用いられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−70806号公報
【特許文献2】特開2006−176930号公報
【特許文献3】特開2004−163127号公報
【特許文献4】特開昭55−96113号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
現在上記二つ目の方法で用いられているダミーの多くは,人体形状を模した剛体ダミーである。剛体ダミーでは,短時間で測定ができ,測定者への負担が少ないことが利点である。しかしながら、剛体ダミーで衣服圧を測定した場合,人体での測定値とは大きな差がある。
【0006】
また、剛体ダミーではなく、弾性部材を使用したダミーも提案されている(特許文献1〜4参照)が、人体に近い衣服圧測定を行えるダミーではない。
【0007】
従って、本発明の主な目的は、人体に近い衣服圧測定を行える人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明の一態様によれば、
骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、
を備える人体模型が提供される。
【0009】
好ましくは、前記人体模型は、前記弾性部の表面に設けられた圧力センサをさらに備える。
【0010】
また、好ましくは、前記弾性部は、人体の硬さ分布に則して前記第1乃至第3の弾性部材が配置されている。
【0011】
また、好ましくは、前記骨格部は、関節部と、前記関節部の両側の第1および第2の骨格部材と、を有している。
【0012】
また、好ましくは、前記骨格部は、人体骨格標本である。
【0013】
また、好ましくは、前記人体模型は、前記人体骨格標本に取り付けられた自重垂れ防止セパレータをさらに備える。
【0014】
また、好ましくは、前記人体模型は、前記人体骨格標本に設けられた補強金具をさらに備える。
【0015】
また、好ましくは、前記人体模型は、前記人体骨格標本の関節部を補強する補強部材をさらに備える。
【0016】
また、好ましくは、前記骨格部は、腰部と、大腿部と、前記腰部と前記大腿部とをつなぐ関節部とを有し、前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている。
【0017】
また、好ましくは、前記第3の弾性部材は、横長の楕円柱形状である。
【0018】
また、本発明の他の態様によれば、
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサとを備える人体模型と、
前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置と、
前記駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するように、前記駆動装置および前記圧力センサを制御する制御手段と、
を備える衣服圧測定装置が提供される。
【0019】
好ましくは、前記衣服圧測定装置は表示手段をさらに備え、
前記制御部は、前記圧力測定データをデータ処理して、データ処理されたデータを前記表示手段に表示するように前記表示手段を制御する。
【0020】
また、好ましくは、前記駆動装置は、前記第2の骨格部材が前記間接部の回りに揺動する面と平行な面内で互いに直交する2方向にそれぞれ直線運動する直線運動機構を備える。
【0021】
また、好ましくは、前記第1の骨格部材は腰部であり、前記第2の骨格部材は大腿部であり、前記関節部は、前記腰部と前記大腿部とをつなぐ関節部である。
【0022】
また、好ましくは、前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている。
【0023】
また、好ましくは、前記衣服圧測定装置は入力手段をさらに備え、
前記制御部は、前記入力手段による制御データを受け付け、前記受け付けた制御データに基づいて前記駆動装置を駆動するように前記入力手段および前記駆動装置を制御する。
【0024】
また、好ましくは、前記制御データは、歩行速度である。
【0025】
また、本発明のさらに他の態様によれば、
コンピュータが、
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサと、を備え、衣服が着用された人体模型の、前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するステップを備える衣服圧測定方法が提供される。
【発明の効果】
【0026】
本発明によれば、人体に近い衣服圧測定を行える人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法が提供される。
【図面の簡単な説明】
【0027】
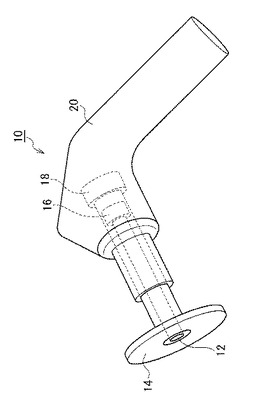
【図1】図1は、本発明の好ましい実施の形態で使用した組織硬度計を説明するための概略斜視図である。
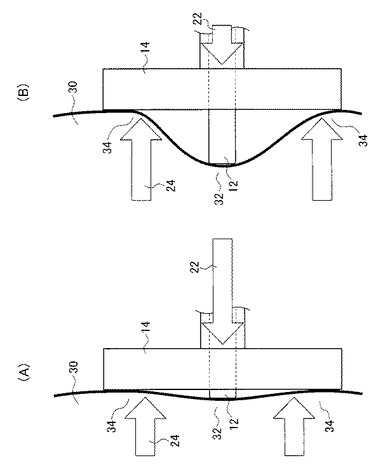
【図2】図2は、本発明の好ましい実施の形態で使用した組織硬度計で硬さを測定する方法を説明するための概略断面図である。
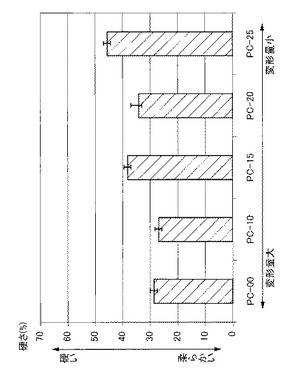
【図3】図3は、本発明の好ましい実施の形態で使用したウレタン樹脂の硬さ示す図である。
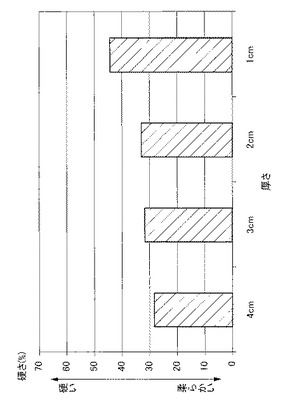
【図4】図4は、本発明の好ましい実施の形態で使用したウレタン樹脂の厚さを変えた時の硬さを示す図である。
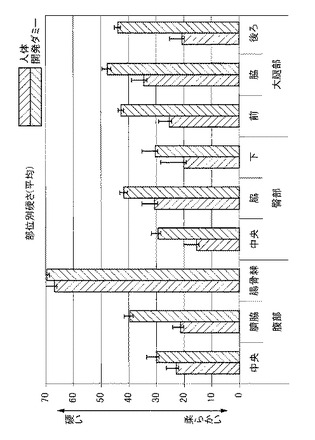
【図5】図5は、人体と、本発明の好ましい実施の形態のダミーとの硬さ分布を示す図である。
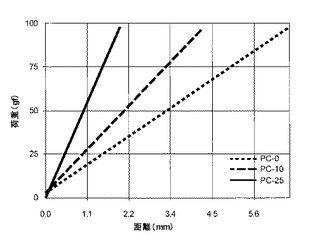
【図6】図6は、本発明の好ましい実施の形態で使用したウレタン樹脂の圧縮特性を示す図である。
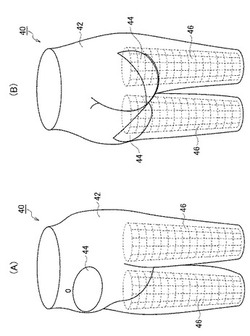
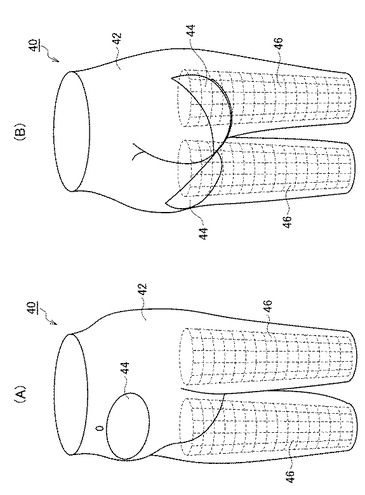
【図7】図7は、本発明の好ましい実施の形態のダミーの弾性部材の配置を説明するための概略立体図である。
【図8】図8は、本発明の好ましい実施の形態のダミーの骨格部を説明するための概略立体図である。
【図9】図9は、本発明の好ましい実施の形態のダミーへのセンサの取り付けを説明するための概略立体図である。
【図10】図10は、本発明の好ましい実施の形態の衣服圧測定装置を説明するための概略斜視図である。
【図11】図11は、本発明の好ましい実施の形態の衣服圧測定装置に好適に使用されるコントローラを説明するための概略構成図である。
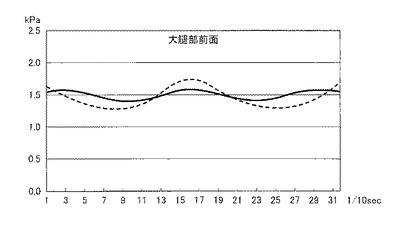
【図12】図12は、本発明の好ましい実施の形態の衣服圧測定装置で測定した大腿部前面の衣服圧測定結果を示す図である。
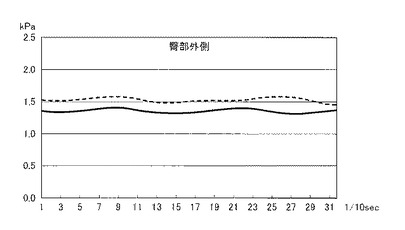
【図13】図13は、本発明の好ましい実施の形態の衣服圧測定装置で測定した臀部外側の衣服圧測定結果を示す図である。
【発明を実施するための形態】
【0028】
本発明者達は、人体に近い衣服圧測定を行える人体模型について、鋭意研究した結果、以下の知見を得た。
【0029】
剛体ダミーで衣服圧を測定した場合,人体での測定値とは大きな差があるのは、人体には柔らかい部位(主に脂肪の多い部位)と硬い部位(主に筋肉や骨格の部位)があり,柔らかい部位は衣服が人体へ馴染み、また関節部分は動作をするため衣服の食い込み等が生じるためである。
【0030】
また、人体に近い衣服圧の測定値を得るためには、剛体ダミーではなく、人体と同等の硬さ分布を持つダミーが必要である。
【0031】
さらに、剛体ダミーでは駆動が不可能なため、剛体でなく、弾性部材を使用したダミーへ駆動ユニットを付加し、ヒトと同様な動作をするように駆動可能な装置となれば、ダミーでいて人体での測定値と同等の評価が可能になる。
【0032】
以上の見地から、本発明者達は、次に述べる、本発明の好ましい実施の形態のダミーを開発するに至った。
【0033】
以下、図面を参照して、本発明の好ましい実施の形態をより詳細に説明する。
【0034】
まず、ダミー作製時に必要なサイズ,形状を決定した。人体3次元計測装置を用い、中年女性被験者のデータを収集し、社団法人人間工学研究センターの日本人の人体寸法データを参考にして形状を決定し、金型を作成した。
【0035】
次に、ダミーを構成する材料について検討した。人体および弾性体の硬さを測定するのに、伊藤超短波株式会社製の組織硬度計OE−220を使用した。まず、この組織硬度計の測定原理について説明する。
【0036】
図1は、この組織硬度計10を説明するための概略斜視図である。組織硬度計10は、本体20と、測定対象物の測定部位に当接される中央部12と、測定対象物の測定部位の周辺部に当接される周辺部14とを備えている。中央部12は本体20に固定されている。周辺部14には、コイルバネ等の付勢部材(図示せず)の一端が取り付けられている。コイルバネ等の付勢部材の他端は、本体20に固定されている。また、組織硬度計10は、測定対象物の測定部位から中央部12が受ける圧力を測定する圧力センサ16と、測定対象物の測定部位およびその周辺部から中央部12および周辺部14が受ける圧力を測定する圧力センサ18とを備えている。
【0037】
外力を加えない状態では、中央部12の先端面と周辺部14の先端面とは面一となっている。本体20を、測定対象物に向けて押し付けることによって、中央部12は、測定対象物の測定部位に押し当てられ、周辺部14は、測定対象物の測定部位の周辺部に押し当てられる。測定対象物の測定部位および測定部位の周辺部に組織硬度計10の中央部12および周辺部14によって圧力を加えていくと、組織硬度計10の中央部12および周辺部14は、測定対象物の測定部位および測定部位の周辺部からそれぞれ反力を受ける。組織硬度計10の周辺部14は、コイルバネ等の付勢部材(図示せず)の付勢に抗して押し戻される。このとき、組織硬度計10の周辺部14が受けた力は、センサ18に伝達される。組織硬度計10の中央部12が受けた力は、センサ16およびセンサ18に伝達される。このようにして、測定対象物の測定部位およびその周辺部から組織硬度計10の中央部12および周辺部14が受ける圧力はセンサ18に伝達され、測定対象物の測定部位から組織硬度計10の中央部12が受ける圧力はセンサ16に伝達される。すなわち、センサ16で組織硬度計10の中央部12が受けた力を測定し、センサ18で組織硬度計10の中央部12および周辺部14が受けた力を測定する。
【0038】
図2(A)を参照すれば、測定対象物30が硬い場合には、測定対象物30の変形が小さく、測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22は大きく、反力も大きい。一方、測定対象物の測定部位32の周辺部34から組織硬度計10の周辺部14が受ける力24は小さい。
【0039】
図2(B)を参照すれば、測定対象物30が柔らかい場合には、測定対象物30の変形が大きく、測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22は小さく、反力も小さい。一方、測定対象物の測定部位32の周辺部34から組織硬度計10の周辺部14が受ける力24は大きい。
【0040】
測定対象物30の硬さは、測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22と測定対象物の測定部位32の周辺部34から組織硬度計10の周辺部14が受ける力24との合計が10Nになった際の、この合計の力に対する測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22の割合(%)で表す。すなわち、センサ18で測定した力が10Nになった際の、このセンサ18で測定した力に対するセンサ16で測定した力の割合(%)で表す。
【0041】
硬さを段階的に変化させることのできるウレタン樹脂について,配合を段階的に変化させた硬さを変えた、プリン型サンプル5種(型名:PC−0、PC−10、PC−15、PC−20、PC−25)の硬さを、上述の伊藤超短波株式会社製の組織硬度計OE−220を使用して測定した。その結果を図3に示す。プリン型サンプルの硬さの範囲は、25〜50(%)程度であった。
【0042】
また、このうちPC−10の厚さを変化させていき、どのように硬さが変化するかを検討した。その結果を図4に示す。PC−10の厚さを変化させると、厚さが40mm〜10mmと変化するにつれて硬くなり、硬さは27〜45(%)程度の変化をすることがわかった。
【0043】
また、人体の硬さを、同じ伊藤超短波株式会社製の組織硬度計OE−220を使用して測定し、人体の硬さ分布を把握した。その結果を図5に示す。人体の硬さは骨格部の影響と、脂肪や筋肉の付き具合で部位による差がみられた。具体的には腹部、臀部最突点〜下部、大腿部前後面は20(%)程度の硬さ、臀部外側、大腿部外側は30(%)程度の硬さ、腸骨棘部等の骨格に近い部位は70(%)程度の硬さであった。
【0044】
なお、腹部,臀部下部は脂肪がつく部位であり、力を加えると変形が大きい部位という特徴がある。そこで、脂肪がつく部位に好適な部材を選定するために、ウレタン樹脂について,配合を段階的に変化させた硬さを変えた、プリン型サンプル3種(型名:PC−0、PC−10、PC−25)の圧縮特性を測定した。測定は、カトーテック株式会社製のハンディー圧縮試験機KES−G5を使用して行った。2cm2の面で、100gfの圧縮加重、0.01cm/sec圧縮速度で圧縮した結果を図6に示す。同じ力で圧縮した際の距離を変形量とすると、PC−25、PC10、PC−0の順に変化量が大きいことがわかる。
【0045】
以上のデータを基にして、人体の硬さ分布を再現するために,図7に示すように、ダミー40の主材料として、硬さ27(%)程度のウレタン樹脂(PC−10)からなる弾性部材42を使用し、その内部に人体骨格標本50(図8参照)を埋め込んだ。そして、腹部,臀部下部は,二層構造とし,硬さ27(%)のウレタン樹脂(PC−10)からなる弾性部材42を配置した外側へ硬さ29(%)で変形量の大きなウレタン樹脂(PC−0)からなる弾性部材44をそれぞれ配置した。
【0046】
また、大腿部は,筋肉部であり、硬さ46(%)程度のウレタン樹脂(PC−25)からなる弾性部材46を横長の楕円柱のように成型し、転子点より下部の内側へ配置し,その外側を硬さ27(%)程度のウレタン樹脂(PC−10)からなる弾性部材42とした。このとき、硬さ27(%)程度の硬さの弾性部材42の厚みが、大腿部前後面では40mm、大腿部外側は10mmになるように配置した。
【0047】
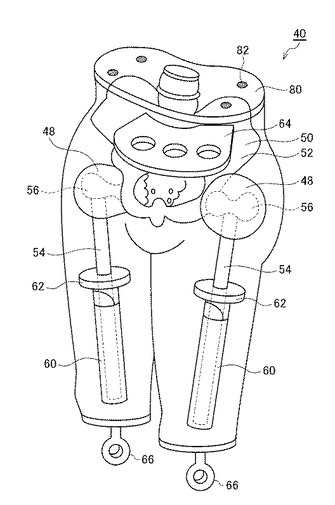
なお、図8に示すように、弾性部材42、46の内部には、人体骨格標本50が埋め込まれている。弾性部材42の内部には、人体骨格標本50の骨盤骨52を埋め込み、弾性部材46の内部には、人体骨格標本50の大腿骨54を埋め込んでいる。また、歩行動作をしても外れないよう、骨盤骨52と大腿骨54をつなぐ転子点56を可動用超ゲル化樹脂48で補強した。
【0048】
また、弾性部材42等の自重に耐えうるように、骨盤骨52に自重垂れ防止セパレータ64を設けている。なお、弾性部材42の内部には、骨盤骨52だけでなく、自重垂れ防止セパレータ64も埋め込まれている。
【0049】
また、大腿骨54には、弾性部材46、42の自重に耐えうるように、自重垂れ防止セパレータ62を設けている。さらに、大腿骨54を覆って、大腿骨補強金具60が設けられている。なお、弾性部材46の内部には、人体骨格標本50の大腿骨54だけでなく、自重垂れ防止セパレータ62および大腿骨補強金具60も埋め込まれている。
【0050】
以上のようにして作成したダミーの、伊藤超短波株式会社製の組織硬度計OE−220を使用して測定した部位別の硬さを図5に、人体の部位別の硬さと合わせて示す。図5によれば、人体の硬さ分布に近い分布を示していることがわかる。
【0051】
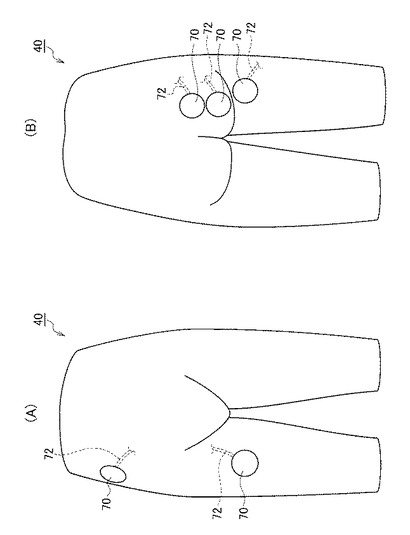
図9を参照すれば、ダミー40の表面には、センサ70が取り付けられている。本実施の形態では、センサ70として、エアパック式接触圧センサを使用している。センサ70によって衣服圧を測定する。なお、衣服圧とは、衣服により、皮膚が受ける圧迫力をいう。センサに繋がっているコード等を取り込めるように、弾性部材42、44、46の内側には、チューブ72等を埋め込んでいる。
【0052】
図8を再び参照すれば、大腿骨54の端部には、取り付け具66が設けられている。取り付け具66に後述する駆動装置を取り付けることにより、歩行動作を模擬した動作を行わせることができる。また、ダミー40の頂部には、取り付け部80が設けられ、取り付け部80にはネジ穴82が設けられている。
【0053】
次に、本実施の形態のダミー40の製造方法を説明する。まず、人体骨格標本50を準備する。そして、大腿骨54を大腿骨補強金具60で補強する等、動作に耐えうるよう人体骨格標本50をあらかじめ補強をしておく。また、弾性部材42、44、46等の自重に耐えうるように、自重垂れ防止セパレータ62、64を設けておく。さらに、動作を歩行動作としたときに、動きに耐えうるように、骨盤骨52と大腿骨54をつなぐ転子点56等の可動部(関節部)を超ゲル化樹脂48等で補強をしておく。さらに、センサ70を内側へ取り付ける部位には、センサを取り込めるように内側へチューブ72等を埋め込める仕組みを備えておく。
【0054】
次に人体サイズ、形状データを基に金型の原型を作製し、弾性部材を流しこみ成型する。これはまず、脚部に埋め込む横長楕円柱(円錐の最突点を切り落としたような形のもの)を硬さの46(%)のウレタン樹脂(PC−25)からなる弾性部材46であらかじめ作製しておく。このとき、人体骨格標本50の大腿骨部54、大腿骨補強金具60、自重垂れ防止セパレータ62等を弾性部材46の内部へ埋め込む。次に、腹部中央及び臀部下部といった力が加わると、変形の大きな部位へ硬さ29(%)程度のウレタン樹脂(PC−0)からなる弾性部材44を流し込む。その後、型全体へ硬さ27(%)程度のウレタン樹脂(PC−10)からなる弾性部材42を流し込み成型する。その後、歩行動作を模擬した動作をするよう、取り付け具66に後述する駆動装置を取り付ける。
【0055】
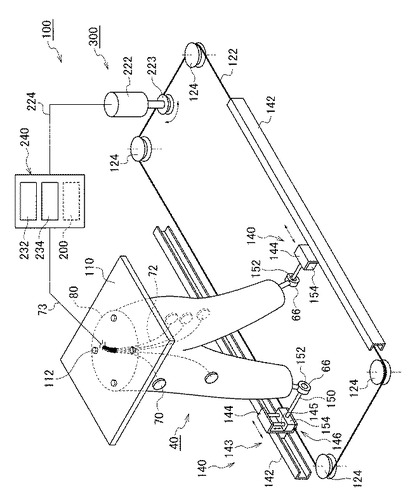
次に、本発明の好ましい実施の形態の衣服圧測定装置100を説明する。図10を参照すれば、衣服圧測定装置100は、上述のダミー40と、ダミー40を取り付けるダミー取り付け板110と、ダミー40の取り付け具66に取り付けられ、ダミー40に歩行動作を模擬した動作をさせる駆動装置300と、駆動装置300を駆動するとともに、センサ70からの圧力測定データを取得するように、駆動装置300および圧力センサ70を制御するコントローラ200とを備えている。コントローラ200はコンソール240に収容されている。
【0056】
駆動装置300は、左右2個の揺動機構140と揺動機構140を駆動するモータ222とを備えている。揺動機構140は、水平方向に直線移動する移動部材144と移動部材144の水平方向の移動をガイドする水平ガイド142とを有する水平移動機構143と、垂直方向に直線移動する移動部材154と移動部材154の垂直方向の移動をガイドする垂直ガイド145とを有する垂直移動機構146とを備えている。垂直ガイド145は、移動部材144に取り付けられ、固定されている。移動部材144に水平方向に移動するワイヤ122が取り付けられている。ワイヤ122は、プーリー124によって水平に張られており、モータ222のプーリー223に架けられている。移動部材154にはバー150が水平に取り付けられている。なお、移動部材154の水平方向の移動は、垂直ガイド145によって規制されているので、移動部材154は、移動部材144の水平方向の移動に従って水平方向に移動する。
【0057】
ダミー40の頂部の取り付け部80のネジ穴82(図8参照)に、ダミー取り付け板110を介してネジ112を取り付けることによって、ダミー40はダミー取り付け板110に取り付けられる。
【0058】
移動部材154に水平に取り付けられたバー150の先端部を、ダミー40の取り付け具66内に取り付けられたボールジョイント152を介して取り付け具66に取り付ける。センサ70をコード73を介してコントローラ200に接続する。なお、モータ222は配線224を介してコントローラ200に接続されている。
【0059】
モータ222を左右に回転させることによって、移動部材154が水平方向および垂直方向に移動し、それによって、ダミー40の取り付け具66、そして取り付け具66が取り付けられている大腿骨54が、転子点56(関節部)の回りに揺動する。なお、垂直移動部材154が移動する水平方向および垂直方向は、大腿骨54が、転子点56(関節部)の回りに揺動する面と平行な面内にある。
【0060】
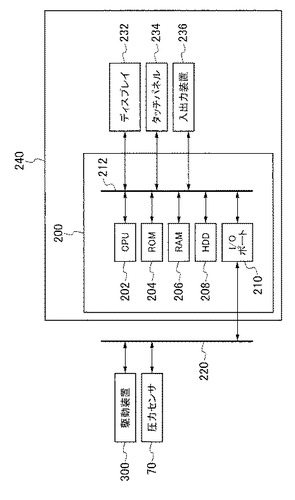
図11を参照すれば、コンソール240は、センサ70から取得した圧力測定データや、当該圧力測定データがデータ処理されたデータ等を表示するディスプレイ232と、歩行速度等の測定条件を受け付けるタッチパネル234と、キーボード等の入出力装置236と、コントローラ200とを備えている。
【0061】
コントローラ200は、装置全体の動作を司るCPU(Central Processing Unit)202と、制御プログラムを含む各種プログラム等が予め記憶されたROM204と、各種データを一時的に記憶するRAM206と、各種データを記憶して保持するHDD(ハードディスクドライブ)208と、I/Oポート210とを備えたコンピュータとして構成されている。CPU202、ROM204、RAM206、HDD208、I/Oポート210、ディスプレイ232、タッチパネル234、入出力装置236は、内部バス212を介して相互に接続されている。I/Oポート210は、外部バス220を介して駆動装置300および圧力センサ70に接続されている。
【0062】
次に、衣服圧測定装置100の動作について説明する。まず、被服を着用したダミー40を上述のようにして、衣服圧測定装置100に取り付ける。その後、衣服圧を測定する被服(図示せず)をダミー40に着用させる。
【0063】
その後、コンソール240のタッチパネル234から歩行速度等を入力する。コントローラは、予めインストールされたプログラムに従い、当該歩行速度等の制御データを受け付け、受け付けた制御データに基づいて駆動装置300を駆動する。そして、センサ70からの圧力測定データを取得し、HDD208に記録するとともに、当該圧力測定データをデータ処理して、データ処理されたデータをディスプレイ232に表示する。
【実施例】
【0064】
次に、上述の衣服圧測定装置100を用いて測定した衣服圧の測定結果について説明する。図12は、衣服圧測定装置100を用いてガードルを着用させた場合の大腿部前面の衣服圧測定結果を示す図であり、図13は、衣服圧測定装置100を用いてガードルを着用させた場合の臀部外側の衣服圧測定結果を示す図である。破線はダミー40を使用して測定した衣服圧測定結果を示し、実線は、40代の被験者の平均値を示している。測定に使用した歩行速度は、ダミー40の場合も、被験者の場合もいずれも1.4m/秒であった。ダミー40を用いた場合も、被験者の場合に近い値の衣服圧測定結果が得られていることがわかる。
【0065】
以上説明したように、本発明の好ましい実施の形態では、骨格部としての人体骨格標本50と、骨格部を取り包む弾性部としての弾性部材42、44、46を備え、弾性部材42より変化量の大きい弾性部材44を弾性部材42の表面に配置し、弾性部材42より硬い弾性部材46を弾性部材42の内部に配置しているので、人体と近い硬さおよび変化量分布とすることができ、衣服圧の測定値を、より人体に近い測定値とすることができる。
【0066】
また、骨格部としての人体骨格標本50を取り包んでいるのは、剛体ではなく、弾性部材42、44、46なので、動作が可能なダミーとすることができ、人体に似せた動作をさせることができるようになる。
【0067】
また、ダミー40の表面、すなわち、弾性部材42や44の表面にセンサ70をとりつけているので、衣服圧、ここでは、衣服により、ダミー40の表面、すなわち、弾性部材42や44の表面が受ける圧迫力を測定することができる。
【0068】
取り付け具66に駆動装置300を取り付けることにより、歩行動作を模擬した動作をさせることができ、長時間の着用での衣服圧の変化や、衣服の人体への馴染みや食い込みを含めた測定ができるようになる。
【0069】
なお、上記実施の形態では、弾性部材42、44、46としてウレタン樹脂を使用したが、ウレタン樹脂に代えて、シリコーン樹脂、ゲル化樹脂等を使用してもよい。また、上記実施の形態では、弾性部材の硬さを、40代女性を一例にして作成したが、年代(20代、30代等)や性別、さらにスポーツ選手などそれぞれの人体硬さ分布にあわせて、弾性部材の硬さ等を適宜に変更して作成することができる。例えば、20代女性であれば、弾性部材の硬さを30代よりも硬め(例えば腹部、臀部において、硬さ30%程度の範囲のウレタン樹脂と、その外側には硬さ35%程度の範囲のウレタン樹脂にてダミーを作成したり、30代女性であれば、弾性部材の硬さを40代よりも硬め(例えば腹部、臀部において硬さ28%程度の範囲のウレタン樹脂と、その外側には硬さ32%程度の範囲のウレタン樹脂にてダミーを作成することができる。スポーツ選手であれば、通常発達した筋肉を有することを考慮し、より硬めに設定するとよい。
【0070】
以上、本発明の種々の典型的な実施の形態を説明してきたが、本発明はそれらの実施の形態に限定されない。従って、本発明の範囲は、次の特許請求の範囲によってのみ限定されるものである。
【符号の説明】
【0071】
40 ダミー
42 弾性部材
44 弾性部材
46 弾性部材
48 可動用超ゲル化樹脂
50 人体骨格標本
52 骨盤骨
54 大腿骨
56 転子点
60 大腿骨補強金具
62、64 自重垂れ防止セパレータ
66 取り付け具
70 センサ
72 チューブ
100 衣服圧測定装置
200 コントローラ
232 ディスプレイ
234 タッチパネル
300 駆動装置
【技術分野】
【0001】
本発明は人体模型、衣服圧測定装置および衣服圧測定方法に関し、特に、衣服圧測定用の人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法に関する。
【背景技術】
【0002】
衣服の圧的快適性について評価を行う技術としては、衣服圧の測定が一般的である。従来の衣服圧の測定方法には、直接測定する方法と、布地の変化量から推定する方法がある。前者には、(1)人体各部位にセンサを取り付けて人体を用いて測定する方法と,(2)人体模型(以下、ダミーと称する)等へセンサを取り付けて測定する方法があり、後者には、コンピュータシミュレーションで測定値を確認する方法がある。
【0003】
衣服はヒトが着用して初めてその効果を発揮するものであるため,(1)の方法で人体を用いて測定することが望ましいが,被験者や測定者の拘束時間が長く精神的,肉体的負担が大きく、また個人差,日間誤差が大きい等の、被験者実験での各種の問題点が伴う。またコンピュータシミュレーションはデータ作成が困難であり実際的とはいえない。そこで,製品開発や品質管理の現場では二つ目の、ダミーを用いる方法が多く用いられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−70806号公報
【特許文献2】特開2006−176930号公報
【特許文献3】特開2004−163127号公報
【特許文献4】特開昭55−96113号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
現在上記二つ目の方法で用いられているダミーの多くは,人体形状を模した剛体ダミーである。剛体ダミーでは,短時間で測定ができ,測定者への負担が少ないことが利点である。しかしながら、剛体ダミーで衣服圧を測定した場合,人体での測定値とは大きな差がある。
【0006】
また、剛体ダミーではなく、弾性部材を使用したダミーも提案されている(特許文献1〜4参照)が、人体に近い衣服圧測定を行えるダミーではない。
【0007】
従って、本発明の主な目的は、人体に近い衣服圧測定を行える人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明の一態様によれば、
骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、
を備える人体模型が提供される。
【0009】
好ましくは、前記人体模型は、前記弾性部の表面に設けられた圧力センサをさらに備える。
【0010】
また、好ましくは、前記弾性部は、人体の硬さ分布に則して前記第1乃至第3の弾性部材が配置されている。
【0011】
また、好ましくは、前記骨格部は、関節部と、前記関節部の両側の第1および第2の骨格部材と、を有している。
【0012】
また、好ましくは、前記骨格部は、人体骨格標本である。
【0013】
また、好ましくは、前記人体模型は、前記人体骨格標本に取り付けられた自重垂れ防止セパレータをさらに備える。
【0014】
また、好ましくは、前記人体模型は、前記人体骨格標本に設けられた補強金具をさらに備える。
【0015】
また、好ましくは、前記人体模型は、前記人体骨格標本の関節部を補強する補強部材をさらに備える。
【0016】
また、好ましくは、前記骨格部は、腰部と、大腿部と、前記腰部と前記大腿部とをつなぐ関節部とを有し、前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている。
【0017】
また、好ましくは、前記第3の弾性部材は、横長の楕円柱形状である。
【0018】
また、本発明の他の態様によれば、
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサとを備える人体模型と、
前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置と、
前記駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するように、前記駆動装置および前記圧力センサを制御する制御手段と、
を備える衣服圧測定装置が提供される。
【0019】
好ましくは、前記衣服圧測定装置は表示手段をさらに備え、
前記制御部は、前記圧力測定データをデータ処理して、データ処理されたデータを前記表示手段に表示するように前記表示手段を制御する。
【0020】
また、好ましくは、前記駆動装置は、前記第2の骨格部材が前記間接部の回りに揺動する面と平行な面内で互いに直交する2方向にそれぞれ直線運動する直線運動機構を備える。
【0021】
また、好ましくは、前記第1の骨格部材は腰部であり、前記第2の骨格部材は大腿部であり、前記関節部は、前記腰部と前記大腿部とをつなぐ関節部である。
【0022】
また、好ましくは、前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている。
【0023】
また、好ましくは、前記衣服圧測定装置は入力手段をさらに備え、
前記制御部は、前記入力手段による制御データを受け付け、前記受け付けた制御データに基づいて前記駆動装置を駆動するように前記入力手段および前記駆動装置を制御する。
【0024】
また、好ましくは、前記制御データは、歩行速度である。
【0025】
また、本発明のさらに他の態様によれば、
コンピュータが、
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサと、を備え、衣服が着用された人体模型の、前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するステップを備える衣服圧測定方法が提供される。
【発明の効果】
【0026】
本発明によれば、人体に近い衣服圧測定を行える人体模型、当該人体模型を用いた衣服圧測定装置および衣服圧測定方法が提供される。
【図面の簡単な説明】
【0027】
【図1】図1は、本発明の好ましい実施の形態で使用した組織硬度計を説明するための概略斜視図である。
【図2】図2は、本発明の好ましい実施の形態で使用した組織硬度計で硬さを測定する方法を説明するための概略断面図である。
【図3】図3は、本発明の好ましい実施の形態で使用したウレタン樹脂の硬さ示す図である。
【図4】図4は、本発明の好ましい実施の形態で使用したウレタン樹脂の厚さを変えた時の硬さを示す図である。
【図5】図5は、人体と、本発明の好ましい実施の形態のダミーとの硬さ分布を示す図である。
【図6】図6は、本発明の好ましい実施の形態で使用したウレタン樹脂の圧縮特性を示す図である。
【図7】図7は、本発明の好ましい実施の形態のダミーの弾性部材の配置を説明するための概略立体図である。
【図8】図8は、本発明の好ましい実施の形態のダミーの骨格部を説明するための概略立体図である。
【図9】図9は、本発明の好ましい実施の形態のダミーへのセンサの取り付けを説明するための概略立体図である。
【図10】図10は、本発明の好ましい実施の形態の衣服圧測定装置を説明するための概略斜視図である。
【図11】図11は、本発明の好ましい実施の形態の衣服圧測定装置に好適に使用されるコントローラを説明するための概略構成図である。
【図12】図12は、本発明の好ましい実施の形態の衣服圧測定装置で測定した大腿部前面の衣服圧測定結果を示す図である。
【図13】図13は、本発明の好ましい実施の形態の衣服圧測定装置で測定した臀部外側の衣服圧測定結果を示す図である。
【発明を実施するための形態】
【0028】
本発明者達は、人体に近い衣服圧測定を行える人体模型について、鋭意研究した結果、以下の知見を得た。
【0029】
剛体ダミーで衣服圧を測定した場合,人体での測定値とは大きな差があるのは、人体には柔らかい部位(主に脂肪の多い部位)と硬い部位(主に筋肉や骨格の部位)があり,柔らかい部位は衣服が人体へ馴染み、また関節部分は動作をするため衣服の食い込み等が生じるためである。
【0030】
また、人体に近い衣服圧の測定値を得るためには、剛体ダミーではなく、人体と同等の硬さ分布を持つダミーが必要である。
【0031】
さらに、剛体ダミーでは駆動が不可能なため、剛体でなく、弾性部材を使用したダミーへ駆動ユニットを付加し、ヒトと同様な動作をするように駆動可能な装置となれば、ダミーでいて人体での測定値と同等の評価が可能になる。
【0032】
以上の見地から、本発明者達は、次に述べる、本発明の好ましい実施の形態のダミーを開発するに至った。
【0033】
以下、図面を参照して、本発明の好ましい実施の形態をより詳細に説明する。
【0034】
まず、ダミー作製時に必要なサイズ,形状を決定した。人体3次元計測装置を用い、中年女性被験者のデータを収集し、社団法人人間工学研究センターの日本人の人体寸法データを参考にして形状を決定し、金型を作成した。
【0035】
次に、ダミーを構成する材料について検討した。人体および弾性体の硬さを測定するのに、伊藤超短波株式会社製の組織硬度計OE−220を使用した。まず、この組織硬度計の測定原理について説明する。
【0036】
図1は、この組織硬度計10を説明するための概略斜視図である。組織硬度計10は、本体20と、測定対象物の測定部位に当接される中央部12と、測定対象物の測定部位の周辺部に当接される周辺部14とを備えている。中央部12は本体20に固定されている。周辺部14には、コイルバネ等の付勢部材(図示せず)の一端が取り付けられている。コイルバネ等の付勢部材の他端は、本体20に固定されている。また、組織硬度計10は、測定対象物の測定部位から中央部12が受ける圧力を測定する圧力センサ16と、測定対象物の測定部位およびその周辺部から中央部12および周辺部14が受ける圧力を測定する圧力センサ18とを備えている。
【0037】
外力を加えない状態では、中央部12の先端面と周辺部14の先端面とは面一となっている。本体20を、測定対象物に向けて押し付けることによって、中央部12は、測定対象物の測定部位に押し当てられ、周辺部14は、測定対象物の測定部位の周辺部に押し当てられる。測定対象物の測定部位および測定部位の周辺部に組織硬度計10の中央部12および周辺部14によって圧力を加えていくと、組織硬度計10の中央部12および周辺部14は、測定対象物の測定部位および測定部位の周辺部からそれぞれ反力を受ける。組織硬度計10の周辺部14は、コイルバネ等の付勢部材(図示せず)の付勢に抗して押し戻される。このとき、組織硬度計10の周辺部14が受けた力は、センサ18に伝達される。組織硬度計10の中央部12が受けた力は、センサ16およびセンサ18に伝達される。このようにして、測定対象物の測定部位およびその周辺部から組織硬度計10の中央部12および周辺部14が受ける圧力はセンサ18に伝達され、測定対象物の測定部位から組織硬度計10の中央部12が受ける圧力はセンサ16に伝達される。すなわち、センサ16で組織硬度計10の中央部12が受けた力を測定し、センサ18で組織硬度計10の中央部12および周辺部14が受けた力を測定する。
【0038】
図2(A)を参照すれば、測定対象物30が硬い場合には、測定対象物30の変形が小さく、測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22は大きく、反力も大きい。一方、測定対象物の測定部位32の周辺部34から組織硬度計10の周辺部14が受ける力24は小さい。
【0039】
図2(B)を参照すれば、測定対象物30が柔らかい場合には、測定対象物30の変形が大きく、測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22は小さく、反力も小さい。一方、測定対象物の測定部位32の周辺部34から組織硬度計10の周辺部14が受ける力24は大きい。
【0040】
測定対象物30の硬さは、測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22と測定対象物の測定部位32の周辺部34から組織硬度計10の周辺部14が受ける力24との合計が10Nになった際の、この合計の力に対する測定対象物30の測定部位32に組織硬度計10の中央部12から加えられる力22の割合(%)で表す。すなわち、センサ18で測定した力が10Nになった際の、このセンサ18で測定した力に対するセンサ16で測定した力の割合(%)で表す。
【0041】
硬さを段階的に変化させることのできるウレタン樹脂について,配合を段階的に変化させた硬さを変えた、プリン型サンプル5種(型名:PC−0、PC−10、PC−15、PC−20、PC−25)の硬さを、上述の伊藤超短波株式会社製の組織硬度計OE−220を使用して測定した。その結果を図3に示す。プリン型サンプルの硬さの範囲は、25〜50(%)程度であった。
【0042】
また、このうちPC−10の厚さを変化させていき、どのように硬さが変化するかを検討した。その結果を図4に示す。PC−10の厚さを変化させると、厚さが40mm〜10mmと変化するにつれて硬くなり、硬さは27〜45(%)程度の変化をすることがわかった。
【0043】
また、人体の硬さを、同じ伊藤超短波株式会社製の組織硬度計OE−220を使用して測定し、人体の硬さ分布を把握した。その結果を図5に示す。人体の硬さは骨格部の影響と、脂肪や筋肉の付き具合で部位による差がみられた。具体的には腹部、臀部最突点〜下部、大腿部前後面は20(%)程度の硬さ、臀部外側、大腿部外側は30(%)程度の硬さ、腸骨棘部等の骨格に近い部位は70(%)程度の硬さであった。
【0044】
なお、腹部,臀部下部は脂肪がつく部位であり、力を加えると変形が大きい部位という特徴がある。そこで、脂肪がつく部位に好適な部材を選定するために、ウレタン樹脂について,配合を段階的に変化させた硬さを変えた、プリン型サンプル3種(型名:PC−0、PC−10、PC−25)の圧縮特性を測定した。測定は、カトーテック株式会社製のハンディー圧縮試験機KES−G5を使用して行った。2cm2の面で、100gfの圧縮加重、0.01cm/sec圧縮速度で圧縮した結果を図6に示す。同じ力で圧縮した際の距離を変形量とすると、PC−25、PC10、PC−0の順に変化量が大きいことがわかる。
【0045】
以上のデータを基にして、人体の硬さ分布を再現するために,図7に示すように、ダミー40の主材料として、硬さ27(%)程度のウレタン樹脂(PC−10)からなる弾性部材42を使用し、その内部に人体骨格標本50(図8参照)を埋め込んだ。そして、腹部,臀部下部は,二層構造とし,硬さ27(%)のウレタン樹脂(PC−10)からなる弾性部材42を配置した外側へ硬さ29(%)で変形量の大きなウレタン樹脂(PC−0)からなる弾性部材44をそれぞれ配置した。
【0046】
また、大腿部は,筋肉部であり、硬さ46(%)程度のウレタン樹脂(PC−25)からなる弾性部材46を横長の楕円柱のように成型し、転子点より下部の内側へ配置し,その外側を硬さ27(%)程度のウレタン樹脂(PC−10)からなる弾性部材42とした。このとき、硬さ27(%)程度の硬さの弾性部材42の厚みが、大腿部前後面では40mm、大腿部外側は10mmになるように配置した。
【0047】
なお、図8に示すように、弾性部材42、46の内部には、人体骨格標本50が埋め込まれている。弾性部材42の内部には、人体骨格標本50の骨盤骨52を埋め込み、弾性部材46の内部には、人体骨格標本50の大腿骨54を埋め込んでいる。また、歩行動作をしても外れないよう、骨盤骨52と大腿骨54をつなぐ転子点56を可動用超ゲル化樹脂48で補強した。
【0048】
また、弾性部材42等の自重に耐えうるように、骨盤骨52に自重垂れ防止セパレータ64を設けている。なお、弾性部材42の内部には、骨盤骨52だけでなく、自重垂れ防止セパレータ64も埋め込まれている。
【0049】
また、大腿骨54には、弾性部材46、42の自重に耐えうるように、自重垂れ防止セパレータ62を設けている。さらに、大腿骨54を覆って、大腿骨補強金具60が設けられている。なお、弾性部材46の内部には、人体骨格標本50の大腿骨54だけでなく、自重垂れ防止セパレータ62および大腿骨補強金具60も埋め込まれている。
【0050】
以上のようにして作成したダミーの、伊藤超短波株式会社製の組織硬度計OE−220を使用して測定した部位別の硬さを図5に、人体の部位別の硬さと合わせて示す。図5によれば、人体の硬さ分布に近い分布を示していることがわかる。
【0051】
図9を参照すれば、ダミー40の表面には、センサ70が取り付けられている。本実施の形態では、センサ70として、エアパック式接触圧センサを使用している。センサ70によって衣服圧を測定する。なお、衣服圧とは、衣服により、皮膚が受ける圧迫力をいう。センサに繋がっているコード等を取り込めるように、弾性部材42、44、46の内側には、チューブ72等を埋め込んでいる。
【0052】
図8を再び参照すれば、大腿骨54の端部には、取り付け具66が設けられている。取り付け具66に後述する駆動装置を取り付けることにより、歩行動作を模擬した動作を行わせることができる。また、ダミー40の頂部には、取り付け部80が設けられ、取り付け部80にはネジ穴82が設けられている。
【0053】
次に、本実施の形態のダミー40の製造方法を説明する。まず、人体骨格標本50を準備する。そして、大腿骨54を大腿骨補強金具60で補強する等、動作に耐えうるよう人体骨格標本50をあらかじめ補強をしておく。また、弾性部材42、44、46等の自重に耐えうるように、自重垂れ防止セパレータ62、64を設けておく。さらに、動作を歩行動作としたときに、動きに耐えうるように、骨盤骨52と大腿骨54をつなぐ転子点56等の可動部(関節部)を超ゲル化樹脂48等で補強をしておく。さらに、センサ70を内側へ取り付ける部位には、センサを取り込めるように内側へチューブ72等を埋め込める仕組みを備えておく。
【0054】
次に人体サイズ、形状データを基に金型の原型を作製し、弾性部材を流しこみ成型する。これはまず、脚部に埋め込む横長楕円柱(円錐の最突点を切り落としたような形のもの)を硬さの46(%)のウレタン樹脂(PC−25)からなる弾性部材46であらかじめ作製しておく。このとき、人体骨格標本50の大腿骨部54、大腿骨補強金具60、自重垂れ防止セパレータ62等を弾性部材46の内部へ埋め込む。次に、腹部中央及び臀部下部といった力が加わると、変形の大きな部位へ硬さ29(%)程度のウレタン樹脂(PC−0)からなる弾性部材44を流し込む。その後、型全体へ硬さ27(%)程度のウレタン樹脂(PC−10)からなる弾性部材42を流し込み成型する。その後、歩行動作を模擬した動作をするよう、取り付け具66に後述する駆動装置を取り付ける。
【0055】
次に、本発明の好ましい実施の形態の衣服圧測定装置100を説明する。図10を参照すれば、衣服圧測定装置100は、上述のダミー40と、ダミー40を取り付けるダミー取り付け板110と、ダミー40の取り付け具66に取り付けられ、ダミー40に歩行動作を模擬した動作をさせる駆動装置300と、駆動装置300を駆動するとともに、センサ70からの圧力測定データを取得するように、駆動装置300および圧力センサ70を制御するコントローラ200とを備えている。コントローラ200はコンソール240に収容されている。
【0056】
駆動装置300は、左右2個の揺動機構140と揺動機構140を駆動するモータ222とを備えている。揺動機構140は、水平方向に直線移動する移動部材144と移動部材144の水平方向の移動をガイドする水平ガイド142とを有する水平移動機構143と、垂直方向に直線移動する移動部材154と移動部材154の垂直方向の移動をガイドする垂直ガイド145とを有する垂直移動機構146とを備えている。垂直ガイド145は、移動部材144に取り付けられ、固定されている。移動部材144に水平方向に移動するワイヤ122が取り付けられている。ワイヤ122は、プーリー124によって水平に張られており、モータ222のプーリー223に架けられている。移動部材154にはバー150が水平に取り付けられている。なお、移動部材154の水平方向の移動は、垂直ガイド145によって規制されているので、移動部材154は、移動部材144の水平方向の移動に従って水平方向に移動する。
【0057】
ダミー40の頂部の取り付け部80のネジ穴82(図8参照)に、ダミー取り付け板110を介してネジ112を取り付けることによって、ダミー40はダミー取り付け板110に取り付けられる。
【0058】
移動部材154に水平に取り付けられたバー150の先端部を、ダミー40の取り付け具66内に取り付けられたボールジョイント152を介して取り付け具66に取り付ける。センサ70をコード73を介してコントローラ200に接続する。なお、モータ222は配線224を介してコントローラ200に接続されている。
【0059】
モータ222を左右に回転させることによって、移動部材154が水平方向および垂直方向に移動し、それによって、ダミー40の取り付け具66、そして取り付け具66が取り付けられている大腿骨54が、転子点56(関節部)の回りに揺動する。なお、垂直移動部材154が移動する水平方向および垂直方向は、大腿骨54が、転子点56(関節部)の回りに揺動する面と平行な面内にある。
【0060】
図11を参照すれば、コンソール240は、センサ70から取得した圧力測定データや、当該圧力測定データがデータ処理されたデータ等を表示するディスプレイ232と、歩行速度等の測定条件を受け付けるタッチパネル234と、キーボード等の入出力装置236と、コントローラ200とを備えている。
【0061】
コントローラ200は、装置全体の動作を司るCPU(Central Processing Unit)202と、制御プログラムを含む各種プログラム等が予め記憶されたROM204と、各種データを一時的に記憶するRAM206と、各種データを記憶して保持するHDD(ハードディスクドライブ)208と、I/Oポート210とを備えたコンピュータとして構成されている。CPU202、ROM204、RAM206、HDD208、I/Oポート210、ディスプレイ232、タッチパネル234、入出力装置236は、内部バス212を介して相互に接続されている。I/Oポート210は、外部バス220を介して駆動装置300および圧力センサ70に接続されている。
【0062】
次に、衣服圧測定装置100の動作について説明する。まず、被服を着用したダミー40を上述のようにして、衣服圧測定装置100に取り付ける。その後、衣服圧を測定する被服(図示せず)をダミー40に着用させる。
【0063】
その後、コンソール240のタッチパネル234から歩行速度等を入力する。コントローラは、予めインストールされたプログラムに従い、当該歩行速度等の制御データを受け付け、受け付けた制御データに基づいて駆動装置300を駆動する。そして、センサ70からの圧力測定データを取得し、HDD208に記録するとともに、当該圧力測定データをデータ処理して、データ処理されたデータをディスプレイ232に表示する。
【実施例】
【0064】
次に、上述の衣服圧測定装置100を用いて測定した衣服圧の測定結果について説明する。図12は、衣服圧測定装置100を用いてガードルを着用させた場合の大腿部前面の衣服圧測定結果を示す図であり、図13は、衣服圧測定装置100を用いてガードルを着用させた場合の臀部外側の衣服圧測定結果を示す図である。破線はダミー40を使用して測定した衣服圧測定結果を示し、実線は、40代の被験者の平均値を示している。測定に使用した歩行速度は、ダミー40の場合も、被験者の場合もいずれも1.4m/秒であった。ダミー40を用いた場合も、被験者の場合に近い値の衣服圧測定結果が得られていることがわかる。
【0065】
以上説明したように、本発明の好ましい実施の形態では、骨格部としての人体骨格標本50と、骨格部を取り包む弾性部としての弾性部材42、44、46を備え、弾性部材42より変化量の大きい弾性部材44を弾性部材42の表面に配置し、弾性部材42より硬い弾性部材46を弾性部材42の内部に配置しているので、人体と近い硬さおよび変化量分布とすることができ、衣服圧の測定値を、より人体に近い測定値とすることができる。
【0066】
また、骨格部としての人体骨格標本50を取り包んでいるのは、剛体ではなく、弾性部材42、44、46なので、動作が可能なダミーとすることができ、人体に似せた動作をさせることができるようになる。
【0067】
また、ダミー40の表面、すなわち、弾性部材42や44の表面にセンサ70をとりつけているので、衣服圧、ここでは、衣服により、ダミー40の表面、すなわち、弾性部材42や44の表面が受ける圧迫力を測定することができる。
【0068】
取り付け具66に駆動装置300を取り付けることにより、歩行動作を模擬した動作をさせることができ、長時間の着用での衣服圧の変化や、衣服の人体への馴染みや食い込みを含めた測定ができるようになる。
【0069】
なお、上記実施の形態では、弾性部材42、44、46としてウレタン樹脂を使用したが、ウレタン樹脂に代えて、シリコーン樹脂、ゲル化樹脂等を使用してもよい。また、上記実施の形態では、弾性部材の硬さを、40代女性を一例にして作成したが、年代(20代、30代等)や性別、さらにスポーツ選手などそれぞれの人体硬さ分布にあわせて、弾性部材の硬さ等を適宜に変更して作成することができる。例えば、20代女性であれば、弾性部材の硬さを30代よりも硬め(例えば腹部、臀部において、硬さ30%程度の範囲のウレタン樹脂と、その外側には硬さ35%程度の範囲のウレタン樹脂にてダミーを作成したり、30代女性であれば、弾性部材の硬さを40代よりも硬め(例えば腹部、臀部において硬さ28%程度の範囲のウレタン樹脂と、その外側には硬さ32%程度の範囲のウレタン樹脂にてダミーを作成することができる。スポーツ選手であれば、通常発達した筋肉を有することを考慮し、より硬めに設定するとよい。
【0070】
以上、本発明の種々の典型的な実施の形態を説明してきたが、本発明はそれらの実施の形態に限定されない。従って、本発明の範囲は、次の特許請求の範囲によってのみ限定されるものである。
【符号の説明】
【0071】
40 ダミー
42 弾性部材
44 弾性部材
46 弾性部材
48 可動用超ゲル化樹脂
50 人体骨格標本
52 骨盤骨
54 大腿骨
56 転子点
60 大腿骨補強金具
62、64 自重垂れ防止セパレータ
66 取り付け具
70 センサ
72 チューブ
100 衣服圧測定装置
200 コントローラ
232 ディスプレイ
234 タッチパネル
300 駆動装置
【特許請求の範囲】
【請求項1】
骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、
を備える人体模型。
【請求項2】
前記弾性部の表面に設けられた圧力センサをさらに備える請求項1記載の人体模型。
【請求項3】
前記弾性部は、人体の硬さ分布に則して前記第1乃至第3の弾性部材が配置されている請求項1または2記載の人体模型。
【請求項4】
前記骨格部は、関節部と、前記関節部の両側の第1および第2の骨格部材と、を有している請求項1〜3のいずれか1項に記載の人体模型。
【請求項5】
前記骨格部は、人体骨格標本である請求項1〜4のいずれか1項に記載の人体模型。
【請求項6】
前記人体骨格標本に取り付けられた自重垂れ防止セパレータをさらに備える請求項5記載の人体模型。
【請求項7】
前記人体骨格標本に設けられた補強金具をさらに備える請求項5または6記載の人体模型。
【請求項8】
前記人体骨格標本の関節部を補強する補強部材をさらに備える請求項5〜7のいずれか1項に記載の人体模型。
【請求項9】
前記骨格部は、腰部と、大腿部と、前記腰部と前記大腿部とをつなぐ関節部とを有し、前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている請求項1〜8のいずれか1項に記載の人体模型。
【請求項10】
前記第3の弾性部材は、横長の楕円柱形状である請求項9記載の人体模型。
【請求項11】
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサとを備える人体模型と、
前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置と、
前記駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するように、前記駆動装置および前記圧力センサを制御する制御手段と、
を備える衣服圧測定装置。
【請求項12】
表示手段をさらに備え、
前記制御部は、前記圧力測定データをデータ処理して、データ処理されたデータを前記表示手段に表示するように前記表示手段を制御する請求項11記載の衣服圧測定装置。
【請求項13】
前記駆動装置は、前記第2の骨格部材が前記間接部の回りに揺動する面と平行な面内で互いに直交する2方向にそれぞれ直線運動する直線運動機構を備える請求項11または12記載の衣服圧測定装置。
【請求項14】
前記第1の骨格部材は腰部であり、前記第2の骨格部材は大腿部であり、前記関節部は、前記腰部と前記大腿部とをつなぐ関節部である請求項11〜13のいずれか1項に記載の衣服圧測定装置。
【請求項15】
前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている請求項11〜14のいずれか1項に記載の衣服圧測定装置。
【請求項16】
入力手段をさらに備え、
前記制御部は、前記入力手段による制御データを受け付け、前記受け付けた制御データに基づいて前記駆動装置を駆動するように前記入力手段および前記駆動装置を制御する請求項11〜15のいずれか1項に記載の衣服圧測定装置。
【請求項17】
前記制御データは歩行速度である請求項16記載の衣服圧測定装置。
【請求項18】
コンピュータが、
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサと、を備え、衣服が着用された人体模型の、前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するステップを備える衣服圧測定方法。
【請求項1】
骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、
を備える人体模型。
【請求項2】
前記弾性部の表面に設けられた圧力センサをさらに備える請求項1記載の人体模型。
【請求項3】
前記弾性部は、人体の硬さ分布に則して前記第1乃至第3の弾性部材が配置されている請求項1または2記載の人体模型。
【請求項4】
前記骨格部は、関節部と、前記関節部の両側の第1および第2の骨格部材と、を有している請求項1〜3のいずれか1項に記載の人体模型。
【請求項5】
前記骨格部は、人体骨格標本である請求項1〜4のいずれか1項に記載の人体模型。
【請求項6】
前記人体骨格標本に取り付けられた自重垂れ防止セパレータをさらに備える請求項5記載の人体模型。
【請求項7】
前記人体骨格標本に設けられた補強金具をさらに備える請求項5または6記載の人体模型。
【請求項8】
前記人体骨格標本の関節部を補強する補強部材をさらに備える請求項5〜7のいずれか1項に記載の人体模型。
【請求項9】
前記骨格部は、腰部と、大腿部と、前記腰部と前記大腿部とをつなぐ関節部とを有し、前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている請求項1〜8のいずれか1項に記載の人体模型。
【請求項10】
前記第3の弾性部材は、横長の楕円柱形状である請求項9記載の人体模型。
【請求項11】
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、
前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサとを備える人体模型と、
前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置と、
前記駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するように、前記駆動装置および前記圧力センサを制御する制御手段と、
を備える衣服圧測定装置。
【請求項12】
表示手段をさらに備え、
前記制御部は、前記圧力測定データをデータ処理して、データ処理されたデータを前記表示手段に表示するように前記表示手段を制御する請求項11記載の衣服圧測定装置。
【請求項13】
前記駆動装置は、前記第2の骨格部材が前記間接部の回りに揺動する面と平行な面内で互いに直交する2方向にそれぞれ直線運動する直線運動機構を備える請求項11または12記載の衣服圧測定装置。
【請求項14】
前記第1の骨格部材は腰部であり、前記第2の骨格部材は大腿部であり、前記関節部は、前記腰部と前記大腿部とをつなぐ関節部である請求項11〜13のいずれか1項に記載の衣服圧測定装置。
【請求項15】
前記第1の弾性部材は骨盤骨を埋め込み、前記第2の弾性部材は、腹部および臀部の前記第1の弾性部材の表面に設けられ、前記第3の弾性部材は、大腿骨を埋め込み、前記第1の弾性部材が前記第3の弾性部材を埋め込んで設けられている請求項11〜14のいずれか1項に記載の衣服圧測定装置。
【請求項16】
入力手段をさらに備え、
前記制御部は、前記入力手段による制御データを受け付け、前記受け付けた制御データに基づいて前記駆動装置を駆動するように前記入力手段および前記駆動装置を制御する請求項11〜15のいずれか1項に記載の衣服圧測定装置。
【請求項17】
前記制御データは歩行速度である請求項16記載の衣服圧測定装置。
【請求項18】
コンピュータが、
関節部と、前記関節部の両側の第1および第2の骨格部材とを有する骨格部と、前記骨格部を取り包んで設けられた第1の弾性部材と、前記第1の弾性部材の表面の一部に配置され、前記第1の弾性部材よりも変形量の大きい第2の弾性部材と、前記第1の弾性部材の内部に配置され、前記第1の弾性部材よりも硬い第3の弾性部材と、を有する弾性部と、前記弾性部の表面に設けられた圧力センサと、を備え、衣服が着用された人体模型の、前記第2の骨格部材に取り付けられ、前記第2の骨格部材を前記間接部の回りに揺動させる駆動装置を駆動して前記第2の骨格部材を前記間接部の回りに揺動させ、前記圧力センサからの圧力測定データを取得するステップを備える衣服圧測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−32610(P2013−32610A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−154100(P2012−154100)
【出願日】平成24年7月9日(2012.7.9)
【出願人】(506209422)地方独立行政法人 東京都立産業技術研究センター (134)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成24年7月9日(2012.7.9)
【出願人】(506209422)地方独立行政法人 東京都立産業技術研究センター (134)
[ Back to top ]