
人体装着センサ装置及びそれを含む行動解析監視装置
【課題】本発明は作業者の安否を正確に判断でき、作業者の安全を確保できる人体装着センサ装置及びそれを含む行動解析監視装置を提供することを目的とする。
【解決手段】作業者に装着される人体装着センサ装置であって、該作業者の脈拍数を取得する手段と、該作業者の運動量を取得する手段と、該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、該脈拍数と該運動量と該緊急通報情報を他の端末装置に無線通信する手段とを備えたことを特徴とする。
【解決手段】作業者に装着される人体装着センサ装置であって、該作業者の脈拍数を取得する手段と、該作業者の運動量を取得する手段と、該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、該脈拍数と該運動量と該緊急通報情報を他の端末装置に無線通信する手段とを備えたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業者の安全を監視する人体装着センサ装置及びそれを含む行動解析監視装置に関する。
【背景技術】
【0002】
作業者が工場などにおいて作業する場合には、不慮の接触事故や、器物の落下、有毒ガスの吸引などの様々な危険要因が存在する。また、工場などで巡視点検作業を行う場合も同様である。このような作業者の安全を確保するためには、作業者が正常な状態で作業を継続していることを監視することが望ましい。そこで、作業者に人体装着型の装置を装着させ前述の監視のためのデータ取得を行う場合がある。
【0003】
例えば、病院の患者などのように動きの少ない人体を対象とした安全監視の仕組みに関して特許文献1に開示がある。特許文献1には当該人体の脈拍等の生体情報を計測し異常状態の有無の監視を行う提案がなされている。また、運動者を対象とした脈拍を利用した監視の提案に関しては特許文献3に開示がある。特許文献3には体動成分を除去した脈拍数を算出し作業者の安全の監視を行う提案がなされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−310449号公報
【特許文献2】特開2008−47097号公報
【特許文献3】特開2004−298606号公報
【特許文献4】特開2003−024287号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
工場作業者などが行う作業は、重量物を持ち上げたりする際に人体表面に圧迫が加えられたり、作業中に腕を大きく動かしたりすることによる血流速以上の腕や足の動きにより脈波の測定が困難になる場合が多い。従って脈拍のみで作業者の安否を判断することは困難であるという問題があった。
【0006】
また、作業者に加速度センサを装着させることによって作業者の動き(運動量)を把握し、作業者の安否の判断を行うことも考えられる。この場合には、作業者が横になると、就寝しているのか、卒中(あるいは不慮の事故等)により転倒したのか判断できず、作業者の安否を判断することが困難であるという問題があった。
【0007】
本発明は、上述のような課題を解決するためになされたものであって、作業者の安否を正確に判断でき、作業者の安全を確保できる人体装着センサ装置及びそれを含む行動解析監視装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願の発明にかかる人体装着センサ装置は、作業者に装着される人体装着センサ装置であって、
該作業者の脈拍数を取得する手段と、
該作業者の運動量を取得する手段と、
該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、
該脈拍数と該運動量と該緊急通報情報を他の端末装置に無線通信する手段とを備えたことを特徴とする。
【0009】
本願の発明にかかる行動解析監視装置は、
作業者に装着される人体装着センサ装置であって、該作業者の脈拍数を取得する手段と、該作業者の運動量を取得する手段と、該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、該脈拍数と該運動量と該緊急通報情報を他の端末装置に無線通信する手段とを有する人体装着センサ装置と、
該人体装着センサ装置が取得した該脈拍数、該運動量、該緊急通報情報を受信する処理装置とを有し、
該処理装置は、
該作業者の脈拍数の上下限値、および該作業者の運動量の上限値のデータと、
該人体装着センサ装置から受信した該脈拍数が該脈拍数の上下限値を超えるとき、あるいは、該人体装着センサ装置から受信した該運動量が該運動量の上限値を超えるとき、あるいは、該緊急通報情報を受信したときに、その旨を他の端末装置へ送信するか監視者へ通報する手段とを備えたことを特徴とする。
【0010】
本願の発明にかかる行動解析監視装置は、
作業者に装着される人体装着センサ装置であって、該作業者の脈拍数を取得する手段と、該作業者の運動量を取得する手段と、該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、他の人体装着センサ装置との間の距離である人体装着センサ装置間距離を測定する手段と、該脈拍数と該運動量と該緊急通報情報と該人体装着センサ装置間距離を他の端末装置に無線通信する手段とを備えた人体装着センサ装置を複数有し、
該人体装着センサ装置が取得した人体装着センサ装置間距離、該脈拍数、該運動量を受信する処理装置とを備え、
該処理装置は、
該人体装着センサ装置間距離から作業者の姿勢を推定する手段と、
該作業者の姿勢と、該脈拍数と、該運動量とから該作業者の安否を判定する手段と、
該判定の結果、該作業者が安全でないと判断したときにその旨を他の端末装置へ送信するか監視者へ通報する手段とを有することを特徴とする。
【発明の効果】
【0011】
本発明により作業者の状況を把握し、作業の安全の監視ができる。
【図面の簡単な説明】
【0012】
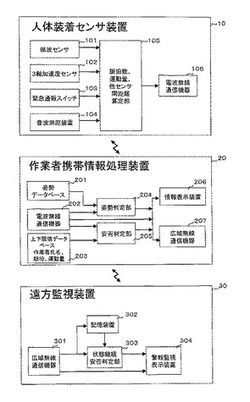
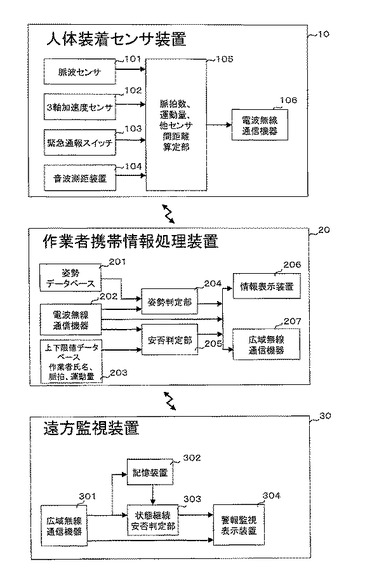
【図1】人体装着センサ装置を含む行動解析監視装置を説明するブロック図である。
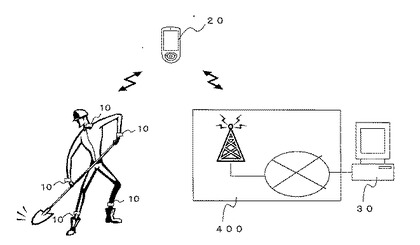
【図2】各装置の実使用時における配置を説明する図である。
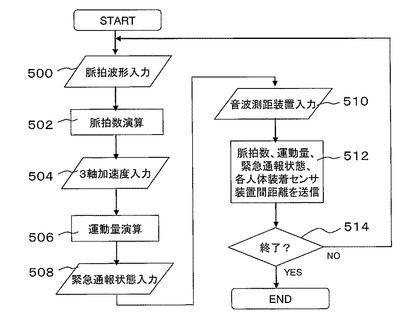
【図3】人体装着センサ装置の処理フローを説明する図である。
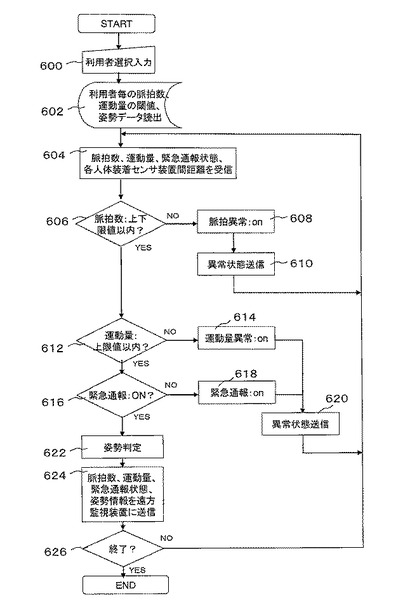
【図4】作業者携帯情報処理装置の処理フローを説明する図である。
【発明を実施するための形態】
【0013】
実施の形態
本実施形態は図1〜4を参照して説明する。本実施形態の説明にあたり、同一材料または同一、対応する構成要素には同一の符号を付して複数回の説明を省略する場合がある。
【0014】
図1は本実施形態の人体装着センサ装置10、作業者携帯情報処理装置20、遠方監視装置30を説明するブロック図である。まず、人体装着センサ装置10について説明する。人体装着センサ装置10は作業者に装着され、作業者の状態を把握するために用いられる装置である。
【0015】
人体装着センサ装置10は、脈波センサ101、3軸加速度センサ102、緊急通報スイッチ103、音波測距装置104を備える。脈波センサ101は作業者の脈拍数を測定するためのデータを取得する。3軸加速度センサ102は作業者の運動量を測定するためのデータを取得する。緊急通報スイッチ103は作業者が緊急事態を通報するために押下する。音波測距装置104は後述する姿勢判定のための、複数の人体装着センサ装置10間の距離(以後、人体装着センサ装置間距離と称する)を測定する。具体的には人体装着センサ装置から発せられた音波が他の人体装着センサ装置に到達するまでの時間が算出される。
【0016】
人体装着センサ装置10は上述に加え、算定部105を備える。算定部105は脈波センサ101、3軸加速度センサ102、緊急通報スイッチ103、音波測距装置104から上述の各データを受け取り、作業者の脈拍数、運動量、人体装着センサ装置間距離を算定する。
【0017】
人体装着センサ装置10はさらに、電波無線通信機器106を備える。電波無線通信機器106は算定部105の出力を他の端末装置に無線通信する部分である。本実施形態の人体装着センサ装置10は上述の構成であり、複数台の人体装着センサ装置10が一人の作業者に装着されるものである。
【0018】
作業者携帯情報処理装置20は、複数台の人体装着センサ装置10から情報を受信する電波情報通信機器202を備える。また、人体装着センサ装置間距離と人体(作業者)の姿勢との関係を持つ姿勢データベース201を備える。姿勢データベースには立つ、しゃがむ、寝転がる、手が頭上にある、両手を広げる等の各状態での作業者の各部分の相対位置の記録がある。一例として作業者が自転車に乗っている場合には、胴部と両手の間隔はほぼ等距離で一定しており、両足は上下、前後方向の円運動となる。姿勢データベース201に格納されるデータは実際の作業者が行う作業について事前に各部分の相対位置がどうなるかを測定し、その結果から構築されていることが好ましい。姿勢判定部204ではこの姿勢データベース201のデータと人体装着センサ装置間距離などから、作業者の現在の姿勢を推定する。
【0019】
作業者携帯情報処理装置20はさらに作業者の氏名およびそれと関連づけられた当該作業者固有の脈拍数の上下限値、運動量の上限値を有する上下限値データベース203を備える。そして、安否判定部205において、電波無線通信機器202で受信した脈拍数、運動量のデータは、そのデータ供給にかかる作業者固有の脈拍数上下限値、運動量上限値を逸脱していないか判断される。
【0020】
安否判定部205において作業者の脈拍数または運動量が上下限データベース202の値を逸脱した場合、または、緊急通報スイッチ103が押下されることによる緊急事態を知らせる緊急通報情報を受信した場合には、安否判定部205から警報が発せられる。そして、その旨が情報表示装置206に表示され、かつ、広域無線通信機器207を経由して遠方監視装置30へ送信される。
【0021】
遠方監視装置30は作業者携帯情報処理装置20からの情報を受信する広域無線通信機器301を備える。ここで受信した情報は状態継続安否判定部303へ伝送され、過去に受信した情報を記憶する記憶装置302のデータと運動量などが比較される。状態継続安否判定部303ではこの比較の結果作業者の状態が一定時間変化していないと判断したときなどに警報を発する。そして、一定時間状態変化がない旨等の警報または、作業者携帯情報処理装置20から送信された警報が警報監視表示装置304へ表示される。
【0022】
図2は本実施形態の各装置の実使用時における配置を説明する図である。同図に記載の通り、作業者12の頸部、両手首部分、両足首部分に人体装着センサ装置10がそれぞれ装着される。この装着にはベルトなどが用いられる。
【0023】
作業者携帯情報処理装置20はスマートフォンと呼ばれる多機能携帯電話を利用する。作業者携帯情報処理装置20には姿勢データベース201と、上下限値データベース203が内部メモリに格納され、姿勢判定部204、安否判定部205はソフトウェアにて実装されている。広域無線通信機器207は、無線LAN又は携帯電話回路網400を利用して通信を行い社内LANに接続されるものである。
【0024】
本実施形態は上述の構成を有する。以後、図3、図4を参照して本実施形態の人体装着センサ装置及びそれを含む行動解析監視装置の動作について説明する。
【0025】
図3は、人体装着センサ装置10で実施される処理を説明するフローチャートである。まず、人体装着センサ装置10に内蔵される脈波センサ101は作業者の人体表面に接するように配置され、人体表面の血流の流れを測定し脈波を計測する(ステップ500)。脈波の計測にはLEDライトを使用し、その反射光を測定する。ここで、外光等の外乱が入ることにより一定以上の入光量となった場合には測定不能と判断する。なお、人体表面の血流量や反射量は個人差があるため、脈波計測には自動ゲイン調整機能を用いることとしてもよい。
【0026】
ステップ500の処理を終えるとステップ502へと処理が進められる。ステップ502では計測された脈波センサ101からのデータが算定部105へ送信され、脈拍数が演算される。
【0027】
ステップ502の処理を終えるとステップ504へと処理が進められる。ステップ504では3軸加速度センサ102により人体装着センサ装置10毎に加速度が測定される。この測定には加速度の方向の測定が含まれる。そして、この測定は各軸ごとに行われる。なお、静止状態では重力加速度を検出する。これは後述する姿勢判定において作業者の上下方向を判定するために用いられる。
【0028】
ステップ504の処理を終えるとステップ506へと処理が進められる。ステップ506では測定された加速度がのデータが算定部105へ送信され、運動量が演算される。
【0029】
ステップ506の処理を終えるとステップ508へと処理が進められる。ステップ508では緊急通報スイッチ103の押下の有無が判定される。緊急通報スイッチ103は作業者が監視者へ緊急事態を通報するために押下するものである。例えば、大型機械等への人体巻き込まれ事故の発生時などには、作業者が緊急通報スイッチを押下する。なお、このスイッチは誤報防止の観点からカバーを設けたり、数秒間の継続押下に押下有りと判定されることが望ましい。ここでいう緊急通報スイッチは感圧スイッチ等を利用して、センサが人体表面から外れた際に緊急事態を通報するものであっても良い。
【0030】
ステップ508の処理を終えるとステップ510へと処理が進められる。ステップ510では音波測距装置104により、前述の通り人体装着センサ装置間距離が測定される。図2を参照して説明した通り、作業者には複数の人体装着センサ装置10が装着される。音波測距装置104は人体装着センサ装置10ごとに固有のIDに結びついた固有の音波を発信する。それぞれの音波測距装置104から発せられる音波は他の音波測距装置104に受信される。音波を受信した音波測距装置104(Aとする)は人体装着センサ装置10固有のIDを付加して送信元(Bとする)へ返信する。そして、BはB−A間の音波の応答時間を計算することで、そのB−A間の距離を計測する。なお、このような人体装着センサ装置間距離の測定は音波を用いることに限られない。どのような測定手段を用いたとしても他の作業者の音波等と干渉しないように、音波測距装置104などの測定手段の測距可能距離長は3m程度以下であることが好ましい。
【0031】
ステップ510の処理を終えるとステップ512へと処理が進められる。ステップ512ではここまでの処理で得られた脈拍数、運動量、緊急通報情報、加速度の方向、人体装着センサ装置間距離が電波無線通信機器106により、作業者携帯情報処理装置20へ送信される。電波無線通信機器106は数秒以下の周期で通信を行う。電波無線通信機器106はBluetoothやZigbeeなどの規格化された通信を利用することが好ましい。
【0032】
ステップ512の処理を終えるとステップ514へと処理が進められる。ステップ514ではルーチンを終了するか否かの判断が行われる。すなわち、人体装着センサ装置10から作業者携帯情報処理装置20への情報の送信を継続する場合には再度ステップ500から処理を行い、継続しない場合には処理を終了する。
【0033】
続いて、作業者携帯情報処理装置20で行われる処理について図4を参照して説明する。図4は、作業者携帯情報処理装置20で実施される処理を説明するフローチャートである。作業者携帯情報処理装置20については、図1、2を参照してある程度説明済みであるため、ここでは処理の流れを記載していく。
【0034】
まず、複数の作業者の中から特定の作業者が選択され、その者の脈拍数の上下限値、運動量の上限値、姿勢データベースのデータの読み出しが行われる(ステップ600、602)。さらに、電波無線通信機器202によって脈拍数、運動量等が受信される(ステップ604)。次いで、受信した脈拍数が上下限値の範囲内か判断(ステップ606)され、また、受信した運動量が上限値を超えるか否かが判断(ステップ608)される。脈拍数の上下限値を超えている場合または、運動量の上限値を超えている場合には即座にその旨が情報表示装置206に表示され、かつ、その旨が広域無線通信機器207を経由して遠方監視装置30へ送信される(ステップ608、610、612、614、620、624)。
【0035】
同様に緊急通報情報を受信した場合にも、作業者が緊急事態を知らせているのであるからその旨が情報表示装置206に表示され、かつ、その旨が広域無線通信機器207を経由して遠方監視装置30へ送信される(ステップ616、618、620、624)。ここで、情報表示装置206は画面による表示のみでなく、音声や振動といった方法により異常を周知することとしてもよい。安否判定部205などでは上述の処理が行われる。
【0036】
姿勢判定部204では上述の姿勢データベース201のデータと、人体装着センサ装置間距離および加速度センサ102の加速度の向きとが対比される。そして、姿勢判定部204は姿勢データベース201のデータと近似する複数の作業者の姿勢を推定する。この推定は、単一の姿勢を選定するのであってもよいが、本実施形態では複数の姿勢について一致度を求める。例えば、自転車の例では、座っている姿勢該当率80%、自転車に乗っている姿勢該当率90%、両手が前方で操作している姿勢該当率30%といったような推定結果が得られる。
【0037】
上述の推定の結果は広域無線通信回線207を経由して遠方監視装置30へ送信される(ステップ624)。そして、遠方監視装置30への送信を継続するか判定され(ステップ626)継続しない場合には処理を終了する。
【0038】
遠方監視装置30の広域無線通信機器301は安否判定部205および姿勢判定部204からの情報を受信する。そして、受信した各値は時系列順に記憶装置302へ記憶される。状態継続安否判定部303では上述の通り作業者の状態が一定時間変化しない場合に異常と判断し、警報監視表示装置304へ警報を表示する。ところで、この異常との判断は、例えば作業者の姿勢が一定時間変化しない場合、寝転がった状態が継続し、かつ、作業者の手の運動量がない場合、脈拍数が一定時間継続的に上昇している場合などに行われる。この判断は作業者の携わる作業の内容、業種などにより異なる。
【0039】
本実施形態では、遠方監視装置30の警報監視表示装置304には、緊急通報スイッチ103が押下された場合、安否判定部205および状態継続安否判定部303で異常と判断された場合にはその旨が即座に反映される。このような人体装着センサ装置10、作業者携帯情報処理装置20、遠方監視装置30を備える行動解析監視装置 により作業者の安全を監視する監視者は、正確に作業者の状態を把握し適切な対応をとることが可能となる。このような監視を継続するためには作業者の各情報は10秒〜1分程度の周期で定期的に更新されることが望ましい。
【0040】
このように本発明では、作業者の脈拍数と運動量のデータの両方を利用して作業者の安全確認を行う。すなわち、作業者の動作により作業時の脈拍数の取得が困難な場合でも運動量により作業者の安全を確認できる。一方、例えば休憩時などにおいて作業者の動きがほとんど無い状態でも、脈拍数により作業者の安全を確認できる。さらに、作業者自身が緊急事態を通報するために押下できる緊急通報スイッチ103を備える。これらに加えて、音波測距装置104および加速度センサ102の加速度の向きの情報から作業者の姿勢を推定する姿勢判定部(204)を備える。そして、必要に応じて作業内容を参酌して、その姿勢が異常であるか、その姿勢を継続することが異常であるかが判定され安否確認に役立てられる。本発明はこのように作業者の状態を多角的に把握することで、作業者の安全の監視を万全とすることができる。
【0041】
本実施形態においては、作業者が一人の場合を想定したが、本発明によれば複数作業者に人体装着センサ装置を装着させることで、複数作業者の同時監視が可能である。
【0042】
本実施形態においては、図3、4でそれぞれ人体装着センサ装置10、作業者携帯情報処理装置20の処理フローについて説明したが本発明の特徴を失わない限りこの処理フローに限定されない。
【0043】
本実施形態の作業者携帯情報処理装置20は、作業者の設定により人体装着センサ装置間距離の情報又は安否判定部205の結果の一部若しくは全部を遠方監視装置30へ送信しないことが可能なこととしても良い。作業者携帯情報処理装置20の情報表示装置206の監視のみによって作業者の監視を行う場合も想定されるからである。
【0044】
本実施形態の安否判定部では作業者ごとに異なる上下限値に基づいて安否判定が行われたが、その必要の無い場合には一律の上下限値に基づいて安否判定を行ってもよい。
【符号の説明】
【0045】
10 人体装着センサ装置、 20 作業者携帯情報処理装置、 30 遠方監視装置、 101 脈波センサ、 102 3軸加速度センサ、 103 緊急通報スイッチ、 104 音波測距装置、 105 算定部、 106 電波無線通信機器、 201 姿勢データベース、 203 上下限値データベース、 204 姿勢判定部、 205 安否判定部、 302 記憶装置、 303 状態継続安否判定部
【技術分野】
【0001】
本発明は、作業者の安全を監視する人体装着センサ装置及びそれを含む行動解析監視装置に関する。
【背景技術】
【0002】
作業者が工場などにおいて作業する場合には、不慮の接触事故や、器物の落下、有毒ガスの吸引などの様々な危険要因が存在する。また、工場などで巡視点検作業を行う場合も同様である。このような作業者の安全を確保するためには、作業者が正常な状態で作業を継続していることを監視することが望ましい。そこで、作業者に人体装着型の装置を装着させ前述の監視のためのデータ取得を行う場合がある。
【0003】
例えば、病院の患者などのように動きの少ない人体を対象とした安全監視の仕組みに関して特許文献1に開示がある。特許文献1には当該人体の脈拍等の生体情報を計測し異常状態の有無の監視を行う提案がなされている。また、運動者を対象とした脈拍を利用した監視の提案に関しては特許文献3に開示がある。特許文献3には体動成分を除去した脈拍数を算出し作業者の安全の監視を行う提案がなされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−310449号公報
【特許文献2】特開2008−47097号公報
【特許文献3】特開2004−298606号公報
【特許文献4】特開2003−024287号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
工場作業者などが行う作業は、重量物を持ち上げたりする際に人体表面に圧迫が加えられたり、作業中に腕を大きく動かしたりすることによる血流速以上の腕や足の動きにより脈波の測定が困難になる場合が多い。従って脈拍のみで作業者の安否を判断することは困難であるという問題があった。
【0006】
また、作業者に加速度センサを装着させることによって作業者の動き(運動量)を把握し、作業者の安否の判断を行うことも考えられる。この場合には、作業者が横になると、就寝しているのか、卒中(あるいは不慮の事故等)により転倒したのか判断できず、作業者の安否を判断することが困難であるという問題があった。
【0007】
本発明は、上述のような課題を解決するためになされたものであって、作業者の安否を正確に判断でき、作業者の安全を確保できる人体装着センサ装置及びそれを含む行動解析監視装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願の発明にかかる人体装着センサ装置は、作業者に装着される人体装着センサ装置であって、
該作業者の脈拍数を取得する手段と、
該作業者の運動量を取得する手段と、
該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、
該脈拍数と該運動量と該緊急通報情報を他の端末装置に無線通信する手段とを備えたことを特徴とする。
【0009】
本願の発明にかかる行動解析監視装置は、
作業者に装着される人体装着センサ装置であって、該作業者の脈拍数を取得する手段と、該作業者の運動量を取得する手段と、該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、該脈拍数と該運動量と該緊急通報情報を他の端末装置に無線通信する手段とを有する人体装着センサ装置と、
該人体装着センサ装置が取得した該脈拍数、該運動量、該緊急通報情報を受信する処理装置とを有し、
該処理装置は、
該作業者の脈拍数の上下限値、および該作業者の運動量の上限値のデータと、
該人体装着センサ装置から受信した該脈拍数が該脈拍数の上下限値を超えるとき、あるいは、該人体装着センサ装置から受信した該運動量が該運動量の上限値を超えるとき、あるいは、該緊急通報情報を受信したときに、その旨を他の端末装置へ送信するか監視者へ通報する手段とを備えたことを特徴とする。
【0010】
本願の発明にかかる行動解析監視装置は、
作業者に装着される人体装着センサ装置であって、該作業者の脈拍数を取得する手段と、該作業者の運動量を取得する手段と、該作業者が緊急事態を知らせる緊急通報情報を取得する手段と、他の人体装着センサ装置との間の距離である人体装着センサ装置間距離を測定する手段と、該脈拍数と該運動量と該緊急通報情報と該人体装着センサ装置間距離を他の端末装置に無線通信する手段とを備えた人体装着センサ装置を複数有し、
該人体装着センサ装置が取得した人体装着センサ装置間距離、該脈拍数、該運動量を受信する処理装置とを備え、
該処理装置は、
該人体装着センサ装置間距離から作業者の姿勢を推定する手段と、
該作業者の姿勢と、該脈拍数と、該運動量とから該作業者の安否を判定する手段と、
該判定の結果、該作業者が安全でないと判断したときにその旨を他の端末装置へ送信するか監視者へ通報する手段とを有することを特徴とする。
【発明の効果】
【0011】
本発明により作業者の状況を把握し、作業の安全の監視ができる。
【図面の簡単な説明】
【0012】
【図1】人体装着センサ装置を含む行動解析監視装置を説明するブロック図である。
【図2】各装置の実使用時における配置を説明する図である。
【図3】人体装着センサ装置の処理フローを説明する図である。
【図4】作業者携帯情報処理装置の処理フローを説明する図である。
【発明を実施するための形態】
【0013】
実施の形態
本実施形態は図1〜4を参照して説明する。本実施形態の説明にあたり、同一材料または同一、対応する構成要素には同一の符号を付して複数回の説明を省略する場合がある。
【0014】
図1は本実施形態の人体装着センサ装置10、作業者携帯情報処理装置20、遠方監視装置30を説明するブロック図である。まず、人体装着センサ装置10について説明する。人体装着センサ装置10は作業者に装着され、作業者の状態を把握するために用いられる装置である。
【0015】
人体装着センサ装置10は、脈波センサ101、3軸加速度センサ102、緊急通報スイッチ103、音波測距装置104を備える。脈波センサ101は作業者の脈拍数を測定するためのデータを取得する。3軸加速度センサ102は作業者の運動量を測定するためのデータを取得する。緊急通報スイッチ103は作業者が緊急事態を通報するために押下する。音波測距装置104は後述する姿勢判定のための、複数の人体装着センサ装置10間の距離(以後、人体装着センサ装置間距離と称する)を測定する。具体的には人体装着センサ装置から発せられた音波が他の人体装着センサ装置に到達するまでの時間が算出される。
【0016】
人体装着センサ装置10は上述に加え、算定部105を備える。算定部105は脈波センサ101、3軸加速度センサ102、緊急通報スイッチ103、音波測距装置104から上述の各データを受け取り、作業者の脈拍数、運動量、人体装着センサ装置間距離を算定する。
【0017】
人体装着センサ装置10はさらに、電波無線通信機器106を備える。電波無線通信機器106は算定部105の出力を他の端末装置に無線通信する部分である。本実施形態の人体装着センサ装置10は上述の構成であり、複数台の人体装着センサ装置10が一人の作業者に装着されるものである。
【0018】
作業者携帯情報処理装置20は、複数台の人体装着センサ装置10から情報を受信する電波情報通信機器202を備える。また、人体装着センサ装置間距離と人体(作業者)の姿勢との関係を持つ姿勢データベース201を備える。姿勢データベースには立つ、しゃがむ、寝転がる、手が頭上にある、両手を広げる等の各状態での作業者の各部分の相対位置の記録がある。一例として作業者が自転車に乗っている場合には、胴部と両手の間隔はほぼ等距離で一定しており、両足は上下、前後方向の円運動となる。姿勢データベース201に格納されるデータは実際の作業者が行う作業について事前に各部分の相対位置がどうなるかを測定し、その結果から構築されていることが好ましい。姿勢判定部204ではこの姿勢データベース201のデータと人体装着センサ装置間距離などから、作業者の現在の姿勢を推定する。
【0019】
作業者携帯情報処理装置20はさらに作業者の氏名およびそれと関連づけられた当該作業者固有の脈拍数の上下限値、運動量の上限値を有する上下限値データベース203を備える。そして、安否判定部205において、電波無線通信機器202で受信した脈拍数、運動量のデータは、そのデータ供給にかかる作業者固有の脈拍数上下限値、運動量上限値を逸脱していないか判断される。
【0020】
安否判定部205において作業者の脈拍数または運動量が上下限データベース202の値を逸脱した場合、または、緊急通報スイッチ103が押下されることによる緊急事態を知らせる緊急通報情報を受信した場合には、安否判定部205から警報が発せられる。そして、その旨が情報表示装置206に表示され、かつ、広域無線通信機器207を経由して遠方監視装置30へ送信される。
【0021】
遠方監視装置30は作業者携帯情報処理装置20からの情報を受信する広域無線通信機器301を備える。ここで受信した情報は状態継続安否判定部303へ伝送され、過去に受信した情報を記憶する記憶装置302のデータと運動量などが比較される。状態継続安否判定部303ではこの比較の結果作業者の状態が一定時間変化していないと判断したときなどに警報を発する。そして、一定時間状態変化がない旨等の警報または、作業者携帯情報処理装置20から送信された警報が警報監視表示装置304へ表示される。
【0022】
図2は本実施形態の各装置の実使用時における配置を説明する図である。同図に記載の通り、作業者12の頸部、両手首部分、両足首部分に人体装着センサ装置10がそれぞれ装着される。この装着にはベルトなどが用いられる。
【0023】
作業者携帯情報処理装置20はスマートフォンと呼ばれる多機能携帯電話を利用する。作業者携帯情報処理装置20には姿勢データベース201と、上下限値データベース203が内部メモリに格納され、姿勢判定部204、安否判定部205はソフトウェアにて実装されている。広域無線通信機器207は、無線LAN又は携帯電話回路網400を利用して通信を行い社内LANに接続されるものである。
【0024】
本実施形態は上述の構成を有する。以後、図3、図4を参照して本実施形態の人体装着センサ装置及びそれを含む行動解析監視装置の動作について説明する。
【0025】
図3は、人体装着センサ装置10で実施される処理を説明するフローチャートである。まず、人体装着センサ装置10に内蔵される脈波センサ101は作業者の人体表面に接するように配置され、人体表面の血流の流れを測定し脈波を計測する(ステップ500)。脈波の計測にはLEDライトを使用し、その反射光を測定する。ここで、外光等の外乱が入ることにより一定以上の入光量となった場合には測定不能と判断する。なお、人体表面の血流量や反射量は個人差があるため、脈波計測には自動ゲイン調整機能を用いることとしてもよい。
【0026】
ステップ500の処理を終えるとステップ502へと処理が進められる。ステップ502では計測された脈波センサ101からのデータが算定部105へ送信され、脈拍数が演算される。
【0027】
ステップ502の処理を終えるとステップ504へと処理が進められる。ステップ504では3軸加速度センサ102により人体装着センサ装置10毎に加速度が測定される。この測定には加速度の方向の測定が含まれる。そして、この測定は各軸ごとに行われる。なお、静止状態では重力加速度を検出する。これは後述する姿勢判定において作業者の上下方向を判定するために用いられる。
【0028】
ステップ504の処理を終えるとステップ506へと処理が進められる。ステップ506では測定された加速度がのデータが算定部105へ送信され、運動量が演算される。
【0029】
ステップ506の処理を終えるとステップ508へと処理が進められる。ステップ508では緊急通報スイッチ103の押下の有無が判定される。緊急通報スイッチ103は作業者が監視者へ緊急事態を通報するために押下するものである。例えば、大型機械等への人体巻き込まれ事故の発生時などには、作業者が緊急通報スイッチを押下する。なお、このスイッチは誤報防止の観点からカバーを設けたり、数秒間の継続押下に押下有りと判定されることが望ましい。ここでいう緊急通報スイッチは感圧スイッチ等を利用して、センサが人体表面から外れた際に緊急事態を通報するものであっても良い。
【0030】
ステップ508の処理を終えるとステップ510へと処理が進められる。ステップ510では音波測距装置104により、前述の通り人体装着センサ装置間距離が測定される。図2を参照して説明した通り、作業者には複数の人体装着センサ装置10が装着される。音波測距装置104は人体装着センサ装置10ごとに固有のIDに結びついた固有の音波を発信する。それぞれの音波測距装置104から発せられる音波は他の音波測距装置104に受信される。音波を受信した音波測距装置104(Aとする)は人体装着センサ装置10固有のIDを付加して送信元(Bとする)へ返信する。そして、BはB−A間の音波の応答時間を計算することで、そのB−A間の距離を計測する。なお、このような人体装着センサ装置間距離の測定は音波を用いることに限られない。どのような測定手段を用いたとしても他の作業者の音波等と干渉しないように、音波測距装置104などの測定手段の測距可能距離長は3m程度以下であることが好ましい。
【0031】
ステップ510の処理を終えるとステップ512へと処理が進められる。ステップ512ではここまでの処理で得られた脈拍数、運動量、緊急通報情報、加速度の方向、人体装着センサ装置間距離が電波無線通信機器106により、作業者携帯情報処理装置20へ送信される。電波無線通信機器106は数秒以下の周期で通信を行う。電波無線通信機器106はBluetoothやZigbeeなどの規格化された通信を利用することが好ましい。
【0032】
ステップ512の処理を終えるとステップ514へと処理が進められる。ステップ514ではルーチンを終了するか否かの判断が行われる。すなわち、人体装着センサ装置10から作業者携帯情報処理装置20への情報の送信を継続する場合には再度ステップ500から処理を行い、継続しない場合には処理を終了する。
【0033】
続いて、作業者携帯情報処理装置20で行われる処理について図4を参照して説明する。図4は、作業者携帯情報処理装置20で実施される処理を説明するフローチャートである。作業者携帯情報処理装置20については、図1、2を参照してある程度説明済みであるため、ここでは処理の流れを記載していく。
【0034】
まず、複数の作業者の中から特定の作業者が選択され、その者の脈拍数の上下限値、運動量の上限値、姿勢データベースのデータの読み出しが行われる(ステップ600、602)。さらに、電波無線通信機器202によって脈拍数、運動量等が受信される(ステップ604)。次いで、受信した脈拍数が上下限値の範囲内か判断(ステップ606)され、また、受信した運動量が上限値を超えるか否かが判断(ステップ608)される。脈拍数の上下限値を超えている場合または、運動量の上限値を超えている場合には即座にその旨が情報表示装置206に表示され、かつ、その旨が広域無線通信機器207を経由して遠方監視装置30へ送信される(ステップ608、610、612、614、620、624)。
【0035】
同様に緊急通報情報を受信した場合にも、作業者が緊急事態を知らせているのであるからその旨が情報表示装置206に表示され、かつ、その旨が広域無線通信機器207を経由して遠方監視装置30へ送信される(ステップ616、618、620、624)。ここで、情報表示装置206は画面による表示のみでなく、音声や振動といった方法により異常を周知することとしてもよい。安否判定部205などでは上述の処理が行われる。
【0036】
姿勢判定部204では上述の姿勢データベース201のデータと、人体装着センサ装置間距離および加速度センサ102の加速度の向きとが対比される。そして、姿勢判定部204は姿勢データベース201のデータと近似する複数の作業者の姿勢を推定する。この推定は、単一の姿勢を選定するのであってもよいが、本実施形態では複数の姿勢について一致度を求める。例えば、自転車の例では、座っている姿勢該当率80%、自転車に乗っている姿勢該当率90%、両手が前方で操作している姿勢該当率30%といったような推定結果が得られる。
【0037】
上述の推定の結果は広域無線通信回線207を経由して遠方監視装置30へ送信される(ステップ624)。そして、遠方監視装置30への送信を継続するか判定され(ステップ626)継続しない場合には処理を終了する。
【0038】
遠方監視装置30の広域無線通信機器301は安否判定部205および姿勢判定部204からの情報を受信する。そして、受信した各値は時系列順に記憶装置302へ記憶される。状態継続安否判定部303では上述の通り作業者の状態が一定時間変化しない場合に異常と判断し、警報監視表示装置304へ警報を表示する。ところで、この異常との判断は、例えば作業者の姿勢が一定時間変化しない場合、寝転がった状態が継続し、かつ、作業者の手の運動量がない場合、脈拍数が一定時間継続的に上昇している場合などに行われる。この判断は作業者の携わる作業の内容、業種などにより異なる。
【0039】
本実施形態では、遠方監視装置30の警報監視表示装置304には、緊急通報スイッチ103が押下された場合、安否判定部205および状態継続安否判定部303で異常と判断された場合にはその旨が即座に反映される。このような人体装着センサ装置10、作業者携帯情報処理装置20、遠方監視装置30を備える行動解析監視装置 により作業者の安全を監視する監視者は、正確に作業者の状態を把握し適切な対応をとることが可能となる。このような監視を継続するためには作業者の各情報は10秒〜1分程度の周期で定期的に更新されることが望ましい。
【0040】
このように本発明では、作業者の脈拍数と運動量のデータの両方を利用して作業者の安全確認を行う。すなわち、作業者の動作により作業時の脈拍数の取得が困難な場合でも運動量により作業者の安全を確認できる。一方、例えば休憩時などにおいて作業者の動きがほとんど無い状態でも、脈拍数により作業者の安全を確認できる。さらに、作業者自身が緊急事態を通報するために押下できる緊急通報スイッチ103を備える。これらに加えて、音波測距装置104および加速度センサ102の加速度の向きの情報から作業者の姿勢を推定する姿勢判定部(204)を備える。そして、必要に応じて作業内容を参酌して、その姿勢が異常であるか、その姿勢を継続することが異常であるかが判定され安否確認に役立てられる。本発明はこのように作業者の状態を多角的に把握することで、作業者の安全の監視を万全とすることができる。
【0041】
本実施形態においては、作業者が一人の場合を想定したが、本発明によれば複数作業者に人体装着センサ装置を装着させることで、複数作業者の同時監視が可能である。
【0042】
本実施形態においては、図3、4でそれぞれ人体装着センサ装置10、作業者携帯情報処理装置20の処理フローについて説明したが本発明の特徴を失わない限りこの処理フローに限定されない。
【0043】
本実施形態の作業者携帯情報処理装置20は、作業者の設定により人体装着センサ装置間距離の情報又は安否判定部205の結果の一部若しくは全部を遠方監視装置30へ送信しないことが可能なこととしても良い。作業者携帯情報処理装置20の情報表示装置206の監視のみによって作業者の監視を行う場合も想定されるからである。
【0044】
本実施形態の安否判定部では作業者ごとに異なる上下限値に基づいて安否判定が行われたが、その必要の無い場合には一律の上下限値に基づいて安否判定を行ってもよい。
【符号の説明】
【0045】
10 人体装着センサ装置、 20 作業者携帯情報処理装置、 30 遠方監視装置、 101 脈波センサ、 102 3軸加速度センサ、 103 緊急通報スイッチ、 104 音波測距装置、 105 算定部、 106 電波無線通信機器、 201 姿勢データベース、 203 上下限値データベース、 204 姿勢判定部、 205 安否判定部、 302 記憶装置、 303 状態継続安否判定部
【特許請求の範囲】
【請求項1】
作業者に装着される人体装着センサ装置であって、
前記作業者の脈拍数を取得する手段と、
前記作業者の運動量を取得する手段と、
前記作業者が緊急事態を知らせる緊急通報情報を取得する手段と、
前記脈拍数と前記運動量と前記緊急通報情報を他の端末装置に無線通信する手段とを備えたことを特徴とする人体装着センサ装置。
【請求項2】
他の人体装着センサ装置との間の距離である人体装着センサ装置間距離を測定する手段と、
前記人体装着センサ装置間距離を前記他の端末装置に無線通信する手段とを備えたことを特徴とする請求項1に記載の人体装着センサ装置。
【請求項3】
請求項1に記載の人体装着センサ装置と、
前記人体装着センサ装置が取得した前記脈拍数、前記運動量、前記緊急通報情報を受信する処理装置とを有し、
前記処理装置は、
前記作業者の脈拍数の上下限値、および前記作業者の運動量の上限値のデータと、
前記人体装着センサ装置から受信した前記脈拍数が前記脈拍数の上下限値を超えるとき、あるいは、前記人体装着センサ装置から受信した前記運動量が前記運動量の上限値を超えるとき、あるいは、前記緊急通報情報を受信したときに、その旨を他の端末装置へ送信するか監視者へ通報する手段とを備えたことを特徴とする行動解析監視装置。
【請求項4】
複数の、請求項2に記載の人体装着センサ装置と、
前記人体装着センサ装置が取得した人体装着センサ装置間距離、前記脈拍数、前記運動量を受信する処理装置とを備え、
前記処理装置は、
前記人体装着センサ装置間距離から作業者の姿勢を推定する手段と、
前記作業者の姿勢と、前記脈拍数と、前記運動量とから前記作業者の安否を判定する手段と、
前記判定の結果、前記作業者が安全でないと判断したときにその旨を他の端末装置へ送信するか監視者へ通報する手段とを有することを特徴とする行動解析監視装置。
【請求項5】
前記作業者の安否を判定する手段は、前記作業者の作業内容ごとに異なる判定基準により判定されることを特徴とする請求項4に記載の行動解析監視装置。
【請求項1】
作業者に装着される人体装着センサ装置であって、
前記作業者の脈拍数を取得する手段と、
前記作業者の運動量を取得する手段と、
前記作業者が緊急事態を知らせる緊急通報情報を取得する手段と、
前記脈拍数と前記運動量と前記緊急通報情報を他の端末装置に無線通信する手段とを備えたことを特徴とする人体装着センサ装置。
【請求項2】
他の人体装着センサ装置との間の距離である人体装着センサ装置間距離を測定する手段と、
前記人体装着センサ装置間距離を前記他の端末装置に無線通信する手段とを備えたことを特徴とする請求項1に記載の人体装着センサ装置。
【請求項3】
請求項1に記載の人体装着センサ装置と、
前記人体装着センサ装置が取得した前記脈拍数、前記運動量、前記緊急通報情報を受信する処理装置とを有し、
前記処理装置は、
前記作業者の脈拍数の上下限値、および前記作業者の運動量の上限値のデータと、
前記人体装着センサ装置から受信した前記脈拍数が前記脈拍数の上下限値を超えるとき、あるいは、前記人体装着センサ装置から受信した前記運動量が前記運動量の上限値を超えるとき、あるいは、前記緊急通報情報を受信したときに、その旨を他の端末装置へ送信するか監視者へ通報する手段とを備えたことを特徴とする行動解析監視装置。
【請求項4】
複数の、請求項2に記載の人体装着センサ装置と、
前記人体装着センサ装置が取得した人体装着センサ装置間距離、前記脈拍数、前記運動量を受信する処理装置とを備え、
前記処理装置は、
前記人体装着センサ装置間距離から作業者の姿勢を推定する手段と、
前記作業者の姿勢と、前記脈拍数と、前記運動量とから前記作業者の安否を判定する手段と、
前記判定の結果、前記作業者が安全でないと判断したときにその旨を他の端末装置へ送信するか監視者へ通報する手段とを有することを特徴とする行動解析監視装置。
【請求項5】
前記作業者の安否を判定する手段は、前記作業者の作業内容ごとに異なる判定基準により判定されることを特徴とする請求項4に記載の行動解析監視装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−218126(P2010−218126A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−63025(P2009−63025)
【出願日】平成21年3月16日(2009.3.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
2.ZIGBEE
【出願人】(501137636)東芝三菱電機産業システム株式会社 (904)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月16日(2009.3.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
2.ZIGBEE
【出願人】(501137636)東芝三菱電機産業システム株式会社 (904)
【Fターム(参考)】
[ Back to top ]