
人分布計測システム及び人分布計測方法
【課題】平面上の人の分布を計測可能な人分布計測システムを提供する。
【解決手段】それぞれ識別可能な電波を送受信する複数の送受信機5A-5L、送受信機5A-5Lの複数の対のそれぞれについて、受信電波の変動をモニタする変動モニタ301、送受信機5A-5Lの複数の対のそれぞれについて、人の存在が電波に与える影響度の平面分布を保存する影響度記憶部402、送受信機5A-5Lの複数の対のそれぞれについて、影響度に電波変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュール302、及び送受信機5A-5Lの複数の対のそれぞれについて算出された存在可能性の分布を足し合わせる足し合わせモジュール303を備える。
【解決手段】それぞれ識別可能な電波を送受信する複数の送受信機5A-5L、送受信機5A-5Lの複数の対のそれぞれについて、受信電波の変動をモニタする変動モニタ301、送受信機5A-5Lの複数の対のそれぞれについて、人の存在が電波に与える影響度の平面分布を保存する影響度記憶部402、送受信機5A-5Lの複数の対のそれぞれについて、影響度に電波変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュール302、及び送受信機5A-5Lの複数の対のそれぞれについて算出された存在可能性の分布を足し合わせる足し合わせモジュール303を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は計測技術に関し、特に人分布計測システム及び人分布計測方法に関する。
【背景技術】
【0002】
室内における人の分布や人数を計測することは、室内の空調を適切に制御するために重要である。また、ビルの管理運用において、室内における人の分布や人数を計測することは、防犯、セキュリティ管理、災害時の避難誘導、及び室内照明制御にとっても重要である。現在、人の分布や人数を計測する方法として、例えば「個別カウント方式」及び「電子タグ方式」が提案されている。
【0003】
「個別カウント方式」においては、部屋の出入口にセンサを設置し、入退室者の人数をカウントすることによって、室内の人数を推定する。しかし、個別カウント方式は、室内の人の分布を計測できない。また子供連れ等でカウントミスが発生し、推定人数に誤差が生じやすいという欠点がある。「電子タグ方式」においては、室内に入る全ての人に電波や光を発信する電子タグを持たせ、電波等の発信位置を特定することにより、室内の人の分布を推定する。しかし、室内に不特定多数の人が出入りする場合には、入室者総てにタグを持たせることは困難である。また、タグの電池交換が煩雑であるという問題もある。
【0004】
そこで、「個別カウント方式」及び「電子タグ方式」の欠点を解決すべく、「画像分析方式」が提案されている(例えば、特許文献1参照。)。「画像分析方式」においては、天井等に監視カメラを設置し、画像を分析して室内の人数分布を推定する。しかし、画像分析方式は複数の監視カメラを必要とし、設置コストが高価であるという問題がある。また、人を撮影するため、プライバシーを侵害するおそれもある。したがって、プライバシーを侵害することなく、室内における人の分布を計測可能な方法が望まれていた。
【特許文献1】特開平11-219437号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、監視カメラに頼ることなく平面上の人の分布を計測可能な人分布計測システム及び人分布計測方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の特徴は、(イ)空間を伝播し、それぞれ識別可能な波を発する、平面上に配置された複数の送信機と、(ロ)波を受信する、平面上に配置された複数の受信機と、(ハ)送信機及び受信機の複数の対のそれぞれについて、受信した波の変動をモニタする変動モニタと、(ニ)送信機及び受信機の複数の対のそれぞれについて、人の存在が波の変動に影響を与える影響度の平面分布を保存する影響度記憶部と、(ホ)送信機及び受信機の複数の対のそれぞれについて、影響度に波の変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュールと、(ヘ)送信機及び受信機の複数の対のそれぞれについて算出された存在可能性の平面分布を足し合わせる足し合わせモジュールと、を備える人分布計測システムであることを要旨とする。本発明の人分布計測システムによれば、波の変動に基づいて人の存在可能性の分布を算出可能であるため、監視カメラを必要とせず、計測対象者のプライバシーを侵害しない。
【0007】
本発明の他の特徴は、(イ)平面上に配置された複数の送信機から、空間を伝播し、それぞれ識別可能な波を発するステップと、(ロ)平面上に配置された複数の受信機で、波を受信するステップと、(ハ)送信機及び受信機の複数の対のそれぞれについて、受信した波の変動をモニタするステップと、(ニ)送信機及び受信機の複数の対のそれぞれについて、予め取得された、人の存在が波の変動に影響を与える影響度の平面分布を用意するステップと、(ホ)送信機及び受信機の複数の対のそれぞれについて、影響度に波の変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出するステップと、(ヘ)送信機及び受信機の複数の対のそれぞれについて算出された存在可能性の平面分布を足し合わせるステップと、を含む人分布計測方法であることを要旨とする。本発明の人分布計測方法によれば、波の変動に基づいて人の存在可能性の分布を算出可能であるため、監視カメラを必要とせず、計測対象者のプライバシーを侵害しない。
【発明の効果】
【0008】
本発明によれば、監視カメラに頼ることなく平面上の人の分布を計測可能な人分布計測システム及び人分布計測方法を提供可能である。
【発明を実施するための最良の形態】
【0009】
以下に本発明の実施の形態を説明する。以下の図面の記載において、同一又は類似の部分には同一又は類似の符号で表している。但し、図面は模式的なものである。したがって、具体的な寸法等は以下の説明を照らし合わせて判断するべきものである。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることは勿論である。
【0010】
(第1の実施の形態)
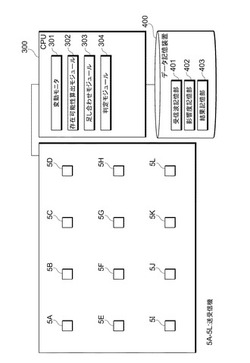
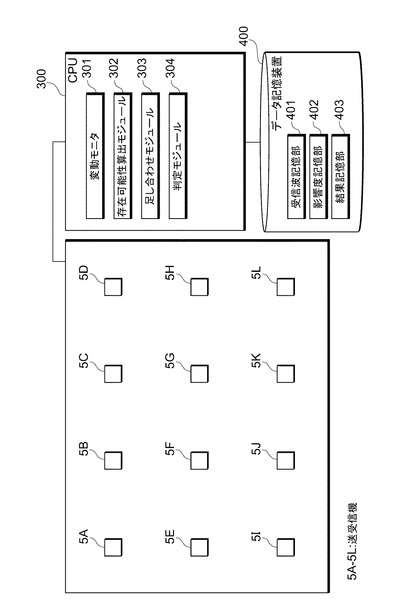
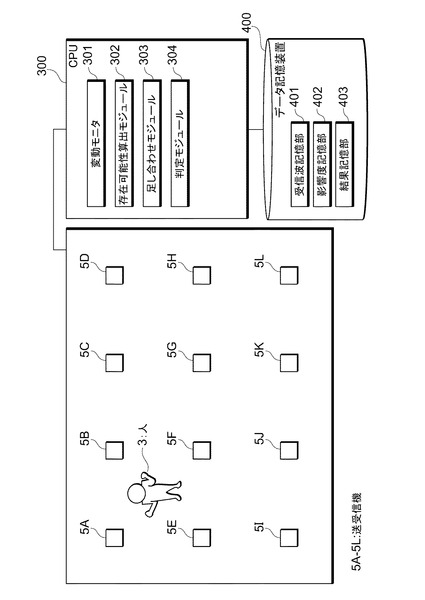
第1の実施の形態に係る人分布計測システムは、図1に示すように、平面上に配置された複数の送受信機5A, 5B, 5C, 5D, 5E, 5F, 5G, 5H, 5I, 5J, 5K, 5Lを備える。複数の送受信機5A-5Lは、それぞれ識別可能な空間を伝播する波を放射し、また、自局以外の他の送受信機5A-5Lから放射された波を受信する。なお、空間を伝播する波とは、電波及び超音波等を指す。以下においては、空間を伝播する波として電波を用いる例を説明する。
【0011】
人分布計測システムは、さらに、複数の送受信機5A-5Lに接続された中央演算処理装置(CPU)300を備える。CPU300は、送受信機5A-5Lの複数の対のそれぞれについて、受信電波の変動をモニタする変動モニタ301を備える。CPU300には、データ記憶装置400が接続されている。データ記憶装置400は、送受信機5A-5Lの複数の対のそれぞれについて、人の存在が電波の変動に影響を与える影響度の平面分布を保存する影響度記憶部402を備える。
【0012】
CPU300は、さらに、送受信機5A-5Lの複数の対のそれぞれについて、影響度に電波の変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュール302、送受信機5A-5Lの複数の対のそれぞれについて算出された存在可能性の分布を足し合わせる足し合わせモジュール303、及び足し合わされた存在可能性の分布において、存在可能性の高い領域に人が存在すると判定する判定モジュール304を備える。
【0013】
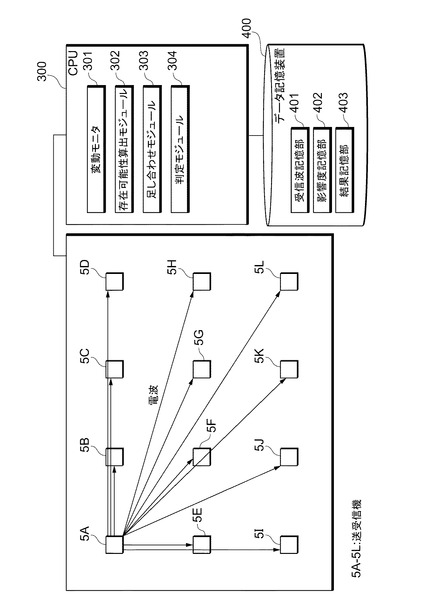
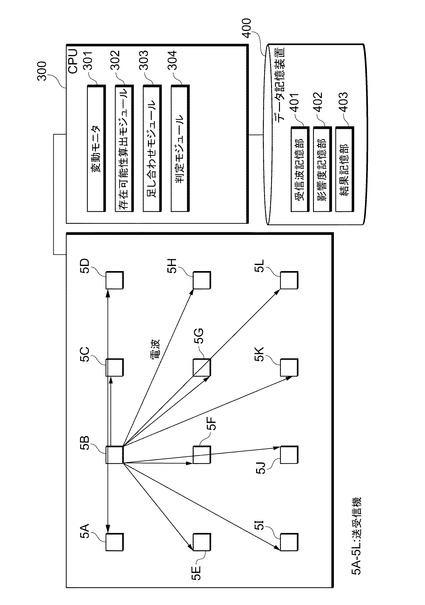
複数の送受信機5A-5Lは、格子状に配置されている。図2に示すように、送受信機5Aが、送受信機5Aから送信されたと識別可能な信号を含む変調波をまず放射する。他の送受信機5B-5Lは、送受信機5Aから放射された電波を受信し、受信した電波の特性を記録する。次に、図3に示すように、送受信機5Bが、送受信機5Bから送信されたと識別可能な信号を含む変調波を放射する。他の送受信機5A, 5C-5Lは、送受信機5Bから放射された電波を受信し、受信した電波の特性を記録する。以後、送受信機5C-5Lが、識別可能な信号を含む変調波を次々と放射し、複数の送受信機5A-5Lは、自局以外の総ての送受信機のそれぞれが発した電波を受信し、特性を記録する。例えば、送受信機5Aは、他の総ての送受信機5B-5Lのそれぞれから放射された識別可能な電波を受信し、特性を記録する。送受信機5Bは、他の総ての送受信機5A, 5C-5Lのそれぞれから放射された識別可能な電波を受信し、特性を記録する。なお、電波の特性とは、例えば電波の強度、位相(周波数)、偏波角及び到来方向等を意味する。
【0014】
複数の送受信機5A-5Lのそれぞれが、自局以外の総ての送受信機が発した電波の特性を記録した場合、複数の送受信機5A-5Lは、記録した電波の特性をCPU300に送信する。送信には、無線通信を用いてもよいし、有線の構内通信網(LAN)を用いてもよい。CPU300は、受信した電波の特性を、データ記憶装置400の受信波記憶部401に保存する。したがって、受信波記憶部401には、複数の送受信機5A-5Lの総ての組み合わせについての受信電波の特性が保存される。以下、送信機としての送受信機i及び受信機としての送受信機jの対における受信電波の特性をSi_jと表す。ここで、iは、5A-5Lのいずれかであり、jは、iと異なる5A-5Lのいずれかである。例えば、送受信機5Aから送信され、送受信機5Bで受信された電波の特性は、S5A_5Bと表される。
【0015】
なお、複数の送受信機5A-5Lのそれぞれにおいて、自局が放射した電波を自局で受信することはできないので、受信波記憶部401に保存される電波の特性Si_jにおいて、i=jとなることはない。また、電波の特性Si_jと電波の特性Sj_iは、通常ほぼ等しくなる。そのため、電波の特性Si_jが取得された場合は、電波の特性Sj_iの取得を省略してもよい。例えば、送受信機5Aから送信され、送受信機5Bで受信された電波の特性S5A_5Bが取得された場合、送受信機5Bから送信され、送受信機5Aで受信される電波の特性S5B_5Aを取得することを省略してもよい。
【0016】
複数の送受信機5A-5Lは、上述した電波の送信及び受信を経時的に繰り返す。そのため、受信波記憶部401には、複数の送受信機5A-5Lの総ての組み合わせについての受信電波の特性Si_jが経時的に記録される。
【0017】
変動モニタ301は、複数の送受信機5A-5Lの総ての組み合わせについて、受信電波の特性Si_jの変動として、例えば振幅の変動を経時的にモニタする。モニタは、例えば1秒毎に実施してもよい。なお、変動モニタ301は、必ずしも受信電波の振幅の変動を直接モニタする必要はなく、受信電波の受信信号強度(RSSI: Received Signal Strength Indicator) の変動等から間接的に受信電波の振幅の変動をモニタすればよい。以下において、受信電波の特性Si_jとして、受信電波の受信信号強度をモニタする例を説明する。
【0018】
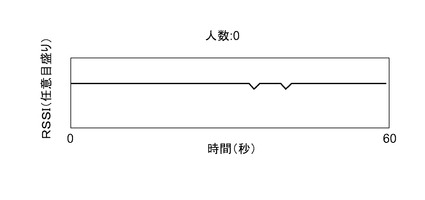
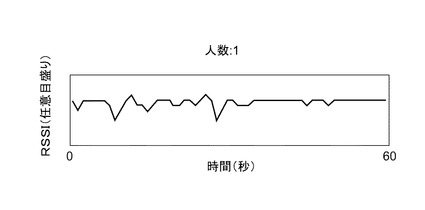
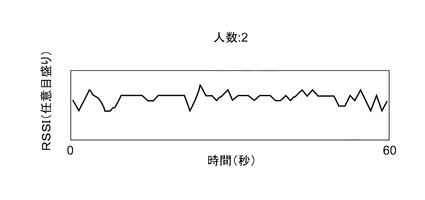
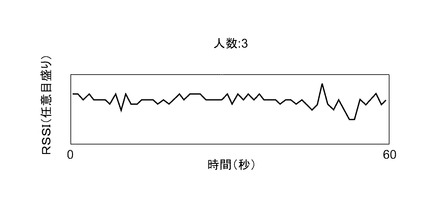
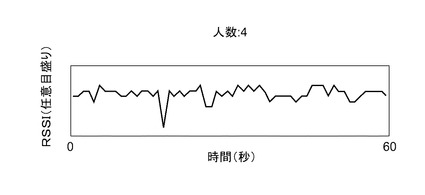
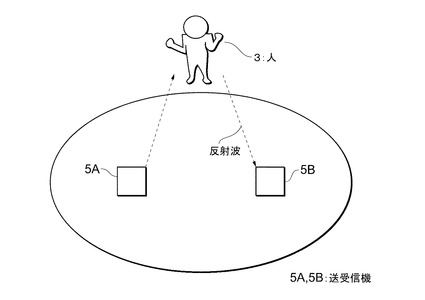
図4は、複数の送受信機5A-5Lが配置された空間に人がいない場合の、受信電波の受信信号強度Si_jの経時変化の例を示す。空間に人がいない場合、受信電波の受信信号強度Si_jはほとんど変動しない。しかし、図5に示すように、送受信機iと送受信機jの間に人が存在しているときは、人が存在していないときと比べて、人による反射のため、受信電波の受信信号強度Si_jに変動が生じる。さらに図6、図7、図8に示すように、存在する人の数が増えるにつれて、受信電波の受信信号強度Si_jも変動する。
【0019】
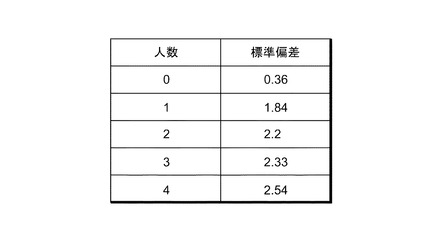
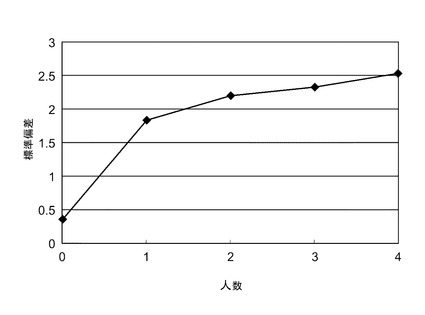
図1に示す変動モニタ301は、さらに、複数の送受信機5A-5Lの総ての組み合わせのそれぞれについて、一定時間内の受信電波の受信信号強度の標準偏差Vi_jを、受信電波の変動の大きさを示す指標として算出する。図9は、空間内に存在する人が0人乃至4人のそれぞれの場合における、変動モニタ301が算出した受信電波の受信信号強度の標準偏差Vi_jの一例である。図10に示すように、空間内に存在する人の数が増加するにつれて、受信電波の受信信号強度の標準偏差Vi_jは増加する。反対に、空間内に存在する人の数が減少するにつれて、受信電波の受信信号強度の標準偏差Vi_jは減少する。なお、図9及び図10に示す標準偏差の単位は、デシベル(dB)である。
【0020】
図1に示す影響度記憶部402は、送受信機iと送受信機jの総ての組み合わせのそれぞれについて、人の存在が受信信号強度の標準偏差Vi_jの増加へ与える影響度wi_jの平面分布を示す影響度分布マップを保存する。例えば、送受信機iと送受信機jの対についての影響度分布マップにおいて、送受信機iと送受信機jの位置を焦点とする楕円の外側の影響度wi_jは0とされ、楕円の内側の影響度wi_jは1とされる。以下、楕円の外周を境界として影響度wi_jが設定される理由について説明する。
【0021】
電波は伝播距離に応じて減衰するため、送受信機5Aから送受信機5Bへ向かう波長λの直接波の伝播距離Ddと直接波の伝播損失係数Ldの関係は、下記(1)式で与えられる。
Ld = (4πDd /λ)2 ・・・(1)
【0022】
また、送受信機5Aから放射され、人で反射され送受信機5Bに到達する波長λの反射波の伝播距離Dr、反射波の伝播損失係数Lr、及び人表面の反射による損失係数Lmの関係は、下記(2)式で与えられる。
Lr = (4πDr/λ)2×Lm ・・・(2)
【0023】
送受信機5Bが受信する受信波は、直接波と反射波の合成波である。そのため、人の存在による反射波の変動が、受信波の変動となる。よって、下記(3)式に示すように、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比が、受信波の変動の比例係数になる。
Lr / Ld = (Dr2×Lm) / Dd2 = (Dr / Dd)2×Lm ・・・(3)
【0024】
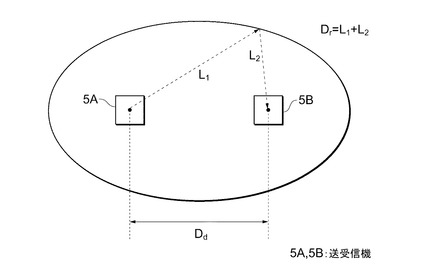
直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比は、直接波の伝播距離Ddに対する反射波の伝播距離Drの比でもある。ここで、反射波の伝播距離Drは、送受信機5Aから人までの電波の伝播距離L1と、人から送受信機5Bまでの電波の伝播距離L2の和である。図11に示すように、平面上において、伝播距離L1と伝播距離L2の和が一定となる点を結ぶと、送受信機5A, 5Bの位置を焦点とする楕円となる。したがって、送受信機5A, 5Bの位置を焦点とする楕円の外周上において、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比は一定となる。
【0025】
これに対し、送受信機5A, 5Bの位置を焦点とする楕円の外側においては、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比が、楕円の外周上と比べて大きくなる。そのため、図12に示すように、送受信機5A, 5Bの位置を焦点とする楕円の外側に人3が存在する場合、反射波の伝播損失が大きく、反射波が直接波に与える影響は小さい。
【0026】
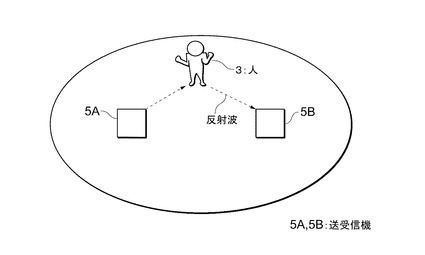
また、送受信機5A, 5Bの位置を焦点とする楕円の内側においては、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比が、楕円の外周上と比べて小さくなる。そのため、図13に示すように、送受信機5A, 5Bの位置を焦点とする楕円の内側に人3が存在する場合、反射波の伝播損失が小さく、反射波が直接波に与える影響は大きい。
【0027】
よって、送受信機5A, 5Bの位置を焦点とする楕円の外側の人3の存在は、送受信機5Aから発せられ、送受信機5Bで受信される電波の受信信号強度の標準偏差V5A_5Bの増加に影響しないが、送受信機5A, 5Bの位置を焦点とする楕円の内側の人3の存在は、受信電波の受信信号強度の標準偏差V5A_5Bの増加に影響するとみなしうる。したがって、図1に示す影響度記憶部402に保存される、送受信機5Aと送受信機5Bの対についての影響度分布マップにおいて、送受信機5A, 5Bの位置を焦点とする楕円の外側の人の存在の影響度w5A_5Bは0とされ、楕円の内側の人の存在の影響度w5A_5Bは1とされる。他の送受信機iと送受信機jの対についての影響度分布マップにおいても、同様である。
【0028】
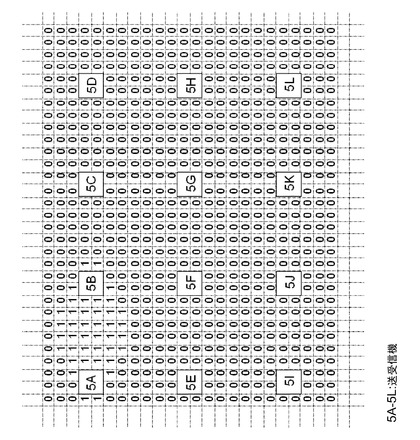
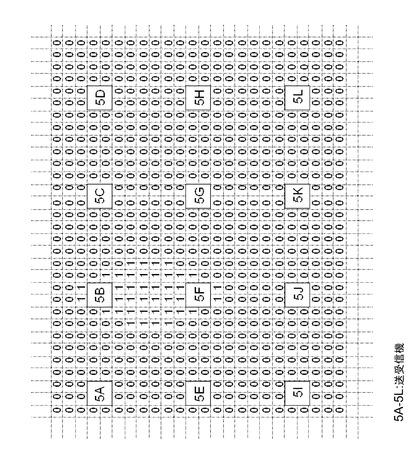
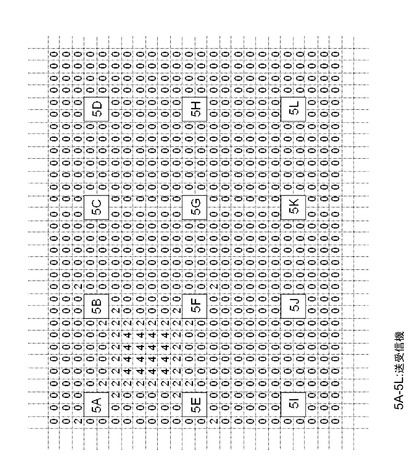
図14は、送受信機5Aと送受信機5Bの対についての影響度分布マップの一例を示す。平面が格子状に分割され、各升目に影響度w5A_5Bが記入されている。ここで、送受信機5Aと送受信機5Bの位置を焦点とする楕円の内側においては、影響度w5A_5Bが1にされている。また、送受信機5Aと送受信機5Bの位置を焦点とする楕円の外側においては、影響度w5A_5Bが0にされている。
【0029】
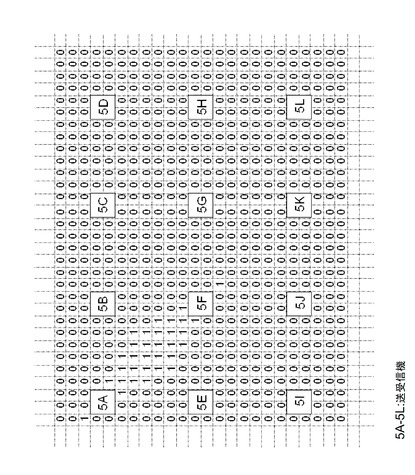
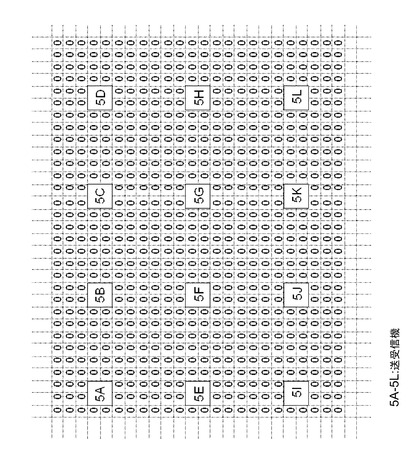
図15は、送受信機5Aと送受信機5Fの対についての影響度分布マップの一例を示す。ここで、送受信機5Aと送受信機5Fの位置を焦点とする楕円の内側においては、影響度w5A_5Fが1にされている。また、送受信機5Aと送受信機5Fの位置を焦点とする楕円の外側においては、影響度w5A_5Fが0にされている。
【0030】
図16は、送受信機5Bと送受信機5Fの対についての影響度分布マップの一例を示す。ここで、送受信機5Bと送受信機5Fの位置を焦点とする楕円の内側においては、影響度w5B_5Fが1にされている。また、送受信機5Bと送受信機5Fの位置を焦点とする楕円の外側においては、影響度w5B_5Fが0にされている。
【0031】
図17は、送受信機5Bと送受信機5Eの対についての影響度分布マップの一例を示す。ここで、送受信機5Bと送受信機5Eの位置を焦点とする楕円の内側においては、影響度w5B_5Eが1にされている。また、送受信機5Bと送受信機5Eの位置を焦点とする楕円の外側においては、影響度w5B_5Eが0にされている。
【0032】
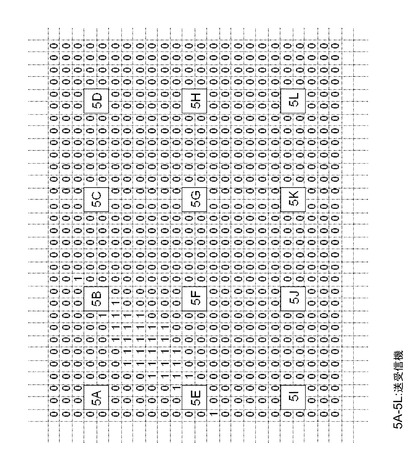
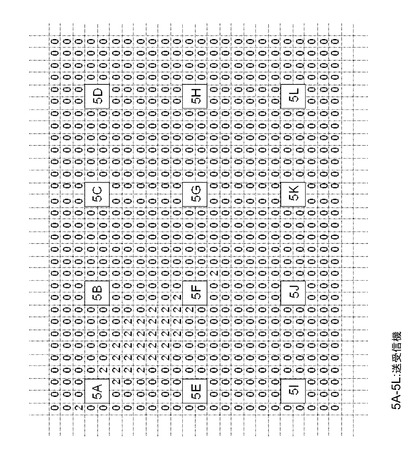
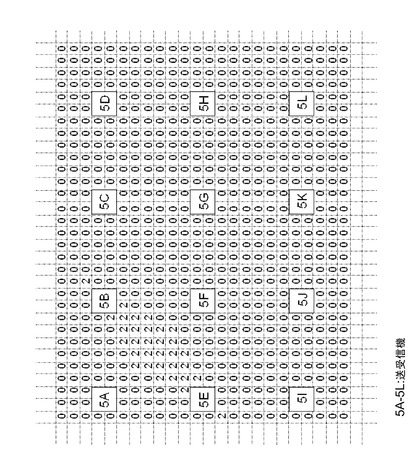
図1に示す存在可能性算出モジュール302は、送受信機iと送受信機jの複数の対のそれぞれについて、影響度分布マップ上の影響度wi_jに、受信電波の信号強度の標準偏差Vi_jを乗じ、人の存在可能性Pi_jの平面分布を示す存在可能性分布マップを生成する。例えば、送受信機5Aと送受信機5Bの対における信号強度の標準偏差V5A_5Bが0であった場合、図14に示す影響度分布マップ上の総ての影響度w5A_5Bに0が掛けられるため、図18に示すように、送受信機5Aと送受信機5Bの対についての存在可能性分布マップ上の存在可能性P5A_5Bは総て0になる。また、例えば、送受信機5Aと送受信機5Fの対における信号強度の標準偏差V5A_5Fが2であった場合、図15に示す影響度分布マップ上の総ての影響度w5A_5Fに2が掛けられ、図19に示すように、送受信機5Aと送受信機5Fの位置を焦点とする楕円の内側において存在可能性P5A_5Fが2と記録され、楕円の外側において存在可能性P5A_5Fが0と記録された、送受信機5Aと送受信機5Fの対についての存在可能性分布マップが生成される。
【0033】
また、例えば、送受信機5Bと送受信機5Fの対における信号強度の標準偏差V5B_5Fが0であった場合、図16に示す影響度分布マップ上の総ての影響度w5B_5Fに0が掛けられるため、送受信機5Bと送受信機5Fの対についての存在可能性分布マップ上の存在可能性P5B_5Fは総て0になる。また、例えば、送受信機5Bと送受信機5Eの対における信号強度の標準偏差V5B_5Eが2であった場合、図17に示す影響度分布マップ上の総ての影響度w5B_5Eに2が掛けられ、図20に示すように、送受信機5Bと送受信機5Eの位置を焦点とする楕円の内側において存在可能性P5B_5Eが2と記録され、楕円の外側において存在可能性P5B_5Eが0と記録された、送受信機5Bと送受信機5Eの対についての存在可能性分布マップが生成される。
【0034】
図1に示す足し合わせモジュール303は、複数の送受信機5A-5Lの総ての組み合わせについての存在可能性分布マップ上の同一座標における存在可能性Pi_jを足し合わせ、足し合わされた存在可能性PSUMの平面分布を示す積算存在可能性分布マップを生成する。例えば、送受信機5Aと送受信機5Fの対についての存在可能性分布マップが図19であり、送受信機5Bと送受信機5Eの対についての存在可能性分布マップが図20であり、その他の総ての送受信機iと送受信機jの対についての存在可能性分布マップが図18であった場合、総ての存在可能性分布マップ上の存在可能性Pi_jが足し合わされ、図21に示す積算存在可能性分布マップが得られる。
【0035】
図1に示す判定モジュール304は、積算存在可能性分布マップ上において、足し合わされた存在可能性PSUMが高い領域に、人が存在すると判定する。例えば、図21に示す積算存在可能性分布マップが得られた場合、送受信機5A, 5B, 5E, 5Fを頂点とする四角形の中心付近の領域において、足し合わされた存在可能性PSUMが4となり、最も高い。この場合、判定モジュール304は、図22に示すように、送受信機5A, 5B, 5E, 5Fを頂点とする四角形の中心付近の領域に、人3が存在すると判定する。
【0036】
また、図9及び図10に示したように、人数の増加によりの受信電波の受信信号強度の標準偏差Vi_jは増加する。したがって、存在可能性PSUMは人数に比例して高くなる。よって判定モジュール304は、存在可能性PSUMが高い領域に、存在可能性PSUMが低い領域と比較して多数の人が存在すると判定してもよい。
【0037】
データ記憶装置400は、結果記憶部403をさらに備える。結果記憶部403には、存在可能性算出モジュール302が生成した存在可能性分布マップ、足し合わせモジュール303が生成した積算存在可能性分布マップ、及び判定モジュール304の判定結果等が保存される。
【0038】
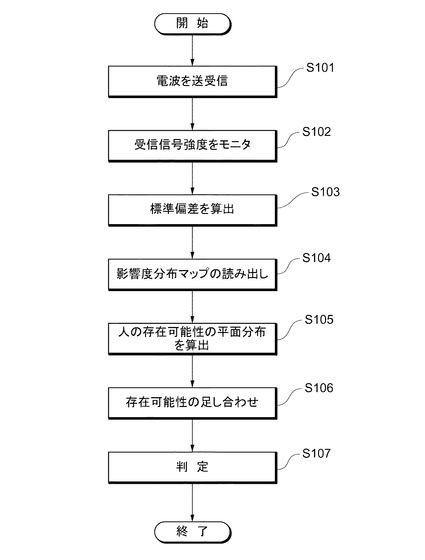
次に第1の実施の形態に係る人分布計測方法を、図23に示すフローチャートを用いて説明する。
(a) ステップS101で、図1に示す複数の送受信機5A-5Lは、それぞれ識別可能な電波を次々と送信する。また、複数の送受信機5A-5Lは、自局以外の送受信機から送信されてきた電波を次々と受信し、受信電波の受信信号強度を記録する。複数の送受信機5A-5Lは、経時的に受信電波の受信信号強度をCPU300に送信し、CPU300は、iを5A-5Lのいずれか、jをiと異なる5A-5Lのいずれかとして、送受信機i及び送受信機jの対における受信電波の受信信号強度Si_jをデータ記憶装置400の受信波記憶部401に経時的に保存する。
【0039】
(b) ステップS102で、変動モニタ301は、受信波記憶部401に経時的に保存される受信信号強度Si_jの変動をモニタする。さらにステップS103で、変動モニタ301は、送受信機i及び送受信機jの対における受信信号強度の標準偏差Vi_jを算出する。次にステップS104で、存在可能性算出モジュール302は、影響度記憶部402から、送受信機iと送受信機jの総ての組み合わせのそれぞれについての影響度分布マップを読み出す。
【0040】
(c) ステップS105で、存在可能性算出モジュール302は、送受信機i及び送受信機jの対についての影響度分布マップ上に記録された人の存在の影響度wi_jに、送受信機i及び送受信機jの対における受信信号強度の標準偏差Vi_jを掛け、存在可能性Pi_jの平面分布を示す存在可能性分布マップを生成する。存在可能性算出モジュール302は、送受信機iと送受信機jの総ての組み合わせのそれぞれについての存在可能性分布マップを、結果記憶部403に保存する。
【0041】
(d) ステップS106で、足し合わせモジュール303は、送受信機iと送受信機jの総ての組み合わせのそれぞれについての存在可能性分布マップを結果記憶部403から読み出す。次に足し合わせモジュール303は、存在可能性分布マップに記録されている同一座標における存在可能性Pi_jを総て足し合わせ、足し合わされた存在可能性PSUMの平面分布を示す積算存在可能性分布マップを生成する。その後、足し合わせモジュール303は、積算存在可能性分布マップを結果記憶部403に保存する。
【0042】
(e) ステップS107で、判定モジュール304は、結果記憶部403から積算存在可能性分布マップを読み出す。次に判定モジュール304は、積算存在可能性分布マップ上において、足し合わされた存在可能性PSUMが高い領域に人が存在すると判定する。その後、判定モジュール304は、人が存在すると判定された領域を結果記憶部403に記録し、第1の実施の形態に係る人分布計測方法を終了する。
【0043】
以上示した第1の実施の形態に係る人分布計測システム及び人分布計測方法によれば、監視カメラを用いずに、平面上の人数分布を把握することが可能になる。そのため、計測対象者のプライバシーが侵害されない。また、電波は天井材質である石膏ボードや木材を透過する性質を利用して、送信機・受信機を天井裏に完全に隠して設置することが可能である。このため監視カメラのように天井の美観を損ねることもない。また、存在可能性分布マップを足し合わせることにより、存在可能性PSUMが高い領域が狭められる。そのため、人の存在位置をより細かく特定することが可能となる。
【0044】
(第1の実施の形態の変形例)
第1の実施の形態においては、影響度分布マップにおいて、送受信機iと送受信機jの位置を焦点とする楕円の外側の影響度wi_jが0とされ、楕円の内側の影響度wi_jが1とされる例を説明した。しかし、影響度wi_jの値は0、1に限定されず、任意に設定可能である。例えば、楕円の外側に向かって影響度wi_jの値を段階的に上昇させ、また楕円の内側に向かって影響度wi_jの値を段階的に低下させてもよい。また、影響度wi_jの境界線として楕円を使用する必要は必ずしもない。例えば人の存在の影響度を平面上で予め実験的に取得し、実験的に取得された影響度の分布を影響度分布マップに記録してもよい。また、視覚的なマップを生成する必要は必ずしもなく、各座標ごとの影響度が記録されていればよい。
【0045】
(第2の実施の形態)
第1の実施の形態に係る人分布計測システムにおいては、図1に示す変動モニタ301が、受信電波の受信信号強度の変動をモニタする例を説明した。これに対し、第2の実施の形態に係る人分布計測システムにおいては、変動モニタ301は、受信電波の周波数分布の変動をモニタする。
【0046】
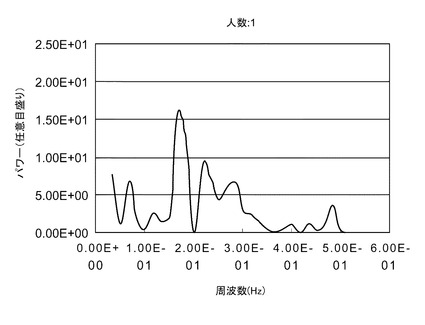
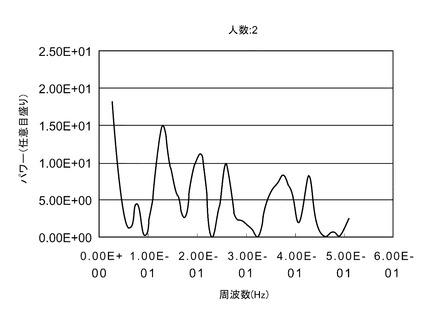
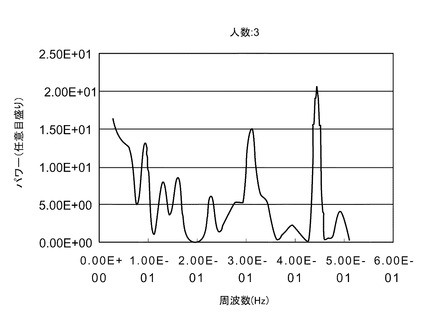
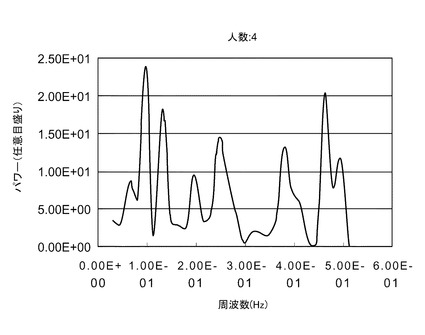
ここで、図24は空間に存在する人の数が1人の場合の周波数のパワースペクトルの例を示し、図25は空間に存在する人の数が2人の場合のパワースペクトルの例を示し、図26は空間に存在する人の数が3人の場合のパワースペクトルの例を示し、図27は空間に存在する人の数が4人の場合のパワースペクトルの例を示す。図24乃至図27に示すように、人数が増加するにつれて、受信電波の高周波成分が増加する。反対に、人数が減少するにつれて、受信電波の高周波成分は減少する。この場合、図1に示す変動モニタ301は、高周波成分の強度を、受信電波の変動の大きさを示す指標として算出する。
【0047】
また、第2の実施の形態においては、存在可能性算出モジュール302は、影響度分布マップ上の影響度wi_jに、送受信機i及び送受信機jの対における受信電波の高周波成分の強度を乗じ、人の存在可能性Pi_jの平面分布を示す存在可能性分布マップを生成する。第2の実施の形態に係る人分布計測システムのその他の構成要素は、第1の実施の形態と同様であるので、説明は省略する。
第2の実施の形態に係る人分布計測システムによっても、監視カメラを用いることなく、平面上の人数分布を高い精度で計測することが可能になる。
【0048】
(その他の実施の形態)
上記のように本発明を実施の形態によって記載したが、この開示の一部をなす記述及び図面はこの発明を限定するものであると理解するべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかになるはずである。
【0049】
例えば、第1の実施の形態において、図1に示す複数の送受信機5A-5Lは格子状に配置されていると説明したが、必ずしも複数の送受信機5A-5Lは格子状に等間隔に配置されている必要はなく、複数の送受信機5A-5Lは適当な間隔で分散して配置されていればよい。また、送受信機を用いた例を示したが、送信機と受信機とを別個に配置してもよいことは勿論である。
【0050】
この様に、本発明はここでは記載していない様々な実施の形態等を包含するということを理解すべきである。したがって、本発明はこの開示から妥当な特許請求の範囲の発明特定事項によってのみ限定されるものである。
【図面の簡単な説明】
【0051】
【図1】本発明の第1の実施の形態に係る人分布計測システムの模式図である。
【図2】本発明の第1の実施の形態に係る送受信機から発せられた電波の経路を示す第1の模式図である。
【図3】本発明の第1の実施の形態に係る送受信機から発せられた電波の経路を示す第2の模式図である。
【図4】本発明の第1の実施の形態に係る電波の受信信号強度を示す第1のグラフである。
【図5】本発明の第1の実施の形態に係る電波の受信信号強度を示す第2のグラフである。
【図6】本発明の第1の実施の形態に係る電波の受信信号強度を示す第3のグラフである。
【図7】本発明の第1の実施の形態に係る電波の受信信号強度を示す第4のグラフである。
【図8】本発明の第1の実施の形態に係る電波の受信信号強度を示す第5のグラフである。
【図9】本発明の第1の実施の形態に係る電波の受信信号強度の標準偏差を示す表である。
【図10】本発明の第1の実施の形態に係る電波の受信信号強度の標準偏差を示すグラフである。
【図11】本発明の第1の実施の形態に係る二つの送受信機の位置を焦点とする楕円の模式図である。
【図12】本発明の第1の実施の形態に係る二つの送受信機の位置を焦点とする楕円と人の存在位置の関係を示す第1の模式図である。
【図13】本発明の第1の実施の形態に係る二つの送受信機の位置を焦点とする楕円と人の存在位置の関係を示す第2の模式図である。
【図14】本発明の第1の実施の形態に係る影響度分布マップを示す第1の模式図である。
【図15】本発明の第1の実施の形態に係る影響度分布マップを示す第2の模式図である。
【図16】本発明の第1の実施の形態に係る影響度分布マップを示す第3の模式図である。
【図17】本発明の第1の実施の形態に係る影響度分布マップを示す第4の模式図である。
【図18】本発明の第1の実施の形態に係る存在可能性分布マップを示す第1の模式図である。
【図19】本発明の第1の実施の形態に係る存在可能性分布マップを示す第2の模式図である。
【図20】本発明の第1の実施の形態に係る存在可能性分布マップを示す第3の模式図である。
【図21】本発明の第1の実施の形態に係る足し合わされた存在可能性分布マップを示す模式図である。
【図22】本発明の第1の実施の形態に係る人分布計測システムと人の存在位置の関係を示す模式図である。
【図23】本発明の第1の実施の形態に係る人分布計測方法を示すフローチャートである。
【図24】本発明の第2の実施の形態に係るパワースペクトルを示す第1のグラフである。
【図25】本発明の第2の実施の形態に係るパワースペクトルを示す第2のグラフである。
【図26】本発明の第2の実施の形態に係るパワースペクトルを示す第3のグラフである。
【図27】本発明の第2の実施の形態に係るパワースペクトルを示す第4のグラフである。
【符号の説明】
【0052】
3・・・人
5A, 5B, 5C, 5D, 5E, 5F, 5G, 5H, 5I, 5J, 5K, 5L・・・送受信機
300・・・CPU
301・・・変動モニタ
302・・・存在可能性算出モジュール
303・・・足し合わせモジュール
304・・・判定モジュール
400・・・データ記憶装置
401・・・受信波記憶部
402・・・影響度記憶部
403・・・結果記憶部
【技術分野】
【0001】
本発明は計測技術に関し、特に人分布計測システム及び人分布計測方法に関する。
【背景技術】
【0002】
室内における人の分布や人数を計測することは、室内の空調を適切に制御するために重要である。また、ビルの管理運用において、室内における人の分布や人数を計測することは、防犯、セキュリティ管理、災害時の避難誘導、及び室内照明制御にとっても重要である。現在、人の分布や人数を計測する方法として、例えば「個別カウント方式」及び「電子タグ方式」が提案されている。
【0003】
「個別カウント方式」においては、部屋の出入口にセンサを設置し、入退室者の人数をカウントすることによって、室内の人数を推定する。しかし、個別カウント方式は、室内の人の分布を計測できない。また子供連れ等でカウントミスが発生し、推定人数に誤差が生じやすいという欠点がある。「電子タグ方式」においては、室内に入る全ての人に電波や光を発信する電子タグを持たせ、電波等の発信位置を特定することにより、室内の人の分布を推定する。しかし、室内に不特定多数の人が出入りする場合には、入室者総てにタグを持たせることは困難である。また、タグの電池交換が煩雑であるという問題もある。
【0004】
そこで、「個別カウント方式」及び「電子タグ方式」の欠点を解決すべく、「画像分析方式」が提案されている(例えば、特許文献1参照。)。「画像分析方式」においては、天井等に監視カメラを設置し、画像を分析して室内の人数分布を推定する。しかし、画像分析方式は複数の監視カメラを必要とし、設置コストが高価であるという問題がある。また、人を撮影するため、プライバシーを侵害するおそれもある。したがって、プライバシーを侵害することなく、室内における人の分布を計測可能な方法が望まれていた。
【特許文献1】特開平11-219437号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、監視カメラに頼ることなく平面上の人の分布を計測可能な人分布計測システム及び人分布計測方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の特徴は、(イ)空間を伝播し、それぞれ識別可能な波を発する、平面上に配置された複数の送信機と、(ロ)波を受信する、平面上に配置された複数の受信機と、(ハ)送信機及び受信機の複数の対のそれぞれについて、受信した波の変動をモニタする変動モニタと、(ニ)送信機及び受信機の複数の対のそれぞれについて、人の存在が波の変動に影響を与える影響度の平面分布を保存する影響度記憶部と、(ホ)送信機及び受信機の複数の対のそれぞれについて、影響度に波の変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュールと、(ヘ)送信機及び受信機の複数の対のそれぞれについて算出された存在可能性の平面分布を足し合わせる足し合わせモジュールと、を備える人分布計測システムであることを要旨とする。本発明の人分布計測システムによれば、波の変動に基づいて人の存在可能性の分布を算出可能であるため、監視カメラを必要とせず、計測対象者のプライバシーを侵害しない。
【0007】
本発明の他の特徴は、(イ)平面上に配置された複数の送信機から、空間を伝播し、それぞれ識別可能な波を発するステップと、(ロ)平面上に配置された複数の受信機で、波を受信するステップと、(ハ)送信機及び受信機の複数の対のそれぞれについて、受信した波の変動をモニタするステップと、(ニ)送信機及び受信機の複数の対のそれぞれについて、予め取得された、人の存在が波の変動に影響を与える影響度の平面分布を用意するステップと、(ホ)送信機及び受信機の複数の対のそれぞれについて、影響度に波の変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出するステップと、(ヘ)送信機及び受信機の複数の対のそれぞれについて算出された存在可能性の平面分布を足し合わせるステップと、を含む人分布計測方法であることを要旨とする。本発明の人分布計測方法によれば、波の変動に基づいて人の存在可能性の分布を算出可能であるため、監視カメラを必要とせず、計測対象者のプライバシーを侵害しない。
【発明の効果】
【0008】
本発明によれば、監視カメラに頼ることなく平面上の人の分布を計測可能な人分布計測システム及び人分布計測方法を提供可能である。
【発明を実施するための最良の形態】
【0009】
以下に本発明の実施の形態を説明する。以下の図面の記載において、同一又は類似の部分には同一又は類似の符号で表している。但し、図面は模式的なものである。したがって、具体的な寸法等は以下の説明を照らし合わせて判断するべきものである。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることは勿論である。
【0010】
(第1の実施の形態)
第1の実施の形態に係る人分布計測システムは、図1に示すように、平面上に配置された複数の送受信機5A, 5B, 5C, 5D, 5E, 5F, 5G, 5H, 5I, 5J, 5K, 5Lを備える。複数の送受信機5A-5Lは、それぞれ識別可能な空間を伝播する波を放射し、また、自局以外の他の送受信機5A-5Lから放射された波を受信する。なお、空間を伝播する波とは、電波及び超音波等を指す。以下においては、空間を伝播する波として電波を用いる例を説明する。
【0011】
人分布計測システムは、さらに、複数の送受信機5A-5Lに接続された中央演算処理装置(CPU)300を備える。CPU300は、送受信機5A-5Lの複数の対のそれぞれについて、受信電波の変動をモニタする変動モニタ301を備える。CPU300には、データ記憶装置400が接続されている。データ記憶装置400は、送受信機5A-5Lの複数の対のそれぞれについて、人の存在が電波の変動に影響を与える影響度の平面分布を保存する影響度記憶部402を備える。
【0012】
CPU300は、さらに、送受信機5A-5Lの複数の対のそれぞれについて、影響度に電波の変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュール302、送受信機5A-5Lの複数の対のそれぞれについて算出された存在可能性の分布を足し合わせる足し合わせモジュール303、及び足し合わされた存在可能性の分布において、存在可能性の高い領域に人が存在すると判定する判定モジュール304を備える。
【0013】
複数の送受信機5A-5Lは、格子状に配置されている。図2に示すように、送受信機5Aが、送受信機5Aから送信されたと識別可能な信号を含む変調波をまず放射する。他の送受信機5B-5Lは、送受信機5Aから放射された電波を受信し、受信した電波の特性を記録する。次に、図3に示すように、送受信機5Bが、送受信機5Bから送信されたと識別可能な信号を含む変調波を放射する。他の送受信機5A, 5C-5Lは、送受信機5Bから放射された電波を受信し、受信した電波の特性を記録する。以後、送受信機5C-5Lが、識別可能な信号を含む変調波を次々と放射し、複数の送受信機5A-5Lは、自局以外の総ての送受信機のそれぞれが発した電波を受信し、特性を記録する。例えば、送受信機5Aは、他の総ての送受信機5B-5Lのそれぞれから放射された識別可能な電波を受信し、特性を記録する。送受信機5Bは、他の総ての送受信機5A, 5C-5Lのそれぞれから放射された識別可能な電波を受信し、特性を記録する。なお、電波の特性とは、例えば電波の強度、位相(周波数)、偏波角及び到来方向等を意味する。
【0014】
複数の送受信機5A-5Lのそれぞれが、自局以外の総ての送受信機が発した電波の特性を記録した場合、複数の送受信機5A-5Lは、記録した電波の特性をCPU300に送信する。送信には、無線通信を用いてもよいし、有線の構内通信網(LAN)を用いてもよい。CPU300は、受信した電波の特性を、データ記憶装置400の受信波記憶部401に保存する。したがって、受信波記憶部401には、複数の送受信機5A-5Lの総ての組み合わせについての受信電波の特性が保存される。以下、送信機としての送受信機i及び受信機としての送受信機jの対における受信電波の特性をSi_jと表す。ここで、iは、5A-5Lのいずれかであり、jは、iと異なる5A-5Lのいずれかである。例えば、送受信機5Aから送信され、送受信機5Bで受信された電波の特性は、S5A_5Bと表される。
【0015】
なお、複数の送受信機5A-5Lのそれぞれにおいて、自局が放射した電波を自局で受信することはできないので、受信波記憶部401に保存される電波の特性Si_jにおいて、i=jとなることはない。また、電波の特性Si_jと電波の特性Sj_iは、通常ほぼ等しくなる。そのため、電波の特性Si_jが取得された場合は、電波の特性Sj_iの取得を省略してもよい。例えば、送受信機5Aから送信され、送受信機5Bで受信された電波の特性S5A_5Bが取得された場合、送受信機5Bから送信され、送受信機5Aで受信される電波の特性S5B_5Aを取得することを省略してもよい。
【0016】
複数の送受信機5A-5Lは、上述した電波の送信及び受信を経時的に繰り返す。そのため、受信波記憶部401には、複数の送受信機5A-5Lの総ての組み合わせについての受信電波の特性Si_jが経時的に記録される。
【0017】
変動モニタ301は、複数の送受信機5A-5Lの総ての組み合わせについて、受信電波の特性Si_jの変動として、例えば振幅の変動を経時的にモニタする。モニタは、例えば1秒毎に実施してもよい。なお、変動モニタ301は、必ずしも受信電波の振幅の変動を直接モニタする必要はなく、受信電波の受信信号強度(RSSI: Received Signal Strength Indicator) の変動等から間接的に受信電波の振幅の変動をモニタすればよい。以下において、受信電波の特性Si_jとして、受信電波の受信信号強度をモニタする例を説明する。
【0018】
図4は、複数の送受信機5A-5Lが配置された空間に人がいない場合の、受信電波の受信信号強度Si_jの経時変化の例を示す。空間に人がいない場合、受信電波の受信信号強度Si_jはほとんど変動しない。しかし、図5に示すように、送受信機iと送受信機jの間に人が存在しているときは、人が存在していないときと比べて、人による反射のため、受信電波の受信信号強度Si_jに変動が生じる。さらに図6、図7、図8に示すように、存在する人の数が増えるにつれて、受信電波の受信信号強度Si_jも変動する。
【0019】
図1に示す変動モニタ301は、さらに、複数の送受信機5A-5Lの総ての組み合わせのそれぞれについて、一定時間内の受信電波の受信信号強度の標準偏差Vi_jを、受信電波の変動の大きさを示す指標として算出する。図9は、空間内に存在する人が0人乃至4人のそれぞれの場合における、変動モニタ301が算出した受信電波の受信信号強度の標準偏差Vi_jの一例である。図10に示すように、空間内に存在する人の数が増加するにつれて、受信電波の受信信号強度の標準偏差Vi_jは増加する。反対に、空間内に存在する人の数が減少するにつれて、受信電波の受信信号強度の標準偏差Vi_jは減少する。なお、図9及び図10に示す標準偏差の単位は、デシベル(dB)である。
【0020】
図1に示す影響度記憶部402は、送受信機iと送受信機jの総ての組み合わせのそれぞれについて、人の存在が受信信号強度の標準偏差Vi_jの増加へ与える影響度wi_jの平面分布を示す影響度分布マップを保存する。例えば、送受信機iと送受信機jの対についての影響度分布マップにおいて、送受信機iと送受信機jの位置を焦点とする楕円の外側の影響度wi_jは0とされ、楕円の内側の影響度wi_jは1とされる。以下、楕円の外周を境界として影響度wi_jが設定される理由について説明する。
【0021】
電波は伝播距離に応じて減衰するため、送受信機5Aから送受信機5Bへ向かう波長λの直接波の伝播距離Ddと直接波の伝播損失係数Ldの関係は、下記(1)式で与えられる。
Ld = (4πDd /λ)2 ・・・(1)
【0022】
また、送受信機5Aから放射され、人で反射され送受信機5Bに到達する波長λの反射波の伝播距離Dr、反射波の伝播損失係数Lr、及び人表面の反射による損失係数Lmの関係は、下記(2)式で与えられる。
Lr = (4πDr/λ)2×Lm ・・・(2)
【0023】
送受信機5Bが受信する受信波は、直接波と反射波の合成波である。そのため、人の存在による反射波の変動が、受信波の変動となる。よって、下記(3)式に示すように、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比が、受信波の変動の比例係数になる。
Lr / Ld = (Dr2×Lm) / Dd2 = (Dr / Dd)2×Lm ・・・(3)
【0024】
直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比は、直接波の伝播距離Ddに対する反射波の伝播距離Drの比でもある。ここで、反射波の伝播距離Drは、送受信機5Aから人までの電波の伝播距離L1と、人から送受信機5Bまでの電波の伝播距離L2の和である。図11に示すように、平面上において、伝播距離L1と伝播距離L2の和が一定となる点を結ぶと、送受信機5A, 5Bの位置を焦点とする楕円となる。したがって、送受信機5A, 5Bの位置を焦点とする楕円の外周上において、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比は一定となる。
【0025】
これに対し、送受信機5A, 5Bの位置を焦点とする楕円の外側においては、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比が、楕円の外周上と比べて大きくなる。そのため、図12に示すように、送受信機5A, 5Bの位置を焦点とする楕円の外側に人3が存在する場合、反射波の伝播損失が大きく、反射波が直接波に与える影響は小さい。
【0026】
また、送受信機5A, 5Bの位置を焦点とする楕円の内側においては、直接波の伝播損失係数Ldに対する反射波の伝播損失係数Lrの比が、楕円の外周上と比べて小さくなる。そのため、図13に示すように、送受信機5A, 5Bの位置を焦点とする楕円の内側に人3が存在する場合、反射波の伝播損失が小さく、反射波が直接波に与える影響は大きい。
【0027】
よって、送受信機5A, 5Bの位置を焦点とする楕円の外側の人3の存在は、送受信機5Aから発せられ、送受信機5Bで受信される電波の受信信号強度の標準偏差V5A_5Bの増加に影響しないが、送受信機5A, 5Bの位置を焦点とする楕円の内側の人3の存在は、受信電波の受信信号強度の標準偏差V5A_5Bの増加に影響するとみなしうる。したがって、図1に示す影響度記憶部402に保存される、送受信機5Aと送受信機5Bの対についての影響度分布マップにおいて、送受信機5A, 5Bの位置を焦点とする楕円の外側の人の存在の影響度w5A_5Bは0とされ、楕円の内側の人の存在の影響度w5A_5Bは1とされる。他の送受信機iと送受信機jの対についての影響度分布マップにおいても、同様である。
【0028】
図14は、送受信機5Aと送受信機5Bの対についての影響度分布マップの一例を示す。平面が格子状に分割され、各升目に影響度w5A_5Bが記入されている。ここで、送受信機5Aと送受信機5Bの位置を焦点とする楕円の内側においては、影響度w5A_5Bが1にされている。また、送受信機5Aと送受信機5Bの位置を焦点とする楕円の外側においては、影響度w5A_5Bが0にされている。
【0029】
図15は、送受信機5Aと送受信機5Fの対についての影響度分布マップの一例を示す。ここで、送受信機5Aと送受信機5Fの位置を焦点とする楕円の内側においては、影響度w5A_5Fが1にされている。また、送受信機5Aと送受信機5Fの位置を焦点とする楕円の外側においては、影響度w5A_5Fが0にされている。
【0030】
図16は、送受信機5Bと送受信機5Fの対についての影響度分布マップの一例を示す。ここで、送受信機5Bと送受信機5Fの位置を焦点とする楕円の内側においては、影響度w5B_5Fが1にされている。また、送受信機5Bと送受信機5Fの位置を焦点とする楕円の外側においては、影響度w5B_5Fが0にされている。
【0031】
図17は、送受信機5Bと送受信機5Eの対についての影響度分布マップの一例を示す。ここで、送受信機5Bと送受信機5Eの位置を焦点とする楕円の内側においては、影響度w5B_5Eが1にされている。また、送受信機5Bと送受信機5Eの位置を焦点とする楕円の外側においては、影響度w5B_5Eが0にされている。
【0032】
図1に示す存在可能性算出モジュール302は、送受信機iと送受信機jの複数の対のそれぞれについて、影響度分布マップ上の影響度wi_jに、受信電波の信号強度の標準偏差Vi_jを乗じ、人の存在可能性Pi_jの平面分布を示す存在可能性分布マップを生成する。例えば、送受信機5Aと送受信機5Bの対における信号強度の標準偏差V5A_5Bが0であった場合、図14に示す影響度分布マップ上の総ての影響度w5A_5Bに0が掛けられるため、図18に示すように、送受信機5Aと送受信機5Bの対についての存在可能性分布マップ上の存在可能性P5A_5Bは総て0になる。また、例えば、送受信機5Aと送受信機5Fの対における信号強度の標準偏差V5A_5Fが2であった場合、図15に示す影響度分布マップ上の総ての影響度w5A_5Fに2が掛けられ、図19に示すように、送受信機5Aと送受信機5Fの位置を焦点とする楕円の内側において存在可能性P5A_5Fが2と記録され、楕円の外側において存在可能性P5A_5Fが0と記録された、送受信機5Aと送受信機5Fの対についての存在可能性分布マップが生成される。
【0033】
また、例えば、送受信機5Bと送受信機5Fの対における信号強度の標準偏差V5B_5Fが0であった場合、図16に示す影響度分布マップ上の総ての影響度w5B_5Fに0が掛けられるため、送受信機5Bと送受信機5Fの対についての存在可能性分布マップ上の存在可能性P5B_5Fは総て0になる。また、例えば、送受信機5Bと送受信機5Eの対における信号強度の標準偏差V5B_5Eが2であった場合、図17に示す影響度分布マップ上の総ての影響度w5B_5Eに2が掛けられ、図20に示すように、送受信機5Bと送受信機5Eの位置を焦点とする楕円の内側において存在可能性P5B_5Eが2と記録され、楕円の外側において存在可能性P5B_5Eが0と記録された、送受信機5Bと送受信機5Eの対についての存在可能性分布マップが生成される。
【0034】
図1に示す足し合わせモジュール303は、複数の送受信機5A-5Lの総ての組み合わせについての存在可能性分布マップ上の同一座標における存在可能性Pi_jを足し合わせ、足し合わされた存在可能性PSUMの平面分布を示す積算存在可能性分布マップを生成する。例えば、送受信機5Aと送受信機5Fの対についての存在可能性分布マップが図19であり、送受信機5Bと送受信機5Eの対についての存在可能性分布マップが図20であり、その他の総ての送受信機iと送受信機jの対についての存在可能性分布マップが図18であった場合、総ての存在可能性分布マップ上の存在可能性Pi_jが足し合わされ、図21に示す積算存在可能性分布マップが得られる。
【0035】
図1に示す判定モジュール304は、積算存在可能性分布マップ上において、足し合わされた存在可能性PSUMが高い領域に、人が存在すると判定する。例えば、図21に示す積算存在可能性分布マップが得られた場合、送受信機5A, 5B, 5E, 5Fを頂点とする四角形の中心付近の領域において、足し合わされた存在可能性PSUMが4となり、最も高い。この場合、判定モジュール304は、図22に示すように、送受信機5A, 5B, 5E, 5Fを頂点とする四角形の中心付近の領域に、人3が存在すると判定する。
【0036】
また、図9及び図10に示したように、人数の増加によりの受信電波の受信信号強度の標準偏差Vi_jは増加する。したがって、存在可能性PSUMは人数に比例して高くなる。よって判定モジュール304は、存在可能性PSUMが高い領域に、存在可能性PSUMが低い領域と比較して多数の人が存在すると判定してもよい。
【0037】
データ記憶装置400は、結果記憶部403をさらに備える。結果記憶部403には、存在可能性算出モジュール302が生成した存在可能性分布マップ、足し合わせモジュール303が生成した積算存在可能性分布マップ、及び判定モジュール304の判定結果等が保存される。
【0038】
次に第1の実施の形態に係る人分布計測方法を、図23に示すフローチャートを用いて説明する。
(a) ステップS101で、図1に示す複数の送受信機5A-5Lは、それぞれ識別可能な電波を次々と送信する。また、複数の送受信機5A-5Lは、自局以外の送受信機から送信されてきた電波を次々と受信し、受信電波の受信信号強度を記録する。複数の送受信機5A-5Lは、経時的に受信電波の受信信号強度をCPU300に送信し、CPU300は、iを5A-5Lのいずれか、jをiと異なる5A-5Lのいずれかとして、送受信機i及び送受信機jの対における受信電波の受信信号強度Si_jをデータ記憶装置400の受信波記憶部401に経時的に保存する。
【0039】
(b) ステップS102で、変動モニタ301は、受信波記憶部401に経時的に保存される受信信号強度Si_jの変動をモニタする。さらにステップS103で、変動モニタ301は、送受信機i及び送受信機jの対における受信信号強度の標準偏差Vi_jを算出する。次にステップS104で、存在可能性算出モジュール302は、影響度記憶部402から、送受信機iと送受信機jの総ての組み合わせのそれぞれについての影響度分布マップを読み出す。
【0040】
(c) ステップS105で、存在可能性算出モジュール302は、送受信機i及び送受信機jの対についての影響度分布マップ上に記録された人の存在の影響度wi_jに、送受信機i及び送受信機jの対における受信信号強度の標準偏差Vi_jを掛け、存在可能性Pi_jの平面分布を示す存在可能性分布マップを生成する。存在可能性算出モジュール302は、送受信機iと送受信機jの総ての組み合わせのそれぞれについての存在可能性分布マップを、結果記憶部403に保存する。
【0041】
(d) ステップS106で、足し合わせモジュール303は、送受信機iと送受信機jの総ての組み合わせのそれぞれについての存在可能性分布マップを結果記憶部403から読み出す。次に足し合わせモジュール303は、存在可能性分布マップに記録されている同一座標における存在可能性Pi_jを総て足し合わせ、足し合わされた存在可能性PSUMの平面分布を示す積算存在可能性分布マップを生成する。その後、足し合わせモジュール303は、積算存在可能性分布マップを結果記憶部403に保存する。
【0042】
(e) ステップS107で、判定モジュール304は、結果記憶部403から積算存在可能性分布マップを読み出す。次に判定モジュール304は、積算存在可能性分布マップ上において、足し合わされた存在可能性PSUMが高い領域に人が存在すると判定する。その後、判定モジュール304は、人が存在すると判定された領域を結果記憶部403に記録し、第1の実施の形態に係る人分布計測方法を終了する。
【0043】
以上示した第1の実施の形態に係る人分布計測システム及び人分布計測方法によれば、監視カメラを用いずに、平面上の人数分布を把握することが可能になる。そのため、計測対象者のプライバシーが侵害されない。また、電波は天井材質である石膏ボードや木材を透過する性質を利用して、送信機・受信機を天井裏に完全に隠して設置することが可能である。このため監視カメラのように天井の美観を損ねることもない。また、存在可能性分布マップを足し合わせることにより、存在可能性PSUMが高い領域が狭められる。そのため、人の存在位置をより細かく特定することが可能となる。
【0044】
(第1の実施の形態の変形例)
第1の実施の形態においては、影響度分布マップにおいて、送受信機iと送受信機jの位置を焦点とする楕円の外側の影響度wi_jが0とされ、楕円の内側の影響度wi_jが1とされる例を説明した。しかし、影響度wi_jの値は0、1に限定されず、任意に設定可能である。例えば、楕円の外側に向かって影響度wi_jの値を段階的に上昇させ、また楕円の内側に向かって影響度wi_jの値を段階的に低下させてもよい。また、影響度wi_jの境界線として楕円を使用する必要は必ずしもない。例えば人の存在の影響度を平面上で予め実験的に取得し、実験的に取得された影響度の分布を影響度分布マップに記録してもよい。また、視覚的なマップを生成する必要は必ずしもなく、各座標ごとの影響度が記録されていればよい。
【0045】
(第2の実施の形態)
第1の実施の形態に係る人分布計測システムにおいては、図1に示す変動モニタ301が、受信電波の受信信号強度の変動をモニタする例を説明した。これに対し、第2の実施の形態に係る人分布計測システムにおいては、変動モニタ301は、受信電波の周波数分布の変動をモニタする。
【0046】
ここで、図24は空間に存在する人の数が1人の場合の周波数のパワースペクトルの例を示し、図25は空間に存在する人の数が2人の場合のパワースペクトルの例を示し、図26は空間に存在する人の数が3人の場合のパワースペクトルの例を示し、図27は空間に存在する人の数が4人の場合のパワースペクトルの例を示す。図24乃至図27に示すように、人数が増加するにつれて、受信電波の高周波成分が増加する。反対に、人数が減少するにつれて、受信電波の高周波成分は減少する。この場合、図1に示す変動モニタ301は、高周波成分の強度を、受信電波の変動の大きさを示す指標として算出する。
【0047】
また、第2の実施の形態においては、存在可能性算出モジュール302は、影響度分布マップ上の影響度wi_jに、送受信機i及び送受信機jの対における受信電波の高周波成分の強度を乗じ、人の存在可能性Pi_jの平面分布を示す存在可能性分布マップを生成する。第2の実施の形態に係る人分布計測システムのその他の構成要素は、第1の実施の形態と同様であるので、説明は省略する。
第2の実施の形態に係る人分布計測システムによっても、監視カメラを用いることなく、平面上の人数分布を高い精度で計測することが可能になる。
【0048】
(その他の実施の形態)
上記のように本発明を実施の形態によって記載したが、この開示の一部をなす記述及び図面はこの発明を限定するものであると理解するべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかになるはずである。
【0049】
例えば、第1の実施の形態において、図1に示す複数の送受信機5A-5Lは格子状に配置されていると説明したが、必ずしも複数の送受信機5A-5Lは格子状に等間隔に配置されている必要はなく、複数の送受信機5A-5Lは適当な間隔で分散して配置されていればよい。また、送受信機を用いた例を示したが、送信機と受信機とを別個に配置してもよいことは勿論である。
【0050】
この様に、本発明はここでは記載していない様々な実施の形態等を包含するということを理解すべきである。したがって、本発明はこの開示から妥当な特許請求の範囲の発明特定事項によってのみ限定されるものである。
【図面の簡単な説明】
【0051】
【図1】本発明の第1の実施の形態に係る人分布計測システムの模式図である。
【図2】本発明の第1の実施の形態に係る送受信機から発せられた電波の経路を示す第1の模式図である。
【図3】本発明の第1の実施の形態に係る送受信機から発せられた電波の経路を示す第2の模式図である。
【図4】本発明の第1の実施の形態に係る電波の受信信号強度を示す第1のグラフである。
【図5】本発明の第1の実施の形態に係る電波の受信信号強度を示す第2のグラフである。
【図6】本発明の第1の実施の形態に係る電波の受信信号強度を示す第3のグラフである。
【図7】本発明の第1の実施の形態に係る電波の受信信号強度を示す第4のグラフである。
【図8】本発明の第1の実施の形態に係る電波の受信信号強度を示す第5のグラフである。
【図9】本発明の第1の実施の形態に係る電波の受信信号強度の標準偏差を示す表である。
【図10】本発明の第1の実施の形態に係る電波の受信信号強度の標準偏差を示すグラフである。
【図11】本発明の第1の実施の形態に係る二つの送受信機の位置を焦点とする楕円の模式図である。
【図12】本発明の第1の実施の形態に係る二つの送受信機の位置を焦点とする楕円と人の存在位置の関係を示す第1の模式図である。
【図13】本発明の第1の実施の形態に係る二つの送受信機の位置を焦点とする楕円と人の存在位置の関係を示す第2の模式図である。
【図14】本発明の第1の実施の形態に係る影響度分布マップを示す第1の模式図である。
【図15】本発明の第1の実施の形態に係る影響度分布マップを示す第2の模式図である。
【図16】本発明の第1の実施の形態に係る影響度分布マップを示す第3の模式図である。
【図17】本発明の第1の実施の形態に係る影響度分布マップを示す第4の模式図である。
【図18】本発明の第1の実施の形態に係る存在可能性分布マップを示す第1の模式図である。
【図19】本発明の第1の実施の形態に係る存在可能性分布マップを示す第2の模式図である。
【図20】本発明の第1の実施の形態に係る存在可能性分布マップを示す第3の模式図である。
【図21】本発明の第1の実施の形態に係る足し合わされた存在可能性分布マップを示す模式図である。
【図22】本発明の第1の実施の形態に係る人分布計測システムと人の存在位置の関係を示す模式図である。
【図23】本発明の第1の実施の形態に係る人分布計測方法を示すフローチャートである。
【図24】本発明の第2の実施の形態に係るパワースペクトルを示す第1のグラフである。
【図25】本発明の第2の実施の形態に係るパワースペクトルを示す第2のグラフである。
【図26】本発明の第2の実施の形態に係るパワースペクトルを示す第3のグラフである。
【図27】本発明の第2の実施の形態に係るパワースペクトルを示す第4のグラフである。
【符号の説明】
【0052】
3・・・人
5A, 5B, 5C, 5D, 5E, 5F, 5G, 5H, 5I, 5J, 5K, 5L・・・送受信機
300・・・CPU
301・・・変動モニタ
302・・・存在可能性算出モジュール
303・・・足し合わせモジュール
304・・・判定モジュール
400・・・データ記憶装置
401・・・受信波記憶部
402・・・影響度記憶部
403・・・結果記憶部
【特許請求の範囲】
【請求項1】
空間を伝播し、それぞれ識別可能な波を発する、平面上に配置された複数の送信機と、
前記波を受信する、前記平面上に配置された複数の受信機と、
前記送信機及び受信機の複数の対のそれぞれについて、前記受信した波の変動をモニタする変動モニタと、
前記送信機及び受信機の複数の対のそれぞれについて、人の存在が前記波の変動に与える影響度の平面分布を保存する影響度記憶部と、
前記送信機及び受信機の複数の対のそれぞれについて、前記影響度に前記波の変動の大きさを乗じて算出される、前記人の存在可能性の平面分布を算出する存在可能性算出モジュールと、
前記送信機及び受信機の複数の対のそれぞれについて算出された前記存在可能性の平面分布を足し合わせる足し合わせモジュールと、
を備えることを特徴とする人分布計測システム。
【請求項2】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に人が存在すると判定する判定モジュールを更に備えることを特徴とする請求項1に記載の人分布計測システム。
【請求項3】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に、前記存在可能性の低い領域と比較して多数の人が存在すると判定する判定モジュールを更に備えることを特徴とする請求項1に記載の人分布計測システム。
【請求項4】
前記変動モニタが、前記波の変動として、前記波の強度の変動をモニタすることを特徴とする請求項1乃至3のいずれか1項に記載の人分布計測システム。
【請求項5】
前記変動モニタが、前記波の変動として、前記波の強度の標準偏差をモニタすることを特徴とする請求項1乃至3のいずれか1項に記載の人分布計測システム。
【請求項6】
前記変動モニタが、前記波の変動として、前記波の周波数分布の変動をモニタすることを特徴とする請求項1乃至3のいずれか1項に記載の人分布計測システム。
【請求項7】
前記送信機及び受信機の複数の対のそれぞれについて、前記送信機及び受信機の位置を焦点とする楕円の内側における前記影響度が、前記楕円の外側における前記影響度よりも高いことを特徴とする請求項1乃至6のいずれか1項に記載の人分布計測システム。
【請求項8】
平面上に配置された複数の送信機から、空間を伝播し、それぞれ識別可能な波を発するステップと、
前記平面上に配置された複数の受信機で、前記波を受信するステップと、
前記送信機及び受信機の複数の対のそれぞれについて、前記受信した波の変動をモニタするステップと、
前記送信機及び受信機の複数の対のそれぞれについて、予め取得された、人の存在が前記波の変動に与える影響度の平面分布を用意するステップと、
前記送信機及び受信機の複数の対のそれぞれについて、前記影響度に前記波の変動の大きさを乗じて算出される、前記人の存在可能性の平面分布を算出するステップと、
前記送信機及び受信機の複数の対のそれぞれについて算出された前記存在可能性の平面分布を足し合わせるステップと、
を含むことを特徴とする人分布計測方法。
【請求項9】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に人が存在すると判定するステップを更に含むことを特徴とする請求項8に記載の人分布計測方法。
【請求項10】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に、前記存在可能性の低い領域と比較して多数の人が存在すると判定するステップを更に含むことを特徴とする請求項8に記載の人分布計測方法。
【請求項11】
前記波の変動として、前記波の強度の変動をモニタすることを特徴とする請求項8乃至10のいずれか1項に記載の人分布計測方法。
【請求項12】
前記波の変動として、前記波の強度の標準偏差をモニタすることを特徴とする請求項8乃至10のいずれか1項に記載の人分布計測方法。
【請求項13】
前記波の変動として、前記波の周波数分布の変動をモニタすることを特徴とする請求項8乃至10のいずれか1項に記載の人分布計測方法。
【請求項14】
前記送信機及び受信機の複数の対のそれぞれについて、前記送信機及び受信機の位置を焦点とする楕円の内側における前記影響度が、前記楕円の外側における前記影響度よりも高いことを特徴とする請求項8乃至13のいずれか1項に記載の人分布計測方法。
【請求項1】
空間を伝播し、それぞれ識別可能な波を発する、平面上に配置された複数の送信機と、
前記波を受信する、前記平面上に配置された複数の受信機と、
前記送信機及び受信機の複数の対のそれぞれについて、前記受信した波の変動をモニタする変動モニタと、
前記送信機及び受信機の複数の対のそれぞれについて、人の存在が前記波の変動に与える影響度の平面分布を保存する影響度記憶部と、
前記送信機及び受信機の複数の対のそれぞれについて、前記影響度に前記波の変動の大きさを乗じて算出される、前記人の存在可能性の平面分布を算出する存在可能性算出モジュールと、
前記送信機及び受信機の複数の対のそれぞれについて算出された前記存在可能性の平面分布を足し合わせる足し合わせモジュールと、
を備えることを特徴とする人分布計測システム。
【請求項2】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に人が存在すると判定する判定モジュールを更に備えることを特徴とする請求項1に記載の人分布計測システム。
【請求項3】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に、前記存在可能性の低い領域と比較して多数の人が存在すると判定する判定モジュールを更に備えることを特徴とする請求項1に記載の人分布計測システム。
【請求項4】
前記変動モニタが、前記波の変動として、前記波の強度の変動をモニタすることを特徴とする請求項1乃至3のいずれか1項に記載の人分布計測システム。
【請求項5】
前記変動モニタが、前記波の変動として、前記波の強度の標準偏差をモニタすることを特徴とする請求項1乃至3のいずれか1項に記載の人分布計測システム。
【請求項6】
前記変動モニタが、前記波の変動として、前記波の周波数分布の変動をモニタすることを特徴とする請求項1乃至3のいずれか1項に記載の人分布計測システム。
【請求項7】
前記送信機及び受信機の複数の対のそれぞれについて、前記送信機及び受信機の位置を焦点とする楕円の内側における前記影響度が、前記楕円の外側における前記影響度よりも高いことを特徴とする請求項1乃至6のいずれか1項に記載の人分布計測システム。
【請求項8】
平面上に配置された複数の送信機から、空間を伝播し、それぞれ識別可能な波を発するステップと、
前記平面上に配置された複数の受信機で、前記波を受信するステップと、
前記送信機及び受信機の複数の対のそれぞれについて、前記受信した波の変動をモニタするステップと、
前記送信機及び受信機の複数の対のそれぞれについて、予め取得された、人の存在が前記波の変動に与える影響度の平面分布を用意するステップと、
前記送信機及び受信機の複数の対のそれぞれについて、前記影響度に前記波の変動の大きさを乗じて算出される、前記人の存在可能性の平面分布を算出するステップと、
前記送信機及び受信機の複数の対のそれぞれについて算出された前記存在可能性の平面分布を足し合わせるステップと、
を含むことを特徴とする人分布計測方法。
【請求項9】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に人が存在すると判定するステップを更に含むことを特徴とする請求項8に記載の人分布計測方法。
【請求項10】
前記足し合わされた存在可能性の平面分布において、前記存在可能性の高い領域に、前記存在可能性の低い領域と比較して多数の人が存在すると判定するステップを更に含むことを特徴とする請求項8に記載の人分布計測方法。
【請求項11】
前記波の変動として、前記波の強度の変動をモニタすることを特徴とする請求項8乃至10のいずれか1項に記載の人分布計測方法。
【請求項12】
前記波の変動として、前記波の強度の標準偏差をモニタすることを特徴とする請求項8乃至10のいずれか1項に記載の人分布計測方法。
【請求項13】
前記波の変動として、前記波の周波数分布の変動をモニタすることを特徴とする請求項8乃至10のいずれか1項に記載の人分布計測方法。
【請求項14】
前記送信機及び受信機の複数の対のそれぞれについて、前記送信機及び受信機の位置を焦点とする楕円の内側における前記影響度が、前記楕円の外側における前記影響度よりも高いことを特徴とする請求項8乃至13のいずれか1項に記載の人分布計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2010−54277(P2010−54277A)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願番号】特願2008−218171(P2008−218171)
【出願日】平成20年8月27日(2008.8.27)
【出願人】(000006666)株式会社山武 (1,808)
【Fターム(参考)】
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願日】平成20年8月27日(2008.8.27)
【出願人】(000006666)株式会社山武 (1,808)
【Fターム(参考)】
[ Back to top ]