
人型機械
【課題】
マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように人の情動を呼び起こす魅力的で美しい下肢の動作制御を行うこと。
【解決手段】
関節が駆動する身体を持つマネキンやロボットなどの人型機械で、腰と脚が連動してファッションモデルのようなポーズをとるための美しい動きの表現方法と機構。
左右脚交差動作と左右股関節の前後揺動動作の同期による連動や、脚の旋回動作と股関節の上下
揺動の同期による連動により、下肢の美しい表現を可能にした。
マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように人の情動を呼び起こす魅力的で美しい下肢の動作制御を行うこと。
【解決手段】
関節が駆動する身体を持つマネキンやロボットなどの人型機械で、腰と脚が連動してファッションモデルのようなポーズをとるための美しい動きの表現方法と機構。
左右脚交差動作と左右股関節の前後揺動動作の同期による連動や、脚の旋回動作と股関節の上下
揺動の同期による連動により、下肢の美しい表現を可能にした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、腰部と脚部が連動するマネキンや人形、ロボットなど人型機械に関する。
【背景技術】
【0002】
関節駆動型マネキンは衣服を着て動かす過程をファッションモデルのように美しく見せる必要
がある。また、人型ロボットにより美しい動きを与えることで人の情動を呼び起こすことが可能に
なる。そのような例は、たとえば下記の特許文献1に記載されている。
【0003】
【特許文献1】国際特許WO-A1-2004019736
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の関節可動マネキンや、人型ロボット等人型機械は歩行や手の動きといった四肢を動かすものであった。上記特許文献1に記載のマネキン人形も同様である。
【0005】
四肢の動きは自然な動きをするものがあるが、腰部から脚部にかけて部位の動きがぎこちないの
で、どうしても自然な美しさを表現することができなかった。本発明はこのような人型機械に対し、より人間に近い自然な動きを持たせるために、腰部と脚部が連動することで、ファッションモデルのような魅力的な下肢の動きを有する人型機械を提供しようとするものである。
【課題を解決するための手段】
【0006】
以上の問題を解決するために、第一発明は、ファッションモデルがポーズをとる時、左右脚の交差動作時に、前方に振り出す脚側の股関節が振り出す脚に追随して前方に移動する動作に着目し、脚部の側方回転動作と、股関節の前後揺動が同期して連動することを特徴とする人型機械である。
【0007】
また、第二発明は、ファッションモデルがポーズをとる時、立脚に対し遊脚を股関節中心に側方
外転しながら外旋する動作時に、立脚側の股関節が上方移動する動作に着目し、脚の旋回動作と、
股関節の上下揺動が同期して連動することを特徴とする人型機械である。
【0008】
また、第三発明は、第一発明を実現するための骨格機構である。腰内部に人体の腰椎にあたる腰部支柱があり、この腰部支柱背部の上下に2本の横木を緊結して、股関節から腹部中央に渡るL字型リンク機構を、蝶番を介して左右に連結する。L字型リンク機構の底部は人体の股関節に相当し、底部下面に脚部が堅結する。このL字型リンク機構の両端に電動シリンダー両端を連結し、電動シリンダー内部のモータ駆動による伸縮運動によって、L字型リンク機構の内角を拡狭して、リンク機構底部に連結した脚部の側方回転動作を行う。
【0009】
また、腰部支柱背面の下部横木に左右対称に2つの回転モータを設置し、このモータ軸と股
関節から腹部中央に渡るL字型リンク機構を小型リンク機構によって連結する。これにより回転モータの回転運動を逆方向に変換してL字型リンク機構に伝達し、L字型リンク機構全体の回旋運動を行う。左右のL字型リンク機構を交互に内外旋することで、人体の股関節に相当する左右L字型リンク機構底部の前後揺動運動を実現する。
【0010】
電動シリンダーと回転モータは多軸同時制御システムの制御基盤に通信線で接続されており、運動データが送信される。これにより、脚部の側方回転動作と股関節の前後揺動運動を連動する。
【0011】
また、第四発明は、第二発明を実現するための骨格機構である。腰部支柱背面の下部横木に
固定した回転モータによる回転運動を、モータ軸に連結した小型リンク機構によって逆方向に
変換し、股関節から腹部中央に渡るL字型リンク機構全体を旋回運動する。これにより、L字型リ
ンク機構底部に堅結する脚を旋回運動する。
【0012】
また、L字型リンク機構の両端に連結した電動シリンダーの伸縮運動によって、左右のL字型リ
ンク機構の内角を交互に拡狭して、人体の股関節に相当する左右L字型リンク機構底部の上下揺動運動を実現する。
【0013】
電動シリンダーと回転モータは多軸同時制御システムの制御基盤に通信線で接続されており、運動データが送信される。これにより、脚部の回旋動作と股関節の上下揺動運動を連動する。
【0014】
また、第五発明は、ファッション用マネキンとしての美観を維持することを目的に、足首をより
細く見せるため、脚骨格を構成する大腿の平行リンクと下腿の平行リンクを膝部で連結し、大腿と下腿の運動を司る2台の電動シリンダーを全て大腿平行リンクの両脇に配置することで、股屈曲・屈伸と膝屈曲・屈伸の運動性能と、脚足首を細く見せる美観を両立した機構を有することを特徴とする人型機械である。
【0015】
大腿平行リンクの両脇に配置する2台の電動シリンダーのうち、内側は股屈曲・屈伸を担い、外側は膝屈曲・屈伸を担う。2台の電動シリンダーとも上端部は大腿背部の平行リンク構成部材の上部付近を体側方向に貫通するシャフトに連結している。内側の電動シリンダーの下端部は大腿を構成する平行リンクの対角上に、大腿底部の平行リンク構成部材を貫通する金属製シャフトに連結している。電動シリンダーの伸縮により、大腿を構成する平行リンクが内角を拡狭することで、脚を前後に振る動作を行う。
【0016】
外側の電動シリンダーの下端部は、下腿背部の平行リンク構成部材上部付近から延長した部材を貫通するシャフトに連結している。外側の電動シリンダー伸縮により、下腿を構成する平行リンクの内角が拡狭することで、膝の曲げや伸びを行う。
【0017】
電動シリンダーは多軸同時制御システムの制御基盤に通信線で接続されており、運動データが送信される。これにより、脚部の股屈曲・屈伸と膝屈曲・屈伸を連動する。
【発明の効果】
【0018】
第一発明によれば、マネキンや人形、ロボットなど人型機械に対し、ファッションモデルが地面
の一線上に足先を揃えてポーズをとる時に必要な脚部の側方回転動作と股関節の前後揺動が同期して連動することを付与することができる。
【0019】
第二発明によれば、マネキンや人形、ロボットなど人型機械に対し、ファッションモデルが片
足を開いて決めのポーズをとる時に必要な脚の旋回動作と股関節の上下揺動が同期して連動する動きを付与することができる。
【0020】
第三発明によれば、人型機械の腰部と脚部の機構に対し、脚部の側方回転動作と左右股関節の前
後揺動を同期して連動させることができるので、第一発明のように、ファッションモデルのような動きを人型機械の腰部と脚部に付与することが可能になる。
【0021】
第四発明によれば、人型機械の腰部と脚部の機構に対し、脚部の回旋動作と左右股関節の上下揺
動を同期して連動させることができるので、第二発明のように、ファッションモデルのような動きを人型機械の腰部と脚部に付与することが可能になる。
【0022】
第五発明によれば、人型機械の脚部に対し、脚足首を細く見せる美観を維持しながら、股屈曲・
屈伸と膝屈曲・屈伸を同期して連動する動きを人型機械の脚部に付与することが可能になる。
【発明を実施するための最良の形態】
【0023】
次に発明の実施の形態を説明する。
ファッションモデルのように魅力的な下肢の動きを有する腰部と脚部の動きとは、一つは、脚
部が側方回転と股関節の前後揺動が連動することである。これにより、左右脚つま先が交差すると
同時に、前方に振り出す脚側の股関節が振り出す脚に追随していくモデルの決めのポーズをとるこ
とができる。
【0024】
もう一つは、脚の旋回動作と股関節の上下揺動が連動することである。これにより、立脚に対し、
遊脚を股関節中心に側方外転しながら外旋すると同時に、立脚側の股関節が上方移動するモデルの
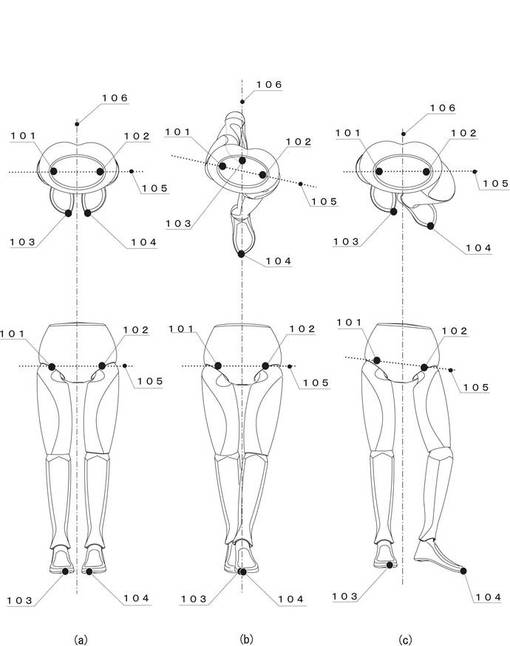
決めのポーズをとることができる。この発明における実施形態の下肢姿勢の平面図と正面図を図
1に示す。
【0025】
図1(a)は、人が立位で弛緩した時の中立的な状態で、股関節101、102が股関節101、102を結ぶ基準線105上に在る。同時につま先103、104が中心線106から等距離である。
【0026】
図1(b)は図1(a)の状態から、つま先104を前方に踏み出した時のファッションモデルのポーズである。この時、左脚と右脚は交差し、つま先103とつま先104は中心線106上に並ぶ。同時に前方に踏み出した脚に追随して股関節102は前方に移動する。
【0027】
図1(c)は図1(a)の状態から、右脚を軸足とし、左脚を側方外転しながら外旋して、膝を少し曲げた時のファッションモデルのポーズである。この時、股関節102は左脚に追随し、下方に移動する。
【0028】
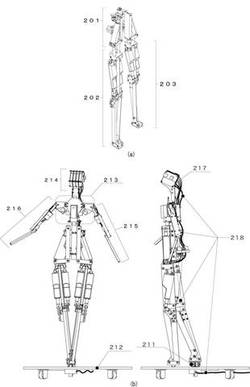
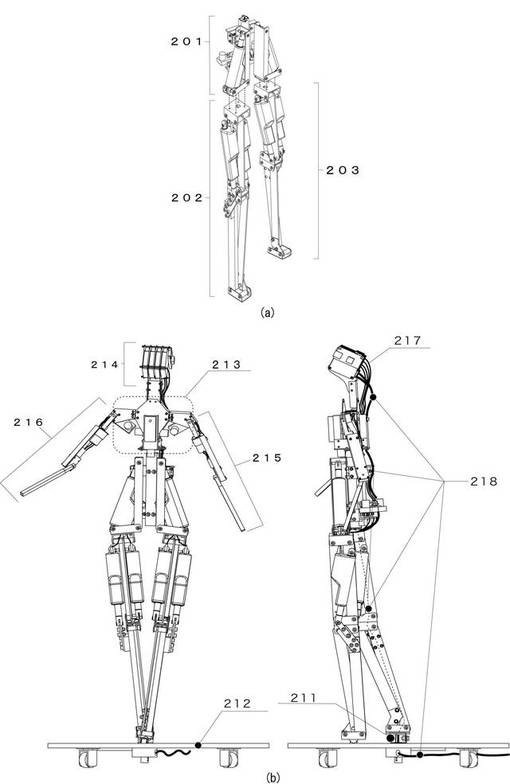
この腰部と脚部の動きを表現における実施形態の機構構成の斜視図を図2(a)に示す。この機構は腰部モジュール201と右脚部モジュール202、左脚部モジュール203によって構成される。腰部モジュールと左右脚部モジュールはボルトとナットで堅結される。
【0029】
図2(b)は図2(a)の腰部・脚部モジュールに胸部モジュール213、腕部モジュール215・216、頭部モジュール214を組み込んだ全身タイプの関節駆動型マネキンの平面図と右側面図である。頭部モジュール214が多軸同時制御システムである。各々のモジュールに組み込まれている回転、外旋、屈伸等の運動を駆動する各アクチュエータ(電動シリンダー、直流回転モータ等)に、通信線217を経由して動作データを送信する。また、各アクチュエータにはポテンショメータが設置されており、アクチュエータの動作量を検知して多軸同時制御システムにフィードバックする。多軸同時制御システムには電線218により、電力を供給する。
【0030】
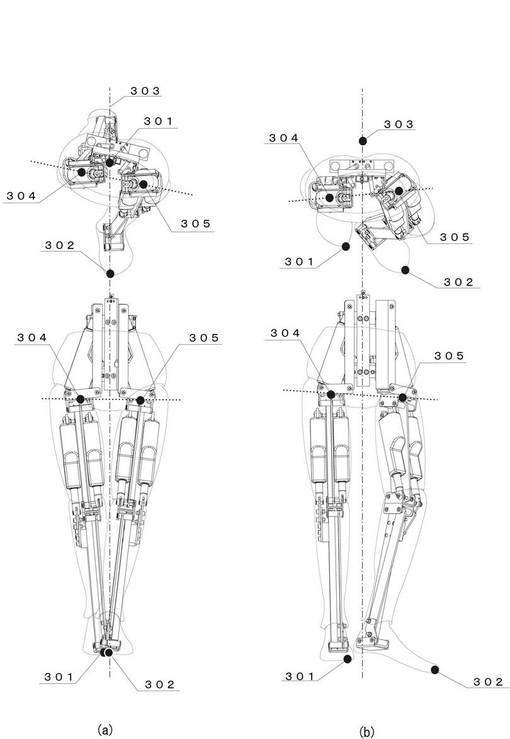
ファッションモデルの代表的なポーズと同様の動作を行う時の機構を図3(a)、(b)の
平面図と正面図に示す。図3(a)は、右脚つま先301と左脚つま先302が地面の線303
上で交差すると同時に、前方に振り出す脚側の股関節304が振り出す脚に追随する時の機構を示
している。図3(b)は立脚に対し、遊脚305を股関節304中心に側方外転しながら外旋す
ると同時に、立脚側の股関節305が上方移動する時の機構を示している。
【0031】
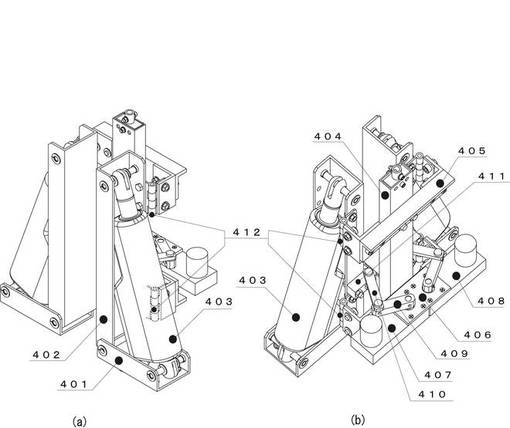
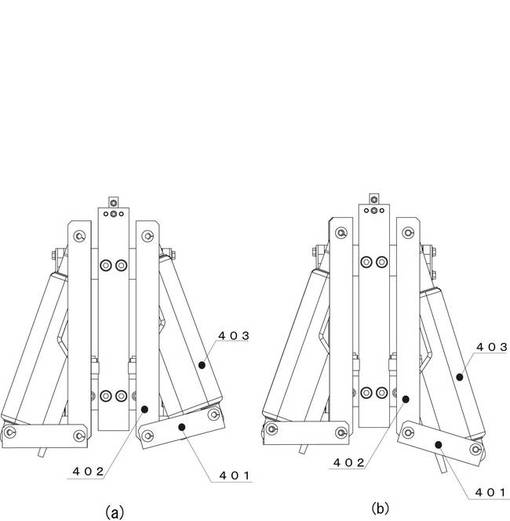
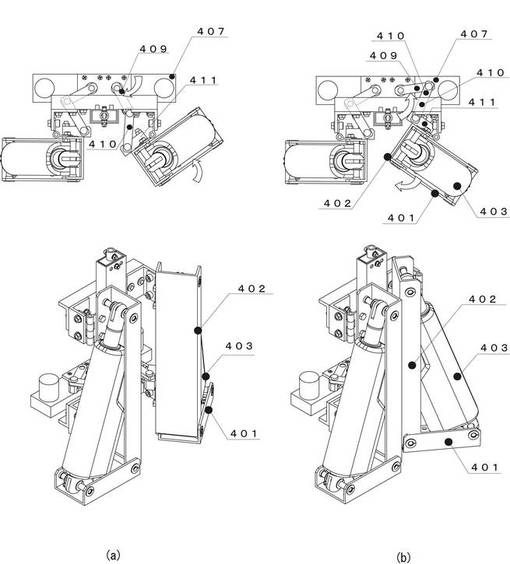
この実施形態の機構における腰部モジュールの構成を図4に示す。図4(a)は右上前方視点での斜視図で、図4(b)は図4(a)同一物の左上後方視点での斜視図である。また、脚の側方回転時における腰部モジュールの状態を表す正面図を図5に示す。さらに、脚の旋回時における腰部モジュールの状態を表す平面図と斜視図を図6に示す。
【0032】
脚部の側方外転・内転を行うのが、骨格部材401・402と電動シリンダー403のグループである。電動シリンダー403の両端が骨格部材401・402と連結しており、図5(a)のように、電動シリンダー403が縮むと骨格部材401が側方外転する。この時、骨格部材401に堅結している左脚部モジュール全体も側方外転する。図5(b)のように、電動シリンダー403が伸びると骨格部材401が側方内転する。この時、骨格部材401に堅結している左脚部モジュール全体も側方内転する。
【0033】
腰部モジュールの背骨にあたるのが支柱404である。支柱404には骨格部材405・406が堅結一体化している。404、405、406のグループと401,402,403のグループは蝶番407によって連結されている。骨格部材406には直流回転モータ407、408が堅結する。モータの回転運動はモータのシャフトに連結したリンク部材409・410・411から成るリンク機構によって伝達され、リンク部材411に結合した骨格部材402に対し、蝶番412を中心に逆回転運動に変換される。
【0034】
これにより、図6(a)のように、直流回転モータ407のシャフトの内側への回転が、リンク機構を介して骨格部材401・402と電動シリンダー403のグループ全体を外側へ旋回させる。骨格部材401には左脚部モジュールが堅結しているので、左脚全体を外旋させる。
【0035】
また、図6(b)のように、直流回転モータ407のシャフトの外側への回転が、リンク機構を介して骨格部材401・402と電動シリンダー403のグループ全体を内側へ旋回させので、左脚全体を内旋させる。
【0036】
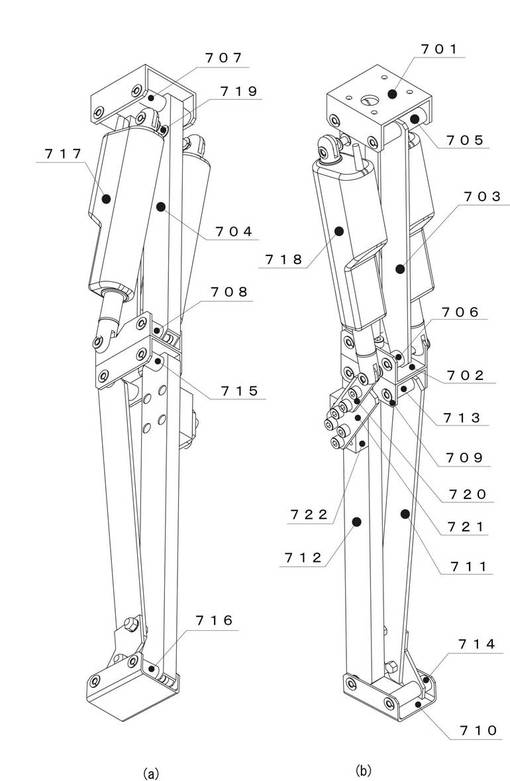
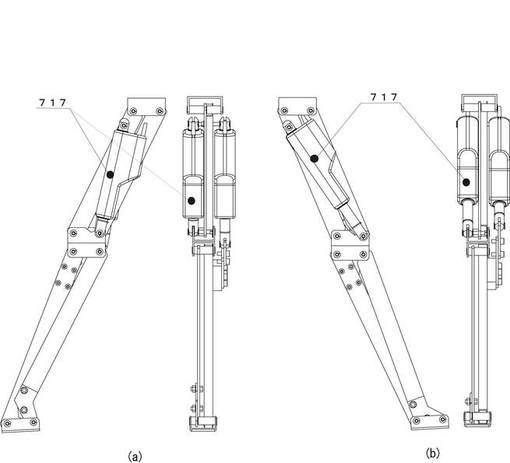
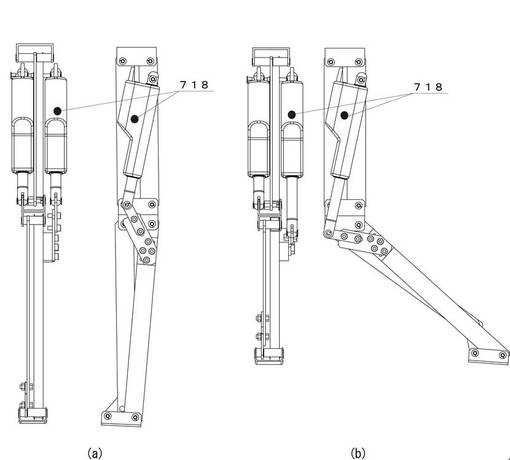
この実施形態の機構における脚部モジュールの構成を図7に示す。図7(a)は脚部モジュールの左下後方視点での斜視図で、図7(b)は図7(a)と同一物の左上前方視点からの斜視図である。また、脚の股屈曲・屈伸時における脚部モジュールの状態を表す左側面図と正面図を図8に示す。さらに、脚の膝屈曲・屈伸時における脚部モジュールの状態を表す正面図と右側面図を図9に示す。
【0037】
このモジュールは大腿の平行リンクを構成するグループと下腿の平行リンクを構成するグループに大別される。大腿の平行リンクは骨格部材701・702・703、704がシャフト705・706・707・708によって連結される。下腿の平行リンクは骨格部材709・710・711、712がシャフト714・715・716・717によって連結される。大腿下部の骨格部材702と下腿上部の骨格部材709はボルトとナットによって堅結している。
【0038】
股屈曲・屈伸を行う電動シリンダー717と膝屈曲・屈伸を行う電動シリンダー718を大腿に組み込む。これにより下腿にアクチュエータを組み込む必要がなくなり、細い足首を実現できる。
電動シリンダー717・718の上端部はシャフト719によって大腿背部の骨格部材704の上方に連結している。電動シリンダー717の下端部は大腿下部の骨格部材702に連結している。
【0039】
図8(a)のように、電動シリンダー717が縮むと脚全体が股関節を中心に後方に移動する(股屈曲)。図8(b)のように、電動シリンダー717が伸びると脚全体が股関節を中心に前方に振り出される(股屈伸)。
【0040】
電動シリンダー718の下端部は部材720に連結している。部材720は部材721に、部材721は部材722に、部材722は下腿骨格部材712に緊結している。
図9(a)のように、電動シリンダー718が縮むと膝が伸びる(膝屈伸)。図9(b)のように、電動シリンダー718が伸びると膝が曲がる(膝屈曲)。
【0041】
実施形態の効果
この発明の実施形態における表現原理によれば、マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように情動に訴求する美しい動きをさせることができる。
【0042】
この発明の実施形態における機構構成と仕組によれば、左右脚が交差すると同時に前方に振
り出す脚側の股関節が追随する連動や、立脚側の股関節が上方移動すると同時に、遊脚を股関節
中心に側方外転しながら外旋する連動を可動制御できるので、ファッションモデルのようなポー
ズをとることが可能になる。
【産業上の利用可能性】
【0043】
図2(b)はこの発明を適用した関節駆動型マネキンの全身モデルである。この全身モデル機構に外装を施した上で、ディスプレイしたい衣服を着衣することで、より現実に近い状態で衣服を見せられるため、ファッション産業でのマネキンに適用できる。
【図面の簡単な説明】
【0044】
【図1】この発明の実施動作の過程を平面と正面から表した図である。
【図2】この発明の実施機構の構成を表した斜視図と平面図と正面図である。
【図3】この発明の実施機構の動作を表した平面図と正面図である。
【図4】この発明の実施機構の仕組みを表した斜視図である。
【図5】この発明の実施機構の仕組みを表した正面図である。
【図6】この発明の実施機構の仕組みを表した平面図と斜視図である。
【図7】この発明の実施機構の仕組みを表した斜視図である。
【図8】この発明の実施機構の仕組みを左側面から表した図と正面図である。
【図9】この発明の実施機構の仕組みを右側面から表した図と正面図である。
【符号の説明】
【0045】
101 右股関節
102 左股関節
103 右つま先
104 左つま先
105 左右股関節を結ぶ線
106 身体の中心線
201 腰部モジュール
202 右脚モジュール
203 左脚モジュール
211 左脚モジュールと台の固定部品
212 台
213 胸部モジュール
214 頭部モジュール
215 左腕モジュール
216 右腕モジュール
217 制御通信ケーブル
218 電気コード
301 右つま先
302 左つま先
303 身体の中心線
304 左股関節
305 左股関節
401 L型リンク機構底部
402 L型リンク機構垂直部
403 電動シリンダー
404 腰部支柱
405 横木上
406 横木下
407 モータ
408 モータ
409 小型リンク機構部品
410 小型リンク機構部品
411 ヒンジベース
412 蝶番
701 大腿平行リンク上部
702 大腿平行リンク下部
703 大腿平行リンク前部
704 大腿平行リンク背部
705 シャフト
706 シャフト
707 シャフト
708 シャフト
709 下腿平行リンク上部
710 下腿平行リンク下部
711 下腿平行リンク前部
712 下腿平行リンク背部
713 シャフト
714 シャフト
715 シャフト
716 シャフト
717 電動シリンダー
718 電動シリンダー
719 シャフト
720 電動シリンダー留め
721 電動シリンダー留め固定具
722 電動シリンダー留め固定具
【技術分野】
【0001】
本発明は、腰部と脚部が連動するマネキンや人形、ロボットなど人型機械に関する。
【背景技術】
【0002】
関節駆動型マネキンは衣服を着て動かす過程をファッションモデルのように美しく見せる必要
がある。また、人型ロボットにより美しい動きを与えることで人の情動を呼び起こすことが可能に
なる。そのような例は、たとえば下記の特許文献1に記載されている。
【0003】
【特許文献1】国際特許WO-A1-2004019736
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の関節可動マネキンや、人型ロボット等人型機械は歩行や手の動きといった四肢を動かすものであった。上記特許文献1に記載のマネキン人形も同様である。
【0005】
四肢の動きは自然な動きをするものがあるが、腰部から脚部にかけて部位の動きがぎこちないの
で、どうしても自然な美しさを表現することができなかった。本発明はこのような人型機械に対し、より人間に近い自然な動きを持たせるために、腰部と脚部が連動することで、ファッションモデルのような魅力的な下肢の動きを有する人型機械を提供しようとするものである。
【課題を解決するための手段】
【0006】
以上の問題を解決するために、第一発明は、ファッションモデルがポーズをとる時、左右脚の交差動作時に、前方に振り出す脚側の股関節が振り出す脚に追随して前方に移動する動作に着目し、脚部の側方回転動作と、股関節の前後揺動が同期して連動することを特徴とする人型機械である。
【0007】
また、第二発明は、ファッションモデルがポーズをとる時、立脚に対し遊脚を股関節中心に側方
外転しながら外旋する動作時に、立脚側の股関節が上方移動する動作に着目し、脚の旋回動作と、
股関節の上下揺動が同期して連動することを特徴とする人型機械である。
【0008】
また、第三発明は、第一発明を実現するための骨格機構である。腰内部に人体の腰椎にあたる腰部支柱があり、この腰部支柱背部の上下に2本の横木を緊結して、股関節から腹部中央に渡るL字型リンク機構を、蝶番を介して左右に連結する。L字型リンク機構の底部は人体の股関節に相当し、底部下面に脚部が堅結する。このL字型リンク機構の両端に電動シリンダー両端を連結し、電動シリンダー内部のモータ駆動による伸縮運動によって、L字型リンク機構の内角を拡狭して、リンク機構底部に連結した脚部の側方回転動作を行う。
【0009】
また、腰部支柱背面の下部横木に左右対称に2つの回転モータを設置し、このモータ軸と股
関節から腹部中央に渡るL字型リンク機構を小型リンク機構によって連結する。これにより回転モータの回転運動を逆方向に変換してL字型リンク機構に伝達し、L字型リンク機構全体の回旋運動を行う。左右のL字型リンク機構を交互に内外旋することで、人体の股関節に相当する左右L字型リンク機構底部の前後揺動運動を実現する。
【0010】
電動シリンダーと回転モータは多軸同時制御システムの制御基盤に通信線で接続されており、運動データが送信される。これにより、脚部の側方回転動作と股関節の前後揺動運動を連動する。
【0011】
また、第四発明は、第二発明を実現するための骨格機構である。腰部支柱背面の下部横木に
固定した回転モータによる回転運動を、モータ軸に連結した小型リンク機構によって逆方向に
変換し、股関節から腹部中央に渡るL字型リンク機構全体を旋回運動する。これにより、L字型リ
ンク機構底部に堅結する脚を旋回運動する。
【0012】
また、L字型リンク機構の両端に連結した電動シリンダーの伸縮運動によって、左右のL字型リ
ンク機構の内角を交互に拡狭して、人体の股関節に相当する左右L字型リンク機構底部の上下揺動運動を実現する。
【0013】
電動シリンダーと回転モータは多軸同時制御システムの制御基盤に通信線で接続されており、運動データが送信される。これにより、脚部の回旋動作と股関節の上下揺動運動を連動する。
【0014】
また、第五発明は、ファッション用マネキンとしての美観を維持することを目的に、足首をより
細く見せるため、脚骨格を構成する大腿の平行リンクと下腿の平行リンクを膝部で連結し、大腿と下腿の運動を司る2台の電動シリンダーを全て大腿平行リンクの両脇に配置することで、股屈曲・屈伸と膝屈曲・屈伸の運動性能と、脚足首を細く見せる美観を両立した機構を有することを特徴とする人型機械である。
【0015】
大腿平行リンクの両脇に配置する2台の電動シリンダーのうち、内側は股屈曲・屈伸を担い、外側は膝屈曲・屈伸を担う。2台の電動シリンダーとも上端部は大腿背部の平行リンク構成部材の上部付近を体側方向に貫通するシャフトに連結している。内側の電動シリンダーの下端部は大腿を構成する平行リンクの対角上に、大腿底部の平行リンク構成部材を貫通する金属製シャフトに連結している。電動シリンダーの伸縮により、大腿を構成する平行リンクが内角を拡狭することで、脚を前後に振る動作を行う。
【0016】
外側の電動シリンダーの下端部は、下腿背部の平行リンク構成部材上部付近から延長した部材を貫通するシャフトに連結している。外側の電動シリンダー伸縮により、下腿を構成する平行リンクの内角が拡狭することで、膝の曲げや伸びを行う。
【0017】
電動シリンダーは多軸同時制御システムの制御基盤に通信線で接続されており、運動データが送信される。これにより、脚部の股屈曲・屈伸と膝屈曲・屈伸を連動する。
【発明の効果】
【0018】
第一発明によれば、マネキンや人形、ロボットなど人型機械に対し、ファッションモデルが地面
の一線上に足先を揃えてポーズをとる時に必要な脚部の側方回転動作と股関節の前後揺動が同期して連動することを付与することができる。
【0019】
第二発明によれば、マネキンや人形、ロボットなど人型機械に対し、ファッションモデルが片
足を開いて決めのポーズをとる時に必要な脚の旋回動作と股関節の上下揺動が同期して連動する動きを付与することができる。
【0020】
第三発明によれば、人型機械の腰部と脚部の機構に対し、脚部の側方回転動作と左右股関節の前
後揺動を同期して連動させることができるので、第一発明のように、ファッションモデルのような動きを人型機械の腰部と脚部に付与することが可能になる。
【0021】
第四発明によれば、人型機械の腰部と脚部の機構に対し、脚部の回旋動作と左右股関節の上下揺
動を同期して連動させることができるので、第二発明のように、ファッションモデルのような動きを人型機械の腰部と脚部に付与することが可能になる。
【0022】
第五発明によれば、人型機械の脚部に対し、脚足首を細く見せる美観を維持しながら、股屈曲・
屈伸と膝屈曲・屈伸を同期して連動する動きを人型機械の脚部に付与することが可能になる。
【発明を実施するための最良の形態】
【0023】
次に発明の実施の形態を説明する。
ファッションモデルのように魅力的な下肢の動きを有する腰部と脚部の動きとは、一つは、脚
部が側方回転と股関節の前後揺動が連動することである。これにより、左右脚つま先が交差すると
同時に、前方に振り出す脚側の股関節が振り出す脚に追随していくモデルの決めのポーズをとるこ
とができる。
【0024】
もう一つは、脚の旋回動作と股関節の上下揺動が連動することである。これにより、立脚に対し、
遊脚を股関節中心に側方外転しながら外旋すると同時に、立脚側の股関節が上方移動するモデルの
決めのポーズをとることができる。この発明における実施形態の下肢姿勢の平面図と正面図を図
1に示す。
【0025】
図1(a)は、人が立位で弛緩した時の中立的な状態で、股関節101、102が股関節101、102を結ぶ基準線105上に在る。同時につま先103、104が中心線106から等距離である。
【0026】
図1(b)は図1(a)の状態から、つま先104を前方に踏み出した時のファッションモデルのポーズである。この時、左脚と右脚は交差し、つま先103とつま先104は中心線106上に並ぶ。同時に前方に踏み出した脚に追随して股関節102は前方に移動する。
【0027】
図1(c)は図1(a)の状態から、右脚を軸足とし、左脚を側方外転しながら外旋して、膝を少し曲げた時のファッションモデルのポーズである。この時、股関節102は左脚に追随し、下方に移動する。
【0028】
この腰部と脚部の動きを表現における実施形態の機構構成の斜視図を図2(a)に示す。この機構は腰部モジュール201と右脚部モジュール202、左脚部モジュール203によって構成される。腰部モジュールと左右脚部モジュールはボルトとナットで堅結される。
【0029】
図2(b)は図2(a)の腰部・脚部モジュールに胸部モジュール213、腕部モジュール215・216、頭部モジュール214を組み込んだ全身タイプの関節駆動型マネキンの平面図と右側面図である。頭部モジュール214が多軸同時制御システムである。各々のモジュールに組み込まれている回転、外旋、屈伸等の運動を駆動する各アクチュエータ(電動シリンダー、直流回転モータ等)に、通信線217を経由して動作データを送信する。また、各アクチュエータにはポテンショメータが設置されており、アクチュエータの動作量を検知して多軸同時制御システムにフィードバックする。多軸同時制御システムには電線218により、電力を供給する。
【0030】
ファッションモデルの代表的なポーズと同様の動作を行う時の機構を図3(a)、(b)の
平面図と正面図に示す。図3(a)は、右脚つま先301と左脚つま先302が地面の線303
上で交差すると同時に、前方に振り出す脚側の股関節304が振り出す脚に追随する時の機構を示
している。図3(b)は立脚に対し、遊脚305を股関節304中心に側方外転しながら外旋す
ると同時に、立脚側の股関節305が上方移動する時の機構を示している。
【0031】
この実施形態の機構における腰部モジュールの構成を図4に示す。図4(a)は右上前方視点での斜視図で、図4(b)は図4(a)同一物の左上後方視点での斜視図である。また、脚の側方回転時における腰部モジュールの状態を表す正面図を図5に示す。さらに、脚の旋回時における腰部モジュールの状態を表す平面図と斜視図を図6に示す。
【0032】
脚部の側方外転・内転を行うのが、骨格部材401・402と電動シリンダー403のグループである。電動シリンダー403の両端が骨格部材401・402と連結しており、図5(a)のように、電動シリンダー403が縮むと骨格部材401が側方外転する。この時、骨格部材401に堅結している左脚部モジュール全体も側方外転する。図5(b)のように、電動シリンダー403が伸びると骨格部材401が側方内転する。この時、骨格部材401に堅結している左脚部モジュール全体も側方内転する。
【0033】
腰部モジュールの背骨にあたるのが支柱404である。支柱404には骨格部材405・406が堅結一体化している。404、405、406のグループと401,402,403のグループは蝶番407によって連結されている。骨格部材406には直流回転モータ407、408が堅結する。モータの回転運動はモータのシャフトに連結したリンク部材409・410・411から成るリンク機構によって伝達され、リンク部材411に結合した骨格部材402に対し、蝶番412を中心に逆回転運動に変換される。
【0034】
これにより、図6(a)のように、直流回転モータ407のシャフトの内側への回転が、リンク機構を介して骨格部材401・402と電動シリンダー403のグループ全体を外側へ旋回させる。骨格部材401には左脚部モジュールが堅結しているので、左脚全体を外旋させる。
【0035】
また、図6(b)のように、直流回転モータ407のシャフトの外側への回転が、リンク機構を介して骨格部材401・402と電動シリンダー403のグループ全体を内側へ旋回させので、左脚全体を内旋させる。
【0036】
この実施形態の機構における脚部モジュールの構成を図7に示す。図7(a)は脚部モジュールの左下後方視点での斜視図で、図7(b)は図7(a)と同一物の左上前方視点からの斜視図である。また、脚の股屈曲・屈伸時における脚部モジュールの状態を表す左側面図と正面図を図8に示す。さらに、脚の膝屈曲・屈伸時における脚部モジュールの状態を表す正面図と右側面図を図9に示す。
【0037】
このモジュールは大腿の平行リンクを構成するグループと下腿の平行リンクを構成するグループに大別される。大腿の平行リンクは骨格部材701・702・703、704がシャフト705・706・707・708によって連結される。下腿の平行リンクは骨格部材709・710・711、712がシャフト714・715・716・717によって連結される。大腿下部の骨格部材702と下腿上部の骨格部材709はボルトとナットによって堅結している。
【0038】
股屈曲・屈伸を行う電動シリンダー717と膝屈曲・屈伸を行う電動シリンダー718を大腿に組み込む。これにより下腿にアクチュエータを組み込む必要がなくなり、細い足首を実現できる。
電動シリンダー717・718の上端部はシャフト719によって大腿背部の骨格部材704の上方に連結している。電動シリンダー717の下端部は大腿下部の骨格部材702に連結している。
【0039】
図8(a)のように、電動シリンダー717が縮むと脚全体が股関節を中心に後方に移動する(股屈曲)。図8(b)のように、電動シリンダー717が伸びると脚全体が股関節を中心に前方に振り出される(股屈伸)。
【0040】
電動シリンダー718の下端部は部材720に連結している。部材720は部材721に、部材721は部材722に、部材722は下腿骨格部材712に緊結している。
図9(a)のように、電動シリンダー718が縮むと膝が伸びる(膝屈伸)。図9(b)のように、電動シリンダー718が伸びると膝が曲がる(膝屈曲)。
【0041】
実施形態の効果
この発明の実施形態における表現原理によれば、マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように情動に訴求する美しい動きをさせることができる。
【0042】
この発明の実施形態における機構構成と仕組によれば、左右脚が交差すると同時に前方に振
り出す脚側の股関節が追随する連動や、立脚側の股関節が上方移動すると同時に、遊脚を股関節
中心に側方外転しながら外旋する連動を可動制御できるので、ファッションモデルのようなポー
ズをとることが可能になる。
【産業上の利用可能性】
【0043】
図2(b)はこの発明を適用した関節駆動型マネキンの全身モデルである。この全身モデル機構に外装を施した上で、ディスプレイしたい衣服を着衣することで、より現実に近い状態で衣服を見せられるため、ファッション産業でのマネキンに適用できる。
【図面の簡単な説明】
【0044】
【図1】この発明の実施動作の過程を平面と正面から表した図である。
【図2】この発明の実施機構の構成を表した斜視図と平面図と正面図である。
【図3】この発明の実施機構の動作を表した平面図と正面図である。
【図4】この発明の実施機構の仕組みを表した斜視図である。
【図5】この発明の実施機構の仕組みを表した正面図である。
【図6】この発明の実施機構の仕組みを表した平面図と斜視図である。
【図7】この発明の実施機構の仕組みを表した斜視図である。
【図8】この発明の実施機構の仕組みを左側面から表した図と正面図である。
【図9】この発明の実施機構の仕組みを右側面から表した図と正面図である。
【符号の説明】
【0045】
101 右股関節
102 左股関節
103 右つま先
104 左つま先
105 左右股関節を結ぶ線
106 身体の中心線
201 腰部モジュール
202 右脚モジュール
203 左脚モジュール
211 左脚モジュールと台の固定部品
212 台
213 胸部モジュール
214 頭部モジュール
215 左腕モジュール
216 右腕モジュール
217 制御通信ケーブル
218 電気コード
301 右つま先
302 左つま先
303 身体の中心線
304 左股関節
305 左股関節
401 L型リンク機構底部
402 L型リンク機構垂直部
403 電動シリンダー
404 腰部支柱
405 横木上
406 横木下
407 モータ
408 モータ
409 小型リンク機構部品
410 小型リンク機構部品
411 ヒンジベース
412 蝶番
701 大腿平行リンク上部
702 大腿平行リンク下部
703 大腿平行リンク前部
704 大腿平行リンク背部
705 シャフト
706 シャフト
707 シャフト
708 シャフト
709 下腿平行リンク上部
710 下腿平行リンク下部
711 下腿平行リンク前部
712 下腿平行リンク背部
713 シャフト
714 シャフト
715 シャフト
716 シャフト
717 電動シリンダー
718 電動シリンダー
719 シャフト
720 電動シリンダー留め
721 電動シリンダー留め固定具
722 電動シリンダー留め固定具
【特許請求の範囲】
【請求項1】
脚部の側方回転動作と、股関節の前後揺動が同期して連動することを特徴とする人型機械。
【請求項2】
脚の旋回動作と、股関節の上下揺動が同期して連動することを特徴とする人型機械。
【請求項3】
股関節から腹部中央に渡るL字型リンク機構の両端に連結したアクチュエータの伸縮によって、
L字型リンク機構の股関節に連結した脚部の側方回転動作と、腰部支柱の背面下部に固定したアクチュエータの回転運動を、L字型リンク機構に伝達し、左右L字型リンク機構を交互に回旋して、
左右股関節の前後揺動を実現し、脚部の側方回転動作と股関節の前後揺動を同期して連動する機構
を有することを特徴とする人型機械。
【請求項4】
腰部支柱の背面下部に固定したアクチュエータの回転運動を、リンク機構を介して連結した股関節から腹部中央に渡るL字型リンク機構に伝達し、L字型リンク機構の股関節に連結した脚部の回旋動作と、L字型リンク機構の両端に連結したアクチュエータの伸縮によって左右股関節の上下揺動を実現し、脚の旋回動作と、股関節の上下揺動が同期して連動することを特徴とする人型機械。
【請求項5】
脚骨格を構成する大腿の平行リンクと下腿の平行リンクを膝部で連結し、大腿と下腿の運動を司
るアクチュエータを全て大腿部に配置することで、脚足首を細く見せる美観を維持しながら、股屈曲・屈伸と膝屈曲・屈伸を同期して連動する機構を有することを特徴とする人型機械。
【請求項1】
脚部の側方回転動作と、股関節の前後揺動が同期して連動することを特徴とする人型機械。
【請求項2】
脚の旋回動作と、股関節の上下揺動が同期して連動することを特徴とする人型機械。
【請求項3】
股関節から腹部中央に渡るL字型リンク機構の両端に連結したアクチュエータの伸縮によって、
L字型リンク機構の股関節に連結した脚部の側方回転動作と、腰部支柱の背面下部に固定したアクチュエータの回転運動を、L字型リンク機構に伝達し、左右L字型リンク機構を交互に回旋して、
左右股関節の前後揺動を実現し、脚部の側方回転動作と股関節の前後揺動を同期して連動する機構
を有することを特徴とする人型機械。
【請求項4】
腰部支柱の背面下部に固定したアクチュエータの回転運動を、リンク機構を介して連結した股関節から腹部中央に渡るL字型リンク機構に伝達し、L字型リンク機構の股関節に連結した脚部の回旋動作と、L字型リンク機構の両端に連結したアクチュエータの伸縮によって左右股関節の上下揺動を実現し、脚の旋回動作と、股関節の上下揺動が同期して連動することを特徴とする人型機械。
【請求項5】
脚骨格を構成する大腿の平行リンクと下腿の平行リンクを膝部で連結し、大腿と下腿の運動を司
るアクチュエータを全て大腿部に配置することで、脚足首を細く見せる美観を維持しながら、股屈曲・屈伸と膝屈曲・屈伸を同期して連動する機構を有することを特徴とする人型機械。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−291502(P2009−291502A)
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願番号】特願2008−150027(P2008−150027)
【出願日】平成20年6月9日(2008.6.9)
【出願人】(503452867)有限会社ピノキオ (10)
【出願人】(592216384)兵庫県 (258)
【出願人】(597167748)財団法人新産業創造研究機構 (20)
【Fターム(参考)】
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願日】平成20年6月9日(2008.6.9)
【出願人】(503452867)有限会社ピノキオ (10)
【出願人】(592216384)兵庫県 (258)
【出願人】(597167748)財団法人新産業創造研究機構 (20)
【Fターム(参考)】
[ Back to top ]