
人工呼吸器を運転する方法
【課題】必要に適合したガス量の調量を人工呼吸器のために可能にする方法を提供する。
【解決手段】呼気弁3を備えた、高頻度人工呼吸用の人工呼吸器を制御する方法において、貫流値36を予め調節された貫流スタート値から段階的に第1のステップ幅42で減少させ、呼気弁3の負荷状況37を検出し、この際に呼気弁3の負荷状況37が第1の閾値44を超過することを監視し、呼気弁3の負荷状況37の第1の閾値44の超過時に、貫流値36のさらなる減少を停止し、呼気弁3の負荷状況37が第2の閾値54を超過することを監視し、呼気弁3の負荷状況37の第2の閾値54の超過時に、貫流値36を第2のステップ幅43で高めるようにした。
【解決手段】呼気弁3を備えた、高頻度人工呼吸用の人工呼吸器を制御する方法において、貫流値36を予め調節された貫流スタート値から段階的に第1のステップ幅42で減少させ、呼気弁3の負荷状況37を検出し、この際に呼気弁3の負荷状況37が第1の閾値44を超過することを監視し、呼気弁3の負荷状況37の第1の閾値44の超過時に、貫流値36のさらなる減少を停止し、呼気弁3の負荷状況37が第2の閾値54を超過することを監視し、呼気弁3の負荷状況37の第2の閾値54の超過時に、貫流値36を第2のステップ幅43で高めるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人工呼吸器を運転する方法に関する。
【背景技術】
【0002】
患者、特に新生児及び未熟児を機械的に呼吸させる場合、呼吸のためには、調整された交番振動で患者に呼吸空気を供給する人工呼吸形態(Beatmungsform)が使用される。呼吸圧に対して調整された交番振動によって、肺領域の改善された空気供給、ひいては、患者の血液循環系への改善された酸素/二酸化炭素・ガス交換が達成され、しかもこの場合呼吸圧のベースレベルが高められることはない。このような人工呼吸形態は高頻度人工呼吸と呼ばれ、以下においては単にHF呼吸と呼ぶ。成人の生理学的な呼吸は、典型的には毎分9〜18の呼吸数の範囲にあり、これによって0.15〜0.3Hzの呼吸頻度が生ぜしめられる。未熟児又は新生児は、毎分60〜120の呼吸数で呼吸し、これは1〜2Hzの呼吸頻度に相当する。高頻度呼吸の調整された頻度(以下においてはHF頻度と呼ぶ)は、毎秒5〜20振動の範囲にあり、つまり明らかに生理学的な呼吸頻度の上にある。HF呼吸は、HF人工呼吸器の出力部において連続的に、HF頻度に追従する圧力振幅の変動を生ぜしめ、この変動は、吸気と呼気とから成る生理学的な交番と、平均気道圧とに重畳される。HF呼吸の運転形式の制御及び調整のための入力パラメータとして、HF頻度、平均気道圧、HF振動の圧力振幅及び、吸気の時間と呼気の時間との比に相当するI:E比が、制御兼調整ユニットに供給される。
【0003】
頻度、圧力振幅、平均気道圧及びI:E比から成るこの入力パラメータは、使用者によって治療上の考え及び患者の体質によって導き出され、一方では、使用者によって操作ユニットにおける直接的な調節値として調節されることができ、他のバリエーションでは、調節値は他のパラメータから導き出されることができる。DE102006048680B3には、HF頻度とHF振動の圧力振幅とを調節された一回呼吸量から導き出すことができる方法が記載されている。WO2007142642A1には、人工呼吸器のための調整されたHF頻度のリズムで圧力変動を制御する方法が記載されている。HF呼吸を使用するための人工呼吸器は、DE3417954A1に記載されており、この場合患者用供給管にはHF頻度のリズムで弁装置と接続された発生器を用いて、正弦波状の正の交番圧力振幅が接続供給され、吸込みノズルを用いて呼気の能動的な吸出しによって、負の交番圧力振幅が生ぜしめられる。患者用供給管は人工呼吸器を患者と接続しており、患者の肺には圧力交番変動が、気管内挿入管又は呼吸マスクを用いてもたらされる。制御兼調整ユニットは、入力パラメータであるHF頻度、平均気道圧、圧力振幅及びI:E比を、圧力調整及び貫流調整のため及び例えば吸込みノズルや弁装置のような人工呼吸器構成部材の制御のために必要な調節値に、変換する。患者において空気圧交番変動を生ぜしめるために、空気容量は患者用供給管を通して患者に対して流入流出されねばならない。患者用供給管は、供給される空気量のための動的な空気抵抗であり、この空気抵抗は低域フィルタによって描くことができる。その結果、患者における圧力交番変動の供給に際しては、頻度の増大に連れて、そのために必要な流速度が過大に上昇することになる。患者の口におけるガス供給管における付加的な空気抵抗及び空気容量、並びにそれに基づく圧力降下を回避するために、HF呼吸では多くの場合、患者のそばに配置される貫流値検出用のセンサが省かれる。例えば種々様々な患者タイプや種々異なったチューブ系のために、例えば抵抗力及び適応性のような、空気に関するパラメータのバリエーションの多岐にわたる組合せ可能性を、HF呼吸によって適切に可能にするために、HF人工呼吸器は、過剰のガス容量とひいては過剰の流速度で運転され、これによって、意図されかつ調節された圧力交番振幅とHF頻度とを如何なる患者においても、保証することができる。このようなガス過剰の運転によって、調量されたガス量は呼吸調節のためよりも多くが必要になる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】DE102006048680B3
【特許文献2】WO2007142642A1
【特許文献3】DE3417954A1
【発明の概要】
【発明が解決しようとする課題】
【0005】
ゆえに本発明の課題は、必要に適合したガス量の調量を人工呼吸器のために可能にする方法を、提供することである。
【課題を解決するための手段】
【0006】
この課題を解決するために本発明の方法では、呼気弁を備えた、高頻度人工呼吸用の人工呼吸器を制御する方法において、貫流値を予め調節された貫流スタート値から段階的に第1のステップ幅で減少させ、呼気弁の負荷状況を検出し、この際に呼気弁の負荷状況が第1の閾値を超過することを監視し、呼気弁の負荷状況の第1の閾値の超過時に、貫流値のさらなる減少を停止し、呼気弁の負荷状況が第2の閾値を超過することを監視し、呼気弁の負荷状況の第2の閾値の超過時に、貫流値を第2のステップ幅で高めるようにした。
【0007】
また本発明の有利な態様では、呼気弁を備えた人工呼吸器を制御する方法において、貫流値を段階的に減少させ、呼気弁の負荷状況を検出し、この際に呼気弁の負荷状況を検出し、呼気弁の負荷状況を許容誤差範囲内に保つようにした。
【0008】
本発明の別の有利な方法は、請求項3以下の従属請求項に記載されている。
【発明の効果】
【0009】
HF呼吸を実施するために構成された人工呼吸器は、アクチュエータとセンサと制御エレメントとから成っている。このような人工呼吸器は、HF呼吸による呼吸のために特別に構成された人工呼吸器、いわゆるHF人工呼吸器であってよいが、しかしながらまた、成人の患者のための0.15〜0.3Hzの通常の呼吸頻度もしくは未熟児又は新生児のための1〜2Hzの通常の呼吸頻度の他に、それに加えて、毎秒5〜20の範囲における圧力交番呼吸を特殊なHF呼吸形態として備えるように、構成されている人工呼吸器であってもよい。HF呼吸のために必要な構成部材としては、ファン駆動装置として形成された、吸気弁又は空気源、呼気弁、吸込みノズル(エジェクタ)、パラメータ入力のための入力ユニット、並びに、運転形式及び運転形態を呼吸制御するための制御兼調整ユニットが挙げられる。さらに別の構成部材としては、ガス混合装置、ガス調量装置、貫流調整装置、貫流測定装置、圧力調整装置、圧力測定装置、弁制御装置、及び呼気弁の状態を監視する構成部材が挙げられる。この場合吸込みノズルは別個に運転及び制御されてもよいし、又は吸込みノズルの運転及び制御は、別個に運転及び制御されてもよいし、又は吸込みノズルの運転及び制御を、呼吸制御、HF呼吸の制御並びに圧力及び貫流量調整と組み合わせて行うこともできる。吸込みノズルの制御されない運転は、人工呼吸器の呼気分岐部において空気量を連続的に取り出す。この空気量は吸気として、人工呼吸器から新鮮ガス量として供給されねばならない。正の圧力交番振幅を有するHF呼吸の実施は、原則的には吸込みノズルなしでも可能であるが、しかしながら負の圧力交番振幅は、このような構成では対応不能である。入力ユニットを介して伝達される、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットは、患者の体質を考慮して使用者の治療上の考えから導き出され、HF呼吸を運転するための基準値を決定する。これらの基準値から、圧力のための目標基準値及び貫流量のための目標基準値を規定することができ、これらの目標基準値は、呼吸制御装置によって呼気弁に送られ、呼吸の予め調節された形態において実現される。吸気は、接続された吸気弁と吸気側のガス調量との関連において、接続された吸気弁として又はファン駆動装置として形成されて、正弦波状の正の交番圧力振幅が接続供給され、吸込みノズルを用いて、呼気の能動的な吸出しによって負の交番圧力振幅が生ぜしめられる。本発明による方法は、サイクル形式及び/又は連続形式で、予め調節された貫流値の降下を実施し、閉鎖された調整ループにおいて呼気弁の状態を制御回路におけるフィードバックとして使用する。
【0010】
弁及び弁装置の状態監視の可能性は、従来技術に基づいて公知であり、例えばDE10347886B3には調量弁及び遮断弁の監視について記載されている。DE10126821C1には、弁閉鎖速度の検出と制御技術的なフィードバックとを用いた、弁閉鎖手段を備えた弁の制御について記載されている。
【0011】
人工呼吸器のガス量を消費に合わせて調量する方法の第1実施形態では、制御兼調整ユニットにおけるHF呼吸のための基準値から、呼吸形態のための調節値、貫流量の調量、吸気弁及び呼気弁のための調節値が求められ、アクチュエータ及び構成部材へとさらに導かれ、そしてHF呼吸運転が行われる。これらの調節値は、ガス調量が、HF呼吸の調整される圧力振幅に関連してガス過剰を有するように、選択されている。第1のステップでは、ガス過剰を減じるために、第1の連続ループにおいて機械式の呼吸の各呼吸サイクルで、貫流量の段階的な降下が実施される。次のステップにおいて呼気弁の状態が検出される。第1実施形態において、第1の連続ループにおける貫流量の段階的な降下は、呼気弁の検出された状態が所定の第1の閾値を超過、つまり上回るまで、続けられる。この第1の閾値は、呼気弁がガス欠乏時に圧力交番振幅を生ぜしめるために過度に高い機械的な負荷を伴う運転状態において運転されることによって、生じる。呼気弁の閾値が超過されると、貫流量は第2のステップ幅をもって再び高められる。呼気弁の状態の検出は、本発明では連続的に行うことも又はサイクルの形で断続的に行うこともできる。
【0012】
貫流量の降下及び上昇は、互いに連続した2つの呼吸サイクルの間における交番時点において実施することができる。このような実施形態の他に、本発明では、貫流量の降下及び上昇を、目下の呼吸サイクル中に行うことも互いに連続した2つの呼吸サイクルの間に一緒に行うことも可能である。さらに本発明の別の実施形態では、貫流量の上昇又は降下を、貫流量の上昇又は降下のない所定の呼吸サイクル数の終了後に、行うことが可能であり、又は、貫流量の上昇又は降下を呼吸リズムとは非同期で行うような実施形態も可能である。呼気弁の負荷はこれによって再び減じられ、次いで再び所定の第1の閾値を下回る。次いで第1の連続ループは第1のステップへの移動と共に続けられる。第1の連続ループには第2の連続ループが重畳されており、この第2の連続ループにおいて、HF呼吸のための目標基準値及び使用者による目標基準値の変化が応答され、制御兼調整ユニットにさらに導かれる。
【0013】
本発明の第2実施形態では、第2のステップ幅は呼吸の経過において、呼気弁の所定の第1の閾値の超過毎に、次いで行われるこの第2のステップ幅による貫流量の上昇に伴って、減じられる。これによって、貫流量の大きな変動を甘受する必要なしに、弁状況は所定の第1の閾値に接近させられる。この場合第2のステップ幅は、第1のステップ幅の値によって与えられているような値にだけ減じられる。時間の経過において最適化された、貫流量と弁状況とを相互に適合させるための実地に即した値は、第2のステップ幅のためには、第1のステップ幅の50%〜150%の値で生ぜしめられる。第2のステップ幅の減少は、所定の第1の閾値の超過が繰り返された場合に、停止され、そしてさらなる経過において第1のステップ幅による貫流量の降下が所定の第1の閾値を超過しなくなるや否や、再び続けられる。
【0014】
所定の第1の閾値の超過時に貫流量を高める代わりに、本発明の第3実施形態では、貫流量はこの第1の閾値に保つことも可能である。貫流量の上昇は、所定の第2の閾値が超えられるやいなや、行われる。このようにすると、弁は第1の閾値と第2の閾値との間における帯域において運転される。
【0015】
第2及び第3の実施形態の特別な構成では、第1及び第2のステップ幅の変化が所定のスタート値から、呼吸の経過において、調整によって行われ、この場合には弁監視ユニットが、呼気弁の負荷状況を許容誤差帯域に保つ調整装置として構成される。閉鎖された制御回路において調整装置には、呼気弁の現在の負荷状況が実際値として供給され、負荷状況の限界値が目標値として供給される。調整装置はその出力部において第1及び/又は第2のステップ幅のための値を、その調整強さ及び調整特性に相応して与え、これによって貫流量は連続的に閉鎖された制御回路において増減され、呼気弁の負荷状況は、基準値の範囲内に保たれる。調整装置はこの場合有利には、比例動作と積分動作を組み合わせた制御特性を備えたPI制御装置として構成されており、これによって調整偏差を最小にすること及び、負荷状況を、第3実施形態においては、第1の閾値と第2の閾値との間における帯域に保つこと、もしくは第2実施形態においては、呼気弁の負荷状況を僅かな変動をもって第1の閾値の下に保つことが可能である。
【0016】
本発明の第4実施形態では、呼気弁の目標調節値は、呼気弁の状態を求めるために呼気弁の状態のための入力値として使用される。この目標調節値は、呼気弁の通電のための目標電流値として、頻度、圧力振幅、平均気道圧及びI:E比のための目標基準値から圧力測定装置及び圧力調整装置を介して直に生ぜしめられ、制御兼調整ユニットにおいて使用される。圧力調整装置は、圧力目標値を、圧力目標値と相関関係にある閉鎖力の弁固有値と、閉鎖力のために必要な磁界強さとに変換する。目標電流値は制御兼調整ユニットにおいて、最大励磁電流、最大投入接続長さ及び最大弁温度のような、呼気弁の確実な運転のための境界条件を考慮して分析される。目標電流値が所定の目標電流閾値を上回ると、このことは呼気弁の第1の所定の閾値の超過として評価され、その結果貫流量は本発明によれば連続した第1のループにおいて高められる。
【0017】
第5実施形態では、実際電流値が呼気弁を励磁するために測定されて検出され、呼気弁の状態のための入力値として使用され、これによって貫流量の降下後における呼気弁の更新された状態を検出することができる。
【0018】
第6実施形態では、運転中における呼気弁の巻線抵抗が測定されて検出され、呼気弁の状態のための状態値として使用され、これによって呼気弁の状態を検出することができる。巻線抵抗値は、巻線材料の温度依存に関する、無通電状態のコイルにおける基準抵抗との比較において、呼気弁の加熱のための値である。
【0019】
第7実施形態では、呼気弁の励磁コイルの相互誘導電圧が測定されて検出され、呼気弁の状態のための入力値として使用され、これによって呼気弁の状態を検出することができる。
【0020】
第8実施形態では、生じている弁温度が、1つのモデルを介して、つまり弁構造形式と励磁電流との関係を利用して、呼気弁の確実な運転のための境界条件を最大確実な運転温度との比較において考慮する、モデルを介して表示される。
【0021】
第9実施形態では、弁温度が温度センサによって検出され、呼気弁の確実な運転のための境界条件の考慮下で一緒に考慮される。また第10実施形態では、周囲温度が呼気弁の状態判断のために一緒に利用される。
【0022】
上に述べた10の実施形態は、一方では、弁状態監視によってガス量を減じるための独立した本発明の解決策である。またこれら10の実施形態を互いに組み合わせることも可能であり、これによって、呼気弁の監視品質もしくは監視精度をさらに改善することができる。
【0023】
本発明のさらに別の実施形態では、貫流スタート値が、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから、又はこのパラメータセットの変化から導き出される。例えばこの別の実施形態の変化実施形態では、一次関数の対応関係を使用して、5Hzの呼吸頻度において30l/minが生じ、10Hzの呼吸頻度において60l/minが生じ、20Hzの呼吸頻度において120l/minが生じる。
【0024】
本発明のさらに別の実施形態では、貫流量の降下の第1のステップ幅が、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから、又はこのパラメータセットの変化から導き出される。例えば第1のステップ幅は、この別の実施形態の変化実施形態では、貫流量の現在値又は平均値からパーセンテージで導き出すことができる。パーセンテージによって導き出すための実地に即した値は、例えば貫流量の10%の値である。極めて小さなステップ幅を回避するために、10%の値は、例えば1l/minの固定の最小ステップ幅と結び合わされることができる。
【0025】
本発明の別の実施形態では、貫流量の上昇の第2のステップ幅が、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから導き出される。例えば第2のステップ幅は、この別の実施形態の有利な変化実施形態では、貫流量の現在値又は平均値からパーセンテージで導き出すことができる。パーセンテージによって導き出すための実地に即した値は、例えば貫流量の10%の値である。極めて小さなステップ幅を回避するために、10%の値は、例えば1l/minの固定の最小ステップ幅と結び合わされることができる。
【0026】
別の有利な実施形態では、貫流量の上昇の第2のステップ幅は、弁の負荷状態と所定の第1の閾値との間における現在の間隔もしくは距離から導き出すことができる。
【0027】
別の実施形態では、貫流量の上昇の第1のステップ幅は、弁の負荷状態と所定の閾値との間における現在の間隔もしくは距離から導き出すことができる。
【0028】
本発明のこの別の実施形態の有利な変化実施形態では、貫流量の上昇の第2のステップ幅は、第1のステップ幅から及び/又は第2のステップ幅のそれまでの経過から導き出されて、一連の呼吸サイクルにおいて適合される。
【図面の簡単な説明】
【0029】
【図1】HF呼吸のための人工呼吸器の構成を概略的に示す図である。
【図2】呼気弁監視装置の第1実施形態を示す図である。
【図3】呼気弁監視装置の第2実施形態を示す図である。
【図4】弁状態に関連した貫流量の適合の時間的な経過を示す第1実施形態を示す線図である。
【図5】弁状態に関連した貫流量の適合の時間的な経過を示す第2実施形態を示す線図である。
【発明を実施するための形態】
【0030】
次に図面を参照しながら本発明の実施の形態を説明する。
【0031】
図1には、人工呼吸器の構成部材が概略的に示されており、この人工呼吸器は、HF呼吸を実施するために構成されている。人工呼吸器1は複数の構成部材、すなわち吸気弁2、呼気弁3、吸込みノズル4、入力ユニット5、制御兼調整ユニット7、ガス混合ユニット8、ガス調量ユニット9、貫流調整装置10、貫流測定装置11、圧力調整装置12、圧力測定装置13、弁制御装置14、弁監視ユニット15、吸気用ガス接続部91、呼気用ガス接続部92及びガス流出部93から成っている。さらに調節値入力装置6が設けられており、この調節値入力装置6を用いて、高頻度呼吸(Hochfrequenzbeatmung)のために重要な調節値17,18,19,20が1つのパラメータセット16として、制御兼調整ユニット7内における圧力調整装置12及び貫流調整装置10に達する。パラメータ入力のための入力ユニット5は、ユーザインターフェースと組み合わされて形成されており、4つの調節値17,18,19,20のための調節値入力装置6を形成している。4つの調節値17,18,19,20は、第1の調節値17として高頻度呼吸のための頻度の目標値(fHF-ventilation)、第2の目標値18として圧力振幅(Pamplitude)、第3の調節値19として平均気道圧(MAP)、第4の調節値20としてI:E比(Ratio I:E)である。これらの調節値、頻度17、圧力振幅18、平均気道圧19及びI:E比20は、HF呼吸の開始及び実施のための目標規準値21として働く。貫流調整装置10、圧力調整装置12及び調節値入力装置6は、制御兼調整ユニット7の直ぐ近くに接続されている。制御兼調整ユニット7は制御命令を弁制御装置14に伝達し、入力ユニット5から目標規準値21を得る。弁監視ユニット15は、弁制御装置14の1構成部分として構成されていて、貫流量上昇又は貫流量減少を調節する。貫流量の調節はこの場合、本発明では一方では所定のステップ幅によって行うことができ、他方では呼気弁3の負荷状況が閉鎖された制御回路(閉ループ)に含まれているような構成では、可変のステップ幅によって行うことができる。弁監視ユニット15はこのような構成では、コントローラを備えた弁調整ユニットとして構成されている。患者47は吸気側のガス接続部91と呼気側のガス接続部92とを介して、供給管48を用いて、図示の実施例ではチューブ系を用いて、HF人工呼吸器1と接続されている。呼気は吸込みノズル4を介して供給管48から吸い出され、ガス流出部93を介して周囲に排出される。
【0032】
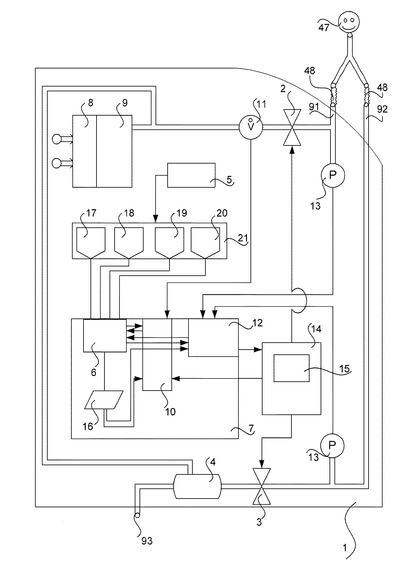
図2には、図1に示された弁制御装置14及び呼気用の弁監視ユニット15の第1実施形態が示されている。図2において、図1におけると同じ構成部材には同一符号が使用されている。この第1実施形態では、制御兼調整ユニット7において、呼気弁3の第1の調節部材70の入力部における調節値、つまり目標電流値(Iex-V_soll)22が、呼気弁3の現在状態及び負荷状況のための入力値として使用される。
【0033】
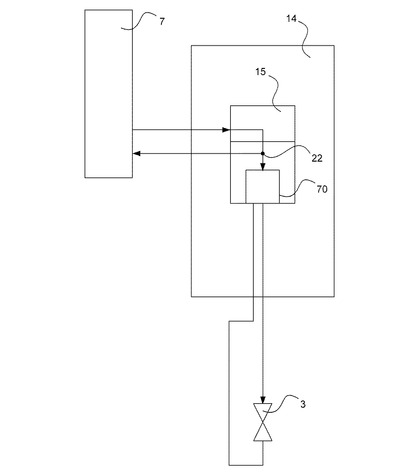
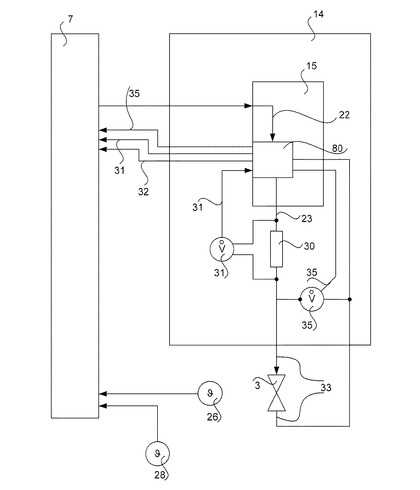
図3には、図1に示された弁制御装置14及び呼気用の弁監視ユニット15の第2実施形態が示されている。図3において、図1におけると同じ構成部材には同一符号が使用されている。この第2実施形態では、制御兼調整ユニット7から呼気弁3を制御するために第2の調節部材80の入力部に、目標電流値(Iex-V_soll)22が供給される。弁の巻線を通って流れる弁電流(Iex-V_ist)23が測定され、制御兼調整ユニット7に送られる。弁電流(Iex-V_ist)23は測定抵抗30において第1の測定電圧31として、弁制御装置14における電圧計を用いて検出され、制御兼調整ユニット7に送られる。
【0034】
第1の変化実施形態では、現在の電圧(Vex-V)33は、第2の電圧計35を用いて呼気弁3のコイルにおいて検出され、弁制御装置14に送られる。
【0035】
現在の電圧(Vex-V)33が呼気弁3のスイッチオン時に検出される場合には、この現在の電圧(Vex-V)33は、弁3の相互誘導電圧の1つの尺度である。第4実施形態では、呼気弁3の相互誘導電圧34は、呼気弁3の現在状態及び負荷状況のための入力値として使用され、制御兼調整ユニット7に送られる。
【0036】
第2の変化実施形態では、弁制御装置14において巻線抵抗(Rex-V)32を算出するために、現在の電圧(Vex-V)33と弁電流(Iex-V_ist)23とから成る組合せが使用される。巻線抵抗(Rex-V)32は、巻線材料の温度により変化する抵抗に関して、呼気弁3のコイルの加熱のための直接的な値であり、巻線抵抗32の所定の基準値との比較において呼気弁3の負荷状況を再現する。
【0037】
呼気弁3の巻線抵抗32は、呼気弁3の現在の状態と負荷状況とのための入力値として使用され、制御兼調整ユニット7に伝達される。
【0038】
さらに図3には第1の温度センサ26が呼気弁3の温度を監視するために配置されており、この第1の温度センサ26は単独で又は第2の温度センサ28との関連において、呼気弁3の状態監視のために利用されることができる。
【0039】
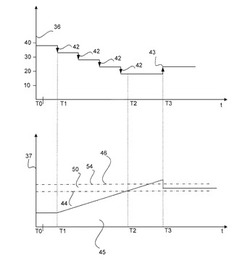
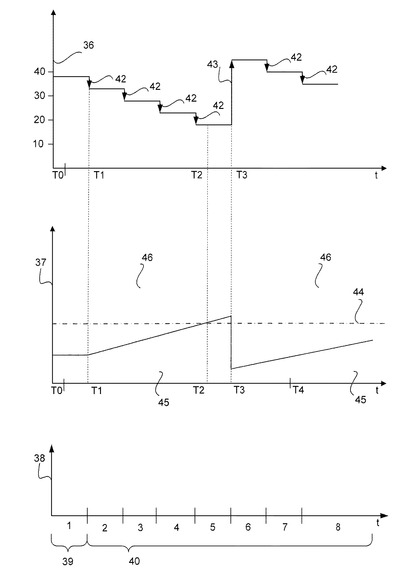
図4には、呼吸サイクル38の経過における、貫流調節値36と弁状態経過37との時間的な経過の一例が示されている。第1の呼吸サイクル39において、HF呼吸は時点TOにおいて過剰の貫流量をもってスタートし、貫流スタート値41は38l/minで、目標基準値17,18,19,20を維持するために最低必要な貫流量よりも上に位置している。弁状態37は許容範囲45内にある。後続の呼吸サイクル40の経過において、後続の呼吸サイクルにおける時点T1において、貫流量は5l/minの第1のステップ幅をもって降下させられる。この第1のステップ幅42は、1l/min〜20l/minの範囲にある。後続の呼吸サイクル40の次の3つの呼吸サイクルのために、弁状態37は、降下にもかかわらず、所定の第1の閾値44の下で許容範囲45内に留まっている。呼吸サイクル40の経過の第5の呼吸サイクル中に、弁状態37は時点T2において、所定の第1の閾値44を上回り、許容不能範囲46に達する。貫流量はその後、第6の呼吸サイクル40において時点T3で、30l/min第2のステップ幅43をもって高められる。この第2のステップ幅43は、10l/min〜100l/minの範囲にある。弁状態37はいまや再び、所定の第1の閾値44の下の許容範囲内にある。呼吸サイクル40の第7の呼吸サイクルにおいて、時点T4で、貫流量は5l/minの第1のステップ幅をもって降下させられる。弁状態37は引き続き所定の第1の閾値44の下で許容範囲45内にある。この経過は時間的に連続してHF呼吸の制御のためにさらに続けられる。この例示された経過には、ガスの節減が見られる。第7の呼吸サイクル39,40の連続において、貫流値36は弁状態37に関するフィードバックに関して、約38l/minのスタート値から、少なくとも20l/minの上に範囲における平均値に降下されることができる。これによってこの例の場合、おおよそ30%〜50%のガスの節約が得られる。5l/minの第1のステップ幅42の選択及び30l/minの第2のステップ幅43の選択は、一例である。ステップ幅42,43の設定時に第2のステップ幅43を、この例におけるように第1のステップ幅42よりも大きく選択すると、弁負荷37は迅速に許容範囲45内に下げられる。
【0040】
図4に示されていない、ステップ幅適合の別の変化実施形態では、連続的な経過が続く間に第2のステップ幅43は、貫流量の次に必要な上昇時に25l/minに減じられる。これによって、許容範囲45内への弁負荷の接近が、貫流量の調量における変動を減じることと共に可能になる。第2のステップ幅43による貫流量の上昇によって、第1の閾値44の下における許容範囲45内への弁負荷37の減少が得られない場合には、直ぐに、第2のステップ幅43の減少は、次の経過において再び元に戻される。この場合第2のステップ幅43は、目標規準値21に記憶された値へと再び戻される。図4に時間的な経過が示されていない、ステップ幅適合のための別の変化実施形態は、第1の閾値44に対する間隔もしくは距離を元にして可能であり、例えば、許容不能範囲46における弁状況が第1の閾値44から離れれば離れるほど、第2のステップ幅43の幅を大きく選択することができる。このことは、人工呼吸器のバリエーションによって、例えば使用者によって行われる呼吸頻度の変化、I:E比の変化又は平均気道圧の変化によって惹起されるような負荷状況の極端な変化時に、許容範囲45内への迅速な戻りを可能にする。
【0041】
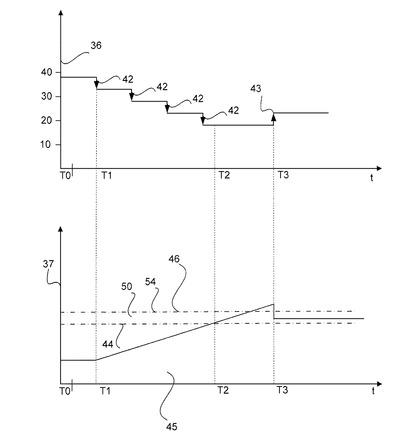
図5には、貫流値経過36と弁状態経過37の時間的な経過の第2の実施形態が示されている。HF呼吸は、時点T0において過剰の貫流量をもってスタートし、貫流スタート値41は、約38l/minで、目標基準値17,18,19,20(図1)を維持するのに最低限必要な貫流量の上に位置している。後続の時間経過において、所定の時間をおいて、弁状態が点検され、貫流量が合わせられる。この場合所定の時間は呼吸器制御と同期させられており、適合は各呼吸サイクルに同期して又は複数の呼吸サイクルに同期して行われる。弁負荷を調整するための実用に適した値は、呼吸頻度に比例的に合わせられて、1〜5の呼吸サイクルの範囲にある。時間的な経過は、時点T0で始まり、貫流量は、弁状態が所定の第1の閾値44を上回るまで、段階的に降下させられる。
【0042】
時点T1において貫流量は5l/minの第1のステップ幅で降下させられる。この第1のステップ幅42は、1l/min〜20l/minの範囲にある。弁状態37は、降下ステップがさらに3つ続くにもかかわらず、なお所定の第1の閾値44の下で許容範囲45内に留まっている。時点T2において弁状態37は、所定の第1の閾値44を上回って許容不能範囲46に達する。貫流量はその後ではもはや降下させられず、このレベルにおいて第1の閾値44の上における許容誤差領域50に、第2の閾値54が越えられるまで、保たれる。第2の閾値54を越えることは、方法の経過において、貫流量のさらなる降下によって直接的に生ぜしめられるのではなく、呼吸器のバリエーションによって、例えば使用者によって行われる呼吸頻度の変化、I:E比の変化又は平均気道圧の変化によって生じる。このような変化によって、第2の閾値54は越えられることがある。第2の閾値54が越えられて許容不能範囲46に達した後で、図示の例では、時点T3において貫流量は第2のステップ幅をもって高められる。弁状態は本発明のこの実施形態において許容誤差範囲50内に保たれることが望まれているので、第2のステップ幅43は、第1のステップ幅42と同様な形式で調節されると有利である。従って第2のステップ幅43は、1l/min〜20l/minの範囲にある。弁状態37は今や再び、所定の第2の閾値54の下における許容誤差範囲50内に位置する。貫流量の降下の経過は、第1の閾値44が下回られるや否や、時間的に連続してさらにHF呼吸を制御するために続けられる。
【符号の説明】
【0043】
1 人工呼吸器、 2 吸気弁、 3 呼気弁、 4 吸込みノズル、 5 パラメータ入力用の入力ユニット、 6 調節値入力装置、 7 人工呼吸器制御のための制御兼調整ユニット、 8 ガス混合ユニット、 9 ガス調量ユニット、 10 貫流調整装置、 11 貫流測定装置、 12 圧力調整装置、 13 圧力測定装置、 14 弁制御装置、 15 弁監視ユニット、弁調整ユニット、 16 パラメータセット、 17 第1の調節値、 18 第2の調節値、 19 第3の調節値、 20 第4の調節値、 21 目標規準値、 22 目標電流値、 23 実際電流値、 26 第1の温度センサ、 28 第2の温度センサ、 30 測定抵抗、 31 第1の電圧計、 32 巻線抵抗、 35 第2の電圧計、 36 貫流値経過、 37 弁状態経過、 38 呼吸経過、 39 第1の呼吸サイクル、 40 後続の呼吸サイクル、 41 貫流スタート値、 42 第1のステップ幅、 43 第2のステップ幅、 44 第1の閾値、 45 許容範囲、 46 許容不能範囲、 47 患者、 48 供給管、チューブ系、 49 第2の閾値、 50 許容誤差領域、 54 第2の閾値、 70 第1の調節部材、 80 第2の調節部材、 91 吸気用ガス接続部、 92 呼気用ガス接続部、 93 ガス流出部
【技術分野】
【0001】
本発明は、人工呼吸器を運転する方法に関する。
【背景技術】
【0002】
患者、特に新生児及び未熟児を機械的に呼吸させる場合、呼吸のためには、調整された交番振動で患者に呼吸空気を供給する人工呼吸形態(Beatmungsform)が使用される。呼吸圧に対して調整された交番振動によって、肺領域の改善された空気供給、ひいては、患者の血液循環系への改善された酸素/二酸化炭素・ガス交換が達成され、しかもこの場合呼吸圧のベースレベルが高められることはない。このような人工呼吸形態は高頻度人工呼吸と呼ばれ、以下においては単にHF呼吸と呼ぶ。成人の生理学的な呼吸は、典型的には毎分9〜18の呼吸数の範囲にあり、これによって0.15〜0.3Hzの呼吸頻度が生ぜしめられる。未熟児又は新生児は、毎分60〜120の呼吸数で呼吸し、これは1〜2Hzの呼吸頻度に相当する。高頻度呼吸の調整された頻度(以下においてはHF頻度と呼ぶ)は、毎秒5〜20振動の範囲にあり、つまり明らかに生理学的な呼吸頻度の上にある。HF呼吸は、HF人工呼吸器の出力部において連続的に、HF頻度に追従する圧力振幅の変動を生ぜしめ、この変動は、吸気と呼気とから成る生理学的な交番と、平均気道圧とに重畳される。HF呼吸の運転形式の制御及び調整のための入力パラメータとして、HF頻度、平均気道圧、HF振動の圧力振幅及び、吸気の時間と呼気の時間との比に相当するI:E比が、制御兼調整ユニットに供給される。
【0003】
頻度、圧力振幅、平均気道圧及びI:E比から成るこの入力パラメータは、使用者によって治療上の考え及び患者の体質によって導き出され、一方では、使用者によって操作ユニットにおける直接的な調節値として調節されることができ、他のバリエーションでは、調節値は他のパラメータから導き出されることができる。DE102006048680B3には、HF頻度とHF振動の圧力振幅とを調節された一回呼吸量から導き出すことができる方法が記載されている。WO2007142642A1には、人工呼吸器のための調整されたHF頻度のリズムで圧力変動を制御する方法が記載されている。HF呼吸を使用するための人工呼吸器は、DE3417954A1に記載されており、この場合患者用供給管にはHF頻度のリズムで弁装置と接続された発生器を用いて、正弦波状の正の交番圧力振幅が接続供給され、吸込みノズルを用いて呼気の能動的な吸出しによって、負の交番圧力振幅が生ぜしめられる。患者用供給管は人工呼吸器を患者と接続しており、患者の肺には圧力交番変動が、気管内挿入管又は呼吸マスクを用いてもたらされる。制御兼調整ユニットは、入力パラメータであるHF頻度、平均気道圧、圧力振幅及びI:E比を、圧力調整及び貫流調整のため及び例えば吸込みノズルや弁装置のような人工呼吸器構成部材の制御のために必要な調節値に、変換する。患者において空気圧交番変動を生ぜしめるために、空気容量は患者用供給管を通して患者に対して流入流出されねばならない。患者用供給管は、供給される空気量のための動的な空気抵抗であり、この空気抵抗は低域フィルタによって描くことができる。その結果、患者における圧力交番変動の供給に際しては、頻度の増大に連れて、そのために必要な流速度が過大に上昇することになる。患者の口におけるガス供給管における付加的な空気抵抗及び空気容量、並びにそれに基づく圧力降下を回避するために、HF呼吸では多くの場合、患者のそばに配置される貫流値検出用のセンサが省かれる。例えば種々様々な患者タイプや種々異なったチューブ系のために、例えば抵抗力及び適応性のような、空気に関するパラメータのバリエーションの多岐にわたる組合せ可能性を、HF呼吸によって適切に可能にするために、HF人工呼吸器は、過剰のガス容量とひいては過剰の流速度で運転され、これによって、意図されかつ調節された圧力交番振幅とHF頻度とを如何なる患者においても、保証することができる。このようなガス過剰の運転によって、調量されたガス量は呼吸調節のためよりも多くが必要になる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】DE102006048680B3
【特許文献2】WO2007142642A1
【特許文献3】DE3417954A1
【発明の概要】
【発明が解決しようとする課題】
【0005】
ゆえに本発明の課題は、必要に適合したガス量の調量を人工呼吸器のために可能にする方法を、提供することである。
【課題を解決するための手段】
【0006】
この課題を解決するために本発明の方法では、呼気弁を備えた、高頻度人工呼吸用の人工呼吸器を制御する方法において、貫流値を予め調節された貫流スタート値から段階的に第1のステップ幅で減少させ、呼気弁の負荷状況を検出し、この際に呼気弁の負荷状況が第1の閾値を超過することを監視し、呼気弁の負荷状況の第1の閾値の超過時に、貫流値のさらなる減少を停止し、呼気弁の負荷状況が第2の閾値を超過することを監視し、呼気弁の負荷状況の第2の閾値の超過時に、貫流値を第2のステップ幅で高めるようにした。
【0007】
また本発明の有利な態様では、呼気弁を備えた人工呼吸器を制御する方法において、貫流値を段階的に減少させ、呼気弁の負荷状況を検出し、この際に呼気弁の負荷状況を検出し、呼気弁の負荷状況を許容誤差範囲内に保つようにした。
【0008】
本発明の別の有利な方法は、請求項3以下の従属請求項に記載されている。
【発明の効果】
【0009】
HF呼吸を実施するために構成された人工呼吸器は、アクチュエータとセンサと制御エレメントとから成っている。このような人工呼吸器は、HF呼吸による呼吸のために特別に構成された人工呼吸器、いわゆるHF人工呼吸器であってよいが、しかしながらまた、成人の患者のための0.15〜0.3Hzの通常の呼吸頻度もしくは未熟児又は新生児のための1〜2Hzの通常の呼吸頻度の他に、それに加えて、毎秒5〜20の範囲における圧力交番呼吸を特殊なHF呼吸形態として備えるように、構成されている人工呼吸器であってもよい。HF呼吸のために必要な構成部材としては、ファン駆動装置として形成された、吸気弁又は空気源、呼気弁、吸込みノズル(エジェクタ)、パラメータ入力のための入力ユニット、並びに、運転形式及び運転形態を呼吸制御するための制御兼調整ユニットが挙げられる。さらに別の構成部材としては、ガス混合装置、ガス調量装置、貫流調整装置、貫流測定装置、圧力調整装置、圧力測定装置、弁制御装置、及び呼気弁の状態を監視する構成部材が挙げられる。この場合吸込みノズルは別個に運転及び制御されてもよいし、又は吸込みノズルの運転及び制御は、別個に運転及び制御されてもよいし、又は吸込みノズルの運転及び制御を、呼吸制御、HF呼吸の制御並びに圧力及び貫流量調整と組み合わせて行うこともできる。吸込みノズルの制御されない運転は、人工呼吸器の呼気分岐部において空気量を連続的に取り出す。この空気量は吸気として、人工呼吸器から新鮮ガス量として供給されねばならない。正の圧力交番振幅を有するHF呼吸の実施は、原則的には吸込みノズルなしでも可能であるが、しかしながら負の圧力交番振幅は、このような構成では対応不能である。入力ユニットを介して伝達される、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットは、患者の体質を考慮して使用者の治療上の考えから導き出され、HF呼吸を運転するための基準値を決定する。これらの基準値から、圧力のための目標基準値及び貫流量のための目標基準値を規定することができ、これらの目標基準値は、呼吸制御装置によって呼気弁に送られ、呼吸の予め調節された形態において実現される。吸気は、接続された吸気弁と吸気側のガス調量との関連において、接続された吸気弁として又はファン駆動装置として形成されて、正弦波状の正の交番圧力振幅が接続供給され、吸込みノズルを用いて、呼気の能動的な吸出しによって負の交番圧力振幅が生ぜしめられる。本発明による方法は、サイクル形式及び/又は連続形式で、予め調節された貫流値の降下を実施し、閉鎖された調整ループにおいて呼気弁の状態を制御回路におけるフィードバックとして使用する。
【0010】
弁及び弁装置の状態監視の可能性は、従来技術に基づいて公知であり、例えばDE10347886B3には調量弁及び遮断弁の監視について記載されている。DE10126821C1には、弁閉鎖速度の検出と制御技術的なフィードバックとを用いた、弁閉鎖手段を備えた弁の制御について記載されている。
【0011】
人工呼吸器のガス量を消費に合わせて調量する方法の第1実施形態では、制御兼調整ユニットにおけるHF呼吸のための基準値から、呼吸形態のための調節値、貫流量の調量、吸気弁及び呼気弁のための調節値が求められ、アクチュエータ及び構成部材へとさらに導かれ、そしてHF呼吸運転が行われる。これらの調節値は、ガス調量が、HF呼吸の調整される圧力振幅に関連してガス過剰を有するように、選択されている。第1のステップでは、ガス過剰を減じるために、第1の連続ループにおいて機械式の呼吸の各呼吸サイクルで、貫流量の段階的な降下が実施される。次のステップにおいて呼気弁の状態が検出される。第1実施形態において、第1の連続ループにおける貫流量の段階的な降下は、呼気弁の検出された状態が所定の第1の閾値を超過、つまり上回るまで、続けられる。この第1の閾値は、呼気弁がガス欠乏時に圧力交番振幅を生ぜしめるために過度に高い機械的な負荷を伴う運転状態において運転されることによって、生じる。呼気弁の閾値が超過されると、貫流量は第2のステップ幅をもって再び高められる。呼気弁の状態の検出は、本発明では連続的に行うことも又はサイクルの形で断続的に行うこともできる。
【0012】
貫流量の降下及び上昇は、互いに連続した2つの呼吸サイクルの間における交番時点において実施することができる。このような実施形態の他に、本発明では、貫流量の降下及び上昇を、目下の呼吸サイクル中に行うことも互いに連続した2つの呼吸サイクルの間に一緒に行うことも可能である。さらに本発明の別の実施形態では、貫流量の上昇又は降下を、貫流量の上昇又は降下のない所定の呼吸サイクル数の終了後に、行うことが可能であり、又は、貫流量の上昇又は降下を呼吸リズムとは非同期で行うような実施形態も可能である。呼気弁の負荷はこれによって再び減じられ、次いで再び所定の第1の閾値を下回る。次いで第1の連続ループは第1のステップへの移動と共に続けられる。第1の連続ループには第2の連続ループが重畳されており、この第2の連続ループにおいて、HF呼吸のための目標基準値及び使用者による目標基準値の変化が応答され、制御兼調整ユニットにさらに導かれる。
【0013】
本発明の第2実施形態では、第2のステップ幅は呼吸の経過において、呼気弁の所定の第1の閾値の超過毎に、次いで行われるこの第2のステップ幅による貫流量の上昇に伴って、減じられる。これによって、貫流量の大きな変動を甘受する必要なしに、弁状況は所定の第1の閾値に接近させられる。この場合第2のステップ幅は、第1のステップ幅の値によって与えられているような値にだけ減じられる。時間の経過において最適化された、貫流量と弁状況とを相互に適合させるための実地に即した値は、第2のステップ幅のためには、第1のステップ幅の50%〜150%の値で生ぜしめられる。第2のステップ幅の減少は、所定の第1の閾値の超過が繰り返された場合に、停止され、そしてさらなる経過において第1のステップ幅による貫流量の降下が所定の第1の閾値を超過しなくなるや否や、再び続けられる。
【0014】
所定の第1の閾値の超過時に貫流量を高める代わりに、本発明の第3実施形態では、貫流量はこの第1の閾値に保つことも可能である。貫流量の上昇は、所定の第2の閾値が超えられるやいなや、行われる。このようにすると、弁は第1の閾値と第2の閾値との間における帯域において運転される。
【0015】
第2及び第3の実施形態の特別な構成では、第1及び第2のステップ幅の変化が所定のスタート値から、呼吸の経過において、調整によって行われ、この場合には弁監視ユニットが、呼気弁の負荷状況を許容誤差帯域に保つ調整装置として構成される。閉鎖された制御回路において調整装置には、呼気弁の現在の負荷状況が実際値として供給され、負荷状況の限界値が目標値として供給される。調整装置はその出力部において第1及び/又は第2のステップ幅のための値を、その調整強さ及び調整特性に相応して与え、これによって貫流量は連続的に閉鎖された制御回路において増減され、呼気弁の負荷状況は、基準値の範囲内に保たれる。調整装置はこの場合有利には、比例動作と積分動作を組み合わせた制御特性を備えたPI制御装置として構成されており、これによって調整偏差を最小にすること及び、負荷状況を、第3実施形態においては、第1の閾値と第2の閾値との間における帯域に保つこと、もしくは第2実施形態においては、呼気弁の負荷状況を僅かな変動をもって第1の閾値の下に保つことが可能である。
【0016】
本発明の第4実施形態では、呼気弁の目標調節値は、呼気弁の状態を求めるために呼気弁の状態のための入力値として使用される。この目標調節値は、呼気弁の通電のための目標電流値として、頻度、圧力振幅、平均気道圧及びI:E比のための目標基準値から圧力測定装置及び圧力調整装置を介して直に生ぜしめられ、制御兼調整ユニットにおいて使用される。圧力調整装置は、圧力目標値を、圧力目標値と相関関係にある閉鎖力の弁固有値と、閉鎖力のために必要な磁界強さとに変換する。目標電流値は制御兼調整ユニットにおいて、最大励磁電流、最大投入接続長さ及び最大弁温度のような、呼気弁の確実な運転のための境界条件を考慮して分析される。目標電流値が所定の目標電流閾値を上回ると、このことは呼気弁の第1の所定の閾値の超過として評価され、その結果貫流量は本発明によれば連続した第1のループにおいて高められる。
【0017】
第5実施形態では、実際電流値が呼気弁を励磁するために測定されて検出され、呼気弁の状態のための入力値として使用され、これによって貫流量の降下後における呼気弁の更新された状態を検出することができる。
【0018】
第6実施形態では、運転中における呼気弁の巻線抵抗が測定されて検出され、呼気弁の状態のための状態値として使用され、これによって呼気弁の状態を検出することができる。巻線抵抗値は、巻線材料の温度依存に関する、無通電状態のコイルにおける基準抵抗との比較において、呼気弁の加熱のための値である。
【0019】
第7実施形態では、呼気弁の励磁コイルの相互誘導電圧が測定されて検出され、呼気弁の状態のための入力値として使用され、これによって呼気弁の状態を検出することができる。
【0020】
第8実施形態では、生じている弁温度が、1つのモデルを介して、つまり弁構造形式と励磁電流との関係を利用して、呼気弁の確実な運転のための境界条件を最大確実な運転温度との比較において考慮する、モデルを介して表示される。
【0021】
第9実施形態では、弁温度が温度センサによって検出され、呼気弁の確実な運転のための境界条件の考慮下で一緒に考慮される。また第10実施形態では、周囲温度が呼気弁の状態判断のために一緒に利用される。
【0022】
上に述べた10の実施形態は、一方では、弁状態監視によってガス量を減じるための独立した本発明の解決策である。またこれら10の実施形態を互いに組み合わせることも可能であり、これによって、呼気弁の監視品質もしくは監視精度をさらに改善することができる。
【0023】
本発明のさらに別の実施形態では、貫流スタート値が、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから、又はこのパラメータセットの変化から導き出される。例えばこの別の実施形態の変化実施形態では、一次関数の対応関係を使用して、5Hzの呼吸頻度において30l/minが生じ、10Hzの呼吸頻度において60l/minが生じ、20Hzの呼吸頻度において120l/minが生じる。
【0024】
本発明のさらに別の実施形態では、貫流量の降下の第1のステップ幅が、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから、又はこのパラメータセットの変化から導き出される。例えば第1のステップ幅は、この別の実施形態の変化実施形態では、貫流量の現在値又は平均値からパーセンテージで導き出すことができる。パーセンテージによって導き出すための実地に即した値は、例えば貫流量の10%の値である。極めて小さなステップ幅を回避するために、10%の値は、例えば1l/minの固定の最小ステップ幅と結び合わされることができる。
【0025】
本発明の別の実施形態では、貫流量の上昇の第2のステップ幅が、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから導き出される。例えば第2のステップ幅は、この別の実施形態の有利な変化実施形態では、貫流量の現在値又は平均値からパーセンテージで導き出すことができる。パーセンテージによって導き出すための実地に即した値は、例えば貫流量の10%の値である。極めて小さなステップ幅を回避するために、10%の値は、例えば1l/minの固定の最小ステップ幅と結び合わされることができる。
【0026】
別の有利な実施形態では、貫流量の上昇の第2のステップ幅は、弁の負荷状態と所定の第1の閾値との間における現在の間隔もしくは距離から導き出すことができる。
【0027】
別の実施形態では、貫流量の上昇の第1のステップ幅は、弁の負荷状態と所定の閾値との間における現在の間隔もしくは距離から導き出すことができる。
【0028】
本発明のこの別の実施形態の有利な変化実施形態では、貫流量の上昇の第2のステップ幅は、第1のステップ幅から及び/又は第2のステップ幅のそれまでの経過から導き出されて、一連の呼吸サイクルにおいて適合される。
【図面の簡単な説明】
【0029】
【図1】HF呼吸のための人工呼吸器の構成を概略的に示す図である。
【図2】呼気弁監視装置の第1実施形態を示す図である。
【図3】呼気弁監視装置の第2実施形態を示す図である。
【図4】弁状態に関連した貫流量の適合の時間的な経過を示す第1実施形態を示す線図である。
【図5】弁状態に関連した貫流量の適合の時間的な経過を示す第2実施形態を示す線図である。
【発明を実施するための形態】
【0030】
次に図面を参照しながら本発明の実施の形態を説明する。
【0031】
図1には、人工呼吸器の構成部材が概略的に示されており、この人工呼吸器は、HF呼吸を実施するために構成されている。人工呼吸器1は複数の構成部材、すなわち吸気弁2、呼気弁3、吸込みノズル4、入力ユニット5、制御兼調整ユニット7、ガス混合ユニット8、ガス調量ユニット9、貫流調整装置10、貫流測定装置11、圧力調整装置12、圧力測定装置13、弁制御装置14、弁監視ユニット15、吸気用ガス接続部91、呼気用ガス接続部92及びガス流出部93から成っている。さらに調節値入力装置6が設けられており、この調節値入力装置6を用いて、高頻度呼吸(Hochfrequenzbeatmung)のために重要な調節値17,18,19,20が1つのパラメータセット16として、制御兼調整ユニット7内における圧力調整装置12及び貫流調整装置10に達する。パラメータ入力のための入力ユニット5は、ユーザインターフェースと組み合わされて形成されており、4つの調節値17,18,19,20のための調節値入力装置6を形成している。4つの調節値17,18,19,20は、第1の調節値17として高頻度呼吸のための頻度の目標値(fHF-ventilation)、第2の目標値18として圧力振幅(Pamplitude)、第3の調節値19として平均気道圧(MAP)、第4の調節値20としてI:E比(Ratio I:E)である。これらの調節値、頻度17、圧力振幅18、平均気道圧19及びI:E比20は、HF呼吸の開始及び実施のための目標規準値21として働く。貫流調整装置10、圧力調整装置12及び調節値入力装置6は、制御兼調整ユニット7の直ぐ近くに接続されている。制御兼調整ユニット7は制御命令を弁制御装置14に伝達し、入力ユニット5から目標規準値21を得る。弁監視ユニット15は、弁制御装置14の1構成部分として構成されていて、貫流量上昇又は貫流量減少を調節する。貫流量の調節はこの場合、本発明では一方では所定のステップ幅によって行うことができ、他方では呼気弁3の負荷状況が閉鎖された制御回路(閉ループ)に含まれているような構成では、可変のステップ幅によって行うことができる。弁監視ユニット15はこのような構成では、コントローラを備えた弁調整ユニットとして構成されている。患者47は吸気側のガス接続部91と呼気側のガス接続部92とを介して、供給管48を用いて、図示の実施例ではチューブ系を用いて、HF人工呼吸器1と接続されている。呼気は吸込みノズル4を介して供給管48から吸い出され、ガス流出部93を介して周囲に排出される。
【0032】
図2には、図1に示された弁制御装置14及び呼気用の弁監視ユニット15の第1実施形態が示されている。図2において、図1におけると同じ構成部材には同一符号が使用されている。この第1実施形態では、制御兼調整ユニット7において、呼気弁3の第1の調節部材70の入力部における調節値、つまり目標電流値(Iex-V_soll)22が、呼気弁3の現在状態及び負荷状況のための入力値として使用される。
【0033】
図3には、図1に示された弁制御装置14及び呼気用の弁監視ユニット15の第2実施形態が示されている。図3において、図1におけると同じ構成部材には同一符号が使用されている。この第2実施形態では、制御兼調整ユニット7から呼気弁3を制御するために第2の調節部材80の入力部に、目標電流値(Iex-V_soll)22が供給される。弁の巻線を通って流れる弁電流(Iex-V_ist)23が測定され、制御兼調整ユニット7に送られる。弁電流(Iex-V_ist)23は測定抵抗30において第1の測定電圧31として、弁制御装置14における電圧計を用いて検出され、制御兼調整ユニット7に送られる。
【0034】
第1の変化実施形態では、現在の電圧(Vex-V)33は、第2の電圧計35を用いて呼気弁3のコイルにおいて検出され、弁制御装置14に送られる。
【0035】
現在の電圧(Vex-V)33が呼気弁3のスイッチオン時に検出される場合には、この現在の電圧(Vex-V)33は、弁3の相互誘導電圧の1つの尺度である。第4実施形態では、呼気弁3の相互誘導電圧34は、呼気弁3の現在状態及び負荷状況のための入力値として使用され、制御兼調整ユニット7に送られる。
【0036】
第2の変化実施形態では、弁制御装置14において巻線抵抗(Rex-V)32を算出するために、現在の電圧(Vex-V)33と弁電流(Iex-V_ist)23とから成る組合せが使用される。巻線抵抗(Rex-V)32は、巻線材料の温度により変化する抵抗に関して、呼気弁3のコイルの加熱のための直接的な値であり、巻線抵抗32の所定の基準値との比較において呼気弁3の負荷状況を再現する。
【0037】
呼気弁3の巻線抵抗32は、呼気弁3の現在の状態と負荷状況とのための入力値として使用され、制御兼調整ユニット7に伝達される。
【0038】
さらに図3には第1の温度センサ26が呼気弁3の温度を監視するために配置されており、この第1の温度センサ26は単独で又は第2の温度センサ28との関連において、呼気弁3の状態監視のために利用されることができる。
【0039】
図4には、呼吸サイクル38の経過における、貫流調節値36と弁状態経過37との時間的な経過の一例が示されている。第1の呼吸サイクル39において、HF呼吸は時点TOにおいて過剰の貫流量をもってスタートし、貫流スタート値41は38l/minで、目標基準値17,18,19,20を維持するために最低必要な貫流量よりも上に位置している。弁状態37は許容範囲45内にある。後続の呼吸サイクル40の経過において、後続の呼吸サイクルにおける時点T1において、貫流量は5l/minの第1のステップ幅をもって降下させられる。この第1のステップ幅42は、1l/min〜20l/minの範囲にある。後続の呼吸サイクル40の次の3つの呼吸サイクルのために、弁状態37は、降下にもかかわらず、所定の第1の閾値44の下で許容範囲45内に留まっている。呼吸サイクル40の経過の第5の呼吸サイクル中に、弁状態37は時点T2において、所定の第1の閾値44を上回り、許容不能範囲46に達する。貫流量はその後、第6の呼吸サイクル40において時点T3で、30l/min第2のステップ幅43をもって高められる。この第2のステップ幅43は、10l/min〜100l/minの範囲にある。弁状態37はいまや再び、所定の第1の閾値44の下の許容範囲内にある。呼吸サイクル40の第7の呼吸サイクルにおいて、時点T4で、貫流量は5l/minの第1のステップ幅をもって降下させられる。弁状態37は引き続き所定の第1の閾値44の下で許容範囲45内にある。この経過は時間的に連続してHF呼吸の制御のためにさらに続けられる。この例示された経過には、ガスの節減が見られる。第7の呼吸サイクル39,40の連続において、貫流値36は弁状態37に関するフィードバックに関して、約38l/minのスタート値から、少なくとも20l/minの上に範囲における平均値に降下されることができる。これによってこの例の場合、おおよそ30%〜50%のガスの節約が得られる。5l/minの第1のステップ幅42の選択及び30l/minの第2のステップ幅43の選択は、一例である。ステップ幅42,43の設定時に第2のステップ幅43を、この例におけるように第1のステップ幅42よりも大きく選択すると、弁負荷37は迅速に許容範囲45内に下げられる。
【0040】
図4に示されていない、ステップ幅適合の別の変化実施形態では、連続的な経過が続く間に第2のステップ幅43は、貫流量の次に必要な上昇時に25l/minに減じられる。これによって、許容範囲45内への弁負荷の接近が、貫流量の調量における変動を減じることと共に可能になる。第2のステップ幅43による貫流量の上昇によって、第1の閾値44の下における許容範囲45内への弁負荷37の減少が得られない場合には、直ぐに、第2のステップ幅43の減少は、次の経過において再び元に戻される。この場合第2のステップ幅43は、目標規準値21に記憶された値へと再び戻される。図4に時間的な経過が示されていない、ステップ幅適合のための別の変化実施形態は、第1の閾値44に対する間隔もしくは距離を元にして可能であり、例えば、許容不能範囲46における弁状況が第1の閾値44から離れれば離れるほど、第2のステップ幅43の幅を大きく選択することができる。このことは、人工呼吸器のバリエーションによって、例えば使用者によって行われる呼吸頻度の変化、I:E比の変化又は平均気道圧の変化によって惹起されるような負荷状況の極端な変化時に、許容範囲45内への迅速な戻りを可能にする。
【0041】
図5には、貫流値経過36と弁状態経過37の時間的な経過の第2の実施形態が示されている。HF呼吸は、時点T0において過剰の貫流量をもってスタートし、貫流スタート値41は、約38l/minで、目標基準値17,18,19,20(図1)を維持するのに最低限必要な貫流量の上に位置している。後続の時間経過において、所定の時間をおいて、弁状態が点検され、貫流量が合わせられる。この場合所定の時間は呼吸器制御と同期させられており、適合は各呼吸サイクルに同期して又は複数の呼吸サイクルに同期して行われる。弁負荷を調整するための実用に適した値は、呼吸頻度に比例的に合わせられて、1〜5の呼吸サイクルの範囲にある。時間的な経過は、時点T0で始まり、貫流量は、弁状態が所定の第1の閾値44を上回るまで、段階的に降下させられる。
【0042】
時点T1において貫流量は5l/minの第1のステップ幅で降下させられる。この第1のステップ幅42は、1l/min〜20l/minの範囲にある。弁状態37は、降下ステップがさらに3つ続くにもかかわらず、なお所定の第1の閾値44の下で許容範囲45内に留まっている。時点T2において弁状態37は、所定の第1の閾値44を上回って許容不能範囲46に達する。貫流量はその後ではもはや降下させられず、このレベルにおいて第1の閾値44の上における許容誤差領域50に、第2の閾値54が越えられるまで、保たれる。第2の閾値54を越えることは、方法の経過において、貫流量のさらなる降下によって直接的に生ぜしめられるのではなく、呼吸器のバリエーションによって、例えば使用者によって行われる呼吸頻度の変化、I:E比の変化又は平均気道圧の変化によって生じる。このような変化によって、第2の閾値54は越えられることがある。第2の閾値54が越えられて許容不能範囲46に達した後で、図示の例では、時点T3において貫流量は第2のステップ幅をもって高められる。弁状態は本発明のこの実施形態において許容誤差範囲50内に保たれることが望まれているので、第2のステップ幅43は、第1のステップ幅42と同様な形式で調節されると有利である。従って第2のステップ幅43は、1l/min〜20l/minの範囲にある。弁状態37は今や再び、所定の第2の閾値54の下における許容誤差範囲50内に位置する。貫流量の降下の経過は、第1の閾値44が下回られるや否や、時間的に連続してさらにHF呼吸を制御するために続けられる。
【符号の説明】
【0043】
1 人工呼吸器、 2 吸気弁、 3 呼気弁、 4 吸込みノズル、 5 パラメータ入力用の入力ユニット、 6 調節値入力装置、 7 人工呼吸器制御のための制御兼調整ユニット、 8 ガス混合ユニット、 9 ガス調量ユニット、 10 貫流調整装置、 11 貫流測定装置、 12 圧力調整装置、 13 圧力測定装置、 14 弁制御装置、 15 弁監視ユニット、弁調整ユニット、 16 パラメータセット、 17 第1の調節値、 18 第2の調節値、 19 第3の調節値、 20 第4の調節値、 21 目標規準値、 22 目標電流値、 23 実際電流値、 26 第1の温度センサ、 28 第2の温度センサ、 30 測定抵抗、 31 第1の電圧計、 32 巻線抵抗、 35 第2の電圧計、 36 貫流値経過、 37 弁状態経過、 38 呼吸経過、 39 第1の呼吸サイクル、 40 後続の呼吸サイクル、 41 貫流スタート値、 42 第1のステップ幅、 43 第2のステップ幅、 44 第1の閾値、 45 許容範囲、 46 許容不能範囲、 47 患者、 48 供給管、チューブ系、 49 第2の閾値、 50 許容誤差領域、 54 第2の閾値、 70 第1の調節部材、 80 第2の調節部材、 91 吸気用ガス接続部、 92 呼気用ガス接続部、 93 ガス流出部
【特許請求の範囲】
【請求項1】
呼気弁(3)を備えた、高頻度人工呼吸用の人工呼吸器(1)を制御する方法であって、
貫流値(36)を予め調節された貫流スタート値(41)から段階的に第1のステップ幅(42)で減少させ、
呼気弁(3)の負荷状況(37)を検出し、
この際に呼気弁(3)の負荷状況(3)が第1の閾値(44)を超過することを監視し、
呼気弁(3)の負荷状況(37)の第1の閾値(44)の超過時に、貫流値(36)のさらなる減少を停止し、
呼気弁(3)の負荷状況(37)が第2の閾値(54)を超過することを監視し、
呼気弁(3)の負荷状況(37)の第2の閾値(54)の超過時に、貫流値(36)を第2のステップ幅(43)で高めることを特徴とする、人工呼吸器を制御する方法。
【請求項2】
呼気弁(3)を備えた人工呼吸器(1)を制御する方法であって、
貫流値(36)を段階的に減少させ、
呼気弁(3)の負荷状況(37)を検出し、
この際に呼気弁(3)の負荷状況(37)を検出し、
呼気弁(3)の負荷状況(37)を許容誤差範囲(50)内に保つ、請求項1記載の方法。
【請求項3】
呼気弁(3)の負荷状況(37)の監視と貫流量の減少とを、1つの呼吸サイクル(39)からそれぞれ直ぐ次の呼吸サイクルへの連続的な一連の呼吸サイクル(39,40)に同期させて、又はさらに続く後続の呼吸サイクル(40)に同期させて行う、請求項1又は2記載の方法。
【請求項4】
呼気弁(3)の負荷状況(37)の監視と貫流量の上昇とを、1つの呼吸サイクル(39)からそれぞれ直ぐ次の呼吸サイクルへの連続的な一連の呼吸サイクル(39,40)に同期させて、又はさらに続く後続の呼吸サイクル(40)に同期させて行う、請求項1又は2記載の方法。
【請求項5】
呼気弁(3)の負荷状況(37)の監視と貫流量の減少とを、一連の呼吸サイクル(39,40)に対して非同期的に行う、請求項1又は2記載の方法。
【請求項6】
呼気弁(3)の負荷状況(37)の監視と貫流量の上昇とを、一連の呼吸サイクル(39,40)に対して非同期的に行う、請求項1又は2記載の方法。
【請求項7】
負の圧力交番振幅を吸込みノズル(4)を用いてもたらす、請求項1又は2記載の方法。
【請求項8】
負荷状況(37)を呼気弁(3)の目標調節値から導き出す、請求項1又は2記載の方法。
【請求項9】
呼気弁(3)の目標調節値を目標電流値(22)として形成する、請求項8記載の方法。
【請求項10】
負荷状況(37)を呼気弁(3)の制御電流の実際値(21)から導き出す、請求項1又は2記載の方法。
【請求項11】
負荷状況(37)を、呼気弁(3)のコイルの無通電時における基準抵抗値に対する、呼気弁(3)の通電されたコイルの抵抗変化から導き出す、請求項1又は2記載の方法。
【請求項12】
負荷状況(37)を、呼気弁(3)の相互誘導電圧(34)から導き出す、請求項1又は2記載の方法。
【請求項13】
負荷状況(37)を、基準温度ポイント(29)に対する呼気弁(3)の温度値(27)から導き出す、請求項1又は2記載の方法。
【請求項14】
貫流スタート値(41)を、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから導き出す、請求項1又は2記載の方法。
【請求項15】
第1のステップ幅(42)を、頻度(17)、圧力振幅(18)、平均気道圧(19)及びI:E比(20)から成るパラメータから導き出す、請求項1又は2記載の方法。
【請求項16】
第2のステップ幅(43)を、頻度(17)、圧力振幅(18)、平均気道圧(19)及びI:E比(20)から成るパラメータから導き出す、請求項1又は2記載の方法。
【請求項17】
第2のステップ幅(43)を第1のステップ幅(42)から導き出す、請求項1又は2記載の方法。
【請求項18】
第2のステップ幅(43)を、呼気弁(3)の負荷状況(37)と第1の閾値(44)との間の間隔から導き出す、請求項1又は2記載の方法。
【請求項19】
第1のステップ幅(42)及び/又は第2のステップ幅(43)を、呼気弁(3)の負荷状況(37)と、第1の閾値(44)及び/又は第2の閾値(54)とから導き出し、かつ変化させる、請求項1又は2記載の方法。
【請求項20】
第1のステップ幅(42)及び/又は第2のステップ幅(43)の導出及び変化を継続的に行い、呼気弁(3)の負荷状況(37)を第1の閾値(44)及び/又は第2の閾値(54)に関連して調整する、請求項19記載の方法。
【請求項21】
第1のステップ幅(42)及び/又は第2のステップ幅(43)の導出及び変化を継続的に行い、呼気弁(3)の負荷状況(37)を許容誤差範囲(50)に調整する、請求項19記載の方法。
【請求項1】
呼気弁(3)を備えた、高頻度人工呼吸用の人工呼吸器(1)を制御する方法であって、
貫流値(36)を予め調節された貫流スタート値(41)から段階的に第1のステップ幅(42)で減少させ、
呼気弁(3)の負荷状況(37)を検出し、
この際に呼気弁(3)の負荷状況(3)が第1の閾値(44)を超過することを監視し、
呼気弁(3)の負荷状況(37)の第1の閾値(44)の超過時に、貫流値(36)のさらなる減少を停止し、
呼気弁(3)の負荷状況(37)が第2の閾値(54)を超過することを監視し、
呼気弁(3)の負荷状況(37)の第2の閾値(54)の超過時に、貫流値(36)を第2のステップ幅(43)で高めることを特徴とする、人工呼吸器を制御する方法。
【請求項2】
呼気弁(3)を備えた人工呼吸器(1)を制御する方法であって、
貫流値(36)を段階的に減少させ、
呼気弁(3)の負荷状況(37)を検出し、
この際に呼気弁(3)の負荷状況(37)を検出し、
呼気弁(3)の負荷状況(37)を許容誤差範囲(50)内に保つ、請求項1記載の方法。
【請求項3】
呼気弁(3)の負荷状況(37)の監視と貫流量の減少とを、1つの呼吸サイクル(39)からそれぞれ直ぐ次の呼吸サイクルへの連続的な一連の呼吸サイクル(39,40)に同期させて、又はさらに続く後続の呼吸サイクル(40)に同期させて行う、請求項1又は2記載の方法。
【請求項4】
呼気弁(3)の負荷状況(37)の監視と貫流量の上昇とを、1つの呼吸サイクル(39)からそれぞれ直ぐ次の呼吸サイクルへの連続的な一連の呼吸サイクル(39,40)に同期させて、又はさらに続く後続の呼吸サイクル(40)に同期させて行う、請求項1又は2記載の方法。
【請求項5】
呼気弁(3)の負荷状況(37)の監視と貫流量の減少とを、一連の呼吸サイクル(39,40)に対して非同期的に行う、請求項1又は2記載の方法。
【請求項6】
呼気弁(3)の負荷状況(37)の監視と貫流量の上昇とを、一連の呼吸サイクル(39,40)に対して非同期的に行う、請求項1又は2記載の方法。
【請求項7】
負の圧力交番振幅を吸込みノズル(4)を用いてもたらす、請求項1又は2記載の方法。
【請求項8】
負荷状況(37)を呼気弁(3)の目標調節値から導き出す、請求項1又は2記載の方法。
【請求項9】
呼気弁(3)の目標調節値を目標電流値(22)として形成する、請求項8記載の方法。
【請求項10】
負荷状況(37)を呼気弁(3)の制御電流の実際値(21)から導き出す、請求項1又は2記載の方法。
【請求項11】
負荷状況(37)を、呼気弁(3)のコイルの無通電時における基準抵抗値に対する、呼気弁(3)の通電されたコイルの抵抗変化から導き出す、請求項1又は2記載の方法。
【請求項12】
負荷状況(37)を、呼気弁(3)の相互誘導電圧(34)から導き出す、請求項1又は2記載の方法。
【請求項13】
負荷状況(37)を、基準温度ポイント(29)に対する呼気弁(3)の温度値(27)から導き出す、請求項1又は2記載の方法。
【請求項14】
貫流スタート値(41)を、頻度、圧力振幅、平均気道圧及びI:E比から成るパラメータセットから導き出す、請求項1又は2記載の方法。
【請求項15】
第1のステップ幅(42)を、頻度(17)、圧力振幅(18)、平均気道圧(19)及びI:E比(20)から成るパラメータから導き出す、請求項1又は2記載の方法。
【請求項16】
第2のステップ幅(43)を、頻度(17)、圧力振幅(18)、平均気道圧(19)及びI:E比(20)から成るパラメータから導き出す、請求項1又は2記載の方法。
【請求項17】
第2のステップ幅(43)を第1のステップ幅(42)から導き出す、請求項1又は2記載の方法。
【請求項18】
第2のステップ幅(43)を、呼気弁(3)の負荷状況(37)と第1の閾値(44)との間の間隔から導き出す、請求項1又は2記載の方法。
【請求項19】
第1のステップ幅(42)及び/又は第2のステップ幅(43)を、呼気弁(3)の負荷状況(37)と、第1の閾値(44)及び/又は第2の閾値(54)とから導き出し、かつ変化させる、請求項1又は2記載の方法。
【請求項20】
第1のステップ幅(42)及び/又は第2のステップ幅(43)の導出及び変化を継続的に行い、呼気弁(3)の負荷状況(37)を第1の閾値(44)及び/又は第2の閾値(54)に関連して調整する、請求項19記載の方法。
【請求項21】
第1のステップ幅(42)及び/又は第2のステップ幅(43)の導出及び変化を継続的に行い、呼気弁(3)の負荷状況(37)を許容誤差範囲(50)に調整する、請求項19記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−205925(P2012−205925A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2012−158027(P2012−158027)
【出願日】平成24年7月13日(2012.7.13)
【分割の表示】特願2010−50113(P2010−50113)の分割
【原出願日】平成22年3月8日(2010.3.8)
【出願人】(503311461)ドレーガー メディカル ゲゼルシャフト ミット ベシュレンクテル ハフツング (5)
【氏名又は名称原語表記】Draeger Medical GmbH
【住所又は居所原語表記】Moislinger Allee 53−55,D−23558 Luebeck,Germany
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成24年7月13日(2012.7.13)
【分割の表示】特願2010−50113(P2010−50113)の分割
【原出願日】平成22年3月8日(2010.3.8)
【出願人】(503311461)ドレーガー メディカル ゲゼルシャフト ミット ベシュレンクテル ハフツング (5)
【氏名又は名称原語表記】Draeger Medical GmbH
【住所又は居所原語表記】Moislinger Allee 53−55,D−23558 Luebeck,Germany
【Fターム(参考)】
[ Back to top ]