
人工呼吸器用チューブシステム
本発明は、侵襲性呼吸に適した人工呼吸器(13)のための3アーム型チューブシステム(11)に関する。この種の人工呼吸器は、能動的吸気弁と能動的呼気弁(29)とを有する。チューブシステム(11)は、吸気チューブアーム(17)と、呼気チューブアーム(27)と、マスク(57)に接続させるための呼吸チューブアーム(37)と、流量センサ(23)とを有している。本発明によれば、前記呼吸チューブアーム(37)に所定の漏出部(39)が形成され、前記流量センサ(23)は前記漏出部(39)と前記マスク(57)との間に配置されている。本発明は、さらに、このようなチューブシステムを備えた人工呼吸器及び人工呼吸器の作動方法にも関わる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人工呼吸器用チューブシステム、この種のチューブシステムを備えた人工呼吸器、人工呼吸器の作動方法、患者を機械的に人工呼吸させるための方法に関するものである。
【背景技術】
【0002】
侵襲性呼吸に対してはツインチューブシステムが使用される。ツインチューブシステムは、Yピースを介して患者マスクに接続されている吸気チューブと呼気チューブとを有している。吸気チューブは人工呼吸器を汚染から保護する吸気フィルタに接続されている。場合によっては、呼吸器側の吸気チューブ片と患者側の吸気チューブ片との間に加湿器が配置される。また、Yピース患者側に、流量センサと、中間チューブを介してカニューレとが配置される場合がある。
【0003】
Yピースに接続している呼気チューブは呼吸空気を人工呼吸器へ戻し、場合によっては除水器を備えている。人口呼吸器は吸気弁と呼気弁とを有し、両弁とも能動制御される。吸息のために呼気弁が閉じられ、かつ吸気弁が開かれて、過圧が肺とチューブ内部に得られる。呼息の場合には呼気弁が開かれ、吸気弁が閉じられて、可能な限り抵抗のない呼息を保障する。吸気弁と呼気弁とが能動制御されるため、呼気終末圧力を配量することもできる。
【0004】
ツインチューブシステムにおいて実際の呼吸体積を検出して患者の自己活動を確認することができるようにするため、本出願人はYピースとマスクとの間に流量センサを接続することを提案した(特許文献1を参照)。
【0005】
非侵襲性機械呼吸に対してはシングルチューブシステム(single limb breathing systems)が使用される。シングルチューブシステムの特徴は、人工呼吸器を汚染から保護する吸気フィルタに接続して人工呼吸器と患者との間の距離を橋絡するただ1つの呼吸チューブと、マスクとを特徴としている。閉鎖型と開放型のシングルチューブシステムがある。閉鎖型シングルチューブシステムは能動的な呼気弁を有し、該呼気弁はほとんどの場合空気圧チューブを介して人工呼吸器により制御される。呼気弁は患者側で呼吸チューブ内に着座している。本システムには圧力測定チューブを設けることが多く、該圧力測定チューブを介して呼吸空気又は呼息空気を呼気弁において測定することができ、患者の有効通気量を算出することができるようになっている。呼気弁が患者の顔の直前に配置されないようにするため、呼気弁とマスクとの間に中間チューブが配置されることもある。患者は人工呼吸器から呼吸チューブを通じて呼吸する。患者が吸息する場合、呼気弁は、チューブ内にある過圧がマスクと患者の肺とへ到達する吸気位置にある。マスク内に呼吸空気の所望の過圧を発生させるための呼気穴は閉じている。呼息の場合には、呼気弁は、チューブとマスクとの接続が遮断され、しかし呼気空気ができるだけ小さな抵抗で呼気穴を通じて逃がすことができるような呼気位置にある。このようなシングルチューブシステムは実質的にツインチューブシステムと同等である。実質的にツインシングルチューブシステムと異なるのは、呼気弁が患者に近い位置に配置されており、それ故人工呼吸器から離れている点だけである。
【0006】
このようなシングルチューブシステムの欠点は、マスクにかかる重量と患者側の呼気弁の存在が患者にとって邪魔になることである。
【0007】
このような欠点を解消するため、能動的な呼気弁を省略した開放型シングルチューブシステムもある。このような開放型システムの呼吸チューブは所定の漏出部を有している。この漏出部は呼吸チューブに設けた穴によって定義され、穴は選定された横断面を有している。この漏出部はチューブの患者側端部に形成されている。前記穴を通じて呼息空気が逃げる。この穴を通じて新鮮な呼吸空気の一部も逃げる。したがってこの種のシングルチューブシステムでは、患者が必要とする呼吸空気よりも多くの呼吸空気を調製してチューブを通じ搬送しなければならない。必要量の呼吸空気を算出することができるように、前記漏出部ではチューブ内の圧力が測定され、或いは、製造者が検出したチューブシステムを特徴付ける特性データに基づいてコンピュータで近似させる。この開放型シングルチューブシステムは、患者がただ1つのチューブとマスクのみを担持するだけなので、患者にとって快適である。患者は人工呼吸器の圧力に抗していつでも呼息することができ、人口呼吸器が呼吸空気を提供しない場合でもいつでも吸息することができる。
【0008】
開放型シングルチューブシステムの場合、呼息時に呼吸チューブ内の圧力が人工呼吸器により短時間排出される。これにより患者の抵抗のない呼息が可能になる。この場合、消費された呼息空気は呼吸チューブ内へ流れる。呼息時間終了直前に呼吸チューブ内の呼吸圧が再び生成される。これにより、次の吸息までの呼吸段階の間に、チューブ内にある呼気空気が漏出部から押し出されてチューブが洗浄される。
【0009】
それ故、侵襲性呼吸から非侵襲性呼吸へ交替させる場合は、通常、ツインチューブシステムから開放型シングルチューブシステムに置換して、患者を重いツインチューブシステムから解放させる。しかしながら、侵襲性呼吸用の人口呼吸器は、チューブ内や肺の呼吸圧をコントロールできるように呼気チューブを呼気弁に接続するよう指定されているので、従来はチューブシステムと一緒に人工呼吸器をも交換する必要があった。
【0010】
【特許文献1】米国特許第4083245号明細書
【発明の開示】
【発明が解決しようとする課題】
【0011】
したがって、本発明の課題は、侵襲性呼吸用に能動的吸気弁と能動的呼気弁とを備えた人工呼吸器において、患者にとって快適な軽量なチューブシステム、特にシングルチューブシステムの市販のチューブでもって非侵襲性呼吸に使用できるようにすることである。
【課題を解決するための手段】
【0012】
この課題は請求項1の構成によって解決される。
【0013】
これによれば、能動的吸気弁と能動的呼気弁とを有する侵襲性呼吸に適した人工呼吸器のための3アーム型の、すなわちY字状に形成されたチューブシステムが、人工呼吸器の吸気弁に接続するための吸気チューブアームと、人工呼吸器の呼気弁に接続させるための呼気チューブアームと、マスク又はカニューレに接続させるための呼吸チューブアームとを備えている。さらに、吸気体積と呼気体積とを測定するために呼吸チューブアームに配置される流量センサを有している。本発明によれば、呼吸チューブアームに所定の漏出部が形成され、流量センサは漏出部とマスク又は前記カニューレとの間に配置されている。
【0014】
漏出部は大きな体積の、すなわち長い呼吸チューブアームを可能にさせる。それ故ただ1つのチューブをマスク又はカニューレに接続させればよいので、患者は開放型シングルチューブシステムに接続されているかのように感じる。患者は患者に近い位置にある邪魔なチューブシステムと2つのチューブとを甘受せずに済む。呼吸器に近い位置でチューブシステムが吸気チューブアームと呼気チューブアームとに分割されているにすぎない。
【0015】
漏出部の利点は、呼吸器が何らかの理由から呼吸空気を提供しない場合も患者が呼吸できることである。患者はいつでも機械呼吸から離脱することができる。このとき呼吸空気は簡単に漏出部を通じて流れる。また患者はいつでも呼息することができ、すなわち呼気弁が閉じている場合でも呼息することができる。患者のこのような自由度は機械呼吸の窮屈な感情を軽減させる。漏出部が設けられているために、呼吸チューブは各吸息段階の前に洗浄される。その際、呼吸チューブ内にある呼息空気は漏出部を通じて押し出される。患者の肺が充填される呼吸圧が達成されるまで、呼吸チューブの内容物はすべて該呼吸チューブから流出する。したがって肺は新鮮な呼吸空気で充填される。
【0016】
最近の人口呼吸器はアルゴリズムを有しており、このアルゴリズムのおかげで、提供されるべき空気量、提供されるべき圧力、呼吸数を、流量センサで測定したパラメータに基づいて算出することができる。不確定な漏出部及び/又は所定の漏出部による損失は、人工呼吸器によって補償される。
【0017】
開放型呼吸チューブを呼気チューブアームを介して呼気弁に接続することにより、抵抗の少ない迅速な呼息が可能になる。
【0018】
合目的には、チューブシステムは複合構成であるのがよい。この場合構成部材は、吸気チューブ又は吸気チューブセットと、呼気チューブ又は呼気チューブセットと、Yピースと、開放型シングルチューブシステムの呼吸チューブ又は呼吸チューブセットと、流量センサである。場合によっては、流量センサとチューブシステム用のマスク又はカニューレとの間の接続チューブも属する。状況に応じては、チューブシステム用のマスク及び/又はカニューレも属する。
【0019】
流量センサは、有利には、ガス吸込用接続部とガス排出用接続部とを有するケーシングから成り、該ケーシングの内部空間は吸込用接続部と排出用接続部との間において絞りダイヤフラムにより2つのゾーンに分割されている。これらゾーン内のそれぞれに圧力測定装置又は該圧力測定装置への接続部が設けられている。絞りダイヤフラムは有利には弾性材料から成っている。その中に開口部が形成され、絞りダイヤフラムと一体に形成されるフラップは、前記開口部の形状と大きさに対応し、且つ絞りダイヤフラムとヒンジ状に結合されている。開口部のエッジは、有利には、ヒンジ状結合部から離間するように発散し、且つヒンジ状結合部に対し間隔を持って方向変換部を有し、ヒンジ状結合部に対し開口部の幅が最も狭くなる個所が形成されるようになっている。フラップは、前記ヒンジ状結合部のまわりに回動可能に形成され、ガス処理量が高い場合には、流出側のゾーンに開口する圧力測定穴の前方へ回動可能である。
【0020】
ただ1つの前記フラップは弾性を有し、ただ1つの前記開口部は、該開口部の抵抗が広い処理量範囲にわたって一定であることを保証するような形状を有している。
【0021】
この種の流量センサは公知であり、本出願人は従来のツインチューブシステムにおいて使用し成功を収めている。
【0022】
侵襲性呼吸に適した人口呼吸器は、能動的呼気弁及び従来のように能動的吸気弁を有し、吸気弁と患者と呼気弁とをY字状に結合させるための3アーム型チューブシステムを必要とする。このようなチューブシステムを、患者の近くに配置される流量センサに備えさせることは知られている。このような、チューブシステムを備えた人口呼吸器は、いまや新たに次のような特徴を有し、すなわち患者のほうへ向けられる呼吸チューブアームに所定の漏出部が設けられ、流量センサが漏出部とマスク又はカニューレとの間に配置されているという特徴を有する。この漏出部の利点は前述のとおりである。
【0023】
これに対応して、人工呼吸器の作動は新規なものになる。呼吸空気は、公知の態様で、能動制御される吸気弁と吸気チューブとを介して呼吸チューブと患者側の呼吸マスク又はカニューレとに供給される。呼息空気は、少なくとも部分的に、同様に公知の態様で、呼気チューブと能動制御される呼気弁とを介して排出される。呼吸数と呼吸体積とは患者側の流量センサを用いて監視される。呼吸圧と、呼気終末圧力と、呼吸数と、呼吸空気の体積とは、特に流量センサにより提供されるパラメータに基づいて調整される。この調整時に、チューブシステムに漏れがあれば、該漏れを、人工呼吸器内での流量測定と患者側の流量センサを用いた流量測定とにより定量的に特定し且つ人工呼吸器によって補償する。しかしながら、流量センサの患者とは逆の側に位置するように呼吸チューブ所定の漏出部を設けることは新規な構成である。本発明による方法の場合、呼気弁を備えている人工呼吸装置は、呼息段階終了時と吸息段階開始時との間の呼吸段階で、呼吸チューブ内にあるガスを漏出部を通じて押し出す。
【0024】
侵襲性呼吸に適した人工呼吸器を用いて患者を機械的に呼吸させるため、公知の態様で、患者側の流量センサを用いて呼吸数と呼吸圧と呼気終末圧力と呼吸体積とを監視する。流量センサによって検出したパラメータに基づいて且つ人工呼吸器のガス混合器と吸気弁と呼気弁とを用いて呼吸圧と呼吸体積と呼気終末圧力とを患者にとって適正となるように調整する。漏れがあれば、ガス混合器と吸気弁と呼気弁とを能動制御する。本発明によれば、患者の近くに配置される流量センサの患者とは逆の側に位置するように呼吸チューブに所定の漏出部が設けられ、患者の肺が新鮮な呼吸空気で充填される前に呼息空気の一部をこの漏出部を通じて排出させる。これには、公知のシングルチューブシステムを、ツインチューブシステムに対し設計された人工呼吸器とともに使用でき、したがって患者は呼吸器を交換することなく侵襲性呼吸と非侵襲性呼吸とを交替させることができるという利点がある。
【発明を実施するための最良の形態】
【0025】
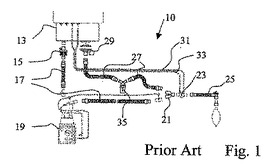
冒頭で述べたように、技術水準では、シングルチューブシステムとツインチューブシステムとがある。図1に図示した公知のツインチューブシステムは侵襲性呼吸に適するように構成されている。それ故、このツインチューブシステムは侵襲性呼吸に適している人工呼吸器13に接続される。この種の侵襲性人工呼吸器13は能動制御される2つの弁を有し、すなわち吸気弁(人工呼吸器の内部に配置されるので図示せず)と呼気弁29とを有している。呼吸器出口にフィルタ15を介して接続される吸気チューブセット17と、呼気弁29に接続される呼気チューブセット27とは、その人工呼吸器13とは逆の側の端部でYピース21に接続されている。Yピース21は両チューブ17と27をまとめており、且つこれらチューブを、患者に通じているチューブ25と結合させている。Yピースの患者側には流量センサ23が配置されている。流量センサ23は2つの空気管31,33を介して人工呼吸器13と結合されている。チューブセット17と27には補助器具を介装してもよい。吸気チューブセット17には加湿器19が接続されているのが合目的である。呼気チューブ27内には除水器35が設けられているのが合目的である。患者の呼吸空気は接続チューブ25と流量センサ23の内部のみを両方向に流動する。それ故、接続チューブ25と流量センサ23の容量は呼吸量を算出する際に連続デッドスペースとして考慮せねばならない。
【0026】
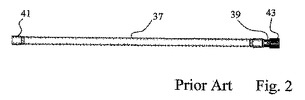
開放型シングルチューブシステムに対しては呼吸チューブ37が使用される。この種の公知の呼吸チューブ37(図2)はその全長にわたって呼吸空気が貫流する。この呼吸チューブ37が非常に大きな連続デッドスペースを形成しないようにするため、呼吸チューブ37は漏出部39を有している。この漏出部を通じて、呼息時とその後の吸息段階で、すなわち、必要な吸息圧が再び生成されるまで、消費された呼吸空気全量が実際に流出する。他方、この漏出部39からは、新鮮な呼吸空気の一部も流出する。呼吸チューブ37を患者と人工呼吸器との間に設置する場合に重要なことは、前記漏出部を患者に近い位置に設けて、連続デッドスペースをできるだけ小さくさせるように注意することである。それ故、呼吸チューブ37の前記漏出部から遠い側の端部41は人工呼吸器に接続され、前記漏出部に近い側の端部43はマスクに直接接続されるか、或いは、接続チューブ25を介してマスクに接続される。このように開放型呼吸システムは、従来非侵襲性のマスク呼吸用にのみ使用されていた。従来は、シングルチューブシステムのチューブをツインチューブシステム用の器具に接続させることは不可能であると見なされていた。
【0027】
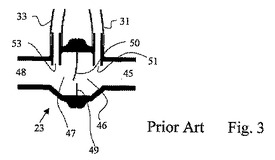
図3には、公知の流量センサ23の断面が概略的に図示されている。流量センサ23は、吸込用接続部45と、第1のチャンバー46と、第2のチャンバー47と、排出用接続部とをケーシング内に有している。第1及び第2のチャンバー46,47はダイヤフラム49により切り離されている。このダイヤフラム49は、開口部と、該開口部を塞ぐフラップ50とを有している。フラップ50は開き戸のように回動可能に構成されており、その結果フラップ50は、呼吸空気の流れがどの方向に向いているかに応じて一方のチャンバー内又は他方のチャンバー内へ進入することができる。流量センサ23は左右対称に構成されており、その結果流量センサ23は、呼吸空気が前記開口部を貫流する結果発生する圧力降下を両方向において測定することができる。前記チャンバー内の圧力はエアチューブ31,33を介して人工呼吸器に供給され、人工呼吸器内で測定される。前記圧力降下に基づいて人口呼吸器は呼吸空気内の圧力比と呼吸体積とを算出することができる。この算出は、実際には、流量センサと人工呼吸器13との間でどの程度の漏れがあるかに関係なく行なわれ、非常に代表的なものである。
【0028】
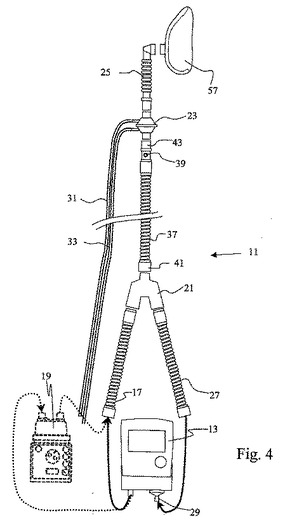
図4には本発明によるチューブシステム11が図示されている。その構成部材はそれぞれすでに公知のものである。しかしながら構成は新規なものであり、決定的な利点がある。吸気チューブ17と呼気チューブ27は短いチューブ片であり、たとえば図1のチューブシステム10においてフィルタ15と加湿器19との間に使用されているようなチューブ片である。その長さは、両チューブがその一端によって人工呼吸器13に接続できるような程度のものでよい。この人工呼吸器13とYピース21との間の領域には加湿器19を設けてもよい。これら人工呼吸器側の2つのチューブ17,27をまとめて呼吸チューブ37と結合させているYピースは従来より公知のYピースと同じものであってよい。これに接続している呼吸チューブ37は図2のチューブであり、同様に公知のものである。同様に、呼吸チューブ37の患者側に配置されている流量センサ23も公知のものである。それ故、これら公知の呼吸チューブ構成要素から成る本発明の構成の特徴は、Y字状のチューブシステムが形成され、該Y字状のチューブシステムは好ましくは短いアーム17,27を有し、これら短いアームを侵襲性人工呼吸器13に接続させることができる点にある。第3のアームは、患者側に設けられた所定の漏出部39を備える長い呼吸チューブ37である。さらに、流量センサ23と、合目的には接続チューブ25も、呼吸チューブに接続されている。接続チューブ25にはマスク57を配置してもよく、場合によってはカニューレを配置してもよい。
【0029】
人工呼吸器を保護するため、フィルタ15を設けてよい。このフィルタは呼吸器13と吸気チューブ17との間に設けることができる。
【0030】
上記チューブシステム11は公知のチューブシステムに比べて以下のような決定的な利点を有する。
【0031】
・上記の本発明によるチューブシステムを備えた、侵襲性呼吸用に設計された人口呼吸器は、非侵襲性呼吸に対しても使用できる。
【0032】
・侵襲性呼吸から非侵襲性呼吸へ交替させる場合、カニューレを備えたツインチューブシステムを、マスクを備えた本発明によるY型チューブシステムに交換するだけでよい。
【0033】
・非侵襲性呼吸から侵襲性呼吸へ交替させる場合、人口呼吸器は本来侵襲性呼吸に適しているので、迅速に処置できる。
【0034】
・スタンダードな構成要素を使用できる。
【0035】
・非侵襲性呼吸の場合、チューブシステムは重量と患者の機能障害に関し最小である。
【0036】
・非侵襲性呼吸の場合、チューブシステムは、最大の運動自由度と、自由な呼吸と、エラー時の安全性と、最小の呼息抵抗と、患者に近い位置での監視による最大のコントロールとを可能にする。
【0037】
・近位性の流量センサ(23)は実際に放出された呼吸体積を測定してチューブシステム内での漏れを自動的に補償するので、所定の漏出部(39)の測定に操作手段を必要としない。
【0038】
流量センサの校正は従来の方法で行なうことができるが、校正操作を行なっている間に、たとえば開口部に押し当てた指で漏出部を塞いでおく必要がある。
【図面の簡単な説明】
【0039】
【図1】侵襲性人工呼吸器のためのツインチューブシステムに関する公知の技術水準を示す図である。
【図2】開放型シングルチューブシステムに関する公知の技術水準を示す図である。
【図3】流量センサに関する公知の技術水準を示す図である。
【図4】本発明によるチューブシステムを示す図である。
【技術分野】
【0001】
本発明は、人工呼吸器用チューブシステム、この種のチューブシステムを備えた人工呼吸器、人工呼吸器の作動方法、患者を機械的に人工呼吸させるための方法に関するものである。
【背景技術】
【0002】
侵襲性呼吸に対してはツインチューブシステムが使用される。ツインチューブシステムは、Yピースを介して患者マスクに接続されている吸気チューブと呼気チューブとを有している。吸気チューブは人工呼吸器を汚染から保護する吸気フィルタに接続されている。場合によっては、呼吸器側の吸気チューブ片と患者側の吸気チューブ片との間に加湿器が配置される。また、Yピース患者側に、流量センサと、中間チューブを介してカニューレとが配置される場合がある。
【0003】
Yピースに接続している呼気チューブは呼吸空気を人工呼吸器へ戻し、場合によっては除水器を備えている。人口呼吸器は吸気弁と呼気弁とを有し、両弁とも能動制御される。吸息のために呼気弁が閉じられ、かつ吸気弁が開かれて、過圧が肺とチューブ内部に得られる。呼息の場合には呼気弁が開かれ、吸気弁が閉じられて、可能な限り抵抗のない呼息を保障する。吸気弁と呼気弁とが能動制御されるため、呼気終末圧力を配量することもできる。
【0004】
ツインチューブシステムにおいて実際の呼吸体積を検出して患者の自己活動を確認することができるようにするため、本出願人はYピースとマスクとの間に流量センサを接続することを提案した(特許文献1を参照)。
【0005】
非侵襲性機械呼吸に対してはシングルチューブシステム(single limb breathing systems)が使用される。シングルチューブシステムの特徴は、人工呼吸器を汚染から保護する吸気フィルタに接続して人工呼吸器と患者との間の距離を橋絡するただ1つの呼吸チューブと、マスクとを特徴としている。閉鎖型と開放型のシングルチューブシステムがある。閉鎖型シングルチューブシステムは能動的な呼気弁を有し、該呼気弁はほとんどの場合空気圧チューブを介して人工呼吸器により制御される。呼気弁は患者側で呼吸チューブ内に着座している。本システムには圧力測定チューブを設けることが多く、該圧力測定チューブを介して呼吸空気又は呼息空気を呼気弁において測定することができ、患者の有効通気量を算出することができるようになっている。呼気弁が患者の顔の直前に配置されないようにするため、呼気弁とマスクとの間に中間チューブが配置されることもある。患者は人工呼吸器から呼吸チューブを通じて呼吸する。患者が吸息する場合、呼気弁は、チューブ内にある過圧がマスクと患者の肺とへ到達する吸気位置にある。マスク内に呼吸空気の所望の過圧を発生させるための呼気穴は閉じている。呼息の場合には、呼気弁は、チューブとマスクとの接続が遮断され、しかし呼気空気ができるだけ小さな抵抗で呼気穴を通じて逃がすことができるような呼気位置にある。このようなシングルチューブシステムは実質的にツインチューブシステムと同等である。実質的にツインシングルチューブシステムと異なるのは、呼気弁が患者に近い位置に配置されており、それ故人工呼吸器から離れている点だけである。
【0006】
このようなシングルチューブシステムの欠点は、マスクにかかる重量と患者側の呼気弁の存在が患者にとって邪魔になることである。
【0007】
このような欠点を解消するため、能動的な呼気弁を省略した開放型シングルチューブシステムもある。このような開放型システムの呼吸チューブは所定の漏出部を有している。この漏出部は呼吸チューブに設けた穴によって定義され、穴は選定された横断面を有している。この漏出部はチューブの患者側端部に形成されている。前記穴を通じて呼息空気が逃げる。この穴を通じて新鮮な呼吸空気の一部も逃げる。したがってこの種のシングルチューブシステムでは、患者が必要とする呼吸空気よりも多くの呼吸空気を調製してチューブを通じ搬送しなければならない。必要量の呼吸空気を算出することができるように、前記漏出部ではチューブ内の圧力が測定され、或いは、製造者が検出したチューブシステムを特徴付ける特性データに基づいてコンピュータで近似させる。この開放型シングルチューブシステムは、患者がただ1つのチューブとマスクのみを担持するだけなので、患者にとって快適である。患者は人工呼吸器の圧力に抗していつでも呼息することができ、人口呼吸器が呼吸空気を提供しない場合でもいつでも吸息することができる。
【0008】
開放型シングルチューブシステムの場合、呼息時に呼吸チューブ内の圧力が人工呼吸器により短時間排出される。これにより患者の抵抗のない呼息が可能になる。この場合、消費された呼息空気は呼吸チューブ内へ流れる。呼息時間終了直前に呼吸チューブ内の呼吸圧が再び生成される。これにより、次の吸息までの呼吸段階の間に、チューブ内にある呼気空気が漏出部から押し出されてチューブが洗浄される。
【0009】
それ故、侵襲性呼吸から非侵襲性呼吸へ交替させる場合は、通常、ツインチューブシステムから開放型シングルチューブシステムに置換して、患者を重いツインチューブシステムから解放させる。しかしながら、侵襲性呼吸用の人口呼吸器は、チューブ内や肺の呼吸圧をコントロールできるように呼気チューブを呼気弁に接続するよう指定されているので、従来はチューブシステムと一緒に人工呼吸器をも交換する必要があった。
【0010】
【特許文献1】米国特許第4083245号明細書
【発明の開示】
【発明が解決しようとする課題】
【0011】
したがって、本発明の課題は、侵襲性呼吸用に能動的吸気弁と能動的呼気弁とを備えた人工呼吸器において、患者にとって快適な軽量なチューブシステム、特にシングルチューブシステムの市販のチューブでもって非侵襲性呼吸に使用できるようにすることである。
【課題を解決するための手段】
【0012】
この課題は請求項1の構成によって解決される。
【0013】
これによれば、能動的吸気弁と能動的呼気弁とを有する侵襲性呼吸に適した人工呼吸器のための3アーム型の、すなわちY字状に形成されたチューブシステムが、人工呼吸器の吸気弁に接続するための吸気チューブアームと、人工呼吸器の呼気弁に接続させるための呼気チューブアームと、マスク又はカニューレに接続させるための呼吸チューブアームとを備えている。さらに、吸気体積と呼気体積とを測定するために呼吸チューブアームに配置される流量センサを有している。本発明によれば、呼吸チューブアームに所定の漏出部が形成され、流量センサは漏出部とマスク又は前記カニューレとの間に配置されている。
【0014】
漏出部は大きな体積の、すなわち長い呼吸チューブアームを可能にさせる。それ故ただ1つのチューブをマスク又はカニューレに接続させればよいので、患者は開放型シングルチューブシステムに接続されているかのように感じる。患者は患者に近い位置にある邪魔なチューブシステムと2つのチューブとを甘受せずに済む。呼吸器に近い位置でチューブシステムが吸気チューブアームと呼気チューブアームとに分割されているにすぎない。
【0015】
漏出部の利点は、呼吸器が何らかの理由から呼吸空気を提供しない場合も患者が呼吸できることである。患者はいつでも機械呼吸から離脱することができる。このとき呼吸空気は簡単に漏出部を通じて流れる。また患者はいつでも呼息することができ、すなわち呼気弁が閉じている場合でも呼息することができる。患者のこのような自由度は機械呼吸の窮屈な感情を軽減させる。漏出部が設けられているために、呼吸チューブは各吸息段階の前に洗浄される。その際、呼吸チューブ内にある呼息空気は漏出部を通じて押し出される。患者の肺が充填される呼吸圧が達成されるまで、呼吸チューブの内容物はすべて該呼吸チューブから流出する。したがって肺は新鮮な呼吸空気で充填される。
【0016】
最近の人口呼吸器はアルゴリズムを有しており、このアルゴリズムのおかげで、提供されるべき空気量、提供されるべき圧力、呼吸数を、流量センサで測定したパラメータに基づいて算出することができる。不確定な漏出部及び/又は所定の漏出部による損失は、人工呼吸器によって補償される。
【0017】
開放型呼吸チューブを呼気チューブアームを介して呼気弁に接続することにより、抵抗の少ない迅速な呼息が可能になる。
【0018】
合目的には、チューブシステムは複合構成であるのがよい。この場合構成部材は、吸気チューブ又は吸気チューブセットと、呼気チューブ又は呼気チューブセットと、Yピースと、開放型シングルチューブシステムの呼吸チューブ又は呼吸チューブセットと、流量センサである。場合によっては、流量センサとチューブシステム用のマスク又はカニューレとの間の接続チューブも属する。状況に応じては、チューブシステム用のマスク及び/又はカニューレも属する。
【0019】
流量センサは、有利には、ガス吸込用接続部とガス排出用接続部とを有するケーシングから成り、該ケーシングの内部空間は吸込用接続部と排出用接続部との間において絞りダイヤフラムにより2つのゾーンに分割されている。これらゾーン内のそれぞれに圧力測定装置又は該圧力測定装置への接続部が設けられている。絞りダイヤフラムは有利には弾性材料から成っている。その中に開口部が形成され、絞りダイヤフラムと一体に形成されるフラップは、前記開口部の形状と大きさに対応し、且つ絞りダイヤフラムとヒンジ状に結合されている。開口部のエッジは、有利には、ヒンジ状結合部から離間するように発散し、且つヒンジ状結合部に対し間隔を持って方向変換部を有し、ヒンジ状結合部に対し開口部の幅が最も狭くなる個所が形成されるようになっている。フラップは、前記ヒンジ状結合部のまわりに回動可能に形成され、ガス処理量が高い場合には、流出側のゾーンに開口する圧力測定穴の前方へ回動可能である。
【0020】
ただ1つの前記フラップは弾性を有し、ただ1つの前記開口部は、該開口部の抵抗が広い処理量範囲にわたって一定であることを保証するような形状を有している。
【0021】
この種の流量センサは公知であり、本出願人は従来のツインチューブシステムにおいて使用し成功を収めている。
【0022】
侵襲性呼吸に適した人口呼吸器は、能動的呼気弁及び従来のように能動的吸気弁を有し、吸気弁と患者と呼気弁とをY字状に結合させるための3アーム型チューブシステムを必要とする。このようなチューブシステムを、患者の近くに配置される流量センサに備えさせることは知られている。このような、チューブシステムを備えた人口呼吸器は、いまや新たに次のような特徴を有し、すなわち患者のほうへ向けられる呼吸チューブアームに所定の漏出部が設けられ、流量センサが漏出部とマスク又はカニューレとの間に配置されているという特徴を有する。この漏出部の利点は前述のとおりである。
【0023】
これに対応して、人工呼吸器の作動は新規なものになる。呼吸空気は、公知の態様で、能動制御される吸気弁と吸気チューブとを介して呼吸チューブと患者側の呼吸マスク又はカニューレとに供給される。呼息空気は、少なくとも部分的に、同様に公知の態様で、呼気チューブと能動制御される呼気弁とを介して排出される。呼吸数と呼吸体積とは患者側の流量センサを用いて監視される。呼吸圧と、呼気終末圧力と、呼吸数と、呼吸空気の体積とは、特に流量センサにより提供されるパラメータに基づいて調整される。この調整時に、チューブシステムに漏れがあれば、該漏れを、人工呼吸器内での流量測定と患者側の流量センサを用いた流量測定とにより定量的に特定し且つ人工呼吸器によって補償する。しかしながら、流量センサの患者とは逆の側に位置するように呼吸チューブ所定の漏出部を設けることは新規な構成である。本発明による方法の場合、呼気弁を備えている人工呼吸装置は、呼息段階終了時と吸息段階開始時との間の呼吸段階で、呼吸チューブ内にあるガスを漏出部を通じて押し出す。
【0024】
侵襲性呼吸に適した人工呼吸器を用いて患者を機械的に呼吸させるため、公知の態様で、患者側の流量センサを用いて呼吸数と呼吸圧と呼気終末圧力と呼吸体積とを監視する。流量センサによって検出したパラメータに基づいて且つ人工呼吸器のガス混合器と吸気弁と呼気弁とを用いて呼吸圧と呼吸体積と呼気終末圧力とを患者にとって適正となるように調整する。漏れがあれば、ガス混合器と吸気弁と呼気弁とを能動制御する。本発明によれば、患者の近くに配置される流量センサの患者とは逆の側に位置するように呼吸チューブに所定の漏出部が設けられ、患者の肺が新鮮な呼吸空気で充填される前に呼息空気の一部をこの漏出部を通じて排出させる。これには、公知のシングルチューブシステムを、ツインチューブシステムに対し設計された人工呼吸器とともに使用でき、したがって患者は呼吸器を交換することなく侵襲性呼吸と非侵襲性呼吸とを交替させることができるという利点がある。
【発明を実施するための最良の形態】
【0025】
冒頭で述べたように、技術水準では、シングルチューブシステムとツインチューブシステムとがある。図1に図示した公知のツインチューブシステムは侵襲性呼吸に適するように構成されている。それ故、このツインチューブシステムは侵襲性呼吸に適している人工呼吸器13に接続される。この種の侵襲性人工呼吸器13は能動制御される2つの弁を有し、すなわち吸気弁(人工呼吸器の内部に配置されるので図示せず)と呼気弁29とを有している。呼吸器出口にフィルタ15を介して接続される吸気チューブセット17と、呼気弁29に接続される呼気チューブセット27とは、その人工呼吸器13とは逆の側の端部でYピース21に接続されている。Yピース21は両チューブ17と27をまとめており、且つこれらチューブを、患者に通じているチューブ25と結合させている。Yピースの患者側には流量センサ23が配置されている。流量センサ23は2つの空気管31,33を介して人工呼吸器13と結合されている。チューブセット17と27には補助器具を介装してもよい。吸気チューブセット17には加湿器19が接続されているのが合目的である。呼気チューブ27内には除水器35が設けられているのが合目的である。患者の呼吸空気は接続チューブ25と流量センサ23の内部のみを両方向に流動する。それ故、接続チューブ25と流量センサ23の容量は呼吸量を算出する際に連続デッドスペースとして考慮せねばならない。
【0026】
開放型シングルチューブシステムに対しては呼吸チューブ37が使用される。この種の公知の呼吸チューブ37(図2)はその全長にわたって呼吸空気が貫流する。この呼吸チューブ37が非常に大きな連続デッドスペースを形成しないようにするため、呼吸チューブ37は漏出部39を有している。この漏出部を通じて、呼息時とその後の吸息段階で、すなわち、必要な吸息圧が再び生成されるまで、消費された呼吸空気全量が実際に流出する。他方、この漏出部39からは、新鮮な呼吸空気の一部も流出する。呼吸チューブ37を患者と人工呼吸器との間に設置する場合に重要なことは、前記漏出部を患者に近い位置に設けて、連続デッドスペースをできるだけ小さくさせるように注意することである。それ故、呼吸チューブ37の前記漏出部から遠い側の端部41は人工呼吸器に接続され、前記漏出部に近い側の端部43はマスクに直接接続されるか、或いは、接続チューブ25を介してマスクに接続される。このように開放型呼吸システムは、従来非侵襲性のマスク呼吸用にのみ使用されていた。従来は、シングルチューブシステムのチューブをツインチューブシステム用の器具に接続させることは不可能であると見なされていた。
【0027】
図3には、公知の流量センサ23の断面が概略的に図示されている。流量センサ23は、吸込用接続部45と、第1のチャンバー46と、第2のチャンバー47と、排出用接続部とをケーシング内に有している。第1及び第2のチャンバー46,47はダイヤフラム49により切り離されている。このダイヤフラム49は、開口部と、該開口部を塞ぐフラップ50とを有している。フラップ50は開き戸のように回動可能に構成されており、その結果フラップ50は、呼吸空気の流れがどの方向に向いているかに応じて一方のチャンバー内又は他方のチャンバー内へ進入することができる。流量センサ23は左右対称に構成されており、その結果流量センサ23は、呼吸空気が前記開口部を貫流する結果発生する圧力降下を両方向において測定することができる。前記チャンバー内の圧力はエアチューブ31,33を介して人工呼吸器に供給され、人工呼吸器内で測定される。前記圧力降下に基づいて人口呼吸器は呼吸空気内の圧力比と呼吸体積とを算出することができる。この算出は、実際には、流量センサと人工呼吸器13との間でどの程度の漏れがあるかに関係なく行なわれ、非常に代表的なものである。
【0028】
図4には本発明によるチューブシステム11が図示されている。その構成部材はそれぞれすでに公知のものである。しかしながら構成は新規なものであり、決定的な利点がある。吸気チューブ17と呼気チューブ27は短いチューブ片であり、たとえば図1のチューブシステム10においてフィルタ15と加湿器19との間に使用されているようなチューブ片である。その長さは、両チューブがその一端によって人工呼吸器13に接続できるような程度のものでよい。この人工呼吸器13とYピース21との間の領域には加湿器19を設けてもよい。これら人工呼吸器側の2つのチューブ17,27をまとめて呼吸チューブ37と結合させているYピースは従来より公知のYピースと同じものであってよい。これに接続している呼吸チューブ37は図2のチューブであり、同様に公知のものである。同様に、呼吸チューブ37の患者側に配置されている流量センサ23も公知のものである。それ故、これら公知の呼吸チューブ構成要素から成る本発明の構成の特徴は、Y字状のチューブシステムが形成され、該Y字状のチューブシステムは好ましくは短いアーム17,27を有し、これら短いアームを侵襲性人工呼吸器13に接続させることができる点にある。第3のアームは、患者側に設けられた所定の漏出部39を備える長い呼吸チューブ37である。さらに、流量センサ23と、合目的には接続チューブ25も、呼吸チューブに接続されている。接続チューブ25にはマスク57を配置してもよく、場合によってはカニューレを配置してもよい。
【0029】
人工呼吸器を保護するため、フィルタ15を設けてよい。このフィルタは呼吸器13と吸気チューブ17との間に設けることができる。
【0030】
上記チューブシステム11は公知のチューブシステムに比べて以下のような決定的な利点を有する。
【0031】
・上記の本発明によるチューブシステムを備えた、侵襲性呼吸用に設計された人口呼吸器は、非侵襲性呼吸に対しても使用できる。
【0032】
・侵襲性呼吸から非侵襲性呼吸へ交替させる場合、カニューレを備えたツインチューブシステムを、マスクを備えた本発明によるY型チューブシステムに交換するだけでよい。
【0033】
・非侵襲性呼吸から侵襲性呼吸へ交替させる場合、人口呼吸器は本来侵襲性呼吸に適しているので、迅速に処置できる。
【0034】
・スタンダードな構成要素を使用できる。
【0035】
・非侵襲性呼吸の場合、チューブシステムは重量と患者の機能障害に関し最小である。
【0036】
・非侵襲性呼吸の場合、チューブシステムは、最大の運動自由度と、自由な呼吸と、エラー時の安全性と、最小の呼息抵抗と、患者に近い位置での監視による最大のコントロールとを可能にする。
【0037】
・近位性の流量センサ(23)は実際に放出された呼吸体積を測定してチューブシステム内での漏れを自動的に補償するので、所定の漏出部(39)の測定に操作手段を必要としない。
【0038】
流量センサの校正は従来の方法で行なうことができるが、校正操作を行なっている間に、たとえば開口部に押し当てた指で漏出部を塞いでおく必要がある。
【図面の簡単な説明】
【0039】
【図1】侵襲性人工呼吸器のためのツインチューブシステムに関する公知の技術水準を示す図である。
【図2】開放型シングルチューブシステムに関する公知の技術水準を示す図である。
【図3】流量センサに関する公知の技術水準を示す図である。
【図4】本発明によるチューブシステムを示す図である。
【特許請求の範囲】
【請求項1】
能動的吸気弁と能動的呼気弁(29)とを有する侵襲性呼吸に適した人工呼吸器(13)のための3アーム型チューブシステム(11)であって、
人工呼吸器(13)の前記吸気弁に接続するための吸気チューブアーム(17)と、
人工呼吸器(13)の前記呼気弁(29)に接続させるための呼気チューブアーム(27)と、
マスク(57)又はカニューレに接続させるための呼吸チューブアーム(37)と、
を備えて成り、
吸気体積と呼気体積とを測定するために前記呼吸チューブアーム(37)に配置される流量センサ(23)を有している
前記チューブシステムにおいて、
前記呼吸チューブアーム(37)に所定の漏出部(39)が形成されていること、
前記流量センサ(23)が前記漏出部(39)と前記マスク(57)又は前記カニューレとの間に配置されている、又は配置されること、
を特徴とするチューブシステム。
【請求項2】
チューブシステム(11)が、吸気チューブ(17)又は吸気チューブセットと、呼気チューブ(27)又は呼気チューブセットと、Yピース(21)と、開放型シングルチューブシステムの呼吸チューブ(37)又は呼吸チューブセットと、流量センサ(23)と、場合によっては接続チューブ(25)と、マスク(57)及び/又は状況に応じてはカニューレとを含んでいることを特徴とする請求項1に記載のチューブシステム。
【請求項3】
前記流量センサ(23)がガス吸込用接続部(45)とガス排出用接続部(48)とを有するケーシングから成り、該ケーシングの内部空間が前記吸込用接続部(45)と前記排出用接続部(48)との間において絞りダイヤフラム(49)により2つのゾーン(46,47)に分割され、これらゾーン内のそれぞれに圧力測定装置が設けられ、又は該圧力測定装置への接続部(51,53)が設けられていることを特徴とする請求項1又は2に記載のチューブシステム。
【請求項4】
前記絞りダイヤフラム(49)が弾性材料から成り、その中に開口部が形成されていること、前記絞りダイヤフラムと一体に形成されるフラップ(50)が、前記開口部の形状と大きさに対応し、且つ前記絞りダイヤフラム(49)とヒンジ状に結合されていることを特徴とする請求項3に記載のチューブシステム。
【請求項5】
ヒンジ状結合部に対し前記開口部の幅が最も狭くなる個所が形成されるように、該開口部のエッジが、ヒンジ状結合部から離間するように発散して延びており、且つ該ヒンジ状結合部に対し間隔を持って方向変換部を有していることを特徴とする請求項3又は4に記載のチューブシステム。
【請求項6】
前記フラップ(50)が、前記ヒンジ状結合部のまわりに回動可能に形成され、ガス処理量が高い場合には、流出側のゾーン(47)に開口する圧力測定穴(53)の前方へ回動可能であることを特徴とする請求項3から5までのいずれか一つに記載のチューブシステム。
【請求項7】
絞りダイヤフラム(49)にただ1つのフラップ(50)とただ1つの開口部とが形成されていることを特徴とする請求項3から7までのいずれか一つに記載のチューブシステム。
【請求項8】
広い処理量範囲にわたって前記開口部の抵抗が一定であるように前記フラップ(50)の形状と弾性とが設定されていることを特徴とする請求項3から5までのいずれか一つに記載のチューブシステム。
【請求項9】
能動的呼気弁(29)及び能動的吸気弁と、該能動的吸気弁及び能動的呼気弁(29)を患者マスク(57)又はカニューレと結合させるための3アーム型チューブシステム(11)と、患者の近くに配置される流量センサ(23)とを備える、侵襲性呼吸に適した人工呼吸器(13)において、
患者のほうへ向けられる呼吸チューブアーム(37)に所定の漏出部(39)が設けられていること、
前記流量センサ(23)が前記漏出部(39)と前記マスク(57)又は前記カニューレとの間に配置されていること、
を特徴とする人工呼吸器。
【請求項10】
人工呼吸器(13)により呼吸空気を能動制御される吸気弁と吸気チューブ(17)とを介して呼吸チューブ(37)と患者側の呼吸マスク(57)又はカニューレとに供給し、呼息空気を呼吸チューブ(37)と呼気チューブ(27)と能動制御される吸気弁(29)とを介して排出させ、呼吸数と呼吸体積とを患者側の流量センサ(23)を用いて監視し、その際に呼吸圧と、呼気終末圧力と、呼吸数と、呼吸空気の体積とを、特に前記流量センサ(23)により提供されるパラメータに基づいて調整し、チューブシステム(11)に漏れがあれば、該漏れを、人工呼吸器(13)内での流量測定と患者側の前記流量センサ(23)を用いた流量測定とにより定量的に特定し且つ人工呼吸器(13)によって補償するようにした、人工呼吸器(13)の作動方法において、
患者に対して、前記流量センサ(23)の逆の側に位置するように、呼吸チューブ(37)に所定の漏出部(39)を設け、
呼息段階終了時と吸息段階開始時との間の呼吸段階で、人工呼吸器(13)が呼吸チューブ(37)内にあるガスを前記漏出部(39)を通じて押し出すこと、
を特徴とする作動方法。
【請求項11】
侵襲性呼吸に適した人工呼吸器(13)を用いて患者を機械的に呼吸させるための方法であって、患者側の流量センサ(23)を用いて呼吸数と呼吸圧と呼気終末圧力と呼吸体積とを監視し、前記流量センサ(23)によって検出したパラメータに基づいて且つ人工呼吸器(13)のガス混合器と吸気弁と呼気弁(29)とを用いて呼吸圧と呼吸体積と呼気終末圧力とを患者にとって適正となるように調整し、漏れがあれば、前記ガス混合器と前記吸気弁と前記呼気弁(29)とを能動制御することで前記漏れを補償するようにした前記方法において、
患者の近くに配置される前記流量センサ(23)の患者とは逆の側に位置するように呼吸チューブ(37)に所定の漏出部(39)を設け、呼息空気の一部をこの漏出部(39)を通じて排出させること、
を特徴とする方法。
【請求項12】
開放型シングルチューブシステム(37)を、Yピース(21)、吸気チューブ(17)、呼気チューブ(27)とともに、能動制御される吸気弁と能動制御される呼気弁(29)とを備えた人工呼吸器(13)に使用する使用方法。
【請求項13】
請求項12に記載の開放型シングルチューブ(37)を、患者の近くに位置するように該シングルチューブシステム(37)に配置されている流量センサ(23)とともに使用する使用方法。
【請求項1】
能動的吸気弁と能動的呼気弁(29)とを有する侵襲性呼吸に適した人工呼吸器(13)のための3アーム型チューブシステム(11)であって、
人工呼吸器(13)の前記吸気弁に接続するための吸気チューブアーム(17)と、
人工呼吸器(13)の前記呼気弁(29)に接続させるための呼気チューブアーム(27)と、
マスク(57)又はカニューレに接続させるための呼吸チューブアーム(37)と、
を備えて成り、
吸気体積と呼気体積とを測定するために前記呼吸チューブアーム(37)に配置される流量センサ(23)を有している
前記チューブシステムにおいて、
前記呼吸チューブアーム(37)に所定の漏出部(39)が形成されていること、
前記流量センサ(23)が前記漏出部(39)と前記マスク(57)又は前記カニューレとの間に配置されている、又は配置されること、
を特徴とするチューブシステム。
【請求項2】
チューブシステム(11)が、吸気チューブ(17)又は吸気チューブセットと、呼気チューブ(27)又は呼気チューブセットと、Yピース(21)と、開放型シングルチューブシステムの呼吸チューブ(37)又は呼吸チューブセットと、流量センサ(23)と、場合によっては接続チューブ(25)と、マスク(57)及び/又は状況に応じてはカニューレとを含んでいることを特徴とする請求項1に記載のチューブシステム。
【請求項3】
前記流量センサ(23)がガス吸込用接続部(45)とガス排出用接続部(48)とを有するケーシングから成り、該ケーシングの内部空間が前記吸込用接続部(45)と前記排出用接続部(48)との間において絞りダイヤフラム(49)により2つのゾーン(46,47)に分割され、これらゾーン内のそれぞれに圧力測定装置が設けられ、又は該圧力測定装置への接続部(51,53)が設けられていることを特徴とする請求項1又は2に記載のチューブシステム。
【請求項4】
前記絞りダイヤフラム(49)が弾性材料から成り、その中に開口部が形成されていること、前記絞りダイヤフラムと一体に形成されるフラップ(50)が、前記開口部の形状と大きさに対応し、且つ前記絞りダイヤフラム(49)とヒンジ状に結合されていることを特徴とする請求項3に記載のチューブシステム。
【請求項5】
ヒンジ状結合部に対し前記開口部の幅が最も狭くなる個所が形成されるように、該開口部のエッジが、ヒンジ状結合部から離間するように発散して延びており、且つ該ヒンジ状結合部に対し間隔を持って方向変換部を有していることを特徴とする請求項3又は4に記載のチューブシステム。
【請求項6】
前記フラップ(50)が、前記ヒンジ状結合部のまわりに回動可能に形成され、ガス処理量が高い場合には、流出側のゾーン(47)に開口する圧力測定穴(53)の前方へ回動可能であることを特徴とする請求項3から5までのいずれか一つに記載のチューブシステム。
【請求項7】
絞りダイヤフラム(49)にただ1つのフラップ(50)とただ1つの開口部とが形成されていることを特徴とする請求項3から7までのいずれか一つに記載のチューブシステム。
【請求項8】
広い処理量範囲にわたって前記開口部の抵抗が一定であるように前記フラップ(50)の形状と弾性とが設定されていることを特徴とする請求項3から5までのいずれか一つに記載のチューブシステム。
【請求項9】
能動的呼気弁(29)及び能動的吸気弁と、該能動的吸気弁及び能動的呼気弁(29)を患者マスク(57)又はカニューレと結合させるための3アーム型チューブシステム(11)と、患者の近くに配置される流量センサ(23)とを備える、侵襲性呼吸に適した人工呼吸器(13)において、
患者のほうへ向けられる呼吸チューブアーム(37)に所定の漏出部(39)が設けられていること、
前記流量センサ(23)が前記漏出部(39)と前記マスク(57)又は前記カニューレとの間に配置されていること、
を特徴とする人工呼吸器。
【請求項10】
人工呼吸器(13)により呼吸空気を能動制御される吸気弁と吸気チューブ(17)とを介して呼吸チューブ(37)と患者側の呼吸マスク(57)又はカニューレとに供給し、呼息空気を呼吸チューブ(37)と呼気チューブ(27)と能動制御される吸気弁(29)とを介して排出させ、呼吸数と呼吸体積とを患者側の流量センサ(23)を用いて監視し、その際に呼吸圧と、呼気終末圧力と、呼吸数と、呼吸空気の体積とを、特に前記流量センサ(23)により提供されるパラメータに基づいて調整し、チューブシステム(11)に漏れがあれば、該漏れを、人工呼吸器(13)内での流量測定と患者側の前記流量センサ(23)を用いた流量測定とにより定量的に特定し且つ人工呼吸器(13)によって補償するようにした、人工呼吸器(13)の作動方法において、
患者に対して、前記流量センサ(23)の逆の側に位置するように、呼吸チューブ(37)に所定の漏出部(39)を設け、
呼息段階終了時と吸息段階開始時との間の呼吸段階で、人工呼吸器(13)が呼吸チューブ(37)内にあるガスを前記漏出部(39)を通じて押し出すこと、
を特徴とする作動方法。
【請求項11】
侵襲性呼吸に適した人工呼吸器(13)を用いて患者を機械的に呼吸させるための方法であって、患者側の流量センサ(23)を用いて呼吸数と呼吸圧と呼気終末圧力と呼吸体積とを監視し、前記流量センサ(23)によって検出したパラメータに基づいて且つ人工呼吸器(13)のガス混合器と吸気弁と呼気弁(29)とを用いて呼吸圧と呼吸体積と呼気終末圧力とを患者にとって適正となるように調整し、漏れがあれば、前記ガス混合器と前記吸気弁と前記呼気弁(29)とを能動制御することで前記漏れを補償するようにした前記方法において、
患者の近くに配置される前記流量センサ(23)の患者とは逆の側に位置するように呼吸チューブ(37)に所定の漏出部(39)を設け、呼息空気の一部をこの漏出部(39)を通じて排出させること、
を特徴とする方法。
【請求項12】
開放型シングルチューブシステム(37)を、Yピース(21)、吸気チューブ(17)、呼気チューブ(27)とともに、能動制御される吸気弁と能動制御される呼気弁(29)とを備えた人工呼吸器(13)に使用する使用方法。
【請求項13】
請求項12に記載の開放型シングルチューブ(37)を、患者の近くに位置するように該シングルチューブシステム(37)に配置されている流量センサ(23)とともに使用する使用方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2009−519058(P2009−519058A)
【公表日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2008−544725(P2008−544725)
【出願日】平成18年11月9日(2006.11.9)
【国際出願番号】PCT/CH2006/000631
【国際公開番号】WO2007/068132
【国際公開日】平成19年6月21日(2007.6.21)
【出願人】(508180482)ハミルトン・メディカル・アーゲー (7)
【Fターム(参考)】
【公表日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成18年11月9日(2006.11.9)
【国際出願番号】PCT/CH2006/000631
【国際公開番号】WO2007/068132
【国際公開日】平成19年6月21日(2007.6.21)
【出願人】(508180482)ハミルトン・メディカル・アーゲー (7)
【Fターム(参考)】
[ Back to top ]