
人工衛星の放出装置
【課題】軌道上での人工衛星のセットや再使用が可能であり、放出する人工衛星の形状や大きさに制限が少ない人工衛星の放出装置を提供する。
【解決手段】放出される人工衛星に設けたアダプタ1と、人工衛星をアダプタ1の部分で保持する基台2を備えると共に、基台に、弾性体5によって前進方向に付勢された衛星放出用のプランジャ6と、プランジャ6に当接したアダプタ1を把持・解放するクランプ7と、弾性体5に抗して後退させたプランジャ6をその後退位置で拘束するロック機構8を備えた放出装置Aとしたことにより、軌道上であっても人工衛星を簡単にセットすることができると共に、繰り返し使用することを可能にし、放出する人工衛星の形状や大きさの制約を少なくした。
【解決手段】放出される人工衛星に設けたアダプタ1と、人工衛星をアダプタ1の部分で保持する基台2を備えると共に、基台に、弾性体5によって前進方向に付勢された衛星放出用のプランジャ6と、プランジャ6に当接したアダプタ1を把持・解放するクランプ7と、弾性体5に抗して後退させたプランジャ6をその後退位置で拘束するロック機構8を備えた放出装置Aとしたことにより、軌道上であっても人工衛星を簡単にセットすることができると共に、繰り返し使用することを可能にし、放出する人工衛星の形状や大きさの制約を少なくした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、宇宙空間において、宇宙ステーション等の宇宙航行体から人工衛星を放出するのに用いられる人工衛星の放出装置に関するものである。
【背景技術】
【0002】
従来、人工衛星を放出する装置としては、例えば、非特許文献1に記載されたようなものがあった。非特許文献1に記載の装置は、ロケット打ち上げ時において、主衛星に対して小型衛星(ピギーバック衛星)を保持し、主衛星の軌道上で小型衛星を分離するものであって、小型衛星の四隅の支柱から伸ばした足を分離機構側の爪で把持する構造になっている。分離機構は、ナイロン線で可動部を固縛することで小型衛星を機械的に把持した状態でラッチをかけ、小型衛星を分離する際には、ナイロン線を溶断することでばね力によりラッチを外し、押し出しばねにより小型衛星を放出するようになっている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】ISAS/JAXA2007 Space Utiliz Res,23(2007)、p.1 1 7−1 20、『超小型衛星用分離機構システムの落下棟無重力試験とM−Vロケットによる軌道上実証』
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記したような従来の人工衛星の放出装置は、主衛星に搭載した小型衛星を放出するものであるから、打ち上げ前に予め小型衛星をセットしておく必要があると共に、分離時にはナイロン線の溶断すなわち構成部位の破壊を伴うものとなっている。このため、従来の人工衛星の放出装置は、宇宙空間の軌道上での人工衛星のセットや再使用ができないうえに、放出する人工衛星の形状や大きさに制限があるという問題点があり、このような問題点を解決することが課題であった。
【0005】
本発明は、上記従来の課題に着目して成されたもので、宇宙空間の軌道上であっても人工衛星を簡単にセットすることができると共に、繰り返し使用することが可能であり、放出する人工衛星の形状や大きさの制約を少なくすることができる人工衛星の放出装置を提共することを目的としている。
【課題を解決するための手段】
【0006】
本発明の人工衛星の放出装置は、宇宙空間において宇宙航行体から人工衛星を放出する装置であって、放出される人工衛星に設けたアダプタと、人工衛星をアダプタの部分で保持する基台を福えると共に、基台に、弾性体によって前進方向に付勢された衛星放出用のプランジャと、プランジャに当接したアダプタを把持・解放するクランプと、弾性体に抗して後退させたプランジャをその後退位置で拘束するロック機構を備えた構成としており、上記構成をもって従来の課題を解決するための手段としている。
【0007】
また、本発明の人工衛星の放出装置は、より好ましい実施形態として、前記クランプが、プランジャの移動方向に対して回動可能であって、プランジャの後退に伴って後退回動しごアダプタを把持すると共に、プランジャの前進に伴って前進回動してアダプタを解放することを特徴としている。
【発明の効果】
【0008】
本発明の人工衛星の放出装置によれば、上記構成を採用したことにより、宇宙空間の軌道上であっても人工衛星を簡単にセットすることができると共に、構成部位の破壊を伴わないので繰り返し使用することが可能であり、放出する人工衛星の形状や大きさの制約を少なくすることができる。
【図面の簡単な説明】
【0009】
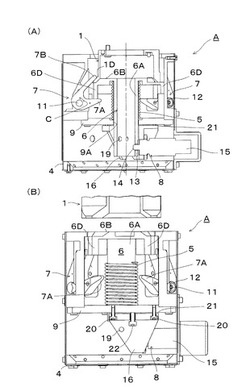
【図1】本発明に係る人工衛星の放出装置の一実施形態において、拘束状態を示す斜視図(A)及び解放状態を示す斜視図(B)である。
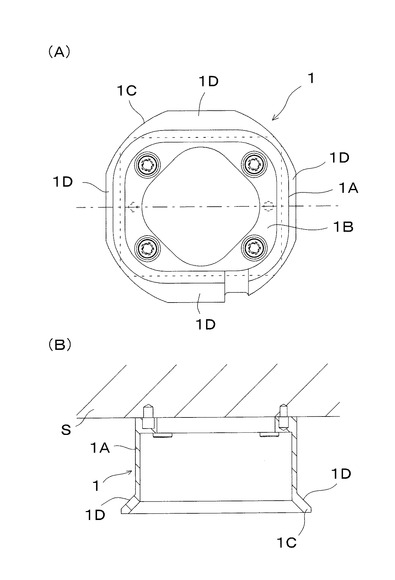
【図2】放出装置のアダプタを説明する正面図(A)及び断面図(B)である。
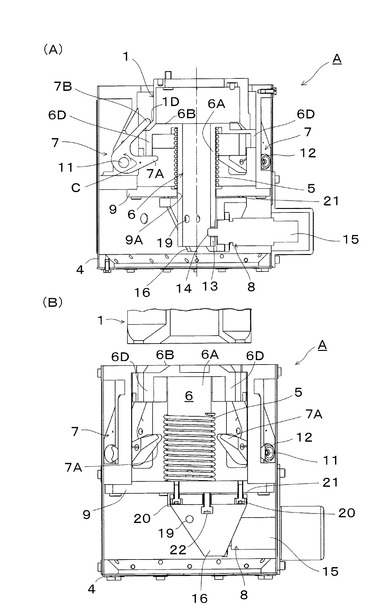
【図3】放出装置の拘束状態を示す断面図(A)及び解放状態を示す断面図(A)である。
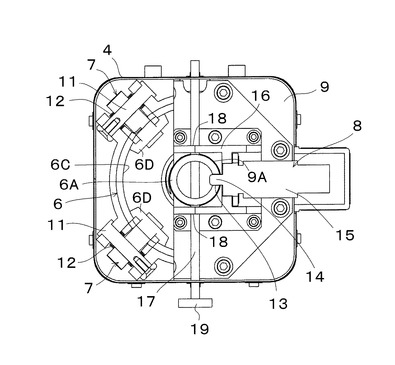
【図4】図3に示す放出装置の筐体をロック機構側から見た説明図である。
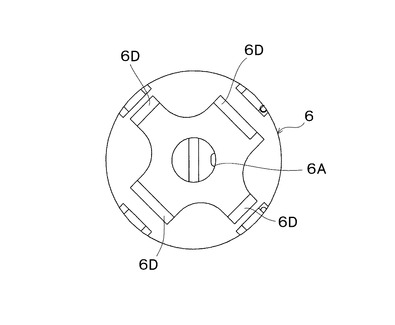
【図5】放出装置のプランジャを説明する正面図である。
【発明を実施するための形態】
【0010】
以下、図面に基づいて、本発明の人工衛星の放出装置の一実施形態を説明する。
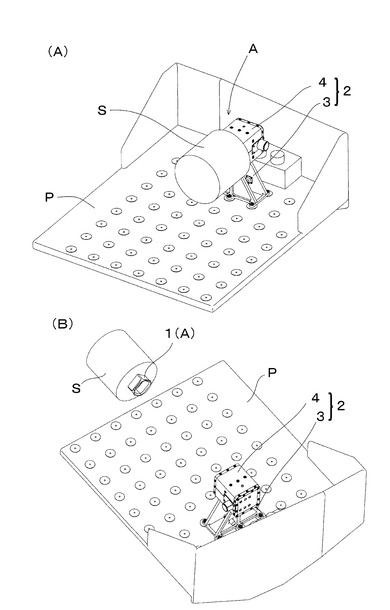
図1に示す放出装置Aは、放出される人工衛星Sに設けたアダプタ1と、人工衛星Sをアダプタ1の部分で保持する基台2を備えており、例えば、宇宙ステーション等の宇宙航行体のプラットフォームPに設置され、宇宙空間における軌道上で人工衛星Sを装着し、その人工衛星Sを放出する。
【0011】
アダプタ1は、図2に示すように角筒状の本体部1Aを有する部材であって、本体部1Aの先端に、人工衛星Sに接合する取付け面1Bを有すると共に、本体部1Aの基端に、角筒の外接円に相当するフランジ部1Cを有し、フランジ部1Cに、四方に向けた傾斜面1Dを有している。これらの傾斜面1Dは、後述するクランプによる把持部分となる。なお、上記のアダプタ1は、人工衛星Sと別体でも良いし、予め人工衛星に一体化されたものでも良い。
【0012】
基台2は、プラットフォームPに固定する脚部3と、この脚部3により支持した筐体4を備えている。筐体4は、少なくとも人工衛星Sの放出方向に開放してあり、この実施形態では、図1に示す如くプラットフォームPに対して平行な方向を放出方向としている。
【0013】
また、基台2は、図3に示すように、筐体4の内部に、弾性体5によって前進方向に付勢された衛星放出用のプランジャ6と、プランジャ6に当接したアダプタ1を把持・解放する四個のクランプ7と、弾性体5に抗して後退させたプランジャ6をその後退位置で拘束するロック機構8を備えている。ここで、人工衛星Sの放出方向が、プランジャ6の前進方向である。また、筐体4は、その内部に、人工衛星Sの放出・反放出方向(図3中で上下方向)の中間部を隔てる隔壁9を有し、この隔壁9には、プランジャ6の一部を挿通させる開口部9Aが形成してある。
【0014】
プランジャ6は、軸線部分に相当する内側スリーブ6Aと、内側スリーブ6Aの先端(図3中で上端)に設けたインターフェース部6Bと、インターフェース部6Bの外周に設けた外側スリーブ6Cとを同軸状に備えると共に、図5に示すように、外側スリーブ6Cよりも内側の位置に、後退方向(図3中で下方向)に突出する四個の拘束用突片6Dを備えている。四個の拘束用突片6Dは、90度間隔で配置されている。
【0015】
このプランジャ6は、内側スリーブ6Aを隔壁9の開口部9Aに挿通した状態にして、筐体4に移動可能に収容してあり、内側スリーブ6Aを中心にして隔壁9とインターフェース部6Bとの間に介装した弾性体(圧縮コイルばね)5により、前進方向に付勢されている。また、プランジャ6は、筐体4の開放端に設けた内向きフランジ4Aによって前進限が決定され、さらに、筐体4との間に嵌装したキー(図示せず)により軸回りの回転が阻止されて、軸方向のみに移動可能である。
【0016】
クランプ7は、隔壁9よりも放出側において、プランジャ6の四個の拘束用突片6Dに対応して90度間隔で配置してある。これらのクランプ7は、図3に示す如く概略L字形を成す部材であって、隔壁9側となる一方の片を受け部7A、他方の片を押圧部7Bとして、コーナー部分に貫通させた回動軸11により支持してあると共に、図4に示す如く回動軸11に装着した捩りコイルばね12により、図3中の矢印Cで示す前進回動方向に付勢され、同図中に仮想線で示す位置にある。このとき、クランプ7は、プランジャ6の拘束用突片6Dの後退移動軌跡上に受け部7Aが突出するように配置してあり、後述するように、人工衛星Sを拘束する際にプランジャ6と協働する。
【0017】
ロック機構8は、図3に示すように、隔壁9よりも反放出側において、プランジャ6に設けた拘束用孔13と、拘束用孔13に対して拘束用ピン14を係脱させるピン駆動部15を備えている。拘束用孔13は、プランジャ6の内側スリーブ6Aに形成してある。
【0018】
ピン駆動部15は、隔壁9に装着したブラケット16に固定してある。このピン駆動部15は、内部に充填したパラフィンの固形化と液状化の体積変化に応じて拘束用ピン14を移動させるピンプラーである。すなわち、ピン駆動部15(ピンプラー)は、拘束用ピン14と一体化したピストンや、拘束用ピン14が突出する方向にピストンを付勢する戻しばねなどを内蔵していると共に、ピストンにより隔離された圧力室にパラフィンが充填してあり、このほか、パラフィンの加熱手段などを備えている。
【0019】
上記のピン駆動部15は、拘束用ピン14を突出させて同ピン14を拘束用孔13に係合させた状態では、パラフィンが固形化している。そして、通電によりパラフィンを加熱して液状化させると、これに伴うパラフィンの体積膨張によりピストンが移動して拘束用ピン14を引き込む。これにより、拘束用孔13から拘束用ピン14が離脱する。また、ピン駆動部15は、パラフィンを冷却して固形化する際、ピストンが押し戻されて拘束用ピン14が突出状態に戻る。つまり、再使用することができる。
【0020】
また、放出装置Aは、プランジャ6の内側スリーブ6A及びブラケット16に、プランジャ6を後退限に移動させた際に互いに連通する通し孔1 7,18が設けてあり、これらの通し孔1 7,18に仮止めピン19を貫通させることで、ピン駆動部15をリセットする際に、プランジャ6を仮止めしておくことができる。
【0021】
さらに、放出装置Aは、隔壁9に対してブラケット16を複数の固定ボルト20で固定しており、この際、隔壁9とブラケット16との間に僅かな隙間21を設けると共に、ブラケット16に、隔壁9に先端部が当接する調整ボルト22が設けてある。これにより、ロック機構8による拘束後、調整ボルト22をねじ込むことで、ブラケット16を介してプランジャ6を隔壁9側に引き付け、拘束時における部材間のがたつきを阻止する。
【0022】
上記構成を備えた人工衛星Sの放出装置Aは、人工衛星Sに装着したアダプタ1をプランジャ6のインターフェース部6Bに当接させる。このとき、放出装置Aは、アダプタ1の四つの傾斜面1Dと、プランジャ6の四つの拘束用突片6Dとが対応する向きになっているのであるが、アダプタ1及びインターフェース部6Bには、軸回り方向の所定位相のみで互いに係合する凹凸等が設けてあり、これにより人工衛星Sの誤装着を未然に阻止し、人工衛星Sを正しい向きに装着することができる。
【0023】
次に、放出装置Aは、人工衛星Sを反放出方向に押し込むと、弾性体5を圧縮しながらプランジャ6が後退し、この後退過程において、図3中に仮想線で示す状態のクランプ7の受け部7Aに拘束用突片6Dが当接して、クランプ7を図3中の矢印C方向とは逆方向に後退回動させる。これにより、クランプ7の押圧部7Bがアダプタ1の傾斜面1Dに当接し、プランジャ6が後退限に達した時点で、同クランプ7によりプランジャ6との間でアダプタ1を把持する。
【0024】
また、上記の如くプランジャ6が後退眼に達した後は、プランジャ6及びブラケット16の通し孔17,18に仮止めピン19を貫通させてプランジャ6を仮止めする。そして、ピン駆動部15の拘束用ピン14をプランジャ6の拘束用孔13に係合させた後、仮止めピン19を取り外し、さらに、調整ボルト22を締めてプランジャ6を完全に拘束する。これにより、人工衛星Sは、図3(A)に示すように、基台2に確実に保持される。
【0025】
上記の人工衛星Sを放出する場合には、ピン駆動部15を作動させるだけで良い。すなわち、ピン駆動部(ピンプラー)15において、加熱手段によりパラフィンを液状化させると、パラフィンの体積膨張により拘束用ピン14が移動してプランジャ6の拘束用孔13から離脱し、プランジャ6の拘束が解除される。すると、今まで圧縮されていた弾性体5の反発力によりプランジャ6が前進し、この前進過程において、クランプ7が図3中の矢印C方向に前進回動してアダプタ1を解放する。そして、プランジャ6が筐体4の内向きフランジ4Aに当接する前進限に達するのと同時に、図3(B)に示すように、プランジャ6とアダプタ1が分離する。これにより、人工衛星Sは円滑に且つ速やかに放出される。
【0026】
このように、上記実施形態で説明した人工衛星Sの放出装置Aは、宇宙空間の軌道上であっても人工衛星Sを簡単にセットすることができると共に、構成部位の破壊を伴わないので繰り返し使用することが可能である。また、人工衛星Sに設けるアダプタ1を採用したので、放出する人工衛星の形状や大きさの制約が少なくなり、各種の人工衛星Sの放出に使用することができる。
【0027】
また、上記の放出装置Aは、クランプ7が、プランジャ6の移動方向に対して回動可能になっていて、プランジャ6の後退に伴って後退回動してアダプタ1を把持すると共に、プランジャ6の前進に伴って前進回動してアダプタ1を解放するものとなっている。これにより、放出装置Aは、簡単な装置構成でありながら、人工衛星Sのセットや保持をより一層容易に且つ確実に行うことができ、その後には、アダプタ1の円滑な解放動作と人工衛星Sの円滑な放出動作を連続的に行うことができる。
【0028】
さらに、放出装置Aは、プランジャ6の拘束用孔13と、拘束用孔13に対して拘束用ピン14を孫脱させるピン駆動部15を備えたロック機構8を採用したことから、簡単な構成により、プランジャ6及び人工衛星Sをより確実に保持すると共に、円滑に放出させるこどができる。また、ロック機構8におけるピン駆動部15としてパラフィンを内蔵したピンプラーを採用したことにより、例えば弾性体5の反発力が大きく、拘束用ピン14に作用する剪断応力が大きい場合でも、その力に抗する解除動作を円滑に且つ確実に行うことができる。
【0029】
本発明の人工衛星の放出装置は、その構成が上記実施形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲で構成の細部を適宜変更することが可能であり、例えば、各構成部材の形態やクランプ等の機能部の数などを変更することができ、また、ピン駆動部にはソレノイド式の手段などを使用することも可能である。
【符号の説明】
【0030】
A 放出装置
S 人工衛星
1 アダプタ
2 基台
5 弾性体
6 プランジャ
7 クランプ
8 ロック機構
13 拘束用孔(ロック機構)
14 拘束用ピン(ロック機構)
15 ピン駆動部(ロック機構:ピンプラー)
【技術分野】
【0001】
本発明は、宇宙空間において、宇宙ステーション等の宇宙航行体から人工衛星を放出するのに用いられる人工衛星の放出装置に関するものである。
【背景技術】
【0002】
従来、人工衛星を放出する装置としては、例えば、非特許文献1に記載されたようなものがあった。非特許文献1に記載の装置は、ロケット打ち上げ時において、主衛星に対して小型衛星(ピギーバック衛星)を保持し、主衛星の軌道上で小型衛星を分離するものであって、小型衛星の四隅の支柱から伸ばした足を分離機構側の爪で把持する構造になっている。分離機構は、ナイロン線で可動部を固縛することで小型衛星を機械的に把持した状態でラッチをかけ、小型衛星を分離する際には、ナイロン線を溶断することでばね力によりラッチを外し、押し出しばねにより小型衛星を放出するようになっている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】ISAS/JAXA2007 Space Utiliz Res,23(2007)、p.1 1 7−1 20、『超小型衛星用分離機構システムの落下棟無重力試験とM−Vロケットによる軌道上実証』
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記したような従来の人工衛星の放出装置は、主衛星に搭載した小型衛星を放出するものであるから、打ち上げ前に予め小型衛星をセットしておく必要があると共に、分離時にはナイロン線の溶断すなわち構成部位の破壊を伴うものとなっている。このため、従来の人工衛星の放出装置は、宇宙空間の軌道上での人工衛星のセットや再使用ができないうえに、放出する人工衛星の形状や大きさに制限があるという問題点があり、このような問題点を解決することが課題であった。
【0005】
本発明は、上記従来の課題に着目して成されたもので、宇宙空間の軌道上であっても人工衛星を簡単にセットすることができると共に、繰り返し使用することが可能であり、放出する人工衛星の形状や大きさの制約を少なくすることができる人工衛星の放出装置を提共することを目的としている。
【課題を解決するための手段】
【0006】
本発明の人工衛星の放出装置は、宇宙空間において宇宙航行体から人工衛星を放出する装置であって、放出される人工衛星に設けたアダプタと、人工衛星をアダプタの部分で保持する基台を福えると共に、基台に、弾性体によって前進方向に付勢された衛星放出用のプランジャと、プランジャに当接したアダプタを把持・解放するクランプと、弾性体に抗して後退させたプランジャをその後退位置で拘束するロック機構を備えた構成としており、上記構成をもって従来の課題を解決するための手段としている。
【0007】
また、本発明の人工衛星の放出装置は、より好ましい実施形態として、前記クランプが、プランジャの移動方向に対して回動可能であって、プランジャの後退に伴って後退回動しごアダプタを把持すると共に、プランジャの前進に伴って前進回動してアダプタを解放することを特徴としている。
【発明の効果】
【0008】
本発明の人工衛星の放出装置によれば、上記構成を採用したことにより、宇宙空間の軌道上であっても人工衛星を簡単にセットすることができると共に、構成部位の破壊を伴わないので繰り返し使用することが可能であり、放出する人工衛星の形状や大きさの制約を少なくすることができる。
【図面の簡単な説明】
【0009】
【図1】本発明に係る人工衛星の放出装置の一実施形態において、拘束状態を示す斜視図(A)及び解放状態を示す斜視図(B)である。
【図2】放出装置のアダプタを説明する正面図(A)及び断面図(B)である。
【図3】放出装置の拘束状態を示す断面図(A)及び解放状態を示す断面図(A)である。
【図4】図3に示す放出装置の筐体をロック機構側から見た説明図である。
【図5】放出装置のプランジャを説明する正面図である。
【発明を実施するための形態】
【0010】
以下、図面に基づいて、本発明の人工衛星の放出装置の一実施形態を説明する。
図1に示す放出装置Aは、放出される人工衛星Sに設けたアダプタ1と、人工衛星Sをアダプタ1の部分で保持する基台2を備えており、例えば、宇宙ステーション等の宇宙航行体のプラットフォームPに設置され、宇宙空間における軌道上で人工衛星Sを装着し、その人工衛星Sを放出する。
【0011】
アダプタ1は、図2に示すように角筒状の本体部1Aを有する部材であって、本体部1Aの先端に、人工衛星Sに接合する取付け面1Bを有すると共に、本体部1Aの基端に、角筒の外接円に相当するフランジ部1Cを有し、フランジ部1Cに、四方に向けた傾斜面1Dを有している。これらの傾斜面1Dは、後述するクランプによる把持部分となる。なお、上記のアダプタ1は、人工衛星Sと別体でも良いし、予め人工衛星に一体化されたものでも良い。
【0012】
基台2は、プラットフォームPに固定する脚部3と、この脚部3により支持した筐体4を備えている。筐体4は、少なくとも人工衛星Sの放出方向に開放してあり、この実施形態では、図1に示す如くプラットフォームPに対して平行な方向を放出方向としている。
【0013】
また、基台2は、図3に示すように、筐体4の内部に、弾性体5によって前進方向に付勢された衛星放出用のプランジャ6と、プランジャ6に当接したアダプタ1を把持・解放する四個のクランプ7と、弾性体5に抗して後退させたプランジャ6をその後退位置で拘束するロック機構8を備えている。ここで、人工衛星Sの放出方向が、プランジャ6の前進方向である。また、筐体4は、その内部に、人工衛星Sの放出・反放出方向(図3中で上下方向)の中間部を隔てる隔壁9を有し、この隔壁9には、プランジャ6の一部を挿通させる開口部9Aが形成してある。
【0014】
プランジャ6は、軸線部分に相当する内側スリーブ6Aと、内側スリーブ6Aの先端(図3中で上端)に設けたインターフェース部6Bと、インターフェース部6Bの外周に設けた外側スリーブ6Cとを同軸状に備えると共に、図5に示すように、外側スリーブ6Cよりも内側の位置に、後退方向(図3中で下方向)に突出する四個の拘束用突片6Dを備えている。四個の拘束用突片6Dは、90度間隔で配置されている。
【0015】
このプランジャ6は、内側スリーブ6Aを隔壁9の開口部9Aに挿通した状態にして、筐体4に移動可能に収容してあり、内側スリーブ6Aを中心にして隔壁9とインターフェース部6Bとの間に介装した弾性体(圧縮コイルばね)5により、前進方向に付勢されている。また、プランジャ6は、筐体4の開放端に設けた内向きフランジ4Aによって前進限が決定され、さらに、筐体4との間に嵌装したキー(図示せず)により軸回りの回転が阻止されて、軸方向のみに移動可能である。
【0016】
クランプ7は、隔壁9よりも放出側において、プランジャ6の四個の拘束用突片6Dに対応して90度間隔で配置してある。これらのクランプ7は、図3に示す如く概略L字形を成す部材であって、隔壁9側となる一方の片を受け部7A、他方の片を押圧部7Bとして、コーナー部分に貫通させた回動軸11により支持してあると共に、図4に示す如く回動軸11に装着した捩りコイルばね12により、図3中の矢印Cで示す前進回動方向に付勢され、同図中に仮想線で示す位置にある。このとき、クランプ7は、プランジャ6の拘束用突片6Dの後退移動軌跡上に受け部7Aが突出するように配置してあり、後述するように、人工衛星Sを拘束する際にプランジャ6と協働する。
【0017】
ロック機構8は、図3に示すように、隔壁9よりも反放出側において、プランジャ6に設けた拘束用孔13と、拘束用孔13に対して拘束用ピン14を係脱させるピン駆動部15を備えている。拘束用孔13は、プランジャ6の内側スリーブ6Aに形成してある。
【0018】
ピン駆動部15は、隔壁9に装着したブラケット16に固定してある。このピン駆動部15は、内部に充填したパラフィンの固形化と液状化の体積変化に応じて拘束用ピン14を移動させるピンプラーである。すなわち、ピン駆動部15(ピンプラー)は、拘束用ピン14と一体化したピストンや、拘束用ピン14が突出する方向にピストンを付勢する戻しばねなどを内蔵していると共に、ピストンにより隔離された圧力室にパラフィンが充填してあり、このほか、パラフィンの加熱手段などを備えている。
【0019】
上記のピン駆動部15は、拘束用ピン14を突出させて同ピン14を拘束用孔13に係合させた状態では、パラフィンが固形化している。そして、通電によりパラフィンを加熱して液状化させると、これに伴うパラフィンの体積膨張によりピストンが移動して拘束用ピン14を引き込む。これにより、拘束用孔13から拘束用ピン14が離脱する。また、ピン駆動部15は、パラフィンを冷却して固形化する際、ピストンが押し戻されて拘束用ピン14が突出状態に戻る。つまり、再使用することができる。
【0020】
また、放出装置Aは、プランジャ6の内側スリーブ6A及びブラケット16に、プランジャ6を後退限に移動させた際に互いに連通する通し孔1 7,18が設けてあり、これらの通し孔1 7,18に仮止めピン19を貫通させることで、ピン駆動部15をリセットする際に、プランジャ6を仮止めしておくことができる。
【0021】
さらに、放出装置Aは、隔壁9に対してブラケット16を複数の固定ボルト20で固定しており、この際、隔壁9とブラケット16との間に僅かな隙間21を設けると共に、ブラケット16に、隔壁9に先端部が当接する調整ボルト22が設けてある。これにより、ロック機構8による拘束後、調整ボルト22をねじ込むことで、ブラケット16を介してプランジャ6を隔壁9側に引き付け、拘束時における部材間のがたつきを阻止する。
【0022】
上記構成を備えた人工衛星Sの放出装置Aは、人工衛星Sに装着したアダプタ1をプランジャ6のインターフェース部6Bに当接させる。このとき、放出装置Aは、アダプタ1の四つの傾斜面1Dと、プランジャ6の四つの拘束用突片6Dとが対応する向きになっているのであるが、アダプタ1及びインターフェース部6Bには、軸回り方向の所定位相のみで互いに係合する凹凸等が設けてあり、これにより人工衛星Sの誤装着を未然に阻止し、人工衛星Sを正しい向きに装着することができる。
【0023】
次に、放出装置Aは、人工衛星Sを反放出方向に押し込むと、弾性体5を圧縮しながらプランジャ6が後退し、この後退過程において、図3中に仮想線で示す状態のクランプ7の受け部7Aに拘束用突片6Dが当接して、クランプ7を図3中の矢印C方向とは逆方向に後退回動させる。これにより、クランプ7の押圧部7Bがアダプタ1の傾斜面1Dに当接し、プランジャ6が後退限に達した時点で、同クランプ7によりプランジャ6との間でアダプタ1を把持する。
【0024】
また、上記の如くプランジャ6が後退眼に達した後は、プランジャ6及びブラケット16の通し孔17,18に仮止めピン19を貫通させてプランジャ6を仮止めする。そして、ピン駆動部15の拘束用ピン14をプランジャ6の拘束用孔13に係合させた後、仮止めピン19を取り外し、さらに、調整ボルト22を締めてプランジャ6を完全に拘束する。これにより、人工衛星Sは、図3(A)に示すように、基台2に確実に保持される。
【0025】
上記の人工衛星Sを放出する場合には、ピン駆動部15を作動させるだけで良い。すなわち、ピン駆動部(ピンプラー)15において、加熱手段によりパラフィンを液状化させると、パラフィンの体積膨張により拘束用ピン14が移動してプランジャ6の拘束用孔13から離脱し、プランジャ6の拘束が解除される。すると、今まで圧縮されていた弾性体5の反発力によりプランジャ6が前進し、この前進過程において、クランプ7が図3中の矢印C方向に前進回動してアダプタ1を解放する。そして、プランジャ6が筐体4の内向きフランジ4Aに当接する前進限に達するのと同時に、図3(B)に示すように、プランジャ6とアダプタ1が分離する。これにより、人工衛星Sは円滑に且つ速やかに放出される。
【0026】
このように、上記実施形態で説明した人工衛星Sの放出装置Aは、宇宙空間の軌道上であっても人工衛星Sを簡単にセットすることができると共に、構成部位の破壊を伴わないので繰り返し使用することが可能である。また、人工衛星Sに設けるアダプタ1を採用したので、放出する人工衛星の形状や大きさの制約が少なくなり、各種の人工衛星Sの放出に使用することができる。
【0027】
また、上記の放出装置Aは、クランプ7が、プランジャ6の移動方向に対して回動可能になっていて、プランジャ6の後退に伴って後退回動してアダプタ1を把持すると共に、プランジャ6の前進に伴って前進回動してアダプタ1を解放するものとなっている。これにより、放出装置Aは、簡単な装置構成でありながら、人工衛星Sのセットや保持をより一層容易に且つ確実に行うことができ、その後には、アダプタ1の円滑な解放動作と人工衛星Sの円滑な放出動作を連続的に行うことができる。
【0028】
さらに、放出装置Aは、プランジャ6の拘束用孔13と、拘束用孔13に対して拘束用ピン14を孫脱させるピン駆動部15を備えたロック機構8を採用したことから、簡単な構成により、プランジャ6及び人工衛星Sをより確実に保持すると共に、円滑に放出させるこどができる。また、ロック機構8におけるピン駆動部15としてパラフィンを内蔵したピンプラーを採用したことにより、例えば弾性体5の反発力が大きく、拘束用ピン14に作用する剪断応力が大きい場合でも、その力に抗する解除動作を円滑に且つ確実に行うことができる。
【0029】
本発明の人工衛星の放出装置は、その構成が上記実施形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲で構成の細部を適宜変更することが可能であり、例えば、各構成部材の形態やクランプ等の機能部の数などを変更することができ、また、ピン駆動部にはソレノイド式の手段などを使用することも可能である。
【符号の説明】
【0030】
A 放出装置
S 人工衛星
1 アダプタ
2 基台
5 弾性体
6 プランジャ
7 クランプ
8 ロック機構
13 拘束用孔(ロック機構)
14 拘束用ピン(ロック機構)
15 ピン駆動部(ロック機構:ピンプラー)
【特許請求の範囲】
【請求項1】
宇宙空間において宇宙航行体から人工衛星を放出する装置であって、
放出される人工衛星に設けたアダプタと、人工衛星をアダプタの部分で保持する基台を備えると共に、
基台に、弾性体によって前進方向に付勢された衛星放出用のプランジャと、
プランジャに当接したアダプタを把持・解放するクランプと、
弾性体に抗して後退させたプランジャをその後退位置で拘束するロック機構を備えたことを特徴とする人工衛星の放出装置。
【請求項2】
クランプが、プランジャの移動方向に対して回動可能であって、プランジャの後退に伴って後退回動してアダプタを把持すると共に、プランジャの前進に伴って前進回動してアダプタを解放することを特徴とする請求項1に記載の人工衛星の放出装置。
【請求項3】
ロック機構が、プランジャに設けた拘束用孔と、拘束用孔に対して拘束用ピンを係脱させるピン駆動部を備えていることを特徴とする請求項1又は2に記載の人工衛星の放出装置。
【請求項4】
ロック機構におけるピン駆動部が、内部に充填したパラフィンの固形化と液状化の体積変化に応じて拘束用ピンを移動させるピンプラーであることを特徴とする請求項3に記載の人工衛星の放出装置。
【請求項1】
宇宙空間において宇宙航行体から人工衛星を放出する装置であって、
放出される人工衛星に設けたアダプタと、人工衛星をアダプタの部分で保持する基台を備えると共に、
基台に、弾性体によって前進方向に付勢された衛星放出用のプランジャと、
プランジャに当接したアダプタを把持・解放するクランプと、
弾性体に抗して後退させたプランジャをその後退位置で拘束するロック機構を備えたことを特徴とする人工衛星の放出装置。
【請求項2】
クランプが、プランジャの移動方向に対して回動可能であって、プランジャの後退に伴って後退回動してアダプタを把持すると共に、プランジャの前進に伴って前進回動してアダプタを解放することを特徴とする請求項1に記載の人工衛星の放出装置。
【請求項3】
ロック機構が、プランジャに設けた拘束用孔と、拘束用孔に対して拘束用ピンを係脱させるピン駆動部を備えていることを特徴とする請求項1又は2に記載の人工衛星の放出装置。
【請求項4】
ロック機構におけるピン駆動部が、内部に充填したパラフィンの固形化と液状化の体積変化に応じて拘束用ピンを移動させるピンプラーであることを特徴とする請求項3に記載の人工衛星の放出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−245908(P2012−245908A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−119930(P2011−119930)
【出願日】平成23年5月30日(2011.5.30)
【出願人】(500302552)株式会社IHIエアロスペース (298)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月30日(2011.5.30)
【出願人】(500302552)株式会社IHIエアロスペース (298)
[ Back to top ]