
人工装具を脊髄分節に結合するための方法および装置
患者の脊髄分節に人工装具を結合するための方法は、脊髄分節に沿って配置される、第1および第2の基準点を選択するステップと、標的距離を手術前に測定するステップとを含む。標的距離は、患者が起立位置等の好ましい姿勢である間に第1の基準点と第2の基準点との間に延在する。人工装具は、脊髄分節に結合され、次いで、人工装具は、標的距離に基づいて、第1の基準点と第2の基準点との距離を設定するために、手術中に調節される。

【発明の詳細な説明】
【技術分野】
【0001】
(1.発明の分野)
本発明は、概して、医療方法および装置に関する。より具体的には、本発明は、整形外科的な内部固定手術中に人工装具を脊髄分節に結合し、人工装具を調節するために使用される方法および装置に関する。これは、背部痛または他の脊髄症状を有する患者の治療を含むが、それに限定されない。
【0002】
慢性背下部痛の主な原因は、椎間板内破裂としても称される、椎間板起因の疼痛である。椎間板起因の疼痛を罹患する患者は、若年であるか、さもなければ、背部に局限した疼痛を呈する健康な個人である傾向がある。椎間板起因の疼痛は、通常、脊椎のL4−L5またはL5−S1の接合部に位置する椎間板で生じる。疼痛は、患者が腰椎を曲げさせた時に(すなわち、座位または前屈によって)悪化し、腰椎を伸展させた時に(すなわち、立位または後屈によって)緩和する傾向がある。曲げおよび伸展は、腰部の機械的荷重パターンを変更することで公知である。腰部が伸展状態にある時に、腰部によって負担される軸荷重は、椎間板および面関節によって共有される(荷重の約30%は、面関節によって負担される)。曲げにおいては、分節荷重は、椎間板によってほぼ完全に負担される。さらに、核は、後方に移動し、輪(神経支配されている)の後方部分上の荷重を変化させ、その線維が引張力およびせん断力を受ける可能性が高い。次いで、分節曲げは、椎間板によって負担される両方の荷重を増大させ、それらは、より疼痛を伴う方法で負担させられる。椎間板起因の疼痛は、比較的機能障害になる可能性があり、一部の患者では、労働および生活を満喫する能力に影響を及ぼす可能性がある。
【0003】
椎間板起因の背下部痛を罹患する患者が経験する疼痛は、曲げ不安定性と考えることができ、他の疾患で認められる曲げ不安定性に関連する。これらの最も一般的なものは、異常分節の並進が分節の曲げによって悪化する、脊髄症状の脊椎すべり症である。本明細書に説明する方法およびデバイスはまた、それ自体、これらの他の脊髄障害または分節の曲げに関連する治療のために有用でなければならず、そのためには、脊髄分節の曲げの予防または制御が望ましい。本明細書に説明する方法およびデバイスが使用され得る別の用途は、運動を制限し、治癒を促進し、術後の疼痛を緩和するために、脊椎固定術と併せることである。あるいは、説明する方法およびデバイスはまた、圧迫骨折セメント固定、椎間板全置換、核増生、および環修補を含む、脊椎前柱の他の治療と併せて有用でなければならない。
【0004】
椎間板起因の疼痛を罹患する患者は、疼痛を伴う部分を曲げさせる座位等の位置を回避し、痛みを伴う部分を伸展状態に維持する立位等の位置を好むことによってそれらの症候群を調節する。椎間板起因の疼痛を軽減するための1つのアプローチは、しばしば、会社の椅子に取り付けられている腰支持枕の使用に関与する。生物力学的に、偏在する腰支持枕の目的とした効果はまた、疼痛を伴う腰セグメントを疼痛の少ない伸展位置に維持することである。
【0005】
慢性椎間板起因の疼痛と診断された患者のための現在の治療における代替案は、かなり制限されている。多くの患者は、理学療法、マッサージ、抗炎症および鎮痛剤投薬、筋肉弛緩剤、および硬膜外ステロイド注射等のその後の治療コースを受けるが、典型的には、有意な程度の疼痛に悩まされ続ける。他の患者は、通常、隣接椎骨の癒着と共に椎間板切除(椎間板の除去)を必要とする、脊椎固定術を受けることを選択する。癒着はまた、例えば、茎ネジおよび固定ロッドを含む、罹患した脊髄分節の計装を含み得る、または含み得ない。癒着は、それが不可逆的であり、費用がかかり、高い罹患率を伴い、不確かな有効性を有するため、椎間板起因の疼痛に安易に推奨されていない。しかしながら、その短所にも関わらず、椎間板起因の疼痛のための脊椎固定術は、実行可能な代替案がないため、依然として一般的である。
【0006】
実践において一般的に使用されていないが、米国食品医薬品局(FDA)によって使用が認可されている代替的方法は、棘突起または他の椎骨要素を包囲し、それによって、運動に対する拘束を形成する、骨セルクラージュデバイスの適用である。医師は、典型的には、生体構造上に一定の高い力を印加し、1つの位置に分節を固定し、効果的に運動を不可能にさせる、引張または伸長をデバイスに印加する。そのようなデバイスの適用後に可能になった運動の欠如は、同時に実施される癒着の可能性を改善するために有用であると考えられ、癒着が行われない場合には、これらのデバイスは、デバイス、またはデバイスが取り付けられる棘突起の破損により機能しなくなる。これらのデバイスは、備え付け用途のために設計され、可動域にわたる曲げへの動的弾性抵抗を可能にするために設計されるものではない。上述の骨セルクラージュデバイスおよび他の技術の目的は、対象の椎骨分節の測定可能な運動をほぼ完全に制限することである。所与の分節におけるこの運動の喪失は、最終的に隣接分節の罹患率につながる可能性のある、隣接分節における異常な荷重および運動を引き起こす。
【0007】
セルクレージュデバイスに付随する問題のいくつかを回避する代替的解決策は、テザー構造等の脊髄分節に結合される弾性構造の使用に関する。弾性構造は、しばしば、実質的に制限されていない脊髄の伸展を可能にしながら、曲げに対する消極的抵抗を増大することによって、疼痛を緩和することができる。これは、患者が緩和を提供するために既に使用する、姿勢適応の機械的影響を模倣する。
【0008】
テザー構造を使用する脊髄インプラントは、現在、商業的に入手可能である。そのようなインプラントの1つは、それらの茎を介して隣接椎骨を結合する。このインプラントには、スペーサ、テザーおよび茎ネジが挙げられる。インプラントを設置するために、椎間板および椎骨の選択した部分は、除去される。次いで、インプラントは、脊椎の各側面の2つの隣接茎を結合するために配置される。茎ネジは、インプラントを適所に固定する。テザーは、止めネジを用いて茎ネジに締め付けられ、対象の椎骨の伸展/曲げ動作を制限する。有意な組織が除去されるため、かつネジが茎内に配置されるため、インプラントおよび付随する外科方法は、侵襲性が高く、インプラントは、しばしば、不可逆的に埋め込まれる。付随する重要な神経根損傷の機会も存在する。また、止めネジの先端は、テザーを締め付け、これは、微粒子の摩耗粉の生成のテザーの他に摩滅を引き起こし得る。
【0009】
テザー構造を使用する他のインプラントは、代わりにそれらの突起を介して隣接椎骨を結合する。これらのインプラントには、テザーおよびスペーサが挙げられる。インプラントを設置するために、棘状靭帯は、一時的に持ち上げられ、置き換えられる。次いで、対象の2つの隣接椎骨の間の棘間靭帯は、永久的に除去され、スペーサは、棘間の隙間に挿入される。次いで、テザーは、隣接棘間靭帯を介して2つの隣接椎骨の突起の周に巻き付けられ、次いで、スペーサによって、またはスペーサに締結された個別の構成要素によって、機械的に適所に固定される。次いで、棘状靭帯は、その本来の位置に再度戻される。そのようなインプラントおよび付随する外科的方法は、不都合が存在しないわけではない。これらのインプラントは、棘突起を日々の活動中の頻繁な高荷重にさらし、しばしば、棘突起の破損または低下を引き起こし得る。さらに、スペーサは、患者を、矢状面バランスの欠如に付随する長期の臨床問題に潜在的につながる分節脊柱後弯症にさせ得る。テザーを固定するプロセスは、しばしば、外科医が実施するには非常に複雑な手順であり、外科手術をより侵襲性にさせる。また、前述のように、棘間靭帯の除去は、永久的である。そのため、デバイスの適用は可逆的ではない。
【0010】
ごく近年では、侵襲性の少ない脊髄インプラントが導入されている。前述のインプラントのように、これらの脊髄インプラントは、1対以上の棘突起の上に配置され、湾曲中に生じる棘突起の広がりに対する弾性拘束を提供する。しかしながら、伸展を制限するスペーサは、使用されず、棘間靭帯は、永久的に除去されない。そのため、これらのインプラントは、侵襲性が少なく、可逆的に埋め込まれ得る。インプラントは、典型的には、テザー構造およびテザーのための固定機構を含む。テザーは、ポリエステル(PET)またはポリエチレン(例えば、超高分子量のポリエチレン、UHMWPE)織物等の可撓性ポリマー布地、マルチストランドケーブル、または他の可撓性構造から作製され得る。テザーは、隣接椎骨の突起の周りに巻きつけられ、次いで、固定機構によって固定される。固定機構は、テザーおよびストラップの指標付けに関与し得、例えば、テザーおよび固定機構は、その2つを連結する、歯、フック、ループ等の不連続界面を含む。また、非常に強力な圧着を使用して、固定機構を用いてテザーを押圧し、連結し得る。多くの公知の埋込は、止めネジの先端、または締結部のネジ山部分を用いてテザーを圧着する。しかしながら、脊髄インプラントに印加された機械力は、相互にインターフェースする、テザーおよび固定機構の特定の部分に向かって非均一に分配される。したがって、これらの部分は、典型的には、摩滅、摩耗、または他の損傷をより受けやすく、したがって、これらの脊髄インプラント全体の信頼性を低下させる。他の公知の方法は、他の構成要素を共に引き出し、圧着力を生成するためにネジまたはボルトを使用する。他の係止方法は、摩擦嵌合の使用を含み、下記により詳細に開示する。これらの方法は、潜在的に損傷させる荷重を回避し得る一方で、アセンブリの機械的複雑性は、さらに付属部品を導入することによって増大し得る。
【0011】
上述の多くの棘突起拘束デバイスの適切な埋込への鍵は、棘突起の周りに巻かれている時に、デバイスの引張または寸法を調節することである。バンドが適切に調節されていない場合には、それは、緩過ぎる可能性があり、したがって、生体構造から係脱し得る、または曲げへの適切な抵抗を提供せず、それによって、疼痛または不安定性の緩和の失敗をもたらし得る。一方、バンドがきつ過ぎる、または小さ過ぎる場合には、デバイスは、曲げへの過剰な抵抗を提供し得、脊髄分節の曲げ能力を不必要に制限し、椎骨または軟組織の部分に対して必要以上の荷重を生じ得る。したがって、棘突起デバイスの寸法/引張力を適切に調節することは必須である。デバイスは、理想的には、患者が好ましい姿勢(例えば、起立位置)にある間に規定および好ましい構造を有さなければならず、デバイスはまた、依然として脊髄分節の有意に制限されない伸展を可能にしながら、脊髄分節の曲げに抵抗する力を提供しなければならない。前述の理由のため、脊髄分節に人工装具を結合し、特に整形外科的内固定手術中に人工装具を調節するための改善された方法および装置を提供することが望ましいであろう。特に、そのような方法および装置は、実行するために容易であり、最小侵襲性でなければならない。
【背景技術】
【0012】
(2.背景技術の記述)
対象の特許および発行された明細書には、米国特許第3,648,691号、同第4,643,178号、同第4,743,260号、同第4,966,600号、同第5,011,494号、同第5,092,866号、同第5,116,340号、同第5,180,393号、同第5,282,863号、同第5,395,374号、同第5,415,658号、同第5,415,661号、同第5,449,361号、同第5,456,722号、同第5,462,542号、同第5,496,318号、同第5,540,698号、同第5,562,737号、同第5,609,634号、同第5,628,756号、同第5,645,599号、同第5,725,582号、同第5,902,305号、同第36,221号、同第5,928,232号、同第5,935,133号、同第5,964,769号、同第5,989,256号、同第6,053,921号、同第6,248,106号、同第6,312,431号、同第6,364,883号、同第6,378,289号、同第6,391,030号、同第6,468,309号、同第6,436,099号、同第6,451,019号、同第6,582,433号、同第6,605,091号、同第6,626,944号、同第6,629,975号、同第6,652,527号、同第6,652,585号、同第6,656,185号、同第6,669,729号、同第6,682,533号、同第6,689,140号、同第6,712,819号、同第6,689,168号、同第6,695,852号、同第6,716,245号、同第6,761,720号、同第6,835,205号、同第7,029,475号、同第7,163,558号、米国特許出願公開第2002/0151978号、同第2004/0024458号、同第2004/0106995号、同第2004/0116927号、同第2004/0117017号、同第2004/0127989号、同第2004/0172132号、同第2004/0243239号、同第2005/0033435号、同第2005/0049708号、同第2005/0192581号、同第2005/0216017号、同第2006/0069447号、同第2006/0136060号、同第2006/0240533号、同第2007/0213829号、同第2007/0233096号、同第2008/0009866号、同第2008/0108993、PCT国際公開WO01/28442 A1号、同WO02/03882 A2号、同WO02/051326 A1号、同WO02/071960 A1号、同WO03/045262 A1号、同WO2004/052246 A1号、同WO2004/073532 A1号、同WO2008/051806号、同WO2008/051423号、同WO2008/051801号、同WO2008/051802、および外国特許出願公開第EP0322334 A1号、および第FR2 681 525 A1号が挙げられる。脊髄分節に適用された可撓性拘束の機械的特性は、Papp et al.(1997)Spine 22:151〜155、Dickman et al.(1997)Spine 22:596〜604、およびGarner et al(2002)Eur.Spine J.S186〜S191、A1 Baz et al(1995)Spine 20,No.11,1241〜1244、Heller,(1997)Arch.Orthopedic and Trauma Surgery,117,No.1〜2:96〜99、Leahy et al.(2000)Proc.Inst.Mech.Eng.Part H:J.Eng.Med.214,No.5:489〜495、Minns et al.,(1997)Spine 22 No.16:1819〜1825、Miyasaka et al.(2000)Spine 25,No.6:732〜737、Shepherd et al.(2000)Spine 25,No.3:319〜323、Shepherd(2001)Medical Eng.Phys.23,No.2:135〜141、ならびにVoydeville et al(1992)Orthop Traumatol 2:259〜264に説明されている。
【発明の概要】
【課題を解決するための手段】
【0013】
本発明は、人工装具を脊髄分節に結合し、整形外科適内固定手術中に人工装具を調節するために使用される方法および装置に関する。これには、脊髄疼痛または他の脊髄症状を有する患者の治療が挙げられるが、それに限定されない。
【0014】
本発明の第1の側面においては、患者の脊髄分節に人工装具を結合するための方法は、脊髄分節に沿って配置される第1および第2の基準点を選択するステップと、手術前に標的距離を測定するステップとを含む。標的距離は、患者が好ましい姿勢である間に、第1の基準点と第2の基準点との間に延在する。本方法はまた、脊髄分節に人工装具を結合するステップと、標的距離に基づき、第1の基準点と第2の基準点との間の距離を設定するために、手術中に人工装具を調節するステップとを含む。
【0015】
第1の基準点は、第1の椎骨上に配置され得、第2の基準点は、椎骨または仙骨の上に配置され得る。第1の基準点はまた、第1の椎骨の第1の棘突起の上面上に配置され得、第2の基準点は、第2の椎骨の第2の棘突起の下面上に配置され得る。第1の基準点はまた、第1の椎骨の第1の棘突起の下面上に配置され得、第2の基準点は、第2の椎骨の第2の棘突起の上面上に配置され得る。第1の椎骨は、第2の椎骨の頭方に配置され得る。好ましい姿勢は、起立位置または痛みを伴わない位置を含み得る。
【0016】
標的距離を測定するステップは、患者が好ましい姿勢である間に撮影された、患者の放射線写真を観察するステップを含み得る。放射線写真は、手術前に撮影され得、脊髄分節の側面図を含み得る。人工装具は、テザー構造を含み得、結合するステップは、テザーの第1の部分を上棘突起と係合するステップと、テザー構造の第2の部分を内棘突起または仙骨と係合するステップとを含み得る。
【0017】
調節するステップは、患者が好ましい姿勢である時に、人工装具が中立位置にあり、人工装具が、依然として、脊髄分節の有意に制限されていない伸展を可能にしながら、脊髄分節の曲げに抵抗する力を提供するように、人工装具を調節するステップを含み得る。調節するステップはまた、患者が好ましい姿勢以外の位置である間に、人工装具を調節するステップ、または人工装具上の較正マーキングを観察するステップを含み得る。調節するステップはまた、第1の基準点と第2の基準点との間の距離を標的距離に設定するステップを含み得る。
【0018】
本方法は、第1の基準点と第2の基準点との間の距離が標的距離に実質的に一致することを確認するステップをさらに含み得る。確認するステップは、第1の基準点と第2の基準点との間の距離を決定するためにゲージを使用するステップを含み得る。本方法はまた、第1の基準点と第2の基準点との間の距離が標的距離に実質的に一致するまで、人工装具を再調節するステップをさらに含み得る。
【0019】
人工装具は、第1のコンプライアンス要素(compliance element)を備え、本方法は、人工装具の調節中に、その伸展または収縮を制限するために、第1の拘束装置を第1のコンプライアンス要素と係合し、係止するステップをさらに含み得る。第1の拘束装置は、その移動を可能にするように、第1のコンプライアンス要素から係脱され得る。人工装具はまた、第2のコンプライアンス要素を備え得、本方法は、人工装具の調節中に、その伸展または収縮を制限するために、第2の拘束装置を第2のコンプライアンス要素と係合するステップを含み得る。第1および第2の拘束装置は、脊髄分節の正中線の対向側の第1および第2のコンプライアンス要素の整列および位置付けを容易にするように結合され得る。第1の拘束装置は、様々な厚さの棘突起または正中線靭帯(例えば、棘間靭帯および棘上靭帯)に適応するために、1つの自由度に沿って第2の拘束装置に対して移動させられ得る。ドライバまたはツールは、第1または第2の拘束装置の中心管腔内に位置付けられ、それによって、コンプライアンス要素上の係止機構を用いてドライバまたはツールを同心円状に整列させ得る。拘束装置を使用して、第1または第2のコンプライアンス要素が調節される時、または第1または第2の拘束装置が共に解放可能に係止される時に、反対トルクを提供し得る。人工装具は、所望の値までプレテンションを加えられ得る。
【0020】
標的距離は、長軸長を画定し、調節するステップは、標的人工装具円周を決定するために標的距離を使用するステップと、標的円周に人工装具を調節するステップとを含む。長軸長は、参照テーブル内の標的円周または人工装具上の較正マーキングと相関し得る。
【0021】
本方法はまた、人工装具円周が標的円周に実質的に一致することを確認するステップを含み得る。人工装具円周を確認するステップは、人工装具上の較正マーキングを観察するステップを含み得る。人工装具は、人工装具円周が標的円周に実質的に一致するまで再調節され得る。
【0022】
本方法はまた、脊髄分節に沿って配置される、第3および第4の基準点を選択するステップを含み得る。第3および第4の基準点の間の距離は、短軸長を有する短軸を画定し、短軸は、長軸に対して直角である。本方法はまた、標的人工装具円周を決定するために、手術前画像上の短軸長を測定するステップを含み得る。標的円周は、人工装具において、上棘突起および下棘突起を包囲するループを形成するために十分である。人工装具は、所望の姿勢を超えた曲げに抵抗する力を提供し得る。第3および第4の基準点は、棘突起についての対向側にあり得、棘突起幅に適応する必要がある、人工装具の長さを推定し得る。第3および第4の基準点は、単一の椎骨上に配置され得る。短軸長は、参照テーブル内の標的円周と相関し得るか、または短軸長は、人工装具上の較正マーキングと相関し得る。本方法はさらに、脊髄分節の一部分を減圧するステップを含み得る。
【0023】
本発明の別の側面においては、患者の脊髄分節の曲げを制限するためのシステムは、上棘突起、および下棘突起または仙骨と結合されるように適合される、テザー構造と、テザー構造と結合される、第1のコンプライアンス要素とを備える。本システムはまた、コンプライアンス要素を所望の位置に保持するように、またはコンプライアンス要素の運動を規定の範囲に制限するように、コンプライアンス要素と解放可能に結合される、第1の拘束ツールを含む。テザー構造は、実質的に非伸張性であり得、第1の拘束ツールは、細長いシャフトを備え得る。第1の拘束ツールは、第1のコンプライアンス要素を解放可能に保持するように適合される、クレードルを備え得る。第1の拘束ツールはまた、第1のコンプライアンス要素を解放可能に保持するためのレセプタクルを形成し、コンプライアンス要素の伸長を拘束する、複数の細長いアームを備え得る。第1のツールは、第1のコンプライアンス要素を所望の緊張状態に保持し得る。圧縮力は、可変であり得る。
【0024】
第1の拘束ツールは、第1のコンプライアンス要素が規定の距離に延在するまで、第1のコンプライアンス要素の伸展を制限し得ない。第1の拘束ツールは、所望の位置、引張力、または範囲を変化させるように調節可能であり得る。本システムはまた、テザー構造と結合される、第2のコンプライアンス要素と、第2の拘束ツールとを備え得る。第2のツールは、第2のコンプライアンス要素を所望の位置に保持するように、または第2のコンプライアンス要素の動作を規定の範囲に制限するように、第2のコンプライアンス要素と解放可能に結合され得る。第1および第2の拘束ツールは、脊髄分節の正中線の対向側の第1および第2のコンプライアンス要素の整合および位置付けを容易にするように、解放可能かつ対称的に共に結合され得る。第1および第2の拘束ツールは、1つの自由度に沿って、相互に対して移動可能であり、それによって、様々な厚さの棘突起または正中線軟組織に適応し得る。第1または第2のコンプライアンス要素は、係止機構を備え得、第1または第2の拘束ツールのうちの少なくとも1つは、係止機構を用いて同心円状にドライバまたは他のツールを受容し、整列させるように適合される管腔を有する細長いシャフトを備え得る。第1または第2のコンプライアンス要素は、第1または第2の拘束ツールを用いて解放可能に係止する。第1または第2の拘束ツールはまた、係止機構が作動させられると、反対トルクを提供するように適合され得る。
【0025】
本発明の別の側面においては、患者の背下部痛を治療するための方法は、背下部を様々な曲げ位置に配置するように患者に指示を提供するステップと、患者が背下部痛を経験しない、または背下部痛が軽減される、背下部の閾値位置を決定するステップとを含み得る。閾値位置にある間の患者の背下部の第1の画像または一組の画像を提供し、患者の背下部の特徴は、第1の画像または一組の画像を使用して測定される。拘束デバイスは、患者の背下部に結合し、それに結合された拘束デバイスによって、背下部の特徴は、再測定される。再測定された特徴は、測定された特徴と比較され、患者の背下部が、測定された特徴と再測定された特徴との比較に基づく閾値位置より下の位置にあるように調節される。したがって、背下部痛または背下部の不安定性が軽減されるか、または排除される。
【0026】
決定するステップは、疼痛が経験される時を示すための手段を患者に提供するステップを含み得る。本手段は、作動可能なスイッチを備え得る。第1の画像または一組の画像は、X線、MRI、およびCTスキャンのうちの1つを含み得る。提供するステップは、疼痛を感じる姿勢と疼痛を感じない姿勢または疼痛が軽減された姿勢との間の患者の背下部の単一の連続動作から、一組の画像を取得するステップを含み得る。
【0027】
測定された特徴は、椎骨板間の角度、棘突起間の距離、および弓根間の距離のうちの1つを含み得る。測定するステップは、特徴を定量化するためにキャリパまたは角度測定デバイスを使用するステップを含み得る。
【0028】
結合するステップは、拘束デバイスを上棘突起および下棘突起または仙骨と係合するステップを含み得る。拘束デバイスは、背下部の曲げに抵抗する力を提供するように適合され得る。
【0029】
再測定するステップは、それに接合された拘束デバイスによって、患者の背下部の第2の画像または一組の画像を提供するステップを含み得る。第2の画像または一組の画像は、X線、MRI、またはCTスキャンのうちの1つを含み得る。再測定するステップは、1つ以上の放射線不透過性マーカーを患者の背下部と係合するように配置するステップを含み得る。放射線不透過性マーカーは、患者の背下部の棘突起と結合し得る。比較するステップは、第1および第2の放射線画像または複数組の画像を視覚的に比較するステップを含み得る。調節するステップは、拘束デバイスにおける長さまたは引張力を調節するステップを含み得る。
【0030】
本方法はさらに、それに拘束デバイスを結合するための、背下部の棘突起の存在および形状を評価するステップを含み得る。背下部内の面関節係合はまた、評価され得る。評価するステップは、面関節の関節突起の線形重複を測定するステップを含み得る。拘束デバイスを調節するステップは、背下部内の少なくとも1つの面関節における面関節係合を増大させるように、拘束デバイスを調節するステップを含み得る。調節するステップはまた、背下部内の少なくとも1つの面関節の過伸展または係止を防止するように、拘束デバイスを調節するステップを含み得る。本方法はさらに、背下部が測定および再測定された特徴の比較に基づく閾値位置の位置に、またはそれより下の位置にあるように、患者の背下部を手術中に操作するステップを含み得る。操作するステップは、その中で脊柱前弯症を形成または増大するように、患者の背下部を操作するステップを含み得る。
【0031】
本発明の別の側面においては、患者の背下部の変性脊椎すべり症を治療するための方法は、背下部を様々な曲げ位置に配置するように患者に指示を提供するステップと、様々な位置の背下部の複数の画像を提供するステップとを含み得る。患者の背下部内の面関節が亜脱臼し始める、背下部の閾値位置が決定され、次いで、閾値位置にある間の患者の背下部の第1の画像が提供される。拘束デバイスを患者の背下部に結合し、拘束デバイスが患者の背下部に結合された後に、手術中に患者の背中の第2の画像を提供する。第1および第2の画像を比較し、患者の背下部が第1および第2の画像の比較に基づく閾値位置より下の位置にあるように、拘束デバイスを調節する。したがって、関節の亜脱臼は、低減または排除される。
【0032】
決定するステップは、作動可能なスイッチ等の疼痛が経験される時を示すための手段を患者に提供するステップを含み得る。決定するステップはまた、尾椎骨に関して、面関節の係合または頭蓋椎骨の前方並進に抵抗する面関節の能力を評価するステップを含み得る。
【0033】
第1の画像は、X線、MRI、またはCTスキャンのうちの1つを含み得る。結合するステップは、拘束デバイスを上棘突起および下棘突起または仙骨と係合するステップを含み得る。拘束デバイスは、背下部の曲げに抵抗する力を提供するように適合され得る。第2の画像は、X線、MRI、またはCTスキャンを含み得る。1つ以上の放射線不透過性マーカーを患者の背下部と係合するように配置し得る。配置は、放射線不透過性マーカーを患者の背下部の棘突起と結合するステップを含み得る。
【0034】
比較するステップは、第1および第2の画像、または複数の組の画像間の椎骨版間の角度、棘突起間の距離、面関節係合、または弓根間の距離を比較するステップを含み得る。比較するステップはまた、第1および第2の画像の背下部の特徴を定量化するためにキャリパまたは角度測定デバイスを使用するステップを含み得る。第1および第2の画像は、視覚的に比較され得る。
【0035】
調節するステップは、拘束デバイスにおける長さまたは引張力を調節するステップを含み得る。本方法はまた、それに拘束デバイスを結合するための、背下部の棘突起の存在および形状を評価するステップを含み得る。
【0036】
本発明の別の側面においては、患者の背下部痛を治療するための方法は、背下部痛が軽減または排除される位置に患者の背下部を操作するステップと、その位置を記録するステップとを含む。患者の背下部においてその位置を手術中に再現し、拘束デバイスを背下部に結合する。
【0037】
操作するステップは、患者の背下部を手動で操作するステップと、患者の背下部において脊柱前弯症を形成または増大するステップとを含み得る。操作するステップはまた、調節可能な腰部部材を伴う枠または椅子に患者を配置するステップと、股関節を曲げさせるステップとを含み得る。股関節を曲げさせるステップは、骨盤を前傾させるように、大腿骨頭を通して近位方向に力を方向付け、それによって、患者の背下部において脊柱前弯症を形成または増大するステップを含み得る。膝は、拘束され得る。
【0038】
記録するステップは、作動可能なスイッチ等の疼痛が経験される時を示すための手段を患者に提供するステップを含み得る。再現するステップは、患者の背下部をその位置に手動で操作するステップ、または患者の背下部において脊柱前弯症を形成または増大するステップを含み得る。結合するステップは、拘束デバイスを上棘突起および下棘突起または仙骨と係合するステップを含み得る。拘束デバイスは、背下部の曲げに抵抗する力を提供するように適合され得る。
【0039】
本方法はさらに、その位置にある患者の背下部の画像を提供するステップを含み得る。画像は、X線、MRI、またはCTスキャンを含み得る。本方法はまた、位置を再現した後に、患者の背下部の手術中画像を提供するステップを含み得る。手術中画像は、X線、Cアーム蛍光透視法、MRI、およびCTスキャンのうちの1つを含み得る。放射線不透過性マーカーは、棘突起等の患者の背下部と結合され得る。本方法はさらに、患者の背下部の分節の可動域、分節安定性、線形剛性、または曲げ剛性を手術中に特徴付けるステップを含み得る。拘束デバイスは、患者の背下部の特徴付けに基づき調節され得る。調節するステップは、拘束デバイスにおける長さまたは引張力を調節するステップを含み得る。また、患者の背下部の特徴付けは、参照ガイドと比較され得、拘束デバイスは、参照ガイドによって提供される情報に基づき調節され得る。
【0040】
本発明のさらに別の側面においては、患者の脊椎すべり症を治療するための方法は、背下部を様々な曲げ位置に配置するように患者に指示を提供するステップと、患者が並進不安定性を経験しないか、または並進不安定性が軽減される、背下部の閾値位置を決定するステップとを含む。患者の背下部の第1の画像または一組の画像は、患者が閾値位置にある間に提供され、患者の背下部の特徴は、第1の画像または一組の画像から測定される。拘束デバイスを患者の背下部に結合し、それに結合された拘束デバイスによって患者の背下部の特徴を再測定する。再測定された特徴を、測定された特徴と比較し、患者の背下部が、測定および再測定された特徴の比較に基づく閾値位置より下の位置にあり、それによって、背下部の不安定性が軽減または排除されるように、拘束デバイスを調節する。
【0041】
これらおよび他の実施形態を付属の図面に関連する以下の説明において、さらに詳細に説明する。
【図面の簡単な説明】
【0042】
【図1A】図1Aは、脊椎の腰部領域の概略図である。
【図1B】図1Bは、矢状平面に沿って切り取った、脊椎の腰部領域の一部分を示す斜視図である。
【図2】図2は、米国特許第2005/0216017A1号に説明する種類の脊髄インプラントを図示する。
【図3】図3A−3Bは、棘突起を周囲する、さらなる組織を図示する。
【図4A】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4B】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4C】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4D】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4E】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4F】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4G】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4H】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4I】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4J】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4K】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4L】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4M】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図5A】図5A−5Bは、異なる基準点を強調する、脊椎の腰部領域の側面図を示す。
【図5B】図5A−5Bは、異なる基準点を強調する、脊椎の腰部領域の側面図を示す。
【図6】図6A−6Bは、脊椎の腰部領域の簡略した前後図の図5A〜5Bの基準点を図示する。
【図7】図7A−7Bは、人工装具円周を推測するために使用され得る、複数の基準点を強調する、脊椎の腰部領域の簡略した前後図を図示する。
【図8】図8A−8Bは、棘突起拘束デバイス上の較正マーキングの例示的実施形態を図示する。
【図9A】図9A−9Cは、拘束ツールの例示的実施形態を図示する。
【図9B】図9A−9Cは、拘束ツールの例示的実施形態を図示する。
【図9C】図9A−9Cは、拘束ツールの例示的実施形態を図示する。
【図10A】図10A−10Cは、拘束ツールの別の例示的実施形態を図示する。
【図10B】図10A−10Cは、拘束ツールの別の例示的実施形態を図示する。
【図10C】図10A−10Cは、拘束ツールの別の例示的実施形態を図示する。
【図11】図11A−11Cは、異なる姿勢にある患者の脊椎の曲率を図示する。
【図12】図12A−12Bは、脊椎後弯症および脊柱前弯症の脊髄運動分節を図示する。
【図13】図13A−13Bは、変性脊椎すべり症を有する脊髄運動分節を図示する。
【図14】図14A−14Bは、異なる姿勢の患者を図示する。
【図15】図15A−15Bは、脊椎後弯症および脊柱前弯症の脊髄運動分節を図示する。
【図16】図16A−16Cは、患者の背下部への腰力の印加を図示する。
【図17】図17は、様々な脊髄分節の特徴の測定を図示する。
【図18】図18は、様々な条件下の椎骨間の角度と分節曲げモーメントとの間の関係を図示する。
【図19】図19A−19Bは、総合腰運動に対する様々な条件下の総合腰運動への分節寄与を図示する。
【図20】図20は、下背部痛を診断し、かつ治療するための例示的アルゴリズムを図示する。
【図21A】図21A−21Cは、2つのコンプライアンス要素を拘束するための例示的ツールを図示する。
【図21B】図21A−21Cは、2つのコンプライアンス要素を拘束するための例示的ツールを図示する。
【図21C】図21A−21Cは、2つのコンプライアンス要素を拘束するための例示的ツールを図示する。
【図22】図22は、例示的コンプライアンス要素を図示する。
【発明を実施するための形態】
【0043】
図1Aは、棘突起(SP)、面関節(FJ)、層(L)、横突起(TP)、および仙骨(S)を含む、脊椎の腰領域を図示する、概略図である。図1Bは、矢状平面に沿って切り取った脊椎の腰領域の一部分を示し、本開示において、しばしば使用される、「中立位置」、「曲げ」、および「伸展」という用語を提示するために有用である。
【0044】
本明細書に使用する時、「中立位置」は、患者の脊椎がくつろいだ起立位置で休む位置を指す。「中立位置」は、患者によって異なるであろう。通常、そのような中立位置は、脊椎がわずか前方に凸性、およびわずか後方に凹性を有する、腰椎のわずかな曲率または脊柱前弯症によって特徴付けられるであろう。一部の場合においては、本発明の拘束の存在は、中立位置を修正し得る、例えば、デバイスは、未治療の脊椎の一部の伸展を有する、「新規」の中立位置を画定する、初期力を印加し得る。したがって、「中立位置」という用語の使用は、デバイスの存在、または不在の中で使用されるものである。本明細書に使用する時、「脊髄分節の中立位置」は、脊椎が中立位置にある時の脊髄分節の位置を指す。
【0045】
さらに、本明細書に使用される時、「曲げ」は、患者が前屈する時の脊髄分節の隣接椎骨間の運動を指す。図1Bを参照すると、患者が脊椎の中立位置から、すなわち、湾曲軸Aに対して右に前屈すると、椎骨板間Dの前方部分が圧縮されるように、前方側面の個々の椎骨L間の距離は減少する。対照的に、後方側面の個々の棘突起SPは、矢印Bで示す方向に離れるように移動する。したがって、曲げは、患者が図1Bに図示する中立位置から前屈するときの隣接椎骨間の相対的動作を指す。
【0046】
また、本明細書に使用する時、「伸展」は、患者が後屈し、脊椎が図1Bに図示する中立位置から延在するときの個々の椎骨L間の運動を指す。患者が後屈すると、個々の椎骨の後方端部は、離れるように移動する。隣接椎骨上の個々の棘突起SPは、矢印Bで示す方向とは反対の方向に相互により接近する。
【0047】
図2は、関連する米国特許第2005/02161017A1号に説明する種類の脊髄インプラントを示し、その全体の内容は、参照により本明細書に組み込まれる。図2に図示するように、インプラント10は、典型的には、一対のコンプライアンス要素16によって接合される、上部ストラップ構成要素12および下部ストラップ構成要素14を有するテザー構造を備える。上部ストラップ12は、L4の棘突起SP4の上部上に配置して示す一方、下部ストラップ14は、L5の棘突起SP5の底部上に延在して示す。コンプライアンス要素16は、ストラップ12および14に取り付けられるバネまたはゴムブロック等の内部要素を含み、典型的には、棘突起SP4およびSP5が曲げ中に離れるように移動すると、ストラップが「弾力的」または「追従的に」に引き離されるように取り付けられている。このように、インプラントは、曲げに抵抗する力を提供する弾性引張力を棘突起上に提供する。力は、突起がさらに離れるように移動すると増加する。通常、ストラップ自体は、本質的に非追従的であって、弾性率またはコンプライアンスは、コンプライアンス要素16によってのみ制御され、提供される。
【0048】
図3Aは、椎骨本体Vを分離する、椎間板Dを有する脊椎の腰領域の側面図である。棘状靭帯SSLは、棘突起SPの後方部分に沿って走り、棘間靭帯ISLならびに多裂腱および筋肉Mは、棘突起SPと平行して走り、そこに取り付けられる。図3Bは、図3Aの後方図である。
【0049】
図4A〜4Mは、図2の実施形態等の棘突起拘束を移植する例示的外科方法を図示する。脊髄インプラントを外科的に埋め込む第1のステップのうちの1つは、対象の脊髄領域にアクセスするために切開部を作成することである。図4Aは、切開部Iが患者の皮膚を通過して作成された後の背部Kの腰領域を示す。図4Bは、切開部Iが患者の皮膚を通過して作成された後の脊椎の腰領域を図示する。多烈筋および腱Mは、棘突起を露出するために収縮ツールTRで収縮させられている。
【0050】
切開部が作成された後に、棘状靭帯SSLを回避しながら、棘間靭帯ISLにアクセスし、穿孔するために先細りの遠位端を有する穿孔ツールTを使用し得、対象の第1の棘突起SSPの上の棘間靭帯穿孔P1を作成する。穿孔ツールTの例示的実施形態は、米国特許第12/478,953号(代理人整理番号第026398〜000610US)に開示されており、その全体の内容は、参照により本明細書に組み込まれる。この外科的アプローチは、それが棘状靭帯を無傷に維持し、多裂筋および腱、ならびに他の側副靭帯への損傷を最小化するため望ましい。図4Cに示すように、ツールTは、脊椎の右側面から、対象の第1の棘突起SSPに隣接する棘間靭帯ISLにアクセスし、かつ穿孔する。ツールTの遠位端を点線で示す。あるいは、ツールTは、代わりに、左側面から棘間靭帯ISLにアクセスし、かつ穿孔し得る。ツールTの遠位端はテザー102と結合され、その部分もまた、点線で示す。棘間靭帯ISLにアクセスし、かつ穿孔する他に、穿孔ツールTはまた、前進するか、または穿孔P1を介してテザー102にネジ山を付ける。図4Dに示すように、次いで、ツールTは、穿孔P1を通ってテザー102を位置付けたまま、取り外される。多裂腱および筋肉Mは、他の要素をより明確に示すように、図4Cおよび4Dにおいて図示しない。
【0051】
図4Eは、上記のステップが実行された後の脊椎の区画の後方図である。しばしば、ツールTの遠位先端TIは、着脱可能である。図4Eに示すように、遠位先端TIを用いて、ツールTが棘間靭帯ISLにアクセスし、かつ穿孔した後に、遠位先端TIは、ツールTから着脱され、対象の第1の棘突起SSPの上の穿孔P1(点線で示す)内の適所に残される。テザー102は、先端TIに遅行する。一部の場合では、遠位先端TIは、棘間靭帯ISLを完全に穿孔し得る。これらの場合においては、遠位先端TIは、棘間靭帯ISLを通過している一方、テザー102の一部分は、穿孔P1の適所に残されたままである。
【0052】
先端TIまたはテザー102aの一部分が穿孔P1の適所に残された後に、別のツールは、図4Fに示すように、それが、テザー102aおよびコンプライアンス要素104aを脊椎に対する適切な位置まで引っ張るように、先端TIに結合され、先端TIを引っ張り得る。コンプライアンス要素104aは、テザー102aに結合され、棘突起SPの曲げに抵抗する力を提供するために使用される。コンプライアンス要素104aは、締結機構または締結要素106aを含み、バネ、引張部材、圧縮部材、または同等物備え得る。関連するコンプライアンス要素は、共同所有の米国特許第12/106,103号(代理人整理番号第026398〜000410US)に説明されており、その全体の内容は、参照により本明細書に組み込まれる。
【0053】
ISLにアクセスするステップ、ISLを穿孔するステップ、およびテザー102にネジ山を付けるステップは、次いで、対象の第1の上脊髄突起SSPの下の隣接する棘突起ISPのための脊椎の対向する外側面で繰り返される。図4Gおよび4Hに示すように、ツールTは、脊髄正中線の左側面から棘間靭帯にアクセスし、棘間靭帯ISLを穿孔し、下棘突起ISPと標識される対象の第2の棘突起の下部に位置する、第2の穿孔P2を作成する。当業者は、穿孔ステップがまた、反対方向から実施し得ることを理解するであろう。図4Gに示すように、対象の下棘突起ISPは、対象の第1の上棘突起SSPに直接隣接し、その下にある。しかしながら、上棘突起SSPの代わりに下棘突起ISPで開始される説明した手順を実行することは完全に可能であり、例えば、穿孔P2を穿孔P1の前に作成し得る。対象の棘突起間に1つ以上の棘突起SPの間隙があり得ることも可能である。多裂腱および筋肉Mは、他の示す要素を明確にするために、図4Gおよび4Hにおいて図示しない。
【0054】
図4H、4Iおよび4Jに示すように、第1の穿孔するステップと併せて示すステップと同様に、テザー102bは、穿孔P2を通って穿孔され、ツールTの遠位先端TI(図4Iに最も良く示す)とともに適所に残される。図4Jに示すように、次いで、一対の鉗子等の他のツールを使用して、遠位先端TIを保持し、テザー102bおよびコンプライアンス要素104bを脊椎に対して適所に引っ張る。棘突起SPの対向側の対向するコンプライアンス要素104aおよび104bは、反対方向に配向される。各コンプライアンス要素104a、104bは、それぞれの各テザー102a、102bに結合され、かつ対応する締結機構または締結要素106a、106bを有する。締結機構106a、106bは、対向するコンプライアンス要素104a、104bのテザー102a、102bに結合するように構成される。締結機構の例示的実施形態に関するさらなる詳細は、米国特許第12/479,016号(代理人整理番号第026398〜000710US)および米国仮特許出願第61/059,543号(代理人整理番号第026398〜000800US)に開示されており、その全体の内容は、参照により本明細書に組み込まれる。例えば、図4Kに示すように、テザー102aは、コンプライアンス要素104bに係合し、次いで、締結機構106bを用いて、そこに解放可能に結合される。同様に、テザー102bはまた、コンプライアンス要素104aに係合し、締結機構106aを用いて、そこに解放可能に結合される。その配向を除き、コンプライアンス要素104aおよび104bは、同一である。当業者は、多くの異なる方向および構成で、テザーが締結機構に進入し、そこから出ること、および図4Kが単に1つの例示的実施形態であることを理解するであろう。
【0055】
締結機構106は、ドライバ特性108を備え得る。図4Lに示すように、ドライバ特性は、回転ドライバツールRTを受容するように適合される。ドライバ特性は、Phillipsヘッド、溝付きフラットヘッド、Torxヘッド、六角形ヘッド、または同等物であり得る。時計回りまたは反時計回りのいずれかであり得る、ツールRTの回転は、テザー102を適所に係止し、固定するように、締結機構106の構成を変更する。これは、図4Mに示すように、2つの棘突起SPを共に結合する、連続的多構成要素のテザー構造または拘束110を形成する。コンプライアンス要素104a、104bを使用して、棘突起SP間の曲げを制御する一方、テザー102a、102bおよび各締結機構106a、106bは、棘突起SPを共に結合するステップに寄与する。穿孔P1およびP2の位置、ならびにコンプライアンス要素104a、104bの長さによって、拘束110は、2つ以上の棘突起SPを共に結合し得る。一般に、コンプライアンス要素104a、104bは、脊椎に一般に平行する軸のテザー102a、102bを介して力が印加されると、弾力的に伸張するバネ状の要素を備える。棘突起または棘突起および仙骨が拘束された脊髄分節の曲げ中に離れるように移動すると、上テザー102aおよび下テザー102bもまた、離れるように移動する。コンプライアンス要素104a、104bはそれぞれ、バネ状要素の機械的特性によって決定された力を用いて、広がりに対して弾力的に抵抗するバネ状要素を含む。したがって、拘束110は、中立位置を越える脊髄分節の曲げに対する弾性抵抗を提供する。拘束110は、しばしば、7.5N/mm〜20N/mmの範囲の抵抗を提供するように構成されるが、その抵抗は、3N/mm以下、またはさらには0.5N/mm以下であり得る。拘束110はまた、脊髄分節が中立位置にある時に、棘突起または棘突起および仙骨にわたって締め付けを可能にするように特定の寸法で調節可能であり得る。他の関連するテザーの実施形態および接合方法は、米国特許第12/106,103号(代理人整理番号第026398〜000410US)、米国特許第2008/0009866号(代理人整理番号第026398〜000140US)、米国特許第2008/0108993号(代理人整理番号第026398〜000150US)、米国仮特許出願第60/936,897号(代理人整理番号第026398〜000400US)に開示されており、その全体の内容は、参照により本明細書に組み込まれる。
【0056】
図4A〜4Mの棘突起拘束デバイスが背部痛および/または脊髄の不安定な位置を効果的に低減させるために、拘束デバイスは、疼痛を感じる位置または不安定な位置を防止するか、または制限するように寸法決定されなければならず、例えば、拘束は、依然として脊髄分節の有意に制限されていない伸展を可能にしながら、脊髄分節の曲げに抵抗する力を提供しなければならない。したがって、医師は、脊髄分節に対して拘束装置を結合し、かつ調節するための方法および装置を必要とする。
【0057】
図5Aは、棘突起SPおよび椎骨の間に配置される椎間板Dを有する腰椎骨L3〜L5を含む、脊椎の腰領域の一部分の側面図を図示する。拘束デバイスの適切な寸法を決定する1つの例示的方法は、放射線画像等の罹患した脊髄分節の手術前の画像を入手するステップに関与する。放射線画像は、脊髄分節がデバイスの最終的に所望の中立位置にあるように、患者が所望の姿勢、好ましくは、疼痛を感じない姿勢にある間に撮影される。放射線画像から、2つの基準点を選択し、これらの基準点を使用して、拘束デバイスが調節されるべき寸法を推測する。また、放射線画像における拡大および歪み効果の決定に役立つために放射線画像を使用し得る。基準点との間の距離を測定するために尺度を放射線画像に使用し得、医師は、拡大および/または画像の歪みを補正し得る。好ましい実施形態においては、第1の基準点A1は、第1の椎骨に結合される第1の棘突起SPの上面上で選択され、第2の基準点A2は、第2の椎骨に結合される第2の棘突起SPの下面上で選択される。第2の椎骨は、患者が起立位置にある時に、第1の椎骨の下になる。点A1とA2との間の長さは、図5Aの矢印に示す標的距離を画定する。したがって、拘束デバイスが脊髄分節に適用されると、それは、基準点A1とA2との間の距離が手術前の標的距離に戻るまで、手術中に調節され得る。これは、患者が起立している時に拘束デバイスが中立位置にあるが、依然として脊髄分節の有意に制限されていない曲げを可能にしながら、脊髄分節の曲げに抵抗する力を提供することを保証するために役立つ。標的距離は、キャリパ、定規、デジタル放射線画像測定、または他の好適なゲージを用いて測定され得る。基準点A1とA2との間の距離が測定され、調節された後に、確認ステップは、外科手術を完了する前に、適切な距離が維持されていることを保証するために実施され得る。距離が標的値から変更されている場合には、外科医は、2つの基準点A1とA2との間の距離を標的距離に近付けるように、拘束デバイスを再調節して棘突起を再位置付けし得る。この微調節および再調節は、必要に応じて反復し得る。図6Aは、図5Aに見られる脊髄分節の簡略化された前後図を図示する。標的距離はまた、側面の放射線画像の代わりに、またはそれと併せて、前後の放射線画像を使用して推定し得る。
【0058】
別の好ましい実施形態においては、2つの基準点は、棘突起の異なる領域に沿って位置し得る。例えば、図5Bは、図5Aの脊髄分節と同一の図を図示するが、ここでは、第1の基準点B1は、第1の椎骨に結合される、第1の棘突起の下面に沿って位置し、第2の基準点B2は、第2の椎骨に結合される、棘突起の上面に沿って位置する。第2の椎骨は、患者が起立位置にある時に、第1の椎骨の下になる。点B1とB2との間の手術前の長さを入手するために、患者が起立位置等の好ましい姿勢にある間の脊髄分節の放射線画像または他の画像を使用し得、これは、図5Bの矢印で示す標的距離を画定するために使用される。この長さを使用して、図5Aを参照して前述した方法と同様の方法で、拘束デバイスの調節を制御し得る。図5Bに図示する基準点を使用する1つの利点は、図5Aの基準点の間の距離を測定するよりも、手術中にこの距離を測定するためにキャリパ、定規、ゲージピン、または寸法決定するブロックを使用することが容易であり得ることである。図5Bにおいては、この距離は、図5Bの「外側」寸法とは対照的に、「内側」寸法であり、したがって、一貫した位置において測定することがより容易であり得る。調節、確認、および再調節はまた、上述のように実施し得る。図6Bは、図5Bに図示する脊髄分節の簡略化された前後図を図示する。標的距離はまた、側面の放射線画像の代わりに、またはそれと併せて、前後の放射線画像を使用して推測され得る。拘束デバイスが標的値に設定されると、デバイスの任意のさらなる調節は、医師が所望のプレテンション値を設定することを可能にする。さらに別の実施形態においては、測定された距離は、両方の棘突起の上面間の距離であり得る。
【0059】
寸法決定アルゴリズムの別の実施形態は、罹患した脊髄分節の手術前の放射線画像から、棘突起拘束デバイスの円周を推定する。図7Aは、脊椎の腰領域の一部分の前後図を図示する。これは、棘突起SPおよび椎骨Dの間に配置される椎間板を有する、腰椎骨L3〜L5を含む。棘突起拘束デバイスSPDは、2つの棘突起SPを包囲する。この実施例においては、2つの棘突起は、相互に隣接するが、他の実施形態においては、1つ以上の棘突起は、棘突起拘束デバイスが結合される、2つの棘突起の間に配置され得る。第1の対の基準点は、それに棘突起拘束デバイスが調節されなければならない、円周を推定に役立つように、手術前の放射線画像上で選択され得る。図7Aにおいては、第1の基準点C1は、第1の椎骨に結合される第1の棘突起の上面またはそのわずか上に配置され、第2の基準点C2は、第2の椎骨に結合される第2の棘突起の下面またはそのわずか下に配置される。第1の椎骨は、患者が起立位置にある時に、第2の椎骨の頭方、またはその上になる。基準点C1およびC2は、長軸を画定し、長軸長を有する。長軸長は、キャリパ、定規、または、上述の技術等を含む他の測定技術を使用して、放射線画像から測定され得る。また、医師は、放射線画像における歪みまたは拡大を説明するために、測定結果を調節し得る。長軸は、図7Bにおいて、C1およびC2を通って延在する垂直の点線で示される。長軸長はまた、罹患した脊髄分節の側面図から推定され得る。棘突起拘束デバイスSPDの円周は、主要軸長と、上部および下部棘突起の頂点の周りに巻き付く拘束デバイスに適応する定数の二倍と推定され得る。この定数は、患者の身体(例えば、身長、体型等)の他の特性に基づき、放射線画像から測定される、または、参照テーブルから入手され得る。
【0060】
第2の対の基準点はまた、任意に、棘突起拘束デバイスSPDの調節された寸法の推定にさらに役立つように、手術前放射線画像上で選択され得る。図7Aにおいては、基準点D1およびD2は、その周りを拘束デバイスSPDが包囲する、棘突起SPの1つのいずれかの側面上で取得される。図7Aは、下棘突起のいずれかの側面のD1およびD2を示すが、それらはまた、上棘突起のいずれかの側面に位置し得る。基準点D1およびD2は、長軸に対して直角であり、短軸長を有する短軸を画定する。短軸は、図7Bにおいて、点D1およびD2を通って延在する、点線で図示される。短軸長は、長軸長と同様に測定され得る。
【0061】
長軸長および任意の短軸長が、手術前の放射線画像または他の手術前の画像から測定されると、棘突起拘束デバイスの円周を推定し得る。棘突起拘束デバイスの円周は、長方形として推定され得、したがって、長軸長の二倍と、短軸長の二倍であると計算される。拘束デバイスの円周はまた、卵形または楕円の円周を計算すること等によって、他のモデルを使用して推定され得る。さらに、長軸長および短軸長は、拘束デバイスの円周に相関し得、参照テーブルは、使用するための対応する調節寸法を提供し得る。拘束デバイスが棘突起の周りに埋め込まれると、その寸法は、その円周が計算された値または参照テーブルによって提供された値に一致するまで、調節される。拘束デバイスの円周は、直接測定され得るか、または拘束デバイス上の較正マーキングを使用して、拘束デバイスの寸法を示し得る。拘束デバイスの寸法が、標的値に設定されると、デバイスの任意のさらなる調節は、医師が所望のプレテンション値を設定するのを可能にする。
【0062】
図8A〜8Bは、デバイスにおける長さまたは周辺の推定に役立つように、棘突起拘束デバイス上に含まれ得る、較正マーキングの例示的実施形態を図示する。図8Aにおいては、棘突起拘束デバイス400のテザー部分402を図示する。テザーの先端404は、角度を付けて切断され、対向端部406は、係止機構(図示せず)を有するコンプライアンス要素で結合され得る開口部を形成するように、それ自体に対して折り畳まれ、固定される。先端上の角度は、2つ以上のデバイスが共に結合される時に、端部がこの棘突起拘束デバイスまたは他の棘突起拘束デバイスの係止機構内に容易に挿入されるのを可能にする。較正マーキング408は、印刷、エッチング、またはさもなければ、デバイスのテザー部分402に装着され得る。較正マーキング408は、相互から公知の距離で離間させられ得るか、または数はまた、読み込みを容易にするためにマーキングとともに含まれ得る。較正マーキングは、テザー長または円周、または医師が、手術前の起立位置の放射線画像から推定された標的値までテザーを調節するのを可能にする別のパラメータを示し得る。図8Bは、図8Aの拡大図である。
【0063】
デバイスにおける長さまたは周辺を推定するステップの他に、疼痛が経験される閾値位置を確立するために、様々な位置の患者の下部の腰椎を特徴付けることも所望であり得る。この閾値位置が決定されると、拘束デバイスは、患者の脊椎に適用され、患者の背部が閾値位置にあるか、またはそれより下のままにあることを保証する手助けとなるように調節され得る。したがって、疼痛を悪化させる曲げの臨床的評価は、診断技術に基づく画像化に関係し得、様々な要因は、背下部痛の特徴化において定量化され得る。例えば、疼痛または面関節の亜脱臼を引き起こすか、または悪化させる曲げ量が測定され得、天然組織構造の並進に抵抗する能力が決定され得る。任意の不安定性の性質および程度はまた、評価され得る。仙骨上の棘突起の存在および形状はまた、拘束デバイスで結合するために評価され得る。棘突起の形状はまた、拘束デバイスを受容するために、棘突起の修正が必要であるか否かの決定と共に評価され得る。また、曲げを制限するために使用する拘束デバイスの剛性、寸法および/または張力は、特別の患者を最適に治療するために推定され得る。
【0064】
図11A〜11Cは、患者が異なる姿勢にある時の患者の下部腰椎の曲率を図示する。図11Aにおいては、患者1102は、中立の起立位置にあり、下部腰椎1104は、脊柱前弯症として称される、点線1106で示す背側が凹部の曲率を有する。前屈(図11B)または座位(図11C)と同様に、脊椎が湾曲する時に、前弯曲率は、平坦化する。脊椎が湾曲し続けると、曲率は、点線1108で図示するように、前方の凹面に移動し得る。これは、脊椎後弯症と称される。
【0065】
疼痛を悪化させる曲げは、しばしば、機械的背下部痛として称され、脊椎が曲げ姿勢にある時に疼痛を伴う。疼痛を悪化させる曲げは、椎骨板間の変形に関与し得る(変形カスケードは、Kirkaldy−Willisによって、より詳細に説明されている)。診断前技術は、しばしば、椎間板の高さのフイルムX線分析、可動域(ROM)およびMRIに基づく(磁気共鳴影像法)椎間板変形(例えば、Pfirrmann MRI分類システム)の等級付けを含む、臨床評価の基準として変性椎間板の減少に、より焦点を置いていた。
【0066】
図12Aは、重複する面関節1208とともに、2つの椎骨Vおよび椎間板Dを有する脊髄分節1202を図示する。脊髄分節は、しばしば、点線1210で示す、中立(前弯)姿勢において疼痛を伴わない。しかしながら、図12Bに図示するように、分節が曲げすると、分節は、より疼痛が大きくなり得る。曲げ1204は、点線1212で示すように、脊柱前弯症から脊椎後弯症へ脊髄分節の曲率を変化させ、疼痛1206をもたらす。疼痛を引き起こす曲げ量は、患者によって異なり得る。
【0067】
変性脊椎すべり症(DS)等の他の病理学はまた、曲げによって悪化され得る。DSにおいては、面関節の変形は、運動分節のせん断並進に抵抗する固有の能力を低下させる。これは、面関節の係合が減少すると、曲げにおいて悪化される。図13Aは、2つの椎骨および椎間板Dを有する脊髄運動分節1302を図示する。面関節1304は、変形し、したがって、健康な面関節(例えば、図12Aに図示する)と同程度に重複しない。図13Bに図示するように、脊髄分節1302が曲げ1306に移動すると、面関節1304は、相互から分離し、したがって、他の椎骨Vに対する1つの椎骨Vのせん断移動1308に抵抗することできなくなり、したがって、それらは、椎間板Dを歪ませ、疼痛を引き起こしながら、移動する。変性脊椎すべり症のための典型的な診断技術は、神経学的症状および全体の機械的不安定性(例えば、可動域および椎骨間並進)の評価に焦点を置いている。
【0068】
単純写真放射線画像(X線)は、どの姿勢が疼痛または不安定性を引き起こすかを決定するために、様々な姿勢の患者で撮影され得る。手術前の任意のインプラントの計画および寸法決定のために、X線を使用して、椎骨版間の角度、棘突起間または弓根距離を測定し得る。この姿勢で撮影されたX線は、疼痛を引き起こす分節姿勢を臨床医に示す。この姿勢は、患者が疼痛を経験する位置の上、および疼痛が軽減または排除される位置の下である閾値位置を表す。図14Aは、腰脊髄分節1404が曲げ1406状態になるように、前屈している患者1402を図示し、図14Bは、脊髄分節1404が中立位置にあるように、起立している患者1402を図示する。患者は、疼痛が開始される、または中断したことを示すために、ボタンまたはスイッチを作動し得る。スイッチは、画像が疼痛の閾値および他の姿勢で取り込まれるように、放射線装置に統合され得る。
【0069】
棘突起の放射線画像が変化しやすい可能性があるため(特に、軟骨組織が存在する場合)、放射線不透過性マーカーを使用して、解剖学的パラメータを測定するための一貫した測定点/基準を提供し得る。例えば、タンタルビーズは、棘突起の分離の一貫した測定を可能にするように、棘突起内に埋め込まれ得る。測定のための一貫した参照を提供するビーズを用いて、所望(恐らく、疼痛を伴わない)姿勢は、動作設定においてより確実に再現し得る。
【0070】
疼痛に対する姿勢を評価するステップの他に、この技術は、小関節面係合等の姿勢に依存する特質を評価し得る。面関節の係合は、分節の曲げに伴い減少し、それは、変性脊椎すべり症等の症状を悪化させ得る。面関節が亜脱臼し始め、せん断荷重および並進運動に対する抵抗は減少される姿勢を決定するために、放射線を使用し得る。次いで、上述の技術を使用して、これらの姿勢を予防するために、曲げ拘束を適用し、調節し得る。図15Aは、2つの椎骨V、椎間板D、および面関節1504を有する、腰脊髄運動分節1502を図示する。脊髄分節1502は、曲げ1506状態にある一方、図15Bの脊髄分節は、脊髄分節が湾曲1508を有する、中立位置にある。棘突起SPD間の距離は、放射線画像から、椎骨版間の角度IVDAと共に測定され得、これらのパラメータを使用して、閾値位置を特徴付け得る。疼痛を感じる(図15A)および疼痛を感じない姿勢、または疼痛が軽減された(図15B)姿勢の放射線画像からの解剖学的測定は、外科医が患者を手術台に正確に位置付け、曲げを拘束するインプラントに正確な寸法および張力を適用する上での補助になり得る。拘束を埋め込むための目的は、疼痛を伴わない動作が可能である一方、疼痛を伴う、または不安定な動作を制限されることである。対象の測定は、棘突起(SPD)と椎骨版間の角度(IVDA)との間の距離を含み得る。
【0071】
単純フイルム放射線写真および得られる測定はまた、疼痛を引き起こす状態および運動を決定するために、患者の日常生活の通常の活動中の曲げの姿勢測定に相関し得る。例えば、患者は、脊髄曲げを測定するゴニオメータまたは背下部の皮膚上の歪みゲージで装着され得る。ゴニオメータまたは歪みゲージからの測定は、腰曲げを推定するための上述の放射線測定に相関することができる。患者は、通常の日常生活中に、恐らく1日または1週間の間、デバイスを着用する。デバイスは、腰曲げ、および患者による疼痛を示すための入力を記録する。デバイスによって記録されたデータは、患者の疼痛の状態、頻度、および姿勢依存に関して、医師に報告することができる。
【0072】
患者の脊椎は、疼痛を伴わない姿勢をもたらし、分節不安定性または手術後の治療の有効性を評価するために、医師によって手動で操作され得る。臨床的診断設定においては、これは、典型的には、前弯曲線を作成するために、下部の腰椎に対して押し付けることによって行われる(自動車の座席の背部の支持部が脊椎の曲率を支持するように機能するのと同様)。調節可能なボルスタ(プランジャ等)を伴う枠または椅子を使用して、脊椎に反復可能な操作を適用し得る。あるいは、股関節曲げ(座席の角度を介する)を使用して、脊髄の姿勢を操作し得る。これらの技術はまた、大腿骨頭および股関節を介する近位方向に方向付けられた力を使用して、骨盤を前傾させ(前方に回転させ)、したがって、前弯曲率を誘発し得る。大腿骨頭を介して近位方向に方向付けられた力は、典型的に、膝に力または抑制を印加することによって達成されるであろう。
【0073】
医師は、疼痛を伴うまたは疼痛を伴わない腰姿勢にアクセスするために、これらの方法およびシステムを使用し得る。上述のように、患者は、疼痛の閾値を示すためにスイッチを作動し得る。スイッチは、動的放射線写真のためにタイムスタンプを提供する、またはX線機械が画像の取り込みを始動することができる。枠または椅子が放射線透過性である場合には、次いで、放射線画像はさらに、疼痛を伴う姿勢への動作を防止するように、医師が疼痛を伴わない姿勢を手術中に再現し、拘束構造を適用することを可能にし得る。また、上述のように、タンタルビーズ等の埋め込まれた放射線不透過性マーカーは、放射線測定のために一貫した基準点を提供し得る。
【0074】
図16Aは、患者1602の脊椎1604が曲がっている1606、通常の疼痛を伴う姿勢を図示する。患者は、着席している可能性があるか、または患者は、脊椎が曲げ状態にある、任意の他の位置にあり得る。図16Bは、腰椎1604の脊柱前弯症1608を回復させる、力1610または支持(自動車の座席の腰支持部と同様)の適用で、そのように疼痛が緩和されるかを示す。操作された疼痛を伴わない姿勢の放射線画像は、以前に疼痛を伴った姿勢の疼痛を緩和するために、脊髄整合が変化されるように、曲げ拘束デバイスを埋め込むために、上述のように使用し得る。
【0075】
上述のように、診断的脊髄操作は、一貫した姿勢操作を適用するために、システムを用いてさらに反復可能に実施され得る。一例は、図16Cに見られる椅子である。患者1602は、座席1616、背部1614、および方杖1618を有する椅子に着席している。プランジャ1612は、腰椎1604に操作圧力を印加することができ、方杖1618は、患者を所望の位置に維持するために役立つ。椅子は、好ましくは、前述のように放射線写真が得られ、曲げ拘束を埋め込むために使用し得るように、放射線透過性である。
【0076】
この目的に使用し得、上記に図示したシステムと同様の原則で動作する装置は、「Nada Chair」(http://www.nadachair.com/)で市販されている。腰椎の周りに巻きつけられるストラップは、脊柱前弯症回復腰支持を提供する。ストラップの対向端部は、それが、張力がかけられ、腰椎および大腿骨頭(膝を介する)の両方に力を印加することができるように、膝の周りに巻きつけられる。そのような装置を使用して、腰椎に機械的操作を適用し、疼痛に対する姿勢の影響を決定し得る。他の支持部または整形機器は、曲げによって悪化された姿勢の疼痛を診断するために同様に使用し得る。
【0077】
また、手動または機械的操作は、分節生体力学および不安定性にアクセスするために、手術中に使用し得る。外科医は、調節可能な台(Jackson Axisの台等)、またはラミナースプレッダーもしくはMekanika脊髄合成ゲージデバイス等の機器を使用して、曲げ拘束から必要とされる再安定化の量および種類を決定するために可動域または分節不安定性を測定し得る。これは、分節生物力学が手術によってどのように影響を受けるかを理解するために、分節不安定性が圧縮手順の前後に評価され得る、圧縮等の潜在的な不安定な手順に特に有用であり得る。例えば、外科機器は、脊髄構造(通常、N/mm)の線形剛性を評価するために、印加された荷重および椎骨構造(典型的には、棘突起または層)の置換を測定し得る。線形剛性および外科的機器から分節の回転中心(COR)までの距離の測定または推定を用いて、分節の曲げ剛性を、通常、1度当たりニュートンメートルで推定することができる。これは、以下のように計算し得る:
【0078】
【数1】
ここで、
Kは、分節曲げ剛性(通常、N−m/deg)であり、
Pは、外科機器によって印加された荷重(通常、N)であり、
ΔLは、機器によって印加された仮骨延長または圧縮(通常、mm)であり、
Rは、モーメントアーム、または機器から分節の回転中心までの距離(通常、mm)であり、
係数0.001は、ミリメートルの可変LおよびRに適応するように使用され、可変Kは、ニュートンメートル/度である。
【0079】
図17は、椎間板Dによって分離される、2つの椎骨Vを有する脊髄運動分節を示し、これらの測定を概略的に図示する。外科機器1702は、隣接椎骨Vの棘突起SP間に挿入され、仮骨延長または圧縮、および椎骨構造に印加された荷重を測定する。モーメントアーム1706は、運動分節の回転中心1704から外科機器1702までの距離である。分節曲げ剛性の評価を用いて、外科医は、安定化のための適切な計装(例えば、脊髄ロッド)、ならびに計装の剛性および気密度の決断を下すことができる。雛型参照テーブルソフトウエアプログラムまたは他のアルゴリズムは、これらの測定を用いて、そのような決断を下すために、埋込システムとともに提供され得る。例示的一実施形態においては、曲げへの弾性抵抗を提供するためのシステムは、複数の剛性で提供され得る。埋込システムと共に使用するために提供されるテーブルは、手術中に測定されたパラメータに基づき、どの剛性が特定の患者に適切であるかを推奨し得る。
【0080】
また、ビデオ放射線透視検査、またはX線画像のいくつかの枠から得られたもの等の動的放射線写真を使用して、より特異性および解像度で不安定性を評価し得る。変性脊椎すべり症においては、動的放射線写真は、小関節面が不安定になる、椎骨間の角度の特定に役立ち得る。椎骨の定量的運動分析はさらに、特定の運動分節の曲げ不安定性の性質を特定し得る。例えば、全体の脊椎が曲げに移動すると、運動のより大きな部分が単一の運動分節で生じ得、その分節における曲げ不安定性を示す。さらに、不安定性は、全体の可動域の特定部分内に圧倒的に存在し得る。これらの診断的な動的放射線写真技術の使用は、医師が、病理学的に不安定または疼痛を伴う曲げ動作を予防しながら、できるだけ多くの中立動作を可能にする曲げに対する拘束を適用するのを可能にし得る。同様の動的放射線写真測定を使用して、任意の治療の生物力学的有効性を評価し得る。
【0081】
上述のように、患者は、恐らく、動的放射線写真上のタイムスタンプとして、疼痛閾値を示すためにスイッチを使用し得る。また、動的放射線写真を使用して、可動域にわたる、面関節係合もしくは亜脱臼、または椎骨間並進を決定し得る。埋込可能な放射線不透過性マーカーは、外科医が手術中に所望の姿勢を再現するのを可能にする、一貫した測定基準を提供し得る。次いで、これらの技術を使用して、所望の姿勢が制限されるように、曲げ拘束を適用し得る。
【0082】
図18は、2つの異なる状況における、椎骨間の角度と分節曲げモーメントとの間の関係を図形で図示する。動的放射線写真は、中立ゾーン(湾曲A)に対する過可動性または過剰な総ROM(湾曲B)の周りの不安定性等の不安定性の性質を特定することに役立ち得る。不安定性の性質は、拘束デバイスの適用に影響を及ぼし得る。例えば、湾曲Aは、よりきつく埋め込まれる拘束を必要とし得る一方、湾曲Bは、より硬化な拘束を必要とし得る。
【0083】
図19A〜19Bは、2つの異なる状況における、全腰運動に対する分節寄与と全腰運動との間の関係を図形で図示する。動的放射線写真は、全可動域を介する、異なる運動分節間の関係を示すことができる。図19Aは、腰の全可動域にわたって均等に曲がる5つの運動分節を図示する。図19Bは、脊椎が曲がり始めると、L4〜L5分節が動作の最大部分を占める、運動分節を図示する。しかしながら、5つの分節の全可動域は、同一である。動的放射線写真は、L4〜L5の初期段階の不安定性を検出し得る一方、従来のX線は、すべての分節が同一の全可動域を有することを単純に示し得る。分節不安定性の性質を理解することは、医師が曲げ拘束インプラントを適切に適用することを可能にする。
【0084】
上述の診断的および治療技術のいずれかは、プロセスの一部としてソフトウエアを使用し得る。ソフトウエアは、椎骨版間の角度、組織剛性、株、または動的動作の特性等の解剖学的特性の測定を促進し得る。ソフトウエアパッケージは、適切な寸法、剛性、または張力等の曲げ拘束インプラントの適切なパラメータを計算するために、これらの測定を使用し得る。ソフトウエアは、目的とした生物力学的影響を有するように、拘束が移植されていることを手術中または手術後に確認し得る。例示的方法を図20に図示し、そこでは、先ず、疼痛または不安定性を引き起こす姿勢が決定され2010、次いで、疼痛を伴うおよび疼痛を伴わない姿勢、または疼痛が軽減される姿勢2020において、解剖学的特徴が測定される。曲げ拘束の適切なパラメータ(例えば、剛性、寸法、張力等)2030が計算され、次いで、外科医は、拘束2040を埋め込む。次いで、姿勢矯正は、確認され得る2050。
【0085】
図4A〜4Mに対して、上記に前述するように、棘突起拘束デバイスは、しばしば、脊髄分節正中線にわたって、棘突起についての対向側に位置付けられる、1つ以上のコンプライアンス要素を含む。コンプライアンス要素は、棘突起が相互から離れるように移動する時に、脊髄分節の曲げに抵抗する力を提供することに役立つようにバネのように機能する。コンプライアンス要素のため、相互からの標的位置に棘突起を位置付けるか、または円周等の人工装具の標的寸法を提供するためにデバイスを調節することは、困難であり得る。デバイスに張力が加えられると、コンプライアンス要素は、伸張し、かつ参照距離の決定を防止するであろう。したがって、拘束デバイスの調節中にコンプライアンス要素の伸張を防止することができる、拘束ツールを提供することは有利であろう。拘束ツールは、前述の展開および埋込手順中に使用し得る。拘束ツールは、デバイス長または円周の調節中に、その伸張を一時的に制限するか、または所望値への進展を制限するために、コンプライアンス要素に適用される。コンプライアンス要素が調節されると、拘束ツールは取り外され得る。次いで、医師は、その中の所望のプレテンションを確立するために、拘束デバイスの調節を継続し得る。
【0086】
図9A〜9Cは、棘突起拘束デバイスの調節中に、コンプライアンス要素514を保持するように適合される、拘束ツール500の例示的実施形態を図示する。9Aにおいては、複数のアーム504、506、508、510は、細長いシャフト502から延在して、コンプライアンス要素514を受容するためのクレードルまたはレセプタクル512を画定する。コンプライアンス要素514は、クレードル512内に配置される、またはその中にスナップ嵌めされ、アーム504、506、508、510は、コンプライアンス要素514の対向端部に係合し、その拡張を防止する。他の実施形態においては、クレードルの寸法は、可変である、または所定の延長量を可能にするために、コンプライアンス要素よりも大きく寸法決定され得る。また、複数のアーム504、506、508、510は、コンプライアンス要素514上のネジまたは開口部を調節するための容易なアクセスを可能にするように、十分に離間される。拘束ツール500は、外科機器に一般に使用される、チタニウム、ステンレス網、またはABS等のポリマー等の任意の数の金属から加工され得る。図9Bは、クレードル512内に配置される、コンプライアンス要素514を有する、拘束ツール500の側面図を示す。図9Cは、図9Bの斜視図を図示する。アーム504、506、508、510は、好ましくは、デバイスの操作に介入しないか、または例えば、拘束デバイスの動きに介入するか、または拘束デバイスを棘突起から離れるようにオフセットすることによって、寸法決定に影響しない。
【0087】
拘束ツール600の別の例示的実施形態を、図10A〜10Cに図示する。図10Aにおいては、拘束ツール600は、細長いシャフト602、および複数の軸方向に延在するアーム604、606、608、610を有する枠を含む。複数のアーム604、606、608、610は、コンプライアンス要素616を保持するためのクレードルまたはレセプタクル612を画定する。クレードル612は、コンプライアンス要素にも含まれ得る、任意の調節ネジおよび開口部を含む、コンプライアンス要素への容易なアクセスを可能にするように、十分に開口される。さらに、開口部614はまた、コンプライアンス要素616の係止機構へのアクセスを可能にする。係止機構は、係止ローラを備え得、その詳細は、米国特許第12/479,016号(代理人整理番号第026398〜000710US)に開示されており、その全体の内容は、参照により本明細書に事前に組み込まれている。拘束ツール600は、図9A〜9Cを参照して、上記に開示する任意の材料から加工され得る。図10Bは、クレードル612内に配置される、コンプライアンス要素616を有する、拘束ツール600の側面図を図示し、図10Cは、図10Bの斜視図である。
【0088】
拘束デバイスが2つのコンプライアンス要素を有する実施形態においては、調節中にコンプライアンス要素の両方の移動を同時に制限することができる、2つの拘束ツールを有することが有利である。図21A〜21Cは、そのようなツールの例示的実施形態を図示する。ツールは、相互に一致する2つの拘束ツール2102a、2102bを含む。各ツールは、近位端付近に回転可能なノブ2106a、2106bを有する、細長い管状シャフト2104a、2104bを含む。管状シャフトは、ノブを回転させることにより、シャフトを前進または後退させるように、ノブにネジ山で結合される、先細りのシャフトであり得る。したがって、シャフトが後退すると、アーム2118a、2118bは、コンプライアンス要素を圧縮し、その周りを閉口する。
【0089】
中心管腔2108a、2108bは、シャフトの近位端からシャフトの遠位端に延在し、ツールは、下記に説明するように、中心管腔内に位置付けられ得る。各シャフトとの近位端付近のフランジ領域2120a、2120bは、ピン2112a、2112b、および開口部2110a、2110bを含む。1つのツールのピンは、対向ツールの開口部内に位置付けられ得、それによって、2つのツールを共に解放可能に結合し、それらを実質的に相互に対して並行に維持する。シャフトの遠位端は、シャフトから半径方向外向きに延在し、溝付き領域2116a、2116bを有する、アーム2114a、2114bを含む。シャフトの遠位端はまた、第2の2118a、2118bを有する。各ツール上の2つのアームは、拘束デバイスのコンプライアンス要素を受容し、調節中にその拡大を制限するためのクレードルを形成する。フランジ領域2120a、2120bは、異なる患者の生体構造に適応するように寸法決定され得るが、好ましい実施形態においては、2つのツールの長手方向軸は、棘突起または棘間/棘上靭帯複合体にまたがるための十分な距離2130(図21Cにおいて最もよく見られる)によって分離される。この距離は、患者によって異なり得るが、好ましい実施形態においては、10mm〜25mm、より好ましくは、15mm〜20mmの幅である。また、上述のピン開口部結合機構を使用することによって、2つのツールは、依然として、1つの自由度を有し、内外方向に移動することができる。コンプライアンス要素は、管腔がコンプライアンス要素上の調節特性と整列するように、クレードル内に保持される。例えば、図22は、らせん状ネジ状本体2204を有する、コンプライアンス要素2202の例示的実施形態を図示する。コンプライアンス要素の1つの端部上のピン2208は、その上にコンプライアンスデバイスのテザー構造2206を固定し、対向端は、コンプライアンス要素筐体2210に係止ネジ2212およびテザー調節ローリング機構(図示せず)を含む。係止ネジ2212が緩む時に、ツールは、ローリング機構を回転させて、そこを通過するテザーを締結または緩めるために、筐体内に挿入され得る。調節が完了すると、係止ネジは、ローラを適所に係止するように、締結され得る。これらの特性は、それらが、係止ネジまたはローラ機構と同心円状に整列させられる拘束デバイスシャフトの管腔を通って、ツール(例えば、ネジドライバ、六角形ドライバ等)を通過させることによってアクセスされ得る。拘束ツールの別の利点は、ローラ機構および係止ネジを締結するプロセス中に反対トルクを提供することである。
【0090】
上記は、本発明の好ましい実施形態の完全な説明であるが、様々な代替、修正、および等価物が使用され得る。したがって、上記の説明は、付属の請求項によって定義される、本発明の範囲を制限するものと解釈されてはならない。
【技術分野】
【0001】
(1.発明の分野)
本発明は、概して、医療方法および装置に関する。より具体的には、本発明は、整形外科的な内部固定手術中に人工装具を脊髄分節に結合し、人工装具を調節するために使用される方法および装置に関する。これは、背部痛または他の脊髄症状を有する患者の治療を含むが、それに限定されない。
【0002】
慢性背下部痛の主な原因は、椎間板内破裂としても称される、椎間板起因の疼痛である。椎間板起因の疼痛を罹患する患者は、若年であるか、さもなければ、背部に局限した疼痛を呈する健康な個人である傾向がある。椎間板起因の疼痛は、通常、脊椎のL4−L5またはL5−S1の接合部に位置する椎間板で生じる。疼痛は、患者が腰椎を曲げさせた時に(すなわち、座位または前屈によって)悪化し、腰椎を伸展させた時に(すなわち、立位または後屈によって)緩和する傾向がある。曲げおよび伸展は、腰部の機械的荷重パターンを変更することで公知である。腰部が伸展状態にある時に、腰部によって負担される軸荷重は、椎間板および面関節によって共有される(荷重の約30%は、面関節によって負担される)。曲げにおいては、分節荷重は、椎間板によってほぼ完全に負担される。さらに、核は、後方に移動し、輪(神経支配されている)の後方部分上の荷重を変化させ、その線維が引張力およびせん断力を受ける可能性が高い。次いで、分節曲げは、椎間板によって負担される両方の荷重を増大させ、それらは、より疼痛を伴う方法で負担させられる。椎間板起因の疼痛は、比較的機能障害になる可能性があり、一部の患者では、労働および生活を満喫する能力に影響を及ぼす可能性がある。
【0003】
椎間板起因の背下部痛を罹患する患者が経験する疼痛は、曲げ不安定性と考えることができ、他の疾患で認められる曲げ不安定性に関連する。これらの最も一般的なものは、異常分節の並進が分節の曲げによって悪化する、脊髄症状の脊椎すべり症である。本明細書に説明する方法およびデバイスはまた、それ自体、これらの他の脊髄障害または分節の曲げに関連する治療のために有用でなければならず、そのためには、脊髄分節の曲げの予防または制御が望ましい。本明細書に説明する方法およびデバイスが使用され得る別の用途は、運動を制限し、治癒を促進し、術後の疼痛を緩和するために、脊椎固定術と併せることである。あるいは、説明する方法およびデバイスはまた、圧迫骨折セメント固定、椎間板全置換、核増生、および環修補を含む、脊椎前柱の他の治療と併せて有用でなければならない。
【0004】
椎間板起因の疼痛を罹患する患者は、疼痛を伴う部分を曲げさせる座位等の位置を回避し、痛みを伴う部分を伸展状態に維持する立位等の位置を好むことによってそれらの症候群を調節する。椎間板起因の疼痛を軽減するための1つのアプローチは、しばしば、会社の椅子に取り付けられている腰支持枕の使用に関与する。生物力学的に、偏在する腰支持枕の目的とした効果はまた、疼痛を伴う腰セグメントを疼痛の少ない伸展位置に維持することである。
【0005】
慢性椎間板起因の疼痛と診断された患者のための現在の治療における代替案は、かなり制限されている。多くの患者は、理学療法、マッサージ、抗炎症および鎮痛剤投薬、筋肉弛緩剤、および硬膜外ステロイド注射等のその後の治療コースを受けるが、典型的には、有意な程度の疼痛に悩まされ続ける。他の患者は、通常、隣接椎骨の癒着と共に椎間板切除(椎間板の除去)を必要とする、脊椎固定術を受けることを選択する。癒着はまた、例えば、茎ネジおよび固定ロッドを含む、罹患した脊髄分節の計装を含み得る、または含み得ない。癒着は、それが不可逆的であり、費用がかかり、高い罹患率を伴い、不確かな有効性を有するため、椎間板起因の疼痛に安易に推奨されていない。しかしながら、その短所にも関わらず、椎間板起因の疼痛のための脊椎固定術は、実行可能な代替案がないため、依然として一般的である。
【0006】
実践において一般的に使用されていないが、米国食品医薬品局(FDA)によって使用が認可されている代替的方法は、棘突起または他の椎骨要素を包囲し、それによって、運動に対する拘束を形成する、骨セルクラージュデバイスの適用である。医師は、典型的には、生体構造上に一定の高い力を印加し、1つの位置に分節を固定し、効果的に運動を不可能にさせる、引張または伸長をデバイスに印加する。そのようなデバイスの適用後に可能になった運動の欠如は、同時に実施される癒着の可能性を改善するために有用であると考えられ、癒着が行われない場合には、これらのデバイスは、デバイス、またはデバイスが取り付けられる棘突起の破損により機能しなくなる。これらのデバイスは、備え付け用途のために設計され、可動域にわたる曲げへの動的弾性抵抗を可能にするために設計されるものではない。上述の骨セルクラージュデバイスおよび他の技術の目的は、対象の椎骨分節の測定可能な運動をほぼ完全に制限することである。所与の分節におけるこの運動の喪失は、最終的に隣接分節の罹患率につながる可能性のある、隣接分節における異常な荷重および運動を引き起こす。
【0007】
セルクレージュデバイスに付随する問題のいくつかを回避する代替的解決策は、テザー構造等の脊髄分節に結合される弾性構造の使用に関する。弾性構造は、しばしば、実質的に制限されていない脊髄の伸展を可能にしながら、曲げに対する消極的抵抗を増大することによって、疼痛を緩和することができる。これは、患者が緩和を提供するために既に使用する、姿勢適応の機械的影響を模倣する。
【0008】
テザー構造を使用する脊髄インプラントは、現在、商業的に入手可能である。そのようなインプラントの1つは、それらの茎を介して隣接椎骨を結合する。このインプラントには、スペーサ、テザーおよび茎ネジが挙げられる。インプラントを設置するために、椎間板および椎骨の選択した部分は、除去される。次いで、インプラントは、脊椎の各側面の2つの隣接茎を結合するために配置される。茎ネジは、インプラントを適所に固定する。テザーは、止めネジを用いて茎ネジに締め付けられ、対象の椎骨の伸展/曲げ動作を制限する。有意な組織が除去されるため、かつネジが茎内に配置されるため、インプラントおよび付随する外科方法は、侵襲性が高く、インプラントは、しばしば、不可逆的に埋め込まれる。付随する重要な神経根損傷の機会も存在する。また、止めネジの先端は、テザーを締め付け、これは、微粒子の摩耗粉の生成のテザーの他に摩滅を引き起こし得る。
【0009】
テザー構造を使用する他のインプラントは、代わりにそれらの突起を介して隣接椎骨を結合する。これらのインプラントには、テザーおよびスペーサが挙げられる。インプラントを設置するために、棘状靭帯は、一時的に持ち上げられ、置き換えられる。次いで、対象の2つの隣接椎骨の間の棘間靭帯は、永久的に除去され、スペーサは、棘間の隙間に挿入される。次いで、テザーは、隣接棘間靭帯を介して2つの隣接椎骨の突起の周に巻き付けられ、次いで、スペーサによって、またはスペーサに締結された個別の構成要素によって、機械的に適所に固定される。次いで、棘状靭帯は、その本来の位置に再度戻される。そのようなインプラントおよび付随する外科的方法は、不都合が存在しないわけではない。これらのインプラントは、棘突起を日々の活動中の頻繁な高荷重にさらし、しばしば、棘突起の破損または低下を引き起こし得る。さらに、スペーサは、患者を、矢状面バランスの欠如に付随する長期の臨床問題に潜在的につながる分節脊柱後弯症にさせ得る。テザーを固定するプロセスは、しばしば、外科医が実施するには非常に複雑な手順であり、外科手術をより侵襲性にさせる。また、前述のように、棘間靭帯の除去は、永久的である。そのため、デバイスの適用は可逆的ではない。
【0010】
ごく近年では、侵襲性の少ない脊髄インプラントが導入されている。前述のインプラントのように、これらの脊髄インプラントは、1対以上の棘突起の上に配置され、湾曲中に生じる棘突起の広がりに対する弾性拘束を提供する。しかしながら、伸展を制限するスペーサは、使用されず、棘間靭帯は、永久的に除去されない。そのため、これらのインプラントは、侵襲性が少なく、可逆的に埋め込まれ得る。インプラントは、典型的には、テザー構造およびテザーのための固定機構を含む。テザーは、ポリエステル(PET)またはポリエチレン(例えば、超高分子量のポリエチレン、UHMWPE)織物等の可撓性ポリマー布地、マルチストランドケーブル、または他の可撓性構造から作製され得る。テザーは、隣接椎骨の突起の周りに巻きつけられ、次いで、固定機構によって固定される。固定機構は、テザーおよびストラップの指標付けに関与し得、例えば、テザーおよび固定機構は、その2つを連結する、歯、フック、ループ等の不連続界面を含む。また、非常に強力な圧着を使用して、固定機構を用いてテザーを押圧し、連結し得る。多くの公知の埋込は、止めネジの先端、または締結部のネジ山部分を用いてテザーを圧着する。しかしながら、脊髄インプラントに印加された機械力は、相互にインターフェースする、テザーおよび固定機構の特定の部分に向かって非均一に分配される。したがって、これらの部分は、典型的には、摩滅、摩耗、または他の損傷をより受けやすく、したがって、これらの脊髄インプラント全体の信頼性を低下させる。他の公知の方法は、他の構成要素を共に引き出し、圧着力を生成するためにネジまたはボルトを使用する。他の係止方法は、摩擦嵌合の使用を含み、下記により詳細に開示する。これらの方法は、潜在的に損傷させる荷重を回避し得る一方で、アセンブリの機械的複雑性は、さらに付属部品を導入することによって増大し得る。
【0011】
上述の多くの棘突起拘束デバイスの適切な埋込への鍵は、棘突起の周りに巻かれている時に、デバイスの引張または寸法を調節することである。バンドが適切に調節されていない場合には、それは、緩過ぎる可能性があり、したがって、生体構造から係脱し得る、または曲げへの適切な抵抗を提供せず、それによって、疼痛または不安定性の緩和の失敗をもたらし得る。一方、バンドがきつ過ぎる、または小さ過ぎる場合には、デバイスは、曲げへの過剰な抵抗を提供し得、脊髄分節の曲げ能力を不必要に制限し、椎骨または軟組織の部分に対して必要以上の荷重を生じ得る。したがって、棘突起デバイスの寸法/引張力を適切に調節することは必須である。デバイスは、理想的には、患者が好ましい姿勢(例えば、起立位置)にある間に規定および好ましい構造を有さなければならず、デバイスはまた、依然として脊髄分節の有意に制限されない伸展を可能にしながら、脊髄分節の曲げに抵抗する力を提供しなければならない。前述の理由のため、脊髄分節に人工装具を結合し、特に整形外科的内固定手術中に人工装具を調節するための改善された方法および装置を提供することが望ましいであろう。特に、そのような方法および装置は、実行するために容易であり、最小侵襲性でなければならない。
【背景技術】
【0012】
(2.背景技術の記述)
対象の特許および発行された明細書には、米国特許第3,648,691号、同第4,643,178号、同第4,743,260号、同第4,966,600号、同第5,011,494号、同第5,092,866号、同第5,116,340号、同第5,180,393号、同第5,282,863号、同第5,395,374号、同第5,415,658号、同第5,415,661号、同第5,449,361号、同第5,456,722号、同第5,462,542号、同第5,496,318号、同第5,540,698号、同第5,562,737号、同第5,609,634号、同第5,628,756号、同第5,645,599号、同第5,725,582号、同第5,902,305号、同第36,221号、同第5,928,232号、同第5,935,133号、同第5,964,769号、同第5,989,256号、同第6,053,921号、同第6,248,106号、同第6,312,431号、同第6,364,883号、同第6,378,289号、同第6,391,030号、同第6,468,309号、同第6,436,099号、同第6,451,019号、同第6,582,433号、同第6,605,091号、同第6,626,944号、同第6,629,975号、同第6,652,527号、同第6,652,585号、同第6,656,185号、同第6,669,729号、同第6,682,533号、同第6,689,140号、同第6,712,819号、同第6,689,168号、同第6,695,852号、同第6,716,245号、同第6,761,720号、同第6,835,205号、同第7,029,475号、同第7,163,558号、米国特許出願公開第2002/0151978号、同第2004/0024458号、同第2004/0106995号、同第2004/0116927号、同第2004/0117017号、同第2004/0127989号、同第2004/0172132号、同第2004/0243239号、同第2005/0033435号、同第2005/0049708号、同第2005/0192581号、同第2005/0216017号、同第2006/0069447号、同第2006/0136060号、同第2006/0240533号、同第2007/0213829号、同第2007/0233096号、同第2008/0009866号、同第2008/0108993、PCT国際公開WO01/28442 A1号、同WO02/03882 A2号、同WO02/051326 A1号、同WO02/071960 A1号、同WO03/045262 A1号、同WO2004/052246 A1号、同WO2004/073532 A1号、同WO2008/051806号、同WO2008/051423号、同WO2008/051801号、同WO2008/051802、および外国特許出願公開第EP0322334 A1号、および第FR2 681 525 A1号が挙げられる。脊髄分節に適用された可撓性拘束の機械的特性は、Papp et al.(1997)Spine 22:151〜155、Dickman et al.(1997)Spine 22:596〜604、およびGarner et al(2002)Eur.Spine J.S186〜S191、A1 Baz et al(1995)Spine 20,No.11,1241〜1244、Heller,(1997)Arch.Orthopedic and Trauma Surgery,117,No.1〜2:96〜99、Leahy et al.(2000)Proc.Inst.Mech.Eng.Part H:J.Eng.Med.214,No.5:489〜495、Minns et al.,(1997)Spine 22 No.16:1819〜1825、Miyasaka et al.(2000)Spine 25,No.6:732〜737、Shepherd et al.(2000)Spine 25,No.3:319〜323、Shepherd(2001)Medical Eng.Phys.23,No.2:135〜141、ならびにVoydeville et al(1992)Orthop Traumatol 2:259〜264に説明されている。
【発明の概要】
【課題を解決するための手段】
【0013】
本発明は、人工装具を脊髄分節に結合し、整形外科適内固定手術中に人工装具を調節するために使用される方法および装置に関する。これには、脊髄疼痛または他の脊髄症状を有する患者の治療が挙げられるが、それに限定されない。
【0014】
本発明の第1の側面においては、患者の脊髄分節に人工装具を結合するための方法は、脊髄分節に沿って配置される第1および第2の基準点を選択するステップと、手術前に標的距離を測定するステップとを含む。標的距離は、患者が好ましい姿勢である間に、第1の基準点と第2の基準点との間に延在する。本方法はまた、脊髄分節に人工装具を結合するステップと、標的距離に基づき、第1の基準点と第2の基準点との間の距離を設定するために、手術中に人工装具を調節するステップとを含む。
【0015】
第1の基準点は、第1の椎骨上に配置され得、第2の基準点は、椎骨または仙骨の上に配置され得る。第1の基準点はまた、第1の椎骨の第1の棘突起の上面上に配置され得、第2の基準点は、第2の椎骨の第2の棘突起の下面上に配置され得る。第1の基準点はまた、第1の椎骨の第1の棘突起の下面上に配置され得、第2の基準点は、第2の椎骨の第2の棘突起の上面上に配置され得る。第1の椎骨は、第2の椎骨の頭方に配置され得る。好ましい姿勢は、起立位置または痛みを伴わない位置を含み得る。
【0016】
標的距離を測定するステップは、患者が好ましい姿勢である間に撮影された、患者の放射線写真を観察するステップを含み得る。放射線写真は、手術前に撮影され得、脊髄分節の側面図を含み得る。人工装具は、テザー構造を含み得、結合するステップは、テザーの第1の部分を上棘突起と係合するステップと、テザー構造の第2の部分を内棘突起または仙骨と係合するステップとを含み得る。
【0017】
調節するステップは、患者が好ましい姿勢である時に、人工装具が中立位置にあり、人工装具が、依然として、脊髄分節の有意に制限されていない伸展を可能にしながら、脊髄分節の曲げに抵抗する力を提供するように、人工装具を調節するステップを含み得る。調節するステップはまた、患者が好ましい姿勢以外の位置である間に、人工装具を調節するステップ、または人工装具上の較正マーキングを観察するステップを含み得る。調節するステップはまた、第1の基準点と第2の基準点との間の距離を標的距離に設定するステップを含み得る。
【0018】
本方法は、第1の基準点と第2の基準点との間の距離が標的距離に実質的に一致することを確認するステップをさらに含み得る。確認するステップは、第1の基準点と第2の基準点との間の距離を決定するためにゲージを使用するステップを含み得る。本方法はまた、第1の基準点と第2の基準点との間の距離が標的距離に実質的に一致するまで、人工装具を再調節するステップをさらに含み得る。
【0019】
人工装具は、第1のコンプライアンス要素(compliance element)を備え、本方法は、人工装具の調節中に、その伸展または収縮を制限するために、第1の拘束装置を第1のコンプライアンス要素と係合し、係止するステップをさらに含み得る。第1の拘束装置は、その移動を可能にするように、第1のコンプライアンス要素から係脱され得る。人工装具はまた、第2のコンプライアンス要素を備え得、本方法は、人工装具の調節中に、その伸展または収縮を制限するために、第2の拘束装置を第2のコンプライアンス要素と係合するステップを含み得る。第1および第2の拘束装置は、脊髄分節の正中線の対向側の第1および第2のコンプライアンス要素の整列および位置付けを容易にするように結合され得る。第1の拘束装置は、様々な厚さの棘突起または正中線靭帯(例えば、棘間靭帯および棘上靭帯)に適応するために、1つの自由度に沿って第2の拘束装置に対して移動させられ得る。ドライバまたはツールは、第1または第2の拘束装置の中心管腔内に位置付けられ、それによって、コンプライアンス要素上の係止機構を用いてドライバまたはツールを同心円状に整列させ得る。拘束装置を使用して、第1または第2のコンプライアンス要素が調節される時、または第1または第2の拘束装置が共に解放可能に係止される時に、反対トルクを提供し得る。人工装具は、所望の値までプレテンションを加えられ得る。
【0020】
標的距離は、長軸長を画定し、調節するステップは、標的人工装具円周を決定するために標的距離を使用するステップと、標的円周に人工装具を調節するステップとを含む。長軸長は、参照テーブル内の標的円周または人工装具上の較正マーキングと相関し得る。
【0021】
本方法はまた、人工装具円周が標的円周に実質的に一致することを確認するステップを含み得る。人工装具円周を確認するステップは、人工装具上の較正マーキングを観察するステップを含み得る。人工装具は、人工装具円周が標的円周に実質的に一致するまで再調節され得る。
【0022】
本方法はまた、脊髄分節に沿って配置される、第3および第4の基準点を選択するステップを含み得る。第3および第4の基準点の間の距離は、短軸長を有する短軸を画定し、短軸は、長軸に対して直角である。本方法はまた、標的人工装具円周を決定するために、手術前画像上の短軸長を測定するステップを含み得る。標的円周は、人工装具において、上棘突起および下棘突起を包囲するループを形成するために十分である。人工装具は、所望の姿勢を超えた曲げに抵抗する力を提供し得る。第3および第4の基準点は、棘突起についての対向側にあり得、棘突起幅に適応する必要がある、人工装具の長さを推定し得る。第3および第4の基準点は、単一の椎骨上に配置され得る。短軸長は、参照テーブル内の標的円周と相関し得るか、または短軸長は、人工装具上の較正マーキングと相関し得る。本方法はさらに、脊髄分節の一部分を減圧するステップを含み得る。
【0023】
本発明の別の側面においては、患者の脊髄分節の曲げを制限するためのシステムは、上棘突起、および下棘突起または仙骨と結合されるように適合される、テザー構造と、テザー構造と結合される、第1のコンプライアンス要素とを備える。本システムはまた、コンプライアンス要素を所望の位置に保持するように、またはコンプライアンス要素の運動を規定の範囲に制限するように、コンプライアンス要素と解放可能に結合される、第1の拘束ツールを含む。テザー構造は、実質的に非伸張性であり得、第1の拘束ツールは、細長いシャフトを備え得る。第1の拘束ツールは、第1のコンプライアンス要素を解放可能に保持するように適合される、クレードルを備え得る。第1の拘束ツールはまた、第1のコンプライアンス要素を解放可能に保持するためのレセプタクルを形成し、コンプライアンス要素の伸長を拘束する、複数の細長いアームを備え得る。第1のツールは、第1のコンプライアンス要素を所望の緊張状態に保持し得る。圧縮力は、可変であり得る。
【0024】
第1の拘束ツールは、第1のコンプライアンス要素が規定の距離に延在するまで、第1のコンプライアンス要素の伸展を制限し得ない。第1の拘束ツールは、所望の位置、引張力、または範囲を変化させるように調節可能であり得る。本システムはまた、テザー構造と結合される、第2のコンプライアンス要素と、第2の拘束ツールとを備え得る。第2のツールは、第2のコンプライアンス要素を所望の位置に保持するように、または第2のコンプライアンス要素の動作を規定の範囲に制限するように、第2のコンプライアンス要素と解放可能に結合され得る。第1および第2の拘束ツールは、脊髄分節の正中線の対向側の第1および第2のコンプライアンス要素の整合および位置付けを容易にするように、解放可能かつ対称的に共に結合され得る。第1および第2の拘束ツールは、1つの自由度に沿って、相互に対して移動可能であり、それによって、様々な厚さの棘突起または正中線軟組織に適応し得る。第1または第2のコンプライアンス要素は、係止機構を備え得、第1または第2の拘束ツールのうちの少なくとも1つは、係止機構を用いて同心円状にドライバまたは他のツールを受容し、整列させるように適合される管腔を有する細長いシャフトを備え得る。第1または第2のコンプライアンス要素は、第1または第2の拘束ツールを用いて解放可能に係止する。第1または第2の拘束ツールはまた、係止機構が作動させられると、反対トルクを提供するように適合され得る。
【0025】
本発明の別の側面においては、患者の背下部痛を治療するための方法は、背下部を様々な曲げ位置に配置するように患者に指示を提供するステップと、患者が背下部痛を経験しない、または背下部痛が軽減される、背下部の閾値位置を決定するステップとを含み得る。閾値位置にある間の患者の背下部の第1の画像または一組の画像を提供し、患者の背下部の特徴は、第1の画像または一組の画像を使用して測定される。拘束デバイスは、患者の背下部に結合し、それに結合された拘束デバイスによって、背下部の特徴は、再測定される。再測定された特徴は、測定された特徴と比較され、患者の背下部が、測定された特徴と再測定された特徴との比較に基づく閾値位置より下の位置にあるように調節される。したがって、背下部痛または背下部の不安定性が軽減されるか、または排除される。
【0026】
決定するステップは、疼痛が経験される時を示すための手段を患者に提供するステップを含み得る。本手段は、作動可能なスイッチを備え得る。第1の画像または一組の画像は、X線、MRI、およびCTスキャンのうちの1つを含み得る。提供するステップは、疼痛を感じる姿勢と疼痛を感じない姿勢または疼痛が軽減された姿勢との間の患者の背下部の単一の連続動作から、一組の画像を取得するステップを含み得る。
【0027】
測定された特徴は、椎骨板間の角度、棘突起間の距離、および弓根間の距離のうちの1つを含み得る。測定するステップは、特徴を定量化するためにキャリパまたは角度測定デバイスを使用するステップを含み得る。
【0028】
結合するステップは、拘束デバイスを上棘突起および下棘突起または仙骨と係合するステップを含み得る。拘束デバイスは、背下部の曲げに抵抗する力を提供するように適合され得る。
【0029】
再測定するステップは、それに接合された拘束デバイスによって、患者の背下部の第2の画像または一組の画像を提供するステップを含み得る。第2の画像または一組の画像は、X線、MRI、またはCTスキャンのうちの1つを含み得る。再測定するステップは、1つ以上の放射線不透過性マーカーを患者の背下部と係合するように配置するステップを含み得る。放射線不透過性マーカーは、患者の背下部の棘突起と結合し得る。比較するステップは、第1および第2の放射線画像または複数組の画像を視覚的に比較するステップを含み得る。調節するステップは、拘束デバイスにおける長さまたは引張力を調節するステップを含み得る。
【0030】
本方法はさらに、それに拘束デバイスを結合するための、背下部の棘突起の存在および形状を評価するステップを含み得る。背下部内の面関節係合はまた、評価され得る。評価するステップは、面関節の関節突起の線形重複を測定するステップを含み得る。拘束デバイスを調節するステップは、背下部内の少なくとも1つの面関節における面関節係合を増大させるように、拘束デバイスを調節するステップを含み得る。調節するステップはまた、背下部内の少なくとも1つの面関節の過伸展または係止を防止するように、拘束デバイスを調節するステップを含み得る。本方法はさらに、背下部が測定および再測定された特徴の比較に基づく閾値位置の位置に、またはそれより下の位置にあるように、患者の背下部を手術中に操作するステップを含み得る。操作するステップは、その中で脊柱前弯症を形成または増大するように、患者の背下部を操作するステップを含み得る。
【0031】
本発明の別の側面においては、患者の背下部の変性脊椎すべり症を治療するための方法は、背下部を様々な曲げ位置に配置するように患者に指示を提供するステップと、様々な位置の背下部の複数の画像を提供するステップとを含み得る。患者の背下部内の面関節が亜脱臼し始める、背下部の閾値位置が決定され、次いで、閾値位置にある間の患者の背下部の第1の画像が提供される。拘束デバイスを患者の背下部に結合し、拘束デバイスが患者の背下部に結合された後に、手術中に患者の背中の第2の画像を提供する。第1および第2の画像を比較し、患者の背下部が第1および第2の画像の比較に基づく閾値位置より下の位置にあるように、拘束デバイスを調節する。したがって、関節の亜脱臼は、低減または排除される。
【0032】
決定するステップは、作動可能なスイッチ等の疼痛が経験される時を示すための手段を患者に提供するステップを含み得る。決定するステップはまた、尾椎骨に関して、面関節の係合または頭蓋椎骨の前方並進に抵抗する面関節の能力を評価するステップを含み得る。
【0033】
第1の画像は、X線、MRI、またはCTスキャンのうちの1つを含み得る。結合するステップは、拘束デバイスを上棘突起および下棘突起または仙骨と係合するステップを含み得る。拘束デバイスは、背下部の曲げに抵抗する力を提供するように適合され得る。第2の画像は、X線、MRI、またはCTスキャンを含み得る。1つ以上の放射線不透過性マーカーを患者の背下部と係合するように配置し得る。配置は、放射線不透過性マーカーを患者の背下部の棘突起と結合するステップを含み得る。
【0034】
比較するステップは、第1および第2の画像、または複数の組の画像間の椎骨版間の角度、棘突起間の距離、面関節係合、または弓根間の距離を比較するステップを含み得る。比較するステップはまた、第1および第2の画像の背下部の特徴を定量化するためにキャリパまたは角度測定デバイスを使用するステップを含み得る。第1および第2の画像は、視覚的に比較され得る。
【0035】
調節するステップは、拘束デバイスにおける長さまたは引張力を調節するステップを含み得る。本方法はまた、それに拘束デバイスを結合するための、背下部の棘突起の存在および形状を評価するステップを含み得る。
【0036】
本発明の別の側面においては、患者の背下部痛を治療するための方法は、背下部痛が軽減または排除される位置に患者の背下部を操作するステップと、その位置を記録するステップとを含む。患者の背下部においてその位置を手術中に再現し、拘束デバイスを背下部に結合する。
【0037】
操作するステップは、患者の背下部を手動で操作するステップと、患者の背下部において脊柱前弯症を形成または増大するステップとを含み得る。操作するステップはまた、調節可能な腰部部材を伴う枠または椅子に患者を配置するステップと、股関節を曲げさせるステップとを含み得る。股関節を曲げさせるステップは、骨盤を前傾させるように、大腿骨頭を通して近位方向に力を方向付け、それによって、患者の背下部において脊柱前弯症を形成または増大するステップを含み得る。膝は、拘束され得る。
【0038】
記録するステップは、作動可能なスイッチ等の疼痛が経験される時を示すための手段を患者に提供するステップを含み得る。再現するステップは、患者の背下部をその位置に手動で操作するステップ、または患者の背下部において脊柱前弯症を形成または増大するステップを含み得る。結合するステップは、拘束デバイスを上棘突起および下棘突起または仙骨と係合するステップを含み得る。拘束デバイスは、背下部の曲げに抵抗する力を提供するように適合され得る。
【0039】
本方法はさらに、その位置にある患者の背下部の画像を提供するステップを含み得る。画像は、X線、MRI、またはCTスキャンを含み得る。本方法はまた、位置を再現した後に、患者の背下部の手術中画像を提供するステップを含み得る。手術中画像は、X線、Cアーム蛍光透視法、MRI、およびCTスキャンのうちの1つを含み得る。放射線不透過性マーカーは、棘突起等の患者の背下部と結合され得る。本方法はさらに、患者の背下部の分節の可動域、分節安定性、線形剛性、または曲げ剛性を手術中に特徴付けるステップを含み得る。拘束デバイスは、患者の背下部の特徴付けに基づき調節され得る。調節するステップは、拘束デバイスにおける長さまたは引張力を調節するステップを含み得る。また、患者の背下部の特徴付けは、参照ガイドと比較され得、拘束デバイスは、参照ガイドによって提供される情報に基づき調節され得る。
【0040】
本発明のさらに別の側面においては、患者の脊椎すべり症を治療するための方法は、背下部を様々な曲げ位置に配置するように患者に指示を提供するステップと、患者が並進不安定性を経験しないか、または並進不安定性が軽減される、背下部の閾値位置を決定するステップとを含む。患者の背下部の第1の画像または一組の画像は、患者が閾値位置にある間に提供され、患者の背下部の特徴は、第1の画像または一組の画像から測定される。拘束デバイスを患者の背下部に結合し、それに結合された拘束デバイスによって患者の背下部の特徴を再測定する。再測定された特徴を、測定された特徴と比較し、患者の背下部が、測定および再測定された特徴の比較に基づく閾値位置より下の位置にあり、それによって、背下部の不安定性が軽減または排除されるように、拘束デバイスを調節する。
【0041】
これらおよび他の実施形態を付属の図面に関連する以下の説明において、さらに詳細に説明する。
【図面の簡単な説明】
【0042】
【図1A】図1Aは、脊椎の腰部領域の概略図である。
【図1B】図1Bは、矢状平面に沿って切り取った、脊椎の腰部領域の一部分を示す斜視図である。
【図2】図2は、米国特許第2005/0216017A1号に説明する種類の脊髄インプラントを図示する。
【図3】図3A−3Bは、棘突起を周囲する、さらなる組織を図示する。
【図4A】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4B】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4C】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4D】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4E】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4F】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4G】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4H】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4I】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4J】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4K】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4L】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図4M】図4A−4Mは、脊髄デバイスを外科的に埋め込むための例示的方法を示す。
【図5A】図5A−5Bは、異なる基準点を強調する、脊椎の腰部領域の側面図を示す。
【図5B】図5A−5Bは、異なる基準点を強調する、脊椎の腰部領域の側面図を示す。
【図6】図6A−6Bは、脊椎の腰部領域の簡略した前後図の図5A〜5Bの基準点を図示する。
【図7】図7A−7Bは、人工装具円周を推測するために使用され得る、複数の基準点を強調する、脊椎の腰部領域の簡略した前後図を図示する。
【図8】図8A−8Bは、棘突起拘束デバイス上の較正マーキングの例示的実施形態を図示する。
【図9A】図9A−9Cは、拘束ツールの例示的実施形態を図示する。
【図9B】図9A−9Cは、拘束ツールの例示的実施形態を図示する。
【図9C】図9A−9Cは、拘束ツールの例示的実施形態を図示する。
【図10A】図10A−10Cは、拘束ツールの別の例示的実施形態を図示する。
【図10B】図10A−10Cは、拘束ツールの別の例示的実施形態を図示する。
【図10C】図10A−10Cは、拘束ツールの別の例示的実施形態を図示する。
【図11】図11A−11Cは、異なる姿勢にある患者の脊椎の曲率を図示する。
【図12】図12A−12Bは、脊椎後弯症および脊柱前弯症の脊髄運動分節を図示する。
【図13】図13A−13Bは、変性脊椎すべり症を有する脊髄運動分節を図示する。
【図14】図14A−14Bは、異なる姿勢の患者を図示する。
【図15】図15A−15Bは、脊椎後弯症および脊柱前弯症の脊髄運動分節を図示する。
【図16】図16A−16Cは、患者の背下部への腰力の印加を図示する。
【図17】図17は、様々な脊髄分節の特徴の測定を図示する。
【図18】図18は、様々な条件下の椎骨間の角度と分節曲げモーメントとの間の関係を図示する。
【図19】図19A−19Bは、総合腰運動に対する様々な条件下の総合腰運動への分節寄与を図示する。
【図20】図20は、下背部痛を診断し、かつ治療するための例示的アルゴリズムを図示する。
【図21A】図21A−21Cは、2つのコンプライアンス要素を拘束するための例示的ツールを図示する。
【図21B】図21A−21Cは、2つのコンプライアンス要素を拘束するための例示的ツールを図示する。
【図21C】図21A−21Cは、2つのコンプライアンス要素を拘束するための例示的ツールを図示する。
【図22】図22は、例示的コンプライアンス要素を図示する。
【発明を実施するための形態】
【0043】
図1Aは、棘突起(SP)、面関節(FJ)、層(L)、横突起(TP)、および仙骨(S)を含む、脊椎の腰領域を図示する、概略図である。図1Bは、矢状平面に沿って切り取った脊椎の腰領域の一部分を示し、本開示において、しばしば使用される、「中立位置」、「曲げ」、および「伸展」という用語を提示するために有用である。
【0044】
本明細書に使用する時、「中立位置」は、患者の脊椎がくつろいだ起立位置で休む位置を指す。「中立位置」は、患者によって異なるであろう。通常、そのような中立位置は、脊椎がわずか前方に凸性、およびわずか後方に凹性を有する、腰椎のわずかな曲率または脊柱前弯症によって特徴付けられるであろう。一部の場合においては、本発明の拘束の存在は、中立位置を修正し得る、例えば、デバイスは、未治療の脊椎の一部の伸展を有する、「新規」の中立位置を画定する、初期力を印加し得る。したがって、「中立位置」という用語の使用は、デバイスの存在、または不在の中で使用されるものである。本明細書に使用する時、「脊髄分節の中立位置」は、脊椎が中立位置にある時の脊髄分節の位置を指す。
【0045】
さらに、本明細書に使用される時、「曲げ」は、患者が前屈する時の脊髄分節の隣接椎骨間の運動を指す。図1Bを参照すると、患者が脊椎の中立位置から、すなわち、湾曲軸Aに対して右に前屈すると、椎骨板間Dの前方部分が圧縮されるように、前方側面の個々の椎骨L間の距離は減少する。対照的に、後方側面の個々の棘突起SPは、矢印Bで示す方向に離れるように移動する。したがって、曲げは、患者が図1Bに図示する中立位置から前屈するときの隣接椎骨間の相対的動作を指す。
【0046】
また、本明細書に使用する時、「伸展」は、患者が後屈し、脊椎が図1Bに図示する中立位置から延在するときの個々の椎骨L間の運動を指す。患者が後屈すると、個々の椎骨の後方端部は、離れるように移動する。隣接椎骨上の個々の棘突起SPは、矢印Bで示す方向とは反対の方向に相互により接近する。
【0047】
図2は、関連する米国特許第2005/02161017A1号に説明する種類の脊髄インプラントを示し、その全体の内容は、参照により本明細書に組み込まれる。図2に図示するように、インプラント10は、典型的には、一対のコンプライアンス要素16によって接合される、上部ストラップ構成要素12および下部ストラップ構成要素14を有するテザー構造を備える。上部ストラップ12は、L4の棘突起SP4の上部上に配置して示す一方、下部ストラップ14は、L5の棘突起SP5の底部上に延在して示す。コンプライアンス要素16は、ストラップ12および14に取り付けられるバネまたはゴムブロック等の内部要素を含み、典型的には、棘突起SP4およびSP5が曲げ中に離れるように移動すると、ストラップが「弾力的」または「追従的に」に引き離されるように取り付けられている。このように、インプラントは、曲げに抵抗する力を提供する弾性引張力を棘突起上に提供する。力は、突起がさらに離れるように移動すると増加する。通常、ストラップ自体は、本質的に非追従的であって、弾性率またはコンプライアンスは、コンプライアンス要素16によってのみ制御され、提供される。
【0048】
図3Aは、椎骨本体Vを分離する、椎間板Dを有する脊椎の腰領域の側面図である。棘状靭帯SSLは、棘突起SPの後方部分に沿って走り、棘間靭帯ISLならびに多裂腱および筋肉Mは、棘突起SPと平行して走り、そこに取り付けられる。図3Bは、図3Aの後方図である。
【0049】
図4A〜4Mは、図2の実施形態等の棘突起拘束を移植する例示的外科方法を図示する。脊髄インプラントを外科的に埋め込む第1のステップのうちの1つは、対象の脊髄領域にアクセスするために切開部を作成することである。図4Aは、切開部Iが患者の皮膚を通過して作成された後の背部Kの腰領域を示す。図4Bは、切開部Iが患者の皮膚を通過して作成された後の脊椎の腰領域を図示する。多烈筋および腱Mは、棘突起を露出するために収縮ツールTRで収縮させられている。
【0050】
切開部が作成された後に、棘状靭帯SSLを回避しながら、棘間靭帯ISLにアクセスし、穿孔するために先細りの遠位端を有する穿孔ツールTを使用し得、対象の第1の棘突起SSPの上の棘間靭帯穿孔P1を作成する。穿孔ツールTの例示的実施形態は、米国特許第12/478,953号(代理人整理番号第026398〜000610US)に開示されており、その全体の内容は、参照により本明細書に組み込まれる。この外科的アプローチは、それが棘状靭帯を無傷に維持し、多裂筋および腱、ならびに他の側副靭帯への損傷を最小化するため望ましい。図4Cに示すように、ツールTは、脊椎の右側面から、対象の第1の棘突起SSPに隣接する棘間靭帯ISLにアクセスし、かつ穿孔する。ツールTの遠位端を点線で示す。あるいは、ツールTは、代わりに、左側面から棘間靭帯ISLにアクセスし、かつ穿孔し得る。ツールTの遠位端はテザー102と結合され、その部分もまた、点線で示す。棘間靭帯ISLにアクセスし、かつ穿孔する他に、穿孔ツールTはまた、前進するか、または穿孔P1を介してテザー102にネジ山を付ける。図4Dに示すように、次いで、ツールTは、穿孔P1を通ってテザー102を位置付けたまま、取り外される。多裂腱および筋肉Mは、他の要素をより明確に示すように、図4Cおよび4Dにおいて図示しない。
【0051】
図4Eは、上記のステップが実行された後の脊椎の区画の後方図である。しばしば、ツールTの遠位先端TIは、着脱可能である。図4Eに示すように、遠位先端TIを用いて、ツールTが棘間靭帯ISLにアクセスし、かつ穿孔した後に、遠位先端TIは、ツールTから着脱され、対象の第1の棘突起SSPの上の穿孔P1(点線で示す)内の適所に残される。テザー102は、先端TIに遅行する。一部の場合では、遠位先端TIは、棘間靭帯ISLを完全に穿孔し得る。これらの場合においては、遠位先端TIは、棘間靭帯ISLを通過している一方、テザー102の一部分は、穿孔P1の適所に残されたままである。
【0052】
先端TIまたはテザー102aの一部分が穿孔P1の適所に残された後に、別のツールは、図4Fに示すように、それが、テザー102aおよびコンプライアンス要素104aを脊椎に対する適切な位置まで引っ張るように、先端TIに結合され、先端TIを引っ張り得る。コンプライアンス要素104aは、テザー102aに結合され、棘突起SPの曲げに抵抗する力を提供するために使用される。コンプライアンス要素104aは、締結機構または締結要素106aを含み、バネ、引張部材、圧縮部材、または同等物備え得る。関連するコンプライアンス要素は、共同所有の米国特許第12/106,103号(代理人整理番号第026398〜000410US)に説明されており、その全体の内容は、参照により本明細書に組み込まれる。
【0053】
ISLにアクセスするステップ、ISLを穿孔するステップ、およびテザー102にネジ山を付けるステップは、次いで、対象の第1の上脊髄突起SSPの下の隣接する棘突起ISPのための脊椎の対向する外側面で繰り返される。図4Gおよび4Hに示すように、ツールTは、脊髄正中線の左側面から棘間靭帯にアクセスし、棘間靭帯ISLを穿孔し、下棘突起ISPと標識される対象の第2の棘突起の下部に位置する、第2の穿孔P2を作成する。当業者は、穿孔ステップがまた、反対方向から実施し得ることを理解するであろう。図4Gに示すように、対象の下棘突起ISPは、対象の第1の上棘突起SSPに直接隣接し、その下にある。しかしながら、上棘突起SSPの代わりに下棘突起ISPで開始される説明した手順を実行することは完全に可能であり、例えば、穿孔P2を穿孔P1の前に作成し得る。対象の棘突起間に1つ以上の棘突起SPの間隙があり得ることも可能である。多裂腱および筋肉Mは、他の示す要素を明確にするために、図4Gおよび4Hにおいて図示しない。
【0054】
図4H、4Iおよび4Jに示すように、第1の穿孔するステップと併せて示すステップと同様に、テザー102bは、穿孔P2を通って穿孔され、ツールTの遠位先端TI(図4Iに最も良く示す)とともに適所に残される。図4Jに示すように、次いで、一対の鉗子等の他のツールを使用して、遠位先端TIを保持し、テザー102bおよびコンプライアンス要素104bを脊椎に対して適所に引っ張る。棘突起SPの対向側の対向するコンプライアンス要素104aおよび104bは、反対方向に配向される。各コンプライアンス要素104a、104bは、それぞれの各テザー102a、102bに結合され、かつ対応する締結機構または締結要素106a、106bを有する。締結機構106a、106bは、対向するコンプライアンス要素104a、104bのテザー102a、102bに結合するように構成される。締結機構の例示的実施形態に関するさらなる詳細は、米国特許第12/479,016号(代理人整理番号第026398〜000710US)および米国仮特許出願第61/059,543号(代理人整理番号第026398〜000800US)に開示されており、その全体の内容は、参照により本明細書に組み込まれる。例えば、図4Kに示すように、テザー102aは、コンプライアンス要素104bに係合し、次いで、締結機構106bを用いて、そこに解放可能に結合される。同様に、テザー102bはまた、コンプライアンス要素104aに係合し、締結機構106aを用いて、そこに解放可能に結合される。その配向を除き、コンプライアンス要素104aおよび104bは、同一である。当業者は、多くの異なる方向および構成で、テザーが締結機構に進入し、そこから出ること、および図4Kが単に1つの例示的実施形態であることを理解するであろう。
【0055】
締結機構106は、ドライバ特性108を備え得る。図4Lに示すように、ドライバ特性は、回転ドライバツールRTを受容するように適合される。ドライバ特性は、Phillipsヘッド、溝付きフラットヘッド、Torxヘッド、六角形ヘッド、または同等物であり得る。時計回りまたは反時計回りのいずれかであり得る、ツールRTの回転は、テザー102を適所に係止し、固定するように、締結機構106の構成を変更する。これは、図4Mに示すように、2つの棘突起SPを共に結合する、連続的多構成要素のテザー構造または拘束110を形成する。コンプライアンス要素104a、104bを使用して、棘突起SP間の曲げを制御する一方、テザー102a、102bおよび各締結機構106a、106bは、棘突起SPを共に結合するステップに寄与する。穿孔P1およびP2の位置、ならびにコンプライアンス要素104a、104bの長さによって、拘束110は、2つ以上の棘突起SPを共に結合し得る。一般に、コンプライアンス要素104a、104bは、脊椎に一般に平行する軸のテザー102a、102bを介して力が印加されると、弾力的に伸張するバネ状の要素を備える。棘突起または棘突起および仙骨が拘束された脊髄分節の曲げ中に離れるように移動すると、上テザー102aおよび下テザー102bもまた、離れるように移動する。コンプライアンス要素104a、104bはそれぞれ、バネ状要素の機械的特性によって決定された力を用いて、広がりに対して弾力的に抵抗するバネ状要素を含む。したがって、拘束110は、中立位置を越える脊髄分節の曲げに対する弾性抵抗を提供する。拘束110は、しばしば、7.5N/mm〜20N/mmの範囲の抵抗を提供するように構成されるが、その抵抗は、3N/mm以下、またはさらには0.5N/mm以下であり得る。拘束110はまた、脊髄分節が中立位置にある時に、棘突起または棘突起および仙骨にわたって締め付けを可能にするように特定の寸法で調節可能であり得る。他の関連するテザーの実施形態および接合方法は、米国特許第12/106,103号(代理人整理番号第026398〜000410US)、米国特許第2008/0009866号(代理人整理番号第026398〜000140US)、米国特許第2008/0108993号(代理人整理番号第026398〜000150US)、米国仮特許出願第60/936,897号(代理人整理番号第026398〜000400US)に開示されており、その全体の内容は、参照により本明細書に組み込まれる。
【0056】
図4A〜4Mの棘突起拘束デバイスが背部痛および/または脊髄の不安定な位置を効果的に低減させるために、拘束デバイスは、疼痛を感じる位置または不安定な位置を防止するか、または制限するように寸法決定されなければならず、例えば、拘束は、依然として脊髄分節の有意に制限されていない伸展を可能にしながら、脊髄分節の曲げに抵抗する力を提供しなければならない。したがって、医師は、脊髄分節に対して拘束装置を結合し、かつ調節するための方法および装置を必要とする。
【0057】
図5Aは、棘突起SPおよび椎骨の間に配置される椎間板Dを有する腰椎骨L3〜L5を含む、脊椎の腰領域の一部分の側面図を図示する。拘束デバイスの適切な寸法を決定する1つの例示的方法は、放射線画像等の罹患した脊髄分節の手術前の画像を入手するステップに関与する。放射線画像は、脊髄分節がデバイスの最終的に所望の中立位置にあるように、患者が所望の姿勢、好ましくは、疼痛を感じない姿勢にある間に撮影される。放射線画像から、2つの基準点を選択し、これらの基準点を使用して、拘束デバイスが調節されるべき寸法を推測する。また、放射線画像における拡大および歪み効果の決定に役立つために放射線画像を使用し得る。基準点との間の距離を測定するために尺度を放射線画像に使用し得、医師は、拡大および/または画像の歪みを補正し得る。好ましい実施形態においては、第1の基準点A1は、第1の椎骨に結合される第1の棘突起SPの上面上で選択され、第2の基準点A2は、第2の椎骨に結合される第2の棘突起SPの下面上で選択される。第2の椎骨は、患者が起立位置にある時に、第1の椎骨の下になる。点A1とA2との間の長さは、図5Aの矢印に示す標的距離を画定する。したがって、拘束デバイスが脊髄分節に適用されると、それは、基準点A1とA2との間の距離が手術前の標的距離に戻るまで、手術中に調節され得る。これは、患者が起立している時に拘束デバイスが中立位置にあるが、依然として脊髄分節の有意に制限されていない曲げを可能にしながら、脊髄分節の曲げに抵抗する力を提供することを保証するために役立つ。標的距離は、キャリパ、定規、デジタル放射線画像測定、または他の好適なゲージを用いて測定され得る。基準点A1とA2との間の距離が測定され、調節された後に、確認ステップは、外科手術を完了する前に、適切な距離が維持されていることを保証するために実施され得る。距離が標的値から変更されている場合には、外科医は、2つの基準点A1とA2との間の距離を標的距離に近付けるように、拘束デバイスを再調節して棘突起を再位置付けし得る。この微調節および再調節は、必要に応じて反復し得る。図6Aは、図5Aに見られる脊髄分節の簡略化された前後図を図示する。標的距離はまた、側面の放射線画像の代わりに、またはそれと併せて、前後の放射線画像を使用して推定し得る。
【0058】
別の好ましい実施形態においては、2つの基準点は、棘突起の異なる領域に沿って位置し得る。例えば、図5Bは、図5Aの脊髄分節と同一の図を図示するが、ここでは、第1の基準点B1は、第1の椎骨に結合される、第1の棘突起の下面に沿って位置し、第2の基準点B2は、第2の椎骨に結合される、棘突起の上面に沿って位置する。第2の椎骨は、患者が起立位置にある時に、第1の椎骨の下になる。点B1とB2との間の手術前の長さを入手するために、患者が起立位置等の好ましい姿勢にある間の脊髄分節の放射線画像または他の画像を使用し得、これは、図5Bの矢印で示す標的距離を画定するために使用される。この長さを使用して、図5Aを参照して前述した方法と同様の方法で、拘束デバイスの調節を制御し得る。図5Bに図示する基準点を使用する1つの利点は、図5Aの基準点の間の距離を測定するよりも、手術中にこの距離を測定するためにキャリパ、定規、ゲージピン、または寸法決定するブロックを使用することが容易であり得ることである。図5Bにおいては、この距離は、図5Bの「外側」寸法とは対照的に、「内側」寸法であり、したがって、一貫した位置において測定することがより容易であり得る。調節、確認、および再調節はまた、上述のように実施し得る。図6Bは、図5Bに図示する脊髄分節の簡略化された前後図を図示する。標的距離はまた、側面の放射線画像の代わりに、またはそれと併せて、前後の放射線画像を使用して推測され得る。拘束デバイスが標的値に設定されると、デバイスの任意のさらなる調節は、医師が所望のプレテンション値を設定することを可能にする。さらに別の実施形態においては、測定された距離は、両方の棘突起の上面間の距離であり得る。
【0059】
寸法決定アルゴリズムの別の実施形態は、罹患した脊髄分節の手術前の放射線画像から、棘突起拘束デバイスの円周を推定する。図7Aは、脊椎の腰領域の一部分の前後図を図示する。これは、棘突起SPおよび椎骨Dの間に配置される椎間板を有する、腰椎骨L3〜L5を含む。棘突起拘束デバイスSPDは、2つの棘突起SPを包囲する。この実施例においては、2つの棘突起は、相互に隣接するが、他の実施形態においては、1つ以上の棘突起は、棘突起拘束デバイスが結合される、2つの棘突起の間に配置され得る。第1の対の基準点は、それに棘突起拘束デバイスが調節されなければならない、円周を推定に役立つように、手術前の放射線画像上で選択され得る。図7Aにおいては、第1の基準点C1は、第1の椎骨に結合される第1の棘突起の上面またはそのわずか上に配置され、第2の基準点C2は、第2の椎骨に結合される第2の棘突起の下面またはそのわずか下に配置される。第1の椎骨は、患者が起立位置にある時に、第2の椎骨の頭方、またはその上になる。基準点C1およびC2は、長軸を画定し、長軸長を有する。長軸長は、キャリパ、定規、または、上述の技術等を含む他の測定技術を使用して、放射線画像から測定され得る。また、医師は、放射線画像における歪みまたは拡大を説明するために、測定結果を調節し得る。長軸は、図7Bにおいて、C1およびC2を通って延在する垂直の点線で示される。長軸長はまた、罹患した脊髄分節の側面図から推定され得る。棘突起拘束デバイスSPDの円周は、主要軸長と、上部および下部棘突起の頂点の周りに巻き付く拘束デバイスに適応する定数の二倍と推定され得る。この定数は、患者の身体(例えば、身長、体型等)の他の特性に基づき、放射線画像から測定される、または、参照テーブルから入手され得る。
【0060】
第2の対の基準点はまた、任意に、棘突起拘束デバイスSPDの調節された寸法の推定にさらに役立つように、手術前放射線画像上で選択され得る。図7Aにおいては、基準点D1およびD2は、その周りを拘束デバイスSPDが包囲する、棘突起SPの1つのいずれかの側面上で取得される。図7Aは、下棘突起のいずれかの側面のD1およびD2を示すが、それらはまた、上棘突起のいずれかの側面に位置し得る。基準点D1およびD2は、長軸に対して直角であり、短軸長を有する短軸を画定する。短軸は、図7Bにおいて、点D1およびD2を通って延在する、点線で図示される。短軸長は、長軸長と同様に測定され得る。
【0061】
長軸長および任意の短軸長が、手術前の放射線画像または他の手術前の画像から測定されると、棘突起拘束デバイスの円周を推定し得る。棘突起拘束デバイスの円周は、長方形として推定され得、したがって、長軸長の二倍と、短軸長の二倍であると計算される。拘束デバイスの円周はまた、卵形または楕円の円周を計算すること等によって、他のモデルを使用して推定され得る。さらに、長軸長および短軸長は、拘束デバイスの円周に相関し得、参照テーブルは、使用するための対応する調節寸法を提供し得る。拘束デバイスが棘突起の周りに埋め込まれると、その寸法は、その円周が計算された値または参照テーブルによって提供された値に一致するまで、調節される。拘束デバイスの円周は、直接測定され得るか、または拘束デバイス上の較正マーキングを使用して、拘束デバイスの寸法を示し得る。拘束デバイスの寸法が、標的値に設定されると、デバイスの任意のさらなる調節は、医師が所望のプレテンション値を設定するのを可能にする。
【0062】
図8A〜8Bは、デバイスにおける長さまたは周辺の推定に役立つように、棘突起拘束デバイス上に含まれ得る、較正マーキングの例示的実施形態を図示する。図8Aにおいては、棘突起拘束デバイス400のテザー部分402を図示する。テザーの先端404は、角度を付けて切断され、対向端部406は、係止機構(図示せず)を有するコンプライアンス要素で結合され得る開口部を形成するように、それ自体に対して折り畳まれ、固定される。先端上の角度は、2つ以上のデバイスが共に結合される時に、端部がこの棘突起拘束デバイスまたは他の棘突起拘束デバイスの係止機構内に容易に挿入されるのを可能にする。較正マーキング408は、印刷、エッチング、またはさもなければ、デバイスのテザー部分402に装着され得る。較正マーキング408は、相互から公知の距離で離間させられ得るか、または数はまた、読み込みを容易にするためにマーキングとともに含まれ得る。較正マーキングは、テザー長または円周、または医師が、手術前の起立位置の放射線画像から推定された標的値までテザーを調節するのを可能にする別のパラメータを示し得る。図8Bは、図8Aの拡大図である。
【0063】
デバイスにおける長さまたは周辺を推定するステップの他に、疼痛が経験される閾値位置を確立するために、様々な位置の患者の下部の腰椎を特徴付けることも所望であり得る。この閾値位置が決定されると、拘束デバイスは、患者の脊椎に適用され、患者の背部が閾値位置にあるか、またはそれより下のままにあることを保証する手助けとなるように調節され得る。したがって、疼痛を悪化させる曲げの臨床的評価は、診断技術に基づく画像化に関係し得、様々な要因は、背下部痛の特徴化において定量化され得る。例えば、疼痛または面関節の亜脱臼を引き起こすか、または悪化させる曲げ量が測定され得、天然組織構造の並進に抵抗する能力が決定され得る。任意の不安定性の性質および程度はまた、評価され得る。仙骨上の棘突起の存在および形状はまた、拘束デバイスで結合するために評価され得る。棘突起の形状はまた、拘束デバイスを受容するために、棘突起の修正が必要であるか否かの決定と共に評価され得る。また、曲げを制限するために使用する拘束デバイスの剛性、寸法および/または張力は、特別の患者を最適に治療するために推定され得る。
【0064】
図11A〜11Cは、患者が異なる姿勢にある時の患者の下部腰椎の曲率を図示する。図11Aにおいては、患者1102は、中立の起立位置にあり、下部腰椎1104は、脊柱前弯症として称される、点線1106で示す背側が凹部の曲率を有する。前屈(図11B)または座位(図11C)と同様に、脊椎が湾曲する時に、前弯曲率は、平坦化する。脊椎が湾曲し続けると、曲率は、点線1108で図示するように、前方の凹面に移動し得る。これは、脊椎後弯症と称される。
【0065】
疼痛を悪化させる曲げは、しばしば、機械的背下部痛として称され、脊椎が曲げ姿勢にある時に疼痛を伴う。疼痛を悪化させる曲げは、椎骨板間の変形に関与し得る(変形カスケードは、Kirkaldy−Willisによって、より詳細に説明されている)。診断前技術は、しばしば、椎間板の高さのフイルムX線分析、可動域(ROM)およびMRIに基づく(磁気共鳴影像法)椎間板変形(例えば、Pfirrmann MRI分類システム)の等級付けを含む、臨床評価の基準として変性椎間板の減少に、より焦点を置いていた。
【0066】
図12Aは、重複する面関節1208とともに、2つの椎骨Vおよび椎間板Dを有する脊髄分節1202を図示する。脊髄分節は、しばしば、点線1210で示す、中立(前弯)姿勢において疼痛を伴わない。しかしながら、図12Bに図示するように、分節が曲げすると、分節は、より疼痛が大きくなり得る。曲げ1204は、点線1212で示すように、脊柱前弯症から脊椎後弯症へ脊髄分節の曲率を変化させ、疼痛1206をもたらす。疼痛を引き起こす曲げ量は、患者によって異なり得る。
【0067】
変性脊椎すべり症(DS)等の他の病理学はまた、曲げによって悪化され得る。DSにおいては、面関節の変形は、運動分節のせん断並進に抵抗する固有の能力を低下させる。これは、面関節の係合が減少すると、曲げにおいて悪化される。図13Aは、2つの椎骨および椎間板Dを有する脊髄運動分節1302を図示する。面関節1304は、変形し、したがって、健康な面関節(例えば、図12Aに図示する)と同程度に重複しない。図13Bに図示するように、脊髄分節1302が曲げ1306に移動すると、面関節1304は、相互から分離し、したがって、他の椎骨Vに対する1つの椎骨Vのせん断移動1308に抵抗することできなくなり、したがって、それらは、椎間板Dを歪ませ、疼痛を引き起こしながら、移動する。変性脊椎すべり症のための典型的な診断技術は、神経学的症状および全体の機械的不安定性(例えば、可動域および椎骨間並進)の評価に焦点を置いている。
【0068】
単純写真放射線画像(X線)は、どの姿勢が疼痛または不安定性を引き起こすかを決定するために、様々な姿勢の患者で撮影され得る。手術前の任意のインプラントの計画および寸法決定のために、X線を使用して、椎骨版間の角度、棘突起間または弓根距離を測定し得る。この姿勢で撮影されたX線は、疼痛を引き起こす分節姿勢を臨床医に示す。この姿勢は、患者が疼痛を経験する位置の上、および疼痛が軽減または排除される位置の下である閾値位置を表す。図14Aは、腰脊髄分節1404が曲げ1406状態になるように、前屈している患者1402を図示し、図14Bは、脊髄分節1404が中立位置にあるように、起立している患者1402を図示する。患者は、疼痛が開始される、または中断したことを示すために、ボタンまたはスイッチを作動し得る。スイッチは、画像が疼痛の閾値および他の姿勢で取り込まれるように、放射線装置に統合され得る。
【0069】
棘突起の放射線画像が変化しやすい可能性があるため(特に、軟骨組織が存在する場合)、放射線不透過性マーカーを使用して、解剖学的パラメータを測定するための一貫した測定点/基準を提供し得る。例えば、タンタルビーズは、棘突起の分離の一貫した測定を可能にするように、棘突起内に埋め込まれ得る。測定のための一貫した参照を提供するビーズを用いて、所望(恐らく、疼痛を伴わない)姿勢は、動作設定においてより確実に再現し得る。
【0070】
疼痛に対する姿勢を評価するステップの他に、この技術は、小関節面係合等の姿勢に依存する特質を評価し得る。面関節の係合は、分節の曲げに伴い減少し、それは、変性脊椎すべり症等の症状を悪化させ得る。面関節が亜脱臼し始め、せん断荷重および並進運動に対する抵抗は減少される姿勢を決定するために、放射線を使用し得る。次いで、上述の技術を使用して、これらの姿勢を予防するために、曲げ拘束を適用し、調節し得る。図15Aは、2つの椎骨V、椎間板D、および面関節1504を有する、腰脊髄運動分節1502を図示する。脊髄分節1502は、曲げ1506状態にある一方、図15Bの脊髄分節は、脊髄分節が湾曲1508を有する、中立位置にある。棘突起SPD間の距離は、放射線画像から、椎骨版間の角度IVDAと共に測定され得、これらのパラメータを使用して、閾値位置を特徴付け得る。疼痛を感じる(図15A)および疼痛を感じない姿勢、または疼痛が軽減された(図15B)姿勢の放射線画像からの解剖学的測定は、外科医が患者を手術台に正確に位置付け、曲げを拘束するインプラントに正確な寸法および張力を適用する上での補助になり得る。拘束を埋め込むための目的は、疼痛を伴わない動作が可能である一方、疼痛を伴う、または不安定な動作を制限されることである。対象の測定は、棘突起(SPD)と椎骨版間の角度(IVDA)との間の距離を含み得る。
【0071】
単純フイルム放射線写真および得られる測定はまた、疼痛を引き起こす状態および運動を決定するために、患者の日常生活の通常の活動中の曲げの姿勢測定に相関し得る。例えば、患者は、脊髄曲げを測定するゴニオメータまたは背下部の皮膚上の歪みゲージで装着され得る。ゴニオメータまたは歪みゲージからの測定は、腰曲げを推定するための上述の放射線測定に相関することができる。患者は、通常の日常生活中に、恐らく1日または1週間の間、デバイスを着用する。デバイスは、腰曲げ、および患者による疼痛を示すための入力を記録する。デバイスによって記録されたデータは、患者の疼痛の状態、頻度、および姿勢依存に関して、医師に報告することができる。
【0072】
患者の脊椎は、疼痛を伴わない姿勢をもたらし、分節不安定性または手術後の治療の有効性を評価するために、医師によって手動で操作され得る。臨床的診断設定においては、これは、典型的には、前弯曲線を作成するために、下部の腰椎に対して押し付けることによって行われる(自動車の座席の背部の支持部が脊椎の曲率を支持するように機能するのと同様)。調節可能なボルスタ(プランジャ等)を伴う枠または椅子を使用して、脊椎に反復可能な操作を適用し得る。あるいは、股関節曲げ(座席の角度を介する)を使用して、脊髄の姿勢を操作し得る。これらの技術はまた、大腿骨頭および股関節を介する近位方向に方向付けられた力を使用して、骨盤を前傾させ(前方に回転させ)、したがって、前弯曲率を誘発し得る。大腿骨頭を介して近位方向に方向付けられた力は、典型的に、膝に力または抑制を印加することによって達成されるであろう。
【0073】
医師は、疼痛を伴うまたは疼痛を伴わない腰姿勢にアクセスするために、これらの方法およびシステムを使用し得る。上述のように、患者は、疼痛の閾値を示すためにスイッチを作動し得る。スイッチは、動的放射線写真のためにタイムスタンプを提供する、またはX線機械が画像の取り込みを始動することができる。枠または椅子が放射線透過性である場合には、次いで、放射線画像はさらに、疼痛を伴う姿勢への動作を防止するように、医師が疼痛を伴わない姿勢を手術中に再現し、拘束構造を適用することを可能にし得る。また、上述のように、タンタルビーズ等の埋め込まれた放射線不透過性マーカーは、放射線測定のために一貫した基準点を提供し得る。
【0074】
図16Aは、患者1602の脊椎1604が曲がっている1606、通常の疼痛を伴う姿勢を図示する。患者は、着席している可能性があるか、または患者は、脊椎が曲げ状態にある、任意の他の位置にあり得る。図16Bは、腰椎1604の脊柱前弯症1608を回復させる、力1610または支持(自動車の座席の腰支持部と同様)の適用で、そのように疼痛が緩和されるかを示す。操作された疼痛を伴わない姿勢の放射線画像は、以前に疼痛を伴った姿勢の疼痛を緩和するために、脊髄整合が変化されるように、曲げ拘束デバイスを埋め込むために、上述のように使用し得る。
【0075】
上述のように、診断的脊髄操作は、一貫した姿勢操作を適用するために、システムを用いてさらに反復可能に実施され得る。一例は、図16Cに見られる椅子である。患者1602は、座席1616、背部1614、および方杖1618を有する椅子に着席している。プランジャ1612は、腰椎1604に操作圧力を印加することができ、方杖1618は、患者を所望の位置に維持するために役立つ。椅子は、好ましくは、前述のように放射線写真が得られ、曲げ拘束を埋め込むために使用し得るように、放射線透過性である。
【0076】
この目的に使用し得、上記に図示したシステムと同様の原則で動作する装置は、「Nada Chair」(http://www.nadachair.com/)で市販されている。腰椎の周りに巻きつけられるストラップは、脊柱前弯症回復腰支持を提供する。ストラップの対向端部は、それが、張力がかけられ、腰椎および大腿骨頭(膝を介する)の両方に力を印加することができるように、膝の周りに巻きつけられる。そのような装置を使用して、腰椎に機械的操作を適用し、疼痛に対する姿勢の影響を決定し得る。他の支持部または整形機器は、曲げによって悪化された姿勢の疼痛を診断するために同様に使用し得る。
【0077】
また、手動または機械的操作は、分節生体力学および不安定性にアクセスするために、手術中に使用し得る。外科医は、調節可能な台(Jackson Axisの台等)、またはラミナースプレッダーもしくはMekanika脊髄合成ゲージデバイス等の機器を使用して、曲げ拘束から必要とされる再安定化の量および種類を決定するために可動域または分節不安定性を測定し得る。これは、分節生物力学が手術によってどのように影響を受けるかを理解するために、分節不安定性が圧縮手順の前後に評価され得る、圧縮等の潜在的な不安定な手順に特に有用であり得る。例えば、外科機器は、脊髄構造(通常、N/mm)の線形剛性を評価するために、印加された荷重および椎骨構造(典型的には、棘突起または層)の置換を測定し得る。線形剛性および外科的機器から分節の回転中心(COR)までの距離の測定または推定を用いて、分節の曲げ剛性を、通常、1度当たりニュートンメートルで推定することができる。これは、以下のように計算し得る:
【0078】
【数1】
ここで、
Kは、分節曲げ剛性(通常、N−m/deg)であり、
Pは、外科機器によって印加された荷重(通常、N)であり、
ΔLは、機器によって印加された仮骨延長または圧縮(通常、mm)であり、
Rは、モーメントアーム、または機器から分節の回転中心までの距離(通常、mm)であり、
係数0.001は、ミリメートルの可変LおよびRに適応するように使用され、可変Kは、ニュートンメートル/度である。
【0079】
図17は、椎間板Dによって分離される、2つの椎骨Vを有する脊髄運動分節を示し、これらの測定を概略的に図示する。外科機器1702は、隣接椎骨Vの棘突起SP間に挿入され、仮骨延長または圧縮、および椎骨構造に印加された荷重を測定する。モーメントアーム1706は、運動分節の回転中心1704から外科機器1702までの距離である。分節曲げ剛性の評価を用いて、外科医は、安定化のための適切な計装(例えば、脊髄ロッド)、ならびに計装の剛性および気密度の決断を下すことができる。雛型参照テーブルソフトウエアプログラムまたは他のアルゴリズムは、これらの測定を用いて、そのような決断を下すために、埋込システムとともに提供され得る。例示的一実施形態においては、曲げへの弾性抵抗を提供するためのシステムは、複数の剛性で提供され得る。埋込システムと共に使用するために提供されるテーブルは、手術中に測定されたパラメータに基づき、どの剛性が特定の患者に適切であるかを推奨し得る。
【0080】
また、ビデオ放射線透視検査、またはX線画像のいくつかの枠から得られたもの等の動的放射線写真を使用して、より特異性および解像度で不安定性を評価し得る。変性脊椎すべり症においては、動的放射線写真は、小関節面が不安定になる、椎骨間の角度の特定に役立ち得る。椎骨の定量的運動分析はさらに、特定の運動分節の曲げ不安定性の性質を特定し得る。例えば、全体の脊椎が曲げに移動すると、運動のより大きな部分が単一の運動分節で生じ得、その分節における曲げ不安定性を示す。さらに、不安定性は、全体の可動域の特定部分内に圧倒的に存在し得る。これらの診断的な動的放射線写真技術の使用は、医師が、病理学的に不安定または疼痛を伴う曲げ動作を予防しながら、できるだけ多くの中立動作を可能にする曲げに対する拘束を適用するのを可能にし得る。同様の動的放射線写真測定を使用して、任意の治療の生物力学的有効性を評価し得る。
【0081】
上述のように、患者は、恐らく、動的放射線写真上のタイムスタンプとして、疼痛閾値を示すためにスイッチを使用し得る。また、動的放射線写真を使用して、可動域にわたる、面関節係合もしくは亜脱臼、または椎骨間並進を決定し得る。埋込可能な放射線不透過性マーカーは、外科医が手術中に所望の姿勢を再現するのを可能にする、一貫した測定基準を提供し得る。次いで、これらの技術を使用して、所望の姿勢が制限されるように、曲げ拘束を適用し得る。
【0082】
図18は、2つの異なる状況における、椎骨間の角度と分節曲げモーメントとの間の関係を図形で図示する。動的放射線写真は、中立ゾーン(湾曲A)に対する過可動性または過剰な総ROM(湾曲B)の周りの不安定性等の不安定性の性質を特定することに役立ち得る。不安定性の性質は、拘束デバイスの適用に影響を及ぼし得る。例えば、湾曲Aは、よりきつく埋め込まれる拘束を必要とし得る一方、湾曲Bは、より硬化な拘束を必要とし得る。
【0083】
図19A〜19Bは、2つの異なる状況における、全腰運動に対する分節寄与と全腰運動との間の関係を図形で図示する。動的放射線写真は、全可動域を介する、異なる運動分節間の関係を示すことができる。図19Aは、腰の全可動域にわたって均等に曲がる5つの運動分節を図示する。図19Bは、脊椎が曲がり始めると、L4〜L5分節が動作の最大部分を占める、運動分節を図示する。しかしながら、5つの分節の全可動域は、同一である。動的放射線写真は、L4〜L5の初期段階の不安定性を検出し得る一方、従来のX線は、すべての分節が同一の全可動域を有することを単純に示し得る。分節不安定性の性質を理解することは、医師が曲げ拘束インプラントを適切に適用することを可能にする。
【0084】
上述の診断的および治療技術のいずれかは、プロセスの一部としてソフトウエアを使用し得る。ソフトウエアは、椎骨版間の角度、組織剛性、株、または動的動作の特性等の解剖学的特性の測定を促進し得る。ソフトウエアパッケージは、適切な寸法、剛性、または張力等の曲げ拘束インプラントの適切なパラメータを計算するために、これらの測定を使用し得る。ソフトウエアは、目的とした生物力学的影響を有するように、拘束が移植されていることを手術中または手術後に確認し得る。例示的方法を図20に図示し、そこでは、先ず、疼痛または不安定性を引き起こす姿勢が決定され2010、次いで、疼痛を伴うおよび疼痛を伴わない姿勢、または疼痛が軽減される姿勢2020において、解剖学的特徴が測定される。曲げ拘束の適切なパラメータ(例えば、剛性、寸法、張力等)2030が計算され、次いで、外科医は、拘束2040を埋め込む。次いで、姿勢矯正は、確認され得る2050。
【0085】
図4A〜4Mに対して、上記に前述するように、棘突起拘束デバイスは、しばしば、脊髄分節正中線にわたって、棘突起についての対向側に位置付けられる、1つ以上のコンプライアンス要素を含む。コンプライアンス要素は、棘突起が相互から離れるように移動する時に、脊髄分節の曲げに抵抗する力を提供することに役立つようにバネのように機能する。コンプライアンス要素のため、相互からの標的位置に棘突起を位置付けるか、または円周等の人工装具の標的寸法を提供するためにデバイスを調節することは、困難であり得る。デバイスに張力が加えられると、コンプライアンス要素は、伸張し、かつ参照距離の決定を防止するであろう。したがって、拘束デバイスの調節中にコンプライアンス要素の伸張を防止することができる、拘束ツールを提供することは有利であろう。拘束ツールは、前述の展開および埋込手順中に使用し得る。拘束ツールは、デバイス長または円周の調節中に、その伸張を一時的に制限するか、または所望値への進展を制限するために、コンプライアンス要素に適用される。コンプライアンス要素が調節されると、拘束ツールは取り外され得る。次いで、医師は、その中の所望のプレテンションを確立するために、拘束デバイスの調節を継続し得る。
【0086】
図9A〜9Cは、棘突起拘束デバイスの調節中に、コンプライアンス要素514を保持するように適合される、拘束ツール500の例示的実施形態を図示する。9Aにおいては、複数のアーム504、506、508、510は、細長いシャフト502から延在して、コンプライアンス要素514を受容するためのクレードルまたはレセプタクル512を画定する。コンプライアンス要素514は、クレードル512内に配置される、またはその中にスナップ嵌めされ、アーム504、506、508、510は、コンプライアンス要素514の対向端部に係合し、その拡張を防止する。他の実施形態においては、クレードルの寸法は、可変である、または所定の延長量を可能にするために、コンプライアンス要素よりも大きく寸法決定され得る。また、複数のアーム504、506、508、510は、コンプライアンス要素514上のネジまたは開口部を調節するための容易なアクセスを可能にするように、十分に離間される。拘束ツール500は、外科機器に一般に使用される、チタニウム、ステンレス網、またはABS等のポリマー等の任意の数の金属から加工され得る。図9Bは、クレードル512内に配置される、コンプライアンス要素514を有する、拘束ツール500の側面図を示す。図9Cは、図9Bの斜視図を図示する。アーム504、506、508、510は、好ましくは、デバイスの操作に介入しないか、または例えば、拘束デバイスの動きに介入するか、または拘束デバイスを棘突起から離れるようにオフセットすることによって、寸法決定に影響しない。
【0087】
拘束ツール600の別の例示的実施形態を、図10A〜10Cに図示する。図10Aにおいては、拘束ツール600は、細長いシャフト602、および複数の軸方向に延在するアーム604、606、608、610を有する枠を含む。複数のアーム604、606、608、610は、コンプライアンス要素616を保持するためのクレードルまたはレセプタクル612を画定する。クレードル612は、コンプライアンス要素にも含まれ得る、任意の調節ネジおよび開口部を含む、コンプライアンス要素への容易なアクセスを可能にするように、十分に開口される。さらに、開口部614はまた、コンプライアンス要素616の係止機構へのアクセスを可能にする。係止機構は、係止ローラを備え得、その詳細は、米国特許第12/479,016号(代理人整理番号第026398〜000710US)に開示されており、その全体の内容は、参照により本明細書に事前に組み込まれている。拘束ツール600は、図9A〜9Cを参照して、上記に開示する任意の材料から加工され得る。図10Bは、クレードル612内に配置される、コンプライアンス要素616を有する、拘束ツール600の側面図を図示し、図10Cは、図10Bの斜視図である。
【0088】
拘束デバイスが2つのコンプライアンス要素を有する実施形態においては、調節中にコンプライアンス要素の両方の移動を同時に制限することができる、2つの拘束ツールを有することが有利である。図21A〜21Cは、そのようなツールの例示的実施形態を図示する。ツールは、相互に一致する2つの拘束ツール2102a、2102bを含む。各ツールは、近位端付近に回転可能なノブ2106a、2106bを有する、細長い管状シャフト2104a、2104bを含む。管状シャフトは、ノブを回転させることにより、シャフトを前進または後退させるように、ノブにネジ山で結合される、先細りのシャフトであり得る。したがって、シャフトが後退すると、アーム2118a、2118bは、コンプライアンス要素を圧縮し、その周りを閉口する。
【0089】
中心管腔2108a、2108bは、シャフトの近位端からシャフトの遠位端に延在し、ツールは、下記に説明するように、中心管腔内に位置付けられ得る。各シャフトとの近位端付近のフランジ領域2120a、2120bは、ピン2112a、2112b、および開口部2110a、2110bを含む。1つのツールのピンは、対向ツールの開口部内に位置付けられ得、それによって、2つのツールを共に解放可能に結合し、それらを実質的に相互に対して並行に維持する。シャフトの遠位端は、シャフトから半径方向外向きに延在し、溝付き領域2116a、2116bを有する、アーム2114a、2114bを含む。シャフトの遠位端はまた、第2の2118a、2118bを有する。各ツール上の2つのアームは、拘束デバイスのコンプライアンス要素を受容し、調節中にその拡大を制限するためのクレードルを形成する。フランジ領域2120a、2120bは、異なる患者の生体構造に適応するように寸法決定され得るが、好ましい実施形態においては、2つのツールの長手方向軸は、棘突起または棘間/棘上靭帯複合体にまたがるための十分な距離2130(図21Cにおいて最もよく見られる)によって分離される。この距離は、患者によって異なり得るが、好ましい実施形態においては、10mm〜25mm、より好ましくは、15mm〜20mmの幅である。また、上述のピン開口部結合機構を使用することによって、2つのツールは、依然として、1つの自由度を有し、内外方向に移動することができる。コンプライアンス要素は、管腔がコンプライアンス要素上の調節特性と整列するように、クレードル内に保持される。例えば、図22は、らせん状ネジ状本体2204を有する、コンプライアンス要素2202の例示的実施形態を図示する。コンプライアンス要素の1つの端部上のピン2208は、その上にコンプライアンスデバイスのテザー構造2206を固定し、対向端は、コンプライアンス要素筐体2210に係止ネジ2212およびテザー調節ローリング機構(図示せず)を含む。係止ネジ2212が緩む時に、ツールは、ローリング機構を回転させて、そこを通過するテザーを締結または緩めるために、筐体内に挿入され得る。調節が完了すると、係止ネジは、ローラを適所に係止するように、締結され得る。これらの特性は、それらが、係止ネジまたはローラ機構と同心円状に整列させられる拘束デバイスシャフトの管腔を通って、ツール(例えば、ネジドライバ、六角形ドライバ等)を通過させることによってアクセスされ得る。拘束ツールの別の利点は、ローラ機構および係止ネジを締結するプロセス中に反対トルクを提供することである。
【0090】
上記は、本発明の好ましい実施形態の完全な説明であるが、様々な代替、修正、および等価物が使用され得る。したがって、上記の説明は、付属の請求項によって定義される、本発明の範囲を制限するものと解釈されてはならない。
【特許請求の範囲】
【請求項1】
患者の脊髄分節に人工装具を結合するための方法であって、該方法は、
該脊髄分節に沿って配置される第1の基準点および第2の基準点を選択するステップと、
標的距離を手術前に測定するステップであって、該標的距離は、該患者が好ましい姿勢である間に該第1の基準点と第2の基準点との間に延在する、ステップと、
該人工装具を該脊髄分節に結合するステップと、
該標的距離に基づいて、該第1の基準点と第2の基準点との間の距離を設定するために、該人工装具を手術中に調節するステップと
を含む、方法。
【請求項2】
前記第1の基準点は、第1の椎骨上に配置され、前記第2の基準点は、第2の椎骨または仙骨上に配置される、請求項1に記載の方法。
【請求項3】
前記第1の基準点は、第1の椎骨の棘突起の上面上に配置され、前記第2の基準点は、第2の椎骨の第2の棘突起の下面上に配置され、該第1の椎骨は、該第2の椎骨の頭方に配置される、請求項1に記載の方法。
【請求項4】
前記第1の基準点は、第1の椎骨の第1の棘突起の下面上に配置され、前記第2の基準点は、第2の椎骨の第2の棘突起の上面上に配置され、該第1の椎骨は、該第2の椎骨の頭方に配置される、請求項1に記載の方法。
【請求項5】
前記好ましい姿勢は、起立位置を含む、請求項1に記載の方法。
【請求項6】
前記好ましい姿勢は、痛みを伴わない位置を含む、請求項1に記載の方法。
【請求項7】
前記測定するステップは、前記患者が前記好ましい姿勢である間に撮影された、該患者の放射線写真を観察するステップを含む、請求項1に記載の方法。
【請求項8】
前記放射線写真は、手術前に撮影される、請求項7に記載の方法。
【請求項9】
前記放射線写真は、前記脊髄分節の側面図を含む、請求項7に記載の方法。
【請求項10】
前記人工装具は、テザー構造を備え、前記結合するステップは、該テザー構造の第1の部分を上棘突起と係合するステップと、該テザー構造の第2の部分を下棘突起または仙骨と係合するステップとを含む、請求項1に記載の方法。
【請求項11】
前記調節するステップは、前記人工装具を調節するステップを含み、それにより、前記患者が前記好ましい姿勢である時に、該人工装具は中立位置にあり、該人工装具が、依然として前記脊髄分節の有意に制限されていない伸展を可能にしながら、該脊髄分節の曲げに抵抗する力を提供する、請求項1に記載の方法。
【請求項12】
前記調節するステップは、前記患者が前記好ましい姿勢以外の位置にある間に、前記人工装具を調節するステップを含む、請求項1に記載の方法。
【請求項13】
前記調節するステップは、その上の較正マーキングを観察するステップを含む、請求項1に記載の方法。
【請求項14】
前記調節するステップは、前記第1の基準点と第2の基準点との間の距離を前記標的距離に設定するステップを含む、請求項1に記載の方法。
【請求項15】
前記第1の基準点と第2の基準点との間の距離が、前記標的距離に実質的に一致するステップを確認するステップをさらに含む、請求項1に記載の方法。
【請求項16】
前記確認するステップは、前記第1の基準点と第2の基準点との間の距離を決定するためにゲージを使用するステップを含む、請求項15に記載の方法。
【請求項17】
前記第1の基準点と第2の基準点との間の距離が、前記標的距離に実質的に一致するまで、人工装具を再調節するステップをさらに含む、請求項15に記載の方法。
【請求項18】
前記人工装具は、第1のコンプライアンス要素を備え、前記方法は、該人工装具の調節中に、第1の拘束装置を該第1のコンプライアンス要素に係合し、係止して、該コンプライアンス要素の伸展または収縮を制限するステップをさらに含む、請求項1に記載の方法。
【請求項19】
前記第1のコンプライアンス要素から前記第1の拘束装置を係脱するステップにより、該コンプライアンス要素の移動を可能にするステップをさらに含む、請求項18に記載の方法。
【請求項20】
前記人工装具は、第2のコンプライアンス要素を備え、前記方法は、
該人工装具の調節中に、第2の拘束装置を該第2のコンプライアンス要素と係合するステップにより、該第2のコンプライアンス要素の伸展または収縮を制限するステップと、
前記第1および第2の拘束装置を共に解放可能に係止するステップにより、前記脊髄分節の正中線についての反対側の前記第1のコンプライアンス要素と該第2のコンプライアンス要素との整列および位置付けを容易にするステップと
をさらに含む、請求項18に記載の方法。
【請求項21】
1つの自由度に沿って、前記第2の拘束装置に対して前記第1の拘束装置を移動させるステップをさらに含み、それにより、様々な厚さの棘突起および棘間/棘上靭帯複合体に適応する、請求項20に記載の方法。
【請求項22】
前記第1または第2の拘束装置の中心管腔内にドライバまたはツールを位置付け、それによって、前記コンプライアンス要素上の係止機構を用いて該ドライバまたはツールを同心円状に整列させるステップをさらに含む、請求項20に記載の方法。
【請求項23】
前記第1または第2のコンプライアンス要素が調節される時、または前記第1および第2の拘束装置が共に解放可能に係止される時に、反対のトルクを提供するステップをさらに含む、請求項20に記載の方法。
【請求項24】
前記人工装具に所望の値までプレテンションを加えるステップをさらに含む、請求項1に記載の方法。
【請求項25】
前記標的距離は、長軸長を画定し、前記調節するステップは、標的人工装具円周を決定するために該標的距離を使用するステップと、該標的円周に該人工装具を調節するステップとを含む、請求項1に記載の方法。
【請求項26】
前記長軸長は、参照テーブル内の前記標的円周と相関している、請求項25に記載の方法。
【請求項27】
前記長軸長は、前記人工装具上の較正マーキングと相関している、請求項25に記載の方法。
【請求項28】
前記人工装具円周が前記標的円周に実質的に一致するステップを確認するステップをさらに含む、請求項25に記載の方法。
【請求項29】
前記人工装具円周を確認するステップは、前記人工装具上の較正マーキングを観察するステップを含む、請求項28に記載の方法。
【請求項30】
前記人工装具円周が前記標的円周に実質的に一致するまで、前記人工装具を再調節するステップをさらに含む、請求項28に記載の方法。
【請求項31】
前記脊髄分節に沿って配置される第3の基準点および第4の基準点を選択するステップであって、該第3の基準点と第4の基準点との間の距離は、短軸長を有する短軸を画定し、該短軸は、前記長軸に対して直角である、ステップと、
前記標的人工装具円周を決定するために、手術前画像上に該短軸長を測定するステップであって、該標的円周は、該人工装具が上棘突起および下棘突起を包囲するループを形成し、所望の姿勢を超えた曲げに抵抗する力を提供するステップに十分である、ステップと
をさらに含む、請求項25に記載の方法。
【請求項32】
前記第3および第4の基準点は、棘突起についての対向側にあり、棘突起幅に適応する必要がある前記人工装具の長さを推定する、請求項31に記載の方法。
【請求項33】
前記第3および第4の基準点は、単一の椎骨上に配置される、請求項31に記載の方法。
【請求項34】
前記短軸長は、参照テーブル内の前記標的円周と相関している、請求項31に記載の方法。
【請求項35】
前記短軸長は、前記人工装具上の較正マーキングと相関している、請求項31に記載の方法。
【請求項36】
前記脊髄分節の一部分を減圧するステップをさらに含む、請求項1に記載の方法。
【請求項37】
患者の脊髄分節の曲げを制限するためのシステムであって、
上棘突起と、下棘突起または仙骨と結合されるように適合されるテザー構造と、
該テザー構造と結合される第1のコンプライアンス要素と、
該コンプライアンス要素を所望の位置に保持するために、または該コンプライアンス要素の運動を規定の範囲に制限するために、該コンプライアンス要素と解放可能に結合される第1の拘束ツールと
を備える、システム。
【請求項38】
前記テザー構造は、実質的に非伸張性である、請求項37に記載のシステム。
【請求項39】
前記第1の拘束ツールは、細長いシャフトを備える、請求項37に記載のシステム。
【請求項40】
前記第1の拘束ツールは、前記第1のコンプライアンス要素を解放可能に保持するように適合されるクレードルを備える、請求項37に記載のシステム。
【請求項41】
前記第1の拘束ツールは、複数の細長いアームを備え、該複数のアームは、前記コンプライアンス要素の伸長に対する拘束を形成する、請求項37に記載のシステム。
【請求項42】
前記第1のツールは、第1のコンプライアンス要素を所望の緊張状態に保持する、請求項37に記載のシステム。
【請求項43】
前記第1の拘束ツールは、前記第1のコンプライアンス要素に圧縮力を印加する、請求項37に記載のシステム。
【請求項44】
前記圧縮力は、可変である、請求項43に記載のシステム。
【請求項45】
前記第1の拘束ツールは、前記第1のコンプライアンス要素が規定の距離に延在するまで、該第1のコンプライアンス要素の伸展を制限しない、請求項37に記載のシステム。
【請求項46】
前記第1の拘束ツールは、前記所望の位置、緊張状態、または範囲を変化させるように調節可能である、請求項37に記載のシステム。
【請求項47】
前記テザー構造と結合される第2のコンプライアンス要素と、
該第2のコンプライアンス要素を所望の位置に保持するために、または該第2のコンプライアンス要素の動作を規定の範囲に制限するために、該第2のコンプライアンス要素と解放可能に結合される第2の拘束ツールと
をさらに備え、
前記第1および該第2の拘束ツールは、前記脊髄分節の正中線についての対向する側の前記第1のコンプライアンス要素と該第2のコンプライアンス要素との整列および位置付けを容易にするために、解放可能かつ対称的に共に結合される、請求項37に記載のシステム。
【請求項48】
前記第1および前記第2の拘束ツールは、1つの自由度に沿って、相互に対して移動可能であり、それによって、様々な厚さの棘突起に適応する、請求項47に記載のシステム。
【請求項49】
前記第1または前記第2のコンプライアンス要素は、係止機構を備え、前記第1または前記第2の拘束ツールのうちの少なくとも1つは、該係止機構を用いて同心円状にドライバまたは他のツールを受容し、整列させるように適合される管腔を有する細長いシャフトを備える、請求項47に記載のシステム。
【請求項50】
前記第1または前記第2のコンプライアンス要素は、前記第1または前記第2の拘束ツールを用いて解放可能に係止する、請求項47に記載のシステム。
【請求項51】
前記第1または前記第2の拘束ツールは、前記係止機構が作動させられると、反対のトルクを提供するように適合される、請求項49に記載のシステム。
【請求項52】
患者の背下部痛を治療するための方法であって、該方法は、
該背下部を様々な曲げ位置に配置するために該患者に指示を提供するステップと、
該患者が背下部痛を経験しないか、または背下部痛が軽減される該背下部の閾値位置を決定するステップと、
該閾値位置にある間に該患者の背下部の第1の画像または一組の画像を提供するステップと、
該第1の画像または該一組の画像から該患者の背下部の特徴を測定するステップと、
拘束デバイスを該患者の背下部に結合するステップと、
該患者の背下部の特徴を、それに結合された該拘束デバイスによって再測定するステップと、
該再測定された特徴を、該測定された特徴と比較するステップと、
該測定された特徴と再測定された特徴との比較に基づいて、該患者の背下部が、該閾値位置より下の位置にあるように該拘束デバイスを調節するステップであって、それにより、該背下部痛または該背下部の不安定性が軽減または排除される、ステップと
を含む、方法。
【請求項53】
前記決定するステップは、疼痛が経験される時を示すための手段を前記患者に提供するステップを含む、請求項52に記載の方法。
【請求項54】
前記手段は、作動可能なスイッチを備える、請求項53に記載の方法。
【請求項55】
前記第1の画像または前記一組の画像は、X線、MRI、およびCTスキャンのうちの1つを含む、請求項52に記載の方法。
【請求項56】
前記提供するステップは、疼痛を感じる姿勢と、疼痛を感じない姿勢または疼痛が軽減された姿勢との間の前記患者の背下部の単一の連続動作から、前記一組の画像を取得するステップを含む、請求項52に記載の方法。
【請求項57】
前記測定された特徴は、椎骨板間の角度、棘突起間の距離、および弓根間の距離のうちの1つを含む、請求項52に記載の方法。
【請求項58】
前記測定するステップは、前記特徴を定量化するためのキャリパまたは角度測定デバイスを使用するステップを含む、請求項57に記載の方法。
【請求項59】
前記結合するステップは、前記拘束デバイスを上棘突起と、下棘突起または仙骨と係合するステップを含む、請求項52に記載の方法。
【請求項60】
前記拘束デバイスは、前記背下部の曲げに抵抗する力を提供するように適合される、請求項52に記載の方法。
【請求項61】
前記再測定するステップは、前記患者の背下部の第2の画像または一組の画像を、それに結合された前記拘束デバイスによって提供するステップを含む、請求項52に記載の方法。
【請求項62】
前記第2の画像または前記一組の画像は、X線、MRI、またはCTスキャンのうちの1つを含む、請求項61に記載の方法。
【請求項63】
前記再測定するステップは、1つ以上の放射線不透過性マーカーを前記患者の背下部と係合するように配置するステップを含む、請求項61に記載の方法。
【請求項64】
前記配置するステップは、前記放射線不透過性マーカーのうちの少なくとも1つを前記患者の背下部の棘突起と結合するステップを含む、請求項63に記載の方法。
【請求項65】
前記比較するステップは、前記第1の放射線画像と前記第2の放射線画像または複数組の画像とを視覚的に比較するステップを含む、請求項61に記載の方法。
【請求項66】
調節するステップは、前記拘束デバイスの長さまたは緊張状態を調節するステップを含む、請求項52に記載の方法。
【請求項67】
前記背下部の棘突起の存在および形状を、それに前記拘束デバイスを結合するために評価するステップをさらに含む、請求項52に記載の方法。
【請求項68】
前記背下部内の面関節係合を評価するステップをさらに含む、請求項52に記載の方法。
【請求項69】
前記評価するステップは、関節突起の線状の重複を測定するステップを含む、請求項68に記載の方法。
【請求項70】
前記拘束デバイスを調節する前記ステップは、前記背下部内の少なくとも1つの面関節における面関節係合を増大させるために、該拘束デバイスを調節するステップを含む、請求項52に記載の方法。
【請求項71】
前記拘束デバイスを調節する前記ステップは、前記背下部内の少なくとも1つの面関節の過伸展または係止を防止するために、該拘束デバイスを調節するステップを含む、請求項52に記載の方法。
【請求項72】
前記背下部が、測定された特徴と再測定された特徴との比較に基づく前記閾値位置の位置、またはそれより下の位置にあるように前記患者の背下部を手術中に操作するステップをさらに含む、請求項52に記載の方法。
【請求項73】
前記操作するステップは、前記患者の背下部を、その中で脊柱前弯症を形成または増大させるように操作するステップを含む、請求項72に記載の方法。
【請求項74】
患者の背下部の変性脊椎すべり症を治療するための方法であって、該方法は、
該背下部を様々な曲げ位置に配置するために、該患者に指示を提供するステップと、
該様々な位置の該背下部の複数の画像を提供するステップと、
該患者の背下部内の面関節が亜脱臼し始める、該背下部の閾値位置を決定するステップと、
該閾値位置にある間に該患者の背下部の第1の画像を提供するステップと、
拘束デバイスを該患者の背下部に結合するステップと、
該拘束デバイスが該患者の背下部に結合された後に、手術中の該患者の背中の第2の画像を提供するステップと、
該第1の画像と該第2の画像とを比較するステップと、
該患者の背下部が、該第1の画像と該第2の画像との比較に基づく該閾値位置より下の位置にあり、それにより、該面関節の該亜脱臼が軽減または排除されるように該拘束デバイスを調節するステップと
を含む、方法。
【請求項75】
前記決定するステップは、疼痛が経験される時を示すための手段を前記患者に提供するステップを含む、請求項74に記載の方法。
【請求項76】
前記手段は、作動可能なスイッチを備える、請求項75に記載の方法。
【請求項77】
神経減圧を同時に実施するステップをさらに含む、請求項74に記載の方法。
【請求項78】
前記決定するステップは、前記患者の背下部の同時減圧によって、またはよらずに面関節の係合を評価するステップを含む、請求項74に記載の方法。
【請求項79】
前記第1の画像は、X線、MRI、またはCTスキャンのうちの1つを含む、請求項74に記載の方法。
【請求項80】
前記結合するステップは、前記拘束デバイスを上棘突起と、下棘突起または仙骨と係合するステップを含む、請求項74に記載の方法。
【請求項81】
前記拘束デバイスは、前記背下部の曲げに抵抗する力を提供するように適合される、請求項74に記載の方法。
【請求項82】
前記第2の画像は、X線を含む、請求項74に記載の方法。
【請求項83】
1つ以上の放射線不透過性マーカーを前記患者の背下部と係合するように配置するステップをさらに含む、請求項82に記載の方法。
【請求項84】
前記配置するステップは、前記放射線不透過性マーカーのうちの少なくとも1つを前記患者の背下部の棘突起と結合するステップを含む、請求項83に記載の方法。
【請求項85】
前記比較するステップは、前記第1の画像と、前記第2の画像、または複数の組の画像との間の椎骨板間の角度、棘突起間の距離、面関節係合、または弓根間の距離を比較するステップを含む、請求項74に記載の方法。
【請求項86】
前記比較するステップは、前記第1および前記第2の画像の背下部の特徴を定量化するためにキャリパまたは角度測定デバイスを使用するステップを含む、請求項74に記載の方法。
【請求項87】
前記比較するステップは、前記第1の画像と前記第2の画像とを視覚的に比較するステップを含む、請求項74に記載の方法。
【請求項88】
前記調節するステップは、前記拘束デバイスにおける長さまたは緊張状態を調節するステップを含む、請求項74に記載の方法。
【請求項89】
前記背下部の棘突起の存在および形状を、それに前記拘束デバイスを結合するために評価するステップをさらに含む、請求項74に記載の方法。
【請求項90】
患者の背下部痛を治療するための方法であって、該方法は、
該背下部痛が軽減または排除される位置に該患者の背下部を操作するステップと、
該位置を記録するステップと、
該患者の背下部において該位置を手術中に再現するステップと、
拘束デバイスを該背下部に結合するステップと
を含む、方法。
【請求項91】
前記操作するステップは、前記患者の背下部を手動で操作するステップを含む、請求項90に記載の方法。
【請求項92】
前記操作するステップは、前記患者の背下部において脊柱前弯症を形成または増大させるステップを含む、請求項90に記載の方法。
【請求項93】
前記操作するステップは、調節可能な腰部部材によって枠または椅子に前記患者を配置するステップを含む、請求項90に記載の方法。
【請求項94】
前記操作するステップは、股関節を曲げさせるステップを含む、請求項90に記載の方法。
【請求項95】
前記股関節を曲げさせるステップは、骨盤を前傾させるために大腿骨頭を通して近位方向に力を方向付け、それによって、前記患者の背下部において脊柱前弯症を形成または増大させるステップを含む、請求項94に記載の方法。
【請求項96】
膝を拘束するステップをさらに含む、請求項95に記載の方法。
【請求項97】
前記記録するステップは、疼痛が経験される時を示すための手段を前記患者に提供するステップを含む、請求項90に記載の方法。
【請求項98】
前記手段は、作動可能なスイッチを備える、請求項97に記載の方法。
【請求項99】
前記再現するステップは、前記患者の背下部を前記位置に手動で操作するステップを含む、請求項90に記載の方法。
【請求項100】
前記再現するステップは、前記患者の背下部において脊柱前弯症を形成または増大させるステップを含む、請求項90に記載の方法。
【請求項101】
前記結合するステップは、前記拘束デバイスを上棘突起と、下棘突起または仙骨と係合するステップを含む、請求項90に記載の方法。
【請求項102】
前記拘束デバイスは、前記背下部の曲げに抵抗する力を提供するように適合される、請求項101に記載の方法。
【請求項103】
前記位置にある前記患者の背下部の画像を提供するステップをさらに含む、請求項90に記載の方法。
【請求項104】
前記画像は、X線を含む、請求項103に記載の方法。
【請求項105】
前記位置を再現した後に、前記患者の背下部の手術中画像を提供するステップをさらに含む、請求項90に記載の方法。
【請求項106】
前記手術中画像は、X線、MRI、およびCTスキャンのうちの1つを含む、請求項105に記載の方法。
【請求項107】
放射線不透過性マーカーを前記患者の背下部と結合するステップをさらに含む、請求項90に記載の方法。
【請求項108】
前記放射線不透過性マーカーは、前記患者の背下部の棘突起と結合される、請求項107に記載の方法。
【請求項109】
前記患者の背下部の分節の可動域、分節安定性、線形剛性、または曲げ剛性を手術中に特徴付けるステップをさらに含む、請求項90に記載の方法。
【請求項110】
前記患者の背下部の前記特徴付けに基づいて、前記拘束デバイスを調節するステップをさらに含む、請求項109に記載の方法。
【請求項111】
前記調節するステップは、前記拘束デバイスにおける長さまたは緊張状態を調節するステップを含む、請求項110に記載の方法。
【請求項112】
前記患者の背下部の特徴付けを参照ガイドと比較するステップと、
該参照ガイドによって提供される情報に基づいて、前記拘束デバイスを調節するステップと
をさらに含む、請求項109に記載の方法。
【請求項113】
患者の脊椎すべり症を治療するための方法であって、
背下部を様々な曲げ位置に配置するように該患者に指示を提供するステップと、
該背下部の閾値位置を決定するステップであって、該閾値位置において、該患者は並進不安定性を経験しないか、または並進不安定性が軽減される、ステップと、
該閾値位置にある間の該患者の背下部の第1の画像または一組の画像を提供するステップと、
該第1の画像または該一組の画像から該患者の背下部の特徴を測定するステップと、
拘束デバイスを該患者の背下部に結合するステップと、
該患者の背下部の特徴を、それに結合された該拘束デバイスによって再測定するステップと、
該再測定された特徴を該測定された特徴と比較するステップと、
該患者の背下部が、測定の特徴と再測定された特徴との比較に基づく該閾値位置より下の位置にあり、それにより、該背下部の不安定性が軽減または排除されるように、該拘束デバイスを調節するステップと
を含む、方法。
【請求項1】
患者の脊髄分節に人工装具を結合するための方法であって、該方法は、
該脊髄分節に沿って配置される第1の基準点および第2の基準点を選択するステップと、
標的距離を手術前に測定するステップであって、該標的距離は、該患者が好ましい姿勢である間に該第1の基準点と第2の基準点との間に延在する、ステップと、
該人工装具を該脊髄分節に結合するステップと、
該標的距離に基づいて、該第1の基準点と第2の基準点との間の距離を設定するために、該人工装具を手術中に調節するステップと
を含む、方法。
【請求項2】
前記第1の基準点は、第1の椎骨上に配置され、前記第2の基準点は、第2の椎骨または仙骨上に配置される、請求項1に記載の方法。
【請求項3】
前記第1の基準点は、第1の椎骨の棘突起の上面上に配置され、前記第2の基準点は、第2の椎骨の第2の棘突起の下面上に配置され、該第1の椎骨は、該第2の椎骨の頭方に配置される、請求項1に記載の方法。
【請求項4】
前記第1の基準点は、第1の椎骨の第1の棘突起の下面上に配置され、前記第2の基準点は、第2の椎骨の第2の棘突起の上面上に配置され、該第1の椎骨は、該第2の椎骨の頭方に配置される、請求項1に記載の方法。
【請求項5】
前記好ましい姿勢は、起立位置を含む、請求項1に記載の方法。
【請求項6】
前記好ましい姿勢は、痛みを伴わない位置を含む、請求項1に記載の方法。
【請求項7】
前記測定するステップは、前記患者が前記好ましい姿勢である間に撮影された、該患者の放射線写真を観察するステップを含む、請求項1に記載の方法。
【請求項8】
前記放射線写真は、手術前に撮影される、請求項7に記載の方法。
【請求項9】
前記放射線写真は、前記脊髄分節の側面図を含む、請求項7に記載の方法。
【請求項10】
前記人工装具は、テザー構造を備え、前記結合するステップは、該テザー構造の第1の部分を上棘突起と係合するステップと、該テザー構造の第2の部分を下棘突起または仙骨と係合するステップとを含む、請求項1に記載の方法。
【請求項11】
前記調節するステップは、前記人工装具を調節するステップを含み、それにより、前記患者が前記好ましい姿勢である時に、該人工装具は中立位置にあり、該人工装具が、依然として前記脊髄分節の有意に制限されていない伸展を可能にしながら、該脊髄分節の曲げに抵抗する力を提供する、請求項1に記載の方法。
【請求項12】
前記調節するステップは、前記患者が前記好ましい姿勢以外の位置にある間に、前記人工装具を調節するステップを含む、請求項1に記載の方法。
【請求項13】
前記調節するステップは、その上の較正マーキングを観察するステップを含む、請求項1に記載の方法。
【請求項14】
前記調節するステップは、前記第1の基準点と第2の基準点との間の距離を前記標的距離に設定するステップを含む、請求項1に記載の方法。
【請求項15】
前記第1の基準点と第2の基準点との間の距離が、前記標的距離に実質的に一致するステップを確認するステップをさらに含む、請求項1に記載の方法。
【請求項16】
前記確認するステップは、前記第1の基準点と第2の基準点との間の距離を決定するためにゲージを使用するステップを含む、請求項15に記載の方法。
【請求項17】
前記第1の基準点と第2の基準点との間の距離が、前記標的距離に実質的に一致するまで、人工装具を再調節するステップをさらに含む、請求項15に記載の方法。
【請求項18】
前記人工装具は、第1のコンプライアンス要素を備え、前記方法は、該人工装具の調節中に、第1の拘束装置を該第1のコンプライアンス要素に係合し、係止して、該コンプライアンス要素の伸展または収縮を制限するステップをさらに含む、請求項1に記載の方法。
【請求項19】
前記第1のコンプライアンス要素から前記第1の拘束装置を係脱するステップにより、該コンプライアンス要素の移動を可能にするステップをさらに含む、請求項18に記載の方法。
【請求項20】
前記人工装具は、第2のコンプライアンス要素を備え、前記方法は、
該人工装具の調節中に、第2の拘束装置を該第2のコンプライアンス要素と係合するステップにより、該第2のコンプライアンス要素の伸展または収縮を制限するステップと、
前記第1および第2の拘束装置を共に解放可能に係止するステップにより、前記脊髄分節の正中線についての反対側の前記第1のコンプライアンス要素と該第2のコンプライアンス要素との整列および位置付けを容易にするステップと
をさらに含む、請求項18に記載の方法。
【請求項21】
1つの自由度に沿って、前記第2の拘束装置に対して前記第1の拘束装置を移動させるステップをさらに含み、それにより、様々な厚さの棘突起および棘間/棘上靭帯複合体に適応する、請求項20に記載の方法。
【請求項22】
前記第1または第2の拘束装置の中心管腔内にドライバまたはツールを位置付け、それによって、前記コンプライアンス要素上の係止機構を用いて該ドライバまたはツールを同心円状に整列させるステップをさらに含む、請求項20に記載の方法。
【請求項23】
前記第1または第2のコンプライアンス要素が調節される時、または前記第1および第2の拘束装置が共に解放可能に係止される時に、反対のトルクを提供するステップをさらに含む、請求項20に記載の方法。
【請求項24】
前記人工装具に所望の値までプレテンションを加えるステップをさらに含む、請求項1に記載の方法。
【請求項25】
前記標的距離は、長軸長を画定し、前記調節するステップは、標的人工装具円周を決定するために該標的距離を使用するステップと、該標的円周に該人工装具を調節するステップとを含む、請求項1に記載の方法。
【請求項26】
前記長軸長は、参照テーブル内の前記標的円周と相関している、請求項25に記載の方法。
【請求項27】
前記長軸長は、前記人工装具上の較正マーキングと相関している、請求項25に記載の方法。
【請求項28】
前記人工装具円周が前記標的円周に実質的に一致するステップを確認するステップをさらに含む、請求項25に記載の方法。
【請求項29】
前記人工装具円周を確認するステップは、前記人工装具上の較正マーキングを観察するステップを含む、請求項28に記載の方法。
【請求項30】
前記人工装具円周が前記標的円周に実質的に一致するまで、前記人工装具を再調節するステップをさらに含む、請求項28に記載の方法。
【請求項31】
前記脊髄分節に沿って配置される第3の基準点および第4の基準点を選択するステップであって、該第3の基準点と第4の基準点との間の距離は、短軸長を有する短軸を画定し、該短軸は、前記長軸に対して直角である、ステップと、
前記標的人工装具円周を決定するために、手術前画像上に該短軸長を測定するステップであって、該標的円周は、該人工装具が上棘突起および下棘突起を包囲するループを形成し、所望の姿勢を超えた曲げに抵抗する力を提供するステップに十分である、ステップと
をさらに含む、請求項25に記載の方法。
【請求項32】
前記第3および第4の基準点は、棘突起についての対向側にあり、棘突起幅に適応する必要がある前記人工装具の長さを推定する、請求項31に記載の方法。
【請求項33】
前記第3および第4の基準点は、単一の椎骨上に配置される、請求項31に記載の方法。
【請求項34】
前記短軸長は、参照テーブル内の前記標的円周と相関している、請求項31に記載の方法。
【請求項35】
前記短軸長は、前記人工装具上の較正マーキングと相関している、請求項31に記載の方法。
【請求項36】
前記脊髄分節の一部分を減圧するステップをさらに含む、請求項1に記載の方法。
【請求項37】
患者の脊髄分節の曲げを制限するためのシステムであって、
上棘突起と、下棘突起または仙骨と結合されるように適合されるテザー構造と、
該テザー構造と結合される第1のコンプライアンス要素と、
該コンプライアンス要素を所望の位置に保持するために、または該コンプライアンス要素の運動を規定の範囲に制限するために、該コンプライアンス要素と解放可能に結合される第1の拘束ツールと
を備える、システム。
【請求項38】
前記テザー構造は、実質的に非伸張性である、請求項37に記載のシステム。
【請求項39】
前記第1の拘束ツールは、細長いシャフトを備える、請求項37に記載のシステム。
【請求項40】
前記第1の拘束ツールは、前記第1のコンプライアンス要素を解放可能に保持するように適合されるクレードルを備える、請求項37に記載のシステム。
【請求項41】
前記第1の拘束ツールは、複数の細長いアームを備え、該複数のアームは、前記コンプライアンス要素の伸長に対する拘束を形成する、請求項37に記載のシステム。
【請求項42】
前記第1のツールは、第1のコンプライアンス要素を所望の緊張状態に保持する、請求項37に記載のシステム。
【請求項43】
前記第1の拘束ツールは、前記第1のコンプライアンス要素に圧縮力を印加する、請求項37に記載のシステム。
【請求項44】
前記圧縮力は、可変である、請求項43に記載のシステム。
【請求項45】
前記第1の拘束ツールは、前記第1のコンプライアンス要素が規定の距離に延在するまで、該第1のコンプライアンス要素の伸展を制限しない、請求項37に記載のシステム。
【請求項46】
前記第1の拘束ツールは、前記所望の位置、緊張状態、または範囲を変化させるように調節可能である、請求項37に記載のシステム。
【請求項47】
前記テザー構造と結合される第2のコンプライアンス要素と、
該第2のコンプライアンス要素を所望の位置に保持するために、または該第2のコンプライアンス要素の動作を規定の範囲に制限するために、該第2のコンプライアンス要素と解放可能に結合される第2の拘束ツールと
をさらに備え、
前記第1および該第2の拘束ツールは、前記脊髄分節の正中線についての対向する側の前記第1のコンプライアンス要素と該第2のコンプライアンス要素との整列および位置付けを容易にするために、解放可能かつ対称的に共に結合される、請求項37に記載のシステム。
【請求項48】
前記第1および前記第2の拘束ツールは、1つの自由度に沿って、相互に対して移動可能であり、それによって、様々な厚さの棘突起に適応する、請求項47に記載のシステム。
【請求項49】
前記第1または前記第2のコンプライアンス要素は、係止機構を備え、前記第1または前記第2の拘束ツールのうちの少なくとも1つは、該係止機構を用いて同心円状にドライバまたは他のツールを受容し、整列させるように適合される管腔を有する細長いシャフトを備える、請求項47に記載のシステム。
【請求項50】
前記第1または前記第2のコンプライアンス要素は、前記第1または前記第2の拘束ツールを用いて解放可能に係止する、請求項47に記載のシステム。
【請求項51】
前記第1または前記第2の拘束ツールは、前記係止機構が作動させられると、反対のトルクを提供するように適合される、請求項49に記載のシステム。
【請求項52】
患者の背下部痛を治療するための方法であって、該方法は、
該背下部を様々な曲げ位置に配置するために該患者に指示を提供するステップと、
該患者が背下部痛を経験しないか、または背下部痛が軽減される該背下部の閾値位置を決定するステップと、
該閾値位置にある間に該患者の背下部の第1の画像または一組の画像を提供するステップと、
該第1の画像または該一組の画像から該患者の背下部の特徴を測定するステップと、
拘束デバイスを該患者の背下部に結合するステップと、
該患者の背下部の特徴を、それに結合された該拘束デバイスによって再測定するステップと、
該再測定された特徴を、該測定された特徴と比較するステップと、
該測定された特徴と再測定された特徴との比較に基づいて、該患者の背下部が、該閾値位置より下の位置にあるように該拘束デバイスを調節するステップであって、それにより、該背下部痛または該背下部の不安定性が軽減または排除される、ステップと
を含む、方法。
【請求項53】
前記決定するステップは、疼痛が経験される時を示すための手段を前記患者に提供するステップを含む、請求項52に記載の方法。
【請求項54】
前記手段は、作動可能なスイッチを備える、請求項53に記載の方法。
【請求項55】
前記第1の画像または前記一組の画像は、X線、MRI、およびCTスキャンのうちの1つを含む、請求項52に記載の方法。
【請求項56】
前記提供するステップは、疼痛を感じる姿勢と、疼痛を感じない姿勢または疼痛が軽減された姿勢との間の前記患者の背下部の単一の連続動作から、前記一組の画像を取得するステップを含む、請求項52に記載の方法。
【請求項57】
前記測定された特徴は、椎骨板間の角度、棘突起間の距離、および弓根間の距離のうちの1つを含む、請求項52に記載の方法。
【請求項58】
前記測定するステップは、前記特徴を定量化するためのキャリパまたは角度測定デバイスを使用するステップを含む、請求項57に記載の方法。
【請求項59】
前記結合するステップは、前記拘束デバイスを上棘突起と、下棘突起または仙骨と係合するステップを含む、請求項52に記載の方法。
【請求項60】
前記拘束デバイスは、前記背下部の曲げに抵抗する力を提供するように適合される、請求項52に記載の方法。
【請求項61】
前記再測定するステップは、前記患者の背下部の第2の画像または一組の画像を、それに結合された前記拘束デバイスによって提供するステップを含む、請求項52に記載の方法。
【請求項62】
前記第2の画像または前記一組の画像は、X線、MRI、またはCTスキャンのうちの1つを含む、請求項61に記載の方法。
【請求項63】
前記再測定するステップは、1つ以上の放射線不透過性マーカーを前記患者の背下部と係合するように配置するステップを含む、請求項61に記載の方法。
【請求項64】
前記配置するステップは、前記放射線不透過性マーカーのうちの少なくとも1つを前記患者の背下部の棘突起と結合するステップを含む、請求項63に記載の方法。
【請求項65】
前記比較するステップは、前記第1の放射線画像と前記第2の放射線画像または複数組の画像とを視覚的に比較するステップを含む、請求項61に記載の方法。
【請求項66】
調節するステップは、前記拘束デバイスの長さまたは緊張状態を調節するステップを含む、請求項52に記載の方法。
【請求項67】
前記背下部の棘突起の存在および形状を、それに前記拘束デバイスを結合するために評価するステップをさらに含む、請求項52に記載の方法。
【請求項68】
前記背下部内の面関節係合を評価するステップをさらに含む、請求項52に記載の方法。
【請求項69】
前記評価するステップは、関節突起の線状の重複を測定するステップを含む、請求項68に記載の方法。
【請求項70】
前記拘束デバイスを調節する前記ステップは、前記背下部内の少なくとも1つの面関節における面関節係合を増大させるために、該拘束デバイスを調節するステップを含む、請求項52に記載の方法。
【請求項71】
前記拘束デバイスを調節する前記ステップは、前記背下部内の少なくとも1つの面関節の過伸展または係止を防止するために、該拘束デバイスを調節するステップを含む、請求項52に記載の方法。
【請求項72】
前記背下部が、測定された特徴と再測定された特徴との比較に基づく前記閾値位置の位置、またはそれより下の位置にあるように前記患者の背下部を手術中に操作するステップをさらに含む、請求項52に記載の方法。
【請求項73】
前記操作するステップは、前記患者の背下部を、その中で脊柱前弯症を形成または増大させるように操作するステップを含む、請求項72に記載の方法。
【請求項74】
患者の背下部の変性脊椎すべり症を治療するための方法であって、該方法は、
該背下部を様々な曲げ位置に配置するために、該患者に指示を提供するステップと、
該様々な位置の該背下部の複数の画像を提供するステップと、
該患者の背下部内の面関節が亜脱臼し始める、該背下部の閾値位置を決定するステップと、
該閾値位置にある間に該患者の背下部の第1の画像を提供するステップと、
拘束デバイスを該患者の背下部に結合するステップと、
該拘束デバイスが該患者の背下部に結合された後に、手術中の該患者の背中の第2の画像を提供するステップと、
該第1の画像と該第2の画像とを比較するステップと、
該患者の背下部が、該第1の画像と該第2の画像との比較に基づく該閾値位置より下の位置にあり、それにより、該面関節の該亜脱臼が軽減または排除されるように該拘束デバイスを調節するステップと
を含む、方法。
【請求項75】
前記決定するステップは、疼痛が経験される時を示すための手段を前記患者に提供するステップを含む、請求項74に記載の方法。
【請求項76】
前記手段は、作動可能なスイッチを備える、請求項75に記載の方法。
【請求項77】
神経減圧を同時に実施するステップをさらに含む、請求項74に記載の方法。
【請求項78】
前記決定するステップは、前記患者の背下部の同時減圧によって、またはよらずに面関節の係合を評価するステップを含む、請求項74に記載の方法。
【請求項79】
前記第1の画像は、X線、MRI、またはCTスキャンのうちの1つを含む、請求項74に記載の方法。
【請求項80】
前記結合するステップは、前記拘束デバイスを上棘突起と、下棘突起または仙骨と係合するステップを含む、請求項74に記載の方法。
【請求項81】
前記拘束デバイスは、前記背下部の曲げに抵抗する力を提供するように適合される、請求項74に記載の方法。
【請求項82】
前記第2の画像は、X線を含む、請求項74に記載の方法。
【請求項83】
1つ以上の放射線不透過性マーカーを前記患者の背下部と係合するように配置するステップをさらに含む、請求項82に記載の方法。
【請求項84】
前記配置するステップは、前記放射線不透過性マーカーのうちの少なくとも1つを前記患者の背下部の棘突起と結合するステップを含む、請求項83に記載の方法。
【請求項85】
前記比較するステップは、前記第1の画像と、前記第2の画像、または複数の組の画像との間の椎骨板間の角度、棘突起間の距離、面関節係合、または弓根間の距離を比較するステップを含む、請求項74に記載の方法。
【請求項86】
前記比較するステップは、前記第1および前記第2の画像の背下部の特徴を定量化するためにキャリパまたは角度測定デバイスを使用するステップを含む、請求項74に記載の方法。
【請求項87】
前記比較するステップは、前記第1の画像と前記第2の画像とを視覚的に比較するステップを含む、請求項74に記載の方法。
【請求項88】
前記調節するステップは、前記拘束デバイスにおける長さまたは緊張状態を調節するステップを含む、請求項74に記載の方法。
【請求項89】
前記背下部の棘突起の存在および形状を、それに前記拘束デバイスを結合するために評価するステップをさらに含む、請求項74に記載の方法。
【請求項90】
患者の背下部痛を治療するための方法であって、該方法は、
該背下部痛が軽減または排除される位置に該患者の背下部を操作するステップと、
該位置を記録するステップと、
該患者の背下部において該位置を手術中に再現するステップと、
拘束デバイスを該背下部に結合するステップと
を含む、方法。
【請求項91】
前記操作するステップは、前記患者の背下部を手動で操作するステップを含む、請求項90に記載の方法。
【請求項92】
前記操作するステップは、前記患者の背下部において脊柱前弯症を形成または増大させるステップを含む、請求項90に記載の方法。
【請求項93】
前記操作するステップは、調節可能な腰部部材によって枠または椅子に前記患者を配置するステップを含む、請求項90に記載の方法。
【請求項94】
前記操作するステップは、股関節を曲げさせるステップを含む、請求項90に記載の方法。
【請求項95】
前記股関節を曲げさせるステップは、骨盤を前傾させるために大腿骨頭を通して近位方向に力を方向付け、それによって、前記患者の背下部において脊柱前弯症を形成または増大させるステップを含む、請求項94に記載の方法。
【請求項96】
膝を拘束するステップをさらに含む、請求項95に記載の方法。
【請求項97】
前記記録するステップは、疼痛が経験される時を示すための手段を前記患者に提供するステップを含む、請求項90に記載の方法。
【請求項98】
前記手段は、作動可能なスイッチを備える、請求項97に記載の方法。
【請求項99】
前記再現するステップは、前記患者の背下部を前記位置に手動で操作するステップを含む、請求項90に記載の方法。
【請求項100】
前記再現するステップは、前記患者の背下部において脊柱前弯症を形成または増大させるステップを含む、請求項90に記載の方法。
【請求項101】
前記結合するステップは、前記拘束デバイスを上棘突起と、下棘突起または仙骨と係合するステップを含む、請求項90に記載の方法。
【請求項102】
前記拘束デバイスは、前記背下部の曲げに抵抗する力を提供するように適合される、請求項101に記載の方法。
【請求項103】
前記位置にある前記患者の背下部の画像を提供するステップをさらに含む、請求項90に記載の方法。
【請求項104】
前記画像は、X線を含む、請求項103に記載の方法。
【請求項105】
前記位置を再現した後に、前記患者の背下部の手術中画像を提供するステップをさらに含む、請求項90に記載の方法。
【請求項106】
前記手術中画像は、X線、MRI、およびCTスキャンのうちの1つを含む、請求項105に記載の方法。
【請求項107】
放射線不透過性マーカーを前記患者の背下部と結合するステップをさらに含む、請求項90に記載の方法。
【請求項108】
前記放射線不透過性マーカーは、前記患者の背下部の棘突起と結合される、請求項107に記載の方法。
【請求項109】
前記患者の背下部の分節の可動域、分節安定性、線形剛性、または曲げ剛性を手術中に特徴付けるステップをさらに含む、請求項90に記載の方法。
【請求項110】
前記患者の背下部の前記特徴付けに基づいて、前記拘束デバイスを調節するステップをさらに含む、請求項109に記載の方法。
【請求項111】
前記調節するステップは、前記拘束デバイスにおける長さまたは緊張状態を調節するステップを含む、請求項110に記載の方法。
【請求項112】
前記患者の背下部の特徴付けを参照ガイドと比較するステップと、
該参照ガイドによって提供される情報に基づいて、前記拘束デバイスを調節するステップと
をさらに含む、請求項109に記載の方法。
【請求項113】
患者の脊椎すべり症を治療するための方法であって、
背下部を様々な曲げ位置に配置するように該患者に指示を提供するステップと、
該背下部の閾値位置を決定するステップであって、該閾値位置において、該患者は並進不安定性を経験しないか、または並進不安定性が軽減される、ステップと、
該閾値位置にある間の該患者の背下部の第1の画像または一組の画像を提供するステップと、
該第1の画像または該一組の画像から該患者の背下部の特徴を測定するステップと、
拘束デバイスを該患者の背下部に結合するステップと、
該患者の背下部の特徴を、それに結合された該拘束デバイスによって再測定するステップと、
該再測定された特徴を該測定された特徴と比較するステップと、
該患者の背下部が、測定の特徴と再測定された特徴との比較に基づく該閾値位置より下の位置にあり、それにより、該背下部の不安定性が軽減または排除されるように、該拘束デバイスを調節するステップと
を含む、方法。
【図1A】

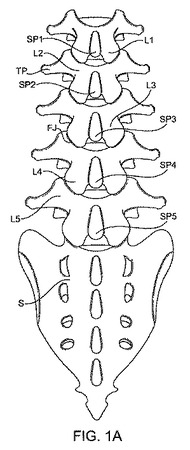
【図1B】
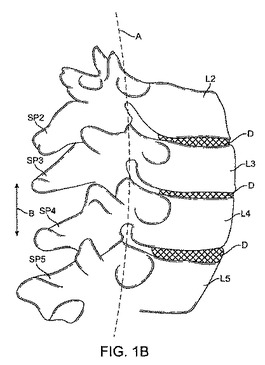
【図2】
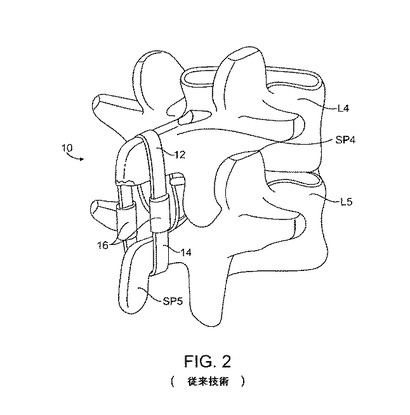
【図3A】
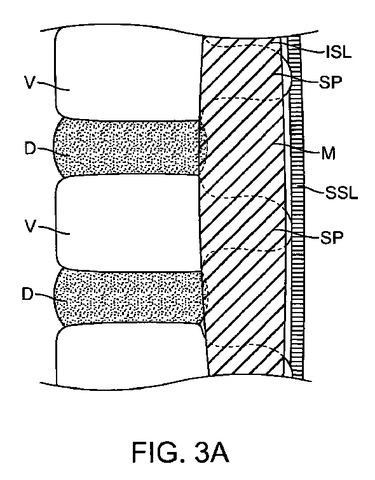
【図3B】
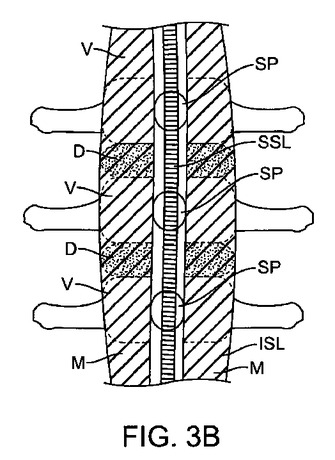
【図4A】
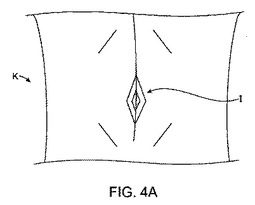
【図4B】
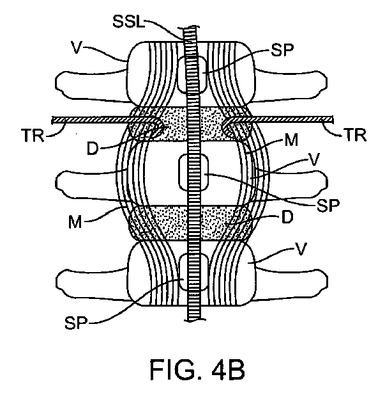
【図4C】
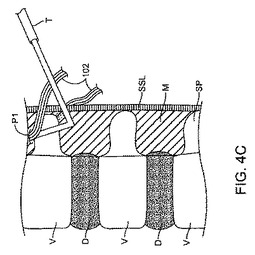
【図4D】
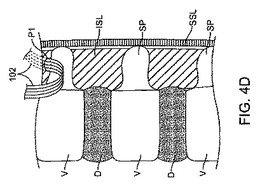
【図4E】
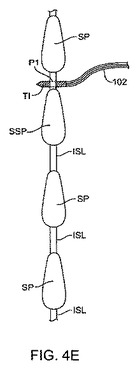
【図4F】
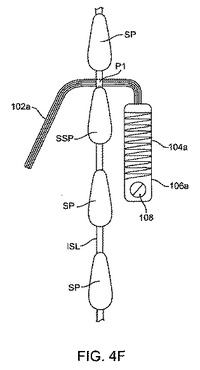
【図4G】
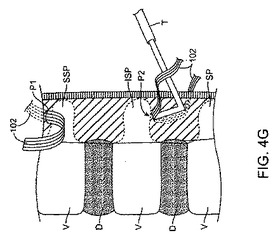
【図4H】
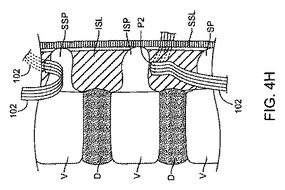
【図4I】
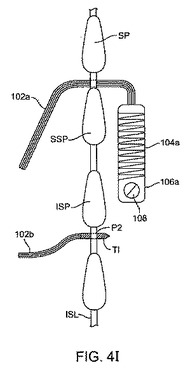
【図4J】
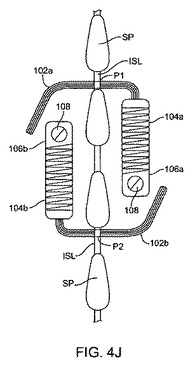
【図4K】
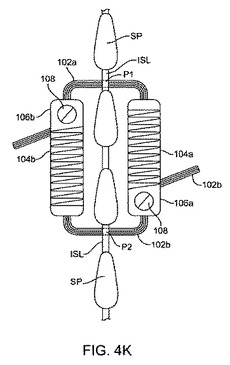
【図4L】
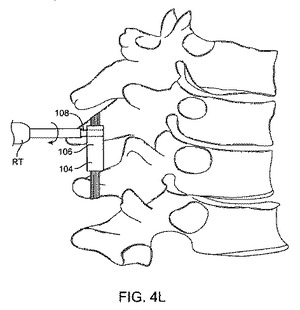
【図4M】
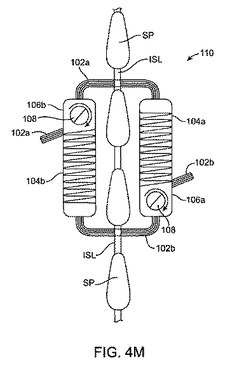
【図5A】
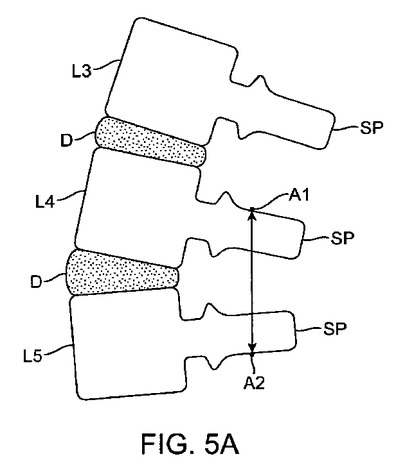
【図5B】
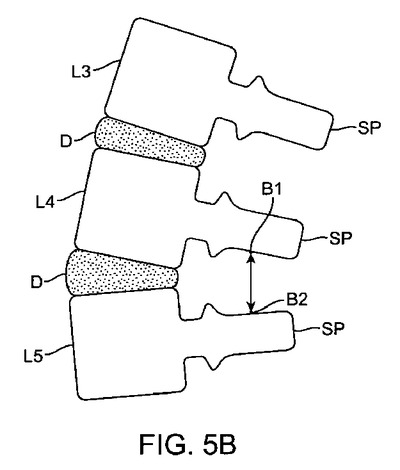
【図6A】
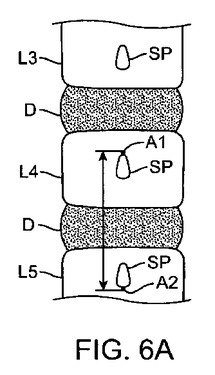
【図6B】
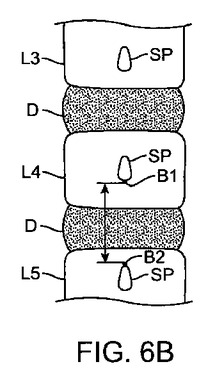
【図7A】
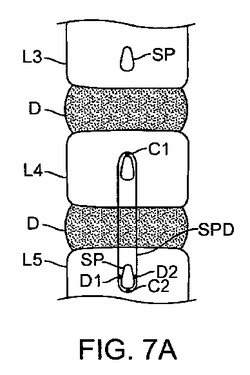
【図7B】
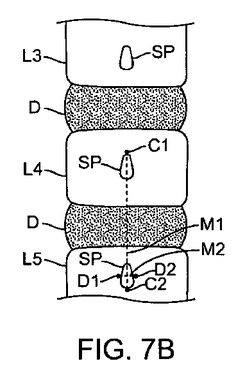
【図8A】
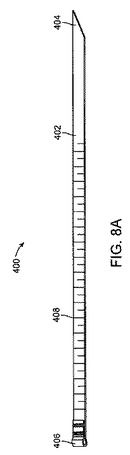
【図8B】
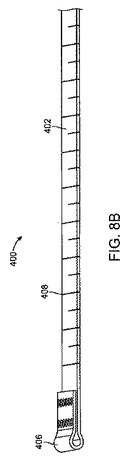
【図9A】
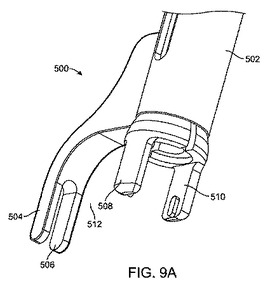
【図9B】
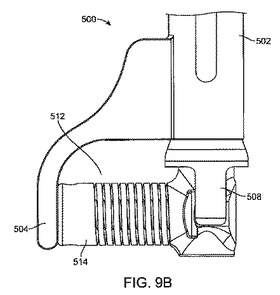
【図9C】
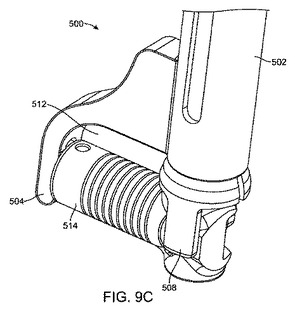
【図10A】
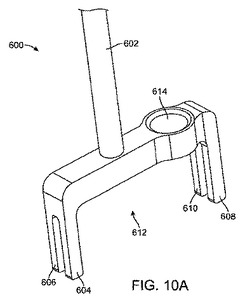
【図10B】
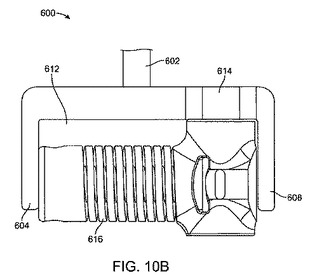
【図10C】
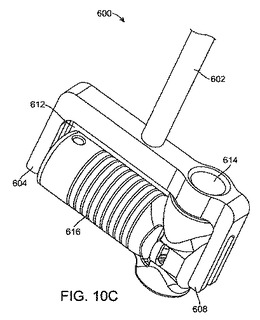
【図11A】
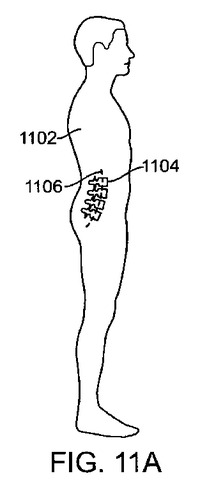
【図11B】
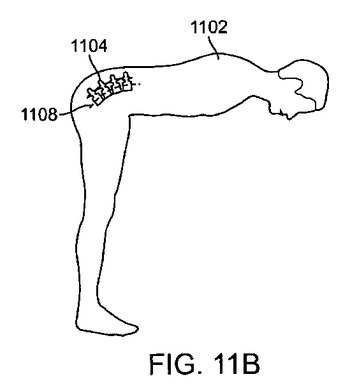
【図11C】
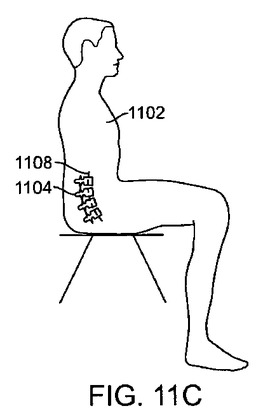
【図12A】
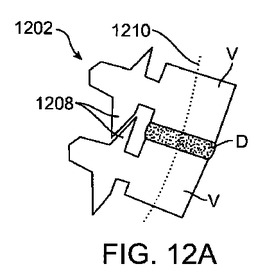
【図12B】
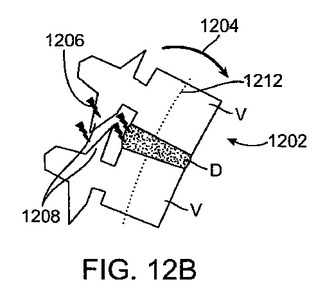
【図13A】
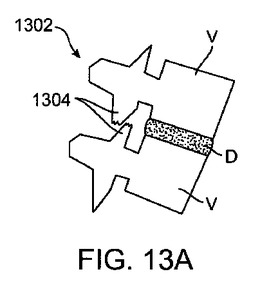
【図13B】
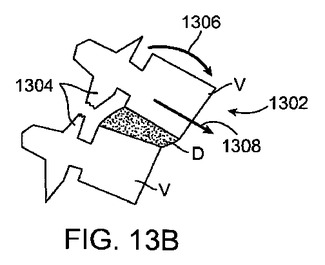
【図14A】
【図14B】
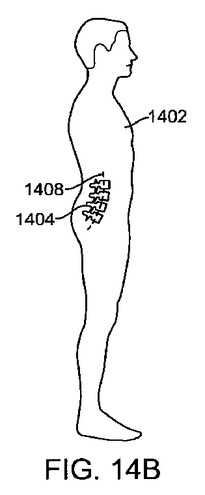
【図15A】
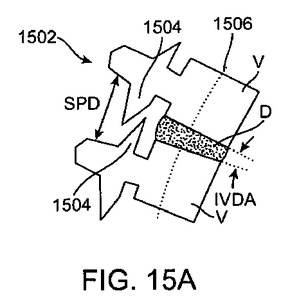
【図15B】
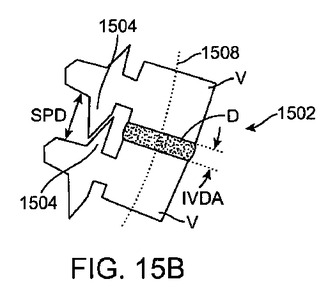
【図16A】
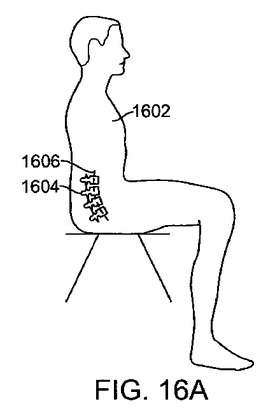
【図16B】
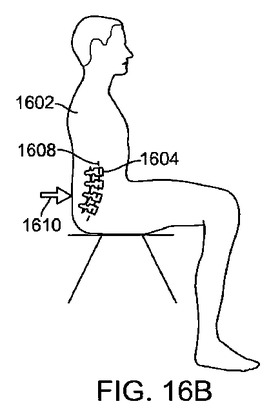
【図16C】
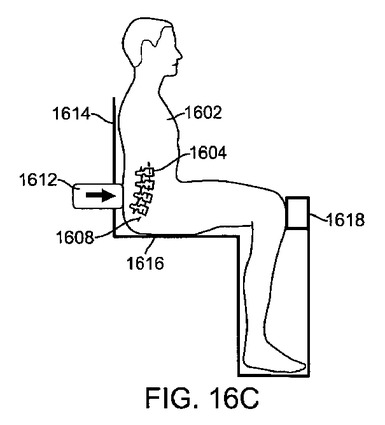
【図17】
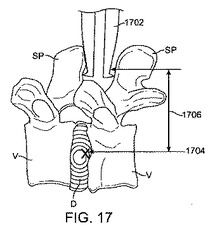
【図18】
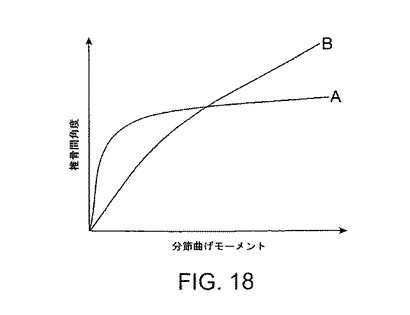
【図19】
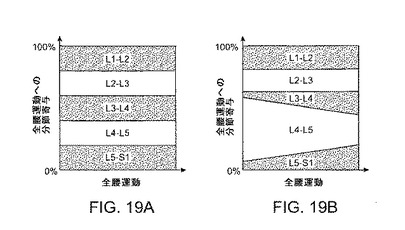
【図20】
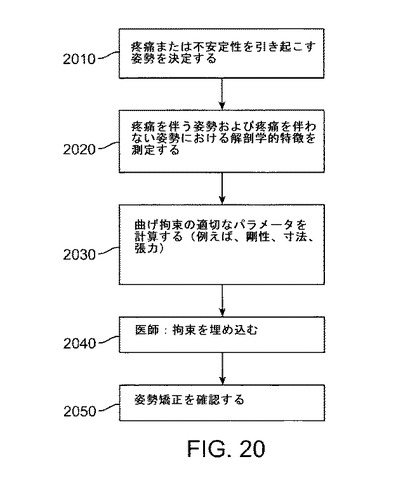
【図21A】
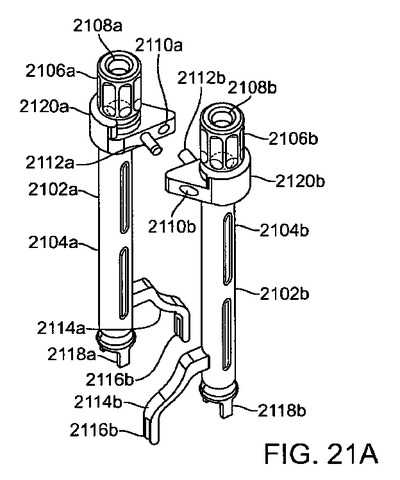
【図21B】
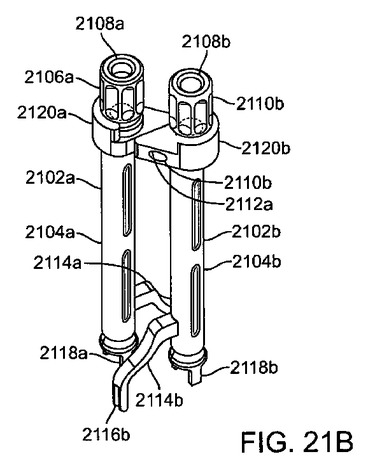
【図21C】
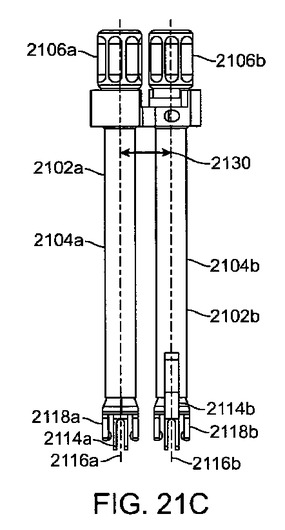
【図22】
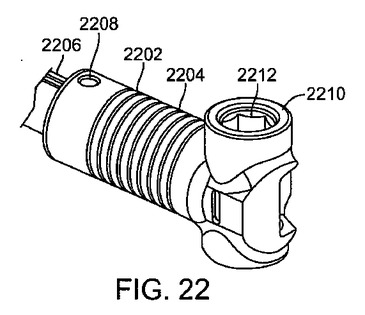
【図1B】
【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図4G】
【図4H】
【図4I】
【図4J】
【図4K】
【図4L】
【図4M】
【図5A】
【図5B】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図9C】
【図10A】
【図10B】
【図10C】
【図11A】
【図11B】
【図11C】
【図12A】
【図12B】
【図13A】
【図13B】
【図14A】
【図14B】
【図15A】
【図15B】
【図16A】
【図16B】
【図16C】
【図17】
【図18】
【図19】
【図20】
【図21A】
【図21B】
【図21C】
【図22】
【公表番号】特表2012−501748(P2012−501748A)
【公表日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2011−526200(P2011−526200)
【出願日】平成21年9月3日(2009.9.3)
【国際出願番号】PCT/US2009/055914
【国際公開番号】WO2010/028165
【国際公開日】平成22年3月11日(2010.3.11)
【出願人】(509108906)シンピライカ スパイン, インコーポレイテッド (13)
【Fターム(参考)】
【公表日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成21年9月3日(2009.9.3)
【国際出願番号】PCT/US2009/055914
【国際公開番号】WO2010/028165
【国際公開日】平成22年3月11日(2010.3.11)
【出願人】(509108906)シンピライカ スパイン, インコーポレイテッド (13)
【Fターム(参考)】
[ Back to top ]