
人形体の関節部材、それを用いる人形体
【課題】使用者の気に入ったポーズとなるように人形体の関節部を任意の屈曲状態に屈曲させるとともに、そのポーズを長期間保持する。
【解決手段】関節部材50の第1部材30を第2部材40に対して回転させて屈曲状態にした後で放置しても、保持部材10のピストンがシリンダ12内を移動して伸長状態に戻ろうとすると、ピストンの移動を阻止する移動阻止力として摩擦力、大気圧、圧縮応力がピストンに働く。その結果、これらの移動阻止力によってピストンの移動が阻止され、関節部材50は屈曲状態で長期間安定して保持することができる。
【解決手段】関節部材50の第1部材30を第2部材40に対して回転させて屈曲状態にした後で放置しても、保持部材10のピストンがシリンダ12内を移動して伸長状態に戻ろうとすると、ピストンの移動を阻止する移動阻止力として摩擦力、大気圧、圧縮応力がピストンに働く。その結果、これらの移動阻止力によってピストンの移動が阻止され、関節部材50は屈曲状態で長期間安定して保持することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人形体の関節部材、それを用いる人形体に関する。
【背景技術】
【0002】
従来、ロボット模型玩具などの人形体においては、人間の関節の動きを再現するために様々な工夫が施されている。例えば、胴部と両腕部との連結部(肩関節部)や胴部と両脚部の連結部(股関節部)あるいは肘や膝の関節部が自在に回転できるように球形の連結部材が用いられ、この連結部材によって肩、股、肘あるいは膝の関節部により自由度の高い動きが付与されている(例えば、特許文献1参照)。
【特許文献1】特開平6-327841号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
一般に、このような精巧な人形体は、使用者が自分の気に入ったポーズとなるように肘や膝などの関節部を屈曲させた後に、長期間鑑賞できるようにサイドボードなどの室内用展示棚に人形体を入れて保存されている。そのため、人形体には、使用者が決めたポーズに肘や膝を曲げた状態のままでその姿勢を長時間保持することが要求されていた。また、人形体の肘や膝の動きが人間の動きに類似して動くことも望まれていた。
【0004】
そこで、従来の人形体では、使用者の気に入ったポーズとなるように肘や膝などを屈曲できかつ使用者が気に入ったポーズで肘や膝を屈曲させたまま長期間保持できるように、かつ、屈曲、伸長を繰り返しても球状の連結部が磨耗しないように、球状の連結部を弾性変形しやすい軟質合成樹脂で形成していた。そして、球状の連結部(関節部)に嵌合する腕部や脚部の凹部に、球状の連結部を圧縮しながら嵌合し、軟質合成樹脂の弾力性を利用して使用者の決めたポーズに肘や膝を屈曲させたまま保持していた。
【0005】
このように、従来の球状の連結部には、使用者の気に入ったポーズとなるように肘や膝を自在に屈曲させる機能と、使用者の気に入ったポーズに肘や膝を屈曲させたまま長期間保持する機能の相反する2つの機能が要求されていた。しかしながら、軟質合成樹脂で形成された球状の連結部を使用する場合、人形体を使用者の気に入ったポーズに長時間保持しようとすると、ポーズによっては肘や膝が屈曲状態に耐えられず、肘が望む位置より徐々に下がったり膝が望む位置より徐々に曲がりすぎる問題を生じる場合があった。とくに上腕部、下腕部、大腿部が重い場合にこの傾向が顕著であった。
【0006】
本発明は、上記説明した従来技術の問題点を解決することを出発点としてなされたものである。その目的は、使用者の気に入ったポーズとなるように人形体の関節部を任意の屈曲状態に屈曲させるとともに、そのポーズを長期間保持することができる人形体の関節部材、それを用いる人形体を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明の人形体の関節部材は、以下の構成を有する。すなわち、人形体の関節部材であって、第1部材と、前記第1部材に回転可能に連結される第2部材と、前記第1部材に回転可能に接続されるピストンと、前記第2部材に回転可能に接続され、前記ピストンを前記ピストンの往復移動を可能に収容する、片端部が閉じられているシリンダと、を有することを特徴とする。
【0008】
ここで例えば、前記ピストンの先端部が前記シリンダの内径と略等しい外径を有し、前記ピストンの先端部以外の前記シリンダに収容可能な部分が前記シリンダの内径よりも小さい外径を有することが好ましい。
【0009】
ここで例えば、前記ピストンと前記シリンダとは弾性率が異なる弾性材料で製造されていることが好ましい。
【0010】
ここで例えば、前記弾性材料が合成樹脂であることが好ましい。
【0011】
ここで例えば、前記ピストンはABS樹脂で形成され前記シリンダはポリエチレン樹脂で形成されている、または前記ピストンはポリエチレン樹脂で形成され前記シリンダはABS樹脂で形成されていることが好ましい。
【0012】
また、本発明の人形体は、関節部が上記に記載の関節部材を使用して形成されていることを特徴とする。
【発明の効果】
【0013】
本発明によれば、使用者の気に入ったポーズとなるように人形体の関節部を任意の屈曲状態に屈曲させるとともに、そのポーズを長期間保持することができる関節部材、その関節部材を用いる人形体を提供することができる。
【発明を実施するための最良の形態】
【0014】
以下に、必要に応じて添付図面を参照しながら本発明の一実施形態の人形体の関節部材およびそれを用いる人形体について詳細に説明する。
【0015】
最初に、本明細書で肘や膝などの関節部で使用される関節部材の説明に使用する「伸長状態」と「屈曲状態」について定義する。例えば、膝の「伸長状態」とは、膝を伸ばした状態、すなわち、大腿部と脚部が略一直線上になる状態を指すものとする。また、膝の「屈曲状態」とは、膝を任意の角度に曲げた状態で大腿部と脚部とが略一直線上にない状態を指すものとする。また関節部材には、関節部材を任意の「屈曲状態」に移動したのちその状態で保持するための保持部材が使用されている。この保持部材は、片端部が閉じられている中空の円筒状のシリンダと、シリンダの内側にはまりこむ円筒状のピストンとから構成されている。なお本明細書では、ピストンの先端部をピストンヘッドと呼び、ピストンヘッドの外径より細い部分をピストンロッドと呼ぶことにする。
【0016】
<第1の実施形態>
[関節部材の特徴]
本実施形態の人形体の関節部材は、人形体の膝や肘などの関節部の動作が人間の動きに近くなるよう伸ばしたり曲げたりできるとともに、人形体の関節部を曲げたままの状態で長期間保持することができる点が特徴である。そのため、本実施形態の関節部材は、人形体の関節部を任意の角度に曲げるために第1部材と第1部材に回転可能に連結される第2部材とを使用し、さらに人形体の関節部を任意の角度に曲げたままの状態で保持するために保持部材を使用している。保持部材は、片端部が閉じられている中空円筒状のシリンダとシリンダの内側にはまりこむ円筒状のピストンとで構成されている。保持部材をシリンダとピストンとで構成としたのは、以下の2つの理由による。
【0017】
第1の理由は、シリンダ内でのピストンの位置の違いを利用して関節部材の機械的な「伸長状態」と「屈曲状態」とを再現するためである。関節部材の「伸長状態」とは、ピストンがシリンダの入口付近にあって、ピストンとシリンダの側壁および底壁とで作る閉空間(シリンダ内空間)が大きな容積を有する状態に相当し、関節部材が最も曲がった「屈曲状態」とはピストンがシリンダの底壁付近にあって、シリンダ内空間の容積がほとんど無い状態である。関節部材を「伸長状態」から最も曲がった「屈曲状態」にすると、ピストンは、閉空間(シリンダ内空間)がほとんど無くなるまでシリンダの奥に向かって移動する。
【0018】
第2の理由は「屈曲状態」にあるピストンをそのまま放置しても本実施形態の保持部材では、ピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧、圧縮応力)がピストンに働くため、この移動阻止力によってピストンが「屈曲状態」に長期間安定して保持されるためである。すなわち、ピストンが「屈曲状態」から「伸長状態」に戻ろうとすると、ピストンにはピストンの移動を阻止するように移動阻止力として摩擦力、大気圧が働く。ここで、ピストンに大気圧が移動阻止力として働くのは、ピストンがシリンダ内を移動して「伸長状態」に戻ろうとするとピストンとシリンダ内空間の体積が増加しようとするため、シリンダ内空間の圧力が大気圧(外圧)より低くなるためである。また、ピストンの外径がシリンダの内径がよりも少し大きい場合には、ピストンの移動阻止力として圧縮応力を更に加えることもできる。ここで、圧縮応力について説明すると、本実施形態のピストンとシリンダは異なる弾性率を有する弾性材料、例えば合成樹脂で作られている。具体的にはピストンは弾性変形しにくいABS樹脂で作られ、シリンダはピストンに比べて弾性変形しやすいPE樹脂で作られている(ピストンをPE樹脂でシリンダをABS樹脂で作っても良い)。そのため、ピストンの外径がシリンダの内径より少し大きいとピストンがシリンダ内を移動しようとすると圧縮変形したシリンダからピストンに対してピストンの移動を阻止するように圧縮応力が働く。
【0019】
このように、本実施形態の関節部材では、「屈曲状態」(関節部を曲げたままの状態)にあるピストンをそのまま放置してもピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧、必要に応じて圧縮応力)がピストンに働くため、この移動阻止力によってピストンの移動が阻止される。そのため本実施形態の関節部材は、長期間にわたり「屈曲状態」を安定して保持することができる。
【0020】
次に、本実施形態の保持部材(ピストンとシリンダ)を用いる関節部材およびその関節部材を用いる人形体について詳しく説明する。
【0021】
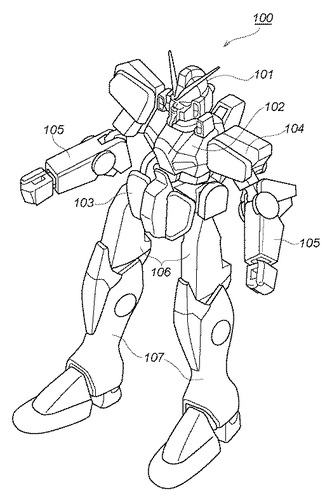
<人形体の外観構成:図1>
図1は本実施形態の保持部材を用いる関節部材を使用した人形体100の外観構成を示す斜視図である。同図において、101は頭部、102は胸部、103は腰部、104は上腕部、105は下腕部、106は大腿部、107は脚部である。
【0022】
人形体100において、本実施形態の関節部の保持部材を用いる関節部材は様々な関節部で使用されている。例えば、大腿部106と脚部107を接続する膝の関節部分、上腕部104と下腕部105を接続する肘の関節部分で使用されている。その他にも本実施形態の関節部材は、例えば、腰部103と大腿部106を接続する股関節部分あるいは胸部102と上腕部104を接続する肩関節部分などでも使用することができる。
【0023】
以下の説明では、本実施形態の関節部材として膝の関節部分で使用する関節部材を例に説明するが、以下の説明は、例えば、肘の関節部分、肩関節および股関節部分などの他の部分の関節部にも適用することができる。
【0024】
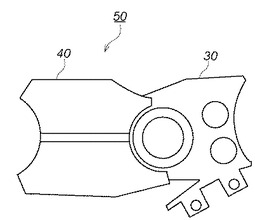
<関節部材:図2〜図4>
図2は本実施形態の人形体100の膝の関節部で使用する関節部材50の一例を示す外観図である。図2では、膝が伸びた「伸長状態」の場合の第1部材30と第2部材40の配置を示している。膝の関節部材50は、第1部材30と第2部材40とから構成され、第1部材30および第2部材40はそれぞれ大腿部と脚部または脚部と大腿部に接続される。なお第1部材30には第1部材30と第2部材40とを回転可能に連結する連結部(図3の回転軸31)が配置され、第1部材30と第2部材40の内部にはピストンとシリンダからなる保持部材10(図3参照)が配置されている。
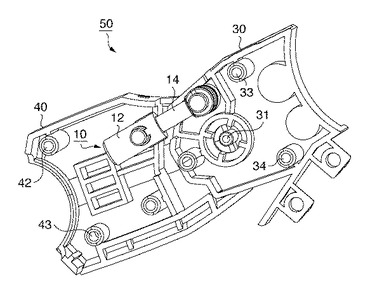
【0025】
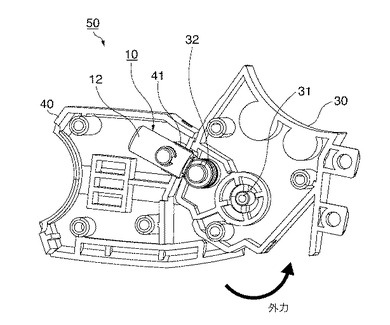
図3は、図2の関節部材50の上部ハウジングを取り外した関節部材50の内部構造を示す図である。図3に示すように、第1部材30と第2部材40とは連結部である回転軸31によって回転可能に連結されている。第1部材30と第2部材40には保持部材10のピストン14とシリンダ12を固定する固定部がそれぞれ配置され、保持部材10は各固定部によって第1部材30と第2部材40に固定されている。本実施形態の関節部材50では第1部材30が第2部材40に対して回転軸31を軸として回転することにより、膝が伸びた「伸長状態」から膝を曲げた「屈曲状態」に変更することができる。また、保持部材10は第1部材30が第2部材40に対して回転軸31を軸として回転するときに、第1部材30の回転運動に連動してピストン14がシリンダ12内を往復移動する。そのため、保持部材10は、第1部材30が第2部材40に対して回転運動する動きに連動するシリンダ内の直線的な往復移動により、膝を伸ばした「伸長状態」から膝を曲げた「屈曲状態」に変更することができる。
【0026】
さらに、本実施形態の保持部材10は、「屈曲状態」にあるピストンをそのまま放置したときにピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧など)がピストンに働く。そのため、この移動阻止力によってピストンを「屈曲状態」に長期間安定して保持することができる。以下、本実施形態の関節部材50で用いられる保持部材10の動作について詳しく説明する。
【0027】
まず、図3を用いて、保持部材10の構成について説明する。保持部材10は、ピストン14とシリンダ12とから構成され、ピストン14は第1部材30に、シリンダ12は第2部材40にそれぞれ回転可能に固定されている。
【0028】
次に、シリンダ12内のピストン14の位置の違いを利用して、保持部材10が膝の「伸長状態」を「屈曲状態」に変更することができる点について詳しく説明する。図3は保持部材10が膝の「伸長状態」を示すときの関節部材50中の第1部材30と第2部材40の配置を示す図である。同図において、第1部材30には、回転軸31、ピストン係合部32(図4参照)、ハウジング固定部33、34などが配置されている。回転軸31は第1部材30と第2部材40を連結し、第1部材30を第2部材40に対して回転して「伸長状態」から「屈曲状態」に変更するための回転軸である。ピストン係合部32は、保持部材10のピストン14を回転可能に固定する中空の円筒形状であり、図3にはその形状は示されていないが、中空円筒形状のハウジング固定部33、34と類似する形状であり高さのみが異なるものである。
【0029】
一方、第2部材40には、シリンダ係合部41(図4参照)、ハウジング固定部42、43などが配置されている。シリンダ係合部41は、保持部材10のシリンダ12を回転可能に固定する中空の円筒形状であり、図3にはその形状は示されていないが、中空円筒形状のハウジング固定部42、43と高さのみが異なるものである。
【0030】
図3に示されるように、保持部材10が膝の「伸長状態」を示すときは、関節部材50中の第1部材30と第2部材40とは略直線上に配置されている。この時の保持部材10のピストン14とシリンダ12の位置の関係は、ピストン14のピストンヘッド(図7参照)がシリンダ12の入口付近に挿入され、ピストン14の軸部分がシリンダ12の外に置かれた状態である。
【0031】
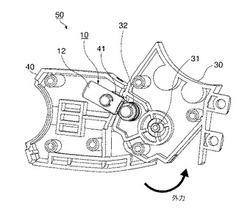
次に、図4を用いて保持部材10が膝の「屈曲状態」を示すときの関節部材50の第1部材30と第2部材40の配置について説明する。図4は、使用者が図3に示すような第1部材30と第2部材40とが略直線上に配置された「伸長状態」にある関節部材50に図4の矢印に示すような方向の外力Fを与え、第1部材30を第2部材40に対して回転軸31を軸として回転させて「屈曲状態」にしたときの第1部材30と第2部材40の配置を示している。すなわち、図3に示す「伸長状態」から図4に示す外力Fが第1部材30に与えられると、第1部材30は回転軸31を軸として第2部材40に対して回転して図4に示す「屈曲状態」の位置(最も曲がった状態)に移動する。なお図4に示す最も曲がった状態の「屈曲状態」の位置は一例であり、使用者が加える外力の大きさを調節することにより任意の「屈曲状態」に移動することができる。
【0032】
図4に示す最も曲がった「屈曲状態」では、保持部材10のピストン14はシリンダ12の内部の最も奥までに挿入された状態となっている。つまり、外力Fが第1部材30に図4の矢印の方向にかかると、外力Fによって第1部材30は回転軸31を軸として第2部材40に対して回転し、それと同時に外力Fが保持部材10のピストン14に伝達され、ピストン14にはシリンダ14の内部方向にピストン14を移動させる外力Fが作用する。その結果、ピストン14は、加えられた外力Fによってシリンダの奥に向かって移動し、ピストン14とシリンダ12の距離が縮まり、図4に示すようにピストン14とシリンダ12の位置が変化する。
【0033】
このように、本実施形態の関節部材50では、第1部材30は第2部材40に対して回転可能に連結され、保持部材10のピストン14とシリンダ12とは、第1部材30と第2部材40にそれぞれ回転可能に固定される。そして、第1部材30に外力Fを与えると、第1部材30は第2部材40に対して任意の角度に回転されると共にピストン14がその回転範囲をシリンダ12の往復移動できる範囲の長さに制限することで、関節部材50の動きを人間の関節の動きに近い動きとなるように制御することができる。
【0034】
なお、本実施形態の関節部材50は、上記説明したように「伸長状態」にある関節部材50に外力を加えて「屈曲状態」に容易に変更することができるとともに、「屈曲状態」のままで長期間放置しても長期間にわたり「屈曲状態」を安定して保持することができる。これは、保持部材10が片端部を閉じた中空円筒状のシリンダ12で形成され、シリンダ12の側壁の内径と略等しい外径を持つ円筒状のピストン14がシリンダ12内を移動するときにシリンダ内に密閉空間が形成され、かつピストン14がシリンダと弾性率の異なる弾性材料で作られているためである。そのため、「屈曲状態」で放置されたピストン14がシリンダ12内を移動して「伸長状態」に戻ろうとすると、ピストン14には移動を阻止する移動阻止力として摩擦力、大気圧、圧縮応力がピストン14に働くため、この移動阻止力によって長期間にわたり「屈曲状態」を安定して保持することができる。なお摩擦力、大気圧による移動阻止力の説明は、図7〜図9を用いて詳細に説明するのでここでの説明は省略する。
【0035】
<関節部材の各部材に使用する素材>
次に、上記説明した関節部材50の製造方法について説明する。なお、下記の説明では、本実施形態の説明に必要な部分についてのみ説明し、本実施形態の説明に不要な部分の説明や公知技術についての説明は省略する。
【0036】
まず、関節部材50の第1部材30、第2部材40および保持部材10の製造に適した素材について説明する。
【0037】
関節部材50を構成する第1部材30や第2部材40は、玩具の製造に使用可能な公知の合成樹脂を用いて製造することができる。合成樹脂の一例を示せば、ポリスチレン樹脂であるが、ポリスチレン樹脂に限ることなく、玩具の製造に使用可能な合成樹脂であればどのような合成樹脂を用いて製造することができる。
【0038】
保持部材10のピストン14やシリンダ12は、弾性変形可能な弾性材料のうち、弾性率の異なる弾性材料をピストン14とシリンダ12に用いて作製する必要がある。弾性材料の一例を示せば、合成樹脂であり、ピストン14に用いる合成樹脂としてシリンダ12に用いる合成樹脂よりも弾性変形しにくい高弾性の合成樹脂を用い、シリンダ12に用いる合成樹脂として弾性変形しやすい低弾性の合成樹脂を用いて作製することが好ましい。ただし、ピストン14とシリンダ12とは弾性率の異なる弾性材料を用いて作製すればよく、ピストン14に用いる合成樹脂をシリンダ12に用いる合成樹脂よりも弾性変形しやすいようにすることも可能である。
【0039】
ピストン14に用いる合成樹脂がシリンダ12に用いる合成樹脂よりも弾性変形しにくい合成樹脂の組み合わせの例として、例えば、ピストン14を弾性変形し難いABS樹脂(アクリロニトリル・ブタジエン・スチレン共重合合成樹脂)で作製し、シリンダ12を弾性変形しやすいPE樹脂(ポリエチレン樹脂)で作製する例があげられる。ただし、この組み合わせは一例であり、上記の条件を満たすものであればどのような合成樹脂の組み合わせを使用しても良い。
【0040】
また、ピストン14に用いる合成樹脂がシリンダ12に用いる合成樹脂よりも弾性変形しやすい合成樹脂の組み合わせの例として、例えば、ピストン14を弾性変形しやすいPE樹脂で作製し、シリンダ12を弾性変形しにくいABS樹脂で作製する例があげられる。
【0041】
上記説明したように、本実施形態の保持部材10では、例えばシリンダ12がピストン14に比べて弾性変形しやすいような弾性率の異なる合成樹脂などの弾性材料を用いて作製する必要がある。その理由の1つは、本実施形態の関節部材50が「伸長状態」から外力Fを与えて「屈曲状態」に移動させようとするとき、ピストンがシリンダの中を移動可能とするためである。この点について以下説明する。
【0042】
本実施形態の保持部材10では、「屈曲状態」で関節部材50を長期間保持する移動阻止力として摩擦力を利用するために、ピストン14をシリンダ12と密着させながらシリンダ12の内部方向へ移動可能とする必要がある。そのためにピストン14の先端部であるピストンヘッドの外径をシリンダ12の内径と略同じにしてある。このため、ピストン14がシリンダ12の側壁に接しながらシリンダ12の内を移動しようとすると、ピストン14の移動方向と逆の方向にピストン14の移動を阻止するような摩擦力を作用させることができる。すなわち、本実施形態のピストン14では、ピストンヘッドの外径とシリンダ12の内径とを略同じ径としてピストンヘッドをシリンダ12に接触させることによりその界面に摩擦力を発生させかつ摩擦力以上の外力がかかったときにのみピストンが移動させることができるようになっている。
【0043】
しかしながら、ピストン14がシリンダ12内を一直線上に移動せず少し直線上からずれて移動する場合には、ピストン14の移動方向でピストン14と接触するシリンダ12の側壁がピストン14の移動を阻止してピストンの移動が阻止されるおそれがある。また、ピストンヘッドの外径とシリンダ12の内径とを略同じ径として成形するが、生産上の誤差が生じることは避けられない。そこで、本実施形態の保持部材10では、たとえば、シリンダ12をピストン14よりも弾性変形しやすい材料を用いて作製している。そのため、ピストン14の移動方向にシリンダ12が接触してシリンダ12の側壁がピストン14の移動を阻止しようとする場合、ピストン14にかかった外力により接触部分のシリンダ12が弾性変形するためピストン14の移動を可能にすることができる。また、生産上の誤差により、ピストンヘッドの外径がシリンダ12の内径よりも大きくなったとしても、シリンダ12が弾性変形できるため、シリンダ12にピストン14をはめることができないということがない。例えば、シリンダ12をPE樹脂で作製し、ピストン14をPE樹脂より弾性変形しにくいABS樹脂で作製することで、ピストン14のシリンダ12内への移動を容易にすることができる。
【0044】
このように、本実施形態の保持部材10では、ピストン14をシリンダ12と異なる弾性率を有する弾性材料、例えばシリンダ12がピストン14に比べて弾性変形しやすい材料で作製している。その結果、本実施形態の保持部材10では、ピストン14をシリンダ12上で移動させるとき、ピストン14がシリンダ12の直線上から少しずれて移動する場合や、ピストン14とシリンダ12の寸法に生産上の誤差が生じている場合でもシリンダ12が弾性変形してピストン14のシリンダ12内での移動を容易にすることができる。そのため、本実施形態の保持部材10は、外力をかけることで「伸長状態」から「屈曲状態」に変更することができる。なお上記説明は、ピストン14の外径がシリンダ12の内径よりも少し大きい場合にも適用される。
【0045】
<関節部材の製造方法:図5>
次に、関節部材50の製造方法について説明する。図2と図3に一例を示す関節部材50は、まず、第1部材30、第2部材40および保持部材10(ピストン14とシリンダ12)に適した素材を選択する。各部材に適した素材は、上記説明した素材の中から関節部材50と人形体100の大きさを加味して選択する。
【0046】
次に、選択した素材を用いて第1部材30、第2部材40およびピストン14とシリンダ12を成形技術で成形するために図2や図3に示す形状に成形するための金型を設計し製造する。そして、選択した各素材と製造した金型を用いて、射出成形技術や鋳込み成形技術などの公知の成形技術を用いてそれぞれの部材を成形する。最後に、成形技術を用いて作製した各部材を組み合わせることにより図2に示す関節部材50が完成する。
【0047】
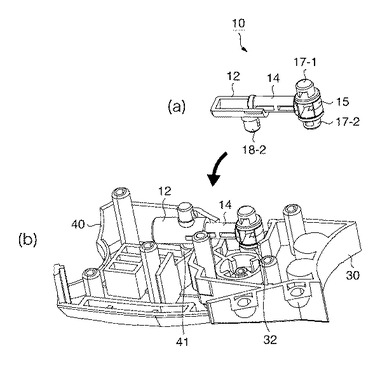
図5は、上記説明した成形技術を用いて作製された第1部材30、第2部材40、ピストン14およびシリンダ12から関節部材50の組立方法を説明する図である。なお、図5の(a)は、ピストンの挿入位置を表示するためピストンとシリンダの上半分を取り除いた図である。まず、図5の(a)に示すように、ピストン14をシリンダ12の予め決められた位置まで挿入して「伸長状態」の保持部材10を組み立てる。
【0048】
次に、第2部材40を第1部材30の回転軸31に回転可能に連結し、次に、第1部材30と第2部材40とを図5の(b)に示すように略直線上の位置に配置して「伸長状態」にする。次に、図5の(a)に示す「伸長状態」に配置した保持部材10を図5の(b)に示すように第1部材30と第2部材40に取り付ける。すなわち、第1部材30のピストン係合部32にピストン14のピストン突起部17−2を挿入して回転可能に接続し、第2部材40のシリンダ係合部41にシリンダ12のシリンダ突起部18−2を挿入して回転可能に接続する。このようにして、保持部材10を第1部材30と第2部材40とに連結する。最後に第1部材30と第2部材40にそれぞれハウジング部を取り付けることにより図2に示す関節部材50が完成する。なお、図5の(b)は図3を斜めから見た図に相当するので、図5より図3の「伸長状態」における第1部材30、第2部材40、保持部材10の接続関係を別の角度から把握することができる。
【0049】
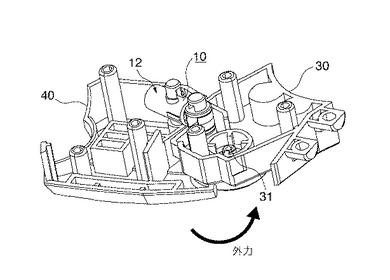
なお、図5の(b)に示す配置状態(「伸長状態」)の関節部材50を最大角度まで曲げて「屈曲状態」とした状態を図6に示す。図6は図4を斜めから見た図に相当するので、図6より図4の「屈曲状態」における第1部材30、第2部材40、保持部材10の接続関係を別の角度からすることができる。
【0050】
<摩擦力と、大気圧を利用した保持部材の保持方法:図7〜9>
次に、図7〜9を用いて関節部50を「伸長状態」から「屈曲状態」に移動した後で、本実施形態の保持部材10が移動阻止力として摩擦力と大気圧を利用して、「屈曲状態」のままで長期間安定して関節部50を保持することができる理由について説明する。
【0051】
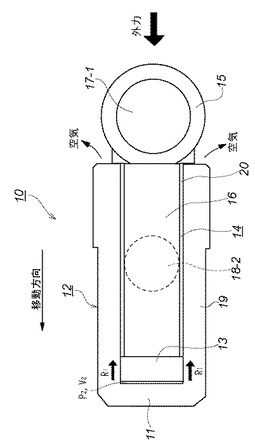
まず、図7を用いて保持部材10の詳細な構成について説明する。図7は、図3で説明した関節部材50が「伸長状態」の場合の保持部材10のピストン14とシリンダ12の配置構成を示す断面図である。
【0052】
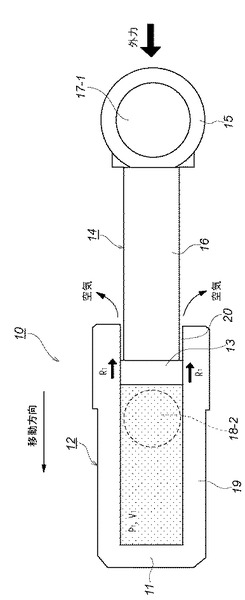
図7に示すようにピストン14は、円柱状の先端部であるピストンヘッド13、ピストンヘッドより外径の小さい外径を有するピストンロッド16、ピストン基部15、ピストン14を第1部材30に回転可能に接続するピストン突起部17−1、17−2から構成されている。ピストン14を構成する各部分は、例えば、ABS樹脂を用いて射出成形により一体成形で作製される。
【0053】
一方、シリンダ12は、片端部が底壁11によって閉じられた中空の円筒状の側壁19を有し、シリンダ12を第2部材に回転可能に固定するシリンダ突起部18−1、18−2を備えている。シリンダ12を構成する各部分は、例えば、PE樹脂を用いて射出成形により一体成形で作製される。また、ピストンヘッド13の外径は、シリンダ12の側壁19と略等しい径を有し、シリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部には閉空間、すなわちシリンダ内部が形成される。また、ピストンロッド16の外径は、ピストンヘッド13の外径、すなわち、シリンダ12の側壁19の径よりも小さくなっているため、ピストンロッド16とシリンダ12の側壁19の間には隙間20が形成されている。このことにより、ピストン14とシリンダ12とが接触する面に過剰な摩擦力が生じて、保持部材10の保持力が強くなりすぎて、関節部材50の「伸長状態」から「屈曲状態」に変更できなくなってしまわないように調節されている。すなわち、ピストン14上における、ピストンヘッド13の部分とピストンロッド16の部分の比率を変更することにより、ピストン14とシリンダ12の間に生じる摩擦力を調節している。
【0054】
次に、図7〜図9を用いて、本実施形態の保持部材10を「伸長状態」から「屈曲状態」に移動した後、「屈曲状態」で関節部材50を長期間安定して保持することができる理由について説明する。なお、以下の説明では、ピストンヘッド13の外径がシリンダ12の側壁19の内径と略等しく、ピストンヘッド13がABS樹脂で作製され、シリンダ12がピストンヘッド13より弾性変形しやすいPE樹脂で作製された保持部材10を例に用いて説明する。
【0055】
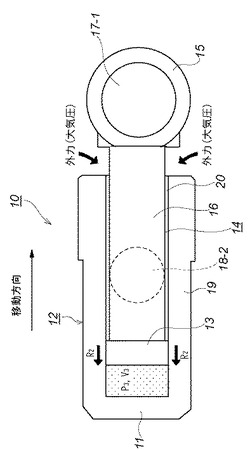
図7は、保持部材10が「伸長状態」の場合のピストン14とピストンヘッド13の位置関係を示している。一方、図8は、「伸長状態」にある保持部材10に外力Fが加えられてピストンヘッド13が最終的にシリンダ12の底壁11の近くまで移動した状態(関節部材50が最大曲がった「屈曲状態」)の場合のピストン14とピストンヘッド13の位置関係を示している。
【0056】
まず、図7を用いて保持部材10の「伸長状態」について説明すると、「伸長状態」ではピストンヘッド13はシリンダ12の入り口付近に配置される。このときシリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部に形成されるシリンダ内部容積V1に圧力P1(P1は大気圧)の空気があるとする。図の位置は、ピストンヘッド13が再現良く安定してシリンダ12内を往復移動可能な位置であり、図の位置よりピストンヘッド13をシリンダ12の入り口付近に近づいて配置するとピストンヘッド13の往復移動の安定性が低下するので好ましくない。また、図の位置よりピストンヘッド13をシリンダ12の底壁11側に近づけるとピストンヘッド13の移動距離が減り、関節部50の曲がる角度が低下するので好ましくない。
【0057】
また、図8は、「伸長状態」にある保持部材10に外力Fを加えるとピストンヘッド13がシリンダ12の底壁11に向かって移動し、最終的にピストンヘッド13がシリンダ12の底壁11の近くまで移動した時(最大に屈曲させた状態)のピストンヘッド13と底壁11との位置関係を示している。このときのシリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部に形成されるシリンダ内部容積をV2、圧力をP2とする。図の位置は、保持部材10を最大に屈曲させた状態の位置である。この位置を図の位置よりシリンダ12の入り口付近に近づいて配置するとピストンヘッド13の移動距離が減るため好ましくない。
【0058】
一方、図9は、保持部材10を図8で最大に屈曲させた状態にした後で放置した場合に、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧、圧縮応力)がピストンヘッド13に働いて、ピストンヘッド13がこの移動阻止力によって移動できず、図8に示す最大に屈曲させた状態に保持されてピストンヘッド13を最大に屈曲させた状態に長期間安定して保持できる点について説明する説明図である。図9は、図8に示す最大に屈曲させた状態から図9に示す位置に変化しようとするときのピストンヘッド13と底壁11との位置関係を示している。このときのシリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部に形成されるシリンダ内部容積をV3、圧力をP3とする。
【0059】
次に、図7〜図8を用いて、外力Fをかけてピストンヘッド13をシリンダ12の入口部から底壁11に近づけるように移動させるときの動作について説明する。
【0060】
図7に示すように、シリンダ内部容積V1、圧力P1(大気圧)の「伸長状態」にある保持部材10に外力Fを加えて、図8に示すように、容積V2、圧力P2の最大の屈曲状態まで保持部材10を移動しようとすると、図7に示すようにシリンダ12と接触するピストンヘッド13の表面に摩擦力R1がピストンヘッド13の移動を阻止する移動阻止力として働く。そのため、摩擦力R1が外力Fより大きいとピストンヘッド13の移動は阻止される。
【0061】
しかしながら、外力Fが摩擦力R1より大きい場合には、ピストンヘッド13は摩擦力R1に打ち勝って底壁11に近づく方向に移動する。すると、シリンダ内部容積はV1からV2に減少し、シリンダ内部の圧力は、V1/V2倍に増加する(例えば、V1/V2=10、P1=1気圧とすると、シリンダ内部の圧力P2は10気圧となる)。このようにシリンダ内部の圧力が増加すると、ピストン14とシリンダ12はそれぞれ圧縮応力を受けて圧縮変形する。このとき、ピストン14に比べて変形しやすい材料で作られているシリンダ12は大きく圧縮変形する。そのため、外力によりピストンヘッド13が底壁11に向かって移動し、シリンダ内部の容積が減少しそれに伴ってシリンダ内部の空気の圧力が増加しシリンダ内部の高圧の空気はピストン14とシリンダ12の隙間20から大気中に放出される。その結果、図8に示すように、容積V2の最大の屈曲状態まで保持部材10を移動した場合でも大部分の空気は大気中に放出されシリンダ内部の容積V2の空気圧力P2は大気圧に近い圧力に保持される。
【0062】
一方、図9は、保持部材10を図8で最大に屈曲させた状態にした後で外力Fを除去しした後でそのまま放置した場合、ピストンヘッド13が図8に示す状態容積V2から図9に示す位置(容積V3)に移動しようとするときにピストンヘッド13の移動を阻止する移動阻止力を説明する図である。
【0063】
図9に示すように、最大の屈曲状態での容積をV2とし、そのときの圧力P2は大気圧に近い圧力とする。このとき、保持部材10を図8の状態から図9の状態(V3、P3)に移動しようとすると、摩擦力R2がピストンヘッド13の移動を阻止する移動阻止力として働く。
【0064】
さらに、シリンダ内部容積はV2からV3に増加するため、シリンダ内部の圧力は、V2/V3倍に減少する(例えば、V2/V3=0.1P2=1気圧とすると、シリンダ内部の圧力はP3=0.1気圧となる)。このようにシリンダ内部の圧力が減少すると、ピストンヘッド13にはシリンダ内部の圧力より大きい大気圧がピストンヘッド13の移動を阻止する移動阻止力として働く。この結果、ピストンヘッド13には摩擦力R1と大気圧とがピストンヘッド13の移動を阻止する移動阻止力として働くためピストンヘッド13の移動が阻止される。
【0065】
なお、図7に示す本実施形態の保持部材10において大気圧がピストンヘッド13の移動を阻止する移動阻止力として働くことを確認するため、図7の保持部材10と、図7の保持部材10の底壁11のみを除去した比較例の保持部材を作製した。そして本実施形態の保持部材10と比較例の保持部材に外力を与えて「伸長状態」から「屈曲状態」にするためピストンをシリンダ内を移動させた後、「屈曲状態」のピストンに対してピストンがシリンダの入口方向に移動するように外力(図7の外力と反対方向)を与えてピストンの移動開始時の外力の大きさを比較した。その結果、本実施形態の保持部材10の移動開始時の外力は比較例の保持部材の移動開始時の外力よりも大きいことがわかった。このことから、本実施形態の保持部材10では上記説明した大気圧がピストンの移動を阻止する移動阻止力として効果的に作用することが確認できた。
【0066】
このように、本実施形態の保持部材10は、「屈曲状態」にあるピストンをそのまま放置しても「屈曲状態」のピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力として摩擦力、大気圧、圧縮応力がピストンに働くため、この移動阻止力によってピストンの移動が阻止される。そのため本実施形態の関節部材は、長期間にわたり「屈曲状態」(膝や肘等を曲げたままの状態)を安定して保持することができる。
【図面の簡単な説明】
【0067】
【図1】本発明の関節部材を用いた人形体の一例を示す外観構成を示す斜視図である。
【図2】本発明の関節部材の外観を示す正面図である。
【図3】本発明の関節部材の「伸長状態」における内部構造を示す略正面図である。
【図4】本発明の関節部材の最大の「屈曲状態」における内部構造を示す略正面図である。
【図5】本発明の関節部材の組立方法を説明する図である。
【図6】本発明の関節部材の最大の「屈曲状態」における内部構造を示す斜視図である。
【図7】本発明の関節部の保持部材の「伸長状態」における内部構造を示す断面図である。
【図8】本発明の関節部の保持部材の最大の「屈曲状態」における内部構造を示す断面図である。
【図9】本発明の関節部の保持部材が最大の「屈曲状態」から「伸長状態」に戻ろうとするときの内部構造を説明する図である。
【符号の説明】
【0068】
10 保持部材
11 底壁
12 シリンダ
13 ピストンヘッド
14 ピストン
15 ピストン基部
16 ピストンロッド
17−1 ピストン突起部
17−2 ピストン突起部
18−1 シリンダ突起部
18−2 シリンダ突起部
19 側壁
20 隙間
30 第1部材
31 第1部材の回転軸
32 ピストン係合部
33 固定部
40 第2部材
41 シリンダ係合部
42 固定部
100 人形体
【技術分野】
【0001】
本発明は、人形体の関節部材、それを用いる人形体に関する。
【背景技術】
【0002】
従来、ロボット模型玩具などの人形体においては、人間の関節の動きを再現するために様々な工夫が施されている。例えば、胴部と両腕部との連結部(肩関節部)や胴部と両脚部の連結部(股関節部)あるいは肘や膝の関節部が自在に回転できるように球形の連結部材が用いられ、この連結部材によって肩、股、肘あるいは膝の関節部により自由度の高い動きが付与されている(例えば、特許文献1参照)。
【特許文献1】特開平6-327841号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
一般に、このような精巧な人形体は、使用者が自分の気に入ったポーズとなるように肘や膝などの関節部を屈曲させた後に、長期間鑑賞できるようにサイドボードなどの室内用展示棚に人形体を入れて保存されている。そのため、人形体には、使用者が決めたポーズに肘や膝を曲げた状態のままでその姿勢を長時間保持することが要求されていた。また、人形体の肘や膝の動きが人間の動きに類似して動くことも望まれていた。
【0004】
そこで、従来の人形体では、使用者の気に入ったポーズとなるように肘や膝などを屈曲できかつ使用者が気に入ったポーズで肘や膝を屈曲させたまま長期間保持できるように、かつ、屈曲、伸長を繰り返しても球状の連結部が磨耗しないように、球状の連結部を弾性変形しやすい軟質合成樹脂で形成していた。そして、球状の連結部(関節部)に嵌合する腕部や脚部の凹部に、球状の連結部を圧縮しながら嵌合し、軟質合成樹脂の弾力性を利用して使用者の決めたポーズに肘や膝を屈曲させたまま保持していた。
【0005】
このように、従来の球状の連結部には、使用者の気に入ったポーズとなるように肘や膝を自在に屈曲させる機能と、使用者の気に入ったポーズに肘や膝を屈曲させたまま長期間保持する機能の相反する2つの機能が要求されていた。しかしながら、軟質合成樹脂で形成された球状の連結部を使用する場合、人形体を使用者の気に入ったポーズに長時間保持しようとすると、ポーズによっては肘や膝が屈曲状態に耐えられず、肘が望む位置より徐々に下がったり膝が望む位置より徐々に曲がりすぎる問題を生じる場合があった。とくに上腕部、下腕部、大腿部が重い場合にこの傾向が顕著であった。
【0006】
本発明は、上記説明した従来技術の問題点を解決することを出発点としてなされたものである。その目的は、使用者の気に入ったポーズとなるように人形体の関節部を任意の屈曲状態に屈曲させるとともに、そのポーズを長期間保持することができる人形体の関節部材、それを用いる人形体を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明の人形体の関節部材は、以下の構成を有する。すなわち、人形体の関節部材であって、第1部材と、前記第1部材に回転可能に連結される第2部材と、前記第1部材に回転可能に接続されるピストンと、前記第2部材に回転可能に接続され、前記ピストンを前記ピストンの往復移動を可能に収容する、片端部が閉じられているシリンダと、を有することを特徴とする。
【0008】
ここで例えば、前記ピストンの先端部が前記シリンダの内径と略等しい外径を有し、前記ピストンの先端部以外の前記シリンダに収容可能な部分が前記シリンダの内径よりも小さい外径を有することが好ましい。
【0009】
ここで例えば、前記ピストンと前記シリンダとは弾性率が異なる弾性材料で製造されていることが好ましい。
【0010】
ここで例えば、前記弾性材料が合成樹脂であることが好ましい。
【0011】
ここで例えば、前記ピストンはABS樹脂で形成され前記シリンダはポリエチレン樹脂で形成されている、または前記ピストンはポリエチレン樹脂で形成され前記シリンダはABS樹脂で形成されていることが好ましい。
【0012】
また、本発明の人形体は、関節部が上記に記載の関節部材を使用して形成されていることを特徴とする。
【発明の効果】
【0013】
本発明によれば、使用者の気に入ったポーズとなるように人形体の関節部を任意の屈曲状態に屈曲させるとともに、そのポーズを長期間保持することができる関節部材、その関節部材を用いる人形体を提供することができる。
【発明を実施するための最良の形態】
【0014】
以下に、必要に応じて添付図面を参照しながら本発明の一実施形態の人形体の関節部材およびそれを用いる人形体について詳細に説明する。
【0015】
最初に、本明細書で肘や膝などの関節部で使用される関節部材の説明に使用する「伸長状態」と「屈曲状態」について定義する。例えば、膝の「伸長状態」とは、膝を伸ばした状態、すなわち、大腿部と脚部が略一直線上になる状態を指すものとする。また、膝の「屈曲状態」とは、膝を任意の角度に曲げた状態で大腿部と脚部とが略一直線上にない状態を指すものとする。また関節部材には、関節部材を任意の「屈曲状態」に移動したのちその状態で保持するための保持部材が使用されている。この保持部材は、片端部が閉じられている中空の円筒状のシリンダと、シリンダの内側にはまりこむ円筒状のピストンとから構成されている。なお本明細書では、ピストンの先端部をピストンヘッドと呼び、ピストンヘッドの外径より細い部分をピストンロッドと呼ぶことにする。
【0016】
<第1の実施形態>
[関節部材の特徴]
本実施形態の人形体の関節部材は、人形体の膝や肘などの関節部の動作が人間の動きに近くなるよう伸ばしたり曲げたりできるとともに、人形体の関節部を曲げたままの状態で長期間保持することができる点が特徴である。そのため、本実施形態の関節部材は、人形体の関節部を任意の角度に曲げるために第1部材と第1部材に回転可能に連結される第2部材とを使用し、さらに人形体の関節部を任意の角度に曲げたままの状態で保持するために保持部材を使用している。保持部材は、片端部が閉じられている中空円筒状のシリンダとシリンダの内側にはまりこむ円筒状のピストンとで構成されている。保持部材をシリンダとピストンとで構成としたのは、以下の2つの理由による。
【0017】
第1の理由は、シリンダ内でのピストンの位置の違いを利用して関節部材の機械的な「伸長状態」と「屈曲状態」とを再現するためである。関節部材の「伸長状態」とは、ピストンがシリンダの入口付近にあって、ピストンとシリンダの側壁および底壁とで作る閉空間(シリンダ内空間)が大きな容積を有する状態に相当し、関節部材が最も曲がった「屈曲状態」とはピストンがシリンダの底壁付近にあって、シリンダ内空間の容積がほとんど無い状態である。関節部材を「伸長状態」から最も曲がった「屈曲状態」にすると、ピストンは、閉空間(シリンダ内空間)がほとんど無くなるまでシリンダの奥に向かって移動する。
【0018】
第2の理由は「屈曲状態」にあるピストンをそのまま放置しても本実施形態の保持部材では、ピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧、圧縮応力)がピストンに働くため、この移動阻止力によってピストンが「屈曲状態」に長期間安定して保持されるためである。すなわち、ピストンが「屈曲状態」から「伸長状態」に戻ろうとすると、ピストンにはピストンの移動を阻止するように移動阻止力として摩擦力、大気圧が働く。ここで、ピストンに大気圧が移動阻止力として働くのは、ピストンがシリンダ内を移動して「伸長状態」に戻ろうとするとピストンとシリンダ内空間の体積が増加しようとするため、シリンダ内空間の圧力が大気圧(外圧)より低くなるためである。また、ピストンの外径がシリンダの内径がよりも少し大きい場合には、ピストンの移動阻止力として圧縮応力を更に加えることもできる。ここで、圧縮応力について説明すると、本実施形態のピストンとシリンダは異なる弾性率を有する弾性材料、例えば合成樹脂で作られている。具体的にはピストンは弾性変形しにくいABS樹脂で作られ、シリンダはピストンに比べて弾性変形しやすいPE樹脂で作られている(ピストンをPE樹脂でシリンダをABS樹脂で作っても良い)。そのため、ピストンの外径がシリンダの内径より少し大きいとピストンがシリンダ内を移動しようとすると圧縮変形したシリンダからピストンに対してピストンの移動を阻止するように圧縮応力が働く。
【0019】
このように、本実施形態の関節部材では、「屈曲状態」(関節部を曲げたままの状態)にあるピストンをそのまま放置してもピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧、必要に応じて圧縮応力)がピストンに働くため、この移動阻止力によってピストンの移動が阻止される。そのため本実施形態の関節部材は、長期間にわたり「屈曲状態」を安定して保持することができる。
【0020】
次に、本実施形態の保持部材(ピストンとシリンダ)を用いる関節部材およびその関節部材を用いる人形体について詳しく説明する。
【0021】
<人形体の外観構成:図1>
図1は本実施形態の保持部材を用いる関節部材を使用した人形体100の外観構成を示す斜視図である。同図において、101は頭部、102は胸部、103は腰部、104は上腕部、105は下腕部、106は大腿部、107は脚部である。
【0022】
人形体100において、本実施形態の関節部の保持部材を用いる関節部材は様々な関節部で使用されている。例えば、大腿部106と脚部107を接続する膝の関節部分、上腕部104と下腕部105を接続する肘の関節部分で使用されている。その他にも本実施形態の関節部材は、例えば、腰部103と大腿部106を接続する股関節部分あるいは胸部102と上腕部104を接続する肩関節部分などでも使用することができる。
【0023】
以下の説明では、本実施形態の関節部材として膝の関節部分で使用する関節部材を例に説明するが、以下の説明は、例えば、肘の関節部分、肩関節および股関節部分などの他の部分の関節部にも適用することができる。
【0024】
<関節部材:図2〜図4>
図2は本実施形態の人形体100の膝の関節部で使用する関節部材50の一例を示す外観図である。図2では、膝が伸びた「伸長状態」の場合の第1部材30と第2部材40の配置を示している。膝の関節部材50は、第1部材30と第2部材40とから構成され、第1部材30および第2部材40はそれぞれ大腿部と脚部または脚部と大腿部に接続される。なお第1部材30には第1部材30と第2部材40とを回転可能に連結する連結部(図3の回転軸31)が配置され、第1部材30と第2部材40の内部にはピストンとシリンダからなる保持部材10(図3参照)が配置されている。
【0025】
図3は、図2の関節部材50の上部ハウジングを取り外した関節部材50の内部構造を示す図である。図3に示すように、第1部材30と第2部材40とは連結部である回転軸31によって回転可能に連結されている。第1部材30と第2部材40には保持部材10のピストン14とシリンダ12を固定する固定部がそれぞれ配置され、保持部材10は各固定部によって第1部材30と第2部材40に固定されている。本実施形態の関節部材50では第1部材30が第2部材40に対して回転軸31を軸として回転することにより、膝が伸びた「伸長状態」から膝を曲げた「屈曲状態」に変更することができる。また、保持部材10は第1部材30が第2部材40に対して回転軸31を軸として回転するときに、第1部材30の回転運動に連動してピストン14がシリンダ12内を往復移動する。そのため、保持部材10は、第1部材30が第2部材40に対して回転運動する動きに連動するシリンダ内の直線的な往復移動により、膝を伸ばした「伸長状態」から膝を曲げた「屈曲状態」に変更することができる。
【0026】
さらに、本実施形態の保持部材10は、「屈曲状態」にあるピストンをそのまま放置したときにピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧など)がピストンに働く。そのため、この移動阻止力によってピストンを「屈曲状態」に長期間安定して保持することができる。以下、本実施形態の関節部材50で用いられる保持部材10の動作について詳しく説明する。
【0027】
まず、図3を用いて、保持部材10の構成について説明する。保持部材10は、ピストン14とシリンダ12とから構成され、ピストン14は第1部材30に、シリンダ12は第2部材40にそれぞれ回転可能に固定されている。
【0028】
次に、シリンダ12内のピストン14の位置の違いを利用して、保持部材10が膝の「伸長状態」を「屈曲状態」に変更することができる点について詳しく説明する。図3は保持部材10が膝の「伸長状態」を示すときの関節部材50中の第1部材30と第2部材40の配置を示す図である。同図において、第1部材30には、回転軸31、ピストン係合部32(図4参照)、ハウジング固定部33、34などが配置されている。回転軸31は第1部材30と第2部材40を連結し、第1部材30を第2部材40に対して回転して「伸長状態」から「屈曲状態」に変更するための回転軸である。ピストン係合部32は、保持部材10のピストン14を回転可能に固定する中空の円筒形状であり、図3にはその形状は示されていないが、中空円筒形状のハウジング固定部33、34と類似する形状であり高さのみが異なるものである。
【0029】
一方、第2部材40には、シリンダ係合部41(図4参照)、ハウジング固定部42、43などが配置されている。シリンダ係合部41は、保持部材10のシリンダ12を回転可能に固定する中空の円筒形状であり、図3にはその形状は示されていないが、中空円筒形状のハウジング固定部42、43と高さのみが異なるものである。
【0030】
図3に示されるように、保持部材10が膝の「伸長状態」を示すときは、関節部材50中の第1部材30と第2部材40とは略直線上に配置されている。この時の保持部材10のピストン14とシリンダ12の位置の関係は、ピストン14のピストンヘッド(図7参照)がシリンダ12の入口付近に挿入され、ピストン14の軸部分がシリンダ12の外に置かれた状態である。
【0031】
次に、図4を用いて保持部材10が膝の「屈曲状態」を示すときの関節部材50の第1部材30と第2部材40の配置について説明する。図4は、使用者が図3に示すような第1部材30と第2部材40とが略直線上に配置された「伸長状態」にある関節部材50に図4の矢印に示すような方向の外力Fを与え、第1部材30を第2部材40に対して回転軸31を軸として回転させて「屈曲状態」にしたときの第1部材30と第2部材40の配置を示している。すなわち、図3に示す「伸長状態」から図4に示す外力Fが第1部材30に与えられると、第1部材30は回転軸31を軸として第2部材40に対して回転して図4に示す「屈曲状態」の位置(最も曲がった状態)に移動する。なお図4に示す最も曲がった状態の「屈曲状態」の位置は一例であり、使用者が加える外力の大きさを調節することにより任意の「屈曲状態」に移動することができる。
【0032】
図4に示す最も曲がった「屈曲状態」では、保持部材10のピストン14はシリンダ12の内部の最も奥までに挿入された状態となっている。つまり、外力Fが第1部材30に図4の矢印の方向にかかると、外力Fによって第1部材30は回転軸31を軸として第2部材40に対して回転し、それと同時に外力Fが保持部材10のピストン14に伝達され、ピストン14にはシリンダ14の内部方向にピストン14を移動させる外力Fが作用する。その結果、ピストン14は、加えられた外力Fによってシリンダの奥に向かって移動し、ピストン14とシリンダ12の距離が縮まり、図4に示すようにピストン14とシリンダ12の位置が変化する。
【0033】
このように、本実施形態の関節部材50では、第1部材30は第2部材40に対して回転可能に連結され、保持部材10のピストン14とシリンダ12とは、第1部材30と第2部材40にそれぞれ回転可能に固定される。そして、第1部材30に外力Fを与えると、第1部材30は第2部材40に対して任意の角度に回転されると共にピストン14がその回転範囲をシリンダ12の往復移動できる範囲の長さに制限することで、関節部材50の動きを人間の関節の動きに近い動きとなるように制御することができる。
【0034】
なお、本実施形態の関節部材50は、上記説明したように「伸長状態」にある関節部材50に外力を加えて「屈曲状態」に容易に変更することができるとともに、「屈曲状態」のままで長期間放置しても長期間にわたり「屈曲状態」を安定して保持することができる。これは、保持部材10が片端部を閉じた中空円筒状のシリンダ12で形成され、シリンダ12の側壁の内径と略等しい外径を持つ円筒状のピストン14がシリンダ12内を移動するときにシリンダ内に密閉空間が形成され、かつピストン14がシリンダと弾性率の異なる弾性材料で作られているためである。そのため、「屈曲状態」で放置されたピストン14がシリンダ12内を移動して「伸長状態」に戻ろうとすると、ピストン14には移動を阻止する移動阻止力として摩擦力、大気圧、圧縮応力がピストン14に働くため、この移動阻止力によって長期間にわたり「屈曲状態」を安定して保持することができる。なお摩擦力、大気圧による移動阻止力の説明は、図7〜図9を用いて詳細に説明するのでここでの説明は省略する。
【0035】
<関節部材の各部材に使用する素材>
次に、上記説明した関節部材50の製造方法について説明する。なお、下記の説明では、本実施形態の説明に必要な部分についてのみ説明し、本実施形態の説明に不要な部分の説明や公知技術についての説明は省略する。
【0036】
まず、関節部材50の第1部材30、第2部材40および保持部材10の製造に適した素材について説明する。
【0037】
関節部材50を構成する第1部材30や第2部材40は、玩具の製造に使用可能な公知の合成樹脂を用いて製造することができる。合成樹脂の一例を示せば、ポリスチレン樹脂であるが、ポリスチレン樹脂に限ることなく、玩具の製造に使用可能な合成樹脂であればどのような合成樹脂を用いて製造することができる。
【0038】
保持部材10のピストン14やシリンダ12は、弾性変形可能な弾性材料のうち、弾性率の異なる弾性材料をピストン14とシリンダ12に用いて作製する必要がある。弾性材料の一例を示せば、合成樹脂であり、ピストン14に用いる合成樹脂としてシリンダ12に用いる合成樹脂よりも弾性変形しにくい高弾性の合成樹脂を用い、シリンダ12に用いる合成樹脂として弾性変形しやすい低弾性の合成樹脂を用いて作製することが好ましい。ただし、ピストン14とシリンダ12とは弾性率の異なる弾性材料を用いて作製すればよく、ピストン14に用いる合成樹脂をシリンダ12に用いる合成樹脂よりも弾性変形しやすいようにすることも可能である。
【0039】
ピストン14に用いる合成樹脂がシリンダ12に用いる合成樹脂よりも弾性変形しにくい合成樹脂の組み合わせの例として、例えば、ピストン14を弾性変形し難いABS樹脂(アクリロニトリル・ブタジエン・スチレン共重合合成樹脂)で作製し、シリンダ12を弾性変形しやすいPE樹脂(ポリエチレン樹脂)で作製する例があげられる。ただし、この組み合わせは一例であり、上記の条件を満たすものであればどのような合成樹脂の組み合わせを使用しても良い。
【0040】
また、ピストン14に用いる合成樹脂がシリンダ12に用いる合成樹脂よりも弾性変形しやすい合成樹脂の組み合わせの例として、例えば、ピストン14を弾性変形しやすいPE樹脂で作製し、シリンダ12を弾性変形しにくいABS樹脂で作製する例があげられる。
【0041】
上記説明したように、本実施形態の保持部材10では、例えばシリンダ12がピストン14に比べて弾性変形しやすいような弾性率の異なる合成樹脂などの弾性材料を用いて作製する必要がある。その理由の1つは、本実施形態の関節部材50が「伸長状態」から外力Fを与えて「屈曲状態」に移動させようとするとき、ピストンがシリンダの中を移動可能とするためである。この点について以下説明する。
【0042】
本実施形態の保持部材10では、「屈曲状態」で関節部材50を長期間保持する移動阻止力として摩擦力を利用するために、ピストン14をシリンダ12と密着させながらシリンダ12の内部方向へ移動可能とする必要がある。そのためにピストン14の先端部であるピストンヘッドの外径をシリンダ12の内径と略同じにしてある。このため、ピストン14がシリンダ12の側壁に接しながらシリンダ12の内を移動しようとすると、ピストン14の移動方向と逆の方向にピストン14の移動を阻止するような摩擦力を作用させることができる。すなわち、本実施形態のピストン14では、ピストンヘッドの外径とシリンダ12の内径とを略同じ径としてピストンヘッドをシリンダ12に接触させることによりその界面に摩擦力を発生させかつ摩擦力以上の外力がかかったときにのみピストンが移動させることができるようになっている。
【0043】
しかしながら、ピストン14がシリンダ12内を一直線上に移動せず少し直線上からずれて移動する場合には、ピストン14の移動方向でピストン14と接触するシリンダ12の側壁がピストン14の移動を阻止してピストンの移動が阻止されるおそれがある。また、ピストンヘッドの外径とシリンダ12の内径とを略同じ径として成形するが、生産上の誤差が生じることは避けられない。そこで、本実施形態の保持部材10では、たとえば、シリンダ12をピストン14よりも弾性変形しやすい材料を用いて作製している。そのため、ピストン14の移動方向にシリンダ12が接触してシリンダ12の側壁がピストン14の移動を阻止しようとする場合、ピストン14にかかった外力により接触部分のシリンダ12が弾性変形するためピストン14の移動を可能にすることができる。また、生産上の誤差により、ピストンヘッドの外径がシリンダ12の内径よりも大きくなったとしても、シリンダ12が弾性変形できるため、シリンダ12にピストン14をはめることができないということがない。例えば、シリンダ12をPE樹脂で作製し、ピストン14をPE樹脂より弾性変形しにくいABS樹脂で作製することで、ピストン14のシリンダ12内への移動を容易にすることができる。
【0044】
このように、本実施形態の保持部材10では、ピストン14をシリンダ12と異なる弾性率を有する弾性材料、例えばシリンダ12がピストン14に比べて弾性変形しやすい材料で作製している。その結果、本実施形態の保持部材10では、ピストン14をシリンダ12上で移動させるとき、ピストン14がシリンダ12の直線上から少しずれて移動する場合や、ピストン14とシリンダ12の寸法に生産上の誤差が生じている場合でもシリンダ12が弾性変形してピストン14のシリンダ12内での移動を容易にすることができる。そのため、本実施形態の保持部材10は、外力をかけることで「伸長状態」から「屈曲状態」に変更することができる。なお上記説明は、ピストン14の外径がシリンダ12の内径よりも少し大きい場合にも適用される。
【0045】
<関節部材の製造方法:図5>
次に、関節部材50の製造方法について説明する。図2と図3に一例を示す関節部材50は、まず、第1部材30、第2部材40および保持部材10(ピストン14とシリンダ12)に適した素材を選択する。各部材に適した素材は、上記説明した素材の中から関節部材50と人形体100の大きさを加味して選択する。
【0046】
次に、選択した素材を用いて第1部材30、第2部材40およびピストン14とシリンダ12を成形技術で成形するために図2や図3に示す形状に成形するための金型を設計し製造する。そして、選択した各素材と製造した金型を用いて、射出成形技術や鋳込み成形技術などの公知の成形技術を用いてそれぞれの部材を成形する。最後に、成形技術を用いて作製した各部材を組み合わせることにより図2に示す関節部材50が完成する。
【0047】
図5は、上記説明した成形技術を用いて作製された第1部材30、第2部材40、ピストン14およびシリンダ12から関節部材50の組立方法を説明する図である。なお、図5の(a)は、ピストンの挿入位置を表示するためピストンとシリンダの上半分を取り除いた図である。まず、図5の(a)に示すように、ピストン14をシリンダ12の予め決められた位置まで挿入して「伸長状態」の保持部材10を組み立てる。
【0048】
次に、第2部材40を第1部材30の回転軸31に回転可能に連結し、次に、第1部材30と第2部材40とを図5の(b)に示すように略直線上の位置に配置して「伸長状態」にする。次に、図5の(a)に示す「伸長状態」に配置した保持部材10を図5の(b)に示すように第1部材30と第2部材40に取り付ける。すなわち、第1部材30のピストン係合部32にピストン14のピストン突起部17−2を挿入して回転可能に接続し、第2部材40のシリンダ係合部41にシリンダ12のシリンダ突起部18−2を挿入して回転可能に接続する。このようにして、保持部材10を第1部材30と第2部材40とに連結する。最後に第1部材30と第2部材40にそれぞれハウジング部を取り付けることにより図2に示す関節部材50が完成する。なお、図5の(b)は図3を斜めから見た図に相当するので、図5より図3の「伸長状態」における第1部材30、第2部材40、保持部材10の接続関係を別の角度から把握することができる。
【0049】
なお、図5の(b)に示す配置状態(「伸長状態」)の関節部材50を最大角度まで曲げて「屈曲状態」とした状態を図6に示す。図6は図4を斜めから見た図に相当するので、図6より図4の「屈曲状態」における第1部材30、第2部材40、保持部材10の接続関係を別の角度からすることができる。
【0050】
<摩擦力と、大気圧を利用した保持部材の保持方法:図7〜9>
次に、図7〜9を用いて関節部50を「伸長状態」から「屈曲状態」に移動した後で、本実施形態の保持部材10が移動阻止力として摩擦力と大気圧を利用して、「屈曲状態」のままで長期間安定して関節部50を保持することができる理由について説明する。
【0051】
まず、図7を用いて保持部材10の詳細な構成について説明する。図7は、図3で説明した関節部材50が「伸長状態」の場合の保持部材10のピストン14とシリンダ12の配置構成を示す断面図である。
【0052】
図7に示すようにピストン14は、円柱状の先端部であるピストンヘッド13、ピストンヘッドより外径の小さい外径を有するピストンロッド16、ピストン基部15、ピストン14を第1部材30に回転可能に接続するピストン突起部17−1、17−2から構成されている。ピストン14を構成する各部分は、例えば、ABS樹脂を用いて射出成形により一体成形で作製される。
【0053】
一方、シリンダ12は、片端部が底壁11によって閉じられた中空の円筒状の側壁19を有し、シリンダ12を第2部材に回転可能に固定するシリンダ突起部18−1、18−2を備えている。シリンダ12を構成する各部分は、例えば、PE樹脂を用いて射出成形により一体成形で作製される。また、ピストンヘッド13の外径は、シリンダ12の側壁19と略等しい径を有し、シリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部には閉空間、すなわちシリンダ内部が形成される。また、ピストンロッド16の外径は、ピストンヘッド13の外径、すなわち、シリンダ12の側壁19の径よりも小さくなっているため、ピストンロッド16とシリンダ12の側壁19の間には隙間20が形成されている。このことにより、ピストン14とシリンダ12とが接触する面に過剰な摩擦力が生じて、保持部材10の保持力が強くなりすぎて、関節部材50の「伸長状態」から「屈曲状態」に変更できなくなってしまわないように調節されている。すなわち、ピストン14上における、ピストンヘッド13の部分とピストンロッド16の部分の比率を変更することにより、ピストン14とシリンダ12の間に生じる摩擦力を調節している。
【0054】
次に、図7〜図9を用いて、本実施形態の保持部材10を「伸長状態」から「屈曲状態」に移動した後、「屈曲状態」で関節部材50を長期間安定して保持することができる理由について説明する。なお、以下の説明では、ピストンヘッド13の外径がシリンダ12の側壁19の内径と略等しく、ピストンヘッド13がABS樹脂で作製され、シリンダ12がピストンヘッド13より弾性変形しやすいPE樹脂で作製された保持部材10を例に用いて説明する。
【0055】
図7は、保持部材10が「伸長状態」の場合のピストン14とピストンヘッド13の位置関係を示している。一方、図8は、「伸長状態」にある保持部材10に外力Fが加えられてピストンヘッド13が最終的にシリンダ12の底壁11の近くまで移動した状態(関節部材50が最大曲がった「屈曲状態」)の場合のピストン14とピストンヘッド13の位置関係を示している。
【0056】
まず、図7を用いて保持部材10の「伸長状態」について説明すると、「伸長状態」ではピストンヘッド13はシリンダ12の入り口付近に配置される。このときシリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部に形成されるシリンダ内部容積V1に圧力P1(P1は大気圧)の空気があるとする。図の位置は、ピストンヘッド13が再現良く安定してシリンダ12内を往復移動可能な位置であり、図の位置よりピストンヘッド13をシリンダ12の入り口付近に近づいて配置するとピストンヘッド13の往復移動の安定性が低下するので好ましくない。また、図の位置よりピストンヘッド13をシリンダ12の底壁11側に近づけるとピストンヘッド13の移動距離が減り、関節部50の曲がる角度が低下するので好ましくない。
【0057】
また、図8は、「伸長状態」にある保持部材10に外力Fを加えるとピストンヘッド13がシリンダ12の底壁11に向かって移動し、最終的にピストンヘッド13がシリンダ12の底壁11の近くまで移動した時(最大に屈曲させた状態)のピストンヘッド13と底壁11との位置関係を示している。このときのシリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部に形成されるシリンダ内部容積をV2、圧力をP2とする。図の位置は、保持部材10を最大に屈曲させた状態の位置である。この位置を図の位置よりシリンダ12の入り口付近に近づいて配置するとピストンヘッド13の移動距離が減るため好ましくない。
【0058】
一方、図9は、保持部材10を図8で最大に屈曲させた状態にした後で放置した場合に、ピストンの移動を阻止する移動阻止力(摩擦力、大気圧、圧縮応力)がピストンヘッド13に働いて、ピストンヘッド13がこの移動阻止力によって移動できず、図8に示す最大に屈曲させた状態に保持されてピストンヘッド13を最大に屈曲させた状態に長期間安定して保持できる点について説明する説明図である。図9は、図8に示す最大に屈曲させた状態から図9に示す位置に変化しようとするときのピストンヘッド13と底壁11との位置関係を示している。このときのシリンダ12の側壁19と底壁11とピストンヘッド15によってシリンダ12の内部に形成されるシリンダ内部容積をV3、圧力をP3とする。
【0059】
次に、図7〜図8を用いて、外力Fをかけてピストンヘッド13をシリンダ12の入口部から底壁11に近づけるように移動させるときの動作について説明する。
【0060】
図7に示すように、シリンダ内部容積V1、圧力P1(大気圧)の「伸長状態」にある保持部材10に外力Fを加えて、図8に示すように、容積V2、圧力P2の最大の屈曲状態まで保持部材10を移動しようとすると、図7に示すようにシリンダ12と接触するピストンヘッド13の表面に摩擦力R1がピストンヘッド13の移動を阻止する移動阻止力として働く。そのため、摩擦力R1が外力Fより大きいとピストンヘッド13の移動は阻止される。
【0061】
しかしながら、外力Fが摩擦力R1より大きい場合には、ピストンヘッド13は摩擦力R1に打ち勝って底壁11に近づく方向に移動する。すると、シリンダ内部容積はV1からV2に減少し、シリンダ内部の圧力は、V1/V2倍に増加する(例えば、V1/V2=10、P1=1気圧とすると、シリンダ内部の圧力P2は10気圧となる)。このようにシリンダ内部の圧力が増加すると、ピストン14とシリンダ12はそれぞれ圧縮応力を受けて圧縮変形する。このとき、ピストン14に比べて変形しやすい材料で作られているシリンダ12は大きく圧縮変形する。そのため、外力によりピストンヘッド13が底壁11に向かって移動し、シリンダ内部の容積が減少しそれに伴ってシリンダ内部の空気の圧力が増加しシリンダ内部の高圧の空気はピストン14とシリンダ12の隙間20から大気中に放出される。その結果、図8に示すように、容積V2の最大の屈曲状態まで保持部材10を移動した場合でも大部分の空気は大気中に放出されシリンダ内部の容積V2の空気圧力P2は大気圧に近い圧力に保持される。
【0062】
一方、図9は、保持部材10を図8で最大に屈曲させた状態にした後で外力Fを除去しした後でそのまま放置した場合、ピストンヘッド13が図8に示す状態容積V2から図9に示す位置(容積V3)に移動しようとするときにピストンヘッド13の移動を阻止する移動阻止力を説明する図である。
【0063】
図9に示すように、最大の屈曲状態での容積をV2とし、そのときの圧力P2は大気圧に近い圧力とする。このとき、保持部材10を図8の状態から図9の状態(V3、P3)に移動しようとすると、摩擦力R2がピストンヘッド13の移動を阻止する移動阻止力として働く。
【0064】
さらに、シリンダ内部容積はV2からV3に増加するため、シリンダ内部の圧力は、V2/V3倍に減少する(例えば、V2/V3=0.1P2=1気圧とすると、シリンダ内部の圧力はP3=0.1気圧となる)。このようにシリンダ内部の圧力が減少すると、ピストンヘッド13にはシリンダ内部の圧力より大きい大気圧がピストンヘッド13の移動を阻止する移動阻止力として働く。この結果、ピストンヘッド13には摩擦力R1と大気圧とがピストンヘッド13の移動を阻止する移動阻止力として働くためピストンヘッド13の移動が阻止される。
【0065】
なお、図7に示す本実施形態の保持部材10において大気圧がピストンヘッド13の移動を阻止する移動阻止力として働くことを確認するため、図7の保持部材10と、図7の保持部材10の底壁11のみを除去した比較例の保持部材を作製した。そして本実施形態の保持部材10と比較例の保持部材に外力を与えて「伸長状態」から「屈曲状態」にするためピストンをシリンダ内を移動させた後、「屈曲状態」のピストンに対してピストンがシリンダの入口方向に移動するように外力(図7の外力と反対方向)を与えてピストンの移動開始時の外力の大きさを比較した。その結果、本実施形態の保持部材10の移動開始時の外力は比較例の保持部材の移動開始時の外力よりも大きいことがわかった。このことから、本実施形態の保持部材10では上記説明した大気圧がピストンの移動を阻止する移動阻止力として効果的に作用することが確認できた。
【0066】
このように、本実施形態の保持部材10は、「屈曲状態」にあるピストンをそのまま放置しても「屈曲状態」のピストンがシリンダ内を移動して「伸長状態」に戻ろうとすると、ピストンの移動を阻止する移動阻止力として摩擦力、大気圧、圧縮応力がピストンに働くため、この移動阻止力によってピストンの移動が阻止される。そのため本実施形態の関節部材は、長期間にわたり「屈曲状態」(膝や肘等を曲げたままの状態)を安定して保持することができる。
【図面の簡単な説明】
【0067】
【図1】本発明の関節部材を用いた人形体の一例を示す外観構成を示す斜視図である。
【図2】本発明の関節部材の外観を示す正面図である。
【図3】本発明の関節部材の「伸長状態」における内部構造を示す略正面図である。
【図4】本発明の関節部材の最大の「屈曲状態」における内部構造を示す略正面図である。
【図5】本発明の関節部材の組立方法を説明する図である。
【図6】本発明の関節部材の最大の「屈曲状態」における内部構造を示す斜視図である。
【図7】本発明の関節部の保持部材の「伸長状態」における内部構造を示す断面図である。
【図8】本発明の関節部の保持部材の最大の「屈曲状態」における内部構造を示す断面図である。
【図9】本発明の関節部の保持部材が最大の「屈曲状態」から「伸長状態」に戻ろうとするときの内部構造を説明する図である。
【符号の説明】
【0068】
10 保持部材
11 底壁
12 シリンダ
13 ピストンヘッド
14 ピストン
15 ピストン基部
16 ピストンロッド
17−1 ピストン突起部
17−2 ピストン突起部
18−1 シリンダ突起部
18−2 シリンダ突起部
19 側壁
20 隙間
30 第1部材
31 第1部材の回転軸
32 ピストン係合部
33 固定部
40 第2部材
41 シリンダ係合部
42 固定部
100 人形体
【特許請求の範囲】
【請求項1】
人形体の関節部材であって、
第1部材と、
前記第1部材に回転可能に連結される第2部材と、
前記第1部材に回転可能に接続されるピストンと、
前記第2部材に回転可能に接続され、前記ピストンを前記ピストンの往復移動を可能に収容する、片端部が閉じられているシリンダと、
を有することを特徴とする人形体の関節部材。
【請求項2】
前記ピストンの先端部が前記シリンダの内径と略等しい外径を有し、
前記ピストンの先端部以外の前記シリンダに収容可能な部分が前記シリンダの内径よりも小さい外径を有する、
ことを特徴とする請求項1に記載の人形体の関節部材。
【請求項3】
前記ピストンと前記シリンダとは弾性率が異なる弾性材料で製造されていることを特徴とする請求項1または請求項2に記載の人形体の関節部材。
【請求項4】
前記弾性材料が合成樹脂であることを特徴とする請求項3に記載の人形体の関節部材。
【請求項5】
前記ピストンはABS樹脂で形成され前記シリンダはポリエチレン樹脂で形成されている、または前記ピストンはポリエチレン樹脂で形成され前記シリンダはABS樹脂で形成されていることを特徴とする請求項4に記載の人形体の関節部材。
【請求項6】
関節部が請求項1乃至請求項5のいずれか1項に記載の関節部材を使用して形成されていることを特徴とする人形体。
【請求項1】
人形体の関節部材であって、
第1部材と、
前記第1部材に回転可能に連結される第2部材と、
前記第1部材に回転可能に接続されるピストンと、
前記第2部材に回転可能に接続され、前記ピストンを前記ピストンの往復移動を可能に収容する、片端部が閉じられているシリンダと、
を有することを特徴とする人形体の関節部材。
【請求項2】
前記ピストンの先端部が前記シリンダの内径と略等しい外径を有し、
前記ピストンの先端部以外の前記シリンダに収容可能な部分が前記シリンダの内径よりも小さい外径を有する、
ことを特徴とする請求項1に記載の人形体の関節部材。
【請求項3】
前記ピストンと前記シリンダとは弾性率が異なる弾性材料で製造されていることを特徴とする請求項1または請求項2に記載の人形体の関節部材。
【請求項4】
前記弾性材料が合成樹脂であることを特徴とする請求項3に記載の人形体の関節部材。
【請求項5】
前記ピストンはABS樹脂で形成され前記シリンダはポリエチレン樹脂で形成されている、または前記ピストンはポリエチレン樹脂で形成され前記シリンダはABS樹脂で形成されていることを特徴とする請求項4に記載の人形体の関節部材。
【請求項6】
関節部が請求項1乃至請求項5のいずれか1項に記載の関節部材を使用して形成されていることを特徴とする人形体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−101001(P2009−101001A)
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2007−276687(P2007−276687)
【出願日】平成19年10月24日(2007.10.24)
【出願人】(000135748)株式会社バンダイ (246)
【Fターム(参考)】
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成19年10月24日(2007.10.24)
【出願人】(000135748)株式会社バンダイ (246)
【Fターム(参考)】
[ Back to top ]