
人数検知装置及びエレベータ
【課題】従来例による人数検知では、積載重量の変化の回数と方向とから人数を検知しているため、重量の変化が直線的な階段状でなければ検知出来ない。又、在場人数の精度に関して言及されていない。
【解決手段】計測手段11は、人数検知に用いるデータを計測する。乗降人数推定手段12は、計測されたデータから乗降人数を推定する。乗客有無推定手段13は、計測されたデータから閉空間内の乗客の有無を推定する。在場人数推定手段14は、乗客有無推定結果が無である場合には、閉空間内の在場人数を0人にリセットし、乗客有無推定結果が有である場合には、{(前記戸開前在場人数)+(前記乗車人数の推定結果)−(前記降車人数の推定結果)}で与えられる式から閉空間内の在場人数を推定する。
【解決手段】計測手段11は、人数検知に用いるデータを計測する。乗降人数推定手段12は、計測されたデータから乗降人数を推定する。乗客有無推定手段13は、計測されたデータから閉空間内の乗客の有無を推定する。在場人数推定手段14は、乗客有無推定結果が無である場合には、閉空間内の在場人数を0人にリセットし、乗客有無推定結果が有である場合には、{(前記戸開前在場人数)+(前記乗車人数の推定結果)−(前記降車人数の推定結果)}で与えられる式から閉空間内の在場人数を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エレベータ等の閉空間内の乗車人数、降車人数及び在場人数を検知するための人数検知装置に関する。
【背景技術】
【0002】
エレベータによる防犯機能の向上を図る上で、エレベータへの乗車人数、エレベータからの降車人数、及びエレベータ内の在場人数を精度良く検知することは重要である。
【0003】
従来の人数検知装置として、例えば、特許文献1に記載の特許発明は、箱の積載重量を停止中に継続的に計測し、計測データを濾波し、箱の積載重量データに基づきエレベータの箱内の乗客の移送人数を判定するものであり、停止中に生じる階段状の積載重量の変化を記録し、エレベータの箱に出入りした人数を階段状変化に基づき判定している。
【0004】
又、特許文献2に記載の発明は、積載重量を平均体重値で割った値を在場人数としている。
【0005】
又、特許文献3に記載の発明は、単数の発受光素子から得られるドア通過検出信号から在場人数をカウントすることとしている。
【0006】
又、特許文献4に記載の発明は、複数の光電センサから感知信号によって乗車人数、降車人数を検出することとしている。
【0007】
【特許文献1】特許第2597448号公報
【特許文献2】特開昭55−56963号公報(第2頁右上欄の第6行〜第9行)
【特許文献3】特開2006−168930号公報
【特許文献4】特開平11−35242号公報
【特許文献5】特開2006−70653号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
先ず、乗車人数及び降車人数の検知に関する問題点を、以下に指摘する。
【0009】
特許文献1に記載の従来の人数検知装置は以上の様に構成されているので、積載重量の階段状変化を記録し、積載重量の変化の回数と方向とから乗車人数及び降車人数を検知する場合には、積載重量の値は時間軸に対して平行又は垂直方向に直線的で階段状の変化でなければならない。しかしながら、実際に乗客が乗降したときの積載重量の値は、時間軸に対して曲線的な変化を示すため、積載重量の波形を、階段状に濾波する手段を併用しなければ、現実的な乗車人数及び降車人数を推定することが出来ないという問題点があった。
【0010】
又、特許文献2に記載の様に、積載重量を平均体重値で割った値を在場人数とし、在場人数を乗車人数に等しいと考える場合には、“エレベータに人が乗車するときには元々のエレベータ内には人がいない”という条件下のみでしか、在場人数=乗車人数という考え方は成立しないという問題点があった。
【0011】
又、特許文献3の第8頁の第21行〜第30行に記載の様に、エレベータ内の様な閉空間を撮影している画像の処理によって在場人数を検知し、在場人数を乗車人数と等しいと考える場合にも、同様に、“エレベータに人が乗車するときには元々のエレベータ内には人がいない”という条件下のみでしか、在場人数=乗車人数という考え方は成立しないという問題点があった。
【0012】
更に、特許文献2及び特許文献3の第8頁第21行〜第30行に記載の様に、積載重量を平均体重で割る方法、或いは、画像処理で在場人数を検知する方法の場合に、例えば乗客2人が降車後、乗客2人が乗車すると、在場人数に変化がない。その結果、乗車人数と降車人数とを検知出来ないという問題点があった。
【0013】
更に、特許文献3の第8頁第21行〜第30行に記載の様に、エレベータ内の様な閉空間の出入り口を撮影している画像の処理によって、乗車人数及び降車人数を検知する場合には、演算量が比較的多くなり、演算リソースが増加するので、人数検知装置の導入コストが増加するという問題点があった。しかも、乗車と降車とを区別するために、複数のカメラを設置するときには、人数検知装置の導入コストが更に増加するという問題点があった。
【0014】
更に、特許文献3の第8頁第11行〜第15行に記載の様に、ドア付近に設置される単体の光電センサによって人数を検知する場合には、乗車と降車とを区別することが難しいという問題点があった。
【0015】
又、特許文献4の様に、乗車と降車とを区別するために、ドア付近に複数の光電センサを設置するときには、複数の信号の処理が複雑となるという問題点があり、しかも、人数検知装置の導入コストが増加するという問題点があった。
【0016】
次に、在場人数の検知に関する先行技術の問題点を以下に指摘する。
【0017】
特許文献2に記載の従来の人数検知装置は以上の様に構成されているので、積載重量を平均体重値で割った値を在場人数とする場合には、実際の乗客の重量と平均体重との差により在場人数の検知精度が劣化するという問題点があった。
【0018】
又、特許文献3の第8頁第21行〜第30行に記載する様に、エレベータ内の様な閉空間を撮影している画像の処理によって在場人数を検知する場合には、演算量が比較的多くなり、演算リソースが増加するので、人数検知装置の導入コストが増加するという問題点があった。しかも、障害物又は撮影範囲の制限等により撮影範囲内に対象となる人が写らない場合には、在場人数の検知精度が劣化するという問題点もあった。
【0019】
又、上記の受発光素子、画像、或いは積載重量によって推定される乗車人数と降車人数との加減算から、在場人数を求める場合には、その階の乗車人数及び降車人数を100%正確に検知し得たとしても、正しい在場人数を検知できないことが有り得るという問題点があった。例えば、エレベータが1階で戸閉し、出発するときの在場人数(戸閉後在場人数)は、1階での乗車人数と降車人数とに加え、1階に到着したときに既に乗っていた在場人数(戸開前在場人数)を考慮しなければならない。戸開前在場人数が間違っていると、1階での乗車人数と降車人数とを100%正確に検知し得ても、戸閉後在場人数は正しくならない。そして、戸開前在場人数は、1階に停止する前に停止した各階での乗車人数及び降車人数に依存するため、1階に停止する前に停止した各階での乗車人数と降車人数とを1度でも誤検知すると、1階の戸閉後在場人数は正しく検知されず、その後も誤りが訂正されないという問題点があった(特許文献1〜5を参照。)。
【0020】
尚、以上に記載した問題点は、エレベータにのみ限られるものではなく、一般的に、扉が開閉して人が出入り可能な閉空間内の人数検知装置についても言えることである。
【0021】
この発明は上記の課題を解決するためになされたものであり、エレベータ等の閉空間内の乗車人数、降車人数及び在場人数を精度良く推定することが可能な人数検知装置を得ることを、その主目的とする。
【課題を解決するための手段】
【0022】
この発明の主題は、人数検知装置であって、閉空間内の乗車人数及び降車人数を推定するためのデータを計測する計測手段と、前記計測手段により計測されたデータに基づいて乗車人数及び降車人数を推定する乗降人数推定手段と、前記計測手段により計測されたデータに基づいて前記閉空間内の乗客有無を推定する乗客有無推定手段と、前記乗降人数推定手段により推定された乗車人数及び降車人数の推定結果と、前記乗客有無推定手段の乗客有無推定結果とを受信して、(ア)前記乗客有無推定結果が無である場合には、前記閉空間内の在場人数を0人にリセットし、(イ)前記乗客有無推定結果が有である場合には、戸開前在場人数を前回の前記閉空間内の在場人数の推定結果とすると、{(前記戸開前在場人数)+(前記乗車人数の推定結果)−(前記降車人数の推定結果)}で与えられる式から前記閉空間内の在場人数を推定する在場人数推定手段とを備えることを特徴とする。
【0023】
以下、この発明の主題の様々な具体化を、添付図面を基に、その効果・利点と共に、詳述する。
【発明の効果】
【0024】
本発明の主題によれば、エレベータ等の閉空間内の乗車人数、降車人数、及び在場人数を精度良く推定することが出来る。
【発明を実施するための最良の形態】
【0025】
(実施の形態1)
本実施の形態では、「扉が開閉し、人が乗降する閉空間」は、説明の便宜上、その典型例として、エレベータであるとする。
【0026】
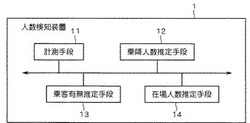
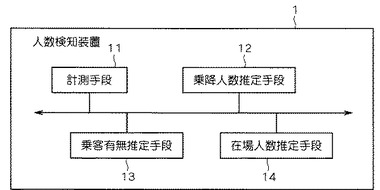
図1は、本実施の形態に係るエレベータ用人数検知装置1の構成を示すブロック図である。図1の人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13及び在場人数推定手段14を備えている。これらの手段の内で、ハードウェアである計測手段11を除いて、各手段12〜14は、マイクロコンピュータ上のソフトウェアによって構成されている。
【0027】
計測手段11は、例えば、エレベータに設置されている重量センサ、光電センサ或いはカメラの何れか又はそれらの組合せより成り、重量センサ、光電センサ或いはカメラの各々は、積載重量、感知結果又は監視画像を計測する。
【0028】
乗降人数推定手段12は、計測手段11の計測結果を基に、エレベータに乗車する乗車人数、及び、エレベータから降車する降車人数を推定する。
【0029】
乗客有無推定手段13は、計測手段11の計測結果を基に、エレベータ内の乗客の有無を推定する。
【0030】
在場人数推定手段14は、乗降人数推定手段12の乗降人数推定結果と、乗客有無推定手段13の乗客有無推定結果とを基に、エレベータ内の在場人数を推定する。
【0031】
次に、図1の人数検知装置1の動作について図面を踏まえて記載する。
【0032】
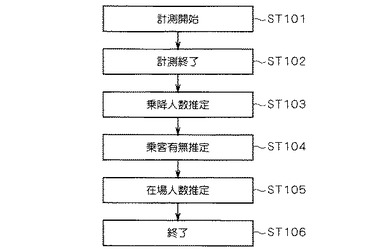
図2は、本実施の形態に係る図1の人数検知装置1の動作を示すフローチャートである。
【0033】
ステップST101に於いて、計測手段11は、一般的な閉空間用の場合には、予め決められた所定の計測開始条件が満たされると、計測を開始する。この計測手段11の計測開始条件としては、例えば予め決められた所定の時刻がある。本実施の形態の例では閉空間はエレベータであるので、エレベータが或る階に停止してその扉が開いた時点が、計測手段11の計測開始条件となり、計測手段11がエレベータのドアが開く状態に応じて計測を開始する。
【0034】
ステップST102に於いて、計測手段11は、予め決められた所定の計測終了条件が満たされると、その計測を終了する。この計測手段11の計測終了条件としては、計測手段11が一般的な閉空間用の場合には、例えば予め決められた所定の時刻がある。又は、計測終了条件として、計測開始時刻からの予め決められた所定の経過時間としても良い。本実施の形態の例では閉空間はエレベータであるので、エレベータのドアが閉まる時点が計測終了条件となり、エレベータのドアが閉まるタイミングに応じて、計測手段11はその計測を終了する。
【0035】
ステップST103に於いて、乗降人数推定手段12は、計測手段11の計測結果を計測手段11から受信し、エレベータ(閉空間の一例)内への乗車人数、エレベータ(閉空間)内からの降車人数を推定する。例えば、計測手段11が重量センサであるときには、計測手段11から得られる計測結果は積載重量となり、乗降人数推定手段12は、既述した特許文献1の方法で以って、乗車人数及び降車人数を推定しても良い。又は、計測手段11が複数の光電センサから成るときには、当該計測手段11から得られる計測結果は光電センサの感知結果であるので、乗降人数推定手段12は、既述した特許文献4の方法を用いて、乗車人数及び降車人数を推定することとしても良い。或いは、計測手段11がエレベータ内への乗客の乗車を撮影し得る撮像カメラ及びエレベータ内からの乗客の降車を撮影し得る撮像カメラから成るときには、各撮像カメラが撮影した画像データから、乗降人数推定手段12は、エレベータ内への乗車人数及びエレベータ内からの降車人数を推定する。
【0036】
ステップST104に於いて、乗客有無推定手段13は、計測手段11の計測結果を計測手段11から受信し、エレベータ内の乗客の有無を推定する。
【0037】
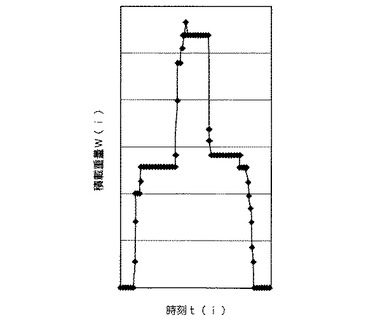
ステップST104に於ける、乗客有無推定手段13が乗客有無を推定する方法の一例(この方法を乗客有無推定方法(一)と定義する。)について、以下に詳述する。例えば、図3は、計測手段11が重量センサであるときに、計測手段11によって計測されたエレベータの積載重量の時系列変化を示す図であり、横軸は時刻t(i)を示し、縦軸は時刻t(i)に計測された積載重量W(i)(デジタル値)を示している。ここで、iは計測手段11のサンプリング番号であり、t(i)−t(i−1)は、計測手段11のサンプリング周期となる。積載重量W(i)の内で、サンプリング番号iが最も大きな値のときの積載重量W(i)を、即ち、最後に計測された積載重量W(i)をW(i_max)と定義すると、ステップST104に於いて、乗客有無推定手段13は、計測手段11から積載重量W(i_max)を受信する。そして、乗客有無推定手段13は、積載重量W(i_max)が、同手段13内に予め保持している所定の閾値W_judge以下であった場合には、エレベータ内に乗客はいない(無)と推定する。他方、積載重量W(i_max)が閾値W_judgeよりも大きな値であった場合には、乗客有無推定手段13は、エレベータ内には乗客がいる(有)と推定する。
【0038】
ステップST105に於いて、在場人数推定手段14は、乗降人数推定手段12から乗車人数及び降車人数の推定値のデータを、乗客有無推定手段13から乗客有無推定結果のデータを受信する。そして、乗客有無の推定結果が“無”である場合には、在場人数推定手段14は、エレベータの戸閉後の在場人数を0人とする。即ち、在場人数推定手段14は、エレベータの戸閉後の在場人数を0人にリセットする。このリセットにより、仮に過去の乗車人数及び降車人数の誤検知によってエレベータの戸閉後の在場人数の検知精度が劣化していても、当該リセット処理によって、過去のデータは無くなることとなるので、戸閉後の在場人数の検知精度の劣化は是正されることとなる。そして、在場人数推定手段14は、リセット後の戸閉後の在場人数(0人)を、次回の戸開前在場人数として保有する。
【0039】
これに対して、乗客有無の推定結果が“有”である場合には、在場人数推定手段14は、エレベータの戸閉後の在場人数を、下記の式(1)に基づいて求める。
【0040】
【数1】

【0041】
この場合、求められた戸閉後在場人数は、次回の戸開前在場人数として利用される。
【0042】
尚、図2に於いては、ステップST104及びST105に於いて乗客有無推定及び在場人数推定を行っているが、乗客有無推定及び在場人数推定の動作順序は特に限定されるものではない。即ち、計測開始後から計測終了までの期間(エレベータのドアが開いて閉まるまでの期間)中に、計測手段11によりサンプリング周期毎に計測される最新データを基にして、人数検知装置1は、常に、乗客有無推定及びそれに引き続く在場人数推定をダイナミックに行い続けても良い(この方法を乗客有無推定方法(二)と定義する。)。この場合、在場人数推定手段14は、乗客有無推定手段13が計測期間中に最後に“無”と推定した後以降に於いて、乗降人数推定手段12により推定された乗車人数及び降車人数を利用して、式(1)に基づきエレベータの戸閉後の在場人数を推定すれば良い。
【0043】
又、乗客有無推定手段13に於いて、閾値W_judgeと比較される積載重量は、特定期間の平均値であっても良い。これにより、エレベータ内の乗客の振動により、微増減する積載重量によって乗客有無推定結果を誤る可能性が低くなる。
【0044】
又、計測手段11から得られる計測結果が光電センサの感知結果であるときには、乗客有無推定手段13は、特許文献5に記載された様な方法で在場人数を推定し、その在場人数結果から乗客有無を推定することとしても良い。
【0045】
尚、本実施の形態で記載した人数検知装置1は、その用途例として、例えば、“共連れ”という現象を検知・防止するシステムに利用可能である。ここで、“共連れ”とは、例えば、入退室管理システムに於いて、認証者によってドアが開き、認証者が入場中に非認証者も入場できてしまうという物理セキュリティホールである。この“共連れ”を検知するためには、“認証者の数”と“実際に入場した人数”とを比較する必要があり、“実際に入場した人数”、即ち、本実施の形態1に於ける「乗車人数」を検知するための装置として、本実施の形態の人数検知装置1(特に、乗降人数推定手段12及び在場人数推定手段14)を利用することが出来る。
【0046】
以上の様に、本実施の形態によれば、“エレベータに人が乗車するときには元々のエレベータ内には人がいない”と言う条件下でなくとも、乗車人数を推定出来ると言う効果が得られる。
【0047】
又、求めた乗車人数と降車人数との加減算によって在場人数を求める場合には、過去の乗車人数及び降車人数の誤検知によって在場人数の検知精度が劣化するという課題があった。しかしながら、本実施の形態によれば、乗車人数及び降車人数を推定する乗降人数推定手段12とは別個に乗客有無推定手段13を設けて、乗客有無推定手段13の推定結果が“無”の場合には在場人数推定手段14は閉空間内の戸閉後在場人数を0値にリセットしてしまうので、過去の、乗車人数及び降車人数の誤推定に影響に受けずに、在場人数を推定することも可能となる。このため、在場人数の検知精度が改善され、在場人数を精度良く推定することが出来ると言う効果がある。
【0048】
又、特許文献2の様に、積載重量を平均体重値で割った値を在場人数とする場合には、実際の乗客の重量と平均体重との差により在場人数の検知精度が劣化すると言う課題があった。しかしながら、本実施の形態によれば、数1の式(1)に示される様に、乗車人数と降車人数とから在場人数を算出しているので、実際の乗客の重量と平均体重との差では、在場人数の検知精度は劣化しないと言う効果がある。
【0049】
尚、本実施の形態では、計測手段11として、主として既設のエレベータの重量センサや光電センサや監視カメラを用いているが、既設のエレベータの重量センサや光電センサや監視カメラでなくとも良い。即ち、出入口の確保された閉空間に於いて、その閉空間の積載重量を計測できる人数検知装置1専用の重量センサや、閉空間の出入り口を通過する人を感知する光電センサや、その閉空間や閉空間の出入り口を撮影する人数検知装置1専用のカメラを、計測手段11として用いても、本実施の形態の方法により、閉空間への入場人数(エレベータへの乗車人数)、退場人数(エレベータからの降車人数)及び在場人数を推定することが出来る。とは言え、既設のエレベータの重量センサや、光電センサや、監視カメラを計測手段11として活用することは、人数検知装置1の導入コストを低減することが出来るという利点を奏する。
【0050】
(実施の形態2)
実施の形態1では、計測手段11を特定することなく、乗車人数と降車人数と乗客有無結果とから、エレベータの戸閉後在場人数を推定している。
【0051】
しかし、例えば、乗車人数、降車人数、及び乗客有無を推定するための各計測手段を、それぞれ、重量センサ、光電センサ、及び監視カメラに担わせると言う様に別々に設定してしまうと、人数検知装置1の導入コストが増加してしまう。
【0052】
そこで、本実施の形態では、重量センサのみで以って、乗車人数、降車人数、及び在場人数を精度良く推定する方法について示す。
【0053】
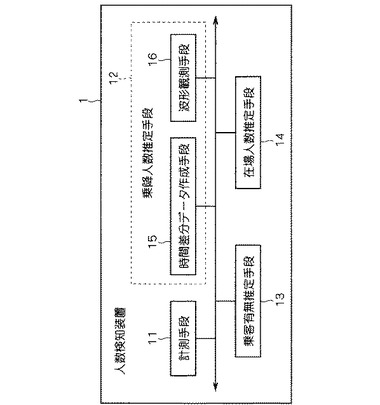
図4は、この発明の実施の形態2に係る人数検知装置1の構成を示すブロック図である。図4に示す様に、人数検知装置1は、計測手段11、時間差分データ作成手段15、波形観測手段16、乗客有無推定手段13及び在場人数推定手段14を備える。そして、本実施の形態では、時間差分データ作成手段15及び波形観測手段16により、実施の形態1の乗降人数推定手段12に対応する「乗降人数推定手段」が構成されている点に、その特徴点がある。そして、計測手段11は、エレベータに配設されている重量センサである。その他の各手段13〜16は、マイクロコンピュータ上のソフトウェアによって構成されている。
【0054】
計測手段11は、既述の通りエレベータの重量センサより成り、エレベータのドアが開いた後、当該ドアが閉められるまでの期間内に、予め決められた所定のサンプリング周期でエレベータの積載重量を計測する。
【0055】
時間差分データ作成手段15は、計測手段11により計測された積載重量の差分間隔毎の変化を演算して、時間差分データを作成する。
【0056】
波形観測手段16は、時間差分データ作成手段15により作成された時間差分データの時系列変化と、その保有する標準モデルの時間差分データの時系列変化又は所定の閾値とを比較して、エレベータに乗車する乗車人数、及び、エレベータから降車する降車人数を推定する。
【0057】
乗客有無推定手段13は、計測手段11により計測された積載重量を、その保有する所定の閾値と比較して、エレベータ内の乗客有無を推定する。
【0058】
在場人数推定手段14は、波形観測手段16による乗車/降車人数の推定結果と、乗客有無推定手段13による乗客有無推定結果とを基に、実施の形態1で記載した方法と同一の方法によって、在場人数を推定する。
【0059】
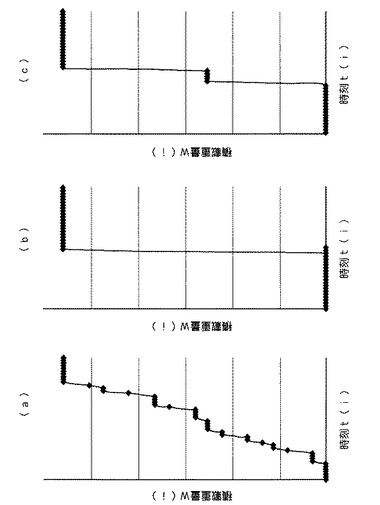
ここで、図5は、エレベータの積載重量の時系列変化を示す図であり、その横軸は時刻t(i)を示し、その縦軸は時刻t(i)に計測された積載重量W(i)を示している。図5(a)はエレベータに2人が連続乗車したときの積載重量の時系列変化を示しており、エレベータがある階に停止してドアが開いた後に2人が順次に連続乗車した場合には、1人目が乗車したことによる重量変化と、2人目が乗車したことによる重量変化との間隔が短い。そのため、図5(a)が示す積載重量W(i)の波形は、2人が連続乗車したときの波形ではあるが、はっきりとした区切れが表れてはいない波形となっている。
【0060】
このとき、既述した特許文献1に記載の先行技術では、積載重量の変化の方向と回数とからエレベータの乗車人数及び降車人数を算出しているので、図5(a)に示す積載重量W(i)の波形を図5(b)又は図5(c)に示す様に、直線的で階段状に変化を示す波形へと濾波しなければならない。しかし、図5(b)と図5(c)とでは推定される人数に違いが生じるため、特許文献1の先行技術では正確に波形を濾波しなければならない。図5(a)の場合は、2人が連続乗車したときの積載重量の時系列変化であるため、図5(c)へ濾波することが正解となるが、1人が乗車した場合であっても、積載重量の波形が図5(a)に示す様な区切れの無い積載重量の波形となる可能性があるため、場合によっては、図5(b)へと濾波することが正解となることもある。この様に、特許文献1に記載の方法では、乗車人数及び降車人数を推定するために正確に積載重量を濾波することは困難となる。従って、本実施の形態では、特許文献1に記載の方法を用いて乗車人数及び降車人数を推定することはしないこととする。
【0061】
そこで、本実施の形態では、図4に示す構成により、所定のサンプリング周期で計測された積載重量の差分間隔毎の変化を演算して時間差分データを作成し、作成された時間差分データの時系列変化と標準モデルの時系列変化又は所定の閾値とを比較して、乗車人数及び降車人数を推定している。
【0062】
次に、図4の人数検知装置1の動作について記載する。
【0063】
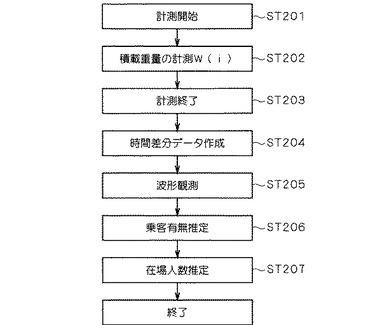
ここで、図6は、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0064】
ステップST201に於いて、計測手段11は、予め決められた所定の計測開始条件が満たされると、計測を開始する。この計測手段11の計測開始条件としては、例えば予め決められた所定の時刻がある。本例では、閉空間はエレベータであるので、エレベータがある階に停止して、そのドアが開いた時点に応じて、計測手段11たる重量センサは、積載重量の計測を開始する。
【0065】
ステップST202に於いて、計測手段11は、所定のサンプリング周期で、エレベータの積載重量W(i)を計測する。
【0066】
ステップST203に於いて、計測手段11は、予め決められた所定の計測終了条件が満たされると、その計測を終了する。この計測手段11の計測終了条件としては、例えば予め決められた所定の時刻がある。又、計測終了条件として、計測開始時刻からの予め決められた所定の経過時間としても良い。本例では、閉空間はエレベータであるので、そのドアが閉じた時点に応じて、計測手段11たる重量センサは、積載重量の計測を終了する。
【0067】
ステップST204に於いて、時間差分データ作成手段15は、計測手段11から計測終了信号を受けて、計測開始から計測終了までの間に計測手段11により計測された積載重量W(i)のデータを計測手段11から受信する。
【0068】
ここで、既述した図3は、時間差分データ作成手段15が計測手段11より受信する積載重量W(i)の時系列変化の一例を示す図であり、ここでは、エレベータに2人が乗車した後に、2人が降車したときのグラフの一例を示している。
【0069】
そして、図6のステップST204に於いて、時間差分データ作成手段15は、受信した積載重量W(i)のデータから、次の式(2)を利用して、積載重量W(i)の差分間隔毎の変化を演算して時間差分データW_diff(i)を作成する。
【0070】
【数2】
【0071】
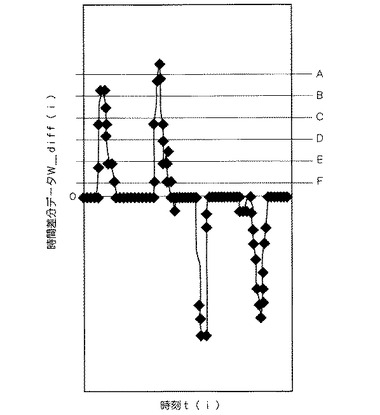
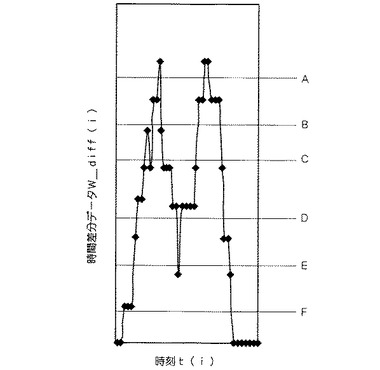
図7は、時間差分データ作成手段15により作成された時間差分データW_diff(i)の時系列変化の一例を示す図である。図7に於いて、横軸は時刻t(i)を示し、縦軸は時間差分データW_diff(i)を示している。図7に於いて、上方向に凸の波形は、積載重量が増加したことを意味し、エレベータ内に人が乗車したことを意味する。逆に、下方向に凸の波形は、積載重量が減少したことを意味し、エレベータ内から人が降車したことを意味する。図7に示す閾値A〜Fについては、後述する。
【0072】
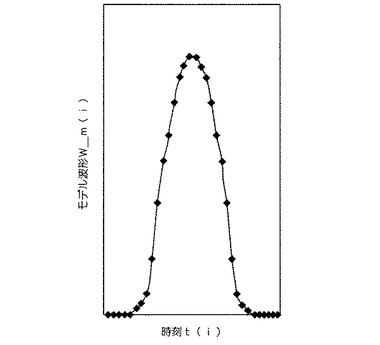
図8は、1人が乗車したときのエレベータの積載重量から作成された標準モデルの時間差分データW_m(i)の時系列変化を示す図である。尚、同データW_m(i)は、波形観測手段16によって保有されている。
【0073】
次に、図6のステップST205に於いて、波形観測手段16は、時間差分データ作成手段15により作成された時間差分データW_diff(i)を受信する。波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が上方向に凸の波形となっている場合には、例えば図8に示す様な、予め波形観測手段16内に保持している第1標準モデルの時間差分データW_m(i)の時系列変化と、受信した時間差分データW_diff(i)の時系列変化との類似度を表す次の式(3)に示す正規化相互相関関数z(τ)(第1正規化相互相関関数)を、演算する。
【0074】
【数3】
【0075】
ここで、τは基準となる時刻t(i)からのずれ量を示し、バーW_mは標準モデルの時間差分データW_m(i)の平均を示し、バーW_diffは受信した時間差分データW_diff(i)の平均を示す。基準となる時刻t(i)としては、例えば、当該階での戸開開始時刻若しくは戸閉完了時刻等がある。
【0076】
そして、ステップST205に於いて、波形観測手段16は、演算した正規化相互相関関数z(τ)の値が、波形観測手段16が予め保持している所定の閾値S_overlap以上となった回数を、「乗車人数」とする。
【0077】
他方で、波形観測手段16は、図8に示す(その値が0以上の)第1標準モデルの時間差分データW_m(i)の各値の符号を反転して成る、第2標準モデルの時間差分データW_m(i)をも、保持している。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が下方向に凸の波形となっている場合には、第2標準モデルの時間差分データW_m(i)の時系列変化と、受信した時間差分データW_diff(i)の時系列変化との類似度を表す上記の式(3)に示す正規化相互相関関数z(τ)(第2正規化相互相関関数)を演算する。そして、波形観測手段16は、演算した相互相関関数z(τ)の値が予め保持している所定の閾値S_overlap以上となった回数を、「降車人数」とする。
【0078】
尚、波形観測手段16は、第1標準モデルの時間差分データW_m(i)の値と、それを負の値に変更した第2標準モデルの時間差分データW_m(i)の値の何れか一方だけを保持しても良い。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が上方向及び下方向の内の何れの方向に凸の波形となっているかを判断し、保持している標準モデルの時間差分データW_m(i)の値の符号を変換した後で、上記の式(3)に示す正規化相互相間関数z(τ)を演算しても良い。こうすることで、標準モデルの時間差分データを保持する記憶領域を少なくすることが出来、演算リソースを効率的に利用する事が可能となる。
【0079】
波形観測手段16が上記の様に標準モデルの時間差分データW_m(i)を使用して乗車人数及び降車人数を推定する方法を、人数推定方法(一)と定義する。
【0080】
ステップST206では、乗客有無推定手段13は、実施の形態1で記載した乗客有無推定方法と同一の方法(乗客有無推定方法(一)又は乗客有無推定方法(二))により、乗客有無を推定する。
【0081】
更に、ステップST207では、在場人数推定手段14は、波形観測手段16から乗車人数及び降車人数を受信する。更に、在場人数推定手段14は、乗客有無推定手段13からも、乗客有無の推定結果を受信する。そして、在場人数推定手段14は、実施の形態1のステップST105の動作と同様の動作によって、在場人数を推定する。
【0082】
以上より、計測手段11を重量センサのみで構成することが出来、積載重量の変化が直線的な階段状の変化でなくとも、乗降人数を検知することが出来る。
【0083】
<変形例1:人数推定方法(二)>
図6のステップST205に於いて、波形観測手段16は、上記の人数推定方法(一)とは異なる次の人数推定方法(二)で以って、乗車人数と降車人数とを推定しても良い。
【0084】
即ち、波形観測手段16は、時間差分データW_diff(i)に対して、正の値である第1閾値を設定している。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の0以上の値に対して、所定の位置に第1閾値を設定し、時間差分データW_diff(i)の時系列変化が設定した第1閾値以上になった回数(換言すれば、時間差分データW_diff(i)が上記閾値を上方向に又は下方向の何れか一方に跨いだ回数。)を、「乗車人数」とする。
【0085】
例えば、図7のCの位置に第1閾値を設定した場合には、時間差分データW_diff(i)の時系列変化が閾値C以上になった回数は2回であり、波形観測手段16は乗車人数を2人と推定する。
【0086】
他方、波形観測手段16は、時間差分データW_diff(i)に対して、負の値である第2閾値を設定している。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が設定した第2閾値以下になった回数(換言すれば、時間差分データW_diff(i)が上記閾値を上方向又は下方向の何れか一方に跨いだ回数。)を、「降車人数」とする。
【0087】
尚、第1閾値と第2閾値との絶対値が同じ場合には、波形観測手段16が保持する閾値は、第1閾値及び第2閾値のどちらか一方でも良い。時間差分データW_diff(i)の値の符号と、閾値の符号とが、反対の場合には、閾値の符号又は時間差分データW_diff(i)の符号の何れか一方を反転させて、両者を比較すれば、同等の結果が得られる。こうすることで、保持するデータの記憶領域を少なくすることが出来、演算リソースを効率的に利用することが可能となる。
【0088】
この人数推定方法(二)は、上記の人数推定方法(一)の様にモデル波形W_m(i)を予め保持しておく必要性が無く、モデル波形W_m(i)との類似度を演算する必要性が無いので、使用する演算リソース量を少なくすることが出来ると言う利点を奏する。
【0089】
図9は、時間差分データ作成手段15により、図5(a)に示す連続乗車の場合の積載重量W(i)から作成された、時間差分データW_diff(i)の時系列変化の一例を示す図である。
【0090】
ステップST205に於いて、波形観測手段16は、図9に示す時間差分データW_diff(i)の正の値の位置、例えば図9のBの位置に第1閾値を設定した場合には、時間差分データW_diff(i)の時系列変化が第1閾値B以上になった回数は2回であり、乗車人数を2人と推定する。
【0091】
他方、乗客が連続降車した場合についても、波形観測手段16は、第2閾値を負の値に設定して、同様にして降車人数を推定することが出来る。
【0092】
この様に、連続乗車又は連続降車の場合でも、当該人数推定方法(二)により、乗車人数及び降車人数を推定することが出来る。
【0093】
以上より、本変形例によっても、計測手段11を重量センサのみで構成することが出来、積載重量の変化が階段状の変化でなくとも、乗降人数を検知することが出来る。
【0094】
<変形例2:人数推定方法(三)>
或いは、ステップST205に於いて、波形観測手段16は、上記の人数推定方法(一)及び上記の人数推定方法(二)とは異なる、次の人数推定方法(三)により、乗車人数及び降車人数を推定しても良い。
【0095】
即ち、ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の正の値に対して、所定の第1閾値を複数個設定する。そして、波形観測手段16は、時間差分データW_diff(i)の時系列変化が、設定した第1閾値以上になった回数(時間差分データW_diff(i)の時系列変化が設定した閾値を上方向又は下方向の何れか一方に跨いだ回数に相当。)を第1閾値毎にカウントする。そして、波形観測手段16は、第1閾値を跨いだ回数の出現数を数える。そして、波形観測手段16は、最も多い出現数の回数(時間差分データW_diff(i)の時系列変化が設定した第1閾値を上方向又は下方向の何れか一方に跨いだ回数。)を、「乗車人数」と推定する。
【0096】
他方で、波形観測手段16は、受信した時間差分データW_diff(i)の負の値に対して所定の第2閾値を複数個設定する。そして、波形観測手段16は、時間差分データW_diff(i)の時系列変化が、設定した第2閾値以下になった回数(時間差分データW_diff(i)の時系列変化が設定した第2閾値を上方向又は下方向の何れか一方に跨いだ回数に相当。)を、第2閾値毎にカウントする。そして、波形観測手段16は、同様に、第2閾値を跨いだ回数の出現数を数える。そして、波形観測手段16は、最も多い出現数の回数(時間差分データW_diff(i)の時系列変化が設定した第2閾値を上方向又は下方向の何れか一方に跨いだ回数。)を、「降車人数」と推定する。
【0097】
例えば、波形観測手段16は、図7に示す時間差分データW_diff(i)を受信した場合に、例えば閾値A,B,C,D,E,Fの様に、所定の第1閾値を複数個設定し、時間差分データW_diff(i)の時系列変化が、設定した第1閾値以上になった回数を、即ち、乗車人数の推定候補を、第1閾値毎にカウントする。
【0098】
例えば、図10は、図7に於いて、第1閾値A,B,C,D,E,Fを設定した場合に関して、時間差分データW_diff(i)の時系列変化が、第1閾値を跨ぐ回数(乗車人数の推定候補)を、第1閾値毎にカウントした上で、第1閾値を跨ぐ回数の出現数の結果を示す図である。図7に於いて、第1閾値Aを跨ぐのは1回(1人)、第1閾値Bを跨ぐのは2回(2人)、第1閾値Cを跨ぐのは2回(2人)、第1閾値Dを跨ぐのは2回(2人)、第1閾値Eを跨ぐのは3回(3人)、第1閾値Fを跨ぐのは2回(2人)である。それらの結果を踏まえて、各第1閾値を跨ぐ回数の出現数が、図10である。図10に示す様に、第1閾値を2回跨ぐので、即ち、乗車人数の推定候補2人の出現回数が、4であり最も多いので、波形観測手段16は、乗車人数を2人と推定する。
【0099】
一方、乗客が降車した場合にも、波形観測手段16は、図7に示す時間差分データW_diff(i)の負の値に関して、所定の第2閾値を複数個設定することにより、同様にして、降車人数を推定することが出来る。
【0100】
尚、各第1閾値の絶対値と各第2閾値の絶対値とが同じ場合には、波形観測手段16が保持する閾値は、第1閾値又は第2閾値の何れか一方でも良い。それに対して、時間差分データW_diff(i)の値の符号と、閾値の符号とが、反対の場合には、時間差分データW_diff(i)の値の符号又は閾値の符号のどちらか一方を反転させて両者を比較すれば、同等の効果が得られる。こうすることで、保持するデータの記憶領域を少なくすることが出来、演算リソースを効率的に利用することが可能となる。
【0101】
この人数推定方法(三)は、人数推定方法(一)よりも演算リソース量が少なく、且つ、人数推定方法(二)よりも精度良く乗車人数と降車人数とを推定することが出来る。
【0102】
又、波形観測手段16は、乗客が連続乗車した場合の図9に示す時間差分データW_diff(i)を受信した際には、例えば閾値A,B,C,D,E,Fの様に、所定の閾値を複数個設定し、時間差分データW_diff(i)の時系列変化が設定した閾値以上になった回数を、即ち、乗車人数の推定候補を閾値毎にカウントする。
【0103】
図9に於いて、閾値Aを超えるのは2回(2人)、閾値Bを超えるのは2回(2人)、閾値Cを超えるのは3回(3人)、閾値Dを超えるのは2回(2人)、閾値Eを超えるのは2回(2人)、閾値Fを超えるのは1回(1人)であり、各閾値を超える回数が同一である回数をカウントした結果は、図10に示すカウント結果となる。図10に示す様に、乗車人数の推定候補2人の出現数が4であり最も多いので、波形観測手段16は、乗車人数を2人と推定する。
【0104】
他方、乗客が連続降車した場合にも、波形観測手段16は、同様の方法により、降車人数を推定することが出来る。
【0105】
この様に、連続乗車又は連続降車でも、この人数推定方法(三)により、乗車人数及び降車人数を推定することが出来る。
【0106】
以上より、本変形例によっても、計測手段11を重量センサのみで構成することが出来、積載重量の変化が階段状の変化でなくとも、乗降人数を検知することが出来る。
【0107】
<実施の形態2の利点>
以上の様に、本実施の形態によれば、実施の形態1と同様の効果が得られると共に、計測手段11として重量センサのみで構成することが出来るため、人数検知装置1の導入コストを低減出来るという効果がある。
【0108】
又、本実施の形態によれば、時間差分データ作成手段15が計測手段11により所定のサンプリング周期で計測された積載重量の差分間隔毎の変化を演算して時間差分データを作成し、波形観測手段16が、時間差分データ作成手段15により作成された時間差分データの時系列変化と標準モデルの時系列変化又は所定の閾値とを比較して、乗車人数及び降車人数を推定する。そのため、この実施の形態2の人数推定方法によれば、特許文献1の様にエレベータの乗車人数及び降車人数を、積載重量の変化が階段状でなくとも、推定することが出来るという効果が得られる。
【0109】
又、本実施の形態によれば、乗客の連続乗車及び連続降車の場合にも、乗車人数及び降車人数を推定することが出来るという効果が得られる。
【0110】
又、本実施の形態の人数推定方法によれば、複数の計測機器を用いずに、乗車と降車とを区別して人数を検知出来るという効果が得られる。又、複数の計測機器からの複数の信号を処理しているわけではないので、複数の信号間の同期を考慮する必要性もなく、信号処理をシンプルに出来るという効果がある。
【0111】
(実施の形態3)
実施の形態1及び2では、乗車人数及び降車人数を推定するのは、計測手段11に於いて所定の計測終了条件が満たされた後である。このため、乗車人数及び降車人数は所定の計測終了条件が満たされた後にならないとわからず、乗客の乗車及び降車の直後に乗車人数及び降車人数をリアルタイムで推定することが出来ない。又、乗客の乗車及び降車の直後に乗車人数と降車人数とを推定出来ないので、乗客の乗車及び降車の直後に在場人数もリアルタイムで推定することが出来ない。そこで、本実施の形態では、乗客の乗車及び降車の直後に、乗車人数、降車人数及び在場人数を推定する方法について示す。
【0112】
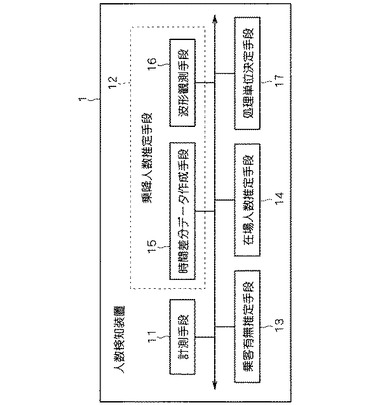
図11は、本実施の形態に係る人数検知装置1の構成を示すブロック図である。人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、及び処理単位決定手段17を備える。或いは、乗降人数推定手段12の動作として、実施の形態2で記載した人数推定方法(一)、(二)及び(三)の何れかを適用する場合には、乗降人数推定手段12は、図11に示す様に、時間差分データ作成手段15と波形観測手段16とによって構成される。尚、本実施の形態に於いても、計測手段11を除いた各手段は、マイクロコンピュータ上のソフトウェアによって構成されている。
【0113】
図11に於いて、処理単位決定手段17は、計測手段11により計測されたデータを逐次的に受信し、乗車人数及び降車人数を推定する際の1回の処理単位分のデータが計測されたか否かを判断することにより、乗降人数推定手段12によって乗車人数及び降車人数を推定する際のデータの処理単位を動的に決定する。尚、計測手段11、乗降人数推定手段12、乗客有無推定手段13、及び在場人数推定手段14は、実施の形態1の図1に示す対応構成要素と同じである。又、乗降人数推定手段12に実施の形態2を適用する場合には、その構成要素である時間差分データ作成手段15及び波形観測手段16は、実施の形態2の図4に示す対応構成要素と同じである。
【0114】
次に、本実施の形態に係る人数検知装置1の動作について記載する。
【0115】
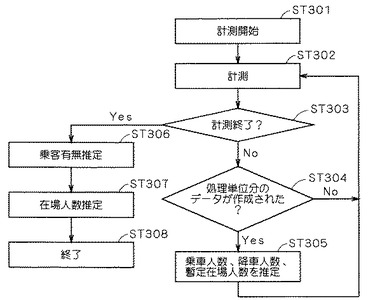
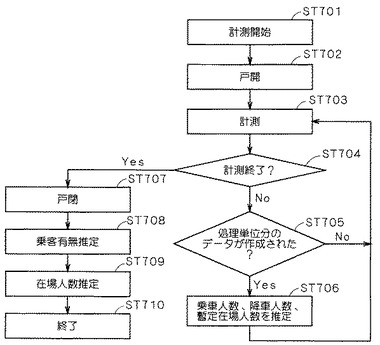
図12は、図11の乗降人数推定手段12が実施の形態1に係る図1の乗降人数推定手段12に該当する場合に於ける、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0116】
ステップST301に於いて、計測手段11は、所定の計測開始条件が満たされると、その計測を開始する。この計測手段11の計測開始条件としては、例えば所定の時刻がある。本例では、閉空間はエレベータであるため、エレベータがある階に停止してそのドアが開かれた時点が、計測手段11の計測開始条件となる。
【0117】
ステップST302に於いて、計測手段11は計測する。
【0118】
ステップST303に於いて、計測手段11は、所定の計測終了条件が満たされたか否かを判断する。ステップST303で、所定の計測終了条件が満たされていない場合には、人数検知装置1はステップST304に進む。又、ステップST303に於いて、所定の計測終了条件が満たされた場合には、計測手段11は計測を終了し、人数検知装置1はステップST306に進む。計測手段11の計測終了条件としては、例えば所定の時刻がある。また、計測終了条件として、計測開始からの所定の経過時間としても良い。本例では、閉空間はエレベータであるので、エレベータのドアが閉まった時点が、計測終了条件となる。
【0119】
ステップST304に於いて、処理単位決定手段17は、計測手段11により計測されたデータを逐次的に受信し、乗降人数推定手段12により乗車人数及び降車人数を推定する際の1回の処理単位分のデータが計測されたか否かを判断する。
【0120】
ステップST304にて、処理単位決定手段17が、乗車人数及び降車人数を推定する際の1回の処理単位分のデータが計測されたと判断すると、ステップST305に於いて、乗降人数推定手段12は、処理単位決定手段17から、乗車人数及び降車人数を推定する際の1回の処理単位分のデータを受信し、実施の形態1に既述した方法により乗車人数及び降車人数を推定する。
【0121】
尚、本実施の形態では、乗降人数推定手段12が乗車人数及び降車人数の推定を行っている間は、いまだ計測手段11の計測期間中である。このため、当該計測期間中に最終的に何人が乗車し、何人が降車したのかは、計測手段11が計測を終了するまでは決定出来ない。ステップST305に於いて推定された乗車人数及び降車人数は、その時点での乗降動作で乗車及び降車した人数であり、計測期間中を通した乗車人数及び降車人数とは別である。そこで、両者を区別するために、前者を「暫定乗車人数」及び「暫定降車人数」と、後者をこれまで通り「乗車人数」及び「降車人数」と、それぞれ定義する。又、乗車人数及び降車人数の各々の初期値は0人とする。同様に、計測期間中の在場人数と、計測終了後の在場人数とは別概念である。そこで、前者を「暫定在場人数」と、後者をこれまで通り「戸閉後在場人数」と定義する。又、暫定在場人数の初期値は、戸開前在場人数とする。
【0122】
そして、乗降人数推定手段12は、前回の処理単位に於ける乗車人数、降車人数及び暫定在場人数を用いて、自らが推定した暫定乗車人数及び暫定降車人数から、数4の各式(4)〜(6)により、エレベータの乗車人数、降車人数及び暫定在場人数を求める。
【0123】
【数4】
【0124】
ステップST303に於いて、計測終了条件が満たされると、ステップST306に於いて、乗客有無検知手段13は、計測期間中に計測した、乗客有無の推定に必要なデータを、計測手段11から受信し、実施の形態1に於いて記載した乗客有無推定方法(一)及び(二)の内で何れかの方法により、乗客有無を推定する。
【0125】
ステップST307に於いて、在場人数推定手段14は、乗降人数推定手段12から暫定在場人数を受信する。加えて、在場人数推定手段14は、乗客有無推定手段14から乗客有無の推定結果を受信する。そして、乗客有無の推定結果が“無”である場合には、在場人数推定手段14は、エレベータの戸閉後の在場人数を0人にリセットする。逆に、乗客有無の推定結果が“有”である場合には、在場人数推定手段14は、乗降人数推定手段12により受信した計測終了時点での上記式(6)で求められた最終的な暫定在場人数を、エレベータの戸閉後在場人数に設定する。
【0126】
尚、図12では、乗客有無検知手段13は、ステップST303に於いて計測が終了してから、ステップST306でのみ乗客の有無を推定する様にしているが、乗客有無検知手段13は、計測期間中に、乗客有無の推定に必要なデータを、計測手段11から計測期間中、逐次的に受信して、実施の形態1に於いて記載した乗客有無推定方法(一)及び(二)の内の何れかの方法により、常に乗客の有無を推定していても良い。この場合に於いて、乗客有無の推定結果が“無”であるときには、乗降人数推定手段12は、暫定在場人数を0人にリセットする。
【0127】
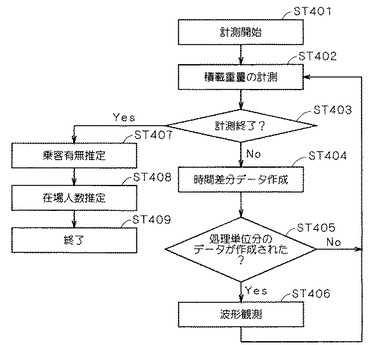
次に、乗降人数推定手段12が、実施の形態2の様に、時間差分データ作成手段15と波形観測手段16とによって構成されている場合の、人数検知装置1の動作について記載する。図13は、その場合に於ける人数検知装置1の動作を示すフローチャートである。
【0128】
図13に於いて、ステップST401の動作は、図12に示すステップST301の動作と同一のため、ここでの説明を省略する。
【0129】
ステップST402において、計測手段(重量センサ)11は、所定のサンプリング周期で、エレベータの積載重量W(i)を計測する。
【0130】
ステップST403の動作は、図12に示すステップST303の動作と同一のため、ここでの説明を割愛する。
【0131】
ステップST404に於いて、時間差分データ作成手段15は、計測手段11により計測された積載重量を逐次的に受信し、上記の式(2)を利用して、時間差分データW_diff(i)を逐次的に作成する。
【0132】
ステップST405に於いて、処理単位決定手段17は、時間差分データ作成手段15により作成された時間差分データW_diff(i)を逐次的に受信し、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたか否かを判断する。
【0133】
ここで、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたか否かを、処理単位決定手段17が判断する際の方法を示す。
【0134】
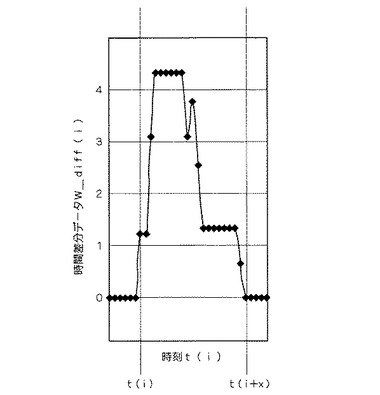
図14は、時間差分データ作成手段15により作成された時間差分データW_diff(i)の時系列変化の一例を示す図である。乗客がエレベータから乗車する場合には、図14に示す様に、時刻t(i)に時間差分データW_diff(i)が0より大きな値を示してから、時刻t(i+x)に時間差分データW_diff(i)が再び0の値を示す。他方、乗客がエレベータから降車する場合には、時刻t(i)に於いて時間差分データW_diff(i)は0より小さな値を示してから、時刻t(i+x)に時間差分データW_diff(i)が再び0の値を示す。このことから、処理単位決定手段17は、例えば、時間差分データW_diff(i)が0よりも大きな値を示してから、再び0の値を示す時刻t(i+x)に於いて、波形観測手段16が乗車人数及び降車人数を推定するための1回の処理単位分の時間差分データW_diff(i)が作成されたものと、判断する。このときの波形観測手段16が乗車人数及び降車人数を推定するための1回の処理単位分の時間差分データW_diff(i)とは、時刻t(i−1)〜時刻t(i+x)までの時間差分データである。
【0135】
図13のステップST405に於いて、処理単位決定手段17が、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたと判断出来る迄、人数検知装置1は、ステップST402〜ステップST404の動作を繰り返す。
【0136】
ステップST405に於いて、処理単位決定手段17が、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたものと判断すると、ステップST406に進む。ステップST406に於いて、波形観測手段16は、時間差分データ作成手段15又は処理単位決定手段17から、乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)を受信し、実施の形態2に於いて記載した人数推定方法(一)、(二)、(三)の何れかの方法により、暫定乗車人数及び暫定降車人数を推定する。その上で、波形観測手段16は、既述した式(4)、(5)、(6)に基づいて、エレベータの乗車/降車/暫定在場人数を求める。
【0137】
ステップST403に於いて計測終了条件が満たされると、ステップST407に於いて、乗客有無検知手段13は、計測手段11又は時間差分データ作成手段15から、積載重量W(i)を受信し、実施の形態1に於いて既述した乗客有無推定方法(一)及び(二)の何れかの方法により、乗客有無を推定する。
【0138】
図13に於いて、ステップST408の動作は、図12に示すステップST307の動作と同一のため、ここでの説明を割愛する。
【0139】
尚、図13では、乗客有無検知手段13は、ステップST403に於いて計測が終了してから、ステップST407でのみ乗客の有無を推定する様にしているが、乗客有無検知手段13は、計測期間中に、乗客有無の推定に必要なデータを、計測手段11から計測期間中、逐次的に受信して、実施の形態1に於いて記載した乗客有無推定方法(一)及び(二)の内の何れかの方法により、常に乗客の有無を推定していても良い。この場合に於いて、乗客有無の推定結果が“無”であるときには、乗降人数推定手段12は、暫定在場人数を0人にリセットする。
【0140】
尚、本実施の形態では、図11に示す様に、処理単位決定手段17を独立の構成要素として示しているが、乗降人数推定手段12又は、時間差分データ作成手段15又は波形観測手段16の一方が、既述した処理単位決定手段17の機能を有する構成としても良い。
【0141】
以上の様に、本実施の形態によれば、実施の形態1及び2と同様の効果が得られると共に、乗車人数及び降車人数を推定する際のデータの処理単位を動的に決定することにより、乗客の乗車及び降車の直後に、エレベータの乗車人数及び降車人数を推定することが出来るという効果が得られる。
【0142】
加えて、本実施の形態によれば、乗客の乗車及び降車の直後に、エレベータの乗車人数及び降車人数を推定することが出来るので、乗客の乗車及び降車の直後に於けるエレベータ内の在場人数(暫定在場人数)をも推定することが出来るという効果が、得られる。
【0143】
(実施の形態4)
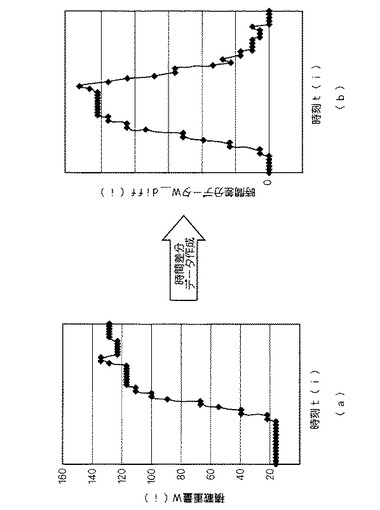
既述した特許文献3及び4では、ドア付近に設置された光電センサによって乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にドアを通過すると、乗車人数と降車人数とを精度良く推定することが難しくなる。
【0144】
又、実施の形態2では、積載重量W(i)とその時間差分データW_diff(i)とによって乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にエレベータに乗車すると、図15(a)に示す様な積載重量W(i)の時系列変化と、図15(b)に示す様な時間差分データW_diff(i)の時系列変化が得られる場合がある。この様な場合には、実施の形態2に於いて既述した波形観測手段16による人数推定方法(一)、(二)及び(三)の何れかを用いて乗客が2人であると判定することが難しくなる。
【0145】
そこで、以上の問題点に鑑みて、本実施の形態では、乗車人数及び降車人数の推定精度を更に向上させる方法について記載する。
【0146】
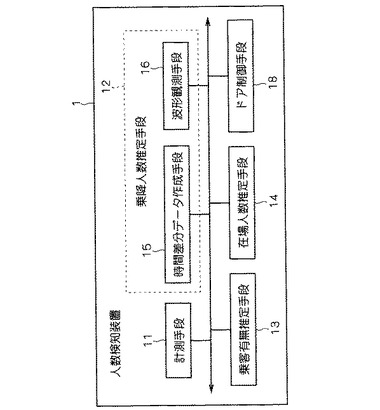
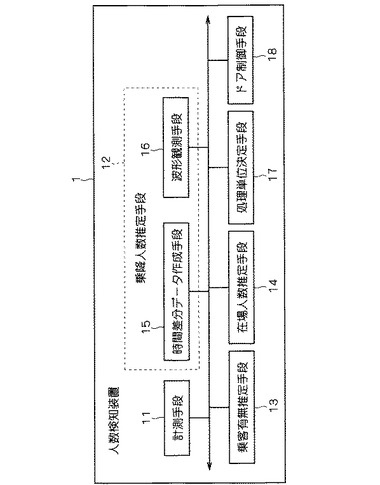
図16は、本実施の形態に係る人数検知装置1の構成を示すブロック図である。この人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14及びドア制御手段18を備える。又、乗降人数推定手段12に於ける人数推定方法として実施の形態2で述べた人数推定方法(一)、(二)及び(三)の何れかを利用する場合には、乗降人数推定手段12は、時間差分データ作成手段15と波形観測手段16とによって構成される。図16に於いても、計測手段11を除いて、その他の各手段はマイクロコンピュータ上のソフトウェアによって構成されている。
【0147】
図16に於いて、ドア制御手段18は、計測手段11が乗客の乗降を計測する際に、乗客が1人ずつエレベータの出入口を通過する様に、エレベータのドアの開き方を制御する。尚、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、時間差分データ作成手段15及び波形観測手段16は、実施の形態1の図1又は実施の形態2の図4に示す対応構成要素と同一である。
【0148】
次に、本実施の形態に係る人数検知装置1の動作について記載する。ここで、図17は、当該人数検知装置1の動作を示すフローチャートである。図17の場合では、乗降人数推定手段12は、実施の形態1に係る図1の乗降人数推定手段12に相当する。
【0149】
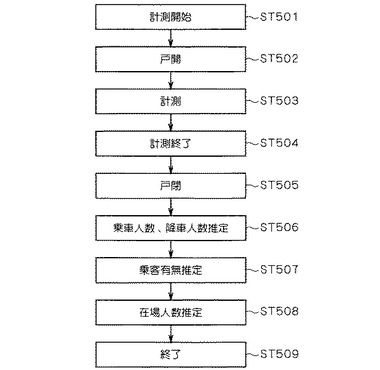
ステップST501に於いて、計測手段11は、所定の計測開始条件が満たされると、その計測を開始する。計測手段11の計測開始条件としては、例えば所定の時刻がある。本例では、閉空間はエレベータであるので、計測開始条件は、エレベータがある階に停止してそのドアを開ける動作を開始する時点に相当する。
【0150】
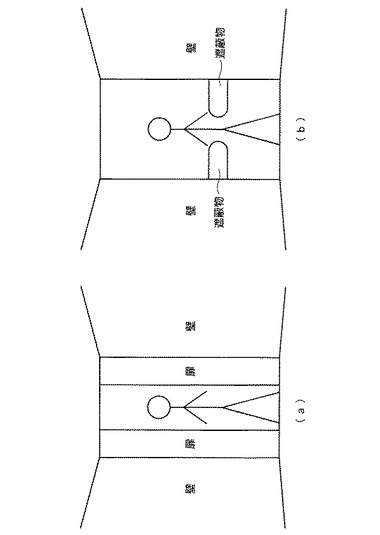
ステップST502に於いて、ドア制御手段18は、エレベータのドアを開ける。ここで、図18は、ドア制御手段18によるエレベータのドアの開き方の制御を示す図である。ステップST502に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(a)に示す様に、乗客が1人ずつしか通過出来ない幅Wnまでしかドアが開かない様に、ドアの開き方を制御する。或いは、ドア制御手段18は、ドアを開く際に、図18(b)に示す様に、乗客が1人ずつしか通過出来ない様にするための遮蔽物を出現させることとしても良い。乗客が1人ずつしか通過できない幅Wnのデータは、予めドア制御手段18によって保持されているものとする。この様なドアの制御方法を、ドア制御方法(一)と定義する。
【0151】
図17のステップST503に於いて、計測手段11は計測する。
【0152】
ステップST504に於いて、計測手段11は、所定の計測終了条件が満たされると、計測を終了する。計測手段11の計測終了条件としては、例えば所定の時刻がある。又、計測終了条件として、計測開始からの所定の経過時間としても良い。
【0153】
ステップST505に於いて、ドア制御手段18は、エレベータのドアを閉める。
【0154】
図17に於いて、以降の各ステップST506〜ステップST508の動作は、それぞれ、実施の形態1の図2に示すステップST103〜ステップST105の動作と同一のため、ここでの説明を省略する。
【0155】
次に、実施の形態2の図4の乗降人数推定手段12と同様に、図16の乗降人数推定手段12が、時間差分データ作成手段15と波形観測手段16とによって構成される場合の、人数検知装置1の動作について説明する。ここで、図19は、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0156】
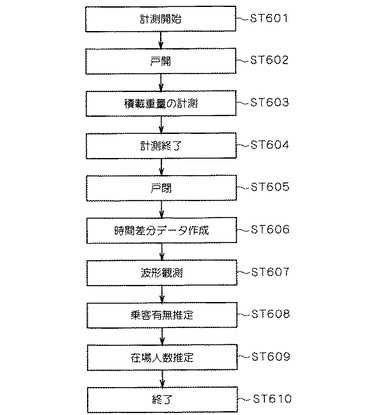
図19に於いて、ステップST601及びステップST602の動作は、それぞれ、図17に示すステップST501及びステップST502の動作と同一のため、ここでの説明を省略する。
【0157】
ステップST603に於いて、計測手段11は、所定のサンプリング周期で、エレベータの積載重量W(i)を計測する。
【0158】
図19に於いて、ステップST604及びステップST605の動作は、それぞれ、図17に示すステップST504及びステップST505の動作と同一のため、ここでの説明を省略する。
【0159】
図19に於いて、ステップST606〜ステップST609の動作は、それぞれ、実施の形態2の図6のステップST204〜ステップST207の動作と同一のため、ここでの説明を省略する。
【0160】
尚、ステップST501又はステップST601に於ける計測手段11の計測開始条件として、ドアの戸開信号を使用しても良い。この場合、ステップST502又はステップST602の戸開動作と、ステップST501又はステップST601の計測開始動作との順番は入れ替わる。そして、順番が入れ替わったステップST501又はステップST601では、計測手段11は、ドア制御手段18から戸開信号を受信して、その計測を開始する。
【0161】
又、ステップST504又はステップST604における計測手段11の計測終了条件として、ドアの戸閉信号を使用しても良い。この場合、ステップST505又はステップST605の戸閉動作と、ステップST504又はステップST604の計測終了動作との順番は入れ替わる。そして、順番が入れ替わったステップST504又はステップST604では、計測手段11は、ドア制御手段18から戸閉信号を受信して、その計測を終了する。
【0162】
又、ステップST502又はステップST602に於いて、ドア制御手段18は、ドア制御方法(一)とは異なる、次のドア制御方法(二)で以って、ドアの開き方を制御しても良い。即ち、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(a)に示す様に、乗客が1人ずつしか通過できない幅まで通常の速度(速度A)で開け、その後、通常の速度よりも遅い速度(速度B)でドアを全開まで開く様に、ドアの開き方を制御する。又、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(b)に示す様に、乗客が1人ずつしか通過できない幅となる様に遮蔽物を通常の速度(速度A)で出現させ、その後は、通常の速度よりも遅い速度(速度B)で遮蔽物を撤収させる様に遮蔽物を制御する。速度Aと速度Bとは、予めドア制御手段18によって決められているものとする。
【0163】
1人ずつしか通過出来ない幅までしかドアが開かないと、大きな荷物を抱えている等の理由でドアを通過することが出来なかった人も、ドア制御方法(二)では、時間経過後にドアを通過することが出来る様になる。
【0164】
又、ステップST502又はステップST602に於いて、ドア制御手段18が、ドア制御方法(二)によってドアの開き方を制御している場合に、ドア近くにあるドア開登録手段を操作すると、ドア制御手段18は、速度Bよりも速い速度で、ドアが全開まで開く様にドアを制御する、或いは、速度Bよりも速い速度で遮蔽物を撤収する様に遮蔽物を制御しても良い。ここで、「ドア開登録手段」とは、例えば、エレベータの戸開ボタンである。
【0165】
この様な制御により、ドアが全開するまで待つことなく、乗客はエレベータのドアを通過することが出来る様になる。
【0166】
又、ステップST502又はステップST602に於いて、ドア制御手段18が、ドア制御方法(二)によってドアの開き方を制御している場合に、乗客がドア近くにあるドア閉登録手段を操作すると、ドア制御手段18は、ドアが反転して閉まる様にドアを制御する、或いは、遮蔽物を出現させて通過出来なくなる様に遮蔽物を制御しても良い。ここで、「ドア閉登録手段」とは、例えば、エレベータの戸閉ボタンである。
【0167】
これにより、外気が寒い等の理由でドアを早く閉めたり、或いは、遮蔽物で外気を早く遮断したりすることが出来る。又、ドアを早く閉めて、エレベータを早く出発させることが可能となる。
【0168】
又、ステップST502又はステップST602に於いて、ドア制御手段18は、ドア制御方法(一)及び(二)とは異なる、次のドア制御方法(三)で以ってドアの開き方を制御しても良い。即ち、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(a)に示す様に、乗客が1人ずつしか通過出来ない幅まで開け、一定時間の経過後にドアを全開まで開ける。又、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(b)に示す様に、乗客が1人ずつしか通過出来ない幅となる様に遮蔽物を出現させ、一定時間の経過後に遮蔽物を撤収させる様にドアの開き方を制御する。
【0169】
1人ずつしか通過出来ない幅までしかドアが開かないと、大きな荷物を抱えている等の理由で、ドアを通過することが出来なかった人も、ドア制御方法(三)では、一定時間の経過後にドアを通過することが出来る様になる。
【0170】
又、ステップST502又はステップST602に於いて、ドア制御手段18がドア制御方法(三)によってドアの開き方を制御している場合に、乗客がドア近くにあるドア開登録手段を操作すると、ドア制御手段18は、直ぐにドアが全開まで開く様にドアを制御する、或いは、直ぐに遮蔽物を撤収する様に遮蔽物を制御しても良い。ここで、「ドア開登録手段」とは、例えば、エレベータの戸開ボタンである。
【0171】
この制御方法の採用により、ドアが全開するまで待つことなく、乗客はドアを通過することが出来る様になる。
【0172】
又、ステップST502又はステップST602に於いて、ドア制御手段18がドア制御方法(三)によってドアの開き方を制御している場合に、乗客がドア近くにあるドア閉ボタンを押すと、ドア制御手段18は、ドアが反転して閉まる様にドアを制御する、或いは、遮蔽物を出現させて通過出来なくなる様に遮蔽物を制御することとしても良い。
【0173】
これにより、外気が寒い等の理由でドアを早く閉めたり、或いは、遮蔽物で外気を早く遮断したりすることが出来る。又、ドアを早く閉めて、エレベータを早く出発させることが可能となる。
【0174】
尚、本実施の形態では、ドア制御手段18として、既設のエレベータのドア制御器を使用しても良いし、人数検知装置1専用のドア制御器を使用しても良い。しかし、既設のエレベータのドア制御器をドア制御手段18として活用することにより、本実施の形態に係る人数検知装置1の導入コストを低減することが出来るという効果が得られる。
【0175】
以上の様に、本実施の形態によれば、実施の形態1、2と同様の効果が得られると共に、計測手段11がエレベータの積載重量を計測する際に、ドア制御手段18がエレベータのドアの開き方を乗客が1人ずつ通過する様にドアを制御することにより、複数の乗客が横に並んで同時にエレベータに乗降車することを防止し、乗車人数、降車人数及び在場人数の推定精度を更に向上させることが出来るという効果が得られる。
【0176】
(実施の形態5)
特許文献3及び4では、ドア付近に設置された光電センサによって、乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にドアを通過すると、乗車人数と降車人数とを精度良く推定することが難しくなる。
【0177】
又、実施の形態2では、積載重量W(i)とその時間差分データW_diff(i)とによって乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にエレベータに乗車すると、図15(a)に示す様な積載重量W(i)の時系列変化と、図15(b)に示す様な時間差分データW_diff(i)の時系列変化とが生じる場合がある。この場合、実施の形態2に於いて記載した波形観測手段16による人数推定方法(一)、(二)、(三)の何れかの方法により2人と判定することが難しくなる。
【0178】
そこで、本実施の形態では、乗車人数及び降車人数の推定精度を更に向上させる方法について示す。より詳細には、本実施の形態の特徴点は、既述した実施の形態3に実施の形態4で既述した技術を適用した点にある。
【0179】
図20は、本実施の形態に係る人数検知装置1の構成を示すブロック図である。この人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、処理単位決定手段17及びドア制御手段18を備える。尚、乗降人数推定手段12に於ける人数推定方法として、実施の形態2で述べた人数推定方法(一)、(二)、(三)の何れかの方法を利用する場合には、実施の形態2と同様に、乗降人数推定手段12は、時間差分データ作成手段15と波形観測手段16とによって構成される。本実施の形態でも、計測手段11を除いて、その他の各手段はマイクロコンピュータ上のソフトウェアによって構成されている。
【0180】
図20に於いて、ドア制御手段18は、計測手段11が計測する際に、エレベータのドアの開き方を乗客が1人ずつ通過するように制御する。尚、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、時間差分データ作成手段15、波形観測手段16、及び処理単位決定手段17は、実施の形態1の図1、実施の形態2の図4、実施の形態3の図11に示す対応構成要素と同一である。
【0181】
次に、本実施の形態に係る人数検知装置1の動作について、図面を参照して記載する。
【0182】
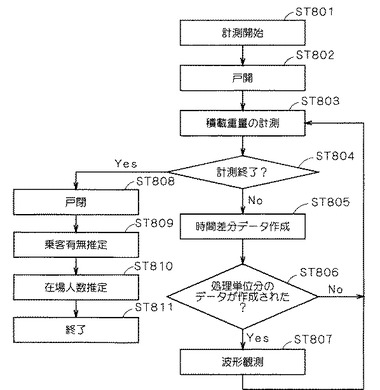
図21は、図20の乗降人数推定手段12が実施の形態1の図1の乗降人数推定手段12に対応する場合に於ける、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0183】
図21に於いて、ステップST701〜ステップST704の動作は、実施の形態4の図17に示すステップST501〜ステップST504の動作と同一のため、ここでの説明を省略する。
【0184】
又、図21に於いて、ステップST705及びステップST706の動作は、それぞれ、実施の形態3の図12に示すステップST304及びステップST305の動作と同一のため、ここでの説明を同様に省略する。
【0185】
又、図21に於けるステップST707の動作は、実施の形態4の図17に示すステップST505の動作と同一のため、ここでの説明を省略する。
【0186】
図21に於いて、ステップST708及びステップST709の動作は、それぞれ、実施の形態4の図17に示すステップST507及びステップST508の動作と同一のため、ここでの説明を省略する。
【0187】
次に、乗降人数推定手段12が時間差分データ作成手段15と波形観測手段16とによって構成されている場合の、図20の人数検知装置1の動作について、図22のフローチャートを参照して記載する。
【0188】
図22に於いて、ステップST801〜ステップST804の動作は、それぞれ、実施の形態4の図19に示すステップST601〜ステップST604の動作と同一のため、ここでの説明を省略する。
【0189】
又、図22に於ける、ステップST805〜ステップST807の動作は、それぞれ、実施の形態3の図13に示すステップST404〜ステップST406の動作と同一のため、ここでの説明を省略する。
【0190】
又、図22に於けるステップST808〜ステップST810の動作は、それぞれ、実施の形態5の図21に示すステップST707〜ステップST709の動作と同一のため、ここでの説明を省略する。
【0191】
尚、ステップST701又はステップST801に於ける計測手段11の計測開始条件として、ドアの戸開信号を使用しても良い。この場合には、ステップST702又はステップST802の戸開動作と、ステップST701又はステップST801の計測開始動作との順番は入れ替わる。そして、順番が入れ替わったステップST701又はステップST801では、計測手段11は、ドア制御手段18から戸開信号を受信して、その計測を開始する。
【0192】
又、ステップST704又はステップST804に於ける計測手段11の計測終了条件として、ドアの戸閉信号を使用しても良い。この場合には、ステップST707又はステップST808の戸閉動作と、ステップST704又はステップST804の計測終了動作との順番は入れ替わる。そして、順番が入れ替わったステップST704又はステップST804では、計測手段11は、ドア制御手段18から戸閉信号を受信して、その計測を終了する。
【0193】
尚、本実施の形態では、ドア制御手段18として、既設のエレベータのドア制御器を使用しても良いし、人数検知装置1専用のドア制御器を使用しても良い。しかし、既設のエレベータのドア制御器をドア制御手段18として活用することにより、本実施の形態に係る人数検知装置1の導入コストを低減することが出来るという効果がある。
【0194】
以上の様に、本実施の形態によれば、実施の形態3と同様の効果が得られると共に、計測手段11がエレベータの積載重量を計測する際に、ドア制御手段18がエレベータのドアの開き方を乗客が1人ずつ通過する様に制御することにより、複数の乗客が横に並んで同時にエレベータに乗降車することを防止し、以って、乗車人数、降車人数及び在場人数の推定精度を更に向上させることが出来ると言う効果が得られる。
【0195】
(付記)
以上、本発明の実施の形態を詳細に開示し記述したが、以上の記述は本発明の適用可能な局面を例示したものであって、本発明はこれに限定されるものではない。即ち、記述した局面に対する様々な修正や変形例を、この発明の範囲から逸脱することの無い範囲内で考えることが可能である。
【図面の簡単な説明】
【0196】
【図1】本発明の実施の形態1に係る人数検知装置の構成を示すブロック図である。
【図2】実施の形態1に係る人数検知装置の動作を示すフローチャートである。
【図3】エレベータの積載重量の時系列変化を示す図である。
【図4】本発明の実施の形態2に係る人数検知装置の構成を示すブロック図である。
【図5】エレベータの積載重量の時系列変化を示す図である。
【図6】実施の形態2に係る人数検知装置の動作を示すフローチャートである。
【図7】実施の形態2に係る人数検知装置の時間差分データ作成手段により作成された時間差分データの時系列変化の一例を示す図である。
【図8】実施の形態2に係る人数検知装置の波形観測手段が予め保持している標準モデルの時間差分データの時系列変化を示す図である。
【図9】実施の形態2に係る人数検知装置の時間差分データ作成手段により連続乗車の積載重量から作成された時間差分データの時系列変化の一例を示す図である。
【図10】実施の形態2に係る人数検知装置の波形観測手段により時間差分データの時系列変化が閾値以上になった回数(乗車人数の推定候補)を閾値毎にカウントした結果の一例を示す図である。
【図11】本発明の実施の形態3に係る人数検知装置の構成を示すブロック図である。
【図12】実施の形態3に係る人数検知装置の動作を示すフローチャートである。
【図13】実施の形態3に係る人数検知装置の動作を示すフローチャートである。
【図14】実施の形態3に係る人数検知装置の時間差分データ作成手段により作成された時間差分データの時系列変化の一例を示す図である。
【図15】乗客2人が横に並んで同時にエレベータに乗車するときに生じ得る、人数検知装置の時間差分データ作成手段により作成された時間差分データの時系列変化の一例を示す図である。
【図16】本発明の実施の形態4に係る人数検知装置の構成を示すブロック図である。
【図17】実施の形態4に係る人数検知装置の動作を示すフローチャートである。
【図18】実施の形態4に係る人数検知装置のドア制御手段によるエレベータのドアの開き方の制御方法を示す図である。
【図19】実施の形態4に係る人数検知装置の動作を示すフローチャートである。
【図20】本発明の実施の形態5に係る人数検知装置の構成を示すブロック図である。
【図21】実施の形態5に係る人数検知装置の動作を示すフローチャートである。
【図22】実施の形態5に係る人数検知装置の動作を示すフローチャートである。
【符号の説明】
【0197】
1 人数検知装置、11 計測手段、12 乗降人数推定手段、13 乗客有無推定手段、14 在場人数推定手段、15 時間差分データ作成手段、16 波形観測手段、17 処理単位決定手段、18 ドア制御手段。
【技術分野】
【0001】
この発明は、エレベータ等の閉空間内の乗車人数、降車人数及び在場人数を検知するための人数検知装置に関する。
【背景技術】
【0002】
エレベータによる防犯機能の向上を図る上で、エレベータへの乗車人数、エレベータからの降車人数、及びエレベータ内の在場人数を精度良く検知することは重要である。
【0003】
従来の人数検知装置として、例えば、特許文献1に記載の特許発明は、箱の積載重量を停止中に継続的に計測し、計測データを濾波し、箱の積載重量データに基づきエレベータの箱内の乗客の移送人数を判定するものであり、停止中に生じる階段状の積載重量の変化を記録し、エレベータの箱に出入りした人数を階段状変化に基づき判定している。
【0004】
又、特許文献2に記載の発明は、積載重量を平均体重値で割った値を在場人数としている。
【0005】
又、特許文献3に記載の発明は、単数の発受光素子から得られるドア通過検出信号から在場人数をカウントすることとしている。
【0006】
又、特許文献4に記載の発明は、複数の光電センサから感知信号によって乗車人数、降車人数を検出することとしている。
【0007】
【特許文献1】特許第2597448号公報
【特許文献2】特開昭55−56963号公報(第2頁右上欄の第6行〜第9行)
【特許文献3】特開2006−168930号公報
【特許文献4】特開平11−35242号公報
【特許文献5】特開2006−70653号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
先ず、乗車人数及び降車人数の検知に関する問題点を、以下に指摘する。
【0009】
特許文献1に記載の従来の人数検知装置は以上の様に構成されているので、積載重量の階段状変化を記録し、積載重量の変化の回数と方向とから乗車人数及び降車人数を検知する場合には、積載重量の値は時間軸に対して平行又は垂直方向に直線的で階段状の変化でなければならない。しかしながら、実際に乗客が乗降したときの積載重量の値は、時間軸に対して曲線的な変化を示すため、積載重量の波形を、階段状に濾波する手段を併用しなければ、現実的な乗車人数及び降車人数を推定することが出来ないという問題点があった。
【0010】
又、特許文献2に記載の様に、積載重量を平均体重値で割った値を在場人数とし、在場人数を乗車人数に等しいと考える場合には、“エレベータに人が乗車するときには元々のエレベータ内には人がいない”という条件下のみでしか、在場人数=乗車人数という考え方は成立しないという問題点があった。
【0011】
又、特許文献3の第8頁の第21行〜第30行に記載の様に、エレベータ内の様な閉空間を撮影している画像の処理によって在場人数を検知し、在場人数を乗車人数と等しいと考える場合にも、同様に、“エレベータに人が乗車するときには元々のエレベータ内には人がいない”という条件下のみでしか、在場人数=乗車人数という考え方は成立しないという問題点があった。
【0012】
更に、特許文献2及び特許文献3の第8頁第21行〜第30行に記載の様に、積載重量を平均体重で割る方法、或いは、画像処理で在場人数を検知する方法の場合に、例えば乗客2人が降車後、乗客2人が乗車すると、在場人数に変化がない。その結果、乗車人数と降車人数とを検知出来ないという問題点があった。
【0013】
更に、特許文献3の第8頁第21行〜第30行に記載の様に、エレベータ内の様な閉空間の出入り口を撮影している画像の処理によって、乗車人数及び降車人数を検知する場合には、演算量が比較的多くなり、演算リソースが増加するので、人数検知装置の導入コストが増加するという問題点があった。しかも、乗車と降車とを区別するために、複数のカメラを設置するときには、人数検知装置の導入コストが更に増加するという問題点があった。
【0014】
更に、特許文献3の第8頁第11行〜第15行に記載の様に、ドア付近に設置される単体の光電センサによって人数を検知する場合には、乗車と降車とを区別することが難しいという問題点があった。
【0015】
又、特許文献4の様に、乗車と降車とを区別するために、ドア付近に複数の光電センサを設置するときには、複数の信号の処理が複雑となるという問題点があり、しかも、人数検知装置の導入コストが増加するという問題点があった。
【0016】
次に、在場人数の検知に関する先行技術の問題点を以下に指摘する。
【0017】
特許文献2に記載の従来の人数検知装置は以上の様に構成されているので、積載重量を平均体重値で割った値を在場人数とする場合には、実際の乗客の重量と平均体重との差により在場人数の検知精度が劣化するという問題点があった。
【0018】
又、特許文献3の第8頁第21行〜第30行に記載する様に、エレベータ内の様な閉空間を撮影している画像の処理によって在場人数を検知する場合には、演算量が比較的多くなり、演算リソースが増加するので、人数検知装置の導入コストが増加するという問題点があった。しかも、障害物又は撮影範囲の制限等により撮影範囲内に対象となる人が写らない場合には、在場人数の検知精度が劣化するという問題点もあった。
【0019】
又、上記の受発光素子、画像、或いは積載重量によって推定される乗車人数と降車人数との加減算から、在場人数を求める場合には、その階の乗車人数及び降車人数を100%正確に検知し得たとしても、正しい在場人数を検知できないことが有り得るという問題点があった。例えば、エレベータが1階で戸閉し、出発するときの在場人数(戸閉後在場人数)は、1階での乗車人数と降車人数とに加え、1階に到着したときに既に乗っていた在場人数(戸開前在場人数)を考慮しなければならない。戸開前在場人数が間違っていると、1階での乗車人数と降車人数とを100%正確に検知し得ても、戸閉後在場人数は正しくならない。そして、戸開前在場人数は、1階に停止する前に停止した各階での乗車人数及び降車人数に依存するため、1階に停止する前に停止した各階での乗車人数と降車人数とを1度でも誤検知すると、1階の戸閉後在場人数は正しく検知されず、その後も誤りが訂正されないという問題点があった(特許文献1〜5を参照。)。
【0020】
尚、以上に記載した問題点は、エレベータにのみ限られるものではなく、一般的に、扉が開閉して人が出入り可能な閉空間内の人数検知装置についても言えることである。
【0021】
この発明は上記の課題を解決するためになされたものであり、エレベータ等の閉空間内の乗車人数、降車人数及び在場人数を精度良く推定することが可能な人数検知装置を得ることを、その主目的とする。
【課題を解決するための手段】
【0022】
この発明の主題は、人数検知装置であって、閉空間内の乗車人数及び降車人数を推定するためのデータを計測する計測手段と、前記計測手段により計測されたデータに基づいて乗車人数及び降車人数を推定する乗降人数推定手段と、前記計測手段により計測されたデータに基づいて前記閉空間内の乗客有無を推定する乗客有無推定手段と、前記乗降人数推定手段により推定された乗車人数及び降車人数の推定結果と、前記乗客有無推定手段の乗客有無推定結果とを受信して、(ア)前記乗客有無推定結果が無である場合には、前記閉空間内の在場人数を0人にリセットし、(イ)前記乗客有無推定結果が有である場合には、戸開前在場人数を前回の前記閉空間内の在場人数の推定結果とすると、{(前記戸開前在場人数)+(前記乗車人数の推定結果)−(前記降車人数の推定結果)}で与えられる式から前記閉空間内の在場人数を推定する在場人数推定手段とを備えることを特徴とする。
【0023】
以下、この発明の主題の様々な具体化を、添付図面を基に、その効果・利点と共に、詳述する。
【発明の効果】
【0024】
本発明の主題によれば、エレベータ等の閉空間内の乗車人数、降車人数、及び在場人数を精度良く推定することが出来る。
【発明を実施するための最良の形態】
【0025】
(実施の形態1)
本実施の形態では、「扉が開閉し、人が乗降する閉空間」は、説明の便宜上、その典型例として、エレベータであるとする。
【0026】
図1は、本実施の形態に係るエレベータ用人数検知装置1の構成を示すブロック図である。図1の人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13及び在場人数推定手段14を備えている。これらの手段の内で、ハードウェアである計測手段11を除いて、各手段12〜14は、マイクロコンピュータ上のソフトウェアによって構成されている。
【0027】
計測手段11は、例えば、エレベータに設置されている重量センサ、光電センサ或いはカメラの何れか又はそれらの組合せより成り、重量センサ、光電センサ或いはカメラの各々は、積載重量、感知結果又は監視画像を計測する。
【0028】
乗降人数推定手段12は、計測手段11の計測結果を基に、エレベータに乗車する乗車人数、及び、エレベータから降車する降車人数を推定する。
【0029】
乗客有無推定手段13は、計測手段11の計測結果を基に、エレベータ内の乗客の有無を推定する。
【0030】
在場人数推定手段14は、乗降人数推定手段12の乗降人数推定結果と、乗客有無推定手段13の乗客有無推定結果とを基に、エレベータ内の在場人数を推定する。
【0031】
次に、図1の人数検知装置1の動作について図面を踏まえて記載する。
【0032】
図2は、本実施の形態に係る図1の人数検知装置1の動作を示すフローチャートである。
【0033】
ステップST101に於いて、計測手段11は、一般的な閉空間用の場合には、予め決められた所定の計測開始条件が満たされると、計測を開始する。この計測手段11の計測開始条件としては、例えば予め決められた所定の時刻がある。本実施の形態の例では閉空間はエレベータであるので、エレベータが或る階に停止してその扉が開いた時点が、計測手段11の計測開始条件となり、計測手段11がエレベータのドアが開く状態に応じて計測を開始する。
【0034】
ステップST102に於いて、計測手段11は、予め決められた所定の計測終了条件が満たされると、その計測を終了する。この計測手段11の計測終了条件としては、計測手段11が一般的な閉空間用の場合には、例えば予め決められた所定の時刻がある。又は、計測終了条件として、計測開始時刻からの予め決められた所定の経過時間としても良い。本実施の形態の例では閉空間はエレベータであるので、エレベータのドアが閉まる時点が計測終了条件となり、エレベータのドアが閉まるタイミングに応じて、計測手段11はその計測を終了する。
【0035】
ステップST103に於いて、乗降人数推定手段12は、計測手段11の計測結果を計測手段11から受信し、エレベータ(閉空間の一例)内への乗車人数、エレベータ(閉空間)内からの降車人数を推定する。例えば、計測手段11が重量センサであるときには、計測手段11から得られる計測結果は積載重量となり、乗降人数推定手段12は、既述した特許文献1の方法で以って、乗車人数及び降車人数を推定しても良い。又は、計測手段11が複数の光電センサから成るときには、当該計測手段11から得られる計測結果は光電センサの感知結果であるので、乗降人数推定手段12は、既述した特許文献4の方法を用いて、乗車人数及び降車人数を推定することとしても良い。或いは、計測手段11がエレベータ内への乗客の乗車を撮影し得る撮像カメラ及びエレベータ内からの乗客の降車を撮影し得る撮像カメラから成るときには、各撮像カメラが撮影した画像データから、乗降人数推定手段12は、エレベータ内への乗車人数及びエレベータ内からの降車人数を推定する。
【0036】
ステップST104に於いて、乗客有無推定手段13は、計測手段11の計測結果を計測手段11から受信し、エレベータ内の乗客の有無を推定する。
【0037】
ステップST104に於ける、乗客有無推定手段13が乗客有無を推定する方法の一例(この方法を乗客有無推定方法(一)と定義する。)について、以下に詳述する。例えば、図3は、計測手段11が重量センサであるときに、計測手段11によって計測されたエレベータの積載重量の時系列変化を示す図であり、横軸は時刻t(i)を示し、縦軸は時刻t(i)に計測された積載重量W(i)(デジタル値)を示している。ここで、iは計測手段11のサンプリング番号であり、t(i)−t(i−1)は、計測手段11のサンプリング周期となる。積載重量W(i)の内で、サンプリング番号iが最も大きな値のときの積載重量W(i)を、即ち、最後に計測された積載重量W(i)をW(i_max)と定義すると、ステップST104に於いて、乗客有無推定手段13は、計測手段11から積載重量W(i_max)を受信する。そして、乗客有無推定手段13は、積載重量W(i_max)が、同手段13内に予め保持している所定の閾値W_judge以下であった場合には、エレベータ内に乗客はいない(無)と推定する。他方、積載重量W(i_max)が閾値W_judgeよりも大きな値であった場合には、乗客有無推定手段13は、エレベータ内には乗客がいる(有)と推定する。
【0038】
ステップST105に於いて、在場人数推定手段14は、乗降人数推定手段12から乗車人数及び降車人数の推定値のデータを、乗客有無推定手段13から乗客有無推定結果のデータを受信する。そして、乗客有無の推定結果が“無”である場合には、在場人数推定手段14は、エレベータの戸閉後の在場人数を0人とする。即ち、在場人数推定手段14は、エレベータの戸閉後の在場人数を0人にリセットする。このリセットにより、仮に過去の乗車人数及び降車人数の誤検知によってエレベータの戸閉後の在場人数の検知精度が劣化していても、当該リセット処理によって、過去のデータは無くなることとなるので、戸閉後の在場人数の検知精度の劣化は是正されることとなる。そして、在場人数推定手段14は、リセット後の戸閉後の在場人数(0人)を、次回の戸開前在場人数として保有する。
【0039】
これに対して、乗客有無の推定結果が“有”である場合には、在場人数推定手段14は、エレベータの戸閉後の在場人数を、下記の式(1)に基づいて求める。
【0040】
【数1】
【0041】
この場合、求められた戸閉後在場人数は、次回の戸開前在場人数として利用される。
【0042】
尚、図2に於いては、ステップST104及びST105に於いて乗客有無推定及び在場人数推定を行っているが、乗客有無推定及び在場人数推定の動作順序は特に限定されるものではない。即ち、計測開始後から計測終了までの期間(エレベータのドアが開いて閉まるまでの期間)中に、計測手段11によりサンプリング周期毎に計測される最新データを基にして、人数検知装置1は、常に、乗客有無推定及びそれに引き続く在場人数推定をダイナミックに行い続けても良い(この方法を乗客有無推定方法(二)と定義する。)。この場合、在場人数推定手段14は、乗客有無推定手段13が計測期間中に最後に“無”と推定した後以降に於いて、乗降人数推定手段12により推定された乗車人数及び降車人数を利用して、式(1)に基づきエレベータの戸閉後の在場人数を推定すれば良い。
【0043】
又、乗客有無推定手段13に於いて、閾値W_judgeと比較される積載重量は、特定期間の平均値であっても良い。これにより、エレベータ内の乗客の振動により、微増減する積載重量によって乗客有無推定結果を誤る可能性が低くなる。
【0044】
又、計測手段11から得られる計測結果が光電センサの感知結果であるときには、乗客有無推定手段13は、特許文献5に記載された様な方法で在場人数を推定し、その在場人数結果から乗客有無を推定することとしても良い。
【0045】
尚、本実施の形態で記載した人数検知装置1は、その用途例として、例えば、“共連れ”という現象を検知・防止するシステムに利用可能である。ここで、“共連れ”とは、例えば、入退室管理システムに於いて、認証者によってドアが開き、認証者が入場中に非認証者も入場できてしまうという物理セキュリティホールである。この“共連れ”を検知するためには、“認証者の数”と“実際に入場した人数”とを比較する必要があり、“実際に入場した人数”、即ち、本実施の形態1に於ける「乗車人数」を検知するための装置として、本実施の形態の人数検知装置1(特に、乗降人数推定手段12及び在場人数推定手段14)を利用することが出来る。
【0046】
以上の様に、本実施の形態によれば、“エレベータに人が乗車するときには元々のエレベータ内には人がいない”と言う条件下でなくとも、乗車人数を推定出来ると言う効果が得られる。
【0047】
又、求めた乗車人数と降車人数との加減算によって在場人数を求める場合には、過去の乗車人数及び降車人数の誤検知によって在場人数の検知精度が劣化するという課題があった。しかしながら、本実施の形態によれば、乗車人数及び降車人数を推定する乗降人数推定手段12とは別個に乗客有無推定手段13を設けて、乗客有無推定手段13の推定結果が“無”の場合には在場人数推定手段14は閉空間内の戸閉後在場人数を0値にリセットしてしまうので、過去の、乗車人数及び降車人数の誤推定に影響に受けずに、在場人数を推定することも可能となる。このため、在場人数の検知精度が改善され、在場人数を精度良く推定することが出来ると言う効果がある。
【0048】
又、特許文献2の様に、積載重量を平均体重値で割った値を在場人数とする場合には、実際の乗客の重量と平均体重との差により在場人数の検知精度が劣化すると言う課題があった。しかしながら、本実施の形態によれば、数1の式(1)に示される様に、乗車人数と降車人数とから在場人数を算出しているので、実際の乗客の重量と平均体重との差では、在場人数の検知精度は劣化しないと言う効果がある。
【0049】
尚、本実施の形態では、計測手段11として、主として既設のエレベータの重量センサや光電センサや監視カメラを用いているが、既設のエレベータの重量センサや光電センサや監視カメラでなくとも良い。即ち、出入口の確保された閉空間に於いて、その閉空間の積載重量を計測できる人数検知装置1専用の重量センサや、閉空間の出入り口を通過する人を感知する光電センサや、その閉空間や閉空間の出入り口を撮影する人数検知装置1専用のカメラを、計測手段11として用いても、本実施の形態の方法により、閉空間への入場人数(エレベータへの乗車人数)、退場人数(エレベータからの降車人数)及び在場人数を推定することが出来る。とは言え、既設のエレベータの重量センサや、光電センサや、監視カメラを計測手段11として活用することは、人数検知装置1の導入コストを低減することが出来るという利点を奏する。
【0050】
(実施の形態2)
実施の形態1では、計測手段11を特定することなく、乗車人数と降車人数と乗客有無結果とから、エレベータの戸閉後在場人数を推定している。
【0051】
しかし、例えば、乗車人数、降車人数、及び乗客有無を推定するための各計測手段を、それぞれ、重量センサ、光電センサ、及び監視カメラに担わせると言う様に別々に設定してしまうと、人数検知装置1の導入コストが増加してしまう。
【0052】
そこで、本実施の形態では、重量センサのみで以って、乗車人数、降車人数、及び在場人数を精度良く推定する方法について示す。
【0053】
図4は、この発明の実施の形態2に係る人数検知装置1の構成を示すブロック図である。図4に示す様に、人数検知装置1は、計測手段11、時間差分データ作成手段15、波形観測手段16、乗客有無推定手段13及び在場人数推定手段14を備える。そして、本実施の形態では、時間差分データ作成手段15及び波形観測手段16により、実施の形態1の乗降人数推定手段12に対応する「乗降人数推定手段」が構成されている点に、その特徴点がある。そして、計測手段11は、エレベータに配設されている重量センサである。その他の各手段13〜16は、マイクロコンピュータ上のソフトウェアによって構成されている。
【0054】
計測手段11は、既述の通りエレベータの重量センサより成り、エレベータのドアが開いた後、当該ドアが閉められるまでの期間内に、予め決められた所定のサンプリング周期でエレベータの積載重量を計測する。
【0055】
時間差分データ作成手段15は、計測手段11により計測された積載重量の差分間隔毎の変化を演算して、時間差分データを作成する。
【0056】
波形観測手段16は、時間差分データ作成手段15により作成された時間差分データの時系列変化と、その保有する標準モデルの時間差分データの時系列変化又は所定の閾値とを比較して、エレベータに乗車する乗車人数、及び、エレベータから降車する降車人数を推定する。
【0057】
乗客有無推定手段13は、計測手段11により計測された積載重量を、その保有する所定の閾値と比較して、エレベータ内の乗客有無を推定する。
【0058】
在場人数推定手段14は、波形観測手段16による乗車/降車人数の推定結果と、乗客有無推定手段13による乗客有無推定結果とを基に、実施の形態1で記載した方法と同一の方法によって、在場人数を推定する。
【0059】
ここで、図5は、エレベータの積載重量の時系列変化を示す図であり、その横軸は時刻t(i)を示し、その縦軸は時刻t(i)に計測された積載重量W(i)を示している。図5(a)はエレベータに2人が連続乗車したときの積載重量の時系列変化を示しており、エレベータがある階に停止してドアが開いた後に2人が順次に連続乗車した場合には、1人目が乗車したことによる重量変化と、2人目が乗車したことによる重量変化との間隔が短い。そのため、図5(a)が示す積載重量W(i)の波形は、2人が連続乗車したときの波形ではあるが、はっきりとした区切れが表れてはいない波形となっている。
【0060】
このとき、既述した特許文献1に記載の先行技術では、積載重量の変化の方向と回数とからエレベータの乗車人数及び降車人数を算出しているので、図5(a)に示す積載重量W(i)の波形を図5(b)又は図5(c)に示す様に、直線的で階段状に変化を示す波形へと濾波しなければならない。しかし、図5(b)と図5(c)とでは推定される人数に違いが生じるため、特許文献1の先行技術では正確に波形を濾波しなければならない。図5(a)の場合は、2人が連続乗車したときの積載重量の時系列変化であるため、図5(c)へ濾波することが正解となるが、1人が乗車した場合であっても、積載重量の波形が図5(a)に示す様な区切れの無い積載重量の波形となる可能性があるため、場合によっては、図5(b)へと濾波することが正解となることもある。この様に、特許文献1に記載の方法では、乗車人数及び降車人数を推定するために正確に積載重量を濾波することは困難となる。従って、本実施の形態では、特許文献1に記載の方法を用いて乗車人数及び降車人数を推定することはしないこととする。
【0061】
そこで、本実施の形態では、図4に示す構成により、所定のサンプリング周期で計測された積載重量の差分間隔毎の変化を演算して時間差分データを作成し、作成された時間差分データの時系列変化と標準モデルの時系列変化又は所定の閾値とを比較して、乗車人数及び降車人数を推定している。
【0062】
次に、図4の人数検知装置1の動作について記載する。
【0063】
ここで、図6は、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0064】
ステップST201に於いて、計測手段11は、予め決められた所定の計測開始条件が満たされると、計測を開始する。この計測手段11の計測開始条件としては、例えば予め決められた所定の時刻がある。本例では、閉空間はエレベータであるので、エレベータがある階に停止して、そのドアが開いた時点に応じて、計測手段11たる重量センサは、積載重量の計測を開始する。
【0065】
ステップST202に於いて、計測手段11は、所定のサンプリング周期で、エレベータの積載重量W(i)を計測する。
【0066】
ステップST203に於いて、計測手段11は、予め決められた所定の計測終了条件が満たされると、その計測を終了する。この計測手段11の計測終了条件としては、例えば予め決められた所定の時刻がある。又、計測終了条件として、計測開始時刻からの予め決められた所定の経過時間としても良い。本例では、閉空間はエレベータであるので、そのドアが閉じた時点に応じて、計測手段11たる重量センサは、積載重量の計測を終了する。
【0067】
ステップST204に於いて、時間差分データ作成手段15は、計測手段11から計測終了信号を受けて、計測開始から計測終了までの間に計測手段11により計測された積載重量W(i)のデータを計測手段11から受信する。
【0068】
ここで、既述した図3は、時間差分データ作成手段15が計測手段11より受信する積載重量W(i)の時系列変化の一例を示す図であり、ここでは、エレベータに2人が乗車した後に、2人が降車したときのグラフの一例を示している。
【0069】
そして、図6のステップST204に於いて、時間差分データ作成手段15は、受信した積載重量W(i)のデータから、次の式(2)を利用して、積載重量W(i)の差分間隔毎の変化を演算して時間差分データW_diff(i)を作成する。
【0070】
【数2】
【0071】
図7は、時間差分データ作成手段15により作成された時間差分データW_diff(i)の時系列変化の一例を示す図である。図7に於いて、横軸は時刻t(i)を示し、縦軸は時間差分データW_diff(i)を示している。図7に於いて、上方向に凸の波形は、積載重量が増加したことを意味し、エレベータ内に人が乗車したことを意味する。逆に、下方向に凸の波形は、積載重量が減少したことを意味し、エレベータ内から人が降車したことを意味する。図7に示す閾値A〜Fについては、後述する。
【0072】
図8は、1人が乗車したときのエレベータの積載重量から作成された標準モデルの時間差分データW_m(i)の時系列変化を示す図である。尚、同データW_m(i)は、波形観測手段16によって保有されている。
【0073】
次に、図6のステップST205に於いて、波形観測手段16は、時間差分データ作成手段15により作成された時間差分データW_diff(i)を受信する。波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が上方向に凸の波形となっている場合には、例えば図8に示す様な、予め波形観測手段16内に保持している第1標準モデルの時間差分データW_m(i)の時系列変化と、受信した時間差分データW_diff(i)の時系列変化との類似度を表す次の式(3)に示す正規化相互相関関数z(τ)(第1正規化相互相関関数)を、演算する。
【0074】
【数3】
【0075】
ここで、τは基準となる時刻t(i)からのずれ量を示し、バーW_mは標準モデルの時間差分データW_m(i)の平均を示し、バーW_diffは受信した時間差分データW_diff(i)の平均を示す。基準となる時刻t(i)としては、例えば、当該階での戸開開始時刻若しくは戸閉完了時刻等がある。
【0076】
そして、ステップST205に於いて、波形観測手段16は、演算した正規化相互相関関数z(τ)の値が、波形観測手段16が予め保持している所定の閾値S_overlap以上となった回数を、「乗車人数」とする。
【0077】
他方で、波形観測手段16は、図8に示す(その値が0以上の)第1標準モデルの時間差分データW_m(i)の各値の符号を反転して成る、第2標準モデルの時間差分データW_m(i)をも、保持している。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が下方向に凸の波形となっている場合には、第2標準モデルの時間差分データW_m(i)の時系列変化と、受信した時間差分データW_diff(i)の時系列変化との類似度を表す上記の式(3)に示す正規化相互相関関数z(τ)(第2正規化相互相関関数)を演算する。そして、波形観測手段16は、演算した相互相関関数z(τ)の値が予め保持している所定の閾値S_overlap以上となった回数を、「降車人数」とする。
【0078】
尚、波形観測手段16は、第1標準モデルの時間差分データW_m(i)の値と、それを負の値に変更した第2標準モデルの時間差分データW_m(i)の値の何れか一方だけを保持しても良い。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が上方向及び下方向の内の何れの方向に凸の波形となっているかを判断し、保持している標準モデルの時間差分データW_m(i)の値の符号を変換した後で、上記の式(3)に示す正規化相互相間関数z(τ)を演算しても良い。こうすることで、標準モデルの時間差分データを保持する記憶領域を少なくすることが出来、演算リソースを効率的に利用する事が可能となる。
【0079】
波形観測手段16が上記の様に標準モデルの時間差分データW_m(i)を使用して乗車人数及び降車人数を推定する方法を、人数推定方法(一)と定義する。
【0080】
ステップST206では、乗客有無推定手段13は、実施の形態1で記載した乗客有無推定方法と同一の方法(乗客有無推定方法(一)又は乗客有無推定方法(二))により、乗客有無を推定する。
【0081】
更に、ステップST207では、在場人数推定手段14は、波形観測手段16から乗車人数及び降車人数を受信する。更に、在場人数推定手段14は、乗客有無推定手段13からも、乗客有無の推定結果を受信する。そして、在場人数推定手段14は、実施の形態1のステップST105の動作と同様の動作によって、在場人数を推定する。
【0082】
以上より、計測手段11を重量センサのみで構成することが出来、積載重量の変化が直線的な階段状の変化でなくとも、乗降人数を検知することが出来る。
【0083】
<変形例1:人数推定方法(二)>
図6のステップST205に於いて、波形観測手段16は、上記の人数推定方法(一)とは異なる次の人数推定方法(二)で以って、乗車人数と降車人数とを推定しても良い。
【0084】
即ち、波形観測手段16は、時間差分データW_diff(i)に対して、正の値である第1閾値を設定している。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の0以上の値に対して、所定の位置に第1閾値を設定し、時間差分データW_diff(i)の時系列変化が設定した第1閾値以上になった回数(換言すれば、時間差分データW_diff(i)が上記閾値を上方向に又は下方向の何れか一方に跨いだ回数。)を、「乗車人数」とする。
【0085】
例えば、図7のCの位置に第1閾値を設定した場合には、時間差分データW_diff(i)の時系列変化が閾値C以上になった回数は2回であり、波形観測手段16は乗車人数を2人と推定する。
【0086】
他方、波形観測手段16は、時間差分データW_diff(i)に対して、負の値である第2閾値を設定している。ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の時系列変化が設定した第2閾値以下になった回数(換言すれば、時間差分データW_diff(i)が上記閾値を上方向又は下方向の何れか一方に跨いだ回数。)を、「降車人数」とする。
【0087】
尚、第1閾値と第2閾値との絶対値が同じ場合には、波形観測手段16が保持する閾値は、第1閾値及び第2閾値のどちらか一方でも良い。時間差分データW_diff(i)の値の符号と、閾値の符号とが、反対の場合には、閾値の符号又は時間差分データW_diff(i)の符号の何れか一方を反転させて、両者を比較すれば、同等の結果が得られる。こうすることで、保持するデータの記憶領域を少なくすることが出来、演算リソースを効率的に利用することが可能となる。
【0088】
この人数推定方法(二)は、上記の人数推定方法(一)の様にモデル波形W_m(i)を予め保持しておく必要性が無く、モデル波形W_m(i)との類似度を演算する必要性が無いので、使用する演算リソース量を少なくすることが出来ると言う利点を奏する。
【0089】
図9は、時間差分データ作成手段15により、図5(a)に示す連続乗車の場合の積載重量W(i)から作成された、時間差分データW_diff(i)の時系列変化の一例を示す図である。
【0090】
ステップST205に於いて、波形観測手段16は、図9に示す時間差分データW_diff(i)の正の値の位置、例えば図9のBの位置に第1閾値を設定した場合には、時間差分データW_diff(i)の時系列変化が第1閾値B以上になった回数は2回であり、乗車人数を2人と推定する。
【0091】
他方、乗客が連続降車した場合についても、波形観測手段16は、第2閾値を負の値に設定して、同様にして降車人数を推定することが出来る。
【0092】
この様に、連続乗車又は連続降車の場合でも、当該人数推定方法(二)により、乗車人数及び降車人数を推定することが出来る。
【0093】
以上より、本変形例によっても、計測手段11を重量センサのみで構成することが出来、積載重量の変化が階段状の変化でなくとも、乗降人数を検知することが出来る。
【0094】
<変形例2:人数推定方法(三)>
或いは、ステップST205に於いて、波形観測手段16は、上記の人数推定方法(一)及び上記の人数推定方法(二)とは異なる、次の人数推定方法(三)により、乗車人数及び降車人数を推定しても良い。
【0095】
即ち、ステップST205に於いて、波形観測手段16は、受信した時間差分データW_diff(i)の正の値に対して、所定の第1閾値を複数個設定する。そして、波形観測手段16は、時間差分データW_diff(i)の時系列変化が、設定した第1閾値以上になった回数(時間差分データW_diff(i)の時系列変化が設定した閾値を上方向又は下方向の何れか一方に跨いだ回数に相当。)を第1閾値毎にカウントする。そして、波形観測手段16は、第1閾値を跨いだ回数の出現数を数える。そして、波形観測手段16は、最も多い出現数の回数(時間差分データW_diff(i)の時系列変化が設定した第1閾値を上方向又は下方向の何れか一方に跨いだ回数。)を、「乗車人数」と推定する。
【0096】
他方で、波形観測手段16は、受信した時間差分データW_diff(i)の負の値に対して所定の第2閾値を複数個設定する。そして、波形観測手段16は、時間差分データW_diff(i)の時系列変化が、設定した第2閾値以下になった回数(時間差分データW_diff(i)の時系列変化が設定した第2閾値を上方向又は下方向の何れか一方に跨いだ回数に相当。)を、第2閾値毎にカウントする。そして、波形観測手段16は、同様に、第2閾値を跨いだ回数の出現数を数える。そして、波形観測手段16は、最も多い出現数の回数(時間差分データW_diff(i)の時系列変化が設定した第2閾値を上方向又は下方向の何れか一方に跨いだ回数。)を、「降車人数」と推定する。
【0097】
例えば、波形観測手段16は、図7に示す時間差分データW_diff(i)を受信した場合に、例えば閾値A,B,C,D,E,Fの様に、所定の第1閾値を複数個設定し、時間差分データW_diff(i)の時系列変化が、設定した第1閾値以上になった回数を、即ち、乗車人数の推定候補を、第1閾値毎にカウントする。
【0098】
例えば、図10は、図7に於いて、第1閾値A,B,C,D,E,Fを設定した場合に関して、時間差分データW_diff(i)の時系列変化が、第1閾値を跨ぐ回数(乗車人数の推定候補)を、第1閾値毎にカウントした上で、第1閾値を跨ぐ回数の出現数の結果を示す図である。図7に於いて、第1閾値Aを跨ぐのは1回(1人)、第1閾値Bを跨ぐのは2回(2人)、第1閾値Cを跨ぐのは2回(2人)、第1閾値Dを跨ぐのは2回(2人)、第1閾値Eを跨ぐのは3回(3人)、第1閾値Fを跨ぐのは2回(2人)である。それらの結果を踏まえて、各第1閾値を跨ぐ回数の出現数が、図10である。図10に示す様に、第1閾値を2回跨ぐので、即ち、乗車人数の推定候補2人の出現回数が、4であり最も多いので、波形観測手段16は、乗車人数を2人と推定する。
【0099】
一方、乗客が降車した場合にも、波形観測手段16は、図7に示す時間差分データW_diff(i)の負の値に関して、所定の第2閾値を複数個設定することにより、同様にして、降車人数を推定することが出来る。
【0100】
尚、各第1閾値の絶対値と各第2閾値の絶対値とが同じ場合には、波形観測手段16が保持する閾値は、第1閾値又は第2閾値の何れか一方でも良い。それに対して、時間差分データW_diff(i)の値の符号と、閾値の符号とが、反対の場合には、時間差分データW_diff(i)の値の符号又は閾値の符号のどちらか一方を反転させて両者を比較すれば、同等の効果が得られる。こうすることで、保持するデータの記憶領域を少なくすることが出来、演算リソースを効率的に利用することが可能となる。
【0101】
この人数推定方法(三)は、人数推定方法(一)よりも演算リソース量が少なく、且つ、人数推定方法(二)よりも精度良く乗車人数と降車人数とを推定することが出来る。
【0102】
又、波形観測手段16は、乗客が連続乗車した場合の図9に示す時間差分データW_diff(i)を受信した際には、例えば閾値A,B,C,D,E,Fの様に、所定の閾値を複数個設定し、時間差分データW_diff(i)の時系列変化が設定した閾値以上になった回数を、即ち、乗車人数の推定候補を閾値毎にカウントする。
【0103】
図9に於いて、閾値Aを超えるのは2回(2人)、閾値Bを超えるのは2回(2人)、閾値Cを超えるのは3回(3人)、閾値Dを超えるのは2回(2人)、閾値Eを超えるのは2回(2人)、閾値Fを超えるのは1回(1人)であり、各閾値を超える回数が同一である回数をカウントした結果は、図10に示すカウント結果となる。図10に示す様に、乗車人数の推定候補2人の出現数が4であり最も多いので、波形観測手段16は、乗車人数を2人と推定する。
【0104】
他方、乗客が連続降車した場合にも、波形観測手段16は、同様の方法により、降車人数を推定することが出来る。
【0105】
この様に、連続乗車又は連続降車でも、この人数推定方法(三)により、乗車人数及び降車人数を推定することが出来る。
【0106】
以上より、本変形例によっても、計測手段11を重量センサのみで構成することが出来、積載重量の変化が階段状の変化でなくとも、乗降人数を検知することが出来る。
【0107】
<実施の形態2の利点>
以上の様に、本実施の形態によれば、実施の形態1と同様の効果が得られると共に、計測手段11として重量センサのみで構成することが出来るため、人数検知装置1の導入コストを低減出来るという効果がある。
【0108】
又、本実施の形態によれば、時間差分データ作成手段15が計測手段11により所定のサンプリング周期で計測された積載重量の差分間隔毎の変化を演算して時間差分データを作成し、波形観測手段16が、時間差分データ作成手段15により作成された時間差分データの時系列変化と標準モデルの時系列変化又は所定の閾値とを比較して、乗車人数及び降車人数を推定する。そのため、この実施の形態2の人数推定方法によれば、特許文献1の様にエレベータの乗車人数及び降車人数を、積載重量の変化が階段状でなくとも、推定することが出来るという効果が得られる。
【0109】
又、本実施の形態によれば、乗客の連続乗車及び連続降車の場合にも、乗車人数及び降車人数を推定することが出来るという効果が得られる。
【0110】
又、本実施の形態の人数推定方法によれば、複数の計測機器を用いずに、乗車と降車とを区別して人数を検知出来るという効果が得られる。又、複数の計測機器からの複数の信号を処理しているわけではないので、複数の信号間の同期を考慮する必要性もなく、信号処理をシンプルに出来るという効果がある。
【0111】
(実施の形態3)
実施の形態1及び2では、乗車人数及び降車人数を推定するのは、計測手段11に於いて所定の計測終了条件が満たされた後である。このため、乗車人数及び降車人数は所定の計測終了条件が満たされた後にならないとわからず、乗客の乗車及び降車の直後に乗車人数及び降車人数をリアルタイムで推定することが出来ない。又、乗客の乗車及び降車の直後に乗車人数と降車人数とを推定出来ないので、乗客の乗車及び降車の直後に在場人数もリアルタイムで推定することが出来ない。そこで、本実施の形態では、乗客の乗車及び降車の直後に、乗車人数、降車人数及び在場人数を推定する方法について示す。
【0112】
図11は、本実施の形態に係る人数検知装置1の構成を示すブロック図である。人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、及び処理単位決定手段17を備える。或いは、乗降人数推定手段12の動作として、実施の形態2で記載した人数推定方法(一)、(二)及び(三)の何れかを適用する場合には、乗降人数推定手段12は、図11に示す様に、時間差分データ作成手段15と波形観測手段16とによって構成される。尚、本実施の形態に於いても、計測手段11を除いた各手段は、マイクロコンピュータ上のソフトウェアによって構成されている。
【0113】
図11に於いて、処理単位決定手段17は、計測手段11により計測されたデータを逐次的に受信し、乗車人数及び降車人数を推定する際の1回の処理単位分のデータが計測されたか否かを判断することにより、乗降人数推定手段12によって乗車人数及び降車人数を推定する際のデータの処理単位を動的に決定する。尚、計測手段11、乗降人数推定手段12、乗客有無推定手段13、及び在場人数推定手段14は、実施の形態1の図1に示す対応構成要素と同じである。又、乗降人数推定手段12に実施の形態2を適用する場合には、その構成要素である時間差分データ作成手段15及び波形観測手段16は、実施の形態2の図4に示す対応構成要素と同じである。
【0114】
次に、本実施の形態に係る人数検知装置1の動作について記載する。
【0115】
図12は、図11の乗降人数推定手段12が実施の形態1に係る図1の乗降人数推定手段12に該当する場合に於ける、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0116】
ステップST301に於いて、計測手段11は、所定の計測開始条件が満たされると、その計測を開始する。この計測手段11の計測開始条件としては、例えば所定の時刻がある。本例では、閉空間はエレベータであるため、エレベータがある階に停止してそのドアが開かれた時点が、計測手段11の計測開始条件となる。
【0117】
ステップST302に於いて、計測手段11は計測する。
【0118】
ステップST303に於いて、計測手段11は、所定の計測終了条件が満たされたか否かを判断する。ステップST303で、所定の計測終了条件が満たされていない場合には、人数検知装置1はステップST304に進む。又、ステップST303に於いて、所定の計測終了条件が満たされた場合には、計測手段11は計測を終了し、人数検知装置1はステップST306に進む。計測手段11の計測終了条件としては、例えば所定の時刻がある。また、計測終了条件として、計測開始からの所定の経過時間としても良い。本例では、閉空間はエレベータであるので、エレベータのドアが閉まった時点が、計測終了条件となる。
【0119】
ステップST304に於いて、処理単位決定手段17は、計測手段11により計測されたデータを逐次的に受信し、乗降人数推定手段12により乗車人数及び降車人数を推定する際の1回の処理単位分のデータが計測されたか否かを判断する。
【0120】
ステップST304にて、処理単位決定手段17が、乗車人数及び降車人数を推定する際の1回の処理単位分のデータが計測されたと判断すると、ステップST305に於いて、乗降人数推定手段12は、処理単位決定手段17から、乗車人数及び降車人数を推定する際の1回の処理単位分のデータを受信し、実施の形態1に既述した方法により乗車人数及び降車人数を推定する。
【0121】
尚、本実施の形態では、乗降人数推定手段12が乗車人数及び降車人数の推定を行っている間は、いまだ計測手段11の計測期間中である。このため、当該計測期間中に最終的に何人が乗車し、何人が降車したのかは、計測手段11が計測を終了するまでは決定出来ない。ステップST305に於いて推定された乗車人数及び降車人数は、その時点での乗降動作で乗車及び降車した人数であり、計測期間中を通した乗車人数及び降車人数とは別である。そこで、両者を区別するために、前者を「暫定乗車人数」及び「暫定降車人数」と、後者をこれまで通り「乗車人数」及び「降車人数」と、それぞれ定義する。又、乗車人数及び降車人数の各々の初期値は0人とする。同様に、計測期間中の在場人数と、計測終了後の在場人数とは別概念である。そこで、前者を「暫定在場人数」と、後者をこれまで通り「戸閉後在場人数」と定義する。又、暫定在場人数の初期値は、戸開前在場人数とする。
【0122】
そして、乗降人数推定手段12は、前回の処理単位に於ける乗車人数、降車人数及び暫定在場人数を用いて、自らが推定した暫定乗車人数及び暫定降車人数から、数4の各式(4)〜(6)により、エレベータの乗車人数、降車人数及び暫定在場人数を求める。
【0123】
【数4】
【0124】
ステップST303に於いて、計測終了条件が満たされると、ステップST306に於いて、乗客有無検知手段13は、計測期間中に計測した、乗客有無の推定に必要なデータを、計測手段11から受信し、実施の形態1に於いて記載した乗客有無推定方法(一)及び(二)の内で何れかの方法により、乗客有無を推定する。
【0125】
ステップST307に於いて、在場人数推定手段14は、乗降人数推定手段12から暫定在場人数を受信する。加えて、在場人数推定手段14は、乗客有無推定手段14から乗客有無の推定結果を受信する。そして、乗客有無の推定結果が“無”である場合には、在場人数推定手段14は、エレベータの戸閉後の在場人数を0人にリセットする。逆に、乗客有無の推定結果が“有”である場合には、在場人数推定手段14は、乗降人数推定手段12により受信した計測終了時点での上記式(6)で求められた最終的な暫定在場人数を、エレベータの戸閉後在場人数に設定する。
【0126】
尚、図12では、乗客有無検知手段13は、ステップST303に於いて計測が終了してから、ステップST306でのみ乗客の有無を推定する様にしているが、乗客有無検知手段13は、計測期間中に、乗客有無の推定に必要なデータを、計測手段11から計測期間中、逐次的に受信して、実施の形態1に於いて記載した乗客有無推定方法(一)及び(二)の内の何れかの方法により、常に乗客の有無を推定していても良い。この場合に於いて、乗客有無の推定結果が“無”であるときには、乗降人数推定手段12は、暫定在場人数を0人にリセットする。
【0127】
次に、乗降人数推定手段12が、実施の形態2の様に、時間差分データ作成手段15と波形観測手段16とによって構成されている場合の、人数検知装置1の動作について記載する。図13は、その場合に於ける人数検知装置1の動作を示すフローチャートである。
【0128】
図13に於いて、ステップST401の動作は、図12に示すステップST301の動作と同一のため、ここでの説明を省略する。
【0129】
ステップST402において、計測手段(重量センサ)11は、所定のサンプリング周期で、エレベータの積載重量W(i)を計測する。
【0130】
ステップST403の動作は、図12に示すステップST303の動作と同一のため、ここでの説明を割愛する。
【0131】
ステップST404に於いて、時間差分データ作成手段15は、計測手段11により計測された積載重量を逐次的に受信し、上記の式(2)を利用して、時間差分データW_diff(i)を逐次的に作成する。
【0132】
ステップST405に於いて、処理単位決定手段17は、時間差分データ作成手段15により作成された時間差分データW_diff(i)を逐次的に受信し、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたか否かを判断する。
【0133】
ここで、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたか否かを、処理単位決定手段17が判断する際の方法を示す。
【0134】
図14は、時間差分データ作成手段15により作成された時間差分データW_diff(i)の時系列変化の一例を示す図である。乗客がエレベータから乗車する場合には、図14に示す様に、時刻t(i)に時間差分データW_diff(i)が0より大きな値を示してから、時刻t(i+x)に時間差分データW_diff(i)が再び0の値を示す。他方、乗客がエレベータから降車する場合には、時刻t(i)に於いて時間差分データW_diff(i)は0より小さな値を示してから、時刻t(i+x)に時間差分データW_diff(i)が再び0の値を示す。このことから、処理単位決定手段17は、例えば、時間差分データW_diff(i)が0よりも大きな値を示してから、再び0の値を示す時刻t(i+x)に於いて、波形観測手段16が乗車人数及び降車人数を推定するための1回の処理単位分の時間差分データW_diff(i)が作成されたものと、判断する。このときの波形観測手段16が乗車人数及び降車人数を推定するための1回の処理単位分の時間差分データW_diff(i)とは、時刻t(i−1)〜時刻t(i+x)までの時間差分データである。
【0135】
図13のステップST405に於いて、処理単位決定手段17が、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたと判断出来る迄、人数検知装置1は、ステップST402〜ステップST404の動作を繰り返す。
【0136】
ステップST405に於いて、処理単位決定手段17が、波形観測手段16により乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)が作成されたものと判断すると、ステップST406に進む。ステップST406に於いて、波形観測手段16は、時間差分データ作成手段15又は処理単位決定手段17から、乗車人数及び降車人数を推定する際の1回の処理単位分の時間差分データW_diff(i)を受信し、実施の形態2に於いて記載した人数推定方法(一)、(二)、(三)の何れかの方法により、暫定乗車人数及び暫定降車人数を推定する。その上で、波形観測手段16は、既述した式(4)、(5)、(6)に基づいて、エレベータの乗車/降車/暫定在場人数を求める。
【0137】
ステップST403に於いて計測終了条件が満たされると、ステップST407に於いて、乗客有無検知手段13は、計測手段11又は時間差分データ作成手段15から、積載重量W(i)を受信し、実施の形態1に於いて既述した乗客有無推定方法(一)及び(二)の何れかの方法により、乗客有無を推定する。
【0138】
図13に於いて、ステップST408の動作は、図12に示すステップST307の動作と同一のため、ここでの説明を割愛する。
【0139】
尚、図13では、乗客有無検知手段13は、ステップST403に於いて計測が終了してから、ステップST407でのみ乗客の有無を推定する様にしているが、乗客有無検知手段13は、計測期間中に、乗客有無の推定に必要なデータを、計測手段11から計測期間中、逐次的に受信して、実施の形態1に於いて記載した乗客有無推定方法(一)及び(二)の内の何れかの方法により、常に乗客の有無を推定していても良い。この場合に於いて、乗客有無の推定結果が“無”であるときには、乗降人数推定手段12は、暫定在場人数を0人にリセットする。
【0140】
尚、本実施の形態では、図11に示す様に、処理単位決定手段17を独立の構成要素として示しているが、乗降人数推定手段12又は、時間差分データ作成手段15又は波形観測手段16の一方が、既述した処理単位決定手段17の機能を有する構成としても良い。
【0141】
以上の様に、本実施の形態によれば、実施の形態1及び2と同様の効果が得られると共に、乗車人数及び降車人数を推定する際のデータの処理単位を動的に決定することにより、乗客の乗車及び降車の直後に、エレベータの乗車人数及び降車人数を推定することが出来るという効果が得られる。
【0142】
加えて、本実施の形態によれば、乗客の乗車及び降車の直後に、エレベータの乗車人数及び降車人数を推定することが出来るので、乗客の乗車及び降車の直後に於けるエレベータ内の在場人数(暫定在場人数)をも推定することが出来るという効果が、得られる。
【0143】
(実施の形態4)
既述した特許文献3及び4では、ドア付近に設置された光電センサによって乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にドアを通過すると、乗車人数と降車人数とを精度良く推定することが難しくなる。
【0144】
又、実施の形態2では、積載重量W(i)とその時間差分データW_diff(i)とによって乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にエレベータに乗車すると、図15(a)に示す様な積載重量W(i)の時系列変化と、図15(b)に示す様な時間差分データW_diff(i)の時系列変化が得られる場合がある。この様な場合には、実施の形態2に於いて既述した波形観測手段16による人数推定方法(一)、(二)及び(三)の何れかを用いて乗客が2人であると判定することが難しくなる。
【0145】
そこで、以上の問題点に鑑みて、本実施の形態では、乗車人数及び降車人数の推定精度を更に向上させる方法について記載する。
【0146】
図16は、本実施の形態に係る人数検知装置1の構成を示すブロック図である。この人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14及びドア制御手段18を備える。又、乗降人数推定手段12に於ける人数推定方法として実施の形態2で述べた人数推定方法(一)、(二)及び(三)の何れかを利用する場合には、乗降人数推定手段12は、時間差分データ作成手段15と波形観測手段16とによって構成される。図16に於いても、計測手段11を除いて、その他の各手段はマイクロコンピュータ上のソフトウェアによって構成されている。
【0147】
図16に於いて、ドア制御手段18は、計測手段11が乗客の乗降を計測する際に、乗客が1人ずつエレベータの出入口を通過する様に、エレベータのドアの開き方を制御する。尚、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、時間差分データ作成手段15及び波形観測手段16は、実施の形態1の図1又は実施の形態2の図4に示す対応構成要素と同一である。
【0148】
次に、本実施の形態に係る人数検知装置1の動作について記載する。ここで、図17は、当該人数検知装置1の動作を示すフローチャートである。図17の場合では、乗降人数推定手段12は、実施の形態1に係る図1の乗降人数推定手段12に相当する。
【0149】
ステップST501に於いて、計測手段11は、所定の計測開始条件が満たされると、その計測を開始する。計測手段11の計測開始条件としては、例えば所定の時刻がある。本例では、閉空間はエレベータであるので、計測開始条件は、エレベータがある階に停止してそのドアを開ける動作を開始する時点に相当する。
【0150】
ステップST502に於いて、ドア制御手段18は、エレベータのドアを開ける。ここで、図18は、ドア制御手段18によるエレベータのドアの開き方の制御を示す図である。ステップST502に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(a)に示す様に、乗客が1人ずつしか通過出来ない幅Wnまでしかドアが開かない様に、ドアの開き方を制御する。或いは、ドア制御手段18は、ドアを開く際に、図18(b)に示す様に、乗客が1人ずつしか通過出来ない様にするための遮蔽物を出現させることとしても良い。乗客が1人ずつしか通過できない幅Wnのデータは、予めドア制御手段18によって保持されているものとする。この様なドアの制御方法を、ドア制御方法(一)と定義する。
【0151】
図17のステップST503に於いて、計測手段11は計測する。
【0152】
ステップST504に於いて、計測手段11は、所定の計測終了条件が満たされると、計測を終了する。計測手段11の計測終了条件としては、例えば所定の時刻がある。又、計測終了条件として、計測開始からの所定の経過時間としても良い。
【0153】
ステップST505に於いて、ドア制御手段18は、エレベータのドアを閉める。
【0154】
図17に於いて、以降の各ステップST506〜ステップST508の動作は、それぞれ、実施の形態1の図2に示すステップST103〜ステップST105の動作と同一のため、ここでの説明を省略する。
【0155】
次に、実施の形態2の図4の乗降人数推定手段12と同様に、図16の乗降人数推定手段12が、時間差分データ作成手段15と波形観測手段16とによって構成される場合の、人数検知装置1の動作について説明する。ここで、図19は、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0156】
図19に於いて、ステップST601及びステップST602の動作は、それぞれ、図17に示すステップST501及びステップST502の動作と同一のため、ここでの説明を省略する。
【0157】
ステップST603に於いて、計測手段11は、所定のサンプリング周期で、エレベータの積載重量W(i)を計測する。
【0158】
図19に於いて、ステップST604及びステップST605の動作は、それぞれ、図17に示すステップST504及びステップST505の動作と同一のため、ここでの説明を省略する。
【0159】
図19に於いて、ステップST606〜ステップST609の動作は、それぞれ、実施の形態2の図6のステップST204〜ステップST207の動作と同一のため、ここでの説明を省略する。
【0160】
尚、ステップST501又はステップST601に於ける計測手段11の計測開始条件として、ドアの戸開信号を使用しても良い。この場合、ステップST502又はステップST602の戸開動作と、ステップST501又はステップST601の計測開始動作との順番は入れ替わる。そして、順番が入れ替わったステップST501又はステップST601では、計測手段11は、ドア制御手段18から戸開信号を受信して、その計測を開始する。
【0161】
又、ステップST504又はステップST604における計測手段11の計測終了条件として、ドアの戸閉信号を使用しても良い。この場合、ステップST505又はステップST605の戸閉動作と、ステップST504又はステップST604の計測終了動作との順番は入れ替わる。そして、順番が入れ替わったステップST504又はステップST604では、計測手段11は、ドア制御手段18から戸閉信号を受信して、その計測を終了する。
【0162】
又、ステップST502又はステップST602に於いて、ドア制御手段18は、ドア制御方法(一)とは異なる、次のドア制御方法(二)で以って、ドアの開き方を制御しても良い。即ち、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(a)に示す様に、乗客が1人ずつしか通過できない幅まで通常の速度(速度A)で開け、その後、通常の速度よりも遅い速度(速度B)でドアを全開まで開く様に、ドアの開き方を制御する。又、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(b)に示す様に、乗客が1人ずつしか通過できない幅となる様に遮蔽物を通常の速度(速度A)で出現させ、その後は、通常の速度よりも遅い速度(速度B)で遮蔽物を撤収させる様に遮蔽物を制御する。速度Aと速度Bとは、予めドア制御手段18によって決められているものとする。
【0163】
1人ずつしか通過出来ない幅までしかドアが開かないと、大きな荷物を抱えている等の理由でドアを通過することが出来なかった人も、ドア制御方法(二)では、時間経過後にドアを通過することが出来る様になる。
【0164】
又、ステップST502又はステップST602に於いて、ドア制御手段18が、ドア制御方法(二)によってドアの開き方を制御している場合に、ドア近くにあるドア開登録手段を操作すると、ドア制御手段18は、速度Bよりも速い速度で、ドアが全開まで開く様にドアを制御する、或いは、速度Bよりも速い速度で遮蔽物を撤収する様に遮蔽物を制御しても良い。ここで、「ドア開登録手段」とは、例えば、エレベータの戸開ボタンである。
【0165】
この様な制御により、ドアが全開するまで待つことなく、乗客はエレベータのドアを通過することが出来る様になる。
【0166】
又、ステップST502又はステップST602に於いて、ドア制御手段18が、ドア制御方法(二)によってドアの開き方を制御している場合に、乗客がドア近くにあるドア閉登録手段を操作すると、ドア制御手段18は、ドアが反転して閉まる様にドアを制御する、或いは、遮蔽物を出現させて通過出来なくなる様に遮蔽物を制御しても良い。ここで、「ドア閉登録手段」とは、例えば、エレベータの戸閉ボタンである。
【0167】
これにより、外気が寒い等の理由でドアを早く閉めたり、或いは、遮蔽物で外気を早く遮断したりすることが出来る。又、ドアを早く閉めて、エレベータを早く出発させることが可能となる。
【0168】
又、ステップST502又はステップST602に於いて、ドア制御手段18は、ドア制御方法(一)及び(二)とは異なる、次のドア制御方法(三)で以ってドアの開き方を制御しても良い。即ち、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(a)に示す様に、乗客が1人ずつしか通過出来ない幅まで開け、一定時間の経過後にドアを全開まで開ける。又、ステップST502又はステップST602に於いて、ドア制御手段18は、エレベータのドアを開くときに、図18(b)に示す様に、乗客が1人ずつしか通過出来ない幅となる様に遮蔽物を出現させ、一定時間の経過後に遮蔽物を撤収させる様にドアの開き方を制御する。
【0169】
1人ずつしか通過出来ない幅までしかドアが開かないと、大きな荷物を抱えている等の理由で、ドアを通過することが出来なかった人も、ドア制御方法(三)では、一定時間の経過後にドアを通過することが出来る様になる。
【0170】
又、ステップST502又はステップST602に於いて、ドア制御手段18がドア制御方法(三)によってドアの開き方を制御している場合に、乗客がドア近くにあるドア開登録手段を操作すると、ドア制御手段18は、直ぐにドアが全開まで開く様にドアを制御する、或いは、直ぐに遮蔽物を撤収する様に遮蔽物を制御しても良い。ここで、「ドア開登録手段」とは、例えば、エレベータの戸開ボタンである。
【0171】
この制御方法の採用により、ドアが全開するまで待つことなく、乗客はドアを通過することが出来る様になる。
【0172】
又、ステップST502又はステップST602に於いて、ドア制御手段18がドア制御方法(三)によってドアの開き方を制御している場合に、乗客がドア近くにあるドア閉ボタンを押すと、ドア制御手段18は、ドアが反転して閉まる様にドアを制御する、或いは、遮蔽物を出現させて通過出来なくなる様に遮蔽物を制御することとしても良い。
【0173】
これにより、外気が寒い等の理由でドアを早く閉めたり、或いは、遮蔽物で外気を早く遮断したりすることが出来る。又、ドアを早く閉めて、エレベータを早く出発させることが可能となる。
【0174】
尚、本実施の形態では、ドア制御手段18として、既設のエレベータのドア制御器を使用しても良いし、人数検知装置1専用のドア制御器を使用しても良い。しかし、既設のエレベータのドア制御器をドア制御手段18として活用することにより、本実施の形態に係る人数検知装置1の導入コストを低減することが出来るという効果が得られる。
【0175】
以上の様に、本実施の形態によれば、実施の形態1、2と同様の効果が得られると共に、計測手段11がエレベータの積載重量を計測する際に、ドア制御手段18がエレベータのドアの開き方を乗客が1人ずつ通過する様にドアを制御することにより、複数の乗客が横に並んで同時にエレベータに乗降車することを防止し、乗車人数、降車人数及び在場人数の推定精度を更に向上させることが出来るという効果が得られる。
【0176】
(実施の形態5)
特許文献3及び4では、ドア付近に設置された光電センサによって、乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にドアを通過すると、乗車人数と降車人数とを精度良く推定することが難しくなる。
【0177】
又、実施の形態2では、積載重量W(i)とその時間差分データW_diff(i)とによって乗車人数及び降車人数を推定している。しかし、乗客2人が横に並んで同時にエレベータに乗車すると、図15(a)に示す様な積載重量W(i)の時系列変化と、図15(b)に示す様な時間差分データW_diff(i)の時系列変化とが生じる場合がある。この場合、実施の形態2に於いて記載した波形観測手段16による人数推定方法(一)、(二)、(三)の何れかの方法により2人と判定することが難しくなる。
【0178】
そこで、本実施の形態では、乗車人数及び降車人数の推定精度を更に向上させる方法について示す。より詳細には、本実施の形態の特徴点は、既述した実施の形態3に実施の形態4で既述した技術を適用した点にある。
【0179】
図20は、本実施の形態に係る人数検知装置1の構成を示すブロック図である。この人数検知装置1は、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、処理単位決定手段17及びドア制御手段18を備える。尚、乗降人数推定手段12に於ける人数推定方法として、実施の形態2で述べた人数推定方法(一)、(二)、(三)の何れかの方法を利用する場合には、実施の形態2と同様に、乗降人数推定手段12は、時間差分データ作成手段15と波形観測手段16とによって構成される。本実施の形態でも、計測手段11を除いて、その他の各手段はマイクロコンピュータ上のソフトウェアによって構成されている。
【0180】
図20に於いて、ドア制御手段18は、計測手段11が計測する際に、エレベータのドアの開き方を乗客が1人ずつ通過するように制御する。尚、計測手段11、乗降人数推定手段12、乗客有無推定手段13、在場人数推定手段14、時間差分データ作成手段15、波形観測手段16、及び処理単位決定手段17は、実施の形態1の図1、実施の形態2の図4、実施の形態3の図11に示す対応構成要素と同一である。
【0181】
次に、本実施の形態に係る人数検知装置1の動作について、図面を参照して記載する。
【0182】
図21は、図20の乗降人数推定手段12が実施の形態1の図1の乗降人数推定手段12に対応する場合に於ける、本実施の形態に係る人数検知装置1の動作を示すフローチャートである。
【0183】
図21に於いて、ステップST701〜ステップST704の動作は、実施の形態4の図17に示すステップST501〜ステップST504の動作と同一のため、ここでの説明を省略する。
【0184】
又、図21に於いて、ステップST705及びステップST706の動作は、それぞれ、実施の形態3の図12に示すステップST304及びステップST305の動作と同一のため、ここでの説明を同様に省略する。
【0185】
又、図21に於けるステップST707の動作は、実施の形態4の図17に示すステップST505の動作と同一のため、ここでの説明を省略する。
【0186】
図21に於いて、ステップST708及びステップST709の動作は、それぞれ、実施の形態4の図17に示すステップST507及びステップST508の動作と同一のため、ここでの説明を省略する。
【0187】
次に、乗降人数推定手段12が時間差分データ作成手段15と波形観測手段16とによって構成されている場合の、図20の人数検知装置1の動作について、図22のフローチャートを参照して記載する。
【0188】
図22に於いて、ステップST801〜ステップST804の動作は、それぞれ、実施の形態4の図19に示すステップST601〜ステップST604の動作と同一のため、ここでの説明を省略する。
【0189】
又、図22に於ける、ステップST805〜ステップST807の動作は、それぞれ、実施の形態3の図13に示すステップST404〜ステップST406の動作と同一のため、ここでの説明を省略する。
【0190】
又、図22に於けるステップST808〜ステップST810の動作は、それぞれ、実施の形態5の図21に示すステップST707〜ステップST709の動作と同一のため、ここでの説明を省略する。
【0191】
尚、ステップST701又はステップST801に於ける計測手段11の計測開始条件として、ドアの戸開信号を使用しても良い。この場合には、ステップST702又はステップST802の戸開動作と、ステップST701又はステップST801の計測開始動作との順番は入れ替わる。そして、順番が入れ替わったステップST701又はステップST801では、計測手段11は、ドア制御手段18から戸開信号を受信して、その計測を開始する。
【0192】
又、ステップST704又はステップST804に於ける計測手段11の計測終了条件として、ドアの戸閉信号を使用しても良い。この場合には、ステップST707又はステップST808の戸閉動作と、ステップST704又はステップST804の計測終了動作との順番は入れ替わる。そして、順番が入れ替わったステップST704又はステップST804では、計測手段11は、ドア制御手段18から戸閉信号を受信して、その計測を終了する。
【0193】
尚、本実施の形態では、ドア制御手段18として、既設のエレベータのドア制御器を使用しても良いし、人数検知装置1専用のドア制御器を使用しても良い。しかし、既設のエレベータのドア制御器をドア制御手段18として活用することにより、本実施の形態に係る人数検知装置1の導入コストを低減することが出来るという効果がある。
【0194】
以上の様に、本実施の形態によれば、実施の形態3と同様の効果が得られると共に、計測手段11がエレベータの積載重量を計測する際に、ドア制御手段18がエレベータのドアの開き方を乗客が1人ずつ通過する様に制御することにより、複数の乗客が横に並んで同時にエレベータに乗降車することを防止し、以って、乗車人数、降車人数及び在場人数の推定精度を更に向上させることが出来ると言う効果が得られる。
【0195】
(付記)
以上、本発明の実施の形態を詳細に開示し記述したが、以上の記述は本発明の適用可能な局面を例示したものであって、本発明はこれに限定されるものではない。即ち、記述した局面に対する様々な修正や変形例を、この発明の範囲から逸脱することの無い範囲内で考えることが可能である。
【図面の簡単な説明】
【0196】
【図1】本発明の実施の形態1に係る人数検知装置の構成を示すブロック図である。
【図2】実施の形態1に係る人数検知装置の動作を示すフローチャートである。
【図3】エレベータの積載重量の時系列変化を示す図である。
【図4】本発明の実施の形態2に係る人数検知装置の構成を示すブロック図である。
【図5】エレベータの積載重量の時系列変化を示す図である。
【図6】実施の形態2に係る人数検知装置の動作を示すフローチャートである。
【図7】実施の形態2に係る人数検知装置の時間差分データ作成手段により作成された時間差分データの時系列変化の一例を示す図である。
【図8】実施の形態2に係る人数検知装置の波形観測手段が予め保持している標準モデルの時間差分データの時系列変化を示す図である。
【図9】実施の形態2に係る人数検知装置の時間差分データ作成手段により連続乗車の積載重量から作成された時間差分データの時系列変化の一例を示す図である。
【図10】実施の形態2に係る人数検知装置の波形観測手段により時間差分データの時系列変化が閾値以上になった回数(乗車人数の推定候補)を閾値毎にカウントした結果の一例を示す図である。
【図11】本発明の実施の形態3に係る人数検知装置の構成を示すブロック図である。
【図12】実施の形態3に係る人数検知装置の動作を示すフローチャートである。
【図13】実施の形態3に係る人数検知装置の動作を示すフローチャートである。
【図14】実施の形態3に係る人数検知装置の時間差分データ作成手段により作成された時間差分データの時系列変化の一例を示す図である。
【図15】乗客2人が横に並んで同時にエレベータに乗車するときに生じ得る、人数検知装置の時間差分データ作成手段により作成された時間差分データの時系列変化の一例を示す図である。
【図16】本発明の実施の形態4に係る人数検知装置の構成を示すブロック図である。
【図17】実施の形態4に係る人数検知装置の動作を示すフローチャートである。
【図18】実施の形態4に係る人数検知装置のドア制御手段によるエレベータのドアの開き方の制御方法を示す図である。
【図19】実施の形態4に係る人数検知装置の動作を示すフローチャートである。
【図20】本発明の実施の形態5に係る人数検知装置の構成を示すブロック図である。
【図21】実施の形態5に係る人数検知装置の動作を示すフローチャートである。
【図22】実施の形態5に係る人数検知装置の動作を示すフローチャートである。
【符号の説明】
【0197】
1 人数検知装置、11 計測手段、12 乗降人数推定手段、13 乗客有無推定手段、14 在場人数推定手段、15 時間差分データ作成手段、16 波形観測手段、17 処理単位決定手段、18 ドア制御手段。
【特許請求の範囲】
【請求項1】
閉空間内の乗車人数及び降車人数を推定するためのデータを計測する計測手段と、
前記計測手段により計測されたデータに基づいて乗車人数及び降車人数を推定する乗降人数推定手段と、
前記計測手段により計測されたデータに基づいて前記閉空間内の乗客有無を推定する乗客有無推定手段と、
前記乗降人数推定手段により推定された乗車人数及び降車人数の推定結果と、前記乗客有無推定手段の乗客有無推定結果とを受信して、(ア)前記乗客有無推定結果が無である場合には、前記閉空間内の在場人数を0人にリセットし、(イ)前記乗客有無推定結果が有である場合には、戸開前在場人数を前回の前記閉空間内の在場人数の推定結果とすると、{(前記戸開前在場人数)+(前記乗車人数の推定結果)−(前記降車人数の推定結果)}で与えられる式から前記閉空間内の在場人数を推定する在場人数推定手段とを備えることを特徴とする、
人数検知装置。
【請求項2】
請求項1記載の人数検知装置であって、
前記計測手段は、
所定のサンプリング周期で前記閉空間の積載重量を計測する重量センサであり、
前記乗降人数推定手段は、
計測された積載重量の差分間隔毎の変化を演算して時間差分データを作成する時間差分データ作成手段と、
前記時間差分データ作成手段により作成された時間差分データの時系列変化と所定の標準モデルの時間差分データの時系列変化又は所定の閾値とを比較して、前記閉空間の前記乗車人数及び前記降車人数を推定する波形観測手段とで構成されていることを特徴とする、
人数検知装置。
【請求項3】
請求項2記載の人数検知装置であって、
前記波形観測手段は、
前記時間差分データの時系列変化が上方向に凸の波形となっている場合には、前記時間差分データの時系列変化と、前記所定の標準モデルの時間差分データの内でその値が0以上となる第1標準モデルの時間差分データの時系列変化との類似度を表す第1正規化相互相関関数を演算し、前記第1正規化相互相関関数の値が所定の閾値以上となった回数を前記乗車人数と推定する一方、
前記時間差分データの時系列変化が下方向に凸の波形となっている場合には、前記時間差分データの時系列変化と、前記所定の標準モデルの時間差分データの内で前記第1標準モデルの時間差分データの符号を反転させて成る第2標準モデルの時間差分データの時系列変化との類似度を表す第2正規化相互相関関数を演算し、前記第2正規化相互相関関数の値が前記所定の閾値以上となった回数を前記降車人数と推定することを特徴とする、
人数検知装置。
【請求項4】
請求項2記載の人数検知装置であって、
前記波形観測手段は、
前記時間差分データの時系列変化が、所定の第1閾値以上になった回数を前記乗車人数と推定する一方、
前記時間差分データの時系列変化が、所定の第2閾値以下になった回数を前記降車人数と推定することを特徴とする、
人数検知装置。
【請求項5】
請求項2記載の人数検知装置であって、
前記波形観測手段は、
前記時間差分データの正の値に対して複数の第1閾値を設定し、前記時間差分データの時系列変化が設定した各第1閾値以上になった回数をカウントして最も多くカウントされた回数を前記乗車人数と推定する一方、
前記時間差分データの負の値に対して複数の第2閾値を設定し、前記時間差分データの時系列変化が設定した各第2閾値以下になった回数をカウントして最も多くカウントされた回数を前記降車人数と推定することを特徴とする、
人数検知装置。
【請求項6】
計測開始条件が満たされた時点から計測終了条件が満たされる時点迄の期間内に、閉空間内の乗車人数及び降車人数を推定するためのデータを計測する計測手段と、
前記計測手段により計測されたデータに基づいて乗車人数、降車人数及び暫定在場人数を推定する乗降人数推定手段と、
前記乗降人数推定手段によって前記乗車人数及び前記降車人数を推定する際のデータの1回の処理単位を動的に決定する処理単位決定手段と、
前記計測手段により計測されたデータに基づいて前記閉空間内の乗客有無を推定する乗客有無推定手段と、
前記計測終了条件が満たされた時点に於ける前記乗降人数推定手段により推定された暫定在場人数の推定結果と、前記乗客有無推定手段の乗客有無推定結果とを受信して、前記閉空間内の在場人数を推定する在場人数推定手段とを備え、
前記処理単位決定手段が、前記乗降人数推定手段が前記乗車人数及び前記降車人数を推定する際の一回の処理単位分のデータが前記計測手段により計測されたと判断するときには、
前記乗降人数推定手段は、
前記一回の処理単位分のデータに基づいて、前記一回の処理単位分のデータが計測された時点に於ける暫定乗車人数及び暫定降車人数を推定すると共に、
前回の処理単位に於ける乗車人数、降車人数及び暫定在場人数を用いて、
乗車人数=(前回の処理単位に於ける乗車人数)+(暫定乗車人数) ‥(1)
降車人数=(前回の処理単位に於ける降車人数)+(暫定降車人数) ‥(2)
暫定在場人数=(前回の処理単位に於ける暫定在場人数)+(暫定乗車人数)−(暫定降車人数) ‥(3)
より、今回の処理単位分のデータが計測された時点に於ける乗車人数、降車人数及び暫定在場人数を算出し、
前記計測終了条件が満たされた後に、前記在場人数推定手段は、(ア)前記乗客有無推定結果が無である場合には、前記閉空間内の在場人数を0人にリセットし、(イ)前記乗客有無推定結果が有である場合には、前記計測終了条件が満たされた時点に於ける前記乗降人数推定手段により式(3)に基づき推定された暫定在場人数を、前記閉空間内の前記在場人数と推定することを特徴とする、
人数検知装置。
【請求項7】
請求項1乃至6の何れか1項に記載の人数検知装置であって、
前記閉空間の出入口に設置されたドアの開き方を乗客が1人ずつ通過する様に制御するドア制御手段を更に備えたことを特徴とする、
人数検知装置。
【請求項8】
請求項1乃至7の何れかに記載の前記人数検知装置を、エレベータ内の乗車人数、降車人数及び在場人数を検知するための装置として備えることを特徴とする、
エレベータ。
【請求項1】
閉空間内の乗車人数及び降車人数を推定するためのデータを計測する計測手段と、
前記計測手段により計測されたデータに基づいて乗車人数及び降車人数を推定する乗降人数推定手段と、
前記計測手段により計測されたデータに基づいて前記閉空間内の乗客有無を推定する乗客有無推定手段と、
前記乗降人数推定手段により推定された乗車人数及び降車人数の推定結果と、前記乗客有無推定手段の乗客有無推定結果とを受信して、(ア)前記乗客有無推定結果が無である場合には、前記閉空間内の在場人数を0人にリセットし、(イ)前記乗客有無推定結果が有である場合には、戸開前在場人数を前回の前記閉空間内の在場人数の推定結果とすると、{(前記戸開前在場人数)+(前記乗車人数の推定結果)−(前記降車人数の推定結果)}で与えられる式から前記閉空間内の在場人数を推定する在場人数推定手段とを備えることを特徴とする、
人数検知装置。
【請求項2】
請求項1記載の人数検知装置であって、
前記計測手段は、
所定のサンプリング周期で前記閉空間の積載重量を計測する重量センサであり、
前記乗降人数推定手段は、
計測された積載重量の差分間隔毎の変化を演算して時間差分データを作成する時間差分データ作成手段と、
前記時間差分データ作成手段により作成された時間差分データの時系列変化と所定の標準モデルの時間差分データの時系列変化又は所定の閾値とを比較して、前記閉空間の前記乗車人数及び前記降車人数を推定する波形観測手段とで構成されていることを特徴とする、
人数検知装置。
【請求項3】
請求項2記載の人数検知装置であって、
前記波形観測手段は、
前記時間差分データの時系列変化が上方向に凸の波形となっている場合には、前記時間差分データの時系列変化と、前記所定の標準モデルの時間差分データの内でその値が0以上となる第1標準モデルの時間差分データの時系列変化との類似度を表す第1正規化相互相関関数を演算し、前記第1正規化相互相関関数の値が所定の閾値以上となった回数を前記乗車人数と推定する一方、
前記時間差分データの時系列変化が下方向に凸の波形となっている場合には、前記時間差分データの時系列変化と、前記所定の標準モデルの時間差分データの内で前記第1標準モデルの時間差分データの符号を反転させて成る第2標準モデルの時間差分データの時系列変化との類似度を表す第2正規化相互相関関数を演算し、前記第2正規化相互相関関数の値が前記所定の閾値以上となった回数を前記降車人数と推定することを特徴とする、
人数検知装置。
【請求項4】
請求項2記載の人数検知装置であって、
前記波形観測手段は、
前記時間差分データの時系列変化が、所定の第1閾値以上になった回数を前記乗車人数と推定する一方、
前記時間差分データの時系列変化が、所定の第2閾値以下になった回数を前記降車人数と推定することを特徴とする、
人数検知装置。
【請求項5】
請求項2記載の人数検知装置であって、
前記波形観測手段は、
前記時間差分データの正の値に対して複数の第1閾値を設定し、前記時間差分データの時系列変化が設定した各第1閾値以上になった回数をカウントして最も多くカウントされた回数を前記乗車人数と推定する一方、
前記時間差分データの負の値に対して複数の第2閾値を設定し、前記時間差分データの時系列変化が設定した各第2閾値以下になった回数をカウントして最も多くカウントされた回数を前記降車人数と推定することを特徴とする、
人数検知装置。
【請求項6】
計測開始条件が満たされた時点から計測終了条件が満たされる時点迄の期間内に、閉空間内の乗車人数及び降車人数を推定するためのデータを計測する計測手段と、
前記計測手段により計測されたデータに基づいて乗車人数、降車人数及び暫定在場人数を推定する乗降人数推定手段と、
前記乗降人数推定手段によって前記乗車人数及び前記降車人数を推定する際のデータの1回の処理単位を動的に決定する処理単位決定手段と、
前記計測手段により計測されたデータに基づいて前記閉空間内の乗客有無を推定する乗客有無推定手段と、
前記計測終了条件が満たされた時点に於ける前記乗降人数推定手段により推定された暫定在場人数の推定結果と、前記乗客有無推定手段の乗客有無推定結果とを受信して、前記閉空間内の在場人数を推定する在場人数推定手段とを備え、
前記処理単位決定手段が、前記乗降人数推定手段が前記乗車人数及び前記降車人数を推定する際の一回の処理単位分のデータが前記計測手段により計測されたと判断するときには、
前記乗降人数推定手段は、
前記一回の処理単位分のデータに基づいて、前記一回の処理単位分のデータが計測された時点に於ける暫定乗車人数及び暫定降車人数を推定すると共に、
前回の処理単位に於ける乗車人数、降車人数及び暫定在場人数を用いて、
乗車人数=(前回の処理単位に於ける乗車人数)+(暫定乗車人数) ‥(1)
降車人数=(前回の処理単位に於ける降車人数)+(暫定降車人数) ‥(2)
暫定在場人数=(前回の処理単位に於ける暫定在場人数)+(暫定乗車人数)−(暫定降車人数) ‥(3)
より、今回の処理単位分のデータが計測された時点に於ける乗車人数、降車人数及び暫定在場人数を算出し、
前記計測終了条件が満たされた後に、前記在場人数推定手段は、(ア)前記乗客有無推定結果が無である場合には、前記閉空間内の在場人数を0人にリセットし、(イ)前記乗客有無推定結果が有である場合には、前記計測終了条件が満たされた時点に於ける前記乗降人数推定手段により式(3)に基づき推定された暫定在場人数を、前記閉空間内の前記在場人数と推定することを特徴とする、
人数検知装置。
【請求項7】
請求項1乃至6の何れか1項に記載の人数検知装置であって、
前記閉空間の出入口に設置されたドアの開き方を乗客が1人ずつ通過する様に制御するドア制御手段を更に備えたことを特徴とする、
人数検知装置。
【請求項8】
請求項1乃至7の何れかに記載の前記人数検知装置を、エレベータ内の乗車人数、降車人数及び在場人数を検知するための装置として備えることを特徴とする、
エレベータ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2009−102166(P2009−102166A)
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2008−201396(P2008−201396)
【出願日】平成20年8月5日(2008.8.5)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成20年8月5日(2008.8.5)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]