
人横断支援車両システム及び人横断支援方法
【課題】横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する歩行者横断支援車両システムを提供する。
【解決手段】人を検出する人検出手段2と、車両の位置情報を検出する自車位置検出手段3と、人検出手段2が検出した人を横断候補者として、横断候補者の絶対的な位置を計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算結果を人位置及び待機スコア記憶手段6に記憶する位置及び待機スコア計算手段5と、横断候補者の人位置および待機スコアに基づいて、車両を停車させるか否かを判断する停車判断手段10と、停車判断手段が車両を停車させると判断した場合に車両を停車させる走行制御手段12と、停車判断手段の指令に基づき、横断候補者に対し道路を横断可能か否かの旨の情報を表示する信号機である歩行者横断信号表示手段13と、を備える。
【解決手段】人を検出する人検出手段2と、車両の位置情報を検出する自車位置検出手段3と、人検出手段2が検出した人を横断候補者として、横断候補者の絶対的な位置を計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算結果を人位置及び待機スコア記憶手段6に記憶する位置及び待機スコア計算手段5と、横断候補者の人位置および待機スコアに基づいて、車両を停車させるか否かを判断する停車判断手段10と、停車判断手段が車両を停車させると判断した場合に車両を停車させる走行制御手段12と、停車判断手段の指令に基づき、横断候補者に対し道路を横断可能か否かの旨の情報を表示する信号機である歩行者横断信号表示手段13と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自律移動車、乗用車などの車両における、歩行者が任意の場所で道路を安全に横断することを支援する歩行者横断支援車両システム及び歩行者横断支援方法に係るものである。
【背景技術】
【0002】
従来、車両において、車両の周囲に存在する歩行者を含む障害物を検出し、そして、当該車両と障害物との衝突の危険性があると判断された場合には、車両を停車する、あるいは車両の運転者へ警告を発する衝突回避支援用の装置が開示されている(例えば、特許文献1参照)。
【0003】
また、道路上に予め設置された横断歩道において、歩行者の安全な横断を支援する装置が開示されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−105891号公報
【特許文献2】特開2002−175590号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術によれば、歩行者が車道に飛び出した際の歩行者と車両との衝突の防止や、道路上に予め設置された横断歩道における歩行者の安全な横断の支援が実現できる。
【0006】
しかしながら、横断歩道が設置されていない道路においては、歩行者の飛び出しに伴って車両が急ブレーキをかけるような状況を避け、歩行者が安全に車道を横断可能とすることは、従来技術では実現困難であった。
【0007】
横断歩道が設置されていない道路においては、横断歩道が存在せず、かつ歩行者用信号機も存在しないことにより、歩行者の安全な道路横断が困難となる。即ち、道路側に歩行者の横断を支援する設備が存在しないため、歩行者自身が目視などによって走行中の車両を認識し、道路を横断するか否かを判断しなければならない。しかし、歩行者による目視などでの車両の認識には限界があり、特に車両が今後どのように動くかを予測することは困難である。
【0008】
また、道路に横断歩道や歩行者用信号機などの設備を設置すれば歩行者の安全な道路横断が可能となるが、歩行者が希望する任意の場所で道路を安全に横断するためには大量の横断歩道や歩行者用信号機などの設備が必要となり、設備増強の費用が高くなるという問題があった。
【0009】
本発明は、前記の課題を解決するための発明であって、歩行者の安全な道路横断を支援することができる人横断支援車両システム及び人横断支援方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記目的を達成するため、本発明では、車両自身に歩行者用信号機の機能を持たせている。歩行者または自転車に乗った人などに対しての危険源となる車両自身が歩行者用信号機を持つため、危険源の近傍には必ず歩行者用信号機が存在することを保証できる。さらに、車両自身が歩行者用信号機の機能を持つことにより、車両が今後どのように動くかという情報を人に通知することが可能になる利点もある。
【0011】
本発明の人横断支援車両システムは、人が任意の場所で道路を安全に横断することを支援する車両システムであって、衝突回避支援のために横断候補者である人を検出する人検出手段と、自車位置検出手段と、人検出手段及び自車位置検出手段からの位置情報を基に、横断候補者の人の位置情報を人位置として計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算の結果を人位置・待機スコア記憶手段(例えば、人位置及び待機スコア記憶手段6)に記憶する人位置・待機スコア計算手段(例えば、人位置及び待機スコア計算手段5)と、横断候補者の人位置及び前記待機スコアに基づいて、人が道路を安全に横断可能とするために車両を停車させるか否かを判断する停車判断手段と、前記停車判断手段が車両を停車させると判断した場合に車両を停車させる機能を持つ走行制御手段と、人が道路を安全に横断可能か否かの旨の情報を表示する人横断信号表示手段(例えば、歩行者横断信号表示手段13)と、を備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、歩行者の安全な道路横断を支援することができる。
【図面の簡単な説明】
【0013】
【図1】歩行者横断支援車両システムの構成を示すブロック図である。
【図2】歩行者横断支援車両システムを搭載した車両を示す側面方向から見た断面図である。
【図3】歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。
【図4】歩行者横断支援車両システムにおける人位置及び待機スコア計算手段の処理手順を示すフローチャートである。
【図5】歩行者横断支援車両システムにおける人検出手段が人を検出している状態を示す平面図である。
【図6】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。
【図7】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。
【図8】歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。
【図9】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。
【図10】歩行者横断支援車両システムを搭載した車両が走行している環境を示す他の平面図である。
【図11】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。
【図12】歩行者横断支援車両システムを搭載した車両が走行している環境を示すさらに他の平面図である。
【図13】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すさらに他のグラフである。
【図14】歩行者横断支援車両システムにおける停車判断手段の処理手順を示すフローチャートである。
【図15】歩行者横断支援車両システムにおける停車信号解析手段の処理手順を示すフローチャートである。
【図16】歩行者横断支援車両システムの変形例となる構成を示すブロック図である。
【図17】歩行者横断支援車両システムの変形例の運用の形態を示す平面図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について、図面を参照しながら詳細に説明する。
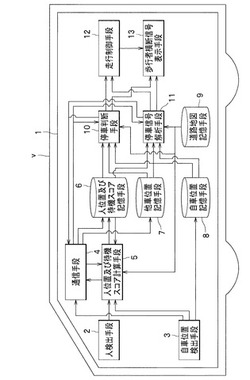
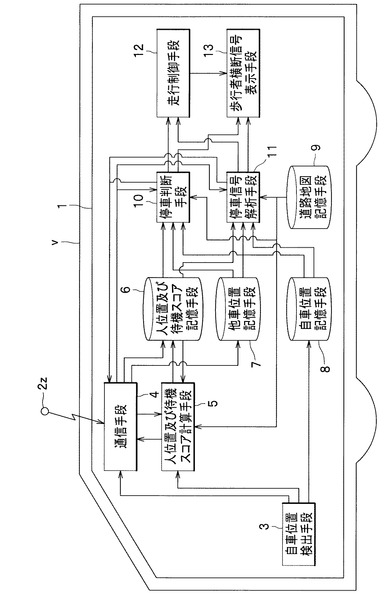
図1は、歩行者横断支援車両システムの構成を示すブロック図である。歩行者横断支援車両システム1(人横断支援車両システム)は、自律移動車、乗用車などの車両vに搭載され、当該車両vが走行中の道路を、歩行者や自転車に乗った人などの、人mが安全に横断することを支援するものである。なお、当該車両vを「自車v」あるいは「他車v」とも記述する。
【0015】
歩行者横断支援車両システム1は、人検出手段2、自車位置検出手段3(車両位置検出手段)、通信手段4、人位置及び待機スコア計算手段5(人位置・待機スコア計算手段)、人位置及び待機スコア記憶手段6(人位置・待機スコア記憶手段)、他車位置記憶手段7、自車位置記憶手段8、道路地図記憶手段9、停車判断手段10、停車信号解析手段11、走行制御手段12、歩行者横断信号表示手段13(人横断信号表示手段)を含んで構成する。
【0016】
続いて、以上の構成要素を個別に説明する。
人検出手段2は、自車vの進行方向に存在する歩行者や自転車に乗った人などの、人mの検出手段であり、人mの自車vからの相対的な位置情報を取得する。また、実施形態によっては、相対的な位置情報だけでなく、予め記憶された動作パターン、例えば手を挙げるなどのジェスチャー(動作行動)をも認識する。なお、そのための具体的な検出方法/装置は既に公知の技術であり、一般道路上での人mの検出手段には、例えば特開2002−75595号公報「車両の安全運転支援システム」により提案されている技術を用いるとよい。また、相対的な位置の取得には、例えば特開2005−234694号公報「車外監視装置」により提案されている技術を用いるとよい。また、手を挙げるなどのジェスチャーの認識には、例えばProject Natal(http://www.xbox.com/projectnatal/)により提案されている技術を用いるとよい。
【0017】
自車位置検出手段3は、自車vの現在位置(地上での絶対的な位置)を取得する。なお、そのための具体的な検出方法/装置は既に公知の技術であり、例えば、GNSS(Global Navigation Satellite System)の一種である、RTK−GPS(Real Time Kinematic Global Positioning System)を用いる。あるいは、書籍「ビークル」(著者:金井 喜美雄 ほか、出版社:コロナ社、出版年:2003年、ISBN:978-4-339-03363-2)に記載されている、ランドマークを用いた自己位置推定技術を用いる。
【0018】
通信手段4は、自車vと、自車vの周辺にいる他車vとの間で通信を行う。なお、そのための具体的な検出方法/装置は既に公知の技術であり、例えば、ITS情報通信システム推進会議(http://www.itsforum.gr.jp/)が策定した「5.8GHz帯を用いた車々間通信システムの実験用ガイドライン(ITS FORUM RC-005)」や「700MHz帯を用いた運転支援通信システムの実験用ガイドライン(ITS FORUM RC-006)」、あるいはIEEE(http://www.ieee.org/)が策定した「IEEE802.11p」や「IEEE1609」を用いる。また、自車vの周辺にいる他車vとの通信のためには、位置ベースでのルーティング技術が必要であり、当該技術はGeo-Routingと呼ばれている公知の技術である。通信内容の詳細については後述する。
【0019】
人位置及び待機スコア計算手段5は、人検出手段2が取得した人m(横断候補者)の自車vからの相対的な位置情報と、自車位置検出手段3が取得した自車vの絶対的な位置情報を用いて、人mの絶対的な位置を計算する。また、人mが道路を横断するために待機している時間を計測することで、待機スコアaと呼ぶ待機状態の指標を計算する。また、本実施形態では、人検出手段2で示したジェスチャーの認識判定は、人位置及び待機スコア計算手段5が有しているものとして説明する。この際には、ジェスチャーの動作パターンは、人位置及び待機スコア記憶手段6に記憶しておくとよい。なお、処理手順の詳細については図4を参照して後述する。
【0020】
人位置及び待機スコア記憶手段6は、人位置及び待機スコア計算手段5が計算した、人mの絶対的な位置及び待機スコアaを記憶する。人mの絶対的な位置及び待機スコアaは、他車vに搭載された人位置及び待機スコア計算手段5a(図示せず)が計算した結果を、通信手段4を介して取得したものである場合もある。
【0021】
他車位置記憶手段7は、他車vに搭載された自車位置検出手段3a(図示せず)が取得した他車vの現在位置を、通信手段4を介して取得して記憶する。
【0022】
自車位置記憶手段8は、自車vに搭載された自車位置検出手段3が取得した自車の現在位置を記憶する。
【0023】
道路地図記憶手段9は、自車vが走行する環境の道路情報が記載された地図(道路地図情報)を記憶する。道路地図記憶手段9が記憶する地図は、カーナビゲーションシステムにおいて用いられている道路地図と同等の地図であり、交差点位置、車線数、一方通行、停車禁止位置などの情報を含む道路地図である。
【0024】
なお、前記に加えて、後述する横断待機帯w、歩道pの位置情報をも含む道路地図を記憶する。横断待機帯w及び歩道pの表現方法は、2通りある。1つ目は、絶対的な座標値によって横断待機帯w及び歩道pの位置が指定される地図表現である。2つ目は、路肩から何メートルが横断待機帯で、何メートルが歩道、といった、路肩からの相対的な地図表現である。具体的には、道路地図情報に、この道路地図上の所定の区間には、車道d(図3参照)から何メートルの領域に横断待機帯w(図3参照)があり、何メートルの領域に歩道pがあることが記載されていてもよいし、道路何号線の区間情報として、横断待機帯wと歩道pの情報を含んでいてもよい。
【0025】
停車判断手段10は、人位置及び待機スコア記憶手段6が記憶する人mの位置及び待機スコアaの情報、他車位置記憶手段7が記憶する他車vの位置情報、自車位置記憶手段8が記憶する自車vの位置情報、道路地図記憶手段9が記憶する道路地図情報を用いて、人mが道路を安全に横断可能とするため、自車vを停車させるか否かを判断する。待機スコアaが、停車閾値xと呼ぶ値を超過している場合には、自車vを停車させる。また、自車vを停車させると判断した場合、自車vが停車するという停車信号を、通信手段4を用いて他車vに搭載された停車信号解析手段11a(図示せず)に送信する。なお、処理手順の詳細については、図14を参照して後述する。
【0026】
停車信号解析手段11は、他車vに搭載された停車判断手段10aから送信された停車信号を受信し、他車位置記憶手段7が記憶する他車vの位置情報、自車位置記憶手段8が記憶する自車vの位置情報、道路地図記憶手段9が記憶する道路地図情報を用いて、自車vの停車位置を決定する。なお、処理手順の詳細については、図15を参照して後述する。
【0027】
走行制御手段12は、自車vを目的地まで走行させる機能と、停車判断手段10または停車信号解析手段11が自車vを停車させると判断した場合に自車vを停車させる機能を持つ。なお、走行機能は、例えば、書籍「ビークル」(著者:金井 喜美雄 ほか、出版社:コロナ社、出版年:2003年、ISBN:978-4-339-03363-2)に記載されている公知の技術を用いる。
【0028】
歩行者横断信号表示手段13は、自車vに搭載され、人mが道路を安全に横断可能か否かの情報を、人mに対して表示する信号機である。停車判断手段10または停車信号解析手段11が自車vを停車させると判断し、かつ走行制御手段12が自車vを停車状態に制御している場合には、人mが道路を安全に横断可能である旨の信号を表示する。そうでない場合には、人mが道路を横断するのは危険である旨の信号を表示する。
【0029】
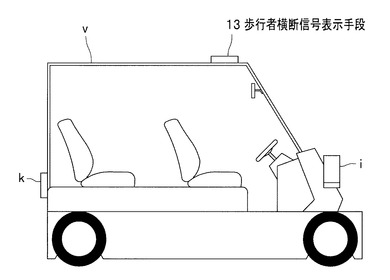
図2は、歩行者横断支援車両システムを搭載した車両を示す側面方向から見た断面図である。図2を参照して、歩行者横断支援車両システム1を搭載した車両vの、歩行者横断信号表示手段13の実施形態について説明する。
【0030】
歩行者横断信号表示手段13は、ヘッドライトiやテールライトkと同様の電灯であり、LED(Light Emitting Diode)などを用いる。また、歩行者横断信号表示手段13は、車両vの周辺にいる人mから目視しやすい位置に設置する。例えば、車両vのルーフ上の歩道側に設置する。歩行者横断信号表示手段13の電灯の色は、ヘッドライトiやテールライトkとは異なり、例えば、青色点灯と青色点滅と赤色点灯と消灯の各状態を、停車判断手段10または停車信号解析手段11からの指令に応じて表示する機能を持つ。車両vが停車していて、かつ人mが道路を安全に横断可能な場合には、青色点灯することで人mに横断可能であることを伝達する。車両vが停車しているが、一定時間(所定時間)内に走行を開始する場合には、青色点滅することで人mに一定時間(所定時間)内に車両vが走行を開始することを伝達する。車両vが走行している場合、即ち人mが道路を横断するのは危険な場合には、赤色点灯することで人mに道路の横断が危険であることを伝達する。車両vが停車しているが、人mが道路を安全に横断可能か未知な場合には、消灯する。
【0031】
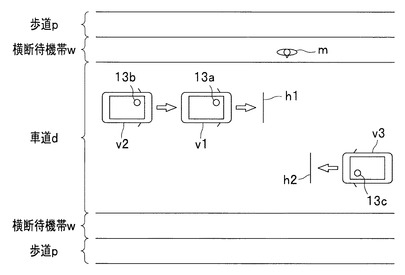
図3は、歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。図3を参照して、歩行者横断支援車両システム1を搭載した車両vの運用の形態について説明する。
【0032】
本発明の実施においては、車道dと歩道pの間に、横断待機帯wと呼ぶ領域を設ける。横断待機帯wは、道路を横断する意思のある人mが待機する場所である。横断待機帯wは、白線などを地面に描くだけで設置可能なため、設備増強の費用は安い。なお、横断待機帯wの有無は、地図情報に含まれており、道路地図記憶手段9が道路地図情報を記憶している。
【0033】
人mが横断候補者として、横断待機帯wで静止したまま事前に設定した一定時間(所定時間)が経過した場合(例えば人mが3メートル以上移動しないまま1分間経過した場合)、あるいは人mが横断待機帯wで手を挙げるなどの所定のジェスチャーを、事前に設定した一定時間(所定時間)行っていた場合の少なくともどちらか一方では、歩行者横断支援車両システム1が人mに道路を横断する意思があると解釈し、人mの手前で車両vを停車させ、歩行者横断信号表示手段13を青色点灯することで人mに横断可能であることを伝達する。
【0034】
例えば、図3に示す車両v1に搭載された歩行者横断支援車両システム1a(図示せず)が人mに道路を横断する意思があると解釈した場合、車両v1は人mの手前の停車位置h1で停車し、歩行者横断信号表示手段13aを青色点灯する。
【0035】
また、歩行者横断支援車両システム1aは、車両v1が停車するという情報を、通信手段4を用いて車両v1から一定の距離内(例えば100メートル以内)にいる他車vに送信する。当該情報を受信することで、車両v1と同車線を走行中の車両v2は、車両v1の後方に停車し、歩行者横断信号表示手段13bを消灯する。また車両v1の反対車線を走行中の車両v3は、人mの手前の停車位置h2で停車し、歩行者横断信号表示手段13cを青色点灯する。
【0036】
車両vが停車して歩行者横断信号表示手段13を青色点灯した後、人mが道路の横断を完了した場合、あるいは事前に設定した一定時間(所定時間)が経過した場合の少なくともどちらか一方では、歩行者横断支援車両システム1が車両vの走行を再開するために、歩行者横断信号表示手段13を青色点滅することで人mに一定時間内に車両vが走行を開始することを伝達する。なお、車両vが停車し、かつ歩行者横断信号表示手段13が消灯していた場合には、当該条件時に歩行者横断信号表示手段13を青色点滅することはない。
【0037】
車両vが走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達する。
【0038】
図4は、歩行者横断支援車両システムにおける人位置及び待機スコア計算手段の処理手順を示すフローチャートである。図4に示すフローチャートを参照して、人位置及び待機スコア計算手段5の処理手順について説明する。なお、人位置及び待機スコア計算手段5は、図4に示すフローチャートの処理手順を一定時間(所定時間)間隔でループ実行する。ループ実行の時間間隔は、人検出手段2が人mを検出する周期と等しくする。
【0039】
最初に、人位置及び待機スコア計算手段5は、人検出手段2が自車vの進行方向に存在する歩行者や自転車に乗った人などの、人mを検出しているかどうかを判断する(ステップS11)。人検出手段2は、1人以上(複数の人mを検出する場合もある)の人mを検出している場合には(ステップS11,Yes)、ステップS12に進む。一方で、人mを1人も検出していない場合には(ステップS11,No)、ステップS14に進む。
【0040】
次に、人位置及び待機スコア計算手段5は、人検出手段2が人mを検出している場合に、検出した人mに道路を横断する意思があるかどうかを判定するために、人mが横断待機帯wで静止または手を挙げるジェスチャーを行っているかどうかを判断する(ステップS12)。複数の人mを検出している場合には、それぞれの人mにおいて静止または前記ジェスチャーを行っているかどうかを判断する。当該判断を行うために、人検出手段2が検出した、人mの自車vからの相対的な位置情報を取得する。さらに実施形態によっては、人検出手段2が検出した、人mがとっているジェスチャーの姿勢情報をも取得する。
【0041】
また、人位置及び待機スコア計算手段5は、自車位置検出手段3が取得した自車vの絶対的な位置情報を取得する。まず、人mの自車vからの相対的な位置情報と、自車vの絶対的な位置情報を用いて、人mの絶対的な位置を計算する。また、道路地図記憶手段9から、横断待機帯wの位置を取得する。これによって、人mが横断待機帯w上に位置しているか否かを判断する。
【0042】
次に、人mに道路を横断する意思があるかどうかの判定は、具体的には、例えば、人mが横断待機帯w上で3メートル以上移動しないまま1分間経過した場合、あるいは人mが横断待機帯w上で手を挙げるジェスチャーの姿勢をとったまま1分間経過した場合の少なくともどちらか一方では、人mに道路を横断する意思があると判定することで行う。なお、判定基準となるジェスチャーの動作パターンは、人位置及び待機スコア記憶手段6に予め記憶されている。
【0043】
ただし、当該判定のための各種閾値(上記の「3メートル」、「1分間」)は、これに限定されるものではない(「5メートル」、「30秒間」などでもよい)。道路を横断する意思があると判定された人mが1人以上いた場合には(ステップS12,Yes)、ステップS13に、1人もいなかった場合には(ステップS12,No)、ステップS14に進む。
【0044】
続いて、道路を横断する意思があると判定された人mが2人以上いた場合には、待機している人mのグルーピングを行う(ステップS13)。これは、複数人が道路横断のために待機していた場合に、車両vを適切な位置に停車させるために行うものである。人検出手段2が検出した人mの位置情報を用いて、複数の人mそれぞれの間の距離を計算する。人mの間の距離が事前に設定した一定距離(車両vの全長より数メートル以上長い距離とする)以下だった場合には、該当する人mの集団を1つのグループgとし、車道dに沿ったグループgの両端位置を計算する。例えば、所定の条件として人mの間の距離が7メートル以下だった場合には、1つのグループgとする。ここで図5を参照して、具体例を説明する。
【0045】
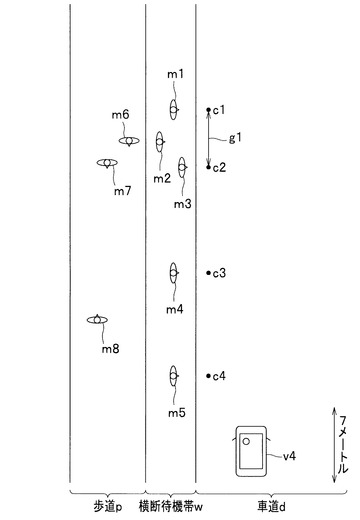
図5は、歩行者横断支援車両システムにおける人検出手段が人を検出している状態を示す平面図である。図5には、自車v4に搭載された人検出手段2(図1参照)が、人m1から人m8の8人を検出している状態を示す。人m1から人m5の5人に関しては、横断待機帯w上で所定時間以上静止しており、道路を横断する意思があるとステップS12で判定される。一方で人m6から人m8の3人に関しては、横断待機帯w上にいないため、道路を横断する意思はないとステップS12で判定される。
【0046】
この場合、道路を横断する意思があると判定されている人m1から人m5の5人に関して、グルーピングを行う。図5の例では、人mの間の距離が7メートル以下だった場合には、1つのグループgとする。人m1と人m2の間の距離、及び人m2と人m3の間の距離は、7メートル以下であるため、人m1と人m2と人m3の3人を1つのグループg1としてまとめる。
【0047】
その後、グループg1に属する両端の人mの、車道dの進行方向に沿った位置cを計算する。図5の例では、グループg1を表す矢印の両端の位置、即ち人m1と人m3の車道dの進行方向に沿った位置c1及び位置c2を計算する。一方で人m3と人m4の間の距離、及び人m4と人m5の間の距離は、いずれも7メートルを超過している。よって、人m4と人m5に関しては、グルーピングしない。なお、グループgに属さないとしても、車道dの進行方向に沿った位置cを計算する。人m4に対しては位置c3、人m5に対しては位置c4が求まる。
【0048】
なお、例えば人m3と人m6の間の距離は7メートル以下であるが、人m6は横断待機帯w上におらず、道路を横断する意思はないとステップS12で判定されているため、人m6をグループg1に加えることはない。また、グループgが大きくなりすぎると車両vの停車位置がなくなるため、グループgの最大長を事前に定め、それ以上となる場合には当該位置でグループgを分割することとする。例えば、グループgの最大長を20メートルと設定する。
【0049】
図4に戻り、人位置及び待機スコア計算手段5は、ステップS13の処理の結果について、車車間通信で周辺の人位置の情報を共有する(ステップS14)。即ち、通信手段4を用いて周辺の車両vと周辺の人位置を共有する。自車vから一定の距離内(例えば100メートル以内)にいる他車vに対して、道路を横断する意思があるとステップS12で判定されているグループgまたは人m自身の、車道dの進行方向に沿った位置cの情報を送信する。また同時に、自車vから一定の距離内(例えば100メートル以内)にいる他車vから、当該情報を受信する。これにより、自車vが検出できていない人mが自車vの周辺にいたとしても、他車vが検出した情報を用いて補完することが可能である。
【0050】
さらに、人位置及び待機スコア計算手段5は、図4に示すフローチャートの処理手順を一定時間(所定時間)間隔でループ実行しているため、過去一定の時間以内に検出した当該情報をも共有する。例えば、現時刻から1分前までに検出した当該情報を共有する。過去一定の時間以内に検出した当該情報を共有する場合には、1ループ前のステップS16で求めた、待機スコアaと呼ぶ待機状態の指標の情報も共有する。待機スコアaは、重複を除いた個々の人mまたはグループgに対して、それぞれ1つの待機スコアaが計算されている。
【0051】
次に、人位置及び待機スコア計算手段5は、ステップS14で取得した人mの車道dの進行方向に沿った位置cの対応付け(人位置を対応付け)を行う(ステップS15)。この対応付けには2つの意味がある。1つ目は、同一の人mを複数の車両vで検出している場合、あるいは過去に検出した人mと同一の人mを検出している場合があるため、同一の人mを重複して扱わないようにするための対応付けである。2つ目は、個々の人mまたはグループgに対して、待機スコアaと呼ぶ待機状態の指標を、どの車両vが計算するかの担当を決定するための対応付けである。
【0052】
まず、人mの重複を回避するため、取得した複数の人mの位置cのそれぞれの間の距離を計算し、事前に設定した一定距離(人検出手段2の検出位置誤差程度の距離とする)以下だった場合には、該当する複数の人mは同一の人mであるとする。例えば、複数の人mの位置cのそれぞれの間の距離が0.5メートル以下であった場合には、同一の人mであるとする。なお、この際に、過去に検出した人mと同一であった場合には、過去に検出した人mまたはグループgに対応付けられている待機スコアaの情報を引き継ぐ。過去に検出しておらず、現時刻で初めて検出した人mまたはグループgである場合には、待機スコアaの初期値は「0」(ゼロ)とする。
【0053】
続いて、個々の人mまたはグループgに対して、待機スコアaを計算する担当の車両vを決定する。個々の人mまたはグループgを、現時刻において1つの車両vのみが検出している場合には、当該車両vが待機スコアaを計算する担当となる。個々の人mまたはグループgを、現時刻において複数の車両vが検出している場合には、例えば、それぞれ個々の人mまたはグループgに最も近い車両vが待機スコアaを計算する担当となる。一方で、個々の人mまたはグループgを現時刻においてどの車両vも検出していない場合には、例えば、1ループ前に担当していた車両vが待機スコアaを計算する担当を引き継ぐ。ただし、待機スコアaを計算する担当の決め方は、これに限定されるものではない。
【0054】
ここで、個々の人mまたはグループgの待機スコアaを計算する担当の車両vが、それぞれの人mまたはグループgが道路を横断するために待機している時間を計測することで、待機スコアaを計算する(ステップS16)。道路を横断する意思がある、即ち道路横断のために待機しているとステップS12で判定されている個々の人mまたはグループgに対して、待機している時間の経過とともに待機スコアaを増加させる。即ち、現時刻で初めて検出した人mまたはグループgである場合には、待機スコアaの初期値である「0」(ゼロ)であり、また過去に検出した人mまたはグループgと同一の人mまたはグループgを検出した場合には、1ループ前から引き継いだ待機スコアaに対して、ループ実行の時間間隔分、待機スコアaを増加させる。
【0055】
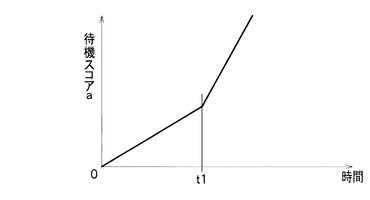
図6は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。待機スコアaの増加は、例えば図6のグラフに示すように、待機スコアaを待機している時間に比例させる。比例定数(図6のグラフの傾き)は任意の値でよく、例えば比例定数を「1」、時間の単位を秒とすれば、10秒間待機していたときの待機スコアaは「10」となる。また、グループgに属する人mの数に応じて比例定数を変化させてもよい。
【0056】
図7は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。例えば図7のグラフに示すように、最初は1人の人mが待機していたが、時刻t1に1人増えて2人のグループgとなった場合、比例定数を2倍にしてもよい。これによって、多くの人mが道路横断のために待機している場合、待機スコアaの増加を速くし、車両vが停車するまでの待ち時間を短くすることができる。
【0057】
図4に戻り、次に、人位置及び待機スコア計算手段5は、人mまたはグループgを長時間にわたってどの車両vも検出していない場合に備え、未検出期間がリセット閾値yと呼ぶ値を超過しているか否かを判断する(ステップS17)。
【0058】
人位置及び待機スコア計算手段5は、過去一定の時間以内に検出した人mまたはグループgに対しても、検出していない期間も継続して待機スコアaを計算している。しかし、長時間にわたって人mまたはグループgを検出していない場合、人mまたはグループgが最後に検出された状態のまま待機を続けている保証はない。
【0059】
また、人mまたはグループgを未検出ということは、人mまたはグループgを検出可能な範囲に車両vが存在しないことを意味する。即ち、長時間にわたって人mまたはグループgを検出していない場合、その付近には車両vが走行しておらず、人mまたはグループgは既に道路横断を完了している可能性が高い。
【0060】
よって、長時間にわたって人mまたはグループgを検出していない場合、人mまたはグループgは既に道路横断を完了していると見なすため、最後に人mまたはグループgを検出してから未検出が続いている時間の長さを、個々の人mまたはグループg毎に計測する。そして、未検出期間が事前に設定したリセット閾値yを超過しているか否かを判断する。超過していなかった場合には(ステップS17,No)、ステップS19に進む。
【0061】
未検出期間がリセット閾値yを超過していた場合には(ステップS17,Yes)、該当する人位置を消去する(ステップS18)。即ち、リセット閾値yを超過した人mまたはグループgは既に道路横断を完了していると判断し、該当する位置cと待機スコアaの情報を消去する。
【0062】
最後に、人位置及び待機スコア計算手段5は、通信手段4を用いて、車車間通信で待機スコアaを共有する(ステップS19)。即ち、個々の人mまたはグループgの位置cと待機スコアaの情報を、一定の距離内(例えば100メートル以内)にいる車両vと共有して、人位置及び待機スコア記憶手段6に記憶する。以上、図4に示すフローチャートが、人位置及び待機スコア計算手段5の処理手順である。
【0063】
続いて、図8から図13を参照して、人位置及び待機スコア計算手段5の処理手順の具体例について説明する。図8、図10、及び図12は、歩行者横断支援車両システム1を搭載した車両vが走行している環境の、それぞれ異なる状況を示す平面図である。図9、図11、及び図13は、待機スコアaと人mまたはグループgが道路横断のために待機している時間との関係を示すグラフである。図9のグラフは図8の状況に対応し、図11のグラフは図10の状況に対応し、図13のグラフは図12の状況に対応する。
【0064】
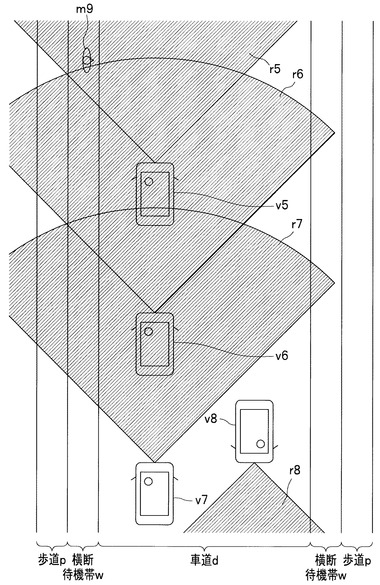
図8は、歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。図8の状況においては、車両v5から車両v8の、4台の車両vが走行している。車両v5から車両v8にそれぞれ搭載された人検出手段2aから人検出手段2dの検出範囲rを、ハッチングを施した扇形の検出範囲r5から検出範囲r8で示す。同一車線を走行中の、車両v5に搭載された人検出手段2aの検出範囲r5と、車両v6に搭載された人検出手段2bの検出範囲r6と、車両v7に搭載された人検出手段2cの検出範囲r7が横断待機帯w上で重なっており、隙間なくいずれかの車両vが横断待機帯w上にいる人m9を常に検出している。
【0065】
図9は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。図9に示す、図8の状況下での待機スコアaと待機している時間との関係を示すグラフを見ると、車両v5が人m9を検出している期間が矢印e5によって、車両v6が人m9を検出している期間が矢印e6によって、車両v7が人m9を検出している期間が矢印e7によって示されている。矢印e5と矢印e6とは一部が重なっており、また、矢印e6と矢印e7とは一部が重なっている。各時刻において人m9の待機スコアaの計算を担当する車両v5、車両v6、または車両v7のいずれか一台の人位置及び待機スコア計算手段5が、常に人m9を検出しながら待機スコアaを計算する。時刻t2において人m9の待機スコアaが停車閾値xを超過したため、時刻t2において人m9の手前に位置する車両v7が、人m9の手前で安全に停車可能であれば、停車する。そして、人位置及び待機スコア計算手段5は、人m9の待機スコアaを消去する(図4のステップS18)。なお、停車の際の処理手順の詳細については後述する。
【0066】
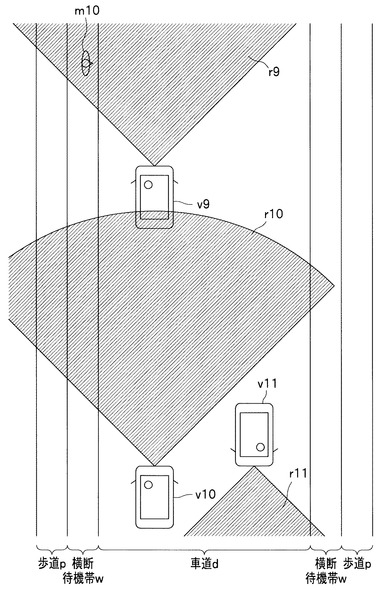
図10は、歩行者横断支援車両システムを搭載した車両が走行している環境を示す他の平面図である。図10の状況においては、車両v9から車両v11の、3台の車両vが走行している。車両v9から車両v11にそれぞれ搭載された人検出手段2eから人検出手段2gの検出範囲rを、ハッチングを施した扇形の検出範囲r9から検出範囲r11で示す。同一車線を走行中の、車両v9に搭載された人検出手段2eの検出範囲r9と、車両v10に搭載された人検出手段2fの検出範囲r10は、横断待機帯w上で重なっておらず、横断待機帯w上にいる人m10を検出できる時間と検出できない時間がある。
【0067】
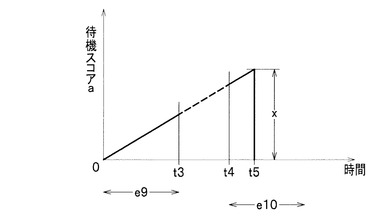
図11は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。図11に示す、図10の状況下での待機スコアaと待機している時間との関係を示すグラフを見ると、車両v9が人m10を検出している期間が矢印e9によって、車両v10が人m10を検出している期間が矢印e10によって示されている。矢印e9と矢印e10は重なっておらず、時刻t3から時刻t4の間は横断待機帯w上にいる人m10を検出できない。しかし、人m10を検出できない間も、前述した図4に示す人位置及び待機スコア計算手段5の処理により、待機スコアaを計算する。時刻t5において人m10の待機スコアaが停車閾値xを超過したため、時刻t5において人m10の手前に位置する車両v10が、人m10の手前で安全に停車可能であれば、停車する。そして、人位置及び待機スコア計算手段5は、人m10の待機スコアaを消去する。なお、停車の際の処理手順の詳細については後述する。
【0068】
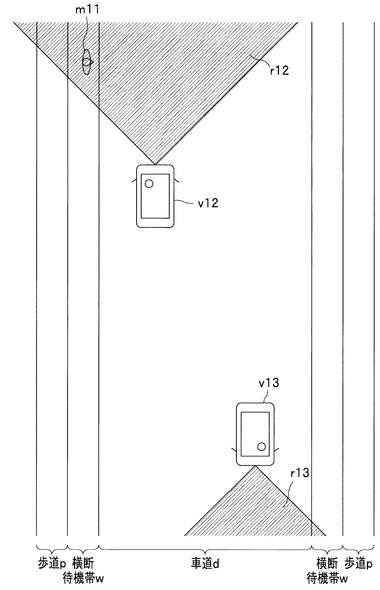
図12は、歩行者横断支援車両システムを搭載した車両が走行している環境を示すさらに他の平面図である。図12の状況においては、車両v12と車両v13の、2台の車両vが走行している。車両v12及び車両v13にそれぞれ搭載された人検出手段2h及び人検出手段2iの検出範囲rを、ハッチングを施した検出範囲r12及び検出範囲r13で示す。横断待機帯w上にいる人m11を検出できる車両vは車両v12のみであり、人m11を検出できない時間が長い。
【0069】
図13は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すさらに他のグラフである。図中の矢印が期間を示す。図13に示す、図12の状況下での待機スコアaと待機している時間との関係を示すグラフを見ると、車両v12が人m11を検出している期間が矢印e12によって示されている。時刻t6以降においては、横断待機帯w上にいる人m11を検出できない。人位置及び待機スコア計算手段5は、人m11を検出できない間も待機スコアaを計算するが、時刻t7において人m11に対する未検出期間がリセット閾値yを超過したため、リセット閾値yを超過した人m11は既に道路横断を完了していると判断し、該当する待機スコアaを消去する。
【0070】
即ち、人検出手段2が検出した人を、その後所定時間検出できないとき、人位置及び待機スコア計算手段5が検出した人の待機スコアをリセットするとよい。
【0071】
次に、停車判断手段10の処理手順について説明する。
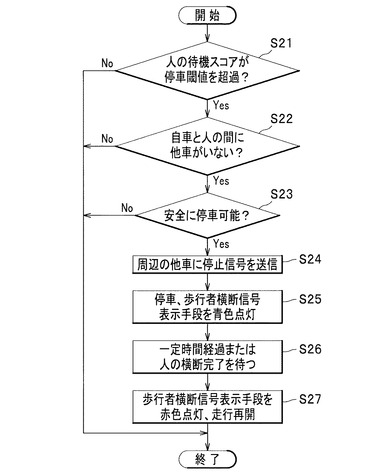
図14は、歩行者横断支援車両システムにおける停車判断手段の処理手順を示すフローチャートである。なお、図14に示すフローチャートの処理手順を、人位置及び待機スコア記憶手段6に記憶されている人mまたはグループg毎に実行する。また、停車判断手段10の処理を実行する車両vの走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達している。
【0072】
最初に、停車判断手段10は、人位置及び待機スコア記憶手段6から人mまたはグループgの待機スコアaを取得し、停車閾値xを超過しているか否かを判断する(ステップS21)。待機スコアaが停車閾値xを超過していた場合には(ステップS21,Yes),ステップS22に進む。一方で、超過していなかった場合には(ステップS21,No)、図14に示すフローチャートの処理を終了し、次に人検出手段2が検出した人mまたはグループgに対して図14に示すフローチャートの処理手順を開始する。
【0073】
次に、停車判断手段10は、停車判断手段10を搭載した自車vと対象としている人mまたはグループgの間の自車線上に、他車vが存在するか否かを判断する(ステップS22)。これは、複数の車両vが走行していた場合に、人mまたはグループgが道路を安全に横断可能とするため、車両vを適切な位置に停車させるために行うものである。即ち、自車vと人mまたはグループgの間の自車線上に他車vが存在する場合は、人mまたはグループgの手前に他車vが停車可能なスペースを空けて自車vが停車しなければならない。
【0074】
そこで、本実施形態では、人mまたはグループgに近い車両vから順番に停車位置hを決定していくことで、当該動作を実現する。よって、他車位置記憶手段7から他車位置を取得し、自車vと、人mまたはグループgとの間の自車線上に他車vが存在するか否かを判断する。自車vと、人mまたはグループgとの間の自車線上に他車vが存在する場合には(ステップS22,No)、図14に示すフローチャートの処理を終了し、停車信号解析手段11が後述する図15に示すフローチャートの処理によって停車位置hを決定する。
【0075】
自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合にはステップS22,Yes)、自車vが安全に停車可能か否かを判断する(ステップS23)。ステップS23において、具体的には、人位置及び待機スコア記憶手段6から人mまたはグループgの位置情報を、自車位置記憶手段8から自車vの位置情報を、道路地図記憶手段9から自車vの周辺の道路地図を取得し、自車vが事前に設定した安全に停車可能な減速度の範囲内で、かつ人mまたはグループgの手前の位置で、かつ交差点などの停車禁止場所を避けて、安全に停車可能か否かを判断する。
【0076】
停車判断手段10は、安全に停車することが不可能だと判断された場合には(ステップS23,No)、図14に示すフローチャートの処理を終了し、自車vは人mまたはグループgの手前で停車することなく通過する。
【0077】
停車判断手段10は、安全に停車可能だと判断されて停車位置hが決定した場合には(ステップS23,Yes)、周辺の他車vに停車信号を送信する(ステップS24)。即ち、自車vの停車位置hを、通信手段4を用いて自車vから一定の距離内(例えば100メートル以内)にいる他車vに送信する。自車vの停車位置hを受信した他車vに搭載された停車信号解析手段11aは、自車vと衝突しない他車vの停車位置hを、後述する図15に示すフローチャートの処理によって決定する。
【0078】
その後、自車vは停車位置hで停車し、歩行者横断信号表示手段13を青色に点灯する(ステップS25)。具体的には、停車判断手段10が走行制御手段12に対して停車指令を出すことで、自車vを停車位置hで停車させる。同時に、停車判断手段10が停車指令を出し、かつ走行制御手段12が自車vを停車状態に制御している場合には、人mが道路を安全に横断可能として、歩行者横断信号表示手段13を青色点灯することで人mに横断可能であることを伝達する(ステップS25を実行している場合は自車vと人mまたはグループgの間の自車線上に他車vは存在しない)。なお、停車判断手段10が車両の停車を確認する方法としては、走行制御手段12から信号を受信して判断してもよいし、自社位置記憶手段8の停車位置から判断してもよい。
【0079】
そして、一定時間(所定時間)の経過または人の横断完了を待つ(ステップS26)。具体的には、自車vが停車して歩行者横断信号表示手段13を青色点灯した後、一定時間(所定時間)が経過した場合、あるいは人mが道路の横断を完了した場合の少なくともどちらか一方では、自車vの走行を再開するために、歩行者横断信号表示手段13を青色点滅することで人mに一定時間(所定時間)内に自車vが走行を開始することを伝達する。
【0080】
ステップS26において、停車判断手段10は、人mが道路の横断を完了を判断する際、人位置及び待機スコア計算手段5が計算した人mの絶対的な位置と、道路地図記憶手段9が持つ地図情報とを利用して判断する。具体的には、人位置及び待機スコア計算手段5は、人検出手段2が検出した人mの相対的な位置と、自車位置検出手段3が検出した自車vの絶対的な位置を用いて、人mの絶対的な位置を計算している。このため、人mの位置が、車道上にいる場合は「横断中」、歩道上あるいは横断待機帯上にいる場合は「横断完了」と判断する。すなわち、「横断中」から「横断完了」への切り替わりが判断されると、人mが道路の横断を完了したと判断する。
【0081】
道路地図記憶手段11に記憶されている道路地図には、前述のとおり、1つ目は、絶対情報である座標値によって歩道・横断待機帯の位置が指定される地図表現の場合、2つ目は、路肩から何メートルが横断待機帯で、何メートルが歩道、といった、路肩からの相対的な地図表現の場合がある。従って、1つ目の場合には、停車判断手段10は、人mの絶対的な位置が、地図上で歩道上あるいは横断待機帯上に相当するか否かを判断する。2つ目の場合には、人mの絶対的な位置で地図を参照することで、当該位置で路肩から何メートルが歩道・横断待機帯かの情報を取得し、その後、例えば特開平6−266828号公報「車輌用車外監視装置」などの公知の技術によって検出された路肩の位置と、人mの位置を相対的に比較することで、歩道上あるいは横断待機帯上に相当するか否かを判断する。
【0082】
歩行者横断信号表示手段13を青色点滅してから事前に設定した一定時間(所定時間)が経過した後、停車判断手段10は、歩行者横断信号表示手段を赤色に点灯し、自車vの走行を再開する(ステップS27)。すなわち、走行を再開するときには、前述のとおり、停車判断手段10は、自車vの走行中は、歩行者横断信号表示手段13に赤色点灯の指令をすることで人mに道路の横断が危険であることを伝達する。以上、図14に示すフローチャートが、停車判断手段10の処理手順である。
【0083】
続いて、停車信号解析手段11の処理手順について説明する。
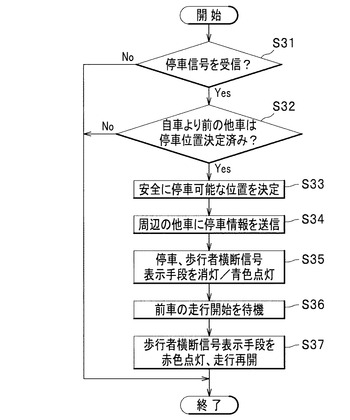
図15は、歩行者横断支援車両システムにおける停車信号解析手段の処理手順を示すフローチャートである。なお、停車判断手段10と同じく、停車信号解析手段11の処理を実行する車両vの走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達している。
【0084】
最初に、停車信号解析手段11は、停車信号を受信したか否かを判定する(ステップS31)。具体的には、通信手段4を用いて自車vから一定の距離内(例えば100メートル以内)にいる他車vの停車位置hの情報を受信する。この他車vの停車位置hの情報は、図14に示す停車判断手段10のステップS24において送信されたものである。他車vの停車位置hの情報を受信した場合には(ステップS31,Yes)、ステップS32に進む。一方で、他車vの停車位置hを受信しなかった場合には(ステップS31,No)、図15に示すフローチャートの処理を終了する。
【0085】
次に、停車信号解析手段11は、自車vより前の他車v、即ち自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hが決定済みか否かを、通信手段4を用いて確認する(ステップS32)。これは、ステップS22と同じく、人mまたはグループgに近い車両vから順番に停車位置hを決定していくためである。自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hが未決定の場合には(ステップS32,No)、図15に示すフローチャートの処理を終了し、再度、図15に示すフローチャートの処理を実行しながら、自車vと人mまたはグループgの間の自車線上に存在する他車vの停車位置hが決定して停車位置hが送信されるのを待つ。
【0086】
停車信号解析手段11は、自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hが決定済みの場合には(ステップS32,Yes)、自車vが安全に停車可能な停車位置hを決定する(ステップS33)。すなわち、自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hは決定済みであるため、その後方に位置する自車vの停車位置hを決定する。具体的には、人位置及び待機スコア記憶手段6から人mまたはグループgの位置を、自車位置記憶手段8から自車vの位置を、道路地図記憶手段9から自車vの周辺の道路地図を取得し、ステップS32で取得した他車vの停車位置hの後方で、かつ交差点などの停車禁止場所を避けて、自車vの停車位置hを決定する。
【0087】
ただし、自車vと人mまたはグループgの間の自車線上には他車vが存在せず、自車vとは反対車線にのみ他車vが存在する場合には、自車vが事前に設定した安全に停車可能な減速度の範囲内で、かつ人mまたはグループgの手前の位置で、かつ交差点などの停車禁止場所を避けて、自車vの停車位置hを決定する。
【0088】
停車信号解析手段11は、自車vの停車位置hが決定した後、通信手段4を用いて自車vから一定の距離内(例えば100メートル以内)にいる他車v(周辺の他車v)に、自車vの停車位置hを送信する(ステップS34)。自車vの停車位置hを受信した他車vに搭載された停車信号解析手段11aは、自車vと衝突しない他車vの停車位置hを、図15に示すフローチャートの処理によって人mまたはグループgに近い車両vから順番に決定する。
【0089】
その後、停車信号解析手段11は、自車vは停車位置hで停車する。停車信号解析手段11が走行制御手段12に対して停車指令を出すことで、自車vを停車位置hで停車させる。同時に、停車信号解析手段11が停車指令を出し、かつ走行制御手段12が自車vを停車状態に制御し、かつ自車vと人mまたはグループgの間の自車線上に他車vが存在する場合には、自車vの停車位置hにおける反対車線を他車vが走行中である可能性を考慮して、歩行者横断信号表示手段13を消灯する(ステップS35)。
【0090】
それ以外の場合、即ち、停車信号解析手段11が停車指令を出し、かつ走行制御手段12が自車vを停車状態に制御し、かつ自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合には、人mが道路を安全に横断可能として、歩行者横断信号表示手段13を青色点灯することで人mに横断可能であることを伝達する。
【0091】
停車信号解析手段11は、自車vが停車して歩行者横断信号表示手段13を消灯または青色点灯した後、自車vの前方に停車している他車v(前車)の走行開始を待機する(ステップS36)。なお、自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合(歩行者横断信号表示手段13を青色点灯している場合)には、反対車線上で人mまたはグループgの手前に停車している他車vの走行開始を待機する。また同じく、自車vと、人mまたはグループgとの間の自車線上に他車vが存在しない場合には、反対車線上で人mまたはグループgの手前に停車している他車vが走行を再開するために歩行者横断信号表示手段13を青色点滅させる(ステップS26)のと同時に、歩行者横断信号表示手段13を青色点滅することで人mに一定時間(所定時間)内に自車vが走行を開始することを伝達する。
【0092】
その後、停車信号解析手段11は、自車vの前方に停車している他車vの走行開始に従い、歩行者横断信号表示手段13を赤色に点灯し、自車vの走行を再開する(ステップS37)。なお、自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合(歩行者横断信号表示手段13を青色点灯している場合)には、反対車線上で人mまたはグループgの手前に停車している他車vの走行開始に従い、自車vの走行を再開する。また、前述のとおり、自車vの走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達する。以上、図15に示すフローチャートが、停車信号解析手段11の処理手順である。もって、図3に示した歩行者横断支援車両システム1を搭載した車両vの運用の実施形態を実現する。
【0093】
<変形例>
図16は、歩行者横断支援車両システムの変形例となる構成を示すブロック図である。本発明の実施例となる歩行者横断支援車両システム1の変形例の構成について、図16を参照して説明する。変形例においても、歩行者横断支援車両システム1は、自律移動車、乗用車などの車両vに搭載され、当該車両vが走行中の道路を、歩行者や自転車に乗った人などの、人mが安全に横断することを支援するものである。ただし、歩行者横断支援車両システム1の変形例の構成は、前述の歩行者横断支援車両システム1とほぼ同じであるが、人検出手段2が車両v上に搭載されていない点が異なる。人検出手段2の代わりに、横断待機帯wや歩道pなどに設置された人検出手段2zがその機能を有する。それ以外の構成要素は、前述の歩行者横断支援車両システム1と同じであるため、その詳細な説明は省略する。
【0094】
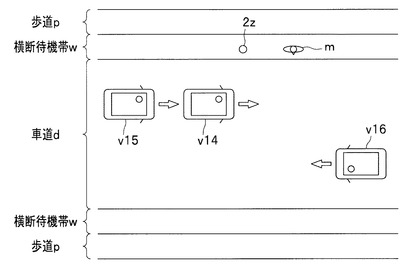
図17は、歩行者横断支援車両システムの変形例の運用の形態を示す平面図である。図17を参照して、歩行者横断支援車両システム1の変形例を搭載した車両v14から車両v16の、3台の車両vが走行している環境を示す。
【0095】
歩行者横断支援車両システム1の変形例の運用の形態においては、人検出手段2zが環境中に設置されている。人検出手段2zは、具体的には道路上の電柱などに設置されたカメラなどを用いて人を検出する手段であり、監視カメラなどで用いられている公知の技術によって構成される。人検出手段2zは、検出した人mの位置情報を、通信手段4を介して車両vに搭載された歩行者横断支援車両システム1の人位置及び待機スコア計算手段5に送信する。以降は前述した歩行者横断支援車両システム1と同様の手順により、歩行者横断支援車両システム1を搭載した車両vの運用の形態を実現する。
【0096】
以上の歩行者横断支援車両システム1の変形例の構成とすることで、車両vに搭載する歩行者横断支援車両システム1の費用を安く抑えることができる。また、道路上に監視カメラが設置されている環境においては、人検出手段2zを新規に設置する必要がないという利点も有する。さらに、道路上に固定された人検出手段2zから人mを検出することにより、移動体である車両vに搭載された人検出手段2から人mを検出する場合と比較して、人mの検出精度が向上するという優れた効果を奏する。
【0097】
本実施形態によれば、横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する車両システムを提供できる。もって、当該車両システムを用いることにより、歩行者と車両の双方にとって、衝突の危険を回避し、安全な移動を可能とする、優れた効果を奏する。
【符号の説明】
【0098】
1 歩行者横断支援車両システム(人横断支援車両システム)
2,2z 人検出手段
3 自車位置検出手段(車両位置検出手段)
4 通信手段
5 人位置及び待機スコア計算手段(人位置・待機スコア計算手段)
6 人位置及び待機スコア記憶手段(人位置・待機スコア記憶手段)
7 他車位置記憶手段
8 自車位置記憶手段
9 道路地図記憶手段
10 停車判断手段
11 停車信号解析手段
12 走行制御手段
13 歩行者横断信号表示手段(人横断信号表示手段)
【技術分野】
【0001】
本発明は、自律移動車、乗用車などの車両における、歩行者が任意の場所で道路を安全に横断することを支援する歩行者横断支援車両システム及び歩行者横断支援方法に係るものである。
【背景技術】
【0002】
従来、車両において、車両の周囲に存在する歩行者を含む障害物を検出し、そして、当該車両と障害物との衝突の危険性があると判断された場合には、車両を停車する、あるいは車両の運転者へ警告を発する衝突回避支援用の装置が開示されている(例えば、特許文献1参照)。
【0003】
また、道路上に予め設置された横断歩道において、歩行者の安全な横断を支援する装置が開示されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−105891号公報
【特許文献2】特開2002−175590号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術によれば、歩行者が車道に飛び出した際の歩行者と車両との衝突の防止や、道路上に予め設置された横断歩道における歩行者の安全な横断の支援が実現できる。
【0006】
しかしながら、横断歩道が設置されていない道路においては、歩行者の飛び出しに伴って車両が急ブレーキをかけるような状況を避け、歩行者が安全に車道を横断可能とすることは、従来技術では実現困難であった。
【0007】
横断歩道が設置されていない道路においては、横断歩道が存在せず、かつ歩行者用信号機も存在しないことにより、歩行者の安全な道路横断が困難となる。即ち、道路側に歩行者の横断を支援する設備が存在しないため、歩行者自身が目視などによって走行中の車両を認識し、道路を横断するか否かを判断しなければならない。しかし、歩行者による目視などでの車両の認識には限界があり、特に車両が今後どのように動くかを予測することは困難である。
【0008】
また、道路に横断歩道や歩行者用信号機などの設備を設置すれば歩行者の安全な道路横断が可能となるが、歩行者が希望する任意の場所で道路を安全に横断するためには大量の横断歩道や歩行者用信号機などの設備が必要となり、設備増強の費用が高くなるという問題があった。
【0009】
本発明は、前記の課題を解決するための発明であって、歩行者の安全な道路横断を支援することができる人横断支援車両システム及び人横断支援方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記目的を達成するため、本発明では、車両自身に歩行者用信号機の機能を持たせている。歩行者または自転車に乗った人などに対しての危険源となる車両自身が歩行者用信号機を持つため、危険源の近傍には必ず歩行者用信号機が存在することを保証できる。さらに、車両自身が歩行者用信号機の機能を持つことにより、車両が今後どのように動くかという情報を人に通知することが可能になる利点もある。
【0011】
本発明の人横断支援車両システムは、人が任意の場所で道路を安全に横断することを支援する車両システムであって、衝突回避支援のために横断候補者である人を検出する人検出手段と、自車位置検出手段と、人検出手段及び自車位置検出手段からの位置情報を基に、横断候補者の人の位置情報を人位置として計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算の結果を人位置・待機スコア記憶手段(例えば、人位置及び待機スコア記憶手段6)に記憶する人位置・待機スコア計算手段(例えば、人位置及び待機スコア計算手段5)と、横断候補者の人位置及び前記待機スコアに基づいて、人が道路を安全に横断可能とするために車両を停車させるか否かを判断する停車判断手段と、前記停車判断手段が車両を停車させると判断した場合に車両を停車させる機能を持つ走行制御手段と、人が道路を安全に横断可能か否かの旨の情報を表示する人横断信号表示手段(例えば、歩行者横断信号表示手段13)と、を備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、歩行者の安全な道路横断を支援することができる。
【図面の簡単な説明】
【0013】
【図1】歩行者横断支援車両システムの構成を示すブロック図である。
【図2】歩行者横断支援車両システムを搭載した車両を示す側面方向から見た断面図である。
【図3】歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。
【図4】歩行者横断支援車両システムにおける人位置及び待機スコア計算手段の処理手順を示すフローチャートである。
【図5】歩行者横断支援車両システムにおける人検出手段が人を検出している状態を示す平面図である。
【図6】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。
【図7】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。
【図8】歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。
【図9】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。
【図10】歩行者横断支援車両システムを搭載した車両が走行している環境を示す他の平面図である。
【図11】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。
【図12】歩行者横断支援車両システムを搭載した車両が走行している環境を示すさらに他の平面図である。
【図13】歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すさらに他のグラフである。
【図14】歩行者横断支援車両システムにおける停車判断手段の処理手順を示すフローチャートである。
【図15】歩行者横断支援車両システムにおける停車信号解析手段の処理手順を示すフローチャートである。
【図16】歩行者横断支援車両システムの変形例となる構成を示すブロック図である。
【図17】歩行者横断支援車両システムの変形例の運用の形態を示す平面図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について、図面を参照しながら詳細に説明する。
図1は、歩行者横断支援車両システムの構成を示すブロック図である。歩行者横断支援車両システム1(人横断支援車両システム)は、自律移動車、乗用車などの車両vに搭載され、当該車両vが走行中の道路を、歩行者や自転車に乗った人などの、人mが安全に横断することを支援するものである。なお、当該車両vを「自車v」あるいは「他車v」とも記述する。
【0015】
歩行者横断支援車両システム1は、人検出手段2、自車位置検出手段3(車両位置検出手段)、通信手段4、人位置及び待機スコア計算手段5(人位置・待機スコア計算手段)、人位置及び待機スコア記憶手段6(人位置・待機スコア記憶手段)、他車位置記憶手段7、自車位置記憶手段8、道路地図記憶手段9、停車判断手段10、停車信号解析手段11、走行制御手段12、歩行者横断信号表示手段13(人横断信号表示手段)を含んで構成する。
【0016】
続いて、以上の構成要素を個別に説明する。
人検出手段2は、自車vの進行方向に存在する歩行者や自転車に乗った人などの、人mの検出手段であり、人mの自車vからの相対的な位置情報を取得する。また、実施形態によっては、相対的な位置情報だけでなく、予め記憶された動作パターン、例えば手を挙げるなどのジェスチャー(動作行動)をも認識する。なお、そのための具体的な検出方法/装置は既に公知の技術であり、一般道路上での人mの検出手段には、例えば特開2002−75595号公報「車両の安全運転支援システム」により提案されている技術を用いるとよい。また、相対的な位置の取得には、例えば特開2005−234694号公報「車外監視装置」により提案されている技術を用いるとよい。また、手を挙げるなどのジェスチャーの認識には、例えばProject Natal(http://www.xbox.com/projectnatal/)により提案されている技術を用いるとよい。
【0017】
自車位置検出手段3は、自車vの現在位置(地上での絶対的な位置)を取得する。なお、そのための具体的な検出方法/装置は既に公知の技術であり、例えば、GNSS(Global Navigation Satellite System)の一種である、RTK−GPS(Real Time Kinematic Global Positioning System)を用いる。あるいは、書籍「ビークル」(著者:金井 喜美雄 ほか、出版社:コロナ社、出版年:2003年、ISBN:978-4-339-03363-2)に記載されている、ランドマークを用いた自己位置推定技術を用いる。
【0018】
通信手段4は、自車vと、自車vの周辺にいる他車vとの間で通信を行う。なお、そのための具体的な検出方法/装置は既に公知の技術であり、例えば、ITS情報通信システム推進会議(http://www.itsforum.gr.jp/)が策定した「5.8GHz帯を用いた車々間通信システムの実験用ガイドライン(ITS FORUM RC-005)」や「700MHz帯を用いた運転支援通信システムの実験用ガイドライン(ITS FORUM RC-006)」、あるいはIEEE(http://www.ieee.org/)が策定した「IEEE802.11p」や「IEEE1609」を用いる。また、自車vの周辺にいる他車vとの通信のためには、位置ベースでのルーティング技術が必要であり、当該技術はGeo-Routingと呼ばれている公知の技術である。通信内容の詳細については後述する。
【0019】
人位置及び待機スコア計算手段5は、人検出手段2が取得した人m(横断候補者)の自車vからの相対的な位置情報と、自車位置検出手段3が取得した自車vの絶対的な位置情報を用いて、人mの絶対的な位置を計算する。また、人mが道路を横断するために待機している時間を計測することで、待機スコアaと呼ぶ待機状態の指標を計算する。また、本実施形態では、人検出手段2で示したジェスチャーの認識判定は、人位置及び待機スコア計算手段5が有しているものとして説明する。この際には、ジェスチャーの動作パターンは、人位置及び待機スコア記憶手段6に記憶しておくとよい。なお、処理手順の詳細については図4を参照して後述する。
【0020】
人位置及び待機スコア記憶手段6は、人位置及び待機スコア計算手段5が計算した、人mの絶対的な位置及び待機スコアaを記憶する。人mの絶対的な位置及び待機スコアaは、他車vに搭載された人位置及び待機スコア計算手段5a(図示せず)が計算した結果を、通信手段4を介して取得したものである場合もある。
【0021】
他車位置記憶手段7は、他車vに搭載された自車位置検出手段3a(図示せず)が取得した他車vの現在位置を、通信手段4を介して取得して記憶する。
【0022】
自車位置記憶手段8は、自車vに搭載された自車位置検出手段3が取得した自車の現在位置を記憶する。
【0023】
道路地図記憶手段9は、自車vが走行する環境の道路情報が記載された地図(道路地図情報)を記憶する。道路地図記憶手段9が記憶する地図は、カーナビゲーションシステムにおいて用いられている道路地図と同等の地図であり、交差点位置、車線数、一方通行、停車禁止位置などの情報を含む道路地図である。
【0024】
なお、前記に加えて、後述する横断待機帯w、歩道pの位置情報をも含む道路地図を記憶する。横断待機帯w及び歩道pの表現方法は、2通りある。1つ目は、絶対的な座標値によって横断待機帯w及び歩道pの位置が指定される地図表現である。2つ目は、路肩から何メートルが横断待機帯で、何メートルが歩道、といった、路肩からの相対的な地図表現である。具体的には、道路地図情報に、この道路地図上の所定の区間には、車道d(図3参照)から何メートルの領域に横断待機帯w(図3参照)があり、何メートルの領域に歩道pがあることが記載されていてもよいし、道路何号線の区間情報として、横断待機帯wと歩道pの情報を含んでいてもよい。
【0025】
停車判断手段10は、人位置及び待機スコア記憶手段6が記憶する人mの位置及び待機スコアaの情報、他車位置記憶手段7が記憶する他車vの位置情報、自車位置記憶手段8が記憶する自車vの位置情報、道路地図記憶手段9が記憶する道路地図情報を用いて、人mが道路を安全に横断可能とするため、自車vを停車させるか否かを判断する。待機スコアaが、停車閾値xと呼ぶ値を超過している場合には、自車vを停車させる。また、自車vを停車させると判断した場合、自車vが停車するという停車信号を、通信手段4を用いて他車vに搭載された停車信号解析手段11a(図示せず)に送信する。なお、処理手順の詳細については、図14を参照して後述する。
【0026】
停車信号解析手段11は、他車vに搭載された停車判断手段10aから送信された停車信号を受信し、他車位置記憶手段7が記憶する他車vの位置情報、自車位置記憶手段8が記憶する自車vの位置情報、道路地図記憶手段9が記憶する道路地図情報を用いて、自車vの停車位置を決定する。なお、処理手順の詳細については、図15を参照して後述する。
【0027】
走行制御手段12は、自車vを目的地まで走行させる機能と、停車判断手段10または停車信号解析手段11が自車vを停車させると判断した場合に自車vを停車させる機能を持つ。なお、走行機能は、例えば、書籍「ビークル」(著者:金井 喜美雄 ほか、出版社:コロナ社、出版年:2003年、ISBN:978-4-339-03363-2)に記載されている公知の技術を用いる。
【0028】
歩行者横断信号表示手段13は、自車vに搭載され、人mが道路を安全に横断可能か否かの情報を、人mに対して表示する信号機である。停車判断手段10または停車信号解析手段11が自車vを停車させると判断し、かつ走行制御手段12が自車vを停車状態に制御している場合には、人mが道路を安全に横断可能である旨の信号を表示する。そうでない場合には、人mが道路を横断するのは危険である旨の信号を表示する。
【0029】
図2は、歩行者横断支援車両システムを搭載した車両を示す側面方向から見た断面図である。図2を参照して、歩行者横断支援車両システム1を搭載した車両vの、歩行者横断信号表示手段13の実施形態について説明する。
【0030】
歩行者横断信号表示手段13は、ヘッドライトiやテールライトkと同様の電灯であり、LED(Light Emitting Diode)などを用いる。また、歩行者横断信号表示手段13は、車両vの周辺にいる人mから目視しやすい位置に設置する。例えば、車両vのルーフ上の歩道側に設置する。歩行者横断信号表示手段13の電灯の色は、ヘッドライトiやテールライトkとは異なり、例えば、青色点灯と青色点滅と赤色点灯と消灯の各状態を、停車判断手段10または停車信号解析手段11からの指令に応じて表示する機能を持つ。車両vが停車していて、かつ人mが道路を安全に横断可能な場合には、青色点灯することで人mに横断可能であることを伝達する。車両vが停車しているが、一定時間(所定時間)内に走行を開始する場合には、青色点滅することで人mに一定時間(所定時間)内に車両vが走行を開始することを伝達する。車両vが走行している場合、即ち人mが道路を横断するのは危険な場合には、赤色点灯することで人mに道路の横断が危険であることを伝達する。車両vが停車しているが、人mが道路を安全に横断可能か未知な場合には、消灯する。
【0031】
図3は、歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。図3を参照して、歩行者横断支援車両システム1を搭載した車両vの運用の形態について説明する。
【0032】
本発明の実施においては、車道dと歩道pの間に、横断待機帯wと呼ぶ領域を設ける。横断待機帯wは、道路を横断する意思のある人mが待機する場所である。横断待機帯wは、白線などを地面に描くだけで設置可能なため、設備増強の費用は安い。なお、横断待機帯wの有無は、地図情報に含まれており、道路地図記憶手段9が道路地図情報を記憶している。
【0033】
人mが横断候補者として、横断待機帯wで静止したまま事前に設定した一定時間(所定時間)が経過した場合(例えば人mが3メートル以上移動しないまま1分間経過した場合)、あるいは人mが横断待機帯wで手を挙げるなどの所定のジェスチャーを、事前に設定した一定時間(所定時間)行っていた場合の少なくともどちらか一方では、歩行者横断支援車両システム1が人mに道路を横断する意思があると解釈し、人mの手前で車両vを停車させ、歩行者横断信号表示手段13を青色点灯することで人mに横断可能であることを伝達する。
【0034】
例えば、図3に示す車両v1に搭載された歩行者横断支援車両システム1a(図示せず)が人mに道路を横断する意思があると解釈した場合、車両v1は人mの手前の停車位置h1で停車し、歩行者横断信号表示手段13aを青色点灯する。
【0035】
また、歩行者横断支援車両システム1aは、車両v1が停車するという情報を、通信手段4を用いて車両v1から一定の距離内(例えば100メートル以内)にいる他車vに送信する。当該情報を受信することで、車両v1と同車線を走行中の車両v2は、車両v1の後方に停車し、歩行者横断信号表示手段13bを消灯する。また車両v1の反対車線を走行中の車両v3は、人mの手前の停車位置h2で停車し、歩行者横断信号表示手段13cを青色点灯する。
【0036】
車両vが停車して歩行者横断信号表示手段13を青色点灯した後、人mが道路の横断を完了した場合、あるいは事前に設定した一定時間(所定時間)が経過した場合の少なくともどちらか一方では、歩行者横断支援車両システム1が車両vの走行を再開するために、歩行者横断信号表示手段13を青色点滅することで人mに一定時間内に車両vが走行を開始することを伝達する。なお、車両vが停車し、かつ歩行者横断信号表示手段13が消灯していた場合には、当該条件時に歩行者横断信号表示手段13を青色点滅することはない。
【0037】
車両vが走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達する。
【0038】
図4は、歩行者横断支援車両システムにおける人位置及び待機スコア計算手段の処理手順を示すフローチャートである。図4に示すフローチャートを参照して、人位置及び待機スコア計算手段5の処理手順について説明する。なお、人位置及び待機スコア計算手段5は、図4に示すフローチャートの処理手順を一定時間(所定時間)間隔でループ実行する。ループ実行の時間間隔は、人検出手段2が人mを検出する周期と等しくする。
【0039】
最初に、人位置及び待機スコア計算手段5は、人検出手段2が自車vの進行方向に存在する歩行者や自転車に乗った人などの、人mを検出しているかどうかを判断する(ステップS11)。人検出手段2は、1人以上(複数の人mを検出する場合もある)の人mを検出している場合には(ステップS11,Yes)、ステップS12に進む。一方で、人mを1人も検出していない場合には(ステップS11,No)、ステップS14に進む。
【0040】
次に、人位置及び待機スコア計算手段5は、人検出手段2が人mを検出している場合に、検出した人mに道路を横断する意思があるかどうかを判定するために、人mが横断待機帯wで静止または手を挙げるジェスチャーを行っているかどうかを判断する(ステップS12)。複数の人mを検出している場合には、それぞれの人mにおいて静止または前記ジェスチャーを行っているかどうかを判断する。当該判断を行うために、人検出手段2が検出した、人mの自車vからの相対的な位置情報を取得する。さらに実施形態によっては、人検出手段2が検出した、人mがとっているジェスチャーの姿勢情報をも取得する。
【0041】
また、人位置及び待機スコア計算手段5は、自車位置検出手段3が取得した自車vの絶対的な位置情報を取得する。まず、人mの自車vからの相対的な位置情報と、自車vの絶対的な位置情報を用いて、人mの絶対的な位置を計算する。また、道路地図記憶手段9から、横断待機帯wの位置を取得する。これによって、人mが横断待機帯w上に位置しているか否かを判断する。
【0042】
次に、人mに道路を横断する意思があるかどうかの判定は、具体的には、例えば、人mが横断待機帯w上で3メートル以上移動しないまま1分間経過した場合、あるいは人mが横断待機帯w上で手を挙げるジェスチャーの姿勢をとったまま1分間経過した場合の少なくともどちらか一方では、人mに道路を横断する意思があると判定することで行う。なお、判定基準となるジェスチャーの動作パターンは、人位置及び待機スコア記憶手段6に予め記憶されている。
【0043】
ただし、当該判定のための各種閾値(上記の「3メートル」、「1分間」)は、これに限定されるものではない(「5メートル」、「30秒間」などでもよい)。道路を横断する意思があると判定された人mが1人以上いた場合には(ステップS12,Yes)、ステップS13に、1人もいなかった場合には(ステップS12,No)、ステップS14に進む。
【0044】
続いて、道路を横断する意思があると判定された人mが2人以上いた場合には、待機している人mのグルーピングを行う(ステップS13)。これは、複数人が道路横断のために待機していた場合に、車両vを適切な位置に停車させるために行うものである。人検出手段2が検出した人mの位置情報を用いて、複数の人mそれぞれの間の距離を計算する。人mの間の距離が事前に設定した一定距離(車両vの全長より数メートル以上長い距離とする)以下だった場合には、該当する人mの集団を1つのグループgとし、車道dに沿ったグループgの両端位置を計算する。例えば、所定の条件として人mの間の距離が7メートル以下だった場合には、1つのグループgとする。ここで図5を参照して、具体例を説明する。
【0045】
図5は、歩行者横断支援車両システムにおける人検出手段が人を検出している状態を示す平面図である。図5には、自車v4に搭載された人検出手段2(図1参照)が、人m1から人m8の8人を検出している状態を示す。人m1から人m5の5人に関しては、横断待機帯w上で所定時間以上静止しており、道路を横断する意思があるとステップS12で判定される。一方で人m6から人m8の3人に関しては、横断待機帯w上にいないため、道路を横断する意思はないとステップS12で判定される。
【0046】
この場合、道路を横断する意思があると判定されている人m1から人m5の5人に関して、グルーピングを行う。図5の例では、人mの間の距離が7メートル以下だった場合には、1つのグループgとする。人m1と人m2の間の距離、及び人m2と人m3の間の距離は、7メートル以下であるため、人m1と人m2と人m3の3人を1つのグループg1としてまとめる。
【0047】
その後、グループg1に属する両端の人mの、車道dの進行方向に沿った位置cを計算する。図5の例では、グループg1を表す矢印の両端の位置、即ち人m1と人m3の車道dの進行方向に沿った位置c1及び位置c2を計算する。一方で人m3と人m4の間の距離、及び人m4と人m5の間の距離は、いずれも7メートルを超過している。よって、人m4と人m5に関しては、グルーピングしない。なお、グループgに属さないとしても、車道dの進行方向に沿った位置cを計算する。人m4に対しては位置c3、人m5に対しては位置c4が求まる。
【0048】
なお、例えば人m3と人m6の間の距離は7メートル以下であるが、人m6は横断待機帯w上におらず、道路を横断する意思はないとステップS12で判定されているため、人m6をグループg1に加えることはない。また、グループgが大きくなりすぎると車両vの停車位置がなくなるため、グループgの最大長を事前に定め、それ以上となる場合には当該位置でグループgを分割することとする。例えば、グループgの最大長を20メートルと設定する。
【0049】
図4に戻り、人位置及び待機スコア計算手段5は、ステップS13の処理の結果について、車車間通信で周辺の人位置の情報を共有する(ステップS14)。即ち、通信手段4を用いて周辺の車両vと周辺の人位置を共有する。自車vから一定の距離内(例えば100メートル以内)にいる他車vに対して、道路を横断する意思があるとステップS12で判定されているグループgまたは人m自身の、車道dの進行方向に沿った位置cの情報を送信する。また同時に、自車vから一定の距離内(例えば100メートル以内)にいる他車vから、当該情報を受信する。これにより、自車vが検出できていない人mが自車vの周辺にいたとしても、他車vが検出した情報を用いて補完することが可能である。
【0050】
さらに、人位置及び待機スコア計算手段5は、図4に示すフローチャートの処理手順を一定時間(所定時間)間隔でループ実行しているため、過去一定の時間以内に検出した当該情報をも共有する。例えば、現時刻から1分前までに検出した当該情報を共有する。過去一定の時間以内に検出した当該情報を共有する場合には、1ループ前のステップS16で求めた、待機スコアaと呼ぶ待機状態の指標の情報も共有する。待機スコアaは、重複を除いた個々の人mまたはグループgに対して、それぞれ1つの待機スコアaが計算されている。
【0051】
次に、人位置及び待機スコア計算手段5は、ステップS14で取得した人mの車道dの進行方向に沿った位置cの対応付け(人位置を対応付け)を行う(ステップS15)。この対応付けには2つの意味がある。1つ目は、同一の人mを複数の車両vで検出している場合、あるいは過去に検出した人mと同一の人mを検出している場合があるため、同一の人mを重複して扱わないようにするための対応付けである。2つ目は、個々の人mまたはグループgに対して、待機スコアaと呼ぶ待機状態の指標を、どの車両vが計算するかの担当を決定するための対応付けである。
【0052】
まず、人mの重複を回避するため、取得した複数の人mの位置cのそれぞれの間の距離を計算し、事前に設定した一定距離(人検出手段2の検出位置誤差程度の距離とする)以下だった場合には、該当する複数の人mは同一の人mであるとする。例えば、複数の人mの位置cのそれぞれの間の距離が0.5メートル以下であった場合には、同一の人mであるとする。なお、この際に、過去に検出した人mと同一であった場合には、過去に検出した人mまたはグループgに対応付けられている待機スコアaの情報を引き継ぐ。過去に検出しておらず、現時刻で初めて検出した人mまたはグループgである場合には、待機スコアaの初期値は「0」(ゼロ)とする。
【0053】
続いて、個々の人mまたはグループgに対して、待機スコアaを計算する担当の車両vを決定する。個々の人mまたはグループgを、現時刻において1つの車両vのみが検出している場合には、当該車両vが待機スコアaを計算する担当となる。個々の人mまたはグループgを、現時刻において複数の車両vが検出している場合には、例えば、それぞれ個々の人mまたはグループgに最も近い車両vが待機スコアaを計算する担当となる。一方で、個々の人mまたはグループgを現時刻においてどの車両vも検出していない場合には、例えば、1ループ前に担当していた車両vが待機スコアaを計算する担当を引き継ぐ。ただし、待機スコアaを計算する担当の決め方は、これに限定されるものではない。
【0054】
ここで、個々の人mまたはグループgの待機スコアaを計算する担当の車両vが、それぞれの人mまたはグループgが道路を横断するために待機している時間を計測することで、待機スコアaを計算する(ステップS16)。道路を横断する意思がある、即ち道路横断のために待機しているとステップS12で判定されている個々の人mまたはグループgに対して、待機している時間の経過とともに待機スコアaを増加させる。即ち、現時刻で初めて検出した人mまたはグループgである場合には、待機スコアaの初期値である「0」(ゼロ)であり、また過去に検出した人mまたはグループgと同一の人mまたはグループgを検出した場合には、1ループ前から引き継いだ待機スコアaに対して、ループ実行の時間間隔分、待機スコアaを増加させる。
【0055】
図6は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。待機スコアaの増加は、例えば図6のグラフに示すように、待機スコアaを待機している時間に比例させる。比例定数(図6のグラフの傾き)は任意の値でよく、例えば比例定数を「1」、時間の単位を秒とすれば、10秒間待機していたときの待機スコアaは「10」となる。また、グループgに属する人mの数に応じて比例定数を変化させてもよい。
【0056】
図7は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。例えば図7のグラフに示すように、最初は1人の人mが待機していたが、時刻t1に1人増えて2人のグループgとなった場合、比例定数を2倍にしてもよい。これによって、多くの人mが道路横断のために待機している場合、待機スコアaの増加を速くし、車両vが停車するまでの待ち時間を短くすることができる。
【0057】
図4に戻り、次に、人位置及び待機スコア計算手段5は、人mまたはグループgを長時間にわたってどの車両vも検出していない場合に備え、未検出期間がリセット閾値yと呼ぶ値を超過しているか否かを判断する(ステップS17)。
【0058】
人位置及び待機スコア計算手段5は、過去一定の時間以内に検出した人mまたはグループgに対しても、検出していない期間も継続して待機スコアaを計算している。しかし、長時間にわたって人mまたはグループgを検出していない場合、人mまたはグループgが最後に検出された状態のまま待機を続けている保証はない。
【0059】
また、人mまたはグループgを未検出ということは、人mまたはグループgを検出可能な範囲に車両vが存在しないことを意味する。即ち、長時間にわたって人mまたはグループgを検出していない場合、その付近には車両vが走行しておらず、人mまたはグループgは既に道路横断を完了している可能性が高い。
【0060】
よって、長時間にわたって人mまたはグループgを検出していない場合、人mまたはグループgは既に道路横断を完了していると見なすため、最後に人mまたはグループgを検出してから未検出が続いている時間の長さを、個々の人mまたはグループg毎に計測する。そして、未検出期間が事前に設定したリセット閾値yを超過しているか否かを判断する。超過していなかった場合には(ステップS17,No)、ステップS19に進む。
【0061】
未検出期間がリセット閾値yを超過していた場合には(ステップS17,Yes)、該当する人位置を消去する(ステップS18)。即ち、リセット閾値yを超過した人mまたはグループgは既に道路横断を完了していると判断し、該当する位置cと待機スコアaの情報を消去する。
【0062】
最後に、人位置及び待機スコア計算手段5は、通信手段4を用いて、車車間通信で待機スコアaを共有する(ステップS19)。即ち、個々の人mまたはグループgの位置cと待機スコアaの情報を、一定の距離内(例えば100メートル以内)にいる車両vと共有して、人位置及び待機スコア記憶手段6に記憶する。以上、図4に示すフローチャートが、人位置及び待機スコア計算手段5の処理手順である。
【0063】
続いて、図8から図13を参照して、人位置及び待機スコア計算手段5の処理手順の具体例について説明する。図8、図10、及び図12は、歩行者横断支援車両システム1を搭載した車両vが走行している環境の、それぞれ異なる状況を示す平面図である。図9、図11、及び図13は、待機スコアaと人mまたはグループgが道路横断のために待機している時間との関係を示すグラフである。図9のグラフは図8の状況に対応し、図11のグラフは図10の状況に対応し、図13のグラフは図12の状況に対応する。
【0064】
図8は、歩行者横断支援車両システムを搭載した車両が走行している環境を示す平面図である。図8の状況においては、車両v5から車両v8の、4台の車両vが走行している。車両v5から車両v8にそれぞれ搭載された人検出手段2aから人検出手段2dの検出範囲rを、ハッチングを施した扇形の検出範囲r5から検出範囲r8で示す。同一車線を走行中の、車両v5に搭載された人検出手段2aの検出範囲r5と、車両v6に搭載された人検出手段2bの検出範囲r6と、車両v7に搭載された人検出手段2cの検出範囲r7が横断待機帯w上で重なっており、隙間なくいずれかの車両vが横断待機帯w上にいる人m9を常に検出している。
【0065】
図9は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すグラフである。図9に示す、図8の状況下での待機スコアaと待機している時間との関係を示すグラフを見ると、車両v5が人m9を検出している期間が矢印e5によって、車両v6が人m9を検出している期間が矢印e6によって、車両v7が人m9を検出している期間が矢印e7によって示されている。矢印e5と矢印e6とは一部が重なっており、また、矢印e6と矢印e7とは一部が重なっている。各時刻において人m9の待機スコアaの計算を担当する車両v5、車両v6、または車両v7のいずれか一台の人位置及び待機スコア計算手段5が、常に人m9を検出しながら待機スコアaを計算する。時刻t2において人m9の待機スコアaが停車閾値xを超過したため、時刻t2において人m9の手前に位置する車両v7が、人m9の手前で安全に停車可能であれば、停車する。そして、人位置及び待機スコア計算手段5は、人m9の待機スコアaを消去する(図4のステップS18)。なお、停車の際の処理手順の詳細については後述する。
【0066】
図10は、歩行者横断支援車両システムを搭載した車両が走行している環境を示す他の平面図である。図10の状況においては、車両v9から車両v11の、3台の車両vが走行している。車両v9から車両v11にそれぞれ搭載された人検出手段2eから人検出手段2gの検出範囲rを、ハッチングを施した扇形の検出範囲r9から検出範囲r11で示す。同一車線を走行中の、車両v9に搭載された人検出手段2eの検出範囲r9と、車両v10に搭載された人検出手段2fの検出範囲r10は、横断待機帯w上で重なっておらず、横断待機帯w上にいる人m10を検出できる時間と検出できない時間がある。
【0067】
図11は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示す他のグラフである。図11に示す、図10の状況下での待機スコアaと待機している時間との関係を示すグラフを見ると、車両v9が人m10を検出している期間が矢印e9によって、車両v10が人m10を検出している期間が矢印e10によって示されている。矢印e9と矢印e10は重なっておらず、時刻t3から時刻t4の間は横断待機帯w上にいる人m10を検出できない。しかし、人m10を検出できない間も、前述した図4に示す人位置及び待機スコア計算手段5の処理により、待機スコアaを計算する。時刻t5において人m10の待機スコアaが停車閾値xを超過したため、時刻t5において人m10の手前に位置する車両v10が、人m10の手前で安全に停車可能であれば、停車する。そして、人位置及び待機スコア計算手段5は、人m10の待機スコアaを消去する。なお、停車の際の処理手順の詳細については後述する。
【0068】
図12は、歩行者横断支援車両システムを搭載した車両が走行している環境を示すさらに他の平面図である。図12の状況においては、車両v12と車両v13の、2台の車両vが走行している。車両v12及び車両v13にそれぞれ搭載された人検出手段2h及び人検出手段2iの検出範囲rを、ハッチングを施した検出範囲r12及び検出範囲r13で示す。横断待機帯w上にいる人m11を検出できる車両vは車両v12のみであり、人m11を検出できない時間が長い。
【0069】
図13は、歩行者横断支援車両システムにおける待機スコアと人が道路横断のために待機している時間との関係を示すさらに他のグラフである。図中の矢印が期間を示す。図13に示す、図12の状況下での待機スコアaと待機している時間との関係を示すグラフを見ると、車両v12が人m11を検出している期間が矢印e12によって示されている。時刻t6以降においては、横断待機帯w上にいる人m11を検出できない。人位置及び待機スコア計算手段5は、人m11を検出できない間も待機スコアaを計算するが、時刻t7において人m11に対する未検出期間がリセット閾値yを超過したため、リセット閾値yを超過した人m11は既に道路横断を完了していると判断し、該当する待機スコアaを消去する。
【0070】
即ち、人検出手段2が検出した人を、その後所定時間検出できないとき、人位置及び待機スコア計算手段5が検出した人の待機スコアをリセットするとよい。
【0071】
次に、停車判断手段10の処理手順について説明する。
図14は、歩行者横断支援車両システムにおける停車判断手段の処理手順を示すフローチャートである。なお、図14に示すフローチャートの処理手順を、人位置及び待機スコア記憶手段6に記憶されている人mまたはグループg毎に実行する。また、停車判断手段10の処理を実行する車両vの走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達している。
【0072】
最初に、停車判断手段10は、人位置及び待機スコア記憶手段6から人mまたはグループgの待機スコアaを取得し、停車閾値xを超過しているか否かを判断する(ステップS21)。待機スコアaが停車閾値xを超過していた場合には(ステップS21,Yes),ステップS22に進む。一方で、超過していなかった場合には(ステップS21,No)、図14に示すフローチャートの処理を終了し、次に人検出手段2が検出した人mまたはグループgに対して図14に示すフローチャートの処理手順を開始する。
【0073】
次に、停車判断手段10は、停車判断手段10を搭載した自車vと対象としている人mまたはグループgの間の自車線上に、他車vが存在するか否かを判断する(ステップS22)。これは、複数の車両vが走行していた場合に、人mまたはグループgが道路を安全に横断可能とするため、車両vを適切な位置に停車させるために行うものである。即ち、自車vと人mまたはグループgの間の自車線上に他車vが存在する場合は、人mまたはグループgの手前に他車vが停車可能なスペースを空けて自車vが停車しなければならない。
【0074】
そこで、本実施形態では、人mまたはグループgに近い車両vから順番に停車位置hを決定していくことで、当該動作を実現する。よって、他車位置記憶手段7から他車位置を取得し、自車vと、人mまたはグループgとの間の自車線上に他車vが存在するか否かを判断する。自車vと、人mまたはグループgとの間の自車線上に他車vが存在する場合には(ステップS22,No)、図14に示すフローチャートの処理を終了し、停車信号解析手段11が後述する図15に示すフローチャートの処理によって停車位置hを決定する。
【0075】
自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合にはステップS22,Yes)、自車vが安全に停車可能か否かを判断する(ステップS23)。ステップS23において、具体的には、人位置及び待機スコア記憶手段6から人mまたはグループgの位置情報を、自車位置記憶手段8から自車vの位置情報を、道路地図記憶手段9から自車vの周辺の道路地図を取得し、自車vが事前に設定した安全に停車可能な減速度の範囲内で、かつ人mまたはグループgの手前の位置で、かつ交差点などの停車禁止場所を避けて、安全に停車可能か否かを判断する。
【0076】
停車判断手段10は、安全に停車することが不可能だと判断された場合には(ステップS23,No)、図14に示すフローチャートの処理を終了し、自車vは人mまたはグループgの手前で停車することなく通過する。
【0077】
停車判断手段10は、安全に停車可能だと判断されて停車位置hが決定した場合には(ステップS23,Yes)、周辺の他車vに停車信号を送信する(ステップS24)。即ち、自車vの停車位置hを、通信手段4を用いて自車vから一定の距離内(例えば100メートル以内)にいる他車vに送信する。自車vの停車位置hを受信した他車vに搭載された停車信号解析手段11aは、自車vと衝突しない他車vの停車位置hを、後述する図15に示すフローチャートの処理によって決定する。
【0078】
その後、自車vは停車位置hで停車し、歩行者横断信号表示手段13を青色に点灯する(ステップS25)。具体的には、停車判断手段10が走行制御手段12に対して停車指令を出すことで、自車vを停車位置hで停車させる。同時に、停車判断手段10が停車指令を出し、かつ走行制御手段12が自車vを停車状態に制御している場合には、人mが道路を安全に横断可能として、歩行者横断信号表示手段13を青色点灯することで人mに横断可能であることを伝達する(ステップS25を実行している場合は自車vと人mまたはグループgの間の自車線上に他車vは存在しない)。なお、停車判断手段10が車両の停車を確認する方法としては、走行制御手段12から信号を受信して判断してもよいし、自社位置記憶手段8の停車位置から判断してもよい。
【0079】
そして、一定時間(所定時間)の経過または人の横断完了を待つ(ステップS26)。具体的には、自車vが停車して歩行者横断信号表示手段13を青色点灯した後、一定時間(所定時間)が経過した場合、あるいは人mが道路の横断を完了した場合の少なくともどちらか一方では、自車vの走行を再開するために、歩行者横断信号表示手段13を青色点滅することで人mに一定時間(所定時間)内に自車vが走行を開始することを伝達する。
【0080】
ステップS26において、停車判断手段10は、人mが道路の横断を完了を判断する際、人位置及び待機スコア計算手段5が計算した人mの絶対的な位置と、道路地図記憶手段9が持つ地図情報とを利用して判断する。具体的には、人位置及び待機スコア計算手段5は、人検出手段2が検出した人mの相対的な位置と、自車位置検出手段3が検出した自車vの絶対的な位置を用いて、人mの絶対的な位置を計算している。このため、人mの位置が、車道上にいる場合は「横断中」、歩道上あるいは横断待機帯上にいる場合は「横断完了」と判断する。すなわち、「横断中」から「横断完了」への切り替わりが判断されると、人mが道路の横断を完了したと判断する。
【0081】
道路地図記憶手段11に記憶されている道路地図には、前述のとおり、1つ目は、絶対情報である座標値によって歩道・横断待機帯の位置が指定される地図表現の場合、2つ目は、路肩から何メートルが横断待機帯で、何メートルが歩道、といった、路肩からの相対的な地図表現の場合がある。従って、1つ目の場合には、停車判断手段10は、人mの絶対的な位置が、地図上で歩道上あるいは横断待機帯上に相当するか否かを判断する。2つ目の場合には、人mの絶対的な位置で地図を参照することで、当該位置で路肩から何メートルが歩道・横断待機帯かの情報を取得し、その後、例えば特開平6−266828号公報「車輌用車外監視装置」などの公知の技術によって検出された路肩の位置と、人mの位置を相対的に比較することで、歩道上あるいは横断待機帯上に相当するか否かを判断する。
【0082】
歩行者横断信号表示手段13を青色点滅してから事前に設定した一定時間(所定時間)が経過した後、停車判断手段10は、歩行者横断信号表示手段を赤色に点灯し、自車vの走行を再開する(ステップS27)。すなわち、走行を再開するときには、前述のとおり、停車判断手段10は、自車vの走行中は、歩行者横断信号表示手段13に赤色点灯の指令をすることで人mに道路の横断が危険であることを伝達する。以上、図14に示すフローチャートが、停車判断手段10の処理手順である。
【0083】
続いて、停車信号解析手段11の処理手順について説明する。
図15は、歩行者横断支援車両システムにおける停車信号解析手段の処理手順を示すフローチャートである。なお、停車判断手段10と同じく、停車信号解析手段11の処理を実行する車両vの走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達している。
【0084】
最初に、停車信号解析手段11は、停車信号を受信したか否かを判定する(ステップS31)。具体的には、通信手段4を用いて自車vから一定の距離内(例えば100メートル以内)にいる他車vの停車位置hの情報を受信する。この他車vの停車位置hの情報は、図14に示す停車判断手段10のステップS24において送信されたものである。他車vの停車位置hの情報を受信した場合には(ステップS31,Yes)、ステップS32に進む。一方で、他車vの停車位置hを受信しなかった場合には(ステップS31,No)、図15に示すフローチャートの処理を終了する。
【0085】
次に、停車信号解析手段11は、自車vより前の他車v、即ち自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hが決定済みか否かを、通信手段4を用いて確認する(ステップS32)。これは、ステップS22と同じく、人mまたはグループgに近い車両vから順番に停車位置hを決定していくためである。自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hが未決定の場合には(ステップS32,No)、図15に示すフローチャートの処理を終了し、再度、図15に示すフローチャートの処理を実行しながら、自車vと人mまたはグループgの間の自車線上に存在する他車vの停車位置hが決定して停車位置hが送信されるのを待つ。
【0086】
停車信号解析手段11は、自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hが決定済みの場合には(ステップS32,Yes)、自車vが安全に停車可能な停車位置hを決定する(ステップS33)。すなわち、自車vと、人mまたはグループgとの間の自車線上に存在する他車vの停車位置hは決定済みであるため、その後方に位置する自車vの停車位置hを決定する。具体的には、人位置及び待機スコア記憶手段6から人mまたはグループgの位置を、自車位置記憶手段8から自車vの位置を、道路地図記憶手段9から自車vの周辺の道路地図を取得し、ステップS32で取得した他車vの停車位置hの後方で、かつ交差点などの停車禁止場所を避けて、自車vの停車位置hを決定する。
【0087】
ただし、自車vと人mまたはグループgの間の自車線上には他車vが存在せず、自車vとは反対車線にのみ他車vが存在する場合には、自車vが事前に設定した安全に停車可能な減速度の範囲内で、かつ人mまたはグループgの手前の位置で、かつ交差点などの停車禁止場所を避けて、自車vの停車位置hを決定する。
【0088】
停車信号解析手段11は、自車vの停車位置hが決定した後、通信手段4を用いて自車vから一定の距離内(例えば100メートル以内)にいる他車v(周辺の他車v)に、自車vの停車位置hを送信する(ステップS34)。自車vの停車位置hを受信した他車vに搭載された停車信号解析手段11aは、自車vと衝突しない他車vの停車位置hを、図15に示すフローチャートの処理によって人mまたはグループgに近い車両vから順番に決定する。
【0089】
その後、停車信号解析手段11は、自車vは停車位置hで停車する。停車信号解析手段11が走行制御手段12に対して停車指令を出すことで、自車vを停車位置hで停車させる。同時に、停車信号解析手段11が停車指令を出し、かつ走行制御手段12が自車vを停車状態に制御し、かつ自車vと人mまたはグループgの間の自車線上に他車vが存在する場合には、自車vの停車位置hにおける反対車線を他車vが走行中である可能性を考慮して、歩行者横断信号表示手段13を消灯する(ステップS35)。
【0090】
それ以外の場合、即ち、停車信号解析手段11が停車指令を出し、かつ走行制御手段12が自車vを停車状態に制御し、かつ自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合には、人mが道路を安全に横断可能として、歩行者横断信号表示手段13を青色点灯することで人mに横断可能であることを伝達する。
【0091】
停車信号解析手段11は、自車vが停車して歩行者横断信号表示手段13を消灯または青色点灯した後、自車vの前方に停車している他車v(前車)の走行開始を待機する(ステップS36)。なお、自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合(歩行者横断信号表示手段13を青色点灯している場合)には、反対車線上で人mまたはグループgの手前に停車している他車vの走行開始を待機する。また同じく、自車vと、人mまたはグループgとの間の自車線上に他車vが存在しない場合には、反対車線上で人mまたはグループgの手前に停車している他車vが走行を再開するために歩行者横断信号表示手段13を青色点滅させる(ステップS26)のと同時に、歩行者横断信号表示手段13を青色点滅することで人mに一定時間(所定時間)内に自車vが走行を開始することを伝達する。
【0092】
その後、停車信号解析手段11は、自車vの前方に停車している他車vの走行開始に従い、歩行者横断信号表示手段13を赤色に点灯し、自車vの走行を再開する(ステップS37)。なお、自車vと人mまたはグループgの間の自車線上に他車vが存在しない場合(歩行者横断信号表示手段13を青色点灯している場合)には、反対車線上で人mまたはグループgの手前に停車している他車vの走行開始に従い、自車vの走行を再開する。また、前述のとおり、自車vの走行中は、歩行者横断信号表示手段13を赤色点灯することで人mに道路の横断が危険であることを伝達する。以上、図15に示すフローチャートが、停車信号解析手段11の処理手順である。もって、図3に示した歩行者横断支援車両システム1を搭載した車両vの運用の実施形態を実現する。
【0093】
<変形例>
図16は、歩行者横断支援車両システムの変形例となる構成を示すブロック図である。本発明の実施例となる歩行者横断支援車両システム1の変形例の構成について、図16を参照して説明する。変形例においても、歩行者横断支援車両システム1は、自律移動車、乗用車などの車両vに搭載され、当該車両vが走行中の道路を、歩行者や自転車に乗った人などの、人mが安全に横断することを支援するものである。ただし、歩行者横断支援車両システム1の変形例の構成は、前述の歩行者横断支援車両システム1とほぼ同じであるが、人検出手段2が車両v上に搭載されていない点が異なる。人検出手段2の代わりに、横断待機帯wや歩道pなどに設置された人検出手段2zがその機能を有する。それ以外の構成要素は、前述の歩行者横断支援車両システム1と同じであるため、その詳細な説明は省略する。
【0094】
図17は、歩行者横断支援車両システムの変形例の運用の形態を示す平面図である。図17を参照して、歩行者横断支援車両システム1の変形例を搭載した車両v14から車両v16の、3台の車両vが走行している環境を示す。
【0095】
歩行者横断支援車両システム1の変形例の運用の形態においては、人検出手段2zが環境中に設置されている。人検出手段2zは、具体的には道路上の電柱などに設置されたカメラなどを用いて人を検出する手段であり、監視カメラなどで用いられている公知の技術によって構成される。人検出手段2zは、検出した人mの位置情報を、通信手段4を介して車両vに搭載された歩行者横断支援車両システム1の人位置及び待機スコア計算手段5に送信する。以降は前述した歩行者横断支援車両システム1と同様の手順により、歩行者横断支援車両システム1を搭載した車両vの運用の形態を実現する。
【0096】
以上の歩行者横断支援車両システム1の変形例の構成とすることで、車両vに搭載する歩行者横断支援車両システム1の費用を安く抑えることができる。また、道路上に監視カメラが設置されている環境においては、人検出手段2zを新規に設置する必要がないという利点も有する。さらに、道路上に固定された人検出手段2zから人mを検出することにより、移動体である車両vに搭載された人検出手段2から人mを検出する場合と比較して、人mの検出精度が向上するという優れた効果を奏する。
【0097】
本実施形態によれば、横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する車両システムを提供できる。もって、当該車両システムを用いることにより、歩行者と車両の双方にとって、衝突の危険を回避し、安全な移動を可能とする、優れた効果を奏する。
【符号の説明】
【0098】
1 歩行者横断支援車両システム(人横断支援車両システム)
2,2z 人検出手段
3 自車位置検出手段(車両位置検出手段)
4 通信手段
5 人位置及び待機スコア計算手段(人位置・待機スコア計算手段)
6 人位置及び待機スコア記憶手段(人位置・待機スコア記憶手段)
7 他車位置記憶手段
8 自車位置記憶手段
9 道路地図記憶手段
10 停車判断手段
11 停車信号解析手段
12 走行制御手段
13 歩行者横断信号表示手段(人横断信号表示手段)
【特許請求の範囲】
【請求項1】
人が道路を安全に横断することを支援する車両に搭載される人横断支援車両システムであって、
前記車両の進行方向にいる前記人を検出する人検出手段と、
前記車両の位置を検出する車両位置検出手段と、
前記人検出手段が検出した人を横断候補者として、前記車両からの相対的な位置情報と、前記車両位置検出手段が取得した前記車両の位置情報とを用いて、前記横断候補者の絶対的な位置を人位置として計算するとともに、前記横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、前記計算の結果を人位置・待機スコア記憶手段に記憶する人位置・待機スコア計算手段と、
前記横断候補者の前記人位置および前記待機スコアに基づいて、前記車両を停車させるか否かを判断する停車判断手段と、
前記停車判断手段が前記車両を停車させると判断した場合に前記車両を停車させる走行制御手段と、
前記停車判断手段の指令に基づき、前記横断候補者に対し道路を横断可能か否かの旨の情報を表示する人横断信号表示手段と、を備える
ことを特徴とする人横断支援車両システム。
【請求項2】
前記人横断支援車両システムは、さらに、
道路地図情報に、前記人が横断するために待機する、車道と歩道の間に設置された横断待機帯があるか否かの情報を記憶する道路地図記憶手段を有し、
前記人位置・待機スコア計算手段は、前記人検出手段が検出し、前記横断待機帯にいる人が、静止したまま所定時間が経過した場合および予め決められた動作行動を一定時間行っていた場合の少なくともどちらか一方であると判断すると、前記検出した人を横断候補者とし、
前記停車判断手段は、前記横断候補者の前記待機スコアが所定の閾値を超過した場合に車両を停車させると判断する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項3】
前記人横断支援車両システムは、さらに、
前記車両と当該車両の周辺にいる他の車両との間で通信を行う通信手段を備えており、
前記人位置・待機スコア計算手段は、前記通信手段を用いて前記周辺の他の車両と各車両の周辺の人位置情報を共有する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項4】
前記人横断支援車両システムは、さらに、
前記車両と当該車両の周辺にいる他の車両との間で通信を行う通信手段を備えており、
前記停車判断手段は、前記通信手段を用いて取得した周辺の車両位置情報に基づいて、前記人位置と、前記車両との間に他の車両がいるかを判断して前記車両の停車位置を決定する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項5】
前記停車判断手段は、前記車両の停車を判断し停車を確認したとき、前記人横断信号表示手段に、前記横断候補者に対し道路の横断可能の旨を表示する点灯をさせ、所定時間が経過した場合に、前記点灯を点滅に変更して前記車両の走行の開始が近い旨を表示する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項6】
前記道路地図記憶手段は、前記車両が走行する環境の道路情報である停車禁止位置を含む地図情報を記憶しており、
前記停車判断手段は、前記道路地図記憶手段を参照して前記停車禁止位置を避けて停車位置を決定する
ことを特徴とする請求項2に記載の人横断支援車両システム。
【請求項7】
前記人位置・待機スコア計算手段は、
複数の前記横断候補者が前記横断待機帯に存在した場合に、所定の条件を満たすと前記複数の横断候補者をグループピングし、前記グルーピングした人数に応じて前記待機スコアを変化させる
ことを特徴とする請求項2に記載の人横断支援車両システム。
【請求項8】
前記人検出手段が検出した人を所定時間検出できないとき、
前記人位置・待機スコア計算手段が前記横断候補者の待機スコアをリセットする
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項9】
前記人横断支援車両システムは、前記人検出手段を備えておらず、
前記車両が走行する道路側に設置された人検出手段から検出された人の検出情報を、前記通信手段を介して取得する
ことを特徴とする請求項3または請求項4に記載の人横断支援車両システム。
【請求項10】
車両の進行方向にいる人を検出する人検出手段と、前記車両の位置を検出する車両位置検出手段と、人位置・待機スコア計算手段と、停車判断手段と、走行制御手段と、人横断信号表示手段と、を備える車両システムにおいて、前記人が安全に道路を横断することを支援する人横断支援方法であって、
前記人位置・待機スコア計算手段は、前記人検出手段が検出した人を横断候補者として、車両からの相対的な位置情報と、前記車両位置検出手段が取得した前記車両の位置情報とを用いて、前記横断候補者の絶対的な位置を人位置として計算するとともに、前記横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、前記計算の結果を人位置・待機スコア記憶手段に記憶し、
前記停車判断手段は、前記横断候補者の前記人位置および前記待機スコアに基づいて、前記車両を停車させるか否かを判断し、前記車両を停車させると判断した場合に前記走行制御手段に前記車両を停車させるように指令し、前記横断候補者に対し道路を横断可能である旨の情報を人横断信号表示手段に指令する
ことを特徴とする人横断支援方法。
【請求項11】
前記車両システムは、さらに、
道路地図情報に、前記人が横断するために待機する、車道と歩道の間に設置された横断待機帯があるか否かの情報を記憶する道路地図記憶手段を有しており、
前記人位置・待機スコア計算手段は、前記人検出手段が検出し、前記横断待機帯にいる人が、静止したまま所定時間が経過した場合および予め決められた動作行動を一定時間行っていた場合の少なくともどちらか一方であると判断すると、前記検出した人を横断候補者とし、
前記停車判断手段は、前記横断候補者の前記待機スコアが所定の閾値を超過した場合に車両を停車させると判断する
ことを特徴とする請求項10に記載の人横断支援方法。
【請求項1】
人が道路を安全に横断することを支援する車両に搭載される人横断支援車両システムであって、
前記車両の進行方向にいる前記人を検出する人検出手段と、
前記車両の位置を検出する車両位置検出手段と、
前記人検出手段が検出した人を横断候補者として、前記車両からの相対的な位置情報と、前記車両位置検出手段が取得した前記車両の位置情報とを用いて、前記横断候補者の絶対的な位置を人位置として計算するとともに、前記横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、前記計算の結果を人位置・待機スコア記憶手段に記憶する人位置・待機スコア計算手段と、
前記横断候補者の前記人位置および前記待機スコアに基づいて、前記車両を停車させるか否かを判断する停車判断手段と、
前記停車判断手段が前記車両を停車させると判断した場合に前記車両を停車させる走行制御手段と、
前記停車判断手段の指令に基づき、前記横断候補者に対し道路を横断可能か否かの旨の情報を表示する人横断信号表示手段と、を備える
ことを特徴とする人横断支援車両システム。
【請求項2】
前記人横断支援車両システムは、さらに、
道路地図情報に、前記人が横断するために待機する、車道と歩道の間に設置された横断待機帯があるか否かの情報を記憶する道路地図記憶手段を有し、
前記人位置・待機スコア計算手段は、前記人検出手段が検出し、前記横断待機帯にいる人が、静止したまま所定時間が経過した場合および予め決められた動作行動を一定時間行っていた場合の少なくともどちらか一方であると判断すると、前記検出した人を横断候補者とし、
前記停車判断手段は、前記横断候補者の前記待機スコアが所定の閾値を超過した場合に車両を停車させると判断する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項3】
前記人横断支援車両システムは、さらに、
前記車両と当該車両の周辺にいる他の車両との間で通信を行う通信手段を備えており、
前記人位置・待機スコア計算手段は、前記通信手段を用いて前記周辺の他の車両と各車両の周辺の人位置情報を共有する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項4】
前記人横断支援車両システムは、さらに、
前記車両と当該車両の周辺にいる他の車両との間で通信を行う通信手段を備えており、
前記停車判断手段は、前記通信手段を用いて取得した周辺の車両位置情報に基づいて、前記人位置と、前記車両との間に他の車両がいるかを判断して前記車両の停車位置を決定する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項5】
前記停車判断手段は、前記車両の停車を判断し停車を確認したとき、前記人横断信号表示手段に、前記横断候補者に対し道路の横断可能の旨を表示する点灯をさせ、所定時間が経過した場合に、前記点灯を点滅に変更して前記車両の走行の開始が近い旨を表示する
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項6】
前記道路地図記憶手段は、前記車両が走行する環境の道路情報である停車禁止位置を含む地図情報を記憶しており、
前記停車判断手段は、前記道路地図記憶手段を参照して前記停車禁止位置を避けて停車位置を決定する
ことを特徴とする請求項2に記載の人横断支援車両システム。
【請求項7】
前記人位置・待機スコア計算手段は、
複数の前記横断候補者が前記横断待機帯に存在した場合に、所定の条件を満たすと前記複数の横断候補者をグループピングし、前記グルーピングした人数に応じて前記待機スコアを変化させる
ことを特徴とする請求項2に記載の人横断支援車両システム。
【請求項8】
前記人検出手段が検出した人を所定時間検出できないとき、
前記人位置・待機スコア計算手段が前記横断候補者の待機スコアをリセットする
ことを特徴とする請求項1に記載の人横断支援車両システム。
【請求項9】
前記人横断支援車両システムは、前記人検出手段を備えておらず、
前記車両が走行する道路側に設置された人検出手段から検出された人の検出情報を、前記通信手段を介して取得する
ことを特徴とする請求項3または請求項4に記載の人横断支援車両システム。
【請求項10】
車両の進行方向にいる人を検出する人検出手段と、前記車両の位置を検出する車両位置検出手段と、人位置・待機スコア計算手段と、停車判断手段と、走行制御手段と、人横断信号表示手段と、を備える車両システムにおいて、前記人が安全に道路を横断することを支援する人横断支援方法であって、
前記人位置・待機スコア計算手段は、前記人検出手段が検出した人を横断候補者として、車両からの相対的な位置情報と、前記車両位置検出手段が取得した前記車両の位置情報とを用いて、前記横断候補者の絶対的な位置を人位置として計算するとともに、前記横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、前記計算の結果を人位置・待機スコア記憶手段に記憶し、
前記停車判断手段は、前記横断候補者の前記人位置および前記待機スコアに基づいて、前記車両を停車させるか否かを判断し、前記車両を停車させると判断した場合に前記走行制御手段に前記車両を停車させるように指令し、前記横断候補者に対し道路を横断可能である旨の情報を人横断信号表示手段に指令する
ことを特徴とする人横断支援方法。
【請求項11】
前記車両システムは、さらに、
道路地図情報に、前記人が横断するために待機する、車道と歩道の間に設置された横断待機帯があるか否かの情報を記憶する道路地図記憶手段を有しており、
前記人位置・待機スコア計算手段は、前記人検出手段が検出し、前記横断待機帯にいる人が、静止したまま所定時間が経過した場合および予め決められた動作行動を一定時間行っていた場合の少なくともどちらか一方であると判断すると、前記検出した人を横断候補者とし、
前記停車判断手段は、前記横断候補者の前記待機スコアが所定の閾値を超過した場合に車両を停車させると判断する
ことを特徴とする請求項10に記載の人横断支援方法。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−123636(P2011−123636A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−280165(P2009−280165)
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]