
人物を位置特定する方法および装置
本発明は、動員時に被監視領域内の人員を位置特定する方法および装置に関する。この場合、超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機が使用される。送信機(2)は動員中、被監視領域内に位置固定されて配置され、送受信機(3)は位置特定すべき人員に取り付けられ、受信機(4)は被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置されてこの監視用コンピュータと接続される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被監視領域たとえば見通せない通りにくい領域や周囲の囲まれた地上および地下の構造物内で、人物を位置特定する方法および装置に関する。
【0002】
火災やそれに類似した危険な状況を鎮圧する場合、出動要員は火災を鎮圧し場合によっては犠牲者を危険な領域から収容するために、該当する領域たとえば建物に入り込まなければならない。また、火災を鎮圧するときに出動要員自体が危険に陥る可能性もあり、さらに出動要員を危険領域から誘導する目的であるにせよ、あるいは出動要員をさらに別の出動要員が助けに行ったりする目的であるにせよ、(付加的に)外部からの助けを必要とする可能性もある。
【0003】
何らかの助けとなるのはここでは移動無線機器であり、これを用いることで指令センタと出動時に現場にいる出動要員との間の意思疎通が可能となる。とはいえ、指令センタが災害領域における出動要員の精確な滞在場所について常に把握するという意味での精確な位置特定はこれによっても不可能である。
【0004】
EP 870 203 B1から、被監視領域において人員を位置特定する装置がすでに知られており、この装置にはそれぞれ送受信機器を装備した複数の基地局が設けられており、それらのうち少なくとも1つが被監視領域に配置され、その際に1つの送受信機を位置特定すべき人員に取り付けるようにする。基地局は、移動機器に対する位置に応じて影響が及ぼされる。これらの基地局は、有線または無線を介して被監視領域外に配置された監視用コンピュータ(指令センタ)と接続されており、そこにおいて受信信号が評価される。
【0005】
公知の装置の場合、出動時に被監視領域に送受信装置を固定的に設置しておかなければならない。さらに公知の装置は、災害発生時にやって来る出動要員の相応の装備が据え付けられた機器と互換性をもっていなければならない点でも不都合である。
【0006】
本発明の課題は、被監視領域内の人員を位置特定する方法および装置において、被監視領域における人員の滞在場所を精確に突き止めることができ、さらに被監視領域を通る人員の経路を追従できるようにすることにある。さらに本発明による方法および装置を、到来する出動要員が携行する機器を用いるだけで利用できるようにしたい。
【0007】
本発明によればこの課題は、被監視領域内の人員を位置特定する方法において、超広帯域(UWB)で動作する少なくとも1つの送信機と、超広帯域(UWB)で動作する少なくとも1つの送受信機と、超広帯域(UWB)で動作する受信機を使用し、動員中、前記送信機を被監視領域内に位置固定して配置し、前記送受信機を位置特定すべき人員に取り付け、前記受信機を、被監視領域外に位置する監視用コンピュータ(指令センタ)に配置して該監視用コンピュータと接続することにより解決される。
【0008】
さらに本発明によればこの課題は、被監視領域内の人員を位置特定する装置において、超広帯域(UWB)で動作する少なくとも1つの送信機と、超広帯域(UWB)で動作する少なくとも1つの送受信機と、超広帯域(UWB)で動作する受信機が設けられており、動員中、前記送信機は被監視領域内に位置固定されて配置され、前記送受信機は位置特定すべき人員に取り付けられ、前記受信機は、被監視領域外に位置する監視用コンピュータ(指令センタ)に配置されて該監視用コンピュータと接続されることにより解決される。
【0009】
超広帯域(UWB)は、短い距離において距離測定に利用できる技術であり、これは構造および利用される材料に依存して200mまでの屋外および70mまでの建物内で利用できる。最大距離はパルス化してよい強度にのみ依存する。ここで基礎としたのは、公開されているアメリカの規則(FCC)である。超広帯域信号は極端に短いパルスである。このようなパルスが、最初は所在位置のわからない移動型の送信機から発せられる。この信号には時間情報が含まれているので、パルスの伝播時間に基づき個々の機器の距離を計算することができる。したがって各機器は、ネットワーク内の隣接関係を把握することになる。超広帯域で達成可能な現在位置特定の精度はcmの範囲にある。これにより個々の機器のネットワークが互いに構築され、このようなネットワークは固定的な基準点をまだもっていないが、個々の機器相互間の距離をcmで精確に求めることができる。超広帯域信号の評価は、建物内でも屋外で制約なく可能である。超広帯域信号でないと反射してしまう障害物は貫通する。さらに超広帯域によってディジタルデータを伝送することができ、このようなディジタルデータを相応の装置において評価することができる。
【0010】
ただしすでに述べたように、超広帯域信号の到達距離は制約されている。したがって、超広帯域技術を公知の位置特定方式であるロランCと組み合わせるのが有利である。ほぼ世界中に存在しているロランCシステムは、固定的に設置され所在地が既知である送信機チェーンを介して位置特定のための長波信号を送信する。最近では、殊に信号処理に関してソフトウェアとハードウェアの改善された新たな受信システムを利用できるので、ここで説明しているシステムのための精度要求を満たすことができる。専用アンテナの利用も、室内空間での受信の格段な向上に寄与する。しかしロランC方式だけであると、十分な確実性および精度が得られない。
【0011】
基本的には3つの機器があれば十分であり、つまり座標形成のために定置すべき送信機と位置特定もしくは監視すべき人員のところにあるトランシーバとデータ通信のため指令センタに設けられる受信機とがあれば十分である。これら3つの機器が、可変の座標系における基礎を成す。
【0012】
本発明による方法および装置の精度ならびに確実性は、自身のトランシーバを個々に装着して危険領域に出動する要員の数とともに向上する。この場合、固定的に設置された送信機により規定される平面を出動要員が離れたとき、空間内の捕捉能力が拡張される。
【0013】
精度と確実性をさらに向上させるために有利であるのは、固定的に設置された2台の送信機を被監視領域に設けることである。
【0014】
第1の定置された送信機により規定される平面外に送信機を配置することにより、空間内の精度と確実性をさらに向上させることができ、これはたとえば出動要員が被監視領域のそれぞれ異なる平面で作業する場合である。
【0015】
被監視領域が建物内部である場合に望ましいのは、位置固定された送信機を外側から容易に接近できる建物の目立つ個所に取り付けることであり、建物の1つまたは複数の垂直な角に取り付けるのが有利である。
【0016】
装置のはたらきにとって前提条件となるのは、(出動用車両または外部で用いられる)性能のよい携行可能なコンピュータと、必要とされ場合によっては望ましい以下の評価と表示を実現する性能のよいプログラムである。
【0017】
出動用コンピュータのディスプレイには、出動要員に取り付けられたトランシーバの識別子をもつポイントとして表示が現れるようにし、その際、辿った経路をディスプレイに表示させる。望ましいのは、位置特定された人員の高さの記述である。さらに出動時点と出動期間の問い合わせも行えるようにする。
【0018】
装置の各機器により規定される多角形の角の頂点によって、cm精度の距離測定が実現される。
【0019】
位置データの交換ならびに各モバイルトランシーバ間の時間的な同期合わせは、距離測定ごとにデータプロトコルのコメント部分において行われる。距離測定のための問い合わせ各々は、受信領域に存在する各トランシーバにより受信され応答されるので、各トランシーバは自身を取り囲む単位のデータを確実に識別することができる。
【0020】
データの評価にあたり、受信信号がベクトルに換算されてディスプレイに表示される。
【0021】
有利であるのは、個々の出動場所に関して出動用コンピュータで表示可能なディジタル形式の相応の建物設計図/土地台帳を利用できるようにすることである。この場合、DIN 14095による消防用見取り図が第1に考えられるが、他の任意の地図や市街図も利用できる。同様に、出動地域の衛星写真を出動用コンピュータに表示して評価することもできる。これはとりわけ災害時の出動において必要とされ、その目的は救助要員がどこでどのように配分され位置しているのか、あるいは救助要員をどこでどのように配分して位置決めすべきであるのかを表示することである。
【0022】
ディジタル形式の精確な建物設計図があるならば、位置特定された建物内の人員のところへ行くことのできる最短の経路を計算して、その設計図に表示させることができる。出動部隊指令者は、自身の手元にある出動用コンピュータ上のディジタル設計図において、もはや利用できない通路(経路、階段室等)をマークすることができる。これにより実現しようとしているのは、梯子などそれ相応の補助手段をできるかぎり迅速にそのポジションへ持ち込んで、建物からの脱出を実現させることである。
【0023】
さらに有利であるのは、システムで利用すべき機器が送受信機(トランシーバ)と同一に構成されていることであり、その際、必要に応じて基準送信機においては受信部が、指令センタに配置すべき機器においては送信部が、遮断されまたは非アクティブ状態に切り替えられる。さらに、出動要員に取り付けられている機器にセンサならびに相応の信号伝送装置を装備するのも有利であり、これらによって出動場所における状態および出動要員に関する情報を捕捉して伝送することができる。このような情報として挙げられるのは、呼吸空気供給量(残留量)、脈拍数、温度、出動期間等のような状態データであって、これらはデータ無線を介して常に利用可能であって、これにより出動部隊指令者が決定下すときに支援することができる。
【0024】
次に、本発明について詳しく説明する。
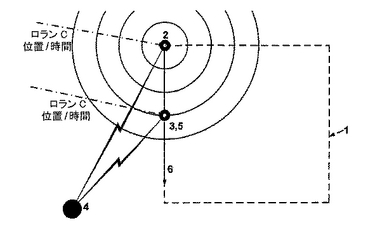
図1a〜図1dには、時点T=t0、t1、t2、t3における出動の経過が描かれている。
【0025】
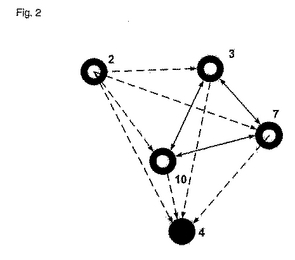
図2には、個々の送受信機(トランシーバ)間の通信と伝播時間測定の様子が描かれている。
【0026】
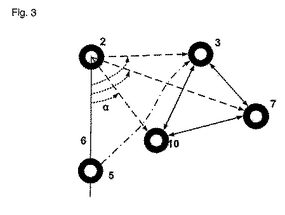
図3には、位置特定の経過が描かれている。
【0027】
図1a〜図1dには、高さz0における建物1の見取り図が示されており、この見取り図の角に本来の出動開始前にトランシーバ2(以下では「基準トランシーバ」と称する)が定置されている。時点T=t0(図1a)において、自身の可動型トランシーバ(以下では「モバイルトランシーバ」と称する)が取り付けられた一人の出動要員が、開口部(ドア、窓、壁の決壊した個所)を通って建物の中に入り込む。ついで移動指令センタに、そこに属するコンピュータと接続された指令センタ受信機4が設けられる。
【0028】
トランシーバ2,3は同一の構造を有しており、これらは付属のアンテナを備えたロランC部とそれぞれ1つのアンテナと1つの受信機を備えた超広帯域部を有している。超広帯域部は少なくとも、出動要員に装着された機器において付加的に送信機を装備している。さらにそれぞれ電圧供給部とプロセッサが設けられている。モバイルトランシーバ3には場合によってはこれらに加えて、人体データと出動要員周囲のデータを伝送するためのテレメトリ領域も設けられている。トランシーバ自体にはいかなる操作部材も設けられていない。このトランシーバは、付属の装着ケースから取り出されるとただちに作動状態となる。
【0029】
出動開始時点において、つまり出動要員が時点T=t0に建物1に入り込んだとき、その個所に仮想的な基準点5および基準線6が定義され、この基準線は基準トランシーバ2から出発して有利には建物1の壁に沿って延びている。計算により求められた仮想の基準点5は、いわば別の定置される基準トランシーバ(送信機)の代わりとなる。
【0030】
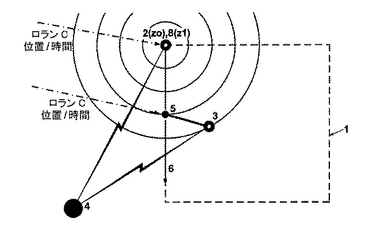
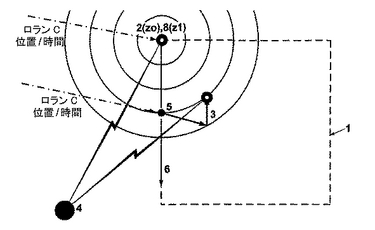
建物1に入り込んだ後、出動要員が移動し、時点T=t1において図1bに示されている個所に到達する。出動要員はさらに移動していき、時点T=t2において図1cに示した地点に到達する。
【0031】
この期間中、トランシーバ2,3とトランシーバ2,3はロランC送信機と接続された状態にあり、トランシーバ2,3,4は超広帯域を介して互いに接続された状態にあって、その際、これらの相互の位置は利用可能な情報によって常に追従される。この場合、出動部隊指令者は指令センタコンピュータのディスプレイ上で出動要員の経路を追従することができ、ディスプレイ上でそれを把握することができるので、このようにすれば出動要員に取り付けられているモバイルトランシーバが欠落ないしは故障したならば、その出動要員自体の位置を迅速に特定することができる。視界条件が悪いとき(発煙時)に、無線を介して(当然ながら十分な呼吸保護器具を装備している)出動要員に対し建物1内を誘導することができる。ディジタル化された土地台帳を利用できるようにし、出動開始時に読み込ませることができれば、とりわけ安全かつ快適にこのことを行うことができる。
【0032】
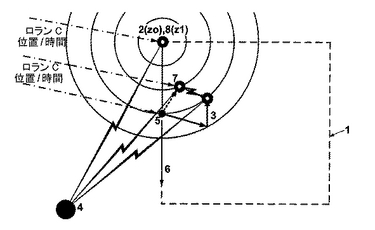
最初の出動要員の後に、2番目の出動要員が第2のモバイルトランシーバ7を伴って基準点5と基準線6を越えることになる。第2の出動要員は破線に沿って時点T=t3において、図1dに示されている個所に到達する。第2の出動要員が入り込むとともにモバイルトランシーバ3,7は互いに自動的に移動ネットワークを構築し、これによってシステムの精度と安全性がいっそう高められる。このネットワークは、トランシーバ双方および場合によってはさらに別の出動要員が平面Z0上で動いているかぎり、2次元に保たれる。そしてこのネットワークは、少なくとも1人の出動要員が平面Z0を離れるとただちに自動的に3次元となり、この場合、高低差を精確に捉えて処理し描画することができる。
【0033】
建物1の別の平面z1に別の基準トランシーバ8を設置すれば、3次元システムを高さの測定に関してさらに向上させかつ簡単にすることができる。付加的な基準トランシーバ8を、建物1の1つの角に取り付けることもできるし、あるいはそのすぐ近くのポールや電柱を用いてそれを取り付けることもできる。ある出動要員が付加的に規定された平面Z1上に入るとただちに、第1の平面または第2の平面Z0もしくはZ1の情報に対する所要精度を簡単に実現することができる。
【0034】
図2には、3つの移動局3,7,10の間で通信の行われる様子が描かれている。この場合、基準トランシーバ2はモバイルトランシーバ3,7,10へ送信を行い、すべてのトランシーバは指令センタ受信機4へ送信を行い、さらにモバイルトランシーバ3,7,10は相互間で送信および受信を行う(各トランシーバ間の単方向矢印および双方向矢印を参照)。この場合、各モバイルトランシーバ3,7,10間の通信はいわゆるピアツーピアコネクションとして構成されており、つまり各局に対し同等の権利が与えられていて、データ伝送に対し同じチャンスが与えられている。したがって各局は受信可能なすべての局からすべてのデータを収集することができ、さらに再転送することができる。このことは、ある局が(たとえば遮断などにより)指令センタへのコネクションをもっていないときに有利である。
【0035】
図3には、この平面における位置特定の経過が描かれている。はじめに、定置されている基準トランシーバ2のポジションがロランCにより突き止められる。これに基づき、作戦開始時点に最初の出動要員の所在位置で仮想の基準点5と基準線6が確定され、これはロランCポジション測定と伝播時間測定(超広帯域)により行われる。出動中、モバイルトランシーバ3,7,10間の伝播時間ならびに基準トランシーバ2とモバイルトランシーバ3,7,10間の伝播時間および角度αが測定される。
【0036】
2次元の位置特定は、UWBデータを用いた三角測量と個々のロランCポジションへの結合により行われる。
【0037】
高さの測定のためには、別の基準点を決定する必要がある。高さ測定の精度に対し高い要求が課されないのであれば、移動ネットワークの特性を利用し個々のトランシーバを基準点として設定すれば十分である。(出発平面に関して)モバイルトランシーバの相対的な高さを測定するためには、高さ基準点を設定する必要がある。これは以下のようにして行うことができる。すなわちこの場合、第2の基準局を建物の外壁に位置決めするかまたは、ポールもしくは電柱に位置決めすることによって行われる。両方の局の基本線を基準線として用いることができる。
【図面の簡単な説明】
【0038】
【図1a】時点T=t0における出動の経過を示す図
【図1b】時点T=t1における出動の経過を示す図
【図1c】時点T=t2における出動の経過を示す図
【図1d】時点T=t3における出動の経過を示す図
【図2】個々の送受信機(トランシーバ)間の通信と伝播時間測定の様子を示す図
【図3】位置特定の経過を示す図
【技術分野】
【0001】
本発明は、被監視領域たとえば見通せない通りにくい領域や周囲の囲まれた地上および地下の構造物内で、人物を位置特定する方法および装置に関する。
【0002】
火災やそれに類似した危険な状況を鎮圧する場合、出動要員は火災を鎮圧し場合によっては犠牲者を危険な領域から収容するために、該当する領域たとえば建物に入り込まなければならない。また、火災を鎮圧するときに出動要員自体が危険に陥る可能性もあり、さらに出動要員を危険領域から誘導する目的であるにせよ、あるいは出動要員をさらに別の出動要員が助けに行ったりする目的であるにせよ、(付加的に)外部からの助けを必要とする可能性もある。
【0003】
何らかの助けとなるのはここでは移動無線機器であり、これを用いることで指令センタと出動時に現場にいる出動要員との間の意思疎通が可能となる。とはいえ、指令センタが災害領域における出動要員の精確な滞在場所について常に把握するという意味での精確な位置特定はこれによっても不可能である。
【0004】
EP 870 203 B1から、被監視領域において人員を位置特定する装置がすでに知られており、この装置にはそれぞれ送受信機器を装備した複数の基地局が設けられており、それらのうち少なくとも1つが被監視領域に配置され、その際に1つの送受信機を位置特定すべき人員に取り付けるようにする。基地局は、移動機器に対する位置に応じて影響が及ぼされる。これらの基地局は、有線または無線を介して被監視領域外に配置された監視用コンピュータ(指令センタ)と接続されており、そこにおいて受信信号が評価される。
【0005】
公知の装置の場合、出動時に被監視領域に送受信装置を固定的に設置しておかなければならない。さらに公知の装置は、災害発生時にやって来る出動要員の相応の装備が据え付けられた機器と互換性をもっていなければならない点でも不都合である。
【0006】
本発明の課題は、被監視領域内の人員を位置特定する方法および装置において、被監視領域における人員の滞在場所を精確に突き止めることができ、さらに被監視領域を通る人員の経路を追従できるようにすることにある。さらに本発明による方法および装置を、到来する出動要員が携行する機器を用いるだけで利用できるようにしたい。
【0007】
本発明によればこの課題は、被監視領域内の人員を位置特定する方法において、超広帯域(UWB)で動作する少なくとも1つの送信機と、超広帯域(UWB)で動作する少なくとも1つの送受信機と、超広帯域(UWB)で動作する受信機を使用し、動員中、前記送信機を被監視領域内に位置固定して配置し、前記送受信機を位置特定すべき人員に取り付け、前記受信機を、被監視領域外に位置する監視用コンピュータ(指令センタ)に配置して該監視用コンピュータと接続することにより解決される。
【0008】
さらに本発明によればこの課題は、被監視領域内の人員を位置特定する装置において、超広帯域(UWB)で動作する少なくとも1つの送信機と、超広帯域(UWB)で動作する少なくとも1つの送受信機と、超広帯域(UWB)で動作する受信機が設けられており、動員中、前記送信機は被監視領域内に位置固定されて配置され、前記送受信機は位置特定すべき人員に取り付けられ、前記受信機は、被監視領域外に位置する監視用コンピュータ(指令センタ)に配置されて該監視用コンピュータと接続されることにより解決される。
【0009】
超広帯域(UWB)は、短い距離において距離測定に利用できる技術であり、これは構造および利用される材料に依存して200mまでの屋外および70mまでの建物内で利用できる。最大距離はパルス化してよい強度にのみ依存する。ここで基礎としたのは、公開されているアメリカの規則(FCC)である。超広帯域信号は極端に短いパルスである。このようなパルスが、最初は所在位置のわからない移動型の送信機から発せられる。この信号には時間情報が含まれているので、パルスの伝播時間に基づき個々の機器の距離を計算することができる。したがって各機器は、ネットワーク内の隣接関係を把握することになる。超広帯域で達成可能な現在位置特定の精度はcmの範囲にある。これにより個々の機器のネットワークが互いに構築され、このようなネットワークは固定的な基準点をまだもっていないが、個々の機器相互間の距離をcmで精確に求めることができる。超広帯域信号の評価は、建物内でも屋外で制約なく可能である。超広帯域信号でないと反射してしまう障害物は貫通する。さらに超広帯域によってディジタルデータを伝送することができ、このようなディジタルデータを相応の装置において評価することができる。
【0010】
ただしすでに述べたように、超広帯域信号の到達距離は制約されている。したがって、超広帯域技術を公知の位置特定方式であるロランCと組み合わせるのが有利である。ほぼ世界中に存在しているロランCシステムは、固定的に設置され所在地が既知である送信機チェーンを介して位置特定のための長波信号を送信する。最近では、殊に信号処理に関してソフトウェアとハードウェアの改善された新たな受信システムを利用できるので、ここで説明しているシステムのための精度要求を満たすことができる。専用アンテナの利用も、室内空間での受信の格段な向上に寄与する。しかしロランC方式だけであると、十分な確実性および精度が得られない。
【0011】
基本的には3つの機器があれば十分であり、つまり座標形成のために定置すべき送信機と位置特定もしくは監視すべき人員のところにあるトランシーバとデータ通信のため指令センタに設けられる受信機とがあれば十分である。これら3つの機器が、可変の座標系における基礎を成す。
【0012】
本発明による方法および装置の精度ならびに確実性は、自身のトランシーバを個々に装着して危険領域に出動する要員の数とともに向上する。この場合、固定的に設置された送信機により規定される平面を出動要員が離れたとき、空間内の捕捉能力が拡張される。
【0013】
精度と確実性をさらに向上させるために有利であるのは、固定的に設置された2台の送信機を被監視領域に設けることである。
【0014】
第1の定置された送信機により規定される平面外に送信機を配置することにより、空間内の精度と確実性をさらに向上させることができ、これはたとえば出動要員が被監視領域のそれぞれ異なる平面で作業する場合である。
【0015】
被監視領域が建物内部である場合に望ましいのは、位置固定された送信機を外側から容易に接近できる建物の目立つ個所に取り付けることであり、建物の1つまたは複数の垂直な角に取り付けるのが有利である。
【0016】
装置のはたらきにとって前提条件となるのは、(出動用車両または外部で用いられる)性能のよい携行可能なコンピュータと、必要とされ場合によっては望ましい以下の評価と表示を実現する性能のよいプログラムである。
【0017】
出動用コンピュータのディスプレイには、出動要員に取り付けられたトランシーバの識別子をもつポイントとして表示が現れるようにし、その際、辿った経路をディスプレイに表示させる。望ましいのは、位置特定された人員の高さの記述である。さらに出動時点と出動期間の問い合わせも行えるようにする。
【0018】
装置の各機器により規定される多角形の角の頂点によって、cm精度の距離測定が実現される。
【0019】
位置データの交換ならびに各モバイルトランシーバ間の時間的な同期合わせは、距離測定ごとにデータプロトコルのコメント部分において行われる。距離測定のための問い合わせ各々は、受信領域に存在する各トランシーバにより受信され応答されるので、各トランシーバは自身を取り囲む単位のデータを確実に識別することができる。
【0020】
データの評価にあたり、受信信号がベクトルに換算されてディスプレイに表示される。
【0021】
有利であるのは、個々の出動場所に関して出動用コンピュータで表示可能なディジタル形式の相応の建物設計図/土地台帳を利用できるようにすることである。この場合、DIN 14095による消防用見取り図が第1に考えられるが、他の任意の地図や市街図も利用できる。同様に、出動地域の衛星写真を出動用コンピュータに表示して評価することもできる。これはとりわけ災害時の出動において必要とされ、その目的は救助要員がどこでどのように配分され位置しているのか、あるいは救助要員をどこでどのように配分して位置決めすべきであるのかを表示することである。
【0022】
ディジタル形式の精確な建物設計図があるならば、位置特定された建物内の人員のところへ行くことのできる最短の経路を計算して、その設計図に表示させることができる。出動部隊指令者は、自身の手元にある出動用コンピュータ上のディジタル設計図において、もはや利用できない通路(経路、階段室等)をマークすることができる。これにより実現しようとしているのは、梯子などそれ相応の補助手段をできるかぎり迅速にそのポジションへ持ち込んで、建物からの脱出を実現させることである。
【0023】
さらに有利であるのは、システムで利用すべき機器が送受信機(トランシーバ)と同一に構成されていることであり、その際、必要に応じて基準送信機においては受信部が、指令センタに配置すべき機器においては送信部が、遮断されまたは非アクティブ状態に切り替えられる。さらに、出動要員に取り付けられている機器にセンサならびに相応の信号伝送装置を装備するのも有利であり、これらによって出動場所における状態および出動要員に関する情報を捕捉して伝送することができる。このような情報として挙げられるのは、呼吸空気供給量(残留量)、脈拍数、温度、出動期間等のような状態データであって、これらはデータ無線を介して常に利用可能であって、これにより出動部隊指令者が決定下すときに支援することができる。
【0024】
次に、本発明について詳しく説明する。
図1a〜図1dには、時点T=t0、t1、t2、t3における出動の経過が描かれている。
【0025】
図2には、個々の送受信機(トランシーバ)間の通信と伝播時間測定の様子が描かれている。
【0026】
図3には、位置特定の経過が描かれている。
【0027】
図1a〜図1dには、高さz0における建物1の見取り図が示されており、この見取り図の角に本来の出動開始前にトランシーバ2(以下では「基準トランシーバ」と称する)が定置されている。時点T=t0(図1a)において、自身の可動型トランシーバ(以下では「モバイルトランシーバ」と称する)が取り付けられた一人の出動要員が、開口部(ドア、窓、壁の決壊した個所)を通って建物の中に入り込む。ついで移動指令センタに、そこに属するコンピュータと接続された指令センタ受信機4が設けられる。
【0028】
トランシーバ2,3は同一の構造を有しており、これらは付属のアンテナを備えたロランC部とそれぞれ1つのアンテナと1つの受信機を備えた超広帯域部を有している。超広帯域部は少なくとも、出動要員に装着された機器において付加的に送信機を装備している。さらにそれぞれ電圧供給部とプロセッサが設けられている。モバイルトランシーバ3には場合によってはこれらに加えて、人体データと出動要員周囲のデータを伝送するためのテレメトリ領域も設けられている。トランシーバ自体にはいかなる操作部材も設けられていない。このトランシーバは、付属の装着ケースから取り出されるとただちに作動状態となる。
【0029】
出動開始時点において、つまり出動要員が時点T=t0に建物1に入り込んだとき、その個所に仮想的な基準点5および基準線6が定義され、この基準線は基準トランシーバ2から出発して有利には建物1の壁に沿って延びている。計算により求められた仮想の基準点5は、いわば別の定置される基準トランシーバ(送信機)の代わりとなる。
【0030】
建物1に入り込んだ後、出動要員が移動し、時点T=t1において図1bに示されている個所に到達する。出動要員はさらに移動していき、時点T=t2において図1cに示した地点に到達する。
【0031】
この期間中、トランシーバ2,3とトランシーバ2,3はロランC送信機と接続された状態にあり、トランシーバ2,3,4は超広帯域を介して互いに接続された状態にあって、その際、これらの相互の位置は利用可能な情報によって常に追従される。この場合、出動部隊指令者は指令センタコンピュータのディスプレイ上で出動要員の経路を追従することができ、ディスプレイ上でそれを把握することができるので、このようにすれば出動要員に取り付けられているモバイルトランシーバが欠落ないしは故障したならば、その出動要員自体の位置を迅速に特定することができる。視界条件が悪いとき(発煙時)に、無線を介して(当然ながら十分な呼吸保護器具を装備している)出動要員に対し建物1内を誘導することができる。ディジタル化された土地台帳を利用できるようにし、出動開始時に読み込ませることができれば、とりわけ安全かつ快適にこのことを行うことができる。
【0032】
最初の出動要員の後に、2番目の出動要員が第2のモバイルトランシーバ7を伴って基準点5と基準線6を越えることになる。第2の出動要員は破線に沿って時点T=t3において、図1dに示されている個所に到達する。第2の出動要員が入り込むとともにモバイルトランシーバ3,7は互いに自動的に移動ネットワークを構築し、これによってシステムの精度と安全性がいっそう高められる。このネットワークは、トランシーバ双方および場合によってはさらに別の出動要員が平面Z0上で動いているかぎり、2次元に保たれる。そしてこのネットワークは、少なくとも1人の出動要員が平面Z0を離れるとただちに自動的に3次元となり、この場合、高低差を精確に捉えて処理し描画することができる。
【0033】
建物1の別の平面z1に別の基準トランシーバ8を設置すれば、3次元システムを高さの測定に関してさらに向上させかつ簡単にすることができる。付加的な基準トランシーバ8を、建物1の1つの角に取り付けることもできるし、あるいはそのすぐ近くのポールや電柱を用いてそれを取り付けることもできる。ある出動要員が付加的に規定された平面Z1上に入るとただちに、第1の平面または第2の平面Z0もしくはZ1の情報に対する所要精度を簡単に実現することができる。
【0034】
図2には、3つの移動局3,7,10の間で通信の行われる様子が描かれている。この場合、基準トランシーバ2はモバイルトランシーバ3,7,10へ送信を行い、すべてのトランシーバは指令センタ受信機4へ送信を行い、さらにモバイルトランシーバ3,7,10は相互間で送信および受信を行う(各トランシーバ間の単方向矢印および双方向矢印を参照)。この場合、各モバイルトランシーバ3,7,10間の通信はいわゆるピアツーピアコネクションとして構成されており、つまり各局に対し同等の権利が与えられていて、データ伝送に対し同じチャンスが与えられている。したがって各局は受信可能なすべての局からすべてのデータを収集することができ、さらに再転送することができる。このことは、ある局が(たとえば遮断などにより)指令センタへのコネクションをもっていないときに有利である。
【0035】
図3には、この平面における位置特定の経過が描かれている。はじめに、定置されている基準トランシーバ2のポジションがロランCにより突き止められる。これに基づき、作戦開始時点に最初の出動要員の所在位置で仮想の基準点5と基準線6が確定され、これはロランCポジション測定と伝播時間測定(超広帯域)により行われる。出動中、モバイルトランシーバ3,7,10間の伝播時間ならびに基準トランシーバ2とモバイルトランシーバ3,7,10間の伝播時間および角度αが測定される。
【0036】
2次元の位置特定は、UWBデータを用いた三角測量と個々のロランCポジションへの結合により行われる。
【0037】
高さの測定のためには、別の基準点を決定する必要がある。高さ測定の精度に対し高い要求が課されないのであれば、移動ネットワークの特性を利用し個々のトランシーバを基準点として設定すれば十分である。(出発平面に関して)モバイルトランシーバの相対的な高さを測定するためには、高さ基準点を設定する必要がある。これは以下のようにして行うことができる。すなわちこの場合、第2の基準局を建物の外壁に位置決めするかまたは、ポールもしくは電柱に位置決めすることによって行われる。両方の局の基本線を基準線として用いることができる。
【図面の簡単な説明】
【0038】
【図1a】時点T=t0における出動の経過を示す図
【図1b】時点T=t1における出動の経過を示す図
【図1c】時点T=t2における出動の経過を示す図
【図1d】時点T=t3における出動の経過を示す図
【図2】個々の送受信機(トランシーバ)間の通信と伝播時間測定の様子を示す図
【図3】位置特定の経過を示す図
【特許請求の範囲】
【請求項1】
動員時に被監視領域(建物1)内の人員を位置特定する方法において、
超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機(4)を使用し、
動員中、前記送信機(2)を被監視領域内に位置固定して配置し、
前記送受信機(3)を位置特定すべき人員に取り付け、
前記受信機(4)を、被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置して該監視用コンピュータと接続し、
前記送信機(2)と前記送受信機(トランシーバ3)を、付加的に位置特定法ロランCに従い動作させ、ロランCにより求めた位置データを超広帯域で求めたデータと結合して補正することを特徴とする、
人員を位置特定する方法。
【請求項2】
請求項1記載の方法において、
被監視領域に少なくとも1つの別の位置固定された送信機(8)を設けることを特徴とする方法。
【請求項3】
請求項2記載の方法において、
前記別の送信機(8)を、位置固定された第1の送信機(2)により規定される平面外に配置することを特徴とする方法。
【請求項4】
請求項1から3のいずれか1項記載の方法において、
前記被監視領域を建物(1)の内部とし、位置固定された1つまたは複数の送信機(2,8)を、該建物(1)において容易に接近できる目立つ個所に取り付けることを特徴とする方法。
【請求項5】
動員時に被監視領域内の人員を位置特定する装置において、
超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機(4)が設けられており、
動員中、前記送信機(2)は被監視領域内に位置固定されて配置され、
前記送受信機(3)は位置特定すべき人員に取り付けられ、
前記受信機(4)は、被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置されて該監視用コンピュータと接続され、
前記送信機(2)と前記送受信機(トランシーバ3)は、付加的に位置特定法ロランCに従い動作し、ロランCにより求められた位置データが超広帯域で求められたデータと結合されて補正されることを特徴とする、
人員を位置特定する装置。
【請求項6】
請求項5記載の方法において、
被監視領域に少なくとも1つの別の位置固定された送信機(8)が設けられていることを特徴とする装置。
【請求項7】
請求項6記載の装置において、
前記別の送信機(8)は、位置固定された第1の送信機(2)により規定される平面外に配置されていることを特徴とする装置。
【請求項8】
請求項5から7のいずれか1項記載の装置において、
前記被監視領域は建物(1)の内部であり、位置固定された1つまたは複数の送信機(2,8)は、該建物(1)において容易に接近できる目立つ個所に取り付けられることを特徴とする装置。
【請求項1】
動員時に被監視領域(建物1)内の人員を位置特定する方法において、
超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機(4)を使用し、
動員中、前記送信機(2)を被監視領域内に位置固定して配置し、
前記送受信機(3)を位置特定すべき人員に取り付け、
前記受信機(4)を、被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置して該監視用コンピュータと接続し、
前記送信機(2)と前記送受信機(トランシーバ3)を、付加的に位置特定法ロランCに従い動作させ、ロランCにより求めた位置データを超広帯域で求めたデータと結合して補正することを特徴とする、
人員を位置特定する方法。
【請求項2】
請求項1記載の方法において、
被監視領域に少なくとも1つの別の位置固定された送信機(8)を設けることを特徴とする方法。
【請求項3】
請求項2記載の方法において、
前記別の送信機(8)を、位置固定された第1の送信機(2)により規定される平面外に配置することを特徴とする方法。
【請求項4】
請求項1から3のいずれか1項記載の方法において、
前記被監視領域を建物(1)の内部とし、位置固定された1つまたは複数の送信機(2,8)を、該建物(1)において容易に接近できる目立つ個所に取り付けることを特徴とする方法。
【請求項5】
動員時に被監視領域内の人員を位置特定する装置において、
超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機(4)が設けられており、
動員中、前記送信機(2)は被監視領域内に位置固定されて配置され、
前記送受信機(3)は位置特定すべき人員に取り付けられ、
前記受信機(4)は、被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置されて該監視用コンピュータと接続され、
前記送信機(2)と前記送受信機(トランシーバ3)は、付加的に位置特定法ロランCに従い動作し、ロランCにより求められた位置データが超広帯域で求められたデータと結合されて補正されることを特徴とする、
人員を位置特定する装置。
【請求項6】
請求項5記載の方法において、
被監視領域に少なくとも1つの別の位置固定された送信機(8)が設けられていることを特徴とする装置。
【請求項7】
請求項6記載の装置において、
前記別の送信機(8)は、位置固定された第1の送信機(2)により規定される平面外に配置されていることを特徴とする装置。
【請求項8】
請求項5から7のいずれか1項記載の装置において、
前記被監視領域は建物(1)の内部であり、位置固定された1つまたは複数の送信機(2,8)は、該建物(1)において容易に接近できる目立つ個所に取り付けられることを特徴とする装置。
【図1a】

【図1b】
【図1c】
【図1d】
【図2】
【図3】
【図1b】
【図1c】
【図1d】
【図2】
【図3】
【公表番号】特表2006−526144(P2006−526144A)
【公表日】平成18年11月16日(2006.11.16)
【国際特許分類】
【出願番号】特願2006−504962(P2006−504962)
【出願日】平成16年4月2日(2004.4.2)
【国際出願番号】PCT/EP2004/003509
【国際公開番号】WO2004/088350
【国際公開日】平成16年10月14日(2004.10.14)
【出願人】(505370132)
【出願人】(505370154)
【Fターム(参考)】
【公表日】平成18年11月16日(2006.11.16)
【国際特許分類】
【出願日】平成16年4月2日(2004.4.2)
【国際出願番号】PCT/EP2004/003509
【国際公開番号】WO2004/088350
【国際公開日】平成16年10月14日(2004.10.14)
【出願人】(505370132)
【出願人】(505370154)
【Fターム(参考)】
[ Back to top ]