
人間のような指を有するロボットハンド
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概してロボット工学に関し、より詳しくは、人間の形状因子内に適合して人間の手の指のように動きかつ振る舞うようにデザインされた指を含むロボットハンドに関する。
【背景技術】
【0002】
近年、非常に上手に人間をシミュレートする、または人間を真似るロボットの需要が高まっている。例えば、アニマトロニックなフィギュアは、できるだけキャラクターに近い状態でキャラクターを再現するようにデザインされたロボットシステムであって、多くのキャラクターは人間や人間に似たものである。アニマトロニックなフィギュアを提供するために使用されるロボットは、乗り物、アトラクション、ショー、小売展示及びエンターティメントな場の一部にディスプレイされている。これらの状況において、動きや力強さ(例えば、模倣されたキャラクターの動き)を作り出すための形状、器用さ及び能力の観点で、映画やアニメ映画のキャラクターを真似たアニマトロニックなフィギュアまたはロボットに関する要求がある。更に、ロボットを、例えば、歩行したり、ロボットハンドのフィンガーのようなもので物体を操ったりする身体能力を再現するようにデザインすることは有用である。たとえそのキャラクターが人間や、人間のような手及び指を有する、人間のような例えばアリ、鳥、モンスター等ではない場合であっても、多くのキャラクターは、手や指やそれに近い人間の特性や特徴を備えるように作られている。
【0003】
次第に、ロボットデザイナーや製造メーカは、エンターティンメントではない応用にて使用されるために、人間のような又は擬人化された特徴や能力を有するロボットシステムをデザインすることを要求されるであろう。これらの使用は、入院療法や理学療法の場における患者のケア、患者のホームケアのためにデザインされたロボット、または家事を行うロボットを含む。これらの応用において、ロボットシステムは有用で、しかも魅力ある方法で人間と相互関係をもつことが期待されている。一般に、ロボットは人間のように見えかつ人間がよく行う振る舞いをするときによりその魅力が見出され、手や指のような人間の特性や特徴を備える、人間のようなロボットシステムまたはロボットによって人間とロボットとの効果的な相互関係が提供されることが受け入れられている。
【0004】
エンターティメントや他の応用において、興味深くかつ重要な点はロボットハンドのデザインである。例えば、ロボットキャラクターのハンドは、たとえ、そのキャラクターが人間の手を有していなくても、典型的には、人間の手の形状、器用さ、動き及び機能を模倣することを試みてデザインされる。不幸にも、既存のロボットハンドのデザインがロボット人間ハンドを提供する際の全てのデザインに首尾良く適合するものではない。既に多くのエンドエフェクターのデザインが存在しているが、一般に、それらは、物体を掴むまたは挟むのに使用される単一の自由度を有する、単純な2本の指状の把持部または顎のバリエーションである。
【0005】
いくつかのロボットの“ハンド”が作製されているが、それらのデザインの中には2つの爪を有する把持部よりも人間の手に非常に類似しているが、典型的には器用さや形状といった点を欠いたものである。例えば、人間の指は4つの自由度(DOF)を有している(しかし、典型的には3つの自由度(DOF)だけが独立して制御される)。しかしながら、典型的にはロボットハンドは非常に少ないDOFしか有しておらず、いくつかのハンドは一つのハンドに対して一つの自由度を持つのみであり、器用さ及び運動能力が非常に限定されている。各指が独立して関節接合されるように一つの指に対して一つの自由度を備えたものが提供されるであろう。しかしながら、指の動きは、人間の手で見出されるよ
うな、各指の側方動作(左右動作)や指の部分またはディジットの独立した動きのない、自身を丸め込むような単純化された動きである。
【0006】
増加されたDOFを備える既存のロボットハンドは、非常に複雑であったり人間の形状に適合しなかったりする。例えば、ある既存のハンドデザインにおいては、指の形状に比較的良く適合したハンドに関して全部で24のDOFを備えているが、このハンドのデザインでは、ケーブル(または“腱”)及びアクチュエータの数がDOFの2倍、即ち48個必要となる。この結果、外見上人間の小さい手首及び前腕において大きな形状となってしまう。このハンドデザインにおける更なる問題は、指を駆動するのに使用されるケーブルや腱が固定された無潤滑金属や樹脂製のランナーをはみ出して深刻な摩擦や摩耗の問題を引き起こすことである。
【0007】
他のハンドは、各“フィンガー”に対して2つのディジットを有し、人間の形状因子(例えば、薄く延びた指、比較的小さな手首及び薄い手のひら)内で収めるには適さないプーリー及びアクチュエータメカニズムを使用する。特に、このハンドデザインにおいては、駆動ケーブルや腱に“n+1”の配列が使用され、それは必要なケーブルの数を減らすが、プーリーの配列はケーブルがその支持プーリーを360°以上に渡って巻き付けるようであり、それにはプーリーが厚くなることを要求し(例えば、概ねケーブルの厚さの2倍)、指の形状因子内で収めることは困難である。また、ケーブルは互いに交差し、ハンドを操作している間に互いに擦り合うので更なる摩擦や摩耗を引き起こす。更に、このハンドは、一本のフィンガーに対して4つのモータ駆動を必要とし、それはコスト、複雑さ、形状、及び、メンテナンスを増大させる。
【0008】
しかし、他のロボットハンドは、より厚いケーブルを使用し、かつプッシュ/プル配列を有するフィンガーを駆動するようにデザインされている。モータは、ハンドを支持するのに使用される手首の近くに配置される。手首を介して動力を伝達するために、フレキシブルな駆動シャフトが使用され、線形運動とは対照的な回転運動が手首を介して伝達される。この回転運動は、ハンドの手のひらに配置された送りネジによって線形運動に変換される。これにより、駆動シャフトの数はハンドの自由度の数に等しくなる(例えば、本デザインの一例として“12”)という利点が生じる。しかしながら、回転駆動ハンドの一つの欠点は、12個の送りネジをハンドの手のひらの内部に配置しなければならず、その結果、手のひらが大きく(即ち、人間のサイズよりも大きく)なってしまうことである。また、フィンガーのDOFを駆動させるためのプッシュ/プル配列における厚いケーブルの使用が“プッシュ”方向に付与される力の量を制限し、このロボットハンドのデザインの使用を制限してしまう。
【0009】
従って、人間の手の期待される機能を備えつつ、人間の形状因子に関連した課題を満たす、ロボットまたはロボットシステムのハンドデザインに関する要求がある。そのようなハンドデザインは人間の手とほぼ同数のディジットを有し、人間のような器用さと動きを備えたフィンガー(例えば、DOFとほぼ同数で動くフィンガー)を有することが好ましい。また、ロボットハンドのデザインは、比較的少ない構成要素を有し、かつ、ケーブル(または腱)の使用に関連する摩耗及び少ないメンテナンス問題に対処し得るものが好ましい。
【発明の概要】
【0010】
本発明は上記課題に関して、従来のハンド及び/またはフィンガーデザインに対して多
くの利点を有する、3つのディジットと人間のような形状及び動きとを備えるフィンガーを有するロボットハンドのデザインを提供する。ここに記載されたロボットハンドの実施形態は、人間の形状因子に適合する能力、所望のDOF(例えば、ロボットハンド内において配置または支持されるフィンガー当たり3つのDOF)、動作方法、ジョイントを正
確に制御する能力、物体を掴むために十分な力を与える能力、寿命(例えば、腱またはケーブルの摩擦や、さもなければ初期故障を引き起こしたり付加的なメンテナンスを強いたりする他の摩耗を低減する)を備える要素を提供している。
【0011】
以降において明かになるように、記載されたロボットハンドのいくつかの実施形態では3つのDOFフィンガーを駆動(例えば、4つのケーブル又はテンション要素を使用するn+1の駆動)するための最小の現実的な数のテンション要素(例えば、ケーブル、腱等)が使用される。これは、人間の手首の形状因子に制限された際に非常に制約された空間を提供する、2つの関節のあるフレキシブルな手首を介してケーブルまたは腱を引き回すときに重要な利点である。いくつかの実施形態におけるロボットハンドでは、フィンガーを駆動させるためのモータの最小数は減少したまたはそのままの数で使用される。モータは、複雑さ、コスト、パッケージング制約に関係し、それ故に、アクチュエータまたは駆動モータの数を低減することはより望ましいハンドのデザインとなる。さらに、ハンドの実施形態では、フィンガーのデザインが人間の形状因子に適合することを許容するプーリーのデザインが使用される。従来の多くのハンドのデザインは人間の形状因子の制約に適合することには強いられていなかったが、そのような制約は多くのアニマトロニックで且つ非エンターティンメントなロボットへの応用において要請されている。さらに、非潤滑要素上で摺動するケーブルに代えて、フィンガー自身におけるプーリー(例えば、ハンドの各フィンガーアセンブリのフィンガーディジットまたはセグメントに支持されたプーリー)の使用は、大きく摩擦を低減させかつ摩耗を減少させる(即ち、寿命を向上させる)。ハンドの実施形態では、フィンガー駆動のプレテンションまたはケーブル/腱の駆動を供給するための受動的な腱張力メンテナンスシステムが使用される。これは、関連するハードウェア、電子的な及びソフトウェアの複雑さ及びコスト高を伴う付加的なモータの使用を要する能動的アプローチと対照的である。しかも、ここで記載されたロボットハンドの実施形態では、アクチュエータ運動とフィンガージョイント運動との間における、典型的な固定された運動関係が使用される。
【0012】
より詳しくは、ロボットハンドは少なくとも一つのフィンガーアッセンブリを備えており、典型的にはより人間の手をシミュレートするために5つのフィンガーアッセンブリが含まれる。各フィンガーアッセンブリにおいて、ロボットハンドは、長尺状でかつフレキシブルなテンション要素(例えば、スチールケーブルまたはそれに類似のもの)に張力を与えるフィンガー駆動アッセンブリを備えている。各フィンガーアッセンブリは、駆動アッセンブリによるテンション要素の選択的な引っ張り/移動によって駆動または移動する一連のリンクまたはリンク部材を備えている。リンクは、3つのDOFを持つようにピボットジョイントで連結され、フィンガーアッセンブリは、リンク上に支持されフィンガーアッセンブリを介してテンション要素を支持及び案内するように配列されている一連のプーリーを含んでいる。テンション要素は、好ましくはプーリーの何れか一つに部分的に延びており、フィンガーアッセンブリは非螺旋状に巻回されているテンション要素で“n+1”駆動を利用する(ここで、“n”は、DOFであり、その値はテンション要素の数である)。
【0013】
いくつかのケースにおいて、前記プーリーは螺旋状の巻回を実行する装置に使用されるプーリーの高さの約半分のである。螺旋巻回システムでは、螺旋が形成されるように、いかなる溝もなく、または一つの幅広、平坦な溝を有さないプーリーが使用され、一方、他の応用では単一の螺旋状に切削された溝が使用される。どちらのケースにおいても、螺旋状のラッピングの使用は、プーリーの一面を横切るように延びるケーブルラップのための付加的な部屋を必要とする。これに対して、ここに記載されたいくつかの実施形態において、各ケーブルまたはテンション要素は、約1/4ラップ、つまり、90°接触している
状態で、各接触プーリーの周囲の1/2よりも少なく覆われている。一連のリンクは、(
例えば、人間の指に3つのディジットまたはセグメントをシミュレートするためには)第
1、第2及び第3のディジットまたはディジットリンクを含んでいる。そのようなケースでは、第3のディジットリンクは旋回中心可能に第2のディジットリンクに連結されており、第2のディジットリンクは、同様に、旋回中心可能に第1のディジットリンクに連結されている。第1及び第2のディジットリンクは、これら2つのリンクの各々で終端している一対のテンション要素またはケーブルがあれば、駆動アッセンブリによって独立して駆動または操作可能である。フィンガーアッセンブリには、第3のディジットリンクが第2のディジットリンクの動きによって駆動可能となるように第3のディジットリンクを第2のディジットリンクに連結するための付加的な連結器リンクが含まれている(例えば、第3のディジットリンクは第2のディジットリンクに対して従動またはスレーブリンクとして振る舞うように受動的に駆動されていてもよい)。
【0014】
また、ハンドは、手のひら要素またはプレート、ベースリンク部材、及び第1のディジット取付リンク部材を含んでいる。ベースリンク部材は、ハンド内にフィンガーアッセンブリを支持する手のひらプレートに固着されている。第1のディジット取付リンク部材は第1の軸を中心として旋回可能に(例えば、各回転方向において約40°または20°またはそれ未満の移動範囲で)ベースリンク部材に取り付けられており、第1のディジットは、第1の軸を横切るまたは直交するように延びる第2の軸を中心として旋回可能に(例えば、手のひらから離間する反時計周り方向については約15°未満の範囲内、及び、手のひらに向かう時計周り方向については約75°〜100°の範囲内で)第1のディジット取付リンク部材に連結されている。このように、フィンガーアッセンブリの第1のディジットの運動範囲は側方移動(側方移動)(例えば、第1の軸を通る垂直平面に関してプラスマイナス13°またはそれに近い値)、及び、小さな後方屈曲(例えば、第2の軸を通る水平面に関して15°未満)かつ大きな前方屈曲(例えば90°以上)を行う人間の指に類似している。第3のディジットリンクは第2のディジットリンクによってそれ及び第2のディジットリンクが人間の指に類似した後方屈曲によって直線状になるように駆動し、かつ、それ及び第2のディジットリンクが第1のディジットリンクの前方屈曲または丸くなることによって内側に向かって大きく丸まるように(例えば、握りこぶしを形成するまたは物体を握るように)駆動する。いくつかの実施形態においては、駆動アッセンブリは4つのテンション要素を所望のテンションに維持するための受動的な張力メンテナンスシステムを提供するように適応され、このまたは他の特徴は3つのアクチュエータ(例えば、駆動モータ)が少なくとも4つのアクチュエータよりも4つのテンション要素を作動または動作することを許容する。
【図面の簡単な説明】
【0015】
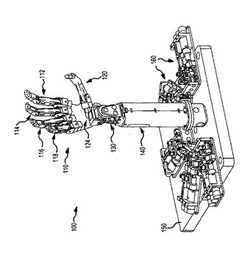
【図1】ロボットハンドまたはハンドアッセンブリ、手首、前腕、ロボットハンドの各フィンガーの駆動アッセンブリまたはメカニズムを示す図(即ち、本例では、5本のフィンガー及び5個の駆動アッセンブリを備えている)
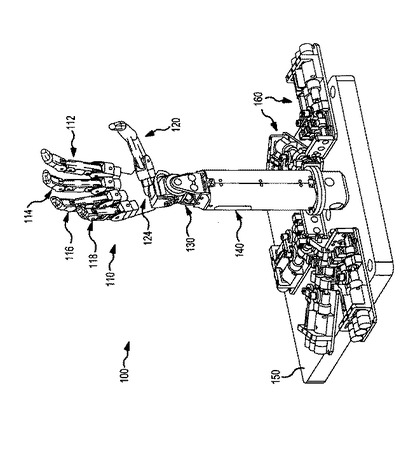
【図2】ロボットフィンガーまたはフィンガーアッセンブリの要素を示す図1のシステムのロボットハンドの拡大または詳細な斜視図であって、図1は、ロボットフィンガーまたはフィンガーアッセンブリの要素及び図1に示す手首に取り付けらえた支持プレートに取り付けられていることを示している。
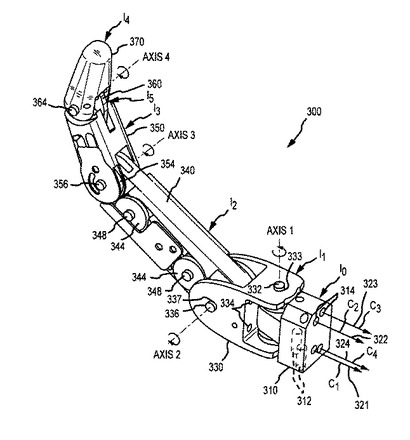
【図3】図1又は図2のハンドで使用される、本発明の一実施形態に係るロボットフィンガー又はフィンガーアッセンブリ。
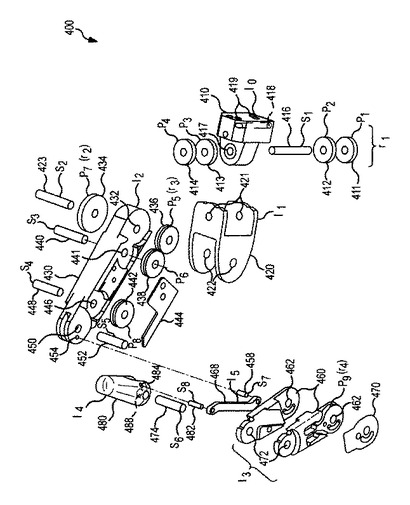
【図4】図1〜図3のフィンガーを実行するのに使用される、本発明の一実施形態に係るロボットフィンガー又はフィンガーアッセンブリ。
【図5】図1〜図4に示すフィンガーのように、フィンガー内に含まれた一連のプーリーまたはプーリーアッセンブリの部分分解図であって、それらは、プーリーのセットまたはアッセンブリを備えるフィンガーアッセンブリの操作をしている間にフィンガーを駆動または作動するのに使用される4本の腱またはケーブルを案内及び/または支持するために使用される。
【図6】図1〜図4に示すフィンガーのように、フィンガー内に含まれた一連のプーリーまたはプーリーアッセンブリの部分分解図であって、それらは、プーリーのセットまたはアッセンブリを備えるフィンガーアッセンブリの操作をしている間にフィンガーを駆動または作動するのに使用される4本の腱またはケーブルを案内及び/または支持するために使用される。
【図7】図1〜図4に示すフィンガーのように、フィンガー内に含まれた一連のプーリーまたはプーリーアッセンブリの部分分解図であって、それらは、プーリーのセットまたはアッセンブリを備えるフィンガーアッセンブリの操作をしている間にフィンガーを駆動または作動するのに使用される4本の腱またはケーブルを案内及び/または支持するために使用される。
【図8】ベース、または、所定の角度(例えば、腱の入力角またはそれに類似したもの)でフィンガーに腱を挿入またはケーブルを駆動する取付リンク(l0)の配列を示す図3のロボットフィンガーアッセンブリの側面図。
【図9】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図10】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図11】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図12】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図13】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図14】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図15】図1のシステムまたはそれに類似したロボットハンドシステム内に配置された/取り付けられた受動的な張力メンテナンスシステムの模式図。
【図16】図1のフィンガー駆動アッセンブリまたはメカニズムの一つの斜視図であって、一連の腱または駆動ケーブルに接続するフィンガーアッセンブリを独立して駆動するのに使用される。
【図17】図16のフィンガー駆動アッセンブリの図であって、本発明の実施形態に係るロボットハンドのフィンガーアッセンブリにおいて、一連の4本の腱または駆動ケーブルを供給するモータのセットによって駆動されるワイヤまたはケーブルを含む。
【図18】図1及び図2に示すハンドのように、本発明の実施形態に係るロボットハンドに使用される腱取付アッセンブリの部分的な模式図。
【図19】ロボットハンドの腱または駆動ケーブルを案内または支持するために使用されるフレキシブルな管の一実施形態を示す図。
【発明を実施するための形態】
【0016】
本発明の実施形態は、人間の手及び指に関して向上したシミュレーションとともに改良されたパフォーマンスを有するという、長年に渡って存在する要求に対処するロボットハンドシステムに関するものである。従前のロボットハンドは、人間の指(即ち、3つのセグメントまたはディジット)で見出されるようなジョイント及びディジット/セグメントよりも少ないジョイント及びディジット/セグメントを有するか、または、フィンガー、
手のひら、手首またはその他の部分が人間の形状因子に適合しないまたはふさわしくないような大きさ又は/及びデザインであった。ここで述べるロボットハンドシステムは、ハンド及び各フィンガーが人間の形状因子に適合しつつ多くのジェスチャーを作り出すことが可能となるように15の自由度(DOF)(即ち、1本の指につき3つのDOF)を有するハンドまたはハンドアッセンブリを提供する。各フィンガーまたはフィンガーアッセンブリにおいて、1本のフィンガーにつき4つのジョイントを駆動させるための、テンション要素(例えば、フレキシブルなスチールケーブルまたはワイヤ/ワイヤロープで形成された腱または駆動ケーブル)、結合、及びプーリーがあり、それらは人間のサイズ制限内に抑えつつ1本のフィンガーにつき3つのDOFを備えている。駆動は、4つのテンション要素が各フィンガーについて3つのDOFを駆動させるのに使用されるように、“n+1”のテンション要素または腱を使用する。この方法では、各フィンガーは、ユニークなプーリー及びテンション/駆動配列によって部分的に人間の指の形状を有し、各フィンガーは、人間のような器用さ、ジェスチャー、及び、ロボットハンドのフィンガーの3つのディジットまたはセグメントの動作範囲で駆動される。
【0017】
図1は、(モータ及びドライバが人間の形状因子である、腕、肩、または身体内に位置する状態ではない)プロトタイプの形態で示される本発明の一実施形態に係るロボットハンドシステム100である。図示するように、システム100は、ロボットハンドまたはロボットハンドアッセンブリ110と、手首130と、前腕140と、一連のフィンガー駆動アッセンブリまたはメカニズム160とを含んでいる。駆動アッセンブリ(またはモータドライブ)160は支持基材またはプレート150上に配置されるが、実際には、ロボットシステム100の前腕140上に配置されてもよいし、上腕(図示略)上に配置されてもよいし、胴体(図示略)中または胴体(図示略)上に配置されてもよい。図示しないが、多くの駆動ケーブルまたは腱(またはテンション要素と呼ばれる)は、(例えば、ハンド110のフィンガーを独立的に作動または駆動させるために)ハンドアッセンブリ110の部位に連結されるよう、駆動アッセンブリ160から前腕140及び手首130を介して延びている。
【0018】
システム100の要素は以下に詳述するが、ハンドアッセンブリ110は、図2に詳しく示されるように、5本のフィンガーまたはフィンガーアッセンブリ112,114,116,118,120を含んでいる。フィンガーアッセンブリ112,114,116,118,120はプレート124に強固に固着されており、プレート124は手首130及び前腕140とともに動くように手首130に取り付けられている。フィンガーアッセンブリ112,114,116,118,120はベースまたは次の第1リンク部材(例えば、後記の図面に表されるリンクlo)においてプレート124に固着されており、第
2リンク部材(例えば、後記の図面に表されるリンクl1)がベースまたは初期リンク部
材に取り付けられている。プレート124は、5本のフィンガーアッセンブリのうち1本のフィンガーアッセンブリ120(つまり、親指)が他のフィンガーアッセンブリ112,114,116,118とは相対的に異なる位置に配置されて人間の手のひらを再現する形状を成している。そして、フィンガーアッセンブリ112,114,116,118は半円周または他のパターン(例えば、ベースリンク部材が完全に平行に配列していない状態)に配列され、それにより、人間の手の配列に的確に適合し、かつフィンガーアッセンブリ112,114,116,118,120の所望の範囲の側方動作(左右動作)や他の動作が円滑になる。各駆動アッセンブリ160は、対応するフィンガー112,114,116,118,120を操作または駆動するように独立して設けられている(並行操作を含んでもよい)。よって、5本のフィンガーのシステム100において、5つの駆動アッセンブリ160が、ハンドアセンブリ110の5本のフィンガー112,114,116,118,120を駆動するために設けられている。
【0019】
次に、関連した駆動アッセンブリまたはモータ駆動メカニズム160を伴う5本のフィ
ンガーアッセンブリ112,114,116,118,120のうち一つのデザインについて説明する。そのような説明は、より人間に似たロボットハンドシステム100を提供するための、図1及び図2のシステム100に示されているいかなる駆動/フィンガー対に対しても適用される。さらに、システム100は、アッセンブリ160の駆動モータに電力を供給する一または一以上の電源を含んでおり、アッセンブリ160はフィンガー112,114,116,118,120ばかりでなく手首130や他のシステム100の部位を選択的に操作及び駆動するための一または一以上のコントローラによって操作される。そのような電源及びコントローラ装置は、発明を実施するために良く使用され、当業者において公知であって、本発明を限定するものではない。駆動モータの数(例えば、各フィンガーについて3個)、腱/駆動ケーブルのプレテンション、及び、他の特徴は本発明において重要であると思われ、それらについては以下に詳述する。
【0020】
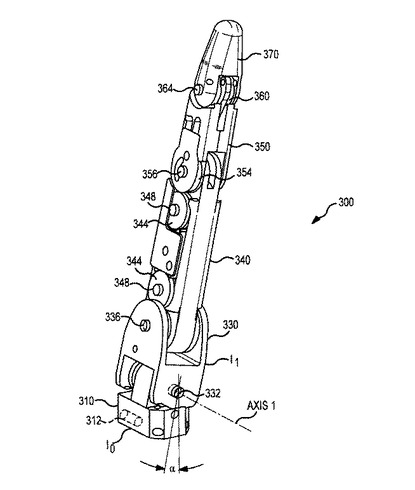
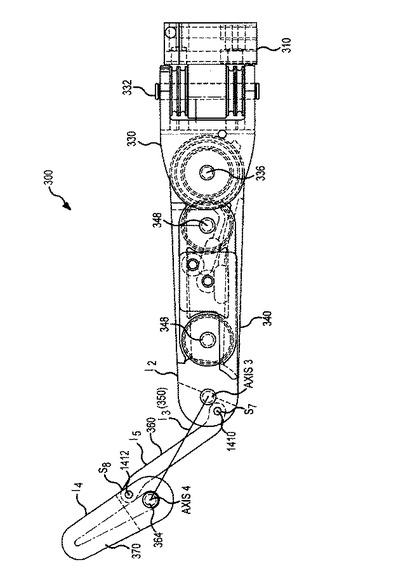
図3は、本発明の一実施形態に係るロボットハンド(図1及び図2のシステム100のハンド110)に使用されるフィンガーアッセンブリ300を示す。一般に、フィンガーアッセンブリ300は一連の6個のリンク(図において“l0”〜“l6”で表示されている)と8本のシャフト(または図において“s0”〜“s8”で表示されているピボットピン/軸線であって、ピボット軸線はシャフトの長手軸線を通るまたは沿うように描かれている)とで構成されている。さらに、リンク又はリンク部材内に配置され、腱またはテンション要素(例えば、スチール駆動ケーブルまたはそれに類似した部材)を支持するために使用される9個のプーリー(図において“p1”〜“p9” で表示されている)
があり、それらは3つのDOFを有する3つのディジットの動きを含んだ使用時においてフィンガー300を駆動するために使用される。
【0021】
図3に示すように、フィンガーアッセンブリ300は取付孔312を介して取り付けられるベースまたは初期リンク部材(リンクはリンク部材と同じように用いられる)310を含み、取付孔312はハンドプレートに対してネジ孔、圧入レセプタクル等で形成されている。ベースリンク(即ち、リンクl0)は、4つのケーブル案内チャネルまたは通路314を含み、アッセンブリ300は図に示されるように、次のリンク部材330(リンクl1)及びチャネルまたは通路334にチャネルまたは通路314を通って延びる4本のケーブル321,322,323,324(図においてc1からc4で示されている)によって作動または駆動する。リンク部材330は該リンク部材330(及び図4において説明する4個のプーリー)の孔333内を通って延びるシャフトまたはピン332を介してベースリンク310に対して旋回可能に配置されている。リンク部材330(リンクl1)及びベースリンク310へのリンク部材330の旋回配置またはジョイントは、ある程度、シャフト332(または軸線1)の周りでの側方旋回(左右旋回)または動きを有する人間の指の関節の機能を再現する。
【0022】
さらにフィンガーアッセンブリ300は、人間の指の第1のディジットに類似した細長いリンク部材(リンクl2)340を含んでいる。リンク部材340は、リンク部材340及びリンク部材330の本体内の一対の孔337を貫通するシャフト336を介して第1の端部においてリンク部材330に対して旋回可能に配置されている。リンク部材330の本体はリンク部材340の前記第1の端部の両側部の周囲を延びるように配置されている。リンク部材340(リンクl2)は、テンション要素によって作動するとシャフト336(軸線2)の周りで旋回する。リンク部材340は、リンク部材340の本体上で支持シャフト348の周りで旋回する一連のプーリー344を支持している(例えば、一連のプーリー344は、図4の分解図に示されるように、フィンガー300を駆動するのに使用されるテンション要素を案内及び支持する、4つのプーリーを含んでいる)。
【0023】
リンク部材340の第2の端部において、フィンガーアッセンブリ300は人間の第2のディジットに類似した別のリンク部材(リンクl3)350を含んでいる。リンク部材
350は、軸線3の周りで旋回するようにピンまたはシャフト356を介してリンク部材340に対して旋回可能に配置されている。従って、ケーブルまたはテンション要素321〜324が作動されたとき、フィンガーアッセンブリ300では、ディジット/リンク部材340に対して相対的にディジット/リンク部材350がシャフト356(軸線3)を中心として独立した動きを生じる(例えば、人間の指のように、第2のディジットは、第1のディジットが動かない状態で動き得る、または第1のディジットが握りこぶしの状態に動くのに伴い動き得る)。一又は一以上のプーリー354はリンク部材350上に、または同リンク部材350の一部として設けることができ、図4はリンク部材350の本体の一部分として形成された単一のプーリー(即ち、p9)を示している。さらに、フィンガーアッセンブリ300は、人間の指の第3のディジットに相当するリンク部材370であって、ピン364を介して第2のディジットまたはリンク部材350に対して旋回可能に配置された別のリンク部材370を含んでいてもよい。軸線4またはシャフト364の周りでの旋回は、リンク部材360(リンクl5)を介したリンク部材350の動きに関係しており、リンク部材360は、両リンク部材340,370に対して旋回可能に取り付けられている。
【0024】
フィンガーアッセンブリ(例えば、組み立てられたフィンガー300)のフィンガーのデザイン及び操作を良く理解するために、分解したロボットハンドアッセンブリを使用してフィンガーの一つの有用な配列を示すことは有用である。図4は、本発明に係るハンドアッセンブリに使用される(及びフィンガー300のために使用されるが、他のプーリーの配列、リンク部材の構成及びデザインの変更がフィンガーアッセンブリ300の機能を提供するように使用されてもよい)単一のフィンガーまたはフィンガーアッセンブル400の分解図を示す。フィンガー400のベースリンク410(リンク部材l0)は(図1及び図2のプレート124のように)取付孔418を有する手のひらプレートに取り付けられている。隣のリンク420(リンク部材l1)は図示されるように2重のU字型金具の形状を有する。リンク420は、孔421及び軸線1のシャフト416(シャフトまたはピンs1)を介してベースリンク410に対して孔/通路417を中心に旋回可能に連結されており、また、リンク420は、孔422及び軸線2のシャフト423(シャフトまたはピンs2)を介してリンクまたは第1のディジット(リンク部材l2)430に対して旋回可能に連結されている。
【0025】
リンク460(リンク部材l3)は単一部材または図に示すように二分割部材として構成されたものであって、リンク460は人間の第2のディジットに相当する。リンク460は、リンク430,460の孔450,462をそれぞれ貫通する軸線3のシャフト(シャフトまたはピンs5)を介して第1のディジットリンク430に旋回可能に配置されている。さらにフィンガー400は、人間の指に類似したフィンガー400の第3のディジットを提供するリンク480(リンク部材l4)を含んでいる。リンク480は、第3のディジットリンク480の孔488及び第2のディジットリンク460の半分の孔472を貫通して延びる軸線4のシャフト(シャフトまたはピンs6)に対して旋回可能に配置されている。
【0026】
第2のディジットリンク460と第3のディジットリンク480との動きを結合するために使用されるリンク468(リンク部材l5)が付加されている。リンク468は、リンク430,480の孔454,484を貫通するシャフト458,482(シャフトまたはピンs7及びs8)を中心に旋回可能に配置されている。また、リンク468はその基端部において孔454を介して第1のディジットリンク430に対してピンまたはシャフト458によって旋回可能に取り付けられている(先端部においてはシャフト482を介して第3のディジットリンク480に取り付けられている)。この取付配列の結果、第3のディジットリンク480の動きは第2のディジットリンク460の移動または動きと連動する(例えば、リンク480はリンク460に対して内側に丸まりリンク460に対
して直線状になるが、第2のディジットリンクとは独立していない)。
【0027】
上述したように、本発明の実施形態に従い形成されたフィンガーは、一連のプーリーとテンション要素とが人間の指の形状因子内に収まるまたは位置するように、一連のプーリーとテンション要素とで駆動され。例えば、フィンガー400は典型的には(図16に示されるアッセンブリ160のような)駆動アッセンブリによって引っ張られ、そして、動く腱またはケーブルを使用して駆動される。ケーブルは図4に示されていないが、ベースリンクまたは取付ブロック410の孔419を貫通しており、リンクの終端または連結のためのフィンガー400の一部として示されるプーリーに渡って延びている(4本ケーブルの各々は、次の図を参照して後述する)。一実施形態において、スチールケーブル(例えば、SAVAインダストリ2024SN等)がテンション要素に使用される。スチールケーブルはフィンガー400内のプーリーを操作する。また、第1のディジットリンク430または第2のディジットリンク460のいずれかにおいて終端している。
【0028】
図4に示すように、プーリー411,412,413,414(プーリーp1〜p4)はそれぞれ軸線1のシャフト416(シャフトまたはピンs1)上の単一溝の遊動プーリーであって、軸線1のシャフト416(シャフトまたはピンs1)は孔または通路417を介してベースリンク410を通って延びている。プーリー436,434(プーリーp5,p7)は軸線2のシャフト423(シャフトまたはピンs2)に支持され回転し、軸線2のシャフト423は第1のディジットリンク430の第1の端部または基端部にある孔432を通って延びている。プーリー436は2重溝の遊動プーリーであり、一方、プーリー434は単一溝の遊動プーリーである。また、プーリー438(プーリーp6)は2重溝の遊動プーリーであって、プーリー436に最も近い第1のディジットリンク430の孔441を通って延びるシャフト440(シャフトまたはピンs3)に支持され回転する。プーリー442(プーリーp8)は2重溝の遊動プーリーであって、第1のディジットリンク430の第2の端部または先端部にある孔446を通って延びている。このデザインにおいて、プーリーp9は第2のディジットリンク460の本体の半分に加工されている(しかし、軸線3のシャフト452(シャフトs5)に支持され回転する場合においては、単独の遊動プーリーとしてデザインされるであろう)。保持または案内プレート444,470は、第1及び第2のディジットリンク430,460上のプーリー及び/またはケーブルを保持するために設けられている。
【0029】
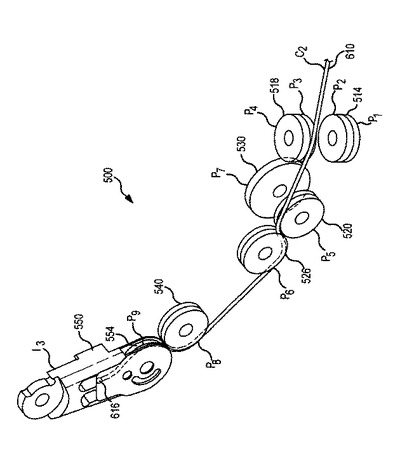
ここで記載したロボットフィンガーの実施形態は、“n+1”配列で、一般に、4本の腱またはケーブル(例えば、スチールケーブル等から形成されているテンション要素)を介して操作される。つまり、テンションを維持する4つの腱は各フィンガーの3つの自由度(DOF)を作動させるのに使用される。図5〜図7は、本発明のロボットフィンガー内における、典型的な腱またはケーブルの経路及び/または終端または取り付けを説明するための、プーリーのセット及び第2のディジットリンクを示すロボットのフィンガーアッセンブリ500の部分図を示している。4本のケーブルまたは腱は“c1”〜“c4”
の符号で示され、それらはフィンガー300を作動させるのに使用される、図3に示されたケーブルである。図に示すように、フィンガーアッセンブリ500(例えば、フィンガー300,400でも良い)に関する一連のプーリーのセットは、9個のプーリー要素514,518,520,526,530,540,554を含んでおり、幾つかのプーリーは図に示すようなプーリーp1〜p9を提供すべく、単一軌道プーリー及び2重軌道プーリーである(例えば、プーリー要素またはプーリー514は要素518のように2つの個別のプーリーである一方、要素520,526,540は2重溝プーリーである)。
【0030】
図5は、ケーブルまたは腱510(またはケーブルc1)、フィンガー500のプーリーアッセンブリにおけるケーブルまたは腱510(またはケーブルc1)の軌道、及び、第2のディジットリンク550(リンクl3)の本体上の終端点558を示す。リンク5
50における終端点558から、ケーブルまたは腱510はプーリー554の周囲を通り、プーリー540における2つの軌道の一方に接してプーリー540の反対側を通ってSの字を形成している。ケーブルまたは腱510は、プーリー526に連続して(再び軌道の一つに接し)、2つの軌道の一つに対してプーリー520の反対側の周りを通って別のS字状を巻く。ケーブルまたは腱510は、プーリー514への接触を維持するようにフィンガーの内側に向かって僅かに傾斜させるプーリー要素514のプーリーp2部分に連続している。ケーブル510はプーリー520,526,540の内側溝または軌道を使用することに注意されたい。また、重要なこととして、図5に示されたケーブルの軌道は、いかなる螺旋(プーリーを全周すること)を形成する必要はなく、代りに、ケーブル510が(プーリーと腱510との間の接触角度が180°以下で、しばしば90°以下になるように)プーリーを部分的に覆っていることが必要である。これにより、フィンガー500の一連のプーリーの必要な数は増加するが、摩擦量は減少し、フィンガーが人間の指の形状因子に一致するようになる(例えば、縮小化が容易となる)。
【0031】
図6は、腱610(ケーブルc2)が一連のプーリーを通っているフィンガーアッセンブリ500を示す。腱610は、腱510(ケーブルc1)に対しプーリー554の反対側上の終端または取付位置616において第2のディジットリンク550にて終端していることが示されている。プーリー554の周りが部分的に覆われ、プーリー540の反対側にS字が形成される。腱610はプーリー526を回って連続し、プーリー520上を通って別のS字を形成する。腱610は、プーリーp3への接触を維持するために微小な傾斜を形成するプーリー518に連続している。図に示すように、腱610は、プーリー520,526,540の外側溝を使用し、腱610は、フィンガーアッセンブリ500のどのプーリーの周りにも完全には通っていないが(即ち、螺旋は形成されていない)、軌道や溝に接触する各プーリーの一部分に接触している。プーリーp1,p2,p3,p4は独立して回転できる別々のプーリーであることに注意されたい(2つのプーリーにおける4つの異なった溝ではない)。
【0032】
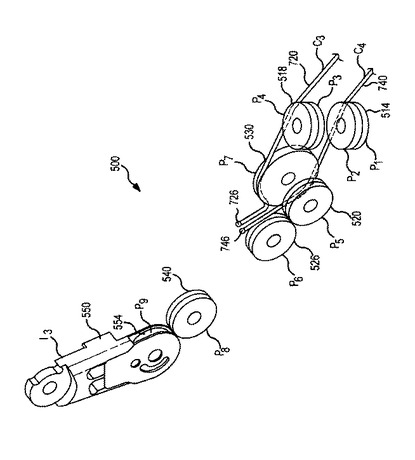
図7は、腱720,740(ケーブルc3,c4)が一連のプーリーを通るフィンガーアッセンブリ500を示す。腱720は、第1のディジットリンクl2内の符号“726”の位置において終端している(図7において、ケーブル軌道を図示し易くするために示されていないが、フィンガーアセンブリ400のリンク430またはアセンブリ300のリンク340である)。腱720はリンクl2からプーリー530の一部分に渡って延びている。腱720は、プーリー要素518のプーリーp4上に連続しており、腱720は、プーリー要素518への接触を維持するためにフィンガー500の内側に向かって微小に丸まっている。また、腱740(ケーブルc4)は符号“746”において第1のディジットリンクl2上で終端しているが、腱740は腱720に対しプーリー530の反対側上に連続している。腱740は、プーリーp1まで軌道化されており、腱740はプーリーp1への接触を維持するためにフィンガー500の内側に向かって微小に丸まっている若しくは曲がっている。さらに、ケーブルはフィンガー500のいかなるプーリーの周りで螺旋状に丸まってはいないし、ケーブルが互いに擦れ合っていなく、その結果、摩擦が低減され、フィンガー500の寿命が向上する。
【0033】
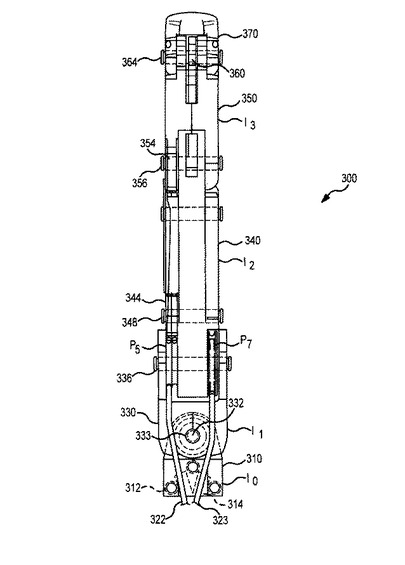
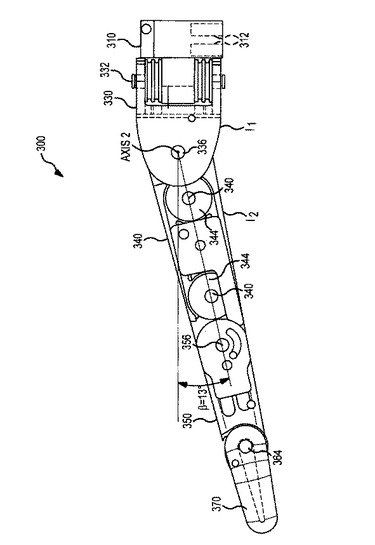
図8は、図3のフィンガーアッセンブリ300の正面図を示す(図3及び図4に示すプーリーの配列及びケーブルの配置がそれぞれデザインされている)。アッセンブリ300は、リンク部材330(リンクl1)のプーリー及び第1のディジットリンク340のプーリー(即ち、リンクl2上に支持されたプーリーp5及びp7)に接する、ベースリンク部材310の孔または通路314に延びるケーブル322,323を含むように示されている。図示されるように、ブロックまたはベースリンク310内のケーブル案内孔または通路314は、リンク本体310の正面または側面から外側に傾いており、ケーブル322,323は腱c1〜c4で形成されたプーリーp1,p2,p3,p4の周りの微小
な丸まりを収容するように受け入れられている(図8においてはケーブル322,323のみが見えている)。この傾きは各プーリーp1〜p4の部位とケーブルc1〜c4との間の所望の接触を維持するのを補助している。
【0034】
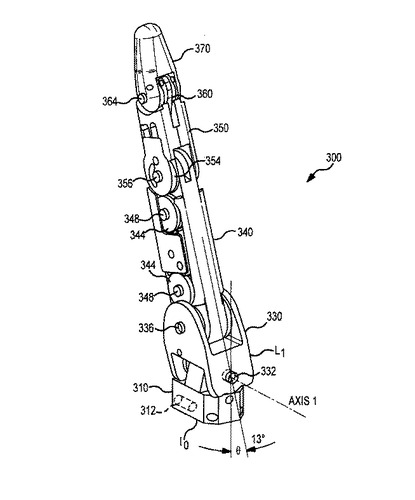
本発明に係るフィンガーの実施形態は、フィンガーアッセンブリ300にて適用されるように、人間の指にて見出される又は得られる運動範囲と類似した、各フィンガーのディジット/セグメントの運動範囲を備えるようにデザインされる。図9〜図14は、ジョイントの配列、及び、プーリーを含むテンション要素またはケーブルの駆動アッセンブリによる動作を通しての作動によって得られる様々な位置または操作モードにおけるフィンガーアッセンブリ300を示している。特に、図9及び図10は、人間の指の関節において見出されるようなフィンガーアッセンブリ300に関する側方範囲(左右範囲)の動きを示す。例えば、図9は第1の側方位置(最左位置)におけるフィンガー300を示し、図10は第2の側方位置(最右位置)におけるフィンガー300を示す。これらの図は、フィンガー300のピンまたはシャフト332の周りで側方へ最大に旋回または軸線1を中心に最大に回転したときのリンク330(リンクl1)を示す。
【0035】
図9は、最大回転角度θ、つまり、図に示すように例えば13°といった、20°よりも小さい最大回転角度θでの回転を示す(負又は正の回転であり、この図9での回転は、負の方向の回転、すなわち図9において反時計周り方向の回転である)。図10は、別のまたは反対方向における、最大回転角度αでの回転を示す(例えば、軸線1を通って上方向に延びている直交面に対する時計方向角度または正の回転角度)。互いに他の方向に対する回転が同じ大きさで対称な側方移動(左右移動)であってもよいし、異なった大きさであってもよい。一例として、回転角度αは、図に示すように、20°よりも小さい、または13°である。図9および図10では軸線1を中心とする、リンクl0に対するリンクl1の運動範囲はプラスマイナス約13°である。運動の最大時において、リンクl1とリンクl0とがそれらの平坦部において接触する(例えば、リンク330の本体の一部がピン又はシャフト332の周りでのリンク330の回転を制限または停止させるように作用するブロックまたはベースリンク310の隣接面と隣接または接触する)。
【0036】
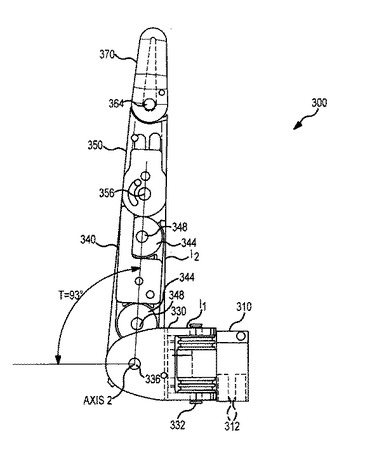
図11及び図12は、第1及び第2垂直位置(例えば、リンク330におけるピン336を通る水平面に対する位置)におけるフィンガーアッセンブリ300を示し、図11は傾斜した後方位置におけるフィンガー300(手のひらプレートから離間する方に曲がった第1のディジットリンク340)を示し、図12は十分に前方に傾斜したフィンガー(手のひらプレートに向かって内側に曲がった第1のディジットリンク340)を示している。人間の手の指は、後方または手のひらから離間する方向に大きく伸びることはなく、その結果、フィンガー300は、図11に示すように、約20°(反時計方向またはピン336を中心とした負の回転方向)よりも小さいような比較的小さな回転角度β、一例として13°で最大後方屈曲に関連した第1の垂直位置を有する。また、この位置において、フィンガー300のディジットはリンク340,350,370でほぼ真っ直ぐまたは直線状であり、いくつかの場合において、縦軸がほぼ平面上に配列し、第2のディジットリンク350及び第3のディジットリンク370は人間の指に類似して第1のディジットリンク340よりも大きく後方にアーチ状になる。この垂直位置への移動は、リンク330またはリンク340上のストッパで制限され、または、いくつかの場合において、この方向の移動は、テンション要素またはケーブルの操作によって(或いは駆動モータの操作によって)制限される。
【0037】
反対に、人間の指は、握りこぶしを形成したり物体を握ったりするために手のひらに対して内側に向かって丸めることができる。このことを考慮して図12に示すように、フィンガーアッセンブリ300は第1のディジットリンク340(またはリンクl2)がピン
またはシャフト336(軸線2)の周りで比較的大きな回転角度τで回転することが許容
されており、例えば、第2の垂直位置へ時計周り方向で、少なくとも約75°、より典型的には少なくとも約90°(図では93°)で回転することが許容されている。これらを考慮した場合、図11及び図12は、軸線2の周りでのリンクl1に対するリンクl2の運動範囲を示し、この範囲は、負側に約13°(反時計周り方向)で、正側に約93°(時計周り方向)若しくはそれ以上の範囲である。
【0038】
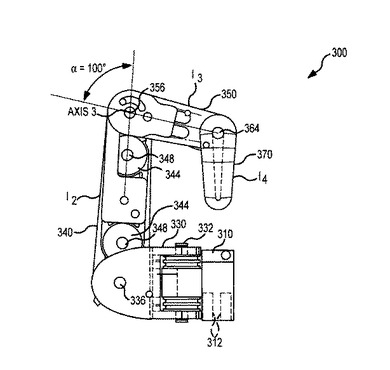
上述したように、第2のディジットリンク350(リンクl3)は、第1のディジットリンク340(リンクl2)に対して独立して駆動する。図13は、ピン356または軸線3を中心として正の回転方向(時計方向)角度αで回転した第2のディジットリンク350が内側に閉じるまたは十分に丸まった状態のフィンガーアッセンブリ300を示し、角度αは約90°で、より典型的には少なくとも約100°である。換言すれば、第2のディジットリンク350は軸線3またはシャフト356を中心として約0〜100°の運動範囲を有する。
【0039】
いくつかの実施形態においては、第3のディジットリンク370(リンクl4)はスレーブ連結としての第2のディジットリンク340(リンクl3)に結合している。図13に示すように、第3のディジットリンク370(リンクl4)はリンク340(リンクl3)に対してまたはリンク340(リンクl3)とともに回転する。図14は、リンク360(リンクl5)を見やすくするために第2のディジットリンク350またはl3がラインで示されているフィンガーアッセンブリ300を示す。この第3のディジットリンク370の回転は受動的な結合回転であって、第1のディジットリンク340(リンクl2)に対する第2のディジットリンク350(リンクl3)の回転に応じたものである。図14から理解されるように、リンク360(リンクl5)はシャフトまたはピン1412(シャフトs8)で第3のディジットリンク370(リンクl4)に対して旋回し、かつ、シャフト1410(シャフトs7)で第1のディジットリンク340(リンクl2)に対して旋回する。シャフト1410(シャフトs7)とリンク340上の軸線3との間の距離は、シャフト1412(シャフトs8)とリンク370上の軸線4との間の距離の約1.3倍以下に設定されている。この種の結合はプーリーやケーブルを使用して成されていることに注意されたい。
【0040】
各フィンガージョイントの運動は各腱の運動に関係している。軸線1,2,3周りでの関連するリンク運動に対応する各ジョイント位置をそれぞれq1,q2,q3で示す。各ジョイントの速度を
【0041】
【数1】

で示し、その単位はラジアン/秒である。
各ケーブルの速度は
【0042】
【数2】
で示し、その単位はメートル/秒である。各プーリーの半径がメートルで与えられた場合、次の関係が成立する。
【0043】
【数3】
ここで、腱の運動は独立していないことに注意されたい。即ち、4つの腱が引っ張られた状態のままであるならば、3つのジョイント速度は4つの腱の速度で定義される。特段の定めが記載されていない限り、4つの腱速度のうち3つが指定されれば、4番目の腱速度が上記の式によって定義される。速度が前記式によって定義された関係から過度にずれていたら、腱が延びてしまっているか、若しくは張力を失っているかであろう。
【0044】
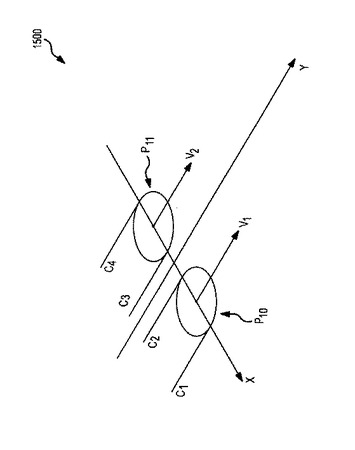
上記で注意したように、腱やケーブルの運動は独立していない。フィンガー腱を操作する方法の一つは、各腱を独立したリニアアクチュエータに連結することである。この場合、4つのアクチュエータの運動は、上記式を維持しかつ同時にケーブルの張力を維持するために調整される必要がある。別の方法は、たった3つのアクチュエータまたはモータがここで記載されたロボットハンドの各フィンガーを駆動するのに必要となるようこの関係を実行するメカニズムを使用することである。そのようなメカニズム1500は、受動的なテンションメンテナンスメカニズムとして考えられ、図15に模式的に示す。ここで、腱c1,c2はプーリーp10によって支持されるループを形成する。腱c3,c4はプーリーp11によって支持されるループを形成する。その所望の関係は、図15に示すようにプーリーp10,p11の軸線がy軸に対して並行に延びるように強いるメカニズム(図示しない)を介して実行される。この軸線に沿った各プーリーの速度v1,v2は等しく且つ反対である(即ち、v1=−v2)。
【0045】
この場合、腱マッピング式に対する前記ジョイントの運動学的な関係が成立し、4つの腱のうち3つの腱が、フィンガーを駆動するための、制御されたアクチュエータまたは駆動モータを介して駆動される必要がある。プーリーp10,p11の初期位置は、ケーブルに初期張力があり、その後その張力が受動的に維持されるように設定される。腱c1,c3,c4はアクチュエータm1,m2,m3を使用して駆動される場合、正の運動の方向も同様に、次の関係が存在する(位置はメートルの単位を有し、文字/記号の上にドット無しで示し、速度
【0046】
【数4】
は文字/記号の上にドット有りで示しメートル/秒の単位を有している)。
【0047】
【数5】
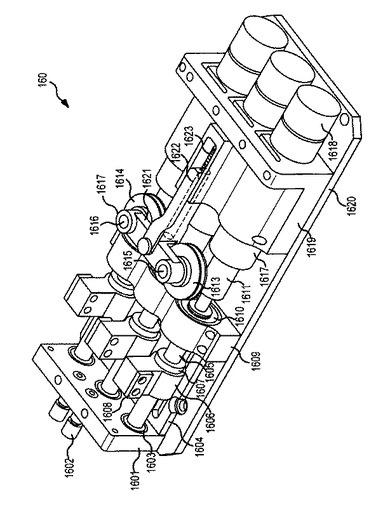
図16は、フィンガー駆動アッセンブリまたはメカニズム160を示し、このメカニズム160は、3つのアクチュエータ(または、例えば、駆動モータ)が4つのテンション要素または腱/ケーブルを操作または駆動するのに使用されることを許容する、上述した受動的な張力メンテナンスメカニズムを実行するように適合されている。システムまたはアッセンブリ160は、モータハウジング1619内に設けられたブラシレス直流モータ等を有する3つのアクチュエータ1617を含んでおり、アクチュエータ1617はベースプレート1620上に列状に固着されている。各モータ1617は、いくつかの適用において、連結されたフィンガーアッセンブリの正確な制御のために回転位置を記録し決定するエンコーダ1618を備えている。各モータ1617の出力シャフトはフレキシブルなカップリング1611を介して送りネジ1605に連結されており、カップリング1611は駆動シャフトと送りネジ1605との間のズレを調整するように適合されている。送りネジ1605は前部軸受け1603と後部軸受け1610とによって支持されており、送りネジ1605に加わるスラスト荷重を受けている。
【0048】
送りネジ1605はナット1607を駆動し、ナット1607はブロック1606に配置されている。このブロック1606は、溝付きプレート1604に係合する“タング(凸部)”によって回転を阻止される。一実施形態において、溝付きプレート1604はアセタールで形成されており、低摩擦滑り面を備える。各ブロック1606には、線形運動が伝達されるケーブル腱を固定するのに使用されるクランププレート1608が設けられている。受動的な張力メンテナンスメカニズムはシャフト1615,1616を介して旋回アーム1621に配置された2つのプーリー1613,1614を備えている。旋回アーム1621はリンク1622上を旋回し、リンク1622はモータマウント1619のスロット内をスライドするように制約されている。リンク1622の運動はモータマウントブロック1619の孔に挿通されたテンションネジ1623によって制約されている。アーム1621の旋回運動は、フィンガーの運動範囲である式v1=−v2の制約に非常に近い。
【0049】
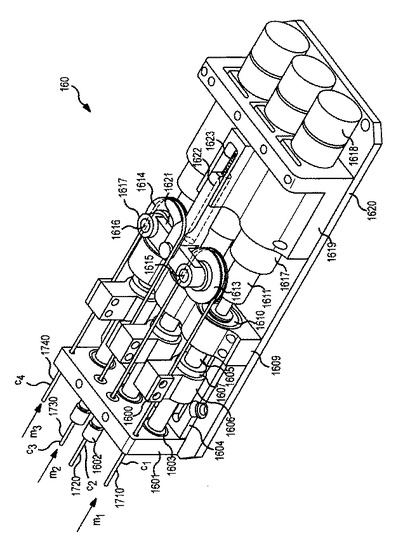
図17は、受動的な張力メンテナンスメカニズムを通じて軌道化された腱またはケーブル1710,1720,1730,1740(ケーブルc1〜c4)を有するフィンガー駆動メカニズム160を示す。ケーブル1710,1720,1730,1740は、ベアリング支持ブロック1601に形成された孔を通ってプーリー1613,1614まで延びている。張力ネジ1623を締め付けることによって、フィンガー腱1710,1720,1730,1740が引っ張られる。ベアリング支持ブロック1601上の付加的な調整器1602は、送りネジナット1607に対してフィンガージョイントの位置を微調整するために使用される。
【0050】
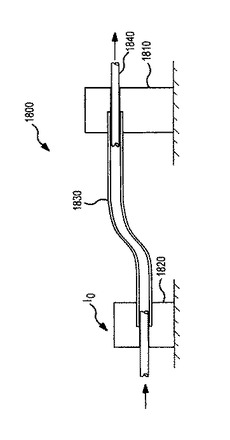
前述したように、フィンガーアッセンブリとフィンガー駆動アッセンブリとの間の腱またはケーブルの長さは一定であると仮定した。しかしながら、駆動アッセンブリ及びフィンガーアッセンブリは手首のジョイントの反対側に配置されており、ケーブルの長さは一定ではない。このような実施をサポートするために、フレキシブルな腱の管が、一定の長
さという制約を維持するのに使用される。例えば、図18は、フレキシブル管1830を有するケーブルまたは腱連結アッセンブリ1800を示し、フレキシブル管1830はその一端が駆動アッセンブリにおいてベアリング支持ブロック1810に取り付けられ、他端がベースリンク1820(フィンガーアッセンブリのリンクl0)に取り付けられてい
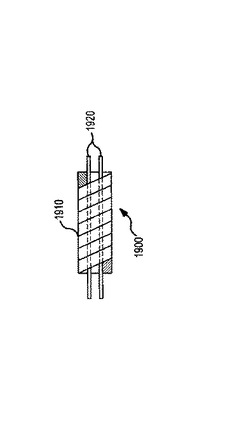
る。ケーブル腱1840はこの管1830を通して延びている。管1830は腱1840における張力の大きさと等しい圧縮負荷を支持する。図19は、フレキシブル管1900の一実施例を示しており、図に示すように、本実施形態では滑らかな内側面及び外側面を有するという利点を備える、ステンレスワイヤまたはコイル(例えば四角状ステンレスワイヤまたはコイル)1910で形成される管1900が利用されている。管1910は、グラスファイバー含浸テフロン(登録商標)ライナーチューブ等1920で内面を覆われており、スチール腱(例えば、腱1840)と管1910(または管1830)との摩擦を低減する。さらに、これらの要素間の面はテフロン(登録商標)または他の潤滑剤を使用することによって滑らかになっている。
【0051】
本発明はある程度の具体性を有して記述及び例示したが、ここでの開示は一例に過ぎず、部品の組み合わせ及び配列を多く変化させることによって本発明の精神および範囲から外れることなく当業者によって使用され得る。
【技術分野】
【0001】
本発明は、概してロボット工学に関し、より詳しくは、人間の形状因子内に適合して人間の手の指のように動きかつ振る舞うようにデザインされた指を含むロボットハンドに関する。
【背景技術】
【0002】
近年、非常に上手に人間をシミュレートする、または人間を真似るロボットの需要が高まっている。例えば、アニマトロニックなフィギュアは、できるだけキャラクターに近い状態でキャラクターを再現するようにデザインされたロボットシステムであって、多くのキャラクターは人間や人間に似たものである。アニマトロニックなフィギュアを提供するために使用されるロボットは、乗り物、アトラクション、ショー、小売展示及びエンターティメントな場の一部にディスプレイされている。これらの状況において、動きや力強さ(例えば、模倣されたキャラクターの動き)を作り出すための形状、器用さ及び能力の観点で、映画やアニメ映画のキャラクターを真似たアニマトロニックなフィギュアまたはロボットに関する要求がある。更に、ロボットを、例えば、歩行したり、ロボットハンドのフィンガーのようなもので物体を操ったりする身体能力を再現するようにデザインすることは有用である。たとえそのキャラクターが人間や、人間のような手及び指を有する、人間のような例えばアリ、鳥、モンスター等ではない場合であっても、多くのキャラクターは、手や指やそれに近い人間の特性や特徴を備えるように作られている。
【0003】
次第に、ロボットデザイナーや製造メーカは、エンターティンメントではない応用にて使用されるために、人間のような又は擬人化された特徴や能力を有するロボットシステムをデザインすることを要求されるであろう。これらの使用は、入院療法や理学療法の場における患者のケア、患者のホームケアのためにデザインされたロボット、または家事を行うロボットを含む。これらの応用において、ロボットシステムは有用で、しかも魅力ある方法で人間と相互関係をもつことが期待されている。一般に、ロボットは人間のように見えかつ人間がよく行う振る舞いをするときによりその魅力が見出され、手や指のような人間の特性や特徴を備える、人間のようなロボットシステムまたはロボットによって人間とロボットとの効果的な相互関係が提供されることが受け入れられている。
【0004】
エンターティメントや他の応用において、興味深くかつ重要な点はロボットハンドのデザインである。例えば、ロボットキャラクターのハンドは、たとえ、そのキャラクターが人間の手を有していなくても、典型的には、人間の手の形状、器用さ、動き及び機能を模倣することを試みてデザインされる。不幸にも、既存のロボットハンドのデザインがロボット人間ハンドを提供する際の全てのデザインに首尾良く適合するものではない。既に多くのエンドエフェクターのデザインが存在しているが、一般に、それらは、物体を掴むまたは挟むのに使用される単一の自由度を有する、単純な2本の指状の把持部または顎のバリエーションである。
【0005】
いくつかのロボットの“ハンド”が作製されているが、それらのデザインの中には2つの爪を有する把持部よりも人間の手に非常に類似しているが、典型的には器用さや形状といった点を欠いたものである。例えば、人間の指は4つの自由度(DOF)を有している(しかし、典型的には3つの自由度(DOF)だけが独立して制御される)。しかしながら、典型的にはロボットハンドは非常に少ないDOFしか有しておらず、いくつかのハンドは一つのハンドに対して一つの自由度を持つのみであり、器用さ及び運動能力が非常に限定されている。各指が独立して関節接合されるように一つの指に対して一つの自由度を備えたものが提供されるであろう。しかしながら、指の動きは、人間の手で見出されるよ
うな、各指の側方動作(左右動作)や指の部分またはディジットの独立した動きのない、自身を丸め込むような単純化された動きである。
【0006】
増加されたDOFを備える既存のロボットハンドは、非常に複雑であったり人間の形状に適合しなかったりする。例えば、ある既存のハンドデザインにおいては、指の形状に比較的良く適合したハンドに関して全部で24のDOFを備えているが、このハンドのデザインでは、ケーブル(または“腱”)及びアクチュエータの数がDOFの2倍、即ち48個必要となる。この結果、外見上人間の小さい手首及び前腕において大きな形状となってしまう。このハンドデザインにおける更なる問題は、指を駆動するのに使用されるケーブルや腱が固定された無潤滑金属や樹脂製のランナーをはみ出して深刻な摩擦や摩耗の問題を引き起こすことである。
【0007】
他のハンドは、各“フィンガー”に対して2つのディジットを有し、人間の形状因子(例えば、薄く延びた指、比較的小さな手首及び薄い手のひら)内で収めるには適さないプーリー及びアクチュエータメカニズムを使用する。特に、このハンドデザインにおいては、駆動ケーブルや腱に“n+1”の配列が使用され、それは必要なケーブルの数を減らすが、プーリーの配列はケーブルがその支持プーリーを360°以上に渡って巻き付けるようであり、それにはプーリーが厚くなることを要求し(例えば、概ねケーブルの厚さの2倍)、指の形状因子内で収めることは困難である。また、ケーブルは互いに交差し、ハンドを操作している間に互いに擦り合うので更なる摩擦や摩耗を引き起こす。更に、このハンドは、一本のフィンガーに対して4つのモータ駆動を必要とし、それはコスト、複雑さ、形状、及び、メンテナンスを増大させる。
【0008】
しかし、他のロボットハンドは、より厚いケーブルを使用し、かつプッシュ/プル配列を有するフィンガーを駆動するようにデザインされている。モータは、ハンドを支持するのに使用される手首の近くに配置される。手首を介して動力を伝達するために、フレキシブルな駆動シャフトが使用され、線形運動とは対照的な回転運動が手首を介して伝達される。この回転運動は、ハンドの手のひらに配置された送りネジによって線形運動に変換される。これにより、駆動シャフトの数はハンドの自由度の数に等しくなる(例えば、本デザインの一例として“12”)という利点が生じる。しかしながら、回転駆動ハンドの一つの欠点は、12個の送りネジをハンドの手のひらの内部に配置しなければならず、その結果、手のひらが大きく(即ち、人間のサイズよりも大きく)なってしまうことである。また、フィンガーのDOFを駆動させるためのプッシュ/プル配列における厚いケーブルの使用が“プッシュ”方向に付与される力の量を制限し、このロボットハンドのデザインの使用を制限してしまう。
【0009】
従って、人間の手の期待される機能を備えつつ、人間の形状因子に関連した課題を満たす、ロボットまたはロボットシステムのハンドデザインに関する要求がある。そのようなハンドデザインは人間の手とほぼ同数のディジットを有し、人間のような器用さと動きを備えたフィンガー(例えば、DOFとほぼ同数で動くフィンガー)を有することが好ましい。また、ロボットハンドのデザインは、比較的少ない構成要素を有し、かつ、ケーブル(または腱)の使用に関連する摩耗及び少ないメンテナンス問題に対処し得るものが好ましい。
【発明の概要】
【0010】
本発明は上記課題に関して、従来のハンド及び/またはフィンガーデザインに対して多
くの利点を有する、3つのディジットと人間のような形状及び動きとを備えるフィンガーを有するロボットハンドのデザインを提供する。ここに記載されたロボットハンドの実施形態は、人間の形状因子に適合する能力、所望のDOF(例えば、ロボットハンド内において配置または支持されるフィンガー当たり3つのDOF)、動作方法、ジョイントを正
確に制御する能力、物体を掴むために十分な力を与える能力、寿命(例えば、腱またはケーブルの摩擦や、さもなければ初期故障を引き起こしたり付加的なメンテナンスを強いたりする他の摩耗を低減する)を備える要素を提供している。
【0011】
以降において明かになるように、記載されたロボットハンドのいくつかの実施形態では3つのDOFフィンガーを駆動(例えば、4つのケーブル又はテンション要素を使用するn+1の駆動)するための最小の現実的な数のテンション要素(例えば、ケーブル、腱等)が使用される。これは、人間の手首の形状因子に制限された際に非常に制約された空間を提供する、2つの関節のあるフレキシブルな手首を介してケーブルまたは腱を引き回すときに重要な利点である。いくつかの実施形態におけるロボットハンドでは、フィンガーを駆動させるためのモータの最小数は減少したまたはそのままの数で使用される。モータは、複雑さ、コスト、パッケージング制約に関係し、それ故に、アクチュエータまたは駆動モータの数を低減することはより望ましいハンドのデザインとなる。さらに、ハンドの実施形態では、フィンガーのデザインが人間の形状因子に適合することを許容するプーリーのデザインが使用される。従来の多くのハンドのデザインは人間の形状因子の制約に適合することには強いられていなかったが、そのような制約は多くのアニマトロニックで且つ非エンターティンメントなロボットへの応用において要請されている。さらに、非潤滑要素上で摺動するケーブルに代えて、フィンガー自身におけるプーリー(例えば、ハンドの各フィンガーアセンブリのフィンガーディジットまたはセグメントに支持されたプーリー)の使用は、大きく摩擦を低減させかつ摩耗を減少させる(即ち、寿命を向上させる)。ハンドの実施形態では、フィンガー駆動のプレテンションまたはケーブル/腱の駆動を供給するための受動的な腱張力メンテナンスシステムが使用される。これは、関連するハードウェア、電子的な及びソフトウェアの複雑さ及びコスト高を伴う付加的なモータの使用を要する能動的アプローチと対照的である。しかも、ここで記載されたロボットハンドの実施形態では、アクチュエータ運動とフィンガージョイント運動との間における、典型的な固定された運動関係が使用される。
【0012】
より詳しくは、ロボットハンドは少なくとも一つのフィンガーアッセンブリを備えており、典型的にはより人間の手をシミュレートするために5つのフィンガーアッセンブリが含まれる。各フィンガーアッセンブリにおいて、ロボットハンドは、長尺状でかつフレキシブルなテンション要素(例えば、スチールケーブルまたはそれに類似のもの)に張力を与えるフィンガー駆動アッセンブリを備えている。各フィンガーアッセンブリは、駆動アッセンブリによるテンション要素の選択的な引っ張り/移動によって駆動または移動する一連のリンクまたはリンク部材を備えている。リンクは、3つのDOFを持つようにピボットジョイントで連結され、フィンガーアッセンブリは、リンク上に支持されフィンガーアッセンブリを介してテンション要素を支持及び案内するように配列されている一連のプーリーを含んでいる。テンション要素は、好ましくはプーリーの何れか一つに部分的に延びており、フィンガーアッセンブリは非螺旋状に巻回されているテンション要素で“n+1”駆動を利用する(ここで、“n”は、DOFであり、その値はテンション要素の数である)。
【0013】
いくつかのケースにおいて、前記プーリーは螺旋状の巻回を実行する装置に使用されるプーリーの高さの約半分のである。螺旋巻回システムでは、螺旋が形成されるように、いかなる溝もなく、または一つの幅広、平坦な溝を有さないプーリーが使用され、一方、他の応用では単一の螺旋状に切削された溝が使用される。どちらのケースにおいても、螺旋状のラッピングの使用は、プーリーの一面を横切るように延びるケーブルラップのための付加的な部屋を必要とする。これに対して、ここに記載されたいくつかの実施形態において、各ケーブルまたはテンション要素は、約1/4ラップ、つまり、90°接触している
状態で、各接触プーリーの周囲の1/2よりも少なく覆われている。一連のリンクは、(
例えば、人間の指に3つのディジットまたはセグメントをシミュレートするためには)第
1、第2及び第3のディジットまたはディジットリンクを含んでいる。そのようなケースでは、第3のディジットリンクは旋回中心可能に第2のディジットリンクに連結されており、第2のディジットリンクは、同様に、旋回中心可能に第1のディジットリンクに連結されている。第1及び第2のディジットリンクは、これら2つのリンクの各々で終端している一対のテンション要素またはケーブルがあれば、駆動アッセンブリによって独立して駆動または操作可能である。フィンガーアッセンブリには、第3のディジットリンクが第2のディジットリンクの動きによって駆動可能となるように第3のディジットリンクを第2のディジットリンクに連結するための付加的な連結器リンクが含まれている(例えば、第3のディジットリンクは第2のディジットリンクに対して従動またはスレーブリンクとして振る舞うように受動的に駆動されていてもよい)。
【0014】
また、ハンドは、手のひら要素またはプレート、ベースリンク部材、及び第1のディジット取付リンク部材を含んでいる。ベースリンク部材は、ハンド内にフィンガーアッセンブリを支持する手のひらプレートに固着されている。第1のディジット取付リンク部材は第1の軸を中心として旋回可能に(例えば、各回転方向において約40°または20°またはそれ未満の移動範囲で)ベースリンク部材に取り付けられており、第1のディジットは、第1の軸を横切るまたは直交するように延びる第2の軸を中心として旋回可能に(例えば、手のひらから離間する反時計周り方向については約15°未満の範囲内、及び、手のひらに向かう時計周り方向については約75°〜100°の範囲内で)第1のディジット取付リンク部材に連結されている。このように、フィンガーアッセンブリの第1のディジットの運動範囲は側方移動(側方移動)(例えば、第1の軸を通る垂直平面に関してプラスマイナス13°またはそれに近い値)、及び、小さな後方屈曲(例えば、第2の軸を通る水平面に関して15°未満)かつ大きな前方屈曲(例えば90°以上)を行う人間の指に類似している。第3のディジットリンクは第2のディジットリンクによってそれ及び第2のディジットリンクが人間の指に類似した後方屈曲によって直線状になるように駆動し、かつ、それ及び第2のディジットリンクが第1のディジットリンクの前方屈曲または丸くなることによって内側に向かって大きく丸まるように(例えば、握りこぶしを形成するまたは物体を握るように)駆動する。いくつかの実施形態においては、駆動アッセンブリは4つのテンション要素を所望のテンションに維持するための受動的な張力メンテナンスシステムを提供するように適応され、このまたは他の特徴は3つのアクチュエータ(例えば、駆動モータ)が少なくとも4つのアクチュエータよりも4つのテンション要素を作動または動作することを許容する。
【図面の簡単な説明】
【0015】
【図1】ロボットハンドまたはハンドアッセンブリ、手首、前腕、ロボットハンドの各フィンガーの駆動アッセンブリまたはメカニズムを示す図(即ち、本例では、5本のフィンガー及び5個の駆動アッセンブリを備えている)
【図2】ロボットフィンガーまたはフィンガーアッセンブリの要素を示す図1のシステムのロボットハンドの拡大または詳細な斜視図であって、図1は、ロボットフィンガーまたはフィンガーアッセンブリの要素及び図1に示す手首に取り付けらえた支持プレートに取り付けられていることを示している。
【図3】図1又は図2のハンドで使用される、本発明の一実施形態に係るロボットフィンガー又はフィンガーアッセンブリ。
【図4】図1〜図3のフィンガーを実行するのに使用される、本発明の一実施形態に係るロボットフィンガー又はフィンガーアッセンブリ。
【図5】図1〜図4に示すフィンガーのように、フィンガー内に含まれた一連のプーリーまたはプーリーアッセンブリの部分分解図であって、それらは、プーリーのセットまたはアッセンブリを備えるフィンガーアッセンブリの操作をしている間にフィンガーを駆動または作動するのに使用される4本の腱またはケーブルを案内及び/または支持するために使用される。
【図6】図1〜図4に示すフィンガーのように、フィンガー内に含まれた一連のプーリーまたはプーリーアッセンブリの部分分解図であって、それらは、プーリーのセットまたはアッセンブリを備えるフィンガーアッセンブリの操作をしている間にフィンガーを駆動または作動するのに使用される4本の腱またはケーブルを案内及び/または支持するために使用される。
【図7】図1〜図4に示すフィンガーのように、フィンガー内に含まれた一連のプーリーまたはプーリーアッセンブリの部分分解図であって、それらは、プーリーのセットまたはアッセンブリを備えるフィンガーアッセンブリの操作をしている間にフィンガーを駆動または作動するのに使用される4本の腱またはケーブルを案内及び/または支持するために使用される。
【図8】ベース、または、所定の角度(例えば、腱の入力角またはそれに類似したもの)でフィンガーに腱を挿入またはケーブルを駆動する取付リンク(l0)の配列を示す図3のロボットフィンガーアッセンブリの側面図。
【図9】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図10】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図11】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図12】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図13】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図14】フィンガーの運動範囲、ディジット及びより人間のようにフィンガーを駆動するためのディジットの独立した動きを示す、多くの位置または操作モードにおける、図3のフィンガーアッセンブリの図。
【図15】図1のシステムまたはそれに類似したロボットハンドシステム内に配置された/取り付けられた受動的な張力メンテナンスシステムの模式図。
【図16】図1のフィンガー駆動アッセンブリまたはメカニズムの一つの斜視図であって、一連の腱または駆動ケーブルに接続するフィンガーアッセンブリを独立して駆動するのに使用される。
【図17】図16のフィンガー駆動アッセンブリの図であって、本発明の実施形態に係るロボットハンドのフィンガーアッセンブリにおいて、一連の4本の腱または駆動ケーブルを供給するモータのセットによって駆動されるワイヤまたはケーブルを含む。
【図18】図1及び図2に示すハンドのように、本発明の実施形態に係るロボットハンドに使用される腱取付アッセンブリの部分的な模式図。
【図19】ロボットハンドの腱または駆動ケーブルを案内または支持するために使用されるフレキシブルな管の一実施形態を示す図。
【発明を実施するための形態】
【0016】
本発明の実施形態は、人間の手及び指に関して向上したシミュレーションとともに改良されたパフォーマンスを有するという、長年に渡って存在する要求に対処するロボットハンドシステムに関するものである。従前のロボットハンドは、人間の指(即ち、3つのセグメントまたはディジット)で見出されるようなジョイント及びディジット/セグメントよりも少ないジョイント及びディジット/セグメントを有するか、または、フィンガー、
手のひら、手首またはその他の部分が人間の形状因子に適合しないまたはふさわしくないような大きさ又は/及びデザインであった。ここで述べるロボットハンドシステムは、ハンド及び各フィンガーが人間の形状因子に適合しつつ多くのジェスチャーを作り出すことが可能となるように15の自由度(DOF)(即ち、1本の指につき3つのDOF)を有するハンドまたはハンドアッセンブリを提供する。各フィンガーまたはフィンガーアッセンブリにおいて、1本のフィンガーにつき4つのジョイントを駆動させるための、テンション要素(例えば、フレキシブルなスチールケーブルまたはワイヤ/ワイヤロープで形成された腱または駆動ケーブル)、結合、及びプーリーがあり、それらは人間のサイズ制限内に抑えつつ1本のフィンガーにつき3つのDOFを備えている。駆動は、4つのテンション要素が各フィンガーについて3つのDOFを駆動させるのに使用されるように、“n+1”のテンション要素または腱を使用する。この方法では、各フィンガーは、ユニークなプーリー及びテンション/駆動配列によって部分的に人間の指の形状を有し、各フィンガーは、人間のような器用さ、ジェスチャー、及び、ロボットハンドのフィンガーの3つのディジットまたはセグメントの動作範囲で駆動される。
【0017】
図1は、(モータ及びドライバが人間の形状因子である、腕、肩、または身体内に位置する状態ではない)プロトタイプの形態で示される本発明の一実施形態に係るロボットハンドシステム100である。図示するように、システム100は、ロボットハンドまたはロボットハンドアッセンブリ110と、手首130と、前腕140と、一連のフィンガー駆動アッセンブリまたはメカニズム160とを含んでいる。駆動アッセンブリ(またはモータドライブ)160は支持基材またはプレート150上に配置されるが、実際には、ロボットシステム100の前腕140上に配置されてもよいし、上腕(図示略)上に配置されてもよいし、胴体(図示略)中または胴体(図示略)上に配置されてもよい。図示しないが、多くの駆動ケーブルまたは腱(またはテンション要素と呼ばれる)は、(例えば、ハンド110のフィンガーを独立的に作動または駆動させるために)ハンドアッセンブリ110の部位に連結されるよう、駆動アッセンブリ160から前腕140及び手首130を介して延びている。
【0018】
システム100の要素は以下に詳述するが、ハンドアッセンブリ110は、図2に詳しく示されるように、5本のフィンガーまたはフィンガーアッセンブリ112,114,116,118,120を含んでいる。フィンガーアッセンブリ112,114,116,118,120はプレート124に強固に固着されており、プレート124は手首130及び前腕140とともに動くように手首130に取り付けられている。フィンガーアッセンブリ112,114,116,118,120はベースまたは次の第1リンク部材(例えば、後記の図面に表されるリンクlo)においてプレート124に固着されており、第
2リンク部材(例えば、後記の図面に表されるリンクl1)がベースまたは初期リンク部
材に取り付けられている。プレート124は、5本のフィンガーアッセンブリのうち1本のフィンガーアッセンブリ120(つまり、親指)が他のフィンガーアッセンブリ112,114,116,118とは相対的に異なる位置に配置されて人間の手のひらを再現する形状を成している。そして、フィンガーアッセンブリ112,114,116,118は半円周または他のパターン(例えば、ベースリンク部材が完全に平行に配列していない状態)に配列され、それにより、人間の手の配列に的確に適合し、かつフィンガーアッセンブリ112,114,116,118,120の所望の範囲の側方動作(左右動作)や他の動作が円滑になる。各駆動アッセンブリ160は、対応するフィンガー112,114,116,118,120を操作または駆動するように独立して設けられている(並行操作を含んでもよい)。よって、5本のフィンガーのシステム100において、5つの駆動アッセンブリ160が、ハンドアセンブリ110の5本のフィンガー112,114,116,118,120を駆動するために設けられている。
【0019】
次に、関連した駆動アッセンブリまたはモータ駆動メカニズム160を伴う5本のフィ
ンガーアッセンブリ112,114,116,118,120のうち一つのデザインについて説明する。そのような説明は、より人間に似たロボットハンドシステム100を提供するための、図1及び図2のシステム100に示されているいかなる駆動/フィンガー対に対しても適用される。さらに、システム100は、アッセンブリ160の駆動モータに電力を供給する一または一以上の電源を含んでおり、アッセンブリ160はフィンガー112,114,116,118,120ばかりでなく手首130や他のシステム100の部位を選択的に操作及び駆動するための一または一以上のコントローラによって操作される。そのような電源及びコントローラ装置は、発明を実施するために良く使用され、当業者において公知であって、本発明を限定するものではない。駆動モータの数(例えば、各フィンガーについて3個)、腱/駆動ケーブルのプレテンション、及び、他の特徴は本発明において重要であると思われ、それらについては以下に詳述する。
【0020】
図3は、本発明の一実施形態に係るロボットハンド(図1及び図2のシステム100のハンド110)に使用されるフィンガーアッセンブリ300を示す。一般に、フィンガーアッセンブリ300は一連の6個のリンク(図において“l0”〜“l6”で表示されている)と8本のシャフト(または図において“s0”〜“s8”で表示されているピボットピン/軸線であって、ピボット軸線はシャフトの長手軸線を通るまたは沿うように描かれている)とで構成されている。さらに、リンク又はリンク部材内に配置され、腱またはテンション要素(例えば、スチール駆動ケーブルまたはそれに類似した部材)を支持するために使用される9個のプーリー(図において“p1”〜“p9” で表示されている)
があり、それらは3つのDOFを有する3つのディジットの動きを含んだ使用時においてフィンガー300を駆動するために使用される。
【0021】
図3に示すように、フィンガーアッセンブリ300は取付孔312を介して取り付けられるベースまたは初期リンク部材(リンクはリンク部材と同じように用いられる)310を含み、取付孔312はハンドプレートに対してネジ孔、圧入レセプタクル等で形成されている。ベースリンク(即ち、リンクl0)は、4つのケーブル案内チャネルまたは通路314を含み、アッセンブリ300は図に示されるように、次のリンク部材330(リンクl1)及びチャネルまたは通路334にチャネルまたは通路314を通って延びる4本のケーブル321,322,323,324(図においてc1からc4で示されている)によって作動または駆動する。リンク部材330は該リンク部材330(及び図4において説明する4個のプーリー)の孔333内を通って延びるシャフトまたはピン332を介してベースリンク310に対して旋回可能に配置されている。リンク部材330(リンクl1)及びベースリンク310へのリンク部材330の旋回配置またはジョイントは、ある程度、シャフト332(または軸線1)の周りでの側方旋回(左右旋回)または動きを有する人間の指の関節の機能を再現する。
【0022】
さらにフィンガーアッセンブリ300は、人間の指の第1のディジットに類似した細長いリンク部材(リンクl2)340を含んでいる。リンク部材340は、リンク部材340及びリンク部材330の本体内の一対の孔337を貫通するシャフト336を介して第1の端部においてリンク部材330に対して旋回可能に配置されている。リンク部材330の本体はリンク部材340の前記第1の端部の両側部の周囲を延びるように配置されている。リンク部材340(リンクl2)は、テンション要素によって作動するとシャフト336(軸線2)の周りで旋回する。リンク部材340は、リンク部材340の本体上で支持シャフト348の周りで旋回する一連のプーリー344を支持している(例えば、一連のプーリー344は、図4の分解図に示されるように、フィンガー300を駆動するのに使用されるテンション要素を案内及び支持する、4つのプーリーを含んでいる)。
【0023】
リンク部材340の第2の端部において、フィンガーアッセンブリ300は人間の第2のディジットに類似した別のリンク部材(リンクl3)350を含んでいる。リンク部材
350は、軸線3の周りで旋回するようにピンまたはシャフト356を介してリンク部材340に対して旋回可能に配置されている。従って、ケーブルまたはテンション要素321〜324が作動されたとき、フィンガーアッセンブリ300では、ディジット/リンク部材340に対して相対的にディジット/リンク部材350がシャフト356(軸線3)を中心として独立した動きを生じる(例えば、人間の指のように、第2のディジットは、第1のディジットが動かない状態で動き得る、または第1のディジットが握りこぶしの状態に動くのに伴い動き得る)。一又は一以上のプーリー354はリンク部材350上に、または同リンク部材350の一部として設けることができ、図4はリンク部材350の本体の一部分として形成された単一のプーリー(即ち、p9)を示している。さらに、フィンガーアッセンブリ300は、人間の指の第3のディジットに相当するリンク部材370であって、ピン364を介して第2のディジットまたはリンク部材350に対して旋回可能に配置された別のリンク部材370を含んでいてもよい。軸線4またはシャフト364の周りでの旋回は、リンク部材360(リンクl5)を介したリンク部材350の動きに関係しており、リンク部材360は、両リンク部材340,370に対して旋回可能に取り付けられている。
【0024】
フィンガーアッセンブリ(例えば、組み立てられたフィンガー300)のフィンガーのデザイン及び操作を良く理解するために、分解したロボットハンドアッセンブリを使用してフィンガーの一つの有用な配列を示すことは有用である。図4は、本発明に係るハンドアッセンブリに使用される(及びフィンガー300のために使用されるが、他のプーリーの配列、リンク部材の構成及びデザインの変更がフィンガーアッセンブリ300の機能を提供するように使用されてもよい)単一のフィンガーまたはフィンガーアッセンブル400の分解図を示す。フィンガー400のベースリンク410(リンク部材l0)は(図1及び図2のプレート124のように)取付孔418を有する手のひらプレートに取り付けられている。隣のリンク420(リンク部材l1)は図示されるように2重のU字型金具の形状を有する。リンク420は、孔421及び軸線1のシャフト416(シャフトまたはピンs1)を介してベースリンク410に対して孔/通路417を中心に旋回可能に連結されており、また、リンク420は、孔422及び軸線2のシャフト423(シャフトまたはピンs2)を介してリンクまたは第1のディジット(リンク部材l2)430に対して旋回可能に連結されている。
【0025】
リンク460(リンク部材l3)は単一部材または図に示すように二分割部材として構成されたものであって、リンク460は人間の第2のディジットに相当する。リンク460は、リンク430,460の孔450,462をそれぞれ貫通する軸線3のシャフト(シャフトまたはピンs5)を介して第1のディジットリンク430に旋回可能に配置されている。さらにフィンガー400は、人間の指に類似したフィンガー400の第3のディジットを提供するリンク480(リンク部材l4)を含んでいる。リンク480は、第3のディジットリンク480の孔488及び第2のディジットリンク460の半分の孔472を貫通して延びる軸線4のシャフト(シャフトまたはピンs6)に対して旋回可能に配置されている。
【0026】
第2のディジットリンク460と第3のディジットリンク480との動きを結合するために使用されるリンク468(リンク部材l5)が付加されている。リンク468は、リンク430,480の孔454,484を貫通するシャフト458,482(シャフトまたはピンs7及びs8)を中心に旋回可能に配置されている。また、リンク468はその基端部において孔454を介して第1のディジットリンク430に対してピンまたはシャフト458によって旋回可能に取り付けられている(先端部においてはシャフト482を介して第3のディジットリンク480に取り付けられている)。この取付配列の結果、第3のディジットリンク480の動きは第2のディジットリンク460の移動または動きと連動する(例えば、リンク480はリンク460に対して内側に丸まりリンク460に対
して直線状になるが、第2のディジットリンクとは独立していない)。
【0027】
上述したように、本発明の実施形態に従い形成されたフィンガーは、一連のプーリーとテンション要素とが人間の指の形状因子内に収まるまたは位置するように、一連のプーリーとテンション要素とで駆動され。例えば、フィンガー400は典型的には(図16に示されるアッセンブリ160のような)駆動アッセンブリによって引っ張られ、そして、動く腱またはケーブルを使用して駆動される。ケーブルは図4に示されていないが、ベースリンクまたは取付ブロック410の孔419を貫通しており、リンクの終端または連結のためのフィンガー400の一部として示されるプーリーに渡って延びている(4本ケーブルの各々は、次の図を参照して後述する)。一実施形態において、スチールケーブル(例えば、SAVAインダストリ2024SN等)がテンション要素に使用される。スチールケーブルはフィンガー400内のプーリーを操作する。また、第1のディジットリンク430または第2のディジットリンク460のいずれかにおいて終端している。
【0028】
図4に示すように、プーリー411,412,413,414(プーリーp1〜p4)はそれぞれ軸線1のシャフト416(シャフトまたはピンs1)上の単一溝の遊動プーリーであって、軸線1のシャフト416(シャフトまたはピンs1)は孔または通路417を介してベースリンク410を通って延びている。プーリー436,434(プーリーp5,p7)は軸線2のシャフト423(シャフトまたはピンs2)に支持され回転し、軸線2のシャフト423は第1のディジットリンク430の第1の端部または基端部にある孔432を通って延びている。プーリー436は2重溝の遊動プーリーであり、一方、プーリー434は単一溝の遊動プーリーである。また、プーリー438(プーリーp6)は2重溝の遊動プーリーであって、プーリー436に最も近い第1のディジットリンク430の孔441を通って延びるシャフト440(シャフトまたはピンs3)に支持され回転する。プーリー442(プーリーp8)は2重溝の遊動プーリーであって、第1のディジットリンク430の第2の端部または先端部にある孔446を通って延びている。このデザインにおいて、プーリーp9は第2のディジットリンク460の本体の半分に加工されている(しかし、軸線3のシャフト452(シャフトs5)に支持され回転する場合においては、単独の遊動プーリーとしてデザインされるであろう)。保持または案内プレート444,470は、第1及び第2のディジットリンク430,460上のプーリー及び/またはケーブルを保持するために設けられている。
【0029】
ここで記載したロボットフィンガーの実施形態は、“n+1”配列で、一般に、4本の腱またはケーブル(例えば、スチールケーブル等から形成されているテンション要素)を介して操作される。つまり、テンションを維持する4つの腱は各フィンガーの3つの自由度(DOF)を作動させるのに使用される。図5〜図7は、本発明のロボットフィンガー内における、典型的な腱またはケーブルの経路及び/または終端または取り付けを説明するための、プーリーのセット及び第2のディジットリンクを示すロボットのフィンガーアッセンブリ500の部分図を示している。4本のケーブルまたは腱は“c1”〜“c4”
の符号で示され、それらはフィンガー300を作動させるのに使用される、図3に示されたケーブルである。図に示すように、フィンガーアッセンブリ500(例えば、フィンガー300,400でも良い)に関する一連のプーリーのセットは、9個のプーリー要素514,518,520,526,530,540,554を含んでおり、幾つかのプーリーは図に示すようなプーリーp1〜p9を提供すべく、単一軌道プーリー及び2重軌道プーリーである(例えば、プーリー要素またはプーリー514は要素518のように2つの個別のプーリーである一方、要素520,526,540は2重溝プーリーである)。
【0030】
図5は、ケーブルまたは腱510(またはケーブルc1)、フィンガー500のプーリーアッセンブリにおけるケーブルまたは腱510(またはケーブルc1)の軌道、及び、第2のディジットリンク550(リンクl3)の本体上の終端点558を示す。リンク5
50における終端点558から、ケーブルまたは腱510はプーリー554の周囲を通り、プーリー540における2つの軌道の一方に接してプーリー540の反対側を通ってSの字を形成している。ケーブルまたは腱510は、プーリー526に連続して(再び軌道の一つに接し)、2つの軌道の一つに対してプーリー520の反対側の周りを通って別のS字状を巻く。ケーブルまたは腱510は、プーリー514への接触を維持するようにフィンガーの内側に向かって僅かに傾斜させるプーリー要素514のプーリーp2部分に連続している。ケーブル510はプーリー520,526,540の内側溝または軌道を使用することに注意されたい。また、重要なこととして、図5に示されたケーブルの軌道は、いかなる螺旋(プーリーを全周すること)を形成する必要はなく、代りに、ケーブル510が(プーリーと腱510との間の接触角度が180°以下で、しばしば90°以下になるように)プーリーを部分的に覆っていることが必要である。これにより、フィンガー500の一連のプーリーの必要な数は増加するが、摩擦量は減少し、フィンガーが人間の指の形状因子に一致するようになる(例えば、縮小化が容易となる)。
【0031】
図6は、腱610(ケーブルc2)が一連のプーリーを通っているフィンガーアッセンブリ500を示す。腱610は、腱510(ケーブルc1)に対しプーリー554の反対側上の終端または取付位置616において第2のディジットリンク550にて終端していることが示されている。プーリー554の周りが部分的に覆われ、プーリー540の反対側にS字が形成される。腱610はプーリー526を回って連続し、プーリー520上を通って別のS字を形成する。腱610は、プーリーp3への接触を維持するために微小な傾斜を形成するプーリー518に連続している。図に示すように、腱610は、プーリー520,526,540の外側溝を使用し、腱610は、フィンガーアッセンブリ500のどのプーリーの周りにも完全には通っていないが(即ち、螺旋は形成されていない)、軌道や溝に接触する各プーリーの一部分に接触している。プーリーp1,p2,p3,p4は独立して回転できる別々のプーリーであることに注意されたい(2つのプーリーにおける4つの異なった溝ではない)。
【0032】
図7は、腱720,740(ケーブルc3,c4)が一連のプーリーを通るフィンガーアッセンブリ500を示す。腱720は、第1のディジットリンクl2内の符号“726”の位置において終端している(図7において、ケーブル軌道を図示し易くするために示されていないが、フィンガーアセンブリ400のリンク430またはアセンブリ300のリンク340である)。腱720はリンクl2からプーリー530の一部分に渡って延びている。腱720は、プーリー要素518のプーリーp4上に連続しており、腱720は、プーリー要素518への接触を維持するためにフィンガー500の内側に向かって微小に丸まっている。また、腱740(ケーブルc4)は符号“746”において第1のディジットリンクl2上で終端しているが、腱740は腱720に対しプーリー530の反対側上に連続している。腱740は、プーリーp1まで軌道化されており、腱740はプーリーp1への接触を維持するためにフィンガー500の内側に向かって微小に丸まっている若しくは曲がっている。さらに、ケーブルはフィンガー500のいかなるプーリーの周りで螺旋状に丸まってはいないし、ケーブルが互いに擦れ合っていなく、その結果、摩擦が低減され、フィンガー500の寿命が向上する。
【0033】
図8は、図3のフィンガーアッセンブリ300の正面図を示す(図3及び図4に示すプーリーの配列及びケーブルの配置がそれぞれデザインされている)。アッセンブリ300は、リンク部材330(リンクl1)のプーリー及び第1のディジットリンク340のプーリー(即ち、リンクl2上に支持されたプーリーp5及びp7)に接する、ベースリンク部材310の孔または通路314に延びるケーブル322,323を含むように示されている。図示されるように、ブロックまたはベースリンク310内のケーブル案内孔または通路314は、リンク本体310の正面または側面から外側に傾いており、ケーブル322,323は腱c1〜c4で形成されたプーリーp1,p2,p3,p4の周りの微小
な丸まりを収容するように受け入れられている(図8においてはケーブル322,323のみが見えている)。この傾きは各プーリーp1〜p4の部位とケーブルc1〜c4との間の所望の接触を維持するのを補助している。
【0034】
本発明に係るフィンガーの実施形態は、フィンガーアッセンブリ300にて適用されるように、人間の指にて見出される又は得られる運動範囲と類似した、各フィンガーのディジット/セグメントの運動範囲を備えるようにデザインされる。図9〜図14は、ジョイントの配列、及び、プーリーを含むテンション要素またはケーブルの駆動アッセンブリによる動作を通しての作動によって得られる様々な位置または操作モードにおけるフィンガーアッセンブリ300を示している。特に、図9及び図10は、人間の指の関節において見出されるようなフィンガーアッセンブリ300に関する側方範囲(左右範囲)の動きを示す。例えば、図9は第1の側方位置(最左位置)におけるフィンガー300を示し、図10は第2の側方位置(最右位置)におけるフィンガー300を示す。これらの図は、フィンガー300のピンまたはシャフト332の周りで側方へ最大に旋回または軸線1を中心に最大に回転したときのリンク330(リンクl1)を示す。
【0035】
図9は、最大回転角度θ、つまり、図に示すように例えば13°といった、20°よりも小さい最大回転角度θでの回転を示す(負又は正の回転であり、この図9での回転は、負の方向の回転、すなわち図9において反時計周り方向の回転である)。図10は、別のまたは反対方向における、最大回転角度αでの回転を示す(例えば、軸線1を通って上方向に延びている直交面に対する時計方向角度または正の回転角度)。互いに他の方向に対する回転が同じ大きさで対称な側方移動(左右移動)であってもよいし、異なった大きさであってもよい。一例として、回転角度αは、図に示すように、20°よりも小さい、または13°である。図9および図10では軸線1を中心とする、リンクl0に対するリンクl1の運動範囲はプラスマイナス約13°である。運動の最大時において、リンクl1とリンクl0とがそれらの平坦部において接触する(例えば、リンク330の本体の一部がピン又はシャフト332の周りでのリンク330の回転を制限または停止させるように作用するブロックまたはベースリンク310の隣接面と隣接または接触する)。
【0036】
図11及び図12は、第1及び第2垂直位置(例えば、リンク330におけるピン336を通る水平面に対する位置)におけるフィンガーアッセンブリ300を示し、図11は傾斜した後方位置におけるフィンガー300(手のひらプレートから離間する方に曲がった第1のディジットリンク340)を示し、図12は十分に前方に傾斜したフィンガー(手のひらプレートに向かって内側に曲がった第1のディジットリンク340)を示している。人間の手の指は、後方または手のひらから離間する方向に大きく伸びることはなく、その結果、フィンガー300は、図11に示すように、約20°(反時計方向またはピン336を中心とした負の回転方向)よりも小さいような比較的小さな回転角度β、一例として13°で最大後方屈曲に関連した第1の垂直位置を有する。また、この位置において、フィンガー300のディジットはリンク340,350,370でほぼ真っ直ぐまたは直線状であり、いくつかの場合において、縦軸がほぼ平面上に配列し、第2のディジットリンク350及び第3のディジットリンク370は人間の指に類似して第1のディジットリンク340よりも大きく後方にアーチ状になる。この垂直位置への移動は、リンク330またはリンク340上のストッパで制限され、または、いくつかの場合において、この方向の移動は、テンション要素またはケーブルの操作によって(或いは駆動モータの操作によって)制限される。
【0037】
反対に、人間の指は、握りこぶしを形成したり物体を握ったりするために手のひらに対して内側に向かって丸めることができる。このことを考慮して図12に示すように、フィンガーアッセンブリ300は第1のディジットリンク340(またはリンクl2)がピン
またはシャフト336(軸線2)の周りで比較的大きな回転角度τで回転することが許容
されており、例えば、第2の垂直位置へ時計周り方向で、少なくとも約75°、より典型的には少なくとも約90°(図では93°)で回転することが許容されている。これらを考慮した場合、図11及び図12は、軸線2の周りでのリンクl1に対するリンクl2の運動範囲を示し、この範囲は、負側に約13°(反時計周り方向)で、正側に約93°(時計周り方向)若しくはそれ以上の範囲である。
【0038】
上述したように、第2のディジットリンク350(リンクl3)は、第1のディジットリンク340(リンクl2)に対して独立して駆動する。図13は、ピン356または軸線3を中心として正の回転方向(時計方向)角度αで回転した第2のディジットリンク350が内側に閉じるまたは十分に丸まった状態のフィンガーアッセンブリ300を示し、角度αは約90°で、より典型的には少なくとも約100°である。換言すれば、第2のディジットリンク350は軸線3またはシャフト356を中心として約0〜100°の運動範囲を有する。
【0039】
いくつかの実施形態においては、第3のディジットリンク370(リンクl4)はスレーブ連結としての第2のディジットリンク340(リンクl3)に結合している。図13に示すように、第3のディジットリンク370(リンクl4)はリンク340(リンクl3)に対してまたはリンク340(リンクl3)とともに回転する。図14は、リンク360(リンクl5)を見やすくするために第2のディジットリンク350またはl3がラインで示されているフィンガーアッセンブリ300を示す。この第3のディジットリンク370の回転は受動的な結合回転であって、第1のディジットリンク340(リンクl2)に対する第2のディジットリンク350(リンクl3)の回転に応じたものである。図14から理解されるように、リンク360(リンクl5)はシャフトまたはピン1412(シャフトs8)で第3のディジットリンク370(リンクl4)に対して旋回し、かつ、シャフト1410(シャフトs7)で第1のディジットリンク340(リンクl2)に対して旋回する。シャフト1410(シャフトs7)とリンク340上の軸線3との間の距離は、シャフト1412(シャフトs8)とリンク370上の軸線4との間の距離の約1.3倍以下に設定されている。この種の結合はプーリーやケーブルを使用して成されていることに注意されたい。
【0040】
各フィンガージョイントの運動は各腱の運動に関係している。軸線1,2,3周りでの関連するリンク運動に対応する各ジョイント位置をそれぞれq1,q2,q3で示す。各ジョイントの速度を
【0041】
【数1】
で示し、その単位はラジアン/秒である。
各ケーブルの速度は
【0042】
【数2】
で示し、その単位はメートル/秒である。各プーリーの半径がメートルで与えられた場合、次の関係が成立する。
【0043】
【数3】
ここで、腱の運動は独立していないことに注意されたい。即ち、4つの腱が引っ張られた状態のままであるならば、3つのジョイント速度は4つの腱の速度で定義される。特段の定めが記載されていない限り、4つの腱速度のうち3つが指定されれば、4番目の腱速度が上記の式によって定義される。速度が前記式によって定義された関係から過度にずれていたら、腱が延びてしまっているか、若しくは張力を失っているかであろう。
【0044】
上記で注意したように、腱やケーブルの運動は独立していない。フィンガー腱を操作する方法の一つは、各腱を独立したリニアアクチュエータに連結することである。この場合、4つのアクチュエータの運動は、上記式を維持しかつ同時にケーブルの張力を維持するために調整される必要がある。別の方法は、たった3つのアクチュエータまたはモータがここで記載されたロボットハンドの各フィンガーを駆動するのに必要となるようこの関係を実行するメカニズムを使用することである。そのようなメカニズム1500は、受動的なテンションメンテナンスメカニズムとして考えられ、図15に模式的に示す。ここで、腱c1,c2はプーリーp10によって支持されるループを形成する。腱c3,c4はプーリーp11によって支持されるループを形成する。その所望の関係は、図15に示すようにプーリーp10,p11の軸線がy軸に対して並行に延びるように強いるメカニズム(図示しない)を介して実行される。この軸線に沿った各プーリーの速度v1,v2は等しく且つ反対である(即ち、v1=−v2)。
【0045】
この場合、腱マッピング式に対する前記ジョイントの運動学的な関係が成立し、4つの腱のうち3つの腱が、フィンガーを駆動するための、制御されたアクチュエータまたは駆動モータを介して駆動される必要がある。プーリーp10,p11の初期位置は、ケーブルに初期張力があり、その後その張力が受動的に維持されるように設定される。腱c1,c3,c4はアクチュエータm1,m2,m3を使用して駆動される場合、正の運動の方向も同様に、次の関係が存在する(位置はメートルの単位を有し、文字/記号の上にドット無しで示し、速度
【0046】
【数4】
は文字/記号の上にドット有りで示しメートル/秒の単位を有している)。
【0047】
【数5】
図16は、フィンガー駆動アッセンブリまたはメカニズム160を示し、このメカニズム160は、3つのアクチュエータ(または、例えば、駆動モータ)が4つのテンション要素または腱/ケーブルを操作または駆動するのに使用されることを許容する、上述した受動的な張力メンテナンスメカニズムを実行するように適合されている。システムまたはアッセンブリ160は、モータハウジング1619内に設けられたブラシレス直流モータ等を有する3つのアクチュエータ1617を含んでおり、アクチュエータ1617はベースプレート1620上に列状に固着されている。各モータ1617は、いくつかの適用において、連結されたフィンガーアッセンブリの正確な制御のために回転位置を記録し決定するエンコーダ1618を備えている。各モータ1617の出力シャフトはフレキシブルなカップリング1611を介して送りネジ1605に連結されており、カップリング1611は駆動シャフトと送りネジ1605との間のズレを調整するように適合されている。送りネジ1605は前部軸受け1603と後部軸受け1610とによって支持されており、送りネジ1605に加わるスラスト荷重を受けている。
【0048】
送りネジ1605はナット1607を駆動し、ナット1607はブロック1606に配置されている。このブロック1606は、溝付きプレート1604に係合する“タング(凸部)”によって回転を阻止される。一実施形態において、溝付きプレート1604はアセタールで形成されており、低摩擦滑り面を備える。各ブロック1606には、線形運動が伝達されるケーブル腱を固定するのに使用されるクランププレート1608が設けられている。受動的な張力メンテナンスメカニズムはシャフト1615,1616を介して旋回アーム1621に配置された2つのプーリー1613,1614を備えている。旋回アーム1621はリンク1622上を旋回し、リンク1622はモータマウント1619のスロット内をスライドするように制約されている。リンク1622の運動はモータマウントブロック1619の孔に挿通されたテンションネジ1623によって制約されている。アーム1621の旋回運動は、フィンガーの運動範囲である式v1=−v2の制約に非常に近い。
【0049】
図17は、受動的な張力メンテナンスメカニズムを通じて軌道化された腱またはケーブル1710,1720,1730,1740(ケーブルc1〜c4)を有するフィンガー駆動メカニズム160を示す。ケーブル1710,1720,1730,1740は、ベアリング支持ブロック1601に形成された孔を通ってプーリー1613,1614まで延びている。張力ネジ1623を締め付けることによって、フィンガー腱1710,1720,1730,1740が引っ張られる。ベアリング支持ブロック1601上の付加的な調整器1602は、送りネジナット1607に対してフィンガージョイントの位置を微調整するために使用される。
【0050】
前述したように、フィンガーアッセンブリとフィンガー駆動アッセンブリとの間の腱またはケーブルの長さは一定であると仮定した。しかしながら、駆動アッセンブリ及びフィンガーアッセンブリは手首のジョイントの反対側に配置されており、ケーブルの長さは一定ではない。このような実施をサポートするために、フレキシブルな腱の管が、一定の長
さという制約を維持するのに使用される。例えば、図18は、フレキシブル管1830を有するケーブルまたは腱連結アッセンブリ1800を示し、フレキシブル管1830はその一端が駆動アッセンブリにおいてベアリング支持ブロック1810に取り付けられ、他端がベースリンク1820(フィンガーアッセンブリのリンクl0)に取り付けられてい
る。ケーブル腱1840はこの管1830を通して延びている。管1830は腱1840における張力の大きさと等しい圧縮負荷を支持する。図19は、フレキシブル管1900の一実施例を示しており、図に示すように、本実施形態では滑らかな内側面及び外側面を有するという利点を備える、ステンレスワイヤまたはコイル(例えば四角状ステンレスワイヤまたはコイル)1910で形成される管1900が利用されている。管1910は、グラスファイバー含浸テフロン(登録商標)ライナーチューブ等1920で内面を覆われており、スチール腱(例えば、腱1840)と管1910(または管1830)との摩擦を低減する。さらに、これらの要素間の面はテフロン(登録商標)または他の潤滑剤を使用することによって滑らかになっている。
【0051】
本発明はある程度の具体性を有して記述及び例示したが、ここでの開示は一例に過ぎず、部品の組み合わせ及び配列を多く変化させることによって本発明の精神および範囲から外れることなく当業者によって使用され得る。
【特許請求の範囲】
【請求項1】
少なくとも一つのフィンガーアッセンブリと、
ロボットハンド内に含まれるフィンガーアッセンブリの各々について、4つの長尺状でかつフレキシブルなテンション要素に選択的に張力を与える駆動アッセンブリと
を備え、
前記フィンガーアッセンブリの各々は、前記テンション要素によって駆動される一連のリンクを備え、
前記リンクは、3つの自由度を備える動きを有するように互いに旋回可能に連結され、
前記各フィンガーアッセンブリはさらに、該フィンガーアッセンブリのテンション要素を支持しかつ案内するために前記リンク上に支持された一連のプーリーを備え、前記テンション要素は前記プーリーのうちいずれか一つのプーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行することを特徴とする、ロボットハンド。
【請求項2】
請求項1に記載のロボットハンドにおいて、
前記複数のプーリーのうちの少なくとも一部は、螺旋状の巻回を有さない単一溝のプーリーであり、
前記テンション要素は、それぞれケーブルを含むことを特徴とする、ロボットハンド。
【請求項3】
請求項2に記載のロボットハンドにおいて、
前記ケーブルの各々は、前記プーリーに対してその周囲の半分以下で巻回されていることを特徴とする、ロボットハンド。
【請求項4】
請求項1に記載のロボットハンドにおいて、
前記一連のリンクは、第1のディジットリンク、第2のディジットリンク、及び、第3のディジットリンクを備え、前記第3のディジットリンクは前記第2のディジットリンクに旋回可能に取り付けられ、前記第2のディジットリンクは前記第1のディジットリンクに旋回可能に取り付けられ、前記第1及び第2のディジットリンクは前記テンション要素に張力を与える前記駆動アッセンブリによって独立して操作可能であることを特徴とする、ロボットハンド。
【請求項5】
請求項4に記載のロボットハンドにおいて、
前記フィンガーアッセンブリはさらに、前記第3のディジットリンクが受動的な従動リンクとして、前記第2のディジットリンクの動きによって駆動されるように、前記第3のディジットリンクを前記第2のディジットリンクに連結する付加的なリンクを備えていることを特徴とする、ロボットハンド。
【請求項6】
請求項4に記載のロボットハンドにおいて、
前記フィンガーアッセンブリはさらに、手のひらプレート、ベースリンク部材、及び、第1のディジット取付リンク部材を備え、前記ベースリンク部材は前記フィンガーアッセンブリを支持するために前記手のひらプレートに固着され、前記第1のディジット取付リンク部材は、第1の軸線を中心として旋回するように前記ベースリンク部材に取り付けられ、前記第1のディジットリンクは前記第1の軸線と交差するように延びる第2の軸線を中心として旋回するように前記第1のディジット取付リンク部材に連結されることを特徴とする、ロボットハンド。
【請求項7】
請求項6に記載のロボットハンドにおいて、
前記ベースリンク部材に対する第1のディジット取付リンク部材の運動範囲は、前記第1のディジットリンクの側方移動を規定するために40°以下であり、前記第1のディジ
ット取付リンク部材に対する第1のディジットリンクの運動範囲は、第2の軸線を中心とした回転角度であって、前記第2の軸線を通る面に対して反時計周り方向には15°以下の回転角度であり、前記第2の軸線を通る前記面に対して時計周り方向には75°〜100°の範囲の回転角度であることを特徴とする、ロボットハンド。
【請求項8】
請求項4に記載のロボットハンドにおいて、前記テンション要素のうちの第1及び第2のテンション要素は第2のディジットリンク上で終端しており、前記テンション要素のうちの第3及び第4のテンション要素は第1のディジットリンク上で終端していることを特徴とする、ロボットハンド。
【請求項9】
請求項1に記載のロボットハンドにおいて、前記駆動アッセンブリは、4つのテンション要素を駆動する3つのアクチュエータで構成されていることを特徴とする、ロボットハンド。
【請求項10】
請求項1に記載のロボットハンドはさらに、前記フィンガーアッセンブリと前記駆動アッセンブリとの間に位置する、関節を有する手首を備えていることを特徴とする、ロボットハンド。
【請求項11】
請求項10に記載のロボットハンドはさらに、前記手首を通過するように延びる複数のケーブル管を備え、前記テンション要素の各々は前記ケーブル管の一つを通過するように延びていることを特徴とする、ロボットハンド。
【請求項12】
請求項11に記載のロボットハンドにおいて、前記ケーブル管の各々は、ライナチューブで内面を覆われた四角状ワイヤで形成された外壁を備えており、テンション要素の各々は、前記ライナチューブの対応する一つに挿通されたケーブルを含むことを特徴とする、ロボットハンド。
【請求項13】
4つの駆動ケーブルによって駆動されるように適合されたロボットハンドのフィンガーアッセンブリにおいて、
前記駆動ケーブルを受け入れ、かつ前記ロボットハンドのベースに取り付けられるベースリンクと、
前記ベースリンクに第1の軸線を中心として旋回可能に取り付けられる取付リンクと、
第1の端部において前記取付リンクに対して取り付けられ、前記第1の軸線と交差する第2の軸線を中心として旋回可能な長尺状の第1のディジットリンクと、
第2の端部において前記第1のディジットリンクの第2の端部に対して、第3の軸線を中心として旋回可能に取り付けられた第2のディジットリンクと、
前記第2のディジットリンクの第2の端部に対して、第4の軸線を中心として旋回可能に取り付けられた第3のディジットリンクと
を備えることを特徴とする、フィンガーアッセンブリ。
【請求項14】
請求項13に記載のフィンガーアッセンブリにおいて、
一対の前記駆動ケーブルが前記第2のディジットリンクに取り付けられ、一対の前記駆動ケーブルが前記第1のディジットリンクに取り付けられ、前記第3のディジットリンクは、前記第3の軸線を中心とした前記第2のディジットリンクの運動によって第4の軸線を中心として回転駆動されるよう、前記第2のディジットリンクに連結されることを特徴とする、フィンガーアッセンブリ。
【請求項15】
請求項13に記載のフィンガーアッセンブリにおいて、前記第1の軸線は実質的に第2の軸線に対して直交し、第2、第3及び第4の軸線は互いに実質的に平行であることを特徴とする、フィンガーアッセンブリ。
【請求項16】
請求項13に記載のフィンガーアッセンブリにおいて、前記取付リンクは前記第1の軸線を中心として約40°以下の運動範囲を有することを特徴とする、フィンガーアッセンブリ。
【請求項17】
請求項16に記載のフィンガーアッセンブリにおいて、前記第1のディジットリンクは前記第2の軸線を中心に第1の方向に20°以下、かつ、第2の方向に75°以上の運動範囲を有し、前記第2のディジットリンクは前記第2の方向に90°以上の運動範囲を有することを特徴とする、フィンガーアッセンブリ。
【請求項18】
請求項13に記載のフィンガーアッセンブリはさらに、一または一以上のリンク上に複数のプーリーを備え、前記駆動ケーブルの各々は、フィンガーアッセンブリを通って、プーリーの周囲の半分以下に渡って延びる溝内で一または一以上のプーリーに接するように延びていることを特徴とする、フィンガーアッセンブリ。
【請求項19】
手のひら要素と前記手のひら要素に固定された複数のフィンガーとを備え、前記フィンガーが、3つの自由度(DOF)の動きを有するフィンガーを提供するように適合された一連のリンクとジョイントとを備えるロボットハンドアッセンブリと、
3つの自由度(DOF)の動きを実行するために各フィンガーを駆動させるための一連の4つの駆動ケーブルと、
張力を受けている各駆動ケーブルをメンテナンスする受動的な張力メンテナンスシステムを有するとともに、フィンガーを駆動させるために駆動ケーブルに付加的な張力を選択的に加える3つのアクチュエータとを有する、各フィンガーに対応するフィンガー駆動メカニズムと、
を備えることを特徴とする、ロボットハンドシステム。
【請求項20】
請求項19に記載のロボットハンドシステムにおいて、前記受動的な張力メンテナンスシステムは第1及び第2のプーリーを備え、前記駆動ケーブルの第1の対は互いに連結されるとともに前記第1のプーリーに巻回され、前記駆動ケーブルの第2の対は互いに連結されるとともに前記第2のプーリーに巻回され、前記第1及び第2のプーリーは各ケーブルに張力を加えるために前記フィンガー駆動メカニズム内に配置されていることを特徴とする、ロボットハンドシステム。
【請求項21】
請求項19に記載のロボットハンドシステムにおいて、3つの前記アクチュエータは、4本の駆動ケーブルのうち3本の駆動ケーブルに張力を選択的に加えるための3つの駆動モータを含むことを特徴とする、ロボットハンドシステム。
【請求項22】
請求項19に記載のロボットハンドシステムにおいて、前記フィンガーの各々は、第1、第2、及び、第3のリンク部材を備え、前記第1のリンク部材は手のひら要素に、直交する第1及び第2の軸線を中心として回転するように取り付けられ、
前記第2のリンク部材は、前記第1のリンク部材の、前記手のひら要素から遠位側の端部において旋回可能に取り付けられ、
前記第3のリンク部材は前記第2のリンク部材の、前記第1のリンク部材から遠位側の端部において旋回可能に取り付けられていることを特徴とする、ロボットハンドシステム。
【請求項23】
請求項22に記載のロボットハンドシステムにおいて、前記アクチュエータが第1のリンク部材を前記第1及び第2の軸線を中心として独立して動かすことを許容するとともに前記第1のリンク部材に対して前記第2のリンク部材を独立して動かすことを許容するように、一対の前記駆動ケーブルが前記第2のディジットリンク部材に取り付けられるとと
もに一対の前記駆動ケーブルが前記第1のディジットリンク部材に取り付けられていることを特徴とする、ロボットハンドシステム。
【請求項24】
ロボットハンドのフィンガーを駆動させるための駆動メカニズムにおいて、
一連の4本の腱ケーブルと、
4本の腱ケーブルのうちの2本の第1の腱ケーブルの運動時の平均速度は、4本の腱ケーブルのうち他の2本の第2の腱ケーブルの運動時の平均速度に対して、その大きさが等しく方向が反対となる、4つの腱ケーブルに関する運動学的な関係を実行する受動的な腱張力メンテナンスメカニズムと
を備えることを特徴とする、駆動メカニズム。
【請求項25】
請求項24に記載の駆動メカニズムにおいて、
前記4本の腱ケーブルの運動は、送りネジを駆動する一連のモータによって行われることを特徴とする、駆動メカニズム。
【請求項26】
請求項24に記載の駆動メカニズムはさらに、4本の腱ケーブルを支持する2つのプーリーを備え、前記2つのプーリーは前記フィンガーの旋回アームに取り付けられ、前記4本の腱ケーブルはフィンガーの端部に取り付けられていることを特徴とする、駆動メカニズム。
【請求項1】
少なくとも一つのフィンガーアッセンブリと、
ロボットハンド内に含まれるフィンガーアッセンブリの各々について、4つの長尺状でかつフレキシブルなテンション要素に選択的に張力を与える駆動アッセンブリと
を備え、
前記フィンガーアッセンブリの各々は、前記テンション要素によって駆動される一連のリンクを備え、
前記リンクは、3つの自由度を備える動きを有するように互いに旋回可能に連結され、
前記各フィンガーアッセンブリはさらに、該フィンガーアッセンブリのテンション要素を支持しかつ案内するために前記リンク上に支持された一連のプーリーを備え、前記テンション要素は前記プーリーのうちいずれか一つのプーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行することを特徴とする、ロボットハンド。
【請求項2】
請求項1に記載のロボットハンドにおいて、
前記複数のプーリーのうちの少なくとも一部は、螺旋状の巻回を有さない単一溝のプーリーであり、
前記テンション要素は、それぞれケーブルを含むことを特徴とする、ロボットハンド。
【請求項3】
請求項2に記載のロボットハンドにおいて、
前記ケーブルの各々は、前記プーリーに対してその周囲の半分以下で巻回されていることを特徴とする、ロボットハンド。
【請求項4】
請求項1に記載のロボットハンドにおいて、
前記一連のリンクは、第1のディジットリンク、第2のディジットリンク、及び、第3のディジットリンクを備え、前記第3のディジットリンクは前記第2のディジットリンクに旋回可能に取り付けられ、前記第2のディジットリンクは前記第1のディジットリンクに旋回可能に取り付けられ、前記第1及び第2のディジットリンクは前記テンション要素に張力を与える前記駆動アッセンブリによって独立して操作可能であることを特徴とする、ロボットハンド。
【請求項5】
請求項4に記載のロボットハンドにおいて、
前記フィンガーアッセンブリはさらに、前記第3のディジットリンクが受動的な従動リンクとして、前記第2のディジットリンクの動きによって駆動されるように、前記第3のディジットリンクを前記第2のディジットリンクに連結する付加的なリンクを備えていることを特徴とする、ロボットハンド。
【請求項6】
請求項4に記載のロボットハンドにおいて、
前記フィンガーアッセンブリはさらに、手のひらプレート、ベースリンク部材、及び、第1のディジット取付リンク部材を備え、前記ベースリンク部材は前記フィンガーアッセンブリを支持するために前記手のひらプレートに固着され、前記第1のディジット取付リンク部材は、第1の軸線を中心として旋回するように前記ベースリンク部材に取り付けられ、前記第1のディジットリンクは前記第1の軸線と交差するように延びる第2の軸線を中心として旋回するように前記第1のディジット取付リンク部材に連結されることを特徴とする、ロボットハンド。
【請求項7】
請求項6に記載のロボットハンドにおいて、
前記ベースリンク部材に対する第1のディジット取付リンク部材の運動範囲は、前記第1のディジットリンクの側方移動を規定するために40°以下であり、前記第1のディジ
ット取付リンク部材に対する第1のディジットリンクの運動範囲は、第2の軸線を中心とした回転角度であって、前記第2の軸線を通る面に対して反時計周り方向には15°以下の回転角度であり、前記第2の軸線を通る前記面に対して時計周り方向には75°〜100°の範囲の回転角度であることを特徴とする、ロボットハンド。
【請求項8】
請求項4に記載のロボットハンドにおいて、前記テンション要素のうちの第1及び第2のテンション要素は第2のディジットリンク上で終端しており、前記テンション要素のうちの第3及び第4のテンション要素は第1のディジットリンク上で終端していることを特徴とする、ロボットハンド。
【請求項9】
請求項1に記載のロボットハンドにおいて、前記駆動アッセンブリは、4つのテンション要素を駆動する3つのアクチュエータで構成されていることを特徴とする、ロボットハンド。
【請求項10】
請求項1に記載のロボットハンドはさらに、前記フィンガーアッセンブリと前記駆動アッセンブリとの間に位置する、関節を有する手首を備えていることを特徴とする、ロボットハンド。
【請求項11】
請求項10に記載のロボットハンドはさらに、前記手首を通過するように延びる複数のケーブル管を備え、前記テンション要素の各々は前記ケーブル管の一つを通過するように延びていることを特徴とする、ロボットハンド。
【請求項12】
請求項11に記載のロボットハンドにおいて、前記ケーブル管の各々は、ライナチューブで内面を覆われた四角状ワイヤで形成された外壁を備えており、テンション要素の各々は、前記ライナチューブの対応する一つに挿通されたケーブルを含むことを特徴とする、ロボットハンド。
【請求項13】
4つの駆動ケーブルによって駆動されるように適合されたロボットハンドのフィンガーアッセンブリにおいて、
前記駆動ケーブルを受け入れ、かつ前記ロボットハンドのベースに取り付けられるベースリンクと、
前記ベースリンクに第1の軸線を中心として旋回可能に取り付けられる取付リンクと、
第1の端部において前記取付リンクに対して取り付けられ、前記第1の軸線と交差する第2の軸線を中心として旋回可能な長尺状の第1のディジットリンクと、
第2の端部において前記第1のディジットリンクの第2の端部に対して、第3の軸線を中心として旋回可能に取り付けられた第2のディジットリンクと、
前記第2のディジットリンクの第2の端部に対して、第4の軸線を中心として旋回可能に取り付けられた第3のディジットリンクと
を備えることを特徴とする、フィンガーアッセンブリ。
【請求項14】
請求項13に記載のフィンガーアッセンブリにおいて、
一対の前記駆動ケーブルが前記第2のディジットリンクに取り付けられ、一対の前記駆動ケーブルが前記第1のディジットリンクに取り付けられ、前記第3のディジットリンクは、前記第3の軸線を中心とした前記第2のディジットリンクの運動によって第4の軸線を中心として回転駆動されるよう、前記第2のディジットリンクに連結されることを特徴とする、フィンガーアッセンブリ。
【請求項15】
請求項13に記載のフィンガーアッセンブリにおいて、前記第1の軸線は実質的に第2の軸線に対して直交し、第2、第3及び第4の軸線は互いに実質的に平行であることを特徴とする、フィンガーアッセンブリ。
【請求項16】
請求項13に記載のフィンガーアッセンブリにおいて、前記取付リンクは前記第1の軸線を中心として約40°以下の運動範囲を有することを特徴とする、フィンガーアッセンブリ。
【請求項17】
請求項16に記載のフィンガーアッセンブリにおいて、前記第1のディジットリンクは前記第2の軸線を中心に第1の方向に20°以下、かつ、第2の方向に75°以上の運動範囲を有し、前記第2のディジットリンクは前記第2の方向に90°以上の運動範囲を有することを特徴とする、フィンガーアッセンブリ。
【請求項18】
請求項13に記載のフィンガーアッセンブリはさらに、一または一以上のリンク上に複数のプーリーを備え、前記駆動ケーブルの各々は、フィンガーアッセンブリを通って、プーリーの周囲の半分以下に渡って延びる溝内で一または一以上のプーリーに接するように延びていることを特徴とする、フィンガーアッセンブリ。
【請求項19】
手のひら要素と前記手のひら要素に固定された複数のフィンガーとを備え、前記フィンガーが、3つの自由度(DOF)の動きを有するフィンガーを提供するように適合された一連のリンクとジョイントとを備えるロボットハンドアッセンブリと、
3つの自由度(DOF)の動きを実行するために各フィンガーを駆動させるための一連の4つの駆動ケーブルと、
張力を受けている各駆動ケーブルをメンテナンスする受動的な張力メンテナンスシステムを有するとともに、フィンガーを駆動させるために駆動ケーブルに付加的な張力を選択的に加える3つのアクチュエータとを有する、各フィンガーに対応するフィンガー駆動メカニズムと、
を備えることを特徴とする、ロボットハンドシステム。
【請求項20】
請求項19に記載のロボットハンドシステムにおいて、前記受動的な張力メンテナンスシステムは第1及び第2のプーリーを備え、前記駆動ケーブルの第1の対は互いに連結されるとともに前記第1のプーリーに巻回され、前記駆動ケーブルの第2の対は互いに連結されるとともに前記第2のプーリーに巻回され、前記第1及び第2のプーリーは各ケーブルに張力を加えるために前記フィンガー駆動メカニズム内に配置されていることを特徴とする、ロボットハンドシステム。
【請求項21】
請求項19に記載のロボットハンドシステムにおいて、3つの前記アクチュエータは、4本の駆動ケーブルのうち3本の駆動ケーブルに張力を選択的に加えるための3つの駆動モータを含むことを特徴とする、ロボットハンドシステム。
【請求項22】
請求項19に記載のロボットハンドシステムにおいて、前記フィンガーの各々は、第1、第2、及び、第3のリンク部材を備え、前記第1のリンク部材は手のひら要素に、直交する第1及び第2の軸線を中心として回転するように取り付けられ、
前記第2のリンク部材は、前記第1のリンク部材の、前記手のひら要素から遠位側の端部において旋回可能に取り付けられ、
前記第3のリンク部材は前記第2のリンク部材の、前記第1のリンク部材から遠位側の端部において旋回可能に取り付けられていることを特徴とする、ロボットハンドシステム。
【請求項23】
請求項22に記載のロボットハンドシステムにおいて、前記アクチュエータが第1のリンク部材を前記第1及び第2の軸線を中心として独立して動かすことを許容するとともに前記第1のリンク部材に対して前記第2のリンク部材を独立して動かすことを許容するように、一対の前記駆動ケーブルが前記第2のディジットリンク部材に取り付けられるとと
もに一対の前記駆動ケーブルが前記第1のディジットリンク部材に取り付けられていることを特徴とする、ロボットハンドシステム。
【請求項24】
ロボットハンドのフィンガーを駆動させるための駆動メカニズムにおいて、
一連の4本の腱ケーブルと、
4本の腱ケーブルのうちの2本の第1の腱ケーブルの運動時の平均速度は、4本の腱ケーブルのうち他の2本の第2の腱ケーブルの運動時の平均速度に対して、その大きさが等しく方向が反対となる、4つの腱ケーブルに関する運動学的な関係を実行する受動的な腱張力メンテナンスメカニズムと
を備えることを特徴とする、駆動メカニズム。
【請求項25】
請求項24に記載の駆動メカニズムにおいて、
前記4本の腱ケーブルの運動は、送りネジを駆動する一連のモータによって行われることを特徴とする、駆動メカニズム。
【請求項26】
請求項24に記載の駆動メカニズムはさらに、4本の腱ケーブルを支持する2つのプーリーを備え、前記2つのプーリーは前記フィンガーの旋回アームに取り付けられ、前記4本の腱ケーブルはフィンガーの端部に取り付けられていることを特徴とする、駆動メカニズム。
【図1】

【図2】

【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2010−240834(P2010−240834A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2010−84527(P2010−84527)
【出願日】平成22年3月31日(2010.3.31)
【出願人】(504399716)ディズニー エンタープライゼス インコーポレイテッド (73)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成22年3月31日(2010.3.31)
【出願人】(504399716)ディズニー エンタープライゼス インコーポレイテッド (73)
【Fターム(参考)】
[ Back to top ]