
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができ、耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供する。
【解決手段】耕深表示装置40は、回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設された第1整地板11とこの後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備えて走行機体90に装着される代かき作業機1に搭載される。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され耕耘ロータの耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動するリンク機構部41と、この回動に応じて耕深を表示する耕深表示部50とを有する。耕深表示部50は、走行機体90に搭乗した作業者Mが代かき作業1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に設けられる。
【解決手段】耕深表示装置40は、回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設された第1整地板11とこの後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備えて走行機体90に装着される代かき作業機1に搭載される。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され耕耘ロータの耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動するリンク機構部41と、この回動に応じて耕深を表示する耕深表示部50とを有する。耕深表示部50は、走行機体90に搭乗した作業者Mが代かき作業1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に設けられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、耕耘ロータにより耕耘された耕土を整地する第1整地板と、この後部に上下方向に回動自在に設けられて耕土表面を均平にする第2整地板とを備える代かき作業機の耕深表示装置に関する。
【背景技術】
【0002】
このような第1整地板の後部に第2整地板を備える代かき作業機は、一般的に走行可能な走行機体の後部に三点リンク連結機構を介して昇降可能に連結されて、走行機体の前進走行とともに進行しながら代かき作業を行う。代かき作業機の昇降操作は、走行機体に搭乗した作業者が走行機体に設けられた操作スイッチ(レバー)によって行われる。
【0003】
この代かき作業機によって代かき作業を行う場合、圃場の耕盤に凹凸があると、走行機体が上下方向に移動するに伴って代かき作業機も上下方向に移動して、耕耘ロータによって耕耘された耕土の耕深が変化する。この耕深の変化は、稲の生育に悪影響を与える。
【0004】
そこで、代かき作業時に、耕盤の凹凸に応じて、走行機体に搭乗した作業者が操作スイッチを操作して代かき作業機の上下位置調整を行うことで、耕深を一定にすることができる。しかしながら、代かき作業は圃場に水を入れて行う作業であるため、水の多少によって実際の耕深を見誤って、耕深を一定にすることができなくなる虞がある。
【0005】
そこで、耕耘ロータ(文献ではロータリ作業体)の上部を覆うローターカバーの前端部に耕深の目安となる耕深確認ゲージを設けた代かき作業機が提案されている(特許文献1参照)。この耕深確認ゲージは、その進行方向前側が上方から下方に行くに従い後方に後退させた形状を有している。この耕深確認ゲージにより、代かき作業時にローターカバー端部より下方に突設したゲージ面が未代かき土壌面に没入した量により、耕耘ロータの耕深寸法を確認することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−330181号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
この従来の耕深確認ゲージは、ゲージ面が未代かき土壌面に没入した量を走行機体に搭乗した作業者が視認するものである。このため、圃場に入れられた水の多少によって、作業者がゲージ面の未代かき土壌面への没入量を見誤る虞がある。このゲージ面の没入量を見誤ると、作業者による耕耘ロータの位置調整も誤った調整となり、耕深を一定にすることができなくなる。
【0008】
また、このゲージは圃場の水面の近くに配設されているので、走行機体に搭乗している作業者は、このゲージを視認する際に、走行機体側に向かって斜め後方を振り返って視線を下方へ移す行為により、走行機体の直進性が維持できなくなる虞が生じる。
【0009】
本発明は、このような問題に鑑みてなされたものであり、代かき作業時に、耕耘ロータの位置調整が正確に行われて耕深を一定にすることができ、また耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
このような課題を解決するため、本発明の代かき作業機の耕深表示装置は、走行機体に装着され、機体に回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設されて耕耘ロータにより耕耘された耕土を整地する第1整地板と、該第1整地板の後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板とを備える代かき作業機の耕深表示装置であって、一端側が機体に回動自在に接続されて他端側が第2整地板に回動自在に接続され、耕耘ロータにより耕耘された耕土の耕深に応じた第1整地板に対する第2整地板の回動に伴って上下方向に回動するリンク機構部と、リンク機構部の回動に応じて耕深を表示する耕深表示部とを有し、耕深表示部は、走行機体に搭乗した作業者が代かき作業機に向かって斜め後方へ振り返ったときの該作業者の視線の延長先に設けられていることを特徴とする(請求項1)。
【0011】
また、本発明の耕深表示部は、機体幅方向の動きによって耕深表示を行うことを特徴とする(請求項2)。
【0012】
また、本発明のリンク機構部は、一端側が機体に回動自在に設けられて他端側が機体進行方向後側に延びて上下方向に揺動可能な揺動アームと、該揺動アームの他端部と第2整地板の上面との間に接続された連結ロッドとを有し、耕深表示部は、機体に設けられて耕深の複数の異なる程度を示す記号が表示された表示部と、揺動アームの回動に応じて表示部に表示された複数の記号に沿って移動自在な指針アームとを有し、一端側が揺動アームに回動自在に接続され、他端側が指針アームに接続されて、揺動アームの揺動にしたがって指針アームを移動させる連結ワイヤが設けられていることを特徴とする(請求項3)。
【0013】
また、本発明の連結ワイヤは、附勢手段(実施の形態における引っ張りばね66、ねじりコイルばね67)によって常に伸長方向に附勢されていることを特徴とする(請求項4)。
【0014】
また、本発明の指針アームは、その伸長方向の中間部が表示部に回動自在に取り付けられて該中間部を支点とし該表示部に沿って回動自在であり、中間部に対する指針アームの一端側が連結ワイヤに接続され、指針アームの他端側が表示部に表示された複数の記号に沿って移動自在であることを特徴とする(請求項5)。
【0015】
また本発明は、指針アームの中間部が、該指針アームの他端側と中間部との距離が指針アームの一端側と中間部との距離よりも大きくなる位置に設けられていることを特徴とする(請求項6)。
【発明の効果】
【0016】
本発明に係わる代かき作業機の耕深表示装置によれば、上記特徴を有することで、代かき作業時に、耕耘ロータの位置調整が正確に行われて耕深を一定にすることができ、また耕深の確認時に走行機体の直進性が維持可能な代かき作業機の耕深表示装置を提供することができる。
【図面の簡単な説明】
【0017】
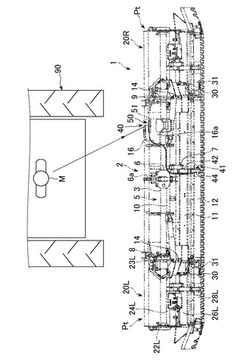
【図1】本発明の一実施の形態に係わる耕深表示装置が搭載された代かき作業機の側面側の構造図を示す。
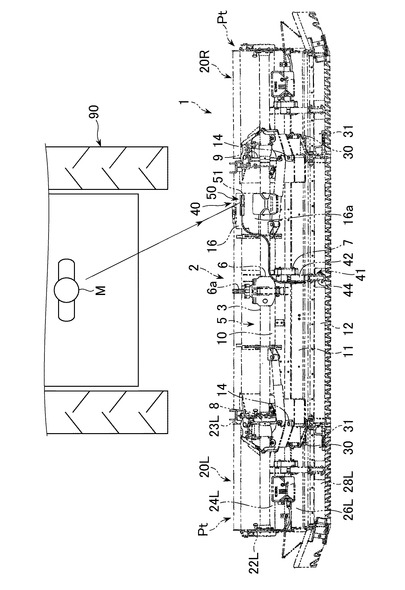
【図2】本発明の耕深表示装置が搭載された代かき作業機の平面側の構造図を示す。
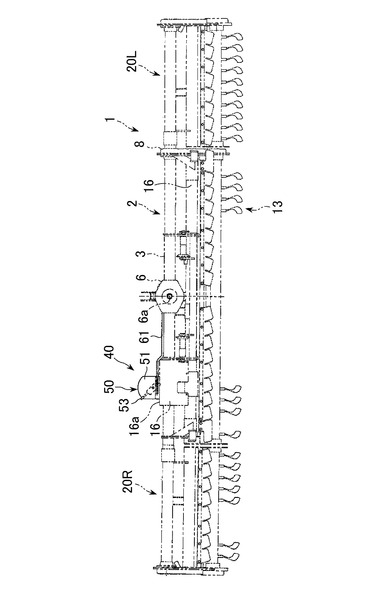
【図3】本発明の耕深表示装置が搭載された代かき作業機の正面側の構造図を示す。
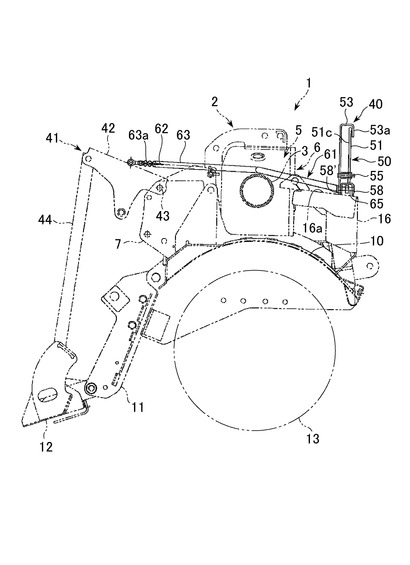
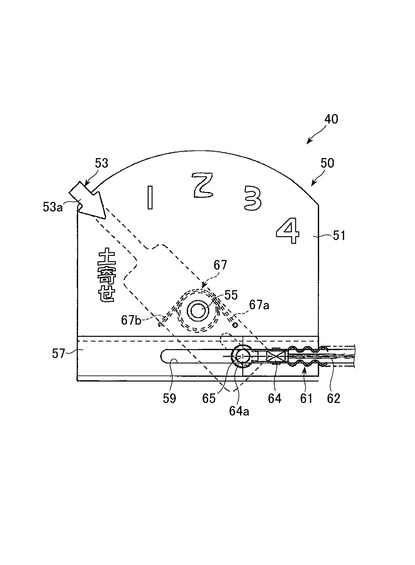
【図4】本発明の耕深表示装置の正面図を示す。
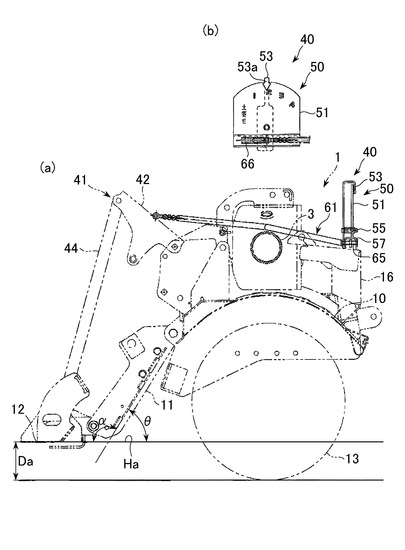
【図5】同図(a)は、耕深が比較的に浅いときの耕深表示装置の作動を説明するための代かき作業機の側面側の構造図を示し、同図(b)はこのときの耕深表示装置の表示状態を示す。
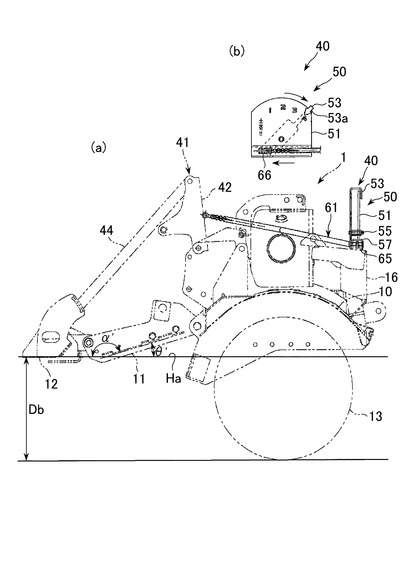
【図6】同図(a)は、耕深が比較的に深いときの耕深表示装置の作動を説明するための代かき作業機の側面側の構造図を示し、同図(b)はこのときの耕深表示装置の表示状態を示す。
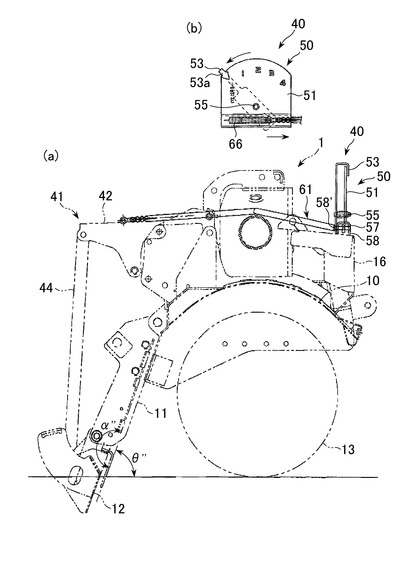
【図7】同図(a)は、第2整地板が土寄せ位置にあるときの耕深表示装置の作動を説明するための代かき作業機の側面側の構造図を示し、同図(b)はこのときの耕深表示装置の表示状態を示す。
【図8】本発明の他の実施形態に係わる耕深表示装置の正面図を示す。
【図9】本発明の他の実施形態に係わる耕深表示装置の平面図を示す。
【発明を実施するための形態】
【0018】
以下、本発明の好ましい実施の形態を図1〜図9に基づいて説明する。本実施形態は、代かき作業機のうち作業機本体の両側に左右の作業体が折り畳み且つ展開可能な代かき作業機を例にして説明する。先ず、本発明に係わる耕深表示装置を説明する前に、代かき作業機について、図1(側面側構造図)及び図2(平面側構造図)を用いて説明する。
【0019】
代かき作業機1は、図1及び図2に示すように、走行機体90の後部に装着されて走行機体90の前進走行とともに進行して代かき作業を行うものであり、機体前進方向に対して左右方向の中央部に配置された作業機本体2と、この左右両端部に上下方向に回動可能に取り付けられた左作業体20L及び右作業体20Rとを備え、作業機本体2、左作業体20L、右作業体20Rによって3分割構造になっている。
【0020】
作業機本体2は、左右方向に延びる主フレーム3を有した機体5の前部に、走行機体90の後部に設けられた図示しない3点リンク連結機構が連結されて、走行機体90の後部に対して昇降可能に装着される。主フレーム3の左右方向の中央部には前方へ突出する入力軸6aを備えたギアボックス6が設けられ、走行機体90のPTO軸からユニバーサルジョイント等の動力伝達手段を介して動力が入力軸6aに伝達されるようになっている。
【0021】
主フレーム3の左右両端部には伝動フレーム(チェーンケース)8と側部フレーム9が垂設され、伝動フレーム(チェーンケース)8と側部フレーム9の下部間には多数の耕耘爪を取り付けた耕耘ロータ13が回転自在に支持されている。主フレーム3内には伝動機構が設けられ、この伝動機構が伝動フレーム(チェーンケース)8内の伝動機構と連結されて、入力軸6aに伝達された動力がこれらの伝動機構を介して作業機本体2の耕耘ロータ13と左作業体20L、右作業体20Rに設けられた耕耘ロータに伝達されて、作業機本体2の耕耘ロータ13と左作業体20L、右作業体20Rに設けられた耕耘ロータを所定方向に回転させるように構成されている。
【0022】
伝動フレーム(チェーンケース)8と側部フレーム9の上部間には耕耘ロータ13の上部を覆うシールドカバー10が設けられている。このシールドカバー10の後端部には、前端部が上下方向に回動自在に取り付けられて後側が斜め下方へ延びる第1整地板11が取り付けられ、第1整地板11の後端部によって耕土表面が平らに整地される。第1整地板11の後端部には、第2整地板12が上下方向に回動自在に取り付けられ、この第2整地板12によって圃場の耕土表面が平らに整地される。
【0023】
作業機本体2の左右両端部には、シールドカバー10の上方位置に前後方向に延びる軸部14が設けられ、この軸部14を中心として左作業体20L、右作業体20Rが上下方向に回動自在に設けられている。これら左作業体20L及び右作業体20Rは、作業者によって作業機本体2の上方に折り畳まれる格納位置と、作業機本体2の側方に展開される展開位置Ptとの間を移動する。
【0024】
左作業体20L、右作業体20Rは、左右対称の構造であり、左作業体20Lで説明すると、左右両側に側部フレーム22L,23Lが配設され、これらの側部フレーム22L,23Lの下部間には耕耘ロータが回転自在に支持され、側部フレーム22L,23Lの上部間には耕耘ロータの上部を覆うシールドカバー左24Lが設けられている。シールドカバー左24Lの後端部には、第1整地板左26Lが上下方向に回動自在に取り付けられ、第1整地板左26Lの後端部に第2整地板左28Lが上下方向に回動自在に取り付けられている。
【0025】
第1整地板左26L及び第2整地板左28Lは、左作業体20Lの展開姿勢時に、作業機本体2の第1整地板11及び第2整地板12に接合して、第1整地板左26L及び第2整地板左28Lに設けられた連結部材30,31を介して連結され、左作業体20Lの折り畳み姿勢時には、連結部材30,31の連結が解除されて第1整地板左26L及び第2整地板左28Lが作業機本体2の外端部から離反して第1整地板11及び第2整地板12との接合が解除されるようになっている。
【0026】
次に、図1〜図4を用いて代かき作業機1に設けられた耕深表示装置40について説明する。耕深表示装置40は、図1及び図2に示すように、作業機本体2に設けられた第2整地板12の上下方向の回動に伴って上下方向に移動自在なリンク機構部41と、リンク機構部41の移動に応じて耕深を表示する耕深表示部50とを有してなる。
【0027】
リンク機構部41は、ギアボックス6の後部に配設された支持板7に前端部が回動自在に接続されて後側が機体進行方向後側に延びて上下方向に揺動可能な揺動アーム42と、揺動アーム42の後端部と第2整地板12の上面との間に接続された連結ロッド44とを有してなる。つまり、揺動アーム42は連結ロッド44を介して第2整地板12に接続されている。揺動アーム42の前端部は支持板7の後部に横方向に延びる軸部43を回動支点として回動自在に接続されている。連結ロッド44の上下両端部は、揺動アーム42及び第2整地板12に対して回動自在に接続されている。このため、第2整地板12が上下方向に回動すると、連結ロッド44を介して揺動アーム42が軸部43を回動支点として上下方向に回動する。
【0028】
作業機本体2のシールドカバー10の右側前部には、図3に示すように、台座部16が設けられている。この台座部16は、板金を折り曲げて上部に平面部16aが形成されている。平面部16aは入力軸6aよりも上方位置に配置されている。この台座部16の平面部16a上に耕深表示部50が取り付けられている。
【0029】
耕深表示部50は、図4に示すように、耕深の複数の異なる程度を表示する数字や文字が所定間隔を有して表示された表示部51と、表示部51に回動自在に支持されて揺動アーム42の回動に応じて表示部51に表示された複数の文字等に沿って移動自在な指針アーム53とを有してなる。
【0030】
表示部51は、正面視において、長方形状に形成された板状部材であり、作業機本体2の左右方向に延びて表示部51の前面51aが走行機体側に向いた状態で配置されている(図2参照)。表示部51の上端縁51bは上方に凸状に湾曲形成されている。この上端縁51bは、後述する指針アーム53を回動自在に支持する軸部55を中心として所定半径Rが描く軌跡に沿った円弧状に形成されている。
【0031】
表示部51の前面51aの上部には、表示部幅方向一方側から他方側に向かって文字と複数の数字が表示部51の上端縁51bに沿って記載されている。本実施例では、表示部51の前面51aの左側に「土寄せ」の文字が記載され、この文字よりも右側の位置に「1」の数字が記載され、「1」の数字よりも右側の位置に「2」,「3」,「4」の数字が所定間隔を有して記載されている。
【0032】
「土寄せ」の文字は、第2整地板12が土寄せ可能な姿勢(図7参照)にあることを示す文字である。数字の「1」、「2」、「3」、「4」は、耕深の程度を示す文字であり、数字が大きくなるほど、耕深が深くなることを表している。なお、耕深の程度を表すものは、数字に限るものではなく、記号、図形、文字でもよい。
【0033】
また、表示部51は、図2及び図3に示すように、作業機本体2の左右方向右側の位置であって、走行機体90に搭乗した作業者Mが代かき作業機1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に配置されている。このため、作業者Mは体を代かき作業機側に僅かにひねり又はひねることなく、頭を代かき作業機1に向かって斜め後方側へ振り返るだけで、表示部51を視認することができる。
【0034】
表示部51の下部には、図1及び図4に示すように、作業機本体2の左右方向に延びて側面視において逆U字状に形成されたワイヤ支持部57が一体的に設けられている。このワイヤ支持部57の下端部が台座部16に固定されて、表示部51はワイヤ支持部57を介して台座部16に取り付けられている。ワイヤ支持部57は、前後方向に所定間隔を有して配置された一対の側板部58,58'を有する。これらの側板部58,58'には、その周方向一端側から他端側に延びて後述する連結ワイヤ61の移動を案内する一対の案内孔59が設けられている。これらの案内孔59間にピン65が挿通されて案内孔59に沿って移動する。このピン65に後述する連結ワイヤ61の一端側が係止されている。連結ワイヤ61の詳細については後述する。
【0035】
指針アーム53は、表示部51の後面51cに沿って上方へ延びて表示部51の上端縁51bを超えて表示部51の前側に屈曲し、表示部51の前面51aを超えて下方へ屈曲して前面51aに沿って延びるように構成されている。表示部51の前面51aに沿って延びる指針アーム55の先端部には、表示部51に記載された数字等を指し示す矢印状に形成された指針53aが設けられている。
【0036】
指針アーム53は、この延伸方向中間部が表示部51の後面51cに設けられた軸部55に回動自在に取り付けられて表示部51の前面51aに沿って回動自在である。軸部55は、表示部51の下側の幅方向中央部に設けられて表示部51の後方側へ突出して、前述したように指針アーム55の回動支点となる。
【0037】
指針アーム53の回動支点側は正面視において長方形状に形成され、この指針アーム53の下側の底部には、指針アーム53の長手方向に延びる長孔53bが設けられている。長孔53bには後述する連結ワイヤ61の端部に通されたピン65が回動自在に挿通されている。この長孔53bは、連結ワイヤ61の移動に応じてピン65が案内孔59に沿って移動しながら指針アーム53を回動させるためのものである。このため、連結ワイヤ61が案内孔59に沿って左右方向一方側から他方側に移動すると、指針アーム53は軸部55を回動支点として表示部51の左右方向他方側から一方側へ回動する。
【0038】
連結ワイヤ61は、柔軟性を有して筒状に形成されたアウター63内にワイヤ62が挿通されて構成されている。このため、連結ワイヤ61は柔軟性を有して変形可能である。連結ワイヤ61の一端部は指針アーム53に接続され、他端部は揺動アーム42の上部に回動自在に接続されて、連結ワイヤ61は指針アーム53と揺動アーム42との間を屈曲しながら配設されている(図2参照)。このように、連結ワイヤ61は柔軟性を有して変形可能であるので、耕深表示装置50の表示部51を作業機本体2上に自由に配置することができ、表示部51の配置の自由度を向上させることができる。
【0039】
連結ワイヤ61のアウター63は、その両端部にアウター63の伸長方向に伸縮自在な蛇腹状の伸縮部63aを有している。この伸縮部63aの先端側の内部には、ワイヤ62の端部を固定するアウターエンド64が一体的に取り付けられている。このアウターエンド64の先端部にはピン65を係止するための接続端子64aが設けられている。接続端子64aは円環状に形成されて前述したピン65を挿通可能である。このため、揺動アーム42の揺動に伴って連結ワイヤ61が移動すると、接続端子64aを介してピン65が案内孔59に沿って移動して指針アーム53を回動させる。
【0040】
このように構成された連結ワイヤ61の接続端子64aには、ワイヤ支持部58との間に掛止された引っ張りばね66が設けられている。この引っ張りばね66は、常に連結ワイヤ61に張力が作用するように設けられている。このため、連結ワイヤ61は常に緊張した状態にあるので、揺動アーム42の回動作を直ちに連結ワイヤ61に伝達させることができる。従って、指針アーム53は、代かき作業時の耕深の変化に迅速に反応して耕深を指し示すことができる。また、指針アーム53の回動支点となる軸部55の中心軸線と指針53aの先端との距離Xは、軸部55の中心軸線と指針アーム53を回動させるピン65の中心軸との距離Yよりも大きくなるように、指針アーム53は構成されている。このため、連結ワイヤ61の移動量(ストローク)に比べて指針53aが指し示す数字や文字の振り幅を大きくすることができ、数字等が記載された表示部51の大きさを見やすい大きさに設計することができる。
【0041】
なお、代かき作業機1には、土寄せ作業を行う際に、第1整地板11及び第2整地板12を下方へ揺動させた状態で、これらの整地板の揺動を規制可能な図示しないロック装置が設けられている。このロック装置は、作業者が操作可能な操作レバーを備え、操作レバーの操作によって揺動アーム42の回動が規制され及び規制解除されて、第1整地板11及び第2整地板12の回動を規制し及び規制解除する。
【0042】
次に、耕深表示装置40の指針53aが指し示す数字(1〜4)と耕耘ロータ13による耕土の耕深Dとの関係を、図5及び図6を用いて説明する。耕深表示装置40は、図5に示すように、耕耘ロータ13による耕土の耕深Daが浅い場合には、第1整地板11は圃場表面Haに対して角度θ(図面ではθ=約60°)を有して傾く。この第1整地板11の回動に伴って第2整地板12は第1整地板11に対して回動して、第2整地板12は第1整地板11に対して角度α(図面ではα=約120°)を有して圃場表面Haに接地する。また、第2整地板12の回動に伴って連結ロッド44を介して揺動アーム42が上下方向に回動し、揺動アーム42の回動に応じて連結ワイヤ61が移動して、指針アーム53の指針53aが数字の「2」を指し示す。
【0043】
これに対し、耕深Dbが比較的に深い場合には、図6に示すように、第1整地板11は、図5の場合と比較して、より上方へ回動して圃場表面Haに対して角度θよりも小さな角度θ'(図面ではθ'=約18°)を有して傾く。この第1整地板11の回動に伴って第2整地板12は、第1整地板11に対して角度α'(図面ではα'=約162°)を有して圃場表面Haに接地する。また、第2整地板12の回動に伴って連結ロッド44を介して揺動アーム42が上下方向に回動し、揺動アーム42の回動に応じて連結ワイヤ61が表示部51の左右方向左側に移動して指針アーム53の指針53aが数字の「4」を指し示す。
【0044】
このように、本願発明の耕深表示装置40は、耕深Dの深さに応じて第1整地板11に対して第2整地板12が回動し、この第2整地板12の回動に伴って揺動アーム42が上下方向に回動し、揺動アーム42の回動に応じて連結ワイヤ61が移動して指針53aを移動させる。このため、走行機体90に搭乗した作業者Mが耕深表示装置40の耕深表示部50の指針53aで示された数字を目視で確認することで、正確な耕深を知ることができる。従って、代かき作業中に指針53aが大きな数字側(数字の4側)にずれた場合には、作業者は、耕深が浅くなるように三点リンク連結機構を介して代かき作業機1を持ち上げるための操作をする。また代かき作業中に指針53aが小さい数字側(数字の1側)にずれた場合には、作業者は、耕深が深くなるように三点リンク連結機構を介して代かき作業機1を下方に降ろす操作をする。従って、代かき作業時の耕深を一定にすることができる。
【0045】
また耕深表示装置40の耕深表示部50は、作業者Mが体を代かき作業機側に僅かにひねり又はひねることなく、頭を代かき作業機1に向かって斜め後方側へ振り返るだけで視認可能な位置に配設されているので、耕深の確認を容易に行うことができ、走行機体に搭乗した作業者のハンドル操作がふらつく度合いを小さくすることができる。このため、耕深の確認時における走行機体90の直進性を維持することができる。
【0046】
次に、代かき作業機1によって土寄せ作業を行う場合の耕深表示装置40の作動について、図7を用いて説明する。土寄せ作業を行う場合には、走行機体90の三点リンク連結機構を介して代かき作業機1を持ち上げて、第2整地板12を圃場に対して非接触状態にする。そして、図7に示すように、図5の場合と比較して、揺動アーム42のより下方への回動により、第1整地板11を圃場表面Haに対して角度θよりも大きな角度θ''(図面ではθ''=約70°)を有して傾ける。また第1整地板11の回動に伴って第2整地板12を第1整地板11に対して角度α''(図面ではα''=約180°)を有して傾ける。そして、前述したロック装置の操作レバーの操作によって揺動アーム42をロック状態にして、第2整地板12の進行方向に対する前後方向への回動を規制する。
【0047】
ここで、揺動アーム42の下方への回動にともない、連結ワイヤ61は揺動アーム42側へ移動する。この連結ワイヤ61の移動に伴って、指針アーム53は軸部55を支点として左側へ回動して、指針53aが「土寄せ」を指し示す。代かき作業機1が土寄せ状態になると、走行機体90の三点リンク連結機構を介して代かき作業機1を下げる。そして、走行機体90を前進させると、第1整地板11及び第2整地板12によって圃場の土を走行機体進行方向側へ寄せることができる。
【0048】
なお、前述した実施例では、連結ワイヤ61に張力を附勢する手段として引っ張りばね66を示したが、図8に示すように、ねじりコイルばね67でもよい。このねじりコイルばね67は指針アーム53の下側と表示部51との間の軸部55に挿通された状態で設けられ、ねじりコイルばね67の一方側の腕部67aは表示部51に接続され、他方側の腕部67bは指針アーム53の下側に接続されて、他方側の腕部67bは常に指針アーム53を表示部51の左右方向右側へ附勢している。このため、ねじりコイルばね67の附勢によって指針アーム53に接続された連結ワイヤ61を常に引っ張った状態にすることができる。
【0049】
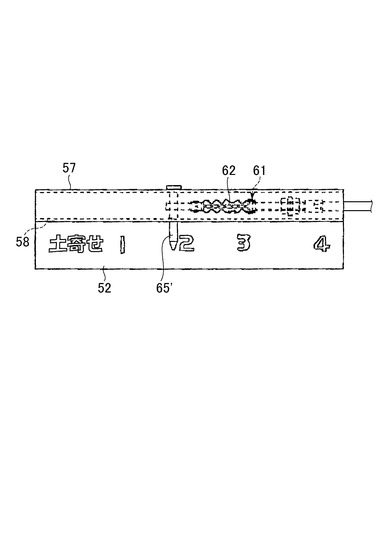
また、前述した実施形態の耕深表示装置40の表示部51は、数字等が円弧状に配置されたゲージに対して指針53aが移動するものを示したが、図9に示すように、数字等が直線状に配置されたゲージに対して指針が移動するようにしてもよい。この場合、ワイヤ支持部57の走行機体側の側板部58に数字等が表示された表示部52を突出して設ける。表示部52は平面視において矩形状に形成され、側板部58の案内孔から延出するピン65'の下方に配設される。表示部52上には揺動アーム側と反対側から「土寄せ」の文字、及び「1」、「2」、「3」、「4」の数字が記載され、ピン65'が指針となる。
【0050】
このように表示部52を構成すると、前述した表示部51と比較して、構造が簡素化されて、小型化し且つ製造コストを安価にすることができる。なお、連結ワイヤをプッシュプル式のもの(プッシュプルケーブル)にすれば、さらにコンパクト化を図ることができる。
【0051】
また、前述した実施形態の耕深表示装置40は、図7に示すように、耕深に応じて機械的に指針53aを移動させるものを示したが、表示部51に耕深に対応するランプ(図示せず)を設けてもよい。この場合には、ワイヤ支持部57に、連結ワイヤ61の表示部側の端部の位置を検出するセンサ(例えば、リミットスイッチ、光センサ等)と、連結ワイヤ61の端部の位置に対応した耕深を表示するランプとを設け、センサによって検出された連結ワイヤ61の位置に応じた耕深に対応するランプを点灯させる。
【0052】
このように、耕深表示装置70の表示部71に複数のランプを備えて構成することで、機械的に指針53aを移動させる場合と比較して、野外の天候が不順である場合等における視認性を向上させることができる。
【0053】
また、前述した実施形態の代かき作業機1は、図2に示すように、作業機本体2に対して左作業体20L及び右作業体20Rを手動で回動させるものであるが、これらの作業体を電動で回動させるようにしてもよい。この場合には、作業機本体2と左作業体20L及び右作業体20Rとの間に電動式油圧シリンダを設け、このシリンダを伸縮させることで、作業機本体2に対して左作業体20L及び右作業体20Rを回動させる。電動式油圧シリンダの伸縮制御は、作業者が搭乗する走行機体90の運転席の近くに設けられたコントローラによって行われる。
【0054】
また、前述した実施形態では、左作業体20L、右作業体20Rが作業機本体2に対して折り畳み可能な構造の代かき作業機1を例にしたが、左作業体20L、右作業体20Rを無くした代かき作業機でもよい。
【符号の説明】
【0055】
1 代かき作業機
5 機体
10 シールドカバー(カバー部)
11 第1整地板
12 第2整地板
13 耕耘ロータ
40 耕深表示装置
41 リンク機構部
42 揺動アーム
44 連結ロッド
50 耕深表示部
51 表示部
53 指針アーム
61 連結ワイヤ
66 引っ張りばね(附勢手段)
67 ねじりコイルばね(附勢手段)
90 走行機体
【技術分野】
【0001】
本発明は、耕耘ロータにより耕耘された耕土を整地する第1整地板と、この後部に上下方向に回動自在に設けられて耕土表面を均平にする第2整地板とを備える代かき作業機の耕深表示装置に関する。
【背景技術】
【0002】
このような第1整地板の後部に第2整地板を備える代かき作業機は、一般的に走行可能な走行機体の後部に三点リンク連結機構を介して昇降可能に連結されて、走行機体の前進走行とともに進行しながら代かき作業を行う。代かき作業機の昇降操作は、走行機体に搭乗した作業者が走行機体に設けられた操作スイッチ(レバー)によって行われる。
【0003】
この代かき作業機によって代かき作業を行う場合、圃場の耕盤に凹凸があると、走行機体が上下方向に移動するに伴って代かき作業機も上下方向に移動して、耕耘ロータによって耕耘された耕土の耕深が変化する。この耕深の変化は、稲の生育に悪影響を与える。
【0004】
そこで、代かき作業時に、耕盤の凹凸に応じて、走行機体に搭乗した作業者が操作スイッチを操作して代かき作業機の上下位置調整を行うことで、耕深を一定にすることができる。しかしながら、代かき作業は圃場に水を入れて行う作業であるため、水の多少によって実際の耕深を見誤って、耕深を一定にすることができなくなる虞がある。
【0005】
そこで、耕耘ロータ(文献ではロータリ作業体)の上部を覆うローターカバーの前端部に耕深の目安となる耕深確認ゲージを設けた代かき作業機が提案されている(特許文献1参照)。この耕深確認ゲージは、その進行方向前側が上方から下方に行くに従い後方に後退させた形状を有している。この耕深確認ゲージにより、代かき作業時にローターカバー端部より下方に突設したゲージ面が未代かき土壌面に没入した量により、耕耘ロータの耕深寸法を確認することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−330181号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
この従来の耕深確認ゲージは、ゲージ面が未代かき土壌面に没入した量を走行機体に搭乗した作業者が視認するものである。このため、圃場に入れられた水の多少によって、作業者がゲージ面の未代かき土壌面への没入量を見誤る虞がある。このゲージ面の没入量を見誤ると、作業者による耕耘ロータの位置調整も誤った調整となり、耕深を一定にすることができなくなる。
【0008】
また、このゲージは圃場の水面の近くに配設されているので、走行機体に搭乗している作業者は、このゲージを視認する際に、走行機体側に向かって斜め後方を振り返って視線を下方へ移す行為により、走行機体の直進性が維持できなくなる虞が生じる。
【0009】
本発明は、このような問題に鑑みてなされたものであり、代かき作業時に、耕耘ロータの位置調整が正確に行われて耕深を一定にすることができ、また耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
このような課題を解決するため、本発明の代かき作業機の耕深表示装置は、走行機体に装着され、機体に回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設されて耕耘ロータにより耕耘された耕土を整地する第1整地板と、該第1整地板の後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板とを備える代かき作業機の耕深表示装置であって、一端側が機体に回動自在に接続されて他端側が第2整地板に回動自在に接続され、耕耘ロータにより耕耘された耕土の耕深に応じた第1整地板に対する第2整地板の回動に伴って上下方向に回動するリンク機構部と、リンク機構部の回動に応じて耕深を表示する耕深表示部とを有し、耕深表示部は、走行機体に搭乗した作業者が代かき作業機に向かって斜め後方へ振り返ったときの該作業者の視線の延長先に設けられていることを特徴とする(請求項1)。
【0011】
また、本発明の耕深表示部は、機体幅方向の動きによって耕深表示を行うことを特徴とする(請求項2)。
【0012】
また、本発明のリンク機構部は、一端側が機体に回動自在に設けられて他端側が機体進行方向後側に延びて上下方向に揺動可能な揺動アームと、該揺動アームの他端部と第2整地板の上面との間に接続された連結ロッドとを有し、耕深表示部は、機体に設けられて耕深の複数の異なる程度を示す記号が表示された表示部と、揺動アームの回動に応じて表示部に表示された複数の記号に沿って移動自在な指針アームとを有し、一端側が揺動アームに回動自在に接続され、他端側が指針アームに接続されて、揺動アームの揺動にしたがって指針アームを移動させる連結ワイヤが設けられていることを特徴とする(請求項3)。
【0013】
また、本発明の連結ワイヤは、附勢手段(実施の形態における引っ張りばね66、ねじりコイルばね67)によって常に伸長方向に附勢されていることを特徴とする(請求項4)。
【0014】
また、本発明の指針アームは、その伸長方向の中間部が表示部に回動自在に取り付けられて該中間部を支点とし該表示部に沿って回動自在であり、中間部に対する指針アームの一端側が連結ワイヤに接続され、指針アームの他端側が表示部に表示された複数の記号に沿って移動自在であることを特徴とする(請求項5)。
【0015】
また本発明は、指針アームの中間部が、該指針アームの他端側と中間部との距離が指針アームの一端側と中間部との距離よりも大きくなる位置に設けられていることを特徴とする(請求項6)。
【発明の効果】
【0016】
本発明に係わる代かき作業機の耕深表示装置によれば、上記特徴を有することで、代かき作業時に、耕耘ロータの位置調整が正確に行われて耕深を一定にすることができ、また耕深の確認時に走行機体の直進性が維持可能な代かき作業機の耕深表示装置を提供することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施の形態に係わる耕深表示装置が搭載された代かき作業機の側面側の構造図を示す。
【図2】本発明の耕深表示装置が搭載された代かき作業機の平面側の構造図を示す。
【図3】本発明の耕深表示装置が搭載された代かき作業機の正面側の構造図を示す。
【図4】本発明の耕深表示装置の正面図を示す。
【図5】同図(a)は、耕深が比較的に浅いときの耕深表示装置の作動を説明するための代かき作業機の側面側の構造図を示し、同図(b)はこのときの耕深表示装置の表示状態を示す。
【図6】同図(a)は、耕深が比較的に深いときの耕深表示装置の作動を説明するための代かき作業機の側面側の構造図を示し、同図(b)はこのときの耕深表示装置の表示状態を示す。
【図7】同図(a)は、第2整地板が土寄せ位置にあるときの耕深表示装置の作動を説明するための代かき作業機の側面側の構造図を示し、同図(b)はこのときの耕深表示装置の表示状態を示す。
【図8】本発明の他の実施形態に係わる耕深表示装置の正面図を示す。
【図9】本発明の他の実施形態に係わる耕深表示装置の平面図を示す。
【発明を実施するための形態】
【0018】
以下、本発明の好ましい実施の形態を図1〜図9に基づいて説明する。本実施形態は、代かき作業機のうち作業機本体の両側に左右の作業体が折り畳み且つ展開可能な代かき作業機を例にして説明する。先ず、本発明に係わる耕深表示装置を説明する前に、代かき作業機について、図1(側面側構造図)及び図2(平面側構造図)を用いて説明する。
【0019】
代かき作業機1は、図1及び図2に示すように、走行機体90の後部に装着されて走行機体90の前進走行とともに進行して代かき作業を行うものであり、機体前進方向に対して左右方向の中央部に配置された作業機本体2と、この左右両端部に上下方向に回動可能に取り付けられた左作業体20L及び右作業体20Rとを備え、作業機本体2、左作業体20L、右作業体20Rによって3分割構造になっている。
【0020】
作業機本体2は、左右方向に延びる主フレーム3を有した機体5の前部に、走行機体90の後部に設けられた図示しない3点リンク連結機構が連結されて、走行機体90の後部に対して昇降可能に装着される。主フレーム3の左右方向の中央部には前方へ突出する入力軸6aを備えたギアボックス6が設けられ、走行機体90のPTO軸からユニバーサルジョイント等の動力伝達手段を介して動力が入力軸6aに伝達されるようになっている。
【0021】
主フレーム3の左右両端部には伝動フレーム(チェーンケース)8と側部フレーム9が垂設され、伝動フレーム(チェーンケース)8と側部フレーム9の下部間には多数の耕耘爪を取り付けた耕耘ロータ13が回転自在に支持されている。主フレーム3内には伝動機構が設けられ、この伝動機構が伝動フレーム(チェーンケース)8内の伝動機構と連結されて、入力軸6aに伝達された動力がこれらの伝動機構を介して作業機本体2の耕耘ロータ13と左作業体20L、右作業体20Rに設けられた耕耘ロータに伝達されて、作業機本体2の耕耘ロータ13と左作業体20L、右作業体20Rに設けられた耕耘ロータを所定方向に回転させるように構成されている。
【0022】
伝動フレーム(チェーンケース)8と側部フレーム9の上部間には耕耘ロータ13の上部を覆うシールドカバー10が設けられている。このシールドカバー10の後端部には、前端部が上下方向に回動自在に取り付けられて後側が斜め下方へ延びる第1整地板11が取り付けられ、第1整地板11の後端部によって耕土表面が平らに整地される。第1整地板11の後端部には、第2整地板12が上下方向に回動自在に取り付けられ、この第2整地板12によって圃場の耕土表面が平らに整地される。
【0023】
作業機本体2の左右両端部には、シールドカバー10の上方位置に前後方向に延びる軸部14が設けられ、この軸部14を中心として左作業体20L、右作業体20Rが上下方向に回動自在に設けられている。これら左作業体20L及び右作業体20Rは、作業者によって作業機本体2の上方に折り畳まれる格納位置と、作業機本体2の側方に展開される展開位置Ptとの間を移動する。
【0024】
左作業体20L、右作業体20Rは、左右対称の構造であり、左作業体20Lで説明すると、左右両側に側部フレーム22L,23Lが配設され、これらの側部フレーム22L,23Lの下部間には耕耘ロータが回転自在に支持され、側部フレーム22L,23Lの上部間には耕耘ロータの上部を覆うシールドカバー左24Lが設けられている。シールドカバー左24Lの後端部には、第1整地板左26Lが上下方向に回動自在に取り付けられ、第1整地板左26Lの後端部に第2整地板左28Lが上下方向に回動自在に取り付けられている。
【0025】
第1整地板左26L及び第2整地板左28Lは、左作業体20Lの展開姿勢時に、作業機本体2の第1整地板11及び第2整地板12に接合して、第1整地板左26L及び第2整地板左28Lに設けられた連結部材30,31を介して連結され、左作業体20Lの折り畳み姿勢時には、連結部材30,31の連結が解除されて第1整地板左26L及び第2整地板左28Lが作業機本体2の外端部から離反して第1整地板11及び第2整地板12との接合が解除されるようになっている。
【0026】
次に、図1〜図4を用いて代かき作業機1に設けられた耕深表示装置40について説明する。耕深表示装置40は、図1及び図2に示すように、作業機本体2に設けられた第2整地板12の上下方向の回動に伴って上下方向に移動自在なリンク機構部41と、リンク機構部41の移動に応じて耕深を表示する耕深表示部50とを有してなる。
【0027】
リンク機構部41は、ギアボックス6の後部に配設された支持板7に前端部が回動自在に接続されて後側が機体進行方向後側に延びて上下方向に揺動可能な揺動アーム42と、揺動アーム42の後端部と第2整地板12の上面との間に接続された連結ロッド44とを有してなる。つまり、揺動アーム42は連結ロッド44を介して第2整地板12に接続されている。揺動アーム42の前端部は支持板7の後部に横方向に延びる軸部43を回動支点として回動自在に接続されている。連結ロッド44の上下両端部は、揺動アーム42及び第2整地板12に対して回動自在に接続されている。このため、第2整地板12が上下方向に回動すると、連結ロッド44を介して揺動アーム42が軸部43を回動支点として上下方向に回動する。
【0028】
作業機本体2のシールドカバー10の右側前部には、図3に示すように、台座部16が設けられている。この台座部16は、板金を折り曲げて上部に平面部16aが形成されている。平面部16aは入力軸6aよりも上方位置に配置されている。この台座部16の平面部16a上に耕深表示部50が取り付けられている。
【0029】
耕深表示部50は、図4に示すように、耕深の複数の異なる程度を表示する数字や文字が所定間隔を有して表示された表示部51と、表示部51に回動自在に支持されて揺動アーム42の回動に応じて表示部51に表示された複数の文字等に沿って移動自在な指針アーム53とを有してなる。
【0030】
表示部51は、正面視において、長方形状に形成された板状部材であり、作業機本体2の左右方向に延びて表示部51の前面51aが走行機体側に向いた状態で配置されている(図2参照)。表示部51の上端縁51bは上方に凸状に湾曲形成されている。この上端縁51bは、後述する指針アーム53を回動自在に支持する軸部55を中心として所定半径Rが描く軌跡に沿った円弧状に形成されている。
【0031】
表示部51の前面51aの上部には、表示部幅方向一方側から他方側に向かって文字と複数の数字が表示部51の上端縁51bに沿って記載されている。本実施例では、表示部51の前面51aの左側に「土寄せ」の文字が記載され、この文字よりも右側の位置に「1」の数字が記載され、「1」の数字よりも右側の位置に「2」,「3」,「4」の数字が所定間隔を有して記載されている。
【0032】
「土寄せ」の文字は、第2整地板12が土寄せ可能な姿勢(図7参照)にあることを示す文字である。数字の「1」、「2」、「3」、「4」は、耕深の程度を示す文字であり、数字が大きくなるほど、耕深が深くなることを表している。なお、耕深の程度を表すものは、数字に限るものではなく、記号、図形、文字でもよい。
【0033】
また、表示部51は、図2及び図3に示すように、作業機本体2の左右方向右側の位置であって、走行機体90に搭乗した作業者Mが代かき作業機1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に配置されている。このため、作業者Mは体を代かき作業機側に僅かにひねり又はひねることなく、頭を代かき作業機1に向かって斜め後方側へ振り返るだけで、表示部51を視認することができる。
【0034】
表示部51の下部には、図1及び図4に示すように、作業機本体2の左右方向に延びて側面視において逆U字状に形成されたワイヤ支持部57が一体的に設けられている。このワイヤ支持部57の下端部が台座部16に固定されて、表示部51はワイヤ支持部57を介して台座部16に取り付けられている。ワイヤ支持部57は、前後方向に所定間隔を有して配置された一対の側板部58,58'を有する。これらの側板部58,58'には、その周方向一端側から他端側に延びて後述する連結ワイヤ61の移動を案内する一対の案内孔59が設けられている。これらの案内孔59間にピン65が挿通されて案内孔59に沿って移動する。このピン65に後述する連結ワイヤ61の一端側が係止されている。連結ワイヤ61の詳細については後述する。
【0035】
指針アーム53は、表示部51の後面51cに沿って上方へ延びて表示部51の上端縁51bを超えて表示部51の前側に屈曲し、表示部51の前面51aを超えて下方へ屈曲して前面51aに沿って延びるように構成されている。表示部51の前面51aに沿って延びる指針アーム55の先端部には、表示部51に記載された数字等を指し示す矢印状に形成された指針53aが設けられている。
【0036】
指針アーム53は、この延伸方向中間部が表示部51の後面51cに設けられた軸部55に回動自在に取り付けられて表示部51の前面51aに沿って回動自在である。軸部55は、表示部51の下側の幅方向中央部に設けられて表示部51の後方側へ突出して、前述したように指針アーム55の回動支点となる。
【0037】
指針アーム53の回動支点側は正面視において長方形状に形成され、この指針アーム53の下側の底部には、指針アーム53の長手方向に延びる長孔53bが設けられている。長孔53bには後述する連結ワイヤ61の端部に通されたピン65が回動自在に挿通されている。この長孔53bは、連結ワイヤ61の移動に応じてピン65が案内孔59に沿って移動しながら指針アーム53を回動させるためのものである。このため、連結ワイヤ61が案内孔59に沿って左右方向一方側から他方側に移動すると、指針アーム53は軸部55を回動支点として表示部51の左右方向他方側から一方側へ回動する。
【0038】
連結ワイヤ61は、柔軟性を有して筒状に形成されたアウター63内にワイヤ62が挿通されて構成されている。このため、連結ワイヤ61は柔軟性を有して変形可能である。連結ワイヤ61の一端部は指針アーム53に接続され、他端部は揺動アーム42の上部に回動自在に接続されて、連結ワイヤ61は指針アーム53と揺動アーム42との間を屈曲しながら配設されている(図2参照)。このように、連結ワイヤ61は柔軟性を有して変形可能であるので、耕深表示装置50の表示部51を作業機本体2上に自由に配置することができ、表示部51の配置の自由度を向上させることができる。
【0039】
連結ワイヤ61のアウター63は、その両端部にアウター63の伸長方向に伸縮自在な蛇腹状の伸縮部63aを有している。この伸縮部63aの先端側の内部には、ワイヤ62の端部を固定するアウターエンド64が一体的に取り付けられている。このアウターエンド64の先端部にはピン65を係止するための接続端子64aが設けられている。接続端子64aは円環状に形成されて前述したピン65を挿通可能である。このため、揺動アーム42の揺動に伴って連結ワイヤ61が移動すると、接続端子64aを介してピン65が案内孔59に沿って移動して指針アーム53を回動させる。
【0040】
このように構成された連結ワイヤ61の接続端子64aには、ワイヤ支持部58との間に掛止された引っ張りばね66が設けられている。この引っ張りばね66は、常に連結ワイヤ61に張力が作用するように設けられている。このため、連結ワイヤ61は常に緊張した状態にあるので、揺動アーム42の回動作を直ちに連結ワイヤ61に伝達させることができる。従って、指針アーム53は、代かき作業時の耕深の変化に迅速に反応して耕深を指し示すことができる。また、指針アーム53の回動支点となる軸部55の中心軸線と指針53aの先端との距離Xは、軸部55の中心軸線と指針アーム53を回動させるピン65の中心軸との距離Yよりも大きくなるように、指針アーム53は構成されている。このため、連結ワイヤ61の移動量(ストローク)に比べて指針53aが指し示す数字や文字の振り幅を大きくすることができ、数字等が記載された表示部51の大きさを見やすい大きさに設計することができる。
【0041】
なお、代かき作業機1には、土寄せ作業を行う際に、第1整地板11及び第2整地板12を下方へ揺動させた状態で、これらの整地板の揺動を規制可能な図示しないロック装置が設けられている。このロック装置は、作業者が操作可能な操作レバーを備え、操作レバーの操作によって揺動アーム42の回動が規制され及び規制解除されて、第1整地板11及び第2整地板12の回動を規制し及び規制解除する。
【0042】
次に、耕深表示装置40の指針53aが指し示す数字(1〜4)と耕耘ロータ13による耕土の耕深Dとの関係を、図5及び図6を用いて説明する。耕深表示装置40は、図5に示すように、耕耘ロータ13による耕土の耕深Daが浅い場合には、第1整地板11は圃場表面Haに対して角度θ(図面ではθ=約60°)を有して傾く。この第1整地板11の回動に伴って第2整地板12は第1整地板11に対して回動して、第2整地板12は第1整地板11に対して角度α(図面ではα=約120°)を有して圃場表面Haに接地する。また、第2整地板12の回動に伴って連結ロッド44を介して揺動アーム42が上下方向に回動し、揺動アーム42の回動に応じて連結ワイヤ61が移動して、指針アーム53の指針53aが数字の「2」を指し示す。
【0043】
これに対し、耕深Dbが比較的に深い場合には、図6に示すように、第1整地板11は、図5の場合と比較して、より上方へ回動して圃場表面Haに対して角度θよりも小さな角度θ'(図面ではθ'=約18°)を有して傾く。この第1整地板11の回動に伴って第2整地板12は、第1整地板11に対して角度α'(図面ではα'=約162°)を有して圃場表面Haに接地する。また、第2整地板12の回動に伴って連結ロッド44を介して揺動アーム42が上下方向に回動し、揺動アーム42の回動に応じて連結ワイヤ61が表示部51の左右方向左側に移動して指針アーム53の指針53aが数字の「4」を指し示す。
【0044】
このように、本願発明の耕深表示装置40は、耕深Dの深さに応じて第1整地板11に対して第2整地板12が回動し、この第2整地板12の回動に伴って揺動アーム42が上下方向に回動し、揺動アーム42の回動に応じて連結ワイヤ61が移動して指針53aを移動させる。このため、走行機体90に搭乗した作業者Mが耕深表示装置40の耕深表示部50の指針53aで示された数字を目視で確認することで、正確な耕深を知ることができる。従って、代かき作業中に指針53aが大きな数字側(数字の4側)にずれた場合には、作業者は、耕深が浅くなるように三点リンク連結機構を介して代かき作業機1を持ち上げるための操作をする。また代かき作業中に指針53aが小さい数字側(数字の1側)にずれた場合には、作業者は、耕深が深くなるように三点リンク連結機構を介して代かき作業機1を下方に降ろす操作をする。従って、代かき作業時の耕深を一定にすることができる。
【0045】
また耕深表示装置40の耕深表示部50は、作業者Mが体を代かき作業機側に僅かにひねり又はひねることなく、頭を代かき作業機1に向かって斜め後方側へ振り返るだけで視認可能な位置に配設されているので、耕深の確認を容易に行うことができ、走行機体に搭乗した作業者のハンドル操作がふらつく度合いを小さくすることができる。このため、耕深の確認時における走行機体90の直進性を維持することができる。
【0046】
次に、代かき作業機1によって土寄せ作業を行う場合の耕深表示装置40の作動について、図7を用いて説明する。土寄せ作業を行う場合には、走行機体90の三点リンク連結機構を介して代かき作業機1を持ち上げて、第2整地板12を圃場に対して非接触状態にする。そして、図7に示すように、図5の場合と比較して、揺動アーム42のより下方への回動により、第1整地板11を圃場表面Haに対して角度θよりも大きな角度θ''(図面ではθ''=約70°)を有して傾ける。また第1整地板11の回動に伴って第2整地板12を第1整地板11に対して角度α''(図面ではα''=約180°)を有して傾ける。そして、前述したロック装置の操作レバーの操作によって揺動アーム42をロック状態にして、第2整地板12の進行方向に対する前後方向への回動を規制する。
【0047】
ここで、揺動アーム42の下方への回動にともない、連結ワイヤ61は揺動アーム42側へ移動する。この連結ワイヤ61の移動に伴って、指針アーム53は軸部55を支点として左側へ回動して、指針53aが「土寄せ」を指し示す。代かき作業機1が土寄せ状態になると、走行機体90の三点リンク連結機構を介して代かき作業機1を下げる。そして、走行機体90を前進させると、第1整地板11及び第2整地板12によって圃場の土を走行機体進行方向側へ寄せることができる。
【0048】
なお、前述した実施例では、連結ワイヤ61に張力を附勢する手段として引っ張りばね66を示したが、図8に示すように、ねじりコイルばね67でもよい。このねじりコイルばね67は指針アーム53の下側と表示部51との間の軸部55に挿通された状態で設けられ、ねじりコイルばね67の一方側の腕部67aは表示部51に接続され、他方側の腕部67bは指針アーム53の下側に接続されて、他方側の腕部67bは常に指針アーム53を表示部51の左右方向右側へ附勢している。このため、ねじりコイルばね67の附勢によって指針アーム53に接続された連結ワイヤ61を常に引っ張った状態にすることができる。
【0049】
また、前述した実施形態の耕深表示装置40の表示部51は、数字等が円弧状に配置されたゲージに対して指針53aが移動するものを示したが、図9に示すように、数字等が直線状に配置されたゲージに対して指針が移動するようにしてもよい。この場合、ワイヤ支持部57の走行機体側の側板部58に数字等が表示された表示部52を突出して設ける。表示部52は平面視において矩形状に形成され、側板部58の案内孔から延出するピン65'の下方に配設される。表示部52上には揺動アーム側と反対側から「土寄せ」の文字、及び「1」、「2」、「3」、「4」の数字が記載され、ピン65'が指針となる。
【0050】
このように表示部52を構成すると、前述した表示部51と比較して、構造が簡素化されて、小型化し且つ製造コストを安価にすることができる。なお、連結ワイヤをプッシュプル式のもの(プッシュプルケーブル)にすれば、さらにコンパクト化を図ることができる。
【0051】
また、前述した実施形態の耕深表示装置40は、図7に示すように、耕深に応じて機械的に指針53aを移動させるものを示したが、表示部51に耕深に対応するランプ(図示せず)を設けてもよい。この場合には、ワイヤ支持部57に、連結ワイヤ61の表示部側の端部の位置を検出するセンサ(例えば、リミットスイッチ、光センサ等)と、連結ワイヤ61の端部の位置に対応した耕深を表示するランプとを設け、センサによって検出された連結ワイヤ61の位置に応じた耕深に対応するランプを点灯させる。
【0052】
このように、耕深表示装置70の表示部71に複数のランプを備えて構成することで、機械的に指針53aを移動させる場合と比較して、野外の天候が不順である場合等における視認性を向上させることができる。
【0053】
また、前述した実施形態の代かき作業機1は、図2に示すように、作業機本体2に対して左作業体20L及び右作業体20Rを手動で回動させるものであるが、これらの作業体を電動で回動させるようにしてもよい。この場合には、作業機本体2と左作業体20L及び右作業体20Rとの間に電動式油圧シリンダを設け、このシリンダを伸縮させることで、作業機本体2に対して左作業体20L及び右作業体20Rを回動させる。電動式油圧シリンダの伸縮制御は、作業者が搭乗する走行機体90の運転席の近くに設けられたコントローラによって行われる。
【0054】
また、前述した実施形態では、左作業体20L、右作業体20Rが作業機本体2に対して折り畳み可能な構造の代かき作業機1を例にしたが、左作業体20L、右作業体20Rを無くした代かき作業機でもよい。
【符号の説明】
【0055】
1 代かき作業機
5 機体
10 シールドカバー(カバー部)
11 第1整地板
12 第2整地板
13 耕耘ロータ
40 耕深表示装置
41 リンク機構部
42 揺動アーム
44 連結ロッド
50 耕深表示部
51 表示部
53 指針アーム
61 連結ワイヤ
66 引っ張りばね(附勢手段)
67 ねじりコイルばね(附勢手段)
90 走行機体
【特許請求の範囲】
【請求項1】
走行機体に装着され、機体に回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設されて前記耕耘ロータにより耕耘された耕土を整地する第1整地板と、該第1整地板の後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板とを備える代かき作業機の耕深表示装置であって、
一端側が前記機体に回動自在に接続されて他端側が前記第2整地板に回動自在に接続され、前記耕耘ロータにより耕耘された耕土の耕深に応じた前記第1整地板に対する前記第2整地板の回動に伴って上下方向に回動するリンク機構部と、
前記リンク機構部の回動に応じて耕深を表示する耕深表示部とを有し、
前記耕深表示部は、前記走行機体に搭乗した作業者が前記代かき作業機に向かって斜め後方へ振り返ったときの該作業者の視線の延長先に設けられている
ことを特徴とする代かき作業機の耕深表示装置。
【請求項2】
前記耕深表示部は、機体幅方向の動きによって耕深表示を行う
ことを特徴とする請求項1に記載の代かき作業機の耕深表示装置。
【請求項3】
前記リンク機構部は、一端側が前記機体に回動自在に設けられて他端側が機体進行方向後側に延びて上下方向に揺動可能な揺動アームと、該揺動アームの他端部と前記第2整地板の上面との間に接続された連結ロッドとを有し、
前記耕深表示部は、前記機体に設けられて耕深の複数の異なる程度を示す記号が表示された表示部と、前記揺動アームの回動に応じて前記表示部に表示された複数の記号に沿って移動自在な指針アームとを有し、
一端側が前記揺動アームに回動自在に接続され、他端側が前記指針アームに接続されて、前記揺動アームの揺動にしたがって前記指針アームを移動させる連結ワイヤが設けられている
ことを特徴とする請求項2に記載の代かき作業機の耕深表示装置。
【請求項4】
前記連結ワイヤは、附勢手段によって常に伸長方向に附勢されている
ことを特徴とする請求項3に記載の代かき作業機の耕深表示装置。
【請求項5】
前記指針アームは、その伸長方向の中間部が前記表示部に回動自在に取り付けられて該中間部を支点とし該表示部に沿って回動自在であり、
前記中間部に対する前記指針アームの一端側が前記連結ワイヤに接続され、前記指針アームの他端側が前記表示部に表示された複数の記号に沿って移動自在である
ことを特徴とする請求項3又は4に記載の代かき作業機の耕深表示装置。
【請求項6】
前記指針アームの前記中間部は、該指針アームの他端側と前記中間部との距離が前記指針アームの一端側と前記中間部との距離よりも大きくなる位置に設けられている
ことを特徴とする請求項5に記載の代かき作業機の耕深表示装置。
【請求項1】
走行機体に装着され、機体に回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設されて前記耕耘ロータにより耕耘された耕土を整地する第1整地板と、該第1整地板の後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板とを備える代かき作業機の耕深表示装置であって、
一端側が前記機体に回動自在に接続されて他端側が前記第2整地板に回動自在に接続され、前記耕耘ロータにより耕耘された耕土の耕深に応じた前記第1整地板に対する前記第2整地板の回動に伴って上下方向に回動するリンク機構部と、
前記リンク機構部の回動に応じて耕深を表示する耕深表示部とを有し、
前記耕深表示部は、前記走行機体に搭乗した作業者が前記代かき作業機に向かって斜め後方へ振り返ったときの該作業者の視線の延長先に設けられている
ことを特徴とする代かき作業機の耕深表示装置。
【請求項2】
前記耕深表示部は、機体幅方向の動きによって耕深表示を行う
ことを特徴とする請求項1に記載の代かき作業機の耕深表示装置。
【請求項3】
前記リンク機構部は、一端側が前記機体に回動自在に設けられて他端側が機体進行方向後側に延びて上下方向に揺動可能な揺動アームと、該揺動アームの他端部と前記第2整地板の上面との間に接続された連結ロッドとを有し、
前記耕深表示部は、前記機体に設けられて耕深の複数の異なる程度を示す記号が表示された表示部と、前記揺動アームの回動に応じて前記表示部に表示された複数の記号に沿って移動自在な指針アームとを有し、
一端側が前記揺動アームに回動自在に接続され、他端側が前記指針アームに接続されて、前記揺動アームの揺動にしたがって前記指針アームを移動させる連結ワイヤが設けられている
ことを特徴とする請求項2に記載の代かき作業機の耕深表示装置。
【請求項4】
前記連結ワイヤは、附勢手段によって常に伸長方向に附勢されている
ことを特徴とする請求項3に記載の代かき作業機の耕深表示装置。
【請求項5】
前記指針アームは、その伸長方向の中間部が前記表示部に回動自在に取り付けられて該中間部を支点とし該表示部に沿って回動自在であり、
前記中間部に対する前記指針アームの一端側が前記連結ワイヤに接続され、前記指針アームの他端側が前記表示部に表示された複数の記号に沿って移動自在である
ことを特徴とする請求項3又は4に記載の代かき作業機の耕深表示装置。
【請求項6】
前記指針アームの前記中間部は、該指針アームの他端側と前記中間部との距離が前記指針アームの一端側と前記中間部との距離よりも大きくなる位置に設けられている
ことを特徴とする請求項5に記載の代かき作業機の耕深表示装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−102725(P2013−102725A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−248349(P2011−248349)
【出願日】平成23年11月14日(2011.11.14)
【出願人】(390010836)小橋工業株式会社 (198)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【出願人】(390010836)小橋工業株式会社 (198)
【Fターム(参考)】
[ Back to top ]