
仮想スライドの画質を評価するシステム及び方法
【課題】仮想顕微鏡スライドの画質を評価するためのシステムと方法を提供する。
【解決手段】仮想スライド画像が焦点外れのエリアを有し、よって手動検査の候補であるか否かを決定するために、仮想スライド画像の走査に使用される様々な合焦点を使用して仮想スライド画像の最良適合表面が計算される。次に、最良適合表面から各合焦点までの距離が計算され、最大距離が所定値と比較される。最良適合表面から合焦点までの最大距離が所定値より大きいとき、仮想スライド画像に手動検査及び可能な再走査が必要であることが指摘される。
【解決手段】仮想スライド画像が焦点外れのエリアを有し、よって手動検査の候補であるか否かを決定するために、仮想スライド画像の走査に使用される様々な合焦点を使用して仮想スライド画像の最良適合表面が計算される。次に、最良適合表面から各合焦点までの距離が計算され、最大距離が所定値と比較される。最良適合表面から合焦点までの最大距離が所定値より大きいとき、仮想スライド画像に手動検査及び可能な再走査が必要であることが指摘される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、仮想顕微鏡法の分野に関し、より具体的には、顕微鏡スライド上の試料からの画像データの捕捉前及び捕捉中におけるライン走査カメラの合焦マップに基づく画質評価に関する。
【背景技術】
【0002】
従来の仮想顕微鏡法システムにおいて、画像タイリング技術は、画像の大部分が著しく焦点外れになり得る個々の画像タイルを生成している。画像タイリングシステムは、そのカメラで撮られる個々のスナップショット毎の単一の焦点高さが限定されるために、走査されている対象試料が均一の表面を持たないとき、これらの「視野」のそれぞれは焦点が外れたエリアを有する。仮想顕微鏡法において採用される高倍率レベルでは、均一な表面を有する試料は極めて稀である。さらに、従来の画像タイリングシステムでは、対物レンズを有するエリア走査カメラの使用に内在する円形の光学的歪みが生じる。この円形の歪みは、画像タイルの周辺エリアを焦点外れにする原因となる。
【0003】
従来の画像タイリング解決法は、これらの制限によって非常に不利になり、内在する円形の光学的歪みにとって唯一の頼みは、各画像タイルの周辺上にある焦点外れの画像データを大量に廃棄することである。これにより、結果的に走査しなければならない画像タイルの数は増大し、顕微鏡スライドを走査する時間も付随的に増大する。さらに、焦点外れの周辺画像データが廃棄される場合でも、残りの画像データはやはり、均一な表面の欠如に起因して各画像タイル上の焦点外れのエリアによって害され、かつ円形の光学的歪みによっても害される。
【0004】
近年、仮想顕微鏡法産業に、アペリオテクノロジーズインコーポレイテッド(Aperio Technologies,Inc.)が製造するScanScope(登録商標)スキャナ等の新しいライン走査カメラシステムが導入された。この革命的なScanScope(登録商標)スキャナシステムは、そのライン走査カメラの使用による円形の光学的歪みに害されない。さらに、ライン走査カメラは、顕微鏡スライドを走査する際に捕捉されるピクセルのライン毎に焦点を調整することができ、よって、不均一な表面を追跡することができる。従って、ライン走査カメラシステムからの最終画像の品質は、ライン走査カメラが捕捉する各ピクセルラインのシャープな焦点のために生来的に高い。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願第10/798,457号の明細書。
【特許文献2】米国特許出願第10/827,207号の明細書。
【発明の概要】
【発明が解決しようとする課題】
【0006】
ライン走査カメラにより捕捉される画像データは、客観的には優れているものの、依然として画像捕捉中に発生する可能性のある合焦に関する課題が存在する。例えば、合焦点を識別する前置走査合焦手順は、汚れ、傷、ペンマーク、ラベル又は他の屑等の非組織物質に焦点を合わせる可能性がある。この異物は、カバースリップの上側又はスライドの底面に存在することが多い。これらの場合、測定される前置走査の合焦点と最適焦点高さとの距離がかなり大きくなる可能性がある。従って、これらの前置走査合焦点の近傍にある組織は何れも著しく焦点外れになる可能性がある。
【0007】
さらに、組織試料がガラス上に平らに置かれていない場合(しばしば「折畳まれた」組織と呼ばれる)、単一の焦点高さを用いて、対物レンズの視野(「FOV:Field Of View」)の焦点を合わせることができない。この場合は、前置走査の合焦点を組織の折り畳まれていない部分に合わせることが重要であるが、折り畳まれた組織の量が多くなる程、その対応策はますます困難になる。
【0008】
また、場合によっては、組織試料は前置走査合焦手順が正確な測定を行うのに十分なコントラストを持たないことがある。このような場合には、先に述べたように、前置走査合焦手順は他の物質上に焦点を合わせる可能性がある。幸いにも、この発生尤度は、前置走査の合焦手順により識別される不十分なコントラストを有する合焦点を拒絶するコントラストしきい値を設定することによって、大幅に低減することができる。最後に、顕微鏡スライドは、走査プロセス中に安定的に保持されないことがある。これが発生すれば、走査プロセス中にスライドの高さが変わるかもしれず、そうなれば、前置走査合焦手順において識別される合焦点はもはや有効でなくなる。
【0009】
これらの状態の何れかが発生すれば、最終的な仮想スライド画像の幾つかの部分は焦点外れになるであろう。しかしながら、焦点外れのエリアを有する仮想スライド画像の識別は、手動による各仮想スライド画像の検査を必要とする。これは、極めて費用のかかる、時間浪費的な品質管理上の問題点である。そして、焦点外れの仮想スライド画像が検出されると、操作者は、手動の手順によって仮想スライド画像を走査し直さなければならないが、これもまた時間を浪費する。手動手順では、操作者は、合焦点設置に使用されるスライド上の既知の適正な組織位置を同定する。この後、操作者は、走査に先立ってこれらの点に手動で焦点を合わせるか、適正な合焦点位置を使用してシステムを自動的に進行させる。
【0010】
従って、仮想顕微鏡法産業の発達は、費用のかかる時間浪費的な手動検査プロセスを克服しかつ革命的なライン走査カメラシステムの焦点合わせの能力及び速度を十分に利用する、仮想スライドの画質を評価するための改良されたシステム及び方法に対する必要性をもたらしている。
【課題を解決するための手段】
【0011】
従って、仮想顕微鏡スライドの画質を評価し、かつ焦点外れの部分を有する可能性が高く再走査の必要がある仮想スライド画像を識別する、仮想スライドの画質を評価するためのシステム及び方法について記載する。初めに、仮想スライド画像の走査に使用された合焦点のセットが識別される。これらの合焦点は、仮想スライド画像の最良適合表面を決定するために使用される。次に、任意の合焦点と最良適合表面との間の最大距離が同定され、所定の最大距離値と比較される。最大距離が上記最大距離より大きければ、仮想スライド画像は手動検査を必要としていることが指摘される。
【0012】
若しくは、上記評価は、走査プロセス中にリアルタイムで行われ得る。これは、仮想顕微鏡スライド画像の走査中に捕捉される画像データが全てシャープに焦点を合わされる尤度を増大させかつ時間を浪費する再走査が不必要になる尤度を増大させるために、所定の最大値を超える最良適合表面からの距離を有する合焦点が識別されかつ画像捕捉プロセスに先行して廃棄され、若しくは再較正されることを可能にする。
【0013】
さらに、スライドのセットが自動的に連続走査されるとき、スライドを識別する最終的なグラフ表示を、手動検査が必要な仮想スライド画像を操作者に簡単に明示するようにして提示することができる。これは、操作者に対して、再走査する必要があると考えられる物理的な顕微鏡スライドも識別する。このグラフ表示は、手動検査プロセスが能率化されるように、操作者に、指定されている仮想スライド画像を見るための簡単なアクセスも提供してもよい。またグラフ表示は、再走査プロセスも同じく能率化されるように、操作者に再走査モードへの簡単なアクセスを提供してもよい。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る顕微鏡スライドの一例の平面図を例示するブロック図である。
【図2】本発明の一実施形態に係る、スライドを走査するときの顕微鏡スライドの一例の側面図及び対物レンズ経路を例示するブロック図である。
【図3】本発明の一実施形態に係る、最良適合表面を計算しかつ異常な合焦点を識別するための一例のプロセスを例示するフロー図である。
【図4】本発明の一実施形態に係る、合焦点の一例のセット及び最良適合表面の基準線を例示するグラフ図である。
【図5】本発明の一実施形態に係る、仮想スライドの評価された画質の一例の実験データセットを例示するグラフ図である。
【図6】本発明の一実施形態に係る、顕微鏡スライド又はその一部を走査する間の画質評価のための一例のプロセスを例示するフロー図である。
【図7】本発明の一実施形態に係る、手動検査プロセスを能率化するための一例のディスプレイ表示を例示するブロック図である。
【図8】本明細書に記載されている様々な実施形態に関連して使用され得る一例としてのコンピュータシステムを例示するブロック図である。
【発明を実施するための形態】
【0015】
本発明の構造及び動作の双方に関する詳細な内容は、部分的に、添付の図面を検討することによって探ることができる。諸図を通じて、類似の参照番号は類似の部分を指す。
【0016】
本明細書に開示する所定の実施形態は、仮想スライド画像が何らかの焦点外れエリアを有し、故に手動検査の候補であるかどうかを決定するために、仮想顕微鏡スライドの画質を評価するシステム及び方法を提供する。例えば、本明細書に開示する一方法は、仮想スライド画像の走査に使用される様々な合焦点が仮想スライド画像の最良適合表面の計算に使用されることを可能にする。次に、各合焦点と最良適合表面との距離が計算され、最大距離が所定の値と比較される。合焦点から最良適合表面までの最大距離が上記所定値より大きければ、仮想スライド画像は手動検査及び恐らくは再走査を必要としていることが指摘される。
【0017】
本明細書本文を読めば、当業者には、本発明を様々な代替実施形態及び代替用途に実装する方法が明らかとなるであろう。しかしながら、本明細書では本発明の様々な実施形態が記載されるが、これらの実施形態は限定ではなく単なる例示として提示される点が理解される。従って、様々な代替実施形態のこの詳細な説明は、添付の請求の範囲に記載されている本発明の範囲又は幅を限定するものとして解釈されるべきではない。
【0018】
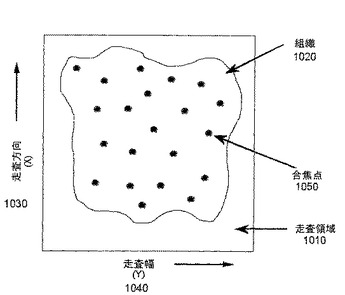
図1は、本発明の一実施形態に係る顕微鏡スライドの一例の平面図を例示するブロック図である。図示した実施形態では、走査エリア1010は、スライド上の組織標本1020より幾分大きい矩形エリアである。前述の特許文献1及び特許文献2に記載されているように、このエリアは、ライン走査カメラを使用して順次ストライプ形状に走査される。走査プロセスは、デカルト座標系を使用して記載することができ、走査方向1030はX座標に割り当てられ、走査幅1040はY座標に割り当てられる。
【0019】
ある実施形態では、前置走査の合焦手順の間に、様々な合焦点1050が手動又は何らかの自動手順の何れかによりスライド上で選択される。これらの合焦点は、その位置における最適焦点高さを同定するために、走査に先行してアクセスされる。これらの最適焦点高さは、走査プロセスの間の顕微鏡対物レンズの焦点合わせを補助するために使用される。図示した実施形態では、各合焦点[1050]はスライド上に1つの位置(X,Y)を有する。
【0020】
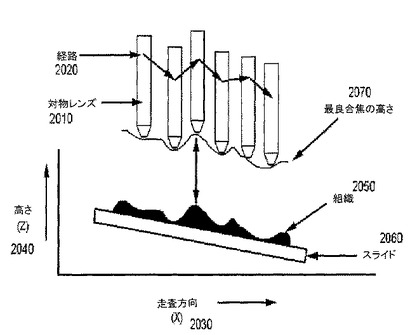
図2は、本発明の一実施形態に係る、スライドを走査するときの顕微鏡スライドの一例の側面図及び対物レンズ経路を例示するブロック図である。図示した実施形態では、X座標に割り当てられた走査方向2030へ経路2020に沿って移動する対物レンズ2010が示されている。これは、スライド2060を静止状態に保持して対物レンズ2010を移動させることにより、又は逆に、対物レンズ2010を静止状態に保持してスライド2060を移動させることにより達成されてもよい。何れの場合も、相対動作及びスライドに対するレンズの経路は同じである。走査中、(Z座標に割り当てられた)対物レンズの高さ2040は、操作プロセスの間、組織2050に焦点が合った状態を保つように調節される。
【0021】
(前述の特許文献2により詳しく述べられている)最良焦点の高さ2070を決定するための手順は、まず対物レンズを各合焦点1050上へ配置し、次にスライド上のその位置に最良焦点をもたらすZ軸上の高さ2040を決定することを含む。この点のセットから焦点面が決定され、対物レンズは、走査プロセスの間中この焦点面を辿る。走査システムはこの焦点合わせを自動的に実行し、ある実施形態では、点は、システムのドリフトを明らかにするために一定の間隔で再度焦点を合わされる。
【0022】
図2に示すように、組織2050は完全に平らではなく、スライド2060はX及びZ軸に対して傾斜される。通常、顕微鏡スライド上の組織試料は薄く(5ミクロン)、これを載せるガラススライドはほぼ平面である。加えて、高倍率の対物レンズ(例えば、20倍)は狭い被写界深度(典型的には、5ミクロン未満)を有する。性能の良いスキャナ上に完璧に準備されたスライドが、スライド面からの焦点高さ5ミクロンのばらつきで走査エリア全体(典型的には、合計面積25mm×75mm)の上に10乃至50ミクロンの傾斜を有することは一般的である。従って、この状況で組織試料に沿った焦点面は、組織の厚さ及び高さの変化を説明する小さい偏移範囲内で実質的に平面になることが予期される。この予期される範囲を超える高さ値を有する合焦点は、その組織が、走査される画像のそのエリアにおいて焦点外れになる可能性があることを示す。効果的には、これらの異常な合焦値(「外れ値」)の識別は、手動検査及び必要であれば再走査をされる可能性のある疑わしい画質を有する仮想スライド画像を識別するための手段を提供する。
【0023】
前置走査合焦値(本明細書では、前置合焦値又は合焦値とも称される)は、3つのデカルト座標(X,Y,Z)によって決定される。各合焦点は、合焦値を有する。走査方向1030の値(X座標)及び走査幅1040の値(Y座標)はスライド上の点を特定し、高さ2040の値(Z座標)は、組織を最適合焦へと至らせる、この位置上の対物レンズの高さを特定する。X、Y及びZ座標は、共同で、前置合焦値を確立する。これらの座標を決定するための代替手順は、前述の特許文献2にさらに詳しく論じられている。概して、このようなN個の合焦点が存在し、ここで、Nは、任意の正数であってもよいが、実際的な目的のためには、1から100までの範囲であることが最も多い。
【0024】
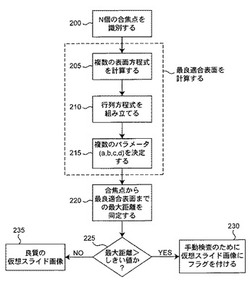
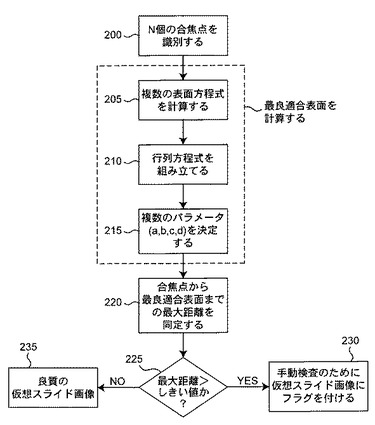
図3は、本発明の一実施形態に係る、最良適合表面を計算しかつ異常な合焦点を識別するための一例のプロセスを例示するフロー図である。まず、ステップ200において、合焦点毎に1つの合焦値を有するN個の合焦点が識別される。仮想スライド画像評価が走査プロセス完了後に行われる実施形態では、合焦点は、例えばデータストレージエリアから検索されてもよく、そうでなければメモリから取得されても、再計算されてもよい。仮想スライド画像評価が(走査中)リアルタイムで行われる実施形態では、合焦点は、メモリ内のある位置から検索されてもよく、若しくはファイルストレージから検索されても、他の方法で取得されてもよい。
【0025】
図示した実施形態では、最良適合表面がステップ205、210及び215で計算される。この最良適合表面は、必ずしも先に述べた焦点面に一致しない。むしろこの最良適合表面は、走査エリア(又は、リアルタイムの実施形態において走査されるべきエリア)に渡って様々な合焦点の平均を表す実質上の平面である。ある実施形態では、最良適合表面は、最小二乗法を使用して様々な合焦点から計算され得る。他の実施形態では、最良適合表面は、他の方法を使用して計算され得る。
【0026】
最良適合表面が平面である単純な実施形態では、この最良適合表面は3つのパラメータ(a,b,c)によって特定されてもよい。従って、最良適合表面上に存在する全ての点(X,Y,Z)は、以下の表面方程式を満足する。
【0027】
[数1]
a+bX+xY=Z
【0028】
ステップ205では、表面方程式が各合焦値に適用される。様々な合焦値には、1からNまでの番号を付けることができ、i番目の値は(Xi,Yi,Zi)で示される。方程式のこのセットは、ステップ210で組み立てられる行列方程式を含む。数学的には、この行列方程式を下記のように表すことができる。
【0029】
【数1】

【0030】
上記行列方程式における省略記号は、行列表示における反復パターンを示す。N=3であれば、行列は3×3であり、これは、3つの点が一平面を一意に決定するという事実によって正確な解を得ることができる。実際には、Nは3より遙かに大きい。ステップ215では、パラメータ(a,b,c)が、例えば標準的な最小二乗法を使用して決定される。これらのパラメータは、行列方程式に関する最良適合表面の最終的な計算を可能にする。最小二乗解を求めるためには、ガウスの消去法、又は例えばコレスキー因数分解等のその派生方法の1つを含む様々な既知の技術が存在する。若しくは、最小二乗解は、一般化逆数による特異値分解を使用して直接計算することができる。これらの解の方法は、行列線形代数分野における当業者の誰にも周知である。
【0031】
他の実施形態では、平面以外の最良適合表面が使用されてもよい。例えば、ガラススライドが平らでなく、幾分かの曲率又は曲りを有するとすれば、放物面が効果的であろう。多項式表現を使用すれば、放物面の方程式は、以下のように表すことができる。
【0032】
[数2]
a+bX+cY+dXX+eYY+fXY=Z
【0033】
この方程式には、6つのパラメータ(a,b,c,d,e,f)が存在する。従って、対応する行列方程式は6つの列を有することになり、下記のように表される。
【0034】
【数2】
【0035】
上記行列の定式化は、任意の表面に拡大することができ、その結果、行列方程式はその表面の記載に必要な数のパラメータ及び列を有するであろう。行列方程式が一旦このようにして生成されると、パラメータは、表面の複雑さに関わりなく、同じ最小二乗解法を使用して求められる。当業者であれば、行列の定式化を平面又は放物面より複雑な表面に適用し得る方法を理解するであろう。
【0036】
ステップ220では、最良適合表面からの各合焦点の距離が、以下の方程式を使用して、合焦点Zの値(Zi)から最良適合表面の値Zを減算することにより計算される。
【0037】
[数2]
Di=Zi−a−bXi−cYi
【0038】
最良適合表面の任意の傾斜が除去されると、各合焦点の調節されたZ値はゼロに近い小さい範囲に密集される。次に、任意の合焦点の最良適合表面からの最大距離の値が同定される。この最大距離の値を、Dmaxという。
【0039】
次に、Dmax値は所定のしきい値と比較され、Dmax値がしきい値を超えているかどうかが確認される。ステップ225における決定により、Dmaxがしきい値を超えていれば外れ値が検出されていることになり、仮想スライド画像は、ステップ230において疑わしい画質を有しかつ手動検査が必要であるとしてフラグを付けられる。ステップ225において決定されるように、Dmaxがしきい値より少なければ外れ値は検出されず、仮想スライド画像は、ステップ235に示すように、良好な画質を有するとして分類される。ある実施形態では、しきい値として妥当な値は5ミクロンであるが、しきい値は、任意の値に設定されることによって、例えば画質の悪い仮想スライド画像の識別を最適化し得る。例えば、ある代替実施形態では、しきい値を10ミクロンに設定され得る。
【0040】
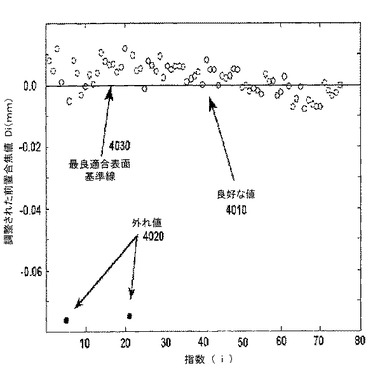
図4は、本発明の一実施形態に係る、合焦点の一例のセット及び最良適合表面の基準線を例示するグラフ図である。図示された実施形態において、低い合焦品質を有する仮想スライド画像の様々な合焦点に関して、調節された合焦値4010及び4020が示されている。この仮想スライド画像に関しては、合計74個の合焦点が示されている。良好な合焦値は、白丸4010で示されている。外れ合焦値は、グラフ下部で容易に認められ、黒丸4020として示されている。調節された合焦値0.0を有する合焦点は、最良適合表面の基準線4030の真上に存在する。図示されたグラフに見られるように、良好な合焦値を有する合焦点は基準線の近傍に密集し、外れ値は基準線から遠く離れて存在する。効果的には、外れ値は何れも容易に識別することができ、この特定の仮想スライド画像は疑わしいとして分類され、手動検査を必要とすることにより、それが画質の悪さにより再走査されなければならないかどうかが決定されるであろう。
【0041】
図5は、本発明の一実施形態に係る、仮想スライドの評価された画質の実験データの一例のセットを例示するグラフ図である。先に論じたように、ある実施形態では、しきい値は5ミクロンであってもよい。効果的には、しきい値は経験的に決定され、立証され得る。これは、89個の仮想スライド画像のセットで実行され、その結果は図5に示されている。図示した例では、各画像は、視覚的に検査され、善し悪しが分類された。次に、外れ値検出手順を使用して、各画像に関する調整されたZの最大値(Dmax)が求められた。また、各画像の調整されたZの値の統計も調べられて分布の標準偏差を決定したが、これはしきい値の決定に不可欠のものではない。
【0042】
図示した例では、良好な画像5010は星の記号で示され、不良な画像5020は四角で示されている。基準線5030は5ミクロンの位置に示され、不良な画像と良好な画像とを明確に分けている。従って、しきい値を5ミクロンに設定することにより、外れ値検出手順は、不良な画像を全く見逃すことがなかった。即ち、感度(sensitivity)1.0である。より重要なことに、しきい値を超える30画像のうちの28画像は実際に低質である。即ち、特異度(specificity)は28/30=0.93である。従って、良好な画像であって手動検査の必要ありとして同定されたものは僅かに2つであった。これは、スキャナの操作者は疑いのある画像を識別し、手動検査をこれらの画像にのみ制限するためにこの外れ値検出手順を自信をもって使用することができることを意味する。これにより、良好な合焦品質に関して検査する必要のある画像の数は大幅に減少する。
【0043】
図6は、本発明の一実施形態に係る、顕微鏡スライド又はその一部を走査する間に画質を評価するための一例のプロセスを例示するフロー図である。図示したリアルタイム評価プロセスは、走査後の画像評価プロセスの代わりに使用することができ、また、画質を向上させかつ手動検査される仮想スライド画像の数を減らすために、走査後の画像評価プロセスと組み合わせても使用することができる。リアルタイム評価プロセスの1つの優位点は、外れ値として識別される合焦点を焦点面から排除し得ることにある。これらの外れ合焦点は、低い合焦品質の主たる原因であることから、これらを使用前に排除すれば、スキャナにより生成される良好な品質の画像の割合は上がる。さらに、前置走査合焦手順は外れ値検出手順によって増強されることがあり、例えば、走査システムは、外れ値として識別されて排除された任意の合焦点に近い新たな合焦点を識別することができるようになる。
【0044】
まず、プロセスは、ステップ600において組織標本を顕微鏡スライド上へ配置することによって始まり、次に、ステップ605に示すように、組織標本上の様々な位置に合焦点が設けられる。次に、ステップ610において、走査システムは様々な合焦点の合焦値を取得し、次いでステップ615において、最良適合表面が計算される。この時点で、外れ値検出手順がステップ620で採用され、合焦点の何れかが外れ値であるか否かを決定する。外れ値が存在すれば、これらの合焦点はステップ625において、例えば外れ値を合焦点のセットから除去することによって、若しくは、位置を僅かに変えて、その合焦点の新しい位置の合焦値を再度捕捉することによって修正される。例えば、合焦点を僅かに移動させると、合焦値が誤って読み取られる原因となったペンマーク又は他のマーキングが排除されることもある。
【0045】
さらに、ステップ625では、任意選択として、外れ値が最初に検出されたことを示すフラグをセットすることができる。これにより、効果的には、仮想スライド画像に、捕捉される仮想スライド画像の全体的な品質を向上させるために手動検査を必要とするものとしてフラグを付けることができる。若しくは、外れ値合焦点が除去されて外れ値でない合焦点と置換されれば、フラグはセットされなくてよい。効果的には、外れ値合焦点を非外れ値合焦点で置換すれば、手動検査を必要とする仮想スライド画像の合計数を減じることができる。
【0046】
外れ値合焦点の修正後、若しくは、外れ値合焦点が存在しなければ、ステップ630において仮想スライドが走査される。この時点で、代替実施形態では、ステップ605から630までが(インタリーブされる)仮想スライド画像捕捉プロセスの一部として捕捉される個々のストライプについて繰り返し行われてもよく、若しくはこれらのステップは、仮想スライド画像捕捉のプロセス全体の前に一度だけ行われてもよい点に留意することが重要である。
【0047】
走査プロセスの完了後、ステップ635において決定されるように、任意選択である外れ値フラグがセットされていれば、仮想スライド画像は、ステップ645に示すように手動検査を指定されてもよい。若しくは、外れ値フラグの存在は、走査システムの統計的追跡のために認識されるだけであってもよい。ステップ635において決定されるように、外れ値が検出されなければ、若しくは、フラグがセットされていても、単なる統計的追跡目的であれば、ステップ640に示すように、仮想スライド画像は良好な品質を有するものとして分類される。
【0048】
合焦点を既に修正している、若しくは排除している仮想スライド画像の手動検査を指定することの利点の1つは、向上された品質管理である。外れ点は使用されていない、又は修正されて、修正された合焦点は外れ値でなくなっていることから、効果的には、最終的な仮想スライド画像は、初期には外れ値が検出されていたとしても、検査時には良好な品質であるというより高い可能性を有する。これは、手動検査は引き続き実行されるが、再走査が必要となる可能性は少なく、これにより、追加的な時間の節約がもたらされると共に、品質管理が向上することを意味する。
【0049】
図7は、本発明の一実施形態に係る、手動検査プロセスを能率化するための一例のディスプレイ表示を例示するブロック図である。図示された実施形態において、捕捉された10個の仮想スライド画像のセットが、例えばコンピュータデバイスのディスプレイ画面で操作者に提示される。ある実施形態では、ディスプレイ画面は走査デバイスのコンソールであってもよい。スキャナの操作者を補助するために、画質結果は視覚表示で示され得る。例えば、図示された実施形態では、走査されたスライドを表示する一連の矩形が、手動検査を必要とする仮想スライド画像を識別する文字を刻まれて示されている。若しくは、グラフィックインジケータ又は色コードインジケータが使用されてもよい。
【0050】
仮想スライド画像7010のように良好な画像として分類されている仮想スライド画像については、操作者は手動検査を行う必要がない。仮想スライド画像7020のように手動検査が必要であるとしてフラグを付けられている仮想スライド画像については、操作者は、例えば疑わしい仮想スライド画像を表す矩形をクリックすることによって、手動検査を効率的に行ってもよい。効果的には、これにより、結果的に実際の仮想スライド画像が同じディスプレイ画面に表示されるようなビューイングアプリケーションが実行されてもよい。
【0051】
ある実施形態では、外れ値が検出されると、外れ値の合焦点の座標を捕捉することができ、次に、疑わしい仮想スライド画像が手動検査を要するとして操作者に表示されたとき、疑わしい特定のエリアがまず操作者に表示されて検査プロセスをさらに能率化してもよい。若しくは、識別された外れ値合焦点を包囲する領域が仮想スライド画像上のオーバーレイによって略示されてもよく、若しくはそうでなければ強調表示又は同定されて仮想スライド画像の迅速な手動検査を促進してもよい。当然ながら、操作者は、仮想スライド画像全体をパン及びズームして品質を検査し、画質が良いか否か、若しくはスライドの再走査が必要であるか否かを決定することもできるであろう。
【0052】
効果的には、操作者は、手動検査が必要であるとして識別された仮想スライド画像を手動で検査するだけでよい。操作者は、一瞥して容易に検査すべき画像が存在するかどうかを理解し、直接これらの画像について視覚検査をすることができる。これは、何れかの画像がさらなる検査を要するかどうかを即座に認識することによって、操作者の時間を節約し、プロセス全体をより効率的なものにする。さらに、再走査プロセスもまた能率化されるように、グラフ表示が操作者に再走査モードへの簡易なアクセスを提供してもよい。
【0053】
図8は、本明細書に記載されている様々な実施形態に関連して使用され得る一例としてのコンピュータシステム550を例示するブロック図である。例えば、コンピュータシステム550は、数例を挙げるだけでも、画像取込みデバイス、画像プロセッサデバイス又は画像サーバデバイスと併せて使用されてもよい。当業者には明白であるように、他のコンピュータシステム及び/又はアーキテクチャが使用されてもよい。
【0054】
コンピュータシステム550は、好適には、プロセッサ552等の1つ以上のプロセッサを含む。さらに、入/出力を管理する補助プロセッサ、浮動小数点数学演算を実行する補助プロセッサ、信号処理アルゴリズムの高速実行に適したアーキテクチャを有する専用マイクロプロセッサ(例えば、デジタル信号プロセッサ)、主処理システムに従属するスレーブプロセッサ(例えば、バックエンドプロセッサ)、デュアル又はマルチプロセッサシステム用の追加のマイクロプロセッサ又はコントローラ、若しくはコプロセッサ等の追加のプロセッサが提供されてもよい。このような補助プロセッサは、離散プロセッサであっても、プロセッサ552と統合されてもよい。
【0055】
プロセッサ552は、好適には、通信バス554へ接続される。通信バス554は、コンピュータシステム550のストレージと他の周辺コンポーネントとの間の情報転送を促進するためのデータチャネルを含んでもよい。通信バス554はさらに、データバス、アドレスバス及び制御バス(図示されていない)を含む、プロセッサ552との連絡に使用される信号のセットを提供してもよい。通信バス554は、例えば業界標準アーキテクチャ(「ISA:Industry Standard Architecture」)、拡張業界標準アーキテクチャ(「EISA:Extended Industry Standard Architecture」)、マイクロチャネルアーキテクチャ(「MCA」)、周辺コンポーネント相互接続(「PCI:Peripheral Component Interconnect」)ローカルバス、又は電気電子学会(「IEEE:Institute of
Electrical and Electronics Engineers」)が普及している、IEEE488汎用インタフェースバス(「GPIB:General-Purpose Interface Bus」)、IEEE696/S−100及び等を含む規格に準拠するバスアーキテクチャ等である任意の標準又は非標準バスアーキテクチャを備えてもよい。
【0056】
コンピュータシステム550は、好適には、主メモリ556を含み、かつ二次メモリ558を含んでもよい。主メモリ556は、プロセッサ552上で実行するプログラムのための命令及びデータのストレージを供給する。主メモリ556は、典型的には、ダイナミックランダムアクセスメモリ(「DRAM」)及び/又はスタティックランダムアクセスメモリ(「SRAM」)等の半導体ベースのメモリである。他の半導体ベースのメモリのタイプとしては、例えば、読取り専用メモリ(「ROM:Read Only Memory」)を含む、同期ダイナミックランダムアクセスメモリ(「SDRAM:Synchronous Dynamic Random Access Memory」)、ラムバスダイナミックランダムアクセスメモリ(「RDRAM:Rambus Dynamic Random Access Memory」)、強誘電ランダムアクセスメモリ(「FRAM:Ferroelectric Random
Access Memory」)等が含まれる。
【0057】
二次メモリ558は、任意選択として、ハードディスクドライブ560及び/又は、例えばフロッピー(登録商標)ディスクドライブ、磁気テープドライブ、コンパクトディスク(「CD」)ドライブ、デジタルバーサタイルディスク(「DVD」)ドライブ等のリムーバブルストレージドライブ562を含んでもよい。リムーバブルストレージドライブ562は、リムーバブルストレージメディア564との間で周知方法により読取り及び/又は書込みを行なう。リムーバブルストレージメディア564は、例えば、フロッピー(登録商標)ディスク、磁気テープ、CD、DVD等であってもよい。
【0058】
リムーバブルストレージメディア564は、好適には、コンピュータ実行可能コード(即ち、ソフトウェア)及び/又はデータを格納しているコンピュータ読取り可能メディアである。リムーバブルストレージメディア564に格納されたコンピュータソフトウェア又はデータは、電気通信信号578としてコンピュータシステム550へ読み込まれる。
【0059】
代替実施形態では、二次メモリ558は、コンピュータプログラム又は他のデータ又は命令をコンピュータシステム550へロードできるようにする他の類似手段を含んでもよい。このような手段としては、例えば、外部ストレージメディア572及びインタフェース570が含まれてもよい。外部ストレージメディア572の例としては、外部ハードディスクドライブ又は外部光ドライブ及び/又は外部磁気光学ドライブが含まれてもよい。
【0060】
二次メモリ558の他の例としては、プログラム可能読取り専用メモリ(「PROM:Programmable Read-Only Memory」)、消去可能なプログラム可能読取り専用メモリ(「EPROM:Erasable Programmable Read-Only Memory」)、電気的に消去可能な読取り専用メモリ(「EEPROM:Electrically
Erasable Read-Only Memory」)又はフラッシュメモリ(EEPROMに類似するブロック指向のメモリ)等の半導体ベースのメモリが含まれてもよい。また、ソフトウェア及びデータをリムーバブルストレージユニット572からコンピュータシステム550へ転送できるようにする他の任意のリムーバブルストレージユニット572及びインタフェース570も含まれる。
【0061】
またコンピュータシステム550は、通信インタフェース574を含んでもよい。通信インタフェース574は、ソフトウェア及びデータがコンピュータシステム550と、外部デバイス(例えば、プリンタ)、ネットワーク又は情報ソースとの間で転送できるようにする。例えば、コンピュータソフトウェア又は実行可能コードは、ネットワークサーバから通信インタフェース574を介してコンピュータシステム550へ転送されてもよい。通信インタフェース574の例としては、数例を挙げるだけでも、モデム、ネットワークインタフェースカード(「NIC」)、通信ポート、PCMCIAスロット及びカード、赤外線インタフェース及びIEEE1394ファイアワイヤが含まれる。
【0062】
通信インタフェース574は、好適には、イーサネット(登録商標)IEEE802規格、ファイバチャネル、デジタル加入者線(「DSL:Digital Subscriber Line」)、非同期デジタル加入者線(「ADSL:Asynchronous Digital Subscriber Line」)、フレームリレー、非同期転送モード(「ATM:Asynchronous Transfer
Mode」)、統合デジタルサービス網(「ISDN:Integrated Digital Services Network」)、パーソナル通信サービス(「PCS:Personal Communications
Services」)、通信制御プロトコル/インターネットプロトコル(「TCP/IP:Transmission Control Protocol/Internet Protocol」)、シリアルラインインターネットプロトコル/ポイントツーポイントプロトコル(「SLIP/PPP」)等々のような業界が公布するプロトコル標準を実装するが、カスタマイズされた、若しくは非標準インタフェースプロトコルも同様に実装されてもよい。
【0063】
通信インタフェース574を介して転送されるソフトウェア及びデータは、概して、電気通信信号578の形式である。これらの信号578は、好適には、通信チャネル576を介して通信インタフェース574へ供給される。通信チャネル576は信号578を伝送し、かつ、数例を挙げるだけでも電信線又はケーブル、光ファイバ、従来の電話線、携帯電話リンク、無線データ通信リンク、高周波(RF)リンク又は赤外線リンクを含む様々な有線、又は無線通信手段を使用して実装されてもよい。
【0064】
コンピュータ実行可能コード(即ち、コンピュータプログラム又はソフトウェア)は、主メモリ556及び/又は二次メモリ558に格納される。コンピュータプログラムは、また通信インタフェース574を介して受信され、主メモリ556及び/又は二次メモリ558に格納されることもできる。このようなコンピュータプログラムは、実行されると、コンピュータシステム550が先に述べたような本発明の様々な機能を実行することを可能にする。
【0065】
この明細書本文における「コンピュータ読取り可能メディア」という表現は、コンピュータ実行可能コード(例えば、ソフトウェア及びコンピュータプログラム)をコンピュータシステム550へ提供するために使用される任意のメディアを指して使用される。これらのメディアの例としては、主メモリ556、二次メモリ558(ハードディスクドライブ560、リムーバブルストレージメディア564及び外部ストレージメディア572を含む)、及び通信インタフェース574と通信により結合される任意の周辺デバイス(ネットワーク情報サーバ又は他のネットワークデバイスを含む)が含まれる。これらのコンピュータ読取り可能メディアは、コンピュータシステム550へ実行可能コード、プログラミング命令及びソフトウェアを提供するための手段である。
【0066】
ソフトウェアを使用して実装される一実施形態では、ソフトウェアはコンピュータ読取り可能メディア上へ格納され、かつリムーバブルストレージドライブ562、インタフェース570又は通信インタフェース574によってコンピュータシステム550へロードされてもよい。このような実施形態では、ソフトウェアは、コンピュータシステム550へ電気通信信号578の形式でロードされる。ソフトウェアは、プロセッサ552によって実行されると、好適には、プロセッサ552に本明細書で先に述べた発明的特徴及び機能を実行させる。
【0067】
また主としてハードウェアにおいては、例えば特定用途向け集積回路(「ASIC:Application Specific Integrated Circuit」)又はフィールドプログラマブルゲートアレイ(「FPGA」)等のコンポーネントを使用して、様々な実施形態が実装されてもよい。本明細書に記載された機能を実行することのできるハードウェア状態マシンの実装も、当業者には明らかであろう。また様々な実施形態は、ハードウェア及びソフトウェア双方の組み合わせを使用して実装されてもよい。
【0068】
さらに、当業者は、上述の諸図面及び本明細書に開示されている実施形態に関連して記載された例示的な様々な論理ブロック、モジュール、回路及び方法ステップが、しばしば電子ハードウェア、コンピュータソフトウェア又は両者の組み合わせとして実装され得ることを評価するであろう。以上、ハードウェアとソフトウェアのこの互換性を明確に例示するために、様々な例示的コンポーネント、ブロック、モジュール、回路及びステップを概してその機能性に関連して記載した。このような機能性がハードウェア又はソフトウェアとして実装されるかどうかは、全体システムに課される特定の用途及び設計上の制約に依存する。当業者は、記載された機能性を特定の各用途に合わせて様々に実装することができるが、このような実装の決定は、本発明の範囲からの逸脱を招くものとして解釈されるべきではない。さらに、機能をモジュール、ブロック、回路又はステップにまとめることは、説明を簡便にするためのものである。特定の機能又はステップは、本発明から逸脱することなく1つのモジュール、ブロック又は回路からもう1つのものへ移動させることができる。
【0069】
さらに、本明細書に開示されている実施形態に関連して記載された様々な例示的な論理ブロック、モジュール及び方法は、汎用プロセッサ、デジタル信号プロセッサ(「DSP:Digital Signal Processor」)、ASIC、FPGA又は他のプログラム可能論理デバイス、離散ゲート又はトランジスタ論理、離散型ハードウェアコンポーネント又は本明細書に記載されている機能を実行するように設計されるこれらの任意の組み合わせによって実装又は実行されてもよい。汎用プロセッサはマイクロプロセッサであってもよいが、代替例では、プロセッサは任意のプロセッサ、コントローラ、マイクロコントローラ又は状態マシンであってもよい。プロセッサは計算デバイスの組み合わせとして、例えば、DSPとマイクロプロセッサの組み合わせ、複数のマイクロプロセッサ、DSPコアと併用する1つ以上のマイクロプロセッサ又は他の任意のこのような構成として実装されてもよい。
【0070】
さらに、本明細書に開示されている実施形態に関連して述べた方法のステップ又はアルゴリズムは、ハードウェア、プロセッサにより直接実行されるソフトウェアモジュール又は両者の組み合わせの形で具現され得る。ソフトウェアモジュールは、RAMメモリ、フラッシュメモリ、ROMメモリ、EPROMメモリ、EEPROMメモリ、レジスタ、ハードディスク、リムーバブルディスク、CD−ROM又はネットワークストレージメディアを含む他の任意の形式のストレージメディア内に存在し得る。一例としてのストレージメディアは、プロセッサがストレージメディアとの間で情報の読取り及び書込みを行えるようにプロセッサへ結合され得る。上記代替例では、ストレージメディアはプロセッサに統合され得る。また、プロセッサ及びストレージメディアは、また、ASIC内に存在し得る。
【0071】
開示した実施形態に関する上述の説明は、任意の当業者が本発明を利用できるように提供される。当業者には、これらの実施形態に対する様々な修正が直ちに明らかとなり、本明細書に記載された一般原理は、本発明の精神及び範囲を逸脱することなく他の実施形態に適用できる。従って、本明細書に提示されている説明及び図面は、本発明の現時点での好適な実施形態を表し、よって、本発明により広範に企図されている発明対象を表すものである点は理解されるべきである。さらに、本発明の範囲は、当業者にとって自明となる可能性のある他の実施形態を完全に包含すること、よって、本発明の範囲は唯一、添付の請求の範囲によってのみ限定されることも理解される。
【符号の説明】
【0072】
1010 走査エリア
1020 組織標本
1030 走査方向
1040 走査幅
1050 合焦点
【技術分野】
【0001】
本発明は、仮想顕微鏡法の分野に関し、より具体的には、顕微鏡スライド上の試料からの画像データの捕捉前及び捕捉中におけるライン走査カメラの合焦マップに基づく画質評価に関する。
【背景技術】
【0002】
従来の仮想顕微鏡法システムにおいて、画像タイリング技術は、画像の大部分が著しく焦点外れになり得る個々の画像タイルを生成している。画像タイリングシステムは、そのカメラで撮られる個々のスナップショット毎の単一の焦点高さが限定されるために、走査されている対象試料が均一の表面を持たないとき、これらの「視野」のそれぞれは焦点が外れたエリアを有する。仮想顕微鏡法において採用される高倍率レベルでは、均一な表面を有する試料は極めて稀である。さらに、従来の画像タイリングシステムでは、対物レンズを有するエリア走査カメラの使用に内在する円形の光学的歪みが生じる。この円形の歪みは、画像タイルの周辺エリアを焦点外れにする原因となる。
【0003】
従来の画像タイリング解決法は、これらの制限によって非常に不利になり、内在する円形の光学的歪みにとって唯一の頼みは、各画像タイルの周辺上にある焦点外れの画像データを大量に廃棄することである。これにより、結果的に走査しなければならない画像タイルの数は増大し、顕微鏡スライドを走査する時間も付随的に増大する。さらに、焦点外れの周辺画像データが廃棄される場合でも、残りの画像データはやはり、均一な表面の欠如に起因して各画像タイル上の焦点外れのエリアによって害され、かつ円形の光学的歪みによっても害される。
【0004】
近年、仮想顕微鏡法産業に、アペリオテクノロジーズインコーポレイテッド(Aperio Technologies,Inc.)が製造するScanScope(登録商標)スキャナ等の新しいライン走査カメラシステムが導入された。この革命的なScanScope(登録商標)スキャナシステムは、そのライン走査カメラの使用による円形の光学的歪みに害されない。さらに、ライン走査カメラは、顕微鏡スライドを走査する際に捕捉されるピクセルのライン毎に焦点を調整することができ、よって、不均一な表面を追跡することができる。従って、ライン走査カメラシステムからの最終画像の品質は、ライン走査カメラが捕捉する各ピクセルラインのシャープな焦点のために生来的に高い。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願第10/798,457号の明細書。
【特許文献2】米国特許出願第10/827,207号の明細書。
【発明の概要】
【発明が解決しようとする課題】
【0006】
ライン走査カメラにより捕捉される画像データは、客観的には優れているものの、依然として画像捕捉中に発生する可能性のある合焦に関する課題が存在する。例えば、合焦点を識別する前置走査合焦手順は、汚れ、傷、ペンマーク、ラベル又は他の屑等の非組織物質に焦点を合わせる可能性がある。この異物は、カバースリップの上側又はスライドの底面に存在することが多い。これらの場合、測定される前置走査の合焦点と最適焦点高さとの距離がかなり大きくなる可能性がある。従って、これらの前置走査合焦点の近傍にある組織は何れも著しく焦点外れになる可能性がある。
【0007】
さらに、組織試料がガラス上に平らに置かれていない場合(しばしば「折畳まれた」組織と呼ばれる)、単一の焦点高さを用いて、対物レンズの視野(「FOV:Field Of View」)の焦点を合わせることができない。この場合は、前置走査の合焦点を組織の折り畳まれていない部分に合わせることが重要であるが、折り畳まれた組織の量が多くなる程、その対応策はますます困難になる。
【0008】
また、場合によっては、組織試料は前置走査合焦手順が正確な測定を行うのに十分なコントラストを持たないことがある。このような場合には、先に述べたように、前置走査合焦手順は他の物質上に焦点を合わせる可能性がある。幸いにも、この発生尤度は、前置走査の合焦手順により識別される不十分なコントラストを有する合焦点を拒絶するコントラストしきい値を設定することによって、大幅に低減することができる。最後に、顕微鏡スライドは、走査プロセス中に安定的に保持されないことがある。これが発生すれば、走査プロセス中にスライドの高さが変わるかもしれず、そうなれば、前置走査合焦手順において識別される合焦点はもはや有効でなくなる。
【0009】
これらの状態の何れかが発生すれば、最終的な仮想スライド画像の幾つかの部分は焦点外れになるであろう。しかしながら、焦点外れのエリアを有する仮想スライド画像の識別は、手動による各仮想スライド画像の検査を必要とする。これは、極めて費用のかかる、時間浪費的な品質管理上の問題点である。そして、焦点外れの仮想スライド画像が検出されると、操作者は、手動の手順によって仮想スライド画像を走査し直さなければならないが、これもまた時間を浪費する。手動手順では、操作者は、合焦点設置に使用されるスライド上の既知の適正な組織位置を同定する。この後、操作者は、走査に先立ってこれらの点に手動で焦点を合わせるか、適正な合焦点位置を使用してシステムを自動的に進行させる。
【0010】
従って、仮想顕微鏡法産業の発達は、費用のかかる時間浪費的な手動検査プロセスを克服しかつ革命的なライン走査カメラシステムの焦点合わせの能力及び速度を十分に利用する、仮想スライドの画質を評価するための改良されたシステム及び方法に対する必要性をもたらしている。
【課題を解決するための手段】
【0011】
従って、仮想顕微鏡スライドの画質を評価し、かつ焦点外れの部分を有する可能性が高く再走査の必要がある仮想スライド画像を識別する、仮想スライドの画質を評価するためのシステム及び方法について記載する。初めに、仮想スライド画像の走査に使用された合焦点のセットが識別される。これらの合焦点は、仮想スライド画像の最良適合表面を決定するために使用される。次に、任意の合焦点と最良適合表面との間の最大距離が同定され、所定の最大距離値と比較される。最大距離が上記最大距離より大きければ、仮想スライド画像は手動検査を必要としていることが指摘される。
【0012】
若しくは、上記評価は、走査プロセス中にリアルタイムで行われ得る。これは、仮想顕微鏡スライド画像の走査中に捕捉される画像データが全てシャープに焦点を合わされる尤度を増大させかつ時間を浪費する再走査が不必要になる尤度を増大させるために、所定の最大値を超える最良適合表面からの距離を有する合焦点が識別されかつ画像捕捉プロセスに先行して廃棄され、若しくは再較正されることを可能にする。
【0013】
さらに、スライドのセットが自動的に連続走査されるとき、スライドを識別する最終的なグラフ表示を、手動検査が必要な仮想スライド画像を操作者に簡単に明示するようにして提示することができる。これは、操作者に対して、再走査する必要があると考えられる物理的な顕微鏡スライドも識別する。このグラフ表示は、手動検査プロセスが能率化されるように、操作者に、指定されている仮想スライド画像を見るための簡単なアクセスも提供してもよい。またグラフ表示は、再走査プロセスも同じく能率化されるように、操作者に再走査モードへの簡単なアクセスを提供してもよい。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る顕微鏡スライドの一例の平面図を例示するブロック図である。
【図2】本発明の一実施形態に係る、スライドを走査するときの顕微鏡スライドの一例の側面図及び対物レンズ経路を例示するブロック図である。
【図3】本発明の一実施形態に係る、最良適合表面を計算しかつ異常な合焦点を識別するための一例のプロセスを例示するフロー図である。
【図4】本発明の一実施形態に係る、合焦点の一例のセット及び最良適合表面の基準線を例示するグラフ図である。
【図5】本発明の一実施形態に係る、仮想スライドの評価された画質の一例の実験データセットを例示するグラフ図である。
【図6】本発明の一実施形態に係る、顕微鏡スライド又はその一部を走査する間の画質評価のための一例のプロセスを例示するフロー図である。
【図7】本発明の一実施形態に係る、手動検査プロセスを能率化するための一例のディスプレイ表示を例示するブロック図である。
【図8】本明細書に記載されている様々な実施形態に関連して使用され得る一例としてのコンピュータシステムを例示するブロック図である。
【発明を実施するための形態】
【0015】
本発明の構造及び動作の双方に関する詳細な内容は、部分的に、添付の図面を検討することによって探ることができる。諸図を通じて、類似の参照番号は類似の部分を指す。
【0016】
本明細書に開示する所定の実施形態は、仮想スライド画像が何らかの焦点外れエリアを有し、故に手動検査の候補であるかどうかを決定するために、仮想顕微鏡スライドの画質を評価するシステム及び方法を提供する。例えば、本明細書に開示する一方法は、仮想スライド画像の走査に使用される様々な合焦点が仮想スライド画像の最良適合表面の計算に使用されることを可能にする。次に、各合焦点と最良適合表面との距離が計算され、最大距離が所定の値と比較される。合焦点から最良適合表面までの最大距離が上記所定値より大きければ、仮想スライド画像は手動検査及び恐らくは再走査を必要としていることが指摘される。
【0017】
本明細書本文を読めば、当業者には、本発明を様々な代替実施形態及び代替用途に実装する方法が明らかとなるであろう。しかしながら、本明細書では本発明の様々な実施形態が記載されるが、これらの実施形態は限定ではなく単なる例示として提示される点が理解される。従って、様々な代替実施形態のこの詳細な説明は、添付の請求の範囲に記載されている本発明の範囲又は幅を限定するものとして解釈されるべきではない。
【0018】
図1は、本発明の一実施形態に係る顕微鏡スライドの一例の平面図を例示するブロック図である。図示した実施形態では、走査エリア1010は、スライド上の組織標本1020より幾分大きい矩形エリアである。前述の特許文献1及び特許文献2に記載されているように、このエリアは、ライン走査カメラを使用して順次ストライプ形状に走査される。走査プロセスは、デカルト座標系を使用して記載することができ、走査方向1030はX座標に割り当てられ、走査幅1040はY座標に割り当てられる。
【0019】
ある実施形態では、前置走査の合焦手順の間に、様々な合焦点1050が手動又は何らかの自動手順の何れかによりスライド上で選択される。これらの合焦点は、その位置における最適焦点高さを同定するために、走査に先行してアクセスされる。これらの最適焦点高さは、走査プロセスの間の顕微鏡対物レンズの焦点合わせを補助するために使用される。図示した実施形態では、各合焦点[1050]はスライド上に1つの位置(X,Y)を有する。
【0020】
図2は、本発明の一実施形態に係る、スライドを走査するときの顕微鏡スライドの一例の側面図及び対物レンズ経路を例示するブロック図である。図示した実施形態では、X座標に割り当てられた走査方向2030へ経路2020に沿って移動する対物レンズ2010が示されている。これは、スライド2060を静止状態に保持して対物レンズ2010を移動させることにより、又は逆に、対物レンズ2010を静止状態に保持してスライド2060を移動させることにより達成されてもよい。何れの場合も、相対動作及びスライドに対するレンズの経路は同じである。走査中、(Z座標に割り当てられた)対物レンズの高さ2040は、操作プロセスの間、組織2050に焦点が合った状態を保つように調節される。
【0021】
(前述の特許文献2により詳しく述べられている)最良焦点の高さ2070を決定するための手順は、まず対物レンズを各合焦点1050上へ配置し、次にスライド上のその位置に最良焦点をもたらすZ軸上の高さ2040を決定することを含む。この点のセットから焦点面が決定され、対物レンズは、走査プロセスの間中この焦点面を辿る。走査システムはこの焦点合わせを自動的に実行し、ある実施形態では、点は、システムのドリフトを明らかにするために一定の間隔で再度焦点を合わされる。
【0022】
図2に示すように、組織2050は完全に平らではなく、スライド2060はX及びZ軸に対して傾斜される。通常、顕微鏡スライド上の組織試料は薄く(5ミクロン)、これを載せるガラススライドはほぼ平面である。加えて、高倍率の対物レンズ(例えば、20倍)は狭い被写界深度(典型的には、5ミクロン未満)を有する。性能の良いスキャナ上に完璧に準備されたスライドが、スライド面からの焦点高さ5ミクロンのばらつきで走査エリア全体(典型的には、合計面積25mm×75mm)の上に10乃至50ミクロンの傾斜を有することは一般的である。従って、この状況で組織試料に沿った焦点面は、組織の厚さ及び高さの変化を説明する小さい偏移範囲内で実質的に平面になることが予期される。この予期される範囲を超える高さ値を有する合焦点は、その組織が、走査される画像のそのエリアにおいて焦点外れになる可能性があることを示す。効果的には、これらの異常な合焦値(「外れ値」)の識別は、手動検査及び必要であれば再走査をされる可能性のある疑わしい画質を有する仮想スライド画像を識別するための手段を提供する。
【0023】
前置走査合焦値(本明細書では、前置合焦値又は合焦値とも称される)は、3つのデカルト座標(X,Y,Z)によって決定される。各合焦点は、合焦値を有する。走査方向1030の値(X座標)及び走査幅1040の値(Y座標)はスライド上の点を特定し、高さ2040の値(Z座標)は、組織を最適合焦へと至らせる、この位置上の対物レンズの高さを特定する。X、Y及びZ座標は、共同で、前置合焦値を確立する。これらの座標を決定するための代替手順は、前述の特許文献2にさらに詳しく論じられている。概して、このようなN個の合焦点が存在し、ここで、Nは、任意の正数であってもよいが、実際的な目的のためには、1から100までの範囲であることが最も多い。
【0024】
図3は、本発明の一実施形態に係る、最良適合表面を計算しかつ異常な合焦点を識別するための一例のプロセスを例示するフロー図である。まず、ステップ200において、合焦点毎に1つの合焦値を有するN個の合焦点が識別される。仮想スライド画像評価が走査プロセス完了後に行われる実施形態では、合焦点は、例えばデータストレージエリアから検索されてもよく、そうでなければメモリから取得されても、再計算されてもよい。仮想スライド画像評価が(走査中)リアルタイムで行われる実施形態では、合焦点は、メモリ内のある位置から検索されてもよく、若しくはファイルストレージから検索されても、他の方法で取得されてもよい。
【0025】
図示した実施形態では、最良適合表面がステップ205、210及び215で計算される。この最良適合表面は、必ずしも先に述べた焦点面に一致しない。むしろこの最良適合表面は、走査エリア(又は、リアルタイムの実施形態において走査されるべきエリア)に渡って様々な合焦点の平均を表す実質上の平面である。ある実施形態では、最良適合表面は、最小二乗法を使用して様々な合焦点から計算され得る。他の実施形態では、最良適合表面は、他の方法を使用して計算され得る。
【0026】
最良適合表面が平面である単純な実施形態では、この最良適合表面は3つのパラメータ(a,b,c)によって特定されてもよい。従って、最良適合表面上に存在する全ての点(X,Y,Z)は、以下の表面方程式を満足する。
【0027】
[数1]
a+bX+xY=Z
【0028】
ステップ205では、表面方程式が各合焦値に適用される。様々な合焦値には、1からNまでの番号を付けることができ、i番目の値は(Xi,Yi,Zi)で示される。方程式のこのセットは、ステップ210で組み立てられる行列方程式を含む。数学的には、この行列方程式を下記のように表すことができる。
【0029】
【数1】
【0030】
上記行列方程式における省略記号は、行列表示における反復パターンを示す。N=3であれば、行列は3×3であり、これは、3つの点が一平面を一意に決定するという事実によって正確な解を得ることができる。実際には、Nは3より遙かに大きい。ステップ215では、パラメータ(a,b,c)が、例えば標準的な最小二乗法を使用して決定される。これらのパラメータは、行列方程式に関する最良適合表面の最終的な計算を可能にする。最小二乗解を求めるためには、ガウスの消去法、又は例えばコレスキー因数分解等のその派生方法の1つを含む様々な既知の技術が存在する。若しくは、最小二乗解は、一般化逆数による特異値分解を使用して直接計算することができる。これらの解の方法は、行列線形代数分野における当業者の誰にも周知である。
【0031】
他の実施形態では、平面以外の最良適合表面が使用されてもよい。例えば、ガラススライドが平らでなく、幾分かの曲率又は曲りを有するとすれば、放物面が効果的であろう。多項式表現を使用すれば、放物面の方程式は、以下のように表すことができる。
【0032】
[数2]
a+bX+cY+dXX+eYY+fXY=Z
【0033】
この方程式には、6つのパラメータ(a,b,c,d,e,f)が存在する。従って、対応する行列方程式は6つの列を有することになり、下記のように表される。
【0034】
【数2】
【0035】
上記行列の定式化は、任意の表面に拡大することができ、その結果、行列方程式はその表面の記載に必要な数のパラメータ及び列を有するであろう。行列方程式が一旦このようにして生成されると、パラメータは、表面の複雑さに関わりなく、同じ最小二乗解法を使用して求められる。当業者であれば、行列の定式化を平面又は放物面より複雑な表面に適用し得る方法を理解するであろう。
【0036】
ステップ220では、最良適合表面からの各合焦点の距離が、以下の方程式を使用して、合焦点Zの値(Zi)から最良適合表面の値Zを減算することにより計算される。
【0037】
[数2]
Di=Zi−a−bXi−cYi
【0038】
最良適合表面の任意の傾斜が除去されると、各合焦点の調節されたZ値はゼロに近い小さい範囲に密集される。次に、任意の合焦点の最良適合表面からの最大距離の値が同定される。この最大距離の値を、Dmaxという。
【0039】
次に、Dmax値は所定のしきい値と比較され、Dmax値がしきい値を超えているかどうかが確認される。ステップ225における決定により、Dmaxがしきい値を超えていれば外れ値が検出されていることになり、仮想スライド画像は、ステップ230において疑わしい画質を有しかつ手動検査が必要であるとしてフラグを付けられる。ステップ225において決定されるように、Dmaxがしきい値より少なければ外れ値は検出されず、仮想スライド画像は、ステップ235に示すように、良好な画質を有するとして分類される。ある実施形態では、しきい値として妥当な値は5ミクロンであるが、しきい値は、任意の値に設定されることによって、例えば画質の悪い仮想スライド画像の識別を最適化し得る。例えば、ある代替実施形態では、しきい値を10ミクロンに設定され得る。
【0040】
図4は、本発明の一実施形態に係る、合焦点の一例のセット及び最良適合表面の基準線を例示するグラフ図である。図示された実施形態において、低い合焦品質を有する仮想スライド画像の様々な合焦点に関して、調節された合焦値4010及び4020が示されている。この仮想スライド画像に関しては、合計74個の合焦点が示されている。良好な合焦値は、白丸4010で示されている。外れ合焦値は、グラフ下部で容易に認められ、黒丸4020として示されている。調節された合焦値0.0を有する合焦点は、最良適合表面の基準線4030の真上に存在する。図示されたグラフに見られるように、良好な合焦値を有する合焦点は基準線の近傍に密集し、外れ値は基準線から遠く離れて存在する。効果的には、外れ値は何れも容易に識別することができ、この特定の仮想スライド画像は疑わしいとして分類され、手動検査を必要とすることにより、それが画質の悪さにより再走査されなければならないかどうかが決定されるであろう。
【0041】
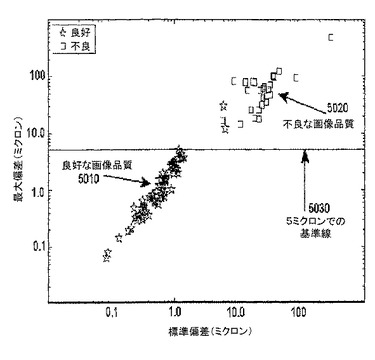
図5は、本発明の一実施形態に係る、仮想スライドの評価された画質の実験データの一例のセットを例示するグラフ図である。先に論じたように、ある実施形態では、しきい値は5ミクロンであってもよい。効果的には、しきい値は経験的に決定され、立証され得る。これは、89個の仮想スライド画像のセットで実行され、その結果は図5に示されている。図示した例では、各画像は、視覚的に検査され、善し悪しが分類された。次に、外れ値検出手順を使用して、各画像に関する調整されたZの最大値(Dmax)が求められた。また、各画像の調整されたZの値の統計も調べられて分布の標準偏差を決定したが、これはしきい値の決定に不可欠のものではない。
【0042】
図示した例では、良好な画像5010は星の記号で示され、不良な画像5020は四角で示されている。基準線5030は5ミクロンの位置に示され、不良な画像と良好な画像とを明確に分けている。従って、しきい値を5ミクロンに設定することにより、外れ値検出手順は、不良な画像を全く見逃すことがなかった。即ち、感度(sensitivity)1.0である。より重要なことに、しきい値を超える30画像のうちの28画像は実際に低質である。即ち、特異度(specificity)は28/30=0.93である。従って、良好な画像であって手動検査の必要ありとして同定されたものは僅かに2つであった。これは、スキャナの操作者は疑いのある画像を識別し、手動検査をこれらの画像にのみ制限するためにこの外れ値検出手順を自信をもって使用することができることを意味する。これにより、良好な合焦品質に関して検査する必要のある画像の数は大幅に減少する。
【0043】
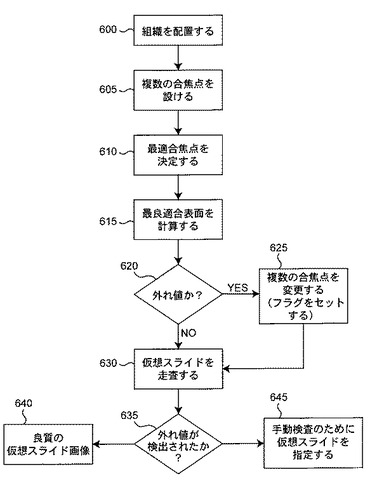
図6は、本発明の一実施形態に係る、顕微鏡スライド又はその一部を走査する間に画質を評価するための一例のプロセスを例示するフロー図である。図示したリアルタイム評価プロセスは、走査後の画像評価プロセスの代わりに使用することができ、また、画質を向上させかつ手動検査される仮想スライド画像の数を減らすために、走査後の画像評価プロセスと組み合わせても使用することができる。リアルタイム評価プロセスの1つの優位点は、外れ値として識別される合焦点を焦点面から排除し得ることにある。これらの外れ合焦点は、低い合焦品質の主たる原因であることから、これらを使用前に排除すれば、スキャナにより生成される良好な品質の画像の割合は上がる。さらに、前置走査合焦手順は外れ値検出手順によって増強されることがあり、例えば、走査システムは、外れ値として識別されて排除された任意の合焦点に近い新たな合焦点を識別することができるようになる。
【0044】
まず、プロセスは、ステップ600において組織標本を顕微鏡スライド上へ配置することによって始まり、次に、ステップ605に示すように、組織標本上の様々な位置に合焦点が設けられる。次に、ステップ610において、走査システムは様々な合焦点の合焦値を取得し、次いでステップ615において、最良適合表面が計算される。この時点で、外れ値検出手順がステップ620で採用され、合焦点の何れかが外れ値であるか否かを決定する。外れ値が存在すれば、これらの合焦点はステップ625において、例えば外れ値を合焦点のセットから除去することによって、若しくは、位置を僅かに変えて、その合焦点の新しい位置の合焦値を再度捕捉することによって修正される。例えば、合焦点を僅かに移動させると、合焦値が誤って読み取られる原因となったペンマーク又は他のマーキングが排除されることもある。
【0045】
さらに、ステップ625では、任意選択として、外れ値が最初に検出されたことを示すフラグをセットすることができる。これにより、効果的には、仮想スライド画像に、捕捉される仮想スライド画像の全体的な品質を向上させるために手動検査を必要とするものとしてフラグを付けることができる。若しくは、外れ値合焦点が除去されて外れ値でない合焦点と置換されれば、フラグはセットされなくてよい。効果的には、外れ値合焦点を非外れ値合焦点で置換すれば、手動検査を必要とする仮想スライド画像の合計数を減じることができる。
【0046】
外れ値合焦点の修正後、若しくは、外れ値合焦点が存在しなければ、ステップ630において仮想スライドが走査される。この時点で、代替実施形態では、ステップ605から630までが(インタリーブされる)仮想スライド画像捕捉プロセスの一部として捕捉される個々のストライプについて繰り返し行われてもよく、若しくはこれらのステップは、仮想スライド画像捕捉のプロセス全体の前に一度だけ行われてもよい点に留意することが重要である。
【0047】
走査プロセスの完了後、ステップ635において決定されるように、任意選択である外れ値フラグがセットされていれば、仮想スライド画像は、ステップ645に示すように手動検査を指定されてもよい。若しくは、外れ値フラグの存在は、走査システムの統計的追跡のために認識されるだけであってもよい。ステップ635において決定されるように、外れ値が検出されなければ、若しくは、フラグがセットされていても、単なる統計的追跡目的であれば、ステップ640に示すように、仮想スライド画像は良好な品質を有するものとして分類される。
【0048】
合焦点を既に修正している、若しくは排除している仮想スライド画像の手動検査を指定することの利点の1つは、向上された品質管理である。外れ点は使用されていない、又は修正されて、修正された合焦点は外れ値でなくなっていることから、効果的には、最終的な仮想スライド画像は、初期には外れ値が検出されていたとしても、検査時には良好な品質であるというより高い可能性を有する。これは、手動検査は引き続き実行されるが、再走査が必要となる可能性は少なく、これにより、追加的な時間の節約がもたらされると共に、品質管理が向上することを意味する。
【0049】
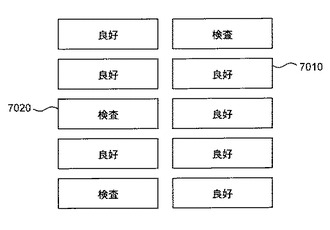
図7は、本発明の一実施形態に係る、手動検査プロセスを能率化するための一例のディスプレイ表示を例示するブロック図である。図示された実施形態において、捕捉された10個の仮想スライド画像のセットが、例えばコンピュータデバイスのディスプレイ画面で操作者に提示される。ある実施形態では、ディスプレイ画面は走査デバイスのコンソールであってもよい。スキャナの操作者を補助するために、画質結果は視覚表示で示され得る。例えば、図示された実施形態では、走査されたスライドを表示する一連の矩形が、手動検査を必要とする仮想スライド画像を識別する文字を刻まれて示されている。若しくは、グラフィックインジケータ又は色コードインジケータが使用されてもよい。
【0050】
仮想スライド画像7010のように良好な画像として分類されている仮想スライド画像については、操作者は手動検査を行う必要がない。仮想スライド画像7020のように手動検査が必要であるとしてフラグを付けられている仮想スライド画像については、操作者は、例えば疑わしい仮想スライド画像を表す矩形をクリックすることによって、手動検査を効率的に行ってもよい。効果的には、これにより、結果的に実際の仮想スライド画像が同じディスプレイ画面に表示されるようなビューイングアプリケーションが実行されてもよい。
【0051】
ある実施形態では、外れ値が検出されると、外れ値の合焦点の座標を捕捉することができ、次に、疑わしい仮想スライド画像が手動検査を要するとして操作者に表示されたとき、疑わしい特定のエリアがまず操作者に表示されて検査プロセスをさらに能率化してもよい。若しくは、識別された外れ値合焦点を包囲する領域が仮想スライド画像上のオーバーレイによって略示されてもよく、若しくはそうでなければ強調表示又は同定されて仮想スライド画像の迅速な手動検査を促進してもよい。当然ながら、操作者は、仮想スライド画像全体をパン及びズームして品質を検査し、画質が良いか否か、若しくはスライドの再走査が必要であるか否かを決定することもできるであろう。
【0052】
効果的には、操作者は、手動検査が必要であるとして識別された仮想スライド画像を手動で検査するだけでよい。操作者は、一瞥して容易に検査すべき画像が存在するかどうかを理解し、直接これらの画像について視覚検査をすることができる。これは、何れかの画像がさらなる検査を要するかどうかを即座に認識することによって、操作者の時間を節約し、プロセス全体をより効率的なものにする。さらに、再走査プロセスもまた能率化されるように、グラフ表示が操作者に再走査モードへの簡易なアクセスを提供してもよい。
【0053】
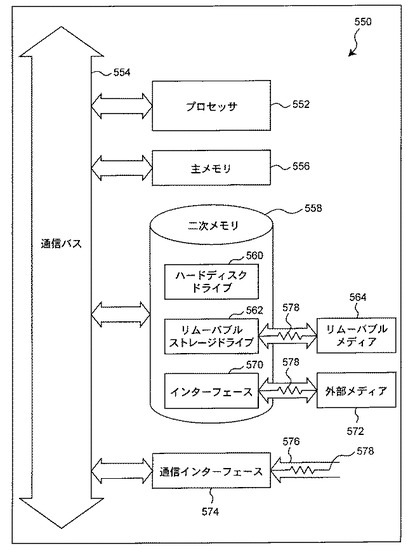
図8は、本明細書に記載されている様々な実施形態に関連して使用され得る一例としてのコンピュータシステム550を例示するブロック図である。例えば、コンピュータシステム550は、数例を挙げるだけでも、画像取込みデバイス、画像プロセッサデバイス又は画像サーバデバイスと併せて使用されてもよい。当業者には明白であるように、他のコンピュータシステム及び/又はアーキテクチャが使用されてもよい。
【0054】
コンピュータシステム550は、好適には、プロセッサ552等の1つ以上のプロセッサを含む。さらに、入/出力を管理する補助プロセッサ、浮動小数点数学演算を実行する補助プロセッサ、信号処理アルゴリズムの高速実行に適したアーキテクチャを有する専用マイクロプロセッサ(例えば、デジタル信号プロセッサ)、主処理システムに従属するスレーブプロセッサ(例えば、バックエンドプロセッサ)、デュアル又はマルチプロセッサシステム用の追加のマイクロプロセッサ又はコントローラ、若しくはコプロセッサ等の追加のプロセッサが提供されてもよい。このような補助プロセッサは、離散プロセッサであっても、プロセッサ552と統合されてもよい。
【0055】
プロセッサ552は、好適には、通信バス554へ接続される。通信バス554は、コンピュータシステム550のストレージと他の周辺コンポーネントとの間の情報転送を促進するためのデータチャネルを含んでもよい。通信バス554はさらに、データバス、アドレスバス及び制御バス(図示されていない)を含む、プロセッサ552との連絡に使用される信号のセットを提供してもよい。通信バス554は、例えば業界標準アーキテクチャ(「ISA:Industry Standard Architecture」)、拡張業界標準アーキテクチャ(「EISA:Extended Industry Standard Architecture」)、マイクロチャネルアーキテクチャ(「MCA」)、周辺コンポーネント相互接続(「PCI:Peripheral Component Interconnect」)ローカルバス、又は電気電子学会(「IEEE:Institute of
Electrical and Electronics Engineers」)が普及している、IEEE488汎用インタフェースバス(「GPIB:General-Purpose Interface Bus」)、IEEE696/S−100及び等を含む規格に準拠するバスアーキテクチャ等である任意の標準又は非標準バスアーキテクチャを備えてもよい。
【0056】
コンピュータシステム550は、好適には、主メモリ556を含み、かつ二次メモリ558を含んでもよい。主メモリ556は、プロセッサ552上で実行するプログラムのための命令及びデータのストレージを供給する。主メモリ556は、典型的には、ダイナミックランダムアクセスメモリ(「DRAM」)及び/又はスタティックランダムアクセスメモリ(「SRAM」)等の半導体ベースのメモリである。他の半導体ベースのメモリのタイプとしては、例えば、読取り専用メモリ(「ROM:Read Only Memory」)を含む、同期ダイナミックランダムアクセスメモリ(「SDRAM:Synchronous Dynamic Random Access Memory」)、ラムバスダイナミックランダムアクセスメモリ(「RDRAM:Rambus Dynamic Random Access Memory」)、強誘電ランダムアクセスメモリ(「FRAM:Ferroelectric Random
Access Memory」)等が含まれる。
【0057】
二次メモリ558は、任意選択として、ハードディスクドライブ560及び/又は、例えばフロッピー(登録商標)ディスクドライブ、磁気テープドライブ、コンパクトディスク(「CD」)ドライブ、デジタルバーサタイルディスク(「DVD」)ドライブ等のリムーバブルストレージドライブ562を含んでもよい。リムーバブルストレージドライブ562は、リムーバブルストレージメディア564との間で周知方法により読取り及び/又は書込みを行なう。リムーバブルストレージメディア564は、例えば、フロッピー(登録商標)ディスク、磁気テープ、CD、DVD等であってもよい。
【0058】
リムーバブルストレージメディア564は、好適には、コンピュータ実行可能コード(即ち、ソフトウェア)及び/又はデータを格納しているコンピュータ読取り可能メディアである。リムーバブルストレージメディア564に格納されたコンピュータソフトウェア又はデータは、電気通信信号578としてコンピュータシステム550へ読み込まれる。
【0059】
代替実施形態では、二次メモリ558は、コンピュータプログラム又は他のデータ又は命令をコンピュータシステム550へロードできるようにする他の類似手段を含んでもよい。このような手段としては、例えば、外部ストレージメディア572及びインタフェース570が含まれてもよい。外部ストレージメディア572の例としては、外部ハードディスクドライブ又は外部光ドライブ及び/又は外部磁気光学ドライブが含まれてもよい。
【0060】
二次メモリ558の他の例としては、プログラム可能読取り専用メモリ(「PROM:Programmable Read-Only Memory」)、消去可能なプログラム可能読取り専用メモリ(「EPROM:Erasable Programmable Read-Only Memory」)、電気的に消去可能な読取り専用メモリ(「EEPROM:Electrically
Erasable Read-Only Memory」)又はフラッシュメモリ(EEPROMに類似するブロック指向のメモリ)等の半導体ベースのメモリが含まれてもよい。また、ソフトウェア及びデータをリムーバブルストレージユニット572からコンピュータシステム550へ転送できるようにする他の任意のリムーバブルストレージユニット572及びインタフェース570も含まれる。
【0061】
またコンピュータシステム550は、通信インタフェース574を含んでもよい。通信インタフェース574は、ソフトウェア及びデータがコンピュータシステム550と、外部デバイス(例えば、プリンタ)、ネットワーク又は情報ソースとの間で転送できるようにする。例えば、コンピュータソフトウェア又は実行可能コードは、ネットワークサーバから通信インタフェース574を介してコンピュータシステム550へ転送されてもよい。通信インタフェース574の例としては、数例を挙げるだけでも、モデム、ネットワークインタフェースカード(「NIC」)、通信ポート、PCMCIAスロット及びカード、赤外線インタフェース及びIEEE1394ファイアワイヤが含まれる。
【0062】
通信インタフェース574は、好適には、イーサネット(登録商標)IEEE802規格、ファイバチャネル、デジタル加入者線(「DSL:Digital Subscriber Line」)、非同期デジタル加入者線(「ADSL:Asynchronous Digital Subscriber Line」)、フレームリレー、非同期転送モード(「ATM:Asynchronous Transfer
Mode」)、統合デジタルサービス網(「ISDN:Integrated Digital Services Network」)、パーソナル通信サービス(「PCS:Personal Communications
Services」)、通信制御プロトコル/インターネットプロトコル(「TCP/IP:Transmission Control Protocol/Internet Protocol」)、シリアルラインインターネットプロトコル/ポイントツーポイントプロトコル(「SLIP/PPP」)等々のような業界が公布するプロトコル標準を実装するが、カスタマイズされた、若しくは非標準インタフェースプロトコルも同様に実装されてもよい。
【0063】
通信インタフェース574を介して転送されるソフトウェア及びデータは、概して、電気通信信号578の形式である。これらの信号578は、好適には、通信チャネル576を介して通信インタフェース574へ供給される。通信チャネル576は信号578を伝送し、かつ、数例を挙げるだけでも電信線又はケーブル、光ファイバ、従来の電話線、携帯電話リンク、無線データ通信リンク、高周波(RF)リンク又は赤外線リンクを含む様々な有線、又は無線通信手段を使用して実装されてもよい。
【0064】
コンピュータ実行可能コード(即ち、コンピュータプログラム又はソフトウェア)は、主メモリ556及び/又は二次メモリ558に格納される。コンピュータプログラムは、また通信インタフェース574を介して受信され、主メモリ556及び/又は二次メモリ558に格納されることもできる。このようなコンピュータプログラムは、実行されると、コンピュータシステム550が先に述べたような本発明の様々な機能を実行することを可能にする。
【0065】
この明細書本文における「コンピュータ読取り可能メディア」という表現は、コンピュータ実行可能コード(例えば、ソフトウェア及びコンピュータプログラム)をコンピュータシステム550へ提供するために使用される任意のメディアを指して使用される。これらのメディアの例としては、主メモリ556、二次メモリ558(ハードディスクドライブ560、リムーバブルストレージメディア564及び外部ストレージメディア572を含む)、及び通信インタフェース574と通信により結合される任意の周辺デバイス(ネットワーク情報サーバ又は他のネットワークデバイスを含む)が含まれる。これらのコンピュータ読取り可能メディアは、コンピュータシステム550へ実行可能コード、プログラミング命令及びソフトウェアを提供するための手段である。
【0066】
ソフトウェアを使用して実装される一実施形態では、ソフトウェアはコンピュータ読取り可能メディア上へ格納され、かつリムーバブルストレージドライブ562、インタフェース570又は通信インタフェース574によってコンピュータシステム550へロードされてもよい。このような実施形態では、ソフトウェアは、コンピュータシステム550へ電気通信信号578の形式でロードされる。ソフトウェアは、プロセッサ552によって実行されると、好適には、プロセッサ552に本明細書で先に述べた発明的特徴及び機能を実行させる。
【0067】
また主としてハードウェアにおいては、例えば特定用途向け集積回路(「ASIC:Application Specific Integrated Circuit」)又はフィールドプログラマブルゲートアレイ(「FPGA」)等のコンポーネントを使用して、様々な実施形態が実装されてもよい。本明細書に記載された機能を実行することのできるハードウェア状態マシンの実装も、当業者には明らかであろう。また様々な実施形態は、ハードウェア及びソフトウェア双方の組み合わせを使用して実装されてもよい。
【0068】
さらに、当業者は、上述の諸図面及び本明細書に開示されている実施形態に関連して記載された例示的な様々な論理ブロック、モジュール、回路及び方法ステップが、しばしば電子ハードウェア、コンピュータソフトウェア又は両者の組み合わせとして実装され得ることを評価するであろう。以上、ハードウェアとソフトウェアのこの互換性を明確に例示するために、様々な例示的コンポーネント、ブロック、モジュール、回路及びステップを概してその機能性に関連して記載した。このような機能性がハードウェア又はソフトウェアとして実装されるかどうかは、全体システムに課される特定の用途及び設計上の制約に依存する。当業者は、記載された機能性を特定の各用途に合わせて様々に実装することができるが、このような実装の決定は、本発明の範囲からの逸脱を招くものとして解釈されるべきではない。さらに、機能をモジュール、ブロック、回路又はステップにまとめることは、説明を簡便にするためのものである。特定の機能又はステップは、本発明から逸脱することなく1つのモジュール、ブロック又は回路からもう1つのものへ移動させることができる。
【0069】
さらに、本明細書に開示されている実施形態に関連して記載された様々な例示的な論理ブロック、モジュール及び方法は、汎用プロセッサ、デジタル信号プロセッサ(「DSP:Digital Signal Processor」)、ASIC、FPGA又は他のプログラム可能論理デバイス、離散ゲート又はトランジスタ論理、離散型ハードウェアコンポーネント又は本明細書に記載されている機能を実行するように設計されるこれらの任意の組み合わせによって実装又は実行されてもよい。汎用プロセッサはマイクロプロセッサであってもよいが、代替例では、プロセッサは任意のプロセッサ、コントローラ、マイクロコントローラ又は状態マシンであってもよい。プロセッサは計算デバイスの組み合わせとして、例えば、DSPとマイクロプロセッサの組み合わせ、複数のマイクロプロセッサ、DSPコアと併用する1つ以上のマイクロプロセッサ又は他の任意のこのような構成として実装されてもよい。
【0070】
さらに、本明細書に開示されている実施形態に関連して述べた方法のステップ又はアルゴリズムは、ハードウェア、プロセッサにより直接実行されるソフトウェアモジュール又は両者の組み合わせの形で具現され得る。ソフトウェアモジュールは、RAMメモリ、フラッシュメモリ、ROMメモリ、EPROMメモリ、EEPROMメモリ、レジスタ、ハードディスク、リムーバブルディスク、CD−ROM又はネットワークストレージメディアを含む他の任意の形式のストレージメディア内に存在し得る。一例としてのストレージメディアは、プロセッサがストレージメディアとの間で情報の読取り及び書込みを行えるようにプロセッサへ結合され得る。上記代替例では、ストレージメディアはプロセッサに統合され得る。また、プロセッサ及びストレージメディアは、また、ASIC内に存在し得る。
【0071】
開示した実施形態に関する上述の説明は、任意の当業者が本発明を利用できるように提供される。当業者には、これらの実施形態に対する様々な修正が直ちに明らかとなり、本明細書に記載された一般原理は、本発明の精神及び範囲を逸脱することなく他の実施形態に適用できる。従って、本明細書に提示されている説明及び図面は、本発明の現時点での好適な実施形態を表し、よって、本発明により広範に企図されている発明対象を表すものである点は理解されるべきである。さらに、本発明の範囲は、当業者にとって自明となる可能性のある他の実施形態を完全に包含すること、よって、本発明の範囲は唯一、添付の請求の範囲によってのみ限定されることも理解される。
【符号の説明】
【0072】
1010 走査エリア
1020 組織標本
1030 走査方向
1040 走査幅
1050 合焦点
【特許請求の範囲】
【請求項1】
仮想顕微鏡スライド画像の画質を評価するためのコンピュータにより実行される方法であって、
仮想顕微鏡スライド画像を走査するために使用された複数の合焦点を識別することと、
上記複数の合焦点から最良適合表面を計算することと、
上記最良適合表面からの各合焦点の距離を決定することと、
任意の合焦点の上記最良適合表面からの最大距離を同定することと、
上記同定された任意の合焦点の最大距離を所定のしきい値距離と比較することによって上記仮想顕微鏡スライド画像の画質を評価することを含む方法。
【請求項2】
上記同定された任意の合焦点の最大距離が上記所定のしきい値距離より大きいとき、手動検査のために上記仮想顕微鏡スライド画像を指定することをさらに含む請求項1記載の方法。
【請求項3】
上記手動検査のために指定された仮想顕微鏡スライド画像を識別する複数の仮想スライド画像を表すグラフ表示を操作者に提供することをさらに含む請求項2記載の方法。
【請求項4】
上記第1の仮想スライド画像の手動検査要求に応答して、第1の仮想スライド画像を表示することをさらに含む請求項3記載の方法。
【請求項5】
上記同定された最大距離を有する合焦点に対応する上記第1の仮想スライド画像の部分を初めに提示することをさらに含む請求項4記載の方法。
【請求項6】
上記所定のしきい値距離は約5ミクロンである請求項1記載の方法。
【請求項7】
上記所定のしきい値距離は約10ミクロンである請求項1記載の方法。
【請求項8】
上記最良適合表面は最小二乗法を使用して計算される請求項1記載の方法。
【請求項9】
上記最良適合表面はL1ノルム絶対値誤差法を使用して計算される請求項1記載の方法。
【請求項10】
上記最良適合表面はチェビシェフのミニマックスノルム法を使用して計算される請求項1記載の方法。
【請求項11】
上記最良適合表面は実質的に平面である請求項1記載の方法。
【請求項12】
仮想顕微鏡スライド画像の画質を評価するためのコンピュータにより実行されるシステムであって、
仮想顕微鏡スライド画像を走査する際に使用される複数の合焦点を識別するように構成される合焦点識別子モジュールと、
上記複数の合焦点から最良適合表面を計算するように構成される最良適合表面モジュールと、
任意の合焦点の上記最良適合表面からの最大距離を同定するように構成される距離モジュールと、
上記最良適合表面からの上記同定された任意の合焦点の最大距離を、所定のしきい値距離と比較することによって上記仮想顕微鏡スライド画像の画質を評価するように構成される比較モジュールとを備えるシステム。
【請求項13】
上記比較モジュールはさらに、上記同定された任意の合焦点の最大距離が上記所定のしきい値距離より大きいとき、手動検査のために上記仮想顕微鏡スライド画像を指定するように構成される請求項12記載のシステム。
【請求項14】
上記所定のしきい値距離は約5ミクロンである請求項12記載のシステム。
【請求項15】
上記所定のしきい値距離は約10ミクロンである請求項12記載のシステム。
【請求項16】
上記最良適合表面モジュールはさらに、最小二乗法を使用して上記最良適合表面を計算するように構成される請求項12記載のシステム。
【請求項17】
上記最良適合表面モジュールはさらに、実質的に平面である最良適合表面を計算するように構成される請求項12記載のシステム。
【請求項18】
仮想顕微鏡スライド画像の画質をリアルタイムで評価するためのコンピュータにより実行される方法であって、
顕微鏡スライド上の組織標本上の複数の合焦点を識別することと、
上記複数の合焦点から最良適合表面を計算することと、
上記最良適合表面からの各合焦点の距離を決定することと、
任意の合焦点の上記最良適合表面からの最大距離を同定することと、
上記同定された任意の合焦点の最大距離を所定のしきい値距離と比較することによって上記仮想顕微鏡スライド画像の画質を評価して1つ以上の外れ値合焦点を識別することと、
任意の外れ値合焦点を修正することと、
上記複数の合焦点及び修正された合焦点から焦点面を生成することと、
上記焦点面に従って、上記顕微鏡スライド上の組織標本を走査することを含む方法。
【請求項19】
上記修正するステップは、全ての外れ値合焦点を排除することを含む請求項18記載の方法。
【請求項20】
上記修正するステップは、
外れ値合焦点に近接する新しい合焦点を識別することと、
上記外れ値合焦点を排除することを含む請求項18記載の方法。
【請求項1】
仮想顕微鏡スライド画像の画質を評価するためのコンピュータにより実行される方法であって、
仮想顕微鏡スライド画像を走査するために使用された複数の合焦点を識別することと、
上記複数の合焦点から最良適合表面を計算することと、
上記最良適合表面からの各合焦点の距離を決定することと、
任意の合焦点の上記最良適合表面からの最大距離を同定することと、
上記同定された任意の合焦点の最大距離を所定のしきい値距離と比較することによって上記仮想顕微鏡スライド画像の画質を評価することを含む方法。
【請求項2】
上記同定された任意の合焦点の最大距離が上記所定のしきい値距離より大きいとき、手動検査のために上記仮想顕微鏡スライド画像を指定することをさらに含む請求項1記載の方法。
【請求項3】
上記手動検査のために指定された仮想顕微鏡スライド画像を識別する複数の仮想スライド画像を表すグラフ表示を操作者に提供することをさらに含む請求項2記載の方法。
【請求項4】
上記第1の仮想スライド画像の手動検査要求に応答して、第1の仮想スライド画像を表示することをさらに含む請求項3記載の方法。
【請求項5】
上記同定された最大距離を有する合焦点に対応する上記第1の仮想スライド画像の部分を初めに提示することをさらに含む請求項4記載の方法。
【請求項6】
上記所定のしきい値距離は約5ミクロンである請求項1記載の方法。
【請求項7】
上記所定のしきい値距離は約10ミクロンである請求項1記載の方法。
【請求項8】
上記最良適合表面は最小二乗法を使用して計算される請求項1記載の方法。
【請求項9】
上記最良適合表面はL1ノルム絶対値誤差法を使用して計算される請求項1記載の方法。
【請求項10】
上記最良適合表面はチェビシェフのミニマックスノルム法を使用して計算される請求項1記載の方法。
【請求項11】
上記最良適合表面は実質的に平面である請求項1記載の方法。
【請求項12】
仮想顕微鏡スライド画像の画質を評価するためのコンピュータにより実行されるシステムであって、
仮想顕微鏡スライド画像を走査する際に使用される複数の合焦点を識別するように構成される合焦点識別子モジュールと、
上記複数の合焦点から最良適合表面を計算するように構成される最良適合表面モジュールと、
任意の合焦点の上記最良適合表面からの最大距離を同定するように構成される距離モジュールと、
上記最良適合表面からの上記同定された任意の合焦点の最大距離を、所定のしきい値距離と比較することによって上記仮想顕微鏡スライド画像の画質を評価するように構成される比較モジュールとを備えるシステム。
【請求項13】
上記比較モジュールはさらに、上記同定された任意の合焦点の最大距離が上記所定のしきい値距離より大きいとき、手動検査のために上記仮想顕微鏡スライド画像を指定するように構成される請求項12記載のシステム。
【請求項14】
上記所定のしきい値距離は約5ミクロンである請求項12記載のシステム。
【請求項15】
上記所定のしきい値距離は約10ミクロンである請求項12記載のシステム。
【請求項16】
上記最良適合表面モジュールはさらに、最小二乗法を使用して上記最良適合表面を計算するように構成される請求項12記載のシステム。
【請求項17】
上記最良適合表面モジュールはさらに、実質的に平面である最良適合表面を計算するように構成される請求項12記載のシステム。
【請求項18】
仮想顕微鏡スライド画像の画質をリアルタイムで評価するためのコンピュータにより実行される方法であって、
顕微鏡スライド上の組織標本上の複数の合焦点を識別することと、
上記複数の合焦点から最良適合表面を計算することと、
上記最良適合表面からの各合焦点の距離を決定することと、
任意の合焦点の上記最良適合表面からの最大距離を同定することと、
上記同定された任意の合焦点の最大距離を所定のしきい値距離と比較することによって上記仮想顕微鏡スライド画像の画質を評価して1つ以上の外れ値合焦点を識別することと、
任意の外れ値合焦点を修正することと、
上記複数の合焦点及び修正された合焦点から焦点面を生成することと、
上記焦点面に従って、上記顕微鏡スライド上の組織標本を走査することを含む方法。
【請求項19】
上記修正するステップは、全ての外れ値合焦点を排除することを含む請求項18記載の方法。
【請求項20】
上記修正するステップは、
外れ値合焦点に近接する新しい合焦点を識別することと、
上記外れ値合焦点を排除することを含む請求項18記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−93764(P2012−93764A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2011−246947(P2011−246947)
【出願日】平成23年11月10日(2011.11.10)
【分割の表示】特願2007−515378(P2007−515378)の分割
【原出願日】平成17年5月26日(2005.5.26)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.FRAM
【出願人】(503293765)アペリオ・テクノロジーズ・インコーポレイテッド (24)
【氏名又は名称原語表記】Aperio Technologies, Inc.
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【分割の表示】特願2007−515378(P2007−515378)の分割
【原出願日】平成17年5月26日(2005.5.26)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.FRAM
【出願人】(503293765)アペリオ・テクノロジーズ・インコーポレイテッド (24)
【氏名又は名称原語表記】Aperio Technologies, Inc.
【Fターム(参考)】
[ Back to top ]