
仮想画像を使用した患者トラッキング
仮想画像を使用して患者をトラッキングする装置及び方法。

【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、放射線治療の分野に関し、より詳細には、放射線治療中の患者トラッキングに関する。
【背景技術】
【0002】
放射線外科手術は、病理学の腫瘍又は病巣部位を崩壊させるために、単分割治療又は低分割治療において高用量のイオン化放射線を照射する低侵襲性処置である。放射線量は、側副器官に対する損傷を少なくしながら、腫瘍の形状に最適に合わせなければならない。ターゲットの病巣やその周辺の発症組織の識別は普通、手術前病巣識別段階中に、患者の基準フレームに関する三次元(3D)空間内で行われる。手術前計画段階中に、隣接する健康な組織に照射される用量を最小限に抑えながら、適合用量がターゲットの周りに刻まれる。これは、その相対的な重さ又は線量の寄与がそれに応じた用量を、容量的に形成するような尺度にされたビーム位置の組合せを使用して達成することができる。演繹的計画として知られるモデルでは、ユーザは様々なビームの所望の重さを手動で特定する。帰納的計画方法は、ターゲット組織と健康な組織に対するユーザが決めた用量制約に基づき、ビームと重さの最適な組合せを自動的に計算するアルゴリズムを利用する。
【0003】
腫瘍治療の別の方法は、外部ビーム放射線治療である。1つのタイプの外部ビーム放射線治療では、外部放射線源は多数の角度からの腫瘍部位にX線ビームのシーケンスを案内するのに使用され、患者は腫瘍がビームの回転の中心(アイソセンタ)にあるように位置決めされている。放射線源の角度が変えられて、全てのビームが腫瘍部位を通過し、腫瘍への途中で健康な組織の異なる領域を通過する。その結果、腫瘍における累積放射線量は高く、健康な組織への平均放射線量は低い。放射線治療セッションで利用される放射線量は普通、放射線外科手術セッションで使用される量と比べて、ある程度ほぼ小さい。放射線治療は普通、治療毎の低用量(例えば、100〜200センチグレイ(cGy))、短い治療時間(例えば、治療毎に10から30分)、過分割照射法(例えば、30から45日の治療)を特徴としている。便宜上、「放射線治療」という用語は本明細書では、放射線の量によりそうでないと記されない限り、放射線外科治療及び/又は放射線治療のことを意味するのに使用される。
【0004】
放射線治療中、患者は自分の位置又は向きを変えることができる。加えて、病理解剖学的構造(例えば、腫瘍、病巣、脈管奇形など)は、治療中に移動し、正確なターゲット集中(すなわち、ターゲットの位置の正確なトラッキング)を低下させることがある。最も顕著には、軟組織ターゲットは、放射線外科治療実施セッション中に患者の呼吸で移動する。呼吸運動によって、例えば3センチ(cm)より大きい、胸部又は腹部の腫瘍が移動する。放射線治療では、治療されている病理解剖学的構造への放射線ビームの正確な照射が、治療計画段階中に計算された放射線量分布を達成するために、重要である。
【発明の開示】
【課題を解決するための手段】
【0005】
ターゲットのトラッキング動作に対する従来の一解決法は、患者の外側(例えば、皮膚)に配置された外部マーカ(例えば、赤外線放射装置)を利用する。可視光線(例えば、赤外線)トラッキングシステムを使用して外部マーカが自動的にトラッキングされる。しかし、外部マーカでは、呼吸動作によって生じる内部変位を適切に反映させることができない。大きな外部患者動作が、極めて小さい内部移動と共に生じることがある。例えば、内部ターゲットは皮膚表面よりはるかにゆっくり移動する。
【0006】
ターゲットのトラッキング動作に対する別の従来の解決法は、移植した基準の使用が必要である。普通、放射線不透過性基準マーカ(例えば、金種、又はステンレス鋼ねじ)が、治療の前にターゲット器官に近接して、又はその中に移植され、治療実施中に基準点として使用される。ステレオX線画像化は、これらの基準マーカの正確な空間的位置を算出するために治療中に使用される(例えば、10秒毎に1回)。しかし、内部マーカだけでは正確なトラッキングには十分でない。さらに、内部基準マーカのトラッキングは患者にとって難しい可能性がある。というのは、骨に移植した基準マーカを使用して高精度が得られる傾向があるからである。骨への基準マーカの移植は、特に頸椎に対して難しく痛みを伴う侵襲性処置が必要であり、頻繁に臨床的合併症につながることがある。加えて、骨に移植した基準マーカのトラッキングによりさらに、軟組織ターゲットの移動又は変形に対する正確な結果が与えられないことがある。さらに、基準マーカが骨に移植されるか、又はコンピュータ断層撮影(CT)監視によりターゲット領域の近くで軟組織内に生検針を通して注入されるかどうかに関わらず、患者はさらに放射線治療の前にこのような侵襲性処理を受けなければならない。
【0007】
移植した基準マーカを使用することなく腫瘍の移動をトラッキングする従来の技術が、A.Schweikard,H Shiomi,J.Adler、Respiration Tracking in Radiosurgery Without Fiducials、Int J Medical Robotics and Computer Assisted Surgery、2005年1月、19〜27ページに記載されている。記載されている基準のないトラッキング技術は、画像位置合わせ法を使用する。これらの方法は、関連する変換の性質によって異なる可能性がある。より詳細には、変換は剛性又は変形可能である。剛性変換(例えば、頭の画像に対する)は普通平行移動と回転を可能にするだけであるが、変形可能な変換は明らかにより複雑な問題を解決することが必要である。
【0008】
画像位置合わせ方法は、単モーダル(又は、イントラモダリティ)位置合わせと多モーダル(又は、インターモダリティ)位置合わせに分割することができる。単モーダル応用例では、位置合わせされる画像は、位置合わせされる画像が異なるモダリティから生じる多モーダル応用例と反対に、同じモダリティに属している。同じモダリティの画像間の高程度の類似性により、単モーダル位置合わせを解決することは普通、特に変形可能な変換では、多モダリティ応用例よりある程度簡単である。
【0009】
放射線治療中に患者の位置及び向きを測定する既存の解決法は、治療前CTスキャンでの治療中に撮られた放射X線を位置合わせすることが必要である。しかし、X線は患者に追加の放射線被曝なしでしばしば撮ることができないのでこの方法は限られている。さらに、ターゲット領域の近くで基準マーカを移植することなく、X線上で軟組織器官(例えば、肺)をトラッキングすることが難しい。
【発明を実施するための最良の形態】
【0010】
本発明の実施形態は、添付の図面に限定ではなく、例として示されている。
【0011】
以下の説明では、本実施形態の完全な理解を行うために、特定の構成部品例、デバイス例、方法例などの多くの特定の詳細が記載されている。しかし、これらの特定の詳細は本実施形態を実行するのに利用する必要がないことは当業者には明らかである。他の例では、よく知られている材料又は方法は、本実施形態を不必要に不明瞭にするのを避けるために、詳細には記載されていない。
【0012】
本明細書で使用される「結合された」という用語は、1つ又は複数の介在構成部品を通して直接又は間接的に結合されることを意味する。本明細書に記載した様々なバス上に与えられた信号のいずれかは、他の信号で時間分割多重化し、1つ又は複数の共通バス上に提供することができる。加えて、回路構成部品又はブロック間の相互接続は、バス又は単信号ラインとして示すことができる。各バスは別の方法では、1つ又は複数の単信号ラインであってもよく、単信号ラインはそれぞれ別の方法ではバスであってもよい。本明細書で使用されるような「第1の」、「第2の」、「第3の」、「第4の」などの用語は、異なる要素間で区別するラベルとして示され、その数字の表示に応じた順序的意味を必ずしも有しない。
【0013】
そうでないと特に記されていない限り、以下の議論から明らかなように、明細書全体を通して、「処理する」、又は「算出する」、又は「計算する」、又は「測定する」などの用語を利用した議論は、コンピュータ・システムのレジスタ及びメモリ内で物理(電子)量として示されたデータを、コンピュータ・システム・メモリ又はレジスタ又は他のこのような情報記憶、伝達又は表示デバイス内で物理量として同様に示された他のデータにオペレーション及び変換する、コンピュータ・システム、又は同様の電子計算デバイスの動作や過程のことを言うということが理解されるであろう。本明細書に記載した方法の実施形態は、コンピュータ・ソフトウェアを使用して実施することができる。認められた基準に適合するプログラミング言語で書かれた場合、方法を実施するように設計された命令のシーケンスを様々なハードウェア・プラットフォーム上での実行のために、また様々なオペレーティング・システムへのインターフェイスのためにコンパイルすることができる。加えて、本発明の実施形態はあらゆる特定のプログラミング言語を参照して説明しない。様々なプログラミング言語が、本明細書に記載するように本発明の実施形態を実施するために使用することができる。
【0014】
仮想画像を使用して放射線治療中に患者をトラッキングするための方法とシステムが、記載されている。「放射線治療」という用語は本明細書では、放射線の量によってそうでないと記されていない限り、放射線外科手術及び/又は放射線治療のことを意味するために使用されている。本明細書で使用する「仮想画像」という用語は、アトラス、すなわち、構造の相対位置と形状の意味での実質的に通常の解剖学的構造を有する任意の患者の前に存在した画像、又は多数の患者の平均化画像のことを言う。
【0015】
治療計画中に、所要の放射線量は、手術前画像(例えば、コンピュータ断層撮影(CT)画像、磁気共鳴(MR)画像、又は誘導MRI/CT)を使用して測定される。治療実施中に、患者の現在位置は、患者の手術中画像(例えば、超音波(US)画像、MR画像など)を使用して測定される。手術中画像と手術前画像は、2つの異なるタイプであってもよい。例えば、手術前画像はCT画像で、手術中画像はUS画像である。このような異なる画像の変形可能な位置合わせは、異なる問題を生じる。本発明の実施形態は、アトラスを使用して一連の変形可能な位置合わせを行うことによってこの問題を解消する。アトラスは例えば、その上に超音波情報が描かれたCTアトラスであってもよく、それによってCTアトラス中の全ての位置は対応する超音波強度を有する。手術前CT画像と手術中US画像の間の位置合わせは、一実施形態では、最初にアトラス内のCTデータを使用してCTアトラスとCT画像を位置合わせし、その後US画像とアトラス上の超音波データを位置合わせし、それによって患者の位置をトラッキングすることによって行うことができる。代替形態では、位置合わせは、最初にアトラス上の超音波データを使用してアトラスとUS画像を位置合わせし、その後アトラス上のCTデータを使用してCT画像とアトラスを位置合わせすることによって行うことができる。
【0016】
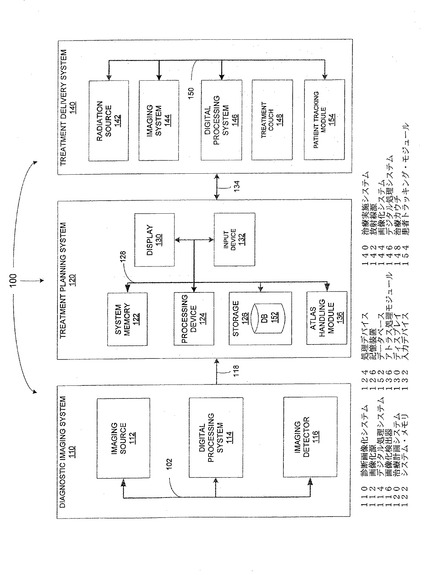
図1は、本発明の特性を実施することができる、放射線治療を行う際に使用することができるシステムの一実施形態を示している。以下に記載し、図1に示すように、システム100は、診断画像化システム110と、治療計画システム120と、治療実施システム140とを備えている。
【0017】
診断画像化システム110は、その後の医療診断、治療計画及び/又は治療実施に使用することができる、患者内の関心部分(VOI)の医療診断画像を生成することが可能なあらゆるシステムであってもよい。例えば、診断画像化システム110は、コンピュータ断層撮影(CT)システム、磁気共鳴画像化(MRI)システム、陽電子放出断層撮影(PET)システム、超音波システムなどである。議論を簡単にするため、診断画像化システム110は、CT画像化モダリティに関連して時に以下で論じることができる。しかし、上のものなどの他の画像化モダリティを使用することもできる。
【0018】
診断画像化システム110は、画像化ビーム(例えば、X線、超音波、高周波など)を生成する画像化源112、及び画像化源112によって生成されるビームを検出し受信する画像化検出器116、又は(例えば、MRI又はPETスキャンにおいて)画像化源からのビームによって刺激される二次ビーム又は放出を含んでいる。一実施形態では、診断画像化システム110は、2つ以上の診断X線源と、2つ以上の対応する画像化検出器を備えている。例えば、2つのX線源が、互いの角度間隔(例えば、90度、45度など)を固定して、画像化される患者の周りに配置され、X線源と反対側で対向させた(1つ又は複数の)画像化検出器に、患者を通して向けることができる。各X線画像化源によって照射される、単一の大きな画像化検出器か、あるいは多数の画像化検出器を使用することができる。別の方法では、他の数及び構成の画像化源及び画像化検出器を使用することができる。
【0019】
画像化源112と画像化検出器116は、画像化オペレーションを制御し、画像データを処理するようにデジタル処理システム114に結合される。診断画像化システム110は、デジタル処理システム114、画像化源112、画像化検出器116の間でデータとコマンドを伝達するバス又は他の手段102を備えている。デジタル処理システム114は、1つ又は複数の汎用プロセッサ(例えば、マイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又はコントローラ又はフィールド・プログラム可能ゲート・アレイ(FPGA)などの他のタイプのデバイスを含むことができる。デジタル処理システム114はまた、メモリ、記憶デバイス、ネットワーク・アダプタなどの他の構成部品(図示せず)を備えることができる。デジタル処理システム114は、例えばDICOM(医用におけるデジタル画像と通信)フォーマットなどの標準的フォーマットでデジタル診断画像を生成するように構成されている。他の実施形態では、デジタル処理システム114は他の基準的又は非基準的デジタル画像フォーマットを生成する。デジタル処理システム114は診断画像ファイル(例えば、上記DICOMフォーマット化ファイル)を、例えば、直接リンク、ローカル・エリア・ネットワーク(LAN)リンク、又はインターネットなどのワイド・エリア・ネットワーク(WAN)リンクなどであるデータ・リンク118上で治療計画システム120に伝達することができる。加えて、システム間で伝達される情報は、遠隔診断又は治療計画構成などで、システムを接続する通信媒体の間をプルされ又はプッシュされる。遠隔診断又は治療計画において、ユーザはシステム・ユーザと患者の間の物理的分離が存在するにも関わらず、診断又は治療計画に本発明の実施形態を利用することができる。
【0020】
治療計画システム120は、画像データを受信し処理する処理デバイス124を備えている。処理デバイス124は、1つ又は複数の汎用プロセッサ(例えば、マイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又はコントローラ又はフィールド・プログラム可能ゲート・アレイ(FPGA)などの他のタイプのデバイスの代わりにもなる。処理デバイス124は、本明細書に論じた治療計画オペレーションを行う命令を実行するように構成されている。
【0021】
治療計画システム120はまた、ランダム・アクセス・メモリ(RAM)を含むシステム・メモリ122、又は情報を記憶しかつ処理デバイス124によって実行される命令を記憶するために、バス128によって処理デバイス124に結合された他の動的記憶デバイスを備えることができる。システム・メモリ122は、同様に、処理デバイス124による命令の実行中に、一時変数又は他の中間情報を記憶するのに使用することができる。システム・メモリ122はまた、読取専用メモリ(ROM)、及び/又は処理デバイス124に対して静的情報と命令を記憶するためにバス128に結合された他の静的記憶デバイスを備えることができる。
【0022】
処理デバイス124はまた、ユーザに情報(例えば、VOIを示す2D又は3D)を表示するための、ブラウン管(CRT)又は液晶ディスプレイ(LCD)などの表示デバイス130に結合されている。キーボードなどの入力デバイス132が、情報及び/又はコマンド選択を処理デバイス124と通信するために、処理デバイス124に結合されている。1つ又は複数の他のユーザ入力デバイス(例えば、マウス、トラックボール、又はカーソル方向キー)も、処理デバイス124に対するコマンドを選択し、ディスプレイ130上のカーソル移動を制御するように、方向情報を通信するのに使用することができる。
【0023】
治療計画システム120はまた、情報と命令を記憶するために、バス128に結合された1つ又は複数の記憶デバイス(例えば、磁気ディスク・ドライブ又は光ディスク・ドライブ)の代わりとなる記憶デバイス126を備えている。記憶デバイス126は、本明細書に論じる治療計画オペレーションを行う命令を記憶するのに使用される。
【0024】
一実施形態では、記憶デバイス126は、治療前に診断画像化システム110によって得られる患者の3D画像を記憶するデータベース152を備えている。これらの画像は、例えば患者のCT画像又は患者のMR画像である。治療計画システムは、放射線量計算及び/又は本明細書に論じる他の治療計画オペレーションのためにこれらの画像を使用することができる。
【0025】
一実施形態では、治療計画システム120は、以下により詳細に論じるように、治療の実施中に治療計画システム120による将来の使用のために1つ又は複数のアトラスを準備するアトラス処理モジュール136を備えている。一実施形態では、アトラス処理モジュール136はメモリ122内にあり、処理デバイス124による実行のために処理論理を含んでいる。別の実施形態では、アトラス処理モジュール136は、回路、専用論理、プログラム可能、論理、マイクロコードなどのハードウェアを備えた処理論理を含んでいる。さらに別の実施形態では、アトラス処理モジュール136は、ソフトウェアとハードウェアの組合せを備えた処理論理を含んでいる。
【0026】
治療計画システム120は、治療計画システム120より多くの構成部品又は少ない構成部品を備えることができ、本発明で利用することができる、多くの異なる構成や構造を有することができる治療計画システムの一例のみを示していることが分かるであろう。例えば、いくつかのシステムはしばしば、周辺バス、専用キャッシュ・バスなどの多数のバスを有する。治療計画システム120はまた、DICOMインポートをサポートするようにMIRIT(医療画像レビュー及びインポート・ツール)(それによって、画像を融合することができ、ターゲットを異なるシステム上に描くことができ、その後計画及び用量計算のために治療計画システム内にインポートすることができる)、及びユーザが治療計画を立て、様々な画像化モダリティ(例えば、MRI、CT、PETなど)のいずれか1つでの用量分布を見ることが可能になる拡張画像融合能力を備えることができる。
【0027】
治療計画システム120はそのデータベース152を治療実施システム140などの治療実施システムと共有することができ、それによって治療実施前に治療計画システムからエクスポートする必要がない可能性がある。治療計画システム120は、データ・リンク118に関して上で論じたように直接リンク、LANリンク、又はWANリンクなどであるデータ・リンク134を介して治療実施システム140にリンクされる。データ・リンク118、134がLAN又はWAN接続として実施される場合、診断画像化システム110、治療計画システム120、及び/又は治療実施システム140のいずれかはシステムが互いに物理的に離れることができるような分散位置にあってもよいことに留意すべきである。別の方法では、診断画像化システム110、治療計画システム120、及び/又は治療実施システム140のいずれかは1つ又は複数のシステム内で互いに一体化することができる。
【0028】
治療実施システム140は、治療計画と一致するようにターゲット用量に所定の放射線量を投与する治療用及び/又は手術用放射線源142を備えている。治療実施システム140はまた、患者を放射線源に対して位置決めするために、上に記載した診断画像との位置合わせ又は相関関係に対して患者のボリューム(ターゲット・ボリュームを含む)の治療中画像を捕捉する画像化システム144を備えている。治療実施システム140はまた、放射線源142を制御するデジタル処理システム146と、画像化システム144と、治療カウチ148などの患者サポート・デバイスとを備えている。デジタル処理システム146は、1つ又は複数の汎用プロセッサ(例えば、マイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又はコントローラ又はフィールド・プログラム可能ゲート・アレイ(FPGA)などの他のタイプのデバイスを含むことができる。デジタル処理システム146はまた、メモリ、記憶デバイス、ネットワーク・アダプタなどの他の構成部品(図示せず)も備えることができる。デジタル処理システム146は、バス150又は他のタイプの制御及び通信インターフェイスによって、放射線源142、画像化システム144、治療カウチ148に結合される。
【0029】
一実施形態では、治療実施システム120は、治療実施中に患者の位置と配向をトラッキングする患者トラッキング・モジュール154を備えている。以下により詳細に論じるように、患者トラッキング・モジュール154は、アトラス処理モジュール136によって準備され、データベース152内に記憶された1つ又は複数のアトラスを使用して患者をトラッキングすることができる。一実施形態では、患者トラッキング・モジュール154は、デジタル処理システム146のメモリ内にあり、デジタル処理システム146上で運用される処理論理を含んでいる。別の実施形態では、患者トラッキング・モジュール154は、回路、専用論理、プログラム可能、論理、マイクロコードなどのハードウェアを備えた処理論理を含んでいる。さらに別の実施形態では、患者トラッキング・モジュール154は、ソフトウェアとハードウェアの組合せを備えた処理論理を含んでいる。
【0030】
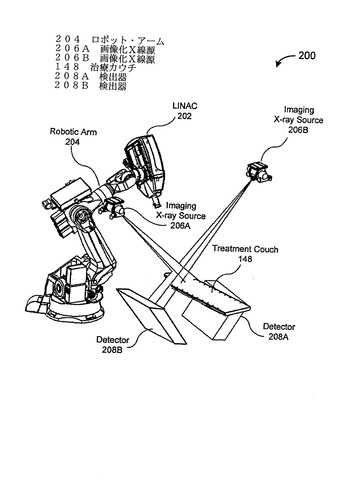
一実施形態では、図2に示すように、治療実施システム140は、カリフォルニアのAccuray,Incによって開発されたCyberKnife(登録商標)システムなどの画像ガイド・ロボット・ベース放射線治療システム200(例えば、放射線外科手術を行う)である。図2では、放射線源142は、患者の周りの手術ボリューム(例えば、球体)内に多くの角度から照射されるビームで、病理解剖学的構造(ターゲット領域又はターゲット・ボリューム)を放射するようにLINAC202を位置決めするために、多数の(例えば、5つ以上の)自由度を有するロボット・アーム204の端部に取り付けられた直線加速装置(LINAC)202を代表している。治療は、単一のアイソセンタ(収束点)、多数のアイソセンタ、又は非アイソセントリック・アプローチ(すなわち、ビームは病理的ターゲット・ボリュームと交差する必要があるだけであり、必ずしもターゲット内で単一の点又はアイソセンタ上に収束しない)を備えたビーム経路が必要である。治療は、治療計画中に判断したように、単一のセッション(単分割)、又は小数のセッション(低分割)のいずれかで行うことができる。治療実施システム200で、一実施形態では、放射線ビームは、手術前治療計画段階中に、ターゲット・ボリュームの位置に、ターゲット・ボリュームの手術中位置を位置合わせするために、患者を剛性外部フレームに固定することなく、治療計画にしたがって照射される。
【0031】
図2では、画像化システム144は、X線源206A、206Bと、X線画像検出器(撮像装置)208A、208Bで代表されている。一実施形態では、例えば、2つのX線源206A、206Bは、2つの異なる角度位置(例えば、90度、45度など離れて)から患者を通して画像化X線ビームを放射するように名目的に整列させられ、それぞれの検出器208A、208Bに向かって治療カウチ148上の患者を通して向けられている。別の実施形態では、各X線画像化源によって照明される単一の大きな検出器を使用することができる。別の方法では、他の数及び構成の画像化源及び検出器を使用することもできる。
【0032】
デジタル処理システム146は、治療カウチ148上の患者を、治療実施システム200内で整列させるために、かつ、ターゲット・ボリュームに対する放射線源を正確に位置決めするために、手術前治療計画画像と画像化システム144から得られる画像を位置合わせするアルゴリズムを実施することができる。
【0033】
治療カウチ148は、多数の(例えば、5つ以上の)自由度を有する別のロボット・アーム(図示せず)に結合させることができる。カウチ・アームは、5つの回転と平行移動の自由度、及び1つのほぼ垂直直線自由度を有する。別の方法では、カウチ・アームは、6つの回転と平行移動の自由度、及び1つのほぼ垂直直線自由度、又は少なくとも4つの回転と平行移動の自由度を有する。カウチ・アームは、支柱又は壁面に垂直に取り付ける、又は台座、床面、又は天井に水平に取り付けることができる。別の方法では、治療カウチ148は、カリフォルニアのAccuray,Incによって開発されたAxum(登録商標)治療カウチなどの別の機械的機構の構成部品、又は当業者に知られている他のタイプの従来の治療テーブルであってもよい。
【0034】
別の方法では、治療実施システム200は、別のタイプの治療実施システム、例えばガントリ・ベース(アイソセントリック)強度変調放射線治療(IMRT)システムであってもよい。ガントリ・ベース・システムでは、放射線源(例えば、LINAC)は、患者の軸方向スライスに対応する平面で回転するようにガントリに取り付けられている。放射線はその後、円形回転平面上でいくつかの位置から運ばれる。IMRTでは、放射線ビームの形状は、ビームの一部をブロックすることを可能にする多葉コリメータによって規定され、それによって患者に入射する残りのビームは所定の形状を有する。得られるシステムは、ターゲットに用量分布で照射するようにアイソセンタで互いに交差する任意の形状の放射線ビームを生成する。IMRT計画では、最適化アルゴリズムは主なビームのサブセットを選択し、患者が各サブセットに曝されるべき時間を判断し、それによって所定の用量制約が最適に満たされる。
【0035】
他の実施形態では、さらに別のタイプの治療実施システム200、例えばスウェーデンのElektaから市販されているGammaKnife(登録商標)などの定位フレーム・システムを使用することができる。このようなシステムでは、治療計画の最適化アルゴリズム(球体包装アルゴリズムとも呼ばれる)は、提供された用量制約を最もよく満たすために、アイソセンタを形成するビームのグループに割り当てられた選択と用量重み付けとを判断する。
【0036】
本明細書に記載した方法及び装置は、医療診断画像化及び治療でのみの使用に限るものではないことに留意すべきである。代替実施形態では、本明細書の方法及び装置は、材料の産業的画像化及び非崩壊検査(例えば、自動車産業のモータ・ブロック、航空産業の機体、建設産業の溶接部、石油産業のドリル・コア)、地震探査などの医療技術分野の他の応用例で使用することもできる。このような応用例では、例えば、「治療」は全体的に(1つ又は複数の)放射線ビームの適用のことを言うことができる。
【0037】
また図1を参照すると、上に論じたように、治療計画システム120は、治療実施システム140による将来の使用のために1つ又は複数のアトラスを準備するアトラス処理モジュール136を備えている。アトラスとしては、手術前画像化モダリティのアトラス(例えば、CTアトラス)や、手術中画像化モダリティの対応するアトラス(例えば、超音波アトラス)を挙げることができる。例えば、CTアトラスや超音波アトラスは、CTスキャンの座標空間が超音波スキャンのものに対して較正される較正ステップを最初に行うことによって作り出すことができる。これを行う1つの方法は、CTと超音波の両方で見える知られている幾何形状の基準点を含むファントムのCTスキャンと超音波スキャンを行うことである。別の方法は、CTスキャナに対して知られている配向及び位置で超音波スキャナを取り付けることである。次に例えば、診断画像化システム110は、CTアトラスを作り出すために任意の患者のCTスキャンを、その後、超音波アトラスを作り出すために、患者を移動させることなく同じ患者の超音波スキャンを行うことができる。別の方法では、診断画像化システム110は、超音波アトラスを作り出すために任意の患者の超音波スキャンを、その後、CTアトラスを作り出すために、患者を移動させることなく同じ患者のCTスキャンを行うことができる。一実施形態では、アトラス処理モジュール136は、治療実施システム140による将来の使用のために、データベース152内に両方のアトラスを記憶する。
【0038】
別の実施形態では、アトラス処理モジュール136は、上記の2つのアトラスから組み合わせてアトラスを作り出し、治療実施システム140による将来の使用のためにデータベース152内に組み合わせたアトラスを記憶する。一実施形態では、アトラス処理モジュール136は、第1のアトラスを第2のアトラスに重ねることによって組み合わせたアトラスを作り出す。例えば、アトラス処理モジュール136は、CTアトラス上のCTデータに超音波アトラスからの超音波データをマッピングし、その後、マッピングに基づきCTアトラスに超音波データを加えることができる。別の方法では、アトラス処理モジュール136は、超音波アトラス上の超音波データにCTアトラスからのCTデータをマッピングし、その後、マッピングに基づき超音波アトラスにCTデータを加えることができる。別の実施形態では、アトラス処理モジュール136は、同じ空間内で2つのアトラスを(例えば、CT/超音波スキャナを使用して)取得することによって、又は当技術分野で知られている技術を使用して第1のアトラスを第2のアトラスに位置合わせすることになどによって、他の方法で組み合わせたアトラスを作り出すことができる。
【0039】
別の実施形態では、アトラス処理モジュール136は、組み合わせたアトラスを作り出すために単一のアトラスを使用する。例えば、アトラス処理モジュール136は、データベース152内に記憶されたCT画像からCTアトラス(例えば、任意の患者のCT画像)を選択する。その後、解剖学的器官をCTアトラス上に描写する。描写は手動で、又は強度ベース方法、形状ベース方法、又はその両方などの自動セグメンテーション・ツールによる援助で行うことができる。次に、超音波強度をアトラスに加える。各器官に対する超音波強度は、ユーザによって手動で判断する、又は解剖学的器官に対する普通の超音波強度分布を与えるデータベース内に記憶されたテーブルから取ることができる。別の方法では、アトラス処理モジュール136は、データベース152内に記憶された超音波画像から超音波アトラス(例えば、任意の患者の超音波画像)を選択し、上記方法を使用して超音波アトラス内の位置に対して対応するCTデータを判断し、その後、これらの対応するCTデータを超音波アトラスに加える。初期アトラス(例えば、CTアトラス又は超音波アトラス)は、ユーザによって提供される患者のパラメータ(例えば、構造の相対的位置及び形状に関して実質的に通常の解剖学的構造を備えた患者に対するパラメータ)に基づき選択することができる。別の方法では、初期アトラスは、多数の患者の画像を選択し、これらを平均的な患者に関する単一の画像に構成することによって作り出すことができる。
【0040】
一実施形態では、組み合わせたアトラスがいったん作り出され、異なる患者に使用される。別の実施形態では、組み合わせたアトラスは各患者用に作り出すことができる。さらに別の実施形態では、組み合わせたアトラスは各治療実施の前に再び作り出すことができる。
【0041】
上に論じるように、一実施形態では、アトラス処理モジュール136は、治療実施システム140による将来の使用のために、データベース152内に組み合わせたアトラスを記憶する。代替実施形態では、アトラス処理モジュール136は、将来の治療実施中の計算を簡単にするように、組み合わせたアトラスに対して追加の処理を行う。特に、一実施形態では、アトラス処理モジュール136は、組み合わせたアトラス上の手術前モダリティ・データ(例えば、CTデータ)を使用して、組み合わせたアトラスとの手術前モダリティ画像(例えば、放射線量計算に使用されるCT画像)の変形可能な位置合わせを行う。この位置合わせに関連するデータは、同じモダリティに関連しており、したがって、この位置合わせは計算的には強くない。この位置合わせの結果は、手術前モダリティ画像(例えば、CT画像)にアトラス上の手術前モダリティ・データ(例えば、CTデータ)を一致させるように変形された組み合わせたアトラスである。アトラス処理モジュール136はその後、治療実施システム140による将来の使用のために、データベース152内に変形させたアトラスを記憶する。
【0042】
上に論じるように、治療実施システム140は、治療実施中に患者の位置と配向をトラッキングする患者トラッキング・モジュール154を備えることができる。放射線源のパラメータを調節することによって、小さな変化に対応することができる。大きな変化は、患者が再位置決めされている間、治療における中断が必要である。
【0043】
患者トラッキング・モジュール154は、治療計画のために使用された治療前画像(例えば、手術前CTスキャン)での治療中に得られる画像を位置合わせすることによって、患者の位置と配向の測定を行う。手術中画像は、放射線に対する患者の追加の被曝が必要ない画像化モダリティを使用して、画像化システム144によって得られる。このようなモダリティは例えば、超音波スキャン又はMRスキャンなどである。一実施形態では、手術前モダリティや手術中モダリティは、2つの異なるタイプ(例えば、手術前CTスキャンと手術中超音波スキャン)である。その後、変形可能な位置合わせは困難な問題を示す可能性がある。患者トラッキング・モジュール154は、仮想画像を使用してこの問題を解消する。特に一実施形態では、患者トラッキング・モジュール154は、治療計画システム120によって処理され、データベース152内に記憶されたアトラスを使用する。一実施形態では、このアトラスは手術前モダリティのデータと、手術中モダリティのデータとを含む組み合わせたアトラスである。組み合わせたアトラスは例えば、その上に超音波情報が描かれたCTアトラスであってもよく、それによってCTアトラス内の全ての位置は対応する超音波強度を有する。別の方法では、このアトラスは、その上に対応するCT情報が描かれた超音波アトラスであってもよい。別の実施形態では、患者トラッキング・モジュール154は、データベース152から2つのアトラス(例えば、CTアトラス及び超音波アトラス)を取り出し、以下に論じる方法で組み合わせたアトラスを作る。
【0044】
一実施形態では、患者トラッキング・モジュール154は、一連の変形可能な位置合わせを行うことによって、手術前画像を手術中画像に位置合わせする。より詳細には、患者トラッキング・モジュール154は最初に、アトラス上の手術前データを使用して組み合わせたアトラスとの手術前画像の変形可能な位置合わせを行い、その後、アトラス上の手術中データを使用して手術中画像との組み合わせたアトラスの変形可能な位置合わせを行う。これらの変形可能な位置合わせは、イントラモダリティ位置合わせであり、したがって集中的な計算は必要ない。得られる変形した手術中画像は、手術前画像が得られた時の患者の位置と配向と比べた際の、患者の位置と配向の変化を示している。
【0045】
別の実施形態では、組み合わせたアトラスとの手術前画像の位置合わせは、上に論じたように、共有されるデータベース152内に得られた変形させたアトラスを記憶する治療計画システム120による治療前に行われる。その後、患者トラッキング・モジュール154は、データベース152から変形させたアトラスを取り出し、その後、アトラス上の手術中データを使用して手術中画像とこのアトラスを位置合わせする。
【0046】
さらに別の実施形態では、患者トラッキング・モジュール154は、アトラス上の手術中データを使用して、組み合わせたアトラスと手術中画像を最初に位置合わせし、その後、組み合わせたアトラスを手術前画像と位置合わせすることによって、逆の順序で一連の変形可能な位置合わせを行う。得られた変形させた手術前画像はその後、患者の位置と配向の変化を示している。
【0047】
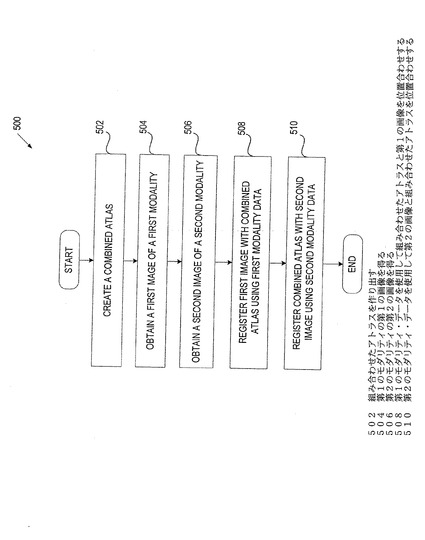
図3は、異なる画像化モダリティ・タイプの画像を変形可能に位置合わせする過程500の一実施形態の流れ図である。過程は、アトラス処理モジュール136の処理論理、及び/又は患者トラッキング・モジュール154の処理論理によって行うことができる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。
【0048】
図3を参照すると、処理論理は、異なるモダリティの2つのアトラス(例えば、CTアトラス及び超音波アトラス)から組み合わせたアトラスを作り出す処理論理で開始する(処理ブロック502)。一実施形態では、処理論理は、第1のアトラスからのデータを第2のアトラス内のデータにマッピングし、その後、マッピングを使用して第1のアトラスからの第1のモダリティ・データを第2のアトラス上に重ね合わせることによって、組み合わせたアトラスを作り出す。例えば、処理論理は、超音波アトラスからの超音波データをCTアトラス上のCTデータにマッピングし、その後、マッピングに基づき、超音波データをCTアトラスに加える。別の方法では、処理論理は、任意の患者の第1のモダリティ画像を選択し、画像内の第1のモダリティ・データに対応する第2のモダリティ・データを自動的に判断し、第1のモダリティ画像に第2のモダリティ・データを加えることによって、組み合わせたアトラスを作る。
【0049】
一実施形態では、組み合わせたアトラスがいったん作られ、全ての患者用に使用される。別の実施形態では、組み合わせたアトラスは各患者用に作られる。さらに別の実施形態では、組み合わせたアトラスは各治療実施前に再び作り出す。
【0050】
処理ブロック504では、処理論理は患者の第1のモダリティ画像(例えば、CT画像)を得る。一実施形態では、第1のモダリティ画像は、治療実施前に治療計画を開発するように、データベース152から取り出される。
【0051】
処理ブロック506では、処理論理は患者の第2のモダリティ画像(例えば、超音波画像)を得る。第1と第2のモダリティは、2つの異なるタイプである。一実施形態では、第2のモダリティ画像は治療実施中に得られる。
【0052】
次に、処理論理は、一連の変形可能な位置合わせを使用して、第1のモダリティ画像を第2のモダリティ画像と位置合わせする。特に処理ブロック508では、処理論理は、組み合わせたアトラス上の第1のモダリティ・データを使用して、組み合わせたアトラスとの第1のモダリティ画像の変形可能な位置合わせを行う。一実施形態では、この変形可能な位置合わせは治療実施前に行われる。別の方法では、治療実施中に行われる。
【0053】
処理ブロック510では、処理論理は、処理ブロック508で変形された組み合わせたアトラスの第2のモダリティ画像との変形可能な位置合わせを行う。これらの変形可能な位置合わせはそれぞれ、集中的な計算が必要ないイントラモダリティ変換が必要である。組み合わせたアトラスに一致するように変形された得られた第2のモダリティ画像は、患者の位置と配向の変化を示している。
【0054】
一実施形態では、第1のモダリティ画像は手術前CT画像であり、第2のモダリティ画像は手術中超音波画像であり、位置合わせ過程は、治療計画段階と治療実施段階の2段階に分割される。
【0055】
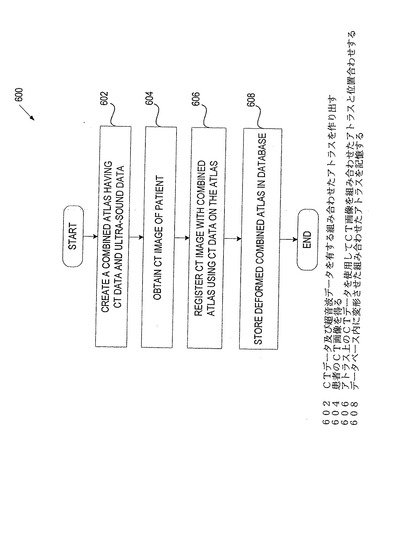
図4は、画像位置合わせの治療計画段階を行う過程600の一実施形態の流れ図である。過程は、アトラス処理モジュール136の処理論理によって行うことができる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。
【0056】
図4を参照すると、過程600は、CTデータと超音波データを有する組み合わせたアトラスを作り出す処理論理で開始する(処理ブロック602)。一実施形態では、組み合わせたアトラスは超音波データが描かれたCTアトラスであり、それによってCTアトラス内の全ての位置は対応する超音波強度を有する。別の方法では、組み合わせたアトラスは、対応するCTデータが描かれた超音波アトラスである。
【0057】
処理ブロック604では、処理論理は患者のCT画像を得る。CT画像は、ターゲットを特定し、放射線量を計算するために得られる。
【0058】
処理ブロック606では、処理論理は、アトラス上のCTデータを使用して、組み合わせたアトラスとのCT画像の変形可能な位置合わせを行う。
【0059】
処理ブロック608では、処理論理は、データベース内に処理ブロック606で変形された組み合わせたアトラスを記憶する。
【0060】
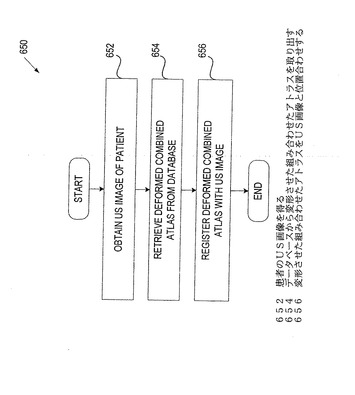
図5は、画像位置合わせの治療実施段階を行う過程650の一実施形態の流れ図である。過程は、患者トラッキング・モジュール154の処理論理によって行われる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。
【0061】
図5を参照すると、過程650は、治療実施中に患者の超音波画像を得る処理論理で開始する(処理ブロック652)。
【0062】
処理ブロック654では、処理論理は、手術前CT画像に一致するように前に変形させた、組み合わせたアトラスをデータベースから取り出す。
【0063】
処理ブロック656では、処理論理は、アトラス上の超音波データを使用して、超音波画像との取り出したアトラスの変形可能な位置合わせを行う。アトラス上の超音波データに一致するように変形された超音波画像は、患者の位置と配向の変化を示している。
【0064】
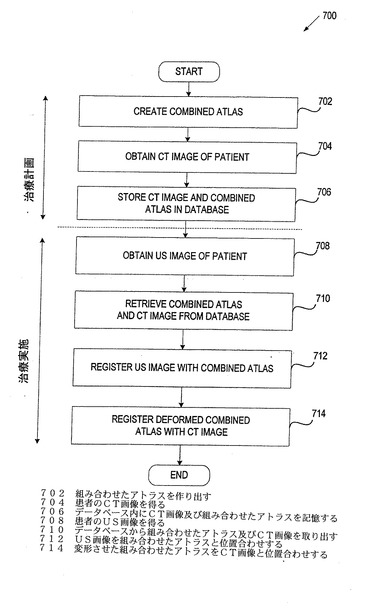
代替実施形態では、一連の変形可能な位置合わせを逆の順序で行うことができる。図6は、異なるモダリティ・タイプの画像を変形可能に位置合わせする過程700の代替実施形態の流れ図である。過程は、アトラス処理モジュール136の処理論理、及び患者トラッキング・モジュール154の処理論理によって行うことができる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。一実施形態では、過程700は図1のシステム100によって行われる。
【0065】
図6を参照すると、処理論理は組み合わせたアトラスを作り出す処理論理で開始する(処理ブロック702)。一実施形態では、組み合わせたアトラスは、その上に超音波データが描かれたCTアトラスであり、それによってCTアトラス内の全ての位置は対応する超音波強度を有する。別の方法では、組み合わせたアトラスは、その上に対応するCTデータが描かれた超音波アトラスである。
【0066】
次に、処理論理は、治療計画における使用のために治療の前に、患者のCT画像を得て(処理ブロック704)、データベース内にCT画像と組み合わせたアトラスを記憶する。
【0067】
一実施形態では、処理論理は治療計画中にブロック702から706までを行う。
【0068】
処理ブロック708では、処理論理は、治療実施中に患者の超音波画像を得る。
【0069】
処理ブロック710では、処理論理は、データベースから組み合わせたアトラス、及び患者の手術前CT画像を取り出す。
【0070】
さらに、処理論理は、アトラス上の超音波データを使用して組み合わせたアトラスとの超音波画像の変形可能な位置合わせを最初に行い(処理ブロック712)、その後アトラス上のCTデータを使用してCT画像との組み合わせたアトラスの変形可能な位置合わせを行うことによって(処理ブロック714)、患者の手術中超音波画像と患者の手術前CT画像を位置合わせする。
【0071】
一実施形態では、処理論理は治療実施中に、ブロック708から714を行う。
【0072】
図7は、変形可能な位置合わせ過程の一実施形態で使用される例示的な画像を示している。
【0073】
図7を参照すると、画像802は、解剖学的構造806を含む手術前CT画像である。三角形804は、現在の患者の身体の形状を示している。
【0074】
画像808は、解剖学的構造812を含むCTアトラスである。上に論じるように、CTアトラスは、この又は何人かの他の患者の既存のCT画像であってもよい。患者及び/又は患者の位置は、CT画像802に関連するものと異なるので、三角形810は三角形804と異なる。矢印を有する曲線は、CT画像802上のデータと一致するような、CTアトラス808の変形を示している。
【0075】
アトラス814は、対応する超音波情報が描かれたCTアトラス808を表す。図示するように、アトラス808、814は共通のデータ(解剖学的構造812、818)と、アトラス808内には存在しないいくつかの超音波特有データ(解剖学的構造816)を含んでいる。アトラス808からアトラス814までの矢印を有する曲線は、2つのアトラス間のデータのマッピングを示している。
【0076】
アトラス808は、例示的な目的でのみ示されており、位置合わせ過程の中にある必要ない可能性があることに留意すべきである。すなわち、CT画像802は、アトラス814と直接位置合わせすることができる。
【0077】
画像822は、アトラス814と同じ解剖学的構造を有する手術中超音波画像である。患者の身体の形状は、三角形826によって示される。アトラス814から超音波画像822までの矢印を有する曲線は、アトラス814上のデータと一致するように画像822の変形を示している。超音波画像822上の得られる変化は、手術前CT画像802上に反映される患者の位置と配向と比べた際の、患者の位置と配向の変化を示している。
【0078】
前述の明細書では、本発明の実施形態をその特定の例示的な実施形態を参照して記載した。しかし、特許請求の範囲に記載したような本実施形態のより広い精神及び範囲から逸脱することなく、様々な変形及び変更をこれに加えることができることが明らかであろう。したがって、明細書及び図面は、限定的な意味ではなく、例示的なものとして解釈するものとする。
【図面の簡単な説明】
【0079】
【図1】本発明の特性を実施することができる、放射線治療を行う際に使用することができるシステムの一実施形態を示す図である。
【図2】画像ガイド・ロボット・ベース放射線治療システムの一実施形態を示す図である。
【図3】異なるモダリティ・タイプの画像を位置合わせする過程の一実施形態の流れ図である。
【図4】画像位置合わせの治療計画段階を行う過程の一実施形態の流れ図である。
【図5】画像位置合わせの治療実施段階を行う過程の一実施形態の流れ図である。
【図6】異なるモダリティ・タイプの画像を位置合わせする過程の代替実施形態の流れ図である。
【図7】変形可能な位置合わせ過程の一実施形態で使用される例示的な画像を示す図である。
【技術分野】
【0001】
本発明の実施形態は、放射線治療の分野に関し、より詳細には、放射線治療中の患者トラッキングに関する。
【背景技術】
【0002】
放射線外科手術は、病理学の腫瘍又は病巣部位を崩壊させるために、単分割治療又は低分割治療において高用量のイオン化放射線を照射する低侵襲性処置である。放射線量は、側副器官に対する損傷を少なくしながら、腫瘍の形状に最適に合わせなければならない。ターゲットの病巣やその周辺の発症組織の識別は普通、手術前病巣識別段階中に、患者の基準フレームに関する三次元(3D)空間内で行われる。手術前計画段階中に、隣接する健康な組織に照射される用量を最小限に抑えながら、適合用量がターゲットの周りに刻まれる。これは、その相対的な重さ又は線量の寄与がそれに応じた用量を、容量的に形成するような尺度にされたビーム位置の組合せを使用して達成することができる。演繹的計画として知られるモデルでは、ユーザは様々なビームの所望の重さを手動で特定する。帰納的計画方法は、ターゲット組織と健康な組織に対するユーザが決めた用量制約に基づき、ビームと重さの最適な組合せを自動的に計算するアルゴリズムを利用する。
【0003】
腫瘍治療の別の方法は、外部ビーム放射線治療である。1つのタイプの外部ビーム放射線治療では、外部放射線源は多数の角度からの腫瘍部位にX線ビームのシーケンスを案内するのに使用され、患者は腫瘍がビームの回転の中心(アイソセンタ)にあるように位置決めされている。放射線源の角度が変えられて、全てのビームが腫瘍部位を通過し、腫瘍への途中で健康な組織の異なる領域を通過する。その結果、腫瘍における累積放射線量は高く、健康な組織への平均放射線量は低い。放射線治療セッションで利用される放射線量は普通、放射線外科手術セッションで使用される量と比べて、ある程度ほぼ小さい。放射線治療は普通、治療毎の低用量(例えば、100〜200センチグレイ(cGy))、短い治療時間(例えば、治療毎に10から30分)、過分割照射法(例えば、30から45日の治療)を特徴としている。便宜上、「放射線治療」という用語は本明細書では、放射線の量によりそうでないと記されない限り、放射線外科治療及び/又は放射線治療のことを意味するのに使用される。
【0004】
放射線治療中、患者は自分の位置又は向きを変えることができる。加えて、病理解剖学的構造(例えば、腫瘍、病巣、脈管奇形など)は、治療中に移動し、正確なターゲット集中(すなわち、ターゲットの位置の正確なトラッキング)を低下させることがある。最も顕著には、軟組織ターゲットは、放射線外科治療実施セッション中に患者の呼吸で移動する。呼吸運動によって、例えば3センチ(cm)より大きい、胸部又は腹部の腫瘍が移動する。放射線治療では、治療されている病理解剖学的構造への放射線ビームの正確な照射が、治療計画段階中に計算された放射線量分布を達成するために、重要である。
【発明の開示】
【課題を解決するための手段】
【0005】
ターゲットのトラッキング動作に対する従来の一解決法は、患者の外側(例えば、皮膚)に配置された外部マーカ(例えば、赤外線放射装置)を利用する。可視光線(例えば、赤外線)トラッキングシステムを使用して外部マーカが自動的にトラッキングされる。しかし、外部マーカでは、呼吸動作によって生じる内部変位を適切に反映させることができない。大きな外部患者動作が、極めて小さい内部移動と共に生じることがある。例えば、内部ターゲットは皮膚表面よりはるかにゆっくり移動する。
【0006】
ターゲットのトラッキング動作に対する別の従来の解決法は、移植した基準の使用が必要である。普通、放射線不透過性基準マーカ(例えば、金種、又はステンレス鋼ねじ)が、治療の前にターゲット器官に近接して、又はその中に移植され、治療実施中に基準点として使用される。ステレオX線画像化は、これらの基準マーカの正確な空間的位置を算出するために治療中に使用される(例えば、10秒毎に1回)。しかし、内部マーカだけでは正確なトラッキングには十分でない。さらに、内部基準マーカのトラッキングは患者にとって難しい可能性がある。というのは、骨に移植した基準マーカを使用して高精度が得られる傾向があるからである。骨への基準マーカの移植は、特に頸椎に対して難しく痛みを伴う侵襲性処置が必要であり、頻繁に臨床的合併症につながることがある。加えて、骨に移植した基準マーカのトラッキングによりさらに、軟組織ターゲットの移動又は変形に対する正確な結果が与えられないことがある。さらに、基準マーカが骨に移植されるか、又はコンピュータ断層撮影(CT)監視によりターゲット領域の近くで軟組織内に生検針を通して注入されるかどうかに関わらず、患者はさらに放射線治療の前にこのような侵襲性処理を受けなければならない。
【0007】
移植した基準マーカを使用することなく腫瘍の移動をトラッキングする従来の技術が、A.Schweikard,H Shiomi,J.Adler、Respiration Tracking in Radiosurgery Without Fiducials、Int J Medical Robotics and Computer Assisted Surgery、2005年1月、19〜27ページに記載されている。記載されている基準のないトラッキング技術は、画像位置合わせ法を使用する。これらの方法は、関連する変換の性質によって異なる可能性がある。より詳細には、変換は剛性又は変形可能である。剛性変換(例えば、頭の画像に対する)は普通平行移動と回転を可能にするだけであるが、変形可能な変換は明らかにより複雑な問題を解決することが必要である。
【0008】
画像位置合わせ方法は、単モーダル(又は、イントラモダリティ)位置合わせと多モーダル(又は、インターモダリティ)位置合わせに分割することができる。単モーダル応用例では、位置合わせされる画像は、位置合わせされる画像が異なるモダリティから生じる多モーダル応用例と反対に、同じモダリティに属している。同じモダリティの画像間の高程度の類似性により、単モーダル位置合わせを解決することは普通、特に変形可能な変換では、多モダリティ応用例よりある程度簡単である。
【0009】
放射線治療中に患者の位置及び向きを測定する既存の解決法は、治療前CTスキャンでの治療中に撮られた放射X線を位置合わせすることが必要である。しかし、X線は患者に追加の放射線被曝なしでしばしば撮ることができないのでこの方法は限られている。さらに、ターゲット領域の近くで基準マーカを移植することなく、X線上で軟組織器官(例えば、肺)をトラッキングすることが難しい。
【発明を実施するための最良の形態】
【0010】
本発明の実施形態は、添付の図面に限定ではなく、例として示されている。
【0011】
以下の説明では、本実施形態の完全な理解を行うために、特定の構成部品例、デバイス例、方法例などの多くの特定の詳細が記載されている。しかし、これらの特定の詳細は本実施形態を実行するのに利用する必要がないことは当業者には明らかである。他の例では、よく知られている材料又は方法は、本実施形態を不必要に不明瞭にするのを避けるために、詳細には記載されていない。
【0012】
本明細書で使用される「結合された」という用語は、1つ又は複数の介在構成部品を通して直接又は間接的に結合されることを意味する。本明細書に記載した様々なバス上に与えられた信号のいずれかは、他の信号で時間分割多重化し、1つ又は複数の共通バス上に提供することができる。加えて、回路構成部品又はブロック間の相互接続は、バス又は単信号ラインとして示すことができる。各バスは別の方法では、1つ又は複数の単信号ラインであってもよく、単信号ラインはそれぞれ別の方法ではバスであってもよい。本明細書で使用されるような「第1の」、「第2の」、「第3の」、「第4の」などの用語は、異なる要素間で区別するラベルとして示され、その数字の表示に応じた順序的意味を必ずしも有しない。
【0013】
そうでないと特に記されていない限り、以下の議論から明らかなように、明細書全体を通して、「処理する」、又は「算出する」、又は「計算する」、又は「測定する」などの用語を利用した議論は、コンピュータ・システムのレジスタ及びメモリ内で物理(電子)量として示されたデータを、コンピュータ・システム・メモリ又はレジスタ又は他のこのような情報記憶、伝達又は表示デバイス内で物理量として同様に示された他のデータにオペレーション及び変換する、コンピュータ・システム、又は同様の電子計算デバイスの動作や過程のことを言うということが理解されるであろう。本明細書に記載した方法の実施形態は、コンピュータ・ソフトウェアを使用して実施することができる。認められた基準に適合するプログラミング言語で書かれた場合、方法を実施するように設計された命令のシーケンスを様々なハードウェア・プラットフォーム上での実行のために、また様々なオペレーティング・システムへのインターフェイスのためにコンパイルすることができる。加えて、本発明の実施形態はあらゆる特定のプログラミング言語を参照して説明しない。様々なプログラミング言語が、本明細書に記載するように本発明の実施形態を実施するために使用することができる。
【0014】
仮想画像を使用して放射線治療中に患者をトラッキングするための方法とシステムが、記載されている。「放射線治療」という用語は本明細書では、放射線の量によってそうでないと記されていない限り、放射線外科手術及び/又は放射線治療のことを意味するために使用されている。本明細書で使用する「仮想画像」という用語は、アトラス、すなわち、構造の相対位置と形状の意味での実質的に通常の解剖学的構造を有する任意の患者の前に存在した画像、又は多数の患者の平均化画像のことを言う。
【0015】
治療計画中に、所要の放射線量は、手術前画像(例えば、コンピュータ断層撮影(CT)画像、磁気共鳴(MR)画像、又は誘導MRI/CT)を使用して測定される。治療実施中に、患者の現在位置は、患者の手術中画像(例えば、超音波(US)画像、MR画像など)を使用して測定される。手術中画像と手術前画像は、2つの異なるタイプであってもよい。例えば、手術前画像はCT画像で、手術中画像はUS画像である。このような異なる画像の変形可能な位置合わせは、異なる問題を生じる。本発明の実施形態は、アトラスを使用して一連の変形可能な位置合わせを行うことによってこの問題を解消する。アトラスは例えば、その上に超音波情報が描かれたCTアトラスであってもよく、それによってCTアトラス中の全ての位置は対応する超音波強度を有する。手術前CT画像と手術中US画像の間の位置合わせは、一実施形態では、最初にアトラス内のCTデータを使用してCTアトラスとCT画像を位置合わせし、その後US画像とアトラス上の超音波データを位置合わせし、それによって患者の位置をトラッキングすることによって行うことができる。代替形態では、位置合わせは、最初にアトラス上の超音波データを使用してアトラスとUS画像を位置合わせし、その後アトラス上のCTデータを使用してCT画像とアトラスを位置合わせすることによって行うことができる。
【0016】
図1は、本発明の特性を実施することができる、放射線治療を行う際に使用することができるシステムの一実施形態を示している。以下に記載し、図1に示すように、システム100は、診断画像化システム110と、治療計画システム120と、治療実施システム140とを備えている。
【0017】
診断画像化システム110は、その後の医療診断、治療計画及び/又は治療実施に使用することができる、患者内の関心部分(VOI)の医療診断画像を生成することが可能なあらゆるシステムであってもよい。例えば、診断画像化システム110は、コンピュータ断層撮影(CT)システム、磁気共鳴画像化(MRI)システム、陽電子放出断層撮影(PET)システム、超音波システムなどである。議論を簡単にするため、診断画像化システム110は、CT画像化モダリティに関連して時に以下で論じることができる。しかし、上のものなどの他の画像化モダリティを使用することもできる。
【0018】
診断画像化システム110は、画像化ビーム(例えば、X線、超音波、高周波など)を生成する画像化源112、及び画像化源112によって生成されるビームを検出し受信する画像化検出器116、又は(例えば、MRI又はPETスキャンにおいて)画像化源からのビームによって刺激される二次ビーム又は放出を含んでいる。一実施形態では、診断画像化システム110は、2つ以上の診断X線源と、2つ以上の対応する画像化検出器を備えている。例えば、2つのX線源が、互いの角度間隔(例えば、90度、45度など)を固定して、画像化される患者の周りに配置され、X線源と反対側で対向させた(1つ又は複数の)画像化検出器に、患者を通して向けることができる。各X線画像化源によって照射される、単一の大きな画像化検出器か、あるいは多数の画像化検出器を使用することができる。別の方法では、他の数及び構成の画像化源及び画像化検出器を使用することができる。
【0019】
画像化源112と画像化検出器116は、画像化オペレーションを制御し、画像データを処理するようにデジタル処理システム114に結合される。診断画像化システム110は、デジタル処理システム114、画像化源112、画像化検出器116の間でデータとコマンドを伝達するバス又は他の手段102を備えている。デジタル処理システム114は、1つ又は複数の汎用プロセッサ(例えば、マイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又はコントローラ又はフィールド・プログラム可能ゲート・アレイ(FPGA)などの他のタイプのデバイスを含むことができる。デジタル処理システム114はまた、メモリ、記憶デバイス、ネットワーク・アダプタなどの他の構成部品(図示せず)を備えることができる。デジタル処理システム114は、例えばDICOM(医用におけるデジタル画像と通信)フォーマットなどの標準的フォーマットでデジタル診断画像を生成するように構成されている。他の実施形態では、デジタル処理システム114は他の基準的又は非基準的デジタル画像フォーマットを生成する。デジタル処理システム114は診断画像ファイル(例えば、上記DICOMフォーマット化ファイル)を、例えば、直接リンク、ローカル・エリア・ネットワーク(LAN)リンク、又はインターネットなどのワイド・エリア・ネットワーク(WAN)リンクなどであるデータ・リンク118上で治療計画システム120に伝達することができる。加えて、システム間で伝達される情報は、遠隔診断又は治療計画構成などで、システムを接続する通信媒体の間をプルされ又はプッシュされる。遠隔診断又は治療計画において、ユーザはシステム・ユーザと患者の間の物理的分離が存在するにも関わらず、診断又は治療計画に本発明の実施形態を利用することができる。
【0020】
治療計画システム120は、画像データを受信し処理する処理デバイス124を備えている。処理デバイス124は、1つ又は複数の汎用プロセッサ(例えば、マイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又はコントローラ又はフィールド・プログラム可能ゲート・アレイ(FPGA)などの他のタイプのデバイスの代わりにもなる。処理デバイス124は、本明細書に論じた治療計画オペレーションを行う命令を実行するように構成されている。
【0021】
治療計画システム120はまた、ランダム・アクセス・メモリ(RAM)を含むシステム・メモリ122、又は情報を記憶しかつ処理デバイス124によって実行される命令を記憶するために、バス128によって処理デバイス124に結合された他の動的記憶デバイスを備えることができる。システム・メモリ122は、同様に、処理デバイス124による命令の実行中に、一時変数又は他の中間情報を記憶するのに使用することができる。システム・メモリ122はまた、読取専用メモリ(ROM)、及び/又は処理デバイス124に対して静的情報と命令を記憶するためにバス128に結合された他の静的記憶デバイスを備えることができる。
【0022】
処理デバイス124はまた、ユーザに情報(例えば、VOIを示す2D又は3D)を表示するための、ブラウン管(CRT)又は液晶ディスプレイ(LCD)などの表示デバイス130に結合されている。キーボードなどの入力デバイス132が、情報及び/又はコマンド選択を処理デバイス124と通信するために、処理デバイス124に結合されている。1つ又は複数の他のユーザ入力デバイス(例えば、マウス、トラックボール、又はカーソル方向キー)も、処理デバイス124に対するコマンドを選択し、ディスプレイ130上のカーソル移動を制御するように、方向情報を通信するのに使用することができる。
【0023】
治療計画システム120はまた、情報と命令を記憶するために、バス128に結合された1つ又は複数の記憶デバイス(例えば、磁気ディスク・ドライブ又は光ディスク・ドライブ)の代わりとなる記憶デバイス126を備えている。記憶デバイス126は、本明細書に論じる治療計画オペレーションを行う命令を記憶するのに使用される。
【0024】
一実施形態では、記憶デバイス126は、治療前に診断画像化システム110によって得られる患者の3D画像を記憶するデータベース152を備えている。これらの画像は、例えば患者のCT画像又は患者のMR画像である。治療計画システムは、放射線量計算及び/又は本明細書に論じる他の治療計画オペレーションのためにこれらの画像を使用することができる。
【0025】
一実施形態では、治療計画システム120は、以下により詳細に論じるように、治療の実施中に治療計画システム120による将来の使用のために1つ又は複数のアトラスを準備するアトラス処理モジュール136を備えている。一実施形態では、アトラス処理モジュール136はメモリ122内にあり、処理デバイス124による実行のために処理論理を含んでいる。別の実施形態では、アトラス処理モジュール136は、回路、専用論理、プログラム可能、論理、マイクロコードなどのハードウェアを備えた処理論理を含んでいる。さらに別の実施形態では、アトラス処理モジュール136は、ソフトウェアとハードウェアの組合せを備えた処理論理を含んでいる。
【0026】
治療計画システム120は、治療計画システム120より多くの構成部品又は少ない構成部品を備えることができ、本発明で利用することができる、多くの異なる構成や構造を有することができる治療計画システムの一例のみを示していることが分かるであろう。例えば、いくつかのシステムはしばしば、周辺バス、専用キャッシュ・バスなどの多数のバスを有する。治療計画システム120はまた、DICOMインポートをサポートするようにMIRIT(医療画像レビュー及びインポート・ツール)(それによって、画像を融合することができ、ターゲットを異なるシステム上に描くことができ、その後計画及び用量計算のために治療計画システム内にインポートすることができる)、及びユーザが治療計画を立て、様々な画像化モダリティ(例えば、MRI、CT、PETなど)のいずれか1つでの用量分布を見ることが可能になる拡張画像融合能力を備えることができる。
【0027】
治療計画システム120はそのデータベース152を治療実施システム140などの治療実施システムと共有することができ、それによって治療実施前に治療計画システムからエクスポートする必要がない可能性がある。治療計画システム120は、データ・リンク118に関して上で論じたように直接リンク、LANリンク、又はWANリンクなどであるデータ・リンク134を介して治療実施システム140にリンクされる。データ・リンク118、134がLAN又はWAN接続として実施される場合、診断画像化システム110、治療計画システム120、及び/又は治療実施システム140のいずれかはシステムが互いに物理的に離れることができるような分散位置にあってもよいことに留意すべきである。別の方法では、診断画像化システム110、治療計画システム120、及び/又は治療実施システム140のいずれかは1つ又は複数のシステム内で互いに一体化することができる。
【0028】
治療実施システム140は、治療計画と一致するようにターゲット用量に所定の放射線量を投与する治療用及び/又は手術用放射線源142を備えている。治療実施システム140はまた、患者を放射線源に対して位置決めするために、上に記載した診断画像との位置合わせ又は相関関係に対して患者のボリューム(ターゲット・ボリュームを含む)の治療中画像を捕捉する画像化システム144を備えている。治療実施システム140はまた、放射線源142を制御するデジタル処理システム146と、画像化システム144と、治療カウチ148などの患者サポート・デバイスとを備えている。デジタル処理システム146は、1つ又は複数の汎用プロセッサ(例えば、マイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又はコントローラ又はフィールド・プログラム可能ゲート・アレイ(FPGA)などの他のタイプのデバイスを含むことができる。デジタル処理システム146はまた、メモリ、記憶デバイス、ネットワーク・アダプタなどの他の構成部品(図示せず)も備えることができる。デジタル処理システム146は、バス150又は他のタイプの制御及び通信インターフェイスによって、放射線源142、画像化システム144、治療カウチ148に結合される。
【0029】
一実施形態では、治療実施システム120は、治療実施中に患者の位置と配向をトラッキングする患者トラッキング・モジュール154を備えている。以下により詳細に論じるように、患者トラッキング・モジュール154は、アトラス処理モジュール136によって準備され、データベース152内に記憶された1つ又は複数のアトラスを使用して患者をトラッキングすることができる。一実施形態では、患者トラッキング・モジュール154は、デジタル処理システム146のメモリ内にあり、デジタル処理システム146上で運用される処理論理を含んでいる。別の実施形態では、患者トラッキング・モジュール154は、回路、専用論理、プログラム可能、論理、マイクロコードなどのハードウェアを備えた処理論理を含んでいる。さらに別の実施形態では、患者トラッキング・モジュール154は、ソフトウェアとハードウェアの組合せを備えた処理論理を含んでいる。
【0030】
一実施形態では、図2に示すように、治療実施システム140は、カリフォルニアのAccuray,Incによって開発されたCyberKnife(登録商標)システムなどの画像ガイド・ロボット・ベース放射線治療システム200(例えば、放射線外科手術を行う)である。図2では、放射線源142は、患者の周りの手術ボリューム(例えば、球体)内に多くの角度から照射されるビームで、病理解剖学的構造(ターゲット領域又はターゲット・ボリューム)を放射するようにLINAC202を位置決めするために、多数の(例えば、5つ以上の)自由度を有するロボット・アーム204の端部に取り付けられた直線加速装置(LINAC)202を代表している。治療は、単一のアイソセンタ(収束点)、多数のアイソセンタ、又は非アイソセントリック・アプローチ(すなわち、ビームは病理的ターゲット・ボリュームと交差する必要があるだけであり、必ずしもターゲット内で単一の点又はアイソセンタ上に収束しない)を備えたビーム経路が必要である。治療は、治療計画中に判断したように、単一のセッション(単分割)、又は小数のセッション(低分割)のいずれかで行うことができる。治療実施システム200で、一実施形態では、放射線ビームは、手術前治療計画段階中に、ターゲット・ボリュームの位置に、ターゲット・ボリュームの手術中位置を位置合わせするために、患者を剛性外部フレームに固定することなく、治療計画にしたがって照射される。
【0031】
図2では、画像化システム144は、X線源206A、206Bと、X線画像検出器(撮像装置)208A、208Bで代表されている。一実施形態では、例えば、2つのX線源206A、206Bは、2つの異なる角度位置(例えば、90度、45度など離れて)から患者を通して画像化X線ビームを放射するように名目的に整列させられ、それぞれの検出器208A、208Bに向かって治療カウチ148上の患者を通して向けられている。別の実施形態では、各X線画像化源によって照明される単一の大きな検出器を使用することができる。別の方法では、他の数及び構成の画像化源及び検出器を使用することもできる。
【0032】
デジタル処理システム146は、治療カウチ148上の患者を、治療実施システム200内で整列させるために、かつ、ターゲット・ボリュームに対する放射線源を正確に位置決めするために、手術前治療計画画像と画像化システム144から得られる画像を位置合わせするアルゴリズムを実施することができる。
【0033】
治療カウチ148は、多数の(例えば、5つ以上の)自由度を有する別のロボット・アーム(図示せず)に結合させることができる。カウチ・アームは、5つの回転と平行移動の自由度、及び1つのほぼ垂直直線自由度を有する。別の方法では、カウチ・アームは、6つの回転と平行移動の自由度、及び1つのほぼ垂直直線自由度、又は少なくとも4つの回転と平行移動の自由度を有する。カウチ・アームは、支柱又は壁面に垂直に取り付ける、又は台座、床面、又は天井に水平に取り付けることができる。別の方法では、治療カウチ148は、カリフォルニアのAccuray,Incによって開発されたAxum(登録商標)治療カウチなどの別の機械的機構の構成部品、又は当業者に知られている他のタイプの従来の治療テーブルであってもよい。
【0034】
別の方法では、治療実施システム200は、別のタイプの治療実施システム、例えばガントリ・ベース(アイソセントリック)強度変調放射線治療(IMRT)システムであってもよい。ガントリ・ベース・システムでは、放射線源(例えば、LINAC)は、患者の軸方向スライスに対応する平面で回転するようにガントリに取り付けられている。放射線はその後、円形回転平面上でいくつかの位置から運ばれる。IMRTでは、放射線ビームの形状は、ビームの一部をブロックすることを可能にする多葉コリメータによって規定され、それによって患者に入射する残りのビームは所定の形状を有する。得られるシステムは、ターゲットに用量分布で照射するようにアイソセンタで互いに交差する任意の形状の放射線ビームを生成する。IMRT計画では、最適化アルゴリズムは主なビームのサブセットを選択し、患者が各サブセットに曝されるべき時間を判断し、それによって所定の用量制約が最適に満たされる。
【0035】
他の実施形態では、さらに別のタイプの治療実施システム200、例えばスウェーデンのElektaから市販されているGammaKnife(登録商標)などの定位フレーム・システムを使用することができる。このようなシステムでは、治療計画の最適化アルゴリズム(球体包装アルゴリズムとも呼ばれる)は、提供された用量制約を最もよく満たすために、アイソセンタを形成するビームのグループに割り当てられた選択と用量重み付けとを判断する。
【0036】
本明細書に記載した方法及び装置は、医療診断画像化及び治療でのみの使用に限るものではないことに留意すべきである。代替実施形態では、本明細書の方法及び装置は、材料の産業的画像化及び非崩壊検査(例えば、自動車産業のモータ・ブロック、航空産業の機体、建設産業の溶接部、石油産業のドリル・コア)、地震探査などの医療技術分野の他の応用例で使用することもできる。このような応用例では、例えば、「治療」は全体的に(1つ又は複数の)放射線ビームの適用のことを言うことができる。
【0037】
また図1を参照すると、上に論じたように、治療計画システム120は、治療実施システム140による将来の使用のために1つ又は複数のアトラスを準備するアトラス処理モジュール136を備えている。アトラスとしては、手術前画像化モダリティのアトラス(例えば、CTアトラス)や、手術中画像化モダリティの対応するアトラス(例えば、超音波アトラス)を挙げることができる。例えば、CTアトラスや超音波アトラスは、CTスキャンの座標空間が超音波スキャンのものに対して較正される較正ステップを最初に行うことによって作り出すことができる。これを行う1つの方法は、CTと超音波の両方で見える知られている幾何形状の基準点を含むファントムのCTスキャンと超音波スキャンを行うことである。別の方法は、CTスキャナに対して知られている配向及び位置で超音波スキャナを取り付けることである。次に例えば、診断画像化システム110は、CTアトラスを作り出すために任意の患者のCTスキャンを、その後、超音波アトラスを作り出すために、患者を移動させることなく同じ患者の超音波スキャンを行うことができる。別の方法では、診断画像化システム110は、超音波アトラスを作り出すために任意の患者の超音波スキャンを、その後、CTアトラスを作り出すために、患者を移動させることなく同じ患者のCTスキャンを行うことができる。一実施形態では、アトラス処理モジュール136は、治療実施システム140による将来の使用のために、データベース152内に両方のアトラスを記憶する。
【0038】
別の実施形態では、アトラス処理モジュール136は、上記の2つのアトラスから組み合わせてアトラスを作り出し、治療実施システム140による将来の使用のためにデータベース152内に組み合わせたアトラスを記憶する。一実施形態では、アトラス処理モジュール136は、第1のアトラスを第2のアトラスに重ねることによって組み合わせたアトラスを作り出す。例えば、アトラス処理モジュール136は、CTアトラス上のCTデータに超音波アトラスからの超音波データをマッピングし、その後、マッピングに基づきCTアトラスに超音波データを加えることができる。別の方法では、アトラス処理モジュール136は、超音波アトラス上の超音波データにCTアトラスからのCTデータをマッピングし、その後、マッピングに基づき超音波アトラスにCTデータを加えることができる。別の実施形態では、アトラス処理モジュール136は、同じ空間内で2つのアトラスを(例えば、CT/超音波スキャナを使用して)取得することによって、又は当技術分野で知られている技術を使用して第1のアトラスを第2のアトラスに位置合わせすることになどによって、他の方法で組み合わせたアトラスを作り出すことができる。
【0039】
別の実施形態では、アトラス処理モジュール136は、組み合わせたアトラスを作り出すために単一のアトラスを使用する。例えば、アトラス処理モジュール136は、データベース152内に記憶されたCT画像からCTアトラス(例えば、任意の患者のCT画像)を選択する。その後、解剖学的器官をCTアトラス上に描写する。描写は手動で、又は強度ベース方法、形状ベース方法、又はその両方などの自動セグメンテーション・ツールによる援助で行うことができる。次に、超音波強度をアトラスに加える。各器官に対する超音波強度は、ユーザによって手動で判断する、又は解剖学的器官に対する普通の超音波強度分布を与えるデータベース内に記憶されたテーブルから取ることができる。別の方法では、アトラス処理モジュール136は、データベース152内に記憶された超音波画像から超音波アトラス(例えば、任意の患者の超音波画像)を選択し、上記方法を使用して超音波アトラス内の位置に対して対応するCTデータを判断し、その後、これらの対応するCTデータを超音波アトラスに加える。初期アトラス(例えば、CTアトラス又は超音波アトラス)は、ユーザによって提供される患者のパラメータ(例えば、構造の相対的位置及び形状に関して実質的に通常の解剖学的構造を備えた患者に対するパラメータ)に基づき選択することができる。別の方法では、初期アトラスは、多数の患者の画像を選択し、これらを平均的な患者に関する単一の画像に構成することによって作り出すことができる。
【0040】
一実施形態では、組み合わせたアトラスがいったん作り出され、異なる患者に使用される。別の実施形態では、組み合わせたアトラスは各患者用に作り出すことができる。さらに別の実施形態では、組み合わせたアトラスは各治療実施の前に再び作り出すことができる。
【0041】
上に論じるように、一実施形態では、アトラス処理モジュール136は、治療実施システム140による将来の使用のために、データベース152内に組み合わせたアトラスを記憶する。代替実施形態では、アトラス処理モジュール136は、将来の治療実施中の計算を簡単にするように、組み合わせたアトラスに対して追加の処理を行う。特に、一実施形態では、アトラス処理モジュール136は、組み合わせたアトラス上の手術前モダリティ・データ(例えば、CTデータ)を使用して、組み合わせたアトラスとの手術前モダリティ画像(例えば、放射線量計算に使用されるCT画像)の変形可能な位置合わせを行う。この位置合わせに関連するデータは、同じモダリティに関連しており、したがって、この位置合わせは計算的には強くない。この位置合わせの結果は、手術前モダリティ画像(例えば、CT画像)にアトラス上の手術前モダリティ・データ(例えば、CTデータ)を一致させるように変形された組み合わせたアトラスである。アトラス処理モジュール136はその後、治療実施システム140による将来の使用のために、データベース152内に変形させたアトラスを記憶する。
【0042】
上に論じるように、治療実施システム140は、治療実施中に患者の位置と配向をトラッキングする患者トラッキング・モジュール154を備えることができる。放射線源のパラメータを調節することによって、小さな変化に対応することができる。大きな変化は、患者が再位置決めされている間、治療における中断が必要である。
【0043】
患者トラッキング・モジュール154は、治療計画のために使用された治療前画像(例えば、手術前CTスキャン)での治療中に得られる画像を位置合わせすることによって、患者の位置と配向の測定を行う。手術中画像は、放射線に対する患者の追加の被曝が必要ない画像化モダリティを使用して、画像化システム144によって得られる。このようなモダリティは例えば、超音波スキャン又はMRスキャンなどである。一実施形態では、手術前モダリティや手術中モダリティは、2つの異なるタイプ(例えば、手術前CTスキャンと手術中超音波スキャン)である。その後、変形可能な位置合わせは困難な問題を示す可能性がある。患者トラッキング・モジュール154は、仮想画像を使用してこの問題を解消する。特に一実施形態では、患者トラッキング・モジュール154は、治療計画システム120によって処理され、データベース152内に記憶されたアトラスを使用する。一実施形態では、このアトラスは手術前モダリティのデータと、手術中モダリティのデータとを含む組み合わせたアトラスである。組み合わせたアトラスは例えば、その上に超音波情報が描かれたCTアトラスであってもよく、それによってCTアトラス内の全ての位置は対応する超音波強度を有する。別の方法では、このアトラスは、その上に対応するCT情報が描かれた超音波アトラスであってもよい。別の実施形態では、患者トラッキング・モジュール154は、データベース152から2つのアトラス(例えば、CTアトラス及び超音波アトラス)を取り出し、以下に論じる方法で組み合わせたアトラスを作る。
【0044】
一実施形態では、患者トラッキング・モジュール154は、一連の変形可能な位置合わせを行うことによって、手術前画像を手術中画像に位置合わせする。より詳細には、患者トラッキング・モジュール154は最初に、アトラス上の手術前データを使用して組み合わせたアトラスとの手術前画像の変形可能な位置合わせを行い、その後、アトラス上の手術中データを使用して手術中画像との組み合わせたアトラスの変形可能な位置合わせを行う。これらの変形可能な位置合わせは、イントラモダリティ位置合わせであり、したがって集中的な計算は必要ない。得られる変形した手術中画像は、手術前画像が得られた時の患者の位置と配向と比べた際の、患者の位置と配向の変化を示している。
【0045】
別の実施形態では、組み合わせたアトラスとの手術前画像の位置合わせは、上に論じたように、共有されるデータベース152内に得られた変形させたアトラスを記憶する治療計画システム120による治療前に行われる。その後、患者トラッキング・モジュール154は、データベース152から変形させたアトラスを取り出し、その後、アトラス上の手術中データを使用して手術中画像とこのアトラスを位置合わせする。
【0046】
さらに別の実施形態では、患者トラッキング・モジュール154は、アトラス上の手術中データを使用して、組み合わせたアトラスと手術中画像を最初に位置合わせし、その後、組み合わせたアトラスを手術前画像と位置合わせすることによって、逆の順序で一連の変形可能な位置合わせを行う。得られた変形させた手術前画像はその後、患者の位置と配向の変化を示している。
【0047】
図3は、異なる画像化モダリティ・タイプの画像を変形可能に位置合わせする過程500の一実施形態の流れ図である。過程は、アトラス処理モジュール136の処理論理、及び/又は患者トラッキング・モジュール154の処理論理によって行うことができる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。
【0048】
図3を参照すると、処理論理は、異なるモダリティの2つのアトラス(例えば、CTアトラス及び超音波アトラス)から組み合わせたアトラスを作り出す処理論理で開始する(処理ブロック502)。一実施形態では、処理論理は、第1のアトラスからのデータを第2のアトラス内のデータにマッピングし、その後、マッピングを使用して第1のアトラスからの第1のモダリティ・データを第2のアトラス上に重ね合わせることによって、組み合わせたアトラスを作り出す。例えば、処理論理は、超音波アトラスからの超音波データをCTアトラス上のCTデータにマッピングし、その後、マッピングに基づき、超音波データをCTアトラスに加える。別の方法では、処理論理は、任意の患者の第1のモダリティ画像を選択し、画像内の第1のモダリティ・データに対応する第2のモダリティ・データを自動的に判断し、第1のモダリティ画像に第2のモダリティ・データを加えることによって、組み合わせたアトラスを作る。
【0049】
一実施形態では、組み合わせたアトラスがいったん作られ、全ての患者用に使用される。別の実施形態では、組み合わせたアトラスは各患者用に作られる。さらに別の実施形態では、組み合わせたアトラスは各治療実施前に再び作り出す。
【0050】
処理ブロック504では、処理論理は患者の第1のモダリティ画像(例えば、CT画像)を得る。一実施形態では、第1のモダリティ画像は、治療実施前に治療計画を開発するように、データベース152から取り出される。
【0051】
処理ブロック506では、処理論理は患者の第2のモダリティ画像(例えば、超音波画像)を得る。第1と第2のモダリティは、2つの異なるタイプである。一実施形態では、第2のモダリティ画像は治療実施中に得られる。
【0052】
次に、処理論理は、一連の変形可能な位置合わせを使用して、第1のモダリティ画像を第2のモダリティ画像と位置合わせする。特に処理ブロック508では、処理論理は、組み合わせたアトラス上の第1のモダリティ・データを使用して、組み合わせたアトラスとの第1のモダリティ画像の変形可能な位置合わせを行う。一実施形態では、この変形可能な位置合わせは治療実施前に行われる。別の方法では、治療実施中に行われる。
【0053】
処理ブロック510では、処理論理は、処理ブロック508で変形された組み合わせたアトラスの第2のモダリティ画像との変形可能な位置合わせを行う。これらの変形可能な位置合わせはそれぞれ、集中的な計算が必要ないイントラモダリティ変換が必要である。組み合わせたアトラスに一致するように変形された得られた第2のモダリティ画像は、患者の位置と配向の変化を示している。
【0054】
一実施形態では、第1のモダリティ画像は手術前CT画像であり、第2のモダリティ画像は手術中超音波画像であり、位置合わせ過程は、治療計画段階と治療実施段階の2段階に分割される。
【0055】
図4は、画像位置合わせの治療計画段階を行う過程600の一実施形態の流れ図である。過程は、アトラス処理モジュール136の処理論理によって行うことができる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。
【0056】
図4を参照すると、過程600は、CTデータと超音波データを有する組み合わせたアトラスを作り出す処理論理で開始する(処理ブロック602)。一実施形態では、組み合わせたアトラスは超音波データが描かれたCTアトラスであり、それによってCTアトラス内の全ての位置は対応する超音波強度を有する。別の方法では、組み合わせたアトラスは、対応するCTデータが描かれた超音波アトラスである。
【0057】
処理ブロック604では、処理論理は患者のCT画像を得る。CT画像は、ターゲットを特定し、放射線量を計算するために得られる。
【0058】
処理ブロック606では、処理論理は、アトラス上のCTデータを使用して、組み合わせたアトラスとのCT画像の変形可能な位置合わせを行う。
【0059】
処理ブロック608では、処理論理は、データベース内に処理ブロック606で変形された組み合わせたアトラスを記憶する。
【0060】
図5は、画像位置合わせの治療実施段階を行う過程650の一実施形態の流れ図である。過程は、患者トラッキング・モジュール154の処理論理によって行われる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。
【0061】
図5を参照すると、過程650は、治療実施中に患者の超音波画像を得る処理論理で開始する(処理ブロック652)。
【0062】
処理ブロック654では、処理論理は、手術前CT画像に一致するように前に変形させた、組み合わせたアトラスをデータベースから取り出す。
【0063】
処理ブロック656では、処理論理は、アトラス上の超音波データを使用して、超音波画像との取り出したアトラスの変形可能な位置合わせを行う。アトラス上の超音波データに一致するように変形された超音波画像は、患者の位置と配向の変化を示している。
【0064】
代替実施形態では、一連の変形可能な位置合わせを逆の順序で行うことができる。図6は、異なるモダリティ・タイプの画像を変形可能に位置合わせする過程700の代替実施形態の流れ図である。過程は、アトラス処理モジュール136の処理論理、及び患者トラッキング・モジュール154の処理論理によって行うことができる。処理論理は、ハードウェア(例えば、回路、専用論理、プログラム可能論理、マイクロコードなど)、ソフトウェア(汎用コンピュータ・システム又は専用機械上で運用されるものなど)、又は両方の組合せを含むことができる。一実施形態では、過程700は図1のシステム100によって行われる。
【0065】
図6を参照すると、処理論理は組み合わせたアトラスを作り出す処理論理で開始する(処理ブロック702)。一実施形態では、組み合わせたアトラスは、その上に超音波データが描かれたCTアトラスであり、それによってCTアトラス内の全ての位置は対応する超音波強度を有する。別の方法では、組み合わせたアトラスは、その上に対応するCTデータが描かれた超音波アトラスである。
【0066】
次に、処理論理は、治療計画における使用のために治療の前に、患者のCT画像を得て(処理ブロック704)、データベース内にCT画像と組み合わせたアトラスを記憶する。
【0067】
一実施形態では、処理論理は治療計画中にブロック702から706までを行う。
【0068】
処理ブロック708では、処理論理は、治療実施中に患者の超音波画像を得る。
【0069】
処理ブロック710では、処理論理は、データベースから組み合わせたアトラス、及び患者の手術前CT画像を取り出す。
【0070】
さらに、処理論理は、アトラス上の超音波データを使用して組み合わせたアトラスとの超音波画像の変形可能な位置合わせを最初に行い(処理ブロック712)、その後アトラス上のCTデータを使用してCT画像との組み合わせたアトラスの変形可能な位置合わせを行うことによって(処理ブロック714)、患者の手術中超音波画像と患者の手術前CT画像を位置合わせする。
【0071】
一実施形態では、処理論理は治療実施中に、ブロック708から714を行う。
【0072】
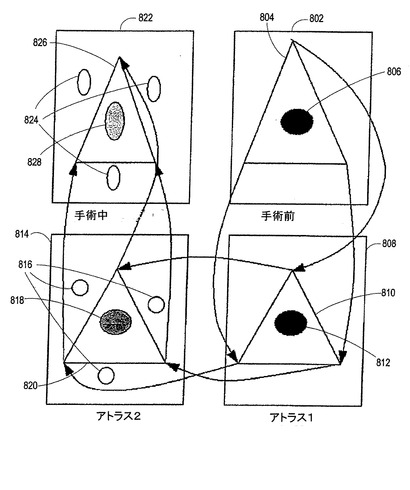
図7は、変形可能な位置合わせ過程の一実施形態で使用される例示的な画像を示している。
【0073】
図7を参照すると、画像802は、解剖学的構造806を含む手術前CT画像である。三角形804は、現在の患者の身体の形状を示している。
【0074】
画像808は、解剖学的構造812を含むCTアトラスである。上に論じるように、CTアトラスは、この又は何人かの他の患者の既存のCT画像であってもよい。患者及び/又は患者の位置は、CT画像802に関連するものと異なるので、三角形810は三角形804と異なる。矢印を有する曲線は、CT画像802上のデータと一致するような、CTアトラス808の変形を示している。
【0075】
アトラス814は、対応する超音波情報が描かれたCTアトラス808を表す。図示するように、アトラス808、814は共通のデータ(解剖学的構造812、818)と、アトラス808内には存在しないいくつかの超音波特有データ(解剖学的構造816)を含んでいる。アトラス808からアトラス814までの矢印を有する曲線は、2つのアトラス間のデータのマッピングを示している。
【0076】
アトラス808は、例示的な目的でのみ示されており、位置合わせ過程の中にある必要ない可能性があることに留意すべきである。すなわち、CT画像802は、アトラス814と直接位置合わせすることができる。
【0077】
画像822は、アトラス814と同じ解剖学的構造を有する手術中超音波画像である。患者の身体の形状は、三角形826によって示される。アトラス814から超音波画像822までの矢印を有する曲線は、アトラス814上のデータと一致するように画像822の変形を示している。超音波画像822上の得られる変化は、手術前CT画像802上に反映される患者の位置と配向と比べた際の、患者の位置と配向の変化を示している。
【0078】
前述の明細書では、本発明の実施形態をその特定の例示的な実施形態を参照して記載した。しかし、特許請求の範囲に記載したような本実施形態のより広い精神及び範囲から逸脱することなく、様々な変形及び変更をこれに加えることができることが明らかであろう。したがって、明細書及び図面は、限定的な意味ではなく、例示的なものとして解釈するものとする。
【図面の簡単な説明】
【0079】
【図1】本発明の特性を実施することができる、放射線治療を行う際に使用することができるシステムの一実施形態を示す図である。
【図2】画像ガイド・ロボット・ベース放射線治療システムの一実施形態を示す図である。
【図3】異なるモダリティ・タイプの画像を位置合わせする過程の一実施形態の流れ図である。
【図4】画像位置合わせの治療計画段階を行う過程の一実施形態の流れ図である。
【図5】画像位置合わせの治療実施段階を行う過程の一実施形態の流れ図である。
【図6】異なるモダリティ・タイプの画像を位置合わせする過程の代替実施形態の流れ図である。
【図7】変形可能な位置合わせ過程の一実施形態で使用される例示的な画像を示す図である。
【特許請求の範囲】
【請求項1】
第1の画像化モダリティの第1の画像を得るステップと、
少なくとも1つの画像アトラスを使用して、第2の画像化モダリティの第2の画像と前記第1の画像を位置合わせするステップであって、前記第1と第2の画像化モダリティは異なるタイプであるステップとを含む、コンピュータ実施方法。
【請求項2】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項1に記載の方法。
【請求項3】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項1に記載の方法。
【請求項4】
前記第1と第2の画像の一方は、磁気共鳴(MR)画像である請求項1に記載の方法。
【請求項5】
前記第1と第2の画像の一方は、陽電子放出断層撮影(PET)画像である請求項1に記載の方法。
【請求項6】
前記第1と第2の画像はそれぞれ、三次元(3D)画像である請求項1に記載の方法。
【請求項7】
前記第2の画像と前記第1の画像を位置合わせするステップに基づき、患者をトラッキングするステップをさらに含む請求項1に記載の方法。
【請求項8】
少なくとも1つの画像アトラスは、前記第1の画像化モダリティの第1のアトラス、及び前記第2の画像化モダリティの第2のアトラスを含む請求項1に記載の方法。
【請求項9】
前記第1のアトラスと前記第2のアトラスを使用して、組み合わせたアトラスを作り出すステップをさらに含む請求項8に記載の方法。
【請求項10】
前記組み合わせたアトラスを作り出す方法は、前記第2のアトラスからの第2の画像化モダリティ・データを前記第1のアトラス内の第1の画像化モダリティ・データにマッピングするステップと、
組み合わせたアトラスを作り出すように、前記マッピングするステップに基づき前記第2の画像化モダリティ・データを前記第1のアトラスに加えるステップとを含む請求項9に記載の方法。
【請求項11】
前記組み合わせたアトラスを作り出す方法は、前記第1のアトラスからの第1の画像化モダリティ・データを前記第2のアトラス内の第2の画像化モダリティ・データにマッピングするステップと、
組み合わせたアトラスを作り出すように、前記マッピングするステップに基づき前記第1の画像化モダリティ・データを前記第2のアトラスに加えるステップとを含む請求項9に記載の方法。
【請求項12】
前記組み合わせたアトラスは、前記第1の画像を前記第2の画像と位置合わせするステップの前に作り出される請求項9に記載の方法。
【請求項13】
前記第1の画像を前記第2の画像と位置合わせするステップは、前記組み合わせたアトラス内の前記第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス内の前記第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするステップとを含む請求項10に記載の方法。
【請求項14】
前記組み合わせたアトラスは、治療前に作り出され、
前記第1の画像は、前記治療前に前記第1のアトラスと位置合わせされ、
前記第1のアトラスは、前記治療中に前記第2の画像と位置合わせされる請求項13に記載の方法。
【請求項15】
前記第1の画像を前記第2の画像と位置合わせするステップは、前記組み合わせたアトラス内の前記第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス内の前記第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするステップとを含む請求項11に記載の方法。
【請求項16】
前記治療は放射線外科治療である請求項14に記載の方法。
【請求項17】
少なくとも1つの画像アトラスは、構造の相対的位置と形状に関してほぼ通常の解剖学的構造を有する任意の患者の既存の画像を含む請求項1に記載の方法。
【請求項18】
少なくとも1つの画像アトラスは、多数の任意の患者の平均化画像を含む請求項1に記載の方法。
【請求項19】
前記組み合わせたアトラスは、異なる患者用に作り出される請求項9に記載の方法。
【請求項20】
前記組み合わせたアトラスは、各患者用に作り出される請求項9に記載の方法。
【請求項21】
前記組み合わせたアトラスは、各治療実施に対して再び作り出される請求項9に記載の方法。
【請求項22】
治療実施中に患者の超音波(US)画像を得るステップと、
前記治療実施前に、前記患者に対して得られたコンピュータ断層撮影(CT)画像との前記US画像の変形可能な位置合わせを行うステップとを含むコンピュータ実施方法。
【請求項23】
前記変形可能な位置合わせに基づき、前記治療実施中に前記患者の位置を判断するステップをさらに含む請求項22に記載の方法。
【請求項24】
前記US画像及び前記CT画像はそれぞれ、三次元(3D)画像である請求項22に記載の方法。
【請求項25】
前記CT画像との前記US画像の変形可能な位置合わせを行うステップは、前記組み合わせたアトラス上のCTデータを使用して、組み合わせたアトラスとの前記CT画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス上のUSデータを使用して、前記CTアトラスを前記US画像と位置合わせするステップとを含む請求項22に記載の方法。
【請求項26】
前記CT画像は、前記治療実施前に前記組み合わせたアトラスと位置合わせされ、
前記組み合わせたアトラスは、前記治療実施中に前記US画像と位置合わせされる請求項25に記載の方法。
【請求項27】
前記治療は放射線外科治療である請求項22に記載の方法。
【請求項28】
前記組み合わせたアトラスは、重ね合わされた対応するUSデータを有するCTアトラスである請求項26に記載の方法。
【請求項29】
前記組み合わせたアトラスは、重ね合わされた対応するCTデータを有するUSアトラスである請求項26に記載の方法。
【請求項30】
第1の画像化モダリティの第1の画像を提供する画像化システムと、
少なくとも1つの画像アトラスを使用して、第2の画像化モダリティの第2の画像と前記第1の画像を位置合わせする処理論理を含む患者トラッキング・モジュールであって、前記第1と第2の画像化モダリティは異なるタイプである、患者トラッキング・モジュールと
を備える装置。
【請求項31】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項30に記載の装置。
【請求項32】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項30に記載の装置。
【請求項33】
前記患者トラッキング・モジュールは、前記第2の画像との前記第1の画像の位置合わせに基づき、患者をトラッキングするためである請求項30に記載の装置。
【請求項34】
少なくとも1つの画像アトラスは、前記第1の画像化モダリティの第1のアトラスと、前記第2の画像化モダリティの第2のアトラスを含む請求項33に記載の装置。
【請求項35】
前記第1のアトラスと前記第2のアトラスを使用して、組み合わせたアトラスを作り出すアトラス処理モジュールをさらに備える請求項34に記載の装置。
【請求項36】
前記アトラス処理モジュールは、前記組み合わせたアトラス内の第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うためであり、
前記患者トラッキング・モジュールは、前記組み合わせたアトラス内の第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするためである請求項35に記載の装置。
【請求項37】
第1の画像化モダリティの手術前画像を提供する診断画像化システムと、
第2の画像化モダリティの手術中画像との前記手術前画像の位置合わせの際に使用するための組み合わせたアトラスを作り出す処理論理を含むアトラス処理モジュールであって、前記組み合わせたアトラスは、第1の画像化モダリティ・データと、対応する第2の画像化モダリティ・データとを有するモジュールとを備える装置。
【請求項38】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項37に記載の装置。
【請求項39】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項37に記載の装置。
【請求項40】
前記組み合わせたアトラスを使用して、前記手術前画像を前記手術中画像に位置合わせし、前記位置合わせに基づき患者をトラッキングする処理論理を含む患者トラッキング・モジュールをさらに備える請求項37に記載の装置。
【請求項41】
前記アトラス処理モジュールは、前記組み合わせたアトラス内の第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うためであり、
前記患者トラッキング・モジュールは、前記組み合わせたアトラス内の第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするためである請求項40に記載の装置。
【請求項42】
処理システムによって実行される場合に、前記処理システムに、第1の画像化モダリティの第1の画像を得るステップと、少なくとも1つの画像アトラスを使用して、第2の画像化モダリティの第2の画像と前記第1の画像を位置合わせするステップであって、前記第1と第2の画像化モダリティは異なるタイプであるステップとを含む方法を行わせる指示を含む機械読取可能媒体。
【請求項43】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項42に記載の機械読取可能媒体。
【請求項44】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項42に記載の機械読取可能媒体。
【請求項45】
少なくとも1つの画像アトラスは、前記第1の画像化モダリティの第1のアトラスと前記第2の画像化モダリティの第2のアトラスを備え、
前記方法は、前記第1のアトラス及び前記第2のアトラスを使用して、組み合わせたアトラスを作り出すステップをさらに含む請求項42に記載の機械読取可能媒体。
【請求項46】
前記第1の画像を前記第2の画像と位置合わせするステップは、
前記組み合わせたアトラス内の前記第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス内の前記第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするステップとを含む請求項45に記載の機械読取可能媒体。
【請求項47】
処理システムによって実行される場合に、前記処理システムに、治療実施中に患者の超音波(US)画像を得るステップと、
前記治療実施前に、前記患者に対して得られるコンピュータ断層撮影(CT)画像との前記US画像の変形可能な位置合わせを行うステップとを含む方法を行わせる指示を含む機械読取可能媒体。
【請求項48】
前記CT画像との前記US画像の変形可能な位置合わせを行うステップは、
前記組み合わせたアトラス上のCTデータを使用して、組み合わせたアトラスとの前記CT画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス上のUSデータを使用して、前記CTアトラスを前記US画像と位置合わせするステップとを含む請求項47に記載の機械読取可能媒体。
【請求項49】
前記CT画像は、前記治療実施前に前記組み合わせたアトラスと位置合わせされ、
前記組み合わせたアトラスは、前記治療実施中に前記US画像と位置合わせされる請求項48に記載の機械読取可能媒体。
【請求項50】
前記治療は放射線外科治療である請求項47に記載の機械読取可能媒体。
【請求項1】
第1の画像化モダリティの第1の画像を得るステップと、
少なくとも1つの画像アトラスを使用して、第2の画像化モダリティの第2の画像と前記第1の画像を位置合わせするステップであって、前記第1と第2の画像化モダリティは異なるタイプであるステップとを含む、コンピュータ実施方法。
【請求項2】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項1に記載の方法。
【請求項3】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項1に記載の方法。
【請求項4】
前記第1と第2の画像の一方は、磁気共鳴(MR)画像である請求項1に記載の方法。
【請求項5】
前記第1と第2の画像の一方は、陽電子放出断層撮影(PET)画像である請求項1に記載の方法。
【請求項6】
前記第1と第2の画像はそれぞれ、三次元(3D)画像である請求項1に記載の方法。
【請求項7】
前記第2の画像と前記第1の画像を位置合わせするステップに基づき、患者をトラッキングするステップをさらに含む請求項1に記載の方法。
【請求項8】
少なくとも1つの画像アトラスは、前記第1の画像化モダリティの第1のアトラス、及び前記第2の画像化モダリティの第2のアトラスを含む請求項1に記載の方法。
【請求項9】
前記第1のアトラスと前記第2のアトラスを使用して、組み合わせたアトラスを作り出すステップをさらに含む請求項8に記載の方法。
【請求項10】
前記組み合わせたアトラスを作り出す方法は、前記第2のアトラスからの第2の画像化モダリティ・データを前記第1のアトラス内の第1の画像化モダリティ・データにマッピングするステップと、
組み合わせたアトラスを作り出すように、前記マッピングするステップに基づき前記第2の画像化モダリティ・データを前記第1のアトラスに加えるステップとを含む請求項9に記載の方法。
【請求項11】
前記組み合わせたアトラスを作り出す方法は、前記第1のアトラスからの第1の画像化モダリティ・データを前記第2のアトラス内の第2の画像化モダリティ・データにマッピングするステップと、
組み合わせたアトラスを作り出すように、前記マッピングするステップに基づき前記第1の画像化モダリティ・データを前記第2のアトラスに加えるステップとを含む請求項9に記載の方法。
【請求項12】
前記組み合わせたアトラスは、前記第1の画像を前記第2の画像と位置合わせするステップの前に作り出される請求項9に記載の方法。
【請求項13】
前記第1の画像を前記第2の画像と位置合わせするステップは、前記組み合わせたアトラス内の前記第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス内の前記第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするステップとを含む請求項10に記載の方法。
【請求項14】
前記組み合わせたアトラスは、治療前に作り出され、
前記第1の画像は、前記治療前に前記第1のアトラスと位置合わせされ、
前記第1のアトラスは、前記治療中に前記第2の画像と位置合わせされる請求項13に記載の方法。
【請求項15】
前記第1の画像を前記第2の画像と位置合わせするステップは、前記組み合わせたアトラス内の前記第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス内の前記第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするステップとを含む請求項11に記載の方法。
【請求項16】
前記治療は放射線外科治療である請求項14に記載の方法。
【請求項17】
少なくとも1つの画像アトラスは、構造の相対的位置と形状に関してほぼ通常の解剖学的構造を有する任意の患者の既存の画像を含む請求項1に記載の方法。
【請求項18】
少なくとも1つの画像アトラスは、多数の任意の患者の平均化画像を含む請求項1に記載の方法。
【請求項19】
前記組み合わせたアトラスは、異なる患者用に作り出される請求項9に記載の方法。
【請求項20】
前記組み合わせたアトラスは、各患者用に作り出される請求項9に記載の方法。
【請求項21】
前記組み合わせたアトラスは、各治療実施に対して再び作り出される請求項9に記載の方法。
【請求項22】
治療実施中に患者の超音波(US)画像を得るステップと、
前記治療実施前に、前記患者に対して得られたコンピュータ断層撮影(CT)画像との前記US画像の変形可能な位置合わせを行うステップとを含むコンピュータ実施方法。
【請求項23】
前記変形可能な位置合わせに基づき、前記治療実施中に前記患者の位置を判断するステップをさらに含む請求項22に記載の方法。
【請求項24】
前記US画像及び前記CT画像はそれぞれ、三次元(3D)画像である請求項22に記載の方法。
【請求項25】
前記CT画像との前記US画像の変形可能な位置合わせを行うステップは、前記組み合わせたアトラス上のCTデータを使用して、組み合わせたアトラスとの前記CT画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス上のUSデータを使用して、前記CTアトラスを前記US画像と位置合わせするステップとを含む請求項22に記載の方法。
【請求項26】
前記CT画像は、前記治療実施前に前記組み合わせたアトラスと位置合わせされ、
前記組み合わせたアトラスは、前記治療実施中に前記US画像と位置合わせされる請求項25に記載の方法。
【請求項27】
前記治療は放射線外科治療である請求項22に記載の方法。
【請求項28】
前記組み合わせたアトラスは、重ね合わされた対応するUSデータを有するCTアトラスである請求項26に記載の方法。
【請求項29】
前記組み合わせたアトラスは、重ね合わされた対応するCTデータを有するUSアトラスである請求項26に記載の方法。
【請求項30】
第1の画像化モダリティの第1の画像を提供する画像化システムと、
少なくとも1つの画像アトラスを使用して、第2の画像化モダリティの第2の画像と前記第1の画像を位置合わせする処理論理を含む患者トラッキング・モジュールであって、前記第1と第2の画像化モダリティは異なるタイプである、患者トラッキング・モジュールと
を備える装置。
【請求項31】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項30に記載の装置。
【請求項32】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項30に記載の装置。
【請求項33】
前記患者トラッキング・モジュールは、前記第2の画像との前記第1の画像の位置合わせに基づき、患者をトラッキングするためである請求項30に記載の装置。
【請求項34】
少なくとも1つの画像アトラスは、前記第1の画像化モダリティの第1のアトラスと、前記第2の画像化モダリティの第2のアトラスを含む請求項33に記載の装置。
【請求項35】
前記第1のアトラスと前記第2のアトラスを使用して、組み合わせたアトラスを作り出すアトラス処理モジュールをさらに備える請求項34に記載の装置。
【請求項36】
前記アトラス処理モジュールは、前記組み合わせたアトラス内の第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うためであり、
前記患者トラッキング・モジュールは、前記組み合わせたアトラス内の第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするためである請求項35に記載の装置。
【請求項37】
第1の画像化モダリティの手術前画像を提供する診断画像化システムと、
第2の画像化モダリティの手術中画像との前記手術前画像の位置合わせの際に使用するための組み合わせたアトラスを作り出す処理論理を含むアトラス処理モジュールであって、前記組み合わせたアトラスは、第1の画像化モダリティ・データと、対応する第2の画像化モダリティ・データとを有するモジュールとを備える装置。
【請求項38】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項37に記載の装置。
【請求項39】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項37に記載の装置。
【請求項40】
前記組み合わせたアトラスを使用して、前記手術前画像を前記手術中画像に位置合わせし、前記位置合わせに基づき患者をトラッキングする処理論理を含む患者トラッキング・モジュールをさらに備える請求項37に記載の装置。
【請求項41】
前記アトラス処理モジュールは、前記組み合わせたアトラス内の第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うためであり、
前記患者トラッキング・モジュールは、前記組み合わせたアトラス内の第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするためである請求項40に記載の装置。
【請求項42】
処理システムによって実行される場合に、前記処理システムに、第1の画像化モダリティの第1の画像を得るステップと、少なくとも1つの画像アトラスを使用して、第2の画像化モダリティの第2の画像と前記第1の画像を位置合わせするステップであって、前記第1と第2の画像化モダリティは異なるタイプであるステップとを含む方法を行わせる指示を含む機械読取可能媒体。
【請求項43】
前記第1と第2の画像化モダリティは、手術前画像化モダリティと手術中画像化モダリティを含む請求項42に記載の機械読取可能媒体。
【請求項44】
前記第1と第2の画像の一方は超音波(US)画像であり、前記第1と第2の画像のもう一方はコンピュータ断層撮影(CT)画像である請求項42に記載の機械読取可能媒体。
【請求項45】
少なくとも1つの画像アトラスは、前記第1の画像化モダリティの第1のアトラスと前記第2の画像化モダリティの第2のアトラスを備え、
前記方法は、前記第1のアトラス及び前記第2のアトラスを使用して、組み合わせたアトラスを作り出すステップをさらに含む請求項42に記載の機械読取可能媒体。
【請求項46】
前記第1の画像を前記第2の画像と位置合わせするステップは、
前記組み合わせたアトラス内の前記第1の画像化モダリティ・データを使用して、前記組み合わせたアトラスとの前記第1の画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス内の前記第2の画像化モダリティ・データを使用して、前記組み合わせたアトラスを前記第2の画像と位置合わせするステップとを含む請求項45に記載の機械読取可能媒体。
【請求項47】
処理システムによって実行される場合に、前記処理システムに、治療実施中に患者の超音波(US)画像を得るステップと、
前記治療実施前に、前記患者に対して得られるコンピュータ断層撮影(CT)画像との前記US画像の変形可能な位置合わせを行うステップとを含む方法を行わせる指示を含む機械読取可能媒体。
【請求項48】
前記CT画像との前記US画像の変形可能な位置合わせを行うステップは、
前記組み合わせたアトラス上のCTデータを使用して、組み合わせたアトラスとの前記CT画像の変形可能な位置合わせを行うステップと、
前記組み合わせたアトラス上のUSデータを使用して、前記CTアトラスを前記US画像と位置合わせするステップとを含む請求項47に記載の機械読取可能媒体。
【請求項49】
前記CT画像は、前記治療実施前に前記組み合わせたアトラスと位置合わせされ、
前記組み合わせたアトラスは、前記治療実施中に前記US画像と位置合わせされる請求項48に記載の機械読取可能媒体。
【請求項50】
前記治療は放射線外科治療である請求項47に記載の機械読取可能媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2009−504245(P2009−504245A)
【公表日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2008−526023(P2008−526023)
【出願日】平成18年7月14日(2006.7.14)
【国際出願番号】PCT/US2006/027625
【国際公開番号】WO2007/021420
【国際公開日】平成19年2月22日(2007.2.22)
【出願人】(505005625)アキュレイ・インコーポレーテッド (11)
【Fターム(参考)】
【公表日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成18年7月14日(2006.7.14)
【国際出願番号】PCT/US2006/027625
【国際公開番号】WO2007/021420
【国際公開日】平成19年2月22日(2007.2.22)
【出願人】(505005625)アキュレイ・インコーポレーテッド (11)
【Fターム(参考)】
[ Back to top ]