
仮想脳外科手術シミュレータ
【課題】三角形メッシュで構成されている一般的な仮想脳モデルに対しても仮想吸引シミュレーションが可能なシミュレータを実現する。
【解決手段】病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、吸引された部位の境界を算出するために、球の方程式で仮想脳モデルを構成する三角形メッシュを切断する第1のステップと、切断された三角形メッシュの中で境界で生成された細い三角形メッシュを除去する第2のステップと、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する第3のステップと、前記第3ステップで計算した点を繋げて三角形メッシュを生成する第4のステップからなる。
【解決手段】病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、吸引された部位の境界を算出するために、球の方程式で仮想脳モデルを構成する三角形メッシュを切断する第1のステップと、切断された三角形メッシュの中で境界で生成された細い三角形メッシュを除去する第2のステップと、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する第3のステップと、前記第3ステップで計算した点を繋げて三角形メッシュを生成する第4のステップからなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三角形メッシュで構成されている仮想脳モデルに対して仮想吸引作業を行った場合における、吸引された部位のメッシュデータ処理に基づく仮想脳外科手術シミュレータに関する。
【背景技術】
【0002】
最近、内視鏡やロボットを含んだ特殊な機器を使用して、組織になるべく最小のダメージを与えるように手術することで、手術創が小さい、回復が早い、痛みが少ないなど患者さんの負担を減らすことができる最小侵襲手術法(Minimally Invasive Surgery:MIS)が様々な身体部位で応用されている。最小侵襲手術法では、従来の手術法とは異なる特殊な機器が使われるため、ロボットの操作や機器の使い方に慣れる必要がある。そのため、バーチャルリアリティ技術を用いて仮想的に手術環境を構築して、様々な手術機器を用いた手術法の訓練が可能な仮想手術シミュレータが必要である。
【0003】
仮想手術シミュレータはコンピュータ上で実行されるため、シミュレーションの対象になる仮想臓器モデルが必要である。仮想臓器モデルは医療画像(MRI, CTなど)をもとにして作成し、三角形メッシュで構成されるのが一般的である。その仮想臓器モデルを用いて、実際の手術作業によって発生する手術環境の変化(組織の切断、縫合、患部の形の変化など)を計算し、その変化を訓練者に呈示することで仮想手術訓練ができるのである。
【0004】
訓練効果を高めるため、仮想手術シミュレータは実際の手術作業で起こる現状をなるべく忠実に再現するのが重要である。そのため、仮想臓器モデルと手術機器の衝突検出や仮想臓器モデルの変形計算などの技術が使われている。これらの技術は全て三角形メッシュモデルをもとにして動くため、仮想手術作業を行う間に仮想臓器モデルのメッシュ構造を維持するのが大事である。ここでメッシュ構造を維持するというのは、仮想手術作業によって変わる臓器の状態に合わせてメッシュを切断や再生成して、抜けている部分又は重なる三角形メッシュがないように管理することを意味する。
【0005】
これまで提案されてきた仮想手術シミュレータは、腹部や胸部の仮想手術環境を提供し、手術作業も患部の切断、縫合に集中されている。そういう作業の仮想モデリングでは、メスや針などが動いた軌跡に従ってその周辺のメッシュを連続的に調整するのである。しかし、脳外科手術では、吸引管を用いて腫瘍や脳組織を取り除くのが主な作業として行われている。吸引作業では組織の一部が吸引されてなくなるため、仮想的にモデリングする場合、三角形メッシュを連続的に調整する従来のモデリング法は適用できないのである。
【0006】
仮想脳外科手術シミュレータとして、仮想吸引作業を実装した仮想訓練シミュレータがあるが、 仮想脳モデルをアイソサーフェス(isosurface:等値面)でモデリングしたため(例えば、仮想脳モデルを半球形でモデリングしている)、提案された仮想吸引モデリング法はアイソサーフェスではない実際の脳の形状をしている仮想脳モデルには適用できない欠点がある(非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】「A Computer Model of Soft Tissue Interaction with a Surgical Aspirator」、MICCAI (International Conference on Medical Image Computing and Computer Assisted Intervention), 2009年、p.51?58
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、以上に述べた従来の仮想手術シミュレータの問題を解決しようとするものであり、仮想吸引モデリング法を汎用化して、三角形メッシュで構成されている一般的な仮想脳モデルに対しても仮想吸引シミュレーションが可能なシミュレータを実現することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1に記載の発明は、仮想モデルを構成する三角形メッシュを用いて病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、吸引された部位の境界を算出するために、球の方程式で、前記仮想モデルを構成する三角形メッシュを切断する切断手段と、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する座標計算手段と、前記座標計算手段で計算した点を繋げて三角形メッシュを生成する生成手段と、を備えることを特徴とする。この特徴により、これまで実現されていなかった脳の吸引部位の仮想モデリングが可能となる。
【0010】
上記した脳外科手術の仮想的なシミュレーションは、請求項2に記載の発明のように、前記仮想吸引管の先端部が前記仮想脳モデルの表面に当たった状態で吸引すると、除去された仮想モデルの部位を球面の形でモデリングするものとすることができ、この場合、前記球の方程式は、前記仮想吸引管の先端部により吸引される部位の球形状を表すものとすることができる。具体的には、請求項3に記載の発明のように、前記球の方程式は、前記仮想吸引管の先端部の中心点が球の中心、前記仮想吸引管の先端部の半径が球の半径となるものとすることができる。
【0011】
また、上記した切断手段は、請求項4に記載の発明のように、前記球の方程式と前記仮想モデルを構成する三角形メッシュとが交差する交差点を用いて三角形メッシュを再生成し、除去された部位の境界線と境界点を得るものとすることができる。
【0012】
この場合、請求項5に記載の発明のように、前記再生成された三角形メッシュの中で、一番長い辺と境界に接している辺の長さの比が所定値以下となる細い三角形メッシュを除去する除去手段を備えて、境界で生成された細い三角形メッシュを除去するようにすれば、より細かい三角形メッシュの生成が防止され、脳の吸引部位の仮想モデリングをより容易に行うことができる。
【発明の効果】
【0013】
本発明の仮想脳外科手術シミュレータにより、吸引ツールを用いた脳外科手術環境を仮想的に提供することが可能となり、安全な脳外科手術に向けた訓練が実施できるようになる。
【図面の簡単な説明】
【0014】
【図1】ハードウェアシステムの構成を示す概念図である。
【図2】コンピューター上に構築された仮想手術シミュレーション環境を示す概念図である。
【図3】吸引装置を用いた脳外科手術の概念図である。
【図4】吸引された部位を仮想モデリングするフローチャートである。
【図5】球の方程式で仮想脳モデルを切断した結果を示す概念図である。
【図6】切断によって境界に生成された細い三角形メッシュを示す概念図である。
【図7】細い三角形メッシュの定義を示す概念図である。
【図8】細い三角形メッシュを除去する方法を示す概念図である。
【図9】極座標系の定義を示す図である。
【図10】球面上の点を二次元的に示した概念図である。
【図11】切断された表面の下にある点を二次元的に示した概念図である。
【図12】切断された表面の下にある点を三次元的に示した概念図である。
【図13】吸引された部位の曲面を三角形メッシュで構成する過程を示す概念図である。
【図14】吸引された部位を仮想モデリングした例について示す概念図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図1〜図14に基づいて説明する。
【0016】
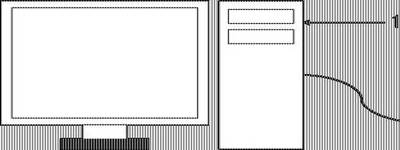
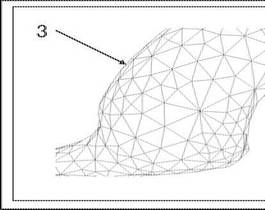
一般的に仮想医療シミュレーションシステムは、図1に示すように、仮想手術環境を構築するコンピューター1と仮想環境で生成された力情報を訓練者に呈示する力呈示デバイス2で構成されている。訓練者が力呈示デバイス2を操作すると、その動作情報がコンピューター1に転送され、図2に示すように、コンピューター上で構成されている仮想手術環境の中で仮想手術装置を操作することが可能であり、仮想手術環境で発生した物理的な感覚(反力、衝突感など)が力呈示デバイス2で呈示されることで、訓練者が操作感覚を感じながら手術訓練を繰り返すことが可能である。なお、図2中の3は、仮想脳外科手術シミュレータで表示される仮想脳モデルを示している。
【0017】
脳外科手術では吸引管で腫瘍を吸って除くのが主な作業であるため、仮想脳外科手術シミュレーションでは吸引作業によって除去された部位を仮想的にモデリングするのが必要である。図3(a)に示すように、力呈示デバイス2を動かすと仮想吸引管が動き、仮想吸引管の先端部4が仮想脳モデル3の表面に当たった状態で吸引すると、図3(b)に示すように、除去された仮想脳モデルの部位5を球面の形でモデリングする。
【0018】
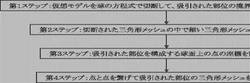
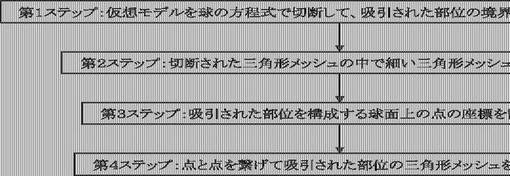
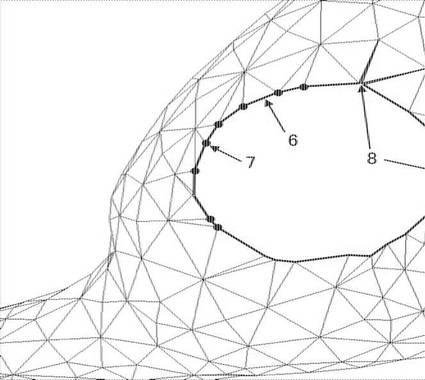
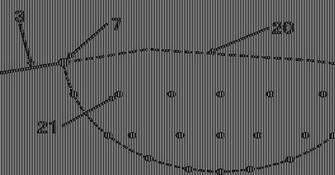
仮想吸引作業で除去された部位の仮想モデリング法は、図4に示すように、四つのステップで構成される。第1ステップでは、吸引された部位の境界を生成するため、数式1の球の方程式を用いて仮想脳モデルを切断する。球の方程式と仮想脳モデルの三角形メッシュとの交差テストを行い、交差された場合は交差点を用いて周辺の三角形メッシュを再生成する。そうすることで、図5に示すように、除去された部位の境界を構成する境界線6と境界点7が得られる。球の方程式は、仮想吸引管の先端部4により吸引される部位の球形状を表すものであり、数式1の球の方程式では、

【0019】
は仮想吸引管の先端部4が仮想脳モデル3の表面に当たった時の仮想吸引管の先端部4の中心位置を、
【0020】
は仮想吸引管の先端部4の半径を示している。
【0021】
【数1】
【0022】
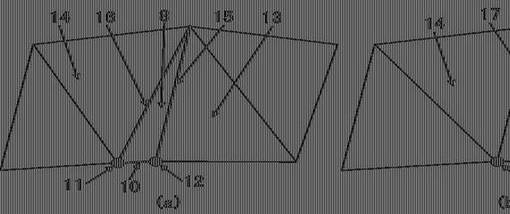
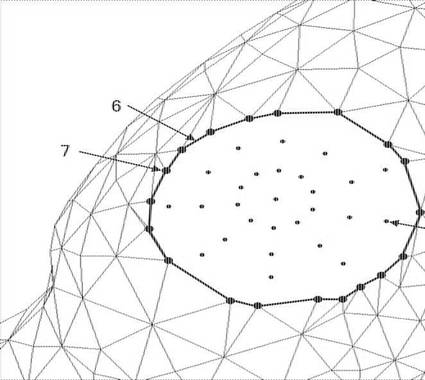
第1ステップで三角形メッシュを再生成した場合、図6に示すように、切断される三角形メッシュの位置によって境界に細い三角形メッシュ8が生成される場合がある。細い三角形メッシュ8は、境界に接している三角形メッシュで、図7に示すように、一番長い辺9と境界に接している辺6の長さの比が所定値(例えば0.1)以下になる三角形メッシュをいい、仮想吸引作業を繰り返すことでさらに細かいメッシュが生成される。このように細かいメッシュが生成されると、脳の吸引部位における表面変形計算の安定性が損なわれる。そこで、第2ステップでは、切断によって境界部分で生成された細い三角形メッシュ8を除去する。例えば、図8に示すように、細い三角形メッシュ8と細い三角形メッシュ8を構成する三つの辺(10、15,16)と一つの点(11)をコンピューター1のメモリから削除し、隣の三角形メッシュ(13,14)の共通辺17を生成して連結関係を更新することで、細い三角形メッシュ8の削除が可能である。このように境界で生成された細い三角形メッシュを除去することで、脳の吸引部位における表面変形計算の安定性を向上させることができる。
【0023】
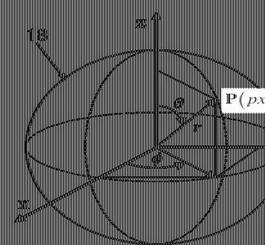
第3ステップでは、除去された仮想脳モデルの部位5の曲面のメッシュを生成するために必要な点の座標を計算する。図9に示すのは極座標系の一般的な定義であって、球面18のある位置
【0024】
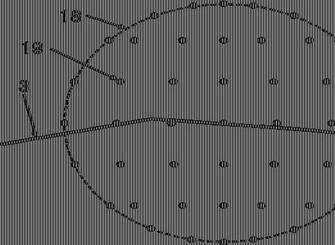
の座標は数式2により計算が可能である。θを0oから180 oまで、φを0oから360oまでの区間で変更しながら座標を計算すると、図10のように球面上の点19が取れる。球の方程式で切断された仮想脳モデルの表面20と球面上の点19の位置関係を比較し、球の方程式で切断された仮想脳モデルの表面20の下にある点だけを集めると、図11に示すように切断された表面の下にある点21の分類が可能である。図12は切断された表面の下にある点21を三次元的に表示した概念図である。
【0025】
【数2】
【0026】
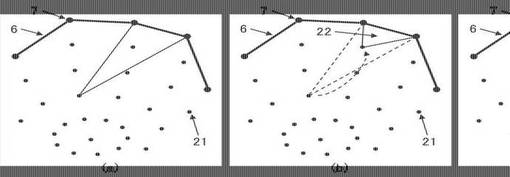
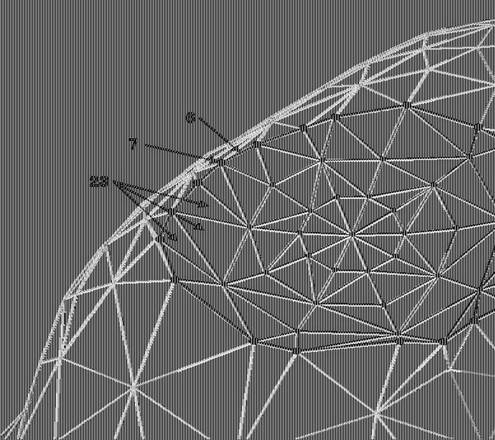
第4ステップでは、第1ステップで得た境界線6や境界点7と、第3ステップで計算した切断された表面の下にある点21を繋げて三角形メッシュを構成する。図13(a)に示すように、境界線6の中で一番短い境界線を検索してその線を構成する二つの点と、第3ステップで計算した切断された表面の下にある点21の中で任意の点を一つ選んで平面方程式を計算する。その平面の裏に他の点が存在するかを確認し、平面の裏に他の点があった場合、その点と二つの境界点で新しい平面を構成する。平面の裏に点がない時までこのプロセスを繰り返し、図13(b)のようにその三つの点で最初の三角形メッシュ22を構成する。生成された三角形メッシュの各辺に対して同様なプロセスを繰り返すことで、図13(c)のように吸引部位の三角形メッシュ23の生成が可能である。図14は、以上の手順によって生成された吸引された部位の仮想モデリングを示している。
【0027】
なお、図4に示す仮想モデリング法は、コンピューター1によるソフトウェアによって実現されるものであり、第1〜第4ステップはそれぞれの機能を実現する手段として把握される。すなわち、第1ステップは、吸引された部位の境界を算出するために、球の方程式で仮想脳モデルを構成する三角形メッシュを切断する切断手段を構成し、第2ステップは、境界で生成された細い三角形メッシュを除去する除去手段を構成し、第3ステップは、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する座標計算手段を構成し、第4ステップは、座標計算手段で計算した点を繋げて三角形メッシュを生成する生成手段を構成するものとして把握される。
【符号の説明】
【0028】
1 コンピューターシステム
2 力呈示デバイス
3 仮想脳外科手術シミュレータで表示される仮想脳モデル
4 仮想吸引管の先端部
5 除去された仮想脳モデルの部位
6 境界線
7 境界点
8 細い三角形メッシュ
9 細い三角形メッシュの中で一番長い辺
10 境界に接している細い三角形メッシュの辺
11 境界に接している細い三角形メッシュの辺を構成する始点
12 境界に接している細い三角形メッシュの辺を構成する終点
13 細い三角形メッシュの右側に接している三角形メッシュ
14 細い三角形メッシュの左側に接している三角形メッシュ
15 細い三角形メッシュと右側に接している三角形メッシュの共通辺
16 細い三角形メッシュと左側に接している三角形メッシュの共通辺
17 細い三角形メッシュの削除後の左右三角形メッシュの共通辺
18 極座標系での球
19 球面上の点
20 球の方程式で切断された仮想脳モデルの表面
21 切断された表面の下にある点
22 最初の三角形メッシュ
23 吸引部位の三角形メッシュ
【技術分野】
【0001】
本発明は、三角形メッシュで構成されている仮想脳モデルに対して仮想吸引作業を行った場合における、吸引された部位のメッシュデータ処理に基づく仮想脳外科手術シミュレータに関する。
【背景技術】
【0002】
最近、内視鏡やロボットを含んだ特殊な機器を使用して、組織になるべく最小のダメージを与えるように手術することで、手術創が小さい、回復が早い、痛みが少ないなど患者さんの負担を減らすことができる最小侵襲手術法(Minimally Invasive Surgery:MIS)が様々な身体部位で応用されている。最小侵襲手術法では、従来の手術法とは異なる特殊な機器が使われるため、ロボットの操作や機器の使い方に慣れる必要がある。そのため、バーチャルリアリティ技術を用いて仮想的に手術環境を構築して、様々な手術機器を用いた手術法の訓練が可能な仮想手術シミュレータが必要である。
【0003】
仮想手術シミュレータはコンピュータ上で実行されるため、シミュレーションの対象になる仮想臓器モデルが必要である。仮想臓器モデルは医療画像(MRI, CTなど)をもとにして作成し、三角形メッシュで構成されるのが一般的である。その仮想臓器モデルを用いて、実際の手術作業によって発生する手術環境の変化(組織の切断、縫合、患部の形の変化など)を計算し、その変化を訓練者に呈示することで仮想手術訓練ができるのである。
【0004】
訓練効果を高めるため、仮想手術シミュレータは実際の手術作業で起こる現状をなるべく忠実に再現するのが重要である。そのため、仮想臓器モデルと手術機器の衝突検出や仮想臓器モデルの変形計算などの技術が使われている。これらの技術は全て三角形メッシュモデルをもとにして動くため、仮想手術作業を行う間に仮想臓器モデルのメッシュ構造を維持するのが大事である。ここでメッシュ構造を維持するというのは、仮想手術作業によって変わる臓器の状態に合わせてメッシュを切断や再生成して、抜けている部分又は重なる三角形メッシュがないように管理することを意味する。
【0005】
これまで提案されてきた仮想手術シミュレータは、腹部や胸部の仮想手術環境を提供し、手術作業も患部の切断、縫合に集中されている。そういう作業の仮想モデリングでは、メスや針などが動いた軌跡に従ってその周辺のメッシュを連続的に調整するのである。しかし、脳外科手術では、吸引管を用いて腫瘍や脳組織を取り除くのが主な作業として行われている。吸引作業では組織の一部が吸引されてなくなるため、仮想的にモデリングする場合、三角形メッシュを連続的に調整する従来のモデリング法は適用できないのである。
【0006】
仮想脳外科手術シミュレータとして、仮想吸引作業を実装した仮想訓練シミュレータがあるが、 仮想脳モデルをアイソサーフェス(isosurface:等値面)でモデリングしたため(例えば、仮想脳モデルを半球形でモデリングしている)、提案された仮想吸引モデリング法はアイソサーフェスではない実際の脳の形状をしている仮想脳モデルには適用できない欠点がある(非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】「A Computer Model of Soft Tissue Interaction with a Surgical Aspirator」、MICCAI (International Conference on Medical Image Computing and Computer Assisted Intervention), 2009年、p.51?58
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、以上に述べた従来の仮想手術シミュレータの問題を解決しようとするものであり、仮想吸引モデリング法を汎用化して、三角形メッシュで構成されている一般的な仮想脳モデルに対しても仮想吸引シミュレーションが可能なシミュレータを実現することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1に記載の発明は、仮想モデルを構成する三角形メッシュを用いて病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、吸引された部位の境界を算出するために、球の方程式で、前記仮想モデルを構成する三角形メッシュを切断する切断手段と、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する座標計算手段と、前記座標計算手段で計算した点を繋げて三角形メッシュを生成する生成手段と、を備えることを特徴とする。この特徴により、これまで実現されていなかった脳の吸引部位の仮想モデリングが可能となる。
【0010】
上記した脳外科手術の仮想的なシミュレーションは、請求項2に記載の発明のように、前記仮想吸引管の先端部が前記仮想脳モデルの表面に当たった状態で吸引すると、除去された仮想モデルの部位を球面の形でモデリングするものとすることができ、この場合、前記球の方程式は、前記仮想吸引管の先端部により吸引される部位の球形状を表すものとすることができる。具体的には、請求項3に記載の発明のように、前記球の方程式は、前記仮想吸引管の先端部の中心点が球の中心、前記仮想吸引管の先端部の半径が球の半径となるものとすることができる。
【0011】
また、上記した切断手段は、請求項4に記載の発明のように、前記球の方程式と前記仮想モデルを構成する三角形メッシュとが交差する交差点を用いて三角形メッシュを再生成し、除去された部位の境界線と境界点を得るものとすることができる。
【0012】
この場合、請求項5に記載の発明のように、前記再生成された三角形メッシュの中で、一番長い辺と境界に接している辺の長さの比が所定値以下となる細い三角形メッシュを除去する除去手段を備えて、境界で生成された細い三角形メッシュを除去するようにすれば、より細かい三角形メッシュの生成が防止され、脳の吸引部位の仮想モデリングをより容易に行うことができる。
【発明の効果】
【0013】
本発明の仮想脳外科手術シミュレータにより、吸引ツールを用いた脳外科手術環境を仮想的に提供することが可能となり、安全な脳外科手術に向けた訓練が実施できるようになる。
【図面の簡単な説明】
【0014】
【図1】ハードウェアシステムの構成を示す概念図である。
【図2】コンピューター上に構築された仮想手術シミュレーション環境を示す概念図である。
【図3】吸引装置を用いた脳外科手術の概念図である。
【図4】吸引された部位を仮想モデリングするフローチャートである。
【図5】球の方程式で仮想脳モデルを切断した結果を示す概念図である。
【図6】切断によって境界に生成された細い三角形メッシュを示す概念図である。
【図7】細い三角形メッシュの定義を示す概念図である。
【図8】細い三角形メッシュを除去する方法を示す概念図である。
【図9】極座標系の定義を示す図である。
【図10】球面上の点を二次元的に示した概念図である。
【図11】切断された表面の下にある点を二次元的に示した概念図である。
【図12】切断された表面の下にある点を三次元的に示した概念図である。
【図13】吸引された部位の曲面を三角形メッシュで構成する過程を示す概念図である。
【図14】吸引された部位を仮想モデリングした例について示す概念図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図1〜図14に基づいて説明する。
【0016】
一般的に仮想医療シミュレーションシステムは、図1に示すように、仮想手術環境を構築するコンピューター1と仮想環境で生成された力情報を訓練者に呈示する力呈示デバイス2で構成されている。訓練者が力呈示デバイス2を操作すると、その動作情報がコンピューター1に転送され、図2に示すように、コンピューター上で構成されている仮想手術環境の中で仮想手術装置を操作することが可能であり、仮想手術環境で発生した物理的な感覚(反力、衝突感など)が力呈示デバイス2で呈示されることで、訓練者が操作感覚を感じながら手術訓練を繰り返すことが可能である。なお、図2中の3は、仮想脳外科手術シミュレータで表示される仮想脳モデルを示している。
【0017】
脳外科手術では吸引管で腫瘍を吸って除くのが主な作業であるため、仮想脳外科手術シミュレーションでは吸引作業によって除去された部位を仮想的にモデリングするのが必要である。図3(a)に示すように、力呈示デバイス2を動かすと仮想吸引管が動き、仮想吸引管の先端部4が仮想脳モデル3の表面に当たった状態で吸引すると、図3(b)に示すように、除去された仮想脳モデルの部位5を球面の形でモデリングする。
【0018】
仮想吸引作業で除去された部位の仮想モデリング法は、図4に示すように、四つのステップで構成される。第1ステップでは、吸引された部位の境界を生成するため、数式1の球の方程式を用いて仮想脳モデルを切断する。球の方程式と仮想脳モデルの三角形メッシュとの交差テストを行い、交差された場合は交差点を用いて周辺の三角形メッシュを再生成する。そうすることで、図5に示すように、除去された部位の境界を構成する境界線6と境界点7が得られる。球の方程式は、仮想吸引管の先端部4により吸引される部位の球形状を表すものであり、数式1の球の方程式では、
【0019】
は仮想吸引管の先端部4が仮想脳モデル3の表面に当たった時の仮想吸引管の先端部4の中心位置を、
【0020】
は仮想吸引管の先端部4の半径を示している。
【0021】
【数1】
【0022】
第1ステップで三角形メッシュを再生成した場合、図6に示すように、切断される三角形メッシュの位置によって境界に細い三角形メッシュ8が生成される場合がある。細い三角形メッシュ8は、境界に接している三角形メッシュで、図7に示すように、一番長い辺9と境界に接している辺6の長さの比が所定値(例えば0.1)以下になる三角形メッシュをいい、仮想吸引作業を繰り返すことでさらに細かいメッシュが生成される。このように細かいメッシュが生成されると、脳の吸引部位における表面変形計算の安定性が損なわれる。そこで、第2ステップでは、切断によって境界部分で生成された細い三角形メッシュ8を除去する。例えば、図8に示すように、細い三角形メッシュ8と細い三角形メッシュ8を構成する三つの辺(10、15,16)と一つの点(11)をコンピューター1のメモリから削除し、隣の三角形メッシュ(13,14)の共通辺17を生成して連結関係を更新することで、細い三角形メッシュ8の削除が可能である。このように境界で生成された細い三角形メッシュを除去することで、脳の吸引部位における表面変形計算の安定性を向上させることができる。
【0023】
第3ステップでは、除去された仮想脳モデルの部位5の曲面のメッシュを生成するために必要な点の座標を計算する。図9に示すのは極座標系の一般的な定義であって、球面18のある位置
【0024】
の座標は数式2により計算が可能である。θを0oから180 oまで、φを0oから360oまでの区間で変更しながら座標を計算すると、図10のように球面上の点19が取れる。球の方程式で切断された仮想脳モデルの表面20と球面上の点19の位置関係を比較し、球の方程式で切断された仮想脳モデルの表面20の下にある点だけを集めると、図11に示すように切断された表面の下にある点21の分類が可能である。図12は切断された表面の下にある点21を三次元的に表示した概念図である。
【0025】
【数2】
【0026】
第4ステップでは、第1ステップで得た境界線6や境界点7と、第3ステップで計算した切断された表面の下にある点21を繋げて三角形メッシュを構成する。図13(a)に示すように、境界線6の中で一番短い境界線を検索してその線を構成する二つの点と、第3ステップで計算した切断された表面の下にある点21の中で任意の点を一つ選んで平面方程式を計算する。その平面の裏に他の点が存在するかを確認し、平面の裏に他の点があった場合、その点と二つの境界点で新しい平面を構成する。平面の裏に点がない時までこのプロセスを繰り返し、図13(b)のようにその三つの点で最初の三角形メッシュ22を構成する。生成された三角形メッシュの各辺に対して同様なプロセスを繰り返すことで、図13(c)のように吸引部位の三角形メッシュ23の生成が可能である。図14は、以上の手順によって生成された吸引された部位の仮想モデリングを示している。
【0027】
なお、図4に示す仮想モデリング法は、コンピューター1によるソフトウェアによって実現されるものであり、第1〜第4ステップはそれぞれの機能を実現する手段として把握される。すなわち、第1ステップは、吸引された部位の境界を算出するために、球の方程式で仮想脳モデルを構成する三角形メッシュを切断する切断手段を構成し、第2ステップは、境界で生成された細い三角形メッシュを除去する除去手段を構成し、第3ステップは、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する座標計算手段を構成し、第4ステップは、座標計算手段で計算した点を繋げて三角形メッシュを生成する生成手段を構成するものとして把握される。
【符号の説明】
【0028】
1 コンピューターシステム
2 力呈示デバイス
3 仮想脳外科手術シミュレータで表示される仮想脳モデル
4 仮想吸引管の先端部
5 除去された仮想脳モデルの部位
6 境界線
7 境界点
8 細い三角形メッシュ
9 細い三角形メッシュの中で一番長い辺
10 境界に接している細い三角形メッシュの辺
11 境界に接している細い三角形メッシュの辺を構成する始点
12 境界に接している細い三角形メッシュの辺を構成する終点
13 細い三角形メッシュの右側に接している三角形メッシュ
14 細い三角形メッシュの左側に接している三角形メッシュ
15 細い三角形メッシュと右側に接している三角形メッシュの共通辺
16 細い三角形メッシュと左側に接している三角形メッシュの共通辺
17 細い三角形メッシュの削除後の左右三角形メッシュの共通辺
18 極座標系での球
19 球面上の点
20 球の方程式で切断された仮想脳モデルの表面
21 切断された表面の下にある点
22 最初の三角形メッシュ
23 吸引部位の三角形メッシュ
【特許請求の範囲】
【請求項1】
仮想モデルを構成する三角形メッシュを用いて病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、
吸引された部位の境界を算出するために、球の方程式で、前記仮想モデルを構成する三角形メッシュを切断する切断手段と、
吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する座標計算手段と、
前記座標計算手段で計算した点を繋げて三角形メッシュを生成する生成手段と、を備えることを特徴とする仮想脳外科手術シミュレータ。
【請求項2】
前記脳外科手術の仮想的なシミュレーションは、仮想吸引管の先端部が前記仮想脳モデルの表面に当たった状態で吸引すると、除去された仮想モデルの部位を球面の形でモデリングするものであり、前記球の方程式は、前記仮想吸引管の先端部により吸引される部位の球形状を表すものであることを特徴とする請求項1に記載の仮想脳外科手術シミュレータ。
【請求項3】
前記球の方程式は、前記仮想吸引管の先端部の中心点が球の中心、前記仮想吸引管の先端部の半径が球の半径となるものであることを特徴とする請求項2に記載の仮想脳外科手術シミュレータ。
【請求項4】
前記切断手段は、前記球の方程式と前記仮想モデルを構成する三角形メッシュとが交差する交差点を用いて三角形メッシュを再生成し、除去された部位の境界線と境界点を得ることを特徴とする請求項1ないし3のいずれか1つに記載の仮想脳外科手術シミュレータ。
【請求項5】
前記再生成された三角形メッシュの中で、一番長い辺と境界に接している辺の長さの比が所定値以下となる細い三角形メッシュを除去する除去手段を備え、この除去後に前記座標計算手段が前記座標の計算を行うことを特徴とする請求項4に記載の仮想脳外科手術シミュレータ。
【請求項1】
仮想モデルを構成する三角形メッシュを用いて病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、
吸引された部位の境界を算出するために、球の方程式で、前記仮想モデルを構成する三角形メッシュを切断する切断手段と、
吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する座標計算手段と、
前記座標計算手段で計算した点を繋げて三角形メッシュを生成する生成手段と、を備えることを特徴とする仮想脳外科手術シミュレータ。
【請求項2】
前記脳外科手術の仮想的なシミュレーションは、仮想吸引管の先端部が前記仮想脳モデルの表面に当たった状態で吸引すると、除去された仮想モデルの部位を球面の形でモデリングするものであり、前記球の方程式は、前記仮想吸引管の先端部により吸引される部位の球形状を表すものであることを特徴とする請求項1に記載の仮想脳外科手術シミュレータ。
【請求項3】
前記球の方程式は、前記仮想吸引管の先端部の中心点が球の中心、前記仮想吸引管の先端部の半径が球の半径となるものであることを特徴とする請求項2に記載の仮想脳外科手術シミュレータ。
【請求項4】
前記切断手段は、前記球の方程式と前記仮想モデルを構成する三角形メッシュとが交差する交差点を用いて三角形メッシュを再生成し、除去された部位の境界線と境界点を得ることを特徴とする請求項1ないし3のいずれか1つに記載の仮想脳外科手術シミュレータ。
【請求項5】
前記再生成された三角形メッシュの中で、一番長い辺と境界に接している辺の長さの比が所定値以下となる細い三角形メッシュを除去する除去手段を備え、この除去後に前記座標計算手段が前記座標の計算を行うことを特徴とする請求項4に記載の仮想脳外科手術シミュレータ。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−155152(P2012−155152A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−14440(P2011−14440)
【出願日】平成23年1月26日(2011.1.26)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月26日(2011.1.26)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]