
伸縮性伝送路を備えた機器
【課題】伸縮性伝送路を備えた機器において、伸縮性伝送路の使用される部位で起こる伸縮や屈曲により、伸縮性伝送路が固定部でずれることが無く、伸縮性伝送路が断線しにくい機器を提供すること。
【解決手段】伸縮性伝送路が固定具により固定された機器において、該固定具は断面が円弧状の固定面を有し、該伸縮性伝送路は該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し(但し、L(mm)は該伸縮性伝送路の弛緩時の外径である)、該伸縮性伝送路の固定部の見掛け断面積(S(mm2))が下式で表される範囲内になっていることを特徴とする機器。但し、下式において、S1(mm2)は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。
S1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)
【解決手段】伸縮性伝送路が固定具により固定された機器において、該固定具は断面が円弧状の固定面を有し、該伸縮性伝送路は該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し(但し、L(mm)は該伸縮性伝送路の弛緩時の外径である)、該伸縮性伝送路の固定部の見掛け断面積(S(mm2))が下式で表される範囲内になっていることを特徴とする機器。但し、下式において、S1(mm2)は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。
S1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、伸縮性伝送路を備えた機器に関し、伸縮または屈曲動作によるコネクター部のはずれや接続部の断線が発生しにくい伸縮性伝送路の固定方法を提供するものである。さらにケーブル余長処理が不要で、コンパクトな動作機構を有する機器を提供するものである。
【背景技術】
【0002】
一般の電線や信号ケーブル等の伝送路を固定する場合、通常、ドライバ等で伝送路をセットする固定具のネジをしめつけてゆき、しめつけにくくなった時点で、ケーブルをさわり固定されたことを確認して固定することが多い。
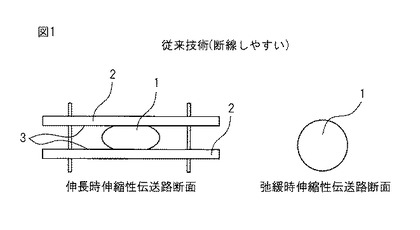
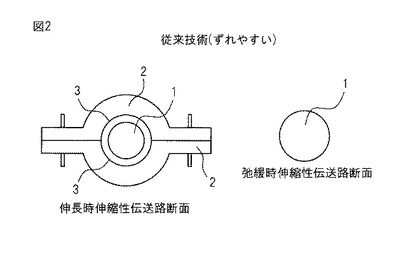
従来の伝送路は、長さ方向への伸縮性をほとんど有さないものであったが、近年、伸縮性を有する各種の伝送路が開発されつつある(下記特許文献1〜3等参照)。このような伸縮性伝送路を従来の固定具(例えば、図1のように伝送路を変形させて固定するものや、図2のように伝送路と固定具との間に隙間を有するもの)で固定する場合、伝送路の繰り返し伸縮によって固定部のズレおよび外れ等が発生しやすく、無理に締め付けると断線しやすくなるという問題が発生した。これは、伸縮性を有する伝送路ではその断面積が伸縮によって変動するが、従来の固定具では伝送路の断面積の変動が想定されていないためである。
【0003】
通常、伝送路の中にある伝送体の端は、他の機器または部品と金具またはコネクター等を介して接続されている。伝送路が伸長しないものであれば、伝送路の長さにもよるが、上記接続部以外に固定部を有する必要は特に無いが、伸縮性を有する伝送路を、上記接続部だけで固定すると、伝送路の伸縮によって接続部の外れ、破壊が起こる可能性がある。そこで、伝送路の接続部端手前に固定部を設けることが望ましいが、伸縮性を有する伝送路の固定部形状について、従来検討されたものはほとんどない。
【0004】
下記特許文献4には、弾性伸び可能な電線と接続機能部分とを結合するための、電線に複数の針体を突き刺して結合する方法及び金具が記載されている。これによって伸縮性を有する電線と金具とを固定化することが可能であるが、電線の伸縮によって接続部に応力がかかることは変わらず、前述の問題を改善できない。また、本文献記載の金具爪部を、電線を貫通させて基材に直接固定することも考えられるが、この場合固定部が爪先だけになるために、電線の伸縮による固定部のズレや外れを抑制することはできない。
【0005】
下記特許文献5には、止着力の微調整が容易であって、伸縮性のある軟弱材料で被覆された電線や光ケーブル等を止着するのに好適な止め具が開示されているが、伝送路の伸縮による伝送路断面積の変化には対応できない。
このように、伸縮性伝送路を効果的に固定する方法はいまだ見出されていない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】国際公開第2008/078780号パンフレット
【特許文献2】国際公開第2008/153071号パンフレット
【特許文献3】国際公開第2009/157070号パンフレット
【特許文献4】特開昭63−108679号公報
【特許文献5】特開2000−312421号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は伸縮性伝送路を備えた機器における伸縮性伝送路の固定方法に係わるものであり、本発明の目的は、伸縮性伝送路の使用される部位で起こる伸縮や屈曲により、伸縮性伝送路が固定部でずれることが無く、伸縮性伝送路が断線しにくい機器を提供することにある。
【課題を解決するための手段】
【0008】
本発明者等は、伸縮性伝送路の固定方法について鋭意検討を重ねた結果、弛緩時の外径がL(mm)の伸縮性伝送路を、断面が円弧状の固定面を有する固定具で機器に固定する際に、該伸縮性伝送路が該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し、該伸縮性伝送路が固定された部位において、該伸縮性伝送路の固定部の見掛け断面積S(mm2)がS1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)[但し、S1は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。]で表される範囲になるような固定構造とすることにより、固定部で伸縮伝送路がずれず、かつ伸縮繰り返しにおいて伸縮伝送路の寿命が長くなることを見出し本発明に至ったものである。
すなわち、本発明は下記の発明を提供する。
【0009】
(1)伸縮性伝送路が固定具により固定された機器において、該固定具は断面が円弧状の固定面を有し、該伸縮性伝送路は該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し(但し、L(mm)は該伸縮性伝送路の弛緩時の外径である)、該伸縮性伝送路の固定部の見掛け断面積(S(mm2))が下式で表される範囲内になっていることを特徴とする機器。
S1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)
(但し、S1(mm2)は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。)
(2)固定具の固定面のゴム硬度が30°以上100°以下である上記1項に記載の機器。
(3)伸縮性伝送路の最大伸長時の外径がLm(mm)である時に、固定具の固定面の曲率半径Drが下記式を満足する上記1または2項に記載の機器。
0.5×(Lm/2)<Dr<100×(L/2)
(4)固定具の固定面と直交する断面の端部が円弧状である上記1〜3項のいずれか一項に記載の機器。
(5)伸縮性伝送路の少なくとも固定部が弾性チューブで被覆されている上記1〜4項のいずれか一項に記載の機器。
(6)伸縮性伝送路の端接続部から0mm〜500mmの間で固定されている上記1〜5項のいずれか一項に記載の機器。
(7)伸縮性伝送路が1%以上伸長する機構および/または5°以上曲がる動作をする機構を少なくとも1箇所有する上記1〜6項のいずれか一項に記載の機器。
(8)伸縮性伝送路の両端が固定されており、中間の少なくとも1箇所に、曲率半径が0.8L以上、円弧角度が30°以上の曲面を備えたガイドを有する上記1〜7項のいずれか一項に記載の機器。
【発明の効果】
【0010】
本発明の固定構造とすることにより、伸縮を伴う部位に装着された伸縮性伝送路が伸縮によりずれることが無く、接続部の断線やコネクターがはずれず、かつ、繰り返し伸縮による断線寿命が長くなる。また、当該固定構造を有する機器は配線に係わる故障が無く、繰り返し伸縮による寿命も長い機器となる。
【図面の簡単な説明】
【0011】
【図1】従来の固定方法の一例によって伸縮伝送路が固定された模式図である。
【図2】従来の固定方法の他の一例によって伸縮伝送路が固定された模式図である。
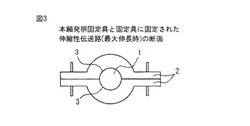
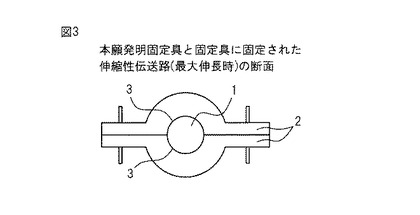
【図3】本発明の固定方法の一例によって伸縮伝送路が固定された模式図である。
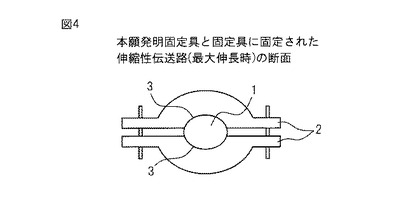
【図4】本発明の固定方法の他の一例によって伸縮伝送路が固定された模式図である。
【図5】伸縮性伝送路の固定部の見掛け断面積を算出する一例の模式図である。
【図6】伸縮性伝送路の固定部の見掛け断面積を算出する別の一例の模式図である。
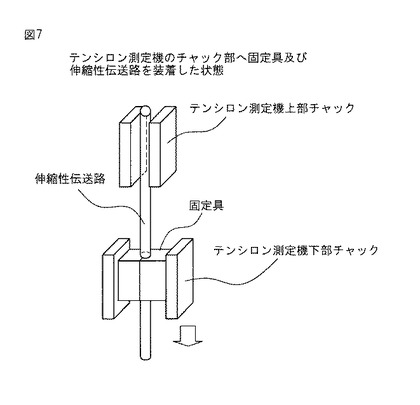
【図7】伸縮性伝送路の伸張回復率および把持性の測定方法を説明する図である。
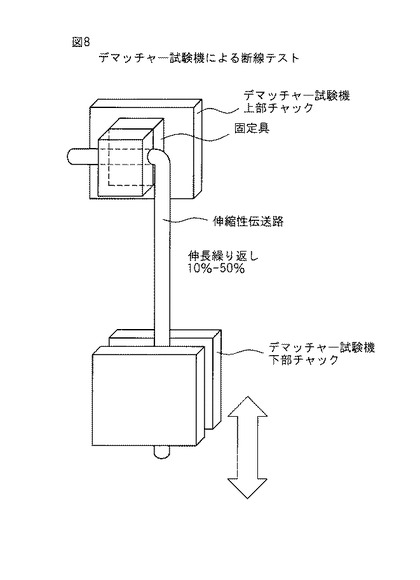
【図8】伸縮性伝送路の屈曲寿命の測定方法を説明する図である。
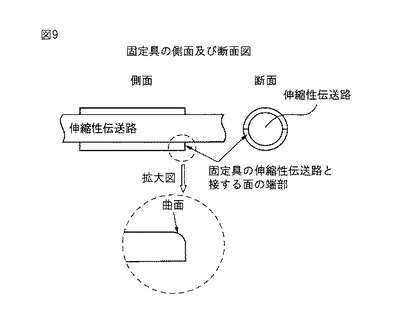
【図9】固定具の固定面の端部の形状を示す模式図である。
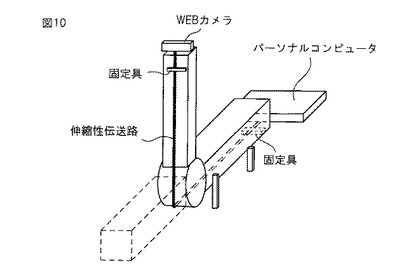
【図10】実施例7における、アクチュエータへの伸縮伝送路の固定状態を示す模式図である。
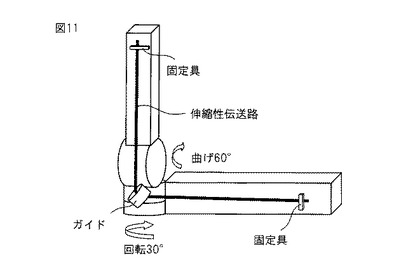
【図11】実施例8における、アクチュエータへの伸縮伝送路の固定状態を示す模式図である。
【発明を実施するための形態】
【0012】
本発明について、以下具体的に説明する。
[伸縮性伝送路]
本発明でいう伸縮性伝送路とは、10%伸長後弛緩することにより、伸長回復率(測定方法は後述する)が50%以上であるものを言う。
伸縮性伝送路には、電流を伝送する電力伝送路、電気信号を伝送する電気信号伝送路、光を伝送する光伝送路、光信号を伝送する光信号伝送路、熱を伝送する熱伝送路、液体を伝送する液体伝送路および気体を伝送する気体伝送路がある。これらは単独でも、複合されたものでもよい。電力伝送路の代表的なものは、弾性体の周囲に銅線やアルミ線をらせん状に捲回した伸縮電線がある。信号伝送路の代表的なものは、電気信号伝送線や光信号伝送線がある。伸縮性電気信号伝送線は、2本以上の導体線を弾性体の周囲に同一方向に捲回したものや、交差して捲回したものが知られる。光信号伝送線は、マルチコア型のプラスチック光ファイバやフッ素系光ファイバなどを弾性体の周囲にらせん状に捲回したものがある。熱伝送路はニクロム線を弾性体の周囲に捲回したものがある。また、伸縮性液体伝送路及び伸縮性気体伝送路は、チューブを弾性体の周囲に捲回したものがある。またこれらに限定されるものではなく、伸縮性を有し電気、電磁波、光、熱、気体および液体等を伝送するものであればいずれでもよい。
【0013】
[伸縮性伝送路の最大伸長率(a%)]
本発明でいう伸縮伝送路の最大伸長率は下記式により求めることができる。即ち、固定部位間の最大距離(Lmax)と当該部位間に配置された伸縮伝送路の弛緩時長さ(Ls)から下式によって求める。
最大伸長率a(%)=100×(Lmax−Ls)/Ls
ここで、Lmaxは固定部位間の取り得る最大距離であり、Lsは当該部位間に配置された伸縮伝送路の弛緩時長さである。ただし、Lmaxを機械的に定めることができない場合は、伸縮性伝送路の伸長回復率が50%未満となる最大の伸長率Ecの0.8倍とする。前者は、例えば運動するロボットアームの2点間で伸縮性伝送体が固定されている場合に相当し、後者は、例えばコンピュータ用マウスコードのように、装置上はコードの伸長限界が定まっていない場合に相当する。
【0014】
[伸縮性伝送路の固定部]
本発明で言う伸縮性伝送路の固定部とは、伸縮性伝送路において固定具によって把持される部分であり、固定部の断面の周方向に、伸縮性伝送路の外周の50%以上が固定具と接して把持されていることが必要である。固定具と接している部分がこれ未満の場合は、把持の力が局部的に集中するため、伸縮性伝送路が断線しやすくなる。
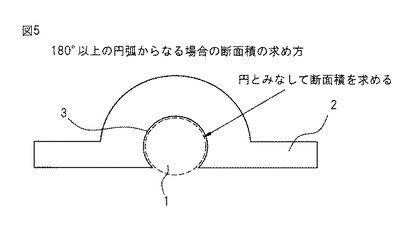
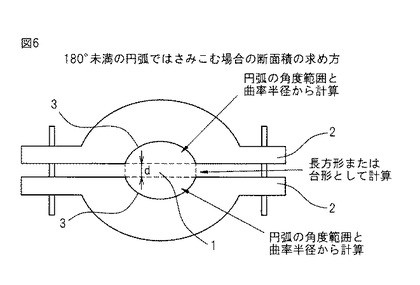
伸縮性伝送路の外周の50%以上が固定具と接して把持されるためには、固定具が円弧状の固定面を有し、その固定面に伸縮性伝送路を把持させることが好ましい。伸縮性伝送路の外周の50%以上を固定面と接しさせるためには、180°以上の円弧からなる固定面を有する固定具を用いる方法と(図5参照)、180°以下の円弧からなる固定面を持つ2つの固定具でハサミこむ方法がある(図6参照)。
【0015】
本発明で言う伸縮性伝送路の固定部の見掛け断面積(Smm2)とは、伸縮性伝送路が固定される部分の見掛け断面積を言う。180°以上の円弧からなる固定面を持つ固定具を用いた場合の伸縮性伝送路の固定部の見掛け断面積は円弧を外挿した円の面積をいう(図5参照)。180°以下の円弧からなる固定面を有する2つの固定具ではさみこむ場合は、双方の円弧の断面積と双方の円弧両端をはさみこむ距離dを介して直線で結んだときに得られる長方形の面積とを合わせた値をいう(図6参照)。いずれの場合も、伸縮性伝送路の固定部の見掛け断面積が、弛緩時の伸縮性伝送路の断面積S1mm2に対し、次の式で表される範囲の断面積を持つように固定されることが重要である。
S1×(1/√((100+a)/100)≧S≧0.5S1×(1/√((100+a)/100)[但し、S1は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。]
ただし、伸縮性伝送路の弛緩時断面積は、弛緩時の伸縮性伝送路の直径を任意に3箇所測定した平均値から求めた値より算出される断面積をいう。
【0016】
本発明は、伸縮性伝送路の固定部の見掛け断面積をこの範囲に設定することで、伸縮性伝送路が伸張変形しても、伸縮性伝送路がしっかり固定され、ずれることが無く、かつ繰り返し伸縮による寿命が低下しないという相反する課題を両立させる驚くべき効果があることを見出したものである。
SがS1×(1/√((100+a)/100)より大きい場合は、最大伸長時に、固定部の把持力が不足し、伸縮性伝送路が固定具の固定面から引き出され、伸長荷重が端子接続部やコネクターにかかり、接続部の断線や、コネクターのはずれが発生しやすくなる。一方、0.5×S1×(1/√((100+a)/100)より小さい場合、伸縮性伝送路の締め付けが強くなりすぎ、内部伝送体を変形させるため、伸縮性伝送路の断線が発生しやすくなる。さらに、伸長により伸縮性伝送路が局部変形し、繰り返し伸縮による寿命が短くなる。好ましくは0.6×S1×(1/√((100+a)/100)以上0.9×S1×1/√((100+a)/100)以下の範囲である。
【0017】
また、伸縮性伝送路の固定部は、固定具の固定面に接して把持される長さがL/5(mm)以上必要である。これ未満の場合は、把持力が弱くなるか、伸縮性伝送路にかかる力が局部に集中し断線しやすくなり、本発明の目的を達成することができない。より好ましくはL/2以上である。さらに好ましくはL以上である。上限は特に限定されないが、固定部の長さを長くしすぎると伸縮できる距離が短くなるため、概ね20L以下が好ましい。より好ましくは10L以下である。さらに好ましくは5L以下である。
なおここで、固定部の長さとは、伸縮性伝送路の固定されている部位の両端間距離を示し、この間の全ての部分で固定されていても良く、例えば複数の爪状部材で固定されるように、部分的に固定されていない部分を有していても良い。
【0018】
[固定具]
本発明に用いる固定具は、上述したように、円弧状の固定面を有し、その固定面に伸縮性伝送路を把持させる。従って、固定面の長さはL/5以上必要である。
伸縮性伝送路の外周の50%以上を固定面と接しさせるに、180°以上の円弧からなる固定面を有する固定具を用いる方法は、180°以上の円弧からなる固定面を有する1つの固定具を用いてもよいし、複数の固定具を用いて180°以上の円弧からなる固定面を形成してもよい。
一つの固定具を用いる場合、固定面の円弧角度は180°以上が必要である。これ未満の場合、把持力が得られない。より好ましくは240°以上である。270°未満の円弧としておくと、開放部があり、伸縮性伝送路をとりはずししやすいという利点がある。
【0019】
次に複数の固定具を用いる場合について説明する。
一つの固定具は210°以下の円弧形状の固定面を有するものであり、他の固定具の固定面は直線形状でも、円弧形状でもよい。円弧形状の固定面を有する場合は210°未満の円弧であることが好ましい。210°以上の円弧同志で挟み込むと、エッジ部に応力が集中することがあり好ましくない。より好ましくは180°以下である。この場合は、各々の円弧の角度は同じであっても別々であってもよい。
いずれの場合も、伸縮性伝送路の固定部が本発明でいう断面積となるようにして固定することが必要である。
【0020】
次に2つの固定具で挟み込む場合についてより具体的に説明する。
2つの固定具で挟み込む場合は、各々がセパレートしていても、片側が接続されていてもよい。各々がセパレートされているものは、ネジや、あらかじめ定められた凹凸部へのかみ合わせなどで、2つの固定具で挟み込むことができる。2つの固定具の距離は、厚みゲージで測定するか、あらかじめ目印をつけておくか、あるいは、スペーサを介在させることにより決めることができる。片側が接続されているものにおいては開放されている側を上記と同様に固定し、本発明の断面積を得ることができる。同様にして、3つ以上の固定具で挟み込んでもよい。
【0021】
本発明の固定具の伸縮性伝送路と接する固定面の硬度は、ゴム硬度で30°以上100°以下が好ましい。さらに好ましくは50°〜95°、特に好ましくは70°〜90°である。30°未満の場合は伸縮による伸縮性伝送路の断面積が変化するとずれることがある。100°を越えると固定具の端と伸縮伝送路が局部的に接触する部分に応力集中し、断線しやすくなる。弾性樹脂を用いて固定具を作ること、または金属やプラスチック製の固定具の固定面表面に弾性樹脂層を設けることにより上記硬度を得ることができる。
また、伸縮性伝送路をあらかじめ上記硬度を有する弾性樹脂チューブで被覆しておき、伸縮性伝送路と固定具との間に当該弾性樹脂チューブを介在させて固定してもよい。
あらかじめ弾性樹脂チューブで被覆した伸縮性伝送路は、チューブ内径が伸縮性伝送路の伸長限界時直径以上のチューブへあらかじめ伸縮性伝送路を挿入しておくことにより得ることができる。被覆するチューブとして伸縮伝送路の弛緩時直径相当の熱収縮チューブを用いると、伸縮性伝送路を挿入しやすいという利点があり、さらに、固定部へチューブを移動しやすく、固定部にて熱収縮させることにより、本発明の固定部の断面積とすることができるため、特に好ましい。
【0022】
本発明の固定具の円弧状の固定面の曲率半径Drは、0.5(Lm/2)<Dr<100(L/2)の範囲であることが好ましい。ここで、L(mm)は伸縮伝送路の弛緩時の外径であり、Lm(mm)は最大伸長時の外径である。曲率半径Drが100×L/2以上の場合、伸縮性伝送路と円弧状の固定面との接触が、点接触に近づき、把持力が得られなくなるか、または、伸縮性伝送路が大きく変形せざるを得なくなる。より好ましくは50×L/2以下である。さらに好ましくは10×L/2以下である。曲率半径Drが0.5×Lm/2以下の場合は伸縮性伝送路を固定面に沿わせることが困難となりむしろ断線しやすくなることがある。より好ましくは0.6×Lm/2以上であり、特に好ましくは0.7×Lm/2以上である。
このような範囲の曲率を持った円弧状固定面とすることで、伸縮性伝送路が最大伸張されても周方向の5割以上を固定具と接するようにしやすく、しっかり把持でき、かつ、伸張及び屈曲時に局部的な応力集中を防ぐことができ、断線しにくい固定構造とすることができる。
【0023】
本発明の固定具の固定面の長さ方向の端部の形状は丸みを帯びた形状(図9参照)であることが好ましい。より具体的には、伸縮性伝送路の最大伸長時の外径をLm(mm)とした場合に、固定面と直交する断面の端部が、曲率半径TrがLm/100以上であり、角度範囲が10°〜180°である円弧であることが好ましい。曲率半径はさらに好ましくはLm/10以上であり、特に好ましくはLm以上である。角度範囲は、より好ましくは30°〜180°、さらに好ましくは60°〜180°である。これは、固定具の端では、伸縮性伝送路は多様な方向へ伸長されることがあり、固定具の端での接触が伸縮性伝送路の表面を傷つけるためである。
【0024】
[伸縮性伝送路の端接続部]
本発明でいう伸縮性伝送路の端接続部とは、伸縮性伝送路の中にある伝送体の端を他の機器または部品へ接続する部分を言う。伝送体として銅線を使用した伸縮性電力伝送路を例に取ると、伝送体である銅線の端は圧着端子に圧着されるか、コネクターの部品であるコンタクトへ圧着またはハンダ付けされるか、電子機器の基板などにハンダ付けされる。この端子へ圧着された部分、コンタクトへ圧着した部分、または基板などへハンダ付けした部分が、伸縮性伝送路の端接続部となる。
この接続部は外力により断線しやすいため、外力が接続部に及ばないようにすることが、本発明の固定構造を備えた機器の寿命を長くするために重要である。伸縮性伝送路の端接続部から0mm〜500mmの間に本発明の固定構造を備えることにより、機器の断線寿命を長くすることができる。
【0025】
[機器]
本発明で言う伸縮性伝送路が装着されている機器とは、例えば心電計、脈拍計および血圧計などのバイタルデータモニタリング装置、アシストスーツ、モーションキャプチャー、ウエアラブルコンピュータ、義肢、義足、ブレインマスター、イヤホンコードおよびアイグラスなどの身体装着型電子機器、産業ロボット、フューマノイドロボットおよびホビーロボットなど動作機構を有するロボット、内視鏡および超音波診断計などケーブルでつながったセンサやカメラ、並びにモバイル機器周辺のACアダプターおよびマウスなどを挙げることができるが、これらに限定されるものではない。
いずれの場合も、伸縮性伝送路の少なくとも1箇所が電子機器または電気デバイスまたは光受発信機器などに接続されており、他端が装置、機器および衣服などに固定され伸長されるものであったり、または他端を例えば手で引っ張るなどして外部からの力で伸長されるものをいう。
【0026】
本発明の固定構造は、1%以上伸縮または5°以上屈曲する部位に伸縮性伝送路が装着された機器に特に有効である。本発明の機器は、本発明の固定構造を有することにより、接続部の接続不良を減らすことができる。
伸縮性がほとんどない通常の伝送路を使用すると、伝送路を1%以上伸長すると、コネクターやハンダ接続部がはずれ、接続部の接続不良が発生する。伸縮性伝送路を用いることにより、接続部の不良を減らすことができるが、本発明の固定構造を有することで、接続部の不良をさらに減らすことができる。
【0027】
[ガイド]
伸縮性伝送路の両末端を前述の固定構造とする場合、その中間部において、伸縮性伝送路と機器との位置を規制するためのガイドを有することが好ましい。ガイドは、当該中間部を構成する部品に溝や穴として存在してもよく、別途ガイドを当該部品に取り付けてもよい。本発明におけるガイドは、弛緩時外径がL(mm)の伸縮性伝送路を沿わせるガイドであり、そのガイドは、曲率半径が0.8L以上20L未満のガイドが好ましい。0.8L未満とすると、弛緩時にガイドからはみ出し、ガイドはずれを起こす。より好ましくは1L以上であり、さらに好ましくは1.2L以上である。曲率半径が20L以上になるとガイドが大きくなりすぎ実用上好ましくない。好ましくは10L以下である。さらに好ましくは5L以下である。円弧角度は30°以上が好ましい。これ未満の場合は、ガイドからはずれやすくなる。より好ましくは60°以上、さらに好ましくは90°以上。特に好ましくは180°以上である。
あらかじめ2つの部品に分かれているものを、伸縮性伝送路を挟み込む形で合体させてガイドとすることもできる。また、リング状のガイドは、伸縮性伝送路にあらかじめ装着しておき、そのガイドを機器の所定の位置に固定してもよい。本発明のガイドは、伸縮性伝送路がすべりやすい表面状態であることが好ましい。
材質は、特に限定されないが、硬度はゴム硬度90°以上であることが好ましい。これ以下の場合は、摩擦が強くなりすぎすべりが阻害される。より好ましくはビッカース硬さ10Hv以上、さらに好ましくはビッカース硬さ20Hv以上である。表面粗度は算術平均粗さで0.01μ〜100μの範囲が好ましい。0.01μ以下の場合は、摩擦が強くなり、100μ以上の場合は凹凸が激しく、伸縮性伝送路の表面及び導体を劣化させることがある。より好ましくは0.1μ〜10μである。金属材料の場合は、所謂梨地加工が好ましい。セラミック材料の場合は、内部に形成する粒子形によってコントロールすることができる。
装着された機器において伸縮性伝送路が曲げられる部分がある場合は、その曲げの頂点になる部分にガイドがあることが好ましい。
このようにすることで、伸縮してもガイドのはずれることが無く、屈曲部などの伸縮性伝送路を所定の位置を沿わせて配線することができる。
【0028】
すなわち、本発明は、従来の伸縮性のないケーブルでは余長が必要な屈曲や伸張を伴う部位に、本発明の固定構造を有するように、また必要に応じてガイドを用いて伸縮性伝送路を装着することにより、機器に必要なケーブル予長分のスペースを無くし、かつ、伸縮性伝送路の断線トラブルを無くすことができる画期的な技術である。
【実施例】
【0029】
以下実施例に基づきさらに詳細に説明するが、本発明はこれらの実施例のみに限定されるものではない。なお、本発明で用いた評価方法は次の通りである。
(1)伸縮性伝送路の伸張回復率
長さ100mmの試料をテンシロン測定機に図7に示すようにセットして、引張り速度100mm/minで引張り、所定伸張後リターンし、応力がゼロになる距離(Amm)を求め次式により回復率を求めた。
回復率(%)=((100−A)/100)×100
(2)伸縮性伝送路の外径
ノギスにより任意に5箇所を測定しその平均値を外径とした。
(3)固定具固定面の表面硬度
JIS−K−6253に基づいてデユロメータを用いて測定した。
【0030】
(4)把持性
測定部試料長100mmで伸縮性伝送路を固定具に固定し、テンシロン測定機に図7に示すようにセットして、引張り速度10mm/minで最大伸長率まで引張り、この間に固定部のずれが発生するか否かで判定した。
○ 固定部がずれない。
× 固定部がずれる。
【0031】
(5)屈曲寿命
図8に示すように、伸縮性伝送路を固定具に固定してデマッチャー試験機にセットし、固定具出口で90°に曲げ、固定具出口より20cm下で、下部を把持し、下記条件で繰り返し伸長試験を実施した。
曲げ角度:90°
伸縮範囲:10%−a%
伸縮速度:100回/min
装置名 :デマッチャー試験機(大栄科学精機製)
測定器 :(株)住井酸素工業所製 5連式連続電気抵抗測定装置
断線判定:電気抵抗値が20%以上大きくなった点を断線と判定した。
断線までの伸縮回数から、以下の基準で屈曲寿命を判定した。
× 10万回未満
○ 10万回以上50万回未満
◎ 50万回以上
【0032】
[実施例1]
940dtexのポリウレタン弾性長繊維(旭化成せんい(株)製、商品名:ロイカ)を芯にして、伸張倍率を4.2倍下で、220dtexのウーリーナイロン(黒染め糸)を700T/Mの下撚りおよび500T/Mの上撚りで捲回し、ダブルカバー糸を得た。得られたダブルカバー糸を製紐用ボビンに巻き取り、当該ボビン4本を、8本打ち製紐機((有)桜井鉄工製)のS方向に2本、Z方向に2本、均等に配置し組み紐を作成し直径1.8mmの弾性円筒体を得た。当該弾性円筒体を、独自に開発した設備(特殊製紐機:(1)芯部を複数のV溝にクロスして沿わせ(所謂8の字掛け)把持し所定の速度でフィードする機構。(2)該芯部を複数のV溝にクロスして沿わせ把持し、一定速度で巻き上げる機構。(3)芯部を伸長した状態で、導体線を並列に巻き付ける機構 (4)上記の(1)および(2)に加え芯部を伸長した状態で、導体線の捲回方向と逆方向に導体線の内周と外周を通って他の糸状体を捲回する機構(導体線を巻いたボビンと他の糸状体を巻いたボビンが、前後に移動し、相互に逆方向に旋回する)を有する設備)により、2.2倍伸長しながら、所定の導体線(2USTC(有)竜野電線製)4本をZ方向に並列に捲回し、S方向にエステル(56dtex(12f))を4本導体線の内側と外側を通して捲回し、導体線捲回品を得た。当該導体線捲回品を1.8倍伸長下で、16本打ち製紐機にてエステルウーリー(330dtex2本合わせ)により外部被覆を行ない、直径3.8mmの伸縮性伝送路を得た。この伸縮性伝送路の伸長回復率が50%未満となる最大の伸長率は90%であった。また、この伸縮性伝送路を持いる機器として、機器上での最大伸長率が50%となる場合を想定して把持性及び屈曲寿命を以下の手順で調べた。
この伸縮性伝送路を、図3に示すように、固定面断面が曲率半径1.5mm、角度範囲180°の円弧である2つのステンレス製固定具で挟み、テンシロン測定機にて把持性を調べた。また、この固定具で挟んだ伸縮性伝送路をデマッチャー試験機(図8参照)にて繰り返し伸縮を行い、屈曲寿命を判定した。結果を伸縮性伝送路および固定具の諸特性と共に表1に示す。
【0033】
[実施例2〜7、比較例1]
固定具の素材や形状を変化させたことを除いて実施例1と同様に実施した。結果を伸縮性伝送路および固定具の諸特性と共に表1に併せて示す。
なお、実施例2では、内径4mm、長さ6mmの熱収縮チューブ(収縮後肉厚0.25mm)(レイケムVERSAFIT V2)を伸縮性伝送路の固定位置にドライヤーで熱をかけ熱収縮させたものを表1記載のステンレス製固定具で挟んで本発明の固定構造とした。また、実施例5では、内径4mm、長さ6mmの接着剤付熱収縮チューブ(収縮後肉厚0.7mm)を、伸縮性伝送路の固定位置にドライヤーで熱をかけ固定し、固定面断面が曲率半径2.1mm、角度範囲180°の円弧であり、端部形状が曲率半径2mmの円弧である2つのステンレス製固定具に挟み本発明の固定構造とした。
【0034】
[比較例2]
実施例1で得られた伸縮性伝送路を2枚のステンレス製平板の間に間隔2mmとなるように把持して、テンシロン測定機による把持性判定と、デマッチャー試験機による屈曲寿命判定を行なった。結果を表1に示す。
以上の結果から本発明の固定構造は、従来技術ではなし得なかった、長寿命を実現するきわめて重要な技術であることがわかる。
【0035】
[実施例8]
図10に示すように、最大曲げ角度が90°の100mm角のアームを有するアクチュエータのアーム外層に、実施例1の伸縮性伝送路を沿わせ、アームを伸張した状態で、アーム屈曲部から両側へ各20cmの位置で実施例2の方法で固定した。このとき伸縮性伝送路は10%伸張した状態で固定されている。動作側のアームにおける伸縮性伝送路の端接続部を固定部端から20mm先のWEBカメラ(ELECOM社製 UCAM−DLP130TSV))と接続し、固定側のアームにおける伸縮性伝送路の端接続部を固定部端から500mm先のパーソナルコンピュータと接続して、アーム作動を確認した。
この結果、作動により、カメラ映像が途絶えることがなく、固定部で伸縮性伝送路がずれることが無く、取り付けたデバイスに不具合が発生せず、かつ、アーム部の外側に配線が飛び出すことも無い、画期的な機器を得ることができた。
【0036】
参考までに、一般ロボットケーブル(スリムロボットケーブル KRT(共和電線産業(株)社製)を同様のアームとカメラとパーソナルコンピュータを備えた機器へ、アームを90°曲げた状態(最大伸張状態)で、たるみが無い様に取りつけ、このアームの屈伸を行なったところ、アーム伸張時には、アームから最大で5cm近くのところまでケーブルが飛び出すことが確認された。このことから、従来技術では、このケーブル余長処理のスペースが必要となり、アーム構造が大きくならざるを得ないことがわかる。
【0037】
[実施例9]
図11に示すように、回転角度30°、曲げ角度60°の2方向に動作するアームの屈曲部へ、内径15mmのセラミックガイド N507014(湯浅糸道工業株式会社製)を取り付け、このガイドへ実施例1の伸縮性伝送路を通し、実施例7と同様にアーム屈曲部から両側へ各20cmの位置で実施例2の方法で固定した。この装置を繰り返し100回動作させた。伸縮性伝送路は最後まで、初期の配線位置からずれず、飛び出さず、きわめて安定な動作をした。
なお、同様の装置に一般ロボットケーブルを最大距離にて配線して動作を試みたところ、ケーブルがたるんだときにケーブルがガイドにひっかかったり、伸張時にケーブルがつっぱってケーブルが固定部からはずれるというトラブルが発生し正常に動作することができなかった。
【0038】
【表1】

【産業上の利用可能性】
【0039】
本発明の伸縮性伝送線の固定構造を備えた機器は、伸縮性伝送路が初期の配線位置からずれず、飛び出さず、きわめて安定な動作をし、特に、複雑な動きをする多関節ロボットや身体装着機器として最適である。
【符号の説明】
【0040】
1 伸縮性伝送路
2 固定具
3 固定面
【技術分野】
【0001】
本発明は、伸縮性伝送路を備えた機器に関し、伸縮または屈曲動作によるコネクター部のはずれや接続部の断線が発生しにくい伸縮性伝送路の固定方法を提供するものである。さらにケーブル余長処理が不要で、コンパクトな動作機構を有する機器を提供するものである。
【背景技術】
【0002】
一般の電線や信号ケーブル等の伝送路を固定する場合、通常、ドライバ等で伝送路をセットする固定具のネジをしめつけてゆき、しめつけにくくなった時点で、ケーブルをさわり固定されたことを確認して固定することが多い。
従来の伝送路は、長さ方向への伸縮性をほとんど有さないものであったが、近年、伸縮性を有する各種の伝送路が開発されつつある(下記特許文献1〜3等参照)。このような伸縮性伝送路を従来の固定具(例えば、図1のように伝送路を変形させて固定するものや、図2のように伝送路と固定具との間に隙間を有するもの)で固定する場合、伝送路の繰り返し伸縮によって固定部のズレおよび外れ等が発生しやすく、無理に締め付けると断線しやすくなるという問題が発生した。これは、伸縮性を有する伝送路ではその断面積が伸縮によって変動するが、従来の固定具では伝送路の断面積の変動が想定されていないためである。
【0003】
通常、伝送路の中にある伝送体の端は、他の機器または部品と金具またはコネクター等を介して接続されている。伝送路が伸長しないものであれば、伝送路の長さにもよるが、上記接続部以外に固定部を有する必要は特に無いが、伸縮性を有する伝送路を、上記接続部だけで固定すると、伝送路の伸縮によって接続部の外れ、破壊が起こる可能性がある。そこで、伝送路の接続部端手前に固定部を設けることが望ましいが、伸縮性を有する伝送路の固定部形状について、従来検討されたものはほとんどない。
【0004】
下記特許文献4には、弾性伸び可能な電線と接続機能部分とを結合するための、電線に複数の針体を突き刺して結合する方法及び金具が記載されている。これによって伸縮性を有する電線と金具とを固定化することが可能であるが、電線の伸縮によって接続部に応力がかかることは変わらず、前述の問題を改善できない。また、本文献記載の金具爪部を、電線を貫通させて基材に直接固定することも考えられるが、この場合固定部が爪先だけになるために、電線の伸縮による固定部のズレや外れを抑制することはできない。
【0005】
下記特許文献5には、止着力の微調整が容易であって、伸縮性のある軟弱材料で被覆された電線や光ケーブル等を止着するのに好適な止め具が開示されているが、伝送路の伸縮による伝送路断面積の変化には対応できない。
このように、伸縮性伝送路を効果的に固定する方法はいまだ見出されていない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】国際公開第2008/078780号パンフレット
【特許文献2】国際公開第2008/153071号パンフレット
【特許文献3】国際公開第2009/157070号パンフレット
【特許文献4】特開昭63−108679号公報
【特許文献5】特開2000−312421号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は伸縮性伝送路を備えた機器における伸縮性伝送路の固定方法に係わるものであり、本発明の目的は、伸縮性伝送路の使用される部位で起こる伸縮や屈曲により、伸縮性伝送路が固定部でずれることが無く、伸縮性伝送路が断線しにくい機器を提供することにある。
【課題を解決するための手段】
【0008】
本発明者等は、伸縮性伝送路の固定方法について鋭意検討を重ねた結果、弛緩時の外径がL(mm)の伸縮性伝送路を、断面が円弧状の固定面を有する固定具で機器に固定する際に、該伸縮性伝送路が該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し、該伸縮性伝送路が固定された部位において、該伸縮性伝送路の固定部の見掛け断面積S(mm2)がS1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)[但し、S1は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。]で表される範囲になるような固定構造とすることにより、固定部で伸縮伝送路がずれず、かつ伸縮繰り返しにおいて伸縮伝送路の寿命が長くなることを見出し本発明に至ったものである。
すなわち、本発明は下記の発明を提供する。
【0009】
(1)伸縮性伝送路が固定具により固定された機器において、該固定具は断面が円弧状の固定面を有し、該伸縮性伝送路は該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し(但し、L(mm)は該伸縮性伝送路の弛緩時の外径である)、該伸縮性伝送路の固定部の見掛け断面積(S(mm2))が下式で表される範囲内になっていることを特徴とする機器。
S1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)
(但し、S1(mm2)は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。)
(2)固定具の固定面のゴム硬度が30°以上100°以下である上記1項に記載の機器。
(3)伸縮性伝送路の最大伸長時の外径がLm(mm)である時に、固定具の固定面の曲率半径Drが下記式を満足する上記1または2項に記載の機器。
0.5×(Lm/2)<Dr<100×(L/2)
(4)固定具の固定面と直交する断面の端部が円弧状である上記1〜3項のいずれか一項に記載の機器。
(5)伸縮性伝送路の少なくとも固定部が弾性チューブで被覆されている上記1〜4項のいずれか一項に記載の機器。
(6)伸縮性伝送路の端接続部から0mm〜500mmの間で固定されている上記1〜5項のいずれか一項に記載の機器。
(7)伸縮性伝送路が1%以上伸長する機構および/または5°以上曲がる動作をする機構を少なくとも1箇所有する上記1〜6項のいずれか一項に記載の機器。
(8)伸縮性伝送路の両端が固定されており、中間の少なくとも1箇所に、曲率半径が0.8L以上、円弧角度が30°以上の曲面を備えたガイドを有する上記1〜7項のいずれか一項に記載の機器。
【発明の効果】
【0010】
本発明の固定構造とすることにより、伸縮を伴う部位に装着された伸縮性伝送路が伸縮によりずれることが無く、接続部の断線やコネクターがはずれず、かつ、繰り返し伸縮による断線寿命が長くなる。また、当該固定構造を有する機器は配線に係わる故障が無く、繰り返し伸縮による寿命も長い機器となる。
【図面の簡単な説明】
【0011】
【図1】従来の固定方法の一例によって伸縮伝送路が固定された模式図である。
【図2】従来の固定方法の他の一例によって伸縮伝送路が固定された模式図である。
【図3】本発明の固定方法の一例によって伸縮伝送路が固定された模式図である。
【図4】本発明の固定方法の他の一例によって伸縮伝送路が固定された模式図である。
【図5】伸縮性伝送路の固定部の見掛け断面積を算出する一例の模式図である。
【図6】伸縮性伝送路の固定部の見掛け断面積を算出する別の一例の模式図である。
【図7】伸縮性伝送路の伸張回復率および把持性の測定方法を説明する図である。
【図8】伸縮性伝送路の屈曲寿命の測定方法を説明する図である。
【図9】固定具の固定面の端部の形状を示す模式図である。
【図10】実施例7における、アクチュエータへの伸縮伝送路の固定状態を示す模式図である。
【図11】実施例8における、アクチュエータへの伸縮伝送路の固定状態を示す模式図である。
【発明を実施するための形態】
【0012】
本発明について、以下具体的に説明する。
[伸縮性伝送路]
本発明でいう伸縮性伝送路とは、10%伸長後弛緩することにより、伸長回復率(測定方法は後述する)が50%以上であるものを言う。
伸縮性伝送路には、電流を伝送する電力伝送路、電気信号を伝送する電気信号伝送路、光を伝送する光伝送路、光信号を伝送する光信号伝送路、熱を伝送する熱伝送路、液体を伝送する液体伝送路および気体を伝送する気体伝送路がある。これらは単独でも、複合されたものでもよい。電力伝送路の代表的なものは、弾性体の周囲に銅線やアルミ線をらせん状に捲回した伸縮電線がある。信号伝送路の代表的なものは、電気信号伝送線や光信号伝送線がある。伸縮性電気信号伝送線は、2本以上の導体線を弾性体の周囲に同一方向に捲回したものや、交差して捲回したものが知られる。光信号伝送線は、マルチコア型のプラスチック光ファイバやフッ素系光ファイバなどを弾性体の周囲にらせん状に捲回したものがある。熱伝送路はニクロム線を弾性体の周囲に捲回したものがある。また、伸縮性液体伝送路及び伸縮性気体伝送路は、チューブを弾性体の周囲に捲回したものがある。またこれらに限定されるものではなく、伸縮性を有し電気、電磁波、光、熱、気体および液体等を伝送するものであればいずれでもよい。
【0013】
[伸縮性伝送路の最大伸長率(a%)]
本発明でいう伸縮伝送路の最大伸長率は下記式により求めることができる。即ち、固定部位間の最大距離(Lmax)と当該部位間に配置された伸縮伝送路の弛緩時長さ(Ls)から下式によって求める。
最大伸長率a(%)=100×(Lmax−Ls)/Ls
ここで、Lmaxは固定部位間の取り得る最大距離であり、Lsは当該部位間に配置された伸縮伝送路の弛緩時長さである。ただし、Lmaxを機械的に定めることができない場合は、伸縮性伝送路の伸長回復率が50%未満となる最大の伸長率Ecの0.8倍とする。前者は、例えば運動するロボットアームの2点間で伸縮性伝送体が固定されている場合に相当し、後者は、例えばコンピュータ用マウスコードのように、装置上はコードの伸長限界が定まっていない場合に相当する。
【0014】
[伸縮性伝送路の固定部]
本発明で言う伸縮性伝送路の固定部とは、伸縮性伝送路において固定具によって把持される部分であり、固定部の断面の周方向に、伸縮性伝送路の外周の50%以上が固定具と接して把持されていることが必要である。固定具と接している部分がこれ未満の場合は、把持の力が局部的に集中するため、伸縮性伝送路が断線しやすくなる。
伸縮性伝送路の外周の50%以上が固定具と接して把持されるためには、固定具が円弧状の固定面を有し、その固定面に伸縮性伝送路を把持させることが好ましい。伸縮性伝送路の外周の50%以上を固定面と接しさせるためには、180°以上の円弧からなる固定面を有する固定具を用いる方法と(図5参照)、180°以下の円弧からなる固定面を持つ2つの固定具でハサミこむ方法がある(図6参照)。
【0015】
本発明で言う伸縮性伝送路の固定部の見掛け断面積(Smm2)とは、伸縮性伝送路が固定される部分の見掛け断面積を言う。180°以上の円弧からなる固定面を持つ固定具を用いた場合の伸縮性伝送路の固定部の見掛け断面積は円弧を外挿した円の面積をいう(図5参照)。180°以下の円弧からなる固定面を有する2つの固定具ではさみこむ場合は、双方の円弧の断面積と双方の円弧両端をはさみこむ距離dを介して直線で結んだときに得られる長方形の面積とを合わせた値をいう(図6参照)。いずれの場合も、伸縮性伝送路の固定部の見掛け断面積が、弛緩時の伸縮性伝送路の断面積S1mm2に対し、次の式で表される範囲の断面積を持つように固定されることが重要である。
S1×(1/√((100+a)/100)≧S≧0.5S1×(1/√((100+a)/100)[但し、S1は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。]
ただし、伸縮性伝送路の弛緩時断面積は、弛緩時の伸縮性伝送路の直径を任意に3箇所測定した平均値から求めた値より算出される断面積をいう。
【0016】
本発明は、伸縮性伝送路の固定部の見掛け断面積をこの範囲に設定することで、伸縮性伝送路が伸張変形しても、伸縮性伝送路がしっかり固定され、ずれることが無く、かつ繰り返し伸縮による寿命が低下しないという相反する課題を両立させる驚くべき効果があることを見出したものである。
SがS1×(1/√((100+a)/100)より大きい場合は、最大伸長時に、固定部の把持力が不足し、伸縮性伝送路が固定具の固定面から引き出され、伸長荷重が端子接続部やコネクターにかかり、接続部の断線や、コネクターのはずれが発生しやすくなる。一方、0.5×S1×(1/√((100+a)/100)より小さい場合、伸縮性伝送路の締め付けが強くなりすぎ、内部伝送体を変形させるため、伸縮性伝送路の断線が発生しやすくなる。さらに、伸長により伸縮性伝送路が局部変形し、繰り返し伸縮による寿命が短くなる。好ましくは0.6×S1×(1/√((100+a)/100)以上0.9×S1×1/√((100+a)/100)以下の範囲である。
【0017】
また、伸縮性伝送路の固定部は、固定具の固定面に接して把持される長さがL/5(mm)以上必要である。これ未満の場合は、把持力が弱くなるか、伸縮性伝送路にかかる力が局部に集中し断線しやすくなり、本発明の目的を達成することができない。より好ましくはL/2以上である。さらに好ましくはL以上である。上限は特に限定されないが、固定部の長さを長くしすぎると伸縮できる距離が短くなるため、概ね20L以下が好ましい。より好ましくは10L以下である。さらに好ましくは5L以下である。
なおここで、固定部の長さとは、伸縮性伝送路の固定されている部位の両端間距離を示し、この間の全ての部分で固定されていても良く、例えば複数の爪状部材で固定されるように、部分的に固定されていない部分を有していても良い。
【0018】
[固定具]
本発明に用いる固定具は、上述したように、円弧状の固定面を有し、その固定面に伸縮性伝送路を把持させる。従って、固定面の長さはL/5以上必要である。
伸縮性伝送路の外周の50%以上を固定面と接しさせるに、180°以上の円弧からなる固定面を有する固定具を用いる方法は、180°以上の円弧からなる固定面を有する1つの固定具を用いてもよいし、複数の固定具を用いて180°以上の円弧からなる固定面を形成してもよい。
一つの固定具を用いる場合、固定面の円弧角度は180°以上が必要である。これ未満の場合、把持力が得られない。より好ましくは240°以上である。270°未満の円弧としておくと、開放部があり、伸縮性伝送路をとりはずししやすいという利点がある。
【0019】
次に複数の固定具を用いる場合について説明する。
一つの固定具は210°以下の円弧形状の固定面を有するものであり、他の固定具の固定面は直線形状でも、円弧形状でもよい。円弧形状の固定面を有する場合は210°未満の円弧であることが好ましい。210°以上の円弧同志で挟み込むと、エッジ部に応力が集中することがあり好ましくない。より好ましくは180°以下である。この場合は、各々の円弧の角度は同じであっても別々であってもよい。
いずれの場合も、伸縮性伝送路の固定部が本発明でいう断面積となるようにして固定することが必要である。
【0020】
次に2つの固定具で挟み込む場合についてより具体的に説明する。
2つの固定具で挟み込む場合は、各々がセパレートしていても、片側が接続されていてもよい。各々がセパレートされているものは、ネジや、あらかじめ定められた凹凸部へのかみ合わせなどで、2つの固定具で挟み込むことができる。2つの固定具の距離は、厚みゲージで測定するか、あらかじめ目印をつけておくか、あるいは、スペーサを介在させることにより決めることができる。片側が接続されているものにおいては開放されている側を上記と同様に固定し、本発明の断面積を得ることができる。同様にして、3つ以上の固定具で挟み込んでもよい。
【0021】
本発明の固定具の伸縮性伝送路と接する固定面の硬度は、ゴム硬度で30°以上100°以下が好ましい。さらに好ましくは50°〜95°、特に好ましくは70°〜90°である。30°未満の場合は伸縮による伸縮性伝送路の断面積が変化するとずれることがある。100°を越えると固定具の端と伸縮伝送路が局部的に接触する部分に応力集中し、断線しやすくなる。弾性樹脂を用いて固定具を作ること、または金属やプラスチック製の固定具の固定面表面に弾性樹脂層を設けることにより上記硬度を得ることができる。
また、伸縮性伝送路をあらかじめ上記硬度を有する弾性樹脂チューブで被覆しておき、伸縮性伝送路と固定具との間に当該弾性樹脂チューブを介在させて固定してもよい。
あらかじめ弾性樹脂チューブで被覆した伸縮性伝送路は、チューブ内径が伸縮性伝送路の伸長限界時直径以上のチューブへあらかじめ伸縮性伝送路を挿入しておくことにより得ることができる。被覆するチューブとして伸縮伝送路の弛緩時直径相当の熱収縮チューブを用いると、伸縮性伝送路を挿入しやすいという利点があり、さらに、固定部へチューブを移動しやすく、固定部にて熱収縮させることにより、本発明の固定部の断面積とすることができるため、特に好ましい。
【0022】
本発明の固定具の円弧状の固定面の曲率半径Drは、0.5(Lm/2)<Dr<100(L/2)の範囲であることが好ましい。ここで、L(mm)は伸縮伝送路の弛緩時の外径であり、Lm(mm)は最大伸長時の外径である。曲率半径Drが100×L/2以上の場合、伸縮性伝送路と円弧状の固定面との接触が、点接触に近づき、把持力が得られなくなるか、または、伸縮性伝送路が大きく変形せざるを得なくなる。より好ましくは50×L/2以下である。さらに好ましくは10×L/2以下である。曲率半径Drが0.5×Lm/2以下の場合は伸縮性伝送路を固定面に沿わせることが困難となりむしろ断線しやすくなることがある。より好ましくは0.6×Lm/2以上であり、特に好ましくは0.7×Lm/2以上である。
このような範囲の曲率を持った円弧状固定面とすることで、伸縮性伝送路が最大伸張されても周方向の5割以上を固定具と接するようにしやすく、しっかり把持でき、かつ、伸張及び屈曲時に局部的な応力集中を防ぐことができ、断線しにくい固定構造とすることができる。
【0023】
本発明の固定具の固定面の長さ方向の端部の形状は丸みを帯びた形状(図9参照)であることが好ましい。より具体的には、伸縮性伝送路の最大伸長時の外径をLm(mm)とした場合に、固定面と直交する断面の端部が、曲率半径TrがLm/100以上であり、角度範囲が10°〜180°である円弧であることが好ましい。曲率半径はさらに好ましくはLm/10以上であり、特に好ましくはLm以上である。角度範囲は、より好ましくは30°〜180°、さらに好ましくは60°〜180°である。これは、固定具の端では、伸縮性伝送路は多様な方向へ伸長されることがあり、固定具の端での接触が伸縮性伝送路の表面を傷つけるためである。
【0024】
[伸縮性伝送路の端接続部]
本発明でいう伸縮性伝送路の端接続部とは、伸縮性伝送路の中にある伝送体の端を他の機器または部品へ接続する部分を言う。伝送体として銅線を使用した伸縮性電力伝送路を例に取ると、伝送体である銅線の端は圧着端子に圧着されるか、コネクターの部品であるコンタクトへ圧着またはハンダ付けされるか、電子機器の基板などにハンダ付けされる。この端子へ圧着された部分、コンタクトへ圧着した部分、または基板などへハンダ付けした部分が、伸縮性伝送路の端接続部となる。
この接続部は外力により断線しやすいため、外力が接続部に及ばないようにすることが、本発明の固定構造を備えた機器の寿命を長くするために重要である。伸縮性伝送路の端接続部から0mm〜500mmの間に本発明の固定構造を備えることにより、機器の断線寿命を長くすることができる。
【0025】
[機器]
本発明で言う伸縮性伝送路が装着されている機器とは、例えば心電計、脈拍計および血圧計などのバイタルデータモニタリング装置、アシストスーツ、モーションキャプチャー、ウエアラブルコンピュータ、義肢、義足、ブレインマスター、イヤホンコードおよびアイグラスなどの身体装着型電子機器、産業ロボット、フューマノイドロボットおよびホビーロボットなど動作機構を有するロボット、内視鏡および超音波診断計などケーブルでつながったセンサやカメラ、並びにモバイル機器周辺のACアダプターおよびマウスなどを挙げることができるが、これらに限定されるものではない。
いずれの場合も、伸縮性伝送路の少なくとも1箇所が電子機器または電気デバイスまたは光受発信機器などに接続されており、他端が装置、機器および衣服などに固定され伸長されるものであったり、または他端を例えば手で引っ張るなどして外部からの力で伸長されるものをいう。
【0026】
本発明の固定構造は、1%以上伸縮または5°以上屈曲する部位に伸縮性伝送路が装着された機器に特に有効である。本発明の機器は、本発明の固定構造を有することにより、接続部の接続不良を減らすことができる。
伸縮性がほとんどない通常の伝送路を使用すると、伝送路を1%以上伸長すると、コネクターやハンダ接続部がはずれ、接続部の接続不良が発生する。伸縮性伝送路を用いることにより、接続部の不良を減らすことができるが、本発明の固定構造を有することで、接続部の不良をさらに減らすことができる。
【0027】
[ガイド]
伸縮性伝送路の両末端を前述の固定構造とする場合、その中間部において、伸縮性伝送路と機器との位置を規制するためのガイドを有することが好ましい。ガイドは、当該中間部を構成する部品に溝や穴として存在してもよく、別途ガイドを当該部品に取り付けてもよい。本発明におけるガイドは、弛緩時外径がL(mm)の伸縮性伝送路を沿わせるガイドであり、そのガイドは、曲率半径が0.8L以上20L未満のガイドが好ましい。0.8L未満とすると、弛緩時にガイドからはみ出し、ガイドはずれを起こす。より好ましくは1L以上であり、さらに好ましくは1.2L以上である。曲率半径が20L以上になるとガイドが大きくなりすぎ実用上好ましくない。好ましくは10L以下である。さらに好ましくは5L以下である。円弧角度は30°以上が好ましい。これ未満の場合は、ガイドからはずれやすくなる。より好ましくは60°以上、さらに好ましくは90°以上。特に好ましくは180°以上である。
あらかじめ2つの部品に分かれているものを、伸縮性伝送路を挟み込む形で合体させてガイドとすることもできる。また、リング状のガイドは、伸縮性伝送路にあらかじめ装着しておき、そのガイドを機器の所定の位置に固定してもよい。本発明のガイドは、伸縮性伝送路がすべりやすい表面状態であることが好ましい。
材質は、特に限定されないが、硬度はゴム硬度90°以上であることが好ましい。これ以下の場合は、摩擦が強くなりすぎすべりが阻害される。より好ましくはビッカース硬さ10Hv以上、さらに好ましくはビッカース硬さ20Hv以上である。表面粗度は算術平均粗さで0.01μ〜100μの範囲が好ましい。0.01μ以下の場合は、摩擦が強くなり、100μ以上の場合は凹凸が激しく、伸縮性伝送路の表面及び導体を劣化させることがある。より好ましくは0.1μ〜10μである。金属材料の場合は、所謂梨地加工が好ましい。セラミック材料の場合は、内部に形成する粒子形によってコントロールすることができる。
装着された機器において伸縮性伝送路が曲げられる部分がある場合は、その曲げの頂点になる部分にガイドがあることが好ましい。
このようにすることで、伸縮してもガイドのはずれることが無く、屈曲部などの伸縮性伝送路を所定の位置を沿わせて配線することができる。
【0028】
すなわち、本発明は、従来の伸縮性のないケーブルでは余長が必要な屈曲や伸張を伴う部位に、本発明の固定構造を有するように、また必要に応じてガイドを用いて伸縮性伝送路を装着することにより、機器に必要なケーブル予長分のスペースを無くし、かつ、伸縮性伝送路の断線トラブルを無くすことができる画期的な技術である。
【実施例】
【0029】
以下実施例に基づきさらに詳細に説明するが、本発明はこれらの実施例のみに限定されるものではない。なお、本発明で用いた評価方法は次の通りである。
(1)伸縮性伝送路の伸張回復率
長さ100mmの試料をテンシロン測定機に図7に示すようにセットして、引張り速度100mm/minで引張り、所定伸張後リターンし、応力がゼロになる距離(Amm)を求め次式により回復率を求めた。
回復率(%)=((100−A)/100)×100
(2)伸縮性伝送路の外径
ノギスにより任意に5箇所を測定しその平均値を外径とした。
(3)固定具固定面の表面硬度
JIS−K−6253に基づいてデユロメータを用いて測定した。
【0030】
(4)把持性
測定部試料長100mmで伸縮性伝送路を固定具に固定し、テンシロン測定機に図7に示すようにセットして、引張り速度10mm/minで最大伸長率まで引張り、この間に固定部のずれが発生するか否かで判定した。
○ 固定部がずれない。
× 固定部がずれる。
【0031】
(5)屈曲寿命
図8に示すように、伸縮性伝送路を固定具に固定してデマッチャー試験機にセットし、固定具出口で90°に曲げ、固定具出口より20cm下で、下部を把持し、下記条件で繰り返し伸長試験を実施した。
曲げ角度:90°
伸縮範囲:10%−a%
伸縮速度:100回/min
装置名 :デマッチャー試験機(大栄科学精機製)
測定器 :(株)住井酸素工業所製 5連式連続電気抵抗測定装置
断線判定:電気抵抗値が20%以上大きくなった点を断線と判定した。
断線までの伸縮回数から、以下の基準で屈曲寿命を判定した。
× 10万回未満
○ 10万回以上50万回未満
◎ 50万回以上
【0032】
[実施例1]
940dtexのポリウレタン弾性長繊維(旭化成せんい(株)製、商品名:ロイカ)を芯にして、伸張倍率を4.2倍下で、220dtexのウーリーナイロン(黒染め糸)を700T/Mの下撚りおよび500T/Mの上撚りで捲回し、ダブルカバー糸を得た。得られたダブルカバー糸を製紐用ボビンに巻き取り、当該ボビン4本を、8本打ち製紐機((有)桜井鉄工製)のS方向に2本、Z方向に2本、均等に配置し組み紐を作成し直径1.8mmの弾性円筒体を得た。当該弾性円筒体を、独自に開発した設備(特殊製紐機:(1)芯部を複数のV溝にクロスして沿わせ(所謂8の字掛け)把持し所定の速度でフィードする機構。(2)該芯部を複数のV溝にクロスして沿わせ把持し、一定速度で巻き上げる機構。(3)芯部を伸長した状態で、導体線を並列に巻き付ける機構 (4)上記の(1)および(2)に加え芯部を伸長した状態で、導体線の捲回方向と逆方向に導体線の内周と外周を通って他の糸状体を捲回する機構(導体線を巻いたボビンと他の糸状体を巻いたボビンが、前後に移動し、相互に逆方向に旋回する)を有する設備)により、2.2倍伸長しながら、所定の導体線(2USTC(有)竜野電線製)4本をZ方向に並列に捲回し、S方向にエステル(56dtex(12f))を4本導体線の内側と外側を通して捲回し、導体線捲回品を得た。当該導体線捲回品を1.8倍伸長下で、16本打ち製紐機にてエステルウーリー(330dtex2本合わせ)により外部被覆を行ない、直径3.8mmの伸縮性伝送路を得た。この伸縮性伝送路の伸長回復率が50%未満となる最大の伸長率は90%であった。また、この伸縮性伝送路を持いる機器として、機器上での最大伸長率が50%となる場合を想定して把持性及び屈曲寿命を以下の手順で調べた。
この伸縮性伝送路を、図3に示すように、固定面断面が曲率半径1.5mm、角度範囲180°の円弧である2つのステンレス製固定具で挟み、テンシロン測定機にて把持性を調べた。また、この固定具で挟んだ伸縮性伝送路をデマッチャー試験機(図8参照)にて繰り返し伸縮を行い、屈曲寿命を判定した。結果を伸縮性伝送路および固定具の諸特性と共に表1に示す。
【0033】
[実施例2〜7、比較例1]
固定具の素材や形状を変化させたことを除いて実施例1と同様に実施した。結果を伸縮性伝送路および固定具の諸特性と共に表1に併せて示す。
なお、実施例2では、内径4mm、長さ6mmの熱収縮チューブ(収縮後肉厚0.25mm)(レイケムVERSAFIT V2)を伸縮性伝送路の固定位置にドライヤーで熱をかけ熱収縮させたものを表1記載のステンレス製固定具で挟んで本発明の固定構造とした。また、実施例5では、内径4mm、長さ6mmの接着剤付熱収縮チューブ(収縮後肉厚0.7mm)を、伸縮性伝送路の固定位置にドライヤーで熱をかけ固定し、固定面断面が曲率半径2.1mm、角度範囲180°の円弧であり、端部形状が曲率半径2mmの円弧である2つのステンレス製固定具に挟み本発明の固定構造とした。
【0034】
[比較例2]
実施例1で得られた伸縮性伝送路を2枚のステンレス製平板の間に間隔2mmとなるように把持して、テンシロン測定機による把持性判定と、デマッチャー試験機による屈曲寿命判定を行なった。結果を表1に示す。
以上の結果から本発明の固定構造は、従来技術ではなし得なかった、長寿命を実現するきわめて重要な技術であることがわかる。
【0035】
[実施例8]
図10に示すように、最大曲げ角度が90°の100mm角のアームを有するアクチュエータのアーム外層に、実施例1の伸縮性伝送路を沿わせ、アームを伸張した状態で、アーム屈曲部から両側へ各20cmの位置で実施例2の方法で固定した。このとき伸縮性伝送路は10%伸張した状態で固定されている。動作側のアームにおける伸縮性伝送路の端接続部を固定部端から20mm先のWEBカメラ(ELECOM社製 UCAM−DLP130TSV))と接続し、固定側のアームにおける伸縮性伝送路の端接続部を固定部端から500mm先のパーソナルコンピュータと接続して、アーム作動を確認した。
この結果、作動により、カメラ映像が途絶えることがなく、固定部で伸縮性伝送路がずれることが無く、取り付けたデバイスに不具合が発生せず、かつ、アーム部の外側に配線が飛び出すことも無い、画期的な機器を得ることができた。
【0036】
参考までに、一般ロボットケーブル(スリムロボットケーブル KRT(共和電線産業(株)社製)を同様のアームとカメラとパーソナルコンピュータを備えた機器へ、アームを90°曲げた状態(最大伸張状態)で、たるみが無い様に取りつけ、このアームの屈伸を行なったところ、アーム伸張時には、アームから最大で5cm近くのところまでケーブルが飛び出すことが確認された。このことから、従来技術では、このケーブル余長処理のスペースが必要となり、アーム構造が大きくならざるを得ないことがわかる。
【0037】
[実施例9]
図11に示すように、回転角度30°、曲げ角度60°の2方向に動作するアームの屈曲部へ、内径15mmのセラミックガイド N507014(湯浅糸道工業株式会社製)を取り付け、このガイドへ実施例1の伸縮性伝送路を通し、実施例7と同様にアーム屈曲部から両側へ各20cmの位置で実施例2の方法で固定した。この装置を繰り返し100回動作させた。伸縮性伝送路は最後まで、初期の配線位置からずれず、飛び出さず、きわめて安定な動作をした。
なお、同様の装置に一般ロボットケーブルを最大距離にて配線して動作を試みたところ、ケーブルがたるんだときにケーブルがガイドにひっかかったり、伸張時にケーブルがつっぱってケーブルが固定部からはずれるというトラブルが発生し正常に動作することができなかった。
【0038】
【表1】
【産業上の利用可能性】
【0039】
本発明の伸縮性伝送線の固定構造を備えた機器は、伸縮性伝送路が初期の配線位置からずれず、飛び出さず、きわめて安定な動作をし、特に、複雑な動きをする多関節ロボットや身体装着機器として最適である。
【符号の説明】
【0040】
1 伸縮性伝送路
2 固定具
3 固定面
【特許請求の範囲】
【請求項1】
伸縮性伝送路が固定具により固定された機器において、該固定具は断面が円弧状の固定面を有し、該伸縮性伝送路は該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し(但し、L(mm)は該伸縮性伝送路の弛緩時の外径である)、該伸縮性伝送路の固定部の見掛け断面積(S(mm2))が下式で表される範囲内になっていることを特徴とする機器。
S1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)
(但し、S1(mm2)は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。)
【請求項2】
固定具の固定面のゴム硬度が30°以上100°以下である請求項1に記載の機器。
【請求項3】
伸縮性伝送路の最大伸張時の外径がLm(mm)である時に、固定具の固定面の曲率半径Drが下記式を満足する請求項1または2に記載の機器。
0.5×(Lm/2)<Dr<100×(L/2)
【請求項4】
固定具の固定面と直交する断面の端部が円弧状である請求項1〜3のいずれか一項に記載の機器。
【請求項5】
伸縮性伝送路の少なくとも固定部が弾性チューブで被覆されている請求項1〜4のいずれか一項に記載の機器。
【請求項6】
伸縮性伝送路の端接続部から0mm〜500mmの間で固定されている請求項1〜5のいずれか一項に記載の機器。
【請求項7】
伸縮性伝送路が1%以上伸長する機構および/または5°以上曲がる動作をする機構を少なくとも1箇所有する請求項1〜6のいずれか一項に記載の機器。
【請求項8】
伸縮性伝送路の両端が固定されており、中間の少なくとも1箇所に、曲率半径が0.8L以上、円弧角度が30°以上の曲面を備えたガイドを有する請求項1〜7のいずれか一項に記載の機器。
【請求項1】
伸縮性伝送路が固定具により固定された機器において、該固定具は断面が円弧状の固定面を有し、該伸縮性伝送路は該固定面と周方向において50%以上、長さ方向においてL/5(mm)以上接し(但し、L(mm)は該伸縮性伝送路の弛緩時の外径である)、該伸縮性伝送路の固定部の見掛け断面積(S(mm2))が下式で表される範囲内になっていることを特徴とする機器。
S1×(1/√((100+a)/100)≧S≧0.5×S1×(1/√((100+a)/100)
(但し、S1(mm2)は弛緩時の伸縮伝送路断面積であり、a(%)は伸縮性伝送路の最大伸長率である。)
【請求項2】
固定具の固定面のゴム硬度が30°以上100°以下である請求項1に記載の機器。
【請求項3】
伸縮性伝送路の最大伸張時の外径がLm(mm)である時に、固定具の固定面の曲率半径Drが下記式を満足する請求項1または2に記載の機器。
0.5×(Lm/2)<Dr<100×(L/2)
【請求項4】
固定具の固定面と直交する断面の端部が円弧状である請求項1〜3のいずれか一項に記載の機器。
【請求項5】
伸縮性伝送路の少なくとも固定部が弾性チューブで被覆されている請求項1〜4のいずれか一項に記載の機器。
【請求項6】
伸縮性伝送路の端接続部から0mm〜500mmの間で固定されている請求項1〜5のいずれか一項に記載の機器。
【請求項7】
伸縮性伝送路が1%以上伸長する機構および/または5°以上曲がる動作をする機構を少なくとも1箇所有する請求項1〜6のいずれか一項に記載の機器。
【請求項8】
伸縮性伝送路の両端が固定されており、中間の少なくとも1箇所に、曲率半径が0.8L以上、円弧角度が30°以上の曲面を備えたガイドを有する請求項1〜7のいずれか一項に記載の機器。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−195987(P2012−195987A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−55941(P2011−55941)
【出願日】平成23年3月14日(2011.3.14)
【出願人】(303046303)旭化成せんい株式会社 (548)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月14日(2011.3.14)
【出願人】(303046303)旭化成せんい株式会社 (548)
【Fターム(参考)】
[ Back to top ]