
位相と振幅の相関関係を使用したモード5検出処理
【課題】受信レーダ信号の位相と振幅との相関関係を有する改良されたモード5の航空管制システムを提供する。
【解決手段】モード5の航空管制システム20の受信機22は、振幅と位相信号出力を提供し、航空機から送信されるデータからのプレアンブルとフライト情報を含むデジタルデータストリームを提供する。信号スプリッタ24は、振幅と位相信号出力を、奇数番号のパルスと偶数番号のパルスを送信するそれぞれ奇数チャンネル26と、偶数チャンネル28の間で分割する。プレアンブル相関器38は、奇数と偶数データストリームと規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出して、プレアンブル決定論理回路48は、プレアンブル相関器38から出力された信号を処理して、どのプレアンブルが実際に有効であるのか識別する。
【解決手段】モード5の航空管制システム20の受信機22は、振幅と位相信号出力を提供し、航空機から送信されるデータからのプレアンブルとフライト情報を含むデジタルデータストリームを提供する。信号スプリッタ24は、振幅と位相信号出力を、奇数番号のパルスと偶数番号のパルスを送信するそれぞれ奇数チャンネル26と、偶数チャンネル28の間で分割する。プレアンブル相関器38は、奇数と偶数データストリームと規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出して、プレアンブル決定論理回路48は、プレアンブル相関器38から出力された信号を処理して、どのプレアンブルが実際に有効であるのか識別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は一般的に、航空機のような対象物の位置を識別し判定するための二次監視レーダを使用する技術に関する。
【背景技術】
【0002】
二次監視レーダ(SSR:Secondary Surveillance Rader)は、航空管制(ATC:Air Traffic Control)において使用されるレーダシステムである。SSRは、航空機の位置を検出し測定するだけでなく、その航空機の識別や高度などの航空機からの付加的情報を要求する。一次レーダシステムは、ちょうど光ビームの中の対象物を見ることと同じような現象であるが、反射されたレーダ信号を検出することによって、対象物の範囲や方位のみを測定する。これに対してSSRは、符号化されたデータを含む応答を送信することによって、各々の呼掛信号に応答するレーダトランスポンダを搭載した対象物に対して返答する。SSRは、もともと第二次世界大戦中に開発された軍事的な敵味方識別(IFF:Identification Friend or Foe)技術に基づいており、この2つのシステムは今日でも依然、両立している。システムは進化して、「敵味方識別」(IFF)という言葉は、通常、民間と外国の航空機の使用を含めたSSR運用のすべてのモードについて言及するようになっている。
【0003】
SSRアンテナは、呼掛コールを送信し、航空機データを受信するために使用される。軍用、民間航空機は、二次監視レーダの呼掛からの信号に対して、識別コードと高度を基に自動的に応答するトランスポンダを有している。そのコードは、所定の呼掛信号に応答する所定のメッセージである。航空機が飛行を始める前に、その航空機は、航空管制官からトランスポンダコードを受け取る。通常、たった1つのコードが、全飛行に対して与えられる。これらのコードは、モードコードと呼ばれる場合がある。対象物までの範囲は、呼掛時間と応答時間の間の時間的な遅れから計算される。それ故に、SSRシステムは、友好的な航空機に、一次レーダが可能が提供出来るすべてのデータ、それ以上のデータを提供する。
【0004】
航空機搭載のトランスポンダは、全方位アンテナを有しており、あらゆる方向からのレーダ信号を受信、応答することが可能である。トランスポンダは、送信機からの信号を受信して、そのトランスポンダが設定されているモードで受信している呼掛信号に対してだけ、特定のパルスグループ(コード)で選択的に応答する。これらの返答は、対象物の「外板(skin)」での返送によって受信される一次レーダの返送信号とは独立している。SSR呼掛け器によって処理された表示のための返答は、「プロット」と呼ばれることがある。航空管制官が使用するレーダスコープは、一次レーダシステムと二次レーダシステムの両方からの返送を表示する。これらの返送は、航空管制の制御と切り離しにおいて管制官が参照にするものである。
【0005】
SSRで使用されるトランスポンダは、1つの周波数(1030MHz)で受信し、別の周波数(1090MHz)で送信する無線受信機と送信機である。このタイプのトランスポンダは、クロスバンドビーコンと呼ばれる。対象物の航空機のトランスポンダは、要求された情報を含む符号化応答信号を送信することによって、呼掛け器(通常は、しかし、必ずしも必要条件ではないが、一次レーダと共同設置された地上ステーション)からの信号に対して応答する。SSRは、アンテナが回転する間に、呼掛パルスを連続して送信するか、電子的に空間が走査される。送信された返答は、呼掛モードに依存している。その時、航空機は、計算された方位と範囲の、管制官のレーダスクリーンに、名称付きアイコンとして表示される。運用中のトランスポンダを有しない航空機は依然、一次レーダで観測され、SSR派生データの恩恵を受けない管制官に表示される。
【0006】
民生用SSRと軍事用IFFは両方とも、戦時中のそれらよりもはるかに複雑になってきているが、依然、両立している。この両立性の1つの理由は、軍用航空機の、民生用空域での運用を可能にすることである。現在、SSRははるかに詳細な情報を提供出来、衝突を避けるために、航空機間で直接、データ交換を可能にしている。味方を確実に認識するという第一の軍事的役割を考えるなら、IFFは、敵による「なりすまし(spoofing)」を防止するためのはるかに確実な(暗号化された)メッセージを有しており、空、海、及び地上車両を含むあらゆる種類の軍事的基盤で使用される。
【0007】
いくつかのトランスポンダモードがあるが、その各々は異なる情報を提供する。モード1は、2桁5ビットの任務コード(軍用に限る−コクピットで選択可能)を提供する。モード2は、4桁8進数の単位コード(軍用に限る−地上で設定するか、特定の航空機のタイプによって飛行中に変更される)。モード3/Aは、航空管制官(軍用及び民間)によって割り当てられるトランスポンダコードとして知られる、航空機のための4桁8進数識別コードである。モード4は、符号化された課題に対する3パルスの応答(軍用に限る)を提供する。モードB及びDは、もともと規定されているが、民間ATC目的のために使用されない。
【0008】
民間航空機の場合、運行モードは、A、C及びSである。モードSは、モードコードに加えて、他のデータの送信を含む軍用、民間航空管制のための比較的新しいIFF手順である。Aモードは、航空管制官によって割り当てられた0から7の数字を使用しており、識別とモニタリングを可能にするためにパイロットによって設定される4桁のコードに基づく。モードCは、航空機高度計によって自動的に読み取られる気圧高度を送信する。モードSは、モードSの呼掛によって動作して、呼掛信号によって要求される特定な情報を提供することが出来る。モードA及びCに関しては、呼掛信号を受信した航空機はすべて応答するが、モードSの場合は、航空機に対して個別に呼掛ることが出来る。現代のATCシステムでは、データは、レーダスクリーン上の航空機位置のシンボルに関連したタグやラベルの中の英数字で表わされる。
【0009】
モード5は、自動従属監視放送(ADS−B)とGPS位置(軍用に限る)の確実な送信を提供するために暗号化を提供する。モード5 IFFシステムは、他のモードが呼掛と応答に関する暗号化を可能にする以外の、呼掛け器とトランスポンダとの間のより洗練されたデータ交換を可能にする。送信シーケンスや応答シーケンスが長くなり、暗号技術が改良されれば、交信をモニタして暗号を破る可能性は非常に低くなる。
【0010】
トランスポンダのレベルは、重要な特徴である。そのレベルは、トランスポンダの能力を報告する。レベル1のトランスポンダは、基礎的監視能力を有するトランスポンダである。レベル1のトランスポンダは、データリンク能力や拡張メッセージの提供はない。レベル2のトランスポンダは、航空機衝突防止装置(ACAS)や、高度に関する地上ステーション要求や、機体認識のための地上ステーション要求に関する能力と共に、レベル1のトランスポンダの特徴をすべて有している。今日、設置されるほとんどのトランスポンダはレベル2の能力を有している。
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、受信レーダ信号の位相と振幅との相関関係を有する改良されたモード5の航空管制システムを提供する。
【課題を解決するための手段】
【0012】
航空機から発信されたプレアンブルとフライト情報を含むデジタルデータストリームを処理する本発明の航空管制システムは、航空機からのデジタルレーダ信号を受信するための受信機を具備する。受信機は、プレアンブルと位相信号出力を提供するように配置され、信号スプリッタは、奇数番号パルスの1組と、偶数番号パルスの1組とを送信するように配置された奇数チャンネルと、偶数チャンネルの間の受信機からの振幅と位相信号出力を分割するように配置されている。
【0013】
本発明は、更に、奇数チャンネルで符号化された信号を抽出して、奇数データストリームを形成するための信号スプリッタに接続された奇数チャンネルデータデコーダと、偶数チャンネルで符号化された信号からデータを抽出して、偶数データストリームを形成するための信号スプリッタに接続された偶数チャンネルデータデコーダとを備える。奇数と偶数データストリームと、規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出するための奇数と偶数チャンネルデコーダに接続されたプレアンブル相関器とを備え、プレアンブル決定論理回路は、プレアンブル相関器から出力された信号を処理して、妥当可能性あるプレアンブルのうちのどちらが実際に妥当であるか識別するために配置されている。
【0014】
本発明の航空管制システムは、信号スプリッタと、奇数チャンネルデータデコーダとの間の前記奇数チャンネルの中の奇数チャンネル差分位相検出器と、信号スプリッタと偶数チャンネルデータデコーダとの間の偶数チャンネルの中の偶数チャンネル差分位相検出器とを更に具備することが可能である。
【0015】
本発明の航空管制システムに含まれるプレアンブル相関器は、奇数チャンネル振幅を示す信号を受信するために信号スプリッタに接続された第1の入力と、復号された奇数信号を受信するために奇数チャンネルデータデコーダに接続された第2の入力とを有する奇数チャンネル振幅相関器であって、奇数振幅相関器合計信号を生成するように配置された奇数振幅相関器と、偶数チャンネル信号の位相を示す信号を受信するために偶数チャンネルデータデコーダに接続された偶数チャンネル位相相関器であって、偶数位相相関器合計信号を生成するように配置された偶数チャンネル相関器と、偶数チャンネル振幅を示す信号を受信するために、信号スプリッタに接続された第1の入力と、復号された偶数信号を受信するために、偶数チャンネルデータデコーダに接続された第2の入力とを有する偶数チャンネル振幅相関器であって、偶数振幅相関器合計信号を生成するために配置された偶数チャンネル振幅相関器と、偶数チャンネル信号の位相を示す信号を受信するために、偶数チャンネルデータデコーダに接続された偶数チャンネル位相相関器であって、偶数位相相関器合計信号を生成するために配置された偶数チャンネル位相相関器とを具備することが可能である。
【0016】
本発明の航空管制システムは、データストリーム中のサイドローブによって生成されたプレアンブルを抑制するため、及び単パルスレーダデータを生成するために、プレアンブル決定論理回路と、受信機に接続された応答経路サイドローブ抑制と、単パルスレーダ信号処理回路とを具備することが可能である。
【0017】
本発明の航空管制システムは、好ましくは、偶数と奇数チャンネルの中のデータを識別して、どちらのチャンネルが、更なる処理のために使用すべき最良のデータを有するのか判断するためのウォルシュデータ相関器システムを更に具備する。
【図面の簡単な説明】
【0018】
【図1】本発明のモード5検出システムのブロック図である。
【図2】図1のシステムに含まれる信号スプリッタのブロック図である。
【図3】図1に示されるように本発明に含むことが出来る差分位相検出器のブロック図である。
【図4】図1のシステムに含むことが出来るデータデコーダのブロック図である。
【図5】図1のシステムに含むことが出来る相関器チャンネルのブロック図である。
【図6】図1に示されるように本発明に含むことが出来るプリアンブル振幅圧縮システムのブロック図である。
【図7】図1のシステムに含むことが出来るプリアンブル決定論理回路システムのブロック図である。
【図8】図1のシステムに含むことが出来る応答サイドローブ抑制システムのブロック図である。
【図9】図1のシステムで使用可能な単パルス処理のブロック図である。
【図10】図1のシステムで使用可能なウォルシュデータ相関器とデータデコーダを示す。
【図11】図10のデータ相関器の部分のブロック図である。
【図12】図1のシステムで使用可能な消去、単一エラー検出、訂正プロセスのフロー図である。
【図13】図1のシステムに含むことが出来る外部受信機から出力される信号を図示している。
【図14】図5のプリアンブル位相相関器から出力される信号を図示している。
【図15】図6のプリアンブル圧縮システムから出力されて信号を図示している。
【図16】図1のシステムに含むことが可能な外部受信機から出力された信号を図示している。
【図17】プリアンブルトリガのマークを図示している。
【図18】図11のデータ相関器から出力された信号を図示している。
【図19】図11のウォルシュデータ相関器とデータデコーダにおけるデータ決定プロセスから派生したデータ決定信号を図示している。
【図20】様々なプリアンブル閾値のためのデータ相関器閾値の関数としての偽アラーム確率を図示している。
【図21】データ対ノイズ比の関数としての検出確率光検出器を図示している。
【発明を実施するための形態】
【0019】
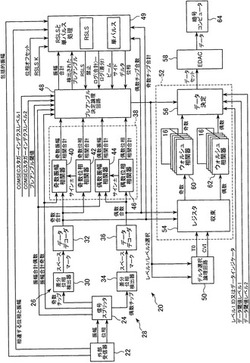
図1を参照すると、本発明のモード5検出システム20は、当技術分野では公知のレーダトランスポンダ(図示せず)からのレーダ信号を受信するように配置された外部受信機22を備える。典型的には、トランスポンダは、航空機(図示せず)に搭載されている。
【0020】
モード5検出システム20は、次のインターフェースを含む。
1.振幅SUM
受信機出力振幅SUM信号は、32MHzのサンプリングレートにおいて16ビットまでの直線データを含んでいる。
2.位相SUM
受信機出力位相SUMデータは、32MHzレートにおいて直線位相分布の8ビットを含んでいる。
3.振幅OMNI
受信機出力振幅OMNI信号は、32MHzサンプリングレートにおいて、16ビットまでの直線データを含んでいる。
4.振幅DIFF
受信機出力位相DIFFデータは、32MHzレートで16ビットまでの直線データを含んでいる。
5.位相DIFF
受信機出力位相SUMデータは、32MHzレートで、8ビットの直線位相分布を含んでいる。
【0021】
モード5検出システム20は、2つの閾値設定、つまり、内部データテスト偽アラームレートを調整するプレアンブル閾値と、レベル1とレベル2のための最終データ偽アラームレートを設定するレベル1とレベル2データ閾値を含んでいる。
閾値設定は、
1.プレアンブル閾値
プレアンブル閾値は、プレアンブルスタートのための閾値を設定するステップ2の8から16までの値。12(デフォルト設定)を設定する時、レベル1プレアンブル偽アラームレートは、約5000である。
2.データ閾値レベル1
データ閾値レベル1は、最終データの偽アラームレートを制御する。閾値設定レベル1の90と、プレアンブル閾値設定12の場合、データ偽アラーム確率は、毎秒約8×10−3または1.28偽アラームである。
3.データ閾値レベル2
データ閾値レベル2は、最終データ偽アラームレートを制御する。閾値設定レベル2の160と、プレアンブル閾値設定の12の場合、データ偽アラーム確率は、毎秒約4×10−8または0.6偽アラームである。
【0022】
モード5検出システム20は次の制御を含む。
1.位相オフセット
これは、システムによって0あるいは180度に集中していると報告されたデルタ位相をオフセットするシステムから報告された位相訂正信号である。
2.交信セキュリティ(COMSEC:Communications Security)スタガー(stagger)インデックスレベル1
このインデックスは、呼掛毎に設定されるプレアンブルスタガーインデックス1によって決定され、レベル1スタガーテーブル150から、レベル1プレアンブルスタガーを選択するときに使用する。この呼掛時間に検出されたすべての合法的対象物は、このスタガーを使用して、システムが他の呼掛け器からのトランスポンダ報告を拒否することを可能にする。
3.COMSECスタガーインデックスレベル2
このインデックスは、システムによってコード検証インターバル(CVI)毎に設定される、プレアンブルスタガーインデックスレベル2によって決定される。CVI時間中に検出されたすべての対象物は、P3、P2及びP1パルスのためのこのスタガー時間を使用する。CVI時間は、呼掛け器とトランスポンダによって、独立して変更されるので、検出器は、プレアンブル検出のために、過去及び未来のCVIを評価しなければならない。従って、現在、過去、未来のインデックスは記憶されなければならない。
4.COMSEC拡散インデックスレベル1
このインデックスは、呼掛時間毎に設定される拡散機能インデックスによって決定され、この呼掛中に受信したすべてのレベル1レポートのためのユニークなデータ拡散を提供する。拡散機能は、検出器に記憶された256の拡散機能のテーブルから抽出される。
5.COMSEC拡散インデックスレベル2
このインデックスは、CVI時間毎に設定される拡散機能インデックスによって決定され、このCVI中に受信されたすべてのレベル2のレポートのためのユニークなデータ拡散を提供する。拡散機能は、検出器に記憶された256の拡散機能のテーブルから抽出される。しかし、CVIは、トランスポンダと呼掛け器において独立して変更されるので、返答が、以前の、あるいは次のCVIを使用するということが起こり得る。すべての可能なCVIを検索するプレアンブル検出は、正しいインデックスを選択して、どのCVIを現在の対象物のために使用するべきか識別する。従って、現在、過去、未来のインデックスは、いつでも使用出来るように記憶されていなければならない。
6.レベル1データあるいはID
これは、どのタイプのレベル1の応答を期待されているか、つまりデータなのかIDなのかを検出器に教えるインジケータである。
7.RSLSK
メインビーム又はサイドローブから派生したと報告されるべき対象物のための応答経路サイドローブ抑制(RSLS:Reply path side lobe suppression)の閾値設定である。
【0023】
モード5検出システム20は、次のデータを提供する。
1.オーバレイコード
オーバレイコードは、レベル1呼掛時間毎に受信され、データを暗号化したり復号化するために使用される暗号化コンピュータ(図示せず)から受信された時、レベル1の9ビットデータシンボルを解読するために使用される。
2.暗号化コンピュータに対するデータ
エラー検出及び訂正(EDAC:Error Detection And Correction)に続くレベルとレベル2データは、データスクランブル解析のためにCRYPTOに報告される。復号化されたデータは暗号コンピュータから受信される。
3.レポートは、方位角とフラッグを含むモード5データを有するモード5メッセージレポートである。
【0024】
受信機22は、レーダ信号の位相と振幅を示す32MHzベースバンドデータを信号スプリッタ24に入力する。図13は、外部受信機から出力された典型的な信号を図示している。信号はプレアンブルとして知られている第一部分と、データセットを含む第二部分を有している。信号スプリッタ24は、32MHzサンプルデータを、それぞれ「奇数」と「偶数」と指定された2つの16MHzデータセットに分割して、そのデータは、別々のチャンネル26、28で処理される。
【0025】
信号位相遷移に対する32MHzサンプルのランダム位置によって、各々の検出シークエンス(プリアンブルとデータセットの検出)中に、チャンネル26又は28が、他のチャンネルよりもより良い検出可能性を提供することが出来る。これは位相遷移中に最も注目すべきことである。位相変化に対して開始サンプリングポイントによっては、分割処理チャンネル26または28の出力の1つは、その他のチャンネルが最大位相変化を持つ時、ある位相遷移において、まったく位相変化を報告しない可能性がある。どのチャンネルが、各々のデータセットのために使用される最良のチャンネルであるのか識別するために、システム20は、各々のセットのためのデータ相関スコアを決定するために奇数と偶数サンプルを処理する。チャンネル26と28の両方の相関プロセスを応用することによって、信号入力のための最良のチャンネルが、検出プロセスのために選択される。最良のチャンネルの最終選択は、最高のデータ相関スコアが使用出来るプロセスの終わりまで延期される。
【0026】
奇数チャンネル26は、信号スプリッタ24からのデータを受ける差分位相検出器30を含んでいる。差分位相検出器30から出力された信号は、データデコーダ32に入力される。チャンネル28は、信号スプリッタ24からのデータを受ける差分位相検出器34を含んでいる。差分位相検出器34から出力される信号は、データデコーダ36に入力される。差分位相検出器34とデータデコーダ36は、好ましくは、それぞれ、差分位相検出器30とデータデコーダ32と同一に形成される。
【0027】
差分位相検出器30、34は、チャンネル当たり16MHzで、偶数と奇数サンプルデータを処理して、そのデータの中のマークとスペース値を検出する。理想的には、連続チップの間の位相差は、±90°であると期待される。しかし、ノイズと内部シンボル干渉(ISI:Inter Symbol Interface)によって、期待される実際の位相差は、最大90度以下の任意のΔθである。位相差がプラスの場合には、スペース(1)が宣言される。マイナス方位角の値が、マーク(0)として報告される。
【0028】
位相検出器30、34の出力は、符号化されたトランスポンダデータセットを抽出するために、差分データデコーダ32、36によって処理される。それは、各々新しいチップサンプルkは、新たなチップサンプルと過去の出力チップの排他的OR(XOR)である遅延を使用して実行される。このプロセスは、オリジナルコードまたはそのオリジナルコードの逆数を生成する(任意の「1」または「0」である第一ビットの値によって決まる)。
【0029】
データデコーダ32、36から出力された信号が、プレアンブル相関器38に入力される。プレアンブル相関器38は、奇数振幅相関器40と、奇数位相相関器42を含んでいる。プレアンブル相関器38はまた、偶数振幅相関器44と、偶数位相相関器46を含んでいる。データデコーダ32から出力された信号は、奇数振幅相関器40と、奇数位相相関器42に入力される。奇数振幅相関器40は、信号スプリッタ24からの振幅SUM奇数信号を受信する。データデコーダ36から出力された信号は、偶数振幅相関器44と、偶数位相相関器46に入力される。偶数振幅相関器44もまた、信号スプリッタ24からの振幅SUM偶数信号を受信する。プレアンブル相関器38は、受信データを処理して、マイナスまたはプラスであるレベル1とレベル2のプレアンブルパルスを検出する。データデコーダ32、36は、コードまたはそのコードの逆数を生成するので、相関関係の絶対値が、規定閾値を超える時に、成功した相関関係が宣言される。
【0030】
奇数振幅相関器40、奇数位相相関器42、偶数振幅相関器44及び偶数位相相関器46から出力された信号は、プレアンブル決定論理回路48に入力する。プレアンブル決定論理回路48も、プレアンブル閾値信号と、レベル1、2のためのプレアンブルスタガー時間を示す信号を受信する。プレアンブル相関器38の出力は、適切なプレアンブル検出のためのプレアンブル相関器出力を評価するプレアンブル決定論理回路48によって処理される。そのために、レベル1とレベル2のための現在プレアンブル時間スタガーは、現在の期待されるスタガー位置を識別する。スタガー値は、レベル1とレベル2のスタガー時間値のためのすべてのプレアンブルデータを記憶するローカルテーブルから抽出する。プレアンブル相関レベルが設定閾値以上の時、プレアンブル空間が、期待されたスタガー時間に合致する場合、プレアンブルセットを検出する。そのセットが2つのプレアンブル検出のレベル1の要件と合致するか、レベル2のスペース要件に合致する4つのプレアンブルのうちの少なくとも3つが検出された場合、データセットスタートT0が宣言される。レベル2のスタガー時間が、コード検証インターバル(CVI:Code Validation Interval)毎に変化するので、現在CVI、過去CVI及び次に期待されるCVIのために、レベル2のスタガーテストが行われる。レベル2プレアンブルテストの結果は、トランスポンダによってどのCVIが現在、使われているのか識別する(レベル1のプレアンブルスタガーは、呼掛毎に、呼掛け器によって開始されるので、よく知られている)。
【0031】
プレアンブル相関器38は、入力データストリームと、所定のプレアンブルマスクとの相関を取り、可能性のあるプレアンブルを検出する。奇数と偶数チャンネルに関して独立して処理が行われて、これらのチャンネルのいずれかでプレアンブルを検出された場合、成功を宣言する。相関機能は2つの処理を含み、位相のみの相関関係と、位相振幅の相関関係であり、その2つは統合されてプレアンブル決定出力を生成する。
【0032】
位相のみの相関器42、46は、差分位相検出器データに関する相関を行い、安定した波長独立定数の偽アラームレート(CFAR:Constant False Alarm Rate)を提供する。それは、システムが、データ検出プロセスを起動するために使用可能な信頼性のあるプレアンブルトリガを生成することを可能にする。位相相関器42、46によって達成されたCFARプロセスは、振幅リミッタがCFARプロセスにおいて実施されるかのように、あらゆるノイズレベルで、一定の偽アラームレートを保持する。しかし、位相のみの相関プロセスは、RSLSとレベル1の単パルスプロセスで必要な振幅データをまったく有していない。
【0033】
位相相関は、振幅依存「圧縮」信号を生成するために差分位相検出器データと振幅データを使用する。それは、信頼出来るRSLSと単パルス機能のために必要な完全16チップ処理ゲイン(PG:Processed Gain)振幅データを提供する。振幅信号は、CFARプロセスのためにも使用可能であるが、CFARのために振幅依存信号を有することは、ノイズ、ジャミング及び干渉のために調整が必要なノイズ振幅推定器が必要である。位相相関器42、46は、プレアンブル検出が宣言された時にのみ、プレアンブルの検出や、位相振幅チャネルを記録するために使用される。
【0034】
プレアンブル決定ロジック回路48は、奇数と偶数SUMチャンネル26、28の出力を、応答経路サイドローブ抑制(RSLS)と、OMNIとDIFFレーダ振幅信号を受信する単パルス回路49に送る。SUMチップセットとプレアンブルの公知の固定コードを使用して、OMNI、DIFFプレアンブル信号は圧縮されて、相関されたプロセスゲイン(PG)信号は、単パルスとRSLS機能にとって利用可能である。第一に、RSLSテストが達成される。プレアンブルがRSLSテストに失敗した場合、プレアンブルはそのシステムから消去される。十分な数のプレアンブルが拒否された場合、このプレアンブルに関係するデータセットは無視される。
【0035】
単パルスデータは、レベル1とレベル2のOMNI、DIFFの圧縮信号から抽出される。対象物位置はレベル2レポートの一部分だから、レベル2の単パルスは必要ない可能性がある。しかし、レベル2単パルスは、可能性ある将来の使用のために抽出される。RSLSテストを通過した各々のプレアンブルのために、単パルスデータは、RSLSと単パルス処理機能49によって計算される。ロガリスムDIFFを引いたロガリスムSUM、ビーム側信号と、このビーム側に関係したデルタ位相を含むデータセットは、プレアンブル決定論理回路に戻されてそこに記憶される。プレアンブル決定論理回路48が、レベル1またはレベル2のプレアンブルを識別した時、最終的な単パルスデータは、適切な平均処理とロジック選択処理を使用して、各々のプレアンブルに記憶された個々の単パルスから計算する。この単パルスデータは、データセットによって報告される。RSLSと単パルス回路49はまた、RSLS禁止信号とデルタ位相信号を、プレアンブル決定ロジック回路48に提供する。
【0036】
プレアンブル決定ロジック回路48も、データ選択ロジック回路50とウォルシュ相関器システム52に信号を提供する。データ選択ロジック50は、必要な遅延を提供し、ウォルシュデータ相関器52をスタートするためのタイミングを設定する。
【0037】
ウォルシュ相関器システム52は、レジスタ54と、データ決定回路56と、エラー検出/訂正回路(EDAC)58を含んでいる。レジスタ54は、奇数データ信号と、偶数データ信号を出力する。奇数データ信号は、レジスタ54と、データ決定回路56の間に接続される第一のウォルシュデータ相関器セット60に入力する。偶数データ信号は、レジスタ54とデータ決定回路56の間に接続される第2のウォルシュデータ相関器セット62に入力される。第1及び第2のウォルシュデータ相関器セット60、62は、好ましくは、16個の相関器を含んでいる。データ選択ロジック回路50は、ウォルシュ相関器システム52の中のレジスタ54に入力する。データ決定回路56も、データインジケータとデータ閾値信号を受信する。各々の相関器は、16個の可能性あるデータシンボルのうちの1つを識別するために使用する適当なウォルシュ機能を含む。データの開始を示すT0パルスでマークされた入力データセットは、最初は、拡散機能リストからの拡散機能を使用して、シンボル毎に収束する。レベル1に関しては、拡散機能は、システムから受信したCOMSEC拡散インデックスによって提供された機能である。どの拡散インデックスが、現在のデータセットのために使用されるのか示しているプレアンブル検出から報告されたCVIによって、レベル2の拡散インデックスが選択される。
【0038】
各々のデータシンボルは、現在、すべての16個のウォルシュ相関器で相関を取り、最も高い相関値が、その特定のシンボルに記憶された4データビットを識別する。すべてのシンボルと、奇数と偶数機能と、現在のT0マークからのプラス、マイナスのワンチップスタートのために繰り返される。6個すべてのデータセット、相関合計、各々のシンボルのための関係する相関値は、ローカルメモリに記憶される。すべてのシンボルを相関させるとすぐ、最良のセットは、最も高い相関合計を有するセットと識別される。相関合計が、システムによって設定されるデータ閾値レベル以上である時に、そのデータを認めるデータ決定機能によって、最終的なデータ検出決定が行われる。それが認められた場合、このデータセットが、EDAC機能に対して有用になる。
【0039】
EDACプロセス58は、レベル2のデータセットでのみ実施される。レベル2のレポートが識別されて、データセットが、レベル2のデータ閾値テストに合格すれば、一度に11個のシンボルのグループが、EDACプロセス58に送られる。EDACプロセス58は、データセットを評価して、このデータが、単一のエラー訂正か、二重のエラー訂正(消去プロセス)か、またはどちらも必要としないかを判断する。エラーが検出された場合、EDACプロセス58は、エラーを訂正して、その訂正した値で、11個のシンボルデータにオーバーライトする。このプロセスは、11個のシンボル毎の3つのセットすべてに繰り返される。訂正されたデータは、現在、正しい暗号解読のために、暗号コンピュータ64に報告される。
【0040】
図1のモード5検出システム20の構成要素のための適切な構造を、図2〜13を参照にして述べる。
【0041】
[信号スプリッタ24]
図2を参照すると、信号スプリッタ24は、外部受信機22からの16ビット振幅信号と、8ビット位相信号を受信するために配置されたデータデバイダ64を含む。データデバイダ64も32MHzクロック信号を受信する。データデバイダ64は、奇数チャンネルのための16ビット奇数振幅データと8ビット奇数位相データを生成して、偶数チャンネル28のための16ビット偶数振幅データと、8ビット位相データを生成するために入力振幅データ、位相データを処理する。データデバイダ64も、32MHzクロック信号入力を、奇数チャンネル26と偶数チャンネル28のための16MHzクロック信号に分割する。
【0042】
出力バッファ66は、奇数振幅信号、奇数位相信号、及びデータデバイダ64からの16MHzクロック信号のうちの1つを受信する。好ましくは出力バッファ66と同一である出力バッファ68は、偶数振幅信号と、偶数位相信号と、データデバイダ64からのその他の16MHzクロック信号を受信する。出力バッファ66、68の各々は、対応する有効なクロックが設定された時、有効データを維持する。
【0043】
[差分位相検出器(Differential Phase Detector)30、34]
図3を参照すると、差分位相検出器30は、奇数チャンネル26のためにマークとスペース信号を生成する。差分位相検出器34は、好ましくは、差分位相検出器30と同一であるように形成されると理解されるべきである。従って、差分位相検出器30のみを、ここで詳細に述べる。出力バッファ66から出力された8ビット位相信号は、位相コンバータ70に入力される。位相コンバータ70の出力は、信号を、時間τ遅延させる遅延回路72に入力される。遅延回路72の出力と、位相コンバータ70の出力は、その2つの信号入力を合計するデコーダ74に入力される。デコーダ74出力は、閾値回路76に入力される。
【0044】
0°乃至360°で、スプリッタ24によって報告される各々の新しい入力チップ位相は、±180°に変換される。このチップ位相は、遅延時間τ=62.5nsに対応する1/16MHzの1チップ時間、遅延する。デコーダ74は、完全360°の範囲における位相の連続性を保ちつつ、新しい入力チップ位相から過去のチップ位相を減算し、マイナス又はプラスの可能性の差異のサインを発見する。この位相のサインの推移は、マークとスペース信号を生成するために使用される。ワンチップ時間の間、信号はプラス方向(スペース)又はマイナス方向(マーク)に90度、「移動」するので、プラス又はマイナスのサインを、明らかに抽出することが出来る。
【0045】
差分位相検出器30、34は、チャンネル当たり16MHzで奇数と偶数のサンプルデータを処理して、マークとスペース値を検出する。理想的には、連続するチップの間の位相の差異は、±90度である。しかし、ノイズと内部シンボル干渉(ISI)によって、期待される異なる実際の位相は、最大90度より小さい可能性のある任意の値Δθである。位相差がプラスの場合、スペース(1)が宣言される。マイナスの方位角値は、マーク(0)として報告される。
【0046】
位相検出器出力SKのために構成された位相検出器論理式は、次のように表現出来る。
±180度への変換
もし(方位角[k]>180°)ならば、
方位角[k]=方位角[k]−360°
位相の連続性を保持するためには、位相差デコーダは、±180度で作動し、次の機能を達成しなければならない。
DeltaAz[k]=方位角[k]−方位角[k−1]
もし(DeltaAz[k]>180°)ならば、
DeltaAz[k]=DeltaAz[k]−360°
もし(DeltaAz[k]<−180°)ならば、
DeltaAz[k]=DeltaAz[k]+360°
位相検出器出力は、次によって与えられる。
もし(DeltaAz[k]>=0)
PhaseDetOut[k]=1
その他、
PhaseDetOut[k]=0
【0047】
[データデコーダ32、36]
データデコーダ32、36は、差分位相検出器30、34によるスペースとマーク信号出力によって稼動して、航空機のトランスポンダの中の差分データエンコーダ(図示せず)によって符号化されたオリジナルデータを抽出する。図4を参照すると、データデコーダ32は、スペース=1、マーク=0を示す信号Vin(k)を受信する排他的OR(XOR)ゲート80を含んでいる。排他的ORとは、もしもの場合と演算子の1つが真(true)値を有する場合に限り、真の論理値になる2つの演算子に関する論理演算である。サンプルkの出力は、過去の出力を有した入力のXORである。XORゲート80は、遅延回路82に入力される信号Vout(k)である。遅延回路82は、入力Vin(k)と組み合わせるために、XORゲート80の入力にフィードバックする信号Vout(k–1)を生成する。データデコーダ32の論理機能は、
【数1】

である。
出力機能は、復号されたデータである。第一のデータチップ以前のチップの任意の「0」か「1」の性質のために、デコーダ32は、オリジナルデータ、又はオリジナルデータの逆数を生成することが出来る。その結果、プレアンブルとデータに対するサーチ処理は、データまたはその逆数との相関を探す必要がある。
【0048】
[プレアンブル位相相関プロセス]
図5はプレアンブル位相相関プロセスの1つのチャンネルを示す。プレアンブル位相相関プロセスは、データデコーダ出力と、ノイズからプレアンブルを抽出するための規定のマスクを使用する。図14は、プレアンブル位相相関器から出力された信号を図示する。データデコーダ0/1データビットは、16ビット長のFIFOレジスタに記憶され、相関器102に記憶された0111 1000 1000 1001などのプリセットコードとクロスで相関させる。排他的ORゲートアレイ104は、FIFOレジスタ100と相関器102の間に接続されている。排他的ORアレイ104は、加算器110に接続された出力を有する。相関機能は、本質的に、乗算と加算プロセスであって、そこで、各々のデータチップセルが、コードと比較され、その結果は、データセルが一致する場合には、プラス1(+1)に設定され、データが異なる場合には、マイナス1(−1)に設定される。相関結果は、すべてのセルの結果の合計である。加算器110からの信号出力Vout(K)は、次のように書くことが出来る。
【数2】
ただし、
VDATA(i)=データレジスタ中の各々のセルに記憶された位相データ(1/0)
VCODE(i)=各々のセルに、ダイレクト又は逆数コードレジスタに記憶されたコードデータ(1/0)
XOR’=コードとセル中のデータが一致した場合には、出力は+1で、一致しない場合には、−1である改良されたXOR機能
である。
【0049】
正確な一致のための相関器出力は、入力信号と相関器コードが等しい場合には、プラス値の16であり、データが、データデコーダ32又は36の1つによって逆数にされた場合には、−16である。それ故に、両方の状態を検出するために、プラスとマイナスの値のためのテストを行う必要がある。
【0050】
位相相関器は、振幅に対して独立しており、すべてのノイズ振幅レベルにおいて、同様の偽アラームレートを保持して、正しい閾値を与えることによって、プレアンブルの決定を行うことが出来る。計算され、測定されたプレアンブル偽アラームレートと、閾値の設定とS/Nの関数としてのプレアンブル検出の確率は、以下に与えられる。
【0051】
[プレアンブル位相相関偽アラームと検出確率]
信号がプレアンブル相関器38に与えられる場合、相関機能が、上記の相関機能を使用して、プレアンブルコードを発見しようと試みる。相関が成功であると宣言した閾値は、ここで計算された必要な偽アラームレートの機能である。
【0052】
n試行のうちのk回の成功した相関の二項確率P(k)は次の式で与えられる。
【数3】
ただし、p=単一チップの検出確率
【0053】
ノイズの場合、pは、相関器に記憶された「0」又は「1」のチップを得る確率である。ノイズの場合、p=0.5である。信号の場合、pは正しいチップを有する確率であり、信号対ノイズ比と、内部シンボル干渉(ISI:Inter Symbol Interference)の関数である。
【0054】
n=16チップの単一シンボルの場合と、少なくともK個のチップに関して、成功の相関が達成された場合には、相関確率は、Kからn(チップの数)の確率の累積確率である。
【数4】
各々のプレアンブルテストは2つの平行なチャンネル(偶数と奇数)に関して行われ、少なくとも1つのチャンネルが検出された時、成功のプレアンブル検出が宣言されるので、プレアンブルのシンボルを検出する確率は、
【数5】
である。
【0055】
シンボルセットの検出が成功すると、成功した検出が公表される。レベル1は次のことを要求する。P2シンボルが検出された場合、CVI、CVI+1及びCVI−1で規定される3つの位置のうちの少なくとも1つと、期待されるセルと、現在のセルk、セルk−1とセルk+1(単一セルの位置変化のための防止のために)のうちの少なくとも1つにおいて、P1シンボルを検出しなければならない。従って、P1は、9個の可能性ある位置でテストされる。
【数6】
レベル1の検出確率は、次のように与えられる。
【数7】
Kの設定は、システムの偽アラームレートを規定する。16個の正しい相関関係のうちのK(K個が一致して、16−Kが一致しない)に関して、相関器出力がK−(16−K)になる。
【0056】
K=14(16チップのうちの14が一致するか、相関器閾値が12に設定される)の場合、ノイズ偽アラームPは、シミュレータで、0.000323として測定され、その値は、16MHzサンプリングレートの場合には、毎秒約5100偽レポートと同等である。Kが15に選択される場合には、測定偽アラーム確率は、6.6×10−6であり、その偽アラームレートは、毎秒約105に減少させられる。
【0057】
4個のプレアンブルのうちの3個が成功裏に検出された場合に、検出が宣言される場合を除いて、レベル2のプレアンブルの検出プロセスは、レベル1のプロセスと同等である。従って、検出確率は、第一のプレアンブルとその他3つのプレアンブルのうちの2つを検出する確率と、第一のプレアンブルとその他の3つのプレアンブルのうちの3つを検出する確率と、第一のプレアンブルを検出しないで、第二のプレアンブルと最後の2つのプレアンブルを検出する確率の合計である。第一のプレアンブルを検出する確率はPS1であり、その他のプレアンブルはPS2(テストされた3CVI位置と、期待されたセルのプラス、マイナスを反映して)であるから、確率Pは、
【数8】
である。
この方法は、プレアンブルに対して、特別な選別は何も行わず、すべての異なるCVIからのレポートは、検出プロセスの開始にとって相応しいと仮定している。
【0058】
モード5検出プロセスは、受信機のベースバンドデータを受信して、プレアンブルと、レベル1とレベル2の検出のためのデータシンボルを抽出する。モード5の最小シフトキー(MSK:Minimum Shift Key)変調(良く知られた技術)によって規定された16MHzチップレートにおいて検出が行われ、それは、すべてのノイズ状態における一定の偽アラームレート(CFAR:Constant false Alarm Rate)を保持するためのセットの閾値を使用する。信号が一旦、プレアンブル閾値を越えると、検出器は、レベル1とレベル2のプレアンブル設定で規定されるすべてのその他の位置に存在する可能性あるプレアンブルのためのデータを評価するサーチ機能を使用する。プレアンブルが検出されて、このプレアンブルに続くデータが処理される。そして、それがデータ閾値を通過すると、データが抽出されて、システムに報告される。レベル1とレベル2のプレアンブル検出確率は、S/NとK設定の関数である。
【0059】
[プレアンブル位相振幅相関(振幅圧縮)]
位相振幅相関は、公知の相関コードを使用してプレアンブルデータを圧縮することによって処理ゲインを保持する整合フィルタとして考えることが出来る。そのプロセスは、図6に示されている。図15は、プレアンブルの振幅の圧縮を図示している。
【0060】
位相振幅相関(振幅圧縮)は、振幅データ処理を加えた位相相関関係と似ている。正しい運用のためには、振幅データは、必要な動的範囲をサポートするために十分な数のビットと直線的な関係でなければならない。相関プロセスにおける相関器合計によって使用される各々のチップのサインを確立するために、相関プロセスは、位相データを使用する。
【0061】
圧縮されるべき位相データと振幅データは、それぞれFIFOレジスタ120、122に入力される。XORゲート124のアレイはFIFOレジスタ120のデータを比較し、レジスタ126に記憶されたプレアンブルコードマスクと比較する。乗算器アレイ125は、コードマスクレジスタ126の出力と、FIFOレジスタ122の対応ビットとの積を形成して、その結果を、信号Vout1(k)を生成する16ビット加算器128に提供する。
【0062】
各々のデータチップkを位相と、振幅φkとVkで表す。増分時間kの位相振幅相関プロセスは、時間kに先行する16チップのコヒーレント合計(Voutk)のためのXOR’機能によって実行される。
【数9】
サイン値はXOR’機能によって、下記のように計算される。
【数10】
i=0乃至15
ただし、
φk−i=kから始まり、16チップ戻ったデータレジスタの中の各々のセルに記憶された位相データ(1/0)
VCODE(i)=各々のコードレジスタセル(プレアンブルコード)に記憶されたコードデータ(1/0)
XOR’=セル中のコードとデータが一致する場合は、出力が+1であり、一致しない場合には、−1である改良されたXOR機能
である。
【0063】
この相関プロセスの結果は、相関機能によって提供されるように、処理ゲインを有した、プレアンブル一致フィルタの「圧縮」信号振幅である。全くロスのないコヒーレントな処理を仮定すると、その理論的処理ゲインの限界は12dBである。
【0064】
同様な処理は、OMNI及びDIFFチャンネルにおいて実行される。SUM位相チップと固定プレアンブルコードは、圧縮コードを生成するが、この圧縮コードは、OMNIとDIFF振幅信号に加えられる時、RSLSと単パルスに必要なPG振幅データを提供する。
【0065】
[プレアンブル決定論理回路48]
図7に示したプレアンブル決定論理回路は、プレアンブル検出と単パルスの計算に対する補助の2つの主要動作を提供する。偶数振幅相関器116からの振幅偶数合計と、奇数振幅相関器117からの振幅奇数合計は、振幅リーダ130に入力される。奇数位相相関器42からの位相奇数合計が、プレアンブルシンボル検出器132に入力され、偶数位相相関器46からの位相偶数合計は、プレアンブルシンボル検出器134に入力される。プレアンブルシンボル検出器132、134は両方とも、プレアンブル閾値信号を受信して、単一プレアンブル検出器138に出力信号を提供する。
【0066】
位相奇数合計信号と位相偶数合計信号も、検出されたプレアンブルデータ記憶装置140に入力される。検出プレアンブルデータ記憶装置140は、相関器40、42、44及び46によって提供される奇数、偶数SUM位相と振幅の相関データを受信して、可能性のあるプレアンブル検出のためのデータを評価する。新しいプレアンブルシンボルが検出されると、その機能は可能性のあるその他のプレアンブルをサーチして、プレアンブルのスペースと入力データタイプに基づいて、レベル1又はレベル2と識別する。この情報は、奇数と偶数チャンネル26、28のデータ解読処理を開始させるT0トリガ信号を生成するために使われる。
【0067】
プレアンブル決定論理回路48は、RSLSと単パルス計算を終了する。新しいプレアンブルが検出されると、このプレアンブルのために、RSLS禁止パルス、単パルス信号、DV及びビームサイド情報を返信するRSLSと単パルス機能49に報告する。このデータは、最終的なプレアンブル単パルス評価のために使用される。
【0068】
相関させた奇数と偶数位相と、振幅データストリームに含まれる相関器38から出力された位相と振幅SUM信号は、可能なプレアンブル検出のためにここで評価される。そのために、現在の位相と相関させた奇数と偶数入力(絶対値)は、それぞれプレアンブルシンボル検出138によってテストされる。少なくとも、それらのうちの1つが閾値を越えた場合には、プレアンブルが検出されたストローブ信号が生成される。このストローブ信号は、一連の事象を稼動させる。まず第1に、それは、プレアンブル検出時より前に、チップ振幅サンプルの平均を取り、現在のプレアンブルの振幅を計算する平均136機能を稼動する。次に、それは、検出されたプレアンブルデータの記憶装置140に記憶された他のプレアンブル処理142に対するサーチを開始して、レベル1とレベル2の検出を決定する。次に、振幅相関器プロセスから受信した相関した奇数と偶数SUM振幅を記録して、RSLSと単パルス49に報告して、そのRSLSと単パルス49では、現在のプレアンブルと関係するプレアンブルRSLS禁止ストローブ信号と単パルスデータを計算する。
【0069】
最後に、将来の使用のために、検出されたプレアンブルデータ記憶装置140の中の現在のプレアンブルに関係したすべてのデータを記憶する。プレアンブル検出ストローブ信号は、奇数又は偶数チャンネルが、このプレアンブルシンボルのために使用されるかどうかを示す1あるいは2である。
【0070】
平均機能136は、時間的に戻ってNチップ(デフォルト値N=8)をサーチして、奇数と偶数チャンネルのために、現在の検出されたプレアンブルの平均レベルを計算する。このデータは、プレアンブル検出セットの最終検証のために必要である。
【0071】
過去のプレアンブルの論理回路142に対するプレアンブルサーチは、レベル1のP1プレアンブルと、レベル2検出のためのP3、P2及びP1を時間的に遡って捜すことによって、他の可能性あるプレアンブルをサーチする。そのために、最大のCVIを含む最大信号長に対して等しいか、それ以上である最小長の遅延線を実行する必要がある。この時間は、少なくとも28μsecであるトータル遅延時間に対して、26.625μsecプラス、S1の最大値、2.875μsecであるレベル2の信号長によって設定される。
【0072】
現在位置からサーチする場合、レベル1のP2プレアンブルとレベル2のP3、P2及びP1プレアンブルのすべての組合せが評価されなければならない。プレアンブルサーチは、CVI、CVI−1、CVI+1ずらして(スタガー)設定された、予定のプレアンブル位置に対して実施して、そのサーチは、レベル1とレベル2プレアンブルが存在するかどうかを評価することである(新しいプレアンブルは、レベル1とレベル2の両方の妥当な解決を有することになり、その中の一番可能性ある解決だけが真である)。可能性あるサンプルエラーをオフセットするために、そのサーチは、現在のセルと、現在のセルからプラスとマイナスしたセルに対して行われなければならない。サーチは、奇数と偶数チャンネルに対して独立して行われる。どれかのサーチで、決定が成功した場合、可能性あるデータを示す、T0位置のデータストローブ信号が報告される。奇数と偶数の二重チャンネルによって、同じ対象物が2度マークされ、チップ長の半分でオフセットされる可能性があることを知っておく必要がある。その2つの報告を1つにまとめるために、適切なアルゴリズムが後に提供される。
【0073】
レベル1のサーチロジックは以下の通りである。
相関器によってマークした時間より前に、8つのデータセルの平均を取って、現在のプレアンブルの振幅を記録する。
新しいプレアンブルから出発して、時間的に後ろにサーチする。
3つのCVI(CVI、CVI−1、CVI+1)のスタガー時間をループ化する。
現在のスタガー時間と、その3つの位置は、Tstart−1、Tstart及びTstart+1。
プレアンブルが記憶され、RSLS禁止ビットによってマークされていない場合、記憶されたプレアンブルの平均振幅を読み取る。振幅が、現在のプレアンブルの3dB以内にある場合、レベル1の検出が宣言される。T0(D1エンド)位置を計算して、単パルスデータを計算する。
【0074】
P1が起こる可能性のある場所の位置、つまり、P2、kに対するiStartは、次の式から計算される。
i=k−(3.0+S1)/0.0625)−1
S1は、CVI、CVI−1及びCVI+1によって報告されたスタガー位置
【0075】
[レベル2サーチ]
相関器によってマークされた時間以前に、8個のデータセルに関して平均を取ることによって、現在のプレアンブルの振幅を記録する。
新しいプレアンブルから出発して、時間的にサーチバックする。
3つのCVI(CVI、CV−1、CV+1)をループ化する。
(最初の仮定サーチ)
検出されたパルスは、P4であると仮定する(4個のうち3個を検出しなければならない)。
3つの可能性ある遅延場所に対する各々のCVIループに関して、P3位置によって規定するTstart、Tstart−1、Tstart+1。もし検出が行われた場合、その検出を記録する。
【0076】
P2位置によって規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。検出が行われた場合には、その検出を記録する。
P1位置によって規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。検出が行われた場合、その検出を記録する。
少なくとも3個のプレアンブルうちの2個を検出した場合には、その検出したプレアンブルの最大と最小振幅が削減され、最小対最大振幅が0.5より大きい場合には、レベル2の検出を宣言する。
T0(D1エンド)の位置を計算して、単パルスデータ(以下に記す)を計算する。
(第二の仮定サーチ)
検出されたパルスはP3(すべての3を検出する必要がある)
P2位置で規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。もし検出が行われたら、その検出を記録する。
P1位置によって規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。もし検出が行われたら、その検出を記録する。
P2とP1プレアンブルが検出された場合、その検出されたプレアンブルの最大と最小の振幅が削減され、もし最小と最大振幅0.5よりも大きい場合には、レベル2の検出が宣言される。
T0(D1エンド)の位置を計算して、単パルスデータ(以下に記す)を計算する。
【0077】
4個のプレアンブル全部が存在する場合には、第二の仮定が第一に解読されて、後で、第一の仮定によってオーバーライトされることを覚えておくべきである。最初のサーチ位置、P1、P2、P3に対するi、P4からのkセルは、以下のように表される。
i=k−(26.625+S1)/0.0625)−1
i=k−(17.250+S2)/0.0625)−1
i=k−(5.000+S3)/0.0625)−1
【0078】
最初のサーチ位置、P13に対するP1とP2に対するiは以下のように表される。
i=k−(21.625+S1−S3)/0.0625)−1
i=k−(12.25+S2−S3)/0.0625)−1
【0079】
レベル2のプレアンブル決定に関して、このプレアンブルを検出するために使用するCVIは、正しい拡散機能が、データ処理の間に使用出来るように、記録され、データプロセスに送られなければならない。
【0080】
プレアンブルが検出されたストローブ信号が検出された時、RSLSと単パルス処理49が稼動される。第一に、相関機能によって報告されるように、振幅が相関されたSUMが報告される。その機能は、奇数と偶数振幅から、より大きな相関関係を有するものを選択して、それをSUM信号として使用する(サンプルと位相との関係によって、たった1つのチャンネルが、正しく相関される)。選択された振幅合計と、プレアンブルが検出されたストローブ信号は、RSLSと単パルスプロセスに報告される。この機能は、次の式において、RSLS禁止パルス、単パルスビームサイド、このビームサイドに関係する位相差と、単パルス信号DVを計算する。
DV=Log2(SUM)−Log2(DIF)
このデータは、現在のプレアンブルのために記録された奇数と偶数プレアンブルデータと一緒に、検出されたプレアンブルデータ記憶装置に記録し、記憶される。
【0081】
過去のプレアンブル論理回路のサーチが、他のプレアンブルのために、検出されたプレアンブルデータ記憶装置をスキャンする場合、それは、RSLSによってマークされたプレアンブルを、サイドローブから出たものとして無視する。しかし、妥当なプレアンブルが検出された場合、それは、このプレアンブルに関係する単パルスデータを抽出する。レベル1又はレベル2のプレアンブルセットが検出された場合、そのプレアンブルのために記録された単パルスデータは、単パルス平均論理回路によって処理されて、最終的な単パルスデータが計算される。
【0082】
レベル1単パルスデータは、次の様に計算される(奇数と偶数のチャンネルは別々に)、もしその2つのプレアンブル単パルスデータが同じサイドにある場合であり、
abs(DV1−DV2)<K1、という条件の下では、
2つのプレアンブルは、同じ方位角から出ており、その単パルスの方位角信号は次のように表される。
【数11】
ビームサイドデータと同様にこれらの値は、T0パルスと共に報告される。
【0083】
もし単パルスデータがこれらの必要条件に合致しない場合には、その単パルス方位角データは無視され、失敗した単パルスデータは、報告される。レベル2に関して、サーチプロセスによって識別された3又は4個のプレアンブルは、次の様に評価される。同じサイドにあるすべてのプレアンブルは1つにまとめられる。1つのメンバー以上を有する各々のグループに関しては、もし、より大きいもの(DVmax)が、より小さいもの(DVmin)より大きいK2以上である場合には、そのセットは、同じ対象物から派生したと考えられる。そして、DVは全体グループの平均であり、単パルス方位角データは報告される。1個のグループ以上のグループが、上記の必要条件に合致するが、異なるサイドから派生している場合には、単パルスデータは無視され、「失敗」した単パルスは報告される。もし、いずれのチャンネルのグループも上記の基準に合致しない場合には、単パルスデータを拒否し、「失敗した」単パルスを報告すること。単パルスの情報は、T0ストローブ信号に付加して、その情報を、システムに報告するデータセットの一部にすることが出来る。
【0084】
[RSLSと単パルス処理49]
図8、9に示されるRSLSと単パルス処理は、プレアンブル決定論理回路48と共同で作動して、RSLSと単パルスデータを生成する。それは、単一プレアンブルシンボルRSLSステータスと、このプレアンブルのための単パルス値を計算して、それをプレアンブル決定論理回路48に報告するが、このプレアンブル決定論理回路では、このデータが評価されて、いずれかの所与のデータアイテムと関係するプレアンブルセット全体のための最終単パルスが計算され、報告される。ここで生成されたRSLS禁止パルスは、サイドローブによって検出されたプレアンブルが、この処理に使われるのを防止する。
【0085】
RSLS機能は、OMNI(あらゆる参考例)アンテナ振幅データを、32MHzレートで、受信機22によって提供されたものとして認可して、そのOMNIレベルをSUMレベルと比較することによって、信号がメインビームから派生したものか、サイドローブから派生したものなのかを判断する。
【0086】
図8に示すRSLS処理は、受信機22からの32MHz OMNI振幅信号を受信する。スプリッタ160は、この信号を2つの16MHz奇数、偶数チャンネルに分割して、それは、それぞれ振幅圧縮奇数、偶数機能162、164に送られ、その機能162、164において、信号は圧縮されて、付加的なPG S/N改良を実現する。データデコーダ32、34によって生成されたSUM位相チップと、固定プレアンブルコードは、OMNI振幅信号圧縮のために使われる。奇数と偶数の圧縮データは、今、選択OMNI振幅機能168に送られて、その機能168において、奇数と偶数OMNI信号は、プレアンブル決定論理回路48から受信したプレアンブルが検出されたストローブ信号によって制御される。プレアンブルが、プレアンブル決定論理回路48によって報告された場合、圧縮された奇数と偶数OMNI信号が評価され、2つのうちの強い方が、RSLS処理49のために使用される。この機能が必要である理由は、ユニークなサンプル場所で、位相転移が起こった場合には、たった1つのチャンネルだけが適切な圧縮を提供するからである。最後に、改良されたS/N比を提供するために圧縮されたOMNI信号は、プレアンブル決定論理回路によって提供されるSUM圧縮信号と比較される。RSLSゲート49決定レベルは、RSLS閾値(Kファクタ)によって、オペレータ選択可能値の3dB乃至18dBに設定されるが、これは、SUM対OMNI比を1.41乃至7.94に平均化する。
【0087】
RSLS機能は、プレアンブル決定論理回路48によって報告されるように、各々のプレアンブルで作動する。RSLSゲートが稼動して、プレアンブル決定論理回路48に報告されると、そのプレアンブルは、拒否されて、もし十分な数のプレアンブルが拒否されると(レベル1では1つ、レベル2では少なくとも2つ)、このプレアンブルセットに関係するデータは、データレポートのために考慮されない。データセット全体を拒否するためにRSLS49を使用することは勧められない理由は、このデータセットには、妥当なプレアンブルセットが存在するからである。プレアンブルパルス(S/N比を改善するために)全体の単純な非コヒーレントな統合に対する圧縮を使用する利点は、時間分解能は保たれ、その間に、S/N比が改善され、密集したレポートを独立して処理することが可能になる。
【0088】
RSLSゲート49出力を使用する時、ゲートが実際に、プレアンブルの予想された位置とオーバーラップすることを保証するために、タイミングは注意深く評価されるべきである。
【0089】
図9に示す単パルス処理は、受信機22からの32MHz DIFFチャンネル振幅と位相信号を受信して、単パルスビーム評価のために必要なプレアンブルの単パルス信号を計算して、それをプレアンブル決定論理回路48に報告するが、そのプレアンブル決定論理回路48では、それはさらに平滑化され、単パルステーブルへ指令するために適切な信号を生成する。
【0090】
受信機22から入力された32MHz DIFF振幅信号は、2つのチャンネル、奇数と偶数に分割される。各々のチャンネル信号は、奇数と偶数のチップSUM信号を使用して圧縮され、固定プレアンブルコードは、振幅圧縮偶数、奇数機能176、178に記憶される。DIFF圧縮された振幅奇数、偶数信号は、その2つの信号を比較して、出力のために高い方を選択する選択DIFF振幅機能179に送られる。選択されたDIFF振幅179も、プレアンブル決定論理回路48から、プレアンブルを検出したストローブ信号を受信し、プレアンブルが検出されたことを示す。かつ、プレアンブルが存在するときにのみ、選択したDIFF振幅を報告する。ログと差機能180は、SUMとDIFFを相関させた信号を、ログベース2値(このスケーリングは、SIF単パルスデータで実施したように行う)に変換して、その2つのログ値を引いて、差信号DVを生成する。
DV=Log2(SUM)−Log2(DIF)
DV信号は、プレアンブル決定論理回路48に戻され、そのプレアンブル決定論理回路48で、最終的なDVの計算と平滑化のために、他の記憶したプレアンブルと一緒に使用する。
【0091】
単パルスビームの方向は、位相SUMと、受信機22で受信した位相DIFF信号から計算される。切断テーブル182は、報告した位相の3MSBを使用して、8ビット位相データを4ビットに切断する。DIFF位相は、システムから受信した位相オフセットによってオフセットされ、機会の対象物から計算して、対象物のビームサイドに従って、単パルス位相シフトを約0度と約180度に設定する。各々の位相チャンネルを、LSB当たり27.692度と、ゼロ乃至332.304度の範囲を有する位相読み込みモジュロ13に短縮される。位相差デルタ位相は、次のように計算される。
デルタ位相=短縮された合計位相−短縮された差位相
【0092】
プレアンブル検出論理回路で受信したプレアンブル検出ストローブ信号が、プレアンブルが検出されたことを示している時、デルタ位相186が実行される。その時、処理によって測定されたデルタ位相は、記録され、報告される。デルタ位相信号は、理論的には、(対象物のビームサイドによって)2つの値、ゼロと180度を保持することになる。しかし、ノイズとシステムエラーによって、ゼロ値は、オリジナル値から幾分、プラス又はマイナスの範囲を浮遊する可能性がある(マイナス値は、360度のモジュロ13において、高いプラスの数字として表される)。180度の値も、中心値を周囲で浮遊する。最終的なビームサイドの選択は、デルタ位相値に基づいて「0」または「1」を出力する256ビームサイドテーブルによって決定される。ビームサイド信号とそれに関連したデルタ位相は、さらなる処理のために、プレアンブル決定論理回路48に戻される。この場所では冗長と思われるデルタ位相が保持されて、別々のモード5位相オフセット計算が、システムによって達成される。モード5システムは、SIF処理とは異なるIFチャンネルを使用する場合には、それが必要である。
【0093】
[ウォルシュデータ相関器システム52]
ウォルシュ相関器システム52は、奇数、偶数チップデータストリングと、どこでデータが始まるか示したT0ストローブ信号とを受信する。それは、16ビットウォルシュ相関器60、62を使用して両方のチャンネルの相関テストを実施して、入力ストリングに記憶されているデータを識別し、その最良のデータセットが、システムに報告されることを確認する。図10に示すプロセスは、プレアンブルデータは、データ相関プロセスで必要な時間パルスを抽出するために使用される入力時間プロセスと、入力16ビットデータを、ウォルシュコード機能と相関させ、4ビットデータと、相関値を抽出する相関と決定プロセスから成っている。最後は、決定プロセスで、このプロセスにおいて、最良のデータセットと検出決定が実行される。
【0094】
収束プロセス54は、プレアンブル時間から開始して、シンボルデータが記録される前に、カウントされるべきチップの数を計算するタイマ200を含んでいる。プレアンブルエンド(レベル1にとってはP2、レベル2にとってはP4)に対してD1エンドの位置は、正確に2.0625μsecであり、その値は、16MHzサンプリングレートでは、33チップと同じである。しかし、最後の3つのチップの前に、プレアンブル決定が完成して、プレアンブル決定ポイントから、36チップであるD1エンドまでのトータルのチップ計算をする。D1の最初まで戻るために、スタートのD1は、それをする前の18チップであって、プレアンブル決定ポイントから18チップをカウントすることになる。タイマは記録するべきシンボル数を設定するが、レベル1では9で、レベル2では33である。
スタートセル=プレアンブルセル+18
シンボル=レベル1にとって9
レベル2にとって33
【0095】
タイマ200は、記録すべきシンボルの位置をマークするストローブ信号を生成する。これらのシンボルは、収束と記憶データ機能202によって一時に1つ処理されるが、この機能202では、データは、収束テーブル204から受信した拡散機能を使用して収束する。すべての256拡散機能を記憶するこのテーブルは、システムによって報告されるように、レベル1またはレベル2のインデックスが付けられている。レベル1に関しては、システムで報告されたインデックスが直接、使われている。レベル2の場合、選択されたインデックスは、記憶インデックステーブル206に記憶された3つの可能性あるインデックスのうちの1つで、プレアンブルで報告されたCVI使用信号によって選択される。拡散プロセスは、シンボルデータを有する拡散コードの桁上げを行わないビット毎のモジュロ2加算である。
(i=0、i<16、i++)に対して
//単一ビットを抽出する
ビット=拡散機能&0x0000001
シンボル[15−i]=シンボル[15−i]+ビット
もし、(シンボル[15−i]=2)
シンボル[15−i]=0、
拡散機能=拡散機能>>1、
【0096】
可能性あるサンプリングエラーをオフセットするために、そのプロセスは、プレアンブルによってマークされた時間に、T0位置からオフセットされた1個のチップ位置からのプラス、マイナスのために実施される。3個のデータセットは、相関プロセスのために、収束と記憶機能の中に記憶される。
【0097】
[データ相関]
ウォルシュ相関器機能52は、データレジスタ54(収束後)に記憶された入力データと、16ウォルシュコードとの相関を取り、最良のマッチングを発見する。相関機能は、次のように記述することが可能である。
【数12】
ただし、
VDATA(N)=データレジスタの中の各々のセルに記憶されたデータ
VCODE(N)=各々のセルに、ダイレクト又は逆数コードレジスタに記憶されたコード
XOR’=セルの中のコードとデータが一致する場合は+1、一致しない場合は−1
である。
【0098】
各々のシンボルは、16個のウォルシュコードすべてと相関を取り、最も高い相関値を、そのシンボルの4データビットの内容を決定するために使用する。すべてのシンボルに関してそのプロセスを実施して、相関合計と共に、各々のシンボルの相関値をデータに記憶する。プロセスは、1チップ位置に対するプラス、マイナスと、奇数、偶数チャンネルに対して繰り返す。従って、トータル6つのテストが、データセット(奇数と偶数セット、各々のセットの3つの位置)に対して実施される。
【0099】
ウォルシュ相関は、データセットの間の最良の分離を提供する特別コードセットを使用する。
char Walsh[16][16] = { {1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1}, {1,1,1,1, 1,1,1
,1, 0,0,0,0, 0,0,0,0},
{1,1,1,1, 0,0,0,0, 0,0,0,0, 1,1,1,1}, {1,1,1,1, 0,0,0,0, 1,1,1,1, 0,0,0,0},
{1,1,0,0, 0,0,1,1, 1,1,0,0, 0,0,1,1}, {1,1,0,0, 0,0,1,1, 0,0,1,1, 1,1,0,0},
{1,1,0,0, 1,1,0,0, 0,0,1,1, 0,0,1,1}, {1,1,0,0, 1,1,0,0, 1,1,0,0, 1,1,0,0},
{1,0,0,1, 1,0,0,1, 1,0,0,1, 1,0,0,1}, {1,0,0,1, 1,0,0,1, 0,1,1,0, 0,1,1,0},
{1,0,0,1, 0,1,1,0, 0,1,1,0, 1,0,0,1}, {1,0,0,1, 0,1,1,0, 1,0,0,1, 0,1,1,0},
{1,0,1,0, 0,1,0,1, 1,0,1,0, 0,1,0,1}, {1,0,1,0, 0,1,0,1, 0,1,0,1, 1,0,1,0},
{1,0,1,0, 1,0,1,0, 0,1,0,1, 0,1,0,1}, {1,0,1,0, 1,0,1,0, 1,0,1,0, 1,0,1,0} }
【0100】
16個の相関器が、各々のチャンネルのために実施されているが、そのうちの1つが、図11に図示されている。図11は、ウォルシュデータ相関器60の一部分を示す。データ相関プロセスは、第一のデータシンボルD1の予定時間から開始して、すべてのシンボルについて、一時に1つの割合で実施される。データVin(k)は、データレジスタ212に入力される。ウォルシュコードは、コードレジスタ216に記憶される。16ビットXORアレイ214は、入力データの対応ビットの内容とウォルシュコードと比較をする。XOR機能の出力は、出力信号Vout1(k)を提供する加算器218に入力する。
【0101】
データオーダとウォルシュコードオーダ(リストすべき大部分)とは注意深く一致させることが必要である。各々の相関関係のバイポーラ値によって、偽対象物の相関合計は、0に収束する傾向にあり、真の対象物合計は、プラス又はマイナス値(同相であるか、逆相であるデータによって)に収束することを記憶しておくべきである。最大絶対相関値は、レベル1に関して|9×16=144|、又はレベル2に関して|33×16=528|である。
【0102】
奇数及び偶数データセットと、各々のシンボルのための関連する相関結果と、各々のセットの相関合計は、報告すべき最終データセットを選択するデータ決定プロセスと相互関連するデータセット記憶機能に記憶される。
【0103】
[データ決定プロセス56]
データ決定機能は、すべてのテストと、偶数と奇数チャンネルの両方のために出力された相関器合計を読取り、データアイテムを認可するか、拒否するかの最終的な判断をする。相関合計(絶対値)は、レベル1又はレベル2の閾値と比較され、それがテストを通過した場合、データセットは妥当だと認められる。1個のセット以上が閾値を超えている場合、最も高い相関値のセットが選択されて、外部世界に報告される。この閾値レベルは、プレアンブルの閾値設定と組み合わされて、システム偽アラームPfa及び検出確率Pdを規定する。
【0104】
典型的には、シミュレーションによって記録されるように、レベル1とレベル2データセットのための結果、レベル2とレベル1のデータセット、プレアンブルのトリガ及び相関結果のストローブ信号は、時間関数として示される。レベル2のレポートは、低10dB S/N対象物のための168の相関レベルを有している。16dB相関レベルのレベル1の対象物S/Nは144(可能な最大値)である。
【0105】
分割プロセスによって、対象物決定は、2つの連続したセル(奇数、偶数チャンネルによって提供された)に出現可能である。そのような対象物を2度報告するのを防止するために、次のセルのデータをテストして、2つのうちの大きい方を選択する簡単なアルゴリズムが実行される。それは、現在と次のセルのスコアをテストして、もし現在のスコアがより大きい場合には、現在のセルが負荷され、カウンターを1増加して、次のセルをスキップする。
もし(abs(検出されたデータ[i].スコア)>=abs(検出されたデータ[i+1].スコア))
データ決定[i]=レベル1の検出
i=i+1
【0106】
[EDACプロセス58]
図12のフロー図に示したEDACプロセスは、ウォルシュデータ相関器52によって報告されたレベル2データセットに対して実行される。EDAC58は位置を識別して、11個のシンボルのグループの中の誤りの1つのシンボル又はそのエラー位置が知られている場合には、2つの誤りのシンボルを訂正する。この機能をサポートするために、レベル2のデータを、それぞれ11個のシンボルを有する3つのグループにおいて構成することにより、EDAC機能は、各々のグループに対して一時に実行することが可能になる。
【0107】
ウォルシュデータ相関器52は、11個のシンボルを有する各々のグループをEDACプロセス58に報告する。エラーレベルを評価するために、シンドロームと呼ばれるS1とS2値は、11個のシンボルを有する各々のグループのために計算して、ウォルシュ相関器によって記録されるように、各々のシンボルの相関レベルが評価される。以下にリスト化された事象の順番が、図13に示されている。
【0108】
2つのシンドローム、S1とS2が計算される。両方のシンドロームがゼロの場合、EDACプロセスが終了して、データには、何ら訂正はされない。
【0109】
そのシンドロームのうちの1つか両方がゼロではなく、少なくとも2つのシンボル相関値が16以下の場合には、消去プロセスが適用される。2つの誤りのシンボル(消去プロセスのために必要)の位置が、最も低いスコアを有するシンボルとして規定される。2つ以上のシンボルが同じ最小スコアを有すると、2つの最小スコアシンボルのランダムな選択が使用される。データセットが、消去プロセスによって訂正され、機能が呼び出し機能に戻る。
【0110】
S1とS2シンドロームが両方ともゼロではなく、少なくとも1つの相関値が16以下の場合には、単一のエラーEDACプロセスが適用される。11個のシンボルのデータセットは、そのプロセスによって訂正されて、機能は呼び出し機能に戻る。
【0111】
モード5のレベル1とレベル2のシンボルセットが、暗号コンピュータ60に報告されるが、その暗号コンピュータは、データを解読して、モード5のIFFが必要な戦術情報を返す。
【0112】
図13は、受信機22から出力された信号を示す。信号はプレアンブル情報とともに始まり、ATCで使用されるデータを提供する。図14は、図13の受信機出力信号によって出力されるプレアンブル位相相関器を示す。図15は、プレアンブル振幅圧縮信号を示す。
【0113】
図17は、図16に示される受信機出力信号に応じたプレアンブルトリガマークを示す。受信機出力は、2つのレベル1のプレアンブルを有している。そのプレアンブル相関器は、データが存在することを示す、図17に示すようなプレアンブルトリガマークを生成する。このデータは、144(図18、19)の相関値、つまりレベル1データとしての最大値を提供するウォルシュ相関器52によって処理される。その結果、データ決定ストローブ信号が生成されて、そのデータセットの妥当性を示している。
【0114】
図20は、プレアンブル閾値と、データ閾値によって設定された偽アラームレートデータを示している。プレアンブル閾値は、データ相関プロセスを稼動させる多くのプレアンブルトリガを制御して、一方で、データ閾値は、データが報告される対象のデータ相関スコアを設定する。図20は、プレアンブル閾値をパラメータとしたデータ閾値を設定する機能として、偽アラームの確率Pfaを示す。10−7Pfa設定(16MHzのレートにおいて毎秒16の偽レポート)において、レベル1の閾値設定は90であり、プレアンブル閾値は12である。
【0115】
図21は、検出確率Pdを示す。検出確率は、データ信号のノイズに対する比(S/N比)の関数である。2つのタイプの検出確率が考えられるが、1つは、プレアンブル決定Pddataに基づくデータの検出確率Pddataであり、もう1つは、正しく復号されたデータシンボルすべてを有する確率Pdcorrectである。データ閾値設定をパラメータとした信号対ノイズ比の関数としての、2つのレベル1の確率は、図21に示されている。図21のグラフのためのプレアンブル閾値設定は、12である。
【符号の説明】
【0116】
20 航空管制システム
22 デジタル受信機
24 信号スプリッタ
26 奇数チャンネル
28 偶数チャンネル
32 奇数チャンネルデータデコーダ
36 偶数チャンネルデータデコーダ
38 プレアンブル相関器
40、44 振幅相関器
42、46 位相相関器
48 プレアンブル決定論理回路
49 単パルスレーダ信号処理回路
52 ウォルシュデータ相関器システム
100 FIFO入力レジスタ
102 相関器
104 排他的ORゲートアレイ
110 加算器
120 第1のFIFOデータレジスタ
122 第2のFIFOデータレジスタ
124 排他的ORゲート
125 乗算器アレイ
126 コードマスクレジスタ
128 加算器
130 振幅読取器
132 奇数プレアンブルシンボル検出器
134 偶数プレアンブルシンボル検出器
138 プレアンブル検出器
140 検出プレアンブルデータ記憶装置
RSLS 応答経路サイドローブ抑制
【技術分野】
【0001】
本発明は一般的に、航空機のような対象物の位置を識別し判定するための二次監視レーダを使用する技術に関する。
【背景技術】
【0002】
二次監視レーダ(SSR:Secondary Surveillance Rader)は、航空管制(ATC:Air Traffic Control)において使用されるレーダシステムである。SSRは、航空機の位置を検出し測定するだけでなく、その航空機の識別や高度などの航空機からの付加的情報を要求する。一次レーダシステムは、ちょうど光ビームの中の対象物を見ることと同じような現象であるが、反射されたレーダ信号を検出することによって、対象物の範囲や方位のみを測定する。これに対してSSRは、符号化されたデータを含む応答を送信することによって、各々の呼掛信号に応答するレーダトランスポンダを搭載した対象物に対して返答する。SSRは、もともと第二次世界大戦中に開発された軍事的な敵味方識別(IFF:Identification Friend or Foe)技術に基づいており、この2つのシステムは今日でも依然、両立している。システムは進化して、「敵味方識別」(IFF)という言葉は、通常、民間と外国の航空機の使用を含めたSSR運用のすべてのモードについて言及するようになっている。
【0003】
SSRアンテナは、呼掛コールを送信し、航空機データを受信するために使用される。軍用、民間航空機は、二次監視レーダの呼掛からの信号に対して、識別コードと高度を基に自動的に応答するトランスポンダを有している。そのコードは、所定の呼掛信号に応答する所定のメッセージである。航空機が飛行を始める前に、その航空機は、航空管制官からトランスポンダコードを受け取る。通常、たった1つのコードが、全飛行に対して与えられる。これらのコードは、モードコードと呼ばれる場合がある。対象物までの範囲は、呼掛時間と応答時間の間の時間的な遅れから計算される。それ故に、SSRシステムは、友好的な航空機に、一次レーダが可能が提供出来るすべてのデータ、それ以上のデータを提供する。
【0004】
航空機搭載のトランスポンダは、全方位アンテナを有しており、あらゆる方向からのレーダ信号を受信、応答することが可能である。トランスポンダは、送信機からの信号を受信して、そのトランスポンダが設定されているモードで受信している呼掛信号に対してだけ、特定のパルスグループ(コード)で選択的に応答する。これらの返答は、対象物の「外板(skin)」での返送によって受信される一次レーダの返送信号とは独立している。SSR呼掛け器によって処理された表示のための返答は、「プロット」と呼ばれることがある。航空管制官が使用するレーダスコープは、一次レーダシステムと二次レーダシステムの両方からの返送を表示する。これらの返送は、航空管制の制御と切り離しにおいて管制官が参照にするものである。
【0005】
SSRで使用されるトランスポンダは、1つの周波数(1030MHz)で受信し、別の周波数(1090MHz)で送信する無線受信機と送信機である。このタイプのトランスポンダは、クロスバンドビーコンと呼ばれる。対象物の航空機のトランスポンダは、要求された情報を含む符号化応答信号を送信することによって、呼掛け器(通常は、しかし、必ずしも必要条件ではないが、一次レーダと共同設置された地上ステーション)からの信号に対して応答する。SSRは、アンテナが回転する間に、呼掛パルスを連続して送信するか、電子的に空間が走査される。送信された返答は、呼掛モードに依存している。その時、航空機は、計算された方位と範囲の、管制官のレーダスクリーンに、名称付きアイコンとして表示される。運用中のトランスポンダを有しない航空機は依然、一次レーダで観測され、SSR派生データの恩恵を受けない管制官に表示される。
【0006】
民生用SSRと軍事用IFFは両方とも、戦時中のそれらよりもはるかに複雑になってきているが、依然、両立している。この両立性の1つの理由は、軍用航空機の、民生用空域での運用を可能にすることである。現在、SSRははるかに詳細な情報を提供出来、衝突を避けるために、航空機間で直接、データ交換を可能にしている。味方を確実に認識するという第一の軍事的役割を考えるなら、IFFは、敵による「なりすまし(spoofing)」を防止するためのはるかに確実な(暗号化された)メッセージを有しており、空、海、及び地上車両を含むあらゆる種類の軍事的基盤で使用される。
【0007】
いくつかのトランスポンダモードがあるが、その各々は異なる情報を提供する。モード1は、2桁5ビットの任務コード(軍用に限る−コクピットで選択可能)を提供する。モード2は、4桁8進数の単位コード(軍用に限る−地上で設定するか、特定の航空機のタイプによって飛行中に変更される)。モード3/Aは、航空管制官(軍用及び民間)によって割り当てられるトランスポンダコードとして知られる、航空機のための4桁8進数識別コードである。モード4は、符号化された課題に対する3パルスの応答(軍用に限る)を提供する。モードB及びDは、もともと規定されているが、民間ATC目的のために使用されない。
【0008】
民間航空機の場合、運行モードは、A、C及びSである。モードSは、モードコードに加えて、他のデータの送信を含む軍用、民間航空管制のための比較的新しいIFF手順である。Aモードは、航空管制官によって割り当てられた0から7の数字を使用しており、識別とモニタリングを可能にするためにパイロットによって設定される4桁のコードに基づく。モードCは、航空機高度計によって自動的に読み取られる気圧高度を送信する。モードSは、モードSの呼掛によって動作して、呼掛信号によって要求される特定な情報を提供することが出来る。モードA及びCに関しては、呼掛信号を受信した航空機はすべて応答するが、モードSの場合は、航空機に対して個別に呼掛ることが出来る。現代のATCシステムでは、データは、レーダスクリーン上の航空機位置のシンボルに関連したタグやラベルの中の英数字で表わされる。
【0009】
モード5は、自動従属監視放送(ADS−B)とGPS位置(軍用に限る)の確実な送信を提供するために暗号化を提供する。モード5 IFFシステムは、他のモードが呼掛と応答に関する暗号化を可能にする以外の、呼掛け器とトランスポンダとの間のより洗練されたデータ交換を可能にする。送信シーケンスや応答シーケンスが長くなり、暗号技術が改良されれば、交信をモニタして暗号を破る可能性は非常に低くなる。
【0010】
トランスポンダのレベルは、重要な特徴である。そのレベルは、トランスポンダの能力を報告する。レベル1のトランスポンダは、基礎的監視能力を有するトランスポンダである。レベル1のトランスポンダは、データリンク能力や拡張メッセージの提供はない。レベル2のトランスポンダは、航空機衝突防止装置(ACAS)や、高度に関する地上ステーション要求や、機体認識のための地上ステーション要求に関する能力と共に、レベル1のトランスポンダの特徴をすべて有している。今日、設置されるほとんどのトランスポンダはレベル2の能力を有している。
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、受信レーダ信号の位相と振幅との相関関係を有する改良されたモード5の航空管制システムを提供する。
【課題を解決するための手段】
【0012】
航空機から発信されたプレアンブルとフライト情報を含むデジタルデータストリームを処理する本発明の航空管制システムは、航空機からのデジタルレーダ信号を受信するための受信機を具備する。受信機は、プレアンブルと位相信号出力を提供するように配置され、信号スプリッタは、奇数番号パルスの1組と、偶数番号パルスの1組とを送信するように配置された奇数チャンネルと、偶数チャンネルの間の受信機からの振幅と位相信号出力を分割するように配置されている。
【0013】
本発明は、更に、奇数チャンネルで符号化された信号を抽出して、奇数データストリームを形成するための信号スプリッタに接続された奇数チャンネルデータデコーダと、偶数チャンネルで符号化された信号からデータを抽出して、偶数データストリームを形成するための信号スプリッタに接続された偶数チャンネルデータデコーダとを備える。奇数と偶数データストリームと、規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出するための奇数と偶数チャンネルデコーダに接続されたプレアンブル相関器とを備え、プレアンブル決定論理回路は、プレアンブル相関器から出力された信号を処理して、妥当可能性あるプレアンブルのうちのどちらが実際に妥当であるか識別するために配置されている。
【0014】
本発明の航空管制システムは、信号スプリッタと、奇数チャンネルデータデコーダとの間の前記奇数チャンネルの中の奇数チャンネル差分位相検出器と、信号スプリッタと偶数チャンネルデータデコーダとの間の偶数チャンネルの中の偶数チャンネル差分位相検出器とを更に具備することが可能である。
【0015】
本発明の航空管制システムに含まれるプレアンブル相関器は、奇数チャンネル振幅を示す信号を受信するために信号スプリッタに接続された第1の入力と、復号された奇数信号を受信するために奇数チャンネルデータデコーダに接続された第2の入力とを有する奇数チャンネル振幅相関器であって、奇数振幅相関器合計信号を生成するように配置された奇数振幅相関器と、偶数チャンネル信号の位相を示す信号を受信するために偶数チャンネルデータデコーダに接続された偶数チャンネル位相相関器であって、偶数位相相関器合計信号を生成するように配置された偶数チャンネル相関器と、偶数チャンネル振幅を示す信号を受信するために、信号スプリッタに接続された第1の入力と、復号された偶数信号を受信するために、偶数チャンネルデータデコーダに接続された第2の入力とを有する偶数チャンネル振幅相関器であって、偶数振幅相関器合計信号を生成するために配置された偶数チャンネル振幅相関器と、偶数チャンネル信号の位相を示す信号を受信するために、偶数チャンネルデータデコーダに接続された偶数チャンネル位相相関器であって、偶数位相相関器合計信号を生成するために配置された偶数チャンネル位相相関器とを具備することが可能である。
【0016】
本発明の航空管制システムは、データストリーム中のサイドローブによって生成されたプレアンブルを抑制するため、及び単パルスレーダデータを生成するために、プレアンブル決定論理回路と、受信機に接続された応答経路サイドローブ抑制と、単パルスレーダ信号処理回路とを具備することが可能である。
【0017】
本発明の航空管制システムは、好ましくは、偶数と奇数チャンネルの中のデータを識別して、どちらのチャンネルが、更なる処理のために使用すべき最良のデータを有するのか判断するためのウォルシュデータ相関器システムを更に具備する。
【図面の簡単な説明】
【0018】
【図1】本発明のモード5検出システムのブロック図である。
【図2】図1のシステムに含まれる信号スプリッタのブロック図である。
【図3】図1に示されるように本発明に含むことが出来る差分位相検出器のブロック図である。
【図4】図1のシステムに含むことが出来るデータデコーダのブロック図である。
【図5】図1のシステムに含むことが出来る相関器チャンネルのブロック図である。
【図6】図1に示されるように本発明に含むことが出来るプリアンブル振幅圧縮システムのブロック図である。
【図7】図1のシステムに含むことが出来るプリアンブル決定論理回路システムのブロック図である。
【図8】図1のシステムに含むことが出来る応答サイドローブ抑制システムのブロック図である。
【図9】図1のシステムで使用可能な単パルス処理のブロック図である。
【図10】図1のシステムで使用可能なウォルシュデータ相関器とデータデコーダを示す。
【図11】図10のデータ相関器の部分のブロック図である。
【図12】図1のシステムで使用可能な消去、単一エラー検出、訂正プロセスのフロー図である。
【図13】図1のシステムに含むことが出来る外部受信機から出力される信号を図示している。
【図14】図5のプリアンブル位相相関器から出力される信号を図示している。
【図15】図6のプリアンブル圧縮システムから出力されて信号を図示している。
【図16】図1のシステムに含むことが可能な外部受信機から出力された信号を図示している。
【図17】プリアンブルトリガのマークを図示している。
【図18】図11のデータ相関器から出力された信号を図示している。
【図19】図11のウォルシュデータ相関器とデータデコーダにおけるデータ決定プロセスから派生したデータ決定信号を図示している。
【図20】様々なプリアンブル閾値のためのデータ相関器閾値の関数としての偽アラーム確率を図示している。
【図21】データ対ノイズ比の関数としての検出確率光検出器を図示している。
【発明を実施するための形態】
【0019】
図1を参照すると、本発明のモード5検出システム20は、当技術分野では公知のレーダトランスポンダ(図示せず)からのレーダ信号を受信するように配置された外部受信機22を備える。典型的には、トランスポンダは、航空機(図示せず)に搭載されている。
【0020】
モード5検出システム20は、次のインターフェースを含む。
1.振幅SUM
受信機出力振幅SUM信号は、32MHzのサンプリングレートにおいて16ビットまでの直線データを含んでいる。
2.位相SUM
受信機出力位相SUMデータは、32MHzレートにおいて直線位相分布の8ビットを含んでいる。
3.振幅OMNI
受信機出力振幅OMNI信号は、32MHzサンプリングレートにおいて、16ビットまでの直線データを含んでいる。
4.振幅DIFF
受信機出力位相DIFFデータは、32MHzレートで16ビットまでの直線データを含んでいる。
5.位相DIFF
受信機出力位相SUMデータは、32MHzレートで、8ビットの直線位相分布を含んでいる。
【0021】
モード5検出システム20は、2つの閾値設定、つまり、内部データテスト偽アラームレートを調整するプレアンブル閾値と、レベル1とレベル2のための最終データ偽アラームレートを設定するレベル1とレベル2データ閾値を含んでいる。
閾値設定は、
1.プレアンブル閾値
プレアンブル閾値は、プレアンブルスタートのための閾値を設定するステップ2の8から16までの値。12(デフォルト設定)を設定する時、レベル1プレアンブル偽アラームレートは、約5000である。
2.データ閾値レベル1
データ閾値レベル1は、最終データの偽アラームレートを制御する。閾値設定レベル1の90と、プレアンブル閾値設定12の場合、データ偽アラーム確率は、毎秒約8×10−3または1.28偽アラームである。
3.データ閾値レベル2
データ閾値レベル2は、最終データ偽アラームレートを制御する。閾値設定レベル2の160と、プレアンブル閾値設定の12の場合、データ偽アラーム確率は、毎秒約4×10−8または0.6偽アラームである。
【0022】
モード5検出システム20は次の制御を含む。
1.位相オフセット
これは、システムによって0あるいは180度に集中していると報告されたデルタ位相をオフセットするシステムから報告された位相訂正信号である。
2.交信セキュリティ(COMSEC:Communications Security)スタガー(stagger)インデックスレベル1
このインデックスは、呼掛毎に設定されるプレアンブルスタガーインデックス1によって決定され、レベル1スタガーテーブル150から、レベル1プレアンブルスタガーを選択するときに使用する。この呼掛時間に検出されたすべての合法的対象物は、このスタガーを使用して、システムが他の呼掛け器からのトランスポンダ報告を拒否することを可能にする。
3.COMSECスタガーインデックスレベル2
このインデックスは、システムによってコード検証インターバル(CVI)毎に設定される、プレアンブルスタガーインデックスレベル2によって決定される。CVI時間中に検出されたすべての対象物は、P3、P2及びP1パルスのためのこのスタガー時間を使用する。CVI時間は、呼掛け器とトランスポンダによって、独立して変更されるので、検出器は、プレアンブル検出のために、過去及び未来のCVIを評価しなければならない。従って、現在、過去、未来のインデックスは記憶されなければならない。
4.COMSEC拡散インデックスレベル1
このインデックスは、呼掛時間毎に設定される拡散機能インデックスによって決定され、この呼掛中に受信したすべてのレベル1レポートのためのユニークなデータ拡散を提供する。拡散機能は、検出器に記憶された256の拡散機能のテーブルから抽出される。
5.COMSEC拡散インデックスレベル2
このインデックスは、CVI時間毎に設定される拡散機能インデックスによって決定され、このCVI中に受信されたすべてのレベル2のレポートのためのユニークなデータ拡散を提供する。拡散機能は、検出器に記憶された256の拡散機能のテーブルから抽出される。しかし、CVIは、トランスポンダと呼掛け器において独立して変更されるので、返答が、以前の、あるいは次のCVIを使用するということが起こり得る。すべての可能なCVIを検索するプレアンブル検出は、正しいインデックスを選択して、どのCVIを現在の対象物のために使用するべきか識別する。従って、現在、過去、未来のインデックスは、いつでも使用出来るように記憶されていなければならない。
6.レベル1データあるいはID
これは、どのタイプのレベル1の応答を期待されているか、つまりデータなのかIDなのかを検出器に教えるインジケータである。
7.RSLSK
メインビーム又はサイドローブから派生したと報告されるべき対象物のための応答経路サイドローブ抑制(RSLS:Reply path side lobe suppression)の閾値設定である。
【0023】
モード5検出システム20は、次のデータを提供する。
1.オーバレイコード
オーバレイコードは、レベル1呼掛時間毎に受信され、データを暗号化したり復号化するために使用される暗号化コンピュータ(図示せず)から受信された時、レベル1の9ビットデータシンボルを解読するために使用される。
2.暗号化コンピュータに対するデータ
エラー検出及び訂正(EDAC:Error Detection And Correction)に続くレベルとレベル2データは、データスクランブル解析のためにCRYPTOに報告される。復号化されたデータは暗号コンピュータから受信される。
3.レポートは、方位角とフラッグを含むモード5データを有するモード5メッセージレポートである。
【0024】
受信機22は、レーダ信号の位相と振幅を示す32MHzベースバンドデータを信号スプリッタ24に入力する。図13は、外部受信機から出力された典型的な信号を図示している。信号はプレアンブルとして知られている第一部分と、データセットを含む第二部分を有している。信号スプリッタ24は、32MHzサンプルデータを、それぞれ「奇数」と「偶数」と指定された2つの16MHzデータセットに分割して、そのデータは、別々のチャンネル26、28で処理される。
【0025】
信号位相遷移に対する32MHzサンプルのランダム位置によって、各々の検出シークエンス(プリアンブルとデータセットの検出)中に、チャンネル26又は28が、他のチャンネルよりもより良い検出可能性を提供することが出来る。これは位相遷移中に最も注目すべきことである。位相変化に対して開始サンプリングポイントによっては、分割処理チャンネル26または28の出力の1つは、その他のチャンネルが最大位相変化を持つ時、ある位相遷移において、まったく位相変化を報告しない可能性がある。どのチャンネルが、各々のデータセットのために使用される最良のチャンネルであるのか識別するために、システム20は、各々のセットのためのデータ相関スコアを決定するために奇数と偶数サンプルを処理する。チャンネル26と28の両方の相関プロセスを応用することによって、信号入力のための最良のチャンネルが、検出プロセスのために選択される。最良のチャンネルの最終選択は、最高のデータ相関スコアが使用出来るプロセスの終わりまで延期される。
【0026】
奇数チャンネル26は、信号スプリッタ24からのデータを受ける差分位相検出器30を含んでいる。差分位相検出器30から出力された信号は、データデコーダ32に入力される。チャンネル28は、信号スプリッタ24からのデータを受ける差分位相検出器34を含んでいる。差分位相検出器34から出力される信号は、データデコーダ36に入力される。差分位相検出器34とデータデコーダ36は、好ましくは、それぞれ、差分位相検出器30とデータデコーダ32と同一に形成される。
【0027】
差分位相検出器30、34は、チャンネル当たり16MHzで、偶数と奇数サンプルデータを処理して、そのデータの中のマークとスペース値を検出する。理想的には、連続チップの間の位相差は、±90°であると期待される。しかし、ノイズと内部シンボル干渉(ISI:Inter Symbol Interface)によって、期待される実際の位相差は、最大90度以下の任意のΔθである。位相差がプラスの場合には、スペース(1)が宣言される。マイナス方位角の値が、マーク(0)として報告される。
【0028】
位相検出器30、34の出力は、符号化されたトランスポンダデータセットを抽出するために、差分データデコーダ32、36によって処理される。それは、各々新しいチップサンプルkは、新たなチップサンプルと過去の出力チップの排他的OR(XOR)である遅延を使用して実行される。このプロセスは、オリジナルコードまたはそのオリジナルコードの逆数を生成する(任意の「1」または「0」である第一ビットの値によって決まる)。
【0029】
データデコーダ32、36から出力された信号が、プレアンブル相関器38に入力される。プレアンブル相関器38は、奇数振幅相関器40と、奇数位相相関器42を含んでいる。プレアンブル相関器38はまた、偶数振幅相関器44と、偶数位相相関器46を含んでいる。データデコーダ32から出力された信号は、奇数振幅相関器40と、奇数位相相関器42に入力される。奇数振幅相関器40は、信号スプリッタ24からの振幅SUM奇数信号を受信する。データデコーダ36から出力された信号は、偶数振幅相関器44と、偶数位相相関器46に入力される。偶数振幅相関器44もまた、信号スプリッタ24からの振幅SUM偶数信号を受信する。プレアンブル相関器38は、受信データを処理して、マイナスまたはプラスであるレベル1とレベル2のプレアンブルパルスを検出する。データデコーダ32、36は、コードまたはそのコードの逆数を生成するので、相関関係の絶対値が、規定閾値を超える時に、成功した相関関係が宣言される。
【0030】
奇数振幅相関器40、奇数位相相関器42、偶数振幅相関器44及び偶数位相相関器46から出力された信号は、プレアンブル決定論理回路48に入力する。プレアンブル決定論理回路48も、プレアンブル閾値信号と、レベル1、2のためのプレアンブルスタガー時間を示す信号を受信する。プレアンブル相関器38の出力は、適切なプレアンブル検出のためのプレアンブル相関器出力を評価するプレアンブル決定論理回路48によって処理される。そのために、レベル1とレベル2のための現在プレアンブル時間スタガーは、現在の期待されるスタガー位置を識別する。スタガー値は、レベル1とレベル2のスタガー時間値のためのすべてのプレアンブルデータを記憶するローカルテーブルから抽出する。プレアンブル相関レベルが設定閾値以上の時、プレアンブル空間が、期待されたスタガー時間に合致する場合、プレアンブルセットを検出する。そのセットが2つのプレアンブル検出のレベル1の要件と合致するか、レベル2のスペース要件に合致する4つのプレアンブルのうちの少なくとも3つが検出された場合、データセットスタートT0が宣言される。レベル2のスタガー時間が、コード検証インターバル(CVI:Code Validation Interval)毎に変化するので、現在CVI、過去CVI及び次に期待されるCVIのために、レベル2のスタガーテストが行われる。レベル2プレアンブルテストの結果は、トランスポンダによってどのCVIが現在、使われているのか識別する(レベル1のプレアンブルスタガーは、呼掛毎に、呼掛け器によって開始されるので、よく知られている)。
【0031】
プレアンブル相関器38は、入力データストリームと、所定のプレアンブルマスクとの相関を取り、可能性のあるプレアンブルを検出する。奇数と偶数チャンネルに関して独立して処理が行われて、これらのチャンネルのいずれかでプレアンブルを検出された場合、成功を宣言する。相関機能は2つの処理を含み、位相のみの相関関係と、位相振幅の相関関係であり、その2つは統合されてプレアンブル決定出力を生成する。
【0032】
位相のみの相関器42、46は、差分位相検出器データに関する相関を行い、安定した波長独立定数の偽アラームレート(CFAR:Constant False Alarm Rate)を提供する。それは、システムが、データ検出プロセスを起動するために使用可能な信頼性のあるプレアンブルトリガを生成することを可能にする。位相相関器42、46によって達成されたCFARプロセスは、振幅リミッタがCFARプロセスにおいて実施されるかのように、あらゆるノイズレベルで、一定の偽アラームレートを保持する。しかし、位相のみの相関プロセスは、RSLSとレベル1の単パルスプロセスで必要な振幅データをまったく有していない。
【0033】
位相相関は、振幅依存「圧縮」信号を生成するために差分位相検出器データと振幅データを使用する。それは、信頼出来るRSLSと単パルス機能のために必要な完全16チップ処理ゲイン(PG:Processed Gain)振幅データを提供する。振幅信号は、CFARプロセスのためにも使用可能であるが、CFARのために振幅依存信号を有することは、ノイズ、ジャミング及び干渉のために調整が必要なノイズ振幅推定器が必要である。位相相関器42、46は、プレアンブル検出が宣言された時にのみ、プレアンブルの検出や、位相振幅チャネルを記録するために使用される。
【0034】
プレアンブル決定ロジック回路48は、奇数と偶数SUMチャンネル26、28の出力を、応答経路サイドローブ抑制(RSLS)と、OMNIとDIFFレーダ振幅信号を受信する単パルス回路49に送る。SUMチップセットとプレアンブルの公知の固定コードを使用して、OMNI、DIFFプレアンブル信号は圧縮されて、相関されたプロセスゲイン(PG)信号は、単パルスとRSLS機能にとって利用可能である。第一に、RSLSテストが達成される。プレアンブルがRSLSテストに失敗した場合、プレアンブルはそのシステムから消去される。十分な数のプレアンブルが拒否された場合、このプレアンブルに関係するデータセットは無視される。
【0035】
単パルスデータは、レベル1とレベル2のOMNI、DIFFの圧縮信号から抽出される。対象物位置はレベル2レポートの一部分だから、レベル2の単パルスは必要ない可能性がある。しかし、レベル2単パルスは、可能性ある将来の使用のために抽出される。RSLSテストを通過した各々のプレアンブルのために、単パルスデータは、RSLSと単パルス処理機能49によって計算される。ロガリスムDIFFを引いたロガリスムSUM、ビーム側信号と、このビーム側に関係したデルタ位相を含むデータセットは、プレアンブル決定論理回路に戻されてそこに記憶される。プレアンブル決定論理回路48が、レベル1またはレベル2のプレアンブルを識別した時、最終的な単パルスデータは、適切な平均処理とロジック選択処理を使用して、各々のプレアンブルに記憶された個々の単パルスから計算する。この単パルスデータは、データセットによって報告される。RSLSと単パルス回路49はまた、RSLS禁止信号とデルタ位相信号を、プレアンブル決定ロジック回路48に提供する。
【0036】
プレアンブル決定ロジック回路48も、データ選択ロジック回路50とウォルシュ相関器システム52に信号を提供する。データ選択ロジック50は、必要な遅延を提供し、ウォルシュデータ相関器52をスタートするためのタイミングを設定する。
【0037】
ウォルシュ相関器システム52は、レジスタ54と、データ決定回路56と、エラー検出/訂正回路(EDAC)58を含んでいる。レジスタ54は、奇数データ信号と、偶数データ信号を出力する。奇数データ信号は、レジスタ54と、データ決定回路56の間に接続される第一のウォルシュデータ相関器セット60に入力する。偶数データ信号は、レジスタ54とデータ決定回路56の間に接続される第2のウォルシュデータ相関器セット62に入力される。第1及び第2のウォルシュデータ相関器セット60、62は、好ましくは、16個の相関器を含んでいる。データ選択ロジック回路50は、ウォルシュ相関器システム52の中のレジスタ54に入力する。データ決定回路56も、データインジケータとデータ閾値信号を受信する。各々の相関器は、16個の可能性あるデータシンボルのうちの1つを識別するために使用する適当なウォルシュ機能を含む。データの開始を示すT0パルスでマークされた入力データセットは、最初は、拡散機能リストからの拡散機能を使用して、シンボル毎に収束する。レベル1に関しては、拡散機能は、システムから受信したCOMSEC拡散インデックスによって提供された機能である。どの拡散インデックスが、現在のデータセットのために使用されるのか示しているプレアンブル検出から報告されたCVIによって、レベル2の拡散インデックスが選択される。
【0038】
各々のデータシンボルは、現在、すべての16個のウォルシュ相関器で相関を取り、最も高い相関値が、その特定のシンボルに記憶された4データビットを識別する。すべてのシンボルと、奇数と偶数機能と、現在のT0マークからのプラス、マイナスのワンチップスタートのために繰り返される。6個すべてのデータセット、相関合計、各々のシンボルのための関係する相関値は、ローカルメモリに記憶される。すべてのシンボルを相関させるとすぐ、最良のセットは、最も高い相関合計を有するセットと識別される。相関合計が、システムによって設定されるデータ閾値レベル以上である時に、そのデータを認めるデータ決定機能によって、最終的なデータ検出決定が行われる。それが認められた場合、このデータセットが、EDAC機能に対して有用になる。
【0039】
EDACプロセス58は、レベル2のデータセットでのみ実施される。レベル2のレポートが識別されて、データセットが、レベル2のデータ閾値テストに合格すれば、一度に11個のシンボルのグループが、EDACプロセス58に送られる。EDACプロセス58は、データセットを評価して、このデータが、単一のエラー訂正か、二重のエラー訂正(消去プロセス)か、またはどちらも必要としないかを判断する。エラーが検出された場合、EDACプロセス58は、エラーを訂正して、その訂正した値で、11個のシンボルデータにオーバーライトする。このプロセスは、11個のシンボル毎の3つのセットすべてに繰り返される。訂正されたデータは、現在、正しい暗号解読のために、暗号コンピュータ64に報告される。
【0040】
図1のモード5検出システム20の構成要素のための適切な構造を、図2〜13を参照にして述べる。
【0041】
[信号スプリッタ24]
図2を参照すると、信号スプリッタ24は、外部受信機22からの16ビット振幅信号と、8ビット位相信号を受信するために配置されたデータデバイダ64を含む。データデバイダ64も32MHzクロック信号を受信する。データデバイダ64は、奇数チャンネルのための16ビット奇数振幅データと8ビット奇数位相データを生成して、偶数チャンネル28のための16ビット偶数振幅データと、8ビット位相データを生成するために入力振幅データ、位相データを処理する。データデバイダ64も、32MHzクロック信号入力を、奇数チャンネル26と偶数チャンネル28のための16MHzクロック信号に分割する。
【0042】
出力バッファ66は、奇数振幅信号、奇数位相信号、及びデータデバイダ64からの16MHzクロック信号のうちの1つを受信する。好ましくは出力バッファ66と同一である出力バッファ68は、偶数振幅信号と、偶数位相信号と、データデバイダ64からのその他の16MHzクロック信号を受信する。出力バッファ66、68の各々は、対応する有効なクロックが設定された時、有効データを維持する。
【0043】
[差分位相検出器(Differential Phase Detector)30、34]
図3を参照すると、差分位相検出器30は、奇数チャンネル26のためにマークとスペース信号を生成する。差分位相検出器34は、好ましくは、差分位相検出器30と同一であるように形成されると理解されるべきである。従って、差分位相検出器30のみを、ここで詳細に述べる。出力バッファ66から出力された8ビット位相信号は、位相コンバータ70に入力される。位相コンバータ70の出力は、信号を、時間τ遅延させる遅延回路72に入力される。遅延回路72の出力と、位相コンバータ70の出力は、その2つの信号入力を合計するデコーダ74に入力される。デコーダ74出力は、閾値回路76に入力される。
【0044】
0°乃至360°で、スプリッタ24によって報告される各々の新しい入力チップ位相は、±180°に変換される。このチップ位相は、遅延時間τ=62.5nsに対応する1/16MHzの1チップ時間、遅延する。デコーダ74は、完全360°の範囲における位相の連続性を保ちつつ、新しい入力チップ位相から過去のチップ位相を減算し、マイナス又はプラスの可能性の差異のサインを発見する。この位相のサインの推移は、マークとスペース信号を生成するために使用される。ワンチップ時間の間、信号はプラス方向(スペース)又はマイナス方向(マーク)に90度、「移動」するので、プラス又はマイナスのサインを、明らかに抽出することが出来る。
【0045】
差分位相検出器30、34は、チャンネル当たり16MHzで奇数と偶数のサンプルデータを処理して、マークとスペース値を検出する。理想的には、連続するチップの間の位相の差異は、±90度である。しかし、ノイズと内部シンボル干渉(ISI)によって、期待される異なる実際の位相は、最大90度より小さい可能性のある任意の値Δθである。位相差がプラスの場合、スペース(1)が宣言される。マイナスの方位角値は、マーク(0)として報告される。
【0046】
位相検出器出力SKのために構成された位相検出器論理式は、次のように表現出来る。
±180度への変換
もし(方位角[k]>180°)ならば、
方位角[k]=方位角[k]−360°
位相の連続性を保持するためには、位相差デコーダは、±180度で作動し、次の機能を達成しなければならない。
DeltaAz[k]=方位角[k]−方位角[k−1]
もし(DeltaAz[k]>180°)ならば、
DeltaAz[k]=DeltaAz[k]−360°
もし(DeltaAz[k]<−180°)ならば、
DeltaAz[k]=DeltaAz[k]+360°
位相検出器出力は、次によって与えられる。
もし(DeltaAz[k]>=0)
PhaseDetOut[k]=1
その他、
PhaseDetOut[k]=0
【0047】
[データデコーダ32、36]
データデコーダ32、36は、差分位相検出器30、34によるスペースとマーク信号出力によって稼動して、航空機のトランスポンダの中の差分データエンコーダ(図示せず)によって符号化されたオリジナルデータを抽出する。図4を参照すると、データデコーダ32は、スペース=1、マーク=0を示す信号Vin(k)を受信する排他的OR(XOR)ゲート80を含んでいる。排他的ORとは、もしもの場合と演算子の1つが真(true)値を有する場合に限り、真の論理値になる2つの演算子に関する論理演算である。サンプルkの出力は、過去の出力を有した入力のXORである。XORゲート80は、遅延回路82に入力される信号Vout(k)である。遅延回路82は、入力Vin(k)と組み合わせるために、XORゲート80の入力にフィードバックする信号Vout(k–1)を生成する。データデコーダ32の論理機能は、
【数1】
である。
出力機能は、復号されたデータである。第一のデータチップ以前のチップの任意の「0」か「1」の性質のために、デコーダ32は、オリジナルデータ、又はオリジナルデータの逆数を生成することが出来る。その結果、プレアンブルとデータに対するサーチ処理は、データまたはその逆数との相関を探す必要がある。
【0048】
[プレアンブル位相相関プロセス]
図5はプレアンブル位相相関プロセスの1つのチャンネルを示す。プレアンブル位相相関プロセスは、データデコーダ出力と、ノイズからプレアンブルを抽出するための規定のマスクを使用する。図14は、プレアンブル位相相関器から出力された信号を図示する。データデコーダ0/1データビットは、16ビット長のFIFOレジスタに記憶され、相関器102に記憶された0111 1000 1000 1001などのプリセットコードとクロスで相関させる。排他的ORゲートアレイ104は、FIFOレジスタ100と相関器102の間に接続されている。排他的ORアレイ104は、加算器110に接続された出力を有する。相関機能は、本質的に、乗算と加算プロセスであって、そこで、各々のデータチップセルが、コードと比較され、その結果は、データセルが一致する場合には、プラス1(+1)に設定され、データが異なる場合には、マイナス1(−1)に設定される。相関結果は、すべてのセルの結果の合計である。加算器110からの信号出力Vout(K)は、次のように書くことが出来る。
【数2】
ただし、
VDATA(i)=データレジスタ中の各々のセルに記憶された位相データ(1/0)
VCODE(i)=各々のセルに、ダイレクト又は逆数コードレジスタに記憶されたコードデータ(1/0)
XOR’=コードとセル中のデータが一致した場合には、出力は+1で、一致しない場合には、−1である改良されたXOR機能
である。
【0049】
正確な一致のための相関器出力は、入力信号と相関器コードが等しい場合には、プラス値の16であり、データが、データデコーダ32又は36の1つによって逆数にされた場合には、−16である。それ故に、両方の状態を検出するために、プラスとマイナスの値のためのテストを行う必要がある。
【0050】
位相相関器は、振幅に対して独立しており、すべてのノイズ振幅レベルにおいて、同様の偽アラームレートを保持して、正しい閾値を与えることによって、プレアンブルの決定を行うことが出来る。計算され、測定されたプレアンブル偽アラームレートと、閾値の設定とS/Nの関数としてのプレアンブル検出の確率は、以下に与えられる。
【0051】
[プレアンブル位相相関偽アラームと検出確率]
信号がプレアンブル相関器38に与えられる場合、相関機能が、上記の相関機能を使用して、プレアンブルコードを発見しようと試みる。相関が成功であると宣言した閾値は、ここで計算された必要な偽アラームレートの機能である。
【0052】
n試行のうちのk回の成功した相関の二項確率P(k)は次の式で与えられる。
【数3】
ただし、p=単一チップの検出確率
【0053】
ノイズの場合、pは、相関器に記憶された「0」又は「1」のチップを得る確率である。ノイズの場合、p=0.5である。信号の場合、pは正しいチップを有する確率であり、信号対ノイズ比と、内部シンボル干渉(ISI:Inter Symbol Interference)の関数である。
【0054】
n=16チップの単一シンボルの場合と、少なくともK個のチップに関して、成功の相関が達成された場合には、相関確率は、Kからn(チップの数)の確率の累積確率である。
【数4】
各々のプレアンブルテストは2つの平行なチャンネル(偶数と奇数)に関して行われ、少なくとも1つのチャンネルが検出された時、成功のプレアンブル検出が宣言されるので、プレアンブルのシンボルを検出する確率は、
【数5】
である。
【0055】
シンボルセットの検出が成功すると、成功した検出が公表される。レベル1は次のことを要求する。P2シンボルが検出された場合、CVI、CVI+1及びCVI−1で規定される3つの位置のうちの少なくとも1つと、期待されるセルと、現在のセルk、セルk−1とセルk+1(単一セルの位置変化のための防止のために)のうちの少なくとも1つにおいて、P1シンボルを検出しなければならない。従って、P1は、9個の可能性ある位置でテストされる。
【数6】
レベル1の検出確率は、次のように与えられる。
【数7】
Kの設定は、システムの偽アラームレートを規定する。16個の正しい相関関係のうちのK(K個が一致して、16−Kが一致しない)に関して、相関器出力がK−(16−K)になる。
【0056】
K=14(16チップのうちの14が一致するか、相関器閾値が12に設定される)の場合、ノイズ偽アラームPは、シミュレータで、0.000323として測定され、その値は、16MHzサンプリングレートの場合には、毎秒約5100偽レポートと同等である。Kが15に選択される場合には、測定偽アラーム確率は、6.6×10−6であり、その偽アラームレートは、毎秒約105に減少させられる。
【0057】
4個のプレアンブルのうちの3個が成功裏に検出された場合に、検出が宣言される場合を除いて、レベル2のプレアンブルの検出プロセスは、レベル1のプロセスと同等である。従って、検出確率は、第一のプレアンブルとその他3つのプレアンブルのうちの2つを検出する確率と、第一のプレアンブルとその他の3つのプレアンブルのうちの3つを検出する確率と、第一のプレアンブルを検出しないで、第二のプレアンブルと最後の2つのプレアンブルを検出する確率の合計である。第一のプレアンブルを検出する確率はPS1であり、その他のプレアンブルはPS2(テストされた3CVI位置と、期待されたセルのプラス、マイナスを反映して)であるから、確率Pは、
【数8】
である。
この方法は、プレアンブルに対して、特別な選別は何も行わず、すべての異なるCVIからのレポートは、検出プロセスの開始にとって相応しいと仮定している。
【0058】
モード5検出プロセスは、受信機のベースバンドデータを受信して、プレアンブルと、レベル1とレベル2の検出のためのデータシンボルを抽出する。モード5の最小シフトキー(MSK:Minimum Shift Key)変調(良く知られた技術)によって規定された16MHzチップレートにおいて検出が行われ、それは、すべてのノイズ状態における一定の偽アラームレート(CFAR:Constant false Alarm Rate)を保持するためのセットの閾値を使用する。信号が一旦、プレアンブル閾値を越えると、検出器は、レベル1とレベル2のプレアンブル設定で規定されるすべてのその他の位置に存在する可能性あるプレアンブルのためのデータを評価するサーチ機能を使用する。プレアンブルが検出されて、このプレアンブルに続くデータが処理される。そして、それがデータ閾値を通過すると、データが抽出されて、システムに報告される。レベル1とレベル2のプレアンブル検出確率は、S/NとK設定の関数である。
【0059】
[プレアンブル位相振幅相関(振幅圧縮)]
位相振幅相関は、公知の相関コードを使用してプレアンブルデータを圧縮することによって処理ゲインを保持する整合フィルタとして考えることが出来る。そのプロセスは、図6に示されている。図15は、プレアンブルの振幅の圧縮を図示している。
【0060】
位相振幅相関(振幅圧縮)は、振幅データ処理を加えた位相相関関係と似ている。正しい運用のためには、振幅データは、必要な動的範囲をサポートするために十分な数のビットと直線的な関係でなければならない。相関プロセスにおける相関器合計によって使用される各々のチップのサインを確立するために、相関プロセスは、位相データを使用する。
【0061】
圧縮されるべき位相データと振幅データは、それぞれFIFOレジスタ120、122に入力される。XORゲート124のアレイはFIFOレジスタ120のデータを比較し、レジスタ126に記憶されたプレアンブルコードマスクと比較する。乗算器アレイ125は、コードマスクレジスタ126の出力と、FIFOレジスタ122の対応ビットとの積を形成して、その結果を、信号Vout1(k)を生成する16ビット加算器128に提供する。
【0062】
各々のデータチップkを位相と、振幅φkとVkで表す。増分時間kの位相振幅相関プロセスは、時間kに先行する16チップのコヒーレント合計(Voutk)のためのXOR’機能によって実行される。
【数9】
サイン値はXOR’機能によって、下記のように計算される。
【数10】
i=0乃至15
ただし、
φk−i=kから始まり、16チップ戻ったデータレジスタの中の各々のセルに記憶された位相データ(1/0)
VCODE(i)=各々のコードレジスタセル(プレアンブルコード)に記憶されたコードデータ(1/0)
XOR’=セル中のコードとデータが一致する場合は、出力が+1であり、一致しない場合には、−1である改良されたXOR機能
である。
【0063】
この相関プロセスの結果は、相関機能によって提供されるように、処理ゲインを有した、プレアンブル一致フィルタの「圧縮」信号振幅である。全くロスのないコヒーレントな処理を仮定すると、その理論的処理ゲインの限界は12dBである。
【0064】
同様な処理は、OMNI及びDIFFチャンネルにおいて実行される。SUM位相チップと固定プレアンブルコードは、圧縮コードを生成するが、この圧縮コードは、OMNIとDIFF振幅信号に加えられる時、RSLSと単パルスに必要なPG振幅データを提供する。
【0065】
[プレアンブル決定論理回路48]
図7に示したプレアンブル決定論理回路は、プレアンブル検出と単パルスの計算に対する補助の2つの主要動作を提供する。偶数振幅相関器116からの振幅偶数合計と、奇数振幅相関器117からの振幅奇数合計は、振幅リーダ130に入力される。奇数位相相関器42からの位相奇数合計が、プレアンブルシンボル検出器132に入力され、偶数位相相関器46からの位相偶数合計は、プレアンブルシンボル検出器134に入力される。プレアンブルシンボル検出器132、134は両方とも、プレアンブル閾値信号を受信して、単一プレアンブル検出器138に出力信号を提供する。
【0066】
位相奇数合計信号と位相偶数合計信号も、検出されたプレアンブルデータ記憶装置140に入力される。検出プレアンブルデータ記憶装置140は、相関器40、42、44及び46によって提供される奇数、偶数SUM位相と振幅の相関データを受信して、可能性のあるプレアンブル検出のためのデータを評価する。新しいプレアンブルシンボルが検出されると、その機能は可能性のあるその他のプレアンブルをサーチして、プレアンブルのスペースと入力データタイプに基づいて、レベル1又はレベル2と識別する。この情報は、奇数と偶数チャンネル26、28のデータ解読処理を開始させるT0トリガ信号を生成するために使われる。
【0067】
プレアンブル決定論理回路48は、RSLSと単パルス計算を終了する。新しいプレアンブルが検出されると、このプレアンブルのために、RSLS禁止パルス、単パルス信号、DV及びビームサイド情報を返信するRSLSと単パルス機能49に報告する。このデータは、最終的なプレアンブル単パルス評価のために使用される。
【0068】
相関させた奇数と偶数位相と、振幅データストリームに含まれる相関器38から出力された位相と振幅SUM信号は、可能なプレアンブル検出のためにここで評価される。そのために、現在の位相と相関させた奇数と偶数入力(絶対値)は、それぞれプレアンブルシンボル検出138によってテストされる。少なくとも、それらのうちの1つが閾値を越えた場合には、プレアンブルが検出されたストローブ信号が生成される。このストローブ信号は、一連の事象を稼動させる。まず第1に、それは、プレアンブル検出時より前に、チップ振幅サンプルの平均を取り、現在のプレアンブルの振幅を計算する平均136機能を稼動する。次に、それは、検出されたプレアンブルデータの記憶装置140に記憶された他のプレアンブル処理142に対するサーチを開始して、レベル1とレベル2の検出を決定する。次に、振幅相関器プロセスから受信した相関した奇数と偶数SUM振幅を記録して、RSLSと単パルス49に報告して、そのRSLSと単パルス49では、現在のプレアンブルと関係するプレアンブルRSLS禁止ストローブ信号と単パルスデータを計算する。
【0069】
最後に、将来の使用のために、検出されたプレアンブルデータ記憶装置140の中の現在のプレアンブルに関係したすべてのデータを記憶する。プレアンブル検出ストローブ信号は、奇数又は偶数チャンネルが、このプレアンブルシンボルのために使用されるかどうかを示す1あるいは2である。
【0070】
平均機能136は、時間的に戻ってNチップ(デフォルト値N=8)をサーチして、奇数と偶数チャンネルのために、現在の検出されたプレアンブルの平均レベルを計算する。このデータは、プレアンブル検出セットの最終検証のために必要である。
【0071】
過去のプレアンブルの論理回路142に対するプレアンブルサーチは、レベル1のP1プレアンブルと、レベル2検出のためのP3、P2及びP1を時間的に遡って捜すことによって、他の可能性あるプレアンブルをサーチする。そのために、最大のCVIを含む最大信号長に対して等しいか、それ以上である最小長の遅延線を実行する必要がある。この時間は、少なくとも28μsecであるトータル遅延時間に対して、26.625μsecプラス、S1の最大値、2.875μsecであるレベル2の信号長によって設定される。
【0072】
現在位置からサーチする場合、レベル1のP2プレアンブルとレベル2のP3、P2及びP1プレアンブルのすべての組合せが評価されなければならない。プレアンブルサーチは、CVI、CVI−1、CVI+1ずらして(スタガー)設定された、予定のプレアンブル位置に対して実施して、そのサーチは、レベル1とレベル2プレアンブルが存在するかどうかを評価することである(新しいプレアンブルは、レベル1とレベル2の両方の妥当な解決を有することになり、その中の一番可能性ある解決だけが真である)。可能性あるサンプルエラーをオフセットするために、そのサーチは、現在のセルと、現在のセルからプラスとマイナスしたセルに対して行われなければならない。サーチは、奇数と偶数チャンネルに対して独立して行われる。どれかのサーチで、決定が成功した場合、可能性あるデータを示す、T0位置のデータストローブ信号が報告される。奇数と偶数の二重チャンネルによって、同じ対象物が2度マークされ、チップ長の半分でオフセットされる可能性があることを知っておく必要がある。その2つの報告を1つにまとめるために、適切なアルゴリズムが後に提供される。
【0073】
レベル1のサーチロジックは以下の通りである。
相関器によってマークした時間より前に、8つのデータセルの平均を取って、現在のプレアンブルの振幅を記録する。
新しいプレアンブルから出発して、時間的に後ろにサーチする。
3つのCVI(CVI、CVI−1、CVI+1)のスタガー時間をループ化する。
現在のスタガー時間と、その3つの位置は、Tstart−1、Tstart及びTstart+1。
プレアンブルが記憶され、RSLS禁止ビットによってマークされていない場合、記憶されたプレアンブルの平均振幅を読み取る。振幅が、現在のプレアンブルの3dB以内にある場合、レベル1の検出が宣言される。T0(D1エンド)位置を計算して、単パルスデータを計算する。
【0074】
P1が起こる可能性のある場所の位置、つまり、P2、kに対するiStartは、次の式から計算される。
i=k−(3.0+S1)/0.0625)−1
S1は、CVI、CVI−1及びCVI+1によって報告されたスタガー位置
【0075】
[レベル2サーチ]
相関器によってマークされた時間以前に、8個のデータセルに関して平均を取ることによって、現在のプレアンブルの振幅を記録する。
新しいプレアンブルから出発して、時間的にサーチバックする。
3つのCVI(CVI、CV−1、CV+1)をループ化する。
(最初の仮定サーチ)
検出されたパルスは、P4であると仮定する(4個のうち3個を検出しなければならない)。
3つの可能性ある遅延場所に対する各々のCVIループに関して、P3位置によって規定するTstart、Tstart−1、Tstart+1。もし検出が行われた場合、その検出を記録する。
【0076】
P2位置によって規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。検出が行われた場合には、その検出を記録する。
P1位置によって規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。検出が行われた場合、その検出を記録する。
少なくとも3個のプレアンブルうちの2個を検出した場合には、その検出したプレアンブルの最大と最小振幅が削減され、最小対最大振幅が0.5より大きい場合には、レベル2の検出を宣言する。
T0(D1エンド)の位置を計算して、単パルスデータ(以下に記す)を計算する。
(第二の仮定サーチ)
検出されたパルスはP3(すべての3を検出する必要がある)
P2位置で規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。もし検出が行われたら、その検出を記録する。
P1位置によって規定されたTstart、Tstart−1及びTstart+1の3つの可能性ある遅延場所に関する各々のCVIループに関して。もし検出が行われたら、その検出を記録する。
P2とP1プレアンブルが検出された場合、その検出されたプレアンブルの最大と最小の振幅が削減され、もし最小と最大振幅0.5よりも大きい場合には、レベル2の検出が宣言される。
T0(D1エンド)の位置を計算して、単パルスデータ(以下に記す)を計算する。
【0077】
4個のプレアンブル全部が存在する場合には、第二の仮定が第一に解読されて、後で、第一の仮定によってオーバーライトされることを覚えておくべきである。最初のサーチ位置、P1、P2、P3に対するi、P4からのkセルは、以下のように表される。
i=k−(26.625+S1)/0.0625)−1
i=k−(17.250+S2)/0.0625)−1
i=k−(5.000+S3)/0.0625)−1
【0078】
最初のサーチ位置、P13に対するP1とP2に対するiは以下のように表される。
i=k−(21.625+S1−S3)/0.0625)−1
i=k−(12.25+S2−S3)/0.0625)−1
【0079】
レベル2のプレアンブル決定に関して、このプレアンブルを検出するために使用するCVIは、正しい拡散機能が、データ処理の間に使用出来るように、記録され、データプロセスに送られなければならない。
【0080】
プレアンブルが検出されたストローブ信号が検出された時、RSLSと単パルス処理49が稼動される。第一に、相関機能によって報告されるように、振幅が相関されたSUMが報告される。その機能は、奇数と偶数振幅から、より大きな相関関係を有するものを選択して、それをSUM信号として使用する(サンプルと位相との関係によって、たった1つのチャンネルが、正しく相関される)。選択された振幅合計と、プレアンブルが検出されたストローブ信号は、RSLSと単パルスプロセスに報告される。この機能は、次の式において、RSLS禁止パルス、単パルスビームサイド、このビームサイドに関係する位相差と、単パルス信号DVを計算する。
DV=Log2(SUM)−Log2(DIF)
このデータは、現在のプレアンブルのために記録された奇数と偶数プレアンブルデータと一緒に、検出されたプレアンブルデータ記憶装置に記録し、記憶される。
【0081】
過去のプレアンブル論理回路のサーチが、他のプレアンブルのために、検出されたプレアンブルデータ記憶装置をスキャンする場合、それは、RSLSによってマークされたプレアンブルを、サイドローブから出たものとして無視する。しかし、妥当なプレアンブルが検出された場合、それは、このプレアンブルに関係する単パルスデータを抽出する。レベル1又はレベル2のプレアンブルセットが検出された場合、そのプレアンブルのために記録された単パルスデータは、単パルス平均論理回路によって処理されて、最終的な単パルスデータが計算される。
【0082】
レベル1単パルスデータは、次の様に計算される(奇数と偶数のチャンネルは別々に)、もしその2つのプレアンブル単パルスデータが同じサイドにある場合であり、
abs(DV1−DV2)<K1、という条件の下では、
2つのプレアンブルは、同じ方位角から出ており、その単パルスの方位角信号は次のように表される。
【数11】
ビームサイドデータと同様にこれらの値は、T0パルスと共に報告される。
【0083】
もし単パルスデータがこれらの必要条件に合致しない場合には、その単パルス方位角データは無視され、失敗した単パルスデータは、報告される。レベル2に関して、サーチプロセスによって識別された3又は4個のプレアンブルは、次の様に評価される。同じサイドにあるすべてのプレアンブルは1つにまとめられる。1つのメンバー以上を有する各々のグループに関しては、もし、より大きいもの(DVmax)が、より小さいもの(DVmin)より大きいK2以上である場合には、そのセットは、同じ対象物から派生したと考えられる。そして、DVは全体グループの平均であり、単パルス方位角データは報告される。1個のグループ以上のグループが、上記の必要条件に合致するが、異なるサイドから派生している場合には、単パルスデータは無視され、「失敗」した単パルスは報告される。もし、いずれのチャンネルのグループも上記の基準に合致しない場合には、単パルスデータを拒否し、「失敗した」単パルスを報告すること。単パルスの情報は、T0ストローブ信号に付加して、その情報を、システムに報告するデータセットの一部にすることが出来る。
【0084】
[RSLSと単パルス処理49]
図8、9に示されるRSLSと単パルス処理は、プレアンブル決定論理回路48と共同で作動して、RSLSと単パルスデータを生成する。それは、単一プレアンブルシンボルRSLSステータスと、このプレアンブルのための単パルス値を計算して、それをプレアンブル決定論理回路48に報告するが、このプレアンブル決定論理回路では、このデータが評価されて、いずれかの所与のデータアイテムと関係するプレアンブルセット全体のための最終単パルスが計算され、報告される。ここで生成されたRSLS禁止パルスは、サイドローブによって検出されたプレアンブルが、この処理に使われるのを防止する。
【0085】
RSLS機能は、OMNI(あらゆる参考例)アンテナ振幅データを、32MHzレートで、受信機22によって提供されたものとして認可して、そのOMNIレベルをSUMレベルと比較することによって、信号がメインビームから派生したものか、サイドローブから派生したものなのかを判断する。
【0086】
図8に示すRSLS処理は、受信機22からの32MHz OMNI振幅信号を受信する。スプリッタ160は、この信号を2つの16MHz奇数、偶数チャンネルに分割して、それは、それぞれ振幅圧縮奇数、偶数機能162、164に送られ、その機能162、164において、信号は圧縮されて、付加的なPG S/N改良を実現する。データデコーダ32、34によって生成されたSUM位相チップと、固定プレアンブルコードは、OMNI振幅信号圧縮のために使われる。奇数と偶数の圧縮データは、今、選択OMNI振幅機能168に送られて、その機能168において、奇数と偶数OMNI信号は、プレアンブル決定論理回路48から受信したプレアンブルが検出されたストローブ信号によって制御される。プレアンブルが、プレアンブル決定論理回路48によって報告された場合、圧縮された奇数と偶数OMNI信号が評価され、2つのうちの強い方が、RSLS処理49のために使用される。この機能が必要である理由は、ユニークなサンプル場所で、位相転移が起こった場合には、たった1つのチャンネルだけが適切な圧縮を提供するからである。最後に、改良されたS/N比を提供するために圧縮されたOMNI信号は、プレアンブル決定論理回路によって提供されるSUM圧縮信号と比較される。RSLSゲート49決定レベルは、RSLS閾値(Kファクタ)によって、オペレータ選択可能値の3dB乃至18dBに設定されるが、これは、SUM対OMNI比を1.41乃至7.94に平均化する。
【0087】
RSLS機能は、プレアンブル決定論理回路48によって報告されるように、各々のプレアンブルで作動する。RSLSゲートが稼動して、プレアンブル決定論理回路48に報告されると、そのプレアンブルは、拒否されて、もし十分な数のプレアンブルが拒否されると(レベル1では1つ、レベル2では少なくとも2つ)、このプレアンブルセットに関係するデータは、データレポートのために考慮されない。データセット全体を拒否するためにRSLS49を使用することは勧められない理由は、このデータセットには、妥当なプレアンブルセットが存在するからである。プレアンブルパルス(S/N比を改善するために)全体の単純な非コヒーレントな統合に対する圧縮を使用する利点は、時間分解能は保たれ、その間に、S/N比が改善され、密集したレポートを独立して処理することが可能になる。
【0088】
RSLSゲート49出力を使用する時、ゲートが実際に、プレアンブルの予想された位置とオーバーラップすることを保証するために、タイミングは注意深く評価されるべきである。
【0089】
図9に示す単パルス処理は、受信機22からの32MHz DIFFチャンネル振幅と位相信号を受信して、単パルスビーム評価のために必要なプレアンブルの単パルス信号を計算して、それをプレアンブル決定論理回路48に報告するが、そのプレアンブル決定論理回路48では、それはさらに平滑化され、単パルステーブルへ指令するために適切な信号を生成する。
【0090】
受信機22から入力された32MHz DIFF振幅信号は、2つのチャンネル、奇数と偶数に分割される。各々のチャンネル信号は、奇数と偶数のチップSUM信号を使用して圧縮され、固定プレアンブルコードは、振幅圧縮偶数、奇数機能176、178に記憶される。DIFF圧縮された振幅奇数、偶数信号は、その2つの信号を比較して、出力のために高い方を選択する選択DIFF振幅機能179に送られる。選択されたDIFF振幅179も、プレアンブル決定論理回路48から、プレアンブルを検出したストローブ信号を受信し、プレアンブルが検出されたことを示す。かつ、プレアンブルが存在するときにのみ、選択したDIFF振幅を報告する。ログと差機能180は、SUMとDIFFを相関させた信号を、ログベース2値(このスケーリングは、SIF単パルスデータで実施したように行う)に変換して、その2つのログ値を引いて、差信号DVを生成する。
DV=Log2(SUM)−Log2(DIF)
DV信号は、プレアンブル決定論理回路48に戻され、そのプレアンブル決定論理回路48で、最終的なDVの計算と平滑化のために、他の記憶したプレアンブルと一緒に使用する。
【0091】
単パルスビームの方向は、位相SUMと、受信機22で受信した位相DIFF信号から計算される。切断テーブル182は、報告した位相の3MSBを使用して、8ビット位相データを4ビットに切断する。DIFF位相は、システムから受信した位相オフセットによってオフセットされ、機会の対象物から計算して、対象物のビームサイドに従って、単パルス位相シフトを約0度と約180度に設定する。各々の位相チャンネルを、LSB当たり27.692度と、ゼロ乃至332.304度の範囲を有する位相読み込みモジュロ13に短縮される。位相差デルタ位相は、次のように計算される。
デルタ位相=短縮された合計位相−短縮された差位相
【0092】
プレアンブル検出論理回路で受信したプレアンブル検出ストローブ信号が、プレアンブルが検出されたことを示している時、デルタ位相186が実行される。その時、処理によって測定されたデルタ位相は、記録され、報告される。デルタ位相信号は、理論的には、(対象物のビームサイドによって)2つの値、ゼロと180度を保持することになる。しかし、ノイズとシステムエラーによって、ゼロ値は、オリジナル値から幾分、プラス又はマイナスの範囲を浮遊する可能性がある(マイナス値は、360度のモジュロ13において、高いプラスの数字として表される)。180度の値も、中心値を周囲で浮遊する。最終的なビームサイドの選択は、デルタ位相値に基づいて「0」または「1」を出力する256ビームサイドテーブルによって決定される。ビームサイド信号とそれに関連したデルタ位相は、さらなる処理のために、プレアンブル決定論理回路48に戻される。この場所では冗長と思われるデルタ位相が保持されて、別々のモード5位相オフセット計算が、システムによって達成される。モード5システムは、SIF処理とは異なるIFチャンネルを使用する場合には、それが必要である。
【0093】
[ウォルシュデータ相関器システム52]
ウォルシュ相関器システム52は、奇数、偶数チップデータストリングと、どこでデータが始まるか示したT0ストローブ信号とを受信する。それは、16ビットウォルシュ相関器60、62を使用して両方のチャンネルの相関テストを実施して、入力ストリングに記憶されているデータを識別し、その最良のデータセットが、システムに報告されることを確認する。図10に示すプロセスは、プレアンブルデータは、データ相関プロセスで必要な時間パルスを抽出するために使用される入力時間プロセスと、入力16ビットデータを、ウォルシュコード機能と相関させ、4ビットデータと、相関値を抽出する相関と決定プロセスから成っている。最後は、決定プロセスで、このプロセスにおいて、最良のデータセットと検出決定が実行される。
【0094】
収束プロセス54は、プレアンブル時間から開始して、シンボルデータが記録される前に、カウントされるべきチップの数を計算するタイマ200を含んでいる。プレアンブルエンド(レベル1にとってはP2、レベル2にとってはP4)に対してD1エンドの位置は、正確に2.0625μsecであり、その値は、16MHzサンプリングレートでは、33チップと同じである。しかし、最後の3つのチップの前に、プレアンブル決定が完成して、プレアンブル決定ポイントから、36チップであるD1エンドまでのトータルのチップ計算をする。D1の最初まで戻るために、スタートのD1は、それをする前の18チップであって、プレアンブル決定ポイントから18チップをカウントすることになる。タイマは記録するべきシンボル数を設定するが、レベル1では9で、レベル2では33である。
スタートセル=プレアンブルセル+18
シンボル=レベル1にとって9
レベル2にとって33
【0095】
タイマ200は、記録すべきシンボルの位置をマークするストローブ信号を生成する。これらのシンボルは、収束と記憶データ機能202によって一時に1つ処理されるが、この機能202では、データは、収束テーブル204から受信した拡散機能を使用して収束する。すべての256拡散機能を記憶するこのテーブルは、システムによって報告されるように、レベル1またはレベル2のインデックスが付けられている。レベル1に関しては、システムで報告されたインデックスが直接、使われている。レベル2の場合、選択されたインデックスは、記憶インデックステーブル206に記憶された3つの可能性あるインデックスのうちの1つで、プレアンブルで報告されたCVI使用信号によって選択される。拡散プロセスは、シンボルデータを有する拡散コードの桁上げを行わないビット毎のモジュロ2加算である。
(i=0、i<16、i++)に対して
//単一ビットを抽出する
ビット=拡散機能&0x0000001
シンボル[15−i]=シンボル[15−i]+ビット
もし、(シンボル[15−i]=2)
シンボル[15−i]=0、
拡散機能=拡散機能>>1、
【0096】
可能性あるサンプリングエラーをオフセットするために、そのプロセスは、プレアンブルによってマークされた時間に、T0位置からオフセットされた1個のチップ位置からのプラス、マイナスのために実施される。3個のデータセットは、相関プロセスのために、収束と記憶機能の中に記憶される。
【0097】
[データ相関]
ウォルシュ相関器機能52は、データレジスタ54(収束後)に記憶された入力データと、16ウォルシュコードとの相関を取り、最良のマッチングを発見する。相関機能は、次のように記述することが可能である。
【数12】
ただし、
VDATA(N)=データレジスタの中の各々のセルに記憶されたデータ
VCODE(N)=各々のセルに、ダイレクト又は逆数コードレジスタに記憶されたコード
XOR’=セルの中のコードとデータが一致する場合は+1、一致しない場合は−1
である。
【0098】
各々のシンボルは、16個のウォルシュコードすべてと相関を取り、最も高い相関値を、そのシンボルの4データビットの内容を決定するために使用する。すべてのシンボルに関してそのプロセスを実施して、相関合計と共に、各々のシンボルの相関値をデータに記憶する。プロセスは、1チップ位置に対するプラス、マイナスと、奇数、偶数チャンネルに対して繰り返す。従って、トータル6つのテストが、データセット(奇数と偶数セット、各々のセットの3つの位置)に対して実施される。
【0099】
ウォルシュ相関は、データセットの間の最良の分離を提供する特別コードセットを使用する。
char Walsh[16][16] = { {1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1}, {1,1,1,1, 1,1,1
,1, 0,0,0,0, 0,0,0,0},
{1,1,1,1, 0,0,0,0, 0,0,0,0, 1,1,1,1}, {1,1,1,1, 0,0,0,0, 1,1,1,1, 0,0,0,0},
{1,1,0,0, 0,0,1,1, 1,1,0,0, 0,0,1,1}, {1,1,0,0, 0,0,1,1, 0,0,1,1, 1,1,0,0},
{1,1,0,0, 1,1,0,0, 0,0,1,1, 0,0,1,1}, {1,1,0,0, 1,1,0,0, 1,1,0,0, 1,1,0,0},
{1,0,0,1, 1,0,0,1, 1,0,0,1, 1,0,0,1}, {1,0,0,1, 1,0,0,1, 0,1,1,0, 0,1,1,0},
{1,0,0,1, 0,1,1,0, 0,1,1,0, 1,0,0,1}, {1,0,0,1, 0,1,1,0, 1,0,0,1, 0,1,1,0},
{1,0,1,0, 0,1,0,1, 1,0,1,0, 0,1,0,1}, {1,0,1,0, 0,1,0,1, 0,1,0,1, 1,0,1,0},
{1,0,1,0, 1,0,1,0, 0,1,0,1, 0,1,0,1}, {1,0,1,0, 1,0,1,0, 1,0,1,0, 1,0,1,0} }
【0100】
16個の相関器が、各々のチャンネルのために実施されているが、そのうちの1つが、図11に図示されている。図11は、ウォルシュデータ相関器60の一部分を示す。データ相関プロセスは、第一のデータシンボルD1の予定時間から開始して、すべてのシンボルについて、一時に1つの割合で実施される。データVin(k)は、データレジスタ212に入力される。ウォルシュコードは、コードレジスタ216に記憶される。16ビットXORアレイ214は、入力データの対応ビットの内容とウォルシュコードと比較をする。XOR機能の出力は、出力信号Vout1(k)を提供する加算器218に入力する。
【0101】
データオーダとウォルシュコードオーダ(リストすべき大部分)とは注意深く一致させることが必要である。各々の相関関係のバイポーラ値によって、偽対象物の相関合計は、0に収束する傾向にあり、真の対象物合計は、プラス又はマイナス値(同相であるか、逆相であるデータによって)に収束することを記憶しておくべきである。最大絶対相関値は、レベル1に関して|9×16=144|、又はレベル2に関して|33×16=528|である。
【0102】
奇数及び偶数データセットと、各々のシンボルのための関連する相関結果と、各々のセットの相関合計は、報告すべき最終データセットを選択するデータ決定プロセスと相互関連するデータセット記憶機能に記憶される。
【0103】
[データ決定プロセス56]
データ決定機能は、すべてのテストと、偶数と奇数チャンネルの両方のために出力された相関器合計を読取り、データアイテムを認可するか、拒否するかの最終的な判断をする。相関合計(絶対値)は、レベル1又はレベル2の閾値と比較され、それがテストを通過した場合、データセットは妥当だと認められる。1個のセット以上が閾値を超えている場合、最も高い相関値のセットが選択されて、外部世界に報告される。この閾値レベルは、プレアンブルの閾値設定と組み合わされて、システム偽アラームPfa及び検出確率Pdを規定する。
【0104】
典型的には、シミュレーションによって記録されるように、レベル1とレベル2データセットのための結果、レベル2とレベル1のデータセット、プレアンブルのトリガ及び相関結果のストローブ信号は、時間関数として示される。レベル2のレポートは、低10dB S/N対象物のための168の相関レベルを有している。16dB相関レベルのレベル1の対象物S/Nは144(可能な最大値)である。
【0105】
分割プロセスによって、対象物決定は、2つの連続したセル(奇数、偶数チャンネルによって提供された)に出現可能である。そのような対象物を2度報告するのを防止するために、次のセルのデータをテストして、2つのうちの大きい方を選択する簡単なアルゴリズムが実行される。それは、現在と次のセルのスコアをテストして、もし現在のスコアがより大きい場合には、現在のセルが負荷され、カウンターを1増加して、次のセルをスキップする。
もし(abs(検出されたデータ[i].スコア)>=abs(検出されたデータ[i+1].スコア))
データ決定[i]=レベル1の検出
i=i+1
【0106】
[EDACプロセス58]
図12のフロー図に示したEDACプロセスは、ウォルシュデータ相関器52によって報告されたレベル2データセットに対して実行される。EDAC58は位置を識別して、11個のシンボルのグループの中の誤りの1つのシンボル又はそのエラー位置が知られている場合には、2つの誤りのシンボルを訂正する。この機能をサポートするために、レベル2のデータを、それぞれ11個のシンボルを有する3つのグループにおいて構成することにより、EDAC機能は、各々のグループに対して一時に実行することが可能になる。
【0107】
ウォルシュデータ相関器52は、11個のシンボルを有する各々のグループをEDACプロセス58に報告する。エラーレベルを評価するために、シンドロームと呼ばれるS1とS2値は、11個のシンボルを有する各々のグループのために計算して、ウォルシュ相関器によって記録されるように、各々のシンボルの相関レベルが評価される。以下にリスト化された事象の順番が、図13に示されている。
【0108】
2つのシンドローム、S1とS2が計算される。両方のシンドロームがゼロの場合、EDACプロセスが終了して、データには、何ら訂正はされない。
【0109】
そのシンドロームのうちの1つか両方がゼロではなく、少なくとも2つのシンボル相関値が16以下の場合には、消去プロセスが適用される。2つの誤りのシンボル(消去プロセスのために必要)の位置が、最も低いスコアを有するシンボルとして規定される。2つ以上のシンボルが同じ最小スコアを有すると、2つの最小スコアシンボルのランダムな選択が使用される。データセットが、消去プロセスによって訂正され、機能が呼び出し機能に戻る。
【0110】
S1とS2シンドロームが両方ともゼロではなく、少なくとも1つの相関値が16以下の場合には、単一のエラーEDACプロセスが適用される。11個のシンボルのデータセットは、そのプロセスによって訂正されて、機能は呼び出し機能に戻る。
【0111】
モード5のレベル1とレベル2のシンボルセットが、暗号コンピュータ60に報告されるが、その暗号コンピュータは、データを解読して、モード5のIFFが必要な戦術情報を返す。
【0112】
図13は、受信機22から出力された信号を示す。信号はプレアンブル情報とともに始まり、ATCで使用されるデータを提供する。図14は、図13の受信機出力信号によって出力されるプレアンブル位相相関器を示す。図15は、プレアンブル振幅圧縮信号を示す。
【0113】
図17は、図16に示される受信機出力信号に応じたプレアンブルトリガマークを示す。受信機出力は、2つのレベル1のプレアンブルを有している。そのプレアンブル相関器は、データが存在することを示す、図17に示すようなプレアンブルトリガマークを生成する。このデータは、144(図18、19)の相関値、つまりレベル1データとしての最大値を提供するウォルシュ相関器52によって処理される。その結果、データ決定ストローブ信号が生成されて、そのデータセットの妥当性を示している。
【0114】
図20は、プレアンブル閾値と、データ閾値によって設定された偽アラームレートデータを示している。プレアンブル閾値は、データ相関プロセスを稼動させる多くのプレアンブルトリガを制御して、一方で、データ閾値は、データが報告される対象のデータ相関スコアを設定する。図20は、プレアンブル閾値をパラメータとしたデータ閾値を設定する機能として、偽アラームの確率Pfaを示す。10−7Pfa設定(16MHzのレートにおいて毎秒16の偽レポート)において、レベル1の閾値設定は90であり、プレアンブル閾値は12である。
【0115】
図21は、検出確率Pdを示す。検出確率は、データ信号のノイズに対する比(S/N比)の関数である。2つのタイプの検出確率が考えられるが、1つは、プレアンブル決定Pddataに基づくデータの検出確率Pddataであり、もう1つは、正しく復号されたデータシンボルすべてを有する確率Pdcorrectである。データ閾値設定をパラメータとした信号対ノイズ比の関数としての、2つのレベル1の確率は、図21に示されている。図21のグラフのためのプレアンブル閾値設定は、12である。
【符号の説明】
【0116】
20 航空管制システム
22 デジタル受信機
24 信号スプリッタ
26 奇数チャンネル
28 偶数チャンネル
32 奇数チャンネルデータデコーダ
36 偶数チャンネルデータデコーダ
38 プレアンブル相関器
40、44 振幅相関器
42、46 位相相関器
48 プレアンブル決定論理回路
49 単パルスレーダ信号処理回路
52 ウォルシュデータ相関器システム
100 FIFO入力レジスタ
102 相関器
104 排他的ORゲートアレイ
110 加算器
120 第1のFIFOデータレジスタ
122 第2のFIFOデータレジスタ
124 排他的ORゲート
125 乗算器アレイ
126 コードマスクレジスタ
128 加算器
130 振幅読取器
132 奇数プレアンブルシンボル検出器
134 偶数プレアンブルシンボル検出器
138 プレアンブル検出器
140 検出プレアンブルデータ記憶装置
RSLS 応答経路サイドローブ抑制
【特許請求の範囲】
【請求項1】
航空機からのデジタルレーダ信号を受信するように配置されたデジタル受信機(22)に前記航空機から発信されたプレアンブルとフライト情報を含む前記デジタルデータストリームを処理する航空管制システム(20)であって、振幅と位相信号出力を提供するように配置された前記航空管制システムは、
奇数番号パルスの1組と偶数番号パルスの1組とを送信するように配置され、それぞれ奇数チャンネル(26)と偶数チャンネル(28)の間の受信機(22)からの振幅と位相信号出力を分割するように配置された信号スプリッタ(24)と、
奇数チャンネル(26)で符号化された信号を抽出し、奇数データストリームを形成するために前記信号スプリッタ(24)に接続された奇数チャンネルデータデコーダ(32)と、
偶数チャンネル(28)で符号化された信号からデータを抽出して、偶数データストリームを形成するために、前記信号スプリッタ(24)に接続された偶数チャンネルデータデコーダ(36)と、
奇数及び偶数データストリームと、規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出するための奇数及び偶数チャンネルデコーダ(32、36)に接続されたプレアンブル相関器(38)と、
前記プレアンブル相関器(38)から出力された信号を処理して、妥当可能性あるプレアンブルのうちのどちらが実際に妥当であるか識別するために配置されたプレアンブル決定論理回路(48)と
を具備することを特徴とする航空管制システム(20)。
【請求項2】
前記信号スプリッタ(24)と前記奇数チャンネルデータデコーダ(32)との間の前記奇数チャンネル(26)の中の奇数チャンネル差分位相検出器(30)と、
前記信号スプリッタ(24)と前記偶数チャンネルデータデコーダ(36)との間の前記偶数チャンネル(28)の中の偶数チャンネル差分位相検出器(34)とを更に具備することを特徴とする請求項1の航空管制システム(20)。
【請求項3】
前記プレアンブル相関器(38)は、
奇数チャンネル振幅を示す信号を受信するために前記信号スプリッタ(24)に接続された第1の入力と、復号された奇数信号を受信するために前記奇数チャンネルデータデコーダ(32)に接続された第2の入力とを有する奇数チャンネル用の振幅相関器(40)であって、奇数振幅相関器合計信号を生成するように配置された奇数振幅相関器(40)と、
奇数チャンネル信号の位相を示す信号を受信するために前記奇数チャンネルデータデコーダ(32)に接続された奇数チャンネル用の位相相関器(42)であって、奇数位相相関器合計信号を生成するように配置された奇数位相相関器(42)と、
前記偶数チャンネル振幅を示す信号を受信するために、前記信号スプリッタ(24)に接続された第1の入力と、復号された偶数信号を受信するために、前記偶数チャンネルデータデコーダ(36)に接続された第2の入力とを有する偶数チャンネル用の振幅相関器(44)であって、偶数振幅相関器合計信号を生成するために配置された偶数振幅相関器(44)と、
偶数チャンネル信号の位相を示す信号を受信するために、前記偶数チャンネルデータデコーダ(36)に接続された偶数チャンネル用の位相相関器(46)であって、偶数位相相関器合計信号を生成するために配置された偶数位相相関器(46)とを備えることを特徴とする請求項2の航空管制システム(20)。
【請求項4】
データストリーム中のサイドローブによって生成されたプレアンブルを抑制するため、及び単パルスレーダデータを生成するために、前記プレアンブル決定論理回路(48)と、受信機(22)に接続された応答経路サイドローブ抑制(RSLS)と、単パルスレーダ信号処理回路(49)とを更に具備することを特徴とする請求項3の航空管制システム(20)。
【請求項5】
偶数及び奇数チャンネル(28、26)の中のデータを識別して、どちらのチャンネル(26、28)が、更なる処理のために使用すべき最良のデータを有するのかの判断するためのウォルシュデータ相関器システム(52)を更に具備することを特徴とする請求項4の航空管制システム(20)。
【請求項6】
前記位相相関器(42、46)の各々は、
前記対応するデータデコーダ(32、36)から入力されたデータビットを受信するために配置されたFIFO入力レジスタ(100)と、
記憶されたプリセットコードを有する相関器(102)と、
前記FIFO入力レジスタ(100)と前記相関器(102)との間に接続された排他的ORゲートアレイ(104)であって、前記相関器(102)に記憶されたビットと前記FIFO入力レジスタ(100)の対応するビットとの乗算をするように配置され、各々のデータビットが、コードの中の前記対応するビットと合致するか否かを示す結果を生成する前記排他的ORゲートアレイ(104)と、
前記排他的ORゲートアレイ(104)から出力された信号を加算して、すべてのセルの生産物の合計である相関結果を生成するように配置された加算器(110)とを含むことを特徴とする請求項2の航空管制システム(20)。
【請求項7】
前記振幅相関器(40、44)の各々は、
前記対応するデータデコーダからの位相データを受信するように配置された第1のFIFOデータレジスタ(120)と、
前記信号スプリッタからの振幅データを受信するように配置された第2のFIFOデータレジスタ(122)と、
記憶されたプレアンブルコードマスクを有したコードマスクレジスタ(126)と、
前記第1のFIFOレジスタ(120)のデータを、前記プレアンブルコードマスクレジスタ(126)に記憶された前記プレアンブルコードマスクと比較するように配置された排他的ORゲート(124)のアレイと、
前記プレアンブルコードマスクレジスタ(126)の中の前記コードマスクビットの生産物と、前記第2のFIFOレジスタ(122)の中の前記対応する振幅データビットの生産物を形成するように配置された乗算器アレイ(125)と、
前記乗算器アレイ(125)から出力された信号の合計を形成するように配置された加算器(128)とを含むことを特徴とする請求項3の航空管制システム(20)。
【請求項8】
プレアンブル決定論理回路(48)は、
前記奇数及び偶数振幅相関器(40、44)からの合計信号を受信するように配置された振幅読取器(130)と、
前記奇数位相相関器(42)からの合計信号を、プレアンブル閾値と比較するように配置された奇数プレアンブルシンボル検出器(132)と、
前記偶数位相相関器(46)を、前記プレアンブル閾値と比較するように配置された偶数プレアンブルシンボル検出器(134)と、
前記第1及び第2のプレアンブルシンボル検出器(132、134)からの信号を受信し、有効なプレアンブルの検出を示すプレアンブル検出信号を生成するように配置されたプレアンブル検出器(138)と、
前記検出されたプレアンブル信号を受信するように配置された検出プレアンブルデータ記憶装置(140)とを含むことを特徴とする請求項1の航空管制システム(20)。
【請求項9】
前記受信機(22)が、振幅と位相信号出力を提供するように配置されており、航空管制のために航空機から、前記航空機からのデジタルレーダ信号を受信するために配置された受信機(22)に送信されたプレアンブルとフライト情報を含むデジタルデータストリームを処理するための方法であって、
奇数番号パルスの1組と偶数番号パルスの1組とを送信するように配置され、それぞれ奇数チャンネル(26)と偶数チャンネル(28)の間の前記受信機(22)からの振幅と位相信号出力を分割するように配置された信号スプリッタ(24)を配置するステップと、
奇数チャンネル(26)で符号化された信号を抽出して、奇数データストリームを形成するために、前記信号スプリッタ(24)に接続された奇数チャンネルデータデコーダ(32)を接続するステップと、
偶数チャンネル(28)で符号化された信号からデータを抽出して、偶数データストリームを形成するために、前記信号スプリッタ(24)に偶数チャンネルデータデコーダ(36)を接続するステップと、
奇数及び偶数データストリームと、規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出するための、奇数及び偶数チャンネルデコーダ(32、36)にプレアンブル相関器(38)を接続するステップと、
妥当可能性あるプレアンブルのうちのどちらが実際に妥当であるか識別するための前記プレアンブル相関器(38)から出力された信号を処理するためにプレアンブル決定論理回路(48)を配置するステップと
を具備することを特徴とする方法。
【請求項10】
前記信号スプリッタ(24)と、前記奇数チャンネルデータデコーダ(32)との間の前記奇数チャンネル(26)の中の奇数チャンネル差分位相検出器(30)を配置するステップと、
前記信号スプリッタ(24)と前記偶数チャンネルデータデコーダ(36)との間の前記偶数チャンネル(28)の中の偶数チャンネル差分位相検出器(34)を配置するステップとを更に具備することを特徴とする請求項9の方法。
【請求項11】
前記奇数チャンネル振幅を示す信号を受信するために前記信号スプリッタ(24)に接続された第1の入力と、復号された奇数信号を受信するために前記奇数チャンネルデータデコーダ(32)に接続された第2の入力とを有する奇数チャンネル振幅相関器(40)を含むために前記プレアンブル相関器(38)を形成するステップと、
奇数の振幅相関器合計信号を生成するために前記奇数振幅相関器(40)を配置するステップと、
奇数チャンネル信号の位相を示す信号を受信するために、前記奇数チャンネルデータデコーダに接続された奇数位相相関器(42)を含むために前記プレアンブル相関器を形成するステップと、
奇数位相相関器合計信号を生成するために、前記位相相関器(42)を配置するステップと、
前記偶数チャンネル振幅を示す信号を受信するために、前記信号スプリッタ(24)に接続された第1の入力と、復号された偶数信号を受信するために、前記偶数チャンネルデータデコーダ(36)に接続された第2の入力を有する偶数チャンネル振幅相関器(44)を含むために、前記プレアンブル相関器(38)を形成するステップと、
偶数チャンネル振幅相関器合計信号を生成する偶数振幅相関器(44)を配置するステップと、
偶数位相相関器合計信号を生成するために前記偶数チャンネル位相相関器(46)を配置するステップとを更に具備することを特徴とする請求項10の方法。
【請求項12】
データストリーム中のサイドローブによって生成されたプレアンブルを抑制するため、及び単パルスレーダデータを生成するために、応答経路サイドローブ抑制(RSLS)と、単パルスレーダ信号処理回路(49)とを、前記プレアンブル決定論理回路(48)と、受信機(22)に接続するステップを更に具備することを特徴とする請求項11の方法。
【請求項13】
偶数及び奇数チャンネルの中のデータを識別して、どちらのチャンネルが、更なる処理のために使用すべき最良のデータを有するのか判断するためのウォルシュデータ相関器システム(52)を提供するステップを更に具備することを特徴とする請求項12の方法。
【請求項14】
前記対応するデータデコーダ(32、36)から入力されたデータビットを受信するために配置されたFIFO入力レジスタ(100)を含むために、各々のプレアンブル位相相関器(42、46)を配置するステップと、
記憶されたプリセットコードを有する相関器(102)を含むために各々のプレアンブル位相相関器(42、46)を配置するステップと、
前記FIFO入力レジスタ(100)と前記相関器(102)との間に接続された排他的ORゲートアレイ(104)を含むために各々プレアンブル位相相関器(42、46)を配置するステップと、
前記相関器(102)に記憶されたビットと前記FIFO入力レジスタ(100)の対応するビットとの乗算をして、各々のデータビットが、コードの中の前記対応するビットと合致するか否かを示す結果を生成する前記排他的ORゲートアレイ(104)を配置するステップと、
前記ORゲートアレイ(104)から出力された信号を加算して、すべてのセルの生産物の合計である相関結果を生成するための加算器(110)を含むために各々のプレアンブル位相相関器(42、46)を配置するステップとを更に具備することを特徴とする請求項10の方法。
【請求項15】
前記対応するデータデコーダからの位相データを受信するように配置された第1のFIFOデータレジスタ(120)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
前記信号スプリッタ(24)からの振幅データを受信するように配置された第2のFIFOデータレジスタ(122)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
記憶されたプレアンブルコードマスクを有したコードマスクレジスタ(126)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
前記第1のFIFOレジスタ(120)のデータを、前記プレアンブルコードマスクレジスタ(126)に記憶された前記プレアンブルコードマスクと比較するための排他的ORゲート(124)のアレイを含むために前記振幅相関器(40、44)の各々を形成するステップと、
前記プレアンブルコードマスクレジスタ(126)の中の前記コードマスクビットの生産物と、前記第2のFIFOレジスタ(122)の中の前記対応する振幅データビットの生産物を形成するための乗算器アレイ(125)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
前記乗算器アレイ(125)から出力された信号の合計を形成するための加算器(128)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップとを更に具備することを特徴とする請求項11の方法。
【請求項16】
前記偶数及び奇数振幅相関器(44、40)からの合計信号を受信するように配置された振幅読取器(130)を含むために前記プレアンブル決定論理回路(48)を形成するステップと、
前記奇数位相相関器(42)からの合計信号を、プレアンブル閾値と比較するための奇数プレアンブルシンボル検出器(132)を含むために前記プレアンブル決定論理回路(48)を形成するステップと、
前記偶数位相相関器(46)からの合計信号を、前記プレアンブル閾値と比較するための偶数プレアンブルシンボル検出器(134)を含むために前記プレアンブル決定論理回路(48)を形成するステップと、
前記第1と第2のプレアンブルシンボル検出器(132、134)からの信号を受信し、有効なプレアンブルの検出を示すプレアンブル検出信号を生成するために配置されたプレアンブル検出器(138)を含む前記プレアンブル決定論理回路(48)を形成するステップと、
前記プレアンブル検出信号を受信するための検出プレアンブルデータ記憶装置(140)を含むために前記プレアンブル決定論理回路(48)を形成するステップとを更に具備することを特徴とする請求項9の方法。
【請求項1】
航空機からのデジタルレーダ信号を受信するように配置されたデジタル受信機(22)に前記航空機から発信されたプレアンブルとフライト情報を含む前記デジタルデータストリームを処理する航空管制システム(20)であって、振幅と位相信号出力を提供するように配置された前記航空管制システムは、
奇数番号パルスの1組と偶数番号パルスの1組とを送信するように配置され、それぞれ奇数チャンネル(26)と偶数チャンネル(28)の間の受信機(22)からの振幅と位相信号出力を分割するように配置された信号スプリッタ(24)と、
奇数チャンネル(26)で符号化された信号を抽出し、奇数データストリームを形成するために前記信号スプリッタ(24)に接続された奇数チャンネルデータデコーダ(32)と、
偶数チャンネル(28)で符号化された信号からデータを抽出して、偶数データストリームを形成するために、前記信号スプリッタ(24)に接続された偶数チャンネルデータデコーダ(36)と、
奇数及び偶数データストリームと、規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出するための奇数及び偶数チャンネルデコーダ(32、36)に接続されたプレアンブル相関器(38)と、
前記プレアンブル相関器(38)から出力された信号を処理して、妥当可能性あるプレアンブルのうちのどちらが実際に妥当であるか識別するために配置されたプレアンブル決定論理回路(48)と
を具備することを特徴とする航空管制システム(20)。
【請求項2】
前記信号スプリッタ(24)と前記奇数チャンネルデータデコーダ(32)との間の前記奇数チャンネル(26)の中の奇数チャンネル差分位相検出器(30)と、
前記信号スプリッタ(24)と前記偶数チャンネルデータデコーダ(36)との間の前記偶数チャンネル(28)の中の偶数チャンネル差分位相検出器(34)とを更に具備することを特徴とする請求項1の航空管制システム(20)。
【請求項3】
前記プレアンブル相関器(38)は、
奇数チャンネル振幅を示す信号を受信するために前記信号スプリッタ(24)に接続された第1の入力と、復号された奇数信号を受信するために前記奇数チャンネルデータデコーダ(32)に接続された第2の入力とを有する奇数チャンネル用の振幅相関器(40)であって、奇数振幅相関器合計信号を生成するように配置された奇数振幅相関器(40)と、
奇数チャンネル信号の位相を示す信号を受信するために前記奇数チャンネルデータデコーダ(32)に接続された奇数チャンネル用の位相相関器(42)であって、奇数位相相関器合計信号を生成するように配置された奇数位相相関器(42)と、
前記偶数チャンネル振幅を示す信号を受信するために、前記信号スプリッタ(24)に接続された第1の入力と、復号された偶数信号を受信するために、前記偶数チャンネルデータデコーダ(36)に接続された第2の入力とを有する偶数チャンネル用の振幅相関器(44)であって、偶数振幅相関器合計信号を生成するために配置された偶数振幅相関器(44)と、
偶数チャンネル信号の位相を示す信号を受信するために、前記偶数チャンネルデータデコーダ(36)に接続された偶数チャンネル用の位相相関器(46)であって、偶数位相相関器合計信号を生成するために配置された偶数位相相関器(46)とを備えることを特徴とする請求項2の航空管制システム(20)。
【請求項4】
データストリーム中のサイドローブによって生成されたプレアンブルを抑制するため、及び単パルスレーダデータを生成するために、前記プレアンブル決定論理回路(48)と、受信機(22)に接続された応答経路サイドローブ抑制(RSLS)と、単パルスレーダ信号処理回路(49)とを更に具備することを特徴とする請求項3の航空管制システム(20)。
【請求項5】
偶数及び奇数チャンネル(28、26)の中のデータを識別して、どちらのチャンネル(26、28)が、更なる処理のために使用すべき最良のデータを有するのかの判断するためのウォルシュデータ相関器システム(52)を更に具備することを特徴とする請求項4の航空管制システム(20)。
【請求項6】
前記位相相関器(42、46)の各々は、
前記対応するデータデコーダ(32、36)から入力されたデータビットを受信するために配置されたFIFO入力レジスタ(100)と、
記憶されたプリセットコードを有する相関器(102)と、
前記FIFO入力レジスタ(100)と前記相関器(102)との間に接続された排他的ORゲートアレイ(104)であって、前記相関器(102)に記憶されたビットと前記FIFO入力レジスタ(100)の対応するビットとの乗算をするように配置され、各々のデータビットが、コードの中の前記対応するビットと合致するか否かを示す結果を生成する前記排他的ORゲートアレイ(104)と、
前記排他的ORゲートアレイ(104)から出力された信号を加算して、すべてのセルの生産物の合計である相関結果を生成するように配置された加算器(110)とを含むことを特徴とする請求項2の航空管制システム(20)。
【請求項7】
前記振幅相関器(40、44)の各々は、
前記対応するデータデコーダからの位相データを受信するように配置された第1のFIFOデータレジスタ(120)と、
前記信号スプリッタからの振幅データを受信するように配置された第2のFIFOデータレジスタ(122)と、
記憶されたプレアンブルコードマスクを有したコードマスクレジスタ(126)と、
前記第1のFIFOレジスタ(120)のデータを、前記プレアンブルコードマスクレジスタ(126)に記憶された前記プレアンブルコードマスクと比較するように配置された排他的ORゲート(124)のアレイと、
前記プレアンブルコードマスクレジスタ(126)の中の前記コードマスクビットの生産物と、前記第2のFIFOレジスタ(122)の中の前記対応する振幅データビットの生産物を形成するように配置された乗算器アレイ(125)と、
前記乗算器アレイ(125)から出力された信号の合計を形成するように配置された加算器(128)とを含むことを特徴とする請求項3の航空管制システム(20)。
【請求項8】
プレアンブル決定論理回路(48)は、
前記奇数及び偶数振幅相関器(40、44)からの合計信号を受信するように配置された振幅読取器(130)と、
前記奇数位相相関器(42)からの合計信号を、プレアンブル閾値と比較するように配置された奇数プレアンブルシンボル検出器(132)と、
前記偶数位相相関器(46)を、前記プレアンブル閾値と比較するように配置された偶数プレアンブルシンボル検出器(134)と、
前記第1及び第2のプレアンブルシンボル検出器(132、134)からの信号を受信し、有効なプレアンブルの検出を示すプレアンブル検出信号を生成するように配置されたプレアンブル検出器(138)と、
前記検出されたプレアンブル信号を受信するように配置された検出プレアンブルデータ記憶装置(140)とを含むことを特徴とする請求項1の航空管制システム(20)。
【請求項9】
前記受信機(22)が、振幅と位相信号出力を提供するように配置されており、航空管制のために航空機から、前記航空機からのデジタルレーダ信号を受信するために配置された受信機(22)に送信されたプレアンブルとフライト情報を含むデジタルデータストリームを処理するための方法であって、
奇数番号パルスの1組と偶数番号パルスの1組とを送信するように配置され、それぞれ奇数チャンネル(26)と偶数チャンネル(28)の間の前記受信機(22)からの振幅と位相信号出力を分割するように配置された信号スプリッタ(24)を配置するステップと、
奇数チャンネル(26)で符号化された信号を抽出して、奇数データストリームを形成するために、前記信号スプリッタ(24)に接続された奇数チャンネルデータデコーダ(32)を接続するステップと、
偶数チャンネル(28)で符号化された信号からデータを抽出して、偶数データストリームを形成するために、前記信号スプリッタ(24)に偶数チャンネルデータデコーダ(36)を接続するステップと、
奇数及び偶数データストリームと、規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出するための、奇数及び偶数チャンネルデコーダ(32、36)にプレアンブル相関器(38)を接続するステップと、
妥当可能性あるプレアンブルのうちのどちらが実際に妥当であるか識別するための前記プレアンブル相関器(38)から出力された信号を処理するためにプレアンブル決定論理回路(48)を配置するステップと
を具備することを特徴とする方法。
【請求項10】
前記信号スプリッタ(24)と、前記奇数チャンネルデータデコーダ(32)との間の前記奇数チャンネル(26)の中の奇数チャンネル差分位相検出器(30)を配置するステップと、
前記信号スプリッタ(24)と前記偶数チャンネルデータデコーダ(36)との間の前記偶数チャンネル(28)の中の偶数チャンネル差分位相検出器(34)を配置するステップとを更に具備することを特徴とする請求項9の方法。
【請求項11】
前記奇数チャンネル振幅を示す信号を受信するために前記信号スプリッタ(24)に接続された第1の入力と、復号された奇数信号を受信するために前記奇数チャンネルデータデコーダ(32)に接続された第2の入力とを有する奇数チャンネル振幅相関器(40)を含むために前記プレアンブル相関器(38)を形成するステップと、
奇数の振幅相関器合計信号を生成するために前記奇数振幅相関器(40)を配置するステップと、
奇数チャンネル信号の位相を示す信号を受信するために、前記奇数チャンネルデータデコーダに接続された奇数位相相関器(42)を含むために前記プレアンブル相関器を形成するステップと、
奇数位相相関器合計信号を生成するために、前記位相相関器(42)を配置するステップと、
前記偶数チャンネル振幅を示す信号を受信するために、前記信号スプリッタ(24)に接続された第1の入力と、復号された偶数信号を受信するために、前記偶数チャンネルデータデコーダ(36)に接続された第2の入力を有する偶数チャンネル振幅相関器(44)を含むために、前記プレアンブル相関器(38)を形成するステップと、
偶数チャンネル振幅相関器合計信号を生成する偶数振幅相関器(44)を配置するステップと、
偶数位相相関器合計信号を生成するために前記偶数チャンネル位相相関器(46)を配置するステップとを更に具備することを特徴とする請求項10の方法。
【請求項12】
データストリーム中のサイドローブによって生成されたプレアンブルを抑制するため、及び単パルスレーダデータを生成するために、応答経路サイドローブ抑制(RSLS)と、単パルスレーダ信号処理回路(49)とを、前記プレアンブル決定論理回路(48)と、受信機(22)に接続するステップを更に具備することを特徴とする請求項11の方法。
【請求項13】
偶数及び奇数チャンネルの中のデータを識別して、どちらのチャンネルが、更なる処理のために使用すべき最良のデータを有するのか判断するためのウォルシュデータ相関器システム(52)を提供するステップを更に具備することを特徴とする請求項12の方法。
【請求項14】
前記対応するデータデコーダ(32、36)から入力されたデータビットを受信するために配置されたFIFO入力レジスタ(100)を含むために、各々のプレアンブル位相相関器(42、46)を配置するステップと、
記憶されたプリセットコードを有する相関器(102)を含むために各々のプレアンブル位相相関器(42、46)を配置するステップと、
前記FIFO入力レジスタ(100)と前記相関器(102)との間に接続された排他的ORゲートアレイ(104)を含むために各々プレアンブル位相相関器(42、46)を配置するステップと、
前記相関器(102)に記憶されたビットと前記FIFO入力レジスタ(100)の対応するビットとの乗算をして、各々のデータビットが、コードの中の前記対応するビットと合致するか否かを示す結果を生成する前記排他的ORゲートアレイ(104)を配置するステップと、
前記ORゲートアレイ(104)から出力された信号を加算して、すべてのセルの生産物の合計である相関結果を生成するための加算器(110)を含むために各々のプレアンブル位相相関器(42、46)を配置するステップとを更に具備することを特徴とする請求項10の方法。
【請求項15】
前記対応するデータデコーダからの位相データを受信するように配置された第1のFIFOデータレジスタ(120)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
前記信号スプリッタ(24)からの振幅データを受信するように配置された第2のFIFOデータレジスタ(122)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
記憶されたプレアンブルコードマスクを有したコードマスクレジスタ(126)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
前記第1のFIFOレジスタ(120)のデータを、前記プレアンブルコードマスクレジスタ(126)に記憶された前記プレアンブルコードマスクと比較するための排他的ORゲート(124)のアレイを含むために前記振幅相関器(40、44)の各々を形成するステップと、
前記プレアンブルコードマスクレジスタ(126)の中の前記コードマスクビットの生産物と、前記第2のFIFOレジスタ(122)の中の前記対応する振幅データビットの生産物を形成するための乗算器アレイ(125)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップと、
前記乗算器アレイ(125)から出力された信号の合計を形成するための加算器(128)を含むために前記振幅相関器(40、44)のうちの各々を形成するステップとを更に具備することを特徴とする請求項11の方法。
【請求項16】
前記偶数及び奇数振幅相関器(44、40)からの合計信号を受信するように配置された振幅読取器(130)を含むために前記プレアンブル決定論理回路(48)を形成するステップと、
前記奇数位相相関器(42)からの合計信号を、プレアンブル閾値と比較するための奇数プレアンブルシンボル検出器(132)を含むために前記プレアンブル決定論理回路(48)を形成するステップと、
前記偶数位相相関器(46)からの合計信号を、前記プレアンブル閾値と比較するための偶数プレアンブルシンボル検出器(134)を含むために前記プレアンブル決定論理回路(48)を形成するステップと、
前記第1と第2のプレアンブルシンボル検出器(132、134)からの信号を受信し、有効なプレアンブルの検出を示すプレアンブル検出信号を生成するために配置されたプレアンブル検出器(138)を含む前記プレアンブル決定論理回路(48)を形成するステップと、
前記プレアンブル検出信号を受信するための検出プレアンブルデータ記憶装置(140)を含むために前記プレアンブル決定論理回路(48)を形成するステップとを更に具備することを特徴とする請求項9の方法。
【図1】

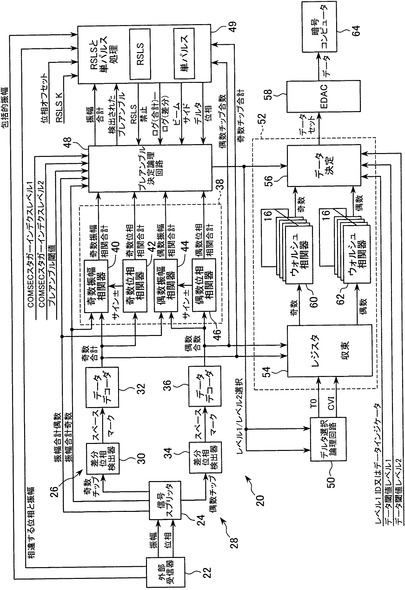
【図2】
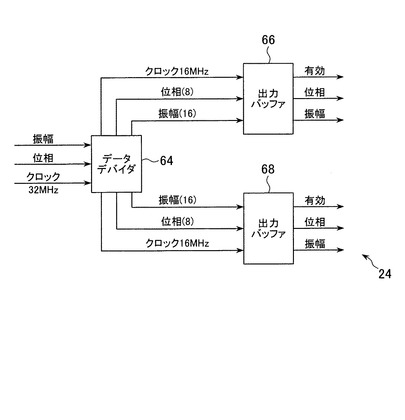
【図3】
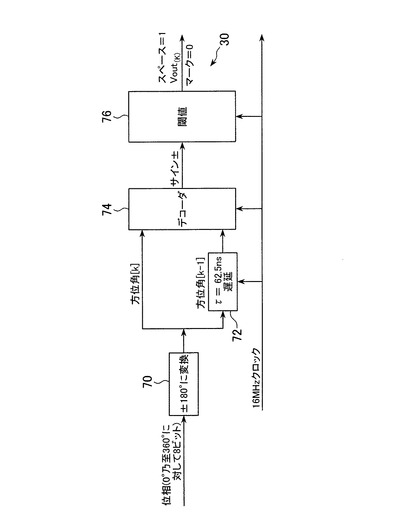
【図4】

【図5】

【図6】
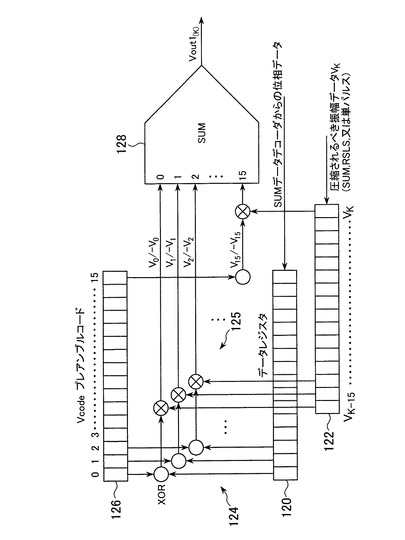
【図7】
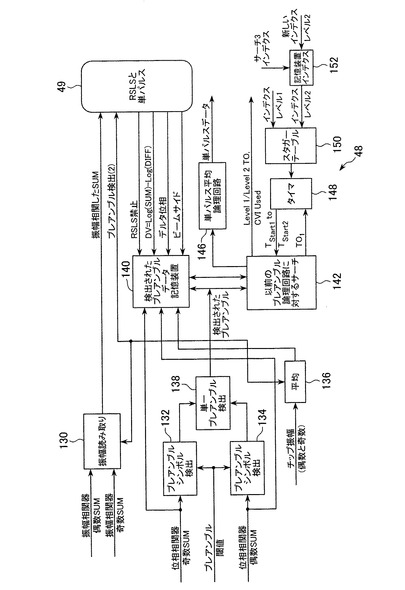
【図8】
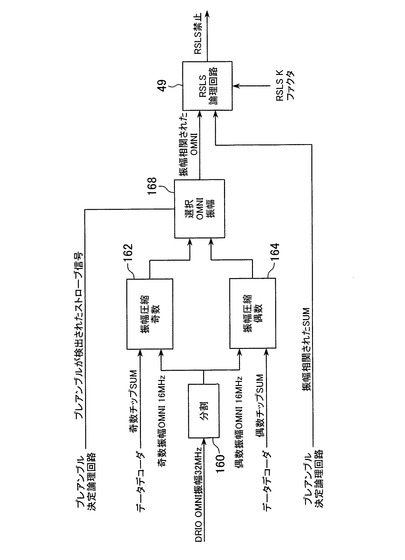
【図9】
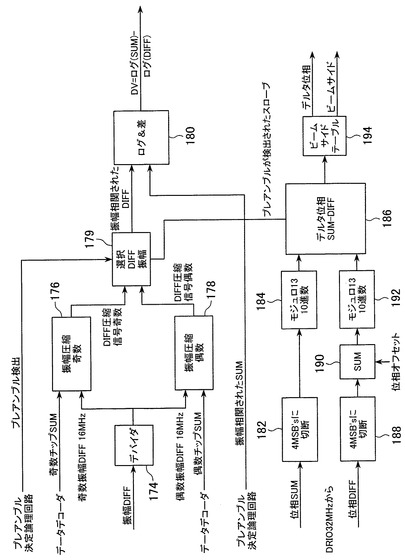
【図10】

【図11】
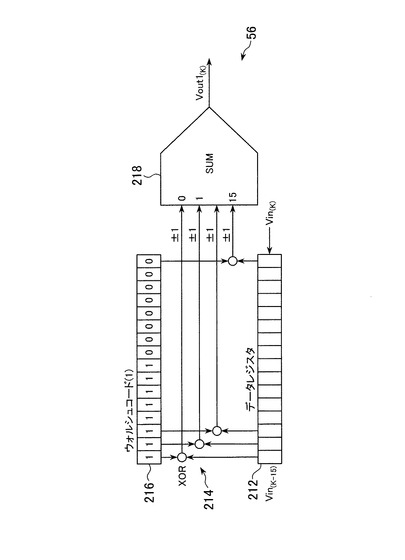
【図12】
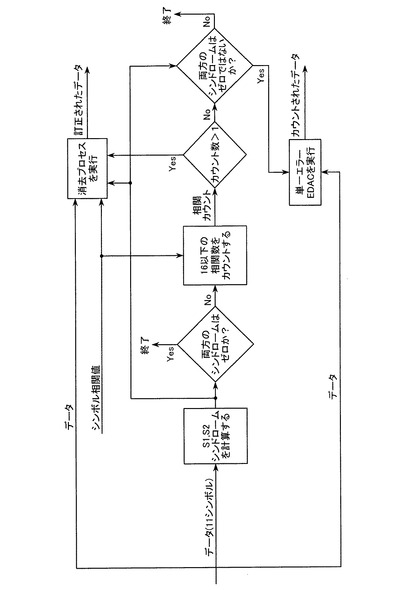
【図13】
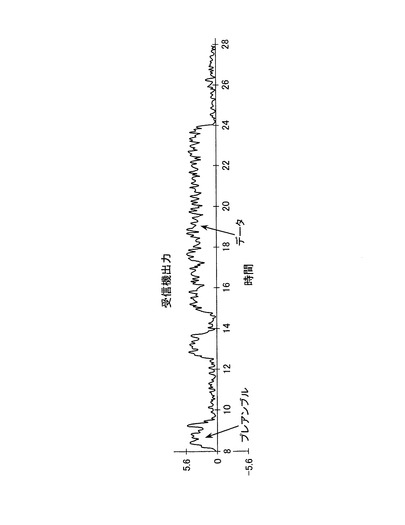
【図14】
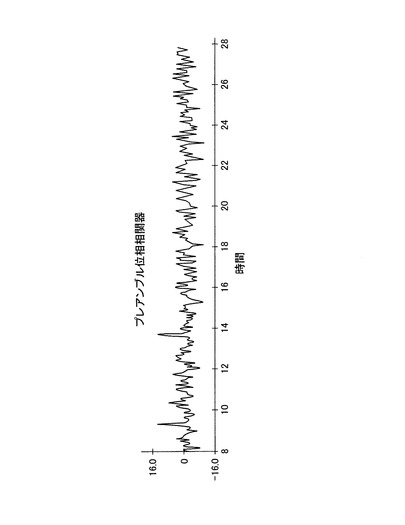
【図15】

【図16】
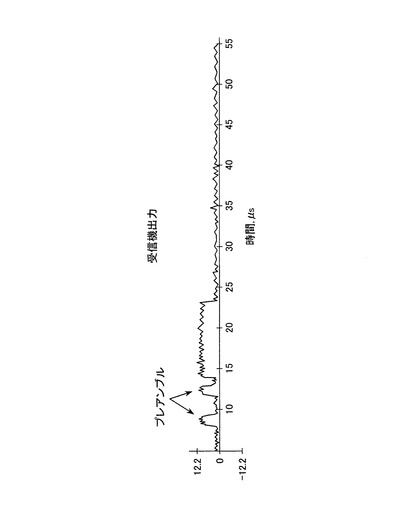
【図17】
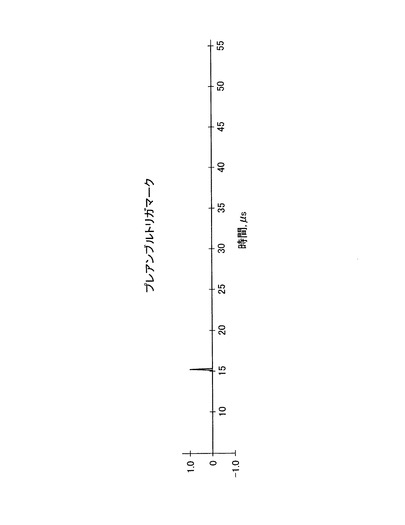
【図18】
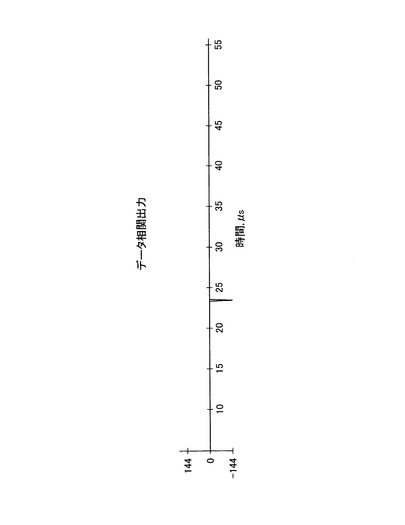
【図19】

【図20】

【図21】
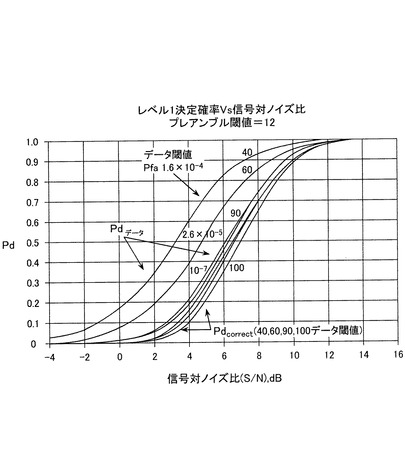
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2011−242398(P2011−242398A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2011−112292(P2011−112292)
【出願日】平成23年5月19日(2011.5.19)
【出願人】(507408316)ノースロップ グラマン ガイダンス アンド エレクトロニクス カンパニー,インコーポレーテッド (8)
【氏名又は名称原語表記】NORTHROP GRUMMAN GUIDANCE AND ELECTRONICS COMPANY, INC.
【住所又は居所原語表記】1840 Century Park East, Los Angeles, CA 90067−2101, U.S.A.
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成23年5月19日(2011.5.19)
【出願人】(507408316)ノースロップ グラマン ガイダンス アンド エレクトロニクス カンパニー,インコーポレーテッド (8)
【氏名又は名称原語表記】NORTHROP GRUMMAN GUIDANCE AND ELECTRONICS COMPANY, INC.
【住所又は居所原語表記】1840 Century Park East, Los Angeles, CA 90067−2101, U.S.A.
【Fターム(参考)】
[ Back to top ]