
位置センサ
【課題】ロータリィトランスを不要とすることでセンサの小型化を可能とした位置センサを提供すること。
【解決手段】ステータコイル12が、所定のピッチPでジグザグに折り返された導体パターンであること、ステータコイル12と直列に接続された容量素子であるコンデンサ22を有すること、ロータコイル14が、ステータコイル12と隙間を介して対向して配置され、所定のピッチPで短絡されたショートコイルであること、ステータコイル12にコンデンサ22を介して供給される励磁信号(周波数をNMHzとする。)を出力する励磁信号出力回路を有すること、ステータコイル12の出力電圧の変化に基づいて、所定のピッチP分、ロータ可動板13が移動したことを検出する移動検出手段31、32、33、34、35を有すること、を特徴とする。
【解決手段】ステータコイル12が、所定のピッチPでジグザグに折り返された導体パターンであること、ステータコイル12と直列に接続された容量素子であるコンデンサ22を有すること、ロータコイル14が、ステータコイル12と隙間を介して対向して配置され、所定のピッチPで短絡されたショートコイルであること、ステータコイル12にコンデンサ22を介して供給される励磁信号(周波数をNMHzとする。)を出力する励磁信号出力回路を有すること、ステータコイル12の出力電圧の変化に基づいて、所定のピッチP分、ロータ可動板13が移動したことを検出する移動検出手段31、32、33、34、35を有すること、を特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、可動体の動作位置を検出するために使用される位置センサに関する。
【背景技術】
【0002】
従来、この種の技術として、例えば、各分野で広く用いられている回転角センサを挙げることができる。自動車用エンジンでは、その回転速度や回転位相を検出するために、回転角センサの一つであるクランク角センサが採用されている。
【0003】
この種の技術として、例えば、下記の特許文献1に記載されたロータリー形スケールが知られている。このスケールは、互いに対向して配置されたロータとステータとを備える。ロータには、ロータ側コイルパターン(サーチコイル)が設けられ、ステータには、サーチコイルと向かい合わせになるように対向して配置されたステータ側コイルパターン(励磁コイル)が設けられる。また、ロータには、ロータ側ロータリートランスが設けられ、ステータには、ロータ側ロータリートランスと向かい合わせになるようにステータ側ロータリートランスが設けられる。ロータは、例えば、モータ等の回転軸上に取り付けられて同軸と一体回転可能に設けられ、ステータは、モータ等のケースに固定される。ここで、励磁コイル及びサーチコイルは、それぞれジグザグ状に折り返され且つ全体が円環状に形成される。そして、このロータリー形スケールでは、励磁コイルに交流電流を流すことにより、励磁信号を発生させ、ロータ(サーチコイル)の回転角度に対して(すなわち励磁コイルとサーチコイルの相対位置関係の変化に応じた電磁結合度の変化に応じて)、周期的(周期=サーチコイルのパターンピッチ)に変化する誘導電圧がサーチコイルに発生する。この誘導電圧はロータ側ロータリートランスからステータ側ロータリートランスに伝達され、この誘導電圧の変化量から、ロータ(すなわちロータが結合されたモータ等の回転軸)の回転角度を検出するようになっている。
【0004】
従来のクランク角センサの分解能は、10度程度で十分であったが、近年、環境問題に関する排ガス規制に伴い、エンジンにより精確な制御が求められており、クランク角センサの分解能も、1度程度を必要とされつつある。例えば、エンジンを6000rpmの回転数で駆動しているときには、1度毎にパルスを出力しようとすると、36kHzの信号を必要とする。
【0005】
一方、本出願人は、特許文献5において、(1)300〜500kHzの高周波の励磁信号を用いて、コイルの巻線数を減らすこと、(2)レゾルバステータ平板上に励磁コイルを印刷により形成し、レゾルバロータ平板上に検出コイルを印刷により形成し、レゾルバステータ平板とレゾルバロータ平板とを対向させて配置することを提案している。これにより、レゾルバの径方向寸法を小さくすると共に、レゾルバのロータの軸心方向の長さも短くでき、モータ軸に取り付けたときに、モータ全体の大きさを小さくできる効果を奏する。
特許文献5のように、高周波の搬送波を用いて、信号波形を得ようとすると、36kHzの信号波形を得るためには、1信号当たり10個程度の搬送波を必要とするため、360kHzの搬送波を必要とする。360kHzの搬送波を用いることにより、コイルの巻き数を減らすことができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−216154号公報
【特許文献2】特開2000−292205号公報
【特許文献3】特表2001−520743号公報
【特許文献4】特開平4−276517号公報
【特許文献5】特開2008−256486号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1記載のロータリー形スケール、及び特許文献5に記載のレゾルバでは、ロータリートランスを用いているため、ロータ及びステータにロータリートランスを配置する場所が必要となり、センサの小型化が難しいという課題があった。特に、自動車用エンジンのクランク角センサは、小型化が要望されていた。
【0008】
この発明は上記事情に鑑みてなされたものであって、その目的は、ロータリートランスを不要とすることでセンサを小型化することを可能とした位置センサを提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の位置センサは、次の構成を有する。
(1)ステータコイルが形成されたステータ固定板と、ステータ固定板と隙間を介して対向しながら動作可能に設けられ、ロータコイルが形成されたロータ可動板と、を有する位置センサであって、ステータコイルが、所定のピッチでジグザグに折り返されたコイルであること、ステータコイルと直列に接続された容量素子を有すること、ロータコイルが、ステータコイルと隙間を介して対向して配置され、所定のピッチで短絡されたショートコイルであること、ステータコイルに容量素子を介して供給される励磁信号を出力する励磁信号出力回路を有すること、ステータコイルの出力電圧の変化に基づいて、所定のピッチ分、ロータ可動板が移動したことを検出する移動検出手段を有すること、を特徴とする。
【0010】
(2)(1)に記載する位置センサにおいて、前記ステータコイルに対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイルを有すること、前記移動検出手段が、前記ステータコイルの出力電圧と、前記第2ステータコイルの出力電圧の差分に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出すること、を特徴とする。
(3)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の表面に形成され、前記ロータコイルが、ロータ可動板の表面に形成されていること、を特徴とする。
【0011】
(4)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の内周表面に形成され、前記ロータコイルが、ロータ可動板の外周表面に形成されていること、を特徴とする。
(5)(3)または(4)に記載する位置センサにおいて、前記ステータコイルが、前記ロータコイルの全周に対して、一部のみ配置されていること、を特徴とする。
【発明の効果】
【0012】
本発明は、上記構成を有することにより、次のような作用、効果を奏する。
(1)ステータコイルが形成されたステータ固定板と、前記ステータ固定板と隙間を介して対向しながら動作可能に設けられ、ロータコイルが形成されたロータ可動板と、を有する位置センサであって、(a)ステータコイルが、所定のピッチでジグザグに折り返されたコイルであること、(b)ステータコイルと直列に接続された容量素子を有すること、(c)ロータコイルが、前記ステータコイルと隙間を介して対向して配置され、所定のピッチで短絡されたショートコイルであること、(d)ステータコイルに容量素子を介して供給される励磁信号(周波数をNMHzとする。)を出力する励磁信号出力回路を有すること、(e)ステータコイルの出力電圧の変化に基づいて、所定のピッチ分、ロータ可動板が移動したことを検出する移動検出手段を有すること、特徴とするので、ステータコイルに対するショートコイルの位置が、所定のピッチの半ピッチ分ずれているときには、ステータコイルのインダクタンスは変化せず(ショートコイルの影響を受けず)、共振周波数は励磁信号の周波数(NMHz)と一致する。よって、ステータコイルの出力信号の振幅は最大となる。
【0013】
一方、上記の位置関係から、ステータコイルに対するショートコイルの位置が変化するに従い、ステータコイルのインダクタンスは、ショートコイルの影響を受けて小さくなっていき、ステータコイルとショートコイルの位置が一致するときには、ステータコイルのインダクタンスは最小となり、このとき、共振周波数と励磁信号の周波数のずれが最大となる。したがって、ステータの出力信号の振幅は最小となる。このステータの出力電圧(振幅)の変化に基づいて、移動検出手段は所定ピッチ分、ロータの可動板が移動したことを検出できる。
例えば、クランク軸の角度センサの場合には、ステータコイルのジグザグ(九十九折り)のピッチを1度とし、ショートコイルのピッチを1度としておけば、ロータの可動板がステータ固定板に対して、1度ずれる毎に、パルス信号を出力することができ、それをエンジン制御手段に送信することができる。
【0014】
すなわち、ステータコイルに対するショートコイルの位置が、所定のピッチの半ピッチ分ずれているとき、例えば、ショートコイルに隣り合う2つのステータコイル(A,B)の半分ずつが対向しているときには、ステータコイル(A)により発生しショートコイル内を通過する磁束GXAと、ステータコイル(B)により発生しショートコイルを通過する磁束GXBとは、逆向きの磁束で同じ量の磁束であり、ショートコイルを通過する磁束は実質的にゼロとなり、ショートコイルに起電力は発生しない。したがって、磁束GXAと磁束GXBを打ち消すような磁束は発生せず、インダクタンスの低下はない。よって、共振周波数は、励磁信号の周波数(NMHz)と同じである。
一方、ステータコイルとショートコイルの位置が一致しているときには、ステータコイルで発生する磁束GXにより、ショートコイルに起電力が発生し、起電力により発生した電流により、磁束GXとは逆向きの磁束GYが発生する。磁束GYの発生により、磁束GXが弱められ、その結果ステータコイルのインダクタンスは最小となり、共振周波数は最大となり、このとき共振周波数と励磁信号の周波数(NMHz)のずれは最大となる。
【0015】
ステータコイルの出力電圧は、励磁周波数(NMHz)における出力波形の振幅であり、共振周波数が変化していなければ、最大振幅Hとなるのに対して、共振周波数が高くなった場合には、励磁周波数(NMHz)における出力波形の振幅Haは最大振幅Hと比較して明らかに小さくなる。したがって、ステータコイルの出力電圧(振幅)の低下を検出することにより、共振周波数の変化を検出し、それにより、インダクタンスの変化、つまりロータ可動板の移動を検出することができる。
【0016】
(2)(1)に記載する位置センサにおいて、前記ステータコイルに対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイルを有すること、前記移動検出手段が、前記ステータコイル(第1ステータコイル)の出力電圧と、前記第2ステータコイルの出力電圧の差分に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出すること、を特徴とするので、例えば、ステータ固定板とロータ可動板との隙間の変動により、共振周波数の振幅の変化に誤差が生じた場合でも、誤差をキャンセルすることができる。
すなわち、第1ステータコイルで検出する第1電圧信号と、第2ステータコイルで検出する第2電圧信号に対しては、例えば、ステータ固定板とロータ可動板との隙間の変動の誤差は、等しく加減算される。したがって、同じタイミングにおいて、第1電圧信号と第2電圧信号との差分を算出することにより、発生した誤差をキャンセルすることができる。
【0017】
(3)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の表面に形成され、前記ロータコイルが、ロータ可動板の表面に形成されていること、を特徴とするので、位置センサの軸心方向における寸法を小さくすることができる。
(4)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の内周表面に形成され、前記ロータコイルが、ロータ可動板の外周表面に形成されていること、を特徴とするので、位置センサの径方向における寸法を小さくすることができる。また、(3)と比較して、ステータコイルとショートコイルの位置関係の精度を保つことが容易であり、製造コストを低減できる。
(5)(3)または(4)に記載する位置センサにおいて、前記ステータコイルが、前記ロータコイルの全周に対して、一部のみ配置されていること、を特徴とするので、全周に設けた場合と比較して、取り付け箇所が限られている場合にも、適用可能となる。
【図面の簡単な説明】
【0018】
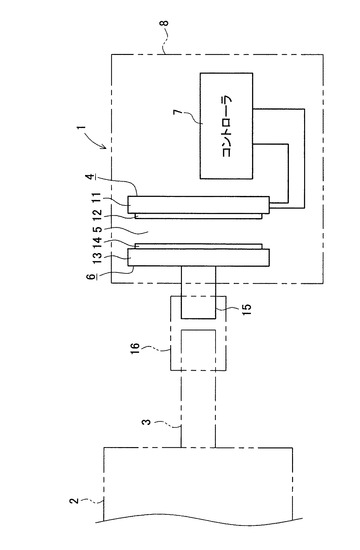
【図1】本実施の形態のロータリーエンコーダ1の構成を示す図である。
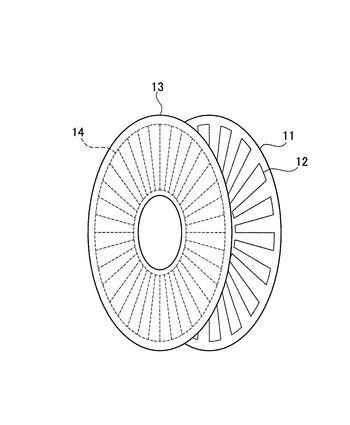
【図2】ロータコイル14とステータコイル12の関係を示す斜視図である。
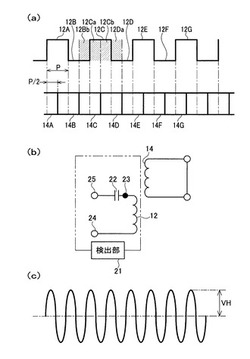
【図3】ステータコイル12の導体パターンと、ロータコイル14のショートコイルの位置が、所定のピッチの半ピッチ分ずれているときの説明図である。
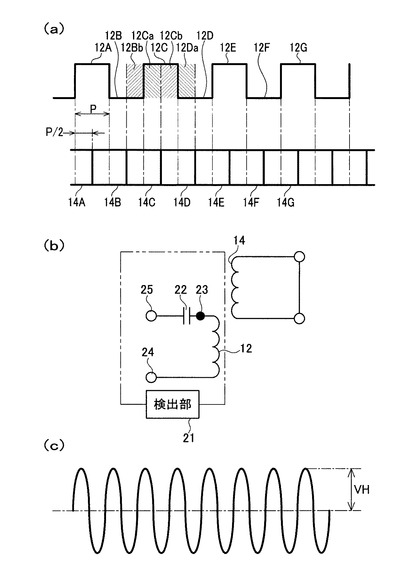
【図4】ステータコイル12の導体パターンと、ロータコイル14のショートコイルの位置が、一致しているときの説明図である。
【図5】共振周波数と出力電圧との関係を示す図である。
【図6】ロータリーエンコーダ1の制御装置を示すブロック図である。
【図7】ステータコイル12の導体パターンの構成を示す図である。
【図8】ロータコイル14のショートコイルの構成を示す図である。
【図9】第2実施の形態の第1説明図である。
【図10】第2実施の形態の第2説明図である。
【図11】第2実施の形態のロータリーエンコーダ1の制御装置を示すブロック図である。
【図12】第1変形例の構成を示す斜視図である。
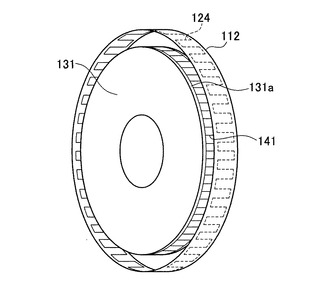
【図13】第2変形例の構成を示す斜視図である。
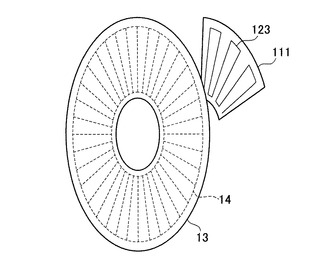
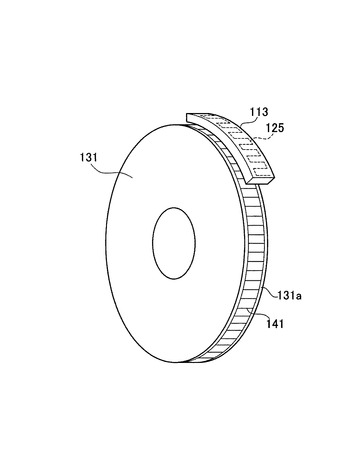
【図14】第3変形例の構成を示す斜視図である。
【発明を実施するための形態】
【0019】
以下、この発明の位置センサを「クランク軸の回転角センサであるロータリーエンコーダ」に具体化した第1実施形態につき図面を参照して詳細に説明する。
図1に、本実施の形態のロータリーエンコーダ1を概略構成図により示す。ロータリーエンコーダ1は、一例として、エンジン2のクランクシャフト3の端部に接続して設けられ、クランクシャフト3の動作位置(回転角度)を検出するために使用される。ロータリーエンコーダ1は、ステータ4と、ステータ4と隙間5を介して対向しながら回転可能に設けられるロータ6と、コントローラ7と、これらの部品4,6,7を収容するハウジング8とを備える。ステータ4は、本発明のステータ固定板としてのステータ平板11と、ステータ平板11のロータ6との対向面側に設けられるステータコイル12とを含む。ロータ6は、本発明のロータ可動板としてのロータ平板13と、ロータ平板13のステータ4との対向面側に設けられるロータコイル14とを含む。
【0020】
ステータ平板11及びロータ平板13は、互いにほぼ同じ大きさの円板形状に形成される。ステータ平板11を含むステータ4はハウジング8に固定され、ロータ平板13を含むロータ6はハウジング8に回転可能に支持される。ロータ平板13には、ロータコイル14が設けられる側面と反対の側面の中央に入力軸15が一体に設けられる。この入力軸15がハウジング8から突出して設けられる。入力軸15は、カップリング16を介してクランクシャフト3に連結される。
【0021】
図2に、1度周期のパルス列を出力する場合の、ロータコイル14とステータコイル12の関係を斜視図により示す。ロータコイル14は、梯子形状のショートコイルを形成している。ショートコイルは、円周方向に、1度に1箇所ずつ計360個形成されている。本実施例では、例えば、ステータ固定板11、及びロータ可動板13の円板の外形寸法を70mmとしている。円板の外周近くには、約0.6mmピッチでショートコイルが形成されている。図2では、細かくなり見にくくなるので、個数を省略して記載している。図8に、ロータ可動板13の表面に形成されたロータコイル14の構成を示す。梯子状のショートコイルが360個形成されている。
ショートコイルは、例えば、導電性インクをロータ可動板13上にインクジェットプリンタにより描画して、乾燥固定することにより形成される。または、半導体製造工程で用いられているエッチング等により微細線パターンを形成し貼り付けても良い。または、プレス成形により打ち抜いたパターンを貼り付けても良い。
【0022】
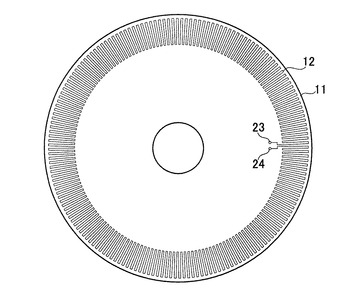
一方、図2に示すように、ステータコイル12は、ロータコイル14のショートコイルと同じピッチ(約0.6mm)でジグザグに360回折り返された導体パターンにより、ステータ固定板11の円板の外周近くに形成される。図2では、細かくなり見にくくなるので、個数を省略して記載している。図7に、ステータ固定板11の表面に形成されたステータコイル12の導体パターンの構成を示す。全周で180組のジグザグ、すなわち、180個の外周側部分と、180個の内周側部分の計360個の径方向パターンを備えている。ステータコイル12は、端子部24、23を備えている。端子24、23からの接続は記載を省略している。
本実施例では、ステータコイル12のジグザグの導体パターンの径方向の長さ、線の太さは、ロータコイル14のショートコイルと同じである。導体パターンとショートコイルとで相違しているのは、ショートコイルが環状であるのに対して、導体はターンがジグザグで外側の辺が交互に存在しない点のみである。すなわち、ステータコイル12とロータコイル14とは、ステータコイル12がジグザグ(九十九折り状)に形成されているのに対して、ロータコイル14がショートコイルとして環状に形成されている点を除いては、数も同数であり、寸法も同じであり、位置も同じである。ステータコイル12の製造方法は、ロータコイル14と同じである。
ただし、ステータコイル12のジグザグの導体パターンの太さは、ロータコイル14のショートコイルの線の太さと異なっても良い。また、ステータコイル12のジグザグの導体パターンの径方向の長さは、ロータコイル14のショートコイルの径方向の長さと同じでも良いし、長くても良く、また、短くても良い。
本実施例のステータコイル12、及びロータコイル14を用いることにより、ロータリートランスを必要としないため、ロータリーエンコーダ1の径方向の寸法を小型化できる。
【0023】
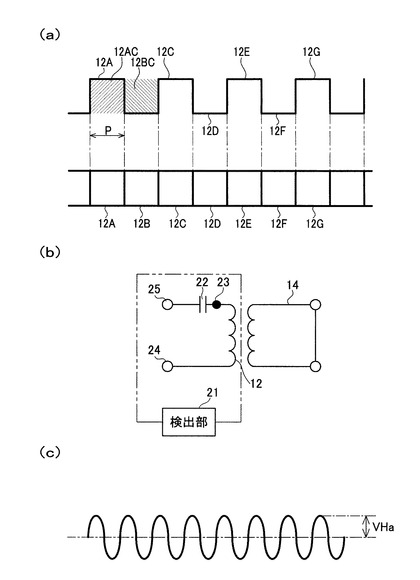
次に、測定の原理を説明する。図3(a)にステータコイル12のジグザグに形成された導体パターン12A、12B、12C、12D、12E、12F、12Gを示す。また、ロータコイル14の環状に形成されたショートコイル14A、14B、14C、14D、14E、14F、14Gを示す。導体パターン12A、12B、・・・のジグザグの外周の1辺の長さは、円周において、中心角が1度に対応する長さで形成されている。ショートコイル14A、14B・・・も同様に、円周において、中心角が1度に対応する長さで形成されている。
図3(a)では、ステータコイル12の導体パターン12A、12B、・・・に対するロータコイル14のショートコイル14A、14B・・・の位置が、所定のピッチPの半ピッチ分P/2ずれているときを示している。例えば、ショートコイル14Cに対して、隣り合う2つの導体パターン(12B,12C)の半分ずつ、つまり導体パターン12Bの後半分12Bb、導体パターン12Cの前半分12Caが対向している。
【0024】
このときには、導体パターン12Bと導体パターン12Cとでは、発生する磁束の方向が反対向きである。
すなわち、導体パターン12Bbにより発生しショートコイル14C内を通過する磁束G(12Bb)と、導体パターン12Caにより発生しショートコイル14C内を通過する磁束G(12Ca)とは、逆向きの磁束で同じ量の磁束であり、ショートコイル14Cを通過する磁束は実質的にゼロとなり、ショートコイル14Cに起電力は発生しない。
同様に、導体パターン12Cbにより発生しショートコイル14D内を通過する磁束G(12Cb)と、導体パターン12Daにより発生しショートコイル14D内を通過する磁束G(12Da)とは、逆向きの磁束で同じ量の磁束であり、ショートコイル14Dを通過する磁束は実質的にゼロとなり、ショートコイル14Dに起電力は発生しない。
同様に、ロータコイル14の全てのショートコイル14A、14B、・・・において、起電力が発生しない。
したがって、ステータコイル12の全ての導体パターン12A、12B、・・・が発生する磁束Gを打ち消すような磁束は発生せず、インダクタンスの低下はない。よって、共振周波数は、励磁信号の周波数(NMHz)と同じである。
【0025】
図3(b)に、(a)の等価回路を示す。検出部21には、電極端子24、25に直列に接続されたステータコイル12と容量素子であるコンデンサ22がある。コンデンサ22とステータコイル12との間の端子23に図示しない電圧計が接続されている。一方、ロータコイル14は、ステータコイル12に対して、移動可能に保持されている。
電極端子24、25に励磁信号が供給される。本実施例では、励磁信号として、0.65MHz(650kHz)の励磁信号を供給している。
図3(c)に、端子23で検出したステータコイルの出力電圧の波形を示す。
【0026】
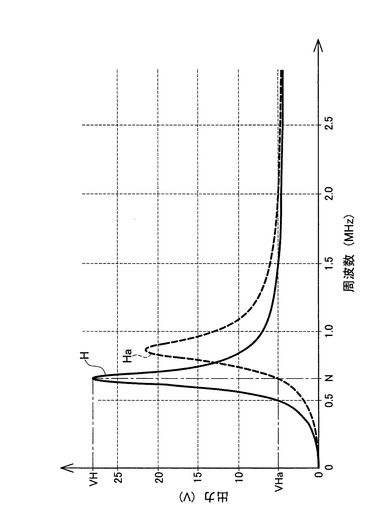
図5に、共振周波数と出力電圧との関係を示す。横軸が共振周波数(単位MHz)であり、縦軸が出力電圧(単位V)である。
図中Nは、励磁信号の周波数0.65MHz(650kHz)を示している。図3(a)に示すように、ステータコイル12の導体パターン12A、12B、・・・に対するロータコイル14のショートコイル14A、14B・・・の位置が、所定のピッチPの半ピッチ分P/2ずれているときには、ステータコイル12の全ての導体パターン12A、12B、・・・が発生する磁束Gを打ち消すような磁束は発生せず、インダクタンスの低下はない。よって、共振周波数は、励磁信号の周波数(NMHz)と同じである。
すなわち、共振周波数は、インダクタンスLの関数であり、Lが小さくなると共振周波数は大きくなり、Lが大きくなると共振周波数は小さくなる。
このときには、ステータコイル12の出力電圧は、VHと最大値である。
【0027】
次に、ロータ可動板13が、ステータ固定板11に対して、P/2だけ回転した場合を説明する。
図4(a)にステータコイル12のジグザグに形成された導体パターン12A、12B、12C、12D、12E、12F、12Gを示す。また、ロータコイル14の環状に形成されたショートコイル14A、14B、14C、14D、14E、14F、14Gを示す。
図4(a)では、ステータコイル12の導体パターンに対するロータコイル14のショートコイルの位置が、一致しているときを示している。例えば、ショートコイル14Aに対して、導体パターン12Aが一致し、ショートコイル14Bに対して、導体パターン14Bが一致している。
図4(a)に示すように、ステータコイル12の導体パターン12A、12B、・・・と、ロータコイル14のショートコイル14A、14B、・・・の位置が一致しているときには、ステータコイル12の導体パターン12A、12B、・・・で発生する磁束GXにより、ショートコイル14A、14B、・・・に起電力が発生し、起電力により発生した電流により、磁束GXとは逆向きの磁束GYが発生する。磁束GYの発生により、磁束GXが弱められ、その結果ステータコイル12のインダクタンスは最小となり、共振周波数は最大となり、このとき共振周波数と励磁信号の周波数(NMHz)のずれは最大となる。
【0028】
図3と同様に、図4(b)は、(a)の等価回路である。図4(c)に、ポイント23で検出した出力電圧の波形を示す。
図4(a)に示すように、ステータコイル12の導体パターン12A、12B、・・・に対するロータコイル14のショートコイル14A、14B・・・の位置が、一致しているときには、ステータコイル12の全ての導体パターン12A、12B、・・・が発生する磁束GXを打ち消すような磁束GYが発生するため、インダクタンスは大きく低下する。よって、共振周波数Haは、約0.9MHzまで大きくなり、励磁信号の共振周波数Hから大きくずれる。
これにより、励磁コイルの共振周波数NMHzにおいて、共振周波数Haが発生する出力電圧は、VHa(V)へ低下する。
図4(c)に端子23で検出したステータコイル12の電圧波形を示す。
【0029】
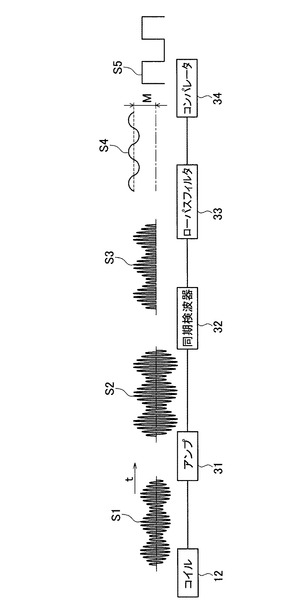
図6に、本実施の形態のロータリーエンコーダ1の制御装置をブロック図で示す。ステータコイル12は、アンプ31に接続している。アンプ31は、同期検波器32に接続している。同期検波器32は、ローパスフィルタ33に接続している。ローパスフィルタ33は、コンパレータ34に接続している。
ステータコイル12の端子23におけるステータコイル12の出力電圧S1の波形を図6に示す。励磁信号であるNMHz(0.65MHz)の搬送波に対して、信号波が重ねられている。すなわち、励磁信号は、高周波であり、図3(c)や図4(c)に示す出力電圧は、信号波として、搬送波に重ねられている。すなわち、ステータコイル12の出力電圧は、搬送波が振幅変調された信号波となっている。
アンプは、出力電圧信号S1を増幅して信号S2とする。同期検波器32は、励磁信号NMHzにより、信号S2を同期検波し、信号S3を出力する。ローパスフィルタ33は、信号S3を平滑化し、波形信号S4とする。
すなわち、同期検波器32及びローパスフィルタ33により、信号S2から、高周波である搬送波を除去して、信号波のみの波形信号S4とする。この波形信号S4を、コンパレータ34でしきい値以上か否かにより、パルス信号S5に変換する。1つのパルス信号S5が出ると、ロータ可動板13が、所定のピッチPだけ回転したことがわかる。
このパルス信号をエンジン制御装置に出力することにより、パルス信号を受けたエンジン制御装置は、クランク軸の回転角度を、1度の分解能で正確に得ることができる。
【0030】
ここで、図6のローパスフィルタ33の、出力信号S4は、出力レベルMが変動する場合がある。例えば、励磁信号の振幅が変動した場合や、ステータ固定板11とロータ可動板13の隙間が微小量変化したような場合である。ここで、コンパレータ34で、しきい値でパルス化しているため、出力レベルMの変動に応じて、しきい値を調整する必要があり、しきい値が最適でなければ、コンパレータ34でのパルス化に誤差が生じ、正確に角度検出を行えない恐れがある。
第2の実施の形態では、その問題を解決している。第2の実施の形態の構成は、第1の実施の形態とほとんど同じであるので、相違する点のみ詳細に説明し、同じ部分については、説明を割愛する。
図9及び図10に、第2の実施の形態のロータコイル14、及びステータコイル121、122を示す。ロータコイル14は、第1の実施の形態と同じである。
第1の実施の形態では、ステータコイル12は1つであったが、第2の実施の形態では、ステータコイル121、ステータコイル122と2つのステータコイルを備えている。各ステータコイル121、122の形状、大きさは、第1実施の形態と同じである。ステータコイル121とステータコイル122とは、図9、図10に示すように、半ピッチP/2ずれて形成されている。
【0031】
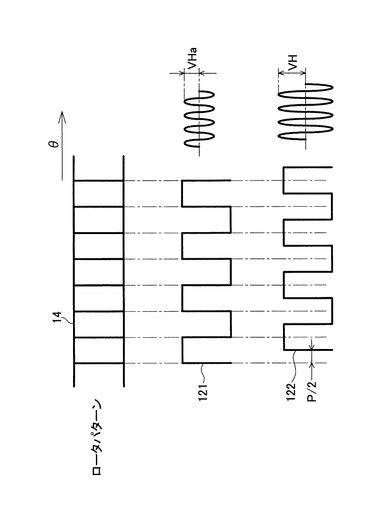
図9は、ステータコイル121の導体パターンが、ロータコイル14のショートコイルと一致している場合を示している。このとき、ステータコイル122の導体パターンは、ロータコイル14のショートコイルと半ピッチP/2ずれている。
この状態では、図に示すように、ステータコイル121の出力電圧は最大値VHであり、ステータコイル122の出力電圧は最小値VHaである。
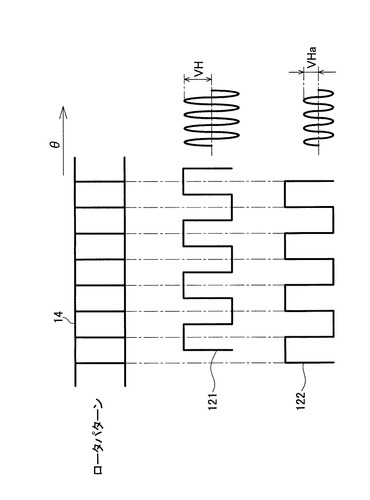
図10は、ステータコイル121の導体パターンが、ロータコイル14のショートコイルと半ピッチP/2ずれている場合を示している。このとき、ステータコイル122の導体パターンは、ロータコイル14のショートコイルと一致している。
この状態では、図に示すように、ステータコイル121の出力電圧は最小値VHaであり、ステータコイル122の出力電圧は最大値VHである。
【0032】
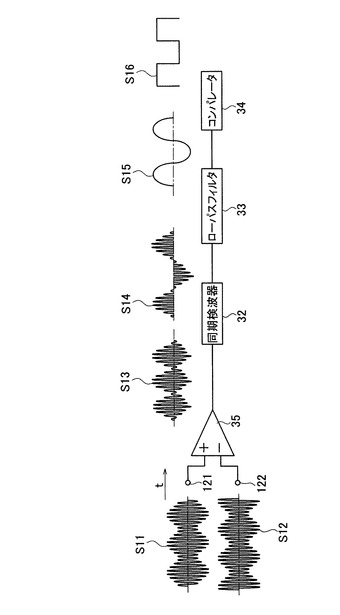
図11に、第2の実施の形態のロータリーエンコーダ1の制御装置をブロック図で示す。ステータコイル121は、差動アンプ35のプラス端子に接続している。ステータコイル122は、差動アンプ35のマイナス端子に接続している。差動アンプ35は、同期検波器32に接続している。同期検波器32は、ローパスフィルタ33に接続している。ローパスフィルタ33は、コンパレータ34に接続している。
ステータコイル121のポイント23における出力電圧S11の波形、及びステータコイル122のポイント23における出力電圧S12の波形を図9に示す。励磁信号であるNMHz(0.65MHz)の搬送波に対して、信号波が重ねられている。すなわち、励磁信号は、高周波であり、ステータコイル121、122の出力電圧は、信号波として、搬送波に重ねられている。すなわち、ステータコイル121、122の出力電圧は、搬送波が振幅変調された信号波となっている。
【0033】
差動アンプ35は、ステータコイル121の出力電圧と、ステータコイル122の出力電圧との差分を算出して、信号S13として出力する。同期検波器32は、励磁信号NMHzにより、信号S13を同期検波し、信号S14を出力する。ローパスフィルタ33は、信号S14を平滑化し、波形信号S15を出力する。
すなわち、同期検波器32及びローパスフィルタ33により、信号S13から、高周波である搬送波を除去して、信号波のみの波形信号S15とする。この波形信号S15を、コンパレータ34でしきい値以上か否かにより、パルス信号S16に変換する。1つのパルス信号S16が出ると、ロータ可動板13が、所定のピッチPだけ回転したことがわかる。
このパルス信号をエンジン制御装置に出力することにより、パルス信号を受けたエンジン制御装置は、クランク軸の回転角度を、1度の分解能で正確に得ることができる。
【0034】
以上詳細に説明したように、第1、及び第2の実施の形態のロータリーエンコーダ1によれば、次のような効果を得ることができる。
ステータコイル12が形成されたステータ固定板11と、ステータ固定板11と隙間を介して対向しながら動作可能に設けられ、ロータコイル14が形成されたロータ可動板13と、を有するロータリーエンコーダ1であって、(a)ステータコイル12が、所定のピッチPでジグザグに折り返された導体パターンであること、(b)ステータコイル12と直列に接続された容量素子であるコンデンサ22を有すること、(c)ロータコイル14が、ステータコイル12と隙間を介して対向して配置され、所定のピッチPで短絡されたショートコイルであること、(d)ステータコイル12にコンデンサ22を介して供給される励磁信号(周波数をNMHzとする。)を出力する励磁信号出力回路を有すること、(e)ステータコイル12の出力電圧の変化に基づいて、所定のピッチP分、ロータ可動板13が移動したことを検出する移動検出手段31、32、33、34、35を有すること、を特徴とするので、ステータコイル12の導体パターンに対するロータコイル14のショートコイルの位置が、所定のピッチPの半ピッチ分P/2ずれているときには、ステータコイル12のインダクタンスは変化せず(ショートコイルの影響を受けず)、共振周波数は励磁信号の周波数(NMHz)と一致する。よって、ステータコイルの出力信号の振幅は最大となる。
【0035】
一方、上記の位置関係から、ステータコイル12の導体パターンに対するロータコイル14のショートコイルの位置が変化するに従い、ステータコイル12のインダクタンスは、ロータコイル14のショートコイルの影響を受けて小さくなっていき、ステータコイル12の導体パターンと、ロータコイル14のショートコイルの位置が一致するときには、ステータコイル12のインダクタンスは最小となり、このとき、共振周波数と励磁信号の周波数(NMHz)のずれが最大となる。したがって、ステータコイル12の出力信号の振幅は最小となる。このステータコイル12の出力電圧(振幅)の変化に基づいて、移動検出手段は所定ピッチP分、ロータ可動板13が回転したことを検出できる。
例えば、クランク軸の角度センサの場合には、ステータコイル12のジグザグ(九十九折り)のピッチを1度とし、ショートコイルのピッチを1度としておけば、ロータの可動板がステータ固定板に対して、1度ずれる毎に、パルス信号を出力することができ、それをエンジン制御手段に送信することができる。
【0036】
また、第1ステータコイル121に対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイル122を有すること、移動検出手段31、32、33、4、35が、第1ステータコイル121の出力電圧と、第2ステータコイル122の出力電圧の差分に基づいて、所定のピッチ分P、ロータ可動板13が回転したことを検出すること、を特徴とするので、例えば、ステータ固定板11とロータ可動板13との隙間の変動により、共振周波数の振幅の変化に誤差が生じた場合でも、誤差をキャンセルすることができる。
すなわち、第1ステータコイル121で検出する第1電圧信号と、第2ステータコイル122で検出する第2電圧信号に対しては、例えば、ステータ固定板11とロータ可動板13との隙間の変動の誤差は、等しく加減算される。したがって、同じタイミングにおいて、第1電圧信号と第2電圧信号との差分を算出することにより、発生した誤差をキャンセルすることができる。
また、ステータコイル12が、ステータ固定板11の表面に形成され、ロータコイル14が、ロータ可動板13の表面に形成されていること、を特徴とするので、ロータリーエンコーダ1の軸心方向における寸法を小さくすることができる。
【0037】
次に、ステータコイル12と、ロータコイル14の構成の変形例を説明する。これらの変形例については、第1実施の形態及び第2の実施の形態において、これから説明する構成のみを変形させれば、実施可能であるので、相違する点のみ説明し、重複する部分については説明を割愛する。
図12に第1変形例を示す。ロータ可動板13とロータコイル14とは、第1実施の形態または第2の実施の形態と同じである。ステータ固定板111、及びその上に形成されるステータコア123が、第1実施の形態または第2の実施の形態のステータ固定板11の、円周方向に8等分されたものの1つである。
第1の変形例によれば、ステータコイル12が、ロータコイル14の全周に対して、一部のみ配置されていること、を特徴とするので、全周に設けた場合と比較して、出力が低下し、S/N比が悪くなるが、取り付け箇所が限られている場合にも、適用可能となる。
【0038】
図13に第2の変形例を示す。ロータ可動板13の外周表面131aに、ロータコイル141が形成されている。また、ステータ固定板112の内周面に、ステータコイル124が形成されている。
第2変形例によれば、ステータコイル124が、ステータ固定板112の内周表面に形成され、ロータコイル141が、ロータ可動板131の外周表面131aに形成されていること、を特徴とするので、位置センサの径方向における寸法を小さくすることができる。また、第1または第2実施の形態と比較して、ステータコイル124の導体パターンと、ロータコイル141のショートコイルの位置関係の精度を保つことが容易であり、製造コストを低減できる。
図14に第3の変形例を示す。ロータ可動板131とロータコイル141とは、第2変形例と同じである。ステータ固定板113、及びその上に形成されるステータコア125が、第2変形例のステータ固定板112の、円周方向に8等分されたものの1つである。
第3の変形例によれば、ステータコイル125が、ロータコイル141の全周に対して、一部のみ配置されていること、を特徴とするので、全周に設けた場合と比較して、取り付け箇所が限られている場合にも、適用可能となる。
【0039】
なお、この発明は前記各実施形態に限定されるものではなく、発明の趣旨を逸脱することのない範囲で構成の一部を適宜に変更して実施することもできる。
本実施の形態では、ステータコイル12の導体パターンと、ロータコイル14のショートコイルのピッチを中心角で1度となるように形成したが、コストはかかるが、精度の高い製造法を用いて、より細密な導体パターン、ショートコイルを形成して、分解能を向上させても良い。
本実施の形態では、角度検出用のセンサについて説明したが、ステータコイル12の導体パターン、及びロータコイル14のショートコイルを直線状に形成することにより、直線の位置センサを形成することができる。
【符号の説明】
【0040】
1 ロータリーエンコーダ
11 ステータ固定板
12 ステータコイル
13 ロータ可動板
14 ロータコイル
22 コンデンサ
31 アンプ
32 同期検波器
33 ローパスフィルタ
34 コンパレータ
35 差動アンプ
【技術分野】
【0001】
この発明は、可動体の動作位置を検出するために使用される位置センサに関する。
【背景技術】
【0002】
従来、この種の技術として、例えば、各分野で広く用いられている回転角センサを挙げることができる。自動車用エンジンでは、その回転速度や回転位相を検出するために、回転角センサの一つであるクランク角センサが採用されている。
【0003】
この種の技術として、例えば、下記の特許文献1に記載されたロータリー形スケールが知られている。このスケールは、互いに対向して配置されたロータとステータとを備える。ロータには、ロータ側コイルパターン(サーチコイル)が設けられ、ステータには、サーチコイルと向かい合わせになるように対向して配置されたステータ側コイルパターン(励磁コイル)が設けられる。また、ロータには、ロータ側ロータリートランスが設けられ、ステータには、ロータ側ロータリートランスと向かい合わせになるようにステータ側ロータリートランスが設けられる。ロータは、例えば、モータ等の回転軸上に取り付けられて同軸と一体回転可能に設けられ、ステータは、モータ等のケースに固定される。ここで、励磁コイル及びサーチコイルは、それぞれジグザグ状に折り返され且つ全体が円環状に形成される。そして、このロータリー形スケールでは、励磁コイルに交流電流を流すことにより、励磁信号を発生させ、ロータ(サーチコイル)の回転角度に対して(すなわち励磁コイルとサーチコイルの相対位置関係の変化に応じた電磁結合度の変化に応じて)、周期的(周期=サーチコイルのパターンピッチ)に変化する誘導電圧がサーチコイルに発生する。この誘導電圧はロータ側ロータリートランスからステータ側ロータリートランスに伝達され、この誘導電圧の変化量から、ロータ(すなわちロータが結合されたモータ等の回転軸)の回転角度を検出するようになっている。
【0004】
従来のクランク角センサの分解能は、10度程度で十分であったが、近年、環境問題に関する排ガス規制に伴い、エンジンにより精確な制御が求められており、クランク角センサの分解能も、1度程度を必要とされつつある。例えば、エンジンを6000rpmの回転数で駆動しているときには、1度毎にパルスを出力しようとすると、36kHzの信号を必要とする。
【0005】
一方、本出願人は、特許文献5において、(1)300〜500kHzの高周波の励磁信号を用いて、コイルの巻線数を減らすこと、(2)レゾルバステータ平板上に励磁コイルを印刷により形成し、レゾルバロータ平板上に検出コイルを印刷により形成し、レゾルバステータ平板とレゾルバロータ平板とを対向させて配置することを提案している。これにより、レゾルバの径方向寸法を小さくすると共に、レゾルバのロータの軸心方向の長さも短くでき、モータ軸に取り付けたときに、モータ全体の大きさを小さくできる効果を奏する。
特許文献5のように、高周波の搬送波を用いて、信号波形を得ようとすると、36kHzの信号波形を得るためには、1信号当たり10個程度の搬送波を必要とするため、360kHzの搬送波を必要とする。360kHzの搬送波を用いることにより、コイルの巻き数を減らすことができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−216154号公報
【特許文献2】特開2000−292205号公報
【特許文献3】特表2001−520743号公報
【特許文献4】特開平4−276517号公報
【特許文献5】特開2008−256486号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1記載のロータリー形スケール、及び特許文献5に記載のレゾルバでは、ロータリートランスを用いているため、ロータ及びステータにロータリートランスを配置する場所が必要となり、センサの小型化が難しいという課題があった。特に、自動車用エンジンのクランク角センサは、小型化が要望されていた。
【0008】
この発明は上記事情に鑑みてなされたものであって、その目的は、ロータリートランスを不要とすることでセンサを小型化することを可能とした位置センサを提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の位置センサは、次の構成を有する。
(1)ステータコイルが形成されたステータ固定板と、ステータ固定板と隙間を介して対向しながら動作可能に設けられ、ロータコイルが形成されたロータ可動板と、を有する位置センサであって、ステータコイルが、所定のピッチでジグザグに折り返されたコイルであること、ステータコイルと直列に接続された容量素子を有すること、ロータコイルが、ステータコイルと隙間を介して対向して配置され、所定のピッチで短絡されたショートコイルであること、ステータコイルに容量素子を介して供給される励磁信号を出力する励磁信号出力回路を有すること、ステータコイルの出力電圧の変化に基づいて、所定のピッチ分、ロータ可動板が移動したことを検出する移動検出手段を有すること、を特徴とする。
【0010】
(2)(1)に記載する位置センサにおいて、前記ステータコイルに対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイルを有すること、前記移動検出手段が、前記ステータコイルの出力電圧と、前記第2ステータコイルの出力電圧の差分に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出すること、を特徴とする。
(3)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の表面に形成され、前記ロータコイルが、ロータ可動板の表面に形成されていること、を特徴とする。
【0011】
(4)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の内周表面に形成され、前記ロータコイルが、ロータ可動板の外周表面に形成されていること、を特徴とする。
(5)(3)または(4)に記載する位置センサにおいて、前記ステータコイルが、前記ロータコイルの全周に対して、一部のみ配置されていること、を特徴とする。
【発明の効果】
【0012】
本発明は、上記構成を有することにより、次のような作用、効果を奏する。
(1)ステータコイルが形成されたステータ固定板と、前記ステータ固定板と隙間を介して対向しながら動作可能に設けられ、ロータコイルが形成されたロータ可動板と、を有する位置センサであって、(a)ステータコイルが、所定のピッチでジグザグに折り返されたコイルであること、(b)ステータコイルと直列に接続された容量素子を有すること、(c)ロータコイルが、前記ステータコイルと隙間を介して対向して配置され、所定のピッチで短絡されたショートコイルであること、(d)ステータコイルに容量素子を介して供給される励磁信号(周波数をNMHzとする。)を出力する励磁信号出力回路を有すること、(e)ステータコイルの出力電圧の変化に基づいて、所定のピッチ分、ロータ可動板が移動したことを検出する移動検出手段を有すること、特徴とするので、ステータコイルに対するショートコイルの位置が、所定のピッチの半ピッチ分ずれているときには、ステータコイルのインダクタンスは変化せず(ショートコイルの影響を受けず)、共振周波数は励磁信号の周波数(NMHz)と一致する。よって、ステータコイルの出力信号の振幅は最大となる。
【0013】
一方、上記の位置関係から、ステータコイルに対するショートコイルの位置が変化するに従い、ステータコイルのインダクタンスは、ショートコイルの影響を受けて小さくなっていき、ステータコイルとショートコイルの位置が一致するときには、ステータコイルのインダクタンスは最小となり、このとき、共振周波数と励磁信号の周波数のずれが最大となる。したがって、ステータの出力信号の振幅は最小となる。このステータの出力電圧(振幅)の変化に基づいて、移動検出手段は所定ピッチ分、ロータの可動板が移動したことを検出できる。
例えば、クランク軸の角度センサの場合には、ステータコイルのジグザグ(九十九折り)のピッチを1度とし、ショートコイルのピッチを1度としておけば、ロータの可動板がステータ固定板に対して、1度ずれる毎に、パルス信号を出力することができ、それをエンジン制御手段に送信することができる。
【0014】
すなわち、ステータコイルに対するショートコイルの位置が、所定のピッチの半ピッチ分ずれているとき、例えば、ショートコイルに隣り合う2つのステータコイル(A,B)の半分ずつが対向しているときには、ステータコイル(A)により発生しショートコイル内を通過する磁束GXAと、ステータコイル(B)により発生しショートコイルを通過する磁束GXBとは、逆向きの磁束で同じ量の磁束であり、ショートコイルを通過する磁束は実質的にゼロとなり、ショートコイルに起電力は発生しない。したがって、磁束GXAと磁束GXBを打ち消すような磁束は発生せず、インダクタンスの低下はない。よって、共振周波数は、励磁信号の周波数(NMHz)と同じである。
一方、ステータコイルとショートコイルの位置が一致しているときには、ステータコイルで発生する磁束GXにより、ショートコイルに起電力が発生し、起電力により発生した電流により、磁束GXとは逆向きの磁束GYが発生する。磁束GYの発生により、磁束GXが弱められ、その結果ステータコイルのインダクタンスは最小となり、共振周波数は最大となり、このとき共振周波数と励磁信号の周波数(NMHz)のずれは最大となる。
【0015】
ステータコイルの出力電圧は、励磁周波数(NMHz)における出力波形の振幅であり、共振周波数が変化していなければ、最大振幅Hとなるのに対して、共振周波数が高くなった場合には、励磁周波数(NMHz)における出力波形の振幅Haは最大振幅Hと比較して明らかに小さくなる。したがって、ステータコイルの出力電圧(振幅)の低下を検出することにより、共振周波数の変化を検出し、それにより、インダクタンスの変化、つまりロータ可動板の移動を検出することができる。
【0016】
(2)(1)に記載する位置センサにおいて、前記ステータコイルに対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイルを有すること、前記移動検出手段が、前記ステータコイル(第1ステータコイル)の出力電圧と、前記第2ステータコイルの出力電圧の差分に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出すること、を特徴とするので、例えば、ステータ固定板とロータ可動板との隙間の変動により、共振周波数の振幅の変化に誤差が生じた場合でも、誤差をキャンセルすることができる。
すなわち、第1ステータコイルで検出する第1電圧信号と、第2ステータコイルで検出する第2電圧信号に対しては、例えば、ステータ固定板とロータ可動板との隙間の変動の誤差は、等しく加減算される。したがって、同じタイミングにおいて、第1電圧信号と第2電圧信号との差分を算出することにより、発生した誤差をキャンセルすることができる。
【0017】
(3)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の表面に形成され、前記ロータコイルが、ロータ可動板の表面に形成されていること、を特徴とするので、位置センサの軸心方向における寸法を小さくすることができる。
(4)(1)または(2)に記載する位置センサにおいて、前記ステータコイルが、前記ステータ固定板の内周表面に形成され、前記ロータコイルが、ロータ可動板の外周表面に形成されていること、を特徴とするので、位置センサの径方向における寸法を小さくすることができる。また、(3)と比較して、ステータコイルとショートコイルの位置関係の精度を保つことが容易であり、製造コストを低減できる。
(5)(3)または(4)に記載する位置センサにおいて、前記ステータコイルが、前記ロータコイルの全周に対して、一部のみ配置されていること、を特徴とするので、全周に設けた場合と比較して、取り付け箇所が限られている場合にも、適用可能となる。
【図面の簡単な説明】
【0018】
【図1】本実施の形態のロータリーエンコーダ1の構成を示す図である。
【図2】ロータコイル14とステータコイル12の関係を示す斜視図である。
【図3】ステータコイル12の導体パターンと、ロータコイル14のショートコイルの位置が、所定のピッチの半ピッチ分ずれているときの説明図である。
【図4】ステータコイル12の導体パターンと、ロータコイル14のショートコイルの位置が、一致しているときの説明図である。
【図5】共振周波数と出力電圧との関係を示す図である。
【図6】ロータリーエンコーダ1の制御装置を示すブロック図である。
【図7】ステータコイル12の導体パターンの構成を示す図である。
【図8】ロータコイル14のショートコイルの構成を示す図である。
【図9】第2実施の形態の第1説明図である。
【図10】第2実施の形態の第2説明図である。
【図11】第2実施の形態のロータリーエンコーダ1の制御装置を示すブロック図である。
【図12】第1変形例の構成を示す斜視図である。
【図13】第2変形例の構成を示す斜視図である。
【図14】第3変形例の構成を示す斜視図である。
【発明を実施するための形態】
【0019】
以下、この発明の位置センサを「クランク軸の回転角センサであるロータリーエンコーダ」に具体化した第1実施形態につき図面を参照して詳細に説明する。
図1に、本実施の形態のロータリーエンコーダ1を概略構成図により示す。ロータリーエンコーダ1は、一例として、エンジン2のクランクシャフト3の端部に接続して設けられ、クランクシャフト3の動作位置(回転角度)を検出するために使用される。ロータリーエンコーダ1は、ステータ4と、ステータ4と隙間5を介して対向しながら回転可能に設けられるロータ6と、コントローラ7と、これらの部品4,6,7を収容するハウジング8とを備える。ステータ4は、本発明のステータ固定板としてのステータ平板11と、ステータ平板11のロータ6との対向面側に設けられるステータコイル12とを含む。ロータ6は、本発明のロータ可動板としてのロータ平板13と、ロータ平板13のステータ4との対向面側に設けられるロータコイル14とを含む。
【0020】
ステータ平板11及びロータ平板13は、互いにほぼ同じ大きさの円板形状に形成される。ステータ平板11を含むステータ4はハウジング8に固定され、ロータ平板13を含むロータ6はハウジング8に回転可能に支持される。ロータ平板13には、ロータコイル14が設けられる側面と反対の側面の中央に入力軸15が一体に設けられる。この入力軸15がハウジング8から突出して設けられる。入力軸15は、カップリング16を介してクランクシャフト3に連結される。
【0021】
図2に、1度周期のパルス列を出力する場合の、ロータコイル14とステータコイル12の関係を斜視図により示す。ロータコイル14は、梯子形状のショートコイルを形成している。ショートコイルは、円周方向に、1度に1箇所ずつ計360個形成されている。本実施例では、例えば、ステータ固定板11、及びロータ可動板13の円板の外形寸法を70mmとしている。円板の外周近くには、約0.6mmピッチでショートコイルが形成されている。図2では、細かくなり見にくくなるので、個数を省略して記載している。図8に、ロータ可動板13の表面に形成されたロータコイル14の構成を示す。梯子状のショートコイルが360個形成されている。
ショートコイルは、例えば、導電性インクをロータ可動板13上にインクジェットプリンタにより描画して、乾燥固定することにより形成される。または、半導体製造工程で用いられているエッチング等により微細線パターンを形成し貼り付けても良い。または、プレス成形により打ち抜いたパターンを貼り付けても良い。
【0022】
一方、図2に示すように、ステータコイル12は、ロータコイル14のショートコイルと同じピッチ(約0.6mm)でジグザグに360回折り返された導体パターンにより、ステータ固定板11の円板の外周近くに形成される。図2では、細かくなり見にくくなるので、個数を省略して記載している。図7に、ステータ固定板11の表面に形成されたステータコイル12の導体パターンの構成を示す。全周で180組のジグザグ、すなわち、180個の外周側部分と、180個の内周側部分の計360個の径方向パターンを備えている。ステータコイル12は、端子部24、23を備えている。端子24、23からの接続は記載を省略している。
本実施例では、ステータコイル12のジグザグの導体パターンの径方向の長さ、線の太さは、ロータコイル14のショートコイルと同じである。導体パターンとショートコイルとで相違しているのは、ショートコイルが環状であるのに対して、導体はターンがジグザグで外側の辺が交互に存在しない点のみである。すなわち、ステータコイル12とロータコイル14とは、ステータコイル12がジグザグ(九十九折り状)に形成されているのに対して、ロータコイル14がショートコイルとして環状に形成されている点を除いては、数も同数であり、寸法も同じであり、位置も同じである。ステータコイル12の製造方法は、ロータコイル14と同じである。
ただし、ステータコイル12のジグザグの導体パターンの太さは、ロータコイル14のショートコイルの線の太さと異なっても良い。また、ステータコイル12のジグザグの導体パターンの径方向の長さは、ロータコイル14のショートコイルの径方向の長さと同じでも良いし、長くても良く、また、短くても良い。
本実施例のステータコイル12、及びロータコイル14を用いることにより、ロータリートランスを必要としないため、ロータリーエンコーダ1の径方向の寸法を小型化できる。
【0023】
次に、測定の原理を説明する。図3(a)にステータコイル12のジグザグに形成された導体パターン12A、12B、12C、12D、12E、12F、12Gを示す。また、ロータコイル14の環状に形成されたショートコイル14A、14B、14C、14D、14E、14F、14Gを示す。導体パターン12A、12B、・・・のジグザグの外周の1辺の長さは、円周において、中心角が1度に対応する長さで形成されている。ショートコイル14A、14B・・・も同様に、円周において、中心角が1度に対応する長さで形成されている。
図3(a)では、ステータコイル12の導体パターン12A、12B、・・・に対するロータコイル14のショートコイル14A、14B・・・の位置が、所定のピッチPの半ピッチ分P/2ずれているときを示している。例えば、ショートコイル14Cに対して、隣り合う2つの導体パターン(12B,12C)の半分ずつ、つまり導体パターン12Bの後半分12Bb、導体パターン12Cの前半分12Caが対向している。
【0024】
このときには、導体パターン12Bと導体パターン12Cとでは、発生する磁束の方向が反対向きである。
すなわち、導体パターン12Bbにより発生しショートコイル14C内を通過する磁束G(12Bb)と、導体パターン12Caにより発生しショートコイル14C内を通過する磁束G(12Ca)とは、逆向きの磁束で同じ量の磁束であり、ショートコイル14Cを通過する磁束は実質的にゼロとなり、ショートコイル14Cに起電力は発生しない。
同様に、導体パターン12Cbにより発生しショートコイル14D内を通過する磁束G(12Cb)と、導体パターン12Daにより発生しショートコイル14D内を通過する磁束G(12Da)とは、逆向きの磁束で同じ量の磁束であり、ショートコイル14Dを通過する磁束は実質的にゼロとなり、ショートコイル14Dに起電力は発生しない。
同様に、ロータコイル14の全てのショートコイル14A、14B、・・・において、起電力が発生しない。
したがって、ステータコイル12の全ての導体パターン12A、12B、・・・が発生する磁束Gを打ち消すような磁束は発生せず、インダクタンスの低下はない。よって、共振周波数は、励磁信号の周波数(NMHz)と同じである。
【0025】
図3(b)に、(a)の等価回路を示す。検出部21には、電極端子24、25に直列に接続されたステータコイル12と容量素子であるコンデンサ22がある。コンデンサ22とステータコイル12との間の端子23に図示しない電圧計が接続されている。一方、ロータコイル14は、ステータコイル12に対して、移動可能に保持されている。
電極端子24、25に励磁信号が供給される。本実施例では、励磁信号として、0.65MHz(650kHz)の励磁信号を供給している。
図3(c)に、端子23で検出したステータコイルの出力電圧の波形を示す。
【0026】
図5に、共振周波数と出力電圧との関係を示す。横軸が共振周波数(単位MHz)であり、縦軸が出力電圧(単位V)である。
図中Nは、励磁信号の周波数0.65MHz(650kHz)を示している。図3(a)に示すように、ステータコイル12の導体パターン12A、12B、・・・に対するロータコイル14のショートコイル14A、14B・・・の位置が、所定のピッチPの半ピッチ分P/2ずれているときには、ステータコイル12の全ての導体パターン12A、12B、・・・が発生する磁束Gを打ち消すような磁束は発生せず、インダクタンスの低下はない。よって、共振周波数は、励磁信号の周波数(NMHz)と同じである。
すなわち、共振周波数は、インダクタンスLの関数であり、Lが小さくなると共振周波数は大きくなり、Lが大きくなると共振周波数は小さくなる。
このときには、ステータコイル12の出力電圧は、VHと最大値である。
【0027】
次に、ロータ可動板13が、ステータ固定板11に対して、P/2だけ回転した場合を説明する。
図4(a)にステータコイル12のジグザグに形成された導体パターン12A、12B、12C、12D、12E、12F、12Gを示す。また、ロータコイル14の環状に形成されたショートコイル14A、14B、14C、14D、14E、14F、14Gを示す。
図4(a)では、ステータコイル12の導体パターンに対するロータコイル14のショートコイルの位置が、一致しているときを示している。例えば、ショートコイル14Aに対して、導体パターン12Aが一致し、ショートコイル14Bに対して、導体パターン14Bが一致している。
図4(a)に示すように、ステータコイル12の導体パターン12A、12B、・・・と、ロータコイル14のショートコイル14A、14B、・・・の位置が一致しているときには、ステータコイル12の導体パターン12A、12B、・・・で発生する磁束GXにより、ショートコイル14A、14B、・・・に起電力が発生し、起電力により発生した電流により、磁束GXとは逆向きの磁束GYが発生する。磁束GYの発生により、磁束GXが弱められ、その結果ステータコイル12のインダクタンスは最小となり、共振周波数は最大となり、このとき共振周波数と励磁信号の周波数(NMHz)のずれは最大となる。
【0028】
図3と同様に、図4(b)は、(a)の等価回路である。図4(c)に、ポイント23で検出した出力電圧の波形を示す。
図4(a)に示すように、ステータコイル12の導体パターン12A、12B、・・・に対するロータコイル14のショートコイル14A、14B・・・の位置が、一致しているときには、ステータコイル12の全ての導体パターン12A、12B、・・・が発生する磁束GXを打ち消すような磁束GYが発生するため、インダクタンスは大きく低下する。よって、共振周波数Haは、約0.9MHzまで大きくなり、励磁信号の共振周波数Hから大きくずれる。
これにより、励磁コイルの共振周波数NMHzにおいて、共振周波数Haが発生する出力電圧は、VHa(V)へ低下する。
図4(c)に端子23で検出したステータコイル12の電圧波形を示す。
【0029】
図6に、本実施の形態のロータリーエンコーダ1の制御装置をブロック図で示す。ステータコイル12は、アンプ31に接続している。アンプ31は、同期検波器32に接続している。同期検波器32は、ローパスフィルタ33に接続している。ローパスフィルタ33は、コンパレータ34に接続している。
ステータコイル12の端子23におけるステータコイル12の出力電圧S1の波形を図6に示す。励磁信号であるNMHz(0.65MHz)の搬送波に対して、信号波が重ねられている。すなわち、励磁信号は、高周波であり、図3(c)や図4(c)に示す出力電圧は、信号波として、搬送波に重ねられている。すなわち、ステータコイル12の出力電圧は、搬送波が振幅変調された信号波となっている。
アンプは、出力電圧信号S1を増幅して信号S2とする。同期検波器32は、励磁信号NMHzにより、信号S2を同期検波し、信号S3を出力する。ローパスフィルタ33は、信号S3を平滑化し、波形信号S4とする。
すなわち、同期検波器32及びローパスフィルタ33により、信号S2から、高周波である搬送波を除去して、信号波のみの波形信号S4とする。この波形信号S4を、コンパレータ34でしきい値以上か否かにより、パルス信号S5に変換する。1つのパルス信号S5が出ると、ロータ可動板13が、所定のピッチPだけ回転したことがわかる。
このパルス信号をエンジン制御装置に出力することにより、パルス信号を受けたエンジン制御装置は、クランク軸の回転角度を、1度の分解能で正確に得ることができる。
【0030】
ここで、図6のローパスフィルタ33の、出力信号S4は、出力レベルMが変動する場合がある。例えば、励磁信号の振幅が変動した場合や、ステータ固定板11とロータ可動板13の隙間が微小量変化したような場合である。ここで、コンパレータ34で、しきい値でパルス化しているため、出力レベルMの変動に応じて、しきい値を調整する必要があり、しきい値が最適でなければ、コンパレータ34でのパルス化に誤差が生じ、正確に角度検出を行えない恐れがある。
第2の実施の形態では、その問題を解決している。第2の実施の形態の構成は、第1の実施の形態とほとんど同じであるので、相違する点のみ詳細に説明し、同じ部分については、説明を割愛する。
図9及び図10に、第2の実施の形態のロータコイル14、及びステータコイル121、122を示す。ロータコイル14は、第1の実施の形態と同じである。
第1の実施の形態では、ステータコイル12は1つであったが、第2の実施の形態では、ステータコイル121、ステータコイル122と2つのステータコイルを備えている。各ステータコイル121、122の形状、大きさは、第1実施の形態と同じである。ステータコイル121とステータコイル122とは、図9、図10に示すように、半ピッチP/2ずれて形成されている。
【0031】
図9は、ステータコイル121の導体パターンが、ロータコイル14のショートコイルと一致している場合を示している。このとき、ステータコイル122の導体パターンは、ロータコイル14のショートコイルと半ピッチP/2ずれている。
この状態では、図に示すように、ステータコイル121の出力電圧は最大値VHであり、ステータコイル122の出力電圧は最小値VHaである。
図10は、ステータコイル121の導体パターンが、ロータコイル14のショートコイルと半ピッチP/2ずれている場合を示している。このとき、ステータコイル122の導体パターンは、ロータコイル14のショートコイルと一致している。
この状態では、図に示すように、ステータコイル121の出力電圧は最小値VHaであり、ステータコイル122の出力電圧は最大値VHである。
【0032】
図11に、第2の実施の形態のロータリーエンコーダ1の制御装置をブロック図で示す。ステータコイル121は、差動アンプ35のプラス端子に接続している。ステータコイル122は、差動アンプ35のマイナス端子に接続している。差動アンプ35は、同期検波器32に接続している。同期検波器32は、ローパスフィルタ33に接続している。ローパスフィルタ33は、コンパレータ34に接続している。
ステータコイル121のポイント23における出力電圧S11の波形、及びステータコイル122のポイント23における出力電圧S12の波形を図9に示す。励磁信号であるNMHz(0.65MHz)の搬送波に対して、信号波が重ねられている。すなわち、励磁信号は、高周波であり、ステータコイル121、122の出力電圧は、信号波として、搬送波に重ねられている。すなわち、ステータコイル121、122の出力電圧は、搬送波が振幅変調された信号波となっている。
【0033】
差動アンプ35は、ステータコイル121の出力電圧と、ステータコイル122の出力電圧との差分を算出して、信号S13として出力する。同期検波器32は、励磁信号NMHzにより、信号S13を同期検波し、信号S14を出力する。ローパスフィルタ33は、信号S14を平滑化し、波形信号S15を出力する。
すなわち、同期検波器32及びローパスフィルタ33により、信号S13から、高周波である搬送波を除去して、信号波のみの波形信号S15とする。この波形信号S15を、コンパレータ34でしきい値以上か否かにより、パルス信号S16に変換する。1つのパルス信号S16が出ると、ロータ可動板13が、所定のピッチPだけ回転したことがわかる。
このパルス信号をエンジン制御装置に出力することにより、パルス信号を受けたエンジン制御装置は、クランク軸の回転角度を、1度の分解能で正確に得ることができる。
【0034】
以上詳細に説明したように、第1、及び第2の実施の形態のロータリーエンコーダ1によれば、次のような効果を得ることができる。
ステータコイル12が形成されたステータ固定板11と、ステータ固定板11と隙間を介して対向しながら動作可能に設けられ、ロータコイル14が形成されたロータ可動板13と、を有するロータリーエンコーダ1であって、(a)ステータコイル12が、所定のピッチPでジグザグに折り返された導体パターンであること、(b)ステータコイル12と直列に接続された容量素子であるコンデンサ22を有すること、(c)ロータコイル14が、ステータコイル12と隙間を介して対向して配置され、所定のピッチPで短絡されたショートコイルであること、(d)ステータコイル12にコンデンサ22を介して供給される励磁信号(周波数をNMHzとする。)を出力する励磁信号出力回路を有すること、(e)ステータコイル12の出力電圧の変化に基づいて、所定のピッチP分、ロータ可動板13が移動したことを検出する移動検出手段31、32、33、34、35を有すること、を特徴とするので、ステータコイル12の導体パターンに対するロータコイル14のショートコイルの位置が、所定のピッチPの半ピッチ分P/2ずれているときには、ステータコイル12のインダクタンスは変化せず(ショートコイルの影響を受けず)、共振周波数は励磁信号の周波数(NMHz)と一致する。よって、ステータコイルの出力信号の振幅は最大となる。
【0035】
一方、上記の位置関係から、ステータコイル12の導体パターンに対するロータコイル14のショートコイルの位置が変化するに従い、ステータコイル12のインダクタンスは、ロータコイル14のショートコイルの影響を受けて小さくなっていき、ステータコイル12の導体パターンと、ロータコイル14のショートコイルの位置が一致するときには、ステータコイル12のインダクタンスは最小となり、このとき、共振周波数と励磁信号の周波数(NMHz)のずれが最大となる。したがって、ステータコイル12の出力信号の振幅は最小となる。このステータコイル12の出力電圧(振幅)の変化に基づいて、移動検出手段は所定ピッチP分、ロータ可動板13が回転したことを検出できる。
例えば、クランク軸の角度センサの場合には、ステータコイル12のジグザグ(九十九折り)のピッチを1度とし、ショートコイルのピッチを1度としておけば、ロータの可動板がステータ固定板に対して、1度ずれる毎に、パルス信号を出力することができ、それをエンジン制御手段に送信することができる。
【0036】
また、第1ステータコイル121に対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイル122を有すること、移動検出手段31、32、33、4、35が、第1ステータコイル121の出力電圧と、第2ステータコイル122の出力電圧の差分に基づいて、所定のピッチ分P、ロータ可動板13が回転したことを検出すること、を特徴とするので、例えば、ステータ固定板11とロータ可動板13との隙間の変動により、共振周波数の振幅の変化に誤差が生じた場合でも、誤差をキャンセルすることができる。
すなわち、第1ステータコイル121で検出する第1電圧信号と、第2ステータコイル122で検出する第2電圧信号に対しては、例えば、ステータ固定板11とロータ可動板13との隙間の変動の誤差は、等しく加減算される。したがって、同じタイミングにおいて、第1電圧信号と第2電圧信号との差分を算出することにより、発生した誤差をキャンセルすることができる。
また、ステータコイル12が、ステータ固定板11の表面に形成され、ロータコイル14が、ロータ可動板13の表面に形成されていること、を特徴とするので、ロータリーエンコーダ1の軸心方向における寸法を小さくすることができる。
【0037】
次に、ステータコイル12と、ロータコイル14の構成の変形例を説明する。これらの変形例については、第1実施の形態及び第2の実施の形態において、これから説明する構成のみを変形させれば、実施可能であるので、相違する点のみ説明し、重複する部分については説明を割愛する。
図12に第1変形例を示す。ロータ可動板13とロータコイル14とは、第1実施の形態または第2の実施の形態と同じである。ステータ固定板111、及びその上に形成されるステータコア123が、第1実施の形態または第2の実施の形態のステータ固定板11の、円周方向に8等分されたものの1つである。
第1の変形例によれば、ステータコイル12が、ロータコイル14の全周に対して、一部のみ配置されていること、を特徴とするので、全周に設けた場合と比較して、出力が低下し、S/N比が悪くなるが、取り付け箇所が限られている場合にも、適用可能となる。
【0038】
図13に第2の変形例を示す。ロータ可動板13の外周表面131aに、ロータコイル141が形成されている。また、ステータ固定板112の内周面に、ステータコイル124が形成されている。
第2変形例によれば、ステータコイル124が、ステータ固定板112の内周表面に形成され、ロータコイル141が、ロータ可動板131の外周表面131aに形成されていること、を特徴とするので、位置センサの径方向における寸法を小さくすることができる。また、第1または第2実施の形態と比較して、ステータコイル124の導体パターンと、ロータコイル141のショートコイルの位置関係の精度を保つことが容易であり、製造コストを低減できる。
図14に第3の変形例を示す。ロータ可動板131とロータコイル141とは、第2変形例と同じである。ステータ固定板113、及びその上に形成されるステータコア125が、第2変形例のステータ固定板112の、円周方向に8等分されたものの1つである。
第3の変形例によれば、ステータコイル125が、ロータコイル141の全周に対して、一部のみ配置されていること、を特徴とするので、全周に設けた場合と比較して、取り付け箇所が限られている場合にも、適用可能となる。
【0039】
なお、この発明は前記各実施形態に限定されるものではなく、発明の趣旨を逸脱することのない範囲で構成の一部を適宜に変更して実施することもできる。
本実施の形態では、ステータコイル12の導体パターンと、ロータコイル14のショートコイルのピッチを中心角で1度となるように形成したが、コストはかかるが、精度の高い製造法を用いて、より細密な導体パターン、ショートコイルを形成して、分解能を向上させても良い。
本実施の形態では、角度検出用のセンサについて説明したが、ステータコイル12の導体パターン、及びロータコイル14のショートコイルを直線状に形成することにより、直線の位置センサを形成することができる。
【符号の説明】
【0040】
1 ロータリーエンコーダ
11 ステータ固定板
12 ステータコイル
13 ロータ可動板
14 ロータコイル
22 コンデンサ
31 アンプ
32 同期検波器
33 ローパスフィルタ
34 コンパレータ
35 差動アンプ
【特許請求の範囲】
【請求項1】
ステータコイルが形成されたステータ固定板と、
前記ステータ固定板と隙間を介して対向しながら動作可能に設けられ、ロータコイルが形成されたロータ可動板と、
を有する位置センサにおいて、
前記ステータコイルが、所定のピッチでジグザグに折り返されたコイルであること、
前記ステータコイルと直列に接続された容量素子を有すること、
前記ロータコイルが、前記ステータコイルと隙間を介して対向して配置され、前記所定のピッチで短絡されたショートコイルであること、
前記ステータコイルに前記容量素子を介して供給される励磁信号を出力する励磁信号出力回路を有すること、
前記ステータコイルの出力電圧の変化に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出する移動検出手段を有すること、
を特徴とする位置センサ。
【請求項2】
請求項1に記載する位置センサにおいて、
前記ステータコイルに対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイルを有すること、
前記移動検出手段が、前記ステータコイルの出力電圧と、前記第2ステータコイルの出力電圧の差分に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出すること、
を特徴とする位置センサ。
【請求項3】
請求項1または請求項2に記載する位置センサにおいて、
前記ステータコイルが、前記ステータ固定板の表面に形成され、
前記ロータコイルが、ロータ可動板の表面に形成されていること、
を特徴とする位置センサ。
【請求項4】
請求項1または請求項2に記載する位置センサにおいて、
前記ステータコイルが、前記ステータ固定板の内周表面に形成され、
前記ロータコイルが、ロータ可動板の外周表面に形成されていること、
を特徴とする位置センサ。
【請求項5】
請求項3または請求項4に記載する位置センサにおいて、
前記ステータコイルが、前記ロータコイルの全周に対して、一部のみ配置されていること、
を特徴とする位置センサ。
【請求項1】
ステータコイルが形成されたステータ固定板と、
前記ステータ固定板と隙間を介して対向しながら動作可能に設けられ、ロータコイルが形成されたロータ可動板と、
を有する位置センサにおいて、
前記ステータコイルが、所定のピッチでジグザグに折り返されたコイルであること、
前記ステータコイルと直列に接続された容量素子を有すること、
前記ロータコイルが、前記ステータコイルと隙間を介して対向して配置され、前記所定のピッチで短絡されたショートコイルであること、
前記ステータコイルに前記容量素子を介して供給される励磁信号を出力する励磁信号出力回路を有すること、
前記ステータコイルの出力電圧の変化に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出する移動検出手段を有すること、
を特徴とする位置センサ。
【請求項2】
請求項1に記載する位置センサにおいて、
前記ステータコイルに対し、位相が半ピッチずれた所定のピッチでジグザグに折り返された第2ステータコイルを有すること、
前記移動検出手段が、前記ステータコイルの出力電圧と、前記第2ステータコイルの出力電圧の差分に基づいて、前記所定のピッチ分、前記ロータ可動板が移動したことを検出すること、
を特徴とする位置センサ。
【請求項3】
請求項1または請求項2に記載する位置センサにおいて、
前記ステータコイルが、前記ステータ固定板の表面に形成され、
前記ロータコイルが、ロータ可動板の表面に形成されていること、
を特徴とする位置センサ。
【請求項4】
請求項1または請求項2に記載する位置センサにおいて、
前記ステータコイルが、前記ステータ固定板の内周表面に形成され、
前記ロータコイルが、ロータ可動板の外周表面に形成されていること、
を特徴とする位置センサ。
【請求項5】
請求項3または請求項4に記載する位置センサにおいて、
前記ステータコイルが、前記ロータコイルの全周に対して、一部のみ配置されていること、
を特徴とする位置センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−226877(P2011−226877A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−95731(P2010−95731)
【出願日】平成22年4月19日(2010.4.19)
【出願人】(000116574)愛三工業株式会社 (1,018)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月19日(2010.4.19)
【出願人】(000116574)愛三工業株式会社 (1,018)
【Fターム(参考)】
[ Back to top ]