
位置処理装置、位置処理方法及び位置処理用プログラム
【課題】駐車場の出口及び入口をそれぞれ示す位置データが用意されていない場合であっても、より正確に出口又は入口それぞれの位置を特定することが可能な位置処理装置を提供する。
【解決手段】道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出するウインカ検出部等の操作検出手段と、前記通過操作が行われた位置を検出するセンサ部等の位置検出手段と、前記検出された位置を、前記接続路の位置として決定する処理部等の決定手段と、を備え、道路外施設である駐車場Pから道路Rに出るための出口OUTの通過に伴うウインカの操作が行われた位置Poutを、出口OUTとして決定する。
【解決手段】道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出するウインカ検出部等の操作検出手段と、前記通過操作が行われた位置を検出するセンサ部等の位置検出手段と、前記検出された位置を、前記接続路の位置として決定する処理部等の決定手段と、を備え、道路外施設である駐車場Pから道路Rに出るための出口OUTの通過に伴うウインカの操作が行われた位置Poutを、出口OUTとして決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、位置処理装置、位置処理方法及び位置処理用プログラムの技術分野に属する。より詳細には、道路と道路外施設との間の接続路の位置についての処理を行う位置処理装置及び位置処理方法並びに当該位置処理装置用プログラムの技術分野に属する。
【背景技術】
【0002】
ナビゲーション装置による例えば車両の案内では、道路外にある駐車場を目的地とした案内や、その駐車場を出発地とした他の目的地への案内が行われることがある。
【0003】
一方近年では、駐車場自体が広大である場合や、道路との関係で駐車場の出入口が複雑な構造となっている場合、あるいは一つの駐車場に対して出口又は入口がそれぞれ複数存在する場合がある。このような場合には、駐車場全体としての代表的な位置(例えば、地図におけるその駐車場の中央の位置)ではなく、その駐車場の入口の位置を目的地としたり、その駐車場の出口を出発地とした具体的且つ正確な案内が望まれる。
【0004】
このとき、その駐車場の入口や出口の位置を示す位置情報が、ナビゲーション装置用の例えば地図データの一部として予め用意されている場合には、その位置情報を用いて上述したような具体的且つ正確な案内を行うことができる。しかしながらこのような位置情報が予め用意されていない場合、上述したような具体的且つ正確な案内ができない。
【0005】
そこで、このような問題点を解決するための従来技術として、例えば下記特許文献1に記載されている技術がある。特許文献1に記載されている技術では、経路誘導中において車両の現在位置を順次特定し、道路外の駐車場に車両が駐車された場合に、道路からの逸脱位置のうち最新のものをその駐車場の入口位置として特定する構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】再公表第WO2007−122926号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1に開示された技術であっても、例えばいわゆるマップマッチング処理上の誤差等の理由により、道路からの逸脱位置が実際の逸脱位置からずれた場合には、駐車場の入口位置を正確に特定することができないという問題点がある。
【0008】
また上記特許文献1では、駐車場の出口の位置を示す位置情報が予め用意されていない場合について、その出口の位置を特定することについては、何ら考慮されていない。更に駐車場の出口から車両が道路に出る場合、その案内処理上においては、出口を通って出た道路上に車両の現在位置がマッチングされるまで、実際に車両がその道路に出たタイミングから所定の時間がかかる場合が多い。このような場合に、仮に車両の現在位置がマッチングされた道路の位置をその駐車場の出口の位置として特定するとしても、上記所定の時間分の位置誤差が含まれてしまうという問題点がある。
【0009】
そこで本願は、上記の各問題点に鑑みて為されたもので、その課題の一例は、駐車場の出口及び入口をそれぞれ示す位置情報が予め用意されていない場合であっても、より正確に出口又は入口それぞれの位置を特定することが可能な位置処理装置及び位置処理方法並びに当該位置処理装置用プログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するために、請求項1に記載の発明は、道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出するウインカ検出部等の操作検出手段と、前記通過操作が行われた位置を検出するセンサ部等の位置検出手段と、前記検出された位置を、前記接続路の位置として決定する処理部等の決定手段と、を備える。
【0011】
上記の課題を解決するために、請求項9に記載の発明は、道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出する操作検出工程と、前記通過操作が行われた位置を検出する位置検出工程と、前記検出された位置を、前記接続路の位置として決定する決定工程と、を含む。
【0012】
上記の課題を解決するために、請求項10に記載の発明は、コンピュータを、請求項1から請求項8のいずれか一項に記載の位置処理装置として機能させる。
【図面の簡単な説明】
【0013】
【図1】実施形態に係る位置処理装置の概要構成を示すブロック図である。
【図2】実施例に係るナビゲーション装置の概要構成を示す図であり、(a)は当該概要構成を示すブロック図であり、(b)は実施例に係る位置処理用データベースを例示する図である。
【図3】実施例に係る出口位置の処理を示す図であり、(a)は当該出口位置の処理を示すフローチャートであり、(b)は当該出口位置の処理を説明する概念図である。
【図4】実施例に係る入口位置の処理を示す図であり、(a)は当該入口位置の処理を示すフローチャートであり、(b)は当該入口位置の処理を説明する概念図である。
【図5】変形例に係る出口位置の処理を説明する概念図である。
【発明を実施するための形態】
【0014】
次に、本願を実施するための形態について、図1を用いて説明する。なお図1は、実施形態に係る位置処理装置の概要構成を示すブロック図である。
【0015】
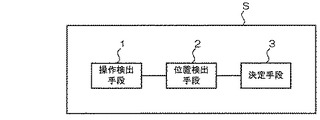
図1に示すように、実施形態に係る位置処理装置Sは、操作検出手段1と、位置検出手段2と、決定手段3と、を備えて構成されている。
【0016】
この構成において操作検出手段1は、道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出し、その検出結果を位置検出手段2に出力する。ここで「道路外施設」とは、例えば位置処理装置Sが車両に搭載されている場合にあっては、その車両の駐車場や、一時的に立ち寄って運転者が物品の購入をする施設等である。また「接続路」とは、同様の場合にあっては、道路からその道路外施設への入口、又はその道路外施設から道路へ戻るための出口等である。更に「通過操作」とは、同様の場合にあっては、例えば道路から道路外施設に入るためのウインカ操作や車両を減速させるためのブレーキ操作等である。
【0017】
位置検出手段2は、操作検出手段1における検出結果に基づいて、上記通過操作が行われたことが検出されたとき、その通過操作が行われた位置を検出し、その検出結果を決定手段3に出力する。上記の例で言えば、例えばウインカ操作が行われた位置を検出し、その検出結果を決定手段3に出力する。
【0018】
これにより決定手段3は、位置検出手段2における検出結果に基づいて、その検出された位置を、接続路の位置として決定する。すなわち例えば、接続路が道路外施設から道路への出口である場合にあっては、その道路へ出るための通過操作が行われた位置を、その出口の位置として決定する。この決定された位置を示す位置情報は、例えば位置処理装置Sが備えられた車両の案内に後ほど用いるために記録されたり、あるいは他の車両の案内に供させるために外部の位置情報記憶装置に送信されて記録されたりする。
【0019】
以上説明したように、実施形態に係る位置処理装置Sの動作によれば、道路と道路外施設との間の接続路の通過に伴う通過操作が行われた位置を接続路の位置として決定するので、接続路の位置を示す位置情報がない場合でも、接続路の位置をより正確に決定することができる。
【実施例】
【0020】
次に、上述した実施形態に対応する具体的な実施例について、図2乃至図4を用いて説明する。なお以下に説明する実施例は、車両に搭載され当該車両の移動を案内するナビゲーション装置における位置検出処理に本願を適用した場合の実施例である。
【0021】
また、図2は実施例に係るナビゲーション装置の概要構成を示す図であり、図3は実施例に係る出口位置の処理を示す図であり、図4は実施例に係る入口位置の処理を示す図である。このとき図2(a)では、図1に示した実施形態に係る位置処理装置Sにおける各構成部材に対応する実施例の構成部材それぞれについて、当該位置処理装置Sにおける各構成部材と同一の部材番号を用いている。
【0022】
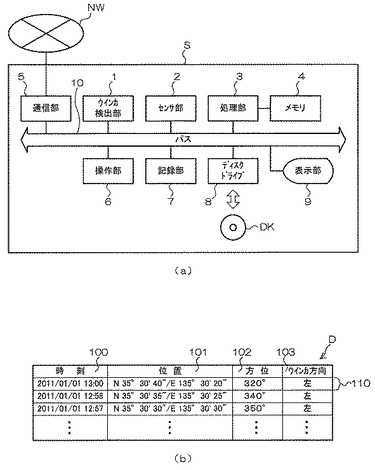
図2(a)に示すように、位置処理装置Sの一例としての実施例に係るナビゲーション装置Sは、操作検出手段1の一例としてのウインカ検出部1と、位置検出手段2の一例としてのセンサ部2と、CPU、RAM(Random Access Memory)及びROM(Read Only Memory)等を含む決定手段3の一例、移動検出手段の一例及び案内手段の一例としての処理部3と、メモリ4と、通信部5と、操作部6と、記憶手段の一例及び接続路位置記憶手段の一例としての記録部7と、ディスクドライブ8と、表示部9と、を備えて構成されている。このとき、ウインカ検出部1、センサ部2、処理部3、通信部5、操作部6、記録部7、ディスクドライブ8及び表示部9は、バス10を介して相互にデータの授受が可能とされている。
【0023】
この構成においてウインカ検出部1は、車両の運転者によりウインカを出す操作が行われている否かを、ウインカが出されている方向(右又は左)と共に検出する。このウインカを出す操作が、本願における「通過操作」の一例に相当する。
【0024】
一方センサ部2は、図示しない車速パルス検出部、加速度センサ、ジャイロセンサ及びGPS(Global Positioning System)センサ等を含んで構成されている。このうち車速パルス検出部は、車両に備えられた車輪の回転に応じた間隔で出力される車速パルスを検出する。この車速パルスは、例えば車両の速度や移動距離の算出に用いられる。加速度センサは、車両の移動に伴って当該車両に加わる加速度を検出する。この加速度は、それを一回積分することによる速度の算出に用いられ、更にそれをもう一度積分することによる移動距離の算出に用いられる。ジャイロセンサは、車両の進行方向及びその変化を検出する。GPSセンサは、衛星軌道上のGPS衛星からの航法電波を受信し、ナビゲーション装置Sが搭載されている車両の位置、高度、速度等を検出する。このGPSセンサからの出力は、例えば加速度センサ及びジャイロセンサそれぞれにおける検索結果を用いた自立航法における位置誤差等の補正等に用いられる。
【0025】
通信部5は、外部の例えばインターネット等のネットワークNWと無線により接続され、車両の案内に必要な渋滞情報や天気情報等を取得する。操作部6は、リモートコントロール装置及び操作ボタン等を含んで構成されており、ナビゲーション装置Sに対する使用者又は運転者の入力操作に対応する操作信号を出力する。ディスクドライブ8は、挿入されたディスクDKに対する必要なデータの記録及び再生に用いられる。記録部7は、例えばハードディスク等の不揮発性の記録媒体を含んで構成されており、車両の案内に必要な地図データや音声データ等のナビゲーション用データの他、実施例に係る後述する出口位置の処理及び入口位置の処理を行うためのプログラムが不揮発性に記憶されている。なおこれらのプログラムは、通信部5を介してネットワークNWから取得するようにしてもよいし、ディスクDKに予め記録されている当該プログラムをディスクDKから読み出して取得することもできる。液晶ディスプレイ等からなる表示部9は、地図等、車両の案内のために必要な情報を表示する。
【0026】
以上の構成において処理部3は、メモリ4との間で必要なデータの授受を行いつつ、以下に説明する実施例に係る出口位置の処理及び入口位置の処理を含む車両の案内のための処理、具体的には、現在位置検出処理、地図上の道路データへのマップマッチング処理及び経路探索処理等を統括制御する。
【0027】
次に、記録部7に逐次記録される、実施例に係る位置処理用データベースについて、図2(b)を用いて説明する。
【0028】
図2(b)に例示するように、実施例に係る位置処理用データベースDとしては、時刻データ100、位置データ101、方位データ102及びウインカ方向データ103を一組とする位置処理用データ110が、ウインカの操作に対応した後述するタイミング毎に生成されて蓄積される。このとき時刻データ100は、ウインカが操作されていると判定された時刻を示すデータであり、位置データ101は、ウインカが操作されていると判定された時刻における車両の位置を示すデータである。また方位データ102は、ウインカが操作されていると判定された時刻における車両の方位(進行方位)を、例えば北を0°/360°として示すデータである。ウインカ方向データ103は、操作されていると判定されたウインカの方向を示すデータである。これら位置処理用データ110の生成タイミング等については、後ほど詳説する。
【0029】
次に、処理部3を中心として実行される実施例に係る出口位置の処理について、具体的に図2及び図3を用いて説明する。以下に説明する出口位置の処理は、「道路外施設」の一例に相当する駐車場から、その出口を介して、その駐車場に接している道路に出る際に行われる処理である。
【0030】
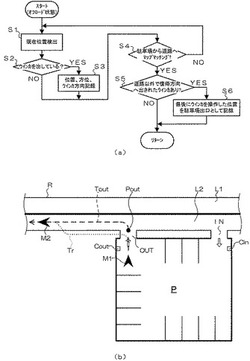
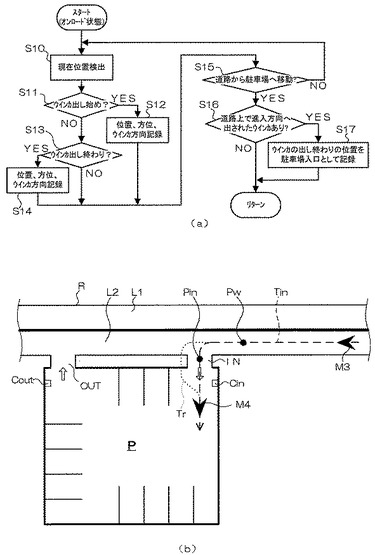
実施例に係る出口位置の処理は、図3(a)に示すように、オフロード状態において、例えば所定の時間毎に開始される処理である。ここで「オフロード状態」とは、ナビゲーション装置Sが搭載されている車両の現在位置が、地図データにおいて道路外にある上記駐車場にある状態をいう。実施例に係る出口位置の処理として処理部3は、オフロード状態において、従来と同様の方法によりナビゲーション装置Sが搭載されている車両の現在位置を検出する(ステップS1)。ステップS1の処理には、センサ部2からの出力に基づいた現在位置の検出処理と、地図データに基づいたマップマッチング処理が含まれている。次に処理部3は、ウインカ検出部1からの出力に基づいて、ウインカを出す操作が運転者により行われているか否かを判定する(ステップS2)。ステップS2においてウインカを出す操作が行われてないと判定された場合(ステップS2;NO)、処理部3は後述するステップS4の処理に移行する。一方ステップS2においてウインカを出す操作が行われていると判定された場合(ステップS2;YES)、処理部3は、当該判定がされた時刻を示す時刻データ100、その時刻における車両の現在位置を示す位置データ101及びその時刻に出されているウインカの方向を示す方位データ102を含む位置処理用データ110を生成し、図2(b)に例示する位置処理用データベースDに追加して記録部7に記録する(ステップS3)。このステップS3の処理により、位置処理用データベースDに新しい位置処理用データ110が一つ追加されることとなる。
【0031】
次に処理部3は、実施例に係る駐車場から、それに接する道路へと現在位置がマップマッチングされたか否かを判定する(ステップS4)。このステップS4の処理は、従来のマップマッチングと同様の手法により行われる。ステップS4において現在位置が道路へマップマッチングされていないと判定された場合、即ち、車両が未だ駐車場から道路に出ていないと判定された場合(ステップS4;NO)、処理部3は上記ステップS1の処理に移行する。この後、上記ステップS1、S2及びS3の処理が繰り返されることにより、位置処理用データベースD内に位置処理用データ110が新たに追加されることとなる。一方、ステップS4において現在位置が道路へマップマッチングされたと判定された場合、即ち、車両が駐車場から道路に出たと判定された場合(ステップS4;YES)、処理部3は、道路以外の位置(例えば、後述の図3(b)に示す位置Pout)で、道路への復帰方向に出されたウインカがあるか否かを、位置処理用データベースDを参照することにより判定する(ステップS5)。ここで「復帰方向」とは、駐車場から道路へ出るときに右折により出た場合には当該「復帰方向」は「右」であり、また同様に左折により道路に出た場合には「左」である。この復帰方向について処理部3は、例えば、ウインカを出す操作が行われたと判定されたタイミング(上記ステップS2参照)における車両の方位変化の判定、現在の車両の進行方位(即ち道路の方位)と地図データ上におけるその道路の方位との比較判定、又は、ウインカを出す操作が行われたと判定されたタイミングにおける車両の位置と道路上にある車両の現在位置との相対的な比較判定等の手法により、復帰方向が「右」であるか「左」であるかを判定する。そして、ステップS5の判定において処理部3は、この復帰方向と一致する方向に出されていたウインカの有無を、位置処理用データベースDの特にウインカ方向データ103を参照して判定する。ステップS5において道路への復帰方向に出されたウインカがないと判定された場合(ステップS5;NO)、処理部3は実施例の出口位置の処理を終了し、元の案内処理に移行する。
【0032】
一方ステップS5において道路への復帰方向に出されたウインカがあると判定された場合(ステップS5;YES)、処理部3は、道路への復帰方向に出されたウインカのうち、最後にウインカをその復帰方向に出したタイミングにおける車両の位置を、駐車場の出口の位置として決定し、記録部7の例えば地図データ内に記録する(ステップS6)。このステップS6の処理について具体的に処理部3は、位置処理用データ110における時刻データ100を参照して、最後に(即ち最も新しく)復帰方向に出されたウインカのウインカ方向データ103を含む位置処理用データ110を検索し、その位置処理用データ110に含まれている位置データ101により示される位置を、駐車場の出口の位置として記録部7に記録する。その後処理部3は実施例の出口位置の処理を終了し、元の案内処理に移行する。
【0033】
次に、上述してきた出口位置の処理について、より具体的に図3(b)に例示しつつ説明する。図3(b)において、道路Rは車線L1及びL2を有する片側一車線の道路であり、駐車場Pがそれに接している。道路Rと駐車場Pとの間には、本願における「接続路」の一例として、入口INと出口OUTが設けられている。入口INには例えば発券機Cinが、出口OUTには例えば精算機Coutが、それぞれ設置されている。そして、駐車場P内の自車位置マークM1により示される位置から出口OUTを介して駐車場Pを出て道路R上の自車位置マークM2により示される位置まで、車両が移動したとする。この場合における実施例に係る出口位置の処理としては、駐車場P内において現在位置が検出され(上記ステップS1参照)、更に出口OUTから左折により道路Rに出るために出口OUT付近(例えば、図3(b)に示す位置Pout)でウインカを左に出す操作が行われる(上記ステップS2;YES参照)。このときに、ウインカを出したタイミングに対応する上記位置処理用データ110が位置処理用データベースDに追加される(上記ステップS3参照)。そして、道路Rへのマップマッチングがされたと判定されたタイミングにおいて(上記ステップS4;YES参照)、最後に左にウインカを出す操作が行われたタイミングにおける車両の位置(例えば上記位置Pout)が、出口OUTの位置として地図データ内に記録される(上記ステップS5及びS6参照)。このとき、実際の車両の移動軌跡Tout(図3(b)において破線で示す)に対して、例えば道路Rへのマップマッチングにおける遅延又は誤差により、案内処理(表示部9における表示)上の車両の移動軌跡が図3(b)において点線で示す移動軌跡Trとなったとしても、出口OUTの位置は、例えば道路Rへマップマッチングされた位置マークM2近傍の位置ではなく、位置Poutとして正しく地図データに記録されることとなる。
【0034】
次に、処理部3を中心として実行される実施例に係る入口位置の処理について、具体的に図2及び図4を用いて説明する。以下に説明する入口位置の処理は、道路から、その道路に接している駐車場に入口を介して進入する際に行われる処理である。
【0035】
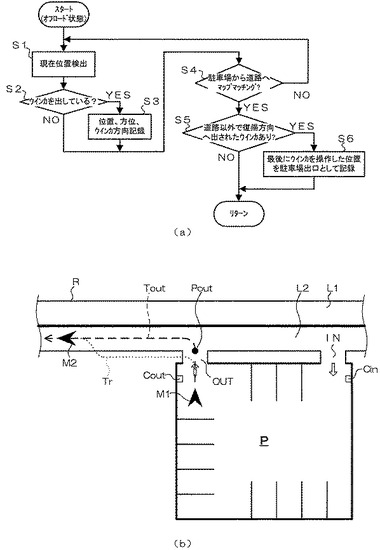
実施例に係る入口位置の処理は、図4(a)に示すように、オンロード状態において、例えば所定の時間毎に開始される処理である。ここで「オンロード状態」とは、車両の現在位置が、地図データにおいて道路上にマップマッチングされている状態をいう。実施例に係る入口位置の処理として処理部3は、オンロード状態において、従来と同様の方法によりナビゲーション装置Sが搭載されている車両の現在位置を検出する(ステップS10)。ステップS10の処理には、出口位置の処理の場合と同様に、センサ部2からの出力に基づいた現在位置の検出処理と、地図データに基づいたマップマッチング処理が含まれている。次に処理部3は、ウインカ検出部1からの出力に基づいて、ウインカの出し始めとなったか否かを判定する(ステップS11)。このステップS11の判定として具体的に処理部3は、例えば、ウインカを出し始める際の操作が運転者により行われたか否かを判定する。ここで、「ウインカを出し始める際の操作」とは、具体的には、左折又は右折する場合において左方向又は右方向に向けてウインカを出すために、車両の運転者が行うウインカスイッチ(通常はハンドル脇にあるウインカスイッチ)の操作である。ステップS11においてウインカの出し始めではないと判定された場合(ステップS11;NO)、処理部3は後述するステップS13の処理に移行する。一方ステップS11においてウインカの出し始めであると判定された場合(ステップS11;YES)、処理部3は、当該判定がされた時刻を示す時刻データ100、その時刻における車両の現在位置を示す位置データ101及びその時刻以降に出されたウインカの方向を示す方位データ102を含む位置処理用データ110を生成し、図2(b)に例示する位置処理用データベースDに追加して記録部7に記録する(ステップS12)。このステップS12の処理により、位置処理用データベースDに新しい位置処理用データ110が一つ追加されることとなる。一方、ステップS11においてウインカの出し始めでないと判定された場合(ステップS11;NO)、処理部3は次に、ウインカ検出部1からの出力に基づいて、ウインカの出し終わりとなったか否かを判定する(ステップS13)。このステップS13の判定として具体的に処理部3は、例えば、後述するステップS15の処理を経て再度上記ステップS10の処理に戻った場合において、前回のステップS10及びS11の処理においてウインカが出されていたものが、今回のステップS13の判定のタイミングにおいてそのウインカが出されていないことをもって、ウインカの出し終わりとなったかを判定すればよい。この他、例えば、ウインカを出し終える際の操作が運転者により行われたか否かにより、ウインカの出し終わりとなったか否かを判定してもよい。ここで、「ウインカを出し終える際の操作」とは、具体的には、左折又は右折中において行っていた左方向又は右方向のウインカの点滅を停止させるために、車両の運転者が行う操作である。なお一般に上記ウインカスイッチは、曲がっている方向からハンドルを戻すことにより自動的に中立の位置に戻る構造となっている。よって上記の「ウインカを出し終える際の操作」とは、一般には曲がっている方向からハンドルを戻す操作である。ステップS13においてウインカの出し終わりでないと判定された場合(ステップS13;NO)、処理部3は後述するステップS15の処理に移行する。一方ステップS13においてウインカの出し終わりであると判定された場合(ステップS13;YES)、処理部3は、当該判定がされた時刻を示す時刻データ100、その時刻における車両の現在位置を示す位置データ101及びその時刻まで出されていたウインカの方向を示す方位データ102を含む位置処理用データ110を生成し、図2(b)に例示する位置処理用データベースDに追加して記録部7に記録する(ステップS14)。このステップS14の処理により、位置処理用データベースDに新しい位置処理用データ110が更に一つ追加されることとなる。
【0036】
次に処理部3は、実施例に係る道路から外れ、それに接する駐車場へと現在位置が移動したか否かを判定する(ステップS15)。このステップS15の処理は従来の現在位置検出処理と同様の手法により行われる。ステップS15において現在位置が駐車場へ移動していないと判定された場合、即ち、車両が未だ道路にマップマッチングされ、道路から駐車場に入っていないと判定された場合(ステップS15;NO)、処理部3は上記ステップS10の処理に移行する。この後、上記ステップS10乃至S14の処理が繰り返されることにより、位置処理用データベースD内に位置処理用データ110が逐次追加されることとなる。一方、ステップS15において現在位置が道路から外れ、駐車場へ移動したと判定された場合、即ち、車両が道路から駐車場に入ったと判定された場合(ステップS15;YES)、処理部3は、道路上の位置(例えば、後述の図4(b)に示す位置Pw)で、駐車場への進入方向に出されたウインカがあるか否かを、位置処理用データベースDを参照することにより判定する(ステップS16)。ここで「進入方向」とは、道路から駐車場へ入るときに右折により入った場合には当該「進入方向」は「右」であり、また同様に左折により駐車場に入った場合には「左」である。この進入方向について処理部3は、例えば、ウインカの出し始めと判定されたタイミングからウインカの出し終わりと判定されたタイミングまでの間(上記ステップS11及びS13参照)における車両の方位変化の判定、車両の現在の方位と駐車場への進入直前に現在位置が存在していた道路の方位との差を用いた判定、又は、ウインカの出し始めと判定されたタイミングにおける車両の位置と現在位置(ステップS15の判定により駐車場内であることになる)との相対的な比較判定等の手法により、進入方向が「右」であるか「左」であるかを判定する。そして、ステップS16の判定において処理部3は、この進入方向と一致する方向に出されていたウインカの有無を、位置処理用データベースDの特にウインカ方向データ103を参照して判定する。ステップS16において駐車場への進入方向に出されたウインカがないと判定された場合(ステップS16;NO)、処理部3は実施例の入口位置の処理を終了し、元の案内処理に移行する。
【0037】
一方ステップS16において駐車場への進入方向に出されたウインカがあると判定された場合(ステップS16;YES)、処理部3は、駐車場への進入方向に出されていたウインカの出し終わりであると判定されたタイミングにおける車両の位置を、駐車場の入口の位置として決定し、記録部7の例えば地図データ内に記録する(ステップS17)。このステップS17の処理について具体的に処理部3は、位置処理用データ110における時刻データ100を参照して、最後に(即ち最も新しく)進入方向に出されていたウインカのウインカ方向データ103を含む位置処理用データ110を検索し、その位置処理用データ110に含まれている位置データ101により示される位置を、駐車場の入口の位置として記録する。その後処理部3は実施例の入口位置の処理を終了し、元の案内処理に移行する。
【0038】
次に、上述してきた入口位置の処理について、より具体的に図4(b)に例示しつつ説明する。図4(b)において、図3(b)に例示したものと同様の道路R等については、同様の符号を付して細部の説明は省略する。車両が、道路R上の自車位置マークM3により示される位置から入口INを介して駐車場Pに入り、自車位置マークM4により示される位置まで移動したとする。この場合における実施例に係る入口位置の処理としては、道路R上において現在位置が検出され(上記ステップS10参照)、更に入口INから左折により駐車場Pに入るために入口INの手前の道路Rの例えば位置Pwでウインカを左に出し始める際の操作が行われる(上記ステップS11;YES参照)。このとき、ウインカの出し始めと判定されたタイミングに対応する上記位置処理用データ110が位置処理用データベースDに追加される(上記ステップS12参照)。更に車両が実際に左折して入口INに入る際には、その手前の位置Pinでウインカの出し終わりが判定される(上記ステップS13;YES参照)。このとき、ウインカの出し終わりと判定されたタイミングに対応する上記位置処理用データ110(上記位置Pinを示す位置データ101を含む)が位置処理用データベースDに追加される(上記ステップS14参照)。そして、道路Rから外れ、駐車場Pへ入ったと判定されたタイミングにおいて(上記ステップS15;YES参照)、最後にウインカを出し終えたタイミングにおける車両の位置(上記位置Pin)が、入口INの位置として地図データ内に記録される(上記ステップS16及びS17参照)。このとき、実際の車両の移動軌跡Tin(図4(b)において破線で示す)に対して、例えばマップマッチングにおける遅延又は誤差により、案内処理(表示部9における表示)上において道路Rから外れて駐車場Pへ入った地点を含む車両の移動軌跡が図4(b)において点線で示す移動軌跡Trとなったとしても、入口INの位置は、例えば駐車場Pへ入った位置マークM4近傍の位置ではなく、位置Pinとして正しく地図データに記録されることとなる。
【0039】
以上それぞれ説明したように、実施例に係る出口位置の処理又は入口位置の処理によれば、道路Rと駐車場Pとの間の出口OUT又は入口INの通過に伴うウインカの操作が行われた位置を出口OUT又は入口INの位置として決定して記録するので、出口OUT又は入口INの位置を示す位置データが地図データ内に用意されていない場合でも、出口OUT又は入口INの位置をより正確に決定して記録することができる。
【0040】
また、図3に示す出口位置の処理の場合には、駐車場Pから道路Rへ出る際の出口OUTの通過に伴うウインカの操作が行われたことが検出されたタイミングにおける位置を示す位置データ101を記録部7に記録すると共に、駐車場Pから道路Rへ出たか否かを検出し、当該出たことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて記憶されている位置を出口OUTの位置として決定して記録するので、駐車場Pから道路Rへの出口OUTの位置をより正確に決定することができる。
【0041】
更に、図4に示す入口処理の場合には、道路Rから道路外の駐車場Pへ入る際の入口INの通過に伴ってウインカの出し終わりと判定されたタイミングにおける位置を示す位置データ101を記録部7に記録すると共に、道路Rから駐車場Pへ入ったか否かを検出し、道路Rから駐車場Pへ入ったことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて記憶されている位置を入口INの位置として決定して記録するので、道路Rから駐車場Pへの入口INの位置をより正確に決定することができる。
【0042】
更にまた、決定された出口OUT又は入口INの位置を示す位置データ101を記録部7に記録し、その記録されている位置データ101を用いてそれ以降の車両の案内を行うので、同じ出口OUT又は入口INを再度通過する場合に、その出口OUT又は入口INのより正確な位置を用いて案内をすることができる。
【0043】
また、出口OUT又は入口INの位置の検出に用いられる操作が、車両の出口OUT又は入口INの通過に伴って行われるウインカに係る操作であるので、簡易な構成で当該操作の有無を検出することができる。
【0044】
なお、実施例の出口位置の処理においては、駐車場Pを出る際のウインカの操作を用いて車両の位置データ101を生成して記録するタイミングを判定した。これ以外に、一般に駐車場Pから道路Rに出たあとは加速される場合が多いと考えられることから、車両の加速度が所定値以上となったタイミング又は加速のためにアクセルを踏み込んだタイミングを検出することにより、出口OUTの位置を示す位置データ101を生成して記録するタイミングとしてもよい。
【0045】
また同様に、入口位置の検出において、一般に道路Rから駐車場Pに入る際には、車両は減速して徐行又は一時停止する場合が多いと考えられることから、車両の加速度が負の所定値以上となりその後徐行又は一時停止されたタイミング又は減速のためにブレーキを踏み込んだタイミングを検出することにより、入口INの位置を示す位置データ101を生成して記録するタイミングとしてもよい。
【0046】
更に、例えば駐車場Pの出口から直進のまま道路Rに出ることができる場合又は道路Rから直進のまま駐車場Pに入ることができる場合がある。これらの場合でも、出口位置の処理については車両の加速度が所定値以上となったタイミング又は加速のためにアクセルを踏み込んだタイミングを検出することにより、出口OUTの位置を示す位置データ101を生成して記録するタイミングすることができる。また入口位置の処理についても、車両の加速度が負の所定値以上となりその後徐行又は一時停止されたタイミング又は減速のためにブレーキを踏み込んだタイミングを検出することにより、入口INの位置を示す位置データ101を生成して記録するタイミングとすることができる。その他、ハンドルの操作角度が大きい場合や、車両の進行方向の変化量が大きいタイミングを利用したたり、これらを複合的に判断して、出口OUTの位置又は入口INの位置を示す位置データ101を生成して記録するタイミングを検出するようにしてもよい。
【0047】
また、実施例では出口OUT又は入口INの位置を記録部7に記録することとした(上記ステップS6又はS17参照)が、その出口OUT又は入口INが接することとなる道路Rの位置に相当する道路Rのリンクデータを識別するためのリンクIDを、出口OUT又は入口INの位置を示す位置データ101と共に記録部7に記録するように構成することもできる。この場合には、車両の案内処理上においてより詳細にリンクデータまで特定して経路探索処理等を行うことができる。
【0048】
更に、出口OUTと入口INとが共通の駐車場Pについては、同じ位置を示す位置データ101がその駐車場Pの出口OUTと入口INの双方の位置を示すものとして記録部7に記録されることとなる。
【0049】
また、実施例では、地図データに予め駐車場Pを示すデータが地図データに予め収録されている場合を例として説明したが、駐車場Pを示すデータ自体が地図データに収録されていない場合でも、実施例の処理によれば出口OUTの位置を示す位置データ101又は入口INの位置を示す位置データ101を記録部7内の位置処理用データベースDに記録することができる。よって、地図データに収録されていない新しい駐車場等がある場合でも、正確な案内を実施することができる。
【0050】
[変形例]
次に、上述した実施形態及び実施例に対応する変形例について、図5を用いて説明する。以下に説明する変形例は、実施例と同様に、車両に搭載され当該車両の移動を案内するナビゲーション装置における位置検出処理に本願を適用した場合の変形例である。また、図5は変形例に係る処理を示す図である。
【0051】
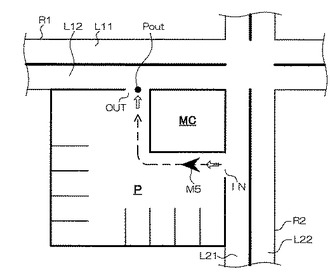
上述した実施例では、道路Rと駐車場Pとを接続する出口OUT又は入口INの位置を決定して記録する場合について説明したが、本願は、図5に例示するように、道路外施設内を単に通過する場合についても適用可能である。
【0052】
即ち図5に例示する場合には、車線L11及びL12を有する片側一車線の道路R1と車線L21及びL22を有する片側一車線の道路R2とが交わる交差点脇に店舗MCがあり、その店舗MCに隣接して駐車場Pが設けられていると共に、店舗MCでは、車両から下車することなく商品等の購入が可能とされている。この場合に車両の運転者は、図5に示す入口INから入って出口OUTから出るまでの間に、車両のエンジンを切ることなく一時停止等をしながら、商品を注文し、代金を支払って商品を受け取る。このとき車両は、自車位置マークM5で示される位置を含んで破線で示される経路を入口INから出口OUTまで移動する。この図5に例示するような場合でも、道路R2から入口INに進入する際には図4に例示したようなウインカの操作が実行され、また出口OUTから道路R1に出る場合は図3に例示したようなウインカの操作が実行される。
【0053】
従って、図5に例示する場合でも、図3に示した入口位置の処理により入口INの正確な位置を示す位置データ101を記録部7に記録し、また図4に示した出口位置の処理により出口OUTの正確な位置を示す位置データ101を記録部7に記録することができる。更に図5に例示する場合には、例えば、入口INに進入した時点で、出口OUTの位置を起点とした経路の再探索を行うことで、出口OUTを出たあとの経路を迅速且つ正確に取得することができる。
【0054】
なお、一つの駐車場Pの入口INの位置を示す位置データ101と出口OUTの位置を示す位置データ101とを対として記録部7に記録させることもできる。これによれば、例えば広大な駐車場Pにおいて駐車区画が複数に分離独立しており、当該駐車区画間で相互に車両の乗り入れができないような場合であっても、それぞれの駐車区画について、実際には駐車場Pからの出口として利用できない出口OUTを出発地とする経路探索が行われること等を防止できる。
【0055】
また、上述した実施例及び変形例の場合には、決定された出口OUT又は入口INの位置を示す位置データ101を記録部7に記録する構成としたが、これ以外に当該位置データ101を、ネットワークNWを介して接続されている図示しない位置データ蓄積装置等に送信して蓄積させるように構成することもできる。この場合には、実施例の出口位置の処理又は入口位置の処理により決定された正確な出口OUT又は入口INの位置を、他のナビゲーション装置等による経路探索等の案内に共用させることができる。
【0056】
更に、上述してきた実施例及び変形例においては、車両に搭載されたナビゲーション装置Sに対して本願を適用した場合について説明したが、これ以外に本願は、例えば、人が携帯してその人の移動を案内するナビゲーション装置に適用することも可能である。この場合、その人が例えば店舗から道に出る際又は道から店舗に入る際に行う特定の操作を予め決めておくことにより、当該特定の操作を本願に係る通過操作とみなして本願を適用することができる。
【符号の説明】
【0057】
1 操作検出手段(ウインカ検出部)
2 位置検出手段(センサ部)
3 決定手段(処理部)
5 通信部
6 操作部
7 記録部
8 ディスクドライブ
9 表示部
100 時刻データ
101 位置データ
102 方位データ
103 ウインカ方向データ
110 位置処理用データ
S 位置処理装置(ナビゲーション装置)
D 位置処理用データベース
P 駐車場
R、R1、R2 道路
IN 入口
OUT 出口
NW ネットワーク
Pout、Pw、Pin 位置
M1、M2、M3、M4、M5 自車位置マーク
【技術分野】
【0001】
本願は、位置処理装置、位置処理方法及び位置処理用プログラムの技術分野に属する。より詳細には、道路と道路外施設との間の接続路の位置についての処理を行う位置処理装置及び位置処理方法並びに当該位置処理装置用プログラムの技術分野に属する。
【背景技術】
【0002】
ナビゲーション装置による例えば車両の案内では、道路外にある駐車場を目的地とした案内や、その駐車場を出発地とした他の目的地への案内が行われることがある。
【0003】
一方近年では、駐車場自体が広大である場合や、道路との関係で駐車場の出入口が複雑な構造となっている場合、あるいは一つの駐車場に対して出口又は入口がそれぞれ複数存在する場合がある。このような場合には、駐車場全体としての代表的な位置(例えば、地図におけるその駐車場の中央の位置)ではなく、その駐車場の入口の位置を目的地としたり、その駐車場の出口を出発地とした具体的且つ正確な案内が望まれる。
【0004】
このとき、その駐車場の入口や出口の位置を示す位置情報が、ナビゲーション装置用の例えば地図データの一部として予め用意されている場合には、その位置情報を用いて上述したような具体的且つ正確な案内を行うことができる。しかしながらこのような位置情報が予め用意されていない場合、上述したような具体的且つ正確な案内ができない。
【0005】
そこで、このような問題点を解決するための従来技術として、例えば下記特許文献1に記載されている技術がある。特許文献1に記載されている技術では、経路誘導中において車両の現在位置を順次特定し、道路外の駐車場に車両が駐車された場合に、道路からの逸脱位置のうち最新のものをその駐車場の入口位置として特定する構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】再公表第WO2007−122926号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1に開示された技術であっても、例えばいわゆるマップマッチング処理上の誤差等の理由により、道路からの逸脱位置が実際の逸脱位置からずれた場合には、駐車場の入口位置を正確に特定することができないという問題点がある。
【0008】
また上記特許文献1では、駐車場の出口の位置を示す位置情報が予め用意されていない場合について、その出口の位置を特定することについては、何ら考慮されていない。更に駐車場の出口から車両が道路に出る場合、その案内処理上においては、出口を通って出た道路上に車両の現在位置がマッチングされるまで、実際に車両がその道路に出たタイミングから所定の時間がかかる場合が多い。このような場合に、仮に車両の現在位置がマッチングされた道路の位置をその駐車場の出口の位置として特定するとしても、上記所定の時間分の位置誤差が含まれてしまうという問題点がある。
【0009】
そこで本願は、上記の各問題点に鑑みて為されたもので、その課題の一例は、駐車場の出口及び入口をそれぞれ示す位置情報が予め用意されていない場合であっても、より正確に出口又は入口それぞれの位置を特定することが可能な位置処理装置及び位置処理方法並びに当該位置処理装置用プログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するために、請求項1に記載の発明は、道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出するウインカ検出部等の操作検出手段と、前記通過操作が行われた位置を検出するセンサ部等の位置検出手段と、前記検出された位置を、前記接続路の位置として決定する処理部等の決定手段と、を備える。
【0011】
上記の課題を解決するために、請求項9に記載の発明は、道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出する操作検出工程と、前記通過操作が行われた位置を検出する位置検出工程と、前記検出された位置を、前記接続路の位置として決定する決定工程と、を含む。
【0012】
上記の課題を解決するために、請求項10に記載の発明は、コンピュータを、請求項1から請求項8のいずれか一項に記載の位置処理装置として機能させる。
【図面の簡単な説明】
【0013】
【図1】実施形態に係る位置処理装置の概要構成を示すブロック図である。
【図2】実施例に係るナビゲーション装置の概要構成を示す図であり、(a)は当該概要構成を示すブロック図であり、(b)は実施例に係る位置処理用データベースを例示する図である。
【図3】実施例に係る出口位置の処理を示す図であり、(a)は当該出口位置の処理を示すフローチャートであり、(b)は当該出口位置の処理を説明する概念図である。
【図4】実施例に係る入口位置の処理を示す図であり、(a)は当該入口位置の処理を示すフローチャートであり、(b)は当該入口位置の処理を説明する概念図である。
【図5】変形例に係る出口位置の処理を説明する概念図である。
【発明を実施するための形態】
【0014】
次に、本願を実施するための形態について、図1を用いて説明する。なお図1は、実施形態に係る位置処理装置の概要構成を示すブロック図である。
【0015】
図1に示すように、実施形態に係る位置処理装置Sは、操作検出手段1と、位置検出手段2と、決定手段3と、を備えて構成されている。
【0016】
この構成において操作検出手段1は、道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出し、その検出結果を位置検出手段2に出力する。ここで「道路外施設」とは、例えば位置処理装置Sが車両に搭載されている場合にあっては、その車両の駐車場や、一時的に立ち寄って運転者が物品の購入をする施設等である。また「接続路」とは、同様の場合にあっては、道路からその道路外施設への入口、又はその道路外施設から道路へ戻るための出口等である。更に「通過操作」とは、同様の場合にあっては、例えば道路から道路外施設に入るためのウインカ操作や車両を減速させるためのブレーキ操作等である。
【0017】
位置検出手段2は、操作検出手段1における検出結果に基づいて、上記通過操作が行われたことが検出されたとき、その通過操作が行われた位置を検出し、その検出結果を決定手段3に出力する。上記の例で言えば、例えばウインカ操作が行われた位置を検出し、その検出結果を決定手段3に出力する。
【0018】
これにより決定手段3は、位置検出手段2における検出結果に基づいて、その検出された位置を、接続路の位置として決定する。すなわち例えば、接続路が道路外施設から道路への出口である場合にあっては、その道路へ出るための通過操作が行われた位置を、その出口の位置として決定する。この決定された位置を示す位置情報は、例えば位置処理装置Sが備えられた車両の案内に後ほど用いるために記録されたり、あるいは他の車両の案内に供させるために外部の位置情報記憶装置に送信されて記録されたりする。
【0019】
以上説明したように、実施形態に係る位置処理装置Sの動作によれば、道路と道路外施設との間の接続路の通過に伴う通過操作が行われた位置を接続路の位置として決定するので、接続路の位置を示す位置情報がない場合でも、接続路の位置をより正確に決定することができる。
【実施例】
【0020】
次に、上述した実施形態に対応する具体的な実施例について、図2乃至図4を用いて説明する。なお以下に説明する実施例は、車両に搭載され当該車両の移動を案内するナビゲーション装置における位置検出処理に本願を適用した場合の実施例である。
【0021】
また、図2は実施例に係るナビゲーション装置の概要構成を示す図であり、図3は実施例に係る出口位置の処理を示す図であり、図4は実施例に係る入口位置の処理を示す図である。このとき図2(a)では、図1に示した実施形態に係る位置処理装置Sにおける各構成部材に対応する実施例の構成部材それぞれについて、当該位置処理装置Sにおける各構成部材と同一の部材番号を用いている。
【0022】
図2(a)に示すように、位置処理装置Sの一例としての実施例に係るナビゲーション装置Sは、操作検出手段1の一例としてのウインカ検出部1と、位置検出手段2の一例としてのセンサ部2と、CPU、RAM(Random Access Memory)及びROM(Read Only Memory)等を含む決定手段3の一例、移動検出手段の一例及び案内手段の一例としての処理部3と、メモリ4と、通信部5と、操作部6と、記憶手段の一例及び接続路位置記憶手段の一例としての記録部7と、ディスクドライブ8と、表示部9と、を備えて構成されている。このとき、ウインカ検出部1、センサ部2、処理部3、通信部5、操作部6、記録部7、ディスクドライブ8及び表示部9は、バス10を介して相互にデータの授受が可能とされている。
【0023】
この構成においてウインカ検出部1は、車両の運転者によりウインカを出す操作が行われている否かを、ウインカが出されている方向(右又は左)と共に検出する。このウインカを出す操作が、本願における「通過操作」の一例に相当する。
【0024】
一方センサ部2は、図示しない車速パルス検出部、加速度センサ、ジャイロセンサ及びGPS(Global Positioning System)センサ等を含んで構成されている。このうち車速パルス検出部は、車両に備えられた車輪の回転に応じた間隔で出力される車速パルスを検出する。この車速パルスは、例えば車両の速度や移動距離の算出に用いられる。加速度センサは、車両の移動に伴って当該車両に加わる加速度を検出する。この加速度は、それを一回積分することによる速度の算出に用いられ、更にそれをもう一度積分することによる移動距離の算出に用いられる。ジャイロセンサは、車両の進行方向及びその変化を検出する。GPSセンサは、衛星軌道上のGPS衛星からの航法電波を受信し、ナビゲーション装置Sが搭載されている車両の位置、高度、速度等を検出する。このGPSセンサからの出力は、例えば加速度センサ及びジャイロセンサそれぞれにおける検索結果を用いた自立航法における位置誤差等の補正等に用いられる。
【0025】
通信部5は、外部の例えばインターネット等のネットワークNWと無線により接続され、車両の案内に必要な渋滞情報や天気情報等を取得する。操作部6は、リモートコントロール装置及び操作ボタン等を含んで構成されており、ナビゲーション装置Sに対する使用者又は運転者の入力操作に対応する操作信号を出力する。ディスクドライブ8は、挿入されたディスクDKに対する必要なデータの記録及び再生に用いられる。記録部7は、例えばハードディスク等の不揮発性の記録媒体を含んで構成されており、車両の案内に必要な地図データや音声データ等のナビゲーション用データの他、実施例に係る後述する出口位置の処理及び入口位置の処理を行うためのプログラムが不揮発性に記憶されている。なおこれらのプログラムは、通信部5を介してネットワークNWから取得するようにしてもよいし、ディスクDKに予め記録されている当該プログラムをディスクDKから読み出して取得することもできる。液晶ディスプレイ等からなる表示部9は、地図等、車両の案内のために必要な情報を表示する。
【0026】
以上の構成において処理部3は、メモリ4との間で必要なデータの授受を行いつつ、以下に説明する実施例に係る出口位置の処理及び入口位置の処理を含む車両の案内のための処理、具体的には、現在位置検出処理、地図上の道路データへのマップマッチング処理及び経路探索処理等を統括制御する。
【0027】
次に、記録部7に逐次記録される、実施例に係る位置処理用データベースについて、図2(b)を用いて説明する。
【0028】
図2(b)に例示するように、実施例に係る位置処理用データベースDとしては、時刻データ100、位置データ101、方位データ102及びウインカ方向データ103を一組とする位置処理用データ110が、ウインカの操作に対応した後述するタイミング毎に生成されて蓄積される。このとき時刻データ100は、ウインカが操作されていると判定された時刻を示すデータであり、位置データ101は、ウインカが操作されていると判定された時刻における車両の位置を示すデータである。また方位データ102は、ウインカが操作されていると判定された時刻における車両の方位(進行方位)を、例えば北を0°/360°として示すデータである。ウインカ方向データ103は、操作されていると判定されたウインカの方向を示すデータである。これら位置処理用データ110の生成タイミング等については、後ほど詳説する。
【0029】
次に、処理部3を中心として実行される実施例に係る出口位置の処理について、具体的に図2及び図3を用いて説明する。以下に説明する出口位置の処理は、「道路外施設」の一例に相当する駐車場から、その出口を介して、その駐車場に接している道路に出る際に行われる処理である。
【0030】
実施例に係る出口位置の処理は、図3(a)に示すように、オフロード状態において、例えば所定の時間毎に開始される処理である。ここで「オフロード状態」とは、ナビゲーション装置Sが搭載されている車両の現在位置が、地図データにおいて道路外にある上記駐車場にある状態をいう。実施例に係る出口位置の処理として処理部3は、オフロード状態において、従来と同様の方法によりナビゲーション装置Sが搭載されている車両の現在位置を検出する(ステップS1)。ステップS1の処理には、センサ部2からの出力に基づいた現在位置の検出処理と、地図データに基づいたマップマッチング処理が含まれている。次に処理部3は、ウインカ検出部1からの出力に基づいて、ウインカを出す操作が運転者により行われているか否かを判定する(ステップS2)。ステップS2においてウインカを出す操作が行われてないと判定された場合(ステップS2;NO)、処理部3は後述するステップS4の処理に移行する。一方ステップS2においてウインカを出す操作が行われていると判定された場合(ステップS2;YES)、処理部3は、当該判定がされた時刻を示す時刻データ100、その時刻における車両の現在位置を示す位置データ101及びその時刻に出されているウインカの方向を示す方位データ102を含む位置処理用データ110を生成し、図2(b)に例示する位置処理用データベースDに追加して記録部7に記録する(ステップS3)。このステップS3の処理により、位置処理用データベースDに新しい位置処理用データ110が一つ追加されることとなる。
【0031】
次に処理部3は、実施例に係る駐車場から、それに接する道路へと現在位置がマップマッチングされたか否かを判定する(ステップS4)。このステップS4の処理は、従来のマップマッチングと同様の手法により行われる。ステップS4において現在位置が道路へマップマッチングされていないと判定された場合、即ち、車両が未だ駐車場から道路に出ていないと判定された場合(ステップS4;NO)、処理部3は上記ステップS1の処理に移行する。この後、上記ステップS1、S2及びS3の処理が繰り返されることにより、位置処理用データベースD内に位置処理用データ110が新たに追加されることとなる。一方、ステップS4において現在位置が道路へマップマッチングされたと判定された場合、即ち、車両が駐車場から道路に出たと判定された場合(ステップS4;YES)、処理部3は、道路以外の位置(例えば、後述の図3(b)に示す位置Pout)で、道路への復帰方向に出されたウインカがあるか否かを、位置処理用データベースDを参照することにより判定する(ステップS5)。ここで「復帰方向」とは、駐車場から道路へ出るときに右折により出た場合には当該「復帰方向」は「右」であり、また同様に左折により道路に出た場合には「左」である。この復帰方向について処理部3は、例えば、ウインカを出す操作が行われたと判定されたタイミング(上記ステップS2参照)における車両の方位変化の判定、現在の車両の進行方位(即ち道路の方位)と地図データ上におけるその道路の方位との比較判定、又は、ウインカを出す操作が行われたと判定されたタイミングにおける車両の位置と道路上にある車両の現在位置との相対的な比較判定等の手法により、復帰方向が「右」であるか「左」であるかを判定する。そして、ステップS5の判定において処理部3は、この復帰方向と一致する方向に出されていたウインカの有無を、位置処理用データベースDの特にウインカ方向データ103を参照して判定する。ステップS5において道路への復帰方向に出されたウインカがないと判定された場合(ステップS5;NO)、処理部3は実施例の出口位置の処理を終了し、元の案内処理に移行する。
【0032】
一方ステップS5において道路への復帰方向に出されたウインカがあると判定された場合(ステップS5;YES)、処理部3は、道路への復帰方向に出されたウインカのうち、最後にウインカをその復帰方向に出したタイミングにおける車両の位置を、駐車場の出口の位置として決定し、記録部7の例えば地図データ内に記録する(ステップS6)。このステップS6の処理について具体的に処理部3は、位置処理用データ110における時刻データ100を参照して、最後に(即ち最も新しく)復帰方向に出されたウインカのウインカ方向データ103を含む位置処理用データ110を検索し、その位置処理用データ110に含まれている位置データ101により示される位置を、駐車場の出口の位置として記録部7に記録する。その後処理部3は実施例の出口位置の処理を終了し、元の案内処理に移行する。
【0033】
次に、上述してきた出口位置の処理について、より具体的に図3(b)に例示しつつ説明する。図3(b)において、道路Rは車線L1及びL2を有する片側一車線の道路であり、駐車場Pがそれに接している。道路Rと駐車場Pとの間には、本願における「接続路」の一例として、入口INと出口OUTが設けられている。入口INには例えば発券機Cinが、出口OUTには例えば精算機Coutが、それぞれ設置されている。そして、駐車場P内の自車位置マークM1により示される位置から出口OUTを介して駐車場Pを出て道路R上の自車位置マークM2により示される位置まで、車両が移動したとする。この場合における実施例に係る出口位置の処理としては、駐車場P内において現在位置が検出され(上記ステップS1参照)、更に出口OUTから左折により道路Rに出るために出口OUT付近(例えば、図3(b)に示す位置Pout)でウインカを左に出す操作が行われる(上記ステップS2;YES参照)。このときに、ウインカを出したタイミングに対応する上記位置処理用データ110が位置処理用データベースDに追加される(上記ステップS3参照)。そして、道路Rへのマップマッチングがされたと判定されたタイミングにおいて(上記ステップS4;YES参照)、最後に左にウインカを出す操作が行われたタイミングにおける車両の位置(例えば上記位置Pout)が、出口OUTの位置として地図データ内に記録される(上記ステップS5及びS6参照)。このとき、実際の車両の移動軌跡Tout(図3(b)において破線で示す)に対して、例えば道路Rへのマップマッチングにおける遅延又は誤差により、案内処理(表示部9における表示)上の車両の移動軌跡が図3(b)において点線で示す移動軌跡Trとなったとしても、出口OUTの位置は、例えば道路Rへマップマッチングされた位置マークM2近傍の位置ではなく、位置Poutとして正しく地図データに記録されることとなる。
【0034】
次に、処理部3を中心として実行される実施例に係る入口位置の処理について、具体的に図2及び図4を用いて説明する。以下に説明する入口位置の処理は、道路から、その道路に接している駐車場に入口を介して進入する際に行われる処理である。
【0035】
実施例に係る入口位置の処理は、図4(a)に示すように、オンロード状態において、例えば所定の時間毎に開始される処理である。ここで「オンロード状態」とは、車両の現在位置が、地図データにおいて道路上にマップマッチングされている状態をいう。実施例に係る入口位置の処理として処理部3は、オンロード状態において、従来と同様の方法によりナビゲーション装置Sが搭載されている車両の現在位置を検出する(ステップS10)。ステップS10の処理には、出口位置の処理の場合と同様に、センサ部2からの出力に基づいた現在位置の検出処理と、地図データに基づいたマップマッチング処理が含まれている。次に処理部3は、ウインカ検出部1からの出力に基づいて、ウインカの出し始めとなったか否かを判定する(ステップS11)。このステップS11の判定として具体的に処理部3は、例えば、ウインカを出し始める際の操作が運転者により行われたか否かを判定する。ここで、「ウインカを出し始める際の操作」とは、具体的には、左折又は右折する場合において左方向又は右方向に向けてウインカを出すために、車両の運転者が行うウインカスイッチ(通常はハンドル脇にあるウインカスイッチ)の操作である。ステップS11においてウインカの出し始めではないと判定された場合(ステップS11;NO)、処理部3は後述するステップS13の処理に移行する。一方ステップS11においてウインカの出し始めであると判定された場合(ステップS11;YES)、処理部3は、当該判定がされた時刻を示す時刻データ100、その時刻における車両の現在位置を示す位置データ101及びその時刻以降に出されたウインカの方向を示す方位データ102を含む位置処理用データ110を生成し、図2(b)に例示する位置処理用データベースDに追加して記録部7に記録する(ステップS12)。このステップS12の処理により、位置処理用データベースDに新しい位置処理用データ110が一つ追加されることとなる。一方、ステップS11においてウインカの出し始めでないと判定された場合(ステップS11;NO)、処理部3は次に、ウインカ検出部1からの出力に基づいて、ウインカの出し終わりとなったか否かを判定する(ステップS13)。このステップS13の判定として具体的に処理部3は、例えば、後述するステップS15の処理を経て再度上記ステップS10の処理に戻った場合において、前回のステップS10及びS11の処理においてウインカが出されていたものが、今回のステップS13の判定のタイミングにおいてそのウインカが出されていないことをもって、ウインカの出し終わりとなったかを判定すればよい。この他、例えば、ウインカを出し終える際の操作が運転者により行われたか否かにより、ウインカの出し終わりとなったか否かを判定してもよい。ここで、「ウインカを出し終える際の操作」とは、具体的には、左折又は右折中において行っていた左方向又は右方向のウインカの点滅を停止させるために、車両の運転者が行う操作である。なお一般に上記ウインカスイッチは、曲がっている方向からハンドルを戻すことにより自動的に中立の位置に戻る構造となっている。よって上記の「ウインカを出し終える際の操作」とは、一般には曲がっている方向からハンドルを戻す操作である。ステップS13においてウインカの出し終わりでないと判定された場合(ステップS13;NO)、処理部3は後述するステップS15の処理に移行する。一方ステップS13においてウインカの出し終わりであると判定された場合(ステップS13;YES)、処理部3は、当該判定がされた時刻を示す時刻データ100、その時刻における車両の現在位置を示す位置データ101及びその時刻まで出されていたウインカの方向を示す方位データ102を含む位置処理用データ110を生成し、図2(b)に例示する位置処理用データベースDに追加して記録部7に記録する(ステップS14)。このステップS14の処理により、位置処理用データベースDに新しい位置処理用データ110が更に一つ追加されることとなる。
【0036】
次に処理部3は、実施例に係る道路から外れ、それに接する駐車場へと現在位置が移動したか否かを判定する(ステップS15)。このステップS15の処理は従来の現在位置検出処理と同様の手法により行われる。ステップS15において現在位置が駐車場へ移動していないと判定された場合、即ち、車両が未だ道路にマップマッチングされ、道路から駐車場に入っていないと判定された場合(ステップS15;NO)、処理部3は上記ステップS10の処理に移行する。この後、上記ステップS10乃至S14の処理が繰り返されることにより、位置処理用データベースD内に位置処理用データ110が逐次追加されることとなる。一方、ステップS15において現在位置が道路から外れ、駐車場へ移動したと判定された場合、即ち、車両が道路から駐車場に入ったと判定された場合(ステップS15;YES)、処理部3は、道路上の位置(例えば、後述の図4(b)に示す位置Pw)で、駐車場への進入方向に出されたウインカがあるか否かを、位置処理用データベースDを参照することにより判定する(ステップS16)。ここで「進入方向」とは、道路から駐車場へ入るときに右折により入った場合には当該「進入方向」は「右」であり、また同様に左折により駐車場に入った場合には「左」である。この進入方向について処理部3は、例えば、ウインカの出し始めと判定されたタイミングからウインカの出し終わりと判定されたタイミングまでの間(上記ステップS11及びS13参照)における車両の方位変化の判定、車両の現在の方位と駐車場への進入直前に現在位置が存在していた道路の方位との差を用いた判定、又は、ウインカの出し始めと判定されたタイミングにおける車両の位置と現在位置(ステップS15の判定により駐車場内であることになる)との相対的な比較判定等の手法により、進入方向が「右」であるか「左」であるかを判定する。そして、ステップS16の判定において処理部3は、この進入方向と一致する方向に出されていたウインカの有無を、位置処理用データベースDの特にウインカ方向データ103を参照して判定する。ステップS16において駐車場への進入方向に出されたウインカがないと判定された場合(ステップS16;NO)、処理部3は実施例の入口位置の処理を終了し、元の案内処理に移行する。
【0037】
一方ステップS16において駐車場への進入方向に出されたウインカがあると判定された場合(ステップS16;YES)、処理部3は、駐車場への進入方向に出されていたウインカの出し終わりであると判定されたタイミングにおける車両の位置を、駐車場の入口の位置として決定し、記録部7の例えば地図データ内に記録する(ステップS17)。このステップS17の処理について具体的に処理部3は、位置処理用データ110における時刻データ100を参照して、最後に(即ち最も新しく)進入方向に出されていたウインカのウインカ方向データ103を含む位置処理用データ110を検索し、その位置処理用データ110に含まれている位置データ101により示される位置を、駐車場の入口の位置として記録する。その後処理部3は実施例の入口位置の処理を終了し、元の案内処理に移行する。
【0038】
次に、上述してきた入口位置の処理について、より具体的に図4(b)に例示しつつ説明する。図4(b)において、図3(b)に例示したものと同様の道路R等については、同様の符号を付して細部の説明は省略する。車両が、道路R上の自車位置マークM3により示される位置から入口INを介して駐車場Pに入り、自車位置マークM4により示される位置まで移動したとする。この場合における実施例に係る入口位置の処理としては、道路R上において現在位置が検出され(上記ステップS10参照)、更に入口INから左折により駐車場Pに入るために入口INの手前の道路Rの例えば位置Pwでウインカを左に出し始める際の操作が行われる(上記ステップS11;YES参照)。このとき、ウインカの出し始めと判定されたタイミングに対応する上記位置処理用データ110が位置処理用データベースDに追加される(上記ステップS12参照)。更に車両が実際に左折して入口INに入る際には、その手前の位置Pinでウインカの出し終わりが判定される(上記ステップS13;YES参照)。このとき、ウインカの出し終わりと判定されたタイミングに対応する上記位置処理用データ110(上記位置Pinを示す位置データ101を含む)が位置処理用データベースDに追加される(上記ステップS14参照)。そして、道路Rから外れ、駐車場Pへ入ったと判定されたタイミングにおいて(上記ステップS15;YES参照)、最後にウインカを出し終えたタイミングにおける車両の位置(上記位置Pin)が、入口INの位置として地図データ内に記録される(上記ステップS16及びS17参照)。このとき、実際の車両の移動軌跡Tin(図4(b)において破線で示す)に対して、例えばマップマッチングにおける遅延又は誤差により、案内処理(表示部9における表示)上において道路Rから外れて駐車場Pへ入った地点を含む車両の移動軌跡が図4(b)において点線で示す移動軌跡Trとなったとしても、入口INの位置は、例えば駐車場Pへ入った位置マークM4近傍の位置ではなく、位置Pinとして正しく地図データに記録されることとなる。
【0039】
以上それぞれ説明したように、実施例に係る出口位置の処理又は入口位置の処理によれば、道路Rと駐車場Pとの間の出口OUT又は入口INの通過に伴うウインカの操作が行われた位置を出口OUT又は入口INの位置として決定して記録するので、出口OUT又は入口INの位置を示す位置データが地図データ内に用意されていない場合でも、出口OUT又は入口INの位置をより正確に決定して記録することができる。
【0040】
また、図3に示す出口位置の処理の場合には、駐車場Pから道路Rへ出る際の出口OUTの通過に伴うウインカの操作が行われたことが検出されたタイミングにおける位置を示す位置データ101を記録部7に記録すると共に、駐車場Pから道路Rへ出たか否かを検出し、当該出たことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて記憶されている位置を出口OUTの位置として決定して記録するので、駐車場Pから道路Rへの出口OUTの位置をより正確に決定することができる。
【0041】
更に、図4に示す入口処理の場合には、道路Rから道路外の駐車場Pへ入る際の入口INの通過に伴ってウインカの出し終わりと判定されたタイミングにおける位置を示す位置データ101を記録部7に記録すると共に、道路Rから駐車場Pへ入ったか否かを検出し、道路Rから駐車場Pへ入ったことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて記憶されている位置を入口INの位置として決定して記録するので、道路Rから駐車場Pへの入口INの位置をより正確に決定することができる。
【0042】
更にまた、決定された出口OUT又は入口INの位置を示す位置データ101を記録部7に記録し、その記録されている位置データ101を用いてそれ以降の車両の案内を行うので、同じ出口OUT又は入口INを再度通過する場合に、その出口OUT又は入口INのより正確な位置を用いて案内をすることができる。
【0043】
また、出口OUT又は入口INの位置の検出に用いられる操作が、車両の出口OUT又は入口INの通過に伴って行われるウインカに係る操作であるので、簡易な構成で当該操作の有無を検出することができる。
【0044】
なお、実施例の出口位置の処理においては、駐車場Pを出る際のウインカの操作を用いて車両の位置データ101を生成して記録するタイミングを判定した。これ以外に、一般に駐車場Pから道路Rに出たあとは加速される場合が多いと考えられることから、車両の加速度が所定値以上となったタイミング又は加速のためにアクセルを踏み込んだタイミングを検出することにより、出口OUTの位置を示す位置データ101を生成して記録するタイミングとしてもよい。
【0045】
また同様に、入口位置の検出において、一般に道路Rから駐車場Pに入る際には、車両は減速して徐行又は一時停止する場合が多いと考えられることから、車両の加速度が負の所定値以上となりその後徐行又は一時停止されたタイミング又は減速のためにブレーキを踏み込んだタイミングを検出することにより、入口INの位置を示す位置データ101を生成して記録するタイミングとしてもよい。
【0046】
更に、例えば駐車場Pの出口から直進のまま道路Rに出ることができる場合又は道路Rから直進のまま駐車場Pに入ることができる場合がある。これらの場合でも、出口位置の処理については車両の加速度が所定値以上となったタイミング又は加速のためにアクセルを踏み込んだタイミングを検出することにより、出口OUTの位置を示す位置データ101を生成して記録するタイミングすることができる。また入口位置の処理についても、車両の加速度が負の所定値以上となりその後徐行又は一時停止されたタイミング又は減速のためにブレーキを踏み込んだタイミングを検出することにより、入口INの位置を示す位置データ101を生成して記録するタイミングとすることができる。その他、ハンドルの操作角度が大きい場合や、車両の進行方向の変化量が大きいタイミングを利用したたり、これらを複合的に判断して、出口OUTの位置又は入口INの位置を示す位置データ101を生成して記録するタイミングを検出するようにしてもよい。
【0047】
また、実施例では出口OUT又は入口INの位置を記録部7に記録することとした(上記ステップS6又はS17参照)が、その出口OUT又は入口INが接することとなる道路Rの位置に相当する道路Rのリンクデータを識別するためのリンクIDを、出口OUT又は入口INの位置を示す位置データ101と共に記録部7に記録するように構成することもできる。この場合には、車両の案内処理上においてより詳細にリンクデータまで特定して経路探索処理等を行うことができる。
【0048】
更に、出口OUTと入口INとが共通の駐車場Pについては、同じ位置を示す位置データ101がその駐車場Pの出口OUTと入口INの双方の位置を示すものとして記録部7に記録されることとなる。
【0049】
また、実施例では、地図データに予め駐車場Pを示すデータが地図データに予め収録されている場合を例として説明したが、駐車場Pを示すデータ自体が地図データに収録されていない場合でも、実施例の処理によれば出口OUTの位置を示す位置データ101又は入口INの位置を示す位置データ101を記録部7内の位置処理用データベースDに記録することができる。よって、地図データに収録されていない新しい駐車場等がある場合でも、正確な案内を実施することができる。
【0050】
[変形例]
次に、上述した実施形態及び実施例に対応する変形例について、図5を用いて説明する。以下に説明する変形例は、実施例と同様に、車両に搭載され当該車両の移動を案内するナビゲーション装置における位置検出処理に本願を適用した場合の変形例である。また、図5は変形例に係る処理を示す図である。
【0051】
上述した実施例では、道路Rと駐車場Pとを接続する出口OUT又は入口INの位置を決定して記録する場合について説明したが、本願は、図5に例示するように、道路外施設内を単に通過する場合についても適用可能である。
【0052】
即ち図5に例示する場合には、車線L11及びL12を有する片側一車線の道路R1と車線L21及びL22を有する片側一車線の道路R2とが交わる交差点脇に店舗MCがあり、その店舗MCに隣接して駐車場Pが設けられていると共に、店舗MCでは、車両から下車することなく商品等の購入が可能とされている。この場合に車両の運転者は、図5に示す入口INから入って出口OUTから出るまでの間に、車両のエンジンを切ることなく一時停止等をしながら、商品を注文し、代金を支払って商品を受け取る。このとき車両は、自車位置マークM5で示される位置を含んで破線で示される経路を入口INから出口OUTまで移動する。この図5に例示するような場合でも、道路R2から入口INに進入する際には図4に例示したようなウインカの操作が実行され、また出口OUTから道路R1に出る場合は図3に例示したようなウインカの操作が実行される。
【0053】
従って、図5に例示する場合でも、図3に示した入口位置の処理により入口INの正確な位置を示す位置データ101を記録部7に記録し、また図4に示した出口位置の処理により出口OUTの正確な位置を示す位置データ101を記録部7に記録することができる。更に図5に例示する場合には、例えば、入口INに進入した時点で、出口OUTの位置を起点とした経路の再探索を行うことで、出口OUTを出たあとの経路を迅速且つ正確に取得することができる。
【0054】
なお、一つの駐車場Pの入口INの位置を示す位置データ101と出口OUTの位置を示す位置データ101とを対として記録部7に記録させることもできる。これによれば、例えば広大な駐車場Pにおいて駐車区画が複数に分離独立しており、当該駐車区画間で相互に車両の乗り入れができないような場合であっても、それぞれの駐車区画について、実際には駐車場Pからの出口として利用できない出口OUTを出発地とする経路探索が行われること等を防止できる。
【0055】
また、上述した実施例及び変形例の場合には、決定された出口OUT又は入口INの位置を示す位置データ101を記録部7に記録する構成としたが、これ以外に当該位置データ101を、ネットワークNWを介して接続されている図示しない位置データ蓄積装置等に送信して蓄積させるように構成することもできる。この場合には、実施例の出口位置の処理又は入口位置の処理により決定された正確な出口OUT又は入口INの位置を、他のナビゲーション装置等による経路探索等の案内に共用させることができる。
【0056】
更に、上述してきた実施例及び変形例においては、車両に搭載されたナビゲーション装置Sに対して本願を適用した場合について説明したが、これ以外に本願は、例えば、人が携帯してその人の移動を案内するナビゲーション装置に適用することも可能である。この場合、その人が例えば店舗から道に出る際又は道から店舗に入る際に行う特定の操作を予め決めておくことにより、当該特定の操作を本願に係る通過操作とみなして本願を適用することができる。
【符号の説明】
【0057】
1 操作検出手段(ウインカ検出部)
2 位置検出手段(センサ部)
3 決定手段(処理部)
5 通信部
6 操作部
7 記録部
8 ディスクドライブ
9 表示部
100 時刻データ
101 位置データ
102 方位データ
103 ウインカ方向データ
110 位置処理用データ
S 位置処理装置(ナビゲーション装置)
D 位置処理用データベース
P 駐車場
R、R1、R2 道路
IN 入口
OUT 出口
NW ネットワーク
Pout、Pw、Pin 位置
M1、M2、M3、M4、M5 自車位置マーク
【特許請求の範囲】
【請求項1】
道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出する操作検出手段と、
前記通過操作が行われた位置を検出する位置検出手段と、
前記検出された位置を、前記接続路の位置として決定する決定手段と、
を備えることを特徴とする位置処理装置。
【請求項2】
請求項1に記載の位置処理装置において、
前記位置検出手段は、前記道路外施設から前記道路へ移動する際の前記接続路の前記通過に伴う前記通過操作が行われたことが検出されたタイミングにおける前記位置を検出し、
前記位置処理装置は、
前記検出された位置を記憶する記憶手段と、
前記道路外施設から前記道路へ移動したか否かを検出する移動検出手段と、
を更に備え、
前記決定手段は、前記道路外施設から前記道路へ移動したことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて前記記憶手段に記憶されている前記位置を、前記接続路の位置として決定することを特徴とする位置処理装置。
【請求項3】
請求項2に記載の位置処理装置において、
前記道路外施設は移動体用施設であり、
前記接続路は当該移動体用施設から前記道路への出口であり、
前記通過操作は当該移動体用施設から当該道路へ出る移動体において実行される通過操作であることを特徴とする位置処理装置。
【請求項4】
請求項1に記載の位置処理装置において、
前記位置検出手段は、前記道路から当該道路外へ移動する際の前記接続路の前記通過に伴う前記通過操作が行われたことが検出されたタイミングにおける前記位置を検出し、
前記位置処理装置は、
前記検出された位置を記憶する記憶手段と、
前記道路から当該道路外へ移動したか否かを検出する移動検出手段と、
を更に備え、
前記決定手段は、前記道路から当該道路外へ移動したことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて前記記憶手段に記憶されている前記位置を、前記接続路の位置として決定することを特徴とする位置処理装置。
【請求項5】
請求項4に記載の位置処理装置において、
前記道路外には移動体用施設があり、
前記接続路は前記道路から当該移動体用施設への入口であり、
前記通過操作は当該道路から当該駐車施設へ入る移動体において実行される通過操作であることを特徴とする位置処理装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載の位置処理装置において、
前記決定された接続路の位置を記憶する接続路位置記憶手段と、
前記記憶されている位置を用いて移動体の移動案内を行う案内手段と、
を更に備えることを特徴とする位置処理装置。
【請求項7】
請求項1から請求項5のいずれか一項に記載の位置処理装置において、
前記決定された接続路の位置を示す位置情報を、外部の位置情報記憶装置に送信して記憶させる送信手段を更に備えることを特徴とする位置処理装置。
【請求項8】
請求項1から請求項7のいずれか一項に記載の位置処理装置において、
前記通過操作は、車両の前記接続路の通過に伴って当該車両において行われるウインカ操作であることを特徴とする位置処理装置。
【請求項9】
道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出する操作検出工程と、
前記通過操作が行われた位置を検出する位置検出工程と、
前記検出された位置を、前記接続路の位置として決定する決定工程と、
を含むことを特徴とする位置処理方法。
【請求項10】
コンピュータを、請求項1から請求項8のいずれか一項に記載の位置処理装置として機能させることを特徴とする位置処理用プログラム。
【請求項1】
道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出する操作検出手段と、
前記通過操作が行われた位置を検出する位置検出手段と、
前記検出された位置を、前記接続路の位置として決定する決定手段と、
を備えることを特徴とする位置処理装置。
【請求項2】
請求項1に記載の位置処理装置において、
前記位置検出手段は、前記道路外施設から前記道路へ移動する際の前記接続路の前記通過に伴う前記通過操作が行われたことが検出されたタイミングにおける前記位置を検出し、
前記位置処理装置は、
前記検出された位置を記憶する記憶手段と、
前記道路外施設から前記道路へ移動したか否かを検出する移動検出手段と、
を更に備え、
前記決定手段は、前記道路外施設から前記道路へ移動したことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて前記記憶手段に記憶されている前記位置を、前記接続路の位置として決定することを特徴とする位置処理装置。
【請求項3】
請求項2に記載の位置処理装置において、
前記道路外施設は移動体用施設であり、
前記接続路は当該移動体用施設から前記道路への出口であり、
前記通過操作は当該移動体用施設から当該道路へ出る移動体において実行される通過操作であることを特徴とする位置処理装置。
【請求項4】
請求項1に記載の位置処理装置において、
前記位置検出手段は、前記道路から当該道路外へ移動する際の前記接続路の前記通過に伴う前記通過操作が行われたことが検出されたタイミングにおける前記位置を検出し、
前記位置処理装置は、
前記検出された位置を記憶する記憶手段と、
前記道路から当該道路外へ移動したか否かを検出する移動検出手段と、
を更に備え、
前記決定手段は、前記道路から当該道路外へ移動したことが検出されたタイミングより前で且つ当該タイミングに最も近いタイミングにおいて検出されて前記記憶手段に記憶されている前記位置を、前記接続路の位置として決定することを特徴とする位置処理装置。
【請求項5】
請求項4に記載の位置処理装置において、
前記道路外には移動体用施設があり、
前記接続路は前記道路から当該移動体用施設への入口であり、
前記通過操作は当該道路から当該駐車施設へ入る移動体において実行される通過操作であることを特徴とする位置処理装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載の位置処理装置において、
前記決定された接続路の位置を記憶する接続路位置記憶手段と、
前記記憶されている位置を用いて移動体の移動案内を行う案内手段と、
を更に備えることを特徴とする位置処理装置。
【請求項7】
請求項1から請求項5のいずれか一項に記載の位置処理装置において、
前記決定された接続路の位置を示す位置情報を、外部の位置情報記憶装置に送信して記憶させる送信手段を更に備えることを特徴とする位置処理装置。
【請求項8】
請求項1から請求項7のいずれか一項に記載の位置処理装置において、
前記通過操作は、車両の前記接続路の通過に伴って当該車両において行われるウインカ操作であることを特徴とする位置処理装置。
【請求項9】
道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出する操作検出工程と、
前記通過操作が行われた位置を検出する位置検出工程と、
前記検出された位置を、前記接続路の位置として決定する決定工程と、
を含むことを特徴とする位置処理方法。
【請求項10】
コンピュータを、請求項1から請求項8のいずれか一項に記載の位置処理装置として機能させることを特徴とする位置処理用プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−215416(P2012−215416A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−79552(P2011−79552)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]