
位置判定システム及び方法
【課題】 車両の車載装置が自律的に有する自車位置の異常を路側で判定できるようにする。
【解決手段】 本発明は、光無線通信と電波無線通信の双方に対応する車両5の車載装置2が自律的に有する自車位置の異常を、路側で判定するための位置判定システムに関する。このシステムでは、ビーコンヘッド8に対して車載装置2が送信したアップリンク光UOに基づいてビーコンヘッド8の通信領域Aに対する車両5の通過位置X0を路側で特定し、特定された車両5の通過位置X0を利用して、ビーコンヘッド8との光無線通信の後に車載装置2が送信する電波信号S5に含まれる車両5の自車位置X1が異常か否かを、路側で判定する。
【解決手段】 本発明は、光無線通信と電波無線通信の双方に対応する車両5の車載装置2が自律的に有する自車位置の異常を、路側で判定するための位置判定システムに関する。このシステムでは、ビーコンヘッド8に対して車載装置2が送信したアップリンク光UOに基づいてビーコンヘッド8の通信領域Aに対する車両5の通過位置X0を路側で特定し、特定された車両5の通過位置X0を利用して、ビーコンヘッド8との光無線通信の後に車載装置2が送信する電波信号S5に含まれる車両5の自車位置X1が異常か否かを、路側で判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光ビーコンと車両に搭載した車載装置との間の光無線通信を利用して、車載装置が自律的に有する自車位置が異常か否かを路側で判定するようにした位置判定システム及び方法に関するものである。
【背景技術】
【0002】
路車間通信システムを利用した交通情報サービスとして、光ビーコン、電波ビーコン又はFM多重放送を用いたいわゆるVICS(Vehicle Information and Communication System:(財)道路交通情報通信システムセンターの登録商標)が既に展開されている。このうち、光ビーコンは近赤外線を通信媒体とした光無線通信を採用しており、車載装置との双方向通信が可能となっている。
具体的には、車両の保持するビーコン間の旅行時間情報等を含むアップリンク情報が車載機からインフラ側の光ビーコンに送信され、逆に、渋滞情報、区間旅行時間情報、事象規制情報及び車線通知情報等を含むダウンリンク情報が光ビーコンから車載装置に送信されるようになっている(例えば、特許文献1参照)。
【0003】
上記光ビーコンは、光無線通信のための通信領域が道路の所定範囲に設定された投受光器(ビーコンヘッド)を備えており、このビーコンヘッドは、ダウンリンク光を送出する発光ダイオード(LED)と、車載装置からのアップリンク光を受光するフォトダイオード(PD)とを備えている。
他方、上記車載装置も、ビーコンヘッドとの間で双方向の光無線通信を行うために、発光ダイオードとフォトダイオードとを有する投受光器(車載ヘッド)を備えている。
【0004】
本出願人は、上記光ビーコンを用いた路車間通信システムを用いて、道路上に設定されたアップリンク領域の基準位置(例えば、車両進行方向の上流端)を、通信領域を通過する車両の走行位置(通過位置)とみなし、その基準位置を起点とした距離情報をダウンリンク切り替え後のダウンリンク情報に含ませることで、車両側で正確な距離情報を把握させる技術を既に提案している(例えば、特許文献2及び3参照)。
この場合、例えば、上記基準位置から下流側の所定位置(例えば、信号機の手前に設けられた停止線)までの距離情報をダウンリンク情報に含ませれば、この距離情報を受けた車載装置により、停止線の手前で車両を強制的に制動させたり、ドライバに停止や減速を促す報知を行ったりして安全運転支援を行うことができる。
【0005】
そして、光ビーコンのインタフェース規格によれば、アップリンク領域の車両進行方向の全長は1.6mと規定されている。従って、仮にこの規格通りにビーコンヘッドの通信領域が設定されておれば、アップリンク光の受光時刻と基準位置の通過時刻とをほぼ同じと見なすことで通信領域に対する車両の通過位置を特定することができ、この場合、ビーコン側で測定可能な通過位置の誤差は最大でも1.6m程度であるということになる。
【0006】
一方、VICS対応の車載装置では、光ビーコンとの光無線通信だけでなく、電波無線通信にも対応していることが多い。
この場合、車車間通信を通じて自車位置の情報を他車両とやり取りすることにより、交差点での出合い頭衝突や右左折時衝突の防止に役立てる協調システムを構成したり(特許文献4参照)、路側の電波無線通信装置への車路間通信によって自車位置を交通情報センターに通知することにより、同センターが把握する交通情報の精度向上に役立てたりすることができる。
【0007】
【特許文献1】特開2005−268925号公報
【特許文献2】特開2007−293660号公報
【特許文献3】特開2007−317166号公報
【特許文献4】特開2002−183889号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、VICS対応の車載装置では、通常、GPS(Global Positioning System)受信機で受信した測位データによって自車位置を自律的に捕捉している。しかし、このGPSによる測位データには、環境に応じて10m程度の誤差を含むことがあり、この誤差は、光ビーコンへのアップリンク光で得られる前記通過位置の誤差よりも信頼性が低い。
従って、GPSによる測位データをそのまま自車位置として採用し、車車間通信や車路間通信の際に外部に送信すると、他の車両やインフラ側との協調システムが不調になる恐れがある。
【0009】
そこで、アップリンク光の受光で特定できるより正確な前記通過位置をダウンリンク情報に含めて車載装置に通知し、この通過位置に基づいてGPSによる自車位置を車載装置において補正することが推奨される。
しかしながら、このような補正機能を車載装置に設けても、ビーコンヘッドからのダウンリンク光の受光に失敗した場合には、比較的誤差の大きいGPSによる測位データがそのまま踏襲されることになるし、また、車載装置での自車位置の管理機能に不具合がある場合には、上記補正の如何に拘わらず正確な自車位置が得られない。
【0010】
本発明は、このような実情に鑑み、車両の車載装置が自律的に有する自車位置の異常を路側で判定できるようにして、自車位置が異常な車両の存在を、当該車両やその他の車両に警告することができる位置判定システム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の位置判定システム(請求項1)は、光無線通信と電波無線通信の双方に対応する車両の車載装置が自律的に有する自車位置の異常を、路側で判定するための位置判定システムであって、前記車載装置との間で光無線通信を行うための通信領域が道路の所定範囲に設定されたビーコンヘッドと、前記車載装置との間で電波無線通信を行うための通信エリアを有しており、前記ビーコンヘッドとの光無線通信の後に前記車載装置が送信する、前記車両の自車位置に関する情報を含む電波信号よりなるアップリンク信号を受信可能な路側通信機と、前記ビーコンヘッドが受信するアップリンク光に基づいて前記通信領域に対する前記車両の通過位置を特定する位置特定部と、特定された前記通過位置と前記アップリンク信号に含まれる前記自車位置との差に基づいて、当該自車位置が異常か否かを判定する位置判定部と、を備えていることを特徴とする。
【0012】
本発明の位置判定システムによれば、上記位置特定部が、ビーコンヘッドが受信するアップリンク光に基づいて通信領域に対する車両の通過位置を特定し、上記位置判定部が、特定された通過位置とアップリンク信号に含まれる自車位置との差に基づいて、当該自車位置が異常か否かを判定するので、車両の車載装置が自律的に有する自車位置の異常を路側で判定することができる。
このため、ある車両の自車位置が異常であると判定された場合は、例えば、路側通信機を通じて各車両の車載装置にその判定結果を通知することにより、自車位置精度の悪い車両の存在を、当該車両やその他の車両に警告することができる。
【0013】
すなわち、本発明の位置判定システムにおいて、前記位置判定部が前記自車位置を異常と判定した場合に、この判定結果を含む電波信号よりなるダウンリンク信号を前記通信エリアに向けて前記路側通信機にブロードキャストで送信させる送信制御部を、更に備えていることが好ましい(請求項2)。
この場合、判定対象となった車両の車載装置が上記判定結果を含むダウンリンク信号を受信した場合には、例えば、車載ディスプレイ等によって当該判定結果を搭乗者に通知することにより、自車両の位置評定機能の不具合を搭乗者に警告することができる。
【0014】
また、判定対象となった車両以外の他車両の車載装置が上記判定結果を含むダウンリンク信号を受信した場合には、この判定結果に対応する車両からの電波信号を無視する運用に変更等することにより、誤った自車位置の情報に基づいて車車間の協調システムが継続するのを防止することができる。
【0015】
ところで、本発明の位置判定システムにおいて、前記位置判定部における判定処理は、アップリンク光によって特定される通過位置と、そのアップリンク光と同じ送信元のアップリンク信号に含まれる自車位置との差が所定範囲内か否かで行うことができる。
しかし、上記アップリンク光の受信時刻とアップリンク信号の受信時刻の間には時間的なずれがあるので、この時間的ずれを考慮せずに通過位置と自車位置との差を単純に比較しても、正確な異常判定処理を行うことができない。
【0016】
そこで、前記位置判定部は、前記通過位置と前記自車位置との差を、次の第1時刻から第2時刻までの間に前記車両が走行した走行距離と比較することにより、当該自車位置が異常か否かを判定することが好ましい(請求項3)。
(a) 前記アップリンク光を前記ビーコンヘッドが受信した第1時刻
(b) 前記アップリンク光と同じ送信元の前記車載装置からの前記アップリンク信号を前記路側通信機が受信した第2時刻
【0017】
また、本発明の位置判定システムにおいて、前記ビーコンヘッドが、前記通信領域に含まれるアップリンク領域において前記車載装置からのアップリンク光を受光する1つの受光素子を有する場合には、前記位置特定部は、前記アップリンク領域に設定された基準位置を前記車両の通過位置として特定することができる(請求項4)。
もっとも、実際に運用されている光ビーコンの通信領域、特にアップリンク領域は、車載装置からのアップリンク光をより確実に受光するために、インタフェース規格による正式寸法よりもかなり広範囲になっていることがある。
【0018】
このように通信領域が広範囲であると、通信領域内に設定した基準位置とアップリンク光の送信位置との乖離が大きくなってしまう可能性が高く、この場合には、アップリンク光に基づいて特定する実際の車両の通過位置の精度が低下する。
そこで、アップリンク領域が車両進行方向に広く設定されている場合であっても、車両の通過位置を路側で精度よく特定できるようにするため、前記ビーコンヘッドは、前記通信領域に含まれるアップリンク領域を車両進行方向に分割してなる各分割領域に対応する受光領域を有する複数の受光素子を有し、前記位置特定部は、複数の前記受光素子のうちで前記アップリンク光を受光した当該受光素子に対応する前記分割領域に設定された基準位置を前記車両の通過位置として特定することが好ましい(請求項5)。
【0019】
かかる分割領域に対応する複数の受光素子を搭載した光ビーコン(以下、「PD分割タイプ」の光ビーコンと称することがある。)は、本出願人が既に提案しているものである(特願2007−20910号の明細書参照)。
このPD分割タイプの光ビーコンを使用すれば、アップリンク光の受光機会を向上させるために、アップリンク領域を車両進行方向に長く設定する場合であっても、当該アップリンク領域を構成する個々の分割領域については、これを車両進行方向に狭く設定することが可能となる。
【0020】
また、PD分割タイプの光ビーコンでは、複数のフォトダイオードのうちでどれが実際にアップリンク光を受光したかを判定することにより、走行中の車両(車載装置)がいずれの分割領域でアップリンク光を発光したかを路側で特定することができる。
従って、この場合、アップリンク光を発光した車両(車載装置)の走行位置を、各分割領域の車両進行方向長さ以下の精度で求めることが可能となり、通過位置の評定精度を向上することができる。
【0021】
本発明の位置判定方法(請求項6)は、本発明の位置判定システム(請求項1)が行う判定方法であって、当該判定システムと同様の作用効果を奏する。
なお、本発明の位置判定方法においても、自車位置が異常であると判定された場合には、その判定結果を含む電波信号よりなるダウンリンク信号を通信エリアに向けて路側通信機にブロードキャストで送信することにより、自車両の位置評定機能の不具合を搭乗者に警告でき、また、誤った自車位置情報に基づいて他車両との間で車車間の協調システムが継続するのを防止できる。
【発明の効果】
【0022】
以上の通り、本発明によれば、車両の車載装置が自律的に有する自車位置の異常を路側で判定できるので、この判定結果を各車両の車載装置に無線送信することにより、自車位置が異常な車両の存在を当該車両やその他の車両に警告することができる。
【発明を実施するための最良の形態】
【0023】
以下、添付図面を参照しつつ、本発明の実施形態を詳細に説明する。
〔第1実施形態〕
〔システムの全体構成〕
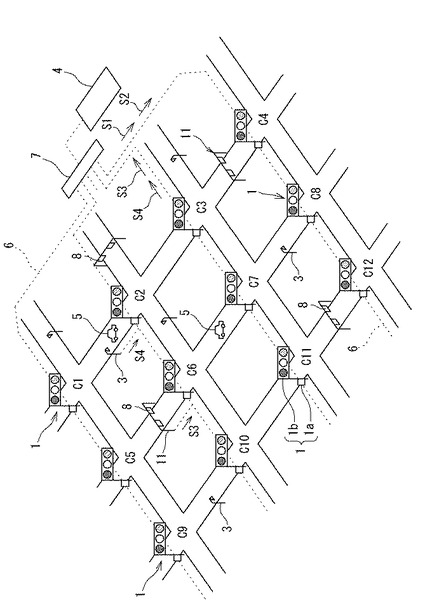
図1は、本発明の位置判定システムの一例として例示する、交通信号制御システムの全体構成を示している。
図1に示すように、本実施形態の交通信号制御システムは、交通信号機1、車載装置2(図2参照)、車両感知器3、中央装置4、光ビーコン11のビーコンヘッド8、及び、車載装置2を搭載した車両5などを含む。
【0024】
各交通信号機1は、複数の交差点Ci(i=1〜12)のそれぞれに設置され、電話回線等の通信回線6を介してルータ7に接続されている。このルータ7は交通管制センター内の中央装置4に接続され、中央装置4は、所定エリア内の交差点Ciの各交通信号機1とLAN(Local Area Network)を構成している。
従って、中央装置4は、各交通信号機1と双方向通信が可能であり、各交通信号機1は他の交通信号機1とも双方向通信が可能である。なお、中央装置4は、交通管制センターではなく道路上に設置してもよい。
【0025】
車両感知器3は、各交差点Ciに流入する車両台数をカウントするために、対応する各交差点Ciの上流側に設置されており、専用の通信回線を介して対応する各交通信号機1と繋がっている。また、光ビーコン11は、光無線通信によって車載装置2と所定の情報交換を行うために道路の各所に設置されており、この光ビーコン11のビーコンヘッド8も専用の通信回線を介して各交通信号機1と繋がっている。
なお、図1では、図示を簡略化するために、各交差点Ciに信号灯器1bが1つだけ描写されているが、実際の各交差点Ciには、例えば図2に示すように、互いに交差する道路の上り下り用として4つの信号灯器1bが設置されている。
【0026】
〔中央装置〕
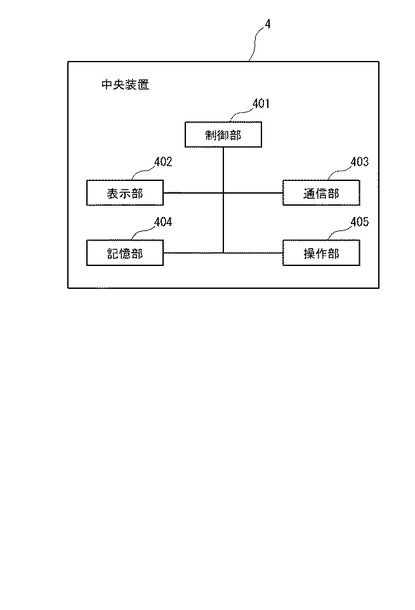
図3は、中央装置4の構成を示すブロック図である。
図3に示すように、中央装置4は、制御部401、表示部402、通信部403、記憶部404及び操作部405を含んでいる。
中央装置4の制御部401は、ワークステーション(WS)やパーソナルコンピュータ(PC)等よりなり、内部バスを介して上記ハードウェア各部と繋がっており、これら各部の動作を制御する。
【0027】
また、中央装置4の制御部401は、交通信号機1に繋がれた車両感知器3やビーコンヘッド8等からの各種の交通データを収集・処理(演算)・記録し、そのデータに基づいて信号制御や交通情報の提供等を統括的に行う。
例えば、制御部401は、自身のネットワークに属する交差点Ciの交通信号機1に対して、同一道路上の交通信号機1群を調整する系統制御や、この系統制御を道路網に拡張した広域制御(面制御)を行うものである。
【0028】
中央装置4の表示部402は、自身が管理するエリアの道路地図と、この道路地図上のすべての交通信号機1、車両感知器3及びビーコンヘッド8等の位置が表示された表示画面により構成され、中央オペレータに渋滞や事故等の交通状況を報知するものである。
中央装置4の通信部403は、通信回線6を介してLAN側と接続された通信インタフェースであり、所定時間ごとに信号灯器1bの灯色切り替えタイミング等に関する信号制御指令S1と、渋滞情報等よりなる交通情報S2とを各交通信号機1に送信している(図1及び図2参照)。
【0029】
信号制御指令S1は、信号制御パラメータの演算周期(例えば、1.0〜2.5分)ごとに送信され、交通情報S2は例えば5分ごとに送信される。
また、中央装置4の通信部403は、各交通信号機1から、ビーコンヘッド8から得られた車両5の旅行時間等に関するビーコン情報S3と、車両感知器3の感知信号S4とをほぼリアルタイム(例えば、0.1〜1.0秒周期)で受信している(図1及び図2参照)。
【0030】
中央装置4の記憶部404は、ハードディスクや半導体メモリ等から構成されており、前記系統制御や広域制御を行うための交通制御プログラムと、この制御に用いる交通指標の演算プログラム等を記憶している。また、記憶部404は、制御部401が生成した前記信号制御指令S1及び交通情報S2や、LAN側から取得したビーコン情報S3及び感知信号S4等を一時的に記憶する。
中央装置4の操作部405は、キーボードやマウス等の入力インタフェースよりなり、この操作部405によって中央オペレータが上記表示部402に対する表示切り替え操作等を行えるようになっている。
【0031】
〔交通信号機〕
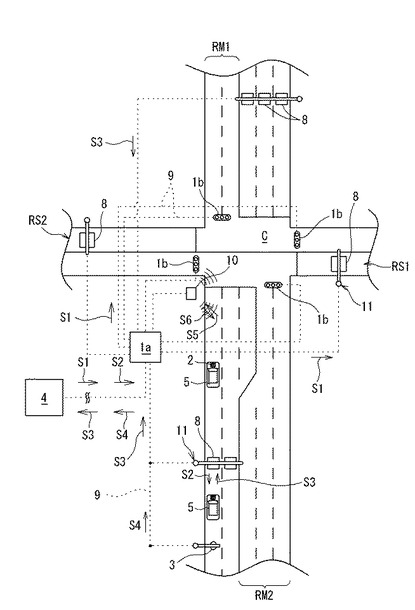
図2は、交通信号機1の概要を示す道路平面図である。
図2では、比較的交通量の多い主道路RM1,RM2と、比較的交通量の少ない従道路RS1,RS2とが合流した交差点Cを例示している。
この交通信号機1は、主道路RM1,RM2及び従道路RS1,RS2のそれぞれに設置された4つの信号灯器1bと、この信号灯器1bと通信回線9を介して接続された交通信号制御機1aとを備えている。
【0032】
図2に示すように、本実施形態の交通信号制御機1aには、各信号灯器1bの他に、車両感知器3、ビーコンヘッド8、及び、車載装置2と電波無線通信が可能な路側通信機10が通信回線9を介して接続されている。
交通信号制御機1aは、中央装置4から信号制御指令S1を受信し、当該信号制御指令S1に基づいて、各信号灯器1bの青、黄、赤及び右折矢等の各信号灯の点灯、消灯及び点滅を制御する。
【0033】
また、交通信号制御機1aは、中央装置4から受信した交通情報S2や自身が記憶している交差点ID等をビーコンヘッド8が送出するダウンリンク情報に含め、光無線通信によって車載装置2に送信することができる。
更に、交通信号制御機1aは、ビーコンヘッド8が車載装置2から受信したビーコン情報(アップリンク情報)S3を当該ビーコンヘッド8から取得し、車両感知器5から感知信号S4を取得することができる。
【0034】
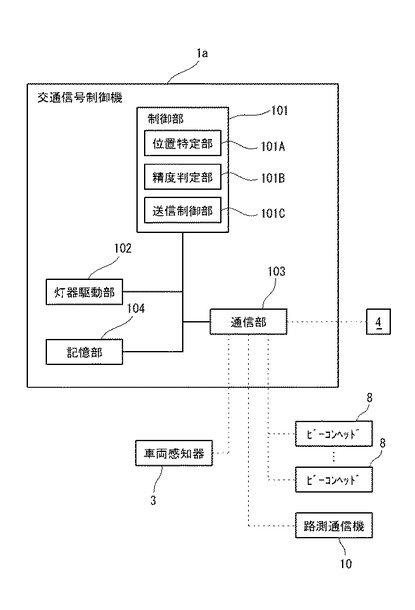
図4は、上記交通信号制御機1aの構成を示すブロック図である。
図4に示すように、交通信号制御機1aは、制御部101、灯器駆動部102、通信部103及び記憶部104を含んでいる。
交通信号制御機1aの制御部101は、1つ又は複数のマイクロコンピュータから構成されている。制御部101には、内部バスを介して灯器駆動部102、通信部103及び記憶部104が接続されており、制御部101はこれらのハードウェア各部の動作を制御する。
【0035】
この交通信号制御機1aの制御部101は、中央装置4が前記系統制御や広域制御を行った結果の出力である信号制御指令S1に従って各信号灯器1bを駆動し、その指令S1に基づく所定のタイミングで各信号灯器1bの信号灯色を切り替える。
灯器駆動部102は、半導体リレー(図示せず)を備え、上記制御部101から入力された信号出力指令S1に基づいて、複数の信号灯器1bの青色灯、黄色灯、赤色灯それぞれに対応して各色の信号灯に供給される交流電圧(AC100V)又は直流電圧をオン/オフする。
【0036】
交通信号制御機1aの通信部103は、中央装置4、車両感知器3、ビーコンヘッド8及び路側通信機10に接続されており、これらとの間で双方向の有線通信を行う通信インタフェースである。
また、路側通信機10は、交差点Cに流入する車両5の車載装置2との間で双方向の電波無線通信を行う送受信機よりなり、車載装置2が送信した電波信号よりなるアップリンク信号S5を受信し、車載装置2に対して電波信号よりなるダウンリンク信号S6を送信することができる(図2参照)。
【0037】
上記アップリンク信号S5には、少なくとも、車載装置2を搭載する車両5に対応する車両IDと、当該車両5がそれぞれ自律的に有している、例えば、緯度、経度及び高度からなる自車位置に関する情報が含まれている。また、後述する位置判定部101Bが自車位置X1を異常と判定した場合には、少なくとも当該判定結果に関する情報が上記ダウンリンク信号S6に含められる。
なお、ビーコンヘッド8での光無線通信の場合と同様に、車載装置2が有する旅行時間情報をアップリンク信号S5で路側通信機10に送信してもよいし、渋滞情報や事象規制情報等をダウンリンク信号S6で各車載装置2に送信してもよい。
【0038】
本実施形態の路側通信機10は、例えば、無線LANやWiMAX(World Interoperability for Microwave Access)等の中・広域通信装置よりなり、車両5に搭載された車載装置2との間で各種情報を電波信号S5,S6で双方向通信することができる。
また、路側通信機10は、交差点C(図2参照)に流入する各道路RM1,RM2,RS1,RS2上を走行する車両5の車載装置2と通信可能である。路側通信機10の通信エリアは、各道路RM1,RM2,RS1,RS2に設置されたビーコンヘッド9の通信領域A(図7参照)を内部に包含できる広さを有し、例えば道路延長方向で50〜200m程度に設定される。
【0039】
もっとも、路側通信機10の通信エリアは、必ずしもビーコンヘッド8の通信領域Aをすべて包含している必要はなく、この通信領域Aと一部重複する程度か、或いは、少なくともその通信領域Aの下流側近傍に近接する程度の広さであればよい。
交通信号制御機1aの記憶部104は、ハードディスクや半導体メモリ等から構成されており、一時記憶データとして、前記信号制御指令S1、交通情報S2、ビーコン情報S3、感知信号S5、アップリンク信号S5及びダウンリンク信号S6等を記憶する。
【0040】
また、交通信号制御機1aの記憶部104には、ビーコンヘッド8と車載装置2の間の光無線通信や、車載装置2と路側通信機10の間の電波無線通信を実行するための、通信制御用のコンピュータプログラムが格納されており、制御部101はこれらのコンピュータプログラムを記憶部104から読み出して、ビーコンヘッド8や路側通信機10に対する通信制御を実行する。
上記コンピュータプログラムは、車両5の車載装置2が自律的に有する自車位置の異常を判定するための判定処理を実行可能であり、その機能定義として、位置特定部101Aと、位置判定部101Bと、送信制御部101Cとを含んでいる(図4参照)。なお、これら各部による処理内容は後述する。
【0041】
〔車載装置〕
各車両5に搭載された車載装置2は、VICS対応であり、ビーコンヘッド8との間の光無線通信による双方向通信機能と、路側通信機10との間の電波無線通信による双方向通信機能と、搭乗者が設定した目的地点に案内するナビゲーション機能とを有する。
図5は、車載装置2(VICS対応)の構成を示すブロック図である。
図5に示すように、この車載装置2は、GPS処理部201、方位センサ202、車速取得部203、車載通信部204、記憶部205、操作部206、表示部207、音声出力部208、処理部209及び車載ヘッド210等を含んでいる。
【0042】
GPS処理部201は、GPS衛星からのGPS信号を受信し、GPS信号に含まれる時刻情報、GPS衛星の軌道、測位補正情報等に基づいて、車両5の自車位置(緯度、経度及び高度)を計測する。
方位センサ202は、光ファイバジャイロなどで構成されており、車両5の方位及び角速度を計測する。車速取得部203は、車速センサ(図示せず)が車輪の角速度を検出することにより計測した車両5の速度データを取得する。
【0043】
車載通信部204は、電波信号を通信媒体とした無線通信機であり、他車両5の車載装置2との間で例えばCSMA(Carrier Sense Multiple Access)方式による車車間通信を行うことができる。
また、車載通信部204は、路側通信部10の通信エリアにおいては、路側通信部10との無線通信を優先し、路側通信機10が設定したタイムスロットに従って時分割多重(TDMA:Time Division Multiple Access)方式による車路間及び路車間通信を行う。
【0044】
車載装置2の記憶部205は、ハードディスクや半導体メモリ等から構成されており、一時記憶データとして、車載通信部204や車載ヘッド210が受信した各種データを記憶している。
また、車載装置2の記憶部205は、路側の光ビーコン11や路側無線機10との間の通信制御のためのコンピュータプログラムと、目的地点への最適経路探索(カーナビゲーション)を実行するコンピュータプログラムと、その最適経路探索に必要な道路地図データ等を記憶している。
【0045】
道路地図データには、交差点データとリンクデータとが含まれている。
上記交差点データは、交差点IDと交差点の位置とを対応付けたデータである。また、上記リンクデータは、特定リンクのリンクIDに対して、特定リンクの始点・終点・補間点の位置、特定リンクの始点に接続する上流リンクのリンクID、特定リンクの終点に接続する下流リンクのリンクID、及び、特定リンクのリンクコストを対応付けたデータよりなる。
【0046】
リンクコストは、例えば、特定リンクとその終点に接続する下流リンクの組み合わせの数だけ用意されており、特定リンクの始点に進入してから当該特定リンクの終点を退出し、下流リンクの始点に進入するまでに要する時間が設定されている。
すなわち、リンクコストには、特定リンクの始点から終点までを走行するのに要するコスト(時間)と、リンクの終点から次の下流リンクの始点までを走行するのに要するコスト(時間)、つまり、交差点を通過するのに要するコストが含まれている。
【0047】
車載装置2の操作部206は、タッチパネルやボタン等から構成されており、ドライバを含む車両5の搭乗者が目的地の設定等を行えるようになっている。
車載装置2の表示部207は、車両5のダッシュボード部分に取り付けられたモニタ装置(図示せず)よりなり、処理部209が後述する感応要求処理において作成した画像データを搭乗者に表示する。また、音声出力部208は、処理部209が作成した音声データをスピーカー(図示せず)から出力する。
【0048】
車載装置2の処理部209は、1又は複数のマイクロコンピュータ等から構成されており、GPS処理部201、方位センサ202、車速取得部203、車載通信部204、記憶部205、操作部206、表示部207、音声出力部208の各処理を制御する。
また、車載装置2の処理部209は、目的地点への最適経路探索の処理結果である最適ルートを表示部207の画面上に表示し、このルート表示に重ねて車両5の自車位置を画面上に表示する。
【0049】
なお、上記最適ルートと車両5の自車位置とのマッチング処理は、GPS処理部201が計測した車両5の自車位置と、方位センサ202が計測した車両5の方位及び角速度と、車速取得部203が取得した車両5の速度とを含む各種データと、記憶部205が記憶する道路地図データとに基づいて行われる。
更に、車載装置2の処理部209は、車載通信部204において他の車両5から受信した受信信号に含まれる自車位置に基づいて、交差点Ci(図1参照)における出合い頭衝突の防止等の車車間協調処理を実行可能である。
【0050】
車載装置2の車載ヘッド210は、後述する光ビーコン11の通信領域A内において、ビーコンヘッド8との間で近赤外線光よりなる光信号の送受信を行うための投受光器であり、ビーコンヘッド8に上げるアップリンク光を送出する発光ダイオード(図示せず)等よりなる発光素子と、ビーコンヘッド8からのダウンリンク光を受光するフォトダイオード(図示せず)等からなる受光素子を内部に備えている。
この車載ヘッド210は、例えば、車両5のフロントガラスの手前のダッシュボード上に設置されている。
【0051】
〔光ビーコンの構成〕
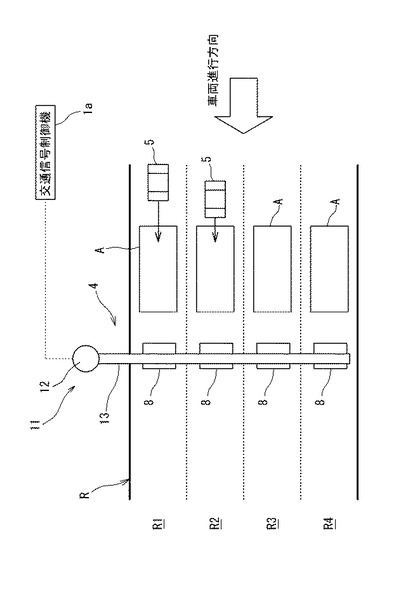
図6は、前記ビーコンヘッド8を有する光ビーコン11の平面図である。
図6に示すように、本実施形態の光ビーコン11は、同じ方向の複数(図6の例では4つ)の車線R1〜R4を有する道路Rの脇に立設された支柱12と、この支柱12から道路R側に水平に架設した架設バー13と、この架設バー13における各車線R1〜R4に対応する位置に固定された複数のビーコンヘッド(投受光器)8とを備えている。
【0052】
各ビーコンヘッド8はそれぞれ交通信号制御機1aに接続されており、当該制御機1aによって一括制御される。
各ビーコンヘッド8の内部には、発光ダイオード14とフォトダイオード15(図7参照)が搭載されている。発光ダイオード14は、各車線R1〜R4の直下よりも上流側に向けて近赤外線を発光しており、これにより、車載装置2との間の光無線通信を行うための通信領域Aが当該ビーコンヘッド8の上流側(図6の右側)に設定されている。
【0053】
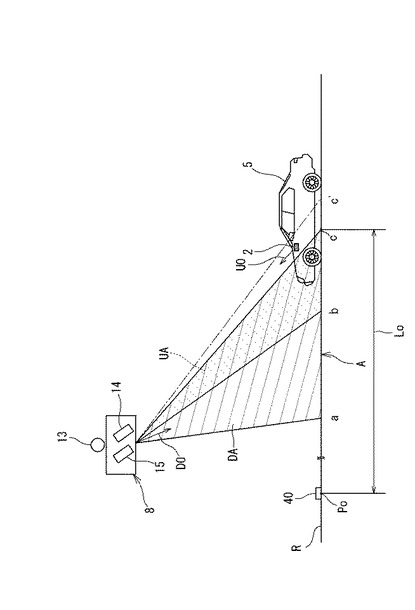
図7は、光ビーコン11の通信領域Aを示す側面図である。
図7に示すように、この通信領域Aは、車載ヘッド210のフォトダイオードがダウンリンク光を受光可能なダウンリンク領域(図7において実線のハッチングを設けた領域)DAと、ビーコンヘッド8のフォトダイオード15がアップリンク光UOを受光可能なアップリンク領域(図7において破線のハッチングを設けた領域)UAとから構成されている。
【0054】
光ビーコン(光学式車両感知器)4の「近赤外線式インタフェース規格」によれば、アップリンク領域UAは、ダウンリンク領域DAの車両進行方向の上流部分(図7の右側部分)と重複しており、ダウンリンク領域DAとアップリンク領域UAの上流端cは互いに一致している。
従って、ダウンリンク領域DAの車両進行方向長さは、通信領域A全体の同方向長さと一致する。
【0055】
また、上記規格では、一般道向けの光ビーコン4の場合で、ダウンリンク領域DAの下流端aは、投受光器8の直下の1.0〜1.3m上流側に位置し、ダウンリンク領域DAの下流端aからアップリンク領域UAの下流端bまでの距離は2.1mと規定され、アップリンク領域UAの下流端bから同領域UAの上流端cまでの距離は1.6mと規定されている。この場合、通信領域Aの車両進行方向の全長は3.7mとなる。
もっとも、各領域DA,UAの車両進行方向長さは上記各数値に限定されない。また、図7に仮想線で示すように、ダウンリンク領域DAの上流端c’をアップリンク領域の上流端cよりも更に上流側(図7の右側)に位置させる場合もある。
【0056】
〔双方向光無線通信の内容〕
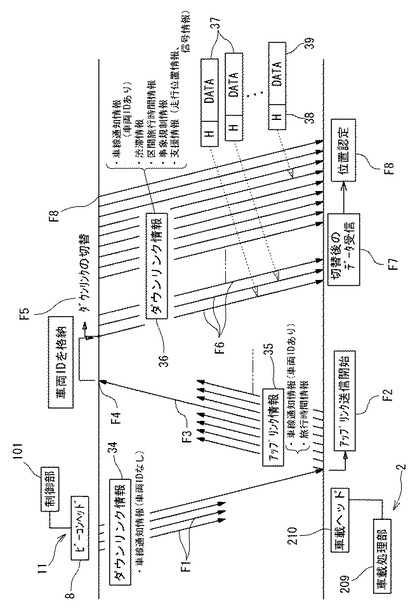
図8は、ビーコンヘッド8と車載ヘッド210との間で行われる、双方向光無線通信のシーケンス図である。以下、図8を参照して、この双方向光無線通信の内容を説明する。
まず、交通信号制御機1aの制御部101は、各車線R1〜R4に対応するビーコンヘッド8から、ダウンリンクの切り替え前の第1情報として、車線通知情報を含む第1のダウンリンク情報34を、各車線R1〜R4のダウンリンク領域DAに所定の送信周期で常に送信し続けている(図8のF1)。なお、この段階では、車線通知情報には未だ車両IDは格納されていない。
【0057】
車両5が実際のダウンリンク領域DAに進入すると、車載装置2の車載ヘッド210が車線通知情報(車両ID無し)を含む第1のダウンリンク情報34を受信する。
このさい、車載装置2の処理部209は、当該車両5が実際の通信領域A内に存在していることを認識する。その後、処理部209は、アップリンク情報35の送信を開始し(図8のF2)、このアップリンク情報35をビーコンヘッド8に対して所定の送信周期(アップリンク送信周期)で送信する(図8のF3)。
【0058】
車載装置2の処理部209は、車両5に特定の車両IDを上記アップリンク情報35に格納して当該アップリンク情報35を送信し、ビーコン間の旅行時間情報を有している場合には、この情報もアップリンク情報35に含ませる。
また、車載装置2の処理部209は、光ビーコン11側の制御機でもある交通信号制御機1aの制御部101が、ダウンリンクの切り替えを行ったことを認識するまで、当該アップリンク情報35を送信し続ける。
【0059】
一方、光ビーコン11のビーコンヘッド8がアップリンク情報35受信すると(図8のF4)、制御部101は、ダウンリンクの切り替えを行い、第2情報として、車両ID情報を有する車線通知情報を含む、第2のダウンリンク情報36の送信を開始し(図8のF5)、この第2のダウンリンク情報36の送信を所定時間内において可能な限り繰り返す(図8のF6)。
【0060】
上記車線通知情報には、車線R1〜R4(図2)ごとに車両IDを格納するフィールドがあり、各車両IDに対して車線番号を付与することができる。このため、異なる車線R1〜R4を走行する各車両5の車載装置2の処理部209は、その格納フィールド内のいずれに自車両の車両IDが含まれるかを判断することにより、自車両がどの車線R1〜R4を走行しているかを認識できる。
第2のダウンリンク情報36には、車両IDを含む車線通知情報の他に、渋滞情報、区間旅行時間情報、事象規制情報、及び、ドライバに対する安全運転支援のための支援情報等が含まれており、この支援情報には、信号情報と走行位置情報とが含まれている。
【0061】
このうち、信号情報は、光ビーコン11より下流側の信号灯器1bの灯色(青、赤、黄又は青矢印等)が変わるタイミング情報である。
走行位置情報は、ビーコン通過時における車両5の実際の走行位置(通信領域Aに対する通過位置)に関する情報である。本実施形態では、アップリンク領域UAの上流端c(図7参照)が基準位置に設定され、この基準位置cをビーコン通過時における車両5の通過位置と見なしている。また、走行位置情報には、上記基準位置cからその下流側の所定位置P0(例えば、停止線40)までの距離L0も含まれている。
【0062】
図8の右側に示すように、第2のダウンリンク情報36は、単一又は複数の最小フレーム37で構成されている。前記「近赤外線式インタフェース規格」によれば、この最小フレーム37のデータ量は合計128バイトと規定され、ヘッダ部38に5バイト、実データ部39に123バイトが割り当てられている。
前記規格によれば、第2のダウンリンク情報36は、1〜80個の最小フレーム37で構成することができ、送信可能時間は250msに設定されている。また、このダウンリンク情報36は送信すべき情報量に対応した任意数の最小フレーム37で構成され、上記送信可能時間の範囲内で繰り返し送信される。
【0063】
最小フレーム37の送信周期は約1msである。従って、例えば、3つの最小フレーム37で一つのダウンリンク情報36を構成する場合には、ダウンリンク情報36の送信周期は約3msになるので、当該ダウンリンク情報36は所定の送信可能時間(250ms)の間に約80回繰り返して送信されることになる。
車載装置2の処理部209は、第2のダウンリンク情報36を受信した時点(図8のF7)で光ビーコン11でのダウンリンクの切り替えを認識し、この時点でアップリンク情報35の送信を停止する。
【0064】
車載装置2の処理部209は、第2のダウンリンク情報36を受信すると、この情報36から信号情報と走行位置情報を抽出して位置標定を行い(図8のF8)、これらの情報に基づいてドライバに対する安全運転支援を行う。
例えば、車載装置2の処理部209は、信号情報に基づいて、下流側の信号灯器1bが近々赤信号になることを察知すると、表示部207や音声出力部208によってその旨をドライバに通知したり、走行位置情報に含まれる距離L0と現時点の車両5の走行速度とから、停止線40の手前で停止するための減速度を算出し、その減速度で車両5を制動して停止線40の手前で強制停止させたりして、安全運転支援を実行することができる。
【0065】
また、本実施形態では、車載装置2の処理部209は、ダウンリンク情報36に含まれる走行位置情報の中の通過位置(基準位置c)に基づいて、GPS処理部201によって常時捕捉している測位データを補正する自車位置の補正機能を有する。
【0066】
〔自車位置の異常判定処理〕
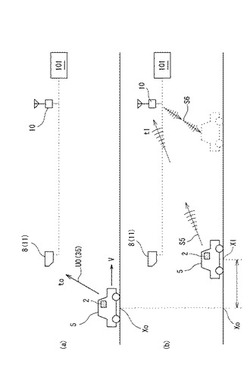
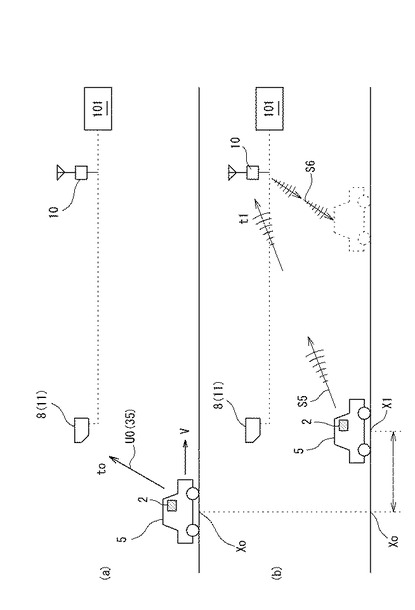
図9は、交通信号制御機1aの制御部101が行う自車位置の異常判定処理の内容を示すための、光ビーコン11及び路側無線機10の側面図である。以下、図9を参照して、本実施形態の異常判定処理について説明する。
図9(a)に示すように、まず、交通信号制御機1aの制御部101は、前記光無線通信のやり取りに用いられるビーコンヘッド8が受信したアップリンク光UOに基づいて、ビーコンヘッド8の通信領域Aに対する車両5の通過位置X0を特定する。
【0067】
すなわち、前記した通り、アップリンク領域UAの上流端cがビーコン通過時における車両5の実際の通過位置X0と見なされ、ビーコンヘッド8が車載装置2からアップリンク光UOを受光した受光時刻t0に、車両5が通過位置X0にあるものと推定される。
その後、例えば図9(b)に示すように、受光時刻t0以降の所定時間内(例えば、2秒以内)に、上記通過位置X0が特定された車両5からのアップリンク信号S5を路側受信機10が受信すると、交通信号制御機1aの制御部101は、そのアップリンク信号S5に含まれる自車位置X1に関する情報を抽出する。
なお、アップリンク光UOとアップリンク信号S5との対応付けは、両者に含まれる車両IDに基づいて行われる。
【0068】
そして、交通信号制御機1aの制御部101は、より正確な位置情報である通過位置X0を利用して、車両5の車載装置2が自律的に有していた自車位置X1の異常の有無を判定する。
具体的には、制御部101は、通過位置X0と自車位置X1との差を、アップリンク光UOの受信時刻(第1時刻)t0からアップリンク信号S5の受信時刻(第2時刻)t1までの間に車両5が走行した走行距離と比較することにより、自車位置X1が異常か否かを判定する。
すなわち、制御部101は、(X1−X0)の絶対値と、V×(t1−t0)(ただし、V:車両の走行速度)とを比較し、例えば、その絶対値がV×(t1−t0)よりも大きい場合には、車両5の自車位置X1が異常であると判定し、それ以下の場合には車両5の自車位置X1は正常であると判定する。
【0069】
なお、車両5の走行速度Vは、予め記憶部104に記録された設定値が使用される。或いは、車両感知器3から得られる通過車両の台数等を基に、道路Rの渋滞状況を判断することで走行速度Vを可変に設定することもできる。また、後述の第2実施形態に述べる方法等によって車両5の走行速度Vを路側で実測するようにしてもよい。更に、車両5が自律的に有する自車速度をアップリンク光UOやアップリンク信号S6に含め、車両5の走行速度Vを路側に通知することにしてもよい。
次に、交通信号制御機1aの制御部101は、自車位置X1が異常であるという判定結果となった場合には、この判定結果の情報と判定対象となった車両5の車両IDをダウンリンク信号S6に含め、このダウンリンク信号S6を、路側通信機10を通じてその通信エリアにブロードキャストで送信させる。
【0070】
このように、本実施形態の通信システムによれば、路側のインフラ装置である交通信号制御機1aの制御部101が、ビーコンヘッド8に対して車載装置2が送信したアップリンク光UOに基づいて車両5の通過位置X0を特定し、このように特定された車両5の通過位置X0とアップリンク信号S5に含まれる車両5の自車位置X1との差に基づいて、当該自車位置X1の良否を判定するので、車両5の車載装置2が自律的に有する自車位置X1の異常を路側で判定することができる。
【0071】
そして、本実施形態の通信システムによれば、上記制御部101が、車両5の自車位置X1が異常である場合に、この判定結果とこれに対応する車両IDを含むダウンリンク信号S6を、路側通信機10の通信エリアにブロードキャストで送信するので、判定対象となった車両5には、自車両の位置評定機能の不具合を通知することができ、他の車両5に対しては、自車位置X1が不正確である車両5の存在とその車両IDを通知することができる。
【0072】
このため、判定対象となった車両5の場合には、例えば、表示部207や音声出力部208で判定結果を出力することにより、車載装置2の位置評定機能の故障等を搭乗者に警告することができる。
また、他の車両5の場合には、例えば、判定結果が不良の車両5からの電波信号S6についてはこれを無視するという運用を採用することにより、誤った自車位置X1の情報に基づいて車車間の協調システムが継続するのを防止することができる。
【0073】
〔第2実施形態〕
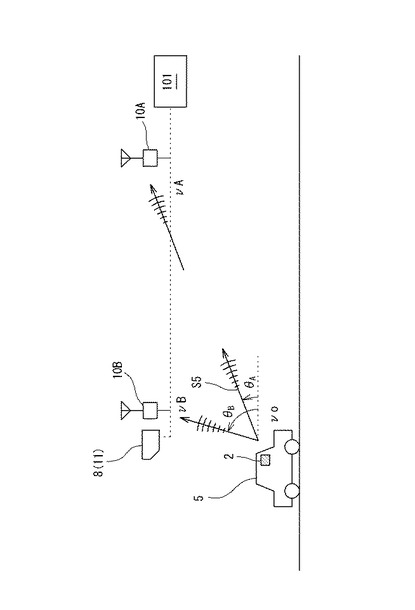
図10は、第2実施形態の位置判定システムに用いる光ビーコン11と路側通信機10A,10Bの側面図である。
この第2実施形態と前記第1実施形態の相違は、2台の路側無線機10A,10Bで受信した信号周波数の間に生じるドップラーシフトを利用して、車両5の走行速度Vを路側で実測できるようにした点にある。
【0074】
すなわち、本実施形態では、車両進行方向に離れた位置に2台の路側無線機10A,10Bが設置されており、ビーコンヘッド8の下流側の遠方位置に第1の路側無線機10Aが設置され、ビーコンヘッド8の下流側の近接位置に第2の路側無線機10Bが設置されている。
ここで、車両5の車載装置2が送信するアップリンク信号S5の原周波数をν0 とし、第1の路側無線機10Aが受信する周波数をνA 、第2の路側無線機10Bが受信する周波数をνB 、光速をcとすると、νA 及びνB は、それぞれ次の式(1)で算出することができる。
【0075】
【数1】

【0076】
従って、νA とνB との差をとると、次の式(2)のようになる。
【数2】
【0077】
なお、上記各式(1)及び(2)において、θA とθB は、図10に示すように、ビーコンヘッド8の通信領域Aを通過する車両5から見た、各路側無線機10A,10Bに対する仰角であり、この値は、各路側無線機10A,10Bの設置場所が決まれば予め設定値として決めておくことができる。
従って、各路側無線機10A,10Bで計測した周波数νA 及びνB を式(2)に代入すれば、走行速度Vを路側において実測することができる。
【0078】
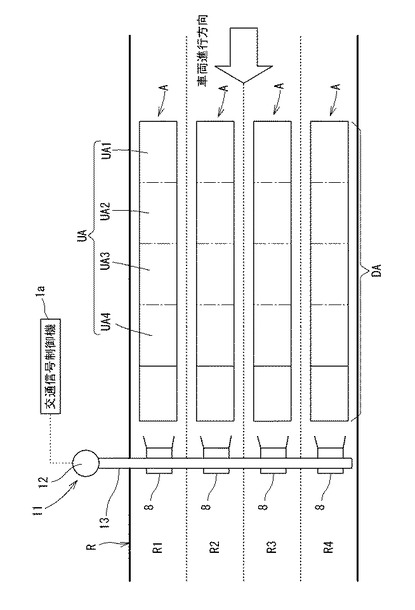
〔第3実施形態〕
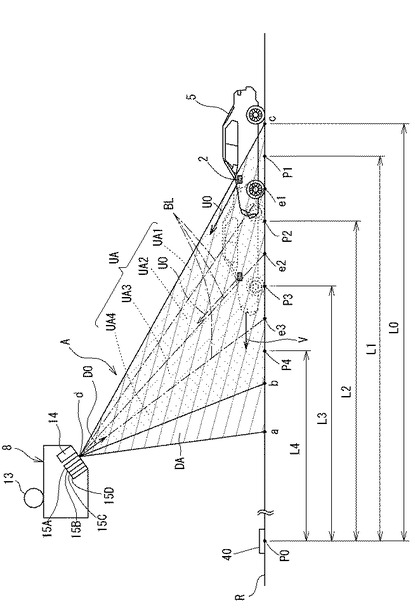
図11は、第3実施形態の位置判定システムに用いる光ビーコン11の平面図であり、図12は、その光ビーコン11の通信領域Aを示す側面図である。
図11及び図12に示すように、本実施形態では、光ビーコン11がいわゆる「PD分割タイプ」のものであり、アップリンク領域UAの下流端bから同領域UAの上流端cまでの距離全体は、上記規定よりも上流側及び下流側へ長く設定されている。その結果、アップリンク領域UAは上記規定よりも車両進行方向に広がり、同時にダウンリンク領域DAも上記規定よりも車両進行方向に広がっている。
【0079】
このようにアップリンク領域UA及びダウンリンク領域DAが広くなると、車載装置2と光ビーコン4との間のアップリンク情報35及びダウンリンク情報34,36の送受信の確実性が増すが、その一方で、走行位置情報(通過位置X0や距離L0)の精度が低下する。
そこで、本実施形態では、通過位置X0をできるだけ正確に特定可能となるように、アップリンク領域UAが車両進行方向に並ぶ複数の分割領域UA1〜UA4に分割されている。
【0080】
具体的には、本実施形態のアップリンク領域UAは、位置dを上端とし、道路R上の位置e1〜e3を下端とする3本の境界線(境界部)BLによって合計4つに分割されている。なお、本実施形態では、図12に示す通り、各分割領域UA1〜UA4の基準位置P1〜P4は、その領域の中間地点に設定されている。
また、ビーコンヘッド8の内部には、アップリンク領域UAの各分割領域UA1〜UA4をそれぞれ受光領域とした4つのフォトダイオード15A〜15Dが収納されている。
【0081】
従って、例えば、最上流側に位置する分割領域UA1内で車載ヘッド210がアップリンク光UOを送出したとすると、このアップリンク光UO(図12の実線矢印)は、その分割領域UA1に対応するフォトダイオード15Aによって受光される。
そして、アップリンク光UOを最上流側の分割領域UA1に対応するフォトダイオード15Aが受光し、交通信号制御機1aの制御部101においてアップリンク情報35として認識されると、交通信号制御機1aの制御部101は、最上流側の分割領域UA1に対応する基準位置P1を車両5の通過位置X0として特定し、かつ、この基準位置P1から所定位置P0までの距離L1を選択し、ダウンリンクの切り換えを行った上で、基準位置P1と距離L1を第2のダウンリンク情報36に含め、ダウンリンク光DOを発光ダイオード14から車載装置2に送出する。
【0082】
また、他の分割領域UA2〜UA4に対応するフォトダイオード15B〜15Dが受光したアップリンク光UOによってアップリンク情報35を取得した場合は、交通信号制御機1aの制御部101は、その分割領域UA2〜UA4に対応する基準位置P2〜P3と距離L2〜L4を選択し、それらを第2のダウンリンク情報36に含め、ダウンリンクDOを発光ダイオード14から車載装置2に送出する。
かかるPD分割タイプの光ビーコン11を用いた場合には、アップリンク光UOの受光機会向上のためにアップリンク領域UAを車両進行方向に長く設定しても、個々の分割領域UA1〜UA4についてはこれを車両進行方向に狭く設定することが可能である。
【0083】
そして、PD分割タイプの光ビーコン11によれば、複数のフォトダイオード15のうちでどれが実際にアップリンク光UOを受光したかを判定することにより、走行中の車両5(車載装置2)がいずれの分割領域UA1〜UA4でアップリンク光UOを発光したかを路側で特定することができる。
従って、路側の制御部101において、アップリンク光UOを発光した車両5(車載装置2)の通過位置X0を、各分割領域UA1〜UA4の車両進行方向長さ以下の精度で求めることでき、路側で行う通過位置X0の評定精度が向上する。
【0084】
なお、PD分割タイプの光ビーコン11を用いた場合には、各分割領域UA1〜UA4に対応するフォトダイオード15A〜15Dに対する、アップリンク光UOの受光位置の変化速度を検出することにより、車両5の走行速度Vを路側で実測することもできるという利点もある。
【0085】
〔その他の変形例〕
これまで開示した実施形態はすべて例示であって制限的なものではない。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲の構成と均等の範囲内のすべての変更が本発明に含まれる。
例えば、上記各実施形態では、交通信号制御機1aの制御部101が異常判定処理を行っているが、この異常判定処理の処理主体は路側であれば特に限定されるものではなく、中央装置4の制御部401であってもよいし、光ビーコン11を個別に制御するビーコン制御機であってもよい。
【図面の簡単な説明】
【0086】
【図1】交通信号制御システムの全体構成を示す模式図である。
【図2】交通信号機の概要を示す道路平面図である。
【図3】中央装置の構成を示すブロック図である。
【図4】交通信号制御機の構成を示すブロック図である。
【図5】車載装置の構成を示すブロック図である。
【図6】ビーコンヘッドを有する光ビーコンの平面図である。
【図7】光ビーコンの通信領域を示す側面図である。
【図8】双方向光無線通信のシーケンス図である。
【図9】車両の自車位置の異常判定処理を示すための、光ビーコンと路側無線機の側面図である。
【図10】第2実施形態の位置判定システムに用いる光ビーコンと路側通信機の側面図である。
【図11】第3実施形態の位置判定システムに用いる光ビーコンの平面図である。
【図12】上記光ビーコンの通信領域を示す側面図である。
【符号の説明】
【0087】
1 交通信号機
1a 交通信号制御機
101 制御部
101A 位置特定部
101B 位置判定部
101C 送信制御部
2 車載装置
5 車両
8 ビーコンヘッド
10 路側通信機
11 光ビーコン
14 発光ダイオード(発光素子)
15 フォトダイオード(受光素子)
A 通信領域
UA アップリンク領域
UA1〜UA4 分割領域
DA ダウンリンク領域
UO アップリンク光
DO ダウンリンク光
S5 アップリンク信号(電波信号)
S6 ダウンリンク信号(電波信号)
X0 通過位置
X1 自車位置
t0 受信時刻(第1時刻)
t1 受信時刻(第2時刻)
V 走行速度
【技術分野】
【0001】
本発明は、光ビーコンと車両に搭載した車載装置との間の光無線通信を利用して、車載装置が自律的に有する自車位置が異常か否かを路側で判定するようにした位置判定システム及び方法に関するものである。
【背景技術】
【0002】
路車間通信システムを利用した交通情報サービスとして、光ビーコン、電波ビーコン又はFM多重放送を用いたいわゆるVICS(Vehicle Information and Communication System:(財)道路交通情報通信システムセンターの登録商標)が既に展開されている。このうち、光ビーコンは近赤外線を通信媒体とした光無線通信を採用しており、車載装置との双方向通信が可能となっている。
具体的には、車両の保持するビーコン間の旅行時間情報等を含むアップリンク情報が車載機からインフラ側の光ビーコンに送信され、逆に、渋滞情報、区間旅行時間情報、事象規制情報及び車線通知情報等を含むダウンリンク情報が光ビーコンから車載装置に送信されるようになっている(例えば、特許文献1参照)。
【0003】
上記光ビーコンは、光無線通信のための通信領域が道路の所定範囲に設定された投受光器(ビーコンヘッド)を備えており、このビーコンヘッドは、ダウンリンク光を送出する発光ダイオード(LED)と、車載装置からのアップリンク光を受光するフォトダイオード(PD)とを備えている。
他方、上記車載装置も、ビーコンヘッドとの間で双方向の光無線通信を行うために、発光ダイオードとフォトダイオードとを有する投受光器(車載ヘッド)を備えている。
【0004】
本出願人は、上記光ビーコンを用いた路車間通信システムを用いて、道路上に設定されたアップリンク領域の基準位置(例えば、車両進行方向の上流端)を、通信領域を通過する車両の走行位置(通過位置)とみなし、その基準位置を起点とした距離情報をダウンリンク切り替え後のダウンリンク情報に含ませることで、車両側で正確な距離情報を把握させる技術を既に提案している(例えば、特許文献2及び3参照)。
この場合、例えば、上記基準位置から下流側の所定位置(例えば、信号機の手前に設けられた停止線)までの距離情報をダウンリンク情報に含ませれば、この距離情報を受けた車載装置により、停止線の手前で車両を強制的に制動させたり、ドライバに停止や減速を促す報知を行ったりして安全運転支援を行うことができる。
【0005】
そして、光ビーコンのインタフェース規格によれば、アップリンク領域の車両進行方向の全長は1.6mと規定されている。従って、仮にこの規格通りにビーコンヘッドの通信領域が設定されておれば、アップリンク光の受光時刻と基準位置の通過時刻とをほぼ同じと見なすことで通信領域に対する車両の通過位置を特定することができ、この場合、ビーコン側で測定可能な通過位置の誤差は最大でも1.6m程度であるということになる。
【0006】
一方、VICS対応の車載装置では、光ビーコンとの光無線通信だけでなく、電波無線通信にも対応していることが多い。
この場合、車車間通信を通じて自車位置の情報を他車両とやり取りすることにより、交差点での出合い頭衝突や右左折時衝突の防止に役立てる協調システムを構成したり(特許文献4参照)、路側の電波無線通信装置への車路間通信によって自車位置を交通情報センターに通知することにより、同センターが把握する交通情報の精度向上に役立てたりすることができる。
【0007】
【特許文献1】特開2005−268925号公報
【特許文献2】特開2007−293660号公報
【特許文献3】特開2007−317166号公報
【特許文献4】特開2002−183889号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、VICS対応の車載装置では、通常、GPS(Global Positioning System)受信機で受信した測位データによって自車位置を自律的に捕捉している。しかし、このGPSによる測位データには、環境に応じて10m程度の誤差を含むことがあり、この誤差は、光ビーコンへのアップリンク光で得られる前記通過位置の誤差よりも信頼性が低い。
従って、GPSによる測位データをそのまま自車位置として採用し、車車間通信や車路間通信の際に外部に送信すると、他の車両やインフラ側との協調システムが不調になる恐れがある。
【0009】
そこで、アップリンク光の受光で特定できるより正確な前記通過位置をダウンリンク情報に含めて車載装置に通知し、この通過位置に基づいてGPSによる自車位置を車載装置において補正することが推奨される。
しかしながら、このような補正機能を車載装置に設けても、ビーコンヘッドからのダウンリンク光の受光に失敗した場合には、比較的誤差の大きいGPSによる測位データがそのまま踏襲されることになるし、また、車載装置での自車位置の管理機能に不具合がある場合には、上記補正の如何に拘わらず正確な自車位置が得られない。
【0010】
本発明は、このような実情に鑑み、車両の車載装置が自律的に有する自車位置の異常を路側で判定できるようにして、自車位置が異常な車両の存在を、当該車両やその他の車両に警告することができる位置判定システム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の位置判定システム(請求項1)は、光無線通信と電波無線通信の双方に対応する車両の車載装置が自律的に有する自車位置の異常を、路側で判定するための位置判定システムであって、前記車載装置との間で光無線通信を行うための通信領域が道路の所定範囲に設定されたビーコンヘッドと、前記車載装置との間で電波無線通信を行うための通信エリアを有しており、前記ビーコンヘッドとの光無線通信の後に前記車載装置が送信する、前記車両の自車位置に関する情報を含む電波信号よりなるアップリンク信号を受信可能な路側通信機と、前記ビーコンヘッドが受信するアップリンク光に基づいて前記通信領域に対する前記車両の通過位置を特定する位置特定部と、特定された前記通過位置と前記アップリンク信号に含まれる前記自車位置との差に基づいて、当該自車位置が異常か否かを判定する位置判定部と、を備えていることを特徴とする。
【0012】
本発明の位置判定システムによれば、上記位置特定部が、ビーコンヘッドが受信するアップリンク光に基づいて通信領域に対する車両の通過位置を特定し、上記位置判定部が、特定された通過位置とアップリンク信号に含まれる自車位置との差に基づいて、当該自車位置が異常か否かを判定するので、車両の車載装置が自律的に有する自車位置の異常を路側で判定することができる。
このため、ある車両の自車位置が異常であると判定された場合は、例えば、路側通信機を通じて各車両の車載装置にその判定結果を通知することにより、自車位置精度の悪い車両の存在を、当該車両やその他の車両に警告することができる。
【0013】
すなわち、本発明の位置判定システムにおいて、前記位置判定部が前記自車位置を異常と判定した場合に、この判定結果を含む電波信号よりなるダウンリンク信号を前記通信エリアに向けて前記路側通信機にブロードキャストで送信させる送信制御部を、更に備えていることが好ましい(請求項2)。
この場合、判定対象となった車両の車載装置が上記判定結果を含むダウンリンク信号を受信した場合には、例えば、車載ディスプレイ等によって当該判定結果を搭乗者に通知することにより、自車両の位置評定機能の不具合を搭乗者に警告することができる。
【0014】
また、判定対象となった車両以外の他車両の車載装置が上記判定結果を含むダウンリンク信号を受信した場合には、この判定結果に対応する車両からの電波信号を無視する運用に変更等することにより、誤った自車位置の情報に基づいて車車間の協調システムが継続するのを防止することができる。
【0015】
ところで、本発明の位置判定システムにおいて、前記位置判定部における判定処理は、アップリンク光によって特定される通過位置と、そのアップリンク光と同じ送信元のアップリンク信号に含まれる自車位置との差が所定範囲内か否かで行うことができる。
しかし、上記アップリンク光の受信時刻とアップリンク信号の受信時刻の間には時間的なずれがあるので、この時間的ずれを考慮せずに通過位置と自車位置との差を単純に比較しても、正確な異常判定処理を行うことができない。
【0016】
そこで、前記位置判定部は、前記通過位置と前記自車位置との差を、次の第1時刻から第2時刻までの間に前記車両が走行した走行距離と比較することにより、当該自車位置が異常か否かを判定することが好ましい(請求項3)。
(a) 前記アップリンク光を前記ビーコンヘッドが受信した第1時刻
(b) 前記アップリンク光と同じ送信元の前記車載装置からの前記アップリンク信号を前記路側通信機が受信した第2時刻
【0017】
また、本発明の位置判定システムにおいて、前記ビーコンヘッドが、前記通信領域に含まれるアップリンク領域において前記車載装置からのアップリンク光を受光する1つの受光素子を有する場合には、前記位置特定部は、前記アップリンク領域に設定された基準位置を前記車両の通過位置として特定することができる(請求項4)。
もっとも、実際に運用されている光ビーコンの通信領域、特にアップリンク領域は、車載装置からのアップリンク光をより確実に受光するために、インタフェース規格による正式寸法よりもかなり広範囲になっていることがある。
【0018】
このように通信領域が広範囲であると、通信領域内に設定した基準位置とアップリンク光の送信位置との乖離が大きくなってしまう可能性が高く、この場合には、アップリンク光に基づいて特定する実際の車両の通過位置の精度が低下する。
そこで、アップリンク領域が車両進行方向に広く設定されている場合であっても、車両の通過位置を路側で精度よく特定できるようにするため、前記ビーコンヘッドは、前記通信領域に含まれるアップリンク領域を車両進行方向に分割してなる各分割領域に対応する受光領域を有する複数の受光素子を有し、前記位置特定部は、複数の前記受光素子のうちで前記アップリンク光を受光した当該受光素子に対応する前記分割領域に設定された基準位置を前記車両の通過位置として特定することが好ましい(請求項5)。
【0019】
かかる分割領域に対応する複数の受光素子を搭載した光ビーコン(以下、「PD分割タイプ」の光ビーコンと称することがある。)は、本出願人が既に提案しているものである(特願2007−20910号の明細書参照)。
このPD分割タイプの光ビーコンを使用すれば、アップリンク光の受光機会を向上させるために、アップリンク領域を車両進行方向に長く設定する場合であっても、当該アップリンク領域を構成する個々の分割領域については、これを車両進行方向に狭く設定することが可能となる。
【0020】
また、PD分割タイプの光ビーコンでは、複数のフォトダイオードのうちでどれが実際にアップリンク光を受光したかを判定することにより、走行中の車両(車載装置)がいずれの分割領域でアップリンク光を発光したかを路側で特定することができる。
従って、この場合、アップリンク光を発光した車両(車載装置)の走行位置を、各分割領域の車両進行方向長さ以下の精度で求めることが可能となり、通過位置の評定精度を向上することができる。
【0021】
本発明の位置判定方法(請求項6)は、本発明の位置判定システム(請求項1)が行う判定方法であって、当該判定システムと同様の作用効果を奏する。
なお、本発明の位置判定方法においても、自車位置が異常であると判定された場合には、その判定結果を含む電波信号よりなるダウンリンク信号を通信エリアに向けて路側通信機にブロードキャストで送信することにより、自車両の位置評定機能の不具合を搭乗者に警告でき、また、誤った自車位置情報に基づいて他車両との間で車車間の協調システムが継続するのを防止できる。
【発明の効果】
【0022】
以上の通り、本発明によれば、車両の車載装置が自律的に有する自車位置の異常を路側で判定できるので、この判定結果を各車両の車載装置に無線送信することにより、自車位置が異常な車両の存在を当該車両やその他の車両に警告することができる。
【発明を実施するための最良の形態】
【0023】
以下、添付図面を参照しつつ、本発明の実施形態を詳細に説明する。
〔第1実施形態〕
〔システムの全体構成〕
図1は、本発明の位置判定システムの一例として例示する、交通信号制御システムの全体構成を示している。
図1に示すように、本実施形態の交通信号制御システムは、交通信号機1、車載装置2(図2参照)、車両感知器3、中央装置4、光ビーコン11のビーコンヘッド8、及び、車載装置2を搭載した車両5などを含む。
【0024】
各交通信号機1は、複数の交差点Ci(i=1〜12)のそれぞれに設置され、電話回線等の通信回線6を介してルータ7に接続されている。このルータ7は交通管制センター内の中央装置4に接続され、中央装置4は、所定エリア内の交差点Ciの各交通信号機1とLAN(Local Area Network)を構成している。
従って、中央装置4は、各交通信号機1と双方向通信が可能であり、各交通信号機1は他の交通信号機1とも双方向通信が可能である。なお、中央装置4は、交通管制センターではなく道路上に設置してもよい。
【0025】
車両感知器3は、各交差点Ciに流入する車両台数をカウントするために、対応する各交差点Ciの上流側に設置されており、専用の通信回線を介して対応する各交通信号機1と繋がっている。また、光ビーコン11は、光無線通信によって車載装置2と所定の情報交換を行うために道路の各所に設置されており、この光ビーコン11のビーコンヘッド8も専用の通信回線を介して各交通信号機1と繋がっている。
なお、図1では、図示を簡略化するために、各交差点Ciに信号灯器1bが1つだけ描写されているが、実際の各交差点Ciには、例えば図2に示すように、互いに交差する道路の上り下り用として4つの信号灯器1bが設置されている。
【0026】
〔中央装置〕
図3は、中央装置4の構成を示すブロック図である。
図3に示すように、中央装置4は、制御部401、表示部402、通信部403、記憶部404及び操作部405を含んでいる。
中央装置4の制御部401は、ワークステーション(WS)やパーソナルコンピュータ(PC)等よりなり、内部バスを介して上記ハードウェア各部と繋がっており、これら各部の動作を制御する。
【0027】
また、中央装置4の制御部401は、交通信号機1に繋がれた車両感知器3やビーコンヘッド8等からの各種の交通データを収集・処理(演算)・記録し、そのデータに基づいて信号制御や交通情報の提供等を統括的に行う。
例えば、制御部401は、自身のネットワークに属する交差点Ciの交通信号機1に対して、同一道路上の交通信号機1群を調整する系統制御や、この系統制御を道路網に拡張した広域制御(面制御)を行うものである。
【0028】
中央装置4の表示部402は、自身が管理するエリアの道路地図と、この道路地図上のすべての交通信号機1、車両感知器3及びビーコンヘッド8等の位置が表示された表示画面により構成され、中央オペレータに渋滞や事故等の交通状況を報知するものである。
中央装置4の通信部403は、通信回線6を介してLAN側と接続された通信インタフェースであり、所定時間ごとに信号灯器1bの灯色切り替えタイミング等に関する信号制御指令S1と、渋滞情報等よりなる交通情報S2とを各交通信号機1に送信している(図1及び図2参照)。
【0029】
信号制御指令S1は、信号制御パラメータの演算周期(例えば、1.0〜2.5分)ごとに送信され、交通情報S2は例えば5分ごとに送信される。
また、中央装置4の通信部403は、各交通信号機1から、ビーコンヘッド8から得られた車両5の旅行時間等に関するビーコン情報S3と、車両感知器3の感知信号S4とをほぼリアルタイム(例えば、0.1〜1.0秒周期)で受信している(図1及び図2参照)。
【0030】
中央装置4の記憶部404は、ハードディスクや半導体メモリ等から構成されており、前記系統制御や広域制御を行うための交通制御プログラムと、この制御に用いる交通指標の演算プログラム等を記憶している。また、記憶部404は、制御部401が生成した前記信号制御指令S1及び交通情報S2や、LAN側から取得したビーコン情報S3及び感知信号S4等を一時的に記憶する。
中央装置4の操作部405は、キーボードやマウス等の入力インタフェースよりなり、この操作部405によって中央オペレータが上記表示部402に対する表示切り替え操作等を行えるようになっている。
【0031】
〔交通信号機〕
図2は、交通信号機1の概要を示す道路平面図である。
図2では、比較的交通量の多い主道路RM1,RM2と、比較的交通量の少ない従道路RS1,RS2とが合流した交差点Cを例示している。
この交通信号機1は、主道路RM1,RM2及び従道路RS1,RS2のそれぞれに設置された4つの信号灯器1bと、この信号灯器1bと通信回線9を介して接続された交通信号制御機1aとを備えている。
【0032】
図2に示すように、本実施形態の交通信号制御機1aには、各信号灯器1bの他に、車両感知器3、ビーコンヘッド8、及び、車載装置2と電波無線通信が可能な路側通信機10が通信回線9を介して接続されている。
交通信号制御機1aは、中央装置4から信号制御指令S1を受信し、当該信号制御指令S1に基づいて、各信号灯器1bの青、黄、赤及び右折矢等の各信号灯の点灯、消灯及び点滅を制御する。
【0033】
また、交通信号制御機1aは、中央装置4から受信した交通情報S2や自身が記憶している交差点ID等をビーコンヘッド8が送出するダウンリンク情報に含め、光無線通信によって車載装置2に送信することができる。
更に、交通信号制御機1aは、ビーコンヘッド8が車載装置2から受信したビーコン情報(アップリンク情報)S3を当該ビーコンヘッド8から取得し、車両感知器5から感知信号S4を取得することができる。
【0034】
図4は、上記交通信号制御機1aの構成を示すブロック図である。
図4に示すように、交通信号制御機1aは、制御部101、灯器駆動部102、通信部103及び記憶部104を含んでいる。
交通信号制御機1aの制御部101は、1つ又は複数のマイクロコンピュータから構成されている。制御部101には、内部バスを介して灯器駆動部102、通信部103及び記憶部104が接続されており、制御部101はこれらのハードウェア各部の動作を制御する。
【0035】
この交通信号制御機1aの制御部101は、中央装置4が前記系統制御や広域制御を行った結果の出力である信号制御指令S1に従って各信号灯器1bを駆動し、その指令S1に基づく所定のタイミングで各信号灯器1bの信号灯色を切り替える。
灯器駆動部102は、半導体リレー(図示せず)を備え、上記制御部101から入力された信号出力指令S1に基づいて、複数の信号灯器1bの青色灯、黄色灯、赤色灯それぞれに対応して各色の信号灯に供給される交流電圧(AC100V)又は直流電圧をオン/オフする。
【0036】
交通信号制御機1aの通信部103は、中央装置4、車両感知器3、ビーコンヘッド8及び路側通信機10に接続されており、これらとの間で双方向の有線通信を行う通信インタフェースである。
また、路側通信機10は、交差点Cに流入する車両5の車載装置2との間で双方向の電波無線通信を行う送受信機よりなり、車載装置2が送信した電波信号よりなるアップリンク信号S5を受信し、車載装置2に対して電波信号よりなるダウンリンク信号S6を送信することができる(図2参照)。
【0037】
上記アップリンク信号S5には、少なくとも、車載装置2を搭載する車両5に対応する車両IDと、当該車両5がそれぞれ自律的に有している、例えば、緯度、経度及び高度からなる自車位置に関する情報が含まれている。また、後述する位置判定部101Bが自車位置X1を異常と判定した場合には、少なくとも当該判定結果に関する情報が上記ダウンリンク信号S6に含められる。
なお、ビーコンヘッド8での光無線通信の場合と同様に、車載装置2が有する旅行時間情報をアップリンク信号S5で路側通信機10に送信してもよいし、渋滞情報や事象規制情報等をダウンリンク信号S6で各車載装置2に送信してもよい。
【0038】
本実施形態の路側通信機10は、例えば、無線LANやWiMAX(World Interoperability for Microwave Access)等の中・広域通信装置よりなり、車両5に搭載された車載装置2との間で各種情報を電波信号S5,S6で双方向通信することができる。
また、路側通信機10は、交差点C(図2参照)に流入する各道路RM1,RM2,RS1,RS2上を走行する車両5の車載装置2と通信可能である。路側通信機10の通信エリアは、各道路RM1,RM2,RS1,RS2に設置されたビーコンヘッド9の通信領域A(図7参照)を内部に包含できる広さを有し、例えば道路延長方向で50〜200m程度に設定される。
【0039】
もっとも、路側通信機10の通信エリアは、必ずしもビーコンヘッド8の通信領域Aをすべて包含している必要はなく、この通信領域Aと一部重複する程度か、或いは、少なくともその通信領域Aの下流側近傍に近接する程度の広さであればよい。
交通信号制御機1aの記憶部104は、ハードディスクや半導体メモリ等から構成されており、一時記憶データとして、前記信号制御指令S1、交通情報S2、ビーコン情報S3、感知信号S5、アップリンク信号S5及びダウンリンク信号S6等を記憶する。
【0040】
また、交通信号制御機1aの記憶部104には、ビーコンヘッド8と車載装置2の間の光無線通信や、車載装置2と路側通信機10の間の電波無線通信を実行するための、通信制御用のコンピュータプログラムが格納されており、制御部101はこれらのコンピュータプログラムを記憶部104から読み出して、ビーコンヘッド8や路側通信機10に対する通信制御を実行する。
上記コンピュータプログラムは、車両5の車載装置2が自律的に有する自車位置の異常を判定するための判定処理を実行可能であり、その機能定義として、位置特定部101Aと、位置判定部101Bと、送信制御部101Cとを含んでいる(図4参照)。なお、これら各部による処理内容は後述する。
【0041】
〔車載装置〕
各車両5に搭載された車載装置2は、VICS対応であり、ビーコンヘッド8との間の光無線通信による双方向通信機能と、路側通信機10との間の電波無線通信による双方向通信機能と、搭乗者が設定した目的地点に案内するナビゲーション機能とを有する。
図5は、車載装置2(VICS対応)の構成を示すブロック図である。
図5に示すように、この車載装置2は、GPS処理部201、方位センサ202、車速取得部203、車載通信部204、記憶部205、操作部206、表示部207、音声出力部208、処理部209及び車載ヘッド210等を含んでいる。
【0042】
GPS処理部201は、GPS衛星からのGPS信号を受信し、GPS信号に含まれる時刻情報、GPS衛星の軌道、測位補正情報等に基づいて、車両5の自車位置(緯度、経度及び高度)を計測する。
方位センサ202は、光ファイバジャイロなどで構成されており、車両5の方位及び角速度を計測する。車速取得部203は、車速センサ(図示せず)が車輪の角速度を検出することにより計測した車両5の速度データを取得する。
【0043】
車載通信部204は、電波信号を通信媒体とした無線通信機であり、他車両5の車載装置2との間で例えばCSMA(Carrier Sense Multiple Access)方式による車車間通信を行うことができる。
また、車載通信部204は、路側通信部10の通信エリアにおいては、路側通信部10との無線通信を優先し、路側通信機10が設定したタイムスロットに従って時分割多重(TDMA:Time Division Multiple Access)方式による車路間及び路車間通信を行う。
【0044】
車載装置2の記憶部205は、ハードディスクや半導体メモリ等から構成されており、一時記憶データとして、車載通信部204や車載ヘッド210が受信した各種データを記憶している。
また、車載装置2の記憶部205は、路側の光ビーコン11や路側無線機10との間の通信制御のためのコンピュータプログラムと、目的地点への最適経路探索(カーナビゲーション)を実行するコンピュータプログラムと、その最適経路探索に必要な道路地図データ等を記憶している。
【0045】
道路地図データには、交差点データとリンクデータとが含まれている。
上記交差点データは、交差点IDと交差点の位置とを対応付けたデータである。また、上記リンクデータは、特定リンクのリンクIDに対して、特定リンクの始点・終点・補間点の位置、特定リンクの始点に接続する上流リンクのリンクID、特定リンクの終点に接続する下流リンクのリンクID、及び、特定リンクのリンクコストを対応付けたデータよりなる。
【0046】
リンクコストは、例えば、特定リンクとその終点に接続する下流リンクの組み合わせの数だけ用意されており、特定リンクの始点に進入してから当該特定リンクの終点を退出し、下流リンクの始点に進入するまでに要する時間が設定されている。
すなわち、リンクコストには、特定リンクの始点から終点までを走行するのに要するコスト(時間)と、リンクの終点から次の下流リンクの始点までを走行するのに要するコスト(時間)、つまり、交差点を通過するのに要するコストが含まれている。
【0047】
車載装置2の操作部206は、タッチパネルやボタン等から構成されており、ドライバを含む車両5の搭乗者が目的地の設定等を行えるようになっている。
車載装置2の表示部207は、車両5のダッシュボード部分に取り付けられたモニタ装置(図示せず)よりなり、処理部209が後述する感応要求処理において作成した画像データを搭乗者に表示する。また、音声出力部208は、処理部209が作成した音声データをスピーカー(図示せず)から出力する。
【0048】
車載装置2の処理部209は、1又は複数のマイクロコンピュータ等から構成されており、GPS処理部201、方位センサ202、車速取得部203、車載通信部204、記憶部205、操作部206、表示部207、音声出力部208の各処理を制御する。
また、車載装置2の処理部209は、目的地点への最適経路探索の処理結果である最適ルートを表示部207の画面上に表示し、このルート表示に重ねて車両5の自車位置を画面上に表示する。
【0049】
なお、上記最適ルートと車両5の自車位置とのマッチング処理は、GPS処理部201が計測した車両5の自車位置と、方位センサ202が計測した車両5の方位及び角速度と、車速取得部203が取得した車両5の速度とを含む各種データと、記憶部205が記憶する道路地図データとに基づいて行われる。
更に、車載装置2の処理部209は、車載通信部204において他の車両5から受信した受信信号に含まれる自車位置に基づいて、交差点Ci(図1参照)における出合い頭衝突の防止等の車車間協調処理を実行可能である。
【0050】
車載装置2の車載ヘッド210は、後述する光ビーコン11の通信領域A内において、ビーコンヘッド8との間で近赤外線光よりなる光信号の送受信を行うための投受光器であり、ビーコンヘッド8に上げるアップリンク光を送出する発光ダイオード(図示せず)等よりなる発光素子と、ビーコンヘッド8からのダウンリンク光を受光するフォトダイオード(図示せず)等からなる受光素子を内部に備えている。
この車載ヘッド210は、例えば、車両5のフロントガラスの手前のダッシュボード上に設置されている。
【0051】
〔光ビーコンの構成〕
図6は、前記ビーコンヘッド8を有する光ビーコン11の平面図である。
図6に示すように、本実施形態の光ビーコン11は、同じ方向の複数(図6の例では4つ)の車線R1〜R4を有する道路Rの脇に立設された支柱12と、この支柱12から道路R側に水平に架設した架設バー13と、この架設バー13における各車線R1〜R4に対応する位置に固定された複数のビーコンヘッド(投受光器)8とを備えている。
【0052】
各ビーコンヘッド8はそれぞれ交通信号制御機1aに接続されており、当該制御機1aによって一括制御される。
各ビーコンヘッド8の内部には、発光ダイオード14とフォトダイオード15(図7参照)が搭載されている。発光ダイオード14は、各車線R1〜R4の直下よりも上流側に向けて近赤外線を発光しており、これにより、車載装置2との間の光無線通信を行うための通信領域Aが当該ビーコンヘッド8の上流側(図6の右側)に設定されている。
【0053】
図7は、光ビーコン11の通信領域Aを示す側面図である。
図7に示すように、この通信領域Aは、車載ヘッド210のフォトダイオードがダウンリンク光を受光可能なダウンリンク領域(図7において実線のハッチングを設けた領域)DAと、ビーコンヘッド8のフォトダイオード15がアップリンク光UOを受光可能なアップリンク領域(図7において破線のハッチングを設けた領域)UAとから構成されている。
【0054】
光ビーコン(光学式車両感知器)4の「近赤外線式インタフェース規格」によれば、アップリンク領域UAは、ダウンリンク領域DAの車両進行方向の上流部分(図7の右側部分)と重複しており、ダウンリンク領域DAとアップリンク領域UAの上流端cは互いに一致している。
従って、ダウンリンク領域DAの車両進行方向長さは、通信領域A全体の同方向長さと一致する。
【0055】
また、上記規格では、一般道向けの光ビーコン4の場合で、ダウンリンク領域DAの下流端aは、投受光器8の直下の1.0〜1.3m上流側に位置し、ダウンリンク領域DAの下流端aからアップリンク領域UAの下流端bまでの距離は2.1mと規定され、アップリンク領域UAの下流端bから同領域UAの上流端cまでの距離は1.6mと規定されている。この場合、通信領域Aの車両進行方向の全長は3.7mとなる。
もっとも、各領域DA,UAの車両進行方向長さは上記各数値に限定されない。また、図7に仮想線で示すように、ダウンリンク領域DAの上流端c’をアップリンク領域の上流端cよりも更に上流側(図7の右側)に位置させる場合もある。
【0056】
〔双方向光無線通信の内容〕
図8は、ビーコンヘッド8と車載ヘッド210との間で行われる、双方向光無線通信のシーケンス図である。以下、図8を参照して、この双方向光無線通信の内容を説明する。
まず、交通信号制御機1aの制御部101は、各車線R1〜R4に対応するビーコンヘッド8から、ダウンリンクの切り替え前の第1情報として、車線通知情報を含む第1のダウンリンク情報34を、各車線R1〜R4のダウンリンク領域DAに所定の送信周期で常に送信し続けている(図8のF1)。なお、この段階では、車線通知情報には未だ車両IDは格納されていない。
【0057】
車両5が実際のダウンリンク領域DAに進入すると、車載装置2の車載ヘッド210が車線通知情報(車両ID無し)を含む第1のダウンリンク情報34を受信する。
このさい、車載装置2の処理部209は、当該車両5が実際の通信領域A内に存在していることを認識する。その後、処理部209は、アップリンク情報35の送信を開始し(図8のF2)、このアップリンク情報35をビーコンヘッド8に対して所定の送信周期(アップリンク送信周期)で送信する(図8のF3)。
【0058】
車載装置2の処理部209は、車両5に特定の車両IDを上記アップリンク情報35に格納して当該アップリンク情報35を送信し、ビーコン間の旅行時間情報を有している場合には、この情報もアップリンク情報35に含ませる。
また、車載装置2の処理部209は、光ビーコン11側の制御機でもある交通信号制御機1aの制御部101が、ダウンリンクの切り替えを行ったことを認識するまで、当該アップリンク情報35を送信し続ける。
【0059】
一方、光ビーコン11のビーコンヘッド8がアップリンク情報35受信すると(図8のF4)、制御部101は、ダウンリンクの切り替えを行い、第2情報として、車両ID情報を有する車線通知情報を含む、第2のダウンリンク情報36の送信を開始し(図8のF5)、この第2のダウンリンク情報36の送信を所定時間内において可能な限り繰り返す(図8のF6)。
【0060】
上記車線通知情報には、車線R1〜R4(図2)ごとに車両IDを格納するフィールドがあり、各車両IDに対して車線番号を付与することができる。このため、異なる車線R1〜R4を走行する各車両5の車載装置2の処理部209は、その格納フィールド内のいずれに自車両の車両IDが含まれるかを判断することにより、自車両がどの車線R1〜R4を走行しているかを認識できる。
第2のダウンリンク情報36には、車両IDを含む車線通知情報の他に、渋滞情報、区間旅行時間情報、事象規制情報、及び、ドライバに対する安全運転支援のための支援情報等が含まれており、この支援情報には、信号情報と走行位置情報とが含まれている。
【0061】
このうち、信号情報は、光ビーコン11より下流側の信号灯器1bの灯色(青、赤、黄又は青矢印等)が変わるタイミング情報である。
走行位置情報は、ビーコン通過時における車両5の実際の走行位置(通信領域Aに対する通過位置)に関する情報である。本実施形態では、アップリンク領域UAの上流端c(図7参照)が基準位置に設定され、この基準位置cをビーコン通過時における車両5の通過位置と見なしている。また、走行位置情報には、上記基準位置cからその下流側の所定位置P0(例えば、停止線40)までの距離L0も含まれている。
【0062】
図8の右側に示すように、第2のダウンリンク情報36は、単一又は複数の最小フレーム37で構成されている。前記「近赤外線式インタフェース規格」によれば、この最小フレーム37のデータ量は合計128バイトと規定され、ヘッダ部38に5バイト、実データ部39に123バイトが割り当てられている。
前記規格によれば、第2のダウンリンク情報36は、1〜80個の最小フレーム37で構成することができ、送信可能時間は250msに設定されている。また、このダウンリンク情報36は送信すべき情報量に対応した任意数の最小フレーム37で構成され、上記送信可能時間の範囲内で繰り返し送信される。
【0063】
最小フレーム37の送信周期は約1msである。従って、例えば、3つの最小フレーム37で一つのダウンリンク情報36を構成する場合には、ダウンリンク情報36の送信周期は約3msになるので、当該ダウンリンク情報36は所定の送信可能時間(250ms)の間に約80回繰り返して送信されることになる。
車載装置2の処理部209は、第2のダウンリンク情報36を受信した時点(図8のF7)で光ビーコン11でのダウンリンクの切り替えを認識し、この時点でアップリンク情報35の送信を停止する。
【0064】
車載装置2の処理部209は、第2のダウンリンク情報36を受信すると、この情報36から信号情報と走行位置情報を抽出して位置標定を行い(図8のF8)、これらの情報に基づいてドライバに対する安全運転支援を行う。
例えば、車載装置2の処理部209は、信号情報に基づいて、下流側の信号灯器1bが近々赤信号になることを察知すると、表示部207や音声出力部208によってその旨をドライバに通知したり、走行位置情報に含まれる距離L0と現時点の車両5の走行速度とから、停止線40の手前で停止するための減速度を算出し、その減速度で車両5を制動して停止線40の手前で強制停止させたりして、安全運転支援を実行することができる。
【0065】
また、本実施形態では、車載装置2の処理部209は、ダウンリンク情報36に含まれる走行位置情報の中の通過位置(基準位置c)に基づいて、GPS処理部201によって常時捕捉している測位データを補正する自車位置の補正機能を有する。
【0066】
〔自車位置の異常判定処理〕
図9は、交通信号制御機1aの制御部101が行う自車位置の異常判定処理の内容を示すための、光ビーコン11及び路側無線機10の側面図である。以下、図9を参照して、本実施形態の異常判定処理について説明する。
図9(a)に示すように、まず、交通信号制御機1aの制御部101は、前記光無線通信のやり取りに用いられるビーコンヘッド8が受信したアップリンク光UOに基づいて、ビーコンヘッド8の通信領域Aに対する車両5の通過位置X0を特定する。
【0067】
すなわち、前記した通り、アップリンク領域UAの上流端cがビーコン通過時における車両5の実際の通過位置X0と見なされ、ビーコンヘッド8が車載装置2からアップリンク光UOを受光した受光時刻t0に、車両5が通過位置X0にあるものと推定される。
その後、例えば図9(b)に示すように、受光時刻t0以降の所定時間内(例えば、2秒以内)に、上記通過位置X0が特定された車両5からのアップリンク信号S5を路側受信機10が受信すると、交通信号制御機1aの制御部101は、そのアップリンク信号S5に含まれる自車位置X1に関する情報を抽出する。
なお、アップリンク光UOとアップリンク信号S5との対応付けは、両者に含まれる車両IDに基づいて行われる。
【0068】
そして、交通信号制御機1aの制御部101は、より正確な位置情報である通過位置X0を利用して、車両5の車載装置2が自律的に有していた自車位置X1の異常の有無を判定する。
具体的には、制御部101は、通過位置X0と自車位置X1との差を、アップリンク光UOの受信時刻(第1時刻)t0からアップリンク信号S5の受信時刻(第2時刻)t1までの間に車両5が走行した走行距離と比較することにより、自車位置X1が異常か否かを判定する。
すなわち、制御部101は、(X1−X0)の絶対値と、V×(t1−t0)(ただし、V:車両の走行速度)とを比較し、例えば、その絶対値がV×(t1−t0)よりも大きい場合には、車両5の自車位置X1が異常であると判定し、それ以下の場合には車両5の自車位置X1は正常であると判定する。
【0069】
なお、車両5の走行速度Vは、予め記憶部104に記録された設定値が使用される。或いは、車両感知器3から得られる通過車両の台数等を基に、道路Rの渋滞状況を判断することで走行速度Vを可変に設定することもできる。また、後述の第2実施形態に述べる方法等によって車両5の走行速度Vを路側で実測するようにしてもよい。更に、車両5が自律的に有する自車速度をアップリンク光UOやアップリンク信号S6に含め、車両5の走行速度Vを路側に通知することにしてもよい。
次に、交通信号制御機1aの制御部101は、自車位置X1が異常であるという判定結果となった場合には、この判定結果の情報と判定対象となった車両5の車両IDをダウンリンク信号S6に含め、このダウンリンク信号S6を、路側通信機10を通じてその通信エリアにブロードキャストで送信させる。
【0070】
このように、本実施形態の通信システムによれば、路側のインフラ装置である交通信号制御機1aの制御部101が、ビーコンヘッド8に対して車載装置2が送信したアップリンク光UOに基づいて車両5の通過位置X0を特定し、このように特定された車両5の通過位置X0とアップリンク信号S5に含まれる車両5の自車位置X1との差に基づいて、当該自車位置X1の良否を判定するので、車両5の車載装置2が自律的に有する自車位置X1の異常を路側で判定することができる。
【0071】
そして、本実施形態の通信システムによれば、上記制御部101が、車両5の自車位置X1が異常である場合に、この判定結果とこれに対応する車両IDを含むダウンリンク信号S6を、路側通信機10の通信エリアにブロードキャストで送信するので、判定対象となった車両5には、自車両の位置評定機能の不具合を通知することができ、他の車両5に対しては、自車位置X1が不正確である車両5の存在とその車両IDを通知することができる。
【0072】
このため、判定対象となった車両5の場合には、例えば、表示部207や音声出力部208で判定結果を出力することにより、車載装置2の位置評定機能の故障等を搭乗者に警告することができる。
また、他の車両5の場合には、例えば、判定結果が不良の車両5からの電波信号S6についてはこれを無視するという運用を採用することにより、誤った自車位置X1の情報に基づいて車車間の協調システムが継続するのを防止することができる。
【0073】
〔第2実施形態〕
図10は、第2実施形態の位置判定システムに用いる光ビーコン11と路側通信機10A,10Bの側面図である。
この第2実施形態と前記第1実施形態の相違は、2台の路側無線機10A,10Bで受信した信号周波数の間に生じるドップラーシフトを利用して、車両5の走行速度Vを路側で実測できるようにした点にある。
【0074】
すなわち、本実施形態では、車両進行方向に離れた位置に2台の路側無線機10A,10Bが設置されており、ビーコンヘッド8の下流側の遠方位置に第1の路側無線機10Aが設置され、ビーコンヘッド8の下流側の近接位置に第2の路側無線機10Bが設置されている。
ここで、車両5の車載装置2が送信するアップリンク信号S5の原周波数をν0 とし、第1の路側無線機10Aが受信する周波数をνA 、第2の路側無線機10Bが受信する周波数をνB 、光速をcとすると、νA 及びνB は、それぞれ次の式(1)で算出することができる。
【0075】
【数1】
【0076】
従って、νA とνB との差をとると、次の式(2)のようになる。
【数2】
【0077】
なお、上記各式(1)及び(2)において、θA とθB は、図10に示すように、ビーコンヘッド8の通信領域Aを通過する車両5から見た、各路側無線機10A,10Bに対する仰角であり、この値は、各路側無線機10A,10Bの設置場所が決まれば予め設定値として決めておくことができる。
従って、各路側無線機10A,10Bで計測した周波数νA 及びνB を式(2)に代入すれば、走行速度Vを路側において実測することができる。
【0078】
〔第3実施形態〕
図11は、第3実施形態の位置判定システムに用いる光ビーコン11の平面図であり、図12は、その光ビーコン11の通信領域Aを示す側面図である。
図11及び図12に示すように、本実施形態では、光ビーコン11がいわゆる「PD分割タイプ」のものであり、アップリンク領域UAの下流端bから同領域UAの上流端cまでの距離全体は、上記規定よりも上流側及び下流側へ長く設定されている。その結果、アップリンク領域UAは上記規定よりも車両進行方向に広がり、同時にダウンリンク領域DAも上記規定よりも車両進行方向に広がっている。
【0079】
このようにアップリンク領域UA及びダウンリンク領域DAが広くなると、車載装置2と光ビーコン4との間のアップリンク情報35及びダウンリンク情報34,36の送受信の確実性が増すが、その一方で、走行位置情報(通過位置X0や距離L0)の精度が低下する。
そこで、本実施形態では、通過位置X0をできるだけ正確に特定可能となるように、アップリンク領域UAが車両進行方向に並ぶ複数の分割領域UA1〜UA4に分割されている。
【0080】
具体的には、本実施形態のアップリンク領域UAは、位置dを上端とし、道路R上の位置e1〜e3を下端とする3本の境界線(境界部)BLによって合計4つに分割されている。なお、本実施形態では、図12に示す通り、各分割領域UA1〜UA4の基準位置P1〜P4は、その領域の中間地点に設定されている。
また、ビーコンヘッド8の内部には、アップリンク領域UAの各分割領域UA1〜UA4をそれぞれ受光領域とした4つのフォトダイオード15A〜15Dが収納されている。
【0081】
従って、例えば、最上流側に位置する分割領域UA1内で車載ヘッド210がアップリンク光UOを送出したとすると、このアップリンク光UO(図12の実線矢印)は、その分割領域UA1に対応するフォトダイオード15Aによって受光される。
そして、アップリンク光UOを最上流側の分割領域UA1に対応するフォトダイオード15Aが受光し、交通信号制御機1aの制御部101においてアップリンク情報35として認識されると、交通信号制御機1aの制御部101は、最上流側の分割領域UA1に対応する基準位置P1を車両5の通過位置X0として特定し、かつ、この基準位置P1から所定位置P0までの距離L1を選択し、ダウンリンクの切り換えを行った上で、基準位置P1と距離L1を第2のダウンリンク情報36に含め、ダウンリンク光DOを発光ダイオード14から車載装置2に送出する。
【0082】
また、他の分割領域UA2〜UA4に対応するフォトダイオード15B〜15Dが受光したアップリンク光UOによってアップリンク情報35を取得した場合は、交通信号制御機1aの制御部101は、その分割領域UA2〜UA4に対応する基準位置P2〜P3と距離L2〜L4を選択し、それらを第2のダウンリンク情報36に含め、ダウンリンクDOを発光ダイオード14から車載装置2に送出する。
かかるPD分割タイプの光ビーコン11を用いた場合には、アップリンク光UOの受光機会向上のためにアップリンク領域UAを車両進行方向に長く設定しても、個々の分割領域UA1〜UA4についてはこれを車両進行方向に狭く設定することが可能である。
【0083】
そして、PD分割タイプの光ビーコン11によれば、複数のフォトダイオード15のうちでどれが実際にアップリンク光UOを受光したかを判定することにより、走行中の車両5(車載装置2)がいずれの分割領域UA1〜UA4でアップリンク光UOを発光したかを路側で特定することができる。
従って、路側の制御部101において、アップリンク光UOを発光した車両5(車載装置2)の通過位置X0を、各分割領域UA1〜UA4の車両進行方向長さ以下の精度で求めることでき、路側で行う通過位置X0の評定精度が向上する。
【0084】
なお、PD分割タイプの光ビーコン11を用いた場合には、各分割領域UA1〜UA4に対応するフォトダイオード15A〜15Dに対する、アップリンク光UOの受光位置の変化速度を検出することにより、車両5の走行速度Vを路側で実測することもできるという利点もある。
【0085】
〔その他の変形例〕
これまで開示した実施形態はすべて例示であって制限的なものではない。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲の構成と均等の範囲内のすべての変更が本発明に含まれる。
例えば、上記各実施形態では、交通信号制御機1aの制御部101が異常判定処理を行っているが、この異常判定処理の処理主体は路側であれば特に限定されるものではなく、中央装置4の制御部401であってもよいし、光ビーコン11を個別に制御するビーコン制御機であってもよい。
【図面の簡単な説明】
【0086】
【図1】交通信号制御システムの全体構成を示す模式図である。
【図2】交通信号機の概要を示す道路平面図である。
【図3】中央装置の構成を示すブロック図である。
【図4】交通信号制御機の構成を示すブロック図である。
【図5】車載装置の構成を示すブロック図である。
【図6】ビーコンヘッドを有する光ビーコンの平面図である。
【図7】光ビーコンの通信領域を示す側面図である。
【図8】双方向光無線通信のシーケンス図である。
【図9】車両の自車位置の異常判定処理を示すための、光ビーコンと路側無線機の側面図である。
【図10】第2実施形態の位置判定システムに用いる光ビーコンと路側通信機の側面図である。
【図11】第3実施形態の位置判定システムに用いる光ビーコンの平面図である。
【図12】上記光ビーコンの通信領域を示す側面図である。
【符号の説明】
【0087】
1 交通信号機
1a 交通信号制御機
101 制御部
101A 位置特定部
101B 位置判定部
101C 送信制御部
2 車載装置
5 車両
8 ビーコンヘッド
10 路側通信機
11 光ビーコン
14 発光ダイオード(発光素子)
15 フォトダイオード(受光素子)
A 通信領域
UA アップリンク領域
UA1〜UA4 分割領域
DA ダウンリンク領域
UO アップリンク光
DO ダウンリンク光
S5 アップリンク信号(電波信号)
S6 ダウンリンク信号(電波信号)
X0 通過位置
X1 自車位置
t0 受信時刻(第1時刻)
t1 受信時刻(第2時刻)
V 走行速度
【特許請求の範囲】
【請求項1】
光無線通信と電波無線通信の双方に対応する車両の車載装置が自律的に有する自車位置の異常を、路側で判定するための位置判定システムであって、
前記車載装置との間で光無線通信を行うための通信領域が道路の所定範囲に設定されたビーコンヘッドと、
前記車載装置との間で電波無線通信を行うための通信エリアを有しており、前記ビーコンヘッドとの光無線通信の後に前記車載装置が送信する、前記車両の自車位置に関する情報を含む電波信号よりなるアップリンク信号を受信可能な路側通信機と、
前記ビーコンヘッドが受信するアップリンク光に基づいて前記通信領域に対する前記車両の通過位置を特定する位置特定部と、
特定された前記通過位置と前記アップリンク信号に含まれる前記自車位置との差に基づいて、当該自車位置が異常か否かを判定する位置判定部と、
を備えていることを特徴とする位置判定システム。
【請求項2】
前記位置判定部が前記自車位置を異常と判定した場合に、この判定結果を含む電波信号よりなるダウンリンク信号を前記通信エリアに向けて前記路側通信機にブロードキャストで送信させる送信制御部を、更に備えている請求項1に記載の位置判定システム。
【請求項3】
前記位置判定部は、前記通過位置と前記自車位置との差を、次の第1時刻から第2時刻までの間に前記車両が走行した走行距離と比較することにより、当該自車位置が異常か否かを判定する請求項1又は2に記載の位置判定システム。
(a) 前記アップリンク光を前記ビーコンヘッドが受信した第1時刻
(b) 前記アップリンク光と同じ送信元の前記車載装置からの前記アップリンク信号を前記路側通信機が受信した第2時刻
【請求項4】
前記ビーコンヘッドは、前記通信領域に含まれるアップリンク領域において前記車載装置からのアップリンク光を受光する1つの受光素子を有し、
前記位置特定部は、前記アップリンク領域に設定された基準位置を前記車両の通過位置として特定する請求項1〜3のいずれか1項に記載の位置判定システム。
【請求項5】
前記ビーコンヘッドは、前記通信領域に含まれるアップリンク領域を車両進行方向に分割してなる各分割領域に対応する受光領域を有する複数の受光素子を有し、
前記位置特定部は、複数の前記受光素子のうちで前記アップリンク光を受光した当該受光素子に対応する前記分割領域に設定された基準位置を前記車両の通過位置として特定する請求項1〜3のいずれか1項に記載の位置判定システム。
【請求項6】
光無線通信と電波無線通信の双方に対応する車両の車載装置が自律的に有する自車位置の異常を、路側で判定するようにした位置判定方法であって、
ビーコンヘッドに対して前記車載装置が送信したアップリンク光に基づいて、当該ビーコンヘッドの通信領域に対する前記車両の通過位置を路側で特定し、
前記ビーコンヘッドとの光無線通信の後に前記車載装置が送信する、前記車両の自車位置に関する情報を含む電波信号を路側で受信し、
特定した前記通過位置と受信した前記電波信号に含まれる前記自車位置との差に基づいて、当該自車位置が異常か否かを路側で判定することを特徴とする位置判定方法。
【請求項1】
光無線通信と電波無線通信の双方に対応する車両の車載装置が自律的に有する自車位置の異常を、路側で判定するための位置判定システムであって、
前記車載装置との間で光無線通信を行うための通信領域が道路の所定範囲に設定されたビーコンヘッドと、
前記車載装置との間で電波無線通信を行うための通信エリアを有しており、前記ビーコンヘッドとの光無線通信の後に前記車載装置が送信する、前記車両の自車位置に関する情報を含む電波信号よりなるアップリンク信号を受信可能な路側通信機と、
前記ビーコンヘッドが受信するアップリンク光に基づいて前記通信領域に対する前記車両の通過位置を特定する位置特定部と、
特定された前記通過位置と前記アップリンク信号に含まれる前記自車位置との差に基づいて、当該自車位置が異常か否かを判定する位置判定部と、
を備えていることを特徴とする位置判定システム。
【請求項2】
前記位置判定部が前記自車位置を異常と判定した場合に、この判定結果を含む電波信号よりなるダウンリンク信号を前記通信エリアに向けて前記路側通信機にブロードキャストで送信させる送信制御部を、更に備えている請求項1に記載の位置判定システム。
【請求項3】
前記位置判定部は、前記通過位置と前記自車位置との差を、次の第1時刻から第2時刻までの間に前記車両が走行した走行距離と比較することにより、当該自車位置が異常か否かを判定する請求項1又は2に記載の位置判定システム。
(a) 前記アップリンク光を前記ビーコンヘッドが受信した第1時刻
(b) 前記アップリンク光と同じ送信元の前記車載装置からの前記アップリンク信号を前記路側通信機が受信した第2時刻
【請求項4】
前記ビーコンヘッドは、前記通信領域に含まれるアップリンク領域において前記車載装置からのアップリンク光を受光する1つの受光素子を有し、
前記位置特定部は、前記アップリンク領域に設定された基準位置を前記車両の通過位置として特定する請求項1〜3のいずれか1項に記載の位置判定システム。
【請求項5】
前記ビーコンヘッドは、前記通信領域に含まれるアップリンク領域を車両進行方向に分割してなる各分割領域に対応する受光領域を有する複数の受光素子を有し、
前記位置特定部は、複数の前記受光素子のうちで前記アップリンク光を受光した当該受光素子に対応する前記分割領域に設定された基準位置を前記車両の通過位置として特定する請求項1〜3のいずれか1項に記載の位置判定システム。
【請求項6】
光無線通信と電波無線通信の双方に対応する車両の車載装置が自律的に有する自車位置の異常を、路側で判定するようにした位置判定方法であって、
ビーコンヘッドに対して前記車載装置が送信したアップリンク光に基づいて、当該ビーコンヘッドの通信領域に対する前記車両の通過位置を路側で特定し、
前記ビーコンヘッドとの光無線通信の後に前記車載装置が送信する、前記車両の自車位置に関する情報を含む電波信号を路側で受信し、
特定した前記通過位置と受信した前記電波信号に含まれる前記自車位置との差に基づいて、当該自車位置が異常か否かを路側で判定することを特徴とする位置判定方法。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−2260(P2010−2260A)
【公開日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願番号】特願2008−160221(P2008−160221)
【出願日】平成20年6月19日(2008.6.19)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願日】平成20年6月19日(2008.6.19)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]