
位置判定装置、位置判定方法及びコンピュータプログラム
【課題】自律航法の測位精度を向上させること。
【解決手段】自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置が、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得し、現在の位置を判定するための演算に用いられるパラメータであって、取得された場所の種別に応じたパラメータを取得し、取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する。これにより、現在位置の場所の種別に応じた演算が可能となり、自律航法の測位精度が向上する。
【解決手段】自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置が、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得し、現在の位置を判定するための演算に用いられるパラメータであって、取得された場所の種別に応じたパラメータを取得し、取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する。これにより、現在位置の場所の種別に応じた演算が可能となり、自律航法の測位精度が向上する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置を測位する自律航法の技術に関する。
【背景技術】
【0002】
歩行ナビゲーション装置やカーナビゲーション装置などの装置では、歩行者や自動車の現在位置を測位する必要がある。既存の測位手法として、GPS(Global Positioning System)やRFID(Radio Frequency IDentification)を用いた手法がある。しかしながら、GPSは高層ビルの陰や室内などのようにGPS衛星からの信号を受信できない場所では測位できないという問題があった。また、RFIDを用いた手法では、敷設およびメンテナンスに要するコストが高いことが普及の障害となり、測位できるエリアが拡がらないという問題があった。そこで、加速度センサ等のセンサを歩行者や自動車などに取り付け、センサから出力されるセンサ情報を活用して現在位置を推定する自律航法という技術が注目されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−017610号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自律航法ではGPSやRFIDを用いた手法に比べて測位精度が低いという問題があった。例えば、加速度センサによって歩行者の歩数を計数し、予め設定された歩幅に歩数を乗じることによって移動距離を算出する手法がある。この手法では、歩幅が一定であることが前提となっているため、例えば直線的な歩行が可能な場所ではある程度の測位精度を維持できるものの、直線的に歩行できない場所では測位精度が著しく低下してしまう。上記事情に鑑み、本発明は、自律航法の測位精度を向上させる技術を提供することを目的としている。
【課題を解決するための手段】
【0005】
本発明の一態様は、現在の位置を判定する位置判定装置であって、自装置の状態を検出するセンサと、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得部と、現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得部によって取得された場所の種別に応じたパラメータを取得するパラメータ取得部と、前記パラメータ取得部によって取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定部と、を備える。
【0006】
本発明の一態様は、上記の位置判定装置であって、前記場所種別取得部は、位置情報と、その位置情報が示す場所の種別とを対応付けた場所種別テーブルに基づいて、前記現在位置に対応付けられた場所の種別を表す情報を取得し、前記パラメータ取得部は、場所の種別を表す情報と、その種別の場所において現在の位置を判定する際に前記演算に用いられるパラメータと、を対応付けたパラメータテーブルに基づいて、前記場所の種別を表す情報に対応付けられたパラメータを取得する。
【0007】
本発明の一態様は、自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置が行う位置判定方法であって、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、を有する。
【0008】
本発明の一態様は、自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置に対し、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、を実行させるためのコンピュータプログラムである。
【発明の効果】
【0009】
本発明により、自律航法の測位精度を向上させることが可能となる。
【図面の簡単な説明】
【0010】
【図1】自律航法システム1のシステム構成を表すシステム構成図である。
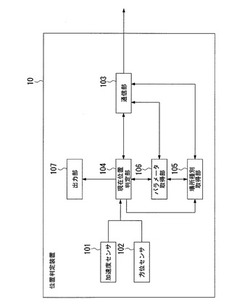
【図2】位置判定装置10の機能構成を表す概略ブロック図である。
【図3】場所種別テーブルの概略を表す図である。
【図4】パラメータテーブルの概略を表す図である。
【図5】自律航法システム1における自律航法処理の流れを表すシーケンス図である。
【図6】自律航法システム1の変形例における自律航法処理の流れを表すシーケンス図である。
【発明を実施するための形態】
【0011】
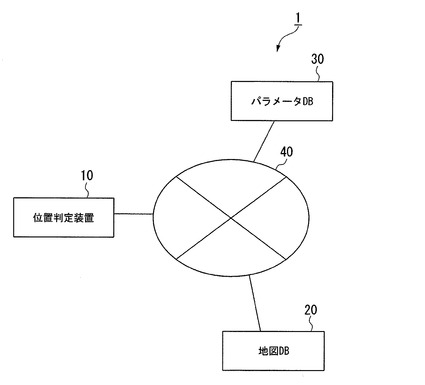
図1は、自律航法システム1のシステム構成を表すシステム構成図である。まず、自律航法システム1の概略について説明する。自律航法システム1は、位置判定装置10、地図DB20、パラメータDB30を備える。位置判定装置10、地図DB20、パラメータDB30は、互いにネットワーク40を介して通信するか、もしくは同一機器内に実装して機器内部で通信する。位置判定装置10は、測位対象の移動体とともに移動する装置であり、センサの出力に基づいて現在位置を測位する。以下の説明では、測位対象が人間である場合の実施形態について説明する。測位対象の人間は、歩行や車椅子などによって移動する。ただし、このように移動する人間は測位対象の一例であり、測位対象は自動車やその他の移動体であっても良い。
【0012】
位置判定装置10は、現在位置を測位する際に、演算に用いるパラメータを以下のような処理によって取得する。まず、位置判定装置10は、過去の測位結果に基づいて現在位置における場所種別を地図DB20から取得する。位置判定装置10は、取得した場所種別に応じたパラメータをパラメータDB30から取得する。そして、位置判定装置10は、取得したパラメータ、すなわち現在位置の場所種別に応じたパラメータを用いて、現在位置を測位する。
【0013】
次に、自律航法システム1の詳細について説明する。図2は、位置判定装置10の機能構成を表す概略ブロック図である。位置判定装置10は、バスで接続されたCPU(Central Processing Unit)やメモリや補助記憶装置などを備え、位置判定プログラムを実行する。位置判定装置10は、位置判定プログラムの実行により、加速度センサ101、方位センサ102、通信部103、現在位置判定部104、場所種別取得部105、パラメータ取得部106、出力部107を備える装置として機能する。なお、位置判定装置10の各機能の全て又は一部は、ASIC(Application Specific Integrated Circuit)やPLD(Programmable Logic Device)やFPGA(Field Programmable Gate Array)等のハードウェアを用いて実現されても良い。位置判定プログラムは、コンピュータ読み取り可能な記録媒体に記録されても良い。コンピュータ読み取り可能な記録媒体とは、例えばフレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置である。また、これはサーバに記録し、ネットワークを介して通信してもよい。
【0014】
加速度センサ101は、位置判定装置10のユーザの移動によって生じる加速度を測定する。加速度センサ101は、測定した加速度を現在位置判定部104に出力する。
方位センサ102は、位置判定装置10のユーザの移動方向を測定する。方位センサ102は、測定した移動方向を現在位置判定部104に出力する。
【0015】
通信部103は、ネットワーク40に接続された地図DB20及びパラメータDB30との間で通信を行う。具体的には、通信部103は、現在位置判定部104、場所種別取得部105、パラメータ取得部106によって生成された通信データを変調し、信号をネットワーク40へ送信する。また、通信部103は、ネットワーク40から信号を受信すると、復調することによって通信データを復元し、現在位置判定部104、場所種別取得部105、パラメータ取得部106へ転送する。
【0016】
現在位置判定部104は、現在位置を判定するタイミング(以下、「測位タイミング」と言う。)が到来すると、過去の判定結果に基づいた位置情報(以下、「暫定現在位置情報」という。)を場所種別取得部105に出力する。暫定現在位置情報とは、過去の判定結果に基づいて得られる、現在のユーザの位置として推定される位置の情報である。暫定現在位置情報は、例えば直前の判定結果が表す位置情報であっても良い。また、暫定現在位置情報は、1回前からn回前(nは2以上の整数)までの判定結果の平均位置であっても良い。また、暫定現在位置情報は、その時点で加速度センサ101及び方位センサ102から出力されている値と、直前の判定処理で用いられたパラメータとを用いて暫定的に現在位置の判定を行った結果の位置情報であっても良い。また、暫定現在位置情報は、上述したものとは異なる他の位置情報であっても良い。
【0017】
現在位置判定部104は、場所種別取得部105に対して暫定現在位置情報を出力した後に、パラメータ取得部106からパラメータを受けると、このパラメータと、その時点で加速度センサ101及び方位センサ102から出力されている値と、を用いて現在位置の判定を行う。現在位置判定部104は、判定結果を、現在位置を表す位置情報として出力部107に出力する。現在位置判定部104は、通信部103を介して、予め設定された他の装置に対して判定結果を送信しても良い。
【0018】
場所種別取得部105は、現在位置判定部104から出力された暫定現在位置情報に対応する場所種別を取得する。具体的には、場所種別取得部105は、現在位置判定部104から出力された暫定現在位置情報を含む場所種別要求を生成し、地図DB20へ送信する。地図DB20は、場所種別要求に応じて場所種別応答を送信する。場所種別取得部105は、地図DB20から場所種別応答を受信すると、受信した場所種別応答から場所種別を取得する。そして、場所種別取得部105は、取得した場所種別をパラメータ取得部106に出力する。
【0019】
パラメータ取得部106は、場所種別取得部105から出力された場所種別に対応するパラメータを取得する。具体的には、パラメータ取得部106は、場所種別取得部105から出力された場所種別を含むパラメータ要求を生成し、パラメータDB30へ送信する。パラメータDB30は、パラメータ要求に応じてパラメータ応答を送信する。パラメータ取得部106は、パラメータDB30からパラメータ応答を受信すると、受信したパラメータ応答からパラメータを取得する。そして、パラメータ取得部106は、取得したパラメータを現在位置判定部104に出力する。
【0020】
出力部107は、現在位置判定部104による判定結果を、測位対象である人間(以下、「ユーザ」という。)に対して出力する。判定結果の出力態様はどのようなものであっても良い。例えば、出力部107は、液晶ディスプレイ、有機EL(Electro Luminescence)ディスプレイ等の画像表示装置を用いて構成されても良い。この場合、出力部107は、現在位置や、現在位置に近いランドマークの名称や、目的地までの距離や、現在位置から目的地までの経路や、目的地へ向けた進行方向などを表示する。例えば、出力部107は、スピーカーやイヤホン等の音声出力装置を用いて構成されても良い。この場合、出力部107は、現在位置を表す情報や、現在位置に近いランドマークの名称や、目的地までの距離や、目的地へ向けた進行方向などを音声で出力する。
【0021】
地図DB20は、メインフレームやワークステーションやパーソナルコンピュータなどの情報処理装置を用いて構成される。地図DB20は、場所種別テーブルを記憶する。地図DB20は、場所種別要求を位置判定装置10から受信すると、場所種別要求に含まれる位置情報(暫定現在位置情報)に対応する場所種別を、場所種別テーブルから取得する。そして、地図DB20は、場所種別要求の送信元である位置判定装置10に対し、取得した場所種別を含む場所種別応答を送信する。
【0022】
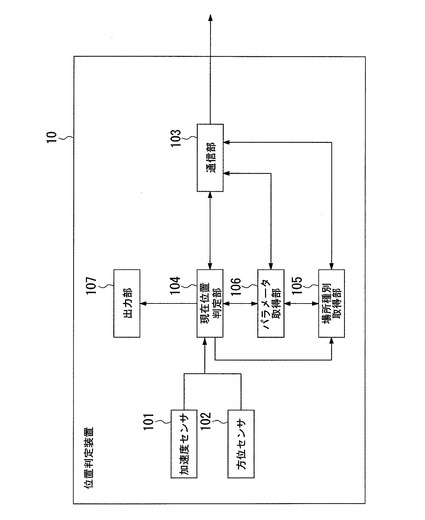
図3は、場所種別テーブルの概略を表す図である。場所種別テーブルは、位置情報と、その位置情報が示す位置の場所種別と、を対応付けたレコードを複数記憶する。位置情報は、例えば緯度及び経度によって表されても良い。図3では、X1、X2、X3、・・・が緯度を表し、Y1、Y2、Y3、・・・が経度を表す。場所種別は、その位置における経路の特徴を表す。場所種別の具体例として、直線経路、曲がり角、階段などがある。直線経路は、その位置が直線の経路上にあることを表す。曲がり角は、その位置に曲がり角があることを表す。階段は、その位置に階段があることを表す。
【0023】
場所種別は、図3に示された例に限定されず、他のどのような種別が設定されても良い。例えば、段差、傾斜地、エスカレーター乗り口、店舗前、交差点、信号のある横断歩道、信号のない横断歩道、歩道橋、ドア付近、建物の入口前、バス停、駅の改札口、踏切などがある。
図3では、(X1,Y1)の位置における場所種別は、直線経路である。すなわち、(X1,Y1)の位置は、直線の経路上の位置である。(X2,Y2)の位置における場所種別は、曲がり角である。すなわち、(X2,Y2)の位置には、曲がり角がある。(X3,Y3)の位置における場所種別は、階段である。すなわち、(X3,Y3)の位置には、階段がある。
【0024】
パラメータDB30は、メインフレームやワークステーションやパーソナルコンピュータなどの情報処理装置を用いて構成される。パラメータDB30は、パラメータテーブルを記憶する。パラメータDB30は、パラメータ要求を位置判定装置10から受信すると、パラメータ要求に含まれる場所種別に対応するパラメータを、パラメータテーブルから取得する。そして、パラメータDB30は、パラメータ要求の送信元である位置判定装置10に対し、取得したパラメータを含むパラメータ応答を送信する。
【0025】
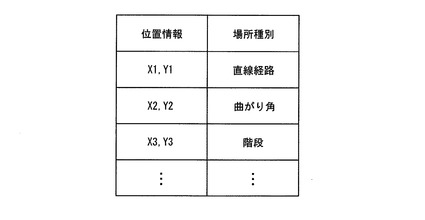
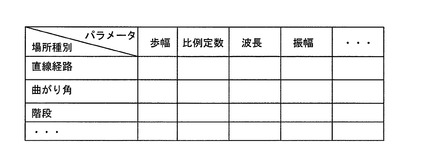
図4は、パラメータテーブルの概略を表す図である。パラメータテーブルは、場所種別と、その場所種別が示す場所において位置判定装置10が現在位置判定を行う際の演算に用いるパラメータと、を対応付けたレコードを場所種別毎に記憶する。パラメータは、一つの値又は複数の値の組み合わせとして構成される。図4の例では、パラメータは複数の値(変数又は定数)の組み合わせである。パラメータテーブルにおけるパラメータの値は、各場所種別における人間(移動体)の行動の傾向に基づいて予め統計的に得られた値である。例えば、直線経路では、一般的に人間はスピードに乗って歩行を行うため、歩幅は大きくなり、歩行速度は速い傾向になる。そのため、このような傾向に応じたパラメータが、直線経路に対応付けて設定される。一方、曲がり角では、一般的に人間は角を曲がるために減速して慎重に歩くため、歩幅は小さくなり、歩行速度は遅くなる。そのため、このような傾向に応じたパラメータが、曲がり角に対応付けて設定される。その他の場所種別でも同様にパラメータが設定される。
【0026】
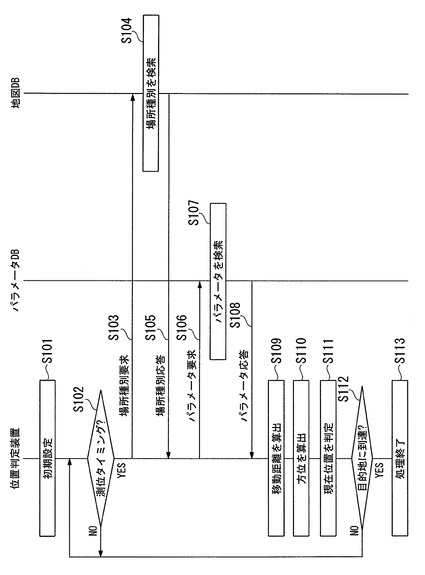
図5は、自律航法システム1における自律航法処理の流れを表すシーケンス図である。以下、図5を用いて自律航法システム1における処理の流れについて説明する。
まず、ユーザが位置判定装置10に対して初期設定を行う(ステップS101)。例えば、ユーザは初期設定の一環として、目的地の位置情報を位置判定装置10に対して入力する。この入力は、例えばボタンやタッチパネル等の物理的操作を受け付ける入力装置を用いて行われても良いし、音声入力などの入力装置を用いて行われても良い。より具体的には、目的地の住所や施設名や緯度及び経度などを入力することによって、目的地の位置情報が入力されても良い。緯度及び経度以外の位置情報が入力された場合、位置判定装置10は、地図DB20にアクセスし、入力された位置情報に基づいて目的地の緯度及び経度を取得する。また、ユーザは初期設定の一環として、現在位置を位置判定装置10に対して入力する。この入力は、例えば位置判定装置10に備えられているGPSやRFIDや画像照合による位置補正技術等の測位装置を動作させることによって行われても良いし、現在位置を表す住所や施設名や緯度及び経度などを入力することによって行われても良い。
【0027】
初期設定が完了すると、現在位置判定部104は測位タイミングが到来するまで待機する(ステップS102−NO)。測位タイミングとは、例えば所定の時間が経過したタイミングであっても良いし、ユーザが所定の操作を行ったタイミングであっても良いし、一定以上の大きさのセンサ情報が入力されたタイミングでも良いし、その他のタイミングであっても良い。測位タイミングが到来すると(ステップS102−YES)、現在位置判定部104は、過去の判定結果に基づいて得た暫定現在位置情報を場所種別取得部105に出力する。場所種別取得部105は、現在位置判定部104から出力された暫定現在位置情報を含む場所種別要求を地図DB20に送信する(ステップS103)。
【0028】
地図DB20は、場所種別要求を受信すると、場所種別テーブルを検索することによって、受信した場所種別要求に含まれる位置情報(暫定現在位置情報)に対応した場所種別を取得する(ステップS104)。地図DB20は、場所種別を取得すると、取得した場所種別を含む場所種別応答を生成し、場所種別要求の送信元である位置判定装置10に送信する(ステップS105)。場所種別取得部105は、場所種別応答を受信すると、場所種別応答に含まれる場所種別をパラメータ取得部106に出力する。
【0029】
次に、パラメータ取得部106は、場所種別取得部105から出力された場所種別を含むパラメータ要求をパラメータDB30に送信する(ステップS106)。パラメータDB30は、パラメータ要求を受信すると、パラメータテーブルを検索することによって、受信したパラメータ要求に含まれる場所種別に対応したパラメータを取得する(ステップS107)。パラメータDB30は、パラメータを取得すると、取得したパラメータを含むパラメータ応答を生成し、パラメータ要求の送信元である位置判定装置10に送信する(ステップS108)。パラメータ取得部106は、パラメータ応答を受信すると、パラメータ応答に含まれるパラメータを現在位置判定部104に出力する。
【0030】
次に、現在位置判定部104は、加速度センサ101の出力値と、パラメータ取得部106から出力されたパラメータと、に基づいて、ユーザの移動距離を算出する(ステップS109)。移動距離の演算処理には、既存の自律航法における演算処理が適用されても良い。次に、現在位置判定部104は、方位センサ102の出力値と、ステップS109の処理で算出した移動距離とに基づいて、各方位への移動距離を算出する(ステップS110)。そして、現在位置判定部104は、直前の測位タイミングで判定した位置情報と、今回の測位タイミングで算出した各方位への移動距離とに基づいて、現在位置を判定する(ステップS111)。
【0031】
次に、現在位置判定部104は、判定した現在位置が、初期設定で設定された目的地の所定の距離内であるか否か判定する(ステップS112)。所定の距離内である場合には、現在位置判定部104は目的地に到達したと判定し(ステップS112−YES)、処理を終了する(ステップS113)。一方、所定の距離内でない場合には、現在位置判定部104は目的地には到達していないと判定し(ステップS112−NO)、ステップS102の処理に戻る。
【0032】
このように構成された自律航法システム1によれば、その測位精度を向上させることが可能となる。以下、この効果について詳細に説明する。本発明に関連する自律航法では、一般的な歩行者の移動に基づいて得られたパラメータを用いて、移動時のセンサ出力に応じた演算を行い、移動距離を算出する。これに対し、自律航法システム1では、場所種別毎に特有のパラメータが予め用意される。そして、ユーザの現在の位置の場所種別に応じた特有のパラメータを用いて演算を行うことによって、移動距離を算出し、現在位置を判定する。そのため、現在の位置の場所種別に応じて適切に移動距離を算出することが可能となり、測位精度を向上させることが可能となる。
【0033】
<変形例>
場所種別取得部105は、現在位置判定部104から出力された位置情報が、ユーザによって指定された目的地の位置から所定の範囲内である場合には、場所種別要求を送信せずに、目的地付近という場所種別をパラメータ取得部106に出力するように構成されても良い。この場合、パラメータDB20は、パラメータテーブルに目的地付近という場所種別に対応付けて、所定のパラメータを予め記憶している。そのため、現在位置判定部104には、パラメータとして、目的地付近に応じたパラメータが出力される。目的地付近に応じたパラメータとは、例えば他の位置に比べて歩幅や歩行スピードが大きくなるようなパラメータである。このようなパラメータを用いた演算が行われることによって、目的地に近いことから急ぎ足になるユーザの心理的変化に基づくパラメータの変動を判定結果に反映させ、より高い測位精度で現在位置を判定することが可能となる。なお、この処理における所定の範囲は、図5のステップS112の処理で到達したか否か判定される際の範囲よりも大きい範囲である。
【0034】
位置判定装置10は、そのユーザの種別を表すユーザ種別情報を記憶するように構成されても良い。ユーザ種別情報は、例えば個人を表す識別情報であっても良いし、ユーザの健康状態(例えば、健常者、車椅子、松葉杖、全盲、弱視、介添え有り、介添え無しなど)を表す情報であっても良いし、年齢や性別を表す情報であっても良い。ユーザ種別情報は、例えば図5のステップS101における初期設定時にユーザによって設定されても良い。
【0035】
ユーザ種別情報を用いるように構成された場合、パラメータDB30は、各ユーザ種別情報に応じたパラメータテーブルを記憶するように構成される。各ユーザ種別情報に応じたパラメータテーブルにおけるパラメータの値は、各場所種別における各ユーザ種別の人間(移動体)の行動の傾向に基づいて予め統計的に得られた値である。例えば、健常者や車椅子や松葉杖の者は、直線経路では、一般的にスピードに乗って移動するため、歩幅は大きくなり、移動速度は速い傾向になる。そのため、このような傾向に応じたパラメータが、これらのユーザ種別におけるパラメータテーブルの直線経路に対応付けて設定される。一方、同じ直線経路であっても、全盲の者は、スピードに乗って移動することがないため、他の場所と比べて特に歩幅は大きくならず、移動速度も速くならない。そのため、このような傾向に応じたパラメータが、このユーザ種別におけるパラメータテーブルの直線経路に対応付けて設定される。
【0036】
このように構成された場合、パラメータ取得部106は、場所種別に加えてさらにユーザ種別情報を含むパラメータ要求を生成し送信する。また上述したように、パラメータDB30は図4に示されるようなパラメータテーブルをユーザ種別情報毎に記憶してもよい。パラメータDB30は、パラメータ要求に含まれるユーザ種別情報に応じたパラメータテーブルを選択し、パラメータ要求に含まれる場所種別に対応するパラメータをそのパラメータテーブルから検索する。そして、パラメータDB30は、検索した結果のパラメータを含むパラメータ応答を送信する。このようにパラメータが選択されることによって、ユーザの種別及び場所の種別に応じたパラメータを選択することが可能となり、より高い測位精度で現在位置を判定することが可能となる。
【0037】
また、パラメータDB30は、場所種別に関わらずユーザ種別のみに対応付けてパラメータが設定されたパラメータテーブルを記憶するように構成されても良い。この場合、パラメータ取得部106が送信するパラメータ要求には、場所種別は含まれず、ユーザ種別が含まれる。このように構成された自律航法システム1では、場所種別に関係なく、ユーザの種別のみに応じたパラメータが選択され、選択されたパラメータを用いて現在位置の判定が行われる。このような構成でも、上述したのと同等の効果を奏することが可能である。また、ユーザ種別ではなく、日時(例えば、朝、昼、夕方、夜、平日、休日など)や、状況(例えば、震災時、定常時など)や、天候(例えば、晴れ、曇り、雨、雪、台風など)など、歩行の態様や条件を変化させる因子の種別に応じたパラメータが設定されても良い。
【0038】
位置判定装置10は、場所種別テーブル及びパラメータテーブルを記憶した記憶部をさらに備えるように構成されても良い。このように構成された位置判定装置10は、ネットワーク40を介して地図DB20及びパラメータDB30と通信しなくとも、いわゆるスタンドアローンの状態で自律航法処理を行うことが可能となる。位置判定装置10は、上記テーブルのいずれか一方のみを記憶する記憶部を備えるように構成されても良い。また、位置判定装置10と地図DB20とパラメータDB30とが一つの装置(例えばロボットや車両など)に格納されても良い。この場合、ネットワーク40は、その装置内で位置判定装置10と地図DB20とパラメータDB30とが互いに通信するための通信経路として構築される。
【0039】
加速度センサ101及び方位センサ102は、位置判定装置10が備えるセンサの一例に過ぎない。現在位置判定部104が現在位置を測位できる構成であれば、位置判定装置10が備えるセンサの種類は、加速度センサ及び方位センサの組み合わせに限定される必要はない。
測位対象がカメラを備えた装置(例えばロボットや自動車など)である場合、目的地の入力はカメラによる映像に基づいて行われても良い。例えば、測位対象の装置に搭載された情報処理装置が、カメラによって撮影された映像の中から目標物を検出し、この目標物の名称や住所や緯度及び経度の情報を目的地の情報として現在位置判定部104に入力しても良い。
【0040】
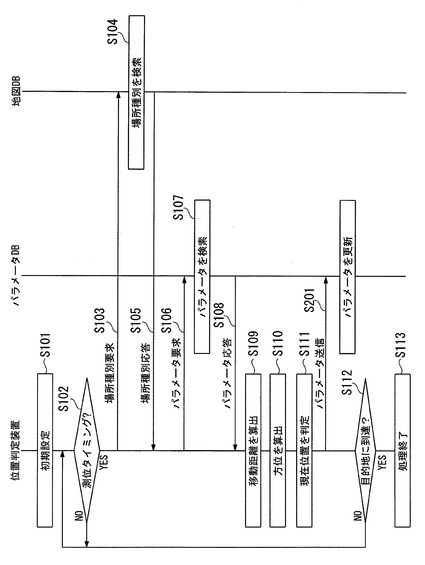
図6は、自律航法システム1の変形例における自律航法処理の流れを表すシーケンス図である。この自律航法システム1では、パラメータDB30に記憶されるパラメータテーブルの内容が、位置判定装置10の位置判定処理の結果に基づいて更新される。以下、図6に示される処理の流れについて説明する。なお、図5に示される処理と同じ部分については、図5と同じ符号を付し説明を省略する。
【0041】
ステップS111の処理の後、現在位置判定部104は、ステップS109における移動距離の算出処理の結果や加速度センサ101の出力値などに基づいて、演算に用いられるパラメータの新たな値を算出する。そして、現在位置判定部104は新たな値をパラメータDB30へ送信する(ステップS201)。このとき、現在位置判定部104は、ステップS109の処理において用いたパラメータに対応する場所種別情報とともに上記の値を送信する。
【0042】
パラメータDB30は、位置判定装置10から上記の値を受信すると、ともに受信した場所種別に対応するパラメータの値を、受信した値を用いて更新する(ステップS202)。例えば、パラメータDB30は、これまでに受信された値の数に基づいてその平均値を算出し、新たなパラメータの値としてその平均値をパラメータテーブルに登録しても良い。その他の処理は図5と同じである。
【0043】
このように更新されるパラメータの具体的な例としては、加速度センサ101の出力波形から歩行により生じた波形を抽出する際に用いられる振幅又は波長の閾値や、1歩分の波形を抽出する際に用いられる振幅又は波長の閾値などがある。より具体的には、現在位置判定部104は、パラメータDB30から通知された振幅又は波長の閾値に基づいて、加速度センサ101の出力から上記波形を抽出する。その後、現在位置判定部104は、抽出された波形の振幅又は波長の値の統計値(例えば平均値や最頻値など)を算出し、パラメータDB30へ送信する。パラメータDB30は、受信した統計値と、過去に受信した統計値とに基づいてそれらの統計値(例えば平均値や最頻値など)を算出し、算出結果を新たなパラメータとしてパラメータテーブルに登録しても良い。このとき、パラメータテーブルは、ユーザ毎に構築されても良いし、ユーザ種別情報毎に構築されても良い。ユーザ毎に構築される場合には、ユーザ毎に算出された上記の統計値に基づいて、各ユーザのパラメータテーブルの値が決定される。一方、ユーザ種別情報毎に構築される場合には、同一のユーザ種別情報を有する複数のユーザについて算出された上記の統計値に基づいて、それらの統計値(例えば平均値や最頻値など)が算出され、各ユーザ種別情報に応じたパラメータテーブルの値が決定される。
【0044】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0045】
1…自律航法システム, 10…位置判定装置, 20…地図DB, 30…パラメータDB, 40…ネットワーク, 101…加速度センサ, 102…方位センサ, 103…通信部, 104…現在位置判定部, 105…場所種別取得部, 106…パラメータ取得部, 107…出力部
【技術分野】
【0001】
本発明は、現在位置を測位する自律航法の技術に関する。
【背景技術】
【0002】
歩行ナビゲーション装置やカーナビゲーション装置などの装置では、歩行者や自動車の現在位置を測位する必要がある。既存の測位手法として、GPS(Global Positioning System)やRFID(Radio Frequency IDentification)を用いた手法がある。しかしながら、GPSは高層ビルの陰や室内などのようにGPS衛星からの信号を受信できない場所では測位できないという問題があった。また、RFIDを用いた手法では、敷設およびメンテナンスに要するコストが高いことが普及の障害となり、測位できるエリアが拡がらないという問題があった。そこで、加速度センサ等のセンサを歩行者や自動車などに取り付け、センサから出力されるセンサ情報を活用して現在位置を推定する自律航法という技術が注目されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−017610号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自律航法ではGPSやRFIDを用いた手法に比べて測位精度が低いという問題があった。例えば、加速度センサによって歩行者の歩数を計数し、予め設定された歩幅に歩数を乗じることによって移動距離を算出する手法がある。この手法では、歩幅が一定であることが前提となっているため、例えば直線的な歩行が可能な場所ではある程度の測位精度を維持できるものの、直線的に歩行できない場所では測位精度が著しく低下してしまう。上記事情に鑑み、本発明は、自律航法の測位精度を向上させる技術を提供することを目的としている。
【課題を解決するための手段】
【0005】
本発明の一態様は、現在の位置を判定する位置判定装置であって、自装置の状態を検出するセンサと、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得部と、現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得部によって取得された場所の種別に応じたパラメータを取得するパラメータ取得部と、前記パラメータ取得部によって取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定部と、を備える。
【0006】
本発明の一態様は、上記の位置判定装置であって、前記場所種別取得部は、位置情報と、その位置情報が示す場所の種別とを対応付けた場所種別テーブルに基づいて、前記現在位置に対応付けられた場所の種別を表す情報を取得し、前記パラメータ取得部は、場所の種別を表す情報と、その種別の場所において現在の位置を判定する際に前記演算に用いられるパラメータと、を対応付けたパラメータテーブルに基づいて、前記場所の種別を表す情報に対応付けられたパラメータを取得する。
【0007】
本発明の一態様は、自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置が行う位置判定方法であって、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、を有する。
【0008】
本発明の一態様は、自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置に対し、過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、を実行させるためのコンピュータプログラムである。
【発明の効果】
【0009】
本発明により、自律航法の測位精度を向上させることが可能となる。
【図面の簡単な説明】
【0010】
【図1】自律航法システム1のシステム構成を表すシステム構成図である。
【図2】位置判定装置10の機能構成を表す概略ブロック図である。
【図3】場所種別テーブルの概略を表す図である。
【図4】パラメータテーブルの概略を表す図である。
【図5】自律航法システム1における自律航法処理の流れを表すシーケンス図である。
【図6】自律航法システム1の変形例における自律航法処理の流れを表すシーケンス図である。
【発明を実施するための形態】
【0011】
図1は、自律航法システム1のシステム構成を表すシステム構成図である。まず、自律航法システム1の概略について説明する。自律航法システム1は、位置判定装置10、地図DB20、パラメータDB30を備える。位置判定装置10、地図DB20、パラメータDB30は、互いにネットワーク40を介して通信するか、もしくは同一機器内に実装して機器内部で通信する。位置判定装置10は、測位対象の移動体とともに移動する装置であり、センサの出力に基づいて現在位置を測位する。以下の説明では、測位対象が人間である場合の実施形態について説明する。測位対象の人間は、歩行や車椅子などによって移動する。ただし、このように移動する人間は測位対象の一例であり、測位対象は自動車やその他の移動体であっても良い。
【0012】
位置判定装置10は、現在位置を測位する際に、演算に用いるパラメータを以下のような処理によって取得する。まず、位置判定装置10は、過去の測位結果に基づいて現在位置における場所種別を地図DB20から取得する。位置判定装置10は、取得した場所種別に応じたパラメータをパラメータDB30から取得する。そして、位置判定装置10は、取得したパラメータ、すなわち現在位置の場所種別に応じたパラメータを用いて、現在位置を測位する。
【0013】
次に、自律航法システム1の詳細について説明する。図2は、位置判定装置10の機能構成を表す概略ブロック図である。位置判定装置10は、バスで接続されたCPU(Central Processing Unit)やメモリや補助記憶装置などを備え、位置判定プログラムを実行する。位置判定装置10は、位置判定プログラムの実行により、加速度センサ101、方位センサ102、通信部103、現在位置判定部104、場所種別取得部105、パラメータ取得部106、出力部107を備える装置として機能する。なお、位置判定装置10の各機能の全て又は一部は、ASIC(Application Specific Integrated Circuit)やPLD(Programmable Logic Device)やFPGA(Field Programmable Gate Array)等のハードウェアを用いて実現されても良い。位置判定プログラムは、コンピュータ読み取り可能な記録媒体に記録されても良い。コンピュータ読み取り可能な記録媒体とは、例えばフレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置である。また、これはサーバに記録し、ネットワークを介して通信してもよい。
【0014】
加速度センサ101は、位置判定装置10のユーザの移動によって生じる加速度を測定する。加速度センサ101は、測定した加速度を現在位置判定部104に出力する。
方位センサ102は、位置判定装置10のユーザの移動方向を測定する。方位センサ102は、測定した移動方向を現在位置判定部104に出力する。
【0015】
通信部103は、ネットワーク40に接続された地図DB20及びパラメータDB30との間で通信を行う。具体的には、通信部103は、現在位置判定部104、場所種別取得部105、パラメータ取得部106によって生成された通信データを変調し、信号をネットワーク40へ送信する。また、通信部103は、ネットワーク40から信号を受信すると、復調することによって通信データを復元し、現在位置判定部104、場所種別取得部105、パラメータ取得部106へ転送する。
【0016】
現在位置判定部104は、現在位置を判定するタイミング(以下、「測位タイミング」と言う。)が到来すると、過去の判定結果に基づいた位置情報(以下、「暫定現在位置情報」という。)を場所種別取得部105に出力する。暫定現在位置情報とは、過去の判定結果に基づいて得られる、現在のユーザの位置として推定される位置の情報である。暫定現在位置情報は、例えば直前の判定結果が表す位置情報であっても良い。また、暫定現在位置情報は、1回前からn回前(nは2以上の整数)までの判定結果の平均位置であっても良い。また、暫定現在位置情報は、その時点で加速度センサ101及び方位センサ102から出力されている値と、直前の判定処理で用いられたパラメータとを用いて暫定的に現在位置の判定を行った結果の位置情報であっても良い。また、暫定現在位置情報は、上述したものとは異なる他の位置情報であっても良い。
【0017】
現在位置判定部104は、場所種別取得部105に対して暫定現在位置情報を出力した後に、パラメータ取得部106からパラメータを受けると、このパラメータと、その時点で加速度センサ101及び方位センサ102から出力されている値と、を用いて現在位置の判定を行う。現在位置判定部104は、判定結果を、現在位置を表す位置情報として出力部107に出力する。現在位置判定部104は、通信部103を介して、予め設定された他の装置に対して判定結果を送信しても良い。
【0018】
場所種別取得部105は、現在位置判定部104から出力された暫定現在位置情報に対応する場所種別を取得する。具体的には、場所種別取得部105は、現在位置判定部104から出力された暫定現在位置情報を含む場所種別要求を生成し、地図DB20へ送信する。地図DB20は、場所種別要求に応じて場所種別応答を送信する。場所種別取得部105は、地図DB20から場所種別応答を受信すると、受信した場所種別応答から場所種別を取得する。そして、場所種別取得部105は、取得した場所種別をパラメータ取得部106に出力する。
【0019】
パラメータ取得部106は、場所種別取得部105から出力された場所種別に対応するパラメータを取得する。具体的には、パラメータ取得部106は、場所種別取得部105から出力された場所種別を含むパラメータ要求を生成し、パラメータDB30へ送信する。パラメータDB30は、パラメータ要求に応じてパラメータ応答を送信する。パラメータ取得部106は、パラメータDB30からパラメータ応答を受信すると、受信したパラメータ応答からパラメータを取得する。そして、パラメータ取得部106は、取得したパラメータを現在位置判定部104に出力する。
【0020】
出力部107は、現在位置判定部104による判定結果を、測位対象である人間(以下、「ユーザ」という。)に対して出力する。判定結果の出力態様はどのようなものであっても良い。例えば、出力部107は、液晶ディスプレイ、有機EL(Electro Luminescence)ディスプレイ等の画像表示装置を用いて構成されても良い。この場合、出力部107は、現在位置や、現在位置に近いランドマークの名称や、目的地までの距離や、現在位置から目的地までの経路や、目的地へ向けた進行方向などを表示する。例えば、出力部107は、スピーカーやイヤホン等の音声出力装置を用いて構成されても良い。この場合、出力部107は、現在位置を表す情報や、現在位置に近いランドマークの名称や、目的地までの距離や、目的地へ向けた進行方向などを音声で出力する。
【0021】
地図DB20は、メインフレームやワークステーションやパーソナルコンピュータなどの情報処理装置を用いて構成される。地図DB20は、場所種別テーブルを記憶する。地図DB20は、場所種別要求を位置判定装置10から受信すると、場所種別要求に含まれる位置情報(暫定現在位置情報)に対応する場所種別を、場所種別テーブルから取得する。そして、地図DB20は、場所種別要求の送信元である位置判定装置10に対し、取得した場所種別を含む場所種別応答を送信する。
【0022】
図3は、場所種別テーブルの概略を表す図である。場所種別テーブルは、位置情報と、その位置情報が示す位置の場所種別と、を対応付けたレコードを複数記憶する。位置情報は、例えば緯度及び経度によって表されても良い。図3では、X1、X2、X3、・・・が緯度を表し、Y1、Y2、Y3、・・・が経度を表す。場所種別は、その位置における経路の特徴を表す。場所種別の具体例として、直線経路、曲がり角、階段などがある。直線経路は、その位置が直線の経路上にあることを表す。曲がり角は、その位置に曲がり角があることを表す。階段は、その位置に階段があることを表す。
【0023】
場所種別は、図3に示された例に限定されず、他のどのような種別が設定されても良い。例えば、段差、傾斜地、エスカレーター乗り口、店舗前、交差点、信号のある横断歩道、信号のない横断歩道、歩道橋、ドア付近、建物の入口前、バス停、駅の改札口、踏切などがある。
図3では、(X1,Y1)の位置における場所種別は、直線経路である。すなわち、(X1,Y1)の位置は、直線の経路上の位置である。(X2,Y2)の位置における場所種別は、曲がり角である。すなわち、(X2,Y2)の位置には、曲がり角がある。(X3,Y3)の位置における場所種別は、階段である。すなわち、(X3,Y3)の位置には、階段がある。
【0024】
パラメータDB30は、メインフレームやワークステーションやパーソナルコンピュータなどの情報処理装置を用いて構成される。パラメータDB30は、パラメータテーブルを記憶する。パラメータDB30は、パラメータ要求を位置判定装置10から受信すると、パラメータ要求に含まれる場所種別に対応するパラメータを、パラメータテーブルから取得する。そして、パラメータDB30は、パラメータ要求の送信元である位置判定装置10に対し、取得したパラメータを含むパラメータ応答を送信する。
【0025】
図4は、パラメータテーブルの概略を表す図である。パラメータテーブルは、場所種別と、その場所種別が示す場所において位置判定装置10が現在位置判定を行う際の演算に用いるパラメータと、を対応付けたレコードを場所種別毎に記憶する。パラメータは、一つの値又は複数の値の組み合わせとして構成される。図4の例では、パラメータは複数の値(変数又は定数)の組み合わせである。パラメータテーブルにおけるパラメータの値は、各場所種別における人間(移動体)の行動の傾向に基づいて予め統計的に得られた値である。例えば、直線経路では、一般的に人間はスピードに乗って歩行を行うため、歩幅は大きくなり、歩行速度は速い傾向になる。そのため、このような傾向に応じたパラメータが、直線経路に対応付けて設定される。一方、曲がり角では、一般的に人間は角を曲がるために減速して慎重に歩くため、歩幅は小さくなり、歩行速度は遅くなる。そのため、このような傾向に応じたパラメータが、曲がり角に対応付けて設定される。その他の場所種別でも同様にパラメータが設定される。
【0026】
図5は、自律航法システム1における自律航法処理の流れを表すシーケンス図である。以下、図5を用いて自律航法システム1における処理の流れについて説明する。
まず、ユーザが位置判定装置10に対して初期設定を行う(ステップS101)。例えば、ユーザは初期設定の一環として、目的地の位置情報を位置判定装置10に対して入力する。この入力は、例えばボタンやタッチパネル等の物理的操作を受け付ける入力装置を用いて行われても良いし、音声入力などの入力装置を用いて行われても良い。より具体的には、目的地の住所や施設名や緯度及び経度などを入力することによって、目的地の位置情報が入力されても良い。緯度及び経度以外の位置情報が入力された場合、位置判定装置10は、地図DB20にアクセスし、入力された位置情報に基づいて目的地の緯度及び経度を取得する。また、ユーザは初期設定の一環として、現在位置を位置判定装置10に対して入力する。この入力は、例えば位置判定装置10に備えられているGPSやRFIDや画像照合による位置補正技術等の測位装置を動作させることによって行われても良いし、現在位置を表す住所や施設名や緯度及び経度などを入力することによって行われても良い。
【0027】
初期設定が完了すると、現在位置判定部104は測位タイミングが到来するまで待機する(ステップS102−NO)。測位タイミングとは、例えば所定の時間が経過したタイミングであっても良いし、ユーザが所定の操作を行ったタイミングであっても良いし、一定以上の大きさのセンサ情報が入力されたタイミングでも良いし、その他のタイミングであっても良い。測位タイミングが到来すると(ステップS102−YES)、現在位置判定部104は、過去の判定結果に基づいて得た暫定現在位置情報を場所種別取得部105に出力する。場所種別取得部105は、現在位置判定部104から出力された暫定現在位置情報を含む場所種別要求を地図DB20に送信する(ステップS103)。
【0028】
地図DB20は、場所種別要求を受信すると、場所種別テーブルを検索することによって、受信した場所種別要求に含まれる位置情報(暫定現在位置情報)に対応した場所種別を取得する(ステップS104)。地図DB20は、場所種別を取得すると、取得した場所種別を含む場所種別応答を生成し、場所種別要求の送信元である位置判定装置10に送信する(ステップS105)。場所種別取得部105は、場所種別応答を受信すると、場所種別応答に含まれる場所種別をパラメータ取得部106に出力する。
【0029】
次に、パラメータ取得部106は、場所種別取得部105から出力された場所種別を含むパラメータ要求をパラメータDB30に送信する(ステップS106)。パラメータDB30は、パラメータ要求を受信すると、パラメータテーブルを検索することによって、受信したパラメータ要求に含まれる場所種別に対応したパラメータを取得する(ステップS107)。パラメータDB30は、パラメータを取得すると、取得したパラメータを含むパラメータ応答を生成し、パラメータ要求の送信元である位置判定装置10に送信する(ステップS108)。パラメータ取得部106は、パラメータ応答を受信すると、パラメータ応答に含まれるパラメータを現在位置判定部104に出力する。
【0030】
次に、現在位置判定部104は、加速度センサ101の出力値と、パラメータ取得部106から出力されたパラメータと、に基づいて、ユーザの移動距離を算出する(ステップS109)。移動距離の演算処理には、既存の自律航法における演算処理が適用されても良い。次に、現在位置判定部104は、方位センサ102の出力値と、ステップS109の処理で算出した移動距離とに基づいて、各方位への移動距離を算出する(ステップS110)。そして、現在位置判定部104は、直前の測位タイミングで判定した位置情報と、今回の測位タイミングで算出した各方位への移動距離とに基づいて、現在位置を判定する(ステップS111)。
【0031】
次に、現在位置判定部104は、判定した現在位置が、初期設定で設定された目的地の所定の距離内であるか否か判定する(ステップS112)。所定の距離内である場合には、現在位置判定部104は目的地に到達したと判定し(ステップS112−YES)、処理を終了する(ステップS113)。一方、所定の距離内でない場合には、現在位置判定部104は目的地には到達していないと判定し(ステップS112−NO)、ステップS102の処理に戻る。
【0032】
このように構成された自律航法システム1によれば、その測位精度を向上させることが可能となる。以下、この効果について詳細に説明する。本発明に関連する自律航法では、一般的な歩行者の移動に基づいて得られたパラメータを用いて、移動時のセンサ出力に応じた演算を行い、移動距離を算出する。これに対し、自律航法システム1では、場所種別毎に特有のパラメータが予め用意される。そして、ユーザの現在の位置の場所種別に応じた特有のパラメータを用いて演算を行うことによって、移動距離を算出し、現在位置を判定する。そのため、現在の位置の場所種別に応じて適切に移動距離を算出することが可能となり、測位精度を向上させることが可能となる。
【0033】
<変形例>
場所種別取得部105は、現在位置判定部104から出力された位置情報が、ユーザによって指定された目的地の位置から所定の範囲内である場合には、場所種別要求を送信せずに、目的地付近という場所種別をパラメータ取得部106に出力するように構成されても良い。この場合、パラメータDB20は、パラメータテーブルに目的地付近という場所種別に対応付けて、所定のパラメータを予め記憶している。そのため、現在位置判定部104には、パラメータとして、目的地付近に応じたパラメータが出力される。目的地付近に応じたパラメータとは、例えば他の位置に比べて歩幅や歩行スピードが大きくなるようなパラメータである。このようなパラメータを用いた演算が行われることによって、目的地に近いことから急ぎ足になるユーザの心理的変化に基づくパラメータの変動を判定結果に反映させ、より高い測位精度で現在位置を判定することが可能となる。なお、この処理における所定の範囲は、図5のステップS112の処理で到達したか否か判定される際の範囲よりも大きい範囲である。
【0034】
位置判定装置10は、そのユーザの種別を表すユーザ種別情報を記憶するように構成されても良い。ユーザ種別情報は、例えば個人を表す識別情報であっても良いし、ユーザの健康状態(例えば、健常者、車椅子、松葉杖、全盲、弱視、介添え有り、介添え無しなど)を表す情報であっても良いし、年齢や性別を表す情報であっても良い。ユーザ種別情報は、例えば図5のステップS101における初期設定時にユーザによって設定されても良い。
【0035】
ユーザ種別情報を用いるように構成された場合、パラメータDB30は、各ユーザ種別情報に応じたパラメータテーブルを記憶するように構成される。各ユーザ種別情報に応じたパラメータテーブルにおけるパラメータの値は、各場所種別における各ユーザ種別の人間(移動体)の行動の傾向に基づいて予め統計的に得られた値である。例えば、健常者や車椅子や松葉杖の者は、直線経路では、一般的にスピードに乗って移動するため、歩幅は大きくなり、移動速度は速い傾向になる。そのため、このような傾向に応じたパラメータが、これらのユーザ種別におけるパラメータテーブルの直線経路に対応付けて設定される。一方、同じ直線経路であっても、全盲の者は、スピードに乗って移動することがないため、他の場所と比べて特に歩幅は大きくならず、移動速度も速くならない。そのため、このような傾向に応じたパラメータが、このユーザ種別におけるパラメータテーブルの直線経路に対応付けて設定される。
【0036】
このように構成された場合、パラメータ取得部106は、場所種別に加えてさらにユーザ種別情報を含むパラメータ要求を生成し送信する。また上述したように、パラメータDB30は図4に示されるようなパラメータテーブルをユーザ種別情報毎に記憶してもよい。パラメータDB30は、パラメータ要求に含まれるユーザ種別情報に応じたパラメータテーブルを選択し、パラメータ要求に含まれる場所種別に対応するパラメータをそのパラメータテーブルから検索する。そして、パラメータDB30は、検索した結果のパラメータを含むパラメータ応答を送信する。このようにパラメータが選択されることによって、ユーザの種別及び場所の種別に応じたパラメータを選択することが可能となり、より高い測位精度で現在位置を判定することが可能となる。
【0037】
また、パラメータDB30は、場所種別に関わらずユーザ種別のみに対応付けてパラメータが設定されたパラメータテーブルを記憶するように構成されても良い。この場合、パラメータ取得部106が送信するパラメータ要求には、場所種別は含まれず、ユーザ種別が含まれる。このように構成された自律航法システム1では、場所種別に関係なく、ユーザの種別のみに応じたパラメータが選択され、選択されたパラメータを用いて現在位置の判定が行われる。このような構成でも、上述したのと同等の効果を奏することが可能である。また、ユーザ種別ではなく、日時(例えば、朝、昼、夕方、夜、平日、休日など)や、状況(例えば、震災時、定常時など)や、天候(例えば、晴れ、曇り、雨、雪、台風など)など、歩行の態様や条件を変化させる因子の種別に応じたパラメータが設定されても良い。
【0038】
位置判定装置10は、場所種別テーブル及びパラメータテーブルを記憶した記憶部をさらに備えるように構成されても良い。このように構成された位置判定装置10は、ネットワーク40を介して地図DB20及びパラメータDB30と通信しなくとも、いわゆるスタンドアローンの状態で自律航法処理を行うことが可能となる。位置判定装置10は、上記テーブルのいずれか一方のみを記憶する記憶部を備えるように構成されても良い。また、位置判定装置10と地図DB20とパラメータDB30とが一つの装置(例えばロボットや車両など)に格納されても良い。この場合、ネットワーク40は、その装置内で位置判定装置10と地図DB20とパラメータDB30とが互いに通信するための通信経路として構築される。
【0039】
加速度センサ101及び方位センサ102は、位置判定装置10が備えるセンサの一例に過ぎない。現在位置判定部104が現在位置を測位できる構成であれば、位置判定装置10が備えるセンサの種類は、加速度センサ及び方位センサの組み合わせに限定される必要はない。
測位対象がカメラを備えた装置(例えばロボットや自動車など)である場合、目的地の入力はカメラによる映像に基づいて行われても良い。例えば、測位対象の装置に搭載された情報処理装置が、カメラによって撮影された映像の中から目標物を検出し、この目標物の名称や住所や緯度及び経度の情報を目的地の情報として現在位置判定部104に入力しても良い。
【0040】
図6は、自律航法システム1の変形例における自律航法処理の流れを表すシーケンス図である。この自律航法システム1では、パラメータDB30に記憶されるパラメータテーブルの内容が、位置判定装置10の位置判定処理の結果に基づいて更新される。以下、図6に示される処理の流れについて説明する。なお、図5に示される処理と同じ部分については、図5と同じ符号を付し説明を省略する。
【0041】
ステップS111の処理の後、現在位置判定部104は、ステップS109における移動距離の算出処理の結果や加速度センサ101の出力値などに基づいて、演算に用いられるパラメータの新たな値を算出する。そして、現在位置判定部104は新たな値をパラメータDB30へ送信する(ステップS201)。このとき、現在位置判定部104は、ステップS109の処理において用いたパラメータに対応する場所種別情報とともに上記の値を送信する。
【0042】
パラメータDB30は、位置判定装置10から上記の値を受信すると、ともに受信した場所種別に対応するパラメータの値を、受信した値を用いて更新する(ステップS202)。例えば、パラメータDB30は、これまでに受信された値の数に基づいてその平均値を算出し、新たなパラメータの値としてその平均値をパラメータテーブルに登録しても良い。その他の処理は図5と同じである。
【0043】
このように更新されるパラメータの具体的な例としては、加速度センサ101の出力波形から歩行により生じた波形を抽出する際に用いられる振幅又は波長の閾値や、1歩分の波形を抽出する際に用いられる振幅又は波長の閾値などがある。より具体的には、現在位置判定部104は、パラメータDB30から通知された振幅又は波長の閾値に基づいて、加速度センサ101の出力から上記波形を抽出する。その後、現在位置判定部104は、抽出された波形の振幅又は波長の値の統計値(例えば平均値や最頻値など)を算出し、パラメータDB30へ送信する。パラメータDB30は、受信した統計値と、過去に受信した統計値とに基づいてそれらの統計値(例えば平均値や最頻値など)を算出し、算出結果を新たなパラメータとしてパラメータテーブルに登録しても良い。このとき、パラメータテーブルは、ユーザ毎に構築されても良いし、ユーザ種別情報毎に構築されても良い。ユーザ毎に構築される場合には、ユーザ毎に算出された上記の統計値に基づいて、各ユーザのパラメータテーブルの値が決定される。一方、ユーザ種別情報毎に構築される場合には、同一のユーザ種別情報を有する複数のユーザについて算出された上記の統計値に基づいて、それらの統計値(例えば平均値や最頻値など)が算出され、各ユーザ種別情報に応じたパラメータテーブルの値が決定される。
【0044】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0045】
1…自律航法システム, 10…位置判定装置, 20…地図DB, 30…パラメータDB, 40…ネットワーク, 101…加速度センサ, 102…方位センサ, 103…通信部, 104…現在位置判定部, 105…場所種別取得部, 106…パラメータ取得部, 107…出力部
【特許請求の範囲】
【請求項1】
現在の位置を判定する位置判定装置であって、
自装置の状態を検出するセンサと、
過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得部と、
現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得部によって取得された場所の種別に応じたパラメータを取得するパラメータ取得部と、
前記パラメータ取得部によって取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定部と、
を備える位置判定装置。
【請求項2】
前記場所種別取得部は、位置情報と、その位置情報が示す場所の種別とを対応付けた場所種別テーブルに基づいて、前記現在位置に対応付けられた場所の種別を表す情報を取得し、
前記パラメータ取得部は、場所の種別を表す情報と、その種別の場所において現在の位置を判定する際に前記演算に用いられるパラメータと、を対応付けたパラメータテーブルに基づいて、前記場所の種別を表す情報に対応付けられたパラメータを取得する、請求項1に記載の位置判定装置。
【請求項3】
自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置が行う位置判定方法であって、
過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、
現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、
前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、
を有する位置判定方法。
【請求項4】
自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置に対し、
過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、
現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、
前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、
を実行させるためのコンピュータプログラム。
【請求項1】
現在の位置を判定する位置判定装置であって、
自装置の状態を検出するセンサと、
過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得部と、
現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得部によって取得された場所の種別に応じたパラメータを取得するパラメータ取得部と、
前記パラメータ取得部によって取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定部と、
を備える位置判定装置。
【請求項2】
前記場所種別取得部は、位置情報と、その位置情報が示す場所の種別とを対応付けた場所種別テーブルに基づいて、前記現在位置に対応付けられた場所の種別を表す情報を取得し、
前記パラメータ取得部は、場所の種別を表す情報と、その種別の場所において現在の位置を判定する際に前記演算に用いられるパラメータと、を対応付けたパラメータテーブルに基づいて、前記場所の種別を表す情報に対応付けられたパラメータを取得する、請求項1に記載の位置判定装置。
【請求項3】
自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置が行う位置判定方法であって、
過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、
現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、
前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、
を有する位置判定方法。
【請求項4】
自装置の状態を検出するセンサを備え、現在の位置を判定する位置判定装置に対し、
過去の判定結果に基づいて、現在位置の場所の種別を表す情報を取得する場所種別取得ステップと、
現在の位置を判定するための演算に用いられるパラメータであって、前記場所種別取得ステップにおいて取得された場所の種別に応じたパラメータを取得するパラメータ取得ステップと、
前記パラメータ取得ステップにおいて取得されたパラメータと、前記センサの出力値と、に基づいて現在の位置を判定する現在位置判定ステップと、
を実行させるためのコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−208011(P2012−208011A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73798(P2011−73798)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(399041158)西日本電信電話株式会社 (215)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(399041158)西日本電信電話株式会社 (215)
【Fターム(参考)】
[ Back to top ]