
位置制御装置
【課題】繰返し学習制御部を持つ位置制御装置において、位置偏差に多様な高調波成分が含まれる場合にも、繰返し学習制御によって、位置偏差の高い減衰性と、迅速な収束性を達成する繰返し学習制御機能を持つ位置制御装置を提供する。
【解決手段】位置偏差を離散フーリエ変換して得られたフーリエ係数ベクトルに、複数の周波数重み係数を乗じることで、周波数帯域別に成分分割し、成分毎に離散フーリエ逆変換した信号データに、最適な位相進み補償を与え加算することで、学習時の補正値データを構成する。
【解決手段】位置偏差を離散フーリエ変換して得られたフーリエ係数ベクトルに、複数の周波数重み係数を乗じることで、周波数帯域別に成分分割し、成分毎に離散フーリエ逆変換した信号データに、最適な位相進み補償を与え加算することで、学習時の補正値データを構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置制御装置、特に、数値制御機械において、回転可能に支持されている被加工物の回転角に応じて、刃具を被加工物の径方向に高速同期動作させる制御軸に搭載される繰返し学習位置制御装置に関するものである。
【背景技術】
【0002】
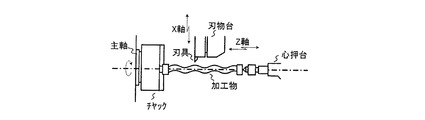
図5は、高速同期軸を搭載した数値制御機械の構造の一例を概略で示した図である。被加工物は、その一端がチャックで把持され、他端が心押台で支持されている。このため、被加工物は主軸回転に合せて回転することになる。刃具は刃物台に固定され、刃物台は複数のボールネジ(図示しない)を介して、X軸(被加工物の径方向軸)及びZ軸方向(被加工物の回転軸と平行な方向軸)に駆動される。図5では、刃具のX軸方向の動作が高速同期軸になっている。刃具は、主軸回転角に対して、X軸方向には同期動作し、Z軸方向には定速で送られることが多い。この様な複合動作により、被加工物を、ロープネジ形状等に加工することができる。
【0003】
高速同期軸では、多断面(複数回転数)分の主軸回転角に対応して形状定義された位置指令値が、予め、上位制御装置(図示しない)から、高速同期軸の位置制御装置に送られており、指令値データテーブルとして設定されている。一方で、高速同期軸では、指令値変化量が急峻なため、位置指令値に対して、一般的な追従制御系を構成しても、高い加工精度が得られない。このため、(位置指令値−位置検出値)である位置偏差Dc(以降、偏差値の呼称を併用する)を、主軸回転角に応じて収集し、学習演算操作を加えて補正値の生成を行い、(位置指令値+補正値)に対して位置制御を行う学習制御系を構成し、この補正値生成サイクルを繰返しながら、位置偏差の収束を図っていく繰返し学習制御が採用されている。
【0004】
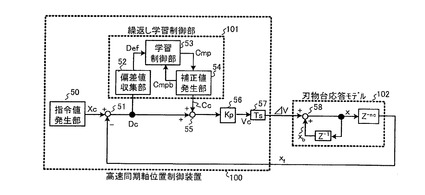
図6は、繰返し学習制御を搭載した高速同期軸位置制御装置100の構成を説明するブロック図である。指令値発生部50には、予め、上位制御装置(図示しない)により、多断面分の主軸回転角に対応した指令値データテーブルが設定されている。主軸回転角に応じて、指令値発生部50から位置指令値Xcが読み出される。刃物台応答モデル102には位置検出器(図示しない)が設置され、刃具(刃物台)の位置検出値xfが検出される。減算器51は、位置指令値Xcから位置検出値xfを減算する。
【0005】
減算器51の出力である位置偏差Dcは、補正値発生部54に設定されている補正値データテーブルから、主軸回転角に応じて読み出された補正値Ccと加算器55で加算され、増幅器56で位置ループゲインKp倍に増幅され、速度指令値Vcとなる。刃物台速度を速度指令値Vc通りに制御するため、駆動サーボモータ(図示しない)を含む速度制御ループ(図示しない)が構成される。図6では、速度制御ループは理想動作するものとして、刃物台の位置応答を、以下のように単純化させた表現で示している。
【0006】
速度指令値Vcは、増幅器57でサンプリング時間Ts当りの速度ΔVに換算され、離散値制御されて、刃物台応答モデル102に入力されている。刃物台応答モデル102の位置xは、サンプリング周期毎に加算器58で、先回の位置xbに速度ΔVを加算することで表している。なお、Z−1は、1サンプル遅れを意味する遅延演算子である。位置xは、nc回のサンプリング遅れで位置検出値xfとなって、高速同期軸位置制御装置にフィ−ドバックされる。ここで、nc回のサンプリング遅れは、位置検出処理に直接起因した遅れ時間と、駆動系のガタや撓みなどによる応答遅れを近似的に表現したものになる。
【0007】
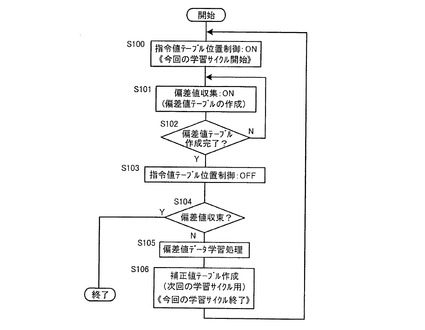
次に図6の高速同期軸位置制御装置における繰返し学習制御部について、図7の動作フローチャートを併用して説明する。繰返し学習制御が開始されると、最初にステップS100で指令値テーブル位置制御がONとなる。これは、今回の学習サイクルが開始され、前述の指令値発生部50の指令値データテーブルから位置指令値Xcが読み出され、位置制御動作が開始されることを示している。
【0008】
ステップS101では、前述の位置偏差Dcを、図6の偏差値収集部52で収集し、主軸回転角に応じた偏差値データテーブルDefの生成を開始する。指令値データテーブルに設定された多断面分の主軸回転角に対応した位置指令値が全て読出されるまで、この偏差値収集動作は継続し、位置指令値の読出しが終了し、多断面分の主軸回転角に対応した偏差値収集が終了する。偏差値テーブルの作成完了が成立すれば(ステップS102でYes)、ステップS103の指令値テーブル位置制御OFFとなる。
【0009】
ここで、予め上位制御装置(図示しない)から設定された偏差値収束基準値よりも、収集された偏差値が小さい場合は、ステップS104で偏差値収束と判定され、繰返し学習制御は終了する。逆に、偏差値収束基準値よりも、収集された偏差値が大きい場合は、偏差値未収束と判定され、ステップS105で収集された偏差値データテーブルに対する学習演算処理が、図6の学習制御部53において実行される。
【0010】
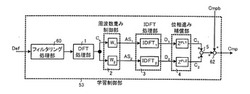
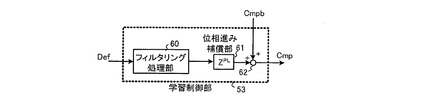
図8は、従来の学習制御部53の構成の一例を示している。学習演算処理は、偏差値データテーブルDefを入力として、偏差値データテーブルが持つノイズ成分を除去するためのフィルタリング処理部60や、位置制御の応答遅れを考慮して、予め、位相を進めた補正値データテーブルを作成するための位相進み補償部61で構成されている。位相進み補償部61では、位置制御の応答遅れ(位相遅れ)を主軸回転角θLに換算して、データテーブルピッチθpとの間で算出したPL(=θL/θp)分のテーブル位相を進ませ、加算器62で、今回学習サイクルで採用した補正値データテーブルCmpbと加算して、次回学習サイクルで採用する補正値データテーブルCmpを出力する。
【0011】
学習制御部53の出力は、学習演算処理で作成された補正値データテーブルCmpであり、補正値発生部54に設定される。この動作がステップS106の補正値テーブル作成に相当し、補正値テーブル作成が終了すると、今回の学習サイクルの終了になる。ステップS106で作成された補正値データテーブルCmpは、次回の学習サイクルで適用される補正値となり、ステップS100に戻って、次回の学習サイクルが開始されることになる。
【0012】
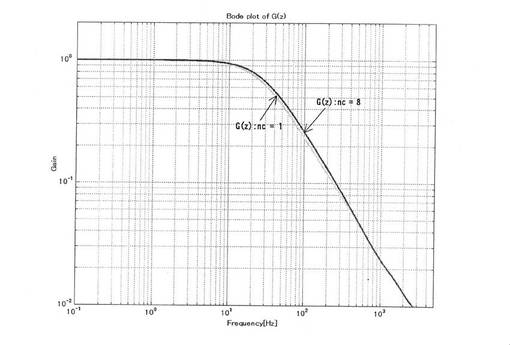
図6の高速同期軸位置制御装置の位置指令値Xcから、刃物台応答モデル102の位置検出値xfまでの位置伝達特性をG(z)(G(z)=xf/Xc)とおいて、周波数特性を示したものが図9及び図10である。なお、位置ループゲインKp=150[1/sec],サンプリング時間Ts=0.1[ms]を選んでいる。図9は、G(z)のゲイン特性を示している。位置検出値xfの応答遅れサンプリング数ncとしては、1及び8を選定しているが、応答遅れサンプリング数ncがゲイン特性に与える影響は軽微であり、150Hz程度までは応答可能であることがわかる。
【0013】
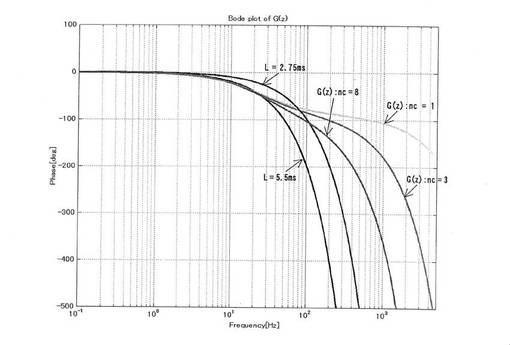
図10は、G(z)の位相特性を示している。30〜40Hz程度までの低域では、応答遅れサンプリング数ncによる位相遅れの差異は小さいが、100Hz以上の高域になると、応答遅れサンプリング数ncが大きい(nc=1→3→8)ほど、位相遅れ量の増加が著しくなることがわかる。また、図10には、遅れ時間L(L=5.5ms及び2.75msの場合)の位相特性を追記している。30〜40Hz程度までの低域では、位置伝達特性G(z)と、遅れ時間L=5.5msの位相遅れ特性は良く一致している。一方で、高域になると、遅れ時間Lの位相遅れ量は周波数比例であるのに対して、位置伝達特性G(z)の位相遅れ量の増加率は鈍り、一致性が失われていくことがわかる。
【発明の概要】
【発明が解決しようとする課題】
【0014】
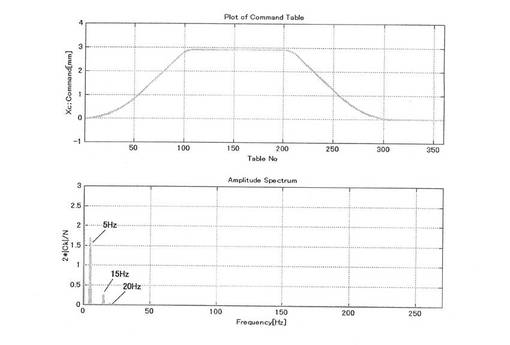
高速同期軸による位置制御動作の一例を以下に示す。図11の上側は、ロープネジの一種である台形ネジを加工する場合における指令値データテーブルを1断面分(主軸1回転=360deg)表わしている。横軸は主軸回転角、縦軸は主軸回転角1degピッチに対応して指令値データテーブルに設定されている位置指令値Xcを示している。
【0015】
本例では主軸回転数を300min−1で動作させているため、指令値基本周波数が5[Hz]で、主軸回転角1deg分の回転時間は1/1800[sec]になる。そこで、指令値データテーブルのサンプリング周波数fs=1800[Hz]として、離散フーリエ変換(以下「DFT」という)の周波数分解能fd=0.5[Hz]になるように条件(DFTデータ数N=3600)を設定し、DFT処理した周波数スペクトルを図11の下側に示す。
【0016】
ここで、横軸は周波数、縦軸は各周波数に対応する振幅スペクトル2・|Ck|/Nで、式(1)で算出されるフーリエ係数Ckから演算される。

なお、式(1)のgiは、式(2)の信号列ベクトルgの形式で表わした指令値データテーブルのi番目の要素を示している。
g = {g0,g1,g2,・・・・・,gN-1} ・・・・・ (2)
図11の周波数スペクトルから、位置指令値Xcには、基本周波数5Hzと、主要な高調波成分として15Hz及び20Hz成分が含まれていることがわかる。
【0017】
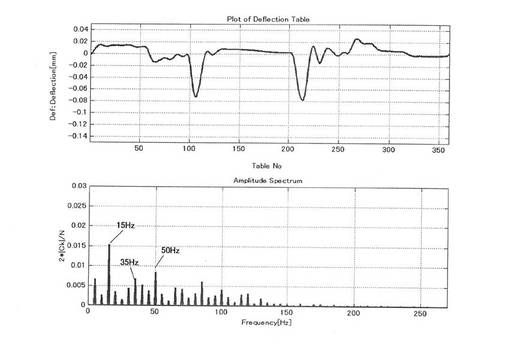
図12の上側は、本例の台形ネジ加工に関して、繰返し学習制御を実行した際の、1回目の学習サイクル時において、収集された偏差値データテーブルの中で、図11の指令値データテーブルに対応した1断面分を示している。横軸は主軸回転角、縦軸は主軸回転角1degピッチに対応して偏差値データテーブルDefに設定されている偏差値を示している。これより、位置指令値Xcの形状急変部で、大きな偏差値が発生していることがわかる。
【0018】
図12の下側は、図11の指令値データテーブルと同様に、偏差値データテーブルをDFT処理した周波数スペクトルを示している。横軸は周波数、縦軸は各周波数に対応する振幅スペクトル2・|Ck|/Nで、式(1)で算出されるフーリエ係数Ckから演算されるが、この場合のgiは、偏差値データテーブルDefのi番目の要素になる。この周波数スペクトルから、偏差値には、15Hz成分が最も大きく含まれ、位置指令値Xcには殆んど含まれない50Hz成分など、多様な高調波成分が含まれていることがわかる。
【0019】
本例の場合、1回目の学習サイクルで設定される補正値データテーブルDefには、偏差値の最大周波数成分である15Hzの偏差値が効率よく収束できる様、この周波数帯の位置制御の応答遅れ(図10で示した遅れ時間5.5ms相当の遅れ)を相殺するための位相進み補償が、図8に示した位相進み補償部61によって偏差値データテーブルに加えられることになる。具体的には、遅れ時間5.5msを主軸回転角θLに換算すると、θL=(300/60)・360・5.5・10-3=9.9deg,データテーブルピッチθp=1degだから、PL=θL/θp≒10ピッチ分のテーブル位相を進ませて補正値データテーブルCmpが生成される(なお、1回目の学習サイクルだから、補正値データテーブルCmpbは0である。)。
【0020】
以上説明したように、従来の高速同期軸の位置制御装置における繰返し学習制御では、偏差値Dcの最大周波数成分が効率よく収束できるように、偏差値データテーブルDefに加える位相進み補償を決定している。そのため、偏差値に多様な高調波成分が含まれる場合には、偏差値が十分に減衰しないことや、収束性が悪くなって繰返し学習制御の動作時間が長くなることがあった。本発明が解決しようとする課題は、偏差値Dcに多様な高調波成分が含まれる場合にも、偏差値の高い減衰性と迅速な収束性を有する繰返し学習制御を持つ高速同期軸の位置制御装置を提供することである。
【課題を解決するための手段】
【0021】
本発明は、偏差値データテーブルDefをDFT処理して得られたフーリエ係数ベクトルCkに、複数の周波数重み係数をそれぞれ乗じることで、Ckを周波数帯域別に成分分割し、成分毎にIDFT処理した信号データテーブルに、各々の最適な進みテーブル位相を与える位相進み補償を処置した後に加算して、この加算結果で補正値データテーブルを構成することにより、前記課題を解決するものである。なお、IDFTは、離散フーリエ逆変換を指す略語である。
【発明の効果】
【0022】
本発明による学習制御部を含む繰返し学習位置制御装置では、多様な高調波成分を含む偏差値に対しても、偏差値の高い減衰性と、迅速な収束性を達成でき、加工精度の向上と、繰返し学習制御に要する動作時間が短縮化できる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施形態における学習制御部の構成例を示すブロック図である。
【図2】本実施形態における周波数重み制御部が持つ重み関数の一例を示す図である。
【図3】本実施形態におけるIDFT処理部における入出力データテーブルの波形例を示す図である。
【図4】本実施形態と従来の1回目の学習サイクルで設定される補正値データテーブル、及び、学習終了時の補正値データテーブルの波形例を示す図である。
【図5】高速同期軸を搭載した数値制御機械の構造例の概略図である。
【図6】繰返し学習制御を搭載した高速同期軸位置制御装置の構成を説明するブロック図である。
【図7】繰返し学習制御の動作を説明するフローチャートである。
【図8】従来の学習制御部の構成例を示すブロック図である。
【図9】高速同期軸位置制御装置のゲイン特性を示す図である。
【図10】高速同期軸位置制御装置の位相特性を示す図である。
【図11】台形ネジの指令値データテーブル波形とDFT処理した振幅スペクトルの一例を示す図である。
【図12】台形ネジの偏差値データテーブル波形とDFT処理した振幅スペクトルの一例を示す図である。
【発明を実施するための形態】
【0024】
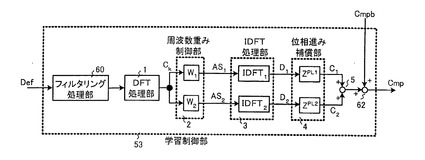
以下、本発明を実施するための最良の形態の例(以下、実施形態という)を用いて説明する。図1は、本実施形態の学習制御部の一例を示すブロック図である。以下、これまでに説明した従来例と異なる部分について説明する。偏差値データテーブルDefは、必要に応じてフィルタリング処理部60でフィルタリングされた後、DFT処理部1で、DFT処理される。得られたフーリエ係数ベクトルCkは、周波数重み制御部2に入力される。
【0025】
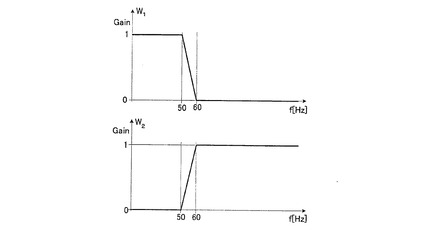
フーリエ係数ベクトルCkには、周波数重み関数W1とW2で定義された、周波数に応じたスカラ重み係数(0≦Gain≦1)が乗じられ、周波数重み制御部2からは、周波数重みが加えられたフーリエ係数ベクトルAS1とAS2が出力される。図2は、周波数重み関数W1とW2の一例を示している。本例では、周波数重み関数W1が低域周波数帯に、周波数重み関数W2が高域周波数帯に重みを付けている。ここで、周波数重み関数は、全ての周波数重み関数におけるスカラ重み係数の総和が、各周波数に対して1になる様決定されている。
【0026】
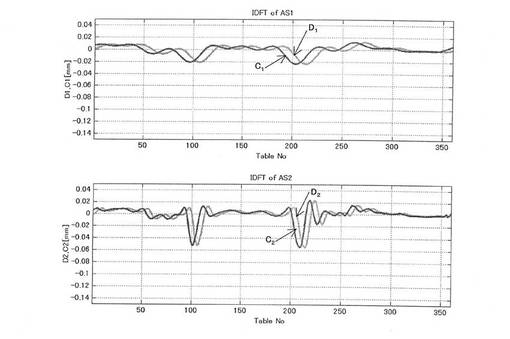
次に、周波数重みが加えられたフーリエ係数ベクトルAS1とAS2は、IDFT処理部3のIDFT1とIDFT2で離散逆フーリエ変換(IDFT)処理され、信号データテーブルD1とD2が出力される。図3は、本例における信号データテーブルD1とD2を示している。図2の周波数重み関数の特性から、信号データテーブルD1は偏差値データテーブルDefの50Hz程度までの低周波成分に対する復元信号になる。一方で、信号データテーブルD2は偏差値データテーブルDefの60Hz程度を超える高周波成分に対する復元信号になる。なお、ここでD1+D2を演算すると、偏差値データテーブルDefが復元できることになる。
【0027】
信号データテーブルD1とD2は、位相進み補償部4に入力される。信号データテーブルD1は、テーブルピッチPL1分のテーブル位相を進めた信号データテーブルC1として出力され、信号データテーブルD2は、テーブルピッチPL2分のテーブル位相を進めた信号データテーブルC2として出力される。ここで、PL1とPL2は、図10に示した位相遅れ特性から、各々5.5msと2.75msの位置制御遅れ時間が相殺できるよう、PL1=10,PL2=5を選んでいる(5.5msと2.75msを主軸回転角に換算すると、約10ピッチと約5ピッチになる。)。
【0028】
図3には、本例における信号データテーブルC1とC2を追記している。本例における1ピッチは1degだから、信号データテーブルC1とC2は、D1とD2に対して、10degと5deg位相が進んだ関係になっている。信号データテーブルC1とC2は、加算器5で加算され、更に、今回学習サイクルで採用した補正値データテーブルCmpbと加算され、次回学習サイクルで採用する補正値データテーブルCmpが出力される。
【0029】
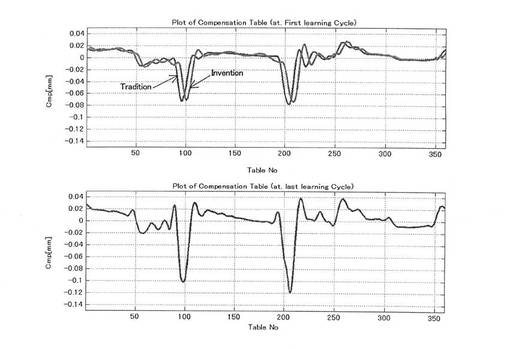
図4の上側は、本実施形態(Invention)と従来技術(Tradition)によって、1回目の学習サイクルで演算された補正値データテーブルCmpを示したものである。1回目の学習サイクルであるから、補正値データテーブルCmpbは0になる。つまり、本実施形態による補正値データテーブルCmpは、図3のC1+C2に同等で、従来技術による補正値データテーブルCmpは、図3のD1+D2を10deg分進めたものになる。
【0030】
図4の下側は、本例における繰返し学習制御が終了した時の補正値データテーブルCmpの一例を示している。学習サイクルを繰返す中で、偏差値の減少と共に、補正値が増加していくため、学習終了時の補正値データテーブルCmpの振幅は、1回目の学習サイクルにおける振幅より大きくなる。一方で、本発明による補正値データテーブルの方が、従来技術による補正値データテーブルよりも、学習終了時の補正値データテーブルと位相関係が近いため、本発明による繰返し学習制御では、偏差値の高い減衰性と迅速な収束性が期待できる。
【0031】
以上説明した本発明実施形態では、偏差値データテーブルのフーリエ係数ベクトルを、2種の周波数重み関数を用いて、2個に成分分割した場合を示しているが、偏差値データテーブルの周波数スペクトルの広がりによっては、より多数の周波数重み関数を用いて、多数に成分分割し、細かな周波数帯区分に応じて、最適な位相進み補償を加えることで、位置制御装置特性との整合に優れた補正値データテーブルの生成を行うことができる。
【符号の説明】
【0032】
1 DFT処理部、2 周波数重み制御部、3 IDFT処理部、4 位相進み補償部、5,55,58,62 加算器、50 指令値発生部、51 減算器、52 偏差値収集部、53 学習制御部、54 補正値発生部、56,57 増幅器、60 フィルタリング処理部、61 位相進み補償部、100 高速同期軸位置制御装置、101 繰返し学習制御部、102 刃物台応答モデル。
【技術分野】
【0001】
本発明は、位置制御装置、特に、数値制御機械において、回転可能に支持されている被加工物の回転角に応じて、刃具を被加工物の径方向に高速同期動作させる制御軸に搭載される繰返し学習位置制御装置に関するものである。
【背景技術】
【0002】
図5は、高速同期軸を搭載した数値制御機械の構造の一例を概略で示した図である。被加工物は、その一端がチャックで把持され、他端が心押台で支持されている。このため、被加工物は主軸回転に合せて回転することになる。刃具は刃物台に固定され、刃物台は複数のボールネジ(図示しない)を介して、X軸(被加工物の径方向軸)及びZ軸方向(被加工物の回転軸と平行な方向軸)に駆動される。図5では、刃具のX軸方向の動作が高速同期軸になっている。刃具は、主軸回転角に対して、X軸方向には同期動作し、Z軸方向には定速で送られることが多い。この様な複合動作により、被加工物を、ロープネジ形状等に加工することができる。
【0003】
高速同期軸では、多断面(複数回転数)分の主軸回転角に対応して形状定義された位置指令値が、予め、上位制御装置(図示しない)から、高速同期軸の位置制御装置に送られており、指令値データテーブルとして設定されている。一方で、高速同期軸では、指令値変化量が急峻なため、位置指令値に対して、一般的な追従制御系を構成しても、高い加工精度が得られない。このため、(位置指令値−位置検出値)である位置偏差Dc(以降、偏差値の呼称を併用する)を、主軸回転角に応じて収集し、学習演算操作を加えて補正値の生成を行い、(位置指令値+補正値)に対して位置制御を行う学習制御系を構成し、この補正値生成サイクルを繰返しながら、位置偏差の収束を図っていく繰返し学習制御が採用されている。
【0004】
図6は、繰返し学習制御を搭載した高速同期軸位置制御装置100の構成を説明するブロック図である。指令値発生部50には、予め、上位制御装置(図示しない)により、多断面分の主軸回転角に対応した指令値データテーブルが設定されている。主軸回転角に応じて、指令値発生部50から位置指令値Xcが読み出される。刃物台応答モデル102には位置検出器(図示しない)が設置され、刃具(刃物台)の位置検出値xfが検出される。減算器51は、位置指令値Xcから位置検出値xfを減算する。
【0005】
減算器51の出力である位置偏差Dcは、補正値発生部54に設定されている補正値データテーブルから、主軸回転角に応じて読み出された補正値Ccと加算器55で加算され、増幅器56で位置ループゲインKp倍に増幅され、速度指令値Vcとなる。刃物台速度を速度指令値Vc通りに制御するため、駆動サーボモータ(図示しない)を含む速度制御ループ(図示しない)が構成される。図6では、速度制御ループは理想動作するものとして、刃物台の位置応答を、以下のように単純化させた表現で示している。
【0006】
速度指令値Vcは、増幅器57でサンプリング時間Ts当りの速度ΔVに換算され、離散値制御されて、刃物台応答モデル102に入力されている。刃物台応答モデル102の位置xは、サンプリング周期毎に加算器58で、先回の位置xbに速度ΔVを加算することで表している。なお、Z−1は、1サンプル遅れを意味する遅延演算子である。位置xは、nc回のサンプリング遅れで位置検出値xfとなって、高速同期軸位置制御装置にフィ−ドバックされる。ここで、nc回のサンプリング遅れは、位置検出処理に直接起因した遅れ時間と、駆動系のガタや撓みなどによる応答遅れを近似的に表現したものになる。
【0007】
次に図6の高速同期軸位置制御装置における繰返し学習制御部について、図7の動作フローチャートを併用して説明する。繰返し学習制御が開始されると、最初にステップS100で指令値テーブル位置制御がONとなる。これは、今回の学習サイクルが開始され、前述の指令値発生部50の指令値データテーブルから位置指令値Xcが読み出され、位置制御動作が開始されることを示している。
【0008】
ステップS101では、前述の位置偏差Dcを、図6の偏差値収集部52で収集し、主軸回転角に応じた偏差値データテーブルDefの生成を開始する。指令値データテーブルに設定された多断面分の主軸回転角に対応した位置指令値が全て読出されるまで、この偏差値収集動作は継続し、位置指令値の読出しが終了し、多断面分の主軸回転角に対応した偏差値収集が終了する。偏差値テーブルの作成完了が成立すれば(ステップS102でYes)、ステップS103の指令値テーブル位置制御OFFとなる。
【0009】
ここで、予め上位制御装置(図示しない)から設定された偏差値収束基準値よりも、収集された偏差値が小さい場合は、ステップS104で偏差値収束と判定され、繰返し学習制御は終了する。逆に、偏差値収束基準値よりも、収集された偏差値が大きい場合は、偏差値未収束と判定され、ステップS105で収集された偏差値データテーブルに対する学習演算処理が、図6の学習制御部53において実行される。
【0010】
図8は、従来の学習制御部53の構成の一例を示している。学習演算処理は、偏差値データテーブルDefを入力として、偏差値データテーブルが持つノイズ成分を除去するためのフィルタリング処理部60や、位置制御の応答遅れを考慮して、予め、位相を進めた補正値データテーブルを作成するための位相進み補償部61で構成されている。位相進み補償部61では、位置制御の応答遅れ(位相遅れ)を主軸回転角θLに換算して、データテーブルピッチθpとの間で算出したPL(=θL/θp)分のテーブル位相を進ませ、加算器62で、今回学習サイクルで採用した補正値データテーブルCmpbと加算して、次回学習サイクルで採用する補正値データテーブルCmpを出力する。
【0011】
学習制御部53の出力は、学習演算処理で作成された補正値データテーブルCmpであり、補正値発生部54に設定される。この動作がステップS106の補正値テーブル作成に相当し、補正値テーブル作成が終了すると、今回の学習サイクルの終了になる。ステップS106で作成された補正値データテーブルCmpは、次回の学習サイクルで適用される補正値となり、ステップS100に戻って、次回の学習サイクルが開始されることになる。
【0012】
図6の高速同期軸位置制御装置の位置指令値Xcから、刃物台応答モデル102の位置検出値xfまでの位置伝達特性をG(z)(G(z)=xf/Xc)とおいて、周波数特性を示したものが図9及び図10である。なお、位置ループゲインKp=150[1/sec],サンプリング時間Ts=0.1[ms]を選んでいる。図9は、G(z)のゲイン特性を示している。位置検出値xfの応答遅れサンプリング数ncとしては、1及び8を選定しているが、応答遅れサンプリング数ncがゲイン特性に与える影響は軽微であり、150Hz程度までは応答可能であることがわかる。
【0013】
図10は、G(z)の位相特性を示している。30〜40Hz程度までの低域では、応答遅れサンプリング数ncによる位相遅れの差異は小さいが、100Hz以上の高域になると、応答遅れサンプリング数ncが大きい(nc=1→3→8)ほど、位相遅れ量の増加が著しくなることがわかる。また、図10には、遅れ時間L(L=5.5ms及び2.75msの場合)の位相特性を追記している。30〜40Hz程度までの低域では、位置伝達特性G(z)と、遅れ時間L=5.5msの位相遅れ特性は良く一致している。一方で、高域になると、遅れ時間Lの位相遅れ量は周波数比例であるのに対して、位置伝達特性G(z)の位相遅れ量の増加率は鈍り、一致性が失われていくことがわかる。
【発明の概要】
【発明が解決しようとする課題】
【0014】
高速同期軸による位置制御動作の一例を以下に示す。図11の上側は、ロープネジの一種である台形ネジを加工する場合における指令値データテーブルを1断面分(主軸1回転=360deg)表わしている。横軸は主軸回転角、縦軸は主軸回転角1degピッチに対応して指令値データテーブルに設定されている位置指令値Xcを示している。
【0015】
本例では主軸回転数を300min−1で動作させているため、指令値基本周波数が5[Hz]で、主軸回転角1deg分の回転時間は1/1800[sec]になる。そこで、指令値データテーブルのサンプリング周波数fs=1800[Hz]として、離散フーリエ変換(以下「DFT」という)の周波数分解能fd=0.5[Hz]になるように条件(DFTデータ数N=3600)を設定し、DFT処理した周波数スペクトルを図11の下側に示す。
【0016】
ここで、横軸は周波数、縦軸は各周波数に対応する振幅スペクトル2・|Ck|/Nで、式(1)で算出されるフーリエ係数Ckから演算される。
なお、式(1)のgiは、式(2)の信号列ベクトルgの形式で表わした指令値データテーブルのi番目の要素を示している。
g = {g0,g1,g2,・・・・・,gN-1} ・・・・・ (2)
図11の周波数スペクトルから、位置指令値Xcには、基本周波数5Hzと、主要な高調波成分として15Hz及び20Hz成分が含まれていることがわかる。
【0017】
図12の上側は、本例の台形ネジ加工に関して、繰返し学習制御を実行した際の、1回目の学習サイクル時において、収集された偏差値データテーブルの中で、図11の指令値データテーブルに対応した1断面分を示している。横軸は主軸回転角、縦軸は主軸回転角1degピッチに対応して偏差値データテーブルDefに設定されている偏差値を示している。これより、位置指令値Xcの形状急変部で、大きな偏差値が発生していることがわかる。
【0018】
図12の下側は、図11の指令値データテーブルと同様に、偏差値データテーブルをDFT処理した周波数スペクトルを示している。横軸は周波数、縦軸は各周波数に対応する振幅スペクトル2・|Ck|/Nで、式(1)で算出されるフーリエ係数Ckから演算されるが、この場合のgiは、偏差値データテーブルDefのi番目の要素になる。この周波数スペクトルから、偏差値には、15Hz成分が最も大きく含まれ、位置指令値Xcには殆んど含まれない50Hz成分など、多様な高調波成分が含まれていることがわかる。
【0019】
本例の場合、1回目の学習サイクルで設定される補正値データテーブルDefには、偏差値の最大周波数成分である15Hzの偏差値が効率よく収束できる様、この周波数帯の位置制御の応答遅れ(図10で示した遅れ時間5.5ms相当の遅れ)を相殺するための位相進み補償が、図8に示した位相進み補償部61によって偏差値データテーブルに加えられることになる。具体的には、遅れ時間5.5msを主軸回転角θLに換算すると、θL=(300/60)・360・5.5・10-3=9.9deg,データテーブルピッチθp=1degだから、PL=θL/θp≒10ピッチ分のテーブル位相を進ませて補正値データテーブルCmpが生成される(なお、1回目の学習サイクルだから、補正値データテーブルCmpbは0である。)。
【0020】
以上説明したように、従来の高速同期軸の位置制御装置における繰返し学習制御では、偏差値Dcの最大周波数成分が効率よく収束できるように、偏差値データテーブルDefに加える位相進み補償を決定している。そのため、偏差値に多様な高調波成分が含まれる場合には、偏差値が十分に減衰しないことや、収束性が悪くなって繰返し学習制御の動作時間が長くなることがあった。本発明が解決しようとする課題は、偏差値Dcに多様な高調波成分が含まれる場合にも、偏差値の高い減衰性と迅速な収束性を有する繰返し学習制御を持つ高速同期軸の位置制御装置を提供することである。
【課題を解決するための手段】
【0021】
本発明は、偏差値データテーブルDefをDFT処理して得られたフーリエ係数ベクトルCkに、複数の周波数重み係数をそれぞれ乗じることで、Ckを周波数帯域別に成分分割し、成分毎にIDFT処理した信号データテーブルに、各々の最適な進みテーブル位相を与える位相進み補償を処置した後に加算して、この加算結果で補正値データテーブルを構成することにより、前記課題を解決するものである。なお、IDFTは、離散フーリエ逆変換を指す略語である。
【発明の効果】
【0022】
本発明による学習制御部を含む繰返し学習位置制御装置では、多様な高調波成分を含む偏差値に対しても、偏差値の高い減衰性と、迅速な収束性を達成でき、加工精度の向上と、繰返し学習制御に要する動作時間が短縮化できる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施形態における学習制御部の構成例を示すブロック図である。
【図2】本実施形態における周波数重み制御部が持つ重み関数の一例を示す図である。
【図3】本実施形態におけるIDFT処理部における入出力データテーブルの波形例を示す図である。
【図4】本実施形態と従来の1回目の学習サイクルで設定される補正値データテーブル、及び、学習終了時の補正値データテーブルの波形例を示す図である。
【図5】高速同期軸を搭載した数値制御機械の構造例の概略図である。
【図6】繰返し学習制御を搭載した高速同期軸位置制御装置の構成を説明するブロック図である。
【図7】繰返し学習制御の動作を説明するフローチャートである。
【図8】従来の学習制御部の構成例を示すブロック図である。
【図9】高速同期軸位置制御装置のゲイン特性を示す図である。
【図10】高速同期軸位置制御装置の位相特性を示す図である。
【図11】台形ネジの指令値データテーブル波形とDFT処理した振幅スペクトルの一例を示す図である。
【図12】台形ネジの偏差値データテーブル波形とDFT処理した振幅スペクトルの一例を示す図である。
【発明を実施するための形態】
【0024】
以下、本発明を実施するための最良の形態の例(以下、実施形態という)を用いて説明する。図1は、本実施形態の学習制御部の一例を示すブロック図である。以下、これまでに説明した従来例と異なる部分について説明する。偏差値データテーブルDefは、必要に応じてフィルタリング処理部60でフィルタリングされた後、DFT処理部1で、DFT処理される。得られたフーリエ係数ベクトルCkは、周波数重み制御部2に入力される。
【0025】
フーリエ係数ベクトルCkには、周波数重み関数W1とW2で定義された、周波数に応じたスカラ重み係数(0≦Gain≦1)が乗じられ、周波数重み制御部2からは、周波数重みが加えられたフーリエ係数ベクトルAS1とAS2が出力される。図2は、周波数重み関数W1とW2の一例を示している。本例では、周波数重み関数W1が低域周波数帯に、周波数重み関数W2が高域周波数帯に重みを付けている。ここで、周波数重み関数は、全ての周波数重み関数におけるスカラ重み係数の総和が、各周波数に対して1になる様決定されている。
【0026】
次に、周波数重みが加えられたフーリエ係数ベクトルAS1とAS2は、IDFT処理部3のIDFT1とIDFT2で離散逆フーリエ変換(IDFT)処理され、信号データテーブルD1とD2が出力される。図3は、本例における信号データテーブルD1とD2を示している。図2の周波数重み関数の特性から、信号データテーブルD1は偏差値データテーブルDefの50Hz程度までの低周波成分に対する復元信号になる。一方で、信号データテーブルD2は偏差値データテーブルDefの60Hz程度を超える高周波成分に対する復元信号になる。なお、ここでD1+D2を演算すると、偏差値データテーブルDefが復元できることになる。
【0027】
信号データテーブルD1とD2は、位相進み補償部4に入力される。信号データテーブルD1は、テーブルピッチPL1分のテーブル位相を進めた信号データテーブルC1として出力され、信号データテーブルD2は、テーブルピッチPL2分のテーブル位相を進めた信号データテーブルC2として出力される。ここで、PL1とPL2は、図10に示した位相遅れ特性から、各々5.5msと2.75msの位置制御遅れ時間が相殺できるよう、PL1=10,PL2=5を選んでいる(5.5msと2.75msを主軸回転角に換算すると、約10ピッチと約5ピッチになる。)。
【0028】
図3には、本例における信号データテーブルC1とC2を追記している。本例における1ピッチは1degだから、信号データテーブルC1とC2は、D1とD2に対して、10degと5deg位相が進んだ関係になっている。信号データテーブルC1とC2は、加算器5で加算され、更に、今回学習サイクルで採用した補正値データテーブルCmpbと加算され、次回学習サイクルで採用する補正値データテーブルCmpが出力される。
【0029】
図4の上側は、本実施形態(Invention)と従来技術(Tradition)によって、1回目の学習サイクルで演算された補正値データテーブルCmpを示したものである。1回目の学習サイクルであるから、補正値データテーブルCmpbは0になる。つまり、本実施形態による補正値データテーブルCmpは、図3のC1+C2に同等で、従来技術による補正値データテーブルCmpは、図3のD1+D2を10deg分進めたものになる。
【0030】
図4の下側は、本例における繰返し学習制御が終了した時の補正値データテーブルCmpの一例を示している。学習サイクルを繰返す中で、偏差値の減少と共に、補正値が増加していくため、学習終了時の補正値データテーブルCmpの振幅は、1回目の学習サイクルにおける振幅より大きくなる。一方で、本発明による補正値データテーブルの方が、従来技術による補正値データテーブルよりも、学習終了時の補正値データテーブルと位相関係が近いため、本発明による繰返し学習制御では、偏差値の高い減衰性と迅速な収束性が期待できる。
【0031】
以上説明した本発明実施形態では、偏差値データテーブルのフーリエ係数ベクトルを、2種の周波数重み関数を用いて、2個に成分分割した場合を示しているが、偏差値データテーブルの周波数スペクトルの広がりによっては、より多数の周波数重み関数を用いて、多数に成分分割し、細かな周波数帯区分に応じて、最適な位相進み補償を加えることで、位置制御装置特性との整合に優れた補正値データテーブルの生成を行うことができる。
【符号の説明】
【0032】
1 DFT処理部、2 周波数重み制御部、3 IDFT処理部、4 位相進み補償部、5,55,58,62 加算器、50 指令値発生部、51 減算器、52 偏差値収集部、53 学習制御部、54 補正値発生部、56,57 増幅器、60 フィルタリング処理部、61 位相進み補償部、100 高速同期軸位置制御装置、101 繰返し学習制御部、102 刃物台応答モデル。
【特許請求の範囲】
【請求項1】
回転支持される被加工物の回転角に応じて、刃具を前記被加工物の径方向に同期動作させる数値制御機械の位置制御装置であって、繰返し学習制御部を備えた位置制御装置において、
前記繰り返し学習制御部は、
主軸回転角に応じて収集された前記刃具の位置指令値と位置検出値の偏差値である位置偏差を、離散フーリエ変換するDFT処理部と、
前記DFT処理部から出力されたフーリエ係数ベクトルに、複数の周波数重み関数それぞれを乗じて、前記フーリエ係数ベクトルを複数に成分分割する周波数重み制御部と、
前記分割された複数のフーリエ係数ベクトルを離散フーリエ逆変換するIDFT処理部と、
フーリエ逆変換された複数の信号データに位相進み補償を加える位相進み補償部と、
位相進み補償を加えた複数の信号データを加算して、補正値データを生成する加算部と、
を備えることを特徴とする繰返し学習制御を搭載した位置制御装置。
【請求項2】
請求項1に記載の位置制御装置であって、
前記複数の周波数重み関数は、その総和が各周波数に対して1になるように設定されている、ことを特徴とする位置制御装置。
【請求項1】
回転支持される被加工物の回転角に応じて、刃具を前記被加工物の径方向に同期動作させる数値制御機械の位置制御装置であって、繰返し学習制御部を備えた位置制御装置において、
前記繰り返し学習制御部は、
主軸回転角に応じて収集された前記刃具の位置指令値と位置検出値の偏差値である位置偏差を、離散フーリエ変換するDFT処理部と、
前記DFT処理部から出力されたフーリエ係数ベクトルに、複数の周波数重み関数それぞれを乗じて、前記フーリエ係数ベクトルを複数に成分分割する周波数重み制御部と、
前記分割された複数のフーリエ係数ベクトルを離散フーリエ逆変換するIDFT処理部と、
フーリエ逆変換された複数の信号データに位相進み補償を加える位相進み補償部と、
位相進み補償を加えた複数の信号データを加算して、補正値データを生成する加算部と、
を備えることを特徴とする繰返し学習制御を搭載した位置制御装置。
【請求項2】
請求項1に記載の位置制御装置であって、
前記複数の周波数重み関数は、その総和が各周波数に対して1になるように設定されている、ことを特徴とする位置制御装置。
【図1】

【図2】
【図5】
【図6】
【図7】
【図8】
【図3】
【図4】
【図9】
【図10】
【図11】
【図12】
【図2】
【図5】
【図6】
【図7】
【図8】
【図3】
【図4】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−114274(P2013−114274A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−256781(P2011−256781)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000149066)オークマ株式会社 (476)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000149066)オークマ株式会社 (476)
【Fターム(参考)】
[ Back to top ]