
位置制御装置
【課題】送り軸駆動系の剛性が低下した場合に、低周波の振動が発生せず、安定に動作させる位置制御装置を提供する。
【解決手段】移動平均段数変更器16は、位置偏差Pdifの変動に基づき、移動平均器3の移動平均段数N2を変更する。移動平均段数変更器は、位置偏差をFFT演算器にて周波数解析し、スペクトラム最大値を算出する。算出されたスペクトラム最大値が予め設定した比較値を超えた場合に、移動平均段数変更器は、移動平均段数を増加させる指令を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
【解決手段】移動平均段数変更器16は、位置偏差Pdifの変動に基づき、移動平均器3の移動平均段数N2を変更する。移動平均段数変更器は、位置偏差をFFT演算器にて周波数解析し、スペクトラム最大値を算出する。算出されたスペクトラム最大値が予め設定した比較値を超えた場合に、移動平均段数変更器は、移動平均段数を増加させる指令を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、工作機械等における送り軸(テーブル)の位置制御装置に関する。
【背景技術】
【0002】
工作機械の送り軸において、高加減速で動作させ、かつ、機械的振動を抑えるために各種の試みがなされている。加減速時の機械振動を抑えるためには、位置指令に移動平均処理やフィルタを付加し、送り軸の固有振動周波数に相当する指令成分を低減することで、加減速時の加振力が除去できる。その結果、機械振動を抑えた送り軸の制御が可能となる。しかし、経年変化による駆動系部品の磨耗・部品のゆるみ、連続動作時の温度上昇によるボールネジ伸びによるボールネジのテンション低下、機械設置状況(バランス)の変化などが原因により、送り軸機構の固有振動周波数が変化し、前記位置平均処理やフィルタがアンマッチとなり、機械振動が発生してしまう課題がある。
【0003】
図5に機械振動を抑えるための従来技術の制御ブロック図を示す。位置指令演算器1より出力された値を、移動平均器2でN1段の移動平均処理と、移動平均器3でN2段の移動平均処理と、位置指令フィルタ18でフィルタ処理を行い、位置指令Pcを算出する。移動平均処理を行うことにより、制御対象は動き始めには徐々に加速し、一定の加速度となり、さらに停止の手前で徐々に減速する制御が行われる。このような位置指令は、位置指令値がS字を描くことから、S字位置指令と呼ばれている。モータ12に取り付けられた位置検出器11の位置検出値Pmをフィードバック値として位置指令Pcの制御誤差、つまり位置偏差Pdifを算出(減算器4)する。そして、速度指令演算部5が位置偏差に基づき比例ゲインKpを乗算し速度指令Vcを出力する。位置検出値Pmを微分器15が微分しモータの速度検出値Vmを出力する。速度指令Vcとモータの速度検出値Vmの偏差を減算器6により速度制御誤差、すなわち速度偏差を求め、これを出力する。この速度偏差と速度ループ比例ゲインPvと速度ループ積分ゲインIvに基づき速度偏差比例演算器7と速度偏差積分演算器8がそれぞれ速度偏差比例成分と速度偏差積分成分を出力し、加算器9が速度偏差比例成分と速度偏差積分成分を加算しトルク指令Tcを出力する。図5中の記号10は、トルク指令をフィルタリングする各種のフィルタ部と電流制御部を示す。ボールネジ14を介して送り軸(テーブル)13を駆動し、その位置を制御する。
【0004】
前記位置指令フィルタ18の伝達関数F(s)を(式1)とする。(式1)でsはラプラス演算子を示す。
F(s)=(s2+ω22)/(s2+2ζ2ω2+ω22)・・・(式1)
ここで、ζ2:フィルタの減衰比
ω2:フィルタの固有角振動数
ζ2、ω2>0
【0005】
この位置指令フィルタ18により、ω2の周波数成分を含まない位置指令が演算される。さらに、ω2を送り軸の固有角振動数がω0とほぼ等しくすれば(ω2≒ω0)、位置指令Pcに含まれる送り軸の固有角振動数が低減される。この結果、送り軸の固有角振動数の加振力が低減され、送り軸の機械振動を抑えることができる。S字位置指令を行う位置制御装置が下記特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−272749号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
図5に示した従来技術において、機械経年変化により送り軸駆動系の剛性が低下した場合や、大型マシニングセンタ等で想定以上の重量ワークをテーブルに乗せた時において、送り軸共振周波数が低くなり、低周波の振動が発生した。また、機械設置のバランスが崩れ、送り軸駆動系とは別の機械全体の固有振動周波数が変化し、加減速時に低周波の振動が発生した。さらに、機械的な故障が発生し、送り軸駆動系の剛性が低下した場合でも気づかずに機械を動作させ、低周波振動によりタックベアリング等の送り軸機構部品損傷を加える場合もあった。
【課題を解決するための手段】
【0008】
本発明に係る位置制御装置は、位置指令に対して移動平均処理を行うことによりS字位置指令を生成し、送り軸の位置制御を行う位置制御装置において、制御対象である送り軸または送り軸を含む系の振動の大きさに応じて移動平均処理における移動平均の段数を変更するものである。移動平均の段数とは、1回の平均値の算出におけるサンプル数をいう。サンプルは、サンプリング周期ごとに取得するので、サンプル数は、移動平均を算出するためのサンプリング期間内の、サンプリング周期数に一致する。
【0009】
制御対象の振動が大きくなった場合、移動平均の段数を増加するようにできる。
【0010】
本発明に係る位置制御装置は、位置指令を生成する位置指令演算部と、生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、S字位置指令に基づきモータを駆動制御するモータ駆動部と、モータの回転位置を検出する位置検出部と、S字位置指令とモータの回転位置とから位置制御誤差を算出する誤差算出部と、位置制御誤差の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、を有するものとできる。
【0011】
モータ駆動部は、S字位置制御指令に基づきフィードバック制御を行うようにできる。フィードバック制御においては、モータの回転位置、すなわちモータのステータに対するロータの回転位置を検出して、位置指令に対してフィードバックを行うようにしてよい。また、位置指令に基づき速度指令を生成する場合、検出されたモータの回転位置を微分し、この微分値を速度指令に対してフィードバックするようにしてもよい。
【0012】
位置制御誤差の変動の振幅を、予め定められた周波数の範囲で監視し、この範囲の振動成分の大きさが予め定められた値よりも大きくなった場合に移動平均の段数を増やすようにできる。
【0013】
移動平均の段数は、徐々に増加するようにでき、制御対象の振動が前記の予め定められた値以下になるまで、増加を続けるようにできる。段数の増加が続き、別の予め定められた値に達すると、これを報知するようにできる。
【0014】
本発明に係る他の位置制御装置は、モータにより送り軸の送り位置を制御する位置制御装置であって、位置指令を生成する位置指令演算部と、生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、S字位置指令に基づき速度指令を生成する速度指令演算部と、速度指令に基づきトルク指令を生成するトルク指令演算部と、トルク指令の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、を有するものとできる。
【0015】
速度指令演算部は、S字位置指令に基づき、フィードバック制御を行ってよい。また、トルク指令演算部は、速度指令に基づき、フィードバック制御を行ってもよい。
【0016】
トルク指令の変動の振幅を、予め定められた周波数の範囲で監視し、この範囲の振動成分の大きさが予め定められた値よりも大きくなった場合に移動平均の段数を増やすようにできる。
【0017】
移動平均の段数は、徐々に増加するようにでき、制御対象の振動が前記の予め定められた値以下になるまで、増加を続けるようにできる。段数の増加が続き、別の予め定められた値に達すると、これを報知するようにできる。
【発明の効果】
【0018】
本発明による位置制御装置によれば、送り軸駆動系の剛性が低下し、固有振動周波数が変化し、振動が発生した場合、S字位置指令を生成する移動平均の段数が変更される。その結果、位置指令Pcに含まれる送り軸の固有振動周波数が低減され、加振力が小さくなり、振動を抑えることができる。
【0019】
さらに、移動平均の段数が大きくなった場合に、その状態を報知するため、機械が大きな損傷に至ることもなくなった。
【図面の簡単な説明】
【0020】
【図1】本発明の実施形態を示すブロック図である。
【図2】本発明の他の実施形態を示すブロック図である。
【図3】本発明の移動平均段数変更器の構成例を示すブロック図である。
【図4】本発明の移動平均段数変更器の他の構成例を示すブロック図である。
【図5】従来技術を示すブロック図である。
【図6】本発明の効果説明図である。
【発明を実施するための形態】
【0021】
本発明の実施形態について説明する。従来例と同一要素には同一符号を付しており説明は省略する。本実施形態の制御ブロック図を図1、2に示す。
【0022】
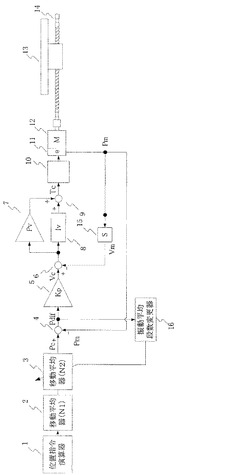
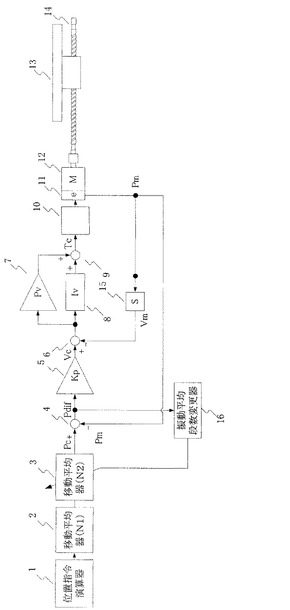
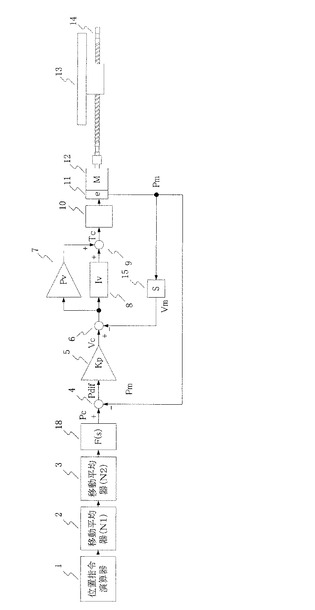
位置指令演算器1より出力された値を、移動平均器2でN1段の移動平均処理と、移動平均器3でN2段の移動平均処理を行い、位置指令Pcを算出する。モータ12に取り付けられた位置検出器11の位置検出値Pmをフィードバック値として位置指令Pcの制御誤差、つまり位置偏差Pdifを算出(減算器4)する。そして、速度指令演算部5が位置偏差に基づき比例ゲインKpを乗算し速度指令Vcを出力する。位置検出値Pmを微分器15が微分しモータの速度検出値Vmを出力する。速度指令Vcとモータの速度検出値Vmの偏差を減算器6により速度制御誤差、すなわち速度偏差を求め、これを出力する。この速度偏差と速度ループ比例ゲインPvと速度ループ積分ゲインIvに基づき速度偏差比例演算器7と速度偏差積分演算器8がそれぞれ速度偏差比例成分と速度偏差積分成分を出力し、加算器9が速度偏差比例成分と速度偏差積分成分を加算しトルク指令Tcを出力する。図1中の記号10は、トルク指令をフィルタリングする各種のフィルタ部と電流制御部を示す。移動平均処理により得られたボールネジ14を介して送り軸(テーブル)13を駆動し、その位置を制御する。移動平均処理により得られたS字位置指令に基づき、符号4〜11で示された構成を有するモータ駆動部が、モータ12を駆動制御する。
【0023】
移動平均段数変更器16は、位置偏差Pdifより、移動平均器3の移動平均段数N2を変更する。または、移動平均段数変更器16は、トルク指令Tcより、移動平均器3の移動平均段数N2を変更する。
【0024】
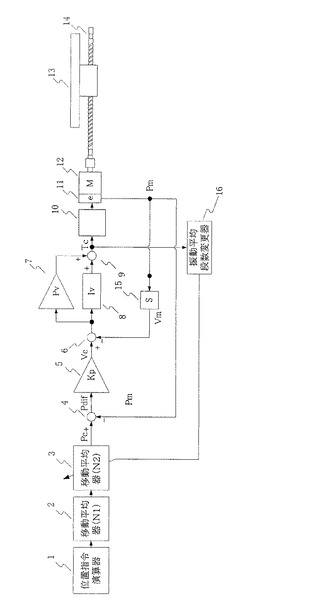
移動平均段数変更器16の具体的な構成例を図3に示す。FFT(高速フーリエ変換)演算器161は、位置偏差Pdifまたはトルク指令Tcから、公知の手法で振動成分のスペクトラム最大値SPmを算出する。スペクトラムを監視する周波数の範囲を予め定めておくことができる。この構成例では、fstからfenの範囲で監視を行う。比較器163は、スペクトラム最大値SPmが予め設定した比較値SPref162を超えた場合に、全加算器165にパルスを出力する。全加算器は初期値N2とし、前記パルスによりΔN2だけ増加したN2’を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
【0025】
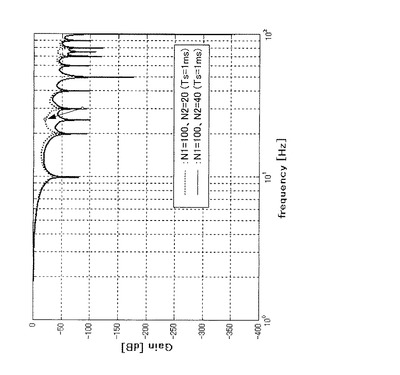
移動平均段数変更器16は、位置偏差Pdifまたはトルク指令Tcの変動が大きくなった場合、特に位置偏差またはトルク指令に含まれる振動成分が大きくなった場合には、全加算器により振動成分が比較値SPref以下となるまで、移動平均段数にΔN2を加算し、順次大きくする。図6に、サンプリング周期1msにおける、N1=100、N2=20の位置指令Pcのゲイン周波数特性を点線で、N1=100、N2=40のゲイン周波数特性を実線で示す。図6に点線で示す特性の系において、経年変化等により制御対象の固有振動周波数が30Hzから25Hzに変化した場合、固有振動数におけるゲインが矢印で示すように増加する。このため、位置指令Pcに含まれる固有振動周波数成分が増加し、加振力が大きくなるため、機械振動が発生する。振動が発生した場合は、全加算器165が、振動成分が予め設定された比較値SPrefより小さくなるまで移動平均段数を大きくする。例えば、N2=40まで増加した場合は、図6からもわかるように、位置指令Pcに含まれる固有振動周波数成分(30Hz)は低減され、加振力が小さくなり、振動を抑えることができる。
【0026】
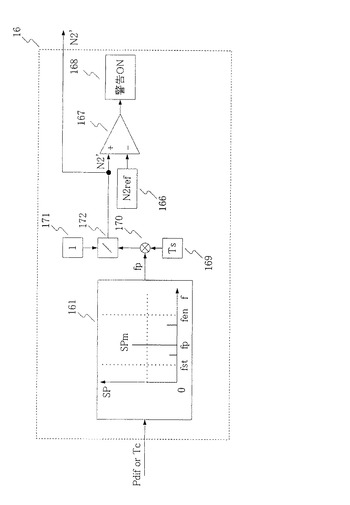
移動平均段数変更器16の他の構成例をブロック図にて図4に示す。FFT処理器161は、位置偏差Pdifまたはトルク指令Tcより、公知のFFTなどの手法により、予め設定された範囲の周波数における振動成分が予め設定されたスペクトラム比較値SPrefを超えた場合に、その振動成分の周波数fpを算出する。除算器172は、(式2)より移動平均段数N2’を、移動平均器3へ出力する。(式2)でTsはサンプリング周期を示す。
N2’=1/(fp×Ts) ・・・(式2)
移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
【0027】
移動平均段数変更器16は、位置偏差Pdifまたはトルク指令Tcに含まれる振動成分が大きくなった場合には、FFT演算器161により振動周波数fpが検出され、(式2)より新たな移動平均段数N2’を算出する。たとえば、固有振動周波数が25Hzに変化し、サンプリング周期1msの場合、移動平均段数変更器は(式2)よりN2’=40を出力する。図6は、サンプリング周期1msにおける、N1=100、N2=40の位置指令Pcのゲイン周波数特性を実線で示しており、位置指令Pcに含まれる25Hz近傍の振動周波数が低減され、加振力が小さくなり、振動を抑えることができる。
【0028】
移動平均段数変更部16は、図3および図4に示すように、振動が大きくなったとき、これを警告する機能を備えることができる。比較器167は、移動平均段数N2’が予め設定された閾値N2refを超えた場合に、機械の状態が異常であることを検出し、報知部168にて、その状態を表示、音声等により報知する。剛性が低下したため振動が発生した場合に、移動平均段数N2’が大きくなるため、警告等を操作者等に伝えることができる。操作者は、この警告に対応して、該当軸を停止させることが可能となり、機械的故障が発生した場合に気づかずに機械を動作させることがなくなり、送り軸機構部品に損傷を加えることもなくなる。
【符号の説明】
【0029】
1 位置指令演算器、4,6 減算器、2,3 移動平均器、5 速度指令演算部、7 速度偏差比例演算器、8 速度偏差積分演算器、9 加算器、10 各種フィルタ部,電流制御部、11 モータ位置検出器、12 モータ、13 テーブル、14 ボールネジ、15 微分器、16 移動平均段数変更器、161 FFT演算器、162、164、166、169、171 係数、163、167 比較器、165 全加算器、170 乗算器、172 除算器、18 位置指令フィルタ。
【技術分野】
【0001】
本発明は、工作機械等における送り軸(テーブル)の位置制御装置に関する。
【背景技術】
【0002】
工作機械の送り軸において、高加減速で動作させ、かつ、機械的振動を抑えるために各種の試みがなされている。加減速時の機械振動を抑えるためには、位置指令に移動平均処理やフィルタを付加し、送り軸の固有振動周波数に相当する指令成分を低減することで、加減速時の加振力が除去できる。その結果、機械振動を抑えた送り軸の制御が可能となる。しかし、経年変化による駆動系部品の磨耗・部品のゆるみ、連続動作時の温度上昇によるボールネジ伸びによるボールネジのテンション低下、機械設置状況(バランス)の変化などが原因により、送り軸機構の固有振動周波数が変化し、前記位置平均処理やフィルタがアンマッチとなり、機械振動が発生してしまう課題がある。
【0003】
図5に機械振動を抑えるための従来技術の制御ブロック図を示す。位置指令演算器1より出力された値を、移動平均器2でN1段の移動平均処理と、移動平均器3でN2段の移動平均処理と、位置指令フィルタ18でフィルタ処理を行い、位置指令Pcを算出する。移動平均処理を行うことにより、制御対象は動き始めには徐々に加速し、一定の加速度となり、さらに停止の手前で徐々に減速する制御が行われる。このような位置指令は、位置指令値がS字を描くことから、S字位置指令と呼ばれている。モータ12に取り付けられた位置検出器11の位置検出値Pmをフィードバック値として位置指令Pcの制御誤差、つまり位置偏差Pdifを算出(減算器4)する。そして、速度指令演算部5が位置偏差に基づき比例ゲインKpを乗算し速度指令Vcを出力する。位置検出値Pmを微分器15が微分しモータの速度検出値Vmを出力する。速度指令Vcとモータの速度検出値Vmの偏差を減算器6により速度制御誤差、すなわち速度偏差を求め、これを出力する。この速度偏差と速度ループ比例ゲインPvと速度ループ積分ゲインIvに基づき速度偏差比例演算器7と速度偏差積分演算器8がそれぞれ速度偏差比例成分と速度偏差積分成分を出力し、加算器9が速度偏差比例成分と速度偏差積分成分を加算しトルク指令Tcを出力する。図5中の記号10は、トルク指令をフィルタリングする各種のフィルタ部と電流制御部を示す。ボールネジ14を介して送り軸(テーブル)13を駆動し、その位置を制御する。
【0004】
前記位置指令フィルタ18の伝達関数F(s)を(式1)とする。(式1)でsはラプラス演算子を示す。
F(s)=(s2+ω22)/(s2+2ζ2ω2+ω22)・・・(式1)
ここで、ζ2:フィルタの減衰比
ω2:フィルタの固有角振動数
ζ2、ω2>0
【0005】
この位置指令フィルタ18により、ω2の周波数成分を含まない位置指令が演算される。さらに、ω2を送り軸の固有角振動数がω0とほぼ等しくすれば(ω2≒ω0)、位置指令Pcに含まれる送り軸の固有角振動数が低減される。この結果、送り軸の固有角振動数の加振力が低減され、送り軸の機械振動を抑えることができる。S字位置指令を行う位置制御装置が下記特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−272749号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
図5に示した従来技術において、機械経年変化により送り軸駆動系の剛性が低下した場合や、大型マシニングセンタ等で想定以上の重量ワークをテーブルに乗せた時において、送り軸共振周波数が低くなり、低周波の振動が発生した。また、機械設置のバランスが崩れ、送り軸駆動系とは別の機械全体の固有振動周波数が変化し、加減速時に低周波の振動が発生した。さらに、機械的な故障が発生し、送り軸駆動系の剛性が低下した場合でも気づかずに機械を動作させ、低周波振動によりタックベアリング等の送り軸機構部品損傷を加える場合もあった。
【課題を解決するための手段】
【0008】
本発明に係る位置制御装置は、位置指令に対して移動平均処理を行うことによりS字位置指令を生成し、送り軸の位置制御を行う位置制御装置において、制御対象である送り軸または送り軸を含む系の振動の大きさに応じて移動平均処理における移動平均の段数を変更するものである。移動平均の段数とは、1回の平均値の算出におけるサンプル数をいう。サンプルは、サンプリング周期ごとに取得するので、サンプル数は、移動平均を算出するためのサンプリング期間内の、サンプリング周期数に一致する。
【0009】
制御対象の振動が大きくなった場合、移動平均の段数を増加するようにできる。
【0010】
本発明に係る位置制御装置は、位置指令を生成する位置指令演算部と、生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、S字位置指令に基づきモータを駆動制御するモータ駆動部と、モータの回転位置を検出する位置検出部と、S字位置指令とモータの回転位置とから位置制御誤差を算出する誤差算出部と、位置制御誤差の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、を有するものとできる。
【0011】
モータ駆動部は、S字位置制御指令に基づきフィードバック制御を行うようにできる。フィードバック制御においては、モータの回転位置、すなわちモータのステータに対するロータの回転位置を検出して、位置指令に対してフィードバックを行うようにしてよい。また、位置指令に基づき速度指令を生成する場合、検出されたモータの回転位置を微分し、この微分値を速度指令に対してフィードバックするようにしてもよい。
【0012】
位置制御誤差の変動の振幅を、予め定められた周波数の範囲で監視し、この範囲の振動成分の大きさが予め定められた値よりも大きくなった場合に移動平均の段数を増やすようにできる。
【0013】
移動平均の段数は、徐々に増加するようにでき、制御対象の振動が前記の予め定められた値以下になるまで、増加を続けるようにできる。段数の増加が続き、別の予め定められた値に達すると、これを報知するようにできる。
【0014】
本発明に係る他の位置制御装置は、モータにより送り軸の送り位置を制御する位置制御装置であって、位置指令を生成する位置指令演算部と、生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、S字位置指令に基づき速度指令を生成する速度指令演算部と、速度指令に基づきトルク指令を生成するトルク指令演算部と、トルク指令の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、を有するものとできる。
【0015】
速度指令演算部は、S字位置指令に基づき、フィードバック制御を行ってよい。また、トルク指令演算部は、速度指令に基づき、フィードバック制御を行ってもよい。
【0016】
トルク指令の変動の振幅を、予め定められた周波数の範囲で監視し、この範囲の振動成分の大きさが予め定められた値よりも大きくなった場合に移動平均の段数を増やすようにできる。
【0017】
移動平均の段数は、徐々に増加するようにでき、制御対象の振動が前記の予め定められた値以下になるまで、増加を続けるようにできる。段数の増加が続き、別の予め定められた値に達すると、これを報知するようにできる。
【発明の効果】
【0018】
本発明による位置制御装置によれば、送り軸駆動系の剛性が低下し、固有振動周波数が変化し、振動が発生した場合、S字位置指令を生成する移動平均の段数が変更される。その結果、位置指令Pcに含まれる送り軸の固有振動周波数が低減され、加振力が小さくなり、振動を抑えることができる。
【0019】
さらに、移動平均の段数が大きくなった場合に、その状態を報知するため、機械が大きな損傷に至ることもなくなった。
【図面の簡単な説明】
【0020】
【図1】本発明の実施形態を示すブロック図である。
【図2】本発明の他の実施形態を示すブロック図である。
【図3】本発明の移動平均段数変更器の構成例を示すブロック図である。
【図4】本発明の移動平均段数変更器の他の構成例を示すブロック図である。
【図5】従来技術を示すブロック図である。
【図6】本発明の効果説明図である。
【発明を実施するための形態】
【0021】
本発明の実施形態について説明する。従来例と同一要素には同一符号を付しており説明は省略する。本実施形態の制御ブロック図を図1、2に示す。
【0022】
位置指令演算器1より出力された値を、移動平均器2でN1段の移動平均処理と、移動平均器3でN2段の移動平均処理を行い、位置指令Pcを算出する。モータ12に取り付けられた位置検出器11の位置検出値Pmをフィードバック値として位置指令Pcの制御誤差、つまり位置偏差Pdifを算出(減算器4)する。そして、速度指令演算部5が位置偏差に基づき比例ゲインKpを乗算し速度指令Vcを出力する。位置検出値Pmを微分器15が微分しモータの速度検出値Vmを出力する。速度指令Vcとモータの速度検出値Vmの偏差を減算器6により速度制御誤差、すなわち速度偏差を求め、これを出力する。この速度偏差と速度ループ比例ゲインPvと速度ループ積分ゲインIvに基づき速度偏差比例演算器7と速度偏差積分演算器8がそれぞれ速度偏差比例成分と速度偏差積分成分を出力し、加算器9が速度偏差比例成分と速度偏差積分成分を加算しトルク指令Tcを出力する。図1中の記号10は、トルク指令をフィルタリングする各種のフィルタ部と電流制御部を示す。移動平均処理により得られたボールネジ14を介して送り軸(テーブル)13を駆動し、その位置を制御する。移動平均処理により得られたS字位置指令に基づき、符号4〜11で示された構成を有するモータ駆動部が、モータ12を駆動制御する。
【0023】
移動平均段数変更器16は、位置偏差Pdifより、移動平均器3の移動平均段数N2を変更する。または、移動平均段数変更器16は、トルク指令Tcより、移動平均器3の移動平均段数N2を変更する。
【0024】
移動平均段数変更器16の具体的な構成例を図3に示す。FFT(高速フーリエ変換)演算器161は、位置偏差Pdifまたはトルク指令Tcから、公知の手法で振動成分のスペクトラム最大値SPmを算出する。スペクトラムを監視する周波数の範囲を予め定めておくことができる。この構成例では、fstからfenの範囲で監視を行う。比較器163は、スペクトラム最大値SPmが予め設定した比較値SPref162を超えた場合に、全加算器165にパルスを出力する。全加算器は初期値N2とし、前記パルスによりΔN2だけ増加したN2’を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
【0025】
移動平均段数変更器16は、位置偏差Pdifまたはトルク指令Tcの変動が大きくなった場合、特に位置偏差またはトルク指令に含まれる振動成分が大きくなった場合には、全加算器により振動成分が比較値SPref以下となるまで、移動平均段数にΔN2を加算し、順次大きくする。図6に、サンプリング周期1msにおける、N1=100、N2=20の位置指令Pcのゲイン周波数特性を点線で、N1=100、N2=40のゲイン周波数特性を実線で示す。図6に点線で示す特性の系において、経年変化等により制御対象の固有振動周波数が30Hzから25Hzに変化した場合、固有振動数におけるゲインが矢印で示すように増加する。このため、位置指令Pcに含まれる固有振動周波数成分が増加し、加振力が大きくなるため、機械振動が発生する。振動が発生した場合は、全加算器165が、振動成分が予め設定された比較値SPrefより小さくなるまで移動平均段数を大きくする。例えば、N2=40まで増加した場合は、図6からもわかるように、位置指令Pcに含まれる固有振動周波数成分(30Hz)は低減され、加振力が小さくなり、振動を抑えることができる。
【0026】
移動平均段数変更器16の他の構成例をブロック図にて図4に示す。FFT処理器161は、位置偏差Pdifまたはトルク指令Tcより、公知のFFTなどの手法により、予め設定された範囲の周波数における振動成分が予め設定されたスペクトラム比較値SPrefを超えた場合に、その振動成分の周波数fpを算出する。除算器172は、(式2)より移動平均段数N2’を、移動平均器3へ出力する。(式2)でTsはサンプリング周期を示す。
N2’=1/(fp×Ts) ・・・(式2)
移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
【0027】
移動平均段数変更器16は、位置偏差Pdifまたはトルク指令Tcに含まれる振動成分が大きくなった場合には、FFT演算器161により振動周波数fpが検出され、(式2)より新たな移動平均段数N2’を算出する。たとえば、固有振動周波数が25Hzに変化し、サンプリング周期1msの場合、移動平均段数変更器は(式2)よりN2’=40を出力する。図6は、サンプリング周期1msにおける、N1=100、N2=40の位置指令Pcのゲイン周波数特性を実線で示しており、位置指令Pcに含まれる25Hz近傍の振動周波数が低減され、加振力が小さくなり、振動を抑えることができる。
【0028】
移動平均段数変更部16は、図3および図4に示すように、振動が大きくなったとき、これを警告する機能を備えることができる。比較器167は、移動平均段数N2’が予め設定された閾値N2refを超えた場合に、機械の状態が異常であることを検出し、報知部168にて、その状態を表示、音声等により報知する。剛性が低下したため振動が発生した場合に、移動平均段数N2’が大きくなるため、警告等を操作者等に伝えることができる。操作者は、この警告に対応して、該当軸を停止させることが可能となり、機械的故障が発生した場合に気づかずに機械を動作させることがなくなり、送り軸機構部品に損傷を加えることもなくなる。
【符号の説明】
【0029】
1 位置指令演算器、4,6 減算器、2,3 移動平均器、5 速度指令演算部、7 速度偏差比例演算器、8 速度偏差積分演算器、9 加算器、10 各種フィルタ部,電流制御部、11 モータ位置検出器、12 モータ、13 テーブル、14 ボールネジ、15 微分器、16 移動平均段数変更器、161 FFT演算器、162、164、166、169、171 係数、163、167 比較器、165 全加算器、170 乗算器、172 除算器、18 位置指令フィルタ。
【特許請求の範囲】
【請求項1】
モータにより送り軸の送り位置を制御する位置制御装置であって、
位置指令を生成する位置指令演算部と、
生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、
S字位置指令に基づきモータを駆動制御するモータ駆動部と、
モータの回転位置を検出する位置検出部と、
S字位置指令とモータの回転位置とから位置制御誤差を算出する誤差算出部と、
位置制御誤差の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、
を有する位置制御装置。
【請求項2】
モータにより送り軸の送り位置を制御する位置制御装置であって、
位置指令を生成する位置指令演算部と、
生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、
S字位置指令に基づき速度指令を生成する速度指令演算部と、
速度指令に基づきトルク指令を生成するトルク指令演算部と、
トルク指令の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、
を有する位置制御装置。
【請求項3】
移動平均段数変更部は、移動平均の段数を徐々に変更するものであり、
さらに、前記移動平均器の段数が予め設定された閾値より大きくなった場合に、これを報知する報知部を有する請求項1または2に記載の位置制御装置。
【請求項1】
モータにより送り軸の送り位置を制御する位置制御装置であって、
位置指令を生成する位置指令演算部と、
生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、
S字位置指令に基づきモータを駆動制御するモータ駆動部と、
モータの回転位置を検出する位置検出部と、
S字位置指令とモータの回転位置とから位置制御誤差を算出する誤差算出部と、
位置制御誤差の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、
を有する位置制御装置。
【請求項2】
モータにより送り軸の送り位置を制御する位置制御装置であって、
位置指令を生成する位置指令演算部と、
生成された位置指令に対し移動平均処理を行うことによりS字位置指令を生成する移動平均部と、
S字位置指令に基づき速度指令を生成する速度指令演算部と、
速度指令に基づきトルク指令を生成するトルク指令演算部と、
トルク指令の変動の振幅に基づき、前記移動平均処理における移動平均の段数を変更する移動平均段数変更部と、
を有する位置制御装置。
【請求項3】
移動平均段数変更部は、移動平均の段数を徐々に変更するものであり、
さらに、前記移動平均器の段数が予め設定された閾値より大きくなった場合に、これを報知する報知部を有する請求項1または2に記載の位置制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−97756(P2013−97756A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−243045(P2011−243045)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000149066)オークマ株式会社 (476)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000149066)オークマ株式会社 (476)
【Fターム(参考)】
[ Back to top ]