
位置変動検出装置、これを含むシステム、及び位置変動検出装置の動作方法
【課題】ユーザーの運動状態を簡易に計測することが強く望まれている。
【解決手段】計測ユニット20は、複数のリンク及び検出部11〜14を含む歩行補助装置10をユーザーの脚に対して装着し、歩行補助装置10の検出装置から供給される検出値に基づいてユーザーの腰位置の変動を検出する。計測ユニット20に含まれる算出部22は、検出装置からの検出値(検出値は、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における腰位置を算出する。算出部22は、検出装置からの検出値(検出値は、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて所定方向に沿うリンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。
【解決手段】計測ユニット20は、複数のリンク及び検出部11〜14を含む歩行補助装置10をユーザーの脚に対して装着し、歩行補助装置10の検出装置から供給される検出値に基づいてユーザーの腰位置の変動を検出する。計測ユニット20に含まれる算出部22は、検出装置からの検出値(検出値は、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における腰位置を算出する。算出部22は、検出装置からの検出値(検出値は、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて所定方向に沿うリンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置変動検出装置、これを含むシステム、及び位置変動検出装置の動作方法に関する。
【背景技術】
【0002】
脳卒中等によって片脚麻痺となった患者は、その身体機能の回復のため、歩行運動等の反復が要求される場合がある。患者の身体機能の回復を早めるため、リハビリ指導者は、患者の現状/改善具合を見て、自己の経験則を踏まえて、患者に対して適切なアドバイスをする。リハビリ指導者による患者へのアドバイスは、リハビリ指導者の個人的経験則に基づくものが多く、リハビリ指導者の能力等に依存する程度が大きい。
【0003】
特許文献1には、歩行感覚生成装置が開示されている。特許文献1の図1に示すように、歩行感覚生成装置は、ベルト機構1を有し、歩行者は、当該ベルト機構1上を歩行する。ベルト機構1は、3軸歩行面保持機構3上に設置されており、任意の傾斜角度に調整される。歩行者の脚先位置はCCDカメラ4で検出され、腰部位置は糸式位置センサ5で検出され、頭部位置は磁気式位置姿勢計測装置6で検出され、各検出値は、計算機20に入力される。歩行者の前方には、大型スクリーン7が設けられており、歩行動作にあわせた空間の映像が提示される。
【0004】
特許文献2には、ユーザーの第1脚に対して装具を付け、装具が装着されていない第2脚の位置を計測する装置が開示されている。特許文献2の図1に示すように、脚装置12には、第2脚を撮像するカメラ42が設けられている。コントローラ32は、カメラ42が撮像した画像に基づいてカメラ位置に対する第2脚の位置を演算する。コントローラ32による演算処理により、第1脚の足位置に対する第2脚の足の相対位置が算出される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2923493号
【特許文献2】特開2010−259469号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
患者の早期回復に繋がる効果的なリハビリを提供するためには、患者の現在の運動状態(歩行状態等)を的確に把握することが望ましい。現状、患者の運動を時分割して画像取得して解析することで患者の運動状態を計測する手法が提供されている。また、床、マット等の構造物に圧力センサを埋め込んで患者の運動状態を計測する手法が提供されている。しかしながら、このような場合には、比較的大型な装置が必要となる場合が多く、患者の運動状態を簡易に計測することはできない場合が多い。
【0007】
上述の説明から明らかなように、ユーザーの運動状態を簡易に計測することが強く望まれている。
【課題を解決するための手段】
【0008】
本発明に係る位置変動検出装置は、複数のリンク、及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置であって、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。この構成を採用することによって、ユーザーの運動状態を簡易に計測することが可能になる。
【0009】
前記所定方向における前記所定部位の位置を算出する第1位置算出部と、前記ユーザーの前記脚が接地しているか否かを示す情報に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、を備える、と良い。
【0010】
前記検出値は、前記ユーザーの前記脚が接地しているか否かを示す値を更に含む、上記いずれかの位置変動検出装置であって、前記所定方向における前記所定部位の位置を算出する第1位置算出部と、前記検出装置から供給される前記検出値に基づいて、前記ユーザーの前記脚が接地しているか否かを判定する判定部と、前記判定部による判定結果に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、を備える、と良い。
【0011】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える、上記いずれかに記載の位置変動検出装置であって、前記第1位置算出部は、前記所定部位を中心として前記リンクが回転する際に検出される角加速度と、前記リンクの変位に応じて前記検出装置が検出する加速度とに基づいて前記リンクの前記加速度を算出し、当該算出した加速度を積分する、と良い。
【0012】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかに記載の位置変動検出装置であって、前記第1位置算出部は、前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する、と良い。
【0013】
前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかの位置変動検出装置であって、前記第1位置算出部による前記所定部位の鉛直軸線に沿う高さの算出処理と、前記第1位置算出部による所定方向に沿う前記リンクの前記加速度の算出処理とは時間的に並列して実行される、と良い。
【0014】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかの位置変動検出装置であって、前記第1位置算出部は、複数の前記リンクの各長さに応じた複数の設定値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の前記鉛直軸線に沿う高さを算出する、と良い。
【0015】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかに記載の位置変動検出装置であって、前記第1位置算出部は、複数の前記リンクの各長さを示す複数のリンク長値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の鉛直軸線に沿う高さを算出し、当該高さと鉛直方向に対して前記リンクが為す角度とに基づいて前記所定方向における前記所定部位の位置を算出する、と良い。
【0016】
前記治具は、ユーザーの脚の膝に対してトルクを与えることでユーザーの歩行を補助する歩行補助装置である、と良い。複数の前記リンクは、前記ユーザーの大腿骨に対応づけて配置された第1リンクと、前記ユーザーの脛骨に対応づけて配置された第2リンクとを含む、と良い。前記所定位置は、前記ユーザーの腰位置である、と良い。
【0017】
本発明に係る位置変動検出システムは、複数のリンク、及び検出装置を含むと共に、ユーザーの脚に対して装着される治具と、前記治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置と、を備える位置変動検出システムであって、前記位置変動検出装置は、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。
【0018】
本発明に係る位置変動検出装置の動作方法は、複数のリンク及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置の動作方法であって、 前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。
【発明の効果】
【0019】
本発明によれば、ユーザーの運動状態を簡易に計測することできる。
【図面の簡単な説明】
【0020】
【図1】実施の形態1にかかる腰位置計測システムの概略的な模式図である。
【図2】実施の形態1にかかる歩行補助装置の構成及びユーザーに対するその装着状態を示す模式図である。
【図3】実施の形態1にかかるリンク同士が為すリンク角度を示す図である。
【図4】実施の形態1にかかる歩行補助装置の構成を示す概略的なブロック図である。
【図5】実施の形態1にかかる腰位置計測システムの構成を示す概略的なブロック図である。
【図6】実施の形態1にかかる腰位置計測システムの動作を示すタイミングチャートである。
【図7】実施の形態1にかかる腰位置の変動を示す模式図である。
【図8】実施の形態1にかかる立脚時の腰位置を算出する手順を示す図である。
【図9】実施の形態1にかかる遊脚時の腰位置を算出する手順を示す図である。
【図10】実施の形態1にかかる腰位置計測システムの動作を示す概略的なフローチャートである。
【図11】実施の形態2にかかる腰位置計測システムの動作を示すタイミングチャートである。
【図12】実施の形態3にかかる腰位置計測システムを説明するための図である。
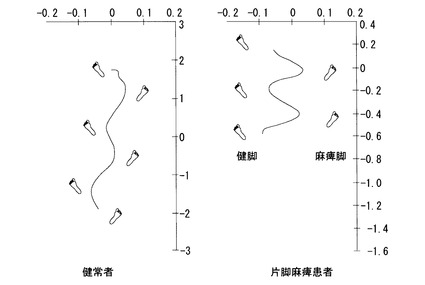
【図13】健常者と片脚麻痺患者の歩行状態の相違を示す図である。
【発明を実施するための形態】
【0021】
実施の形態1
本実施形態に係る位置変動検出装置は、複数のリンク及び検出装置を含む治具を患者の脚に対して装着し、治具の検出装置から供給される検出値に基づいて患者の腰位置の位置変動を検出する。位置変動検出装置は、検出装置から供給される検出値に基づいて鉛直軸線に対して交差する所定方向における腰位置を算出し、検出装置から供給される検出値に基づいて所定方向に沿うリンクの加速度を算出し、この加速度の積分に基づいて所定方向における腰位置を算出する。
【0022】
この構成によれば、異なる内容の算出処理に基づいて、立脚及び遊脚時の腰位置が夫々算出され、患者の腰位置の変動を簡易に計測することが可能になる。特に、加速度を活用した演算処理に基づいて、遊脚時の腰位置を算出することで、連続した腰位置の変位を観察することが可能となる。複数のリンク及び検出装置を含む治具として、例えば、歩行補助装置を活用することによって、既存の装置を流用した態様にて、腰位置の変位を検出することが可能となる。
【0023】
図13に示すように、健常者と比べて、片麻痺患者は、横揺れした状態で歩行する。従って、片麻痺患者の歩行に伴うその腰位置の変動を観察することで、片麻痺患者の歩行状態の改善度合いを測ることができる。なお、図13の左側は、健常者の歩行に伴って変位するその腰位置の軌跡を示し、図13の右側は、片麻痺患者の歩行に伴って変位するその腰位置の軌跡を示す。
【0024】
上述の構成によれば、患者のリハビリ時に患者の腰位置の変動を指導者又は患者に提示することが可能となる。従って、より効果的なリハビリ運動を達成することが可能になる。例えば、指導者は、ディスプレイに表示される腰位置の変動状態を勘案して、適切なアドバイスを患者に対してリアルタイム的に提示することができる。
【0025】
以下、図面を参照して本発明の実施の形態について具体的に説明する。図1は、腰位置計測システムの概略的な模式図である。図2は、歩行補助装置の構成及び患者に対するその装着状態を示す模式図である。図3は、リンク同士が為すリンク角度を示す図である。図4は、歩行補助装置の構成を示す概略的なブロック図である。図5は、腰位置計測システムの構成を示す概略的なブロック図である。図6は、腰位置計測システムの動作を示すタイミングチャートである。図7は、腰位置の変動を示す模式図である。図8は、立脚時の腰位置を算出する手順を示す図である。図9は、遊脚時の腰位置を算出する手順を示す図である。図10は、腰位置計測システムの動作を示す概略的なフローチャートである。
【0026】
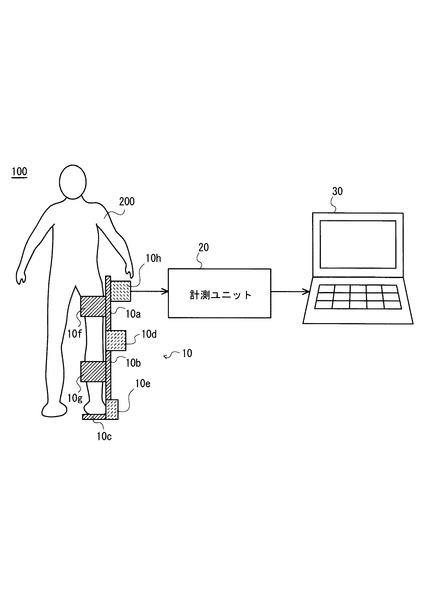
図1に示すように、腰位置計測システム100は、歩行補助装置(治具)10、計測ユニット20、及びコンピュータ30を有する。歩行補助装置10の出力は、計測ユニット20に接続する。計測ユニット20の出力は、コンピュータ30に入力する。なお、計測ユニット20の機能をコンピュータ30に対して組み込んでも良く、その逆も然りである。すなわち、システム100の具体的な構成は任意であり、当業者をすれば、適宜変更可能である。位置変動検出装置は、計測ユニット20単体又は、計測ユニット20とコンピュータ30との組み合わせによって構成される。
【0027】
図1に示す腰位置計測システム100は、図1を正面視して右脚が麻痺している患者200の腰位置の変動を計測する。コンピュータ30の表示画面には、患者200の歩行に応じた患者200の腰位置の変動が同時的に表示される。患者200のリハビリ指導者は、患者200の現状の歩行動作を勘案して適切なアドバイスを患者200に対して提示することができる。患者200のリハビリ運動と指導者によるアドバイス間に大きなタイムラグが存在しないため、指導者のアドバイスを受けて、患者200は、現姿勢等の修正を直ちに行うことができる。また、患者200の腰位置データを保存等しておくことで、例えば、経時的な患者200歩行状態の推移も観察することが可能になる。例えば、週単位又は月単位での患者200の歩行状態の推移を観察することが可能になる。
【0028】
図1及び図2に示すように、歩行補助装置(治具)10は、患者200の腰部からその脚部に至る範囲で患者200の脚に沿って装着される装着型治具/装着型ロボットである。歩行補助装置10は、患者200の麻痺脚の関節に対してトルクを与え、患者200の麻痺脚の歩行運動を補助するように構成されている。歩行補助装置10は、計測ユニット20に対して各種センシング結果を供給し、これにより、患者200の腰位置が計測ユニット20により算出される。計測ユニット20で算出された腰位置は、コンピュータ30の表示画面に表示され、腰位置の変動状態がリハビリ指導者に提示される。患者200の歩行状態の評価時、患者200の腰位置は重要な指標となる。従って、患者200の歩行運動と患者200の腰位置の変動状態を同時的に把握することで、リハビリ指導者は患者200に対して適切なアドバイスを提示することができ、これを受けて、患者200は、現状の歩行状態を修正することができる。
【0029】
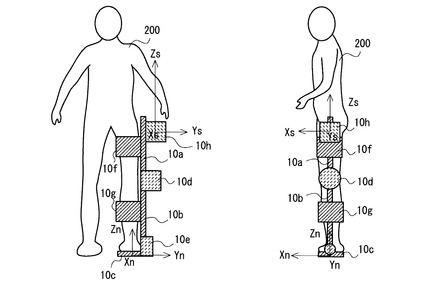
図1及び図2に示すように、歩行補助装置10は、リンク(軸部材)10a、リンク10b、フット部(足台部)10c、ジョイント部(連結中継部)10d、ジョイント部10e、ベルト(取り付け部)10f、ベルト(取り付け部)10g、およびコントローラ部(制御部)10hを有する。リンク10a、10bのリンク長は、患者200の脚長さに応じて適当に調整可能である。
【0030】
リンク10aは、ベルト10fによって、患者200の大腿骨に対応づけて患者200の脚に対して位置固定される。リンク10bは、ベルト10gによって、患者200の脛骨に対応づけて患者200の脚に対して位置固定される。ジョイント部10dは、リンク10aとリンク10bとの接続部分を構成し、患者200の脚の膝位置に対応づけて配置される。フット部10c上には、患者200の足が載せられる。ジョイント部10eは、リンク10bとフット部10cとの接続部分を構成し、患者200の足首位置に対応づけて配置される。コントローラ部10hは、患者200の腰位置に対応づけて配置される。
【0031】
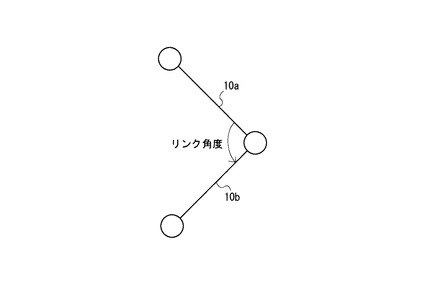
ジョイント部10dは、図3に模式的に示すリンク10aとリンク10bとが為すリンク角度を計測する計測器(例えば、アブソリュートエンコーダ等)を内蔵する。ジョイント部10dは、更に、リンク10aとリンク10b間の同リンク角度を調整する駆動装置(例えば、電気モータ等)を内蔵する。コントローラ部10hは、マイコン(Microcomputer)及び各種センサ類(ジャイロセンサ、加速度センサ等)を内蔵する。フット部10cには、患者200の麻痺脚が接地しているか否かを検知する検出器(例えば、圧力センサ等)が設けられている。ジョイント部10eには、モータ等の駆動装置は内蔵されず、フット部10cは、リンク10bに対して揺動自在に連結している。
【0032】
歩行補助装置10は、ジョイント部10dに設けられた駆動装置を所定態様にて駆動することによって、リンク10aとリンク10bとが為すリンク角度(図3参照)を適当に調整し、これにより患者200の麻痺脚の歩行運動を補助する。
【0033】
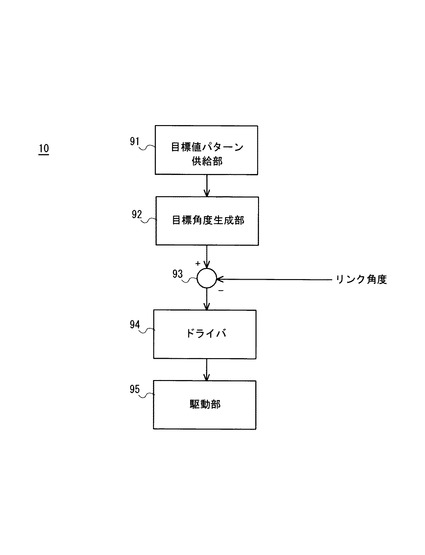
歩行補助装置10は、例えば、図4に示すように構成される。図4に示すように、歩行補助装置10は、目標値パターン供給部91、目標角度生成部92、加算部93、ドライバ94、及びモータ95を含む。
【0034】
目標値パターン供給部91は、患者200の歩行状態を勘案して予め作成された目標値パターンを保持し、これを目標角度生成部92に対して供給する。目標角度生成部92は、目標値パターン供給部91から供給された目標値パターンに基づいて、現時点における目標角度を生成し、これを加算部93に供給する。
【0035】
加算部93は、目標角度生成部92から供給される目標角度からジョイント部10dに設けられた計測装置から供給されるリンク角度を減算し、この算出値をドライバ94に供給する。ドライバ94は、加算部93からの供給値に基づいてモータ95を制御する制御信号を生成し、これをモータ95に供給する。
【0036】
モータ95は、ドライバ94から供給される制御信号に応じて軸回転動作する。モータ95で生じる軸回転力は、リンク機構に対して伝達する。このようにして、リンク10aとリンク10b間のリンク角度が、患者200の麻痺脚の歩行パターンに応じて適当に調整される。
【0037】
なお、図4に示す機能ブロックは、コントローラ部10hに内蔵されたマイコンがジョイント部10dに内蔵された電気モータを駆動することによって実現されるものである。コントローラ部10hの内蔵マイコンは、プログラムを順次実行し、目標角度と現リンク角度とに応じた駆動信号をドライバ94に対して供給する。このようにモータ95をソフトウェア制御することが望ましい。
【0038】
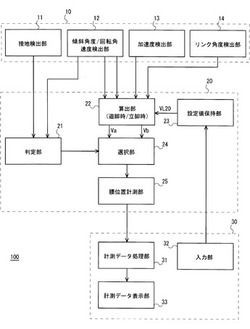
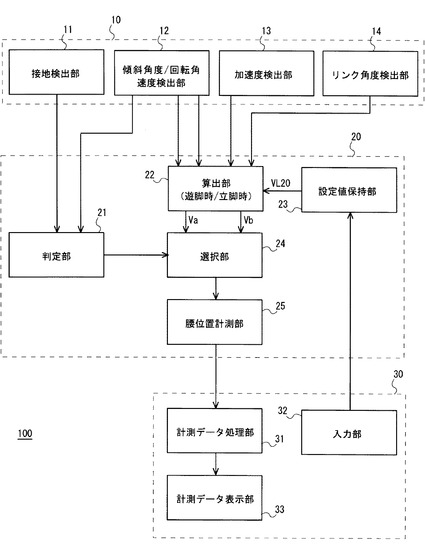
図5を参照して、腰位置計測システム100の構成列について説明する。図5に示すように、歩行補助装置10は、接地検出部11、傾斜角度/回転角速度検出部(以下、傾斜角度検出部又は回転角速度検出部と呼ぶ場合がある)12、加速度検出部13、リンク角度検出部14を含む。説明の便宜上、各機能部11〜14を単に検出部(検出装置)と呼ぶ場合がある。計測ユニット20は、判定部21、算出部(第1位置算出部)22、設定値保持部23、選択部24、および腰位置計測部(第2位置算出部)25を含む。コンピュータは、計測データ処理部31、入力部32、および計測データ表示部33を含む。
【0039】
図5に示す各機能ブロックの接続関係は、次のとおりである。判定部21には、検出部11、検出部12の各出力が接続される。算出部22には、検出部12〜14の各出力が接続される。設定値保持部23の出力は、算出部22に接続される。選択部24には、判定部21及び算出部22の各出力が接続される。選択部24の出力は、腰位置計測部25に接続される。腰位置計測部25の出力は、計測データ処理部31に接続される。計測データ処理部31の出力は、計測データ表示部33に接続される。入力部32の出力は、設定値保持部23に接続される。なお、図5に示す接続関係は、あくまで例示的なものであり、不図示の接続関係が存在する場合もある。
【0040】
図5に示す歩行補助装置10は、検出部11〜14を含む。検出部11は、患者200の麻痺脚が接地していることを検出する。接地検出部11は、例えば、患者200の麻痺脚が接地している時、Hレベル信号を出力し、患者200の麻痺脚が接地していない時、Lレベル信号を出力する。検出部11は、フット部10cに設けられた圧力センサ等から構成される。
【0041】
検出部12は、任意の種類のジャイロセンサから構成され、回転角速度と傾斜角度(図8に示す角度γ、α等)とを検出する。なお、傾斜角度αは、患者200の歩行方向(X軸方向)を側面視して、鉛直方向(Z軸方向)に対してリンク10aの長手方向が為す角度である。傾斜角度αは、患者200の歩行方向(X軸方向)から見て、鉛直方向(Z軸方向)に対してリンク10aの長手方向が為す角度である。検出部12は、歩行補助装置10のコントローラ部10hに内蔵される。
【0042】
検出部13は、任意の種類の加速度センサから構成され、3軸方向の加速度を検出する。検出部12と同様、検出部13は、歩行補助装置10のコントローラ部10hに内蔵される。なお、起立状態の患者の脚に対して所望のように歩行補助装置10が取り付けられているのとき、検出部13により検出される加速度の一つは、鉛直方向の加速となる。
【0043】
検出部14は、ジョイント部10dに内蔵されたエンコーダ等から構成され、リンク角を示す値をコントローラ部10h内のマイコンへ供給する。
【0044】
図5に示す計測ユニット20は、マイコンを内蔵し、判定部21〜腰位置計測部25の各処理を実行する。マイコンによるプログラムの実行によって、歩行補助装置10の検出部から供給される検出値が処理され、最終的に、グローバル座標(図7に示すXg、Yg座標系)における患者200の腰位置が算出される。
【0045】
判定部21は、検出部11、12の各出力に基づいて、患者200の麻痺脚が接地しているか否かを判定する。判定部21は、検出部11からHレベル信号が入力し、かつ検出部12から供給されるYs方向の加速度が零(又は所定閾値以下)のとき、患者200の麻痺脚が接地していると判定し、これを示すHレベル信号を出力する。2つの条件のうち一方が不足する場合、判定部21は、患者200の麻痺脚が接地していないと判定し、これを示すLレベル信号を出力する。なお、判定部21は、その判定精度を効果的に高めるべく、Ys方向の加速度も参照して、接地状態を判定している(図13参照)。
【0046】
算出部22は、検出部12〜14から供給される検出値に基づいて患者200の腰位置を算出する。設定値保持部23は、算出部22による算出処理に用いられる設定値(図8に示すリンク長L1、L2、図9に示す間隔L4等)を保持する。選択部24は、判定部21の出力に応じて、算出部22からの2つの出力(腰位置データVa、腰位置データVb)の一方を選択する。腰位置計測部25は、選択部24を介して供給される腰位置の座標をグローバル座標に変換して出力する。
【0047】
図5に示すコンピュータ30は、CPU(Central Processing Unit)、メモリ、ハードディスク等を具備する一般的な計算機であり、アプリケーションの実行により、計測ユニット20から供給されるデータに応じた表示画像を生成し、これを表示パネル等の表示部に表示する。コンピュータ30は、計測ユニット20に設けられた設定値保持部23の保持値の変更を計測ユニット20に対して指示する。
【0048】
計測データ処理部31は、腰位置計測部25からの供給値を処理し、表示データを生成する。計測データ表示部33は、計測データ処理部31から供給される表示データに応じた表示をする。入力部32は、キーボード等の入力装置を含み、設定値保持部23の保持値の変更を指示する。これに応じて、設定値保持部23は、自身の保持値を、入力部32からの供給値に書き換える。
【0049】
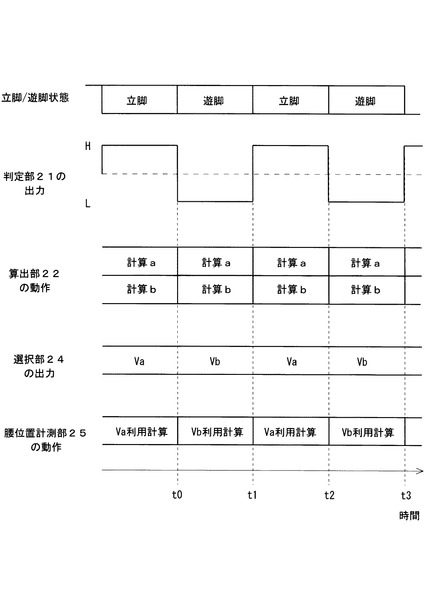
図6に模式的に示すように、患者200が歩行運動するとき、時間経過に伴って、立脚と遊脚とを繰り返す。立脚時、麻痺脚が接地しており、他方の健常脚は地面から離れた状態で前方に押し出される。遊脚時、健常脚が接地しており、他方の麻痺脚が地面から離れた状態で前方に押し出される。
【0050】
図6に模式的に示すように、判定部21の出力は、患者200の歩行状態(立脚/遊脚)に応じてH−Lレベル間を変動する。算出部22は、立脚時腰位置計算aと遊脚時腰位置計算bとを時間的に並列して連続的に実行する。選択部24は、判定部21の出力に応じて、算出部22の出力のいずれかを選択する。腰位置計測部25は、選択部24を介して連続的に供給される算出部22の算出値に基づいて、腰位置の相対変位を時間的に連続して算出する。
【0051】
例えば、時刻t0〜t1間は、遊脚状態にあり、判定部21の出力はLレベルにある。このとき、選択部24は、遊脚時腰位置計算bによる算出値Vbを選択出力する。腰位置計測部25は、順次入力する算出値Vbに基づいて腰位置の相対変位を順次算出する。
【0052】
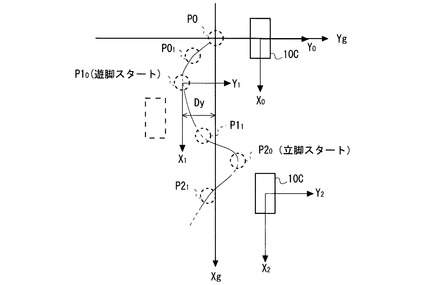
図7に模式的に示すように、患者200の歩行運動に応じて、腰位置P0は、軸Xg及び軸Ygから規定されるグローバル座標系内を移動する。なお、軸Xgは、患者200の進行方向に一致する。軸Ygは、軸Xg及び鉛直軸線に対して直行する軸線であり、患者200の胴幅方向に対応する。グローバル座標系の原点は、例えば、麻痺脚が最初の一歩を踏み出して接地した時の腰位置に設定される。グローバル座標系の原点の設定方法は任意であり、これに限られるべきものではない。
【0053】
図7に示す腰位置P0は、例えば、所定の時間間隔で計測される。腰位置P0は、初期位置であり、本位置は、グローバル座標系における原点となる。腰位置P10は、麻痺脚が地面から離れた時の腰位置である。腰位置P11は、遊脚中の腰位置である。腰位置P20は、麻痺脚が接地した時の腰位置である。腰位置P21は、立脚中の腰位置である。
【0054】
図7に示すように、患者200の現在位置に対応して、軸Xmと軸Ym(mは、任意の自然数とする)から規定されるローカル座標系が定義されている。軸Xmは、グローバル座標系の軸Xgに対して平行な軸線である。軸Ymは、グローバル座標系の軸Ymに対して平行な軸線である。ローカル座標系は、患者200の腰位置、より正確には、歩行補助装置10のコントローラ部10hに対して設定された座標系である。ローカル座標系は、患者200の歩行に応じて、グローバル座標系内を移動するものと理解できる。
【0055】
上述のように、算出部22は、検出部11〜14の検出値に基づいて患者200の腰位置を算出する。この点について、図8及び図9を参照して詳細説明する。なお、図8は、立脚時の腰位置の算出原理を示す図である。図9は、遊脚時の腰位置の算出原理を示す図である。
【0056】
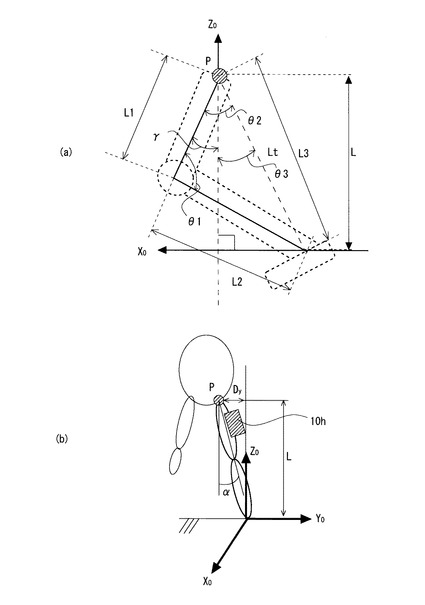
図8から理解されるように、算出部22は、幾何計算に基づいて腰位置Dyを算出する。腰位置Dyは、ローカル軸Ym及びグローバル軸Yg方向における腰位置を示す。より具体的には、算出部22は、リンク長L1、L2、リンク角度θ1、傾斜角γに基づいて高さLを算出し、その後、算出した高さL、傾斜角αに基づいて腰位置Dyを算出する。
【0057】
リンク長L1、L2は、設定値保持部23から算出部22に供給される。リンク角度θ1は、リンク角度検出部14から算出部22に供給される。傾斜角γ、αは、傾斜角度検出部12から算出部22に供給される。
【0058】
算出部22により実行される計算式を示す。なお、次の示す式(1)〜(6)のうち、式(1)〜式(5)は、図8(a)に示されており、式(6)は、図8(b)に示されている。
【0059】
算出部22は、第1式に基づいて、リンク10aとリンク10bに2辺とする三角形のその余の辺(以下、余辺と呼ぶ場合がある)の長さを算出する。算出部22は、第2式を展開して得られる第3式に基づいて、リンク10aと余辺とが為す角度θ2を算出する。算出部22は、算出した角度θ2と傾斜角λの減算によって角度θ3を算出する。算出部22は、算出した角度θ3と余辺の長さL3とに基づく幾何計算によって高さLを算出する。算出部22は、算出した高さLと傾斜角αに基づく幾何計算によって腰位置Dyを得る。
【数1】

【数2】
【数3】
【数4】
【数5】
【数6】
【0060】
算出部22により算出された腰位置Dyは、腰位置計測部25によって、前回の算出処理により計算された腰位置に加算される。腰位置計測部25は、式(7)に示す計算を行う。ただし、P0yは、前回の腰位置であり、P01yは、今回算出された腰位置を示す。このようにして、グローバル座標系における腰位置が算出される。
【数7】
【0061】
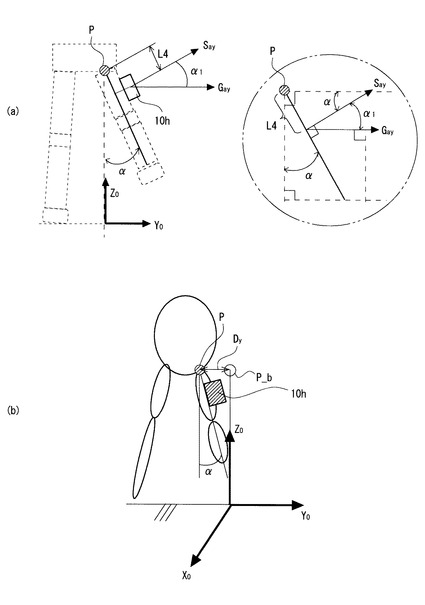
図9から理解されるように、算出部22は、図8の場合とは異なり、リンク10a、10b及びそれらが為す角度等の機構条件を活用することなく、角加速度及び加速度等の加速状態の検知に基づいて腰位置Dyを算出する。麻痺脚が地面から浮いているとき、リンク10a、10b及びそれらが為す角度等を活用しても腰位置Dyを求めることは容易ではない。この点に鑑みて、本実施形態では、上述のように、角加速度及び加速度等の加速状態の検知に基づいて腰位置Dyを算出する。これによって、連続的な腰位置計測をすることが可能となる。なお、図9に示すように、α=α1の関係が成立する。
【0062】
算出部22は、式(8)〜(11)に示す計算原理に基づいて腰位置Dyを算出する。算出部22は、回転角速度検出部12から供給される回転角加速度α''と設定値保持部23から供給される長さL4とに基づいて、腰位置に対応する点Pを回転中心としてリンク10aが回転したときの加速度Slyを算出し(式(8)参照)、加速度検出部13から供給される加速度Sayから加速度Slyを減算し(式(9)参照)、腰移動に応じた値の加速度Skyを得る。次に、算出部22は、加速度Skyと傾斜角度検出部12から供給される傾斜角αに基づいて、軸Y0方向の加速度Gayを算出する(式(10)参照)。次に、算出部22は、算出した加速度Gayを2回積分して腰位置Dyを算出する(式(11)参照)。
【数8】
【数9】
【数10】
【数11】
【0063】
算出部22により算出された腰位置Dyは、腰位置計測部25によって、前回の算出処理により計算された腰位置に加算される。腰位置計測部25は、式(12)に示す計算を行う。ただし、P10yは、前回の腰位置であり、P11yは、今回算出された腰位置を示す。このようにして、グローバル座標系における腰位置が算出される。
【数12】
【0064】
図6から明らかなように、本実施形態では、算出部22は、立脚時腰位置計算a及び遊脚時腰位置計算bを時間的に並列して実行する。この場合、一方の計算結果は真値であるが、他方の計算結果は誤値である。この点を判別するべく、本実施形態では、判定部21によって、立脚/遊脚を判定し、この判定結果に応じて定まる計算結果を活用する。これによって、算出部22による計算処理を連続的に実行させた状態とすることができる。
【0065】
図10を参照して、腰位置計測システム100の動作について説明する。なお、腰位置計測システム100は、スタート〜リターンに至るサイクルを連続的に実行する。
【0066】
はじめに検出処理をする(S100)。具体的には、歩行補助装置10の検出部11〜14は検出動作を為す。
【0067】
次に、立脚又は遊脚の判定をする(S101)。具体的には、判定部21は、接地検出部11の出力がHレベルであり、回転角速度の値が所定値又は閾値以下である場合、立脚状態と判定し、これを示すHレベル信号を出力する。2つの条件のうち一方が不足する場合、判定部21は、患者200の麻痺脚が接地していないと判定し、これを示すLレベル信号を出力する。
【0068】
立脚判定の場合、立脚の開始状態であるか判定する(S102)。判定部21は、前回のS101の判定結果を保持し、これとの比較において、今回の判定結果が初回の立脚判定であるのか判断する。つまり、判定部21は、前回の判定結果が立脚を示す場合、立脚開始とは判断しない。判定部21は、前回の判定結果が遊脚を示す場合、立脚開始と判断する。
【0069】
立脚開始の場合、ローカル座標が仮想的に設定される(S103)。判定部21による判定に応じて、図7に模式的に示すように、X2軸とY2軸とから規定されるローカル座標が仮想的に設定される。
【0070】
次に、伸展保持される(S104)。具体的には、歩行補助装置10は、連続的なトルク生成により、リンク10a、10bを駆動しているが、ある時点において静止しているものと観念する。
【0071】
次に、ローカル座標において腰位置計算する(S105)。具体的には、図8を参照して説明したとおりである。
【0072】
次に、グローバル座標において腰位置計算する(S106)。具体的には、腰位置計測部25は、前回算出したDyに今回算出したDyを加算する(式(7)参照)。
【0073】
次に、モータ駆動する(S107)。具体的には、ある時間において伸展保持とされた状態から離脱し、歩行補助装置10は、トルク生成に基づくリンク駆動を開始する。
【0074】
次に、モニタ表示する(S108)。具体的には、腰位置計測部25から供給される供給値が計測データ処理部31により処理され、計測データ表示部33は、計測データ処理部31から供給されるデータに基づいて腰の変位状態を示す画像を表示する。その後、スタートに戻る。
【0075】
S101において遊脚と判定された場合、遊脚開始であるのかを判断する(S109)。具体的には、判定部21は、前回のS101の判定結果を保持し、これとの比較において、今回の判定結果が初回の立脚判定であるのか判断する。つまり、判定部21は、前回の判定結果が遊脚を示す場合、遊脚開始とは判断しない。判定部21は、前回の判定結果が立脚を示す場合、遊脚開始と判断する。
【0076】
遊脚開始の場合、ローカル座標が仮想的に設定される(S110)。判定部21による判定に応じて、図7に模式的に示すように、X1軸とY1軸とから規定されるローカル座標が仮想的に設定される。
【0077】
次に、パターン供給する(S104)。具体的には、歩行補助装置10は、連続的なトルク生成により、リンク10a、10bを駆動している状態にあり、目標値パターン供給部91は、目標値パターンを目標角度生成部92に対して連続的に供給している。次ステップは、時間的な要素を踏まえて腰位置を算出するため、この点を明確にするために本ステップをフローチャートに盛り込んでいる。
【0078】
次に、ローカル座標において腰位置計算する(S112)。具体的には、図9を参照して説明したとおりである。
【0079】
次に、グローバル座標において腰位置計算する(S106)。具体的には、腰位置計測部25は、前回算出したDyに今回算出したDyを加算する(式(12)参照)。
【0080】
次に、上述の場合と同様に、モータ駆動する(S107)、モニタ表示する(S108)。その後、スタートに戻る。
【0081】
上述の説明から明らかなように、本実施形態では、算出部22は、図8を参照して説明した算出処理により腰位置を算出し、かつ図9を参照して説明した算出処理により腰位置を算出する。これによって、連続的な腰位置の変位を簡易に計測することが可能となる。また、既存の歩行補助装置10を活用した態様にて、患者200の腰位置の変位を計測することが可能となる。この場合、大がかりな装置構成を伴うこともない。
【0082】
実施の形態2
本実施形態では、実施の形態1とは異なる方法で遊脚時の腰位置(移動量)を算出する。これによって、経時的に重畳する腰位置の誤差を効果的に低減することが可能となる。この場合であっても実施の形態1と同様の効果を得ることができる。
【0083】
具体的には、算出部22は、図11に示すステップを実行する。
【0084】
まず、立脚時の最終サイクルで算出される速度を初期速度として設定し、かつY軸方向の移動量を0として設定する(S201)。
【0085】
次に、算出部22は、式(8)を実行して、加速度Slyを算出する(S202)。
【0086】
次に、算出部22は、算出した加速度Slyを積分した速度から上述の初期速度を減算して速度を算出する(S203)。
【0087】
次に、算出部22は、S203により算出された速度を積分する(S204)。これによって、経時的に重畳する腰位置の誤差を効果的に低減することが可能となる。
【0088】
図6を参照して補足説明すれば、本実施形態では、時刻t0、時刻t2のとき、積算誤差をリセットすべく、今回の計算過程で算出される速度から前回の計算過程で算出された速度を減算した後、速度の積分により加速度を算出する。これによって、腰位置の算出精度を効果的に高めることが可能になる。
【0089】
実施の形態3
本実施形態では、コンピュータ30は、患者200の歩行状態を判定して表示する。これによって、リハビリ指導者は、患者200の歩行状態を直感的に把握することが可能となる。また、患者自身に対してコンピュータ30の表示を提示すれば、患者200は、自身の歩行状態を、その場で直感的に把握することが可能となる。なお、この場合であっても実施の形態1及び2と同様の効果を得ることができる。
【0090】
図12に示すように、患者の腰位置が時系列に変動するものとする。なお、図12の実線は、計測ユニット20により算出された患者の腰位置の変動を示す。図12の上部分は、コンピュータ30の表示部に表示されているものとする。
【0091】
時刻t0と時刻t1間では、腰位置は、閾値位置TH2を超える。この時、コンピュータ30は、自身が備える表示部35の点灯35cを点灯させる。時刻t1と時刻t2間では、腰位置は、閾値位置TH2を下回る。この時、コンピュータ30は、表示部35の点灯35bを点灯させる。時刻t2と時刻t3間では、腰位置は、閾値位置TH1を超える。この時、コンピュータ30は、表示部35の点灯35aを点灯させる。この構成を採用することによって、リハビリ指導者及び患者に対して、より直接的に現在の歩行状態を提示することが可能となる。
【0092】
なお、コンピュータ30の具体的な構成は任意である。閾値位置TH1、TH2は、ユーザーにより事前設定されているものとする。閾値数を増加して、より多段階的/詳細に歩行状態を判別しても良い。
【0093】
なお、本発明は上記実施の形態に限られたものではなく、趣旨を逸脱しない範囲で適宜変更することが可能である。例えば、加速度検出の具体方法は任意である。角速度検出の具体的な方法は任意である。治具の具体的な構成は任意である。片麻痺患者以外のユーザー(例えば、スポーツ選手)に対しても適用し得る。歩行補助装置10の具体的な構成は任意である。計測ユニットの具体的な構成は任意である。コンピュータ30の具体的な構成は任意である。
【符号の説明】
【0094】
100 腰位置計測システム
10 歩行補助装置
20 計測ユニット
30 コンピュータ
11 接地検出部
12 傾斜角度/回転角速度検出部
13 加速度検出部
14 リンク角度検出部
21 判定部
22 算出部
23 設定値保持部
24 選択部
25 腰位置計測部
26 モータ
27 傾斜センサ
31 計測データ処理部
32 入力部
33 計測データ表示部
35 表示部
91 目標値パターン供給部
92 目標角度生成部
93 加算部
94 ドライバ
95 モータ
【技術分野】
【0001】
本発明は、位置変動検出装置、これを含むシステム、及び位置変動検出装置の動作方法に関する。
【背景技術】
【0002】
脳卒中等によって片脚麻痺となった患者は、その身体機能の回復のため、歩行運動等の反復が要求される場合がある。患者の身体機能の回復を早めるため、リハビリ指導者は、患者の現状/改善具合を見て、自己の経験則を踏まえて、患者に対して適切なアドバイスをする。リハビリ指導者による患者へのアドバイスは、リハビリ指導者の個人的経験則に基づくものが多く、リハビリ指導者の能力等に依存する程度が大きい。
【0003】
特許文献1には、歩行感覚生成装置が開示されている。特許文献1の図1に示すように、歩行感覚生成装置は、ベルト機構1を有し、歩行者は、当該ベルト機構1上を歩行する。ベルト機構1は、3軸歩行面保持機構3上に設置されており、任意の傾斜角度に調整される。歩行者の脚先位置はCCDカメラ4で検出され、腰部位置は糸式位置センサ5で検出され、頭部位置は磁気式位置姿勢計測装置6で検出され、各検出値は、計算機20に入力される。歩行者の前方には、大型スクリーン7が設けられており、歩行動作にあわせた空間の映像が提示される。
【0004】
特許文献2には、ユーザーの第1脚に対して装具を付け、装具が装着されていない第2脚の位置を計測する装置が開示されている。特許文献2の図1に示すように、脚装置12には、第2脚を撮像するカメラ42が設けられている。コントローラ32は、カメラ42が撮像した画像に基づいてカメラ位置に対する第2脚の位置を演算する。コントローラ32による演算処理により、第1脚の足位置に対する第2脚の足の相対位置が算出される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2923493号
【特許文献2】特開2010−259469号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
患者の早期回復に繋がる効果的なリハビリを提供するためには、患者の現在の運動状態(歩行状態等)を的確に把握することが望ましい。現状、患者の運動を時分割して画像取得して解析することで患者の運動状態を計測する手法が提供されている。また、床、マット等の構造物に圧力センサを埋め込んで患者の運動状態を計測する手法が提供されている。しかしながら、このような場合には、比較的大型な装置が必要となる場合が多く、患者の運動状態を簡易に計測することはできない場合が多い。
【0007】
上述の説明から明らかなように、ユーザーの運動状態を簡易に計測することが強く望まれている。
【課題を解決するための手段】
【0008】
本発明に係る位置変動検出装置は、複数のリンク、及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置であって、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。この構成を採用することによって、ユーザーの運動状態を簡易に計測することが可能になる。
【0009】
前記所定方向における前記所定部位の位置を算出する第1位置算出部と、前記ユーザーの前記脚が接地しているか否かを示す情報に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、を備える、と良い。
【0010】
前記検出値は、前記ユーザーの前記脚が接地しているか否かを示す値を更に含む、上記いずれかの位置変動検出装置であって、前記所定方向における前記所定部位の位置を算出する第1位置算出部と、前記検出装置から供給される前記検出値に基づいて、前記ユーザーの前記脚が接地しているか否かを判定する判定部と、前記判定部による判定結果に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、を備える、と良い。
【0011】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える、上記いずれかに記載の位置変動検出装置であって、前記第1位置算出部は、前記所定部位を中心として前記リンクが回転する際に検出される角加速度と、前記リンクの変位に応じて前記検出装置が検出する加速度とに基づいて前記リンクの前記加速度を算出し、当該算出した加速度を積分する、と良い。
【0012】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかに記載の位置変動検出装置であって、前記第1位置算出部は、前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する、と良い。
【0013】
前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかの位置変動検出装置であって、前記第1位置算出部による前記所定部位の鉛直軸線に沿う高さの算出処理と、前記第1位置算出部による所定方向に沿う前記リンクの前記加速度の算出処理とは時間的に並列して実行される、と良い。
【0014】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかの位置変動検出装置であって、前記第1位置算出部は、複数の前記リンクの各長さに応じた複数の設定値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の前記鉛直軸線に沿う高さを算出する、と良い。
【0015】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える上記いずれかに記載の位置変動検出装置であって、前記第1位置算出部は、複数の前記リンクの各長さを示す複数のリンク長値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の鉛直軸線に沿う高さを算出し、当該高さと鉛直方向に対して前記リンクが為す角度とに基づいて前記所定方向における前記所定部位の位置を算出する、と良い。
【0016】
前記治具は、ユーザーの脚の膝に対してトルクを与えることでユーザーの歩行を補助する歩行補助装置である、と良い。複数の前記リンクは、前記ユーザーの大腿骨に対応づけて配置された第1リンクと、前記ユーザーの脛骨に対応づけて配置された第2リンクとを含む、と良い。前記所定位置は、前記ユーザーの腰位置である、と良い。
【0017】
本発明に係る位置変動検出システムは、複数のリンク、及び検出装置を含むと共に、ユーザーの脚に対して装着される治具と、前記治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置と、を備える位置変動検出システムであって、前記位置変動検出装置は、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。
【0018】
本発明に係る位置変動検出装置の動作方法は、複数のリンク及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置の動作方法であって、 前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する。
【発明の効果】
【0019】
本発明によれば、ユーザーの運動状態を簡易に計測することできる。
【図面の簡単な説明】
【0020】
【図1】実施の形態1にかかる腰位置計測システムの概略的な模式図である。
【図2】実施の形態1にかかる歩行補助装置の構成及びユーザーに対するその装着状態を示す模式図である。
【図3】実施の形態1にかかるリンク同士が為すリンク角度を示す図である。
【図4】実施の形態1にかかる歩行補助装置の構成を示す概略的なブロック図である。
【図5】実施の形態1にかかる腰位置計測システムの構成を示す概略的なブロック図である。
【図6】実施の形態1にかかる腰位置計測システムの動作を示すタイミングチャートである。
【図7】実施の形態1にかかる腰位置の変動を示す模式図である。
【図8】実施の形態1にかかる立脚時の腰位置を算出する手順を示す図である。
【図9】実施の形態1にかかる遊脚時の腰位置を算出する手順を示す図である。
【図10】実施の形態1にかかる腰位置計測システムの動作を示す概略的なフローチャートである。
【図11】実施の形態2にかかる腰位置計測システムの動作を示すタイミングチャートである。
【図12】実施の形態3にかかる腰位置計測システムを説明するための図である。
【図13】健常者と片脚麻痺患者の歩行状態の相違を示す図である。
【発明を実施するための形態】
【0021】
実施の形態1
本実施形態に係る位置変動検出装置は、複数のリンク及び検出装置を含む治具を患者の脚に対して装着し、治具の検出装置から供給される検出値に基づいて患者の腰位置の位置変動を検出する。位置変動検出装置は、検出装置から供給される検出値に基づいて鉛直軸線に対して交差する所定方向における腰位置を算出し、検出装置から供給される検出値に基づいて所定方向に沿うリンクの加速度を算出し、この加速度の積分に基づいて所定方向における腰位置を算出する。
【0022】
この構成によれば、異なる内容の算出処理に基づいて、立脚及び遊脚時の腰位置が夫々算出され、患者の腰位置の変動を簡易に計測することが可能になる。特に、加速度を活用した演算処理に基づいて、遊脚時の腰位置を算出することで、連続した腰位置の変位を観察することが可能となる。複数のリンク及び検出装置を含む治具として、例えば、歩行補助装置を活用することによって、既存の装置を流用した態様にて、腰位置の変位を検出することが可能となる。
【0023】
図13に示すように、健常者と比べて、片麻痺患者は、横揺れした状態で歩行する。従って、片麻痺患者の歩行に伴うその腰位置の変動を観察することで、片麻痺患者の歩行状態の改善度合いを測ることができる。なお、図13の左側は、健常者の歩行に伴って変位するその腰位置の軌跡を示し、図13の右側は、片麻痺患者の歩行に伴って変位するその腰位置の軌跡を示す。
【0024】
上述の構成によれば、患者のリハビリ時に患者の腰位置の変動を指導者又は患者に提示することが可能となる。従って、より効果的なリハビリ運動を達成することが可能になる。例えば、指導者は、ディスプレイに表示される腰位置の変動状態を勘案して、適切なアドバイスを患者に対してリアルタイム的に提示することができる。
【0025】
以下、図面を参照して本発明の実施の形態について具体的に説明する。図1は、腰位置計測システムの概略的な模式図である。図2は、歩行補助装置の構成及び患者に対するその装着状態を示す模式図である。図3は、リンク同士が為すリンク角度を示す図である。図4は、歩行補助装置の構成を示す概略的なブロック図である。図5は、腰位置計測システムの構成を示す概略的なブロック図である。図6は、腰位置計測システムの動作を示すタイミングチャートである。図7は、腰位置の変動を示す模式図である。図8は、立脚時の腰位置を算出する手順を示す図である。図9は、遊脚時の腰位置を算出する手順を示す図である。図10は、腰位置計測システムの動作を示す概略的なフローチャートである。
【0026】
図1に示すように、腰位置計測システム100は、歩行補助装置(治具)10、計測ユニット20、及びコンピュータ30を有する。歩行補助装置10の出力は、計測ユニット20に接続する。計測ユニット20の出力は、コンピュータ30に入力する。なお、計測ユニット20の機能をコンピュータ30に対して組み込んでも良く、その逆も然りである。すなわち、システム100の具体的な構成は任意であり、当業者をすれば、適宜変更可能である。位置変動検出装置は、計測ユニット20単体又は、計測ユニット20とコンピュータ30との組み合わせによって構成される。
【0027】
図1に示す腰位置計測システム100は、図1を正面視して右脚が麻痺している患者200の腰位置の変動を計測する。コンピュータ30の表示画面には、患者200の歩行に応じた患者200の腰位置の変動が同時的に表示される。患者200のリハビリ指導者は、患者200の現状の歩行動作を勘案して適切なアドバイスを患者200に対して提示することができる。患者200のリハビリ運動と指導者によるアドバイス間に大きなタイムラグが存在しないため、指導者のアドバイスを受けて、患者200は、現姿勢等の修正を直ちに行うことができる。また、患者200の腰位置データを保存等しておくことで、例えば、経時的な患者200歩行状態の推移も観察することが可能になる。例えば、週単位又は月単位での患者200の歩行状態の推移を観察することが可能になる。
【0028】
図1及び図2に示すように、歩行補助装置(治具)10は、患者200の腰部からその脚部に至る範囲で患者200の脚に沿って装着される装着型治具/装着型ロボットである。歩行補助装置10は、患者200の麻痺脚の関節に対してトルクを与え、患者200の麻痺脚の歩行運動を補助するように構成されている。歩行補助装置10は、計測ユニット20に対して各種センシング結果を供給し、これにより、患者200の腰位置が計測ユニット20により算出される。計測ユニット20で算出された腰位置は、コンピュータ30の表示画面に表示され、腰位置の変動状態がリハビリ指導者に提示される。患者200の歩行状態の評価時、患者200の腰位置は重要な指標となる。従って、患者200の歩行運動と患者200の腰位置の変動状態を同時的に把握することで、リハビリ指導者は患者200に対して適切なアドバイスを提示することができ、これを受けて、患者200は、現状の歩行状態を修正することができる。
【0029】
図1及び図2に示すように、歩行補助装置10は、リンク(軸部材)10a、リンク10b、フット部(足台部)10c、ジョイント部(連結中継部)10d、ジョイント部10e、ベルト(取り付け部)10f、ベルト(取り付け部)10g、およびコントローラ部(制御部)10hを有する。リンク10a、10bのリンク長は、患者200の脚長さに応じて適当に調整可能である。
【0030】
リンク10aは、ベルト10fによって、患者200の大腿骨に対応づけて患者200の脚に対して位置固定される。リンク10bは、ベルト10gによって、患者200の脛骨に対応づけて患者200の脚に対して位置固定される。ジョイント部10dは、リンク10aとリンク10bとの接続部分を構成し、患者200の脚の膝位置に対応づけて配置される。フット部10c上には、患者200の足が載せられる。ジョイント部10eは、リンク10bとフット部10cとの接続部分を構成し、患者200の足首位置に対応づけて配置される。コントローラ部10hは、患者200の腰位置に対応づけて配置される。
【0031】
ジョイント部10dは、図3に模式的に示すリンク10aとリンク10bとが為すリンク角度を計測する計測器(例えば、アブソリュートエンコーダ等)を内蔵する。ジョイント部10dは、更に、リンク10aとリンク10b間の同リンク角度を調整する駆動装置(例えば、電気モータ等)を内蔵する。コントローラ部10hは、マイコン(Microcomputer)及び各種センサ類(ジャイロセンサ、加速度センサ等)を内蔵する。フット部10cには、患者200の麻痺脚が接地しているか否かを検知する検出器(例えば、圧力センサ等)が設けられている。ジョイント部10eには、モータ等の駆動装置は内蔵されず、フット部10cは、リンク10bに対して揺動自在に連結している。
【0032】
歩行補助装置10は、ジョイント部10dに設けられた駆動装置を所定態様にて駆動することによって、リンク10aとリンク10bとが為すリンク角度(図3参照)を適当に調整し、これにより患者200の麻痺脚の歩行運動を補助する。
【0033】
歩行補助装置10は、例えば、図4に示すように構成される。図4に示すように、歩行補助装置10は、目標値パターン供給部91、目標角度生成部92、加算部93、ドライバ94、及びモータ95を含む。
【0034】
目標値パターン供給部91は、患者200の歩行状態を勘案して予め作成された目標値パターンを保持し、これを目標角度生成部92に対して供給する。目標角度生成部92は、目標値パターン供給部91から供給された目標値パターンに基づいて、現時点における目標角度を生成し、これを加算部93に供給する。
【0035】
加算部93は、目標角度生成部92から供給される目標角度からジョイント部10dに設けられた計測装置から供給されるリンク角度を減算し、この算出値をドライバ94に供給する。ドライバ94は、加算部93からの供給値に基づいてモータ95を制御する制御信号を生成し、これをモータ95に供給する。
【0036】
モータ95は、ドライバ94から供給される制御信号に応じて軸回転動作する。モータ95で生じる軸回転力は、リンク機構に対して伝達する。このようにして、リンク10aとリンク10b間のリンク角度が、患者200の麻痺脚の歩行パターンに応じて適当に調整される。
【0037】
なお、図4に示す機能ブロックは、コントローラ部10hに内蔵されたマイコンがジョイント部10dに内蔵された電気モータを駆動することによって実現されるものである。コントローラ部10hの内蔵マイコンは、プログラムを順次実行し、目標角度と現リンク角度とに応じた駆動信号をドライバ94に対して供給する。このようにモータ95をソフトウェア制御することが望ましい。
【0038】
図5を参照して、腰位置計測システム100の構成列について説明する。図5に示すように、歩行補助装置10は、接地検出部11、傾斜角度/回転角速度検出部(以下、傾斜角度検出部又は回転角速度検出部と呼ぶ場合がある)12、加速度検出部13、リンク角度検出部14を含む。説明の便宜上、各機能部11〜14を単に検出部(検出装置)と呼ぶ場合がある。計測ユニット20は、判定部21、算出部(第1位置算出部)22、設定値保持部23、選択部24、および腰位置計測部(第2位置算出部)25を含む。コンピュータは、計測データ処理部31、入力部32、および計測データ表示部33を含む。
【0039】
図5に示す各機能ブロックの接続関係は、次のとおりである。判定部21には、検出部11、検出部12の各出力が接続される。算出部22には、検出部12〜14の各出力が接続される。設定値保持部23の出力は、算出部22に接続される。選択部24には、判定部21及び算出部22の各出力が接続される。選択部24の出力は、腰位置計測部25に接続される。腰位置計測部25の出力は、計測データ処理部31に接続される。計測データ処理部31の出力は、計測データ表示部33に接続される。入力部32の出力は、設定値保持部23に接続される。なお、図5に示す接続関係は、あくまで例示的なものであり、不図示の接続関係が存在する場合もある。
【0040】
図5に示す歩行補助装置10は、検出部11〜14を含む。検出部11は、患者200の麻痺脚が接地していることを検出する。接地検出部11は、例えば、患者200の麻痺脚が接地している時、Hレベル信号を出力し、患者200の麻痺脚が接地していない時、Lレベル信号を出力する。検出部11は、フット部10cに設けられた圧力センサ等から構成される。
【0041】
検出部12は、任意の種類のジャイロセンサから構成され、回転角速度と傾斜角度(図8に示す角度γ、α等)とを検出する。なお、傾斜角度αは、患者200の歩行方向(X軸方向)を側面視して、鉛直方向(Z軸方向)に対してリンク10aの長手方向が為す角度である。傾斜角度αは、患者200の歩行方向(X軸方向)から見て、鉛直方向(Z軸方向)に対してリンク10aの長手方向が為す角度である。検出部12は、歩行補助装置10のコントローラ部10hに内蔵される。
【0042】
検出部13は、任意の種類の加速度センサから構成され、3軸方向の加速度を検出する。検出部12と同様、検出部13は、歩行補助装置10のコントローラ部10hに内蔵される。なお、起立状態の患者の脚に対して所望のように歩行補助装置10が取り付けられているのとき、検出部13により検出される加速度の一つは、鉛直方向の加速となる。
【0043】
検出部14は、ジョイント部10dに内蔵されたエンコーダ等から構成され、リンク角を示す値をコントローラ部10h内のマイコンへ供給する。
【0044】
図5に示す計測ユニット20は、マイコンを内蔵し、判定部21〜腰位置計測部25の各処理を実行する。マイコンによるプログラムの実行によって、歩行補助装置10の検出部から供給される検出値が処理され、最終的に、グローバル座標(図7に示すXg、Yg座標系)における患者200の腰位置が算出される。
【0045】
判定部21は、検出部11、12の各出力に基づいて、患者200の麻痺脚が接地しているか否かを判定する。判定部21は、検出部11からHレベル信号が入力し、かつ検出部12から供給されるYs方向の加速度が零(又は所定閾値以下)のとき、患者200の麻痺脚が接地していると判定し、これを示すHレベル信号を出力する。2つの条件のうち一方が不足する場合、判定部21は、患者200の麻痺脚が接地していないと判定し、これを示すLレベル信号を出力する。なお、判定部21は、その判定精度を効果的に高めるべく、Ys方向の加速度も参照して、接地状態を判定している(図13参照)。
【0046】
算出部22は、検出部12〜14から供給される検出値に基づいて患者200の腰位置を算出する。設定値保持部23は、算出部22による算出処理に用いられる設定値(図8に示すリンク長L1、L2、図9に示す間隔L4等)を保持する。選択部24は、判定部21の出力に応じて、算出部22からの2つの出力(腰位置データVa、腰位置データVb)の一方を選択する。腰位置計測部25は、選択部24を介して供給される腰位置の座標をグローバル座標に変換して出力する。
【0047】
図5に示すコンピュータ30は、CPU(Central Processing Unit)、メモリ、ハードディスク等を具備する一般的な計算機であり、アプリケーションの実行により、計測ユニット20から供給されるデータに応じた表示画像を生成し、これを表示パネル等の表示部に表示する。コンピュータ30は、計測ユニット20に設けられた設定値保持部23の保持値の変更を計測ユニット20に対して指示する。
【0048】
計測データ処理部31は、腰位置計測部25からの供給値を処理し、表示データを生成する。計測データ表示部33は、計測データ処理部31から供給される表示データに応じた表示をする。入力部32は、キーボード等の入力装置を含み、設定値保持部23の保持値の変更を指示する。これに応じて、設定値保持部23は、自身の保持値を、入力部32からの供給値に書き換える。
【0049】
図6に模式的に示すように、患者200が歩行運動するとき、時間経過に伴って、立脚と遊脚とを繰り返す。立脚時、麻痺脚が接地しており、他方の健常脚は地面から離れた状態で前方に押し出される。遊脚時、健常脚が接地しており、他方の麻痺脚が地面から離れた状態で前方に押し出される。
【0050】
図6に模式的に示すように、判定部21の出力は、患者200の歩行状態(立脚/遊脚)に応じてH−Lレベル間を変動する。算出部22は、立脚時腰位置計算aと遊脚時腰位置計算bとを時間的に並列して連続的に実行する。選択部24は、判定部21の出力に応じて、算出部22の出力のいずれかを選択する。腰位置計測部25は、選択部24を介して連続的に供給される算出部22の算出値に基づいて、腰位置の相対変位を時間的に連続して算出する。
【0051】
例えば、時刻t0〜t1間は、遊脚状態にあり、判定部21の出力はLレベルにある。このとき、選択部24は、遊脚時腰位置計算bによる算出値Vbを選択出力する。腰位置計測部25は、順次入力する算出値Vbに基づいて腰位置の相対変位を順次算出する。
【0052】
図7に模式的に示すように、患者200の歩行運動に応じて、腰位置P0は、軸Xg及び軸Ygから規定されるグローバル座標系内を移動する。なお、軸Xgは、患者200の進行方向に一致する。軸Ygは、軸Xg及び鉛直軸線に対して直行する軸線であり、患者200の胴幅方向に対応する。グローバル座標系の原点は、例えば、麻痺脚が最初の一歩を踏み出して接地した時の腰位置に設定される。グローバル座標系の原点の設定方法は任意であり、これに限られるべきものではない。
【0053】
図7に示す腰位置P0は、例えば、所定の時間間隔で計測される。腰位置P0は、初期位置であり、本位置は、グローバル座標系における原点となる。腰位置P10は、麻痺脚が地面から離れた時の腰位置である。腰位置P11は、遊脚中の腰位置である。腰位置P20は、麻痺脚が接地した時の腰位置である。腰位置P21は、立脚中の腰位置である。
【0054】
図7に示すように、患者200の現在位置に対応して、軸Xmと軸Ym(mは、任意の自然数とする)から規定されるローカル座標系が定義されている。軸Xmは、グローバル座標系の軸Xgに対して平行な軸線である。軸Ymは、グローバル座標系の軸Ymに対して平行な軸線である。ローカル座標系は、患者200の腰位置、より正確には、歩行補助装置10のコントローラ部10hに対して設定された座標系である。ローカル座標系は、患者200の歩行に応じて、グローバル座標系内を移動するものと理解できる。
【0055】
上述のように、算出部22は、検出部11〜14の検出値に基づいて患者200の腰位置を算出する。この点について、図8及び図9を参照して詳細説明する。なお、図8は、立脚時の腰位置の算出原理を示す図である。図9は、遊脚時の腰位置の算出原理を示す図である。
【0056】
図8から理解されるように、算出部22は、幾何計算に基づいて腰位置Dyを算出する。腰位置Dyは、ローカル軸Ym及びグローバル軸Yg方向における腰位置を示す。より具体的には、算出部22は、リンク長L1、L2、リンク角度θ1、傾斜角γに基づいて高さLを算出し、その後、算出した高さL、傾斜角αに基づいて腰位置Dyを算出する。
【0057】
リンク長L1、L2は、設定値保持部23から算出部22に供給される。リンク角度θ1は、リンク角度検出部14から算出部22に供給される。傾斜角γ、αは、傾斜角度検出部12から算出部22に供給される。
【0058】
算出部22により実行される計算式を示す。なお、次の示す式(1)〜(6)のうち、式(1)〜式(5)は、図8(a)に示されており、式(6)は、図8(b)に示されている。
【0059】
算出部22は、第1式に基づいて、リンク10aとリンク10bに2辺とする三角形のその余の辺(以下、余辺と呼ぶ場合がある)の長さを算出する。算出部22は、第2式を展開して得られる第3式に基づいて、リンク10aと余辺とが為す角度θ2を算出する。算出部22は、算出した角度θ2と傾斜角λの減算によって角度θ3を算出する。算出部22は、算出した角度θ3と余辺の長さL3とに基づく幾何計算によって高さLを算出する。算出部22は、算出した高さLと傾斜角αに基づく幾何計算によって腰位置Dyを得る。
【数1】
【数2】
【数3】
【数4】
【数5】
【数6】
【0060】
算出部22により算出された腰位置Dyは、腰位置計測部25によって、前回の算出処理により計算された腰位置に加算される。腰位置計測部25は、式(7)に示す計算を行う。ただし、P0yは、前回の腰位置であり、P01yは、今回算出された腰位置を示す。このようにして、グローバル座標系における腰位置が算出される。
【数7】
【0061】
図9から理解されるように、算出部22は、図8の場合とは異なり、リンク10a、10b及びそれらが為す角度等の機構条件を活用することなく、角加速度及び加速度等の加速状態の検知に基づいて腰位置Dyを算出する。麻痺脚が地面から浮いているとき、リンク10a、10b及びそれらが為す角度等を活用しても腰位置Dyを求めることは容易ではない。この点に鑑みて、本実施形態では、上述のように、角加速度及び加速度等の加速状態の検知に基づいて腰位置Dyを算出する。これによって、連続的な腰位置計測をすることが可能となる。なお、図9に示すように、α=α1の関係が成立する。
【0062】
算出部22は、式(8)〜(11)に示す計算原理に基づいて腰位置Dyを算出する。算出部22は、回転角速度検出部12から供給される回転角加速度α''と設定値保持部23から供給される長さL4とに基づいて、腰位置に対応する点Pを回転中心としてリンク10aが回転したときの加速度Slyを算出し(式(8)参照)、加速度検出部13から供給される加速度Sayから加速度Slyを減算し(式(9)参照)、腰移動に応じた値の加速度Skyを得る。次に、算出部22は、加速度Skyと傾斜角度検出部12から供給される傾斜角αに基づいて、軸Y0方向の加速度Gayを算出する(式(10)参照)。次に、算出部22は、算出した加速度Gayを2回積分して腰位置Dyを算出する(式(11)参照)。
【数8】
【数9】
【数10】
【数11】
【0063】
算出部22により算出された腰位置Dyは、腰位置計測部25によって、前回の算出処理により計算された腰位置に加算される。腰位置計測部25は、式(12)に示す計算を行う。ただし、P10yは、前回の腰位置であり、P11yは、今回算出された腰位置を示す。このようにして、グローバル座標系における腰位置が算出される。
【数12】
【0064】
図6から明らかなように、本実施形態では、算出部22は、立脚時腰位置計算a及び遊脚時腰位置計算bを時間的に並列して実行する。この場合、一方の計算結果は真値であるが、他方の計算結果は誤値である。この点を判別するべく、本実施形態では、判定部21によって、立脚/遊脚を判定し、この判定結果に応じて定まる計算結果を活用する。これによって、算出部22による計算処理を連続的に実行させた状態とすることができる。
【0065】
図10を参照して、腰位置計測システム100の動作について説明する。なお、腰位置計測システム100は、スタート〜リターンに至るサイクルを連続的に実行する。
【0066】
はじめに検出処理をする(S100)。具体的には、歩行補助装置10の検出部11〜14は検出動作を為す。
【0067】
次に、立脚又は遊脚の判定をする(S101)。具体的には、判定部21は、接地検出部11の出力がHレベルであり、回転角速度の値が所定値又は閾値以下である場合、立脚状態と判定し、これを示すHレベル信号を出力する。2つの条件のうち一方が不足する場合、判定部21は、患者200の麻痺脚が接地していないと判定し、これを示すLレベル信号を出力する。
【0068】
立脚判定の場合、立脚の開始状態であるか判定する(S102)。判定部21は、前回のS101の判定結果を保持し、これとの比較において、今回の判定結果が初回の立脚判定であるのか判断する。つまり、判定部21は、前回の判定結果が立脚を示す場合、立脚開始とは判断しない。判定部21は、前回の判定結果が遊脚を示す場合、立脚開始と判断する。
【0069】
立脚開始の場合、ローカル座標が仮想的に設定される(S103)。判定部21による判定に応じて、図7に模式的に示すように、X2軸とY2軸とから規定されるローカル座標が仮想的に設定される。
【0070】
次に、伸展保持される(S104)。具体的には、歩行補助装置10は、連続的なトルク生成により、リンク10a、10bを駆動しているが、ある時点において静止しているものと観念する。
【0071】
次に、ローカル座標において腰位置計算する(S105)。具体的には、図8を参照して説明したとおりである。
【0072】
次に、グローバル座標において腰位置計算する(S106)。具体的には、腰位置計測部25は、前回算出したDyに今回算出したDyを加算する(式(7)参照)。
【0073】
次に、モータ駆動する(S107)。具体的には、ある時間において伸展保持とされた状態から離脱し、歩行補助装置10は、トルク生成に基づくリンク駆動を開始する。
【0074】
次に、モニタ表示する(S108)。具体的には、腰位置計測部25から供給される供給値が計測データ処理部31により処理され、計測データ表示部33は、計測データ処理部31から供給されるデータに基づいて腰の変位状態を示す画像を表示する。その後、スタートに戻る。
【0075】
S101において遊脚と判定された場合、遊脚開始であるのかを判断する(S109)。具体的には、判定部21は、前回のS101の判定結果を保持し、これとの比較において、今回の判定結果が初回の立脚判定であるのか判断する。つまり、判定部21は、前回の判定結果が遊脚を示す場合、遊脚開始とは判断しない。判定部21は、前回の判定結果が立脚を示す場合、遊脚開始と判断する。
【0076】
遊脚開始の場合、ローカル座標が仮想的に設定される(S110)。判定部21による判定に応じて、図7に模式的に示すように、X1軸とY1軸とから規定されるローカル座標が仮想的に設定される。
【0077】
次に、パターン供給する(S104)。具体的には、歩行補助装置10は、連続的なトルク生成により、リンク10a、10bを駆動している状態にあり、目標値パターン供給部91は、目標値パターンを目標角度生成部92に対して連続的に供給している。次ステップは、時間的な要素を踏まえて腰位置を算出するため、この点を明確にするために本ステップをフローチャートに盛り込んでいる。
【0078】
次に、ローカル座標において腰位置計算する(S112)。具体的には、図9を参照して説明したとおりである。
【0079】
次に、グローバル座標において腰位置計算する(S106)。具体的には、腰位置計測部25は、前回算出したDyに今回算出したDyを加算する(式(12)参照)。
【0080】
次に、上述の場合と同様に、モータ駆動する(S107)、モニタ表示する(S108)。その後、スタートに戻る。
【0081】
上述の説明から明らかなように、本実施形態では、算出部22は、図8を参照して説明した算出処理により腰位置を算出し、かつ図9を参照して説明した算出処理により腰位置を算出する。これによって、連続的な腰位置の変位を簡易に計測することが可能となる。また、既存の歩行補助装置10を活用した態様にて、患者200の腰位置の変位を計測することが可能となる。この場合、大がかりな装置構成を伴うこともない。
【0082】
実施の形態2
本実施形態では、実施の形態1とは異なる方法で遊脚時の腰位置(移動量)を算出する。これによって、経時的に重畳する腰位置の誤差を効果的に低減することが可能となる。この場合であっても実施の形態1と同様の効果を得ることができる。
【0083】
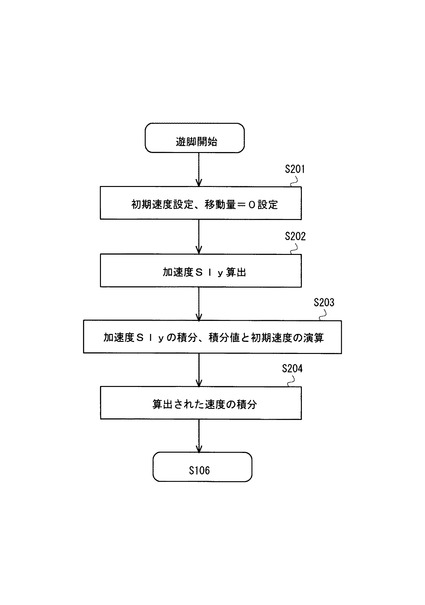
具体的には、算出部22は、図11に示すステップを実行する。
【0084】
まず、立脚時の最終サイクルで算出される速度を初期速度として設定し、かつY軸方向の移動量を0として設定する(S201)。
【0085】
次に、算出部22は、式(8)を実行して、加速度Slyを算出する(S202)。
【0086】
次に、算出部22は、算出した加速度Slyを積分した速度から上述の初期速度を減算して速度を算出する(S203)。
【0087】
次に、算出部22は、S203により算出された速度を積分する(S204)。これによって、経時的に重畳する腰位置の誤差を効果的に低減することが可能となる。
【0088】
図6を参照して補足説明すれば、本実施形態では、時刻t0、時刻t2のとき、積算誤差をリセットすべく、今回の計算過程で算出される速度から前回の計算過程で算出された速度を減算した後、速度の積分により加速度を算出する。これによって、腰位置の算出精度を効果的に高めることが可能になる。
【0089】
実施の形態3
本実施形態では、コンピュータ30は、患者200の歩行状態を判定して表示する。これによって、リハビリ指導者は、患者200の歩行状態を直感的に把握することが可能となる。また、患者自身に対してコンピュータ30の表示を提示すれば、患者200は、自身の歩行状態を、その場で直感的に把握することが可能となる。なお、この場合であっても実施の形態1及び2と同様の効果を得ることができる。
【0090】
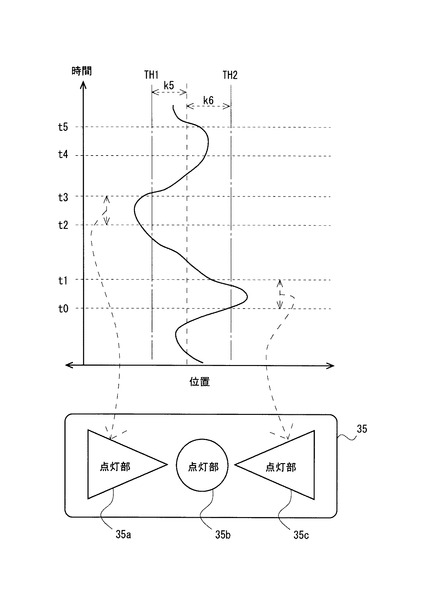
図12に示すように、患者の腰位置が時系列に変動するものとする。なお、図12の実線は、計測ユニット20により算出された患者の腰位置の変動を示す。図12の上部分は、コンピュータ30の表示部に表示されているものとする。
【0091】
時刻t0と時刻t1間では、腰位置は、閾値位置TH2を超える。この時、コンピュータ30は、自身が備える表示部35の点灯35cを点灯させる。時刻t1と時刻t2間では、腰位置は、閾値位置TH2を下回る。この時、コンピュータ30は、表示部35の点灯35bを点灯させる。時刻t2と時刻t3間では、腰位置は、閾値位置TH1を超える。この時、コンピュータ30は、表示部35の点灯35aを点灯させる。この構成を採用することによって、リハビリ指導者及び患者に対して、より直接的に現在の歩行状態を提示することが可能となる。
【0092】
なお、コンピュータ30の具体的な構成は任意である。閾値位置TH1、TH2は、ユーザーにより事前設定されているものとする。閾値数を増加して、より多段階的/詳細に歩行状態を判別しても良い。
【0093】
なお、本発明は上記実施の形態に限られたものではなく、趣旨を逸脱しない範囲で適宜変更することが可能である。例えば、加速度検出の具体方法は任意である。角速度検出の具体的な方法は任意である。治具の具体的な構成は任意である。片麻痺患者以外のユーザー(例えば、スポーツ選手)に対しても適用し得る。歩行補助装置10の具体的な構成は任意である。計測ユニットの具体的な構成は任意である。コンピュータ30の具体的な構成は任意である。
【符号の説明】
【0094】
100 腰位置計測システム
10 歩行補助装置
20 計測ユニット
30 コンピュータ
11 接地検出部
12 傾斜角度/回転角速度検出部
13 加速度検出部
14 リンク角度検出部
21 判定部
22 算出部
23 設定値保持部
24 選択部
25 腰位置計測部
26 モータ
27 傾斜センサ
31 計測データ処理部
32 入力部
33 計測データ表示部
35 表示部
91 目標値パターン供給部
92 目標角度生成部
93 加算部
94 ドライバ
95 モータ
【特許請求の範囲】
【請求項1】
複数のリンク、及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置であって、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する、位置変動検出装置。
【請求項2】
前記所定方向における前記所定部位の位置を算出する第1位置算出部と、
前記ユーザーの前記脚が接地しているか否かを示す情報に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、
を備えることを特徴とする請求項1に記載の位置変動検出装置。
【請求項3】
前記検出値は、前記ユーザーの前記脚が接地しているか否かを示す値を更に含む、請求項1又は2に記載の位置変動検出装置であって、
前記所定方向における前記所定部位の位置を算出する第1位置算出部と、
前記検出装置から供給される前記検出値に基づいて、前記ユーザーの前記脚が接地しているか否かを判定する判定部と、
前記判定部による判定結果に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、
を備える。
【請求項4】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至3のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、前記所定部位を中心として前記リンクが回転する際に検出される角加速度と、前記リンクの変位に応じて前記検出装置が検出する加速度とに基づいて前記リンクの前記加速度を算出し、当該算出した加速度を積分する。
【請求項5】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至4のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する。
【請求項6】
前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至5のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部による前記所定部位の鉛直軸線に沿う高さの算出処理と、前記第1位置算出部による所定方向に沿う前記リンクの前記加速度の算出処理とは時間的に並列して実行される。
【請求項7】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至6のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、複数の前記リンクの各長さに応じた複数の設定値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の前記鉛直軸線に沿う高さを算出する。
【請求項8】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至7のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、複数の前記リンクの各長さを示す複数のリンク長値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の鉛直軸線に沿う高さを算出し、当該高さと鉛直方向に対して前記リンクが為す角度とに基づいて前記所定方向における前記所定部位の位置を算出する。
【請求項9】
前記治具は、ユーザーの脚の膝に対してトルクを与えることでユーザーの歩行を補助する歩行補助装置であることを特徴とする請求項1乃至8のいずれか一項に記載の位置変動検出装置。
【請求項10】
複数の前記リンクは、前記ユーザーの大腿骨に対応づけて配置された第1リンクと、前記ユーザーの脛骨に対応づけて配置された第2リンクとを含むことを特徴とする請求項1乃至9のいずれか一項に記載の位置変動検出装置。
【請求項11】
前記所定位置は、前記ユーザーの腰位置であることを特徴とする請求項1乃至10のいずれか一項に記載の位置変動検出装置。
【請求項12】
複数のリンク、及び検出装置を含むと共に、ユーザーの脚に対して装着される治具と、
前記治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置と、
を備える位置変動検出システムであって、
前記位置変動検出装置は、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する、位置変動検出システム。
【請求項13】
複数のリンク及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置の動作方法であって、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する、位置変動検出装置の動作方法。
【請求項1】
複数のリンク、及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置であって、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する、位置変動検出装置。
【請求項2】
前記所定方向における前記所定部位の位置を算出する第1位置算出部と、
前記ユーザーの前記脚が接地しているか否かを示す情報に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、
を備えることを特徴とする請求項1に記載の位置変動検出装置。
【請求項3】
前記検出値は、前記ユーザーの前記脚が接地しているか否かを示す値を更に含む、請求項1又は2に記載の位置変動検出装置であって、
前記所定方向における前記所定部位の位置を算出する第1位置算出部と、
前記検出装置から供給される前記検出値に基づいて、前記ユーザーの前記脚が接地しているか否かを判定する判定部と、
前記判定部による判定結果に応じて定まる前記第1位置算出部による算出結果に基づいて、前記所定部位の所定空間内の位置を算出する第2位置算出部と、
を備える。
【請求項4】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至3のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、前記所定部位を中心として前記リンクが回転する際に検出される角加速度と、前記リンクの変位に応じて前記検出装置が検出する加速度とに基づいて前記リンクの前記加速度を算出し、当該算出した加速度を積分する。
【請求項5】
前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至4のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する。
【請求項6】
前記所定部位の前記鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至5のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部による前記所定部位の鉛直軸線に沿う高さの算出処理と、前記第1位置算出部による所定方向に沿う前記リンクの前記加速度の算出処理とは時間的に並列して実行される。
【請求項7】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至6のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、複数の前記リンクの各長さに応じた複数の設定値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の前記鉛直軸線に沿う高さを算出する。
【請求項8】
前記所定部位の鉛直軸線に沿う高さを算出し、当該算出した高さに基づいて前記所定方向における前記所定部位の位置を算出する第1位置算出部を備える請求項1乃至7のいずれか一項に記載の位置変動検出装置であって、
前記第1位置算出部は、複数の前記リンクの各長さを示す複数のリンク長値、及び複数の前記リンク同士が為す角度に基づいて、前記所定部位の鉛直軸線に沿う高さを算出し、当該高さと鉛直方向に対して前記リンクが為す角度とに基づいて前記所定方向における前記所定部位の位置を算出する。
【請求項9】
前記治具は、ユーザーの脚の膝に対してトルクを与えることでユーザーの歩行を補助する歩行補助装置であることを特徴とする請求項1乃至8のいずれか一項に記載の位置変動検出装置。
【請求項10】
複数の前記リンクは、前記ユーザーの大腿骨に対応づけて配置された第1リンクと、前記ユーザーの脛骨に対応づけて配置された第2リンクとを含むことを特徴とする請求項1乃至9のいずれか一項に記載の位置変動検出装置。
【請求項11】
前記所定位置は、前記ユーザーの腰位置であることを特徴とする請求項1乃至10のいずれか一項に記載の位置変動検出装置。
【請求項12】
複数のリンク、及び検出装置を含むと共に、ユーザーの脚に対して装着される治具と、
前記治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置と、
を備える位置変動検出システムであって、
前記位置変動検出装置は、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する、位置変動検出システム。
【請求項13】
複数のリンク及び検出装置を含む治具をユーザーの脚に対して装着し、当該治具の前記検出装置から供給される検出値に基づいて前記ユーザーの所定部位の位置変動を検出する位置変動検出装置の動作方法であって、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、複数の前記リンク同士が為す角度に応じた値、及び鉛直方向に対する前記リンクの傾斜角度に応じた値を含む)に基づいて鉛直軸線に対して交差する所定方向における前記所定部位の位置を算出し、
前記検出装置から供給される前記検出値(当該検出値は、少なくとも、前記リンクの回転角加速度に応じた値、及び前記リンクの加速度に応じた値を含む)に基づいて前記所定方向に沿う前記リンクの加速度を算出し、当該加速度の積分に基づいて前記所定方向における前記所定部位の位置を算出する、位置変動検出装置の動作方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−191962(P2012−191962A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−55863(P2011−55863)
【出願日】平成23年3月14日(2011.3.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月14日(2011.3.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]