
位置復調装置、及び位置復調方法
【課題】磁気ヘッドの位置の特定精度を向上させる。
【解決手段】実施形態の位置復調装置は、復調手段と、位相補正手段と、位置復調手段と、を備える。復調手段は、媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する。位相補正手段は、第1の復調信号及び第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う。位置復調手段は、位相補正手段で補正された後の第1の復調信号、及び第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する。
【解決手段】実施形態の位置復調装置は、復調手段と、位相補正手段と、位置復調手段と、を備える。復調手段は、媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する。位相補正手段は、第1の復調信号及び第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う。位置復調手段は、位相補正手段で補正された後の第1の復調信号、及び第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、位置復調装置、及び位置復調方法に関する。
【背景技術】
【0002】
ハードディスクドライブ装置においては、アクチュエータアームを用いて、当該アクチュエータアームの先端に備え付けられたヘッドで、記録媒体に対して、データの記録等が行われている。記録媒体は、ユーザのデータを記録するためのデータ領域と、ヘッドの位置決め制御に用いられるデータが記録されるサーボ領域と、を有している。
【0003】
そして、ハードディスクドライブ装置では、ヘッドがサーボ領域を通過する際に、当該サーボ領域から読み出した信号に基づいて、当該ヘッドの位置が特定される。この特定された位置に基づいて、アームがヘッドの位置を調整することで、ヘッドが所望の位置に存在するよう制御することができる。
【0004】
このサーボ領域に記録されるパターンにはいくつかの種類が存在し、例えば、NULLサーボパターン、面積サーボパターン、及び位相サーボパターンなどが存在する。
【0005】
例えば、NULLサーボパターンにおいては、磁化パターンが異なる2つのブロックを備えており、当該2つのブロックから読み出された位置情報信号により、ヘッドの位置を特定できる。NULLサーボパターンは、2つのブロックで良いため、サーボ領域の面積を削減し、データ領域を確保することが容易となる。このようなNULLサーボパターンに関する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2002−516451号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、ハードディスクドライブ装置においては、サーボ領域パターンから読み出された位置情報に基づいてヘッドの位置を特定する際、従来技術を用いただけでは、正確にヘッドの位置を特定することは難しい。これは、ハードディスクドライブ装置のスペックや動作している状況等に起因して、読み出した信号とヘッドの位置との間で円滑な対応関係で結びつけるのは困難だからである。なお、これはNULLサーボパターンを用いて位置を復調する場合に限らず、他のサーボパターンを用いた場合にも言える。そこで、ハードディスクドライブ装置では、より正確にヘッドの位置を特定するために、読み出した信号に対する補正処理が必要となる。
【0008】
本発明は、上記に鑑みてなされたものであって、ヘッドの正確な位置を復調することを目的とした位置復調装置、及び位置復調方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
実施形態の位置復調装置は、復調手段と、位相補正手段と、位置復調手段と、を備える。復調手段は、媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する。位相補正手段は、第1の復調信号及び第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う。位置復調手段は、位相補正手段で補正された後の第1の復調信号、及び第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する。
【0010】
実施形態の位置復調装置は、復調手段と、位置復調手段と、を備える。復調手段は、媒体のサーボ領域に位置決めを行うために記録されたサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する。位置復調手段は、線形性を向上させる補正を行うために定められた係数と、復調手段で復調された後の第1の復調信号の絶対値と第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、ヘッドの位置を特定するための位置信号として出力する。
【図面の簡単な説明】
【0011】
【図1】図1は、実施形態にかかるディスク記憶装置の電気的ハードウェア構成を示すブロック図である。
【図2】図2は、実施形態にかかる磁気ディスクにおける、NULL復調の場合のバースト部のパターンの一例を示す図である。
【図3】図3は、実施形態にかかるRDC及びHDC内の位置の復調を行うための構成を示した図である。
【図4】図4は、実施形態にかかる復調信号Aのsin成分をX座標に、復調信号Bのsin成分をY座標に用いた場合に位相空間に形成されるベクトルを示した図である。
【図5】図5は、実施形態にかかる初期位相補正部の補正の概念を示した図である。
【図6】図6は、Sdの違いに基づくポジションリサージュの例を示した図である。
【図7】図7は、実施形態にかかるアジマス補正部の補正の概念を示した図である。
【図8】図8は、実施形態にかかる速度補正部の補正の概念を示した図である。
【図9】図9は、実施形態にかかるディスク記憶装置における、係数Gmの違いによる2次多項式(1)の演算結果を示した図である。
【図10】図10は、実施形態にかかるディスク記憶装置で、リニアリティの補正の対象として示したポジションリサージュの例を示した図である。
【図11】図11は、実施形態にかかるディスク記憶装置で、ポジションリサージュ上を分割した領域を位相平面の象限として示した説明図である。
【図12】図12は、実施形態にかかる復調信号B成分及び復調信号A成分に基づいて定められる、図11に示すポジションリサージュの領域毎の位置算出手法を説明した図である。
【図13】図13は、図10に示すポジションリサージュを表す場合に、図12に示す位置計算手法を適用した場合のリニアリティを示した図である。
【図14】図14は、図6(A)に示すポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。
【図15】図15は、図6(B)に示すポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。
【図16】図16は、図6(C)に示すポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。
【図17】図17は、本実施の形態にかかるディスク記憶装置における、磁気ヘッド122の位置を特定するための処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0012】
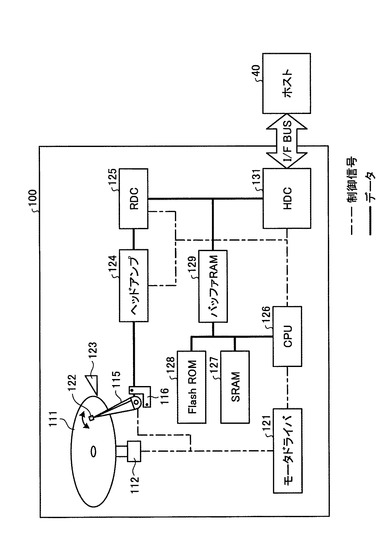
まず、本実施形態にかかる位置復調装置を適用したディスク記憶装置100について説明する。図1は、本実施形態にかかるディスク記憶装置100の電気的ハードウェア構成を示すブロック図である。
【0013】
図1において、磁気ディスク111は、円盤状の記録媒体であって、スピンドルモータ112により、回転軸を中心に所定の回転速度で回転される。スピンドルモータ112の回転は、モータドライバ121により駆動される。
【0014】
磁気ヘッド122は、それに備わる記録ヘッドおよび再生ヘッドにより、磁気ディスク111に対してデータの書き込みや読み出しを行う。また、磁気ヘッド122は、アクチュエータアーム115の先端にあって、モータドライバ121によって駆動されるボイスコイルモータ(VCM)116により、磁気ディスク111の半径方向に移動される。磁気ディスク111の回転が停止しているときなどは、磁気ヘッド122は、ランプ123上に退避される。
【0015】
ヘッドアンプ124は、磁気ヘッド122が磁気ディスク111から読み取った信号を増幅して出力し、RDC(Read Write Channel)125に供給する。また、ヘッドアンプ124は、RDC125から供給された、磁気ディスク111にデータを書き込むための信号を増幅して、磁気ヘッド122に供給する。
【0016】
RDC125は、後述するHDC131から供給される、磁気ディスク111に書き込むためのデータをコード変調してヘッドアンプ124に供給する。また、RDC125は、磁気ディスク111から読み取られヘッドアンプ124から供給された信号をコード復調してディジタルデータとしてHDC131へ出力する。
【0017】
CPU126には、動作用メモリであるSRAM(Random Access Memory)127、不揮発性メモリであるFlash ROM(Read Only Memory)128および一時記憶用のバッファRAM129が接続されている。このCPU126は、Flash ROM128および磁気ディスク111に予め記憶されたファームウェアに従って、このディスク記憶装置100の全体的な制御を行う。
【0018】
HDC(Hard Disk Controller)131は、I/Fバスを介してホストコンピュータ(ホスト)40との間で行われるデータの送受信の制御や、バッファRAM129の制御、ならびに、記録データに対するデータの誤り訂正処理などを行う。また、バッファRAM129は、ホストコンピュータ40との間で送受信されるデータのキャッシュとして用いられる。
【0019】
次に、磁気ディスク111の詳細について説明する。磁気ディスク111は、ユーザのデータを記録するデータ領域と、サーボ情報等を記憶するサーボ領域と、を備えている。当該サーボ領域には、回転中心から半径方向に円弧状に延びるサーボパターンが記録されている。サーボパターンは、磁気ヘッド122を位置決めするために用いられるデータである。
【0020】
磁気ディスク111は、金属又はガラス製の円盤(ディスク)状の基板に磁性膜を形成した記憶媒体である。磁気ディスク111へデータの記録を行う場合には、磁気ディスク111のデータを記録する記録領域に、磁気ヘッド122から磁界をかけ、表面上の磁性体の磁化状態を変化させることによってデータを記録する。また、磁気ディスク111からデータを読み出して再生する場合には、再生対象となる磁気ディスク111上の記録領域に磁気ヘッド122を移動させ、磁気ディスク111の磁性体の磁化状態を読み取ってデータを再生する。なお、磁気ディスク111の記録方式は、垂直磁気記録方式、水平磁気記録方式のいずれであってもよい。
【0021】
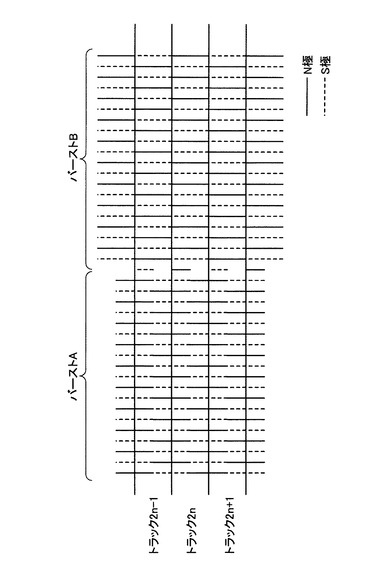
本実施形態では、磁気ヘッド122の位置を特定するための手法として、NULL復調を用いるものとする。サーボ領域内のサーボパターンは、プリアンブル部と、SM(サーボ・マーク)部と、グレイコード部と、バースト部と、を有する構成とする。プリアンブル部は、サーボパターンの先頭部分に相当し、本実施形態では周期4Tの領域とする。バースト部は、各トラックにおいてトラック中心から磁気ヘッド122のオフセット位置を検出するための領域である。NULL復調を用いる場合、バースト部は、2つのブロック(以下、NULLパターンと称す)を有する。また、バースト部は、本実施形態では周期8Tの領域とする。このようにプリアンブル部の周期を4Tとし、バースト部の周期を8Tとした場合、周波数が2倍になる。このため、本実施形態にかかるディスク記憶装置100のように、NULL復調を用いた場合、プリアンブル部の初期位相と、バースト部のNULLパターンと、の間の当該周波数の違いに基づく補正が必要となる。
【0022】
次に、磁気ディスク111のバースト部について具体的に説明する。図2は、磁気ディスク111における、NULL復調の場合のバースト部のパターンの一例を示す図である。図2に示すように、バースト部には、2相のNULLパターンが形成されている。図2に示すように、NULLパターンは、N極とS極が交互に配置されている。このため、当該NULLパターンを磁気ヘッド122のリードコアでアクセスすることで、このN極及びS極で形成される周期で変化する波形の信号を読み出すことができる。
【0023】
本実施形態では、2相のNULLパターンとして、位置情報信号PosAのためのバーストA、及び位置情報信号PosAと位相が90度ずれた位置情報信号PosBのためのバーストBが記録される。つまり、図2に示すように、バーストAとバーストBとでは、トラックの間隔が半分ずれている。このため、磁気ヘッド122によりバーストAから読み出された信号と、バーストBから読み出された信号と、では波形の振幅が異なる。そこで、本実施形態にかかるディスク記憶装置100では、バーストAとバーストBの信号の波形の振幅の違いから、磁気ヘッド122のリードコアのオフセット位置(以下、位置とも示す)を特定できる。
【0024】
本実施形態にかかるディスク記憶装置100では、バースト部に記録された位置情報信号PosA、位置情報信号PosBに対して、DFT(Discrete Fourier Transform)による演算で得られた復調信号に対して、補正を行った後、補正後の復調信号から、検出されたトラック番号のトラック中心からの磁気ヘッド122の位置信号(オフセット位置を特定可能な信号)を復調する。
【0025】
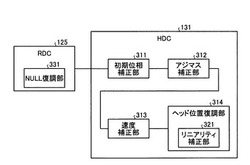
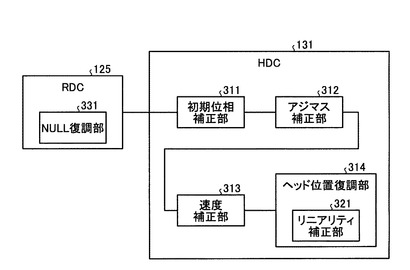
次に、位置を復調するための構成について説明する。図3は、RDC125、及びHDC131内の、位置の復調を行うための構成を示した図である。
【0026】
RDC125は、NULL復調部331を備える。NULL復調部331は、磁気ディスク111のサーボ領域に記録されたNULLサーボパターンを磁気ヘッド122が読み出した位置情報信号PosA、PosBに対してDFT(Discrete Fourier Transform)演算を行う。そして、NULL復調部331は、DFT演算結果として、復調信号A(第1の復調信号)と、復調信号B(第2の復調信号)と、を復調する。復調信号A、及び復調信号Bは、互いに90度の位相差を有している。なお、復調により得られた復調信号A、及び復調信号Bは、それぞれsin成分及びcos成分を含むベクトルとして示される。
【0027】
従来の磁気ディスク装置では、復調信号Aのsin成分をX座標に、復調信号Bのsin成分をY座標に用いることで、位相平面に表したベクトルの方向から、位相角θを得ることができていた。そして、当該位相角θから、磁気ヘッド122のオフセット位置が特定されていた。このオフセット位置を特定するために用いる、復調信号Aのsin成分、及び復調信号Bのsin成分について説明する。
【0028】
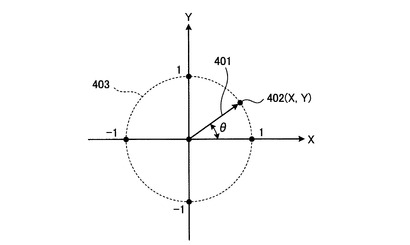
図4は、復調信号Aのsin成分をX座標に、復調信号Bのsin成分をY座標に割り当てた上で位相空間に表したベクトルを示した図である。図4に示す位相空間では、任意のタイミングでサンプリングされた(復調信号Aのsin成分、復調信号Bのsin成分)を位相空間にプロットすることで、ベクトル401の頂点402が得られる。なお、サンプリングを抽出するタイミングは、例えば2π当たり8サンプルで、6サイクル(12π)分行うなどが考えられる。
【0029】
そして、ベクトル401は、磁気ヘッド122が半径方向に一定速度で移動した場合の変化に伴い、破線で示す円上を左回りに回転する。ベクトル401の頂点402の描く円403の軌跡は、磁気ヘッド122の半径方向に移動して得られた(復調信号Aのsin成分、復調信号Bのsin成分)をサンプリング保持する。そして、サンプリング保持した結果を位相空間にプロットすることで、ポジションリサージュが得られる。
【0030】
ポジションリサージュは、復調信号A、Bが正弦波形の場合、図4に示すような円を描く。しかしながら、実際に得られた復調信号A、Bを用いてポジションリサージュを描いた場合、様々な歪みが生じている。例えば、ピーク部分で飽和してひずみが生じることから正弦波形とはならず、ポジションリサージュも、図4の破線で示すような円形とならず、コーナー部分にアールが付いた矩形形状に変形することもある。そこで、本実施形態にかかる磁気ディスク装置100では、復調信号A、Bが適切なポジションリサージュを描くよう、様々な補正を行うこととした。
【0031】
本実施形態では、HDC131内で行われる各種補正の概念について、ポジションリサージュを用いて説明する。なお、以下に示すポジションリサージュは、説明を容易にするために例として示したものであり、ディスク記憶装置100で復調信号A、Bの補正を行う際、実際にポジションリサージュを生成する必要はない。
【0032】
HDC131は、初期位相補正部311と、アジマス補正部312と、速度補正部313と、ヘッド位置復調部314と、を備える。そして、磁気ヘッド122がサーボ領域を通過する際、HDC131が、上述した構成で、RDC125から入力された復調信号に対して様々な補正を行った後、磁気ヘッド122の位置信号を復調する。
【0033】
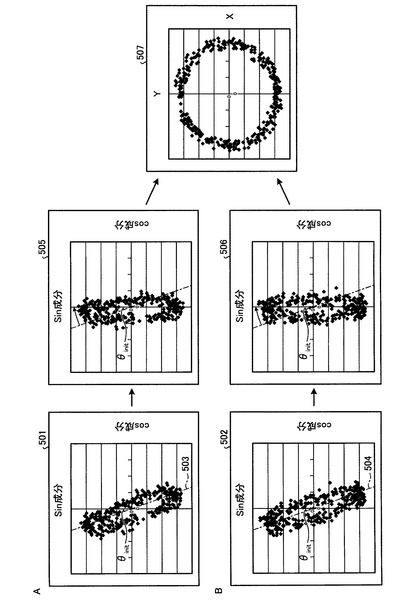
初期位相補正部311は、DFT演算で得られた復調信号A、Bのそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う。図5は、初期位相補正部311の補正の概念を示した図である。図5に示すように、復調信号Aのsin成分及びcos成分を用いて、位相平面上にサンプリングすると、グラフ501に示すようなリサージュ図形が得られる。また、復調信号Bのsin成分及びcos成分を用いて、位相平面上にサンプリングすると、グラフ502に示すようなリサージュ図形が得られる。
【0034】
ところで、従来技術においては、上述したように復調信号Aのsin成分、及び復調信号Bのsin成分のみを用いて、位相角θを求めていた。しかしながら、グラフ501及びグラフ502に示すように、リサージュ図形は楕円に似た形状となり、このグラフ501の楕円形状の長径503、及びグラフ502の楕円形状の長径504は、Y軸と比べて角度θinitだけ傾いている。この角度θinitにより正確に磁気ヘッド122の位置を特定できない可能性もある。そこで、本実施形態にかかる初期位相補正部311は、位相角θを算出する前に、当該傾きを修正する補正を行うこととした。
【0035】
本実施形態にかかる初期位相補正部311は、復調信号A及び復調信号Bのそれぞれを位相平面上で表したベクトルに対して、所定の角度θinit回転させる回転行列を掛けることで補正を行う。図5のグラフ505が、初期位相補正部311により所定の角度θinitを回転する補正を行った後の復調信号Aを示したものである。また、図5のグラフ506が、初期位相補正部311により所定の角度θinit回転する補正を行った後の復調信号Bを示したものである。なお、所定の角度θinitは、復調信号A及び復調信号Bのそれぞれのリサージュ図形と座標軸Yとの間の傾きを修正するために予め定められた角度とする。この所定の角度θinitは、ディスク記憶装置によって異なり、実測により定められるため、具体的な値の説明を省略する。
【0036】
そして、本実施形態にかかるディスク記憶装置100では、図5のグラフ507に示すように補正した後の復調信号Aのsin成分がX座標に、補正した後の復調信号Bのsin成分がY座標に割り当てられる。これにより形成される位相平面では、ベクトルの方向から、初期位相補正部311により補正がなされた後の位相角θが得られる。
【0037】
このように、本実施形態においては、復調信号A、Bに対して、所定の角度θinit回転する補正を行うこととした。当該補正を行った後の復調信号A、Bを用いて、磁気ヘッド122のオフセット位置を示す位置信号を復調することで、位置の特定精度を向上させることができる。
【0038】
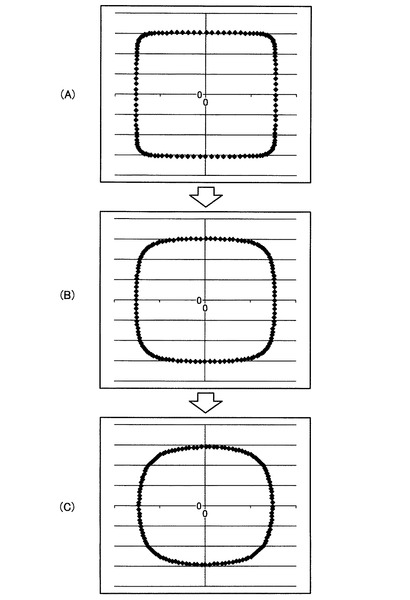
ところで、ポジションリサージュは、条件によっては円形とならず、コーナー部分にアールが付いた矩形形状に変形する可能性もあると説明した。この変形は、サーボ・トラック・ライタ(STW)のトラックピッチに対する、磁気ヘッド122のリードコア幅の比率により生じる。本実施形態ではSd=(リードコア幅)/(STWのトラックピッチ)とする。次に、Sdの違いに基づくポジションリサージュについて説明する。
【0039】
図6は、Sdの違いに基づくポジションリサージュの例を示した図である。図6の(A)は、Sd=0.14の場合のポジションリサージュを示し、図6(B)は、Sd=0.18の場合のポジションリサージュを示し、図6(C)は、Sd=0.22の場合のポジションリサージュを示している。図6の(A)〜(C)に示すように、Sdが大きくなるほど、ポジションリサージュが円に近づく。換言すると、磁気ヘッド122のリードコア幅が広くなる、又はSTWのトラックピッチが狭くなるほど、ポジションリサージュが円に近づくことになる。しかしながら、STWのトラックピッチが狭いほど、磁気ヘッド122の位置特定の精度の向上が必要となる。このため、磁気ヘッド122の位置特定の精度と、STWの性能と、のバランスに基づいてSTWのトラックピッチ等が決定されるものとする。
【0040】
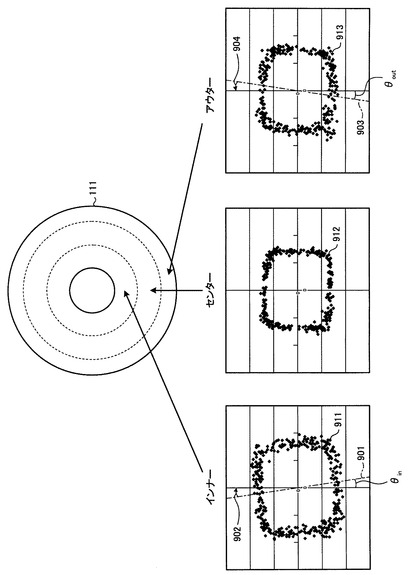
また、本実施形態では、磁気ディスク111を、回転中心から半径方向(内外方向)に対して所定の間隔毎に、インナー、センター、及びアウターの3つのゾーンに分割する。なお、本実施形態では、所定の間隔毎としたが、実施の態様に応じて任意の間隔でよい。
【0041】
そして、アジマス補正部312は、復調信号A、Bのそれぞれを位相平面上で表したベクトルに対して、復調信号A、Bの元となる位置情報信号PosA、PosBの読み出し先のゾーン毎に、異なる角度で傾ける補正を行う。図7は、アジマス補正部312の補正の概念を示した図である。図7に示す例では、ポジションリサージュのコーナー部分にアールが付いた矩形形状の場合とする。なお、図7に示すポジションリサージュが矩形形状で、図5のポジションリサージュと形状が異なるが、これは説明を容易にするためとする。本実施形態では、初期位相補正部311により補正された後の復調信号A、Bに対して、アジマス補正部312が補正する。
【0042】
図7に示すように、アジマス補正部312による補正の前のポジションリサージュは、インナーのポジションリサージュ911、センターのポジションリサージュ912、アウターのポジションリサージュ913となる。
【0043】
図7に示すように、ゾーン毎に矩形形状のポジションリサージュの傾きが異なる。インナーでは、軸901に示すように角度θinでY軸から傾いており、アウターでは、軸903に示すように、インナーと逆方向に角度θoutでY軸から傾いている。
【0044】
そこで、アジマス補正部312は、インナーの復調信号A、Bに対して、矢印902が示す方向に角度θinのみ回転させる回転行列を掛ける。一方、アジマス補正部312は、アウターの復調信号A、Bに対して、矢印904が示す方向に角度θoutのみ回転させる回転行列を掛ける。これにより、ゾーン毎に異なっていた矩形形状のポジションリサージュの傾きが修正されることになる。これにより、磁気ヘッド122の位置の特定の際の精度を向上させることができる。なお、角度θin及び角度θoutは、ディスク記憶装置によって異なり、実測により定められる値となるため、具体的な値については説明を省略する。
【0045】
そして、アジマス補正部312が補正を行った後、速度補正部313が、補正した後の復調信号A、Bに対して補正を行う。
【0046】
次に、アクチュエータアーム115がシークしている場合におけるポジションリサージュの変化について説明する。なお、説明を容易にするために、アクチュエータアーム115を用いたシークが行われていない場合には、ポジションリサージュが円となる例について説明する。
【0047】
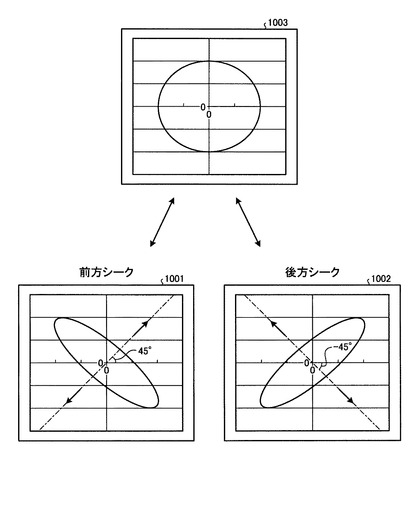
本実施形態にかかるディスク記憶装置100では、アクチュエータアーム115を用いてシークを行う場合、アクチュエータアーム115の移動速度に応じて、ポジションリサージュが楕円となる。この楕円の形状は、前方シークを行うのか、後方シークを行うのかにより変化する。ポジションリサージュが楕円となる場合、位相角θがリニアに変化しないため、位置の特定精度が低下する。そこで、本実施形態にかかるディスク記憶装置100の速度補正部313は、ポジションリサージュの楕円形状を、円にする補正を行う。
【0048】
図8は、速度補正部313の補正の概念を示した図である。図8のグラフ1001は、前方シークにより楕円形状となったポジションリサージュを示しており、グラフ1002は後方シークにより楕円形状となったポジションリサージュを示している。図8に示すように、前方シークの場合は、45度の方向で短径となる楕円形状であり、後方シークの場合は、−45度の方向で短径となる楕円形状とする。そこで、本実施形態にかかる速度補正部313は、前方シークの場合、復調信号A、Bを位相平面上で表したベクトルに対して、45度回転する回転行列を掛けた後、X軸方向に1.5倍する拡大行列を掛け、最後に−45度回転する回転行列を掛ける。これにより、楕円形状のポジションリサージュに対して、短径方向を長くする補正がなされたことになり、図8の1003に示すような円形状に補正されることになる。なお、後方シークの場合も同様の趣旨の処理を行うことで、円形状に補正できる。
【0049】
速度補正部313による補正により、アクチュエータアーム115の移動速度がある場合であっても、リードコアの位置特定の際のリニアリティを向上させることができる。
【0050】
ヘッド位置復調部314は、リニアリティ補正部321を備え、各種補正手法で補正された後の復調信号A、Bに基づいて、磁気ヘッド122のリードコアの位置信号を復調する。本実施形態にかかるヘッド位置復調部314は、補正された後の復調信号A、Bを入力し、復調信号A、Bにより位相平面に形成されるベクトルの方向を示す位相角θを磁気ヘッド122の位置信号として出力する。これにより、磁気ヘッド122の位置が特定できる。
【0051】
リニアリティ補正部321は、ヘッド位置復調部314が位置の復調を行う際、復調信号A、Bの変化に基づいて、リードコアとして特定される位置(位相角θ)の変化のリニアリティを向上させる補正を行う。つまり、ポジションリサージュが円の場合には、リードコアとして特定される位置(位相角θ)のリニアリティが高いために、リードコアのヘッドとして特定される位置の精度が高くなる。しかしながら、ポジションリサージュが矩形に近づくにつれてリードコアとして特定される位置(位相角θ)のリニアリティが低くなり、リードコアのヘッドの位置の特定精度が低くなる。そこで、本実施形態ではリニアリティを向上させる補正を行うこととした。
【0052】
ところで、従来、ポジションリサージュが円の場合、磁気ヘッド122のリードコアの位置(位相角θ)は、arctan(x)を用いて算出されていた。なお、この変数xは、|復調信号B成分|≦|復調信号A成分|の場合、変数x=|復調信号B成分|/|復調信号A成分|とし、|復調信号B成分|>|復調信号A成分|の場合、x=|復調信号A成分|/|復調信号B成分|とする。なお、復調信号A成分とは、復調信号Aのsin成分とし、復調信号B成分は、復調信号Bのsin成分とする。しかしながら、ポジションリサージュが円でなく、矩形の場合、arctan(x)で算出すると位置の検出精度が低くなる。
【0053】
そこで、本実施形態にかかるヘッド位置復調部314は、以下の2次多項式(1)を用いて算出された値に基づいて、リードコアを示す位相角θ、換言すればリードコアの位置として復調することとした。
(1−Gm)x+Gmx2……(1)
Gm:リニアリティを向上させる補正を行うために定められた係数
【0054】
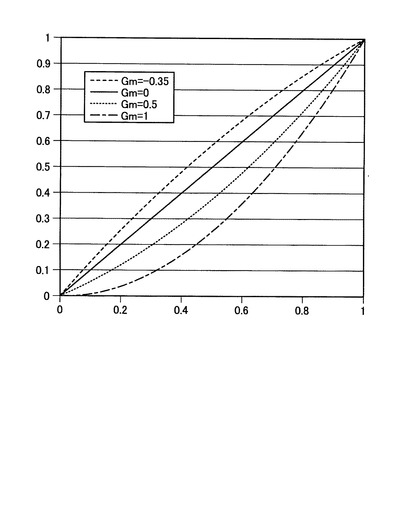
図9は、係数Gmの違いによる2次多項式(1)の演算結果を示した図である。なお、ヘッド位置復調部314が、係数Gm=−0.35を用いて位置を復調した場合、arctan(x)を用いたのとほぼ同様の、リードコアの位置(位相角θ)が得られる。図9に示すように、係数Gm=−0.35から係数Gmの値を大きくさせるにつれて、arctan(x)を用いた場合と比べてより下向きに湾曲したカーブとなり、リニアリティの補正の度合いが大きくなることが確認できる。このように、本実施形態にかかるヘッド位置復調部314では、式(1)を用いて算出された値を位相角θとすることで、arctan(x)を用いた場合と比べて位置特定の際のリニアリティを向上させることができる。なお、係数Gmは、ポジションリサージュの形状、つまり、磁気ヘッド122のリードコア幅、及びSTWのトラックピッチに基づいて定められる。
【0055】
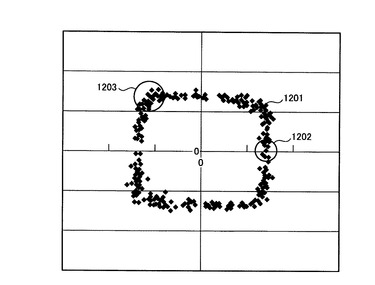
図10は、リニアリティの補正の対象として示したポジションリサージュの例を示した図である。図10に示すポジションリサージュにおいて、0度、90度、180度、270度の直交する位置でリサージュ波形がフラットとなり、45度方向のコーナー部で丸みをもつことになる。次に、図10に示すポジションリサージュ1201に対して、上記の2次多項式を用いた場合について説明する。
【0056】
ところで、2次多項式(1)を用いる際に、復調信号A成分、及び復調信号B成分は絶対値である必要がある。さらに、2次多項式(1)は、xが0〜1の場合に用いる場合には有用であるが、復調信号A、Bを位相平面上で示したベクトルが0〜2πで変化する場合については考慮されていない。そこで、本実施形態では、状況に応じて適切な値が求められるよう、上述した2次多項式(1)を拡張する必要がある。
【0057】
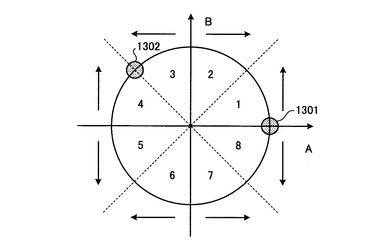
図11は、ポジションリサージュ上で、変数xとなる(|復調信号B成分|/|復調信号A成分|)またはその逆数(|復調信号A成分|/|復調信号B成分|)の違いに基づいて分割された領域を、位相平面の象限として示した説明図である。図11に示す位相平面では、45度間隔で左回りに第1象限、第2象限、第3象限、第4象限、第5象限、第6象限、第7象限及び第8象限の8象限に分割している。
【0058】
図12は、実施形態にかかる復調信号B成分及び復調信号A成分に基づいて定められる、図11に示すポジションリサージュの領域毎の位置算出手法を説明した図である。図12に示す、領域毎に異なる位置算出手法を用いて、磁気ヘッド122のリードコアの位置(位相角)を復号する。図12に示すように、復調信号A成分が0より大きいか否か、復調信号B成分が0より大きいか否か、及び|復調信号B成分|<|復調信号A成分|が成り立つか否かの組み合わせにより、領域1〜8が決定される。そして、領域に応じて変数xが、|復調信号B成分|/|復調信号A成分|または|復調信号A成分|/|復調信号B成分|に決定される。さらに、領域に応じて位置計算手法が特定される。なお、図12に示すfunc(x)は以下に示す2次多項式(2)とする。
func(x)=((1−Gm)x+Gmx2)×0.25……(2)
【0059】
このように本実施形態にかかるヘッド位置復調部314では、特定された領域に応じて、位置計算手法を異ならせることで、2次多項式を拡張した。
【0060】
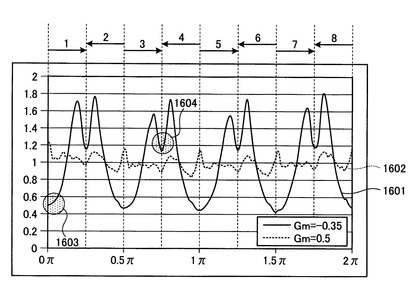
次に、当該計算手法を用いた場合の位置を特定する際のリニアリティ(線形性)について説明する。図13は、図10に示すポジションリサージュを表す場合に、上述した位置計算手法を適用した場合のリニアリティを示した図である。図13に示す例では、線1601が、係数Gm=−0.35、換言すればarctan(x)を適用した場合のリニアリティを示しており、線1602が係数Gm=0.5を適用した場合のリニアリティを示している。図13に示すように、係数Gm=0.5は、係数Gm=−0.35と比べて、0〜2πの範囲で1に近似する値を保持している。このため、係数Gm=0.5は、係数Gm=−0.35と比べて、高いリニアリティを保持している。
【0061】
具体的には、図10に示すポジションリサージュにおいて、範囲1202では、直線を描くため位置の復調感度が低く、範囲1203では弧を描くため位置の復調感度が高くなる。また、図10の範囲1202が、図11に示す位相平面上の範囲1301に対応し、図10の範囲1203が、図11に示す位相平面上の範囲1302に対応する。従って、図13に示すグラフ上において、係数Gm=−0.35の場合、図10の範囲1202が範囲1603に対応し、図10の範囲1203が範囲1604に対応することになる。図13に示すように、ポジションリサージュの範囲1202のような復調感度が低い箇所では、係数Gm=−0.35のリニアリティは低くなるが、係数Gm=0.5であれば高いリニアリティを確保できる。また、ポジションリサージュの範囲1203のような復調感度が高い箇所であっても、係数Gm=−0.35と比べて、係数Gm=0.5の方が高いリニアリティを確保できる。
【0062】
このように図10に示すポジションリサージュを表す場合、ヘッド位置復調部314は、係数Gm=0.5を代入した図12に示す位置計算手法を用いて、磁気ヘッド122のリードコアの位置信号を復調することで高い精度で位置を特定することができる。
【0063】
このように、本実施形態にかかるヘッド位置復調部314は、上述した補正手法で補正された後の復調信号A成分の絶対値と復調信号B成分の絶対値との間の比率を示した変数xと、リニアリティを向上させる補正を行うために定められた係数Gmと、による2次多項式を用いて算出した位相角θを、磁気ヘッド122のリードコアの位置信号として出力する。具体的には図12に示す位置計算手法を用い、Sdに適した係数Gmを用いることで、位置の特定精度を向上できる。なお、係数Gmは、上述した条件によって異なり、実測により定められる値となるため、具体的な値については説明を省略する。
【0064】
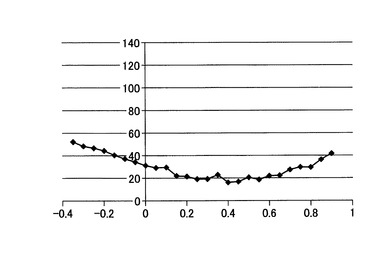
次に、各ポジションリサージュから得られるリニアリティのばらつき度(確率密度)について説明する。図14は、Sd=0.14で図6(A)に示すようなポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。縦軸がリニアリティのばらつき具合を示し、横軸がGmを示している。図14に示すリニアリティのばらつき具合のうち最も小さい値が最適値となる。図14においては、ばらつき度が一番小さくなるGm(図14においては0.4)を用いることで、精度の良くリードコアの位置を得られる。
【0065】
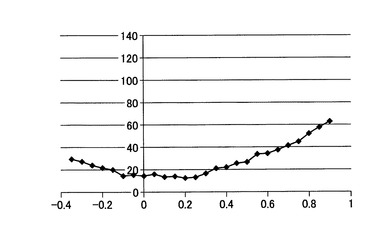
次に、図15は、Sd=0.18で図6(B)に示すようなポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。図15においては、ばらつき度が一番小さいGm=0.2を用いることで、精度良くリードコアの位置を得られる。
【0066】
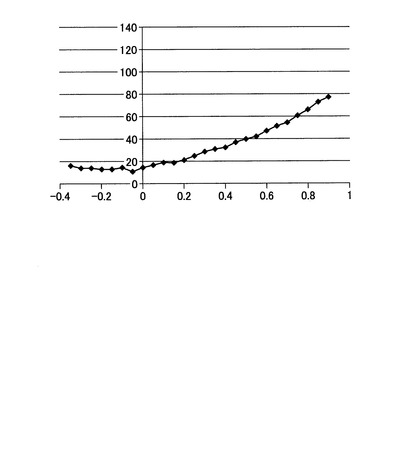
図16は、Sd=0.22で図6(C)に示すようなポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。図16においては、ばらつき度が一番小さいGm=−0.05を用いることで、精度良くリードコアの位置を得られる。
【0067】
図14〜図16に示すように、ポジションリサージュが円から矩形に近づくにつれて、リニアリティのばらつき具合が小さくなり、リードコアの位置の精度が向上することを把握できる。しかしながら、ポジションリサージュが矩形に近い場合でも、本実施形態にかかるリニアリティの補正を行うことで、リニアリティのばらつき具合を比較的小さくすることが可能であることが確認できる。このため、位置の精度と、STWのスペックと、を考慮した上で、STWのトラックピッチを決定すればよい。
【0068】
なお、リニアリティ補正部321で示したリニアリティを向上させる補正は、NULL復調を用いた場合に制限するものではなく、他の復調方式に対して適用可能である。例えば、面積復調を用いてヘッドの位置を特定するディスク記憶装置に対しても適用できる。
【0069】
本実施形態においては、ヘッド位置復調部314が磁気ヘッド122の位置を特定する際に、2次多項式(2)を用いたことで位置特定の精度を向上させる。また、2次多項式は、3次以上の多項式と比べて演算が容易にできるため、処理負担を軽減することができる。
【0070】
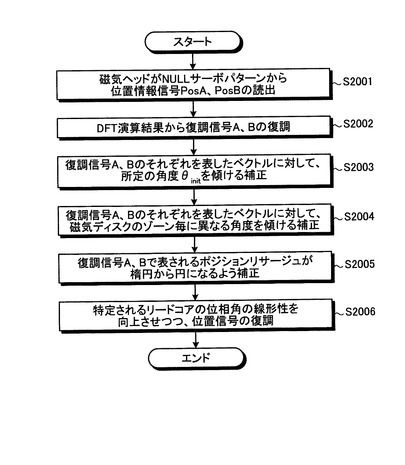
次に、本実施の形態にかかるディスク記憶装置100における、磁気ヘッド122の位置を特定するための処理について説明する。図17は、本実施の形態にかかるディスク記憶装置100における上述した処理の手順を示すフローチャートである。
【0071】
まず、磁気ヘッド122のリードコアが、NULLサーボパターンから位置情報信号PosA、及びPosBを読み出す(ステップS2001)。
【0072】
次に、NULL復調部331は、位置情報信号PosA、PosBに対してDFT(Discrete Fourier Transform)演算を行い、復調信号A、Bを復調する(ステップS2002)。
【0073】
その後、初期位相補正部311は、復調信号A、Bのそれぞれを位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う(ステップS2003)。
【0074】
次に、アジマス補正部312は、復調信号A、Bのそれぞれを位相平面上で表したベクトルに対して、復調信号A、Bの元となる位置情報信号PosA、PosBが含まれていたゾーン毎に異なる角度で傾ける補正を行う(ステップS2004)。
【0075】
そして、速度補正部313が、復調信号A、Bで表されるポジションリサージュの楕円形状が、円になるよう補正を行う(ステップS2005)。
【0076】
その後、ヘッド位置復調部314が、リニアリティ補正部321を用いて復調信号A、Bに基づいて特定されるリードコアの位相角のリニアリティを向上させつつ、位置信号を復調する(ステップS2006)。
【0077】
上述した処理手順により、本実施形態にかかるディスク記憶装置100では、HDC131内で各種補正を行った後に、位置信号が復調される。
【0078】
なお、本実施形態では、初期位相補正、アジマス補正、速度補正、及びリニアリティ補正の順で補正を行ったが、補正の順序を制限するものではなく任意の順序で行っても良い。また、初期位相補正、アジマス補正、速度補正、及びリニアリティ補正を全て行う必要もなく、1つ以上の補正が行われていれば、磁気ヘッド122のオフセット位置の特定精度を向上させることができる。さらに、ほかの補正と組み合わせても良い。
【0079】
本実施形態にかかるディスク記憶装置100によれば、上述した補正手法のいずれか1つ以上を用いて復調信号A、Bの補正を行うことで、磁気ヘッド122の位置の特定精度を向上させることができる。
【0080】
本発明の実施形態を説明したが、この実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0081】
100…ディスク記憶装置、122…磁気ヘッド、311…初期位相補正部、312…アジマス補正部、313…速度補正部、314…ヘッド位置復調部、321…リニアリティ補正部、331…NULL復調部
【技術分野】
【0001】
本発明の実施形態は、位置復調装置、及び位置復調方法に関する。
【背景技術】
【0002】
ハードディスクドライブ装置においては、アクチュエータアームを用いて、当該アクチュエータアームの先端に備え付けられたヘッドで、記録媒体に対して、データの記録等が行われている。記録媒体は、ユーザのデータを記録するためのデータ領域と、ヘッドの位置決め制御に用いられるデータが記録されるサーボ領域と、を有している。
【0003】
そして、ハードディスクドライブ装置では、ヘッドがサーボ領域を通過する際に、当該サーボ領域から読み出した信号に基づいて、当該ヘッドの位置が特定される。この特定された位置に基づいて、アームがヘッドの位置を調整することで、ヘッドが所望の位置に存在するよう制御することができる。
【0004】
このサーボ領域に記録されるパターンにはいくつかの種類が存在し、例えば、NULLサーボパターン、面積サーボパターン、及び位相サーボパターンなどが存在する。
【0005】
例えば、NULLサーボパターンにおいては、磁化パターンが異なる2つのブロックを備えており、当該2つのブロックから読み出された位置情報信号により、ヘッドの位置を特定できる。NULLサーボパターンは、2つのブロックで良いため、サーボ領域の面積を削減し、データ領域を確保することが容易となる。このようなNULLサーボパターンに関する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2002−516451号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、ハードディスクドライブ装置においては、サーボ領域パターンから読み出された位置情報に基づいてヘッドの位置を特定する際、従来技術を用いただけでは、正確にヘッドの位置を特定することは難しい。これは、ハードディスクドライブ装置のスペックや動作している状況等に起因して、読み出した信号とヘッドの位置との間で円滑な対応関係で結びつけるのは困難だからである。なお、これはNULLサーボパターンを用いて位置を復調する場合に限らず、他のサーボパターンを用いた場合にも言える。そこで、ハードディスクドライブ装置では、より正確にヘッドの位置を特定するために、読み出した信号に対する補正処理が必要となる。
【0008】
本発明は、上記に鑑みてなされたものであって、ヘッドの正確な位置を復調することを目的とした位置復調装置、及び位置復調方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
実施形態の位置復調装置は、復調手段と、位相補正手段と、位置復調手段と、を備える。復調手段は、媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する。位相補正手段は、第1の復調信号及び第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う。位置復調手段は、位相補正手段で補正された後の第1の復調信号、及び第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する。
【0010】
実施形態の位置復調装置は、復調手段と、位置復調手段と、を備える。復調手段は、媒体のサーボ領域に位置決めを行うために記録されたサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する。位置復調手段は、線形性を向上させる補正を行うために定められた係数と、復調手段で復調された後の第1の復調信号の絶対値と第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、ヘッドの位置を特定するための位置信号として出力する。
【図面の簡単な説明】
【0011】
【図1】図1は、実施形態にかかるディスク記憶装置の電気的ハードウェア構成を示すブロック図である。
【図2】図2は、実施形態にかかる磁気ディスクにおける、NULL復調の場合のバースト部のパターンの一例を示す図である。
【図3】図3は、実施形態にかかるRDC及びHDC内の位置の復調を行うための構成を示した図である。
【図4】図4は、実施形態にかかる復調信号Aのsin成分をX座標に、復調信号Bのsin成分をY座標に用いた場合に位相空間に形成されるベクトルを示した図である。
【図5】図5は、実施形態にかかる初期位相補正部の補正の概念を示した図である。
【図6】図6は、Sdの違いに基づくポジションリサージュの例を示した図である。
【図7】図7は、実施形態にかかるアジマス補正部の補正の概念を示した図である。
【図8】図8は、実施形態にかかる速度補正部の補正の概念を示した図である。
【図9】図9は、実施形態にかかるディスク記憶装置における、係数Gmの違いによる2次多項式(1)の演算結果を示した図である。
【図10】図10は、実施形態にかかるディスク記憶装置で、リニアリティの補正の対象として示したポジションリサージュの例を示した図である。
【図11】図11は、実施形態にかかるディスク記憶装置で、ポジションリサージュ上を分割した領域を位相平面の象限として示した説明図である。
【図12】図12は、実施形態にかかる復調信号B成分及び復調信号A成分に基づいて定められる、図11に示すポジションリサージュの領域毎の位置算出手法を説明した図である。
【図13】図13は、図10に示すポジションリサージュを表す場合に、図12に示す位置計算手法を適用した場合のリニアリティを示した図である。
【図14】図14は、図6(A)に示すポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。
【図15】図15は、図6(B)に示すポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。
【図16】図16は、図6(C)に示すポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。
【図17】図17は、本実施の形態にかかるディスク記憶装置における、磁気ヘッド122の位置を特定するための処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0012】
まず、本実施形態にかかる位置復調装置を適用したディスク記憶装置100について説明する。図1は、本実施形態にかかるディスク記憶装置100の電気的ハードウェア構成を示すブロック図である。
【0013】
図1において、磁気ディスク111は、円盤状の記録媒体であって、スピンドルモータ112により、回転軸を中心に所定の回転速度で回転される。スピンドルモータ112の回転は、モータドライバ121により駆動される。
【0014】
磁気ヘッド122は、それに備わる記録ヘッドおよび再生ヘッドにより、磁気ディスク111に対してデータの書き込みや読み出しを行う。また、磁気ヘッド122は、アクチュエータアーム115の先端にあって、モータドライバ121によって駆動されるボイスコイルモータ(VCM)116により、磁気ディスク111の半径方向に移動される。磁気ディスク111の回転が停止しているときなどは、磁気ヘッド122は、ランプ123上に退避される。
【0015】
ヘッドアンプ124は、磁気ヘッド122が磁気ディスク111から読み取った信号を増幅して出力し、RDC(Read Write Channel)125に供給する。また、ヘッドアンプ124は、RDC125から供給された、磁気ディスク111にデータを書き込むための信号を増幅して、磁気ヘッド122に供給する。
【0016】
RDC125は、後述するHDC131から供給される、磁気ディスク111に書き込むためのデータをコード変調してヘッドアンプ124に供給する。また、RDC125は、磁気ディスク111から読み取られヘッドアンプ124から供給された信号をコード復調してディジタルデータとしてHDC131へ出力する。
【0017】
CPU126には、動作用メモリであるSRAM(Random Access Memory)127、不揮発性メモリであるFlash ROM(Read Only Memory)128および一時記憶用のバッファRAM129が接続されている。このCPU126は、Flash ROM128および磁気ディスク111に予め記憶されたファームウェアに従って、このディスク記憶装置100の全体的な制御を行う。
【0018】
HDC(Hard Disk Controller)131は、I/Fバスを介してホストコンピュータ(ホスト)40との間で行われるデータの送受信の制御や、バッファRAM129の制御、ならびに、記録データに対するデータの誤り訂正処理などを行う。また、バッファRAM129は、ホストコンピュータ40との間で送受信されるデータのキャッシュとして用いられる。
【0019】
次に、磁気ディスク111の詳細について説明する。磁気ディスク111は、ユーザのデータを記録するデータ領域と、サーボ情報等を記憶するサーボ領域と、を備えている。当該サーボ領域には、回転中心から半径方向に円弧状に延びるサーボパターンが記録されている。サーボパターンは、磁気ヘッド122を位置決めするために用いられるデータである。
【0020】
磁気ディスク111は、金属又はガラス製の円盤(ディスク)状の基板に磁性膜を形成した記憶媒体である。磁気ディスク111へデータの記録を行う場合には、磁気ディスク111のデータを記録する記録領域に、磁気ヘッド122から磁界をかけ、表面上の磁性体の磁化状態を変化させることによってデータを記録する。また、磁気ディスク111からデータを読み出して再生する場合には、再生対象となる磁気ディスク111上の記録領域に磁気ヘッド122を移動させ、磁気ディスク111の磁性体の磁化状態を読み取ってデータを再生する。なお、磁気ディスク111の記録方式は、垂直磁気記録方式、水平磁気記録方式のいずれであってもよい。
【0021】
本実施形態では、磁気ヘッド122の位置を特定するための手法として、NULL復調を用いるものとする。サーボ領域内のサーボパターンは、プリアンブル部と、SM(サーボ・マーク)部と、グレイコード部と、バースト部と、を有する構成とする。プリアンブル部は、サーボパターンの先頭部分に相当し、本実施形態では周期4Tの領域とする。バースト部は、各トラックにおいてトラック中心から磁気ヘッド122のオフセット位置を検出するための領域である。NULL復調を用いる場合、バースト部は、2つのブロック(以下、NULLパターンと称す)を有する。また、バースト部は、本実施形態では周期8Tの領域とする。このようにプリアンブル部の周期を4Tとし、バースト部の周期を8Tとした場合、周波数が2倍になる。このため、本実施形態にかかるディスク記憶装置100のように、NULL復調を用いた場合、プリアンブル部の初期位相と、バースト部のNULLパターンと、の間の当該周波数の違いに基づく補正が必要となる。
【0022】
次に、磁気ディスク111のバースト部について具体的に説明する。図2は、磁気ディスク111における、NULL復調の場合のバースト部のパターンの一例を示す図である。図2に示すように、バースト部には、2相のNULLパターンが形成されている。図2に示すように、NULLパターンは、N極とS極が交互に配置されている。このため、当該NULLパターンを磁気ヘッド122のリードコアでアクセスすることで、このN極及びS極で形成される周期で変化する波形の信号を読み出すことができる。
【0023】
本実施形態では、2相のNULLパターンとして、位置情報信号PosAのためのバーストA、及び位置情報信号PosAと位相が90度ずれた位置情報信号PosBのためのバーストBが記録される。つまり、図2に示すように、バーストAとバーストBとでは、トラックの間隔が半分ずれている。このため、磁気ヘッド122によりバーストAから読み出された信号と、バーストBから読み出された信号と、では波形の振幅が異なる。そこで、本実施形態にかかるディスク記憶装置100では、バーストAとバーストBの信号の波形の振幅の違いから、磁気ヘッド122のリードコアのオフセット位置(以下、位置とも示す)を特定できる。
【0024】
本実施形態にかかるディスク記憶装置100では、バースト部に記録された位置情報信号PosA、位置情報信号PosBに対して、DFT(Discrete Fourier Transform)による演算で得られた復調信号に対して、補正を行った後、補正後の復調信号から、検出されたトラック番号のトラック中心からの磁気ヘッド122の位置信号(オフセット位置を特定可能な信号)を復調する。
【0025】
次に、位置を復調するための構成について説明する。図3は、RDC125、及びHDC131内の、位置の復調を行うための構成を示した図である。
【0026】
RDC125は、NULL復調部331を備える。NULL復調部331は、磁気ディスク111のサーボ領域に記録されたNULLサーボパターンを磁気ヘッド122が読み出した位置情報信号PosA、PosBに対してDFT(Discrete Fourier Transform)演算を行う。そして、NULL復調部331は、DFT演算結果として、復調信号A(第1の復調信号)と、復調信号B(第2の復調信号)と、を復調する。復調信号A、及び復調信号Bは、互いに90度の位相差を有している。なお、復調により得られた復調信号A、及び復調信号Bは、それぞれsin成分及びcos成分を含むベクトルとして示される。
【0027】
従来の磁気ディスク装置では、復調信号Aのsin成分をX座標に、復調信号Bのsin成分をY座標に用いることで、位相平面に表したベクトルの方向から、位相角θを得ることができていた。そして、当該位相角θから、磁気ヘッド122のオフセット位置が特定されていた。このオフセット位置を特定するために用いる、復調信号Aのsin成分、及び復調信号Bのsin成分について説明する。
【0028】
図4は、復調信号Aのsin成分をX座標に、復調信号Bのsin成分をY座標に割り当てた上で位相空間に表したベクトルを示した図である。図4に示す位相空間では、任意のタイミングでサンプリングされた(復調信号Aのsin成分、復調信号Bのsin成分)を位相空間にプロットすることで、ベクトル401の頂点402が得られる。なお、サンプリングを抽出するタイミングは、例えば2π当たり8サンプルで、6サイクル(12π)分行うなどが考えられる。
【0029】
そして、ベクトル401は、磁気ヘッド122が半径方向に一定速度で移動した場合の変化に伴い、破線で示す円上を左回りに回転する。ベクトル401の頂点402の描く円403の軌跡は、磁気ヘッド122の半径方向に移動して得られた(復調信号Aのsin成分、復調信号Bのsin成分)をサンプリング保持する。そして、サンプリング保持した結果を位相空間にプロットすることで、ポジションリサージュが得られる。
【0030】
ポジションリサージュは、復調信号A、Bが正弦波形の場合、図4に示すような円を描く。しかしながら、実際に得られた復調信号A、Bを用いてポジションリサージュを描いた場合、様々な歪みが生じている。例えば、ピーク部分で飽和してひずみが生じることから正弦波形とはならず、ポジションリサージュも、図4の破線で示すような円形とならず、コーナー部分にアールが付いた矩形形状に変形することもある。そこで、本実施形態にかかる磁気ディスク装置100では、復調信号A、Bが適切なポジションリサージュを描くよう、様々な補正を行うこととした。
【0031】
本実施形態では、HDC131内で行われる各種補正の概念について、ポジションリサージュを用いて説明する。なお、以下に示すポジションリサージュは、説明を容易にするために例として示したものであり、ディスク記憶装置100で復調信号A、Bの補正を行う際、実際にポジションリサージュを生成する必要はない。
【0032】
HDC131は、初期位相補正部311と、アジマス補正部312と、速度補正部313と、ヘッド位置復調部314と、を備える。そして、磁気ヘッド122がサーボ領域を通過する際、HDC131が、上述した構成で、RDC125から入力された復調信号に対して様々な補正を行った後、磁気ヘッド122の位置信号を復調する。
【0033】
初期位相補正部311は、DFT演算で得られた復調信号A、Bのそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う。図5は、初期位相補正部311の補正の概念を示した図である。図5に示すように、復調信号Aのsin成分及びcos成分を用いて、位相平面上にサンプリングすると、グラフ501に示すようなリサージュ図形が得られる。また、復調信号Bのsin成分及びcos成分を用いて、位相平面上にサンプリングすると、グラフ502に示すようなリサージュ図形が得られる。
【0034】
ところで、従来技術においては、上述したように復調信号Aのsin成分、及び復調信号Bのsin成分のみを用いて、位相角θを求めていた。しかしながら、グラフ501及びグラフ502に示すように、リサージュ図形は楕円に似た形状となり、このグラフ501の楕円形状の長径503、及びグラフ502の楕円形状の長径504は、Y軸と比べて角度θinitだけ傾いている。この角度θinitにより正確に磁気ヘッド122の位置を特定できない可能性もある。そこで、本実施形態にかかる初期位相補正部311は、位相角θを算出する前に、当該傾きを修正する補正を行うこととした。
【0035】
本実施形態にかかる初期位相補正部311は、復調信号A及び復調信号Bのそれぞれを位相平面上で表したベクトルに対して、所定の角度θinit回転させる回転行列を掛けることで補正を行う。図5のグラフ505が、初期位相補正部311により所定の角度θinitを回転する補正を行った後の復調信号Aを示したものである。また、図5のグラフ506が、初期位相補正部311により所定の角度θinit回転する補正を行った後の復調信号Bを示したものである。なお、所定の角度θinitは、復調信号A及び復調信号Bのそれぞれのリサージュ図形と座標軸Yとの間の傾きを修正するために予め定められた角度とする。この所定の角度θinitは、ディスク記憶装置によって異なり、実測により定められるため、具体的な値の説明を省略する。
【0036】
そして、本実施形態にかかるディスク記憶装置100では、図5のグラフ507に示すように補正した後の復調信号Aのsin成分がX座標に、補正した後の復調信号Bのsin成分がY座標に割り当てられる。これにより形成される位相平面では、ベクトルの方向から、初期位相補正部311により補正がなされた後の位相角θが得られる。
【0037】
このように、本実施形態においては、復調信号A、Bに対して、所定の角度θinit回転する補正を行うこととした。当該補正を行った後の復調信号A、Bを用いて、磁気ヘッド122のオフセット位置を示す位置信号を復調することで、位置の特定精度を向上させることができる。
【0038】
ところで、ポジションリサージュは、条件によっては円形とならず、コーナー部分にアールが付いた矩形形状に変形する可能性もあると説明した。この変形は、サーボ・トラック・ライタ(STW)のトラックピッチに対する、磁気ヘッド122のリードコア幅の比率により生じる。本実施形態ではSd=(リードコア幅)/(STWのトラックピッチ)とする。次に、Sdの違いに基づくポジションリサージュについて説明する。
【0039】
図6は、Sdの違いに基づくポジションリサージュの例を示した図である。図6の(A)は、Sd=0.14の場合のポジションリサージュを示し、図6(B)は、Sd=0.18の場合のポジションリサージュを示し、図6(C)は、Sd=0.22の場合のポジションリサージュを示している。図6の(A)〜(C)に示すように、Sdが大きくなるほど、ポジションリサージュが円に近づく。換言すると、磁気ヘッド122のリードコア幅が広くなる、又はSTWのトラックピッチが狭くなるほど、ポジションリサージュが円に近づくことになる。しかしながら、STWのトラックピッチが狭いほど、磁気ヘッド122の位置特定の精度の向上が必要となる。このため、磁気ヘッド122の位置特定の精度と、STWの性能と、のバランスに基づいてSTWのトラックピッチ等が決定されるものとする。
【0040】
また、本実施形態では、磁気ディスク111を、回転中心から半径方向(内外方向)に対して所定の間隔毎に、インナー、センター、及びアウターの3つのゾーンに分割する。なお、本実施形態では、所定の間隔毎としたが、実施の態様に応じて任意の間隔でよい。
【0041】
そして、アジマス補正部312は、復調信号A、Bのそれぞれを位相平面上で表したベクトルに対して、復調信号A、Bの元となる位置情報信号PosA、PosBの読み出し先のゾーン毎に、異なる角度で傾ける補正を行う。図7は、アジマス補正部312の補正の概念を示した図である。図7に示す例では、ポジションリサージュのコーナー部分にアールが付いた矩形形状の場合とする。なお、図7に示すポジションリサージュが矩形形状で、図5のポジションリサージュと形状が異なるが、これは説明を容易にするためとする。本実施形態では、初期位相補正部311により補正された後の復調信号A、Bに対して、アジマス補正部312が補正する。
【0042】
図7に示すように、アジマス補正部312による補正の前のポジションリサージュは、インナーのポジションリサージュ911、センターのポジションリサージュ912、アウターのポジションリサージュ913となる。
【0043】
図7に示すように、ゾーン毎に矩形形状のポジションリサージュの傾きが異なる。インナーでは、軸901に示すように角度θinでY軸から傾いており、アウターでは、軸903に示すように、インナーと逆方向に角度θoutでY軸から傾いている。
【0044】
そこで、アジマス補正部312は、インナーの復調信号A、Bに対して、矢印902が示す方向に角度θinのみ回転させる回転行列を掛ける。一方、アジマス補正部312は、アウターの復調信号A、Bに対して、矢印904が示す方向に角度θoutのみ回転させる回転行列を掛ける。これにより、ゾーン毎に異なっていた矩形形状のポジションリサージュの傾きが修正されることになる。これにより、磁気ヘッド122の位置の特定の際の精度を向上させることができる。なお、角度θin及び角度θoutは、ディスク記憶装置によって異なり、実測により定められる値となるため、具体的な値については説明を省略する。
【0045】
そして、アジマス補正部312が補正を行った後、速度補正部313が、補正した後の復調信号A、Bに対して補正を行う。
【0046】
次に、アクチュエータアーム115がシークしている場合におけるポジションリサージュの変化について説明する。なお、説明を容易にするために、アクチュエータアーム115を用いたシークが行われていない場合には、ポジションリサージュが円となる例について説明する。
【0047】
本実施形態にかかるディスク記憶装置100では、アクチュエータアーム115を用いてシークを行う場合、アクチュエータアーム115の移動速度に応じて、ポジションリサージュが楕円となる。この楕円の形状は、前方シークを行うのか、後方シークを行うのかにより変化する。ポジションリサージュが楕円となる場合、位相角θがリニアに変化しないため、位置の特定精度が低下する。そこで、本実施形態にかかるディスク記憶装置100の速度補正部313は、ポジションリサージュの楕円形状を、円にする補正を行う。
【0048】
図8は、速度補正部313の補正の概念を示した図である。図8のグラフ1001は、前方シークにより楕円形状となったポジションリサージュを示しており、グラフ1002は後方シークにより楕円形状となったポジションリサージュを示している。図8に示すように、前方シークの場合は、45度の方向で短径となる楕円形状であり、後方シークの場合は、−45度の方向で短径となる楕円形状とする。そこで、本実施形態にかかる速度補正部313は、前方シークの場合、復調信号A、Bを位相平面上で表したベクトルに対して、45度回転する回転行列を掛けた後、X軸方向に1.5倍する拡大行列を掛け、最後に−45度回転する回転行列を掛ける。これにより、楕円形状のポジションリサージュに対して、短径方向を長くする補正がなされたことになり、図8の1003に示すような円形状に補正されることになる。なお、後方シークの場合も同様の趣旨の処理を行うことで、円形状に補正できる。
【0049】
速度補正部313による補正により、アクチュエータアーム115の移動速度がある場合であっても、リードコアの位置特定の際のリニアリティを向上させることができる。
【0050】
ヘッド位置復調部314は、リニアリティ補正部321を備え、各種補正手法で補正された後の復調信号A、Bに基づいて、磁気ヘッド122のリードコアの位置信号を復調する。本実施形態にかかるヘッド位置復調部314は、補正された後の復調信号A、Bを入力し、復調信号A、Bにより位相平面に形成されるベクトルの方向を示す位相角θを磁気ヘッド122の位置信号として出力する。これにより、磁気ヘッド122の位置が特定できる。
【0051】
リニアリティ補正部321は、ヘッド位置復調部314が位置の復調を行う際、復調信号A、Bの変化に基づいて、リードコアとして特定される位置(位相角θ)の変化のリニアリティを向上させる補正を行う。つまり、ポジションリサージュが円の場合には、リードコアとして特定される位置(位相角θ)のリニアリティが高いために、リードコアのヘッドとして特定される位置の精度が高くなる。しかしながら、ポジションリサージュが矩形に近づくにつれてリードコアとして特定される位置(位相角θ)のリニアリティが低くなり、リードコアのヘッドの位置の特定精度が低くなる。そこで、本実施形態ではリニアリティを向上させる補正を行うこととした。
【0052】
ところで、従来、ポジションリサージュが円の場合、磁気ヘッド122のリードコアの位置(位相角θ)は、arctan(x)を用いて算出されていた。なお、この変数xは、|復調信号B成分|≦|復調信号A成分|の場合、変数x=|復調信号B成分|/|復調信号A成分|とし、|復調信号B成分|>|復調信号A成分|の場合、x=|復調信号A成分|/|復調信号B成分|とする。なお、復調信号A成分とは、復調信号Aのsin成分とし、復調信号B成分は、復調信号Bのsin成分とする。しかしながら、ポジションリサージュが円でなく、矩形の場合、arctan(x)で算出すると位置の検出精度が低くなる。
【0053】
そこで、本実施形態にかかるヘッド位置復調部314は、以下の2次多項式(1)を用いて算出された値に基づいて、リードコアを示す位相角θ、換言すればリードコアの位置として復調することとした。
(1−Gm)x+Gmx2……(1)
Gm:リニアリティを向上させる補正を行うために定められた係数
【0054】
図9は、係数Gmの違いによる2次多項式(1)の演算結果を示した図である。なお、ヘッド位置復調部314が、係数Gm=−0.35を用いて位置を復調した場合、arctan(x)を用いたのとほぼ同様の、リードコアの位置(位相角θ)が得られる。図9に示すように、係数Gm=−0.35から係数Gmの値を大きくさせるにつれて、arctan(x)を用いた場合と比べてより下向きに湾曲したカーブとなり、リニアリティの補正の度合いが大きくなることが確認できる。このように、本実施形態にかかるヘッド位置復調部314では、式(1)を用いて算出された値を位相角θとすることで、arctan(x)を用いた場合と比べて位置特定の際のリニアリティを向上させることができる。なお、係数Gmは、ポジションリサージュの形状、つまり、磁気ヘッド122のリードコア幅、及びSTWのトラックピッチに基づいて定められる。
【0055】
図10は、リニアリティの補正の対象として示したポジションリサージュの例を示した図である。図10に示すポジションリサージュにおいて、0度、90度、180度、270度の直交する位置でリサージュ波形がフラットとなり、45度方向のコーナー部で丸みをもつことになる。次に、図10に示すポジションリサージュ1201に対して、上記の2次多項式を用いた場合について説明する。
【0056】
ところで、2次多項式(1)を用いる際に、復調信号A成分、及び復調信号B成分は絶対値である必要がある。さらに、2次多項式(1)は、xが0〜1の場合に用いる場合には有用であるが、復調信号A、Bを位相平面上で示したベクトルが0〜2πで変化する場合については考慮されていない。そこで、本実施形態では、状況に応じて適切な値が求められるよう、上述した2次多項式(1)を拡張する必要がある。
【0057】
図11は、ポジションリサージュ上で、変数xとなる(|復調信号B成分|/|復調信号A成分|)またはその逆数(|復調信号A成分|/|復調信号B成分|)の違いに基づいて分割された領域を、位相平面の象限として示した説明図である。図11に示す位相平面では、45度間隔で左回りに第1象限、第2象限、第3象限、第4象限、第5象限、第6象限、第7象限及び第8象限の8象限に分割している。
【0058】
図12は、実施形態にかかる復調信号B成分及び復調信号A成分に基づいて定められる、図11に示すポジションリサージュの領域毎の位置算出手法を説明した図である。図12に示す、領域毎に異なる位置算出手法を用いて、磁気ヘッド122のリードコアの位置(位相角)を復号する。図12に示すように、復調信号A成分が0より大きいか否か、復調信号B成分が0より大きいか否か、及び|復調信号B成分|<|復調信号A成分|が成り立つか否かの組み合わせにより、領域1〜8が決定される。そして、領域に応じて変数xが、|復調信号B成分|/|復調信号A成分|または|復調信号A成分|/|復調信号B成分|に決定される。さらに、領域に応じて位置計算手法が特定される。なお、図12に示すfunc(x)は以下に示す2次多項式(2)とする。
func(x)=((1−Gm)x+Gmx2)×0.25……(2)
【0059】
このように本実施形態にかかるヘッド位置復調部314では、特定された領域に応じて、位置計算手法を異ならせることで、2次多項式を拡張した。
【0060】
次に、当該計算手法を用いた場合の位置を特定する際のリニアリティ(線形性)について説明する。図13は、図10に示すポジションリサージュを表す場合に、上述した位置計算手法を適用した場合のリニアリティを示した図である。図13に示す例では、線1601が、係数Gm=−0.35、換言すればarctan(x)を適用した場合のリニアリティを示しており、線1602が係数Gm=0.5を適用した場合のリニアリティを示している。図13に示すように、係数Gm=0.5は、係数Gm=−0.35と比べて、0〜2πの範囲で1に近似する値を保持している。このため、係数Gm=0.5は、係数Gm=−0.35と比べて、高いリニアリティを保持している。
【0061】
具体的には、図10に示すポジションリサージュにおいて、範囲1202では、直線を描くため位置の復調感度が低く、範囲1203では弧を描くため位置の復調感度が高くなる。また、図10の範囲1202が、図11に示す位相平面上の範囲1301に対応し、図10の範囲1203が、図11に示す位相平面上の範囲1302に対応する。従って、図13に示すグラフ上において、係数Gm=−0.35の場合、図10の範囲1202が範囲1603に対応し、図10の範囲1203が範囲1604に対応することになる。図13に示すように、ポジションリサージュの範囲1202のような復調感度が低い箇所では、係数Gm=−0.35のリニアリティは低くなるが、係数Gm=0.5であれば高いリニアリティを確保できる。また、ポジションリサージュの範囲1203のような復調感度が高い箇所であっても、係数Gm=−0.35と比べて、係数Gm=0.5の方が高いリニアリティを確保できる。
【0062】
このように図10に示すポジションリサージュを表す場合、ヘッド位置復調部314は、係数Gm=0.5を代入した図12に示す位置計算手法を用いて、磁気ヘッド122のリードコアの位置信号を復調することで高い精度で位置を特定することができる。
【0063】
このように、本実施形態にかかるヘッド位置復調部314は、上述した補正手法で補正された後の復調信号A成分の絶対値と復調信号B成分の絶対値との間の比率を示した変数xと、リニアリティを向上させる補正を行うために定められた係数Gmと、による2次多項式を用いて算出した位相角θを、磁気ヘッド122のリードコアの位置信号として出力する。具体的には図12に示す位置計算手法を用い、Sdに適した係数Gmを用いることで、位置の特定精度を向上できる。なお、係数Gmは、上述した条件によって異なり、実測により定められる値となるため、具体的な値については説明を省略する。
【0064】
次に、各ポジションリサージュから得られるリニアリティのばらつき度(確率密度)について説明する。図14は、Sd=0.14で図6(A)に示すようなポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。縦軸がリニアリティのばらつき具合を示し、横軸がGmを示している。図14に示すリニアリティのばらつき具合のうち最も小さい値が最適値となる。図14においては、ばらつき度が一番小さくなるGm(図14においては0.4)を用いることで、精度の良くリードコアの位置を得られる。
【0065】
次に、図15は、Sd=0.18で図6(B)に示すようなポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。図15においては、ばらつき度が一番小さいGm=0.2を用いることで、精度良くリードコアの位置を得られる。
【0066】
図16は、Sd=0.22で図6(C)に示すようなポジションリサージュを描く場合の、位相角θのリニアリティのばらつき具合を示した図である。図16においては、ばらつき度が一番小さいGm=−0.05を用いることで、精度良くリードコアの位置を得られる。
【0067】
図14〜図16に示すように、ポジションリサージュが円から矩形に近づくにつれて、リニアリティのばらつき具合が小さくなり、リードコアの位置の精度が向上することを把握できる。しかしながら、ポジションリサージュが矩形に近い場合でも、本実施形態にかかるリニアリティの補正を行うことで、リニアリティのばらつき具合を比較的小さくすることが可能であることが確認できる。このため、位置の精度と、STWのスペックと、を考慮した上で、STWのトラックピッチを決定すればよい。
【0068】
なお、リニアリティ補正部321で示したリニアリティを向上させる補正は、NULL復調を用いた場合に制限するものではなく、他の復調方式に対して適用可能である。例えば、面積復調を用いてヘッドの位置を特定するディスク記憶装置に対しても適用できる。
【0069】
本実施形態においては、ヘッド位置復調部314が磁気ヘッド122の位置を特定する際に、2次多項式(2)を用いたことで位置特定の精度を向上させる。また、2次多項式は、3次以上の多項式と比べて演算が容易にできるため、処理負担を軽減することができる。
【0070】
次に、本実施の形態にかかるディスク記憶装置100における、磁気ヘッド122の位置を特定するための処理について説明する。図17は、本実施の形態にかかるディスク記憶装置100における上述した処理の手順を示すフローチャートである。
【0071】
まず、磁気ヘッド122のリードコアが、NULLサーボパターンから位置情報信号PosA、及びPosBを読み出す(ステップS2001)。
【0072】
次に、NULL復調部331は、位置情報信号PosA、PosBに対してDFT(Discrete Fourier Transform)演算を行い、復調信号A、Bを復調する(ステップS2002)。
【0073】
その後、初期位相補正部311は、復調信号A、Bのそれぞれを位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う(ステップS2003)。
【0074】
次に、アジマス補正部312は、復調信号A、Bのそれぞれを位相平面上で表したベクトルに対して、復調信号A、Bの元となる位置情報信号PosA、PosBが含まれていたゾーン毎に異なる角度で傾ける補正を行う(ステップS2004)。
【0075】
そして、速度補正部313が、復調信号A、Bで表されるポジションリサージュの楕円形状が、円になるよう補正を行う(ステップS2005)。
【0076】
その後、ヘッド位置復調部314が、リニアリティ補正部321を用いて復調信号A、Bに基づいて特定されるリードコアの位相角のリニアリティを向上させつつ、位置信号を復調する(ステップS2006)。
【0077】
上述した処理手順により、本実施形態にかかるディスク記憶装置100では、HDC131内で各種補正を行った後に、位置信号が復調される。
【0078】
なお、本実施形態では、初期位相補正、アジマス補正、速度補正、及びリニアリティ補正の順で補正を行ったが、補正の順序を制限するものではなく任意の順序で行っても良い。また、初期位相補正、アジマス補正、速度補正、及びリニアリティ補正を全て行う必要もなく、1つ以上の補正が行われていれば、磁気ヘッド122のオフセット位置の特定精度を向上させることができる。さらに、ほかの補正と組み合わせても良い。
【0079】
本実施形態にかかるディスク記憶装置100によれば、上述した補正手法のいずれか1つ以上を用いて復調信号A、Bの補正を行うことで、磁気ヘッド122の位置の特定精度を向上させることができる。
【0080】
本発明の実施形態を説明したが、この実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0081】
100…ディスク記憶装置、122…磁気ヘッド、311…初期位相補正部、312…アジマス補正部、313…速度補正部、314…ヘッド位置復調部、321…リニアリティ補正部、331…NULL復調部
【特許請求の範囲】
【請求項1】
媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調手段と、
前記第1の復調信号及び前記第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う位相補正手段と、
前記位相補正手段で補正された後の前記第1の復調信号、及び前記第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する位置復調手段と、
を備える位置復調装置。
【請求項2】
前記位相補正手段が補正を行う前記所定の角度は、前記第1の復調信号及び前記第2の復調信号のそれぞれを用いて前記位相平面上に生成されるリサージュ図形と、当該位相平面の座標軸と、の間で生じている傾きを修正する角度である、
請求項1に記載の位置復調装置。
【請求項3】
前記位置復調手段は、前記第1の復調信号及び前記第2の復調信号の線形性を向上させる補正を行うために予め定められた係数と、前記位相補正手段で補正された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記位置信号として出力する、
請求項1又は2に記載の位置復調装置。
【請求項4】
前記位置復調手段は、前記位置信号を出力する前記2次多項式として、
(1−Gm)x+Gmx2
x:|前記第1の復調信号|/|前記第2の復調信号|、又は|前記第2の復調信号|/|前記第1の復調信号|
Gm:線形性を向上させる補正を行うために定められた係数
を用いる、
請求項3に記載の位置復調装置。
【請求項5】
媒体のサーボ領域に対するヘッドの位置決めを行うために記録されたサーボパターンを前記ヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調手段と、
前記第1の復調信号及び前記第2の復調信号の線形性を向上させる補正を行うために定められた係数と、前記復調手段で復調された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記ヘッドの位置を特定するための位置信号として出力する位置復調手段と、
を備える位置復調装置。
【請求項6】
前記位置復調手段は、前記位置信号を出力する前記2次多項式として、
(1−Gm)x+Gmx2
x:|前記第1の復調信号|/|前記第2の復調信号|、又は|前記第2の復調信号|/|前記第1の復調信号|
Gm:線形性を向上させる補正を行うために定められた係数
を用いる、
請求項5に記載の位置復調装置。
【請求項7】
前記媒体が円盤状の媒体であって、当該媒体を回転中心から半径方向に任意の間隔で分割した各領域をゾーンと定義し、
前記第1の復調信号、及び前記第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、前記読出信号の読み出し先のゾーン毎に異なる角度を傾ける補正を行うアジマス補正手段を、さらに備え、
前記位置復調手段が、前記アジマス補正手段により補正がなされた後の前記第1の復調信号及び前記第2の復調信号を用いる、
請求項1乃至6のいずれか1つに記載の位置復調装置。
【請求項8】
位置復調装置で実行される位置復調方法であって、
媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調ステップと、
前記第1の復調信号及び前記第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う位相補正ステップと、
前記位相補正ステップで補正された後の前記第1の復調信号、及び前記第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する位置復調ステップと、
を有する位置復調方法。
【請求項9】
前記位置復調ステップは、線形性を向上させる補正を行うために予め定められた係数と、前記位相補正ステップで補正された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記位置信号として出力する、
請求項8に記載の位置復調方法。
【請求項10】
媒体のサーボ領域に位置決めを行うために記録されたサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調ステップと、
線形性を向上させる補正を行うために定められた係数と、前記復調ステップで復調された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記ヘッドの位置を特定するための位置信号として出力する位置復調ステップと、
を有する位置復調方法。
【請求項1】
媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調手段と、
前記第1の復調信号及び前記第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う位相補正手段と、
前記位相補正手段で補正された後の前記第1の復調信号、及び前記第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する位置復調手段と、
を備える位置復調装置。
【請求項2】
前記位相補正手段が補正を行う前記所定の角度は、前記第1の復調信号及び前記第2の復調信号のそれぞれを用いて前記位相平面上に生成されるリサージュ図形と、当該位相平面の座標軸と、の間で生じている傾きを修正する角度である、
請求項1に記載の位置復調装置。
【請求項3】
前記位置復調手段は、前記第1の復調信号及び前記第2の復調信号の線形性を向上させる補正を行うために予め定められた係数と、前記位相補正手段で補正された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記位置信号として出力する、
請求項1又は2に記載の位置復調装置。
【請求項4】
前記位置復調手段は、前記位置信号を出力する前記2次多項式として、
(1−Gm)x+Gmx2
x:|前記第1の復調信号|/|前記第2の復調信号|、又は|前記第2の復調信号|/|前記第1の復調信号|
Gm:線形性を向上させる補正を行うために定められた係数
を用いる、
請求項3に記載の位置復調装置。
【請求項5】
媒体のサーボ領域に対するヘッドの位置決めを行うために記録されたサーボパターンを前記ヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調手段と、
前記第1の復調信号及び前記第2の復調信号の線形性を向上させる補正を行うために定められた係数と、前記復調手段で復調された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記ヘッドの位置を特定するための位置信号として出力する位置復調手段と、
を備える位置復調装置。
【請求項6】
前記位置復調手段は、前記位置信号を出力する前記2次多項式として、
(1−Gm)x+Gmx2
x:|前記第1の復調信号|/|前記第2の復調信号|、又は|前記第2の復調信号|/|前記第1の復調信号|
Gm:線形性を向上させる補正を行うために定められた係数
を用いる、
請求項5に記載の位置復調装置。
【請求項7】
前記媒体が円盤状の媒体であって、当該媒体を回転中心から半径方向に任意の間隔で分割した各領域をゾーンと定義し、
前記第1の復調信号、及び前記第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、前記読出信号の読み出し先のゾーン毎に異なる角度を傾ける補正を行うアジマス補正手段を、さらに備え、
前記位置復調手段が、前記アジマス補正手段により補正がなされた後の前記第1の復調信号及び前記第2の復調信号を用いる、
請求項1乃至6のいずれか1つに記載の位置復調装置。
【請求項8】
位置復調装置で実行される位置復調方法であって、
媒体のサーボ領域に記録されたNULLサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調ステップと、
前記第1の復調信号及び前記第2の復調信号のそれぞれを、位相平面上で表したベクトルに対して、所定の角度を傾ける補正を行う位相補正ステップと、
前記位相補正ステップで補正された後の前記第1の復調信号、及び前記第2の復調信号に基づいて、ヘッドのコアの位置を特定するための位置信号を復調する位置復調ステップと、
を有する位置復調方法。
【請求項9】
前記位置復調ステップは、線形性を向上させる補正を行うために予め定められた係数と、前記位相補正ステップで補正された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記位置信号として出力する、
請求項8に記載の位置復調方法。
【請求項10】
媒体のサーボ領域に位置決めを行うために記録されたサーボパターンをヘッドが読み出した読出信号に対するDFT(Discrete Fourier Transform)演算の結果として、第1の復調信号、及び第1の復調信号と90度の位相差を有する第2の復調信号を復調する復調ステップと、
線形性を向上させる補正を行うために定められた係数と、前記復調ステップで復調された後の前記第1の復調信号の絶対値と前記第2の復調信号の絶対値との間の比率による変数と、による2次多項式を用いた算出結果を、前記ヘッドの位置を特定するための位置信号として出力する位置復調ステップと、
を有する位置復調方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−243367(P2012−243367A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−114160(P2011−114160)
【出願日】平成23年5月20日(2011.5.20)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月20日(2011.5.20)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]