
位置情報取得システム及びプログラム
【課題】車両の正確な位置情報を提供することが可能な位置情報取得システム及びプログラムを提供する。
【解決手段】車両用警報装置10には、車両のシガーソケットに接続されたシガープラグコードを接続するためのDCジャック21が設けられている。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。車両には、直流の電源とこれを充電するオルタネータが設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、オルタネータノイズから車両のエンジン回転数を導出する。そして、GPS測位不可能となった場合には、エンジン回転数に基づいて車両の速度を導出し、車両の位置情報を表示する。
【解決手段】車両用警報装置10には、車両のシガーソケットに接続されたシガープラグコードを接続するためのDCジャック21が設けられている。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。車両には、直流の電源とこれを充電するオルタネータが設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、オルタネータノイズから車両のエンジン回転数を導出する。そして、GPS測位不可能となった場合には、エンジン回転数に基づいて車両の速度を導出し、車両の位置情報を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報取得システム及びプログラムに関するものである。
【背景技術】
【0002】
車両に搭載される車載用電子機器としては、例えば車両用警報装置がある。車両用警報装置には、GPS衛星データに基づいて導出した自車の位置情報が予め記憶された車両速度測定装置の位置情報と接近した場合、所定の報知を行うものがある(例えば特許文献1参照)。このような車両用警報装置は、報知が行われた場合に自車が車両速度測定装置に接近していることを意味するため、速度超過に対する注意を喚起することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−41281号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS衛星データに基づいて自車の位置情報を導出する車両用警報装置では、トンネル内やビル街等でGPS衛星データを受信できなくなった場合、GPS衛星データに基づいて自車の位置情報を導出できなくなってしまう。このことは、例えばトンネルの出口付近に車両速度測定装置が設置されている状況等において、自車が車両速度測定装置に接近しているにも関わらず報知を行わない事象が発生することに繋がり得る。
【0005】
なお以上の問題は、車両用警報装置に限らず、車両に搭載される他の車載用電子機器にも該当する問題である。また、車載用電子機器に限らず、GPS衛星データ等の飛来する電波信号に基づいて位置情報を取得する位置情報取得システムにも該当する問題である。
【0006】
本発明は上記例示した事情等に鑑みてなされたものであり、車両の正確な位置情報を提供することが可能な位置情報取得システムを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
請求項1に記載の発明では、飛来する所定の電波信号を受信する電波信号受信部と、前記所定の電波信号に基づいて車両の位置情報を取得する位置情報第1取得手段と、前記車両のエンジンの回転数を取得する回転数取得手段と、加速度を取得する加速度取得手段と、前記回転数取得手段及び前記加速度取得手段の取得結果に基づいて、前記車両の変速装置のギア状態を識別するギア状態識別手段と、前記回転数取得手段の取得結果及び前記ギア状態識別手段の識別結果に基づいて、前記車両の走行速度を取得する走行速度取得手段と、前記所定の電波信号が受信不可能となった場合、前記車両の走行速度に基づいて前記車両の位置情報を取得する位置情報第2取得手段とを備えたことを特徴とする。
【0008】
本位置情報取得システムによれば、車両のエンジンの回転数を取得し、加速度の取得結果に基づいて車両の変速装置のギア状態を識別する。そして、取得したエンジンの回転数及び識別した変速装置のギア状態に基づいて、車両の走行速度を取得する。かかる構成とすることにより、所定の電波信号に基づいて車両の位置情報を取得できなくなった場合であっても、取得した車両の走行速度から車両の正確な位置情報を取得して提供することが可能となる。
【0009】
なお、ここにいう「取得」とは、「検出」,「導出」及び「算出」の意味も含むものである。すなわち、自らセンサ等によって検出して取得するものや、車両等の外部のセンサによって検出されたものを通信等によって取得するもの、検出して得られたものに所定の演算処理を行うことで取得するもの等を含む。以下も同じである。
【0010】
請求項2に記載の発明では、請求項1に記載の構成に加えて、車両電源に重畳されるオルタネータノイズを取得するノイズ取得手段を備え、前記回転数取得手段は、前記ノイズ取得手段の取得結果に基づいて前記エンジンの回転数を取得することを特徴とする。
【0011】
本位置情報取得システムによれば、車両電源に重畳されるオルタネータノイズに基づいてエンジンの回転数を取得するため、例えば、当該位置情報取得システムの電源を車両電源から取得する構成とすれば、取得する車両電源からエンジンの回転数も取得できる。したがって、電源の配線とは別にエンジンの回転数を取得するための配線等をしなくてもよく、位置情報取得システムのコストアップを抑制できるとともに、位置情報取得システムの車両への搭載作業を容易なものとすることが可能となる。
【0012】
請求項3に記載の発明では、請求項1又は請求項2に記載の構成に加えて、前記加速度取得手段の取得結果を積分して前記車両の走行速度を取得する走行速度第2取得手段と、前記車両の車両状態を判定する車両状態判定手段とを備え、前記位置情報第2取得手段は、前記車両状態判定手段の判定結果に基づいて、前記走行速度取得手段の取得した走行速度と、前記走行速度第2取得手段の取得した走行速度と、のいずれかに基づいて前記車両の位置情報を取得することを特徴とする。
【0013】
本位置情報取得システムによれば、所定の電波信号が受信不可能となった場合、取得したエンジンの回転数及びギア状態識別手段の識別結果に基づいて取得した走行速度と、加速度取得手段の取得結果を積分して取得した走行速度と、のいずれかに基づいて車両の位置情報を取得する。かかる構成とすることにより、所定の電波信号が受信不可能となった場合であっても車両の位置情報を正確に取得することが可能となる。
【0014】
車両状態の判定として具体的には、ギア状態が変化したか否か、ギア状態が変化してから所定時間を経過したか否か等を判定する構成が代表例として考えられる。
【0015】
請求項4に記載の発明では、請求項3に記載の構成に加えて、前記位置情報第2取得手段は、前記変速装置のギア状態が変化した場合、前記走行速度第2取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする。
【0016】
本位置情報取得システムによれば、変速装置のギア状態が変化した場合、加速度取得手段の取得結果を積分して取得した走行速度に基づいて車両の位置情報を取得する。変速装置のギア状態が変化する際にはエンジンの回転数が短時間に大きく変化し得るため、加速度取得手段の取得結果を積分して取得した走行速度に基づいて車両の位置情報を取得することにより、車両の位置情報を正確に取得することが可能となる。
【0017】
請求項5に記載の発明では、請求項3又は請求項4に記載の構成に加えて、前記位置情報第2取得手段は、前記変速装置のギア状態が変化してから所定期間を経過した場合、前記走行速度取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする。
【0018】
本位置情報取得システムによれば、変速装置のギア状態が変化してから所定期間を経過した場合、エンジンの回転数及び変速装置のギア状態から取得した走行速度を用いて車両の位置情報を取得する。変速装置のギア状態が変化してから所定期間を経過した場合には、エンジンの回転数変化が小さくなる一方、加速度取得手段の取得結果を積分して取得した走行速度と、車両の実際の走行速度と、の誤差が大きくなる。そこで、変速装置のギア状態が変化してから所定期間を経過した場合に走行速度取得手段の取得した走行速度に基づいて車両の位置情報を取得することにより、車両の位置情報を正確に取得することが可能となる。
【0019】
請求項6に記載の発明では、請求項1乃至請求項5のいずれかに記載の構成に加えて、前記車両の移動方向を取得する移動方向取得手段を備え、前記位置情報第2取得手段は、前記車両の走行速度と、前記移動方向取得手段の取得結果と、に基づいて前記車両の位置情報を取得することを特徴とする。
【0020】
本位置情報取得システムによれば、車両の走行速度と移動方向に基づいて車両の位置情報を取得するため、車両の位置情報を正確に取得することが可能となる。
【0021】
請求項7に記載の発明では、請求項1乃至請求項6のいずれかに記載の構成に加えて、大気圧を取得する大気圧取得手段を備え、前記位置情報第2取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする。
【0022】
本位置情報取得システムによれば、所定の電波信号が受信不可能となった場合、大気圧取得手段の取得結果に基づいて車両の位置情報を取得する。かかる構成とすることにより、例えば、トンネルへの進入に伴って所定の電波信号が受信不可能となり、その後に車両がトンネル外に移動した場合において、大気圧の変化からトンネル外に移動したことを速やかに取得することが可能となり、車両の位置情報を正確に取得することが可能となる。
【0023】
請求項8に記載の発明では、請求項7に記載の構成に加えて、前記位置情報第1取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする。
【0024】
本位置情報取得システムによれば、所定の電波信号が受信可能な状況においても大気圧取得手段の取得結果に基づいて車両の位置情報を取得する。かかる構成とすることにより、山間部を車両が走行している場合や、高速道路と一般道路が上下に並行して設けられた箇所を車両が走行している場合等において、車両の位置情報を正確に取得することが可能となる。
【0025】
請求項9に記載の発明では、飛来する所定の電波信号を受信する電波信号受信部と、大気圧を取得する大気圧取得手段と、前記所定の電波信号及び前記大気圧取得手段の取得結果に基づいて車両の位置情報を取得する位置情報取得手段とを備えたことを特徴とする。
【0026】
本位置情報取得システムによれば、所定の電波信号及び大気圧取得手段の取得結果に基づいて車両の位置情報を取得する。かかる構成とすることにより、山間部を車両が走行している場合や、高速道路と一般道路が上下に並行して設けられた箇所を車両が走行している場合等において、車両の位置情報を正確に取得することが可能となる。
【0027】
請求項10に記載の発明は、請求項1乃至請求項9のいずれかに記載の位置情報取得システムにおける機能をコンピュータに実現させるためのプログラムである。
【0028】
本位置情報取得システムの各手段は、その全てを車両内に備える構成が望ましいが、手段内の一部の機能を通信によってアクセス可能な車両外の機器で実施するようにしてもよい。また、本位置情報取得システムは、単一の筐体に格納した機器として構成してもよいし、複数の筐体に格納した機器として構成してもよい。
【発明の効果】
【0029】
所定の電波信号に基づいて車両の位置情報を取得できなくなった場合であっても、取得した車両の走行速度から車両の正確な位置情報を取得して提供することが可能となる。
【図面の簡単な説明】
【0030】
【図1】一実施の形態における車両用警報装置を示す図である。
【図2】車両用警報装置のブロック図である。
【図3】自車位置表示処理を示すフローチャートである。
【図4】速度導出処理を示すフローチャートである。
【図5】位置導出処理を示すフローチャートである。
【発明を実施するための形態】
【0031】
以下、位置情報取得システムを備えた車載用電子機器の一種である車両用警報装置に適用した場合の実施形態を説明する。
【0032】
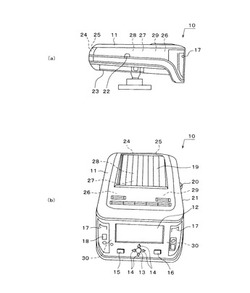
図1は車両用警報装置10の構成を示す図である。車両用警報装置10は、本体部11を有している。本体部11の前面には、自車の位置情報等の各種情報を提供する表示装置12が設けられている。表示装置12は、小型液晶ディスプレイによって形成されている。表示装置12の下方には、中央部に設定ボタン13が配置されるとともに、当該設定ボタン13の四方を囲むようにして選択ボタン14が配置されている。設定ボタン13及び選択ボタン14は、例えば車両用警報装置10を車両(自車)に搭載した際に、その車種やタイヤ径等を登録すべく操作されるボタンである。選択ボタン14の左方には、表示装置12に表示される情報を切り替える際に操作される切替ボタン15が配置されており、選択ボタン14の右方には、リセットボタン16が配置されている。表示装置12の左右両側方には、車両速度測定装置の接近等を報知する警報ランプ17が配置されている。また、表示装置12の左方には、携帯電話機等の赤外線通信機を内蔵した外部装置とデータの送受信を行うための赤外線通信機18が配置されている。
【0033】
本体部10の上面には、中央から後部にかけてソーラーパネル19が配置されている。本体部11の右面には、電源スイッチ20とDCジャック21が配置されている。DCジャック21は、車両のシガーソケットに接続されたシガープラグコードを接続するためのものである。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。なお、本車両用警報装置10は、ソーラーパネル19を搭載しているため、前記シガープラグコードがDCジャック21に接続されなかった場合であってもソーラーパネル19に蓄えられた電力によって動作を行うことができる。本体部10の左面には、メモリーカードリーダ等の外部装置を接続するためのアダプタージャック22が配置されている。本体部11の下面には、例えば車両に備えられた車内LAN等に接続されたケーブルを接続可能なコネクタ部23が配置されている。
【0034】
本体部11の内部には、無線受信機24とマイクロ波受信機25が後部寄りに配置されており、GPS受信機26と加速度センサ27とジャイロセンサ28と気圧センサ29とが上部に配置されており、スピーカ30が前部に配置されている。無線受信機24は、緊急車両等の発する無線電波を受信するためのものであり、マイクロ波受信機25は、速度測定装置から出力される周波数帯のマイクロ波を受信するためのものである。
【0035】
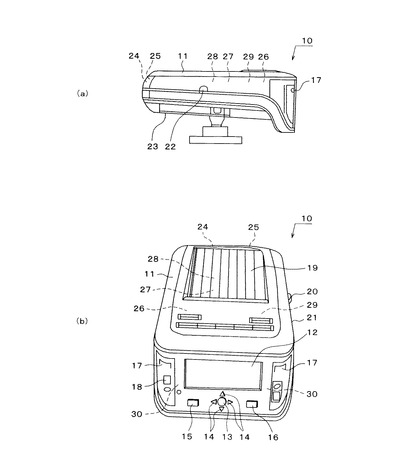
次に、本車両用警報装置10の電気的構成について、図2のブロック図に基づいて説明する。
【0036】
制御部31は、車両用警報装置10の動作全般を制御する機能を有しており、CPU,ROM,RAM,I/O及びこれらを接続するバス等により構成されている。
【0037】
データベース32は、制御部31に内蔵された又は当該制御部31に外付けされた不揮発性メモリである。データベース32には、車両速度測定装置の位置に関わる情報の他に、地図情報や車種と対応した各ギア位置の係数等の各種情報が出荷時に記憶されている。
【0038】
制御部31の入力側には、設定ボタン13,選択ボタン14,切替ボタン15,リセットボタン16,電源スイッチ20,DCジャック21,コネクタ部23,無線受信機24,マイクロ波受信機25,GPS受信機26,加速度センサ27,ジャイロセンサ28,気圧センサ29が接続されている。なお、リモコン受信器を制御部31の入力側に接続し、リモコン(子機)を操作することで設定ボタン13等と同様の設定を行うことができる構成としても良い。制御部31の出力側には、表示装置12,警報ランプ17,スピーカ30が接続されている。また、赤外線通信機18及びアダプタージャック22は、制御部31と入出力可能に接続されている。
【0039】
DCジャック21は、車両から電源供給を受けて動作を行う場合に車両のシガーソケットに接続されたシガープラグコードと接続するためのものである。車両には、直流の電源とこれを充電するオルタネータ(交流発電機)が設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部31は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、公知の方法によってオルタネータノイズから車両のエンジン回転数を導出することができる。
【0040】
アダプタージャック22は、データベース32に記憶された地図情報等の各種情報を更新したり、制御部31やデータベース32のメモリに記憶された情報を外部に取り出したりする場合に用いられる接続部である。すなわち、アダプタージャック22にメモリーカードリーダ等の読み書き可能な外部装置を接続することにより、制御部31が、メモリーカードリーダに装着されたメモリーカード内のデータをデータベース32に取り込んだり、データベース32や制御部31のメモリに記憶されたデータをメモリーカードに書き込んだりする。なお、メモリーカードリーダを車両用警報装置10が備える構成としても良い。また、本車両用警報装置10は、赤外線通信機18によって上記データの送受信を行うことも可能である。
【0041】
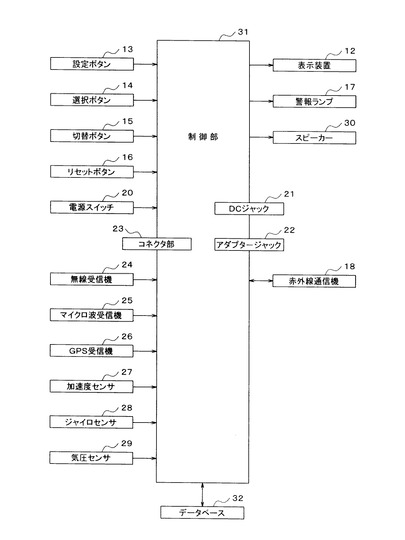
制御部31は、周知のGPS警報機能,マイクロ波警報機能,無線警報機能の他に、自車の位置情報を表示する自車位置表示機能を備えている。そこで以下では、自車の位置情報を表示するにあたって制御部31が行う自車位置表示処理を、図3のフローチャートに基づいて説明する。
【0042】
ステップS101では、自車の速度を導出する速度導出処理を行う。
【0043】
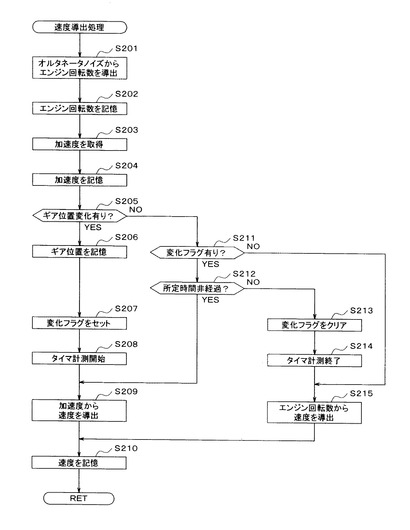
速度導出処理では、図4のフローチャートに示すように、ステップS201にてオルタネータノイズからエンジン回転数を導出し、ステップS202にて導出したエンジン回転数を制御部31に設けられたエンジン回転数記憶エリア(図示略)に記憶する。制御部31のノイズ検出部は、エンジンに直結したオルタネータの出力を整流する整流部と、整流した後に残っている交流分を取り出すフィルタ部と、取り出した交流分を2値化してパルスを作る2値化回路部と、作成されたパルスをカウントするカウンタ部と、により構成されている。ステップS201では、ノイズ検出部のカウンタ部の出力をカウントし、ステップS202では、当該カウント結果をエンジン回転数記憶エリアに記憶する。エンジン回転数記憶エリアは所定期間のカウント結果を順次記憶できるようになっているため、制御部31は、エンジン回転数記憶エリアを参照することにより、エンジン回転数の時間的変化を把握することができる。ステップS203では、加速度センサ27の検出結果から自車の加速度を取得し、ステップS204では、取得した加速度を制御部31に設けられた加速度記憶エリア(図示略)に記憶する。
【0044】
ステップS205では、エンジン回転数及び加速度に基づいて、自車の変速装置のギア位置が変化したか否かを判定する。例えば、エンジン回転数が低下する一方で加速度が減速を示さなかった場合には、ギア位置が変化した(より詳しくはシフトアップした)と判定することができ、エンジン回転数が低下するとともに加速度が減速を示した場合には、自車が減速しているのであってギア位置は変化していないと判定することができる。ギア位置が変化したと判定した場合には、ステップS206に進み、制御部31に設けられたギア位置記憶エリア(図示略)にそのときのギア位置を記憶する。具体的には、ステップS205にてシフトアップしたと判定した場合には、ギア位置記憶エリアに記憶されているギア位置を1段上のギア位置に変更し、ステップS205にてシフトダウンしたと判定した場合には、ギア位置記憶エリアに記憶されているギア位置を1段下のギア位置に変更する。ステップS207では、ギア位置が変化したことを示す変化フラグをセットし、ステップS208では、ギア位置が変化してからの経過時間を把握すべくタイマ計測を開始する。ステップS209では、加速度を積分することによって自車の速度を導出する。その後、ステップS210にて制御部31に設けられた速度記憶エリア(図示略)にステップS209にて導出した速度を記憶し、本処理を終了する。
【0045】
ステップS205にてギア位置が変化していないと判定した場合には、ステップS211に進み、変化フラグがセットされているか否かを判定する。変化フラグがセットされている場合には、ステップS212に進み、タイマの値が予め定めた所定値に非到達であるか否か、すなわちギア位置が変化してから所定時間を経過していないか否かを判定する。所定時間を経過していない場合には、ステップS209に進み、加速度を積分することによって自車の速度を導出する。その後、ステップS210にて制御部31の速度記憶エリアにステップS209にて導出した速度を記憶し、本処理を終了する。なお、上記所定時間は、ギア位置が変化してからエンジン回転数が安定するまでに要する時間をデータベース32に車種毎に予め記憶させておいてもよいし、自車のエンジン回転数データから制御部31が学習して設定する構成としてもよい。
【0046】
ギア位置が変化してから所定時間を経過した場合には、ステップS213にて変化フラグをクリアするとともにステップS214にてタイマ計測を終了する。その後、ステップS215にてエンジン回転数から自車の速度を導出する。具体的には、エンジン回転数にギア位置の係数を乗算することで速度を導出する。ギア位置の係数は車両のギア比、タイヤ径によって求めることができるものであるため、本車両用警報装置10では、車両への新規取付時に車種及びタイヤ径の登録を要求するようになっている。エンジン回転数から自車の速度を導出した場合には、ステップS210にて制御部31の速度記憶エリアに導出した速度を記憶し、本処理を終了する。また、ステップS211にて変化フラグがセットされていないと判定した場合についても、ギア位置が変化してから所定時間を経過したことを意味するため、ステップS215にてエンジン回転数から自車の速度を導出するとともに、ステップS210にて制御部31の速度記憶エリアに導出した速度を記憶し、本処理を終了する。
【0047】
以上のように、速度導出処理では、ギア位置が変化してから所定時間を経過するまでの期間において、加速度から自車の速度を導出し、他の期間において、エンジン回転数から自車の速度を導出するようになっている。
【0048】
自車位置表示処理の説明に戻り、速度導出処理が終了した場合には、ステップS102に進み、自車の位置を導出する位置導出処理を行う。
【0049】
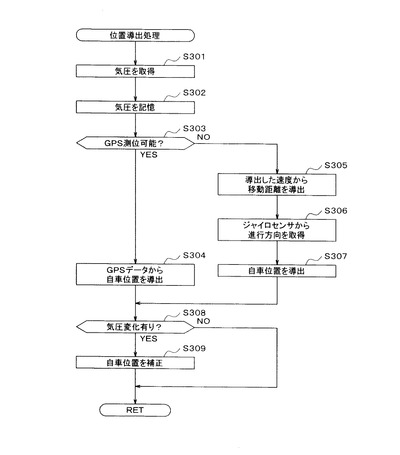
位置導出処理では、図5のフローチャートに示すように、ステップS301にて気圧センサ29の検出結果から気圧を取得し、ステップS302にて取得した気圧を制御部31に設けられた気圧記憶エリア(図示略)に記憶する。気圧記憶エリアは所定期間の取得結果を順次記憶できるようになっているため、制御部31は、気圧記憶エリアを参照することにより、気圧の時間的変化を把握することができる。ステップS303では、GPS測位可能であるか否か、すなわちGPSデータを受信できているか否かを判定する。GPS測位可能である場合には、ステップS304に進み、GPSデータから自車位置を導出する。一方、GPS測位不可能である場合には、ステップS305に進み、制御部32の速度記憶エリアに記憶されている速度から自車の移動距離を導出する。ステップS306では、ジャイロセンサ28の検出結果から自車の進行方向を取得する。ステップS307では、導出した移動距離及び進行方向から自車位置を導出する。
【0050】
自車位置を導出した後、ステップS308では、気圧が変化したか否かを判定する。気圧が変化していない場合には、そのまま本処理を終了し、気圧が変化した場合には、ステップS309にて自車位置を補正し、本処理を終了する。ステップS309の処理を行う効果について具体的に説明すると、GPS測位可能な状況で気圧が変化する場合としては、例えば山間部を車両が走行している場合や、一般動路から高速道路に移動すべく勾配のついた道路を車両が走行している場合が代表例として挙げられる。都市部等においては高速道路と一般道路が上下に並行して設けられた区間があり、当該区間を車両が走行している場合には、正確な情報を提供できなくなる可能性が生じ得る。具体的には、車両が一般道路を走行しているにも関わらずGPSデータに基づいて高速道路に設置された車両速度測定装置の接近を報知してしまったり、車両が高速道路を走行しているにも関わらず一般道路の走行を前提としたナビゲーションをしてしまったりする事象が発生し得る。そこで、本車両用警報装置10では、気圧が変化したことに基づいて高速道路に向かっていると認識して自車位置を補正する。当該補正を行うことにより、上記懸念を好適に解消しつつ正確な情報を提供することができる。また、GPS測位不可能な状況で気圧が変化する場合としては、車両がトンネルに進入した場合や、車両がトンネル外に移動した場合が代表例として挙げられる。高速道路等においては、トンネル出口の近傍に車両速度測定装置の設置されている区間がある。車両のトンネル進入時及びトンネル脱出時には気圧が急激に変化するため、気圧が変化したことに基づいて自車位置を補正することにより、前記区間を車両が走行する場合においても正確に車両速度測定装置の接近を報知することができる。
【0051】
自車位置表示処理の説明に戻り、位置導出処理が終了した場合には、ステップS103にて自車位置を表示装置12に表示し、本処理を終了する。
【0052】
以上詳述した本実施の形態によれば、以下の優れた効果を奏する。
【0053】
GPS測位不可能な場合には、ジャイロセンサから取得した進行方向と、導出した車両の速度と、によって自車位置を導出する構成とした。かかる構成とすることにより、GPS測位不可能となった場合であっても、正確な自車位置を表示したり、当該自車位置に基づいて車両速度測定装置の接近を報知したりすることができる。
【0054】
オルタネータノイズからエンジン回転数を導出するとともに、導出したエンジン回転数及び加速度からギア位置を把握し、これらに基づいて車両の速度を導出する構成とした。確かに、車両の車軸に車速センサを設ける構成とすれば、正確な車両の速度や移動距離を得ることが可能である。しかしながら、かかる構成とした場合には、車両用警報装置のコストアップに繋がるのみならず、車両用警報装置の車両への搭載が煩雑なものとなってしまう。一方、オルタネータノイズからエンジン回転数を導出するとともに、導出したエンジン回転数及び加速度からギア位置を把握し、これらに基づいて車両の速度を導出する構成とした場合には、DCジャック21に車両のシガーソケットに接続されたシガープラグコードを接続すれば良いため、車両用警報装置10のコストアップを抑制するとともに車両への搭載を容易なものとすることが可能となる。
【0055】
また、エンジン回転数に基づいて速度を導出する構成とすることにより、GPS衛星データが受信不可能となった場合であっても車両の位置情報を正確に導出することが可能となる。確かに、オルタネータノイズからエンジン回転数を導出しない構成とするとともに、加速度センサの検出結果から自車の加速度を取得して速度を常時導出する構成とすることも可能である。しかしながら、かかる構成とした場合には、車両が上り坂等の勾配のついた道路を走行している状況において速度を導出するための演算が複雑なものとなり、車両の実速度との誤差が大きくなる可能性がある。また、車両の移動距離を導出するためには加速度を2回積分しなければならないため、加速度に基づく移動距離の導出を長時間行った場合には、車両の実移動距離との誤差が大きくなる可能性がある。一方、エンジン回転数に基づいて速度を導出する構成とした場合には、上記各懸念を好適に解消することが可能となる。
【0056】
ギア位置が変化してから所定時間を経過するまでの期間では、加速度から自車の速度を導出し、他の期間では、エンジン回転数から自車の速度を導出する構成とした。加速度から自車の速度を導出する構成においては上述した懸念が生じる一方、エンジン回転数に基づいて速度を導出する構成においては、時間あたりのエンジン回転数の変化が大きい状況において車両の実速度との誤差が大きくなる可能性がある。時間あたりのエンジン回転数の変化が大きい状況としては、ギア位置が変化する状況が代表例として挙げられる。そこで、ギア位置が変化してから所定時間を経過するまでの期間において加速度から自車の速度を導出し、他の期間においてエンジン回転数から自車の速度を導出する構成とすることにより、各期間における車両の実速度との誤差を小さくすることが可能となり、GPS衛星データが受信不可能となった場合であっても車両の位置情報を正確に導出することが可能となる。
【0057】
メモリーカードリーダ等の外部装置を接続するためのアダプタージャック22を設けたため、データベース32に記憶された各種情報を新たな情報に更新することができる。この結果、例えばデータベース32に記憶されていない最新型の車両に車両用警報装置10を搭載する場合であっても、前記最新型の車両のギア比の係数等をデータベース32に新たに記憶させることで車両の位置情報を正確に導出することが可能となる。
【0058】
なお、上述した各実施の形態の記載内容に限定されず、例えば次のように実施してもよい。
【0059】
(1)上記実施の形態では、GPSデータに基づいて自車位置を導出する機能と、速度に基づいて自車位置を導出する機能と、を備えた構成について説明したが、飛来する電波信号に基づいて自車位置を導出する機能と、速度に基づいて自車位置を導出する機能と、を備えた構成であっても、上記実施の形態と同様の作用効果を奏することが期待できる。
【0060】
飛来する電波信号に基づいて自車位置を導出する機能としては、周囲にある無線LANアクセスポイントからの電測情報(各アクセスポイントに固有のMACアドレス及び電波強度の情報)を取得し、各アクセスポイントからの電波強度のバランスに基づいて自車位置を導出する構成が代表例として挙げられる。
【0061】
(2)上記実施の形態では、オルタネータノイズからエンジン回転数を導出する構成としたが、車両の故障診断ポートに接続したケーブルをコネクタ部23に接続し、コネクタ部23に入力される情報からエンジン回転数を取得する構成としてもよい。車両の故障診断ポートから取得する場合には、ギア位置の情報が車両によってはそもそも出力されておらず、また出力されていたとしてもそのフォーマットが公開されていないために解析が困難であるのに対し、エンジン回転数は多くの車種で取得可能であるため、公開された情報からエンジン回転数を容易に取得することができるからである。
【0062】
(3)気圧の変化から数時間後の天気予報を予測し、当該予測結果を報知する構成としても良い。
【0063】
(4)上記実施の形態では、ギア位置が変化してから所定時間が経過するまでの期間において加速度から速度を導出する構成としたが、前記期間においてもエンジン回転数から速度を導出する構成としても良い。
【0064】
(5)上記実施の形態では、気圧センサ29を備え、気圧が変化した場合に自車の位置情報を補正する構成としたが、当該機能を有さない構成としても良い。
【0065】
(6)上記実施の形態では、車両用警報装置10がデータベース32を備える構成としたが、車両用警報装置10ではなく外部サーバが有する構成としても良い。また、制御部31の機能の少なくとも一部を外部サーバにおいて実現する構成としても良い。
【0066】
(7)上記実施の形態では、車両用警報装置10が自車位置表示機能を有する場合を例として説明したが、ETC等の他の車載用電子機器に自車位置表示機能を設けることも可能である。
【符号の説明】
【0067】
10…車両用警報装置、11…本体部、12…表示装置、13…設定ボタン、14…選択ボタン、15…切替ボタン、16…リセットボタン、17…警報ランプ、18…赤外線通信機、19…ソーラーパネル、20…電源スイッチ、21…DCジャック、22…アダプタージャック、23…コネクタ部、24…無線受信機、25…マイクロ波受信機、26…GPS受信機、27…加速度センサ、28…ジャイロセンサ、29…気圧センサ、30…スピーカ、31…制御部、32…データベース。
【技術分野】
【0001】
本発明は、位置情報取得システム及びプログラムに関するものである。
【背景技術】
【0002】
車両に搭載される車載用電子機器としては、例えば車両用警報装置がある。車両用警報装置には、GPS衛星データに基づいて導出した自車の位置情報が予め記憶された車両速度測定装置の位置情報と接近した場合、所定の報知を行うものがある(例えば特許文献1参照)。このような車両用警報装置は、報知が行われた場合に自車が車両速度測定装置に接近していることを意味するため、速度超過に対する注意を喚起することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−41281号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS衛星データに基づいて自車の位置情報を導出する車両用警報装置では、トンネル内やビル街等でGPS衛星データを受信できなくなった場合、GPS衛星データに基づいて自車の位置情報を導出できなくなってしまう。このことは、例えばトンネルの出口付近に車両速度測定装置が設置されている状況等において、自車が車両速度測定装置に接近しているにも関わらず報知を行わない事象が発生することに繋がり得る。
【0005】
なお以上の問題は、車両用警報装置に限らず、車両に搭載される他の車載用電子機器にも該当する問題である。また、車載用電子機器に限らず、GPS衛星データ等の飛来する電波信号に基づいて位置情報を取得する位置情報取得システムにも該当する問題である。
【0006】
本発明は上記例示した事情等に鑑みてなされたものであり、車両の正確な位置情報を提供することが可能な位置情報取得システムを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
請求項1に記載の発明では、飛来する所定の電波信号を受信する電波信号受信部と、前記所定の電波信号に基づいて車両の位置情報を取得する位置情報第1取得手段と、前記車両のエンジンの回転数を取得する回転数取得手段と、加速度を取得する加速度取得手段と、前記回転数取得手段及び前記加速度取得手段の取得結果に基づいて、前記車両の変速装置のギア状態を識別するギア状態識別手段と、前記回転数取得手段の取得結果及び前記ギア状態識別手段の識別結果に基づいて、前記車両の走行速度を取得する走行速度取得手段と、前記所定の電波信号が受信不可能となった場合、前記車両の走行速度に基づいて前記車両の位置情報を取得する位置情報第2取得手段とを備えたことを特徴とする。
【0008】
本位置情報取得システムによれば、車両のエンジンの回転数を取得し、加速度の取得結果に基づいて車両の変速装置のギア状態を識別する。そして、取得したエンジンの回転数及び識別した変速装置のギア状態に基づいて、車両の走行速度を取得する。かかる構成とすることにより、所定の電波信号に基づいて車両の位置情報を取得できなくなった場合であっても、取得した車両の走行速度から車両の正確な位置情報を取得して提供することが可能となる。
【0009】
なお、ここにいう「取得」とは、「検出」,「導出」及び「算出」の意味も含むものである。すなわち、自らセンサ等によって検出して取得するものや、車両等の外部のセンサによって検出されたものを通信等によって取得するもの、検出して得られたものに所定の演算処理を行うことで取得するもの等を含む。以下も同じである。
【0010】
請求項2に記載の発明では、請求項1に記載の構成に加えて、車両電源に重畳されるオルタネータノイズを取得するノイズ取得手段を備え、前記回転数取得手段は、前記ノイズ取得手段の取得結果に基づいて前記エンジンの回転数を取得することを特徴とする。
【0011】
本位置情報取得システムによれば、車両電源に重畳されるオルタネータノイズに基づいてエンジンの回転数を取得するため、例えば、当該位置情報取得システムの電源を車両電源から取得する構成とすれば、取得する車両電源からエンジンの回転数も取得できる。したがって、電源の配線とは別にエンジンの回転数を取得するための配線等をしなくてもよく、位置情報取得システムのコストアップを抑制できるとともに、位置情報取得システムの車両への搭載作業を容易なものとすることが可能となる。
【0012】
請求項3に記載の発明では、請求項1又は請求項2に記載の構成に加えて、前記加速度取得手段の取得結果を積分して前記車両の走行速度を取得する走行速度第2取得手段と、前記車両の車両状態を判定する車両状態判定手段とを備え、前記位置情報第2取得手段は、前記車両状態判定手段の判定結果に基づいて、前記走行速度取得手段の取得した走行速度と、前記走行速度第2取得手段の取得した走行速度と、のいずれかに基づいて前記車両の位置情報を取得することを特徴とする。
【0013】
本位置情報取得システムによれば、所定の電波信号が受信不可能となった場合、取得したエンジンの回転数及びギア状態識別手段の識別結果に基づいて取得した走行速度と、加速度取得手段の取得結果を積分して取得した走行速度と、のいずれかに基づいて車両の位置情報を取得する。かかる構成とすることにより、所定の電波信号が受信不可能となった場合であっても車両の位置情報を正確に取得することが可能となる。
【0014】
車両状態の判定として具体的には、ギア状態が変化したか否か、ギア状態が変化してから所定時間を経過したか否か等を判定する構成が代表例として考えられる。
【0015】
請求項4に記載の発明では、請求項3に記載の構成に加えて、前記位置情報第2取得手段は、前記変速装置のギア状態が変化した場合、前記走行速度第2取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする。
【0016】
本位置情報取得システムによれば、変速装置のギア状態が変化した場合、加速度取得手段の取得結果を積分して取得した走行速度に基づいて車両の位置情報を取得する。変速装置のギア状態が変化する際にはエンジンの回転数が短時間に大きく変化し得るため、加速度取得手段の取得結果を積分して取得した走行速度に基づいて車両の位置情報を取得することにより、車両の位置情報を正確に取得することが可能となる。
【0017】
請求項5に記載の発明では、請求項3又は請求項4に記載の構成に加えて、前記位置情報第2取得手段は、前記変速装置のギア状態が変化してから所定期間を経過した場合、前記走行速度取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする。
【0018】
本位置情報取得システムによれば、変速装置のギア状態が変化してから所定期間を経過した場合、エンジンの回転数及び変速装置のギア状態から取得した走行速度を用いて車両の位置情報を取得する。変速装置のギア状態が変化してから所定期間を経過した場合には、エンジンの回転数変化が小さくなる一方、加速度取得手段の取得結果を積分して取得した走行速度と、車両の実際の走行速度と、の誤差が大きくなる。そこで、変速装置のギア状態が変化してから所定期間を経過した場合に走行速度取得手段の取得した走行速度に基づいて車両の位置情報を取得することにより、車両の位置情報を正確に取得することが可能となる。
【0019】
請求項6に記載の発明では、請求項1乃至請求項5のいずれかに記載の構成に加えて、前記車両の移動方向を取得する移動方向取得手段を備え、前記位置情報第2取得手段は、前記車両の走行速度と、前記移動方向取得手段の取得結果と、に基づいて前記車両の位置情報を取得することを特徴とする。
【0020】
本位置情報取得システムによれば、車両の走行速度と移動方向に基づいて車両の位置情報を取得するため、車両の位置情報を正確に取得することが可能となる。
【0021】
請求項7に記載の発明では、請求項1乃至請求項6のいずれかに記載の構成に加えて、大気圧を取得する大気圧取得手段を備え、前記位置情報第2取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする。
【0022】
本位置情報取得システムによれば、所定の電波信号が受信不可能となった場合、大気圧取得手段の取得結果に基づいて車両の位置情報を取得する。かかる構成とすることにより、例えば、トンネルへの進入に伴って所定の電波信号が受信不可能となり、その後に車両がトンネル外に移動した場合において、大気圧の変化からトンネル外に移動したことを速やかに取得することが可能となり、車両の位置情報を正確に取得することが可能となる。
【0023】
請求項8に記載の発明では、請求項7に記載の構成に加えて、前記位置情報第1取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする。
【0024】
本位置情報取得システムによれば、所定の電波信号が受信可能な状況においても大気圧取得手段の取得結果に基づいて車両の位置情報を取得する。かかる構成とすることにより、山間部を車両が走行している場合や、高速道路と一般道路が上下に並行して設けられた箇所を車両が走行している場合等において、車両の位置情報を正確に取得することが可能となる。
【0025】
請求項9に記載の発明では、飛来する所定の電波信号を受信する電波信号受信部と、大気圧を取得する大気圧取得手段と、前記所定の電波信号及び前記大気圧取得手段の取得結果に基づいて車両の位置情報を取得する位置情報取得手段とを備えたことを特徴とする。
【0026】
本位置情報取得システムによれば、所定の電波信号及び大気圧取得手段の取得結果に基づいて車両の位置情報を取得する。かかる構成とすることにより、山間部を車両が走行している場合や、高速道路と一般道路が上下に並行して設けられた箇所を車両が走行している場合等において、車両の位置情報を正確に取得することが可能となる。
【0027】
請求項10に記載の発明は、請求項1乃至請求項9のいずれかに記載の位置情報取得システムにおける機能をコンピュータに実現させるためのプログラムである。
【0028】
本位置情報取得システムの各手段は、その全てを車両内に備える構成が望ましいが、手段内の一部の機能を通信によってアクセス可能な車両外の機器で実施するようにしてもよい。また、本位置情報取得システムは、単一の筐体に格納した機器として構成してもよいし、複数の筐体に格納した機器として構成してもよい。
【発明の効果】
【0029】
所定の電波信号に基づいて車両の位置情報を取得できなくなった場合であっても、取得した車両の走行速度から車両の正確な位置情報を取得して提供することが可能となる。
【図面の簡単な説明】
【0030】
【図1】一実施の形態における車両用警報装置を示す図である。
【図2】車両用警報装置のブロック図である。
【図3】自車位置表示処理を示すフローチャートである。
【図4】速度導出処理を示すフローチャートである。
【図5】位置導出処理を示すフローチャートである。
【発明を実施するための形態】
【0031】
以下、位置情報取得システムを備えた車載用電子機器の一種である車両用警報装置に適用した場合の実施形態を説明する。
【0032】
図1は車両用警報装置10の構成を示す図である。車両用警報装置10は、本体部11を有している。本体部11の前面には、自車の位置情報等の各種情報を提供する表示装置12が設けられている。表示装置12は、小型液晶ディスプレイによって形成されている。表示装置12の下方には、中央部に設定ボタン13が配置されるとともに、当該設定ボタン13の四方を囲むようにして選択ボタン14が配置されている。設定ボタン13及び選択ボタン14は、例えば車両用警報装置10を車両(自車)に搭載した際に、その車種やタイヤ径等を登録すべく操作されるボタンである。選択ボタン14の左方には、表示装置12に表示される情報を切り替える際に操作される切替ボタン15が配置されており、選択ボタン14の右方には、リセットボタン16が配置されている。表示装置12の左右両側方には、車両速度測定装置の接近等を報知する警報ランプ17が配置されている。また、表示装置12の左方には、携帯電話機等の赤外線通信機を内蔵した外部装置とデータの送受信を行うための赤外線通信機18が配置されている。
【0033】
本体部10の上面には、中央から後部にかけてソーラーパネル19が配置されている。本体部11の右面には、電源スイッチ20とDCジャック21が配置されている。DCジャック21は、車両のシガーソケットに接続されたシガープラグコードを接続するためのものである。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。なお、本車両用警報装置10は、ソーラーパネル19を搭載しているため、前記シガープラグコードがDCジャック21に接続されなかった場合であってもソーラーパネル19に蓄えられた電力によって動作を行うことができる。本体部10の左面には、メモリーカードリーダ等の外部装置を接続するためのアダプタージャック22が配置されている。本体部11の下面には、例えば車両に備えられた車内LAN等に接続されたケーブルを接続可能なコネクタ部23が配置されている。
【0034】
本体部11の内部には、無線受信機24とマイクロ波受信機25が後部寄りに配置されており、GPS受信機26と加速度センサ27とジャイロセンサ28と気圧センサ29とが上部に配置されており、スピーカ30が前部に配置されている。無線受信機24は、緊急車両等の発する無線電波を受信するためのものであり、マイクロ波受信機25は、速度測定装置から出力される周波数帯のマイクロ波を受信するためのものである。
【0035】
次に、本車両用警報装置10の電気的構成について、図2のブロック図に基づいて説明する。
【0036】
制御部31は、車両用警報装置10の動作全般を制御する機能を有しており、CPU,ROM,RAM,I/O及びこれらを接続するバス等により構成されている。
【0037】
データベース32は、制御部31に内蔵された又は当該制御部31に外付けされた不揮発性メモリである。データベース32には、車両速度測定装置の位置に関わる情報の他に、地図情報や車種と対応した各ギア位置の係数等の各種情報が出荷時に記憶されている。
【0038】
制御部31の入力側には、設定ボタン13,選択ボタン14,切替ボタン15,リセットボタン16,電源スイッチ20,DCジャック21,コネクタ部23,無線受信機24,マイクロ波受信機25,GPS受信機26,加速度センサ27,ジャイロセンサ28,気圧センサ29が接続されている。なお、リモコン受信器を制御部31の入力側に接続し、リモコン(子機)を操作することで設定ボタン13等と同様の設定を行うことができる構成としても良い。制御部31の出力側には、表示装置12,警報ランプ17,スピーカ30が接続されている。また、赤外線通信機18及びアダプタージャック22は、制御部31と入出力可能に接続されている。
【0039】
DCジャック21は、車両から電源供給を受けて動作を行う場合に車両のシガーソケットに接続されたシガープラグコードと接続するためのものである。車両には、直流の電源とこれを充電するオルタネータ(交流発電機)が設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部31は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、公知の方法によってオルタネータノイズから車両のエンジン回転数を導出することができる。
【0040】
アダプタージャック22は、データベース32に記憶された地図情報等の各種情報を更新したり、制御部31やデータベース32のメモリに記憶された情報を外部に取り出したりする場合に用いられる接続部である。すなわち、アダプタージャック22にメモリーカードリーダ等の読み書き可能な外部装置を接続することにより、制御部31が、メモリーカードリーダに装着されたメモリーカード内のデータをデータベース32に取り込んだり、データベース32や制御部31のメモリに記憶されたデータをメモリーカードに書き込んだりする。なお、メモリーカードリーダを車両用警報装置10が備える構成としても良い。また、本車両用警報装置10は、赤外線通信機18によって上記データの送受信を行うことも可能である。
【0041】
制御部31は、周知のGPS警報機能,マイクロ波警報機能,無線警報機能の他に、自車の位置情報を表示する自車位置表示機能を備えている。そこで以下では、自車の位置情報を表示するにあたって制御部31が行う自車位置表示処理を、図3のフローチャートに基づいて説明する。
【0042】
ステップS101では、自車の速度を導出する速度導出処理を行う。
【0043】
速度導出処理では、図4のフローチャートに示すように、ステップS201にてオルタネータノイズからエンジン回転数を導出し、ステップS202にて導出したエンジン回転数を制御部31に設けられたエンジン回転数記憶エリア(図示略)に記憶する。制御部31のノイズ検出部は、エンジンに直結したオルタネータの出力を整流する整流部と、整流した後に残っている交流分を取り出すフィルタ部と、取り出した交流分を2値化してパルスを作る2値化回路部と、作成されたパルスをカウントするカウンタ部と、により構成されている。ステップS201では、ノイズ検出部のカウンタ部の出力をカウントし、ステップS202では、当該カウント結果をエンジン回転数記憶エリアに記憶する。エンジン回転数記憶エリアは所定期間のカウント結果を順次記憶できるようになっているため、制御部31は、エンジン回転数記憶エリアを参照することにより、エンジン回転数の時間的変化を把握することができる。ステップS203では、加速度センサ27の検出結果から自車の加速度を取得し、ステップS204では、取得した加速度を制御部31に設けられた加速度記憶エリア(図示略)に記憶する。
【0044】
ステップS205では、エンジン回転数及び加速度に基づいて、自車の変速装置のギア位置が変化したか否かを判定する。例えば、エンジン回転数が低下する一方で加速度が減速を示さなかった場合には、ギア位置が変化した(より詳しくはシフトアップした)と判定することができ、エンジン回転数が低下するとともに加速度が減速を示した場合には、自車が減速しているのであってギア位置は変化していないと判定することができる。ギア位置が変化したと判定した場合には、ステップS206に進み、制御部31に設けられたギア位置記憶エリア(図示略)にそのときのギア位置を記憶する。具体的には、ステップS205にてシフトアップしたと判定した場合には、ギア位置記憶エリアに記憶されているギア位置を1段上のギア位置に変更し、ステップS205にてシフトダウンしたと判定した場合には、ギア位置記憶エリアに記憶されているギア位置を1段下のギア位置に変更する。ステップS207では、ギア位置が変化したことを示す変化フラグをセットし、ステップS208では、ギア位置が変化してからの経過時間を把握すべくタイマ計測を開始する。ステップS209では、加速度を積分することによって自車の速度を導出する。その後、ステップS210にて制御部31に設けられた速度記憶エリア(図示略)にステップS209にて導出した速度を記憶し、本処理を終了する。
【0045】
ステップS205にてギア位置が変化していないと判定した場合には、ステップS211に進み、変化フラグがセットされているか否かを判定する。変化フラグがセットされている場合には、ステップS212に進み、タイマの値が予め定めた所定値に非到達であるか否か、すなわちギア位置が変化してから所定時間を経過していないか否かを判定する。所定時間を経過していない場合には、ステップS209に進み、加速度を積分することによって自車の速度を導出する。その後、ステップS210にて制御部31の速度記憶エリアにステップS209にて導出した速度を記憶し、本処理を終了する。なお、上記所定時間は、ギア位置が変化してからエンジン回転数が安定するまでに要する時間をデータベース32に車種毎に予め記憶させておいてもよいし、自車のエンジン回転数データから制御部31が学習して設定する構成としてもよい。
【0046】
ギア位置が変化してから所定時間を経過した場合には、ステップS213にて変化フラグをクリアするとともにステップS214にてタイマ計測を終了する。その後、ステップS215にてエンジン回転数から自車の速度を導出する。具体的には、エンジン回転数にギア位置の係数を乗算することで速度を導出する。ギア位置の係数は車両のギア比、タイヤ径によって求めることができるものであるため、本車両用警報装置10では、車両への新規取付時に車種及びタイヤ径の登録を要求するようになっている。エンジン回転数から自車の速度を導出した場合には、ステップS210にて制御部31の速度記憶エリアに導出した速度を記憶し、本処理を終了する。また、ステップS211にて変化フラグがセットされていないと判定した場合についても、ギア位置が変化してから所定時間を経過したことを意味するため、ステップS215にてエンジン回転数から自車の速度を導出するとともに、ステップS210にて制御部31の速度記憶エリアに導出した速度を記憶し、本処理を終了する。
【0047】
以上のように、速度導出処理では、ギア位置が変化してから所定時間を経過するまでの期間において、加速度から自車の速度を導出し、他の期間において、エンジン回転数から自車の速度を導出するようになっている。
【0048】
自車位置表示処理の説明に戻り、速度導出処理が終了した場合には、ステップS102に進み、自車の位置を導出する位置導出処理を行う。
【0049】
位置導出処理では、図5のフローチャートに示すように、ステップS301にて気圧センサ29の検出結果から気圧を取得し、ステップS302にて取得した気圧を制御部31に設けられた気圧記憶エリア(図示略)に記憶する。気圧記憶エリアは所定期間の取得結果を順次記憶できるようになっているため、制御部31は、気圧記憶エリアを参照することにより、気圧の時間的変化を把握することができる。ステップS303では、GPS測位可能であるか否か、すなわちGPSデータを受信できているか否かを判定する。GPS測位可能である場合には、ステップS304に進み、GPSデータから自車位置を導出する。一方、GPS測位不可能である場合には、ステップS305に進み、制御部32の速度記憶エリアに記憶されている速度から自車の移動距離を導出する。ステップS306では、ジャイロセンサ28の検出結果から自車の進行方向を取得する。ステップS307では、導出した移動距離及び進行方向から自車位置を導出する。
【0050】
自車位置を導出した後、ステップS308では、気圧が変化したか否かを判定する。気圧が変化していない場合には、そのまま本処理を終了し、気圧が変化した場合には、ステップS309にて自車位置を補正し、本処理を終了する。ステップS309の処理を行う効果について具体的に説明すると、GPS測位可能な状況で気圧が変化する場合としては、例えば山間部を車両が走行している場合や、一般動路から高速道路に移動すべく勾配のついた道路を車両が走行している場合が代表例として挙げられる。都市部等においては高速道路と一般道路が上下に並行して設けられた区間があり、当該区間を車両が走行している場合には、正確な情報を提供できなくなる可能性が生じ得る。具体的には、車両が一般道路を走行しているにも関わらずGPSデータに基づいて高速道路に設置された車両速度測定装置の接近を報知してしまったり、車両が高速道路を走行しているにも関わらず一般道路の走行を前提としたナビゲーションをしてしまったりする事象が発生し得る。そこで、本車両用警報装置10では、気圧が変化したことに基づいて高速道路に向かっていると認識して自車位置を補正する。当該補正を行うことにより、上記懸念を好適に解消しつつ正確な情報を提供することができる。また、GPS測位不可能な状況で気圧が変化する場合としては、車両がトンネルに進入した場合や、車両がトンネル外に移動した場合が代表例として挙げられる。高速道路等においては、トンネル出口の近傍に車両速度測定装置の設置されている区間がある。車両のトンネル進入時及びトンネル脱出時には気圧が急激に変化するため、気圧が変化したことに基づいて自車位置を補正することにより、前記区間を車両が走行する場合においても正確に車両速度測定装置の接近を報知することができる。
【0051】
自車位置表示処理の説明に戻り、位置導出処理が終了した場合には、ステップS103にて自車位置を表示装置12に表示し、本処理を終了する。
【0052】
以上詳述した本実施の形態によれば、以下の優れた効果を奏する。
【0053】
GPS測位不可能な場合には、ジャイロセンサから取得した進行方向と、導出した車両の速度と、によって自車位置を導出する構成とした。かかる構成とすることにより、GPS測位不可能となった場合であっても、正確な自車位置を表示したり、当該自車位置に基づいて車両速度測定装置の接近を報知したりすることができる。
【0054】
オルタネータノイズからエンジン回転数を導出するとともに、導出したエンジン回転数及び加速度からギア位置を把握し、これらに基づいて車両の速度を導出する構成とした。確かに、車両の車軸に車速センサを設ける構成とすれば、正確な車両の速度や移動距離を得ることが可能である。しかしながら、かかる構成とした場合には、車両用警報装置のコストアップに繋がるのみならず、車両用警報装置の車両への搭載が煩雑なものとなってしまう。一方、オルタネータノイズからエンジン回転数を導出するとともに、導出したエンジン回転数及び加速度からギア位置を把握し、これらに基づいて車両の速度を導出する構成とした場合には、DCジャック21に車両のシガーソケットに接続されたシガープラグコードを接続すれば良いため、車両用警報装置10のコストアップを抑制するとともに車両への搭載を容易なものとすることが可能となる。
【0055】
また、エンジン回転数に基づいて速度を導出する構成とすることにより、GPS衛星データが受信不可能となった場合であっても車両の位置情報を正確に導出することが可能となる。確かに、オルタネータノイズからエンジン回転数を導出しない構成とするとともに、加速度センサの検出結果から自車の加速度を取得して速度を常時導出する構成とすることも可能である。しかしながら、かかる構成とした場合には、車両が上り坂等の勾配のついた道路を走行している状況において速度を導出するための演算が複雑なものとなり、車両の実速度との誤差が大きくなる可能性がある。また、車両の移動距離を導出するためには加速度を2回積分しなければならないため、加速度に基づく移動距離の導出を長時間行った場合には、車両の実移動距離との誤差が大きくなる可能性がある。一方、エンジン回転数に基づいて速度を導出する構成とした場合には、上記各懸念を好適に解消することが可能となる。
【0056】
ギア位置が変化してから所定時間を経過するまでの期間では、加速度から自車の速度を導出し、他の期間では、エンジン回転数から自車の速度を導出する構成とした。加速度から自車の速度を導出する構成においては上述した懸念が生じる一方、エンジン回転数に基づいて速度を導出する構成においては、時間あたりのエンジン回転数の変化が大きい状況において車両の実速度との誤差が大きくなる可能性がある。時間あたりのエンジン回転数の変化が大きい状況としては、ギア位置が変化する状況が代表例として挙げられる。そこで、ギア位置が変化してから所定時間を経過するまでの期間において加速度から自車の速度を導出し、他の期間においてエンジン回転数から自車の速度を導出する構成とすることにより、各期間における車両の実速度との誤差を小さくすることが可能となり、GPS衛星データが受信不可能となった場合であっても車両の位置情報を正確に導出することが可能となる。
【0057】
メモリーカードリーダ等の外部装置を接続するためのアダプタージャック22を設けたため、データベース32に記憶された各種情報を新たな情報に更新することができる。この結果、例えばデータベース32に記憶されていない最新型の車両に車両用警報装置10を搭載する場合であっても、前記最新型の車両のギア比の係数等をデータベース32に新たに記憶させることで車両の位置情報を正確に導出することが可能となる。
【0058】
なお、上述した各実施の形態の記載内容に限定されず、例えば次のように実施してもよい。
【0059】
(1)上記実施の形態では、GPSデータに基づいて自車位置を導出する機能と、速度に基づいて自車位置を導出する機能と、を備えた構成について説明したが、飛来する電波信号に基づいて自車位置を導出する機能と、速度に基づいて自車位置を導出する機能と、を備えた構成であっても、上記実施の形態と同様の作用効果を奏することが期待できる。
【0060】
飛来する電波信号に基づいて自車位置を導出する機能としては、周囲にある無線LANアクセスポイントからの電測情報(各アクセスポイントに固有のMACアドレス及び電波強度の情報)を取得し、各アクセスポイントからの電波強度のバランスに基づいて自車位置を導出する構成が代表例として挙げられる。
【0061】
(2)上記実施の形態では、オルタネータノイズからエンジン回転数を導出する構成としたが、車両の故障診断ポートに接続したケーブルをコネクタ部23に接続し、コネクタ部23に入力される情報からエンジン回転数を取得する構成としてもよい。車両の故障診断ポートから取得する場合には、ギア位置の情報が車両によってはそもそも出力されておらず、また出力されていたとしてもそのフォーマットが公開されていないために解析が困難であるのに対し、エンジン回転数は多くの車種で取得可能であるため、公開された情報からエンジン回転数を容易に取得することができるからである。
【0062】
(3)気圧の変化から数時間後の天気予報を予測し、当該予測結果を報知する構成としても良い。
【0063】
(4)上記実施の形態では、ギア位置が変化してから所定時間が経過するまでの期間において加速度から速度を導出する構成としたが、前記期間においてもエンジン回転数から速度を導出する構成としても良い。
【0064】
(5)上記実施の形態では、気圧センサ29を備え、気圧が変化した場合に自車の位置情報を補正する構成としたが、当該機能を有さない構成としても良い。
【0065】
(6)上記実施の形態では、車両用警報装置10がデータベース32を備える構成としたが、車両用警報装置10ではなく外部サーバが有する構成としても良い。また、制御部31の機能の少なくとも一部を外部サーバにおいて実現する構成としても良い。
【0066】
(7)上記実施の形態では、車両用警報装置10が自車位置表示機能を有する場合を例として説明したが、ETC等の他の車載用電子機器に自車位置表示機能を設けることも可能である。
【符号の説明】
【0067】
10…車両用警報装置、11…本体部、12…表示装置、13…設定ボタン、14…選択ボタン、15…切替ボタン、16…リセットボタン、17…警報ランプ、18…赤外線通信機、19…ソーラーパネル、20…電源スイッチ、21…DCジャック、22…アダプタージャック、23…コネクタ部、24…無線受信機、25…マイクロ波受信機、26…GPS受信機、27…加速度センサ、28…ジャイロセンサ、29…気圧センサ、30…スピーカ、31…制御部、32…データベース。
【特許請求の範囲】
【請求項1】
飛来する所定の電波信号を受信する電波信号受信部と、
前記所定の電波信号に基づいて車両の位置情報を取得する位置情報第1取得手段と、
前記車両のエンジンの回転数を取得する回転数取得手段と、
加速度を取得する加速度取得手段と、
前記回転数取得手段及び前記加速度取得手段の取得結果に基づいて、前記車両の変速装置のギア状態を識別するギア状態識別手段と、
前記回転数取得手段の取得結果及び前記ギア状態識別手段の識別結果に基づいて、前記車両の走行速度を取得する走行速度取得手段と、
前記所定の電波信号が受信不可能となった場合、前記車両の走行速度に基づいて前記車両の位置情報を取得する位置情報第2取得手段と
を備えたことを特徴とする位置情報取得システム。
【請求項2】
車両電源に重畳されるオルタネータノイズを取得するノイズ取得手段を備え、
前記回転数取得手段は、前記ノイズ取得手段の取得結果に基づいて前記エンジンの回転数を取得することを特徴とする請求項1に記載の位置情報取得システム。
【請求項3】
前記加速度取得手段の取得結果を積分して前記車両の走行速度を取得する走行速度第2取得手段と、
前記車両の車両状態を判定する車両状態判定手段と
を備え、
前記位置情報第2取得手段は、前記車両状態判定手段の判定結果に基づいて、前記走行速度取得手段の取得した走行速度と、前記走行速度第2取得手段の取得した走行速度と、のいずれかに基づいて前記車両の位置情報を取得することを特徴とする請求項1又は請求項2に記載の位置情報取得システム。
【請求項4】
前記位置情報第2取得手段は、前記変速装置のギア状態が変化した場合、前記走行速度第2取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする請求項3に記載の位置情報取得システム。
【請求項5】
前記位置情報第2取得手段は、前記変速装置のギア状態が変化してから所定期間を経過した場合、前記走行速度取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする請求項3又は請求項4に記載の位置情報取得システム。
【請求項6】
前記車両の移動方向を取得する移動方向取得手段を備え、
前記位置情報第2取得手段は、前記車両の走行速度と、前記移動方向取得手段の取得結果と、に基づいて前記車両の位置情報を取得することを特徴とする請求項1乃至請求項5のいずれかに記載の位置情報取得システム。
【請求項7】
大気圧を取得する大気圧取得手段を備え、
前記位置情報第2取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする請求項1乃至請求項6のいずれかに記載の位置情報取得システム。
【請求項8】
前記位置情報第1取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする請求項7に記載の位置情報取得システム。
【請求項9】
飛来する所定の電波信号を受信する電波信号受信部と、
大気圧を取得する大気圧取得手段と、
前記所定の電波信号及び前記大気圧取得手段の取得結果に基づいて車両の位置情報を取得する位置情報取得手段と
を備えたことを特徴とする位置情報取得システム。
【請求項10】
請求項1乃至請求項9のいずれかに記載の位置情報取得システムにおける機能をコンピュータに実現させるためのプログラム。
【請求項1】
飛来する所定の電波信号を受信する電波信号受信部と、
前記所定の電波信号に基づいて車両の位置情報を取得する位置情報第1取得手段と、
前記車両のエンジンの回転数を取得する回転数取得手段と、
加速度を取得する加速度取得手段と、
前記回転数取得手段及び前記加速度取得手段の取得結果に基づいて、前記車両の変速装置のギア状態を識別するギア状態識別手段と、
前記回転数取得手段の取得結果及び前記ギア状態識別手段の識別結果に基づいて、前記車両の走行速度を取得する走行速度取得手段と、
前記所定の電波信号が受信不可能となった場合、前記車両の走行速度に基づいて前記車両の位置情報を取得する位置情報第2取得手段と
を備えたことを特徴とする位置情報取得システム。
【請求項2】
車両電源に重畳されるオルタネータノイズを取得するノイズ取得手段を備え、
前記回転数取得手段は、前記ノイズ取得手段の取得結果に基づいて前記エンジンの回転数を取得することを特徴とする請求項1に記載の位置情報取得システム。
【請求項3】
前記加速度取得手段の取得結果を積分して前記車両の走行速度を取得する走行速度第2取得手段と、
前記車両の車両状態を判定する車両状態判定手段と
を備え、
前記位置情報第2取得手段は、前記車両状態判定手段の判定結果に基づいて、前記走行速度取得手段の取得した走行速度と、前記走行速度第2取得手段の取得した走行速度と、のいずれかに基づいて前記車両の位置情報を取得することを特徴とする請求項1又は請求項2に記載の位置情報取得システム。
【請求項4】
前記位置情報第2取得手段は、前記変速装置のギア状態が変化した場合、前記走行速度第2取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする請求項3に記載の位置情報取得システム。
【請求項5】
前記位置情報第2取得手段は、前記変速装置のギア状態が変化してから所定期間を経過した場合、前記走行速度取得手段の取得した走行速度に基づいて前記車両の位置情報を取得することを特徴とする請求項3又は請求項4に記載の位置情報取得システム。
【請求項6】
前記車両の移動方向を取得する移動方向取得手段を備え、
前記位置情報第2取得手段は、前記車両の走行速度と、前記移動方向取得手段の取得結果と、に基づいて前記車両の位置情報を取得することを特徴とする請求項1乃至請求項5のいずれかに記載の位置情報取得システム。
【請求項7】
大気圧を取得する大気圧取得手段を備え、
前記位置情報第2取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする請求項1乃至請求項6のいずれかに記載の位置情報取得システム。
【請求項8】
前記位置情報第1取得手段は、前記大気圧取得手段の取得結果に基づいて前記車両の位置情報を取得することを特徴とする請求項7に記載の位置情報取得システム。
【請求項9】
飛来する所定の電波信号を受信する電波信号受信部と、
大気圧を取得する大気圧取得手段と、
前記所定の電波信号及び前記大気圧取得手段の取得結果に基づいて車両の位置情報を取得する位置情報取得手段と
を備えたことを特徴とする位置情報取得システム。
【請求項10】
請求項1乃至請求項9のいずれかに記載の位置情報取得システムにおける機能をコンピュータに実現させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−159446(P2012−159446A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−20343(P2011−20343)
【出願日】平成23年2月2日(2011.2.2)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年2月2日(2011.2.2)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]