
位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラム
【課題】測位精度を維持しつつ、携帯端末のバッテリー消費を低減する。
【解決手段】進行方向の上空の見通しの度合いを推測し、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、その選択された測位方法に基づいて、位置情報を取得することにより、測位精度を維持しつつ、携帯端末のバッテリー消費を従来よりも低減させる位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラムを提供する。
【解決手段】進行方向の上空の見通しの度合いを推測し、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、その選択された測位方法に基づいて、位置情報を取得することにより、測位精度を維持しつつ、携帯端末のバッテリー消費を従来よりも低減させる位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置あるいは進行方向周辺地物や建造物に基づく、上空の見通しの度合いに応じて、測位手法を最適な測位方法に適宜切り替える位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラムに関する。
【背景技術】
【0002】
近年、乗用車などの車両に対してナビゲーション装置が普及している。かかるナビゲーション装置は、車両の運転室に設置され、GPS(Grobal Positionig System)などを利用してこの車両の位置(自車位置)や走行方向を表わす情報(以下、GPS情報という)を取得し、表示画面上に地図とその地図上で車両を目的地までの経路とを表示するとともに、この経路上に自車位置を示すカーマークを表示するものである(例えば、特許文献1参照)。
【0003】
また、このGPS測位系に加えて、角速度センサに基づく自律測位系を備えたハイブリッド構成のナビゲーション装置も普及している。こうしたハイブリッド構成のナビゲーション装置では、GPS測位、あるいは上空見通しの悪い環境においてはセンサ情報との連携測位、またはセンサ情報のみの自律航法により自装置の位置を計算する。これにより、GPS単独での測位に比べ、測位精度の向上が図れる(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−304090号公報
【特許文献2】特開2003−247833号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の装置では、センサ情報とGPS測位系とを連携させることにより連携部分の演算処理やGPS信号が補足できない領域でのセンサ情報による自律航法の演算処理が追加で発生する。そのため、パーソナルコンピュータと比較して計算処理能力が低くバッテリー駆動である携帯機器などの装置においては、このような処理負荷、および処理に伴うバッテリー消費の低減が課題となる。
【0006】
そこで、本発明は、上述の課題に鑑みてなされたものであり、測位精度を維持しつつ、バッテリー消費を低減できる位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上記の課題を解決するために、以下の事項を提案している。
【0008】
(1)本発明は、進行方向の上空の見通しの度合いを推測する見通し度合い推測手段と、該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、を備えたことを特徴とする位置情報取得装置を提案している。
【0009】
この発明によれば、見通し度合い推測手段は、進行方向の上空の見通しの度合いを推測する。測位方法選択手段は、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、位置情報取得手段は、その選択された測位方法に基づいて、位置情報を取得する。したがって、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0010】
(2)本発明は、(1)の位置情報取得装置について、前記見通し度合い推測手段が、地図を所定のブロックに分割し、該分割したブロックごとに、それぞれのブロック内に存在する地物、建造物から各ブロックの上空の見通し度合いを推測することを特徴とする位置情報取得装置を提案している。
【0011】
この発明によれば、見通し度合い推測手段は、地図を所定のブロックに分割し、その分割したブロックごとに、それぞれのブロック内に存在する地物、建造物から各ブロックの上空の見通し度合いを推測する。したがって、各ブロックに存在する地物や建造物の大きさや高さ等の情報から上空の見通し度合いを推測するため、確度の高い推定が期待できる。
【0012】
(3)本発明は、(2)の位置情報取得装置について、前記見通し度合い推測手段が、前記各ブロックの上空の見通し度合いを数値化し、測位方法に対応づけたデータベースを構築することを特徴とする位置情報取得装置を提案している。
【0013】
この発明によれば、見通し度合い推測手段は、各ブロックの上空の見通し度合いを数値化し、測位方法に対応づけたデータベースを構築する。したがって、このデータベースを用いることにより、即座に現在あるいは進行方向のブロックにおける適切な測位方法を抽出することができる。
【0014】
(4)本発明は、(3)の位置情報取得装置について、前記見通し度合い推測手段が、前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により上空の見通し度合いを数値化して、データベースを構築することを特徴とする位置情報取得装置を提案している。
【0015】
この発明によれば、見通し度合い推測手段は、各ブロックの面積に対する地物、建造物が占有する面積の比率により上空の見通し度合いを数値化して、データベースを構築する。したがって、上記の比率を2値化する、あるいは、予め設定した閾値に対する離散の度合いから上空の見通し度合いを数値化することにより、簡易な演算処理で正確なデータベースを構築することができる。
【0016】
(5)本発明は、(1)の位置情報取得装置について、前記測位方法選択手段が、少なくともGPS単独測位、センサ情報とGPSとの連携測位、センサ情報のみの自律測位の中から前記見通しの度合いに応じた測位方法を適宜選択することを特徴とする位置情報取得装置を提案している。
【0017】
この発明によれば、測位方法選択手段は、少なくともGPS単独測位、センサ情報とGPSとの連携測位、センサ情報のみの自律測位の中から見通しの度合いに応じた測位方法を適宜選択する。したがって、特殊な測位方法を用いることなく、既存の測位方法を組み合わせることによって、状況に応じた正確な位置情報を取得することができる。
【0018】
(6)本発明は、(5)の位置情報取得装置について、前記センサ情報を提供するセンサが少なくとも加速度センサ、ジャイロを含むことを特徴とする位置情報取得装置を提案している。
【0019】
この発明によれば、センサ情報を提供するセンサが少なくとも加速度センサ、ジャイロを含む。したがって、加速度センサにより移動距離を推定し、ジャイロにより回転角を推定することができる。
【0020】
(7)本発明は、(6)の位置情報取得装置について、前記センサの駆動を制御する駆動制御手段と、進行方向を検出する進行方向検出手段と、を備え、前記進行方向検出手段が、前記見通し度合い推測手段によって、進行方向が上空の見通し度合いが悪いブロックに向かっていることを検出したときに、前記駆動制御手段が、前記上空の見通し度合いが悪いブロックに進入する前から前記センサを駆動することを特徴とする位置情報取得装置を提案している。
【0021】
この発明によれば、駆動制御手段は、センサの駆動を制御する。進行方向検出手段は、進行方向を検出する。そして、進行方向検出手段が、見通し度合い推測手段によって、進行方向が上空の見通し度合いが悪いブロックに向かっていることを検出したときに、駆動制御手段が、上空の見通し度合いが悪いブロックに進入する前からセンサを駆動する。したがって、駆動制御手段が、上空の見通し度合いが悪いブロックに進入する前からセンサを駆動するため、上空の見通し度合いが悪いブロックにおいても位置情報の取得精度を向上させることができる。
【0022】
(8)本発明は、地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムであって、前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する配信手段を備え、前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、を備えたことを特徴とする位置情報取得システムを提案している。
【0023】
この発明によれば、地図情報配信サーバの配信手段は、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとを配信する。一方、位置情報取得装置の測位方法選択手段は、地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択し、位置情報取得手段は、その選択された測位方法に基づいて、位置情報を取得する。したがって、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【0024】
(9)本発明は、進行方向の上空の見通しの度合いを推測する第1のステップと、該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、を備えたことを特徴とする位置情報取得方法を提案している。
【0025】
この発明によれば、進行方向の上空の見通しの度合いを推測し、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、その選択された測位方法に基づいて、位置情報を取得する。したがって、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0026】
(10)本発明は、地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法であって、前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、を備えたことを特徴とする位置情報取得方法を提案している。
【0027】
この発明によれば、地図情報配信サーバは、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとを配信する。一方、位置情報取得装置は、地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択し、その選択された測位方法に基づいて、位置情報を取得する。したがって、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【0028】
(11)コンピュータに、進行方向の上空の見通しの度合いを推測する第1のステップと、該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、を実行させるためのプログラムを提案している。
【0029】
この発明によれば、進行方向の上空の見通しの度合いを推測し、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、その選択された測位方法に基づいて、位置情報を取得する。したがって、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0030】
(12)本発明は、地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法をコンピュータに実行させるためのプログラムであって、前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、をコンピュータに実行させるためのプログラムを提案している。
【0031】
この発明によれば、地図情報配信サーバは、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとを配信する。一方、位置情報取得装置は、地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択し、その選択された測位方法に基づいて、位置情報を取得する。したがって、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【発明の効果】
【0032】
本発明によれば、センサ情報を用いた測位に伴う演算処理量の増分を現在位置あるいは進行方向の周辺地物、建造物の情報に応じて低減することができるため、携帯機器に測位機能を搭載した場合であってもバッテリセーブの効果が期待できる。
【図面の簡単な説明】
【0033】
【図1】第1の実施形態に係る位置情報取得装置の概略構成を示す図である。
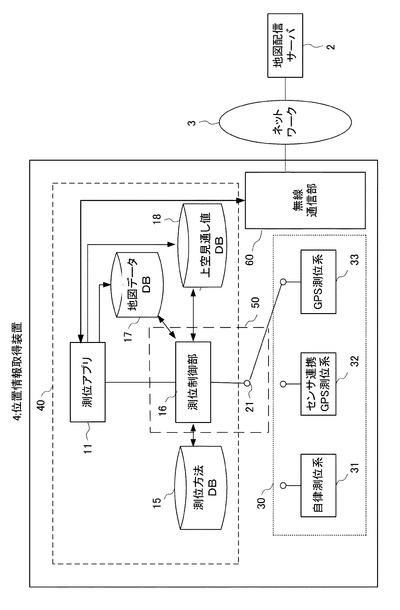
【図2】第1の実施形態に係る位置情報取得装置の詳細な構成を示す図である。
【図3】第1の実施形態に係る地図データと分割された区画ごとの上空の見通し値との関係を示した図である。
【図4】第1の実施形態に係る上空の見通し値と測位方法との対応関係を示した図である。
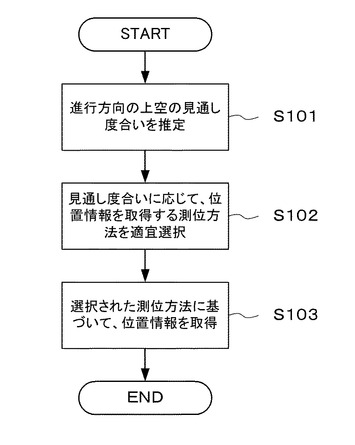
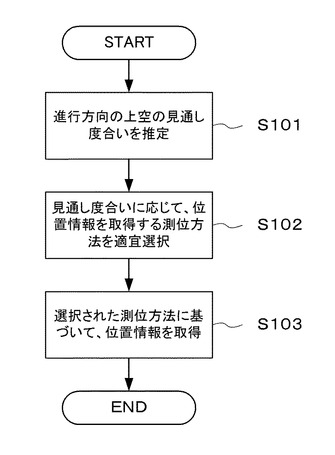
【図5】第1の実施形態に係る位置情報取得装置の処理フローである。
【図6】第2の実施形態に係る位置情報取得システムのシステム構成を示す図である。
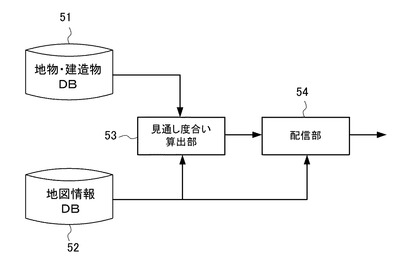
【図7】第2の実施形態に係る地図配信サーバの構成図である。
【図8】第2の実施形態に係る位置情報取得システムの処理フローである。
【発明を実施するための形態】
【0034】
以下、図面を用いて、本発明の実施形態について詳細に説明する。
なお、本実施形態における構成要素は適宜、既存の構成要素等との置き換えが可能であり、また、他の既存の構成要素との組み合わせを含む様々なバリエーションが可能である。したがって、本実施形態の記載をもって、特許請求の範囲に記載された発明の内容を限定するものではない。
【0035】
<第1の実施形態>
図1から図5を参照して、本発明の第1の実施形態について説明する。なお、以下では、本発明の位置情報取得装置が、携帯端末に搭載される場合を例にとって説明する。また、その前提条件として、位置情報取得装置には、GPS受信機やセンサ(加速度センサ、ジャイロ等)が実装されており、ナビゲーション用のアプリケーションがインストールされ、ナビゲーション時の地図情報は、装置内の地図データDB(データベース)および上空の見通しDBより随時取得するものとする。
【0036】
<位置情報取得装置の構成>
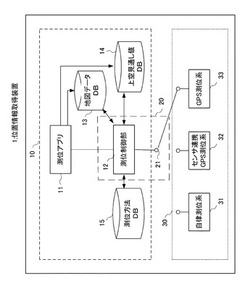
本実施形態に係る位置情報取得装置は、図1に示すように、大きく、見通し度合い推測部10と、測位方法選択部20と、位置情報取得部30とから構成されている。
【0037】
ここで、見通し度合い推測部10は、進行方向の上空の見通しの度合いを推測する。測位方法選択部20は、見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。また、位置情報取得部30は、選択された測位方法に基づいて、位置情報を取得する。
【0038】
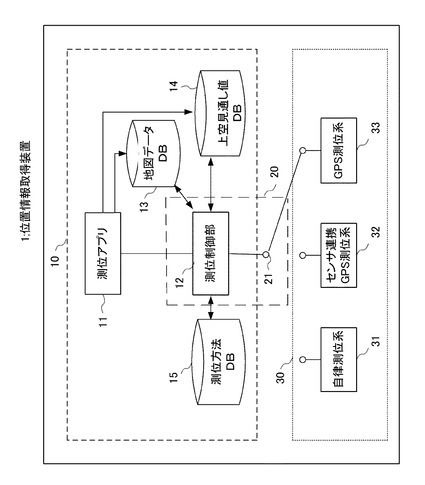
上記、各構成要素の詳細な内部構成を図2に示す。図2に示すように、見通し度合い推測部10は、測位アプリ11と、測位制御部12と、地図データDB13と、上空の見通し値DB14と、測位方法DB15とから構成されている。
【0039】
ここで、測位アプリ11は、ナビゲーション用のアプリケーションである。測位制御部12は、位置情報取得装置1全体の動作を制御するための制御プログラムに従って、制御を行う。具体的には、見通し度合い推測に関する一連の処理や測位方法の選択を実行する。
【0040】
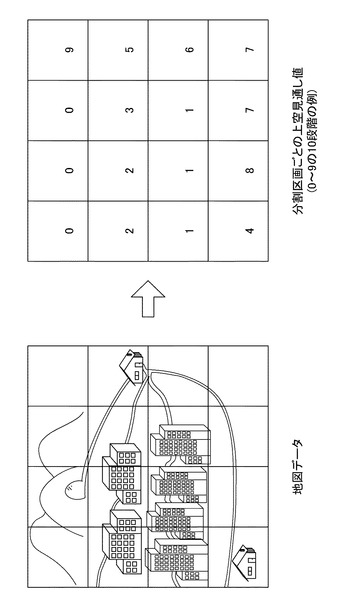
地図データDB13は、ナビゲーション用の地図データを格納する記憶装置である。本実施形態では、予めナビゲーション用の地図データが格納されている。なお、格納する地図データは、携帯端末の記憶容量を考慮して、すべての地図データを格納するのではなく、予め地図情報配信サーバから必要なエリアの地図データのみをダウンロードしてもよい。上空の見通し値DB14は、図3に示すように、地図データの所定のサイズに分割したブロックごとの上空の見通し値がブロックに対応付けられて格納されている。なお、図3は、上空見通し値が0から9の10段階評価の場合を例示している。
【0041】
具体的には、位置情報取得装置1には、予め、各ブロックごとの地物や建造物の情報(高さ、幅、奥行き、属性等)に関する情報が設定されており、前述した測位制御部12が、設定されている各ブロックごとの地物や建造物の情報に基づいて、例えば、各ブロックに対して、予め設定された閾値を超過する高さの地物や建造物が占有する面積が単位面積当たりに占める割合を予め設定された面積率と比較することにより、上空の見通し良し悪しを2値のデータ、あるいは、面積率からの離散の度合いに応じた数値として算出し、上空の見通し値DB14内に格納する。
【0042】
測位方法DB15は、図4に示すような上空見通し値と測位方法とを関連付けて格納する記憶装置である。
【0043】
つまり、測位制御部12は、後述する測位方法により測位された現在位置と地図データDB13に格納された地図データとを比較することにより、現在存在するブロックを検出し、さらに、検出したブロックに基づいて、上空の見通し値DB14から上空の見通し値を検索し、検索した上空の見通し値に基づいて、測位方法DB15から最適な測位方法を選択する。
【0044】
測位方法選択部20は、図2に示すように、測位制御部12と、切り替えスイッチ21とから構成されている。
【0045】
測位制御部12は、測位方法DB15から最適な測位方法を選択し、切り替えスイッチ21を駆動して、測位方法を切り替える。なお、測位制御部12は、携帯端末の移動速度に応じて測位手法判定の間隔を調整する。ここで、移動速度の推定は、例えば、前回測位位置と現在位置との差分および測位間隔(時間)を元に算出することができる。
【0046】
位置情報取得部30は、図2に示すように、自律測位系31と、センサ連携GPS測位系32と、GPS測位系33とから構成されている。
【0047】
自律測位系31とは、加速度センサやジャイロ等のセンサを用いて、進行方向と距離を推定する測位方法であり、トンネルの中や高層ビルの谷間など、GPS測位が機能しない場所で用いられる。
【0048】
センサ連携GPS測位系32とは、GPS受信機による測位と加速度センサやジャイロ等のセンサによる測位を連携させたものであり、GPS受信機による測位間隔をセンサによる測位で補うものである。
【0049】
GPS測位系33とは、アメリカ合衆国が軍事用に打ち上げた約30個のGPS衛星のうち、上空にある数個の衛星からの信号をGPS受信機で受け取り、現在位置を知るシステムである。GPS衛星からの信号には、衛星に搭載された原子時計からの時刻のデータ、衛星の軌道情報などが含まれている。GPS受信機にも正確な時刻を知ることができる時計が搭載されているならば、GPS衛星からの電波を受信し、発信-受信の時刻差に電波の伝播速度(光の速度と同じ30万km/秒)を掛けることによって、その衛星からの距離がわかる。3個のGPS衛星からの距離がわかれば、空間上の一点は決定できる。
【0050】
<位置情報取得装置の処理>
図5を用いて、位置情報取得装置の処理について説明する。
まず、見通し度合い推測部10は、進行方向の上空の見通しの度合いを推測する(ステップS101)。具体的には、位置情報取得装置1には、予め、各ブロックごとの地物や建造物の情報(高さ、幅、奥行き、属性等)に関する情報が設定されており、前述した測位制御部12が、設定されている各ブロックごとの地物や建造物の情報に基づいて、例えば、各ブロックに対して、予め設定された閾値を超過する高さの地物や建造物が占有する面積が単位面積当たりに占める割合を予め設定された面積率と比較することにより、上空の見通し良し悪しを2値のデータ、あるいは、面積率からの離散の度合いに応じた数値として算出し、上空の見通し値DB14内に格納する。
【0051】
測位方法選択部20は、見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する(ステップS102)。具体的には、測位制御部12は、後述する測位方法により測位された現在位置と地図データDB13に格納された地図データとを比較することにより、現在存在するブロックを検出し、さらに、検出したブロックに基づいて、上空の見通し値DB14から上空の見通し値を検索し、検索した上空の見通し値に基づいて、測位方法DB15から最適な測位方法を選択する。
【0052】
そして、位置情報取得部30は、選択された測位方法に基づいて、位置情報を取得する(ステップS103)。
【0053】
したがって、本実施形態によれば、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0054】
<第2の実施形態>
図6から図8を用いて、本発明の第2の実施形態について説明する。なお、以下では、本発明の位置情報取得装置が、携帯端末に搭載される場合を例にとって説明する。また、その前提条件として、位置情報取得装置には、GPS受信機やセンサ(加速度センサ、ジャイロ等)が実装されており、ナビゲーション用のアプリケーションがインストールされ、ナビゲーション時の地図情報は、ネットワーク側の地図データ配信サーバより随時ダウンロードして得られるものとする。
【0055】
<位置情報取得システムの構成>
本実施形態に係る位置情報取得システムは、図6に示すように、地図配信サーバ2と、位置情報取得装置4とから構成され、これらはネットワーク3を介して接続されている。
【0056】
<位置情報取得装置の構成>
位置情報取得装置4は、図6に示すように、大きく、見通し度合い推測部40と、測位方法選択部50と、位置情報取得部30とから構成されている。なお、それぞれの機能は、第1の実施形態とほぼ同様であるため、ここでは、相違点のみを説明する。
【0057】
図6に示すように、見通し度合い推測部40は、測位アプリ11と、測位制御部16と、地図データDB17と、上空の見通し値DB18と、測位方法DB15とから構成されている。
【0058】
ここで、測位制御部16は、位置情報取得装置4全体の動作を制御するための制御プログラムに従って、制御を行う。具体的には、地図配信サーバ2から配信される情報に基づいて、見通し度合い推測に関する一連の処理や測位方法の選択を実行する。
【0059】
地図データDB17は、ナビゲーション用の地図データを格納する記憶装置である。本実施形態では、地図配信サーバ2から配信される地図データが格納されている。なお、地図配信サーバ2からの地図データの配信は、測位アプリ11からの要求に応じて、ネットワーク3および無線通信部60を介して実行される。上空の見通し値DB18は、地図配信サーバ2から地図データが配信される際に、同時に配信される図3に示すような地図データの所定のサイズに分割したブロックごとの上空の見通し値をブロックに対応付けて格納する。
【0060】
測位方法選択部50は、図6に示すように、測位制御部16と、切り替えスイッチ21とから構成されている。
【0061】
測位制御部16は、上空の見通し値DB18の情報に基づいて、測位方法DB15から最適な測位方法を選択し、切り替えスイッチ21を駆動して、測位方法を切り替える。なお、測位制御部16は、携帯端末の移動速度に応じて測位手法判定の間隔を調整する。ここで、移動速度の推定は、例えば、前回測位位置と現在位置との差分および測位間隔(時間)を元に算出することができる。
【0062】
<地図配信サーバの構成>
図7に示すように、地図配信サーバは、地物・建造物DB51と、地図情報DB52と、見通し度合い算出部53と、配信部54とから構成されている。
【0063】
地物・建造物DB51は、地図情報を所定の単位に分割した各ブロック内の地物や建造物の情報を格納する記憶装置である。地図情報DB52は、地図情報を所定の単位に分割した各ブロックの地図データを格納する記憶装置である。
【0064】
見通し度合い算出部53は、地物・建造物DB51の情報に基づいて、各ブロックにおける上空の見通し度合いを算出する。具体的には、地物・建造物DB51に予め、設定されている各ブロックごとの地物や建造物の情報(高さ、幅、奥行き、属性等)に関する情報に基づいて、例えば、各ブロックに対して、予め設定された閾値を超過する高さの地物や建造物が占有する面積が単位面積当たりに占める割合を予め設定された面積率と比較することにより、上空の見通し良し悪しを2値のデータ、あるいは、面積率からの離散の度合いに応じた数値として算出する。
【0065】
配信部54は、位置情報取得装置4内の測位アプリ11からの要求に基づいて、地図情報DB52から検索した所望のブロックの地図情報と見通し度合い算出部53が算出したこのブロックにおける上空の見通し度合い値をネットワーク3を介して、位置情報取得装置4内の測位アプリ11に配信する。
【0066】
<位置情報取得システムの処理>
図8を用いて、位置情報取得システムの処理について説明する。
まず、地図配信サーバ2の見通し度合い算出部53が、位置情報取得装置4内の測位アプリ11からの要求に基づいて、所望のブロックにおける上空の見通し度合い値を算出する(ステップS201)。
【0067】
そして、地図配信サーバ2の配信部54が、地図情報DB52から検索した所望のブロックの地図情報と見通し度合い算出部53が算出したこのブロックにおける上空の見通し度合い値をネットワーク3を介して、位置情報取得装置4内の測位アプリ11に配信する(ステップS202)。
【0068】
所望のブロックの地図情報とこれに対応する上空の見通し度合い値を受信した位置情報取得装置4は、配信された情報に基づいて、測位方法を適宜選択する(ステップS203)。そして、選択された測位方法に基づいて、位置情報を取得する。
【0069】
したがって、本実施形態によれば、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【0070】
なお、位置情報取得装置および位置情報取得システムの処理をコンピュータ読み取り可能な記録媒体に記録し、この記録媒体に記録されたプログラムを位置情報取得装置あるいは位置情報取得システムを形成する位置情報取得装置および地図配信サーバに読み込ませ、実行することによって本発明の無効化処理システムを実現することができる。ここでいうコンピュータシステムとは、OSや周辺装置等のハードウェアを含む。
【0071】
また、「コンピュータシステム」は、WWW(World Wide Web)システムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されても良い。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。
【0072】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。更に、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組合せで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0073】
以上、この発明の実施形態につき、図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0074】
1、4・・・位置情報取得装置
2・・・地図配信サーバ
3・・・ネットワーク
10、40・・・見通し度合い推測部
11・・・測位アプリ
12、16・・・測位制御部
13、17・・・地図データDB
14、18・・・上空見通し値DB
15・・・測位方法DB
20、50・・・測位方法選択部
21・・・切り替えスイッチ
30・・・位置情報取得部
31・・・自律測位系
32・・・センサ連携GPS測位系
33・・・GPS測位系
51・・・地物・建造物DB
52・・・地図情報DB
53・・・見通し度合い算出部
54・・・配信部
【技術分野】
【0001】
本発明は、現在位置あるいは進行方向周辺地物や建造物に基づく、上空の見通しの度合いに応じて、測位手法を最適な測位方法に適宜切り替える位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラムに関する。
【背景技術】
【0002】
近年、乗用車などの車両に対してナビゲーション装置が普及している。かかるナビゲーション装置は、車両の運転室に設置され、GPS(Grobal Positionig System)などを利用してこの車両の位置(自車位置)や走行方向を表わす情報(以下、GPS情報という)を取得し、表示画面上に地図とその地図上で車両を目的地までの経路とを表示するとともに、この経路上に自車位置を示すカーマークを表示するものである(例えば、特許文献1参照)。
【0003】
また、このGPS測位系に加えて、角速度センサに基づく自律測位系を備えたハイブリッド構成のナビゲーション装置も普及している。こうしたハイブリッド構成のナビゲーション装置では、GPS測位、あるいは上空見通しの悪い環境においてはセンサ情報との連携測位、またはセンサ情報のみの自律航法により自装置の位置を計算する。これにより、GPS単独での測位に比べ、測位精度の向上が図れる(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−304090号公報
【特許文献2】特開2003−247833号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の装置では、センサ情報とGPS測位系とを連携させることにより連携部分の演算処理やGPS信号が補足できない領域でのセンサ情報による自律航法の演算処理が追加で発生する。そのため、パーソナルコンピュータと比較して計算処理能力が低くバッテリー駆動である携帯機器などの装置においては、このような処理負荷、および処理に伴うバッテリー消費の低減が課題となる。
【0006】
そこで、本発明は、上述の課題に鑑みてなされたものであり、測位精度を維持しつつ、バッテリー消費を低減できる位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上記の課題を解決するために、以下の事項を提案している。
【0008】
(1)本発明は、進行方向の上空の見通しの度合いを推測する見通し度合い推測手段と、該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、を備えたことを特徴とする位置情報取得装置を提案している。
【0009】
この発明によれば、見通し度合い推測手段は、進行方向の上空の見通しの度合いを推測する。測位方法選択手段は、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、位置情報取得手段は、その選択された測位方法に基づいて、位置情報を取得する。したがって、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0010】
(2)本発明は、(1)の位置情報取得装置について、前記見通し度合い推測手段が、地図を所定のブロックに分割し、該分割したブロックごとに、それぞれのブロック内に存在する地物、建造物から各ブロックの上空の見通し度合いを推測することを特徴とする位置情報取得装置を提案している。
【0011】
この発明によれば、見通し度合い推測手段は、地図を所定のブロックに分割し、その分割したブロックごとに、それぞれのブロック内に存在する地物、建造物から各ブロックの上空の見通し度合いを推測する。したがって、各ブロックに存在する地物や建造物の大きさや高さ等の情報から上空の見通し度合いを推測するため、確度の高い推定が期待できる。
【0012】
(3)本発明は、(2)の位置情報取得装置について、前記見通し度合い推測手段が、前記各ブロックの上空の見通し度合いを数値化し、測位方法に対応づけたデータベースを構築することを特徴とする位置情報取得装置を提案している。
【0013】
この発明によれば、見通し度合い推測手段は、各ブロックの上空の見通し度合いを数値化し、測位方法に対応づけたデータベースを構築する。したがって、このデータベースを用いることにより、即座に現在あるいは進行方向のブロックにおける適切な測位方法を抽出することができる。
【0014】
(4)本発明は、(3)の位置情報取得装置について、前記見通し度合い推測手段が、前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により上空の見通し度合いを数値化して、データベースを構築することを特徴とする位置情報取得装置を提案している。
【0015】
この発明によれば、見通し度合い推測手段は、各ブロックの面積に対する地物、建造物が占有する面積の比率により上空の見通し度合いを数値化して、データベースを構築する。したがって、上記の比率を2値化する、あるいは、予め設定した閾値に対する離散の度合いから上空の見通し度合いを数値化することにより、簡易な演算処理で正確なデータベースを構築することができる。
【0016】
(5)本発明は、(1)の位置情報取得装置について、前記測位方法選択手段が、少なくともGPS単独測位、センサ情報とGPSとの連携測位、センサ情報のみの自律測位の中から前記見通しの度合いに応じた測位方法を適宜選択することを特徴とする位置情報取得装置を提案している。
【0017】
この発明によれば、測位方法選択手段は、少なくともGPS単独測位、センサ情報とGPSとの連携測位、センサ情報のみの自律測位の中から見通しの度合いに応じた測位方法を適宜選択する。したがって、特殊な測位方法を用いることなく、既存の測位方法を組み合わせることによって、状況に応じた正確な位置情報を取得することができる。
【0018】
(6)本発明は、(5)の位置情報取得装置について、前記センサ情報を提供するセンサが少なくとも加速度センサ、ジャイロを含むことを特徴とする位置情報取得装置を提案している。
【0019】
この発明によれば、センサ情報を提供するセンサが少なくとも加速度センサ、ジャイロを含む。したがって、加速度センサにより移動距離を推定し、ジャイロにより回転角を推定することができる。
【0020】
(7)本発明は、(6)の位置情報取得装置について、前記センサの駆動を制御する駆動制御手段と、進行方向を検出する進行方向検出手段と、を備え、前記進行方向検出手段が、前記見通し度合い推測手段によって、進行方向が上空の見通し度合いが悪いブロックに向かっていることを検出したときに、前記駆動制御手段が、前記上空の見通し度合いが悪いブロックに進入する前から前記センサを駆動することを特徴とする位置情報取得装置を提案している。
【0021】
この発明によれば、駆動制御手段は、センサの駆動を制御する。進行方向検出手段は、進行方向を検出する。そして、進行方向検出手段が、見通し度合い推測手段によって、進行方向が上空の見通し度合いが悪いブロックに向かっていることを検出したときに、駆動制御手段が、上空の見通し度合いが悪いブロックに進入する前からセンサを駆動する。したがって、駆動制御手段が、上空の見通し度合いが悪いブロックに進入する前からセンサを駆動するため、上空の見通し度合いが悪いブロックにおいても位置情報の取得精度を向上させることができる。
【0022】
(8)本発明は、地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムであって、前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する配信手段を備え、前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、を備えたことを特徴とする位置情報取得システムを提案している。
【0023】
この発明によれば、地図情報配信サーバの配信手段は、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとを配信する。一方、位置情報取得装置の測位方法選択手段は、地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択し、位置情報取得手段は、その選択された測位方法に基づいて、位置情報を取得する。したがって、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【0024】
(9)本発明は、進行方向の上空の見通しの度合いを推測する第1のステップと、該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、を備えたことを特徴とする位置情報取得方法を提案している。
【0025】
この発明によれば、進行方向の上空の見通しの度合いを推測し、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、その選択された測位方法に基づいて、位置情報を取得する。したがって、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0026】
(10)本発明は、地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法であって、前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、を備えたことを特徴とする位置情報取得方法を提案している。
【0027】
この発明によれば、地図情報配信サーバは、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとを配信する。一方、位置情報取得装置は、地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択し、その選択された測位方法に基づいて、位置情報を取得する。したがって、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【0028】
(11)コンピュータに、進行方向の上空の見通しの度合いを推測する第1のステップと、該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、を実行させるためのプログラムを提案している。
【0029】
この発明によれば、進行方向の上空の見通しの度合いを推測し、その見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。そして、その選択された測位方法に基づいて、位置情報を取得する。したがって、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0030】
(12)本発明は、地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法をコンピュータに実行させるためのプログラムであって、前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、該選択された測位方法に基づいて、位置情報を取得する第3のステップと、をコンピュータに実行させるためのプログラムを提案している。
【0031】
この発明によれば、地図情報配信サーバは、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとを配信する。一方、位置情報取得装置は、地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択し、その選択された測位方法に基づいて、位置情報を取得する。したがって、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【発明の効果】
【0032】
本発明によれば、センサ情報を用いた測位に伴う演算処理量の増分を現在位置あるいは進行方向の周辺地物、建造物の情報に応じて低減することができるため、携帯機器に測位機能を搭載した場合であってもバッテリセーブの効果が期待できる。
【図面の簡単な説明】
【0033】
【図1】第1の実施形態に係る位置情報取得装置の概略構成を示す図である。
【図2】第1の実施形態に係る位置情報取得装置の詳細な構成を示す図である。
【図3】第1の実施形態に係る地図データと分割された区画ごとの上空の見通し値との関係を示した図である。
【図4】第1の実施形態に係る上空の見通し値と測位方法との対応関係を示した図である。
【図5】第1の実施形態に係る位置情報取得装置の処理フローである。
【図6】第2の実施形態に係る位置情報取得システムのシステム構成を示す図である。
【図7】第2の実施形態に係る地図配信サーバの構成図である。
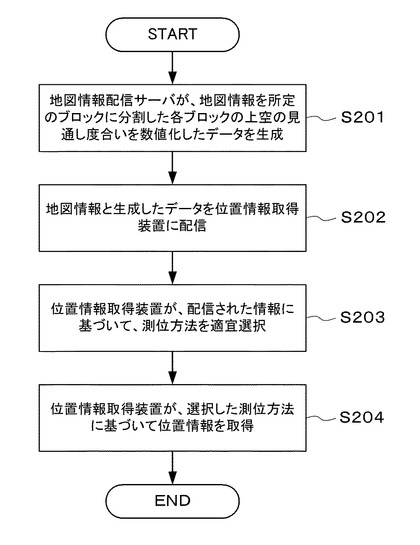
【図8】第2の実施形態に係る位置情報取得システムの処理フローである。
【発明を実施するための形態】
【0034】
以下、図面を用いて、本発明の実施形態について詳細に説明する。
なお、本実施形態における構成要素は適宜、既存の構成要素等との置き換えが可能であり、また、他の既存の構成要素との組み合わせを含む様々なバリエーションが可能である。したがって、本実施形態の記載をもって、特許請求の範囲に記載された発明の内容を限定するものではない。
【0035】
<第1の実施形態>
図1から図5を参照して、本発明の第1の実施形態について説明する。なお、以下では、本発明の位置情報取得装置が、携帯端末に搭載される場合を例にとって説明する。また、その前提条件として、位置情報取得装置には、GPS受信機やセンサ(加速度センサ、ジャイロ等)が実装されており、ナビゲーション用のアプリケーションがインストールされ、ナビゲーション時の地図情報は、装置内の地図データDB(データベース)および上空の見通しDBより随時取得するものとする。
【0036】
<位置情報取得装置の構成>
本実施形態に係る位置情報取得装置は、図1に示すように、大きく、見通し度合い推測部10と、測位方法選択部20と、位置情報取得部30とから構成されている。
【0037】
ここで、見通し度合い推測部10は、進行方向の上空の見通しの度合いを推測する。測位方法選択部20は、見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する。また、位置情報取得部30は、選択された測位方法に基づいて、位置情報を取得する。
【0038】
上記、各構成要素の詳細な内部構成を図2に示す。図2に示すように、見通し度合い推測部10は、測位アプリ11と、測位制御部12と、地図データDB13と、上空の見通し値DB14と、測位方法DB15とから構成されている。
【0039】
ここで、測位アプリ11は、ナビゲーション用のアプリケーションである。測位制御部12は、位置情報取得装置1全体の動作を制御するための制御プログラムに従って、制御を行う。具体的には、見通し度合い推測に関する一連の処理や測位方法の選択を実行する。
【0040】
地図データDB13は、ナビゲーション用の地図データを格納する記憶装置である。本実施形態では、予めナビゲーション用の地図データが格納されている。なお、格納する地図データは、携帯端末の記憶容量を考慮して、すべての地図データを格納するのではなく、予め地図情報配信サーバから必要なエリアの地図データのみをダウンロードしてもよい。上空の見通し値DB14は、図3に示すように、地図データの所定のサイズに分割したブロックごとの上空の見通し値がブロックに対応付けられて格納されている。なお、図3は、上空見通し値が0から9の10段階評価の場合を例示している。
【0041】
具体的には、位置情報取得装置1には、予め、各ブロックごとの地物や建造物の情報(高さ、幅、奥行き、属性等)に関する情報が設定されており、前述した測位制御部12が、設定されている各ブロックごとの地物や建造物の情報に基づいて、例えば、各ブロックに対して、予め設定された閾値を超過する高さの地物や建造物が占有する面積が単位面積当たりに占める割合を予め設定された面積率と比較することにより、上空の見通し良し悪しを2値のデータ、あるいは、面積率からの離散の度合いに応じた数値として算出し、上空の見通し値DB14内に格納する。
【0042】
測位方法DB15は、図4に示すような上空見通し値と測位方法とを関連付けて格納する記憶装置である。
【0043】
つまり、測位制御部12は、後述する測位方法により測位された現在位置と地図データDB13に格納された地図データとを比較することにより、現在存在するブロックを検出し、さらに、検出したブロックに基づいて、上空の見通し値DB14から上空の見通し値を検索し、検索した上空の見通し値に基づいて、測位方法DB15から最適な測位方法を選択する。
【0044】
測位方法選択部20は、図2に示すように、測位制御部12と、切り替えスイッチ21とから構成されている。
【0045】
測位制御部12は、測位方法DB15から最適な測位方法を選択し、切り替えスイッチ21を駆動して、測位方法を切り替える。なお、測位制御部12は、携帯端末の移動速度に応じて測位手法判定の間隔を調整する。ここで、移動速度の推定は、例えば、前回測位位置と現在位置との差分および測位間隔(時間)を元に算出することができる。
【0046】
位置情報取得部30は、図2に示すように、自律測位系31と、センサ連携GPS測位系32と、GPS測位系33とから構成されている。
【0047】
自律測位系31とは、加速度センサやジャイロ等のセンサを用いて、進行方向と距離を推定する測位方法であり、トンネルの中や高層ビルの谷間など、GPS測位が機能しない場所で用いられる。
【0048】
センサ連携GPS測位系32とは、GPS受信機による測位と加速度センサやジャイロ等のセンサによる測位を連携させたものであり、GPS受信機による測位間隔をセンサによる測位で補うものである。
【0049】
GPS測位系33とは、アメリカ合衆国が軍事用に打ち上げた約30個のGPS衛星のうち、上空にある数個の衛星からの信号をGPS受信機で受け取り、現在位置を知るシステムである。GPS衛星からの信号には、衛星に搭載された原子時計からの時刻のデータ、衛星の軌道情報などが含まれている。GPS受信機にも正確な時刻を知ることができる時計が搭載されているならば、GPS衛星からの電波を受信し、発信-受信の時刻差に電波の伝播速度(光の速度と同じ30万km/秒)を掛けることによって、その衛星からの距離がわかる。3個のGPS衛星からの距離がわかれば、空間上の一点は決定できる。
【0050】
<位置情報取得装置の処理>
図5を用いて、位置情報取得装置の処理について説明する。
まず、見通し度合い推測部10は、進行方向の上空の見通しの度合いを推測する(ステップS101)。具体的には、位置情報取得装置1には、予め、各ブロックごとの地物や建造物の情報(高さ、幅、奥行き、属性等)に関する情報が設定されており、前述した測位制御部12が、設定されている各ブロックごとの地物や建造物の情報に基づいて、例えば、各ブロックに対して、予め設定された閾値を超過する高さの地物や建造物が占有する面積が単位面積当たりに占める割合を予め設定された面積率と比較することにより、上空の見通し良し悪しを2値のデータ、あるいは、面積率からの離散の度合いに応じた数値として算出し、上空の見通し値DB14内に格納する。
【0051】
測位方法選択部20は、見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する(ステップS102)。具体的には、測位制御部12は、後述する測位方法により測位された現在位置と地図データDB13に格納された地図データとを比較することにより、現在存在するブロックを検出し、さらに、検出したブロックに基づいて、上空の見通し値DB14から上空の見通し値を検索し、検索した上空の見通し値に基づいて、測位方法DB15から最適な測位方法を選択する。
【0052】
そして、位置情報取得部30は、選択された測位方法に基づいて、位置情報を取得する(ステップS103)。
【0053】
したがって、本実施形態によれば、複数の測位方法を同時に駆動することなく、進行方向の上空の見通しの度合いを推定して、適切な測位方法を1つ選択して、位置情報を取得することから、携帯機器などのように、バッテリー容量が小さい電子機器に位置情報取得機能を搭載した場合であっても、余分なバッテリーの消費を抑制することができる。
【0054】
<第2の実施形態>
図6から図8を用いて、本発明の第2の実施形態について説明する。なお、以下では、本発明の位置情報取得装置が、携帯端末に搭載される場合を例にとって説明する。また、その前提条件として、位置情報取得装置には、GPS受信機やセンサ(加速度センサ、ジャイロ等)が実装されており、ナビゲーション用のアプリケーションがインストールされ、ナビゲーション時の地図情報は、ネットワーク側の地図データ配信サーバより随時ダウンロードして得られるものとする。
【0055】
<位置情報取得システムの構成>
本実施形態に係る位置情報取得システムは、図6に示すように、地図配信サーバ2と、位置情報取得装置4とから構成され、これらはネットワーク3を介して接続されている。
【0056】
<位置情報取得装置の構成>
位置情報取得装置4は、図6に示すように、大きく、見通し度合い推測部40と、測位方法選択部50と、位置情報取得部30とから構成されている。なお、それぞれの機能は、第1の実施形態とほぼ同様であるため、ここでは、相違点のみを説明する。
【0057】
図6に示すように、見通し度合い推測部40は、測位アプリ11と、測位制御部16と、地図データDB17と、上空の見通し値DB18と、測位方法DB15とから構成されている。
【0058】
ここで、測位制御部16は、位置情報取得装置4全体の動作を制御するための制御プログラムに従って、制御を行う。具体的には、地図配信サーバ2から配信される情報に基づいて、見通し度合い推測に関する一連の処理や測位方法の選択を実行する。
【0059】
地図データDB17は、ナビゲーション用の地図データを格納する記憶装置である。本実施形態では、地図配信サーバ2から配信される地図データが格納されている。なお、地図配信サーバ2からの地図データの配信は、測位アプリ11からの要求に応じて、ネットワーク3および無線通信部60を介して実行される。上空の見通し値DB18は、地図配信サーバ2から地図データが配信される際に、同時に配信される図3に示すような地図データの所定のサイズに分割したブロックごとの上空の見通し値をブロックに対応付けて格納する。
【0060】
測位方法選択部50は、図6に示すように、測位制御部16と、切り替えスイッチ21とから構成されている。
【0061】
測位制御部16は、上空の見通し値DB18の情報に基づいて、測位方法DB15から最適な測位方法を選択し、切り替えスイッチ21を駆動して、測位方法を切り替える。なお、測位制御部16は、携帯端末の移動速度に応じて測位手法判定の間隔を調整する。ここで、移動速度の推定は、例えば、前回測位位置と現在位置との差分および測位間隔(時間)を元に算出することができる。
【0062】
<地図配信サーバの構成>
図7に示すように、地図配信サーバは、地物・建造物DB51と、地図情報DB52と、見通し度合い算出部53と、配信部54とから構成されている。
【0063】
地物・建造物DB51は、地図情報を所定の単位に分割した各ブロック内の地物や建造物の情報を格納する記憶装置である。地図情報DB52は、地図情報を所定の単位に分割した各ブロックの地図データを格納する記憶装置である。
【0064】
見通し度合い算出部53は、地物・建造物DB51の情報に基づいて、各ブロックにおける上空の見通し度合いを算出する。具体的には、地物・建造物DB51に予め、設定されている各ブロックごとの地物や建造物の情報(高さ、幅、奥行き、属性等)に関する情報に基づいて、例えば、各ブロックに対して、予め設定された閾値を超過する高さの地物や建造物が占有する面積が単位面積当たりに占める割合を予め設定された面積率と比較することにより、上空の見通し良し悪しを2値のデータ、あるいは、面積率からの離散の度合いに応じた数値として算出する。
【0065】
配信部54は、位置情報取得装置4内の測位アプリ11からの要求に基づいて、地図情報DB52から検索した所望のブロックの地図情報と見通し度合い算出部53が算出したこのブロックにおける上空の見通し度合い値をネットワーク3を介して、位置情報取得装置4内の測位アプリ11に配信する。
【0066】
<位置情報取得システムの処理>
図8を用いて、位置情報取得システムの処理について説明する。
まず、地図配信サーバ2の見通し度合い算出部53が、位置情報取得装置4内の測位アプリ11からの要求に基づいて、所望のブロックにおける上空の見通し度合い値を算出する(ステップS201)。
【0067】
そして、地図配信サーバ2の配信部54が、地図情報DB52から検索した所望のブロックの地図情報と見通し度合い算出部53が算出したこのブロックにおける上空の見通し度合い値をネットワーク3を介して、位置情報取得装置4内の測位アプリ11に配信する(ステップS202)。
【0068】
所望のブロックの地図情報とこれに対応する上空の見通し度合い値を受信した位置情報取得装置4は、配信された情報に基づいて、測位方法を適宜選択する(ステップS203)。そして、選択された測位方法に基づいて、位置情報を取得する。
【0069】
したがって、本実施形態によれば、地図情報配信サーバから所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを各ブロックの面積に対する地物、建造物が占有する面積の比率により数値化したデータとが配信されるため、位置情報取得装置の処理負荷を軽減することができる。
【0070】
なお、位置情報取得装置および位置情報取得システムの処理をコンピュータ読み取り可能な記録媒体に記録し、この記録媒体に記録されたプログラムを位置情報取得装置あるいは位置情報取得システムを形成する位置情報取得装置および地図配信サーバに読み込ませ、実行することによって本発明の無効化処理システムを実現することができる。ここでいうコンピュータシステムとは、OSや周辺装置等のハードウェアを含む。
【0071】
また、「コンピュータシステム」は、WWW(World Wide Web)システムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されても良い。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。
【0072】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。更に、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組合せで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0073】
以上、この発明の実施形態につき、図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0074】
1、4・・・位置情報取得装置
2・・・地図配信サーバ
3・・・ネットワーク
10、40・・・見通し度合い推測部
11・・・測位アプリ
12、16・・・測位制御部
13、17・・・地図データDB
14、18・・・上空見通し値DB
15・・・測位方法DB
20、50・・・測位方法選択部
21・・・切り替えスイッチ
30・・・位置情報取得部
31・・・自律測位系
32・・・センサ連携GPS測位系
33・・・GPS測位系
51・・・地物・建造物DB
52・・・地図情報DB
53・・・見通し度合い算出部
54・・・配信部
【特許請求の範囲】
【請求項1】
進行方向の上空の見通しの度合いを推測する見通し度合い推測手段と、
該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、
該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、
を備えたことを特徴とする位置情報取得装置。
【請求項2】
前記見通し度合い推測手段が、地図を所定のブロックに分割し、該分割したブロックごとに、それぞれのブロック内に存在する地物、建造物から各ブロックの上空の見通し度合いを推測することを特徴とする請求項1に記載の位置情報取得装置。
【請求項3】
前記見通し度合い推測手段が、前記各ブロックの上空の見通し度合いを数値化して、データベースを構築することを特徴とする請求項2に記載の位置情報取得装置。
【請求項4】
前記見通し度合い推測手段が、前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により上空の見通し度合いを数値化し、測位方法に対応づけたデータベースを構築することを特徴とする請求項3に記載の位置情報取得装置。
【請求項5】
前記測位方法選択手段が、少なくともGPS単独測位、センサ情報とGPSとの連携測位、センサ情報のみの自律測位の中から前記見通しの度合いに応じた測位方法を適宜選択することを特徴とする請求項1に記載の位置情報取得装置。
【請求項6】
前記センサ情報を提供するセンサが少なくとも加速度センサ、ジャイロを含むことを特徴とする請求項5に記載の位置情報取得装置。
【請求項7】
前記センサの駆動を制御する駆動制御手段と、
進行方向を検出する進行方向検出手段と、
を備え、
前記進行方向検出手段が、前記見通し度合い推測手段によって、進行方向が上空の見通し度合いが悪いブロックに向かっていることを検出したときに、前記駆動制御手段が、前記上空の見通し度合いが悪いブロックに進入する前から前記センサを駆動することを特徴とする請求項6に記載の位置情報取得装置。
【請求項8】
地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムであって、
前記地図情報配信サーバが、
所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する配信手段を備え、
前記位置情報取得装置が、
前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、
該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、
を備えたことを特徴とする位置情報取得システム。
【請求項9】
進行方向の上空の見通しの度合いを推測する第1のステップと、
該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
を備えたことを特徴とする位置情報取得方法。
【請求項10】
地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法であって、
前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、
前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
を備えたことを特徴とする位置情報取得方法。
【請求項11】
コンピュータに、
進行方向の上空の見通しの度合いを推測する第1のステップと、
該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
を実行させるためのプログラム。
【請求項12】
地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法をコンピュータに実行させるためのプログラムであって、
前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、
前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
をコンピュータに実行させるためのプログラム。
【請求項1】
進行方向の上空の見通しの度合いを推測する見通し度合い推測手段と、
該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、
該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、
を備えたことを特徴とする位置情報取得装置。
【請求項2】
前記見通し度合い推測手段が、地図を所定のブロックに分割し、該分割したブロックごとに、それぞれのブロック内に存在する地物、建造物から各ブロックの上空の見通し度合いを推測することを特徴とする請求項1に記載の位置情報取得装置。
【請求項3】
前記見通し度合い推測手段が、前記各ブロックの上空の見通し度合いを数値化して、データベースを構築することを特徴とする請求項2に記載の位置情報取得装置。
【請求項4】
前記見通し度合い推測手段が、前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により上空の見通し度合いを数値化し、測位方法に対応づけたデータベースを構築することを特徴とする請求項3に記載の位置情報取得装置。
【請求項5】
前記測位方法選択手段が、少なくともGPS単独測位、センサ情報とGPSとの連携測位、センサ情報のみの自律測位の中から前記見通しの度合いに応じた測位方法を適宜選択することを特徴とする請求項1に記載の位置情報取得装置。
【請求項6】
前記センサ情報を提供するセンサが少なくとも加速度センサ、ジャイロを含むことを特徴とする請求項5に記載の位置情報取得装置。
【請求項7】
前記センサの駆動を制御する駆動制御手段と、
進行方向を検出する進行方向検出手段と、
を備え、
前記進行方向検出手段が、前記見通し度合い推測手段によって、進行方向が上空の見通し度合いが悪いブロックに向かっていることを検出したときに、前記駆動制御手段が、前記上空の見通し度合いが悪いブロックに進入する前から前記センサを駆動することを特徴とする請求項6に記載の位置情報取得装置。
【請求項8】
地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムであって、
前記地図情報配信サーバが、
所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する配信手段を備え、
前記位置情報取得装置が、
前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する測位方法選択手段と、
該選択された測位方法に基づいて、位置情報を取得する位置情報取得手段と、
を備えたことを特徴とする位置情報取得システム。
【請求項9】
進行方向の上空の見通しの度合いを推測する第1のステップと、
該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
を備えたことを特徴とする位置情報取得方法。
【請求項10】
地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法であって、
前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、
前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
を備えたことを特徴とする位置情報取得方法。
【請求項11】
コンピュータに、
進行方向の上空の見通しの度合いを推測する第1のステップと、
該見通しの度合いに応じて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
を実行させるためのプログラム。
【請求項12】
地図情報を配信する地図情報配信サーバと、配信された該地図情報に基づいて、測位方法を選択して、位置情報を取得する位置情報取得装置とからなる位置情報取得システムにおける位置情報取得方法をコンピュータに実行させるためのプログラムであって、
前記地図情報配信サーバが、所定のブロックに分割した地図情報とそれぞれのブロックにおける上空の見通し度合いを前記各ブロックの面積に対する前記地物、建造物が占有する面積の比率により数値化したデータとを配信する第1のステップと、
前記位置情報取得装置が、前記地図情報配信サーバから配信される情報に基づいて、位置情報を取得する測位方法を適宜選択する第2のステップと、
該選択された測位方法に基づいて、位置情報を取得する第3のステップと、
をコンピュータに実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−230502(P2010−230502A)
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願番号】特願2009−78667(P2009−78667)
【出願日】平成21年3月27日(2009.3.27)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願日】平成21年3月27日(2009.3.27)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]