
位置情報取得装置、位置情報取得方法、及びプログラム
【課題】動作持続時間を維持しつつ、精度の高い位置情報を取得する位置情報取得装置等を提供する。
【解決手段】位置情報取得装置100は、所定の時間間隔で現在時刻と現在時刻における現在位置情報とを取得する移動履歴取得部181と、所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部182と、処理実行時刻より前の時刻に取得された第1の現在位置情報と、処理実行時刻より後の時刻に取得された第2の現在位置情報と、第1の現在位置情報に対応する第1の現在時刻と、第2の現在位置情報に対応する第2の現在時刻と、処理実行時刻と、に基づいて、処理実行時刻における処理実行位置を算出する処理実行位置算出部185と、処理実行位置と処理実行時刻とを関連付けて記憶する動作履歴取得部184と、を備える。
【解決手段】位置情報取得装置100は、所定の時間間隔で現在時刻と現在時刻における現在位置情報とを取得する移動履歴取得部181と、所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部182と、処理実行時刻より前の時刻に取得された第1の現在位置情報と、処理実行時刻より後の時刻に取得された第2の現在位置情報と、第1の現在位置情報に対応する第1の現在時刻と、第2の現在位置情報に対応する第2の現在時刻と、処理実行時刻と、に基づいて、処理実行時刻における処理実行位置を算出する処理実行位置算出部185と、処理実行位置と処理実行時刻とを関連付けて記憶する動作履歴取得部184と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報取得装置、位置情報取得方法、及びプログラムに関する。
【背景技術】
【0002】
GPS(Global Positioning System)機能を備えた携帯端末が増えている。GPS機能を使って精度の高い位置情報を取得するには、GPSの計測間隔を小さくする必要がある。しかしながら、携帯端末はバッテリ環境下で動作するため、GPSの計測間隔を小さくすると、電力消費が増え、携帯端末の動作持続時間が短くなるという問題がある。この問題を解決するため、特許文献1には、位置情報の精度が要求されない場面ではGPSの計測間隔を大きくし、位置情報の精度が必要とされる場面ではGPSの計測間隔を小さくする技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−249565号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術の場合、GPSの計測間隔が大きい状況下で、突如、位置情報が必要となった場合(例えば、カメラ機能を動作させたときの「時間」と「位置」を動作履歴として保存することが必要となった場合)、精度の高い位置情報を取得できないという問題がある。また、精度の高い位置情報が必要とされる場面が多い使用環境では、依然として携帯端末の動作持続時間が短いという問題がある。
【0005】
本発明は、このような問題に鑑みてなされたものであり、動作持続時間を維持しつつ、精度の高い位置情報を取得する位置情報取得装置、位置情報取得方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の観点に係る位置情報取得装置は、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得部と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出部と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得部と、を備える、
ことを特徴とする。
【0007】
前記処理実行位置算出部は、
前記第1の現在時刻から前記第2の現在時刻までの時間と、前記第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ直線を内分することによって前記処理実行位置を算出してもよい。
【0008】
道路情報を記憶する道路情報記憶部、を備え、
前記処理実行位置算出部は、
前記道路情報記憶部に記憶された道路情報を基に、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を判別し、
前記第1の現在時刻から前記第2の現在時刻までの時間と、第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を内分することによって前記処理実行位置を算出してもよい。
【0009】
前記動作履歴取得部は、
前記処理実行時刻が前記第1の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第1の現在位置情報を前記処理実行位置として取得し、前記処理実行時刻が前記第2の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第2の現在位置情報を前記処理実行位置として取得し、そのいずれでもない場合、前記処理実行位置算出部によって算出された位置を前記処理実行位置として取得し、
取得した処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶してもよい。
【0010】
前記所定の処理は、処理開始から処理終了まで所定の時間幅を要する処理であって、
前記処理実行時刻取得部は、処理開始から処理終了までの複数の異なった処理実行時刻を取得し、
前記動作履歴取得部は、前記処理実行時刻取得部で取得された処理実行時刻それぞれについて前記処理実行位置を取得してもよい。
【0011】
本発明の第2の観点に係る位置情報取得方法は、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得ステップと、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得ステップと、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出ステップと、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得ステップと、を有する、
ことを特徴とする。
【0012】
本発明の第3の観点に係る位置情報取得プログラムは、
コンピュータに、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得機能と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得機能と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出機能と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得機能と、
を実行させる。
【発明の効果】
【0013】
動作持続時間を維持しつつ、精度の高い位置情報を取得する位置情報取得装置、位置情報取得方法、及びプログラムを提供できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る位置情報取得装置の概観図である。
【図2】本発明の実施形態に係る位置情報取得装置のブロック図である。
【図3】位置情報取得装置の受信部から出力される現在位置情報を説明するための図である。
【図4】位置情報取得装置の記憶部に格納されるデータを説明するための図である。
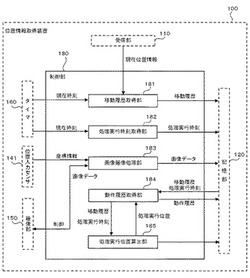
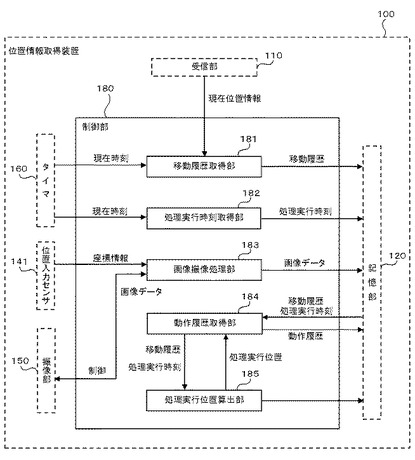
【図5】位置情報取得装置の制御部の機能を説明するための機能ブロック図である。
【図6】本発明の実施形態に係る移動履歴取得処理を説明するためのフローチャートである。
【図7】移動履歴が記憶部に記憶される様子を示す図である。
【図8】本発明の実施形態に係る画像撮像処理を説明するためのフローチャートである。
【図9】処理実行時刻が記憶部に記憶される様子を示す図である。
【図10】本発明の実施形態に係る動作履歴取得処理を説明するためのフローチャートである。
【図11】動作履歴取得処理を説明するための図であり、(A)は処理実行時刻が取得される直前に取得された現在位置情報を説明するための図であり、(B)は処理実行時刻が取得された直後に取得された現在位置情報を説明するための図である。
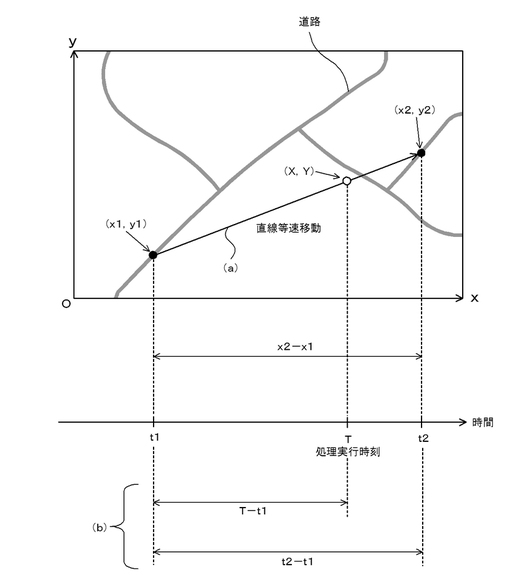
【図12】処理実行位置を算出する様子を説明するための図である。
【図13】動作履歴が記憶部に記憶される様子を示す図である。
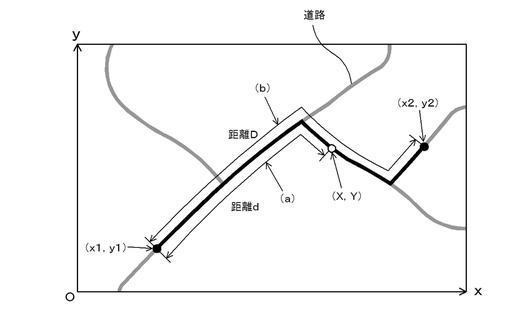
【図14】処理実行位置の算出方法の一例を説明するための図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について図面を参照しながら説明する。
【0016】
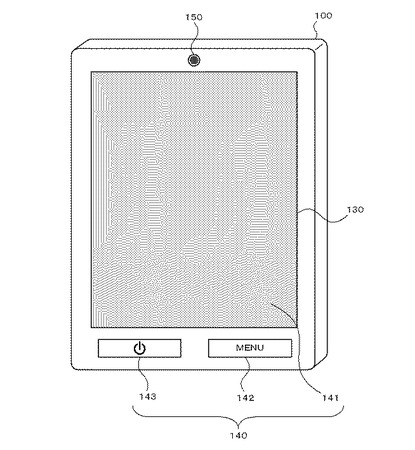
本発明の実施形態に係る位置情報取得装置100は、例えば、携帯電話やPDA(Personal Digital Assistant)等の携帯端末(例えば、図1に示すようなタッチパネル式の携帯端末)である。位置情報取得装置100は、撮像機能や録音機能等の各種機能を備えていて、これら機能を実行したときの「時間」と「位置」を動作履歴として保存する。なお、以下の説明では、理解を容易にするため、動作履歴の保存対象となる処理は「画像の撮像」として説明する。
【0017】
以下、位置情報取得装置100の構成について説明する。
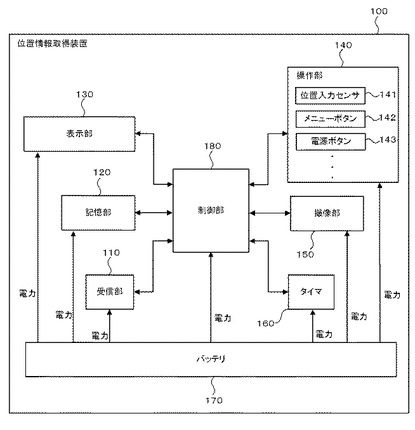
位置情報取得装置100は、図2に示すように、受信部110と、記憶部120と、表示部130と、操作部140と、撮像部150と、タイマ160と、バッテリ170と、制御部180とから構成される。
【0018】
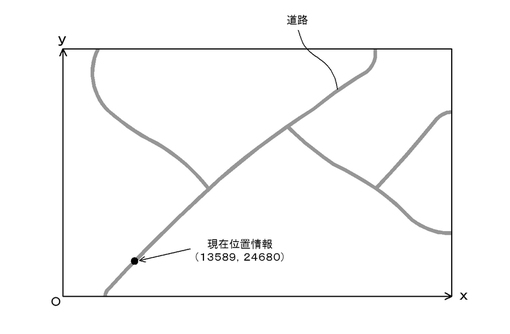
受信部110は、衛星測位システム(例えば、GPS(Global Positioning System)やガリレオ測位システム(Galileo Positioning System)等)の航法衛星からの電波を受信する受信機から構成される。受信部110は、航法衛星から電波を受信すると、受信した電波に含まれる情報を基に現在位置(例えば、東経139度44分28秒、北緯35度39分29秒という情報。以下、「現在位置情報」という。)を算出し、制御部180に送信する。なお、以下の説明では、理解を容易にするため、現在位置情報は、例えば図3に示すように、地図上のある位置を原点Oとした座標情報(x,y)として説明する。
【0019】
受信部110は、2つの動作モード(「省電力モード」と「通常モード」)を有している。「省電力モード」は航法衛星からの電波の受信を停止する等して最小限の電力消費で動作するモードである。また、「通常モード」は通常の電力消費で動作するモードであり、例えば、航法衛星から電波を受信して現在位置を算出する等の動作をするモードである。受信部110は制御部180から動作停止を命令する情報(以下、「動作停止命令」という。)を受信すると省電力モードに移行する。また、制御部180から動作開始を命令する情報(以下、「動作開始命令」という。)を受信すると通常モードに移行する。
【0020】
図2に戻り、記憶部120は、ハードディスクやフラッシュメモリ等の読み書き可能な不揮発性の記憶装置から構成される。記憶部120は「移動履歴」「処理実行時刻」「動作履歴」等の各種データを記録する。
【0021】
「移動履歴」は、現在時刻とその時刻における現在位置情報とを関連付けた情報である。移動履歴は、制御部180によって所定時間毎(例えば、5分毎)に取得され、例えば図4に示す(a)のように、逐次、記憶部120に蓄積される。
【0022】
「処理実行時刻」は、所定の処理(例えば、画像の撮像)を実行したときの時刻である。処理実行時刻は制御部180によって取得され、例えば図4に示す(b)のように、所定の処理を実行した時に一時的に記憶部120に保存される。
【0023】
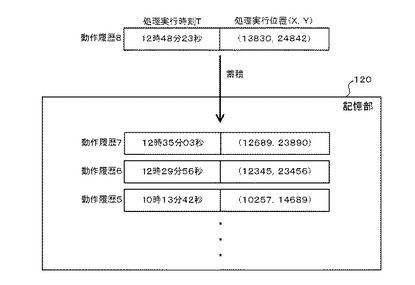
「動作履歴」は、処理実行時刻とその時刻における位置情報(以下、「処理実行位置」という。)を関連付けた情報である。動作履歴は制御部180によって取得され、例えば図4に示す(c)のように、随時、記憶部120に蓄積される。
【0024】
図2に戻り、表示部130は、LCD(Liquid Crystal Display:液晶ディスプレイ)やOELD(Organic EctroLuminescence Display:有機ELディスプレイ)等の表示装置から構成される。表示部130は制御部180の制御に従って画像や映像を表示する。
【0025】
操作部140は、位置入力センサ141、メニューボタン142、電源ボタン143等の各種ユーザインターフェースから構成される。
【0026】
位置入力センサ141は、タッチパネル等の位置入力装置から構成される。位置入力センサ141は透明のシート状、もしくは透明の板状をしており、表示部130の画像表示部分全体を覆うように設置されている。位置入力センサ141の表面には導電膜が形成されている。ユーザが位置入力センサ141の上から表示部130を押すと、位置入力センサ141は、導電膜の静電容量の変化を捉えてユーザの指の位置を検出し、検出した指の位置を座標情報として制御部180に送信する。
【0027】
メニューボタン142は、表示部130にメニュー画面等を表示させるためのボタンである。メニュー画面には各種機能(例えば、画像撮像機能、映像撮像機能、メール送信機能等)を起動するためのボタンが配置されていて、ユーザはこれらのボタンをタッチすることで、位置入力センサ141を介して各種機能を起動する。
【0028】
電源ボタン143は、位置情報取得装置100に電源を投入するためのボタンである。ユーザはこの電源ボタン143を押すことで位置情報取得装置100に電源を投入する。
【0029】
撮像部150は、CCD(Charge Coupled Device Image Sensor)カメラやCMOS(Complementary Metal Oxide Semiconductor)カメラ等の撮像装置から構成される。撮像部150は制御部180の制御に従って撮像を実行し、撮像した画像を制御部180に送信する。
【0030】
タイマ160は、クロック回路等の計時装置から構成される。タイマ160は現在時刻(例えば、現在の日付(年月日)、時間(時分秒)等)を計時して、制御部180に対し計時した現在時刻を送信する。
【0031】
また、タイマ160はタイマ機能も備えている。タイマ160は制御部180から時間がセットされると、セットされた時間のカウントダウンを開始する。そして、タイマ160はカウントダウンが終了したら制御部180に対して時間の経過を示す情報(以下、「時間経過通知」という。)を送信する。
【0032】
バッテリ170は、例えば、リチウムイオン電池等の二次電池から構成される。バッテリ170は位置情報取得装置100の各部に電力を供給する。
【0033】
制御部180は、プロセッサ等の処理装置から構成される。制御部180は不図示のROM(Read Only Memory)に格納されているプログラムに従って動作し、後述の「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」を含む種々の動作を実行する。
【0034】
制御部180は、「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」に従って動作することで、図5に示すように、移動履歴取得部181、処理実行時刻取得部182、画像撮像処理部183、動作履歴取得部184、処理実行位置算出部185として機能する(これら機能の動作については、「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」の説明の箇所で述べる)。
【0035】
制御部180は、マルチプロセス(マルチタスク)式のオペレーティングシステムに従って動作する。そのため、制御部180は「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」等の各種処理を並行して実行可能である。なお、以下の説明では、理解を容易にするため、「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」を実行するプロセスを、それぞれ「移動履歴取得プロセス」「画像撮像プロセス」「動作履歴取得プロセス」と呼ぶ。
【0036】
次に、このような構成を有する位置情報取得装置100の動作について説明する。
位置情報取得装置100の動作は、「移動履歴取得処理」と「画像撮像処理」と「動作履歴取得処理」とに分けられる。
移動履歴取得処理は、所定時間毎(例えば、5分毎)に、「現在時刻」とその現在時刻における「現在位置情報」とを取得し、それらの情報を関連付けた情報を「移動履歴」として取得するための処理である。
「画像撮像処理」は、撮像部150を制御して撮像を実行するとともに、撮像を実行したときの時刻を「処理実行時刻」として取得するための処理である。
「動作履歴取得処理」は、画像撮像処理で取得された「処理実行時刻」とその処理実行時刻における現在位置を「処理実行位置」として取得し、それらを関連付けた情報を「動作履歴」として取得するための処理である。
【0037】
最初に「移動履歴取得処理」について説明する。
【0038】
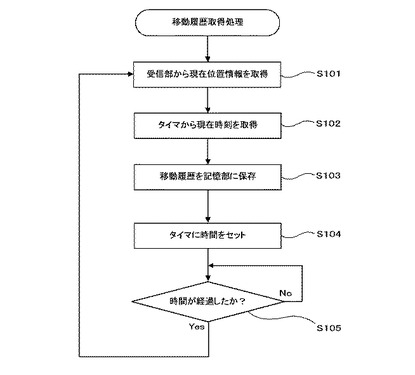
位置情報取得装置100に電源が投入されると、制御部180はオペレーティングシステムに対して「移動履歴取得プロセス」の生成を命令する。制御部180は移動履歴取得プロセスが生成されると、そのプロセス内で「移動履歴取得処理」を開始する。以下、図6のフローチャートを参照して「移動履歴取得処理」を説明する。
【0039】
移動履歴取得部181は、受信部110に対して動作開始命令を送信する。受信部110は移動履歴取得部181から動作開始命令が送信されると、通常モードに移行し、航法衛星からの電波の受信を開始する。受信部110は航法衛星から電波を受信すると、受信した電波に含まれる情報を基づいて現在位置情報(x,y)を算出する。そして、受信部110は算出した現在位置情報を移動履歴取得部181に対して送信する。移動履歴取得部181は受信部110から現在位置情報を受信すると、受信した情報を不図示のRAM(Random Access Memory)に保存する。保存が完了すると、移動履歴取得部181は、バッテリを節約するため、受信部110に対して動作停止命令を送信する。受信部110は移動履歴取得部181から動作停止命令を受信すると、省電力モードに移行して電力消費を抑制するとともに、移動履歴取得部181から動作開始命令が送信されるのを待機する(ステップS101)。
【0040】
次に、移動履歴取得部181は、タイマ160に対して現在時刻の送信を要求する。タイマ160は移動履歴取得部181から現在時刻の送信要求を受信すると、移動履歴取得部181に対して現在時刻tを送信する。移動履歴取得部181はタイマ160から現在時刻tを受信すると、受信した現在時刻tを不図示のRAMに保存する(ステップS102)。
【0041】
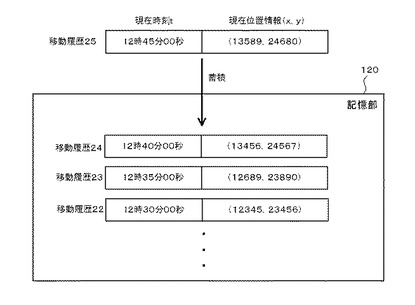
移動履歴取得部181は、ステップS101で取得した現在位置情報(x,y)と、ステップS102で取得した現在時刻tとを関連付け、例えば、図7に示すように、移動履歴として記憶部120に蓄積する(ステップS103)。
【0042】
図6に戻り、移動履歴の蓄積が完了すると、移動履歴取得部181は次の移動履歴を取得するまでの時間待機する。具体的には、次のステップ(ステップS104とステップS105)を実行して所定の時間(例えば5分)待機する。なお、「所定の時間」は5分毎に限定されない。「所定の時間」は、位置情報取得装置100が動作している間、移動履歴を取得することによる消費電力が、ユーザによる装置の使用に支障の少ない消費電力となるような間隔であることが好ましい。なお、「所定の時間」は、バッテリ170の残電力量が所定量以下の場合(例えば、残電力量が10パーセント以下の場合)に所定量以上の残電力量の時より長い間隔となるように変化させてもよい。
【0043】
まず、移動履歴取得部181は、タイマ160に対して所定の時間をセットする(ステップS104)。タイマ160は所定の時間がセットされると、セットされた時間のカウントダウンを開始する。タイマ160は、所定の時間が経過すると、移動履歴取得部181に対して時間経過通知を送信する。
【0044】
移動履歴取得部181は、タイマ160から時間経過通知を受信したか否か判別する(ステップS105)。時間経過通知を受信していない場合(ステップS105:No)、通知を受信するまでステップS105を繰り返す。時間経過通知を受信した場合(ステップS105:Yes)、ステップS101に戻り、再び移動履歴の取得を開始する。
【0045】
次に「画像撮像処理」について説明する。
【0046】
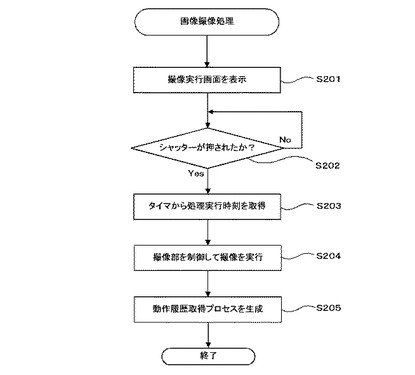
ユーザのメニュー画面操作等により画像撮像機能が選択されると、制御部180はオペレーティングシステムに対し「画像撮像プロセス」の生成を命令する。オペレーティングシステムによって画像撮像プロセスが生成されると、制御部180はそのプロセス内で「画像撮像処理」を開始する。以下、図8のフローチャートを参照して「画像撮像処理」を説明する。
【0047】
画像撮像処理部183は、表示部130に、シャッターボタンが表示された撮像実行画面を表示する(ステップS201)。
【0048】
画像撮像処理部183は、位置入力センサ141から送信される座標情報を基に、ユーザが画面中のシャッターボタンをタッチしたか否か判別する(ステップS202)。シャッターボタンがタッチされていない場合(ステップS202:No)、シャッターボタンがタッチされるまでステップS202を繰り返す。シャッターボタンがタッチされた場合(ステップS202:Yes)、ステップS203に進む。
【0049】
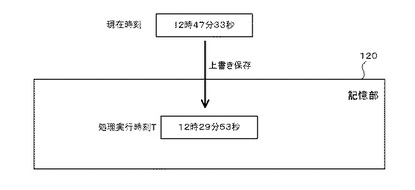
シャッターボタンがタッチされた場合、処理実行時刻取得部182はタイマ160に対して現在時刻の送信を要求する。タイマ160は処理実行時刻取得部182から要求を受信すると、処理実行時刻取得部182に対して現在時刻を送信する。処理実行時刻取得部182はタイマ160から現在時刻を受信すると、受信した現在時刻を、図9に示すように、処理実行時刻Tとして記憶部120に保存する(ステップS203)。
【0050】
図8に戻り、処理実行時刻Tの保存が完了したら、画像撮像処理部183は撮像部150を制御して撮像を実行する。撮像が完了したら、画像撮像処理部183は撮像部150が生成した画像データを記憶部120に保存する(ステップS204)。
【0051】
画像データの保存が完了したら、画像撮像処理部183は後述の「動作履歴取得処理」を実行するため、オペレーティングシステムに対し動作履歴取得プロセスの生成を命令する(ステップS205)。
【0052】
動作履歴取得プロセスが生成されたら、画像撮像処理部183は画像撮像処理を終了する。
【0053】
次に「動作履歴取得処理」について説明する。
【0054】
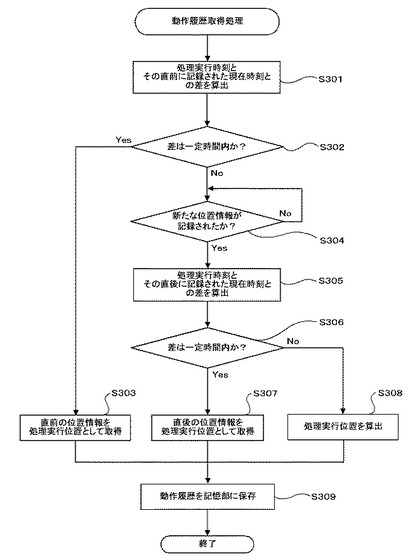
画像撮像処理によって動作履歴取得プロセスが生成されると、制御部180はそのプロセス内で「動作履歴取得処理」を開始する。以下、図10のフローチャートを参照して「動作履歴取得処理」を説明する。
【0055】
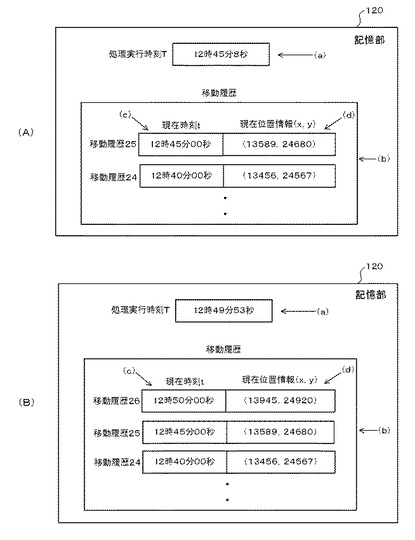
動作履歴取得部184は、記憶部120から処理実行時刻Tと処理実行時刻Tの直前に取得された現在位置情報(以下、「現在位置情報t1」という。)を取得する。例えば、記憶部120に、図11(A)に示す(a)のように処理実行時刻T(=12時45分8秒)が保存されおり、また、図11(A)に示す(b)のように移動履歴(移動履歴25、24、・・・・)が蓄積されているとすれば、図11(A)に示す(c)の12時45分00秒が現在位置情報t1である。動作履歴取得部184は、処理実行時刻Tと現在位置情報t1との差(T−t1)を算出し、不図示のRAMに保存する(ステップS301)。
【0056】
図10に戻り、動作履歴取得部184は、処理実行時刻Tと現在位置情報t1との差(T−t1)が所定時間c1以内か否か(例えば、10秒以内か否か)判別する(ステップS302)。
【0057】
差(T−t1)が所定時間c1以内の場合(ステップS302:Yes)、動作履歴取得部184は現在位置情報t1に関連付けられた現在位置情報(例えば、図11(A)に示す(d)の(13589,24680)。以下、「現在位置情報(x1,y1)」という。)を処理実行位置(以下、処理実行位置(X,Y)という。)として不図示のRAMに保存する(ステップS303)。
【0058】
図10のステップS302に戻り、差(T−t1)が所定時間c1より大きい場合(ステップS302:No)、動作履歴取得部184は前述の「移動履歴取得処理」によって記憶部120に新たな位置情報が保存されるまで待機する(ステップS304:No)。
【0059】
記憶部120に新たな位置情報が格納された場合(ステップS304:Yes)、動作履歴取得部184は、記憶部120から処理実行時刻Tと処理実行時刻Tの直後に取得された現在位置情報(以下、「現在位置情報t2」という。)を取得する。例えば、記憶部120に、図11(B)に示す(a)のように処理実行時刻T(=12時49分53秒)が保存されおり、また、図11(B)に示す(b)のように移動履歴(移動履歴26、25、24・・・・)が蓄積されているとすれば、図11(B)に示す(c)の12時50分00秒が現在位置情報t2である。動作履歴取得部184は、現在位置情報t2と処理実行時刻Tとの差(t2−T)を算出し、不図示のRAMに保存する(ステップS305)。
【0060】
図10に戻り、動作履歴取得部184は、処理実行時刻Tと現在位置情報t1との差(t2−T)が所定時間c2以内か否か(例えば、10秒以内か否か)判別する(ステップS306)。
【0061】
差(t2−T)が所定時間c2以内の場合(ステップS306:Yes)、動作履歴取得部184は現在位置情報t2に関連付けられた現在位置情報(例えば、図11(B)に示す(d)の(13945,24920)。以下、「現在位置情報(x2,y2)」という。)を処理実行位置(X,Y)として不図示のRAMに保存する(ステップS307)。
【0062】
図10のステップS306に戻り、差(t2−T)が所定時間c2より大きい場合(ステップS306:No)、処理実行位置算出部185は、ユーザが位置(x1,y1)と(x2,y2)の間を図12に示す(a)のように直線的に等速移動したものと仮定して処理実行位置(X,Y)を算出する(ステップS308)。
【0063】
例えば、処理実行位置算出部185は、図12に示す(b)のように、現在時刻t1からt2までの時間と現在時刻t1から処理実行時刻Tまでの時間との比に基づいて、現在位置情報(x1,y1)と(x2,y2)とを結ぶ直線を内分した位置を処理実行位置(X,Y)として算出する。具体的には、処理実行位置算出部185は下記(式1)〜(式3)により処理実行位置(X,Y)を算出する。
【0064】
α = (T−t1)/(t2―t1) ・・・・・・・・・(式1)
X = x1 + α×(x2−x1) ・・・・・・・・・(式2)
Y = y1 + α×(y2−y1) ・・・・・・・・・(式3)
【0065】
ここで、αは、現在時刻t1からt2までの時間と現在時刻t1から処理実行時刻Tまでの時間との比であり、X、Yはそれぞれ処理実行位置(X,Y)のX、Yの値である。
【0066】
なお、処理実行位置算出部185は、現在時刻t1からt2までの時間と、処理実行時刻Tからt2までの時間と、の比に基づいて、処理実行位置(X,Y)を算出することも可能である。具体的には、処理実行位置算出部185は下記(式4)〜(式6)により処理実行位置(X,Y)を算出する。
【0067】
α = (t2―T)/(t2―t1) ・・・・・・・・・(式4)
X = x2 − α×(x2−x1) ・・・・・・・・・(式5)
Y = y2 − α×(y2−y1) ・・・・・・・・・(式6)
【0068】
ここで、αは、現在時刻t1からt2までの時間と処理実行時刻Tからt2までの時間との比であり、X、Yはそれぞれ処理実行位置(X,Y)のX、Yの値である。
【0069】
処理実行位置算出部185は、算出した処理実行位置(X,Y)を不図示のRAMに保存する(ステップS308)。
【0070】
動作履歴取得部184は、RAMに保存されている処理実行位置(X,Y)を処理実行時刻Tと関連づけ、例えば、図13に示すように、動作履歴として記憶部120に保存する(ステップS309)。
【0071】
保存が終了したら、動作履歴取得部184は動作履歴取得処理を終了する。
【0072】
本実施形態によれば、位置情報取得装置100は、受信部110の計測間隔を変化させたりせず、長い計測間隔のまま一定間隔で動作させているので、いかなる状況で使用しても少ない電力消費で動作できる。その結果、長い動作持続時間を維持できる。
【0073】
また、位置情報取得装置100は、移動履歴をもとに位置情報を線形補間しているので、受信部110の動作間隔が長くても、高い精度の処理実行位置を取得することができる。
【0074】
また、処理実行時刻と受信部110が現在位置情報を取得した現在時刻が所定間隔以内である場合は受信部110が取得した現在位置情報を処理実行位置としているので、例えば短期間に進行方向や移動速度の変化が多数発生するような場合のように、線形補間が有効に働かない場合における誤差を緩和し、処理実行位置の精度をより高めることができる。
【0075】
また、位置情報取得装置100が有する機能は、画像の撮像機能や録音機能に限られない。位置情報取得装置100は、映像の撮像機能、電子メール機能、ブラウザ機能、ワープロ機能、表計算機能、電話機能、アプリケーションソフト実行機能等、さまざまな機能を有することが可能である。このとき、位置情報取得装置100は、これらの機能それぞれについて、処理実行位置(または動作履歴)を取得してもよい。
【0076】
なお、位置情報取得装置100は1つの処理で複数の処理実行位置(または動作履歴)を取得してもよい。例えば、動作履歴や処理実行位置を取得する対象となる処理が、処理開始から処理終了まで所定の時間幅(例えば、1秒以上の時間幅)を要する処理(例えば、映像の撮像機能、録音機能、電話機能等)の場合、処理開始から処理終了まで所定の時間間隔で複数の処理実行位置を取得してもよい。例えば、位置情報取得装置100は以下に示す動作で複数の処理実行位置(または動作履歴)を取得してもよい。
【0077】
まず、処理実行時刻取得部182は、処理が開始された時点でタイマ160から処理開始時刻を取得する。またと処理実行時刻取得部182は、処理が終了された時点でタイマ160から処理終了時刻を取得する。そして、処理実行時刻取得部182は、処理開始時刻と処理終了時刻を基に、所定の時間間隔(例えば10秒間隔)で複数の処理実行時刻を取得する(例えば、処理開始時刻が12時51分00秒で、処理終了時刻が12時51分30秒なのであれば、10秒間隔で、「12時51分00秒」「12時51分10秒」「12時51分20秒」「12時51分30秒」の4つの時刻を処理実行時刻として取得する)。そして処理実行位置算出部185は、取得した複数の処理実行時刻それぞれについて、例えばステップS308で説明した方法を使って処理実行位置を算出する。動作履歴取得部184は、処理実行位置算出部185が算出した複数の処理実行位置と、処理実行時刻取得部182が取得した複数の処理実行時刻とを取得する。そして、動作履歴取得部184は、取得した処理実行位置と処理実行時刻をそれぞれ関連付け、複数の動作履歴を取得する。
【0078】
また、ステップS308では、位置情報取得装置100が位置(x1,y1)と(x2,y2)の間を直線的に等速移動したものと仮定して処理実行位置(X,Y)を算出したが、位置情報取得装置100が地図で示される道路上を等速移動したものと仮定して処理実行位置(X,Y)を算出してもよい。
【0079】
例えば、位置情報取得装置100は例えばカーナビゲーション等に使用される地図情報を予め記憶部120に記憶している。地図情報には道路情報(例えば、所定間隔毎(例えば10m毎)に道路の位置情報が記録された情報)が格納されている。処理実行位置算出部185は、その道路情報に基づいて位置(x1,y1)と(x2,y2)とを結ぶ経路を判別する。判別方法は特定の手法に限られないが、例えば、ダイクストラ法(最短経路問題)等の公知の方法を使用することが可能である。
【0080】
そして、処理実行位置算出部185は、記憶部120に格納された道路情報を基に、図14に示す(a)のように、位置(x1,y1)と(x2,y2)とを結ぶ経路の距離Dを算出する。その後、処理実行位置算出部185は、図14に示す(b)のように、現在時刻t1からt2までの時間と現在時刻t1から処理実行時刻Tまでの時間との比に基づいて、位置(x1,y1)と(x2,y2)とを結ぶ経路を内分した位置を処理実行位置(X,Y)として算出する。具体的には、処理実行位置算出部185は以下のように処理実行位置(X,Y)を算出する。
【0081】
まず、処理実行位置算出部185は、下記(式7)〜(式8)により位置(x1,y1)から処理実行位置(X,Y)までの距離dを算出する。そして処理実行位置算出部185は、位置(x1,y1)から位置(x2,y2)に向かって、経路に沿って距離dほど進んだ位置を処理実行位置(X,Y)として算出する。
【0082】
α = (T−t1)/(t2―t1) ・・・・・・・・・(式7)
d = α × D ・・・・・・・・・(式8)
【0083】
なお、処理実行位置算出部185は、現在時刻t1からt2までの時間と処理実行時刻Tからt2までの時間との比に基づいて、処理実行位置(X,Y)を算出することも可能である。具体的には、処理実行位置算出部185は以下のように処理実行位置(X,Y)を算出する。
【0084】
まず、処理実行位置算出部185は下記(式9)〜(式10)により位置(x2,y2)から処理実行位置(X,Y)までの距離dを算出する。そして処理実行位置算出部185は位置(x2,y2)から位置(x1,y1)に向かって、経路に沿って距離dほど進んだ位置を処理実行位置(X,Y)として算出する。
【0085】
α = (t2―T)/(t2―t1) ・・・・・・・・・(式9)
d = α × D ・・・・・・・・・(式10)
【0086】
これにより、より誤差の少ない処理実行位置を算出することが可能になる。
【0087】
なお、位置情報取得装置100が位置(x1,y1)と(x2,y2)との間を直線等速移動したものとして処理実行位置(X,Y)を算出した場合であっても、地図情報を使ってさらに精度の高い処理実行位置を算出することが可能である。例えば、図12において算出された処理実行位置(X、Y)と地図情報とを照らし合わせて処理実行位置(X、Y)に最も近い道路上の座標を算出する。そして、算出された座標を処理実行位置として取得する。
【0088】
また、処理実行時刻取得部182は、タイマ160を使って処理実行時刻を取得したが、航法衛星からの電波に含まれる時間情報をそのまま処理実行時刻としてもよい。
【0089】
また、位置情報取得装置100は携帯電話やPDAに限られない。例えば、PND(Portable Navigation Device)やノートパソコン等の携帯端末であってもよい。また、位置情報取得装置100はユーザが携帯する携帯端末に限られず、例えば、カーナビゲーション装置やドライブレコーダのように、自動車や列車等の移動体に設置されて使用される装置であってもよい。
【0090】
本実施形態の位置情報取得装置100は、専用のシステムにより実現してもよいし、通常のコンピュータシステムにより実現してもよい。例えば、上述の動作を実行するためのプログラムをコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールして、上述の処理を実行することによって位置情報取得装置100を構成してもよい。また、インターネット等のネットワーク上のサーバ装置が備えるディスク装置に格納しておき、例えばコンピュータにダウンロード等できるようにしてもよい。また、上述の機能を、OSとアプリケーションソフトとの共同により実現してもよい。この場合には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等してもよい。
【0091】
上記プログラムを記録する記録媒体としては、USBメモリ、フレキシブルディスク、CD、DVD、Blu−ray Disc(登録商標)、MO、SDカード、メモリースティック(登録商標)、その他、磁気ディスク、光ディスク、光磁気ディスク、半導体メモリ、磁気テープ等のコンピュータ読取可能な記録媒体を使用することができる。
【0092】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。つまり、本発明の範囲は、実施形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【符号の説明】
【0093】
100 位置情報取得装置
110 受信部
120 記憶部
130 表示部
140 操作部
141 位置入力センサ
142 メニューボタン
143 電源ボタン
150 撮像部
160 タイマ
170 バッテリ
180 制御部
181 移動履歴取得部
182 処理実行時刻取得部
183 画像撮像処理部
184 動作履歴取得部
185 処理実行位置算出部
【技術分野】
【0001】
本発明は、位置情報取得装置、位置情報取得方法、及びプログラムに関する。
【背景技術】
【0002】
GPS(Global Positioning System)機能を備えた携帯端末が増えている。GPS機能を使って精度の高い位置情報を取得するには、GPSの計測間隔を小さくする必要がある。しかしながら、携帯端末はバッテリ環境下で動作するため、GPSの計測間隔を小さくすると、電力消費が増え、携帯端末の動作持続時間が短くなるという問題がある。この問題を解決するため、特許文献1には、位置情報の精度が要求されない場面ではGPSの計測間隔を大きくし、位置情報の精度が必要とされる場面ではGPSの計測間隔を小さくする技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−249565号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術の場合、GPSの計測間隔が大きい状況下で、突如、位置情報が必要となった場合(例えば、カメラ機能を動作させたときの「時間」と「位置」を動作履歴として保存することが必要となった場合)、精度の高い位置情報を取得できないという問題がある。また、精度の高い位置情報が必要とされる場面が多い使用環境では、依然として携帯端末の動作持続時間が短いという問題がある。
【0005】
本発明は、このような問題に鑑みてなされたものであり、動作持続時間を維持しつつ、精度の高い位置情報を取得する位置情報取得装置、位置情報取得方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の観点に係る位置情報取得装置は、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得部と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出部と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得部と、を備える、
ことを特徴とする。
【0007】
前記処理実行位置算出部は、
前記第1の現在時刻から前記第2の現在時刻までの時間と、前記第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ直線を内分することによって前記処理実行位置を算出してもよい。
【0008】
道路情報を記憶する道路情報記憶部、を備え、
前記処理実行位置算出部は、
前記道路情報記憶部に記憶された道路情報を基に、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を判別し、
前記第1の現在時刻から前記第2の現在時刻までの時間と、第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を内分することによって前記処理実行位置を算出してもよい。
【0009】
前記動作履歴取得部は、
前記処理実行時刻が前記第1の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第1の現在位置情報を前記処理実行位置として取得し、前記処理実行時刻が前記第2の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第2の現在位置情報を前記処理実行位置として取得し、そのいずれでもない場合、前記処理実行位置算出部によって算出された位置を前記処理実行位置として取得し、
取得した処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶してもよい。
【0010】
前記所定の処理は、処理開始から処理終了まで所定の時間幅を要する処理であって、
前記処理実行時刻取得部は、処理開始から処理終了までの複数の異なった処理実行時刻を取得し、
前記動作履歴取得部は、前記処理実行時刻取得部で取得された処理実行時刻それぞれについて前記処理実行位置を取得してもよい。
【0011】
本発明の第2の観点に係る位置情報取得方法は、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得ステップと、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得ステップと、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出ステップと、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得ステップと、を有する、
ことを特徴とする。
【0012】
本発明の第3の観点に係る位置情報取得プログラムは、
コンピュータに、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得機能と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得機能と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出機能と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得機能と、
を実行させる。
【発明の効果】
【0013】
動作持続時間を維持しつつ、精度の高い位置情報を取得する位置情報取得装置、位置情報取得方法、及びプログラムを提供できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る位置情報取得装置の概観図である。
【図2】本発明の実施形態に係る位置情報取得装置のブロック図である。
【図3】位置情報取得装置の受信部から出力される現在位置情報を説明するための図である。
【図4】位置情報取得装置の記憶部に格納されるデータを説明するための図である。
【図5】位置情報取得装置の制御部の機能を説明するための機能ブロック図である。
【図6】本発明の実施形態に係る移動履歴取得処理を説明するためのフローチャートである。
【図7】移動履歴が記憶部に記憶される様子を示す図である。
【図8】本発明の実施形態に係る画像撮像処理を説明するためのフローチャートである。
【図9】処理実行時刻が記憶部に記憶される様子を示す図である。
【図10】本発明の実施形態に係る動作履歴取得処理を説明するためのフローチャートである。
【図11】動作履歴取得処理を説明するための図であり、(A)は処理実行時刻が取得される直前に取得された現在位置情報を説明するための図であり、(B)は処理実行時刻が取得された直後に取得された現在位置情報を説明するための図である。
【図12】処理実行位置を算出する様子を説明するための図である。
【図13】動作履歴が記憶部に記憶される様子を示す図である。
【図14】処理実行位置の算出方法の一例を説明するための図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について図面を参照しながら説明する。
【0016】
本発明の実施形態に係る位置情報取得装置100は、例えば、携帯電話やPDA(Personal Digital Assistant)等の携帯端末(例えば、図1に示すようなタッチパネル式の携帯端末)である。位置情報取得装置100は、撮像機能や録音機能等の各種機能を備えていて、これら機能を実行したときの「時間」と「位置」を動作履歴として保存する。なお、以下の説明では、理解を容易にするため、動作履歴の保存対象となる処理は「画像の撮像」として説明する。
【0017】
以下、位置情報取得装置100の構成について説明する。
位置情報取得装置100は、図2に示すように、受信部110と、記憶部120と、表示部130と、操作部140と、撮像部150と、タイマ160と、バッテリ170と、制御部180とから構成される。
【0018】
受信部110は、衛星測位システム(例えば、GPS(Global Positioning System)やガリレオ測位システム(Galileo Positioning System)等)の航法衛星からの電波を受信する受信機から構成される。受信部110は、航法衛星から電波を受信すると、受信した電波に含まれる情報を基に現在位置(例えば、東経139度44分28秒、北緯35度39分29秒という情報。以下、「現在位置情報」という。)を算出し、制御部180に送信する。なお、以下の説明では、理解を容易にするため、現在位置情報は、例えば図3に示すように、地図上のある位置を原点Oとした座標情報(x,y)として説明する。
【0019】
受信部110は、2つの動作モード(「省電力モード」と「通常モード」)を有している。「省電力モード」は航法衛星からの電波の受信を停止する等して最小限の電力消費で動作するモードである。また、「通常モード」は通常の電力消費で動作するモードであり、例えば、航法衛星から電波を受信して現在位置を算出する等の動作をするモードである。受信部110は制御部180から動作停止を命令する情報(以下、「動作停止命令」という。)を受信すると省電力モードに移行する。また、制御部180から動作開始を命令する情報(以下、「動作開始命令」という。)を受信すると通常モードに移行する。
【0020】
図2に戻り、記憶部120は、ハードディスクやフラッシュメモリ等の読み書き可能な不揮発性の記憶装置から構成される。記憶部120は「移動履歴」「処理実行時刻」「動作履歴」等の各種データを記録する。
【0021】
「移動履歴」は、現在時刻とその時刻における現在位置情報とを関連付けた情報である。移動履歴は、制御部180によって所定時間毎(例えば、5分毎)に取得され、例えば図4に示す(a)のように、逐次、記憶部120に蓄積される。
【0022】
「処理実行時刻」は、所定の処理(例えば、画像の撮像)を実行したときの時刻である。処理実行時刻は制御部180によって取得され、例えば図4に示す(b)のように、所定の処理を実行した時に一時的に記憶部120に保存される。
【0023】
「動作履歴」は、処理実行時刻とその時刻における位置情報(以下、「処理実行位置」という。)を関連付けた情報である。動作履歴は制御部180によって取得され、例えば図4に示す(c)のように、随時、記憶部120に蓄積される。
【0024】
図2に戻り、表示部130は、LCD(Liquid Crystal Display:液晶ディスプレイ)やOELD(Organic EctroLuminescence Display:有機ELディスプレイ)等の表示装置から構成される。表示部130は制御部180の制御に従って画像や映像を表示する。
【0025】
操作部140は、位置入力センサ141、メニューボタン142、電源ボタン143等の各種ユーザインターフェースから構成される。
【0026】
位置入力センサ141は、タッチパネル等の位置入力装置から構成される。位置入力センサ141は透明のシート状、もしくは透明の板状をしており、表示部130の画像表示部分全体を覆うように設置されている。位置入力センサ141の表面には導電膜が形成されている。ユーザが位置入力センサ141の上から表示部130を押すと、位置入力センサ141は、導電膜の静電容量の変化を捉えてユーザの指の位置を検出し、検出した指の位置を座標情報として制御部180に送信する。
【0027】
メニューボタン142は、表示部130にメニュー画面等を表示させるためのボタンである。メニュー画面には各種機能(例えば、画像撮像機能、映像撮像機能、メール送信機能等)を起動するためのボタンが配置されていて、ユーザはこれらのボタンをタッチすることで、位置入力センサ141を介して各種機能を起動する。
【0028】
電源ボタン143は、位置情報取得装置100に電源を投入するためのボタンである。ユーザはこの電源ボタン143を押すことで位置情報取得装置100に電源を投入する。
【0029】
撮像部150は、CCD(Charge Coupled Device Image Sensor)カメラやCMOS(Complementary Metal Oxide Semiconductor)カメラ等の撮像装置から構成される。撮像部150は制御部180の制御に従って撮像を実行し、撮像した画像を制御部180に送信する。
【0030】
タイマ160は、クロック回路等の計時装置から構成される。タイマ160は現在時刻(例えば、現在の日付(年月日)、時間(時分秒)等)を計時して、制御部180に対し計時した現在時刻を送信する。
【0031】
また、タイマ160はタイマ機能も備えている。タイマ160は制御部180から時間がセットされると、セットされた時間のカウントダウンを開始する。そして、タイマ160はカウントダウンが終了したら制御部180に対して時間の経過を示す情報(以下、「時間経過通知」という。)を送信する。
【0032】
バッテリ170は、例えば、リチウムイオン電池等の二次電池から構成される。バッテリ170は位置情報取得装置100の各部に電力を供給する。
【0033】
制御部180は、プロセッサ等の処理装置から構成される。制御部180は不図示のROM(Read Only Memory)に格納されているプログラムに従って動作し、後述の「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」を含む種々の動作を実行する。
【0034】
制御部180は、「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」に従って動作することで、図5に示すように、移動履歴取得部181、処理実行時刻取得部182、画像撮像処理部183、動作履歴取得部184、処理実行位置算出部185として機能する(これら機能の動作については、「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」の説明の箇所で述べる)。
【0035】
制御部180は、マルチプロセス(マルチタスク)式のオペレーティングシステムに従って動作する。そのため、制御部180は「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」等の各種処理を並行して実行可能である。なお、以下の説明では、理解を容易にするため、「移動履歴取得処理」「画像撮像処理」「動作履歴取得処理」を実行するプロセスを、それぞれ「移動履歴取得プロセス」「画像撮像プロセス」「動作履歴取得プロセス」と呼ぶ。
【0036】
次に、このような構成を有する位置情報取得装置100の動作について説明する。
位置情報取得装置100の動作は、「移動履歴取得処理」と「画像撮像処理」と「動作履歴取得処理」とに分けられる。
移動履歴取得処理は、所定時間毎(例えば、5分毎)に、「現在時刻」とその現在時刻における「現在位置情報」とを取得し、それらの情報を関連付けた情報を「移動履歴」として取得するための処理である。
「画像撮像処理」は、撮像部150を制御して撮像を実行するとともに、撮像を実行したときの時刻を「処理実行時刻」として取得するための処理である。
「動作履歴取得処理」は、画像撮像処理で取得された「処理実行時刻」とその処理実行時刻における現在位置を「処理実行位置」として取得し、それらを関連付けた情報を「動作履歴」として取得するための処理である。
【0037】
最初に「移動履歴取得処理」について説明する。
【0038】
位置情報取得装置100に電源が投入されると、制御部180はオペレーティングシステムに対して「移動履歴取得プロセス」の生成を命令する。制御部180は移動履歴取得プロセスが生成されると、そのプロセス内で「移動履歴取得処理」を開始する。以下、図6のフローチャートを参照して「移動履歴取得処理」を説明する。
【0039】
移動履歴取得部181は、受信部110に対して動作開始命令を送信する。受信部110は移動履歴取得部181から動作開始命令が送信されると、通常モードに移行し、航法衛星からの電波の受信を開始する。受信部110は航法衛星から電波を受信すると、受信した電波に含まれる情報を基づいて現在位置情報(x,y)を算出する。そして、受信部110は算出した現在位置情報を移動履歴取得部181に対して送信する。移動履歴取得部181は受信部110から現在位置情報を受信すると、受信した情報を不図示のRAM(Random Access Memory)に保存する。保存が完了すると、移動履歴取得部181は、バッテリを節約するため、受信部110に対して動作停止命令を送信する。受信部110は移動履歴取得部181から動作停止命令を受信すると、省電力モードに移行して電力消費を抑制するとともに、移動履歴取得部181から動作開始命令が送信されるのを待機する(ステップS101)。
【0040】
次に、移動履歴取得部181は、タイマ160に対して現在時刻の送信を要求する。タイマ160は移動履歴取得部181から現在時刻の送信要求を受信すると、移動履歴取得部181に対して現在時刻tを送信する。移動履歴取得部181はタイマ160から現在時刻tを受信すると、受信した現在時刻tを不図示のRAMに保存する(ステップS102)。
【0041】
移動履歴取得部181は、ステップS101で取得した現在位置情報(x,y)と、ステップS102で取得した現在時刻tとを関連付け、例えば、図7に示すように、移動履歴として記憶部120に蓄積する(ステップS103)。
【0042】
図6に戻り、移動履歴の蓄積が完了すると、移動履歴取得部181は次の移動履歴を取得するまでの時間待機する。具体的には、次のステップ(ステップS104とステップS105)を実行して所定の時間(例えば5分)待機する。なお、「所定の時間」は5分毎に限定されない。「所定の時間」は、位置情報取得装置100が動作している間、移動履歴を取得することによる消費電力が、ユーザによる装置の使用に支障の少ない消費電力となるような間隔であることが好ましい。なお、「所定の時間」は、バッテリ170の残電力量が所定量以下の場合(例えば、残電力量が10パーセント以下の場合)に所定量以上の残電力量の時より長い間隔となるように変化させてもよい。
【0043】
まず、移動履歴取得部181は、タイマ160に対して所定の時間をセットする(ステップS104)。タイマ160は所定の時間がセットされると、セットされた時間のカウントダウンを開始する。タイマ160は、所定の時間が経過すると、移動履歴取得部181に対して時間経過通知を送信する。
【0044】
移動履歴取得部181は、タイマ160から時間経過通知を受信したか否か判別する(ステップS105)。時間経過通知を受信していない場合(ステップS105:No)、通知を受信するまでステップS105を繰り返す。時間経過通知を受信した場合(ステップS105:Yes)、ステップS101に戻り、再び移動履歴の取得を開始する。
【0045】
次に「画像撮像処理」について説明する。
【0046】
ユーザのメニュー画面操作等により画像撮像機能が選択されると、制御部180はオペレーティングシステムに対し「画像撮像プロセス」の生成を命令する。オペレーティングシステムによって画像撮像プロセスが生成されると、制御部180はそのプロセス内で「画像撮像処理」を開始する。以下、図8のフローチャートを参照して「画像撮像処理」を説明する。
【0047】
画像撮像処理部183は、表示部130に、シャッターボタンが表示された撮像実行画面を表示する(ステップS201)。
【0048】
画像撮像処理部183は、位置入力センサ141から送信される座標情報を基に、ユーザが画面中のシャッターボタンをタッチしたか否か判別する(ステップS202)。シャッターボタンがタッチされていない場合(ステップS202:No)、シャッターボタンがタッチされるまでステップS202を繰り返す。シャッターボタンがタッチされた場合(ステップS202:Yes)、ステップS203に進む。
【0049】
シャッターボタンがタッチされた場合、処理実行時刻取得部182はタイマ160に対して現在時刻の送信を要求する。タイマ160は処理実行時刻取得部182から要求を受信すると、処理実行時刻取得部182に対して現在時刻を送信する。処理実行時刻取得部182はタイマ160から現在時刻を受信すると、受信した現在時刻を、図9に示すように、処理実行時刻Tとして記憶部120に保存する(ステップS203)。
【0050】
図8に戻り、処理実行時刻Tの保存が完了したら、画像撮像処理部183は撮像部150を制御して撮像を実行する。撮像が完了したら、画像撮像処理部183は撮像部150が生成した画像データを記憶部120に保存する(ステップS204)。
【0051】
画像データの保存が完了したら、画像撮像処理部183は後述の「動作履歴取得処理」を実行するため、オペレーティングシステムに対し動作履歴取得プロセスの生成を命令する(ステップS205)。
【0052】
動作履歴取得プロセスが生成されたら、画像撮像処理部183は画像撮像処理を終了する。
【0053】
次に「動作履歴取得処理」について説明する。
【0054】
画像撮像処理によって動作履歴取得プロセスが生成されると、制御部180はそのプロセス内で「動作履歴取得処理」を開始する。以下、図10のフローチャートを参照して「動作履歴取得処理」を説明する。
【0055】
動作履歴取得部184は、記憶部120から処理実行時刻Tと処理実行時刻Tの直前に取得された現在位置情報(以下、「現在位置情報t1」という。)を取得する。例えば、記憶部120に、図11(A)に示す(a)のように処理実行時刻T(=12時45分8秒)が保存されおり、また、図11(A)に示す(b)のように移動履歴(移動履歴25、24、・・・・)が蓄積されているとすれば、図11(A)に示す(c)の12時45分00秒が現在位置情報t1である。動作履歴取得部184は、処理実行時刻Tと現在位置情報t1との差(T−t1)を算出し、不図示のRAMに保存する(ステップS301)。
【0056】
図10に戻り、動作履歴取得部184は、処理実行時刻Tと現在位置情報t1との差(T−t1)が所定時間c1以内か否か(例えば、10秒以内か否か)判別する(ステップS302)。
【0057】
差(T−t1)が所定時間c1以内の場合(ステップS302:Yes)、動作履歴取得部184は現在位置情報t1に関連付けられた現在位置情報(例えば、図11(A)に示す(d)の(13589,24680)。以下、「現在位置情報(x1,y1)」という。)を処理実行位置(以下、処理実行位置(X,Y)という。)として不図示のRAMに保存する(ステップS303)。
【0058】
図10のステップS302に戻り、差(T−t1)が所定時間c1より大きい場合(ステップS302:No)、動作履歴取得部184は前述の「移動履歴取得処理」によって記憶部120に新たな位置情報が保存されるまで待機する(ステップS304:No)。
【0059】
記憶部120に新たな位置情報が格納された場合(ステップS304:Yes)、動作履歴取得部184は、記憶部120から処理実行時刻Tと処理実行時刻Tの直後に取得された現在位置情報(以下、「現在位置情報t2」という。)を取得する。例えば、記憶部120に、図11(B)に示す(a)のように処理実行時刻T(=12時49分53秒)が保存されおり、また、図11(B)に示す(b)のように移動履歴(移動履歴26、25、24・・・・)が蓄積されているとすれば、図11(B)に示す(c)の12時50分00秒が現在位置情報t2である。動作履歴取得部184は、現在位置情報t2と処理実行時刻Tとの差(t2−T)を算出し、不図示のRAMに保存する(ステップS305)。
【0060】
図10に戻り、動作履歴取得部184は、処理実行時刻Tと現在位置情報t1との差(t2−T)が所定時間c2以内か否か(例えば、10秒以内か否か)判別する(ステップS306)。
【0061】
差(t2−T)が所定時間c2以内の場合(ステップS306:Yes)、動作履歴取得部184は現在位置情報t2に関連付けられた現在位置情報(例えば、図11(B)に示す(d)の(13945,24920)。以下、「現在位置情報(x2,y2)」という。)を処理実行位置(X,Y)として不図示のRAMに保存する(ステップS307)。
【0062】
図10のステップS306に戻り、差(t2−T)が所定時間c2より大きい場合(ステップS306:No)、処理実行位置算出部185は、ユーザが位置(x1,y1)と(x2,y2)の間を図12に示す(a)のように直線的に等速移動したものと仮定して処理実行位置(X,Y)を算出する(ステップS308)。
【0063】
例えば、処理実行位置算出部185は、図12に示す(b)のように、現在時刻t1からt2までの時間と現在時刻t1から処理実行時刻Tまでの時間との比に基づいて、現在位置情報(x1,y1)と(x2,y2)とを結ぶ直線を内分した位置を処理実行位置(X,Y)として算出する。具体的には、処理実行位置算出部185は下記(式1)〜(式3)により処理実行位置(X,Y)を算出する。
【0064】
α = (T−t1)/(t2―t1) ・・・・・・・・・(式1)
X = x1 + α×(x2−x1) ・・・・・・・・・(式2)
Y = y1 + α×(y2−y1) ・・・・・・・・・(式3)
【0065】
ここで、αは、現在時刻t1からt2までの時間と現在時刻t1から処理実行時刻Tまでの時間との比であり、X、Yはそれぞれ処理実行位置(X,Y)のX、Yの値である。
【0066】
なお、処理実行位置算出部185は、現在時刻t1からt2までの時間と、処理実行時刻Tからt2までの時間と、の比に基づいて、処理実行位置(X,Y)を算出することも可能である。具体的には、処理実行位置算出部185は下記(式4)〜(式6)により処理実行位置(X,Y)を算出する。
【0067】
α = (t2―T)/(t2―t1) ・・・・・・・・・(式4)
X = x2 − α×(x2−x1) ・・・・・・・・・(式5)
Y = y2 − α×(y2−y1) ・・・・・・・・・(式6)
【0068】
ここで、αは、現在時刻t1からt2までの時間と処理実行時刻Tからt2までの時間との比であり、X、Yはそれぞれ処理実行位置(X,Y)のX、Yの値である。
【0069】
処理実行位置算出部185は、算出した処理実行位置(X,Y)を不図示のRAMに保存する(ステップS308)。
【0070】
動作履歴取得部184は、RAMに保存されている処理実行位置(X,Y)を処理実行時刻Tと関連づけ、例えば、図13に示すように、動作履歴として記憶部120に保存する(ステップS309)。
【0071】
保存が終了したら、動作履歴取得部184は動作履歴取得処理を終了する。
【0072】
本実施形態によれば、位置情報取得装置100は、受信部110の計測間隔を変化させたりせず、長い計測間隔のまま一定間隔で動作させているので、いかなる状況で使用しても少ない電力消費で動作できる。その結果、長い動作持続時間を維持できる。
【0073】
また、位置情報取得装置100は、移動履歴をもとに位置情報を線形補間しているので、受信部110の動作間隔が長くても、高い精度の処理実行位置を取得することができる。
【0074】
また、処理実行時刻と受信部110が現在位置情報を取得した現在時刻が所定間隔以内である場合は受信部110が取得した現在位置情報を処理実行位置としているので、例えば短期間に進行方向や移動速度の変化が多数発生するような場合のように、線形補間が有効に働かない場合における誤差を緩和し、処理実行位置の精度をより高めることができる。
【0075】
また、位置情報取得装置100が有する機能は、画像の撮像機能や録音機能に限られない。位置情報取得装置100は、映像の撮像機能、電子メール機能、ブラウザ機能、ワープロ機能、表計算機能、電話機能、アプリケーションソフト実行機能等、さまざまな機能を有することが可能である。このとき、位置情報取得装置100は、これらの機能それぞれについて、処理実行位置(または動作履歴)を取得してもよい。
【0076】
なお、位置情報取得装置100は1つの処理で複数の処理実行位置(または動作履歴)を取得してもよい。例えば、動作履歴や処理実行位置を取得する対象となる処理が、処理開始から処理終了まで所定の時間幅(例えば、1秒以上の時間幅)を要する処理(例えば、映像の撮像機能、録音機能、電話機能等)の場合、処理開始から処理終了まで所定の時間間隔で複数の処理実行位置を取得してもよい。例えば、位置情報取得装置100は以下に示す動作で複数の処理実行位置(または動作履歴)を取得してもよい。
【0077】
まず、処理実行時刻取得部182は、処理が開始された時点でタイマ160から処理開始時刻を取得する。またと処理実行時刻取得部182は、処理が終了された時点でタイマ160から処理終了時刻を取得する。そして、処理実行時刻取得部182は、処理開始時刻と処理終了時刻を基に、所定の時間間隔(例えば10秒間隔)で複数の処理実行時刻を取得する(例えば、処理開始時刻が12時51分00秒で、処理終了時刻が12時51分30秒なのであれば、10秒間隔で、「12時51分00秒」「12時51分10秒」「12時51分20秒」「12時51分30秒」の4つの時刻を処理実行時刻として取得する)。そして処理実行位置算出部185は、取得した複数の処理実行時刻それぞれについて、例えばステップS308で説明した方法を使って処理実行位置を算出する。動作履歴取得部184は、処理実行位置算出部185が算出した複数の処理実行位置と、処理実行時刻取得部182が取得した複数の処理実行時刻とを取得する。そして、動作履歴取得部184は、取得した処理実行位置と処理実行時刻をそれぞれ関連付け、複数の動作履歴を取得する。
【0078】
また、ステップS308では、位置情報取得装置100が位置(x1,y1)と(x2,y2)の間を直線的に等速移動したものと仮定して処理実行位置(X,Y)を算出したが、位置情報取得装置100が地図で示される道路上を等速移動したものと仮定して処理実行位置(X,Y)を算出してもよい。
【0079】
例えば、位置情報取得装置100は例えばカーナビゲーション等に使用される地図情報を予め記憶部120に記憶している。地図情報には道路情報(例えば、所定間隔毎(例えば10m毎)に道路の位置情報が記録された情報)が格納されている。処理実行位置算出部185は、その道路情報に基づいて位置(x1,y1)と(x2,y2)とを結ぶ経路を判別する。判別方法は特定の手法に限られないが、例えば、ダイクストラ法(最短経路問題)等の公知の方法を使用することが可能である。
【0080】
そして、処理実行位置算出部185は、記憶部120に格納された道路情報を基に、図14に示す(a)のように、位置(x1,y1)と(x2,y2)とを結ぶ経路の距離Dを算出する。その後、処理実行位置算出部185は、図14に示す(b)のように、現在時刻t1からt2までの時間と現在時刻t1から処理実行時刻Tまでの時間との比に基づいて、位置(x1,y1)と(x2,y2)とを結ぶ経路を内分した位置を処理実行位置(X,Y)として算出する。具体的には、処理実行位置算出部185は以下のように処理実行位置(X,Y)を算出する。
【0081】
まず、処理実行位置算出部185は、下記(式7)〜(式8)により位置(x1,y1)から処理実行位置(X,Y)までの距離dを算出する。そして処理実行位置算出部185は、位置(x1,y1)から位置(x2,y2)に向かって、経路に沿って距離dほど進んだ位置を処理実行位置(X,Y)として算出する。
【0082】
α = (T−t1)/(t2―t1) ・・・・・・・・・(式7)
d = α × D ・・・・・・・・・(式8)
【0083】
なお、処理実行位置算出部185は、現在時刻t1からt2までの時間と処理実行時刻Tからt2までの時間との比に基づいて、処理実行位置(X,Y)を算出することも可能である。具体的には、処理実行位置算出部185は以下のように処理実行位置(X,Y)を算出する。
【0084】
まず、処理実行位置算出部185は下記(式9)〜(式10)により位置(x2,y2)から処理実行位置(X,Y)までの距離dを算出する。そして処理実行位置算出部185は位置(x2,y2)から位置(x1,y1)に向かって、経路に沿って距離dほど進んだ位置を処理実行位置(X,Y)として算出する。
【0085】
α = (t2―T)/(t2―t1) ・・・・・・・・・(式9)
d = α × D ・・・・・・・・・(式10)
【0086】
これにより、より誤差の少ない処理実行位置を算出することが可能になる。
【0087】
なお、位置情報取得装置100が位置(x1,y1)と(x2,y2)との間を直線等速移動したものとして処理実行位置(X,Y)を算出した場合であっても、地図情報を使ってさらに精度の高い処理実行位置を算出することが可能である。例えば、図12において算出された処理実行位置(X、Y)と地図情報とを照らし合わせて処理実行位置(X、Y)に最も近い道路上の座標を算出する。そして、算出された座標を処理実行位置として取得する。
【0088】
また、処理実行時刻取得部182は、タイマ160を使って処理実行時刻を取得したが、航法衛星からの電波に含まれる時間情報をそのまま処理実行時刻としてもよい。
【0089】
また、位置情報取得装置100は携帯電話やPDAに限られない。例えば、PND(Portable Navigation Device)やノートパソコン等の携帯端末であってもよい。また、位置情報取得装置100はユーザが携帯する携帯端末に限られず、例えば、カーナビゲーション装置やドライブレコーダのように、自動車や列車等の移動体に設置されて使用される装置であってもよい。
【0090】
本実施形態の位置情報取得装置100は、専用のシステムにより実現してもよいし、通常のコンピュータシステムにより実現してもよい。例えば、上述の動作を実行するためのプログラムをコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールして、上述の処理を実行することによって位置情報取得装置100を構成してもよい。また、インターネット等のネットワーク上のサーバ装置が備えるディスク装置に格納しておき、例えばコンピュータにダウンロード等できるようにしてもよい。また、上述の機能を、OSとアプリケーションソフトとの共同により実現してもよい。この場合には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等してもよい。
【0091】
上記プログラムを記録する記録媒体としては、USBメモリ、フレキシブルディスク、CD、DVD、Blu−ray Disc(登録商標)、MO、SDカード、メモリースティック(登録商標)、その他、磁気ディスク、光ディスク、光磁気ディスク、半導体メモリ、磁気テープ等のコンピュータ読取可能な記録媒体を使用することができる。
【0092】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。つまり、本発明の範囲は、実施形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【符号の説明】
【0093】
100 位置情報取得装置
110 受信部
120 記憶部
130 表示部
140 操作部
141 位置入力センサ
142 メニューボタン
143 電源ボタン
150 撮像部
160 タイマ
170 バッテリ
180 制御部
181 移動履歴取得部
182 処理実行時刻取得部
183 画像撮像処理部
184 動作履歴取得部
185 処理実行位置算出部
【特許請求の範囲】
【請求項1】
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得部と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出部と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得部と、を備える、
ことを特徴とする位置情報取得装置。
【請求項2】
前記処理実行位置算出部は、
前記第1の現在時刻から前記第2の現在時刻までの時間と、前記第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ直線を内分することによって前記処理実行位置を算出する、
ことを特徴とする請求項1に記載の位置情報取得装置。
【請求項3】
道路情報を記憶する道路情報記憶部、を備え、
前記処理実行位置算出部は、
前記道路情報記憶部に記憶された道路情報を基に、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を判別し、
前記第1の現在時刻から前記第2の現在時刻までの時間と、第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を内分することによって前記処理実行位置を算出する、
ことを特徴とする請求項1に記載の位置情報取得装置。
【請求項4】
前記動作履歴取得部は、
前記処理実行時刻が前記第1の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第1の現在位置情報を前記処理実行位置として取得し、前記処理実行時刻が前記第2の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第2の現在位置情報を前記処理実行位置として取得し、そのいずれでもない場合、前記処理実行位置算出部によって算出された位置を前記処理実行位置として取得し、
取得した処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の位置情報取得装置。
【請求項5】
前記所定の処理は、処理開始から処理終了まで所定の時間幅を要する処理であって、
前記処理実行時刻取得部は、処理開始から処理終了までの複数の異なった処理実行時刻を取得し、
前記動作履歴取得部は、前記処理実行時刻取得部で取得された処理実行時刻それぞれについて前記処理実行位置を取得する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の位置情報取得装置。
【請求項6】
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得ステップと、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得ステップと、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出ステップと、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得ステップと、を有する、
ことを特徴とする位置情報取得方法。
【請求項7】
コンピュータに、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得機能と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得機能と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出機能と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得機能と、
を実行させるプログラム。
【請求項1】
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得部と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得部と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出部と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得部と、を備える、
ことを特徴とする位置情報取得装置。
【請求項2】
前記処理実行位置算出部は、
前記第1の現在時刻から前記第2の現在時刻までの時間と、前記第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ直線を内分することによって前記処理実行位置を算出する、
ことを特徴とする請求項1に記載の位置情報取得装置。
【請求項3】
道路情報を記憶する道路情報記憶部、を備え、
前記処理実行位置算出部は、
前記道路情報記憶部に記憶された道路情報を基に、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を判別し、
前記第1の現在時刻から前記第2の現在時刻までの時間と、第1の現在時刻から前記処理実行時刻までの時間もしくは前記処理実行時刻から前記第2の現在時刻までの時間と、の比を算出し、
算出した比に基づいて、前記第1の現在位置情報の示す位置と前記第2の現在位置情報の示す位置とを結ぶ経路を内分することによって前記処理実行位置を算出する、
ことを特徴とする請求項1に記載の位置情報取得装置。
【請求項4】
前記動作履歴取得部は、
前記処理実行時刻が前記第1の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第1の現在位置情報を前記処理実行位置として取得し、前記処理実行時刻が前記第2の取得時刻から所定の時間内にあるか否かを判別し、所定の時間内にあると判別した場合、前記第2の現在位置情報を前記処理実行位置として取得し、そのいずれでもない場合、前記処理実行位置算出部によって算出された位置を前記処理実行位置として取得し、
取得した処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の位置情報取得装置。
【請求項5】
前記所定の処理は、処理開始から処理終了まで所定の時間幅を要する処理であって、
前記処理実行時刻取得部は、処理開始から処理終了までの複数の異なった処理実行時刻を取得し、
前記動作履歴取得部は、前記処理実行時刻取得部で取得された処理実行時刻それぞれについて前記処理実行位置を取得する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の位置情報取得装置。
【請求項6】
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得ステップと、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得ステップと、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出ステップと、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得ステップと、を有する、
ことを特徴とする位置情報取得方法。
【請求項7】
コンピュータに、
所定の時間間隔で現在時刻と前記現在時刻における現在位置情報とを取得する移動履歴取得機能と、
所定の処理を実行している時の処理実行時刻を取得する処理実行時刻取得機能と、
前記処理実行時刻より前の時刻に取得された第1の現在位置情報と、前記第1の現在位置情報に対応する第1の現在時刻と、前記処理実行時刻より後の時刻に取得された第2の現在位置情報と、前記第2の現在位置情報に対応する第2の現在時刻と、前記処理実行時刻と、に基づいて、前記処理実行時刻における現在位置を処理実行位置として算出する処理実行位置算出機能と、
前記処理実行位置とその処理実行位置に対応する処理実行時刻とを関連付けて記憶する動作履歴取得機能と、
を実行させるプログラム。
【図1】


【図2】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図3】
【図12】
【図14】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図3】
【図12】
【図14】
【公開番号】特開2013−72779(P2013−72779A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−212817(P2011−212817)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]