
位置情報提供システム
【課題】通信相手のおかれている状況を示す位置情報提供システムを提供する。
【解決手段】ナビゲーション装置1の制御部170は、通信相手であるナビゲーション装置2から送信された位置データを受信すると、自装置の現在位置を示すGPS(Global Positioning System)情報を取得し、自装置の周辺に存在するナビゲーション装置2を判別する。そして、表示部150に表示する表示条件を受け付けて、表示条件を満たすナビゲーション装置2の位置データを時間間隔δtで少なくとも2回取得し、ベクトルデータを生成する。生成したベクトルデータを記憶部130に記憶し、記憶部130に記憶されている地図データとベクトルデータとに基づいて地図画像とベクトルとを合成した合成画像を生成し、表示部150に表示する。
【解決手段】ナビゲーション装置1の制御部170は、通信相手であるナビゲーション装置2から送信された位置データを受信すると、自装置の現在位置を示すGPS(Global Positioning System)情報を取得し、自装置の周辺に存在するナビゲーション装置2を判別する。そして、表示部150に表示する表示条件を受け付けて、表示条件を満たすナビゲーション装置2の位置データを時間間隔δtで少なくとも2回取得し、ベクトルデータを生成する。生成したベクトルデータを記憶部130に記憶し、記憶部130に記憶されている地図データとベクトルデータとに基づいて地図画像とベクトルとを合成した合成画像を生成し、表示部150に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報提供システムに関する。特に、通信相手の速度情報を表示することができる位置情報提供システムに関する。
【背景技術】
【0002】
従来、複数の通信端末の間で相互に通信を行って、各通信端末が他の通信端末の位置情報を取得して、自端末の位置と他の通信端末の位置とに関する情報を表示する技術が開発されている。
【0003】
例えば、特許文献1には、複数の通信端末と位置情報提供サーバとから構成される位置情報提供システムが開示されている。
この位置情報提供システムでは、まず、通信端末が位置情報提供サーバにアクセスする。次いで位置情報提供サーバは、当該通信端末が存在するエリアを判別し、同一エリア内に存在する他の複数の通信端末の位置情報を当該通信端末に送信する。
他の通信端末の位置情報を受信すると、当該通信端末は、相手端末を選択する。次いで当該通信端末は、選択した相手端末の位置情報と、自端末が向かっている方位情報及び現在位置情報と、に基づいて相手端末に対する方向と相手端末までの距離とを求める。そして、当該通信端末は、表示部に相手端末までの距離と相手端末への方向とを表示する。
【0004】
また、例えば、特許文献2には、携帯通信器と車載通信器とから構成される位置情報提供システムが開示されている。
この位置情報提供システムでは、まず、携帯通信器と車載通信器とは、互いに識別情報を送受信し、識別情報に基づいて互いに相手を認証する。互いに相手を認証すると、携帯通信器と車載通信器とは、それぞれの属性情報(例えば車載通信器の場合、車種、車両の色、メーカ名等を示す情報)を送受信する。そして、携帯通信器と車載通信器とは、それぞれ相手通信器の現在位置及び属性情報を表示する。
なお、このシステムの携帯通信器には、振り子センサが搭載されている。この振り子センサによって、携帯通信器のユーザが移動しているのか停止しているのかが判断される。
【特許文献1】特開2003−166849号公報(第6〜8頁、図5〜8)
【特許文献2】特開2002−340587号公報(第4,5頁、図5〜7)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された位置情報提供システムの通信端末は、通信相手までの距離と通信相手への方向とを表示するのみで、通信相手の状況について何ら表示することができなかった。
また、特許文献2に開示された位置情報提供システムの通信機器は、通信相手の位置、向いている方向及び移動・停止の状況を示すことはできるが、通信相手の進行速度や進行方向を示すことはできなかった。
【0006】
本発明は、上記の問題を解決するためになされたものである。本発明は、通信相手のおかれている状況を示す位置情報提供システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の観点に係る位置情報提供システムは、第1の通信部と、前記第1の通信部とネットワークを介して接続された第2の通信部と、から構成され、前記第1の通信部は、前記第2の通信部から送信された情報を取得する情報取得手段と、前記情報に基づいてベクトル情報を生成するベクトル情報生成手段と、前記ベクトル情報と地図を示す地図情報とを記憶する記憶手段と、画像を表示する表示手段と、前記情報取得手段に前記情報を取得させ、前記ベクトル情報生成手段にベクトル情報を生成させ、前記記憶手段に該ベクトル情報を記憶させ、前記記憶手段に記憶されたベクトル情報と地図情報とに基づいて画像を生成し、生成した画像を前記表示手段に表示させる制御手段と、を備え、前記第2の通信部は、自端末の現在位置を示す現在位置情報を取得する現在位置情報取得手段と、前記現在位置情報を含む前記情報を前記第1の通信部に送信する送信手段と、を備えることを特徴とする。
【0008】
例えば、前記情報取得手段は、所定の間隔で周期的に前記情報を取得してもよい。
【0009】
例えば、前記ベクトル情報生成手段は、前記情報に基づいて前記第2の通信部の移動方向と前記第2の通信部の移動速度とを求め、前記移動方向と前記移動速度とを対応付けたベクトル情報を生成し、前記制御手段は、前記移動方向に対応する向きと前記移動速度に比例する大きさとを有するベクトルを生成し、生成したベクトルと前記地図情報が示す地図とを合成した合成画像を生成してもよい。
【0010】
例えば、前記制御手段は、前記移動速度を参照して、所定の移動速度に対応するベクトルと地図画像との合成画像を生成してもよい。
【0011】
例えば、前記ベクトル情報には、前記現在位置情報が付加されており、前記制御手段は、前記現在位置情報を参照して、所定の範囲に対応するベクトルと地図画像との合成画像を生成してもよい。
【0012】
例えば、前記ベクトル情報には、前記第2の通信部が前記情報を送信した時間を示す時間情報が付加されており、前記制御手段は、前記時間情報を参照して、所定の時間帯に対応するベクトルと地図画像との合成画像を生成してもよい。
【0013】
例えば、前記第2の通信部は、移動速度を測定する速度測定手段、をさらに備え、前記送信手段は、前記速度測定手段が測定した速度を示す速度情報を含む前記情報を前記第1の通信部に送信し、前記ベクトル情報生成手段は、前記速度情報が示す速度を前記移動速度に設定してもよい。
【0014】
例えば、前記制御手段は、前記移動速度に応じてベクトルの線種及び色彩のうち少なくともいずれか1つを変更してもよい。
【発明の効果】
【0015】
本発明によれば、通信相手がおかれている状況を示す位置情報提供システムを提供することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の実施の形態について説明する。
【0017】
本実施の形態に係る位置情報提供システムを構成する通信端末が携帯電話と車両に搭載されるナビゲーション装置とで構成される例について説明する。
【0018】
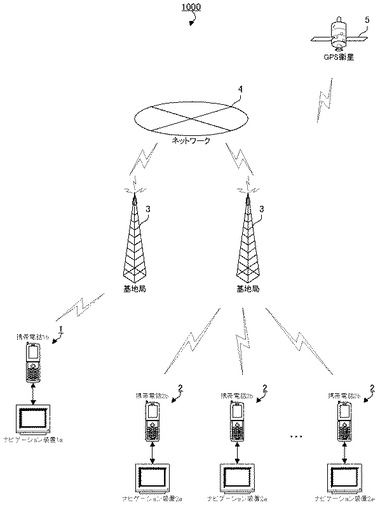
本実施の形態に係る位置情報提供システム1000は、図1に示すように、ナビゲーション装置1aと携帯電話1bとで構成される通信端末1と、ナビゲーション装置2aと携帯電話2bとで構成される複数の通信端末2と、基地局3と、ネットワーク4と、GPS(Global Positioning System;全地球測位システム)衛星5と、から構成される。
【0019】
なお、携帯電話1b及び各携帯電話2bは、実質的に同一であり、同様の機能を備え、同様の動作を行う。また、ナビゲーション装置1a及び各ナビゲーション装置2aも、実質的に同一であり、同様の機能を備え、同様の動作を行う。したがって、通信端末1と各通信端末2とは、実質的に同一であり、同様の機能を備え、同様の動作を行う。
【0020】
携帯電話1bは、基地局3に接続してネットワーク4を介して携帯電話2bとデータ通信を行う。そして、携帯電話1bは、ナビゲーション装置2aが搭載されている車両の位置を示す位置データを取得して、ナビゲーション装置1aに供給する。
【0021】
ナビゲーション装置1aは、車両に搭載され、携帯電話1bから供給された位置データを取得してナビゲーション装置2aを搭載する車両の位置を求め、表示部に表示する。また、ナビゲーション装置1aは、GPS衛星5から送信される信号を受信して、自装置の位置を特定する。
【0022】
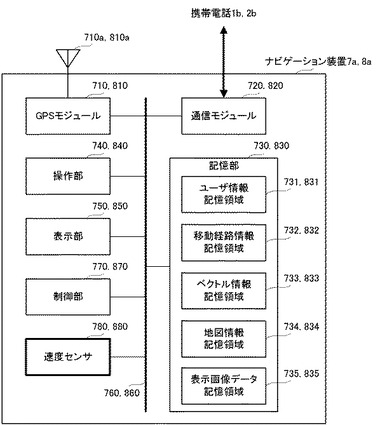
次に、ナビゲーション装置1a,2aの構成について、図2を参照して説明する。上述の通り、ナビゲーション装置1a,2aは、実質的に同一であり、構成も同一である。そこで、ナビゲーション装置1aを例に、その構成を説明する。
【0023】
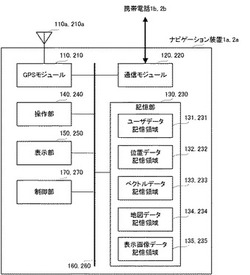
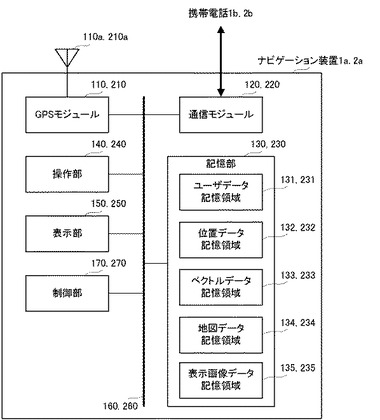
ナビゲーション装置1aは、GPSアンテナ110aと、GPSモジュール110と、通信モジュール120と、記憶部130と、操作部140と、表示部150と、通信バス160と、制御部170と、を備える。
【0024】
GPSアンテナ110aは、ヘリカル型アンテナ、誘電体アンテナ又はパッチ型平面アンテナ等から構成される。GPSアンテナ110aは、所定のGPS衛星が発信するスペクトラム拡散変調された衛星電波を受信する。
【0025】
GPSモジュール110は、複数のGPS衛星5から送信され、GPSアンテナ110aが受信した衛星電波に同調する。同調後、GPSモジュール110は、各衛星電波をそれぞれ逆拡散復調して複数のGPS衛星信号を取得する。GPSモジュール110は、取得したそれぞれのGPS衛星信号を用いて、各衛星電波の到達時間の差を算出する。この算出結果に基づいて、GPSモジュール110は、緯度、経度及び高度等からなる位置情報を生成する。GPSモジュール110は、所定のタイミング毎に、生成した位置情報を制御部170に供給する。
【0026】
通信モジュール120は、携帯電話1bから供給された信号を、制御部170が処理可能なデータに変換する。変換後、通信モジュール120は、変換したデータを制御部170に供給する。また、通信モジュール120は、制御部170から供給されたデータ信号を携帯電話1bに供給する。
【0027】
記憶部130は、HDD(Hard Disk Drive)、RAM(Random Access Memory)等から構成され、ナビゲーション装置1a全体を制御するプログラムや携帯電話2bから送信されたデータ等を記憶する。記憶部130は、データの種類毎に記憶領域を備える。具体的には、記憶部130は、ユーザデータ記憶領域131と、位置データ記憶領域132と、ベクトルデータ記憶領域133と、地図データ記憶領域134と、表示画像データ記憶領域135と、を備える。
【0028】
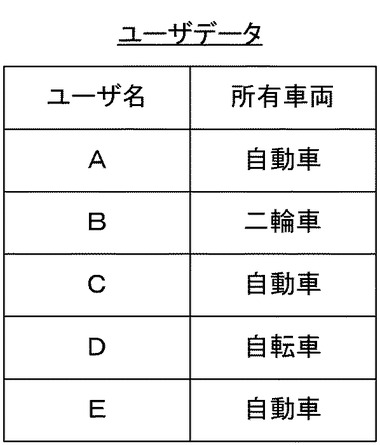
ユーザデータ記憶領域131は、各ナビゲーション装置2aのユーザに関するデータを記憶する記憶領域である。ユーザデータは、例えば図3に示すように、ナビゲーション装置2aのユーザ名と各ユーザが所有する車両とが対応付けられたデータ構成を備える。
【0029】
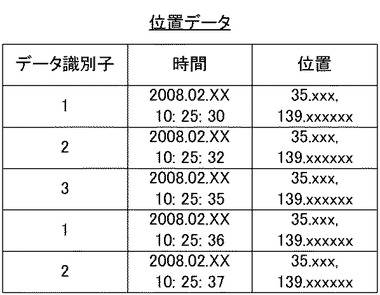
位置データ記憶領域132は、各ナビゲーション装置2aを搭載する車両の位置を示すデータを記憶する記憶領域である。位置データは、例えば図4に示すように、ナビゲーション装置2aの識別子と、時間と、位置とが対応付けられたデータ構成を備える。
【0030】
ベクトルデータ記憶領域133は、位置データ記憶領域132に記憶されている位置データから生成されたベクトルデータを記憶する記憶領域である。ベクトルデータは、例えば図5に示すように、ユーザ名と、位置と、時間と、車両の移動方向と、車両の移動速度とが対応付けられたデータ構成を備える。
【0031】
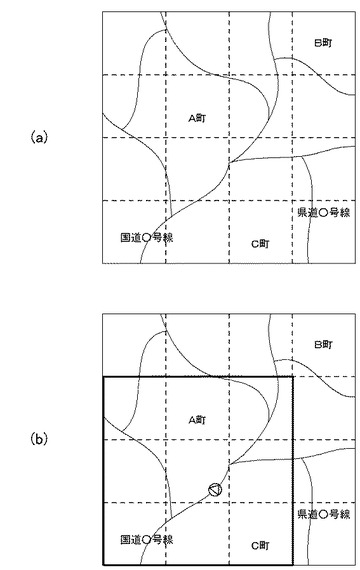
地図データ記憶領域134は、例えば図6(a)に示すような道路網、川、建築物等を示す画像を生成するのに必要なデータを記憶する記憶領域である。
制御部170は、表示部150に画像を表示するとき、全領域の地図データを読み出すのではなく、地図を図6(b)の破線で示すような碁盤目状に細分化し、ナビゲーション装置1aを搭載する車両が含まれる領域とその周辺の領域(太実線で示す領域)を示す地図データのみを読み出す。
【0032】
表示画像データ記憶領域135は、制御部170で生成し、表示部150に表示する画像のデータを記憶する記憶領域である。
【0033】
操作部140は、キーボード等から構成され、ユーザによって操作され、入力された操作情報を制御部170に供給する。
【0034】
表示部150は、LCD(Liquid Crystal Display)等から構成され、制御部150が生成した画像等を表示する。
【0035】
通信バス160は、GPSモジュール110と、通信モジュール120と、記憶部130と、操作部140と、表示部150と、制御部170とを接続し、各部間を伝搬する信号を伝送する。
【0036】
制御部170は、CPU(Central Processing Unit)、ROM(Read Only Memory)等から構成され、ROMに格納されたプログラムに従って、ナビゲーション装置1a全体を制御する。例えば、制御部170は、記憶部130の地図データ記憶領域134に記憶されている地図データを読み出し、通信端末2から送信された位置データに基づいて、ナビゲーション装置2aを搭載する車両の位置を示す画像を生成し、表示部150に表示する。
【0037】
次に、上記構成の位置情報提供システム1000の動作について、図7〜10を参照して説明する。
【0038】
具体的には、ナビゲーション装置1aが携帯電話1bとネットワーク4と携帯電話2bとを介してナビゲーション装置2aとデータ通信を実行し、ナビゲーション装置2aを搭載する車両が移動した軌跡をベクトル表示する処理について説明する。
【0039】
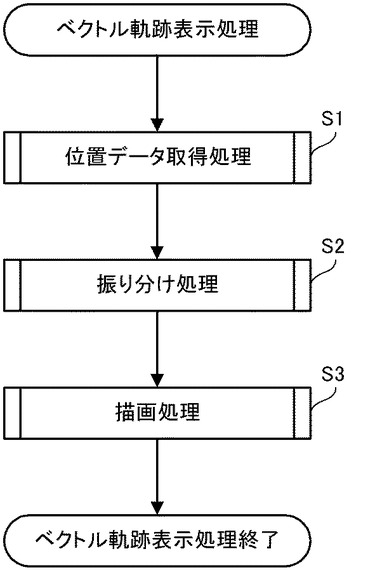
ナビゲーション装置1aと携帯電話1bとの電源がそれぞれ投入され、ナビゲーション装置1aの操作部140からベクトル軌跡表示を行うアプリケーションを起動する操作情報が供給されると、制御部170は、図7のフローチャートで示すベクトル軌跡表示処理を開始する。
【0040】
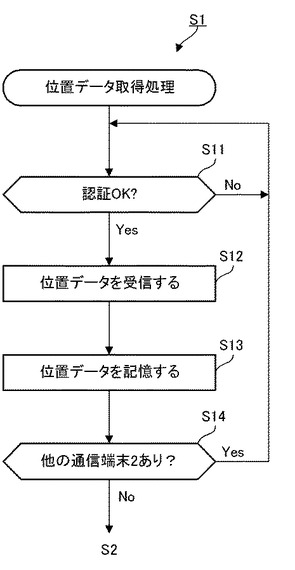
まず、制御部170は、位置データ取得処理(ステップS1)を開始する。位置データ取得処理(ステップS1)について、図8のフローチャートを参照して説明する。
【0041】
制御部170は、複数の通信端末2のうち任意の通信端末2から送信されたデータを受信し、認証処理を行う(ステップS11)。例えば、データ通信が可能な全ての通信端末2から送信されるデータを受信し、受信したデータを解析することにより、任意の通信端末2を認証する。認証することができなかった場合(ステップS11;No)、制御部170は、処理をステップS11に戻し、他の通信端末2の認証処理を実行する(ステップS11)。
【0042】
認証に成功した場合(ステップS11;Yes)、制御部170は、認証に成功した通信端末2から位置データを取得し(ステップS12)、記憶部130の位置データ記憶領域132に記憶する(ステップS13)。
【0043】
そして、データ通信が可能な他の通信端末2があるか否かを判別する(ステップS14)。データ通信が可能な他の通信端末2があると判別した場合(ステップS14;Yes)、制御部170は、処理をステップS11に戻す。データ通信が可能な他の通信端末2がないと判別した場合(ステップS14;No)、制御部170は、処理を振り分け処理(ステップS2)に進める。
【0044】
この位置データ取得処理により、制御部170は、複数の通信端末2のうち認証に成功した通信端末2から位置データを取得することができる。
【0045】
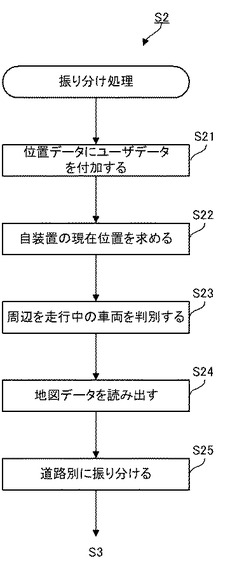
続いて、振り分け処理(ステップS2)について、図9のフローチャートを参照して説明する。
【0046】
まず、制御部170は、記憶部130の位置データ記憶領域132に記憶されている位置データにユーザデータ記憶領域131に記憶されているユーザデータを付加する(ステップS21)。
【0047】
次に、制御部170は、GPS衛星5から受信したGPSデータを取得し、ナビゲーション装置1aを搭載した車両の現在位置を求める(ステップS22)。
【0048】
現在位置を求めると、制御部170は、ナビゲーション装置1aを搭載した車両の現在位置から所定の範囲内を走行する車両に搭載されたナビゲーション装置2aを判別する(ステップS23)。
【0049】
周辺を走行する車両に搭載されたナビゲーション装置2aを判別すると、制御部170は、記憶部130の地図データ記憶領域134に記憶されている地図データを読み出す(ステップS24)。
【0050】
そして、制御部170は、判別したナビゲーション装置2aを搭載した車両を道路別に振り分けて(ステップS25)、処理を描画処理(ステップS3)に進める。
【0051】
具体的には、位置データにユーザデータを付加する処理(ステップS21の処理)では、例えば、図4に示す位置データを取得した場合、図3に示すユーザデータを参照して、データ識別子1にユーザAを対応させ、データ識別子2にユーザBを対応させてもよい。
【0052】
また、ナビゲーション装置2aを判別する処理(ステップS23の処理)では、例えば、ステップS23の処理を実行するときに表示部150に表示されている領域内を走行している車両のナビゲーション装置2aを判別するようにしてもよい。
【0053】
また、ナビゲーション装置2aを搭載した車両を道路別に振り分ける処理(ステップS25の処理)では、例えば、車両X,Y,Zがそれぞれルート1、ルート2、ルート1を走行中の場合、制御部170は、「ルート1を走行中の車両・・・車両X,Z」、「ルート2を走行中の車両・・・車両Y」と振り分けてもよい。
【0054】
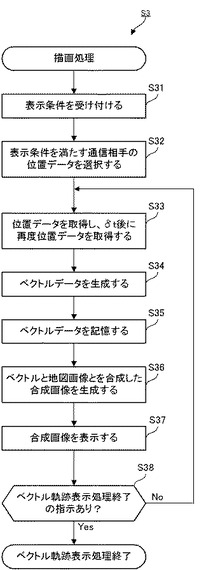
続いて、描画処理(ステップS3)について、図10のフローチャートを参照して説明する。
【0055】
まず、制御部170は、ユーザによって操作部140を操作され、操作部140から供給された操作情報に基づいて、表示部150に表示する表示条件を受け付ける(ステップS31)。この表示条件とは、例えば、自車位置から所定範囲内、登録された通信端末全て、自動車および二輪車等の条件のことである。
【0056】
表示条件を受け付けると、制御部170は、条件に合致する位置データを選択する(ステップS32)。
【0057】
位置データを選択すると、選択した位置データに対応するナビゲーション装置2aを搭載する車両の現在の位置データを受信する(ステップS33)。ここで、ベクトルを生成するには、少なくとも2つの位置データが必要である。そこでステップS33において、制御部170は、位置データを取得してδt後に再び位置データを取得する。ステップS31で受け付けた表示条件を満たす通信端末2が複数ある場合、制御部170は、順次ステップS33の処理を実行し、表示条件を満たす全ての通信端末2の位置データを取得する。
【0058】
続いて、制御部170は、ステップS33で受信した位置データに基づいて、ベクトルを生成する(ステップS34)。ベクトルの大きさは、通信端末2を搭載する車両の速度に比例し、その向きは、車両の移動方向を示す。
【0059】
ベクトルを生成すると、制御部170は、ベクトルデータとその属性データ(ユーザ名、日時、位置等)とを対応付けて記憶部130のベクトルデータ記憶領域133に記憶する(ステップS35)。
【0060】
次いで、制御部170は、記憶部130のベクトルデータ記憶領域133に記憶されたベクトルデータと地図データ記憶領域に記憶された地図データとに基づいて、ベクトルと地図画像とを合成した合成画像を生成する(ステップS36)。
【0061】
そして、制御部170は、ステップS36で生成した合成画像を表示部150に表示する(ステップS37)。
【0062】
合成画像を表示すると、制御部170は、ベクトル軌跡表示処理を終了する旨の操作情報が操作部140から供給されたか否かを判別する(ステップS38)。操作情報が供給されたと判別した場合(ステップS38;Yes)、制御部170は、ベクトル軌跡表示処理を終了する。一方、操作情報が供給されなかったと判別した場合(ステップS38;No)、制御部170は、処理をステップS33に戻す。以降、ステップS38において操作情報が供給されるまで、制御部170は、ステップS33〜ステップS38の処理を繰り返し実行する。
【0063】
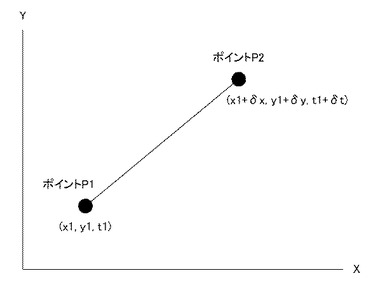
具体的には、ベクトルを生成する処理(ステップS34の処理)では、例えば、図11に示すように、ナビゲーション装置2のユーザが時間t1にポイントP1、その後時間t1+δtにポイントP2にいる場合について説明する。この場合、制御部170は、次の式(1)
(δx2+δy2)1/2/δt・・・(1)
でユーザの速度を求め、δxとδyとの正負を含めた大きさから移動方向を求める。そして、制御部170は、式(1)で求めた速度の大きさに比例した長さの矢印と、求めた移動方向とからベクトルを生成する。
【0064】
また、ベクトルを生成する処理では、例えば、予め移動速度とベクトルの大きさを対応付けたテーブルを記憶部130に記憶しておく。具体的には、所定の長さを1として、0〜20km/hの場合は矢印の長さを1、20〜40km/hの場合は矢印の長さ2等のように設定し、記憶部130に記憶する。そして、車両の速度に応じた長さを有する矢印を表示部150に表示するようにしてもよい。
【0065】
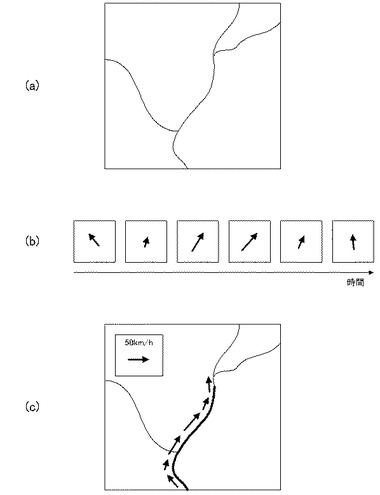
また、ベクトルデータと地図データとに基づいて合成画像を生成する処理(ステップS36の処理)では、例えば、地図データに基づいて生成される地図画像が図12(a)に示す画像で、ベクトルデータに基づいて生成したベクトルが図12(b)に示すベクトルの場合、制御部170は、図12(a)に示す地図画像と、図12(b)に示すベクトルとを合成し、図12(c)に示すような合成画像を生成する。
【0066】
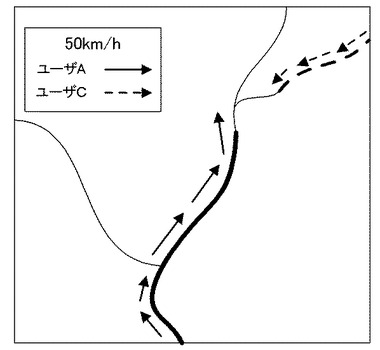
また、地図画像とベクトルとを合成する場合、例えば、制御部170は、ベクトルデータの時間情報、位置情報を参照して、所定の時間帯、所定の範囲におけるベクトルのみを表示するようにしてもよい。例えば、ユーザA,B,Cが所有する通信端末2とデータ通信を行い、ユーザAとユーザCとが所定の範囲内を走行している場合、図13に示すように、ユーザA及びユーザCの移動軌跡のみを表示するようにしてもよい。
【0067】
このベクトル軌跡表示処理により、通信端末のユーザは、通信相手の位置情報に加えて移動方向及び移動速度を把握することができる。そして、通信端末のユーザは、通信相手が置かれている状況(例えば、渋滞に巻き込まれている等)を把握することができる。
【0068】
また、通信相手の置かれている状況を把握できることにより、通信端末のユーザは、通信相手と接触するまでの時間を予測することができる。例えば、通信相手と待ち合わせをする場合、あと5分で通信相手が来ると予測できれば、その場で待てばよいし、あと30分程度かかると予測できれば、店に入って過ごす等の対応をとることができる。
【0069】
以上、本発明の実施の形態について説明したが、本発明を実施するにあたっては、種々の変形及び応用が可能であり、上記実施の形態に限られるものではない。
【0070】
車両に搭載するナビゲーション装置に限らず、例えば、PHS(Personal Handyphone System)、PDA(Personal Digital Assistants)、電子腕時計、ノート型PC等にも適用できる。
【0071】
例えば、ナビゲーション装置間のデータ通信では、携帯電話ではなく、無線LAN接続等を用いてもよい。また、例えば、ナビゲーション装置に通信アンテナ及び通信モジュールを備え、ナビゲーション装置間で直接データ通信を行うようにしてもよい。
【0072】
また、例えば、携帯電話1bから連続的に信号を取得し、取得した信号を一定の間隔で周期的に制御部170に供給してもよい。または、携帯電話1bが携帯電話2bから供給される信号を一定の間隔で周期的に受信し、受信する毎に通信モジュール120に供給してもよい。
【0073】
また、例えば、軌跡の表示/非表示を選択するようにしてもよい。さらに、例えば、指定した時間帯のベクトル軌跡を表示するようにしてもよい。この場合、ベクトルに付加されているベクトル生成時間を参照して、指定した時間帯に生成されたベクトルのみを表示すればよい。
【0074】
また、複数のユーザとデータ通信を行う場合には、ユーザ毎にベクトルの表示形式、例えば、ベクトルの色、太さなどを変更してもよい。また、同一のユーザでも、ベクトルの線種を変更してもよい。例えば、速度が遅い場合にはベクトルを赤色で表示し、速度が速い場合にはベクトルを青色で表示してもよい。
【0075】
また、例えば、過去のデータを利用して、表示してもよい。例えば、40km/h〜60km/hで走行しているユーザのみ表示する、等の条件を満たすユーザのみを表示してもよい。
【0076】
また、例えば、通信相手との通信が途絶した場合、通信を再開するか否かを確認するメッセージを表示部に表示するようにしてもよい。
【0077】
また、例えば、通信相手の移動速度が所定の速度よりも小さい場合や通信相手が所定の時間停止している場合等は、通信相手が渋滞、事故等に遭遇している可能性がある。このような場合に、表示部にその旨を表示するようにしてもよい。
【0078】
また、上記の実施の形態に係る通信端末では、通信相手の位置データのみから通信相手の移動速度を求めた。その他にも、例えば、図14に示すように、速度センサを設けてもよい。速度センサを設けることにより、移動速度を求める処理が不要となる。
【0079】
また、上記の実施の形態では、ナビゲーション装置は車両に搭載されたが、車両以外にも、例えば船舶、飛行機等にも搭載してもよい。または、例えば、同一の構成を携帯電話に組み込んで、人の移動経路を携帯電話の表示部に表示するようにしてもよい。
【図面の簡単な説明】
【0080】
【図1】本実施の形態に係る位置情報提供システム全体の構成の一例を示す図である。
【図2】本実施の形態に係る位置情報提供システムを構成するナビゲーション装置の構成の一例を示す図である。
【図3】ユーザデータのデータ構造の一例を示す図である。
【図4】位置データのデータ構造の一例を示す図である。
【図5】ベクトルデータのデータ構造の一例を示す図である。
【図6】(a)、(b)は、地図データに基づいて生成される地図の一例を示す図である。
【図7】図2に示す制御部が実行するベクトル軌跡表示処理のフローチャートである。
【図8】図2に示す制御部が実行する位置データ取得処理のフローチャートである。
【図9】図2に示す制御部が実行する振り分け処理のフローチャートである。
【図10】図2に示す制御部が実行する描画処理のフローチャートである。
【図11】位置データに基づいてベクトルデータを生成する方法について説明するために用いる図である。
【図12】(a)は、図2の表示部で表示される画像の一例である。(b)は、図2の制御部が生成するベクトルの一例である。(c)は、図2に示す表示部で表示される画像の一例である。
【図13】図2の表示部で表示される画像の一例である。
【図14】本実施の形態に係る位置情報提供システムを構成するナビゲーション装置の構成の変形例を示す図である。
【符号の説明】
【0081】
1,2・・・通信端末、1a,2a,7a,8a・・・ナビゲーション装置、1b,2b・・・携帯電話、3・・・基地局、4・・・ネットワーク、5・・・GPS(Global Positioning System)衛星、110a,210a・・・GPSアンテナ、110,210・・・GPSモジュール、120a,220a・・・通信アンテナ、120,220・・・通信モジュール、130,230・・・記憶部、140,240・・・操作部、150,250・・・表示部、160,260・・・通信バス、170,270・・・制御部、780,880・・・速度センサ、1000・・・位置情報提供システム
【技術分野】
【0001】
本発明は、位置情報提供システムに関する。特に、通信相手の速度情報を表示することができる位置情報提供システムに関する。
【背景技術】
【0002】
従来、複数の通信端末の間で相互に通信を行って、各通信端末が他の通信端末の位置情報を取得して、自端末の位置と他の通信端末の位置とに関する情報を表示する技術が開発されている。
【0003】
例えば、特許文献1には、複数の通信端末と位置情報提供サーバとから構成される位置情報提供システムが開示されている。
この位置情報提供システムでは、まず、通信端末が位置情報提供サーバにアクセスする。次いで位置情報提供サーバは、当該通信端末が存在するエリアを判別し、同一エリア内に存在する他の複数の通信端末の位置情報を当該通信端末に送信する。
他の通信端末の位置情報を受信すると、当該通信端末は、相手端末を選択する。次いで当該通信端末は、選択した相手端末の位置情報と、自端末が向かっている方位情報及び現在位置情報と、に基づいて相手端末に対する方向と相手端末までの距離とを求める。そして、当該通信端末は、表示部に相手端末までの距離と相手端末への方向とを表示する。
【0004】
また、例えば、特許文献2には、携帯通信器と車載通信器とから構成される位置情報提供システムが開示されている。
この位置情報提供システムでは、まず、携帯通信器と車載通信器とは、互いに識別情報を送受信し、識別情報に基づいて互いに相手を認証する。互いに相手を認証すると、携帯通信器と車載通信器とは、それぞれの属性情報(例えば車載通信器の場合、車種、車両の色、メーカ名等を示す情報)を送受信する。そして、携帯通信器と車載通信器とは、それぞれ相手通信器の現在位置及び属性情報を表示する。
なお、このシステムの携帯通信器には、振り子センサが搭載されている。この振り子センサによって、携帯通信器のユーザが移動しているのか停止しているのかが判断される。
【特許文献1】特開2003−166849号公報(第6〜8頁、図5〜8)
【特許文献2】特開2002−340587号公報(第4,5頁、図5〜7)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された位置情報提供システムの通信端末は、通信相手までの距離と通信相手への方向とを表示するのみで、通信相手の状況について何ら表示することができなかった。
また、特許文献2に開示された位置情報提供システムの通信機器は、通信相手の位置、向いている方向及び移動・停止の状況を示すことはできるが、通信相手の進行速度や進行方向を示すことはできなかった。
【0006】
本発明は、上記の問題を解決するためになされたものである。本発明は、通信相手のおかれている状況を示す位置情報提供システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の観点に係る位置情報提供システムは、第1の通信部と、前記第1の通信部とネットワークを介して接続された第2の通信部と、から構成され、前記第1の通信部は、前記第2の通信部から送信された情報を取得する情報取得手段と、前記情報に基づいてベクトル情報を生成するベクトル情報生成手段と、前記ベクトル情報と地図を示す地図情報とを記憶する記憶手段と、画像を表示する表示手段と、前記情報取得手段に前記情報を取得させ、前記ベクトル情報生成手段にベクトル情報を生成させ、前記記憶手段に該ベクトル情報を記憶させ、前記記憶手段に記憶されたベクトル情報と地図情報とに基づいて画像を生成し、生成した画像を前記表示手段に表示させる制御手段と、を備え、前記第2の通信部は、自端末の現在位置を示す現在位置情報を取得する現在位置情報取得手段と、前記現在位置情報を含む前記情報を前記第1の通信部に送信する送信手段と、を備えることを特徴とする。
【0008】
例えば、前記情報取得手段は、所定の間隔で周期的に前記情報を取得してもよい。
【0009】
例えば、前記ベクトル情報生成手段は、前記情報に基づいて前記第2の通信部の移動方向と前記第2の通信部の移動速度とを求め、前記移動方向と前記移動速度とを対応付けたベクトル情報を生成し、前記制御手段は、前記移動方向に対応する向きと前記移動速度に比例する大きさとを有するベクトルを生成し、生成したベクトルと前記地図情報が示す地図とを合成した合成画像を生成してもよい。
【0010】
例えば、前記制御手段は、前記移動速度を参照して、所定の移動速度に対応するベクトルと地図画像との合成画像を生成してもよい。
【0011】
例えば、前記ベクトル情報には、前記現在位置情報が付加されており、前記制御手段は、前記現在位置情報を参照して、所定の範囲に対応するベクトルと地図画像との合成画像を生成してもよい。
【0012】
例えば、前記ベクトル情報には、前記第2の通信部が前記情報を送信した時間を示す時間情報が付加されており、前記制御手段は、前記時間情報を参照して、所定の時間帯に対応するベクトルと地図画像との合成画像を生成してもよい。
【0013】
例えば、前記第2の通信部は、移動速度を測定する速度測定手段、をさらに備え、前記送信手段は、前記速度測定手段が測定した速度を示す速度情報を含む前記情報を前記第1の通信部に送信し、前記ベクトル情報生成手段は、前記速度情報が示す速度を前記移動速度に設定してもよい。
【0014】
例えば、前記制御手段は、前記移動速度に応じてベクトルの線種及び色彩のうち少なくともいずれか1つを変更してもよい。
【発明の効果】
【0015】
本発明によれば、通信相手がおかれている状況を示す位置情報提供システムを提供することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の実施の形態について説明する。
【0017】
本実施の形態に係る位置情報提供システムを構成する通信端末が携帯電話と車両に搭載されるナビゲーション装置とで構成される例について説明する。
【0018】
本実施の形態に係る位置情報提供システム1000は、図1に示すように、ナビゲーション装置1aと携帯電話1bとで構成される通信端末1と、ナビゲーション装置2aと携帯電話2bとで構成される複数の通信端末2と、基地局3と、ネットワーク4と、GPS(Global Positioning System;全地球測位システム)衛星5と、から構成される。
【0019】
なお、携帯電話1b及び各携帯電話2bは、実質的に同一であり、同様の機能を備え、同様の動作を行う。また、ナビゲーション装置1a及び各ナビゲーション装置2aも、実質的に同一であり、同様の機能を備え、同様の動作を行う。したがって、通信端末1と各通信端末2とは、実質的に同一であり、同様の機能を備え、同様の動作を行う。
【0020】
携帯電話1bは、基地局3に接続してネットワーク4を介して携帯電話2bとデータ通信を行う。そして、携帯電話1bは、ナビゲーション装置2aが搭載されている車両の位置を示す位置データを取得して、ナビゲーション装置1aに供給する。
【0021】
ナビゲーション装置1aは、車両に搭載され、携帯電話1bから供給された位置データを取得してナビゲーション装置2aを搭載する車両の位置を求め、表示部に表示する。また、ナビゲーション装置1aは、GPS衛星5から送信される信号を受信して、自装置の位置を特定する。
【0022】
次に、ナビゲーション装置1a,2aの構成について、図2を参照して説明する。上述の通り、ナビゲーション装置1a,2aは、実質的に同一であり、構成も同一である。そこで、ナビゲーション装置1aを例に、その構成を説明する。
【0023】
ナビゲーション装置1aは、GPSアンテナ110aと、GPSモジュール110と、通信モジュール120と、記憶部130と、操作部140と、表示部150と、通信バス160と、制御部170と、を備える。
【0024】
GPSアンテナ110aは、ヘリカル型アンテナ、誘電体アンテナ又はパッチ型平面アンテナ等から構成される。GPSアンテナ110aは、所定のGPS衛星が発信するスペクトラム拡散変調された衛星電波を受信する。
【0025】
GPSモジュール110は、複数のGPS衛星5から送信され、GPSアンテナ110aが受信した衛星電波に同調する。同調後、GPSモジュール110は、各衛星電波をそれぞれ逆拡散復調して複数のGPS衛星信号を取得する。GPSモジュール110は、取得したそれぞれのGPS衛星信号を用いて、各衛星電波の到達時間の差を算出する。この算出結果に基づいて、GPSモジュール110は、緯度、経度及び高度等からなる位置情報を生成する。GPSモジュール110は、所定のタイミング毎に、生成した位置情報を制御部170に供給する。
【0026】
通信モジュール120は、携帯電話1bから供給された信号を、制御部170が処理可能なデータに変換する。変換後、通信モジュール120は、変換したデータを制御部170に供給する。また、通信モジュール120は、制御部170から供給されたデータ信号を携帯電話1bに供給する。
【0027】
記憶部130は、HDD(Hard Disk Drive)、RAM(Random Access Memory)等から構成され、ナビゲーション装置1a全体を制御するプログラムや携帯電話2bから送信されたデータ等を記憶する。記憶部130は、データの種類毎に記憶領域を備える。具体的には、記憶部130は、ユーザデータ記憶領域131と、位置データ記憶領域132と、ベクトルデータ記憶領域133と、地図データ記憶領域134と、表示画像データ記憶領域135と、を備える。
【0028】
ユーザデータ記憶領域131は、各ナビゲーション装置2aのユーザに関するデータを記憶する記憶領域である。ユーザデータは、例えば図3に示すように、ナビゲーション装置2aのユーザ名と各ユーザが所有する車両とが対応付けられたデータ構成を備える。
【0029】
位置データ記憶領域132は、各ナビゲーション装置2aを搭載する車両の位置を示すデータを記憶する記憶領域である。位置データは、例えば図4に示すように、ナビゲーション装置2aの識別子と、時間と、位置とが対応付けられたデータ構成を備える。
【0030】
ベクトルデータ記憶領域133は、位置データ記憶領域132に記憶されている位置データから生成されたベクトルデータを記憶する記憶領域である。ベクトルデータは、例えば図5に示すように、ユーザ名と、位置と、時間と、車両の移動方向と、車両の移動速度とが対応付けられたデータ構成を備える。
【0031】
地図データ記憶領域134は、例えば図6(a)に示すような道路網、川、建築物等を示す画像を生成するのに必要なデータを記憶する記憶領域である。
制御部170は、表示部150に画像を表示するとき、全領域の地図データを読み出すのではなく、地図を図6(b)の破線で示すような碁盤目状に細分化し、ナビゲーション装置1aを搭載する車両が含まれる領域とその周辺の領域(太実線で示す領域)を示す地図データのみを読み出す。
【0032】
表示画像データ記憶領域135は、制御部170で生成し、表示部150に表示する画像のデータを記憶する記憶領域である。
【0033】
操作部140は、キーボード等から構成され、ユーザによって操作され、入力された操作情報を制御部170に供給する。
【0034】
表示部150は、LCD(Liquid Crystal Display)等から構成され、制御部150が生成した画像等を表示する。
【0035】
通信バス160は、GPSモジュール110と、通信モジュール120と、記憶部130と、操作部140と、表示部150と、制御部170とを接続し、各部間を伝搬する信号を伝送する。
【0036】
制御部170は、CPU(Central Processing Unit)、ROM(Read Only Memory)等から構成され、ROMに格納されたプログラムに従って、ナビゲーション装置1a全体を制御する。例えば、制御部170は、記憶部130の地図データ記憶領域134に記憶されている地図データを読み出し、通信端末2から送信された位置データに基づいて、ナビゲーション装置2aを搭載する車両の位置を示す画像を生成し、表示部150に表示する。
【0037】
次に、上記構成の位置情報提供システム1000の動作について、図7〜10を参照して説明する。
【0038】
具体的には、ナビゲーション装置1aが携帯電話1bとネットワーク4と携帯電話2bとを介してナビゲーション装置2aとデータ通信を実行し、ナビゲーション装置2aを搭載する車両が移動した軌跡をベクトル表示する処理について説明する。
【0039】
ナビゲーション装置1aと携帯電話1bとの電源がそれぞれ投入され、ナビゲーション装置1aの操作部140からベクトル軌跡表示を行うアプリケーションを起動する操作情報が供給されると、制御部170は、図7のフローチャートで示すベクトル軌跡表示処理を開始する。
【0040】
まず、制御部170は、位置データ取得処理(ステップS1)を開始する。位置データ取得処理(ステップS1)について、図8のフローチャートを参照して説明する。
【0041】
制御部170は、複数の通信端末2のうち任意の通信端末2から送信されたデータを受信し、認証処理を行う(ステップS11)。例えば、データ通信が可能な全ての通信端末2から送信されるデータを受信し、受信したデータを解析することにより、任意の通信端末2を認証する。認証することができなかった場合(ステップS11;No)、制御部170は、処理をステップS11に戻し、他の通信端末2の認証処理を実行する(ステップS11)。
【0042】
認証に成功した場合(ステップS11;Yes)、制御部170は、認証に成功した通信端末2から位置データを取得し(ステップS12)、記憶部130の位置データ記憶領域132に記憶する(ステップS13)。
【0043】
そして、データ通信が可能な他の通信端末2があるか否かを判別する(ステップS14)。データ通信が可能な他の通信端末2があると判別した場合(ステップS14;Yes)、制御部170は、処理をステップS11に戻す。データ通信が可能な他の通信端末2がないと判別した場合(ステップS14;No)、制御部170は、処理を振り分け処理(ステップS2)に進める。
【0044】
この位置データ取得処理により、制御部170は、複数の通信端末2のうち認証に成功した通信端末2から位置データを取得することができる。
【0045】
続いて、振り分け処理(ステップS2)について、図9のフローチャートを参照して説明する。
【0046】
まず、制御部170は、記憶部130の位置データ記憶領域132に記憶されている位置データにユーザデータ記憶領域131に記憶されているユーザデータを付加する(ステップS21)。
【0047】
次に、制御部170は、GPS衛星5から受信したGPSデータを取得し、ナビゲーション装置1aを搭載した車両の現在位置を求める(ステップS22)。
【0048】
現在位置を求めると、制御部170は、ナビゲーション装置1aを搭載した車両の現在位置から所定の範囲内を走行する車両に搭載されたナビゲーション装置2aを判別する(ステップS23)。
【0049】
周辺を走行する車両に搭載されたナビゲーション装置2aを判別すると、制御部170は、記憶部130の地図データ記憶領域134に記憶されている地図データを読み出す(ステップS24)。
【0050】
そして、制御部170は、判別したナビゲーション装置2aを搭載した車両を道路別に振り分けて(ステップS25)、処理を描画処理(ステップS3)に進める。
【0051】
具体的には、位置データにユーザデータを付加する処理(ステップS21の処理)では、例えば、図4に示す位置データを取得した場合、図3に示すユーザデータを参照して、データ識別子1にユーザAを対応させ、データ識別子2にユーザBを対応させてもよい。
【0052】
また、ナビゲーション装置2aを判別する処理(ステップS23の処理)では、例えば、ステップS23の処理を実行するときに表示部150に表示されている領域内を走行している車両のナビゲーション装置2aを判別するようにしてもよい。
【0053】
また、ナビゲーション装置2aを搭載した車両を道路別に振り分ける処理(ステップS25の処理)では、例えば、車両X,Y,Zがそれぞれルート1、ルート2、ルート1を走行中の場合、制御部170は、「ルート1を走行中の車両・・・車両X,Z」、「ルート2を走行中の車両・・・車両Y」と振り分けてもよい。
【0054】
続いて、描画処理(ステップS3)について、図10のフローチャートを参照して説明する。
【0055】
まず、制御部170は、ユーザによって操作部140を操作され、操作部140から供給された操作情報に基づいて、表示部150に表示する表示条件を受け付ける(ステップS31)。この表示条件とは、例えば、自車位置から所定範囲内、登録された通信端末全て、自動車および二輪車等の条件のことである。
【0056】
表示条件を受け付けると、制御部170は、条件に合致する位置データを選択する(ステップS32)。
【0057】
位置データを選択すると、選択した位置データに対応するナビゲーション装置2aを搭載する車両の現在の位置データを受信する(ステップS33)。ここで、ベクトルを生成するには、少なくとも2つの位置データが必要である。そこでステップS33において、制御部170は、位置データを取得してδt後に再び位置データを取得する。ステップS31で受け付けた表示条件を満たす通信端末2が複数ある場合、制御部170は、順次ステップS33の処理を実行し、表示条件を満たす全ての通信端末2の位置データを取得する。
【0058】
続いて、制御部170は、ステップS33で受信した位置データに基づいて、ベクトルを生成する(ステップS34)。ベクトルの大きさは、通信端末2を搭載する車両の速度に比例し、その向きは、車両の移動方向を示す。
【0059】
ベクトルを生成すると、制御部170は、ベクトルデータとその属性データ(ユーザ名、日時、位置等)とを対応付けて記憶部130のベクトルデータ記憶領域133に記憶する(ステップS35)。
【0060】
次いで、制御部170は、記憶部130のベクトルデータ記憶領域133に記憶されたベクトルデータと地図データ記憶領域に記憶された地図データとに基づいて、ベクトルと地図画像とを合成した合成画像を生成する(ステップS36)。
【0061】
そして、制御部170は、ステップS36で生成した合成画像を表示部150に表示する(ステップS37)。
【0062】
合成画像を表示すると、制御部170は、ベクトル軌跡表示処理を終了する旨の操作情報が操作部140から供給されたか否かを判別する(ステップS38)。操作情報が供給されたと判別した場合(ステップS38;Yes)、制御部170は、ベクトル軌跡表示処理を終了する。一方、操作情報が供給されなかったと判別した場合(ステップS38;No)、制御部170は、処理をステップS33に戻す。以降、ステップS38において操作情報が供給されるまで、制御部170は、ステップS33〜ステップS38の処理を繰り返し実行する。
【0063】
具体的には、ベクトルを生成する処理(ステップS34の処理)では、例えば、図11に示すように、ナビゲーション装置2のユーザが時間t1にポイントP1、その後時間t1+δtにポイントP2にいる場合について説明する。この場合、制御部170は、次の式(1)
(δx2+δy2)1/2/δt・・・(1)
でユーザの速度を求め、δxとδyとの正負を含めた大きさから移動方向を求める。そして、制御部170は、式(1)で求めた速度の大きさに比例した長さの矢印と、求めた移動方向とからベクトルを生成する。
【0064】
また、ベクトルを生成する処理では、例えば、予め移動速度とベクトルの大きさを対応付けたテーブルを記憶部130に記憶しておく。具体的には、所定の長さを1として、0〜20km/hの場合は矢印の長さを1、20〜40km/hの場合は矢印の長さ2等のように設定し、記憶部130に記憶する。そして、車両の速度に応じた長さを有する矢印を表示部150に表示するようにしてもよい。
【0065】
また、ベクトルデータと地図データとに基づいて合成画像を生成する処理(ステップS36の処理)では、例えば、地図データに基づいて生成される地図画像が図12(a)に示す画像で、ベクトルデータに基づいて生成したベクトルが図12(b)に示すベクトルの場合、制御部170は、図12(a)に示す地図画像と、図12(b)に示すベクトルとを合成し、図12(c)に示すような合成画像を生成する。
【0066】
また、地図画像とベクトルとを合成する場合、例えば、制御部170は、ベクトルデータの時間情報、位置情報を参照して、所定の時間帯、所定の範囲におけるベクトルのみを表示するようにしてもよい。例えば、ユーザA,B,Cが所有する通信端末2とデータ通信を行い、ユーザAとユーザCとが所定の範囲内を走行している場合、図13に示すように、ユーザA及びユーザCの移動軌跡のみを表示するようにしてもよい。
【0067】
このベクトル軌跡表示処理により、通信端末のユーザは、通信相手の位置情報に加えて移動方向及び移動速度を把握することができる。そして、通信端末のユーザは、通信相手が置かれている状況(例えば、渋滞に巻き込まれている等)を把握することができる。
【0068】
また、通信相手の置かれている状況を把握できることにより、通信端末のユーザは、通信相手と接触するまでの時間を予測することができる。例えば、通信相手と待ち合わせをする場合、あと5分で通信相手が来ると予測できれば、その場で待てばよいし、あと30分程度かかると予測できれば、店に入って過ごす等の対応をとることができる。
【0069】
以上、本発明の実施の形態について説明したが、本発明を実施するにあたっては、種々の変形及び応用が可能であり、上記実施の形態に限られるものではない。
【0070】
車両に搭載するナビゲーション装置に限らず、例えば、PHS(Personal Handyphone System)、PDA(Personal Digital Assistants)、電子腕時計、ノート型PC等にも適用できる。
【0071】
例えば、ナビゲーション装置間のデータ通信では、携帯電話ではなく、無線LAN接続等を用いてもよい。また、例えば、ナビゲーション装置に通信アンテナ及び通信モジュールを備え、ナビゲーション装置間で直接データ通信を行うようにしてもよい。
【0072】
また、例えば、携帯電話1bから連続的に信号を取得し、取得した信号を一定の間隔で周期的に制御部170に供給してもよい。または、携帯電話1bが携帯電話2bから供給される信号を一定の間隔で周期的に受信し、受信する毎に通信モジュール120に供給してもよい。
【0073】
また、例えば、軌跡の表示/非表示を選択するようにしてもよい。さらに、例えば、指定した時間帯のベクトル軌跡を表示するようにしてもよい。この場合、ベクトルに付加されているベクトル生成時間を参照して、指定した時間帯に生成されたベクトルのみを表示すればよい。
【0074】
また、複数のユーザとデータ通信を行う場合には、ユーザ毎にベクトルの表示形式、例えば、ベクトルの色、太さなどを変更してもよい。また、同一のユーザでも、ベクトルの線種を変更してもよい。例えば、速度が遅い場合にはベクトルを赤色で表示し、速度が速い場合にはベクトルを青色で表示してもよい。
【0075】
また、例えば、過去のデータを利用して、表示してもよい。例えば、40km/h〜60km/hで走行しているユーザのみ表示する、等の条件を満たすユーザのみを表示してもよい。
【0076】
また、例えば、通信相手との通信が途絶した場合、通信を再開するか否かを確認するメッセージを表示部に表示するようにしてもよい。
【0077】
また、例えば、通信相手の移動速度が所定の速度よりも小さい場合や通信相手が所定の時間停止している場合等は、通信相手が渋滞、事故等に遭遇している可能性がある。このような場合に、表示部にその旨を表示するようにしてもよい。
【0078】
また、上記の実施の形態に係る通信端末では、通信相手の位置データのみから通信相手の移動速度を求めた。その他にも、例えば、図14に示すように、速度センサを設けてもよい。速度センサを設けることにより、移動速度を求める処理が不要となる。
【0079】
また、上記の実施の形態では、ナビゲーション装置は車両に搭載されたが、車両以外にも、例えば船舶、飛行機等にも搭載してもよい。または、例えば、同一の構成を携帯電話に組み込んで、人の移動経路を携帯電話の表示部に表示するようにしてもよい。
【図面の簡単な説明】
【0080】
【図1】本実施の形態に係る位置情報提供システム全体の構成の一例を示す図である。
【図2】本実施の形態に係る位置情報提供システムを構成するナビゲーション装置の構成の一例を示す図である。
【図3】ユーザデータのデータ構造の一例を示す図である。
【図4】位置データのデータ構造の一例を示す図である。
【図5】ベクトルデータのデータ構造の一例を示す図である。
【図6】(a)、(b)は、地図データに基づいて生成される地図の一例を示す図である。
【図7】図2に示す制御部が実行するベクトル軌跡表示処理のフローチャートである。
【図8】図2に示す制御部が実行する位置データ取得処理のフローチャートである。
【図9】図2に示す制御部が実行する振り分け処理のフローチャートである。
【図10】図2に示す制御部が実行する描画処理のフローチャートである。
【図11】位置データに基づいてベクトルデータを生成する方法について説明するために用いる図である。
【図12】(a)は、図2の表示部で表示される画像の一例である。(b)は、図2の制御部が生成するベクトルの一例である。(c)は、図2に示す表示部で表示される画像の一例である。
【図13】図2の表示部で表示される画像の一例である。
【図14】本実施の形態に係る位置情報提供システムを構成するナビゲーション装置の構成の変形例を示す図である。
【符号の説明】
【0081】
1,2・・・通信端末、1a,2a,7a,8a・・・ナビゲーション装置、1b,2b・・・携帯電話、3・・・基地局、4・・・ネットワーク、5・・・GPS(Global Positioning System)衛星、110a,210a・・・GPSアンテナ、110,210・・・GPSモジュール、120a,220a・・・通信アンテナ、120,220・・・通信モジュール、130,230・・・記憶部、140,240・・・操作部、150,250・・・表示部、160,260・・・通信バス、170,270・・・制御部、780,880・・・速度センサ、1000・・・位置情報提供システム
【特許請求の範囲】
【請求項1】
第1の通信部と、前記第1の通信部とネットワークを介して接続された第2の通信部と、から構成され、
前記第1の通信部は、
前記第2の通信部から送信された情報を取得する情報取得手段と、
前記情報に基づいてベクトル情報を生成するベクトル情報生成手段と、
前記ベクトル情報と地図を示す地図情報とを記憶する記憶手段と、
画像を表示する表示手段と、
前記情報取得手段に前記情報を取得させ、前記ベクトル情報生成手段にベクトル情報を生成させ、前記記憶手段に該ベクトル情報を記憶させ、前記記憶手段に記憶されたベクトル情報と地図情報とに基づいて画像を生成し、生成した画像を前記表示手段に表示させる制御手段と、を備え、
前記第2の通信部は、
自端末の現在位置を示す現在位置情報を取得する現在位置情報取得手段と、
前記現在位置情報を含む前記情報を前記第1の通信部に送信する送信手段と、を備える、
ことを特徴とする位置情報提供システム。
【請求項2】
前記情報取得手段は、所定の間隔で周期的に前記情報を取得する、
ことを特徴とする請求項1に記載の位置情報提供システム。
【請求項3】
前記ベクトル情報生成手段は、前記情報に基づいて前記第2の通信部の移動方向と前記第2の通信部の移動速度とを求め、前記移動方向と前記移動速度とを対応付けたベクトル情報を生成し、
前記制御手段は、前記移動方向に対応する向きと前記移動速度に比例する大きさとを有するベクトルを生成し、生成したベクトルと前記地図情報が示す地図とを合成した合成画像を生成する、
ことを特徴とする請求項1又は2の位置情報提供システム。
【請求項4】
前記制御手段は、前記移動速度を参照して、所定の移動速度に対応するベクトルと地図画像との合成画像を生成する、
ことを特徴とする請求項3に記載の位置情報提供システム。
【請求項5】
前記ベクトル情報には、前記現在位置情報が付加されており、
前記制御手段は、前記現在位置情報を参照して、所定の範囲に対応するベクトルと地図画像との合成画像を生成する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の位置情報提供システム。
【請求項6】
前記ベクトル情報には、前記第2の通信部が前記情報を送信した時間を示す時間情報が付加されており、
前記制御手段は、前記時間情報を参照して、所定の時間帯に対応するベクトルと地図画像との合成画像を生成する、
ことを特徴とする請求項1乃至5のいずれか1項に記載の位置情報提供システム。
【請求項7】
前記第2の通信部は、移動速度を測定する速度測定手段、をさらに備え、
前記送信手段は、前記速度測定手段が測定した速度を示す速度情報を含む前記情報を前記第1の通信部に送信し、
前記ベクトル情報生成手段は、前記速度情報が示す速度を前記移動速度に設定する、
ことを特徴とする請求項3又は4に記載の位置情報提供システム。
【請求項8】
前記制御手段は、前記移動速度に応じてベクトルの線種及び色彩のうち少なくともいずれか1つを変更する、
ことを特徴とする請求項1乃至7のいずれか1項に記載の位置情報提供システム。
【請求項1】
第1の通信部と、前記第1の通信部とネットワークを介して接続された第2の通信部と、から構成され、
前記第1の通信部は、
前記第2の通信部から送信された情報を取得する情報取得手段と、
前記情報に基づいてベクトル情報を生成するベクトル情報生成手段と、
前記ベクトル情報と地図を示す地図情報とを記憶する記憶手段と、
画像を表示する表示手段と、
前記情報取得手段に前記情報を取得させ、前記ベクトル情報生成手段にベクトル情報を生成させ、前記記憶手段に該ベクトル情報を記憶させ、前記記憶手段に記憶されたベクトル情報と地図情報とに基づいて画像を生成し、生成した画像を前記表示手段に表示させる制御手段と、を備え、
前記第2の通信部は、
自端末の現在位置を示す現在位置情報を取得する現在位置情報取得手段と、
前記現在位置情報を含む前記情報を前記第1の通信部に送信する送信手段と、を備える、
ことを特徴とする位置情報提供システム。
【請求項2】
前記情報取得手段は、所定の間隔で周期的に前記情報を取得する、
ことを特徴とする請求項1に記載の位置情報提供システム。
【請求項3】
前記ベクトル情報生成手段は、前記情報に基づいて前記第2の通信部の移動方向と前記第2の通信部の移動速度とを求め、前記移動方向と前記移動速度とを対応付けたベクトル情報を生成し、
前記制御手段は、前記移動方向に対応する向きと前記移動速度に比例する大きさとを有するベクトルを生成し、生成したベクトルと前記地図情報が示す地図とを合成した合成画像を生成する、
ことを特徴とする請求項1又は2の位置情報提供システム。
【請求項4】
前記制御手段は、前記移動速度を参照して、所定の移動速度に対応するベクトルと地図画像との合成画像を生成する、
ことを特徴とする請求項3に記載の位置情報提供システム。
【請求項5】
前記ベクトル情報には、前記現在位置情報が付加されており、
前記制御手段は、前記現在位置情報を参照して、所定の範囲に対応するベクトルと地図画像との合成画像を生成する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の位置情報提供システム。
【請求項6】
前記ベクトル情報には、前記第2の通信部が前記情報を送信した時間を示す時間情報が付加されており、
前記制御手段は、前記時間情報を参照して、所定の時間帯に対応するベクトルと地図画像との合成画像を生成する、
ことを特徴とする請求項1乃至5のいずれか1項に記載の位置情報提供システム。
【請求項7】
前記第2の通信部は、移動速度を測定する速度測定手段、をさらに備え、
前記送信手段は、前記速度測定手段が測定した速度を示す速度情報を含む前記情報を前記第1の通信部に送信し、
前記ベクトル情報生成手段は、前記速度情報が示す速度を前記移動速度に設定する、
ことを特徴とする請求項3又は4に記載の位置情報提供システム。
【請求項8】
前記制御手段は、前記移動速度に応じてベクトルの線種及び色彩のうち少なくともいずれか1つを変更する、
ことを特徴とする請求項1乃至7のいずれか1項に記載の位置情報提供システム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−236558(P2009−236558A)
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2008−80463(P2008−80463)
【出願日】平成20年3月26日(2008.3.26)
【出願人】(000003595)株式会社ケンウッド (1,981)
【Fターム(参考)】
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成20年3月26日(2008.3.26)
【出願人】(000003595)株式会社ケンウッド (1,981)
【Fターム(参考)】
[ Back to top ]