
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報補正システムに関し、特に、GPSで測位した位置情報を補正することができるようにした位置情報補正システムに関する。
【背景技術】
【0002】
近年、自装置の位置を測位するために、携帯端末装置にGPS(Global Positioning System)が搭載されるようになってきた。例えば、特許文献1には、携帯端末装置が受信したGPS衛星信号を位置情報提供サーバーに送信し、位置情報提供サーバーで、携帯端末装置から送られたGPS衛星信号に基づいて携帯端末装置の位置を算出し、当該位置をマッピングしてなるマッピング位置情報を携帯端末装置に配信する技術が提案されている。
【0003】
また、携帯電話機においては、デジタルカメラ付きのものが主流となっており、撮影した写真にGPS位置情報を付加することも技術的には可能である。そこで、写真とGPS位置情報を関連付けて、行動記録や旅の旅行記等に利用したりすることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−64460号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、携帯電話機におけるGPSでの測位は、約10m程度の誤差を含んでおり、屋内などでは、位置情報の精度が低くなってしまう課題があった。
【0006】
本発明の目的は、GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供することである。
【課題を解決するための手段】
【0007】
本発明の一側面は、ユーザーの位置に対応する位置にある機器の位置を示す位置情報を取得する位置情報取得手段と、位置情報を記憶する記憶手段と、記憶手段に記憶されている位置情報の精度が低い場合、位置情報の取得時刻の前後の時刻の2つの位置情報に基づいて、位置情報を補正する位置情報補正手段とを備えることを特徴とする。
【0008】
以上のように、携帯電話機で測位された位置情報を、位置情報の取得時刻の前後の時刻の2つの位置情報に基づいて補正することにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【0009】
位置情報補正手段は、機器が位置情報が示す位置にあるときの時刻の前後の時刻の2つの位置情報を記憶手段から検索し、検索した2つの位置情報が示す位置を結ぶ直線上の、双方の取得時刻と位置情報の取得時刻の比により算出した位置を示す位置情報で補正する。これにより、容易に位置情報を補正することが可能となる。
【0010】
位置情報補正手段は、検索した2つの位置情報の精度とその位置情報が示す位置により特定される範囲に、補正対象となる位置情報が示す位置が存在する場合に、位置情報を補正する。これにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【0011】
記憶手段は、写真データをさらに記憶し、写真データの撮影時刻の前後の時刻の2つの位置情報を記憶手段から検索し、検索した2つの位置情報の直線上の、双方の取得時刻と写真データの撮影時刻の比により算出した位置を示す位置情報を写真データに付加する位置情報追加手段をさらに備える。これにより、写真データに位置情報が付加されていない場合にも、携帯電話機から取得した位置情報を写真データに付加することが可能となる。
【0012】
本発明の一側面は、ユーザーの位置に対応する位置にある第1の機器の位置が示す第1の位置情報を取得する第1の位置情報取得手段と、ユーザーの位置に対応する位置にある第2の機器の位置が示す第2の位置情報であって、その情報が示す位置精度は、第1の位置情報が示す位置精度よりも高い第2の位置情報を取得する第2の位置情報取得手段と、第1の位置情報および第2の位置情報を、機器毎に記憶する記憶手段と、第2の位置情報を追加して第1の位置情報を補完統合する位置情報追加手段とを備えることを特徴とする。
【0013】
以上のように、携帯電話機で測位された位置情報に、カーナビゲーション装置で測位された位置情報を追加することにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【0014】
位置情報追加手段は、第2の位置情報が示す位置の時刻の前後の時刻の2つの第1の位置情報を記憶手段から検索し、検索した2つの第1の位置情報の精度により位置の範囲を算出し、第2の位置情報が位置の範囲内である場合に、第2の位置情報を第1の位置情報に追加して統合する。これにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【発明の効果】
【0015】
本発明によれば、GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供することができる。
【図面の簡単な説明】
【0016】
【図1】第1の実施の形態における位置情報補正システムの構成例を示す図である。
【図2】記憶部に記憶される情報のデータ構造例を示す図である。
【図3】写真の位置情報を算出する処理を説明するフローチャートである。
【図4】写真の位置情報を補正する処理を説明するフローチャートである。
【図5】写真データの撮影時刻の前後2つの位置情報ログの精度により位置の範囲を算出する方法を説明する図である。
【図6】第2の実施の形態における位置情報補正システムの構成例を示す図である。
【図7】記憶部に記憶される情報のデータ構造例を示す図である。
【図8】補足位置情報ログを主位置情報ログに追加する処理を説明するフローチャートである。
【図9】主位置情報ログに補足位置情報ログが追加された場合のデータ構造例を示す図である。
【発明を実施するための形態】
【0017】
[本発明の第1の実施の形態]
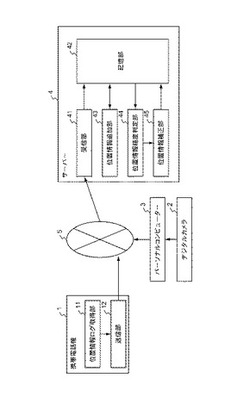
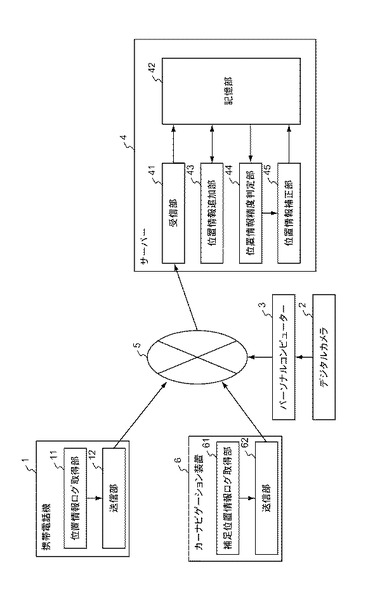
図1は、本発明の第1の実施の形態における位置情報補正システムの構成例を示す図である。この位置情報補正システムにおいては、携帯電話機1、デジタルカメラ2、パーソナルコンピューター3、サーバー4がネットワーク5を介して相互に接続されることで構成される。携帯電話機1とデジタルカメラ2は、1人のユーザーが携帯しているものとする。
【0018】
携帯電話機1は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、メモリー、入力部、表示画面、および位置情報を検出するためのGPS(Global Positioning System)受信機などを実装しており、少なくとも、位置情報ログ取得部11および送信部12の機能を有する。
【0019】
位置情報ログ取得部11は、GPS受信機を用いて位置情報を所定時間(たとえば15分)毎にログとして取得(測位)する。位置情報には、緯度、経度、GPS受信機の状態(測定中/停止中)、測位の信頼性および精度、速度、進行方向、GPSの時刻(原子時計)等が含まれる。送信部12は、通信制御装置、通信ポート等を有し、携帯電話機1とネットワーク5間の通信を媒介する通信インターフェースであり、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。また送信部12は、携帯電話機1のカメラ機能を用いて撮影された写真データを、位置情報ログ取得部11で取得された位置情報ログとともに、ネットワーク5を介してサーバー4に送信する。
【0020】
なお、携帯電話機1の電源がオフされていたり、GPS情報を取得することができない場合もあり、その場合には、送信間隔が空くものとする。また位置情報の精度が特定の閾値より低い場合やGPS受信機の状態が停止中の場合には、位置情報の信頼性が低いと判断し、サーバー4に送信しないようにしても良い。さらに通信費削減を目的として、携帯電話機1側で位置情報ログを所定量保存しておき、送信可能な時にまとめてサーバー4に送信するようにしてもよい。
【0021】
デジタルカメラ2は、CPU、CMOS(Complementary Metal Oxide Semiconductor)センサー、画像処理部、メモリー、出力部、操作部、表示部等を有する撮影装置である。デジタルカメラ2は、たとえばパーソナルコンピューター3とUSB(Universal Serial Bus)接続することができる。デジタルカメラ2で撮影された写真(画像)データは、パーソナルコンピューター3上のアプリケーションにより、ネットワーク5を介してサーバー4に送信される。
【0022】
パーソナルコンピューター3は、CPU、ROM、RAM、HDD(Hard Disk Drive)、入力部、表示部等を有するコンピューターシステムであり、たとえばUSB接続されたデジタルカメラ2から写真データを入手し、ネットワーク5を介してサーバー4に送信する。
【0023】
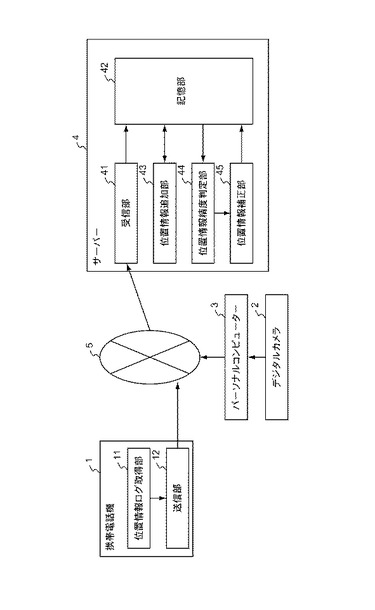
サーバー4は、CPU、ROM、RAM、およびHDDなどを有するコンピューターシステムであり、少なくとも、受信部41、記憶部42、位置情報追加部43、位置情報精度判定部44、および位置情報補正部45の機能を有する。
【0024】
受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させるとともに、ネットワーク5を介してパーソナルコンピューター3から送信されてきたデジタルカメラ2の写真データを受信し、記憶部42に記憶させる。また受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた、位置情報が付加された写真データを受信し、記憶部42に記憶させる。
【0025】
記憶部42は、携帯電話機1から受信した位置情報ログや位置情報ログが付加された写真データ、および、デジタルカメラ2で撮影された写真データを記憶する。
【0026】
図2は、記憶部42に記憶される情報のデータ構造例を示す図である。
【0027】
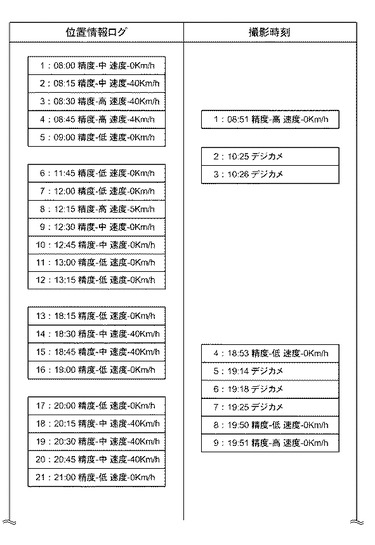
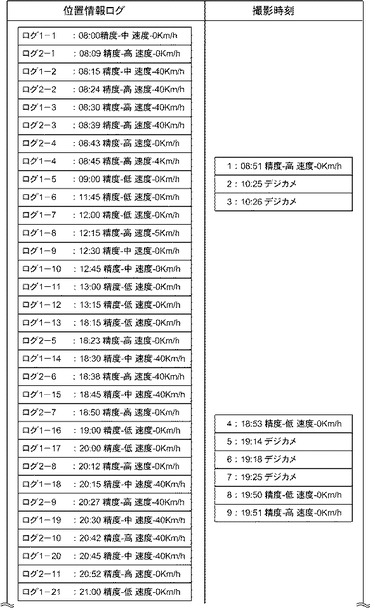
図2に示すように、携帯電話機1から受信した位置情報ログが時系列で記憶されているとともに、デジタルカメラ2で撮影された写真データの撮影時刻および携帯電話機1で撮影された写真データの撮影時刻が時系列で記憶されている。なお、図2には、緯度や経度などは示されていないが、記憶部42内には記憶されており、位置情報ログに関連付けられている。また、写真データの撮影時刻に、写真データの実体が関連付けられている。
【0028】
図2の例では、位置情報ログには、携帯電話機1が位置情報を取得した時刻(以下、取得時刻と称する)、すなわち位置情報が示す位置に携帯電話機1が存在するときの時刻、測位の精度(高、中、低)、速度(km/h)が示されている。また、位置情報が付加されている写真データの撮影時刻には、その位置情報ログが示され、位置情報が付加されていない写真データの撮影時刻には、単に撮影時刻とデジタルカメラ2の名称(デジカメ)が示されている。
【0029】
なお、記憶部42に記憶される位置情報ログのうち、位置変化の少ないデータを削除して記憶容量を確保するようにしても良い。あるいは、携帯電話機1側で、位置変化の少ないデータを予め送信しないようにしても良い。
【0030】
図1の説明に戻る。位置情報追加部43は、記憶部42に記憶されている写真データのうち、位置情報が付加されていない写真データに対し、写真データの撮影時刻から検索した位置情報ログを追加する。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果に基づいて、位置情報ログを補正する。
【0031】
次に、図3のフローチャートを参照して、写真の位置情報を算出する処理について説明する。
【0032】
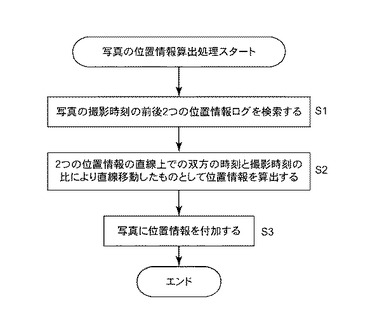
ステップS1において、サーバー2の位置情報追加部43は、記憶部42に記憶されている写真データのうち、位置情報が付加されていない写真データを読み出し、その写真データの撮影時刻の前後の時刻の2つの位置情報ログを記憶部42から検索する。
【0033】
たとえば、図2において、「2:10:25 デジカメ」の撮影時刻を有する写真データには、位置情報が付加されておらず、この写真データの撮影時刻の前後の時刻の2つの位置情報ログを検索する場合、「5:09:00 精度−低 速度−0km/h」と「6:11:45 精度−低 速度−0km/h」が検索される。
【0034】
ステップS2において、位置情報追加部43は、ステップS1で検索した2つの位置情報が示す場所(地点)を結ぶ直線上を直線移動したものとして、双方の取得時刻と写真データの撮影時刻の比により写真データの撮影時刻に対応する位置情報を算出する。ステップS3において、位置情報追加部43は、ステップS2で算出した位置情報を写真データに付加する。
【0035】
以上のように、写真データに位置情報が付加されていない場合には、携帯電話機1から取得した位置情報ログを元に位置情報を算出し、写真データに付加することが可能となる。また、写真データに位置情報ログが付加されていたとしても、その位置情報ログの精度が低い場合には、位置情報が付加されていないものとして、上述したようにして位置情報を付加(変更)することもできる。
【0036】
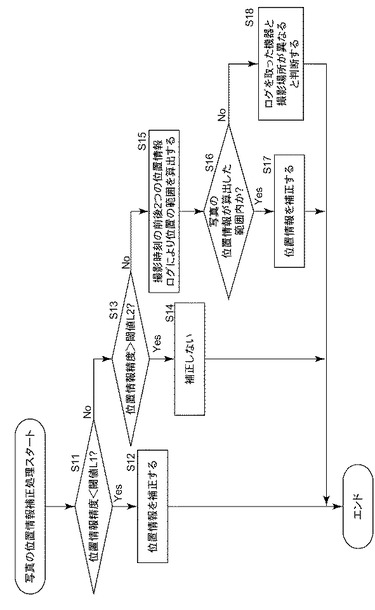
次に、図4のフローチャートを参照して、写真データに付加されている位置情報を補正する処理について説明する。
【0037】
ステップS11において、サーバー2の位置情報精度判定部44は、記憶部42に記憶されている写真データを読み出し、写真データに付加されている位置情報ログの精度が閾値L1より低いか否かを判定し、位置情報ログの精度が閾値L1より低いと判定した場合、ステップS12に進む。
【0038】
ステップS12において、サーバー2の位置情報補正部45は、ステップS11での位置情報精度判定部44による判定結果に基づいて、位置情報を補正する。補正方法は、図3の位置情報算出処理で説明したようにして算出した位置情報に変更することにより行われる。つまり、写真データに付加されている位置情報の取得時刻の前後の時刻の2つの位置情報ログが検索され、検索された2つの位置情報が示す場所を結ぶ直線上を直線移動したものとして、双方の時刻と写真データに付加されている位置情報の取得時刻の比により位置情報が算出され、算出された位置情報に変更(補正)される。
【0039】
ステップS11において、サーバー2の位置情報精度判定部44は、写真データに付加されている位置情報ログの精度が閾値L1より高いと判定した場合、ステップS13に進み、さらに、位置情報ログの精度が閾値L2より高いか否かを判定する。なお、閾値L1と閾値L2には、閾値L1<閾値L2の関係がある。
【0040】
ステップS13において、サーバー2の位置情報精度判定部44は、写真データに付加されている位置情報ログの精度が閾値L2より高いと判定した場合、ステップS14に進み、位置情報を補正しない(精度良好)と判断する。
【0041】
ステップS13において、サーバー2の位置情報精度判定部44は、写真データに付加されている位置情報ログの精度が閾値L2より低い、すなわち、位置情報ログの精度が閾値L1から閾値L2の間にあると判定した場合、ステップS15に進む。ステップS15において、サーバー2の位置情報補正部45は、ステップS13での位置情報精度判定部44による判定結果に基づいて、写真データの撮影時刻の前後の時刻の2つの位置情報ログを記憶部42から検索し、検索した2つの位置情報ログが示す位置およびその精度により位置の範囲を算出する。
【0042】
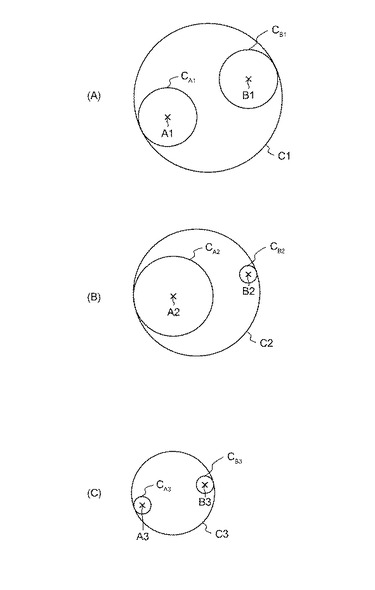
図5は、写真データの撮影時刻の前後2つの位置情報ログの精度により位置の範囲を算出する方法を説明する図である。
【0043】
図5(A)は、写真データの撮影時刻の前後2つの位置情報ログの精度が双方とも低い場合(たとえば、閾値L2より低い場合)の範囲について示した図である。図5(A)に示すように、位置A1を中心として特定距離(たとえば半径50m)の円CA1を描くとともに、位置B1を中心として特定距離(たとえば半径50m)の円CB1を描き、それらの円を含む円C1を位置の範囲とする。
【0044】
図5(B)は、写真データの撮影時刻の前後の時刻の2つの位置情報ログのうち、いずれか一方の精度が低く、他方が高い場合(たとえば、一方が閾値L2より低く、他方が閾値L2以上の場合)の範囲について示した図である。図5(B)に示すように、位置A2を中心として特定距離(たとえば半径50m)の円CA2を描くとともに、位置B2を中心として特定距離(たとえば半径5m)の円CB2を描き、それらの円を含む円C2を位置の範囲とする。
【0045】
図5(C)は、写真データの撮影時刻の前後の時刻の2つの位置情報ログの精度が双方とも高い場合(たとえば、閾値L2以上の場合)の範囲について示した図である。図5(C)に示すように、位置A3を中心として特定距離(たとえば半径5m)の円CA3を描くとともに、位置B3を中心として特定距離(たとえば半径5m)の円CB3を描き、それらの円を含む円C3を位置の範囲とする。
【0046】
図4の説明に戻る。ステップS16において、サーバー2の位置情報精度判定部44は、写真の位置情報がステップS15で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)であるか否かを判定し、範囲内であると判定した場合、ステップS17に進む。
【0047】
ステップS17において、サーバー2の位置情報補正部45は、ステップS16での位置情報精度判定部44による判定結果に基づいて、位置情報を補正する。補正方法は、図3の位置情報算出処理で説明したようにして算出した位置情報に変更することにより行われる。
【0048】
ステップS16において、サーバー2の位置情報精度判定部44は、写真の位置情報がステップS15で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)ではないと判定した場合、ステップS18に進む。ステップS18において、サーバー2の位置情報補正部45は、ステップS16での位置情報精度判定部44による判定結果に基づいて、ログを取った機器(携帯電話機1)と写真データの撮影場所が異なると判断し、携帯電話機1の位置情報ログに基づく補正は行わない。
【0049】
以上のように、写真データに付加されている位置情報を補正することが可能となる。
【0050】
[発明の第1の実施の形態における効果]
1.以上のように、写真データに位置情報が付加されていない場合には、携帯電話機1から取得した位置情報ログを元に位置情報を算出し、写真データに付加することが可能となる。
2.また、写真データに付加されている位置情報の精度に応じて位置の範囲を算出し、適宜補正を行うことができる。
【0051】
[本発明の第2の実施の形態]
次に、本発明の第2の実施の形態について説明する。
【0052】
第2の実施の形態においては、図6に示すような、位置情報補正システムで構成されている。この構成例では、上述した第1の実施の形態における携帯電話機1の機能と同等の機能を有するカーナビゲーション装置6が新たにネットワーク5に接続されている。カーナビゲーション装置6を搭載した車両は、携帯電話機1を携帯しているユーザーが乗用するものとする。
【0053】
第2の実施の形態では、携帯電話機1内の位置情報ログ取得部を「主位置情報ログ取得部11」とし、カーナビゲーション装置6内の位置情報ログ取得部を「補足位置情報ログ取得部61」とする。また、携帯電話機1の主位置情報ログ取得部11で取得される位置情報ログを「主位置情報ログ」と称し、カーナビゲーション装置6の補足位置情報ログ取得部61で取得される位置情報ログを「補足位置情報ログ」と称する。
【0054】
カーナビゲーション装置6は、車両に搭載されており、補足位置情報ログ取得部61により自車両の補足位置情報ログを取得し、送信部62により補足位置情報ログを、ネットワーク5を介してサーバー4に送信する。
【0055】
なお、補足位置情報ログを定期的に取ってサーバー4に送信することは必須ではなく、主位置情報ログの取得時刻と同期させる必要もない。したがって、カーナビゲーション装置6のような常時位置情報を取得する(位置情報を取得する間隔が短い)機器の場合、以下の変化点での位置情報を補足位置情報として取得し、サーバー4に送信する。
(1)電源オン時または電源オフ時
(2)速度が0km/hから変化した時(例えば、0km/hの状態が一定期間続いた後で0km/h以上になった際の最初のデータ)
(3)速度が0km/hになった時(例えば、1km/h以下の状態が一定期間続いた後で0km/hになった際の最初のデータ)
(4)精度が低くなった時(例えば、精度が所定の閾値より高い状態が一定期間続いた後でその閾値より低くなった最初のデータ)
(5)精度が高くなった時(例えば、精度が所定の閾値より低い状態が一定期間続いた後でその閾値より高くなった際の最初のデータ)
【0056】
上記の一定期間とは、たとえば5分程度でよい。このような変化点での位置情報を補足位置情報として取得することで、単なる信号待ちやトンネル等の情報を省略することができる。
【0057】
サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた主位置情報ログとカーナビゲーション装置6から送信されてきた補足位置情報ログを受信し、記憶部42に記憶させる。
【0058】
図7は、サーバー4の記憶部42に記憶される情報のデータ構造例を示す図である。
【0059】
図7に示すように、携帯電話機1から受信した主位置情報ログ、および、カーナビゲーション装置6から受信した補足位置情報ログが時系列で記憶されているとともに、デジタルカメラ2で撮影された写真データの撮影時刻および携帯電話機1で撮影された写真データの撮影時刻が時系列で記憶されている。なお、図7には、緯度や経度などは示されていないが、記憶部42内には記憶されており、位置情報ログに関連付けられている。また、写真データの撮影時刻に、写真データの実体が関連付けられている。
【0060】
図7の例では、主位置情報ログおよび補足位置情報ログには、携帯電話機1またはカーナビゲーション装置6が位置情報を取得した時刻(取得時刻)、測位の精度(高、中、低)、速度(km/h)が示されている。また、位置情報が付加されている写真データの撮影時刻には、その位置情報ログが示され、位置情報が付加されていない写真データの撮影時刻には、単に撮影時刻とデジタルカメラ2の名称(デジカメ)が示されている。
【0061】
位置情報精度判定部44は、記憶部42に記憶されている補足位置情報ログを読み出し、補足位置情報ログの精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44の判定結果から、精度の良い補足位置情報ログのみを主位置情報ログに追加する。
【0062】
つまり、この構成例では、サーバー4が、携帯電話機1から取得した主位置情報ログに、カーナビゲーション装置6から取得した精度の良い補足位置情報ログを追加して統合することにより、主位置情報ログの精度を向上させることを目的とする点に特徴がある。
【0063】
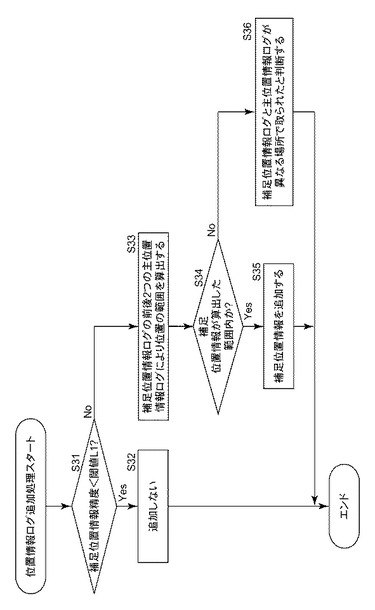
次に、図8のフローチャートを参照して、補足位置情報ログを主位置情報ログに追加する処理について説明する。
【0064】
ステップS31において、サーバー2の位置情報精度判定部44は、記憶部42に記憶されている補足位置情報ログを読み出し、その精度が閾値L1より低いか否かを判定し、補足位置情報ログの精度が閾値L1より低いと判定した場合、ステップS32に進む。ステップS32において、サーバー2の位置情報補正部45は、補足位置情報を追加しない(精度不良)と判断する。
【0065】
ステップS31において、サーバー2の位置情報精度判定部44は、補足位置情報ログの精度が閾値L1より高いと判定した場合、ステップS33に進み、補足位置情報ログの取得時刻の前後の時刻の2つの主位置情報ログを記憶部42から検索し、検索した2つの主位置情報ログにより位置の範囲を算出する。位置の範囲の算出方法は、図5を用いて説明したようにして算出される。
【0066】
ステップS34において、サーバーの位置情報精度判定部44は、補足位置情報がステップS33で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)であるか否かを判定し、範囲内であると判定した場合、ステップS35に進む。ステップS35において、サーバー2の位置情報補正部45は、ステップS34での位置情報精度判定部44による判定結果(精度良好)に基づいて、補足位置情報ログを主位置情報ログに追加する。すなわち携帯電話機1を携帯しているユーザーがカーナビゲーション装置6を搭載した車両内におり、携帯電話機1と、カーナビゲーション装置6が離れていないとして、補足位置情報ログが主位置情報ログに追加され補完される。
【0067】
ステップS34において、サーバー2の位置情報精度判定部44は、補足位置情報がステップS33で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)ではないと判定した場合、ステップS36に進む。ステップS36において、サーバー2の位置情報補正部45は、ステップS34での位置情報精度判定部44による判定結果に基づいて、補足位置情報ログと主位置情報ログが異なる場所で取られたと判断し、追加しない。たとえば、携帯電話機1を携帯しているユーザーがカーナビゲーション装置6を搭載した車両から離れるなどして、携帯電話機1の位置と、車両(カーナビゲーション装置6)が異なる位置にあるときの位置情報であるとして、その補足位置情報ログは主位置情報ログに追加されない。
【0068】
図9は、主位置情報ログに補足位置情報ログが追加された場合のデータ構造例を示す図である。
【0069】
図9に示すように、携帯電話機1から受信した主位置情報ログとカーナビゲーション装置6から受信した補足位置情報ログが統合されて記憶されているともに、デジタルカメラ2で撮影された写真データの撮影時刻および携帯電話機1で撮影された写真データの撮影時刻が時系列で記憶されている。
【0070】
なお、主位置情報ログに補足位置情報ログが追加され、それらが統合されると、近い時刻の位置情報が複数存在する場合がある。そのような場合には、精度の高い方のみを残し、精度の低い方を消去することにより、位置情報ログの精度を向上させることができる。具体的には、追加された補足位置情報ログの近接する時刻の位置情報との時間間隔が特定の時間(たとえば1分)以内であれば、双方の精度を比較して、精度の低い方を削除する。このような処理を、追加された補足位置情報ログについて順次処理する。
【0071】
以上のように、主位置情報ログに精度の良い補足位置情報ログを追加することで、主位置情報ログを補正することが可能となる。そして、補正された主位置情報ログを用いて、写真データに付加されている位置情報を補正したり、位置情報が付加されていない写真データに位置情報を付加することができる。
【0072】
なお、以上においては、精度の良い補足位置情報ログのみを主位置情報ログに追加するようにしたが、これに限らず、全ての補足ログ位置情報を主位置情報ログに順次追加するようにしてもよい。
【0073】
また、カーナビゲーション装置6で補足位置情報ログを取るようにしたが、GPS受信機を搭載した機器であれば何でもよく、複数の機器で補足位置情報ログを取り、主位置情報ログに順次追加したり、あるいは、精度の良い補足位置情報ログのみを主位置情報ログに追加したりするようにしてもよい。複数の機器で取得した補足位置情報ログが重複した場合、つまり、同時刻や近い時刻の補足位置情報ログについて位置情報が近傍であれば、精度の高い方のみを追加するようにすればよい。
【0074】
[発明の第2の実施の形態における効果]
1.以上のように、携帯電話機1で取得した主位置情報ログに、カーナビゲーション装置6で取得した精度の良い補足位置情報ログを追加することで、主位置情報ログの精度を向上させることができる。つまり、携帯電話機1は、カバン等に入れていたりして、GPS機能を十分に発揮できない場合があるが、カーナビゲーション装置6は、電源オン時にGPSの情報を正確に記録することができるため、車両の発進、停止、屋内外への移動などの情報が正確に取得可能であり、変化点を補うものとして利用することができる。すなわちこのように、携帯電話機1で取得した主位置情報ログに基づいて、図3で示したような位置情報を算出したり、図4に示したような位置情報の補正を行う場合、このように主位置情報ログの精度を向上させることができれば、より正確な位置情報を得ることができる。
2.また以上においては、携帯電話機1で取得した位置情報を主位置情報ログとし、その位置情報の精度よりも高いカーナビゲーション装置6から取得した位置情報を補足位置情報ログとしたが、それに限定するものではなく、ユーザーが所在する位置にある機器(すなわち、ユーザーに伴って移動する機器)が取得する位置情報であればよい。そして、たとえば、位置情報の算出処理(図3)、位置情報の補正処理(図4)に用いる位置情報のログを、主位置情報ログとし、その主位置情報ログの位置精度よりも高い位置精度の位置情報を補足位置情報として、主位置情報ログを補完することで、より正確に位置情報の算出、補正(図3,4)を行うことができる。
3.また、カーナビゲーション装置6は複数ユーザーで共有する場合があり、同時に移動していた場合には、双方のユーザーの携帯電話機1で測位された主位置情報ログに、カーナビゲーション装置6で測位された補足位置情報ログをそれぞれ追加することも可能である。一方、ユーザーが別行動していた場合には、カーナビゲーション装置6の近傍にいるユーザーの携帯電話機1で取られた主位置情報ログにのみ追加することができる。
【0075】
[変形例]
1.駅の改札や店舗、あるいは社内等に設置される端末にその場所を特定する位置情報を予め登録しておき、ユーザーがSuica(登録商標)やFelica(登録商標)をかざすことにより、端末が、ユーザーの場所を示す情報として、登録されている位置情報をサーバー4に送信するようにしてもよい。これにより、携帯電話機1で取られた位置情報ログよりも精度のよい位置情報ログを取得することができる。
【0076】
2.以上においては、予定表に登録されているイベントの開始時刻と終了時刻の間に撮影された写真データとを関連付けて、行動記録や旅行記等に利用することが可能となる。また予定表に登録されているイベントの開始時刻と終了時刻に位置情報ログを関連付けて、行動履歴マッピング等にも利用することが可能となる。さらに第1の実施の形態と同様に、写真データに位置情報を付加し、その写真データと予定表を関連付けることも勿論可能である。
【0077】
なお、予めイベントに1つ、あるいは、複数の位置情報を付加しておくことにより、変形例1と同様に、位置情報の補正に使用することができる情報を用意することが出来る。イベントに複数の位置情報を付加する場合には、携帯電話機1で取られた位置情報を、いずれかの位置に近い方に限って補正に利用することが可能となる。
【0078】
イベントには、テーマパークの予定のように、時間、位置共に広い範囲のイベントとなる場合がある。この場合は、テーマパーク内の移動を図示したり、そこで撮影した写真に施設の名称を補足情報として付加したり、イベント内の子イベントとして自動的にイベントを生成することが出来る。
【0079】
また、複数の位置情報と場所の名称を対にしたリストをイベントに登録しておくことで、携帯電話機1で取られた位置情報を、いずれかの位置の近い方に限って補正に利用することが可能となる。
【0080】
さらに、テーマパークのホームページなどに上記の位置情報のリストを登録しておき、イベントとの関連付けをすることによって、位置情報を簡単に利用者に提供することが出来る。
【0081】
上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピューターなどに、プログラム記録媒体からインストールされる。
【0082】
この発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化したり、上記実施の形態に開示されている複数の構成要素を適宜組み合わせたりすることにより種々の発明を形成できる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施の形態に亘る構成要素を適宜組み合わせても良い。
【符号の説明】
【0083】
1 携帯電話機
2 デジタルカメラ
4 サーバー
5 ネットワーク
11 位置情報ログ取得部
42 記憶部
43 位置情報追加部
44 位置情報精度判定部
45 位置情報補正部
【技術分野】
【0001】
本発明は、位置情報補正システムに関し、特に、GPSで測位した位置情報を補正することができるようにした位置情報補正システムに関する。
【背景技術】
【0002】
近年、自装置の位置を測位するために、携帯端末装置にGPS(Global Positioning System)が搭載されるようになってきた。例えば、特許文献1には、携帯端末装置が受信したGPS衛星信号を位置情報提供サーバーに送信し、位置情報提供サーバーで、携帯端末装置から送られたGPS衛星信号に基づいて携帯端末装置の位置を算出し、当該位置をマッピングしてなるマッピング位置情報を携帯端末装置に配信する技術が提案されている。
【0003】
また、携帯電話機においては、デジタルカメラ付きのものが主流となっており、撮影した写真にGPS位置情報を付加することも技術的には可能である。そこで、写真とGPS位置情報を関連付けて、行動記録や旅の旅行記等に利用したりすることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−64460号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、携帯電話機におけるGPSでの測位は、約10m程度の誤差を含んでおり、屋内などでは、位置情報の精度が低くなってしまう課題があった。
【0006】
本発明の目的は、GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供することである。
【課題を解決するための手段】
【0007】
本発明の一側面は、ユーザーの位置に対応する位置にある機器の位置を示す位置情報を取得する位置情報取得手段と、位置情報を記憶する記憶手段と、記憶手段に記憶されている位置情報の精度が低い場合、位置情報の取得時刻の前後の時刻の2つの位置情報に基づいて、位置情報を補正する位置情報補正手段とを備えることを特徴とする。
【0008】
以上のように、携帯電話機で測位された位置情報を、位置情報の取得時刻の前後の時刻の2つの位置情報に基づいて補正することにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【0009】
位置情報補正手段は、機器が位置情報が示す位置にあるときの時刻の前後の時刻の2つの位置情報を記憶手段から検索し、検索した2つの位置情報が示す位置を結ぶ直線上の、双方の取得時刻と位置情報の取得時刻の比により算出した位置を示す位置情報で補正する。これにより、容易に位置情報を補正することが可能となる。
【0010】
位置情報補正手段は、検索した2つの位置情報の精度とその位置情報が示す位置により特定される範囲に、補正対象となる位置情報が示す位置が存在する場合に、位置情報を補正する。これにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【0011】
記憶手段は、写真データをさらに記憶し、写真データの撮影時刻の前後の時刻の2つの位置情報を記憶手段から検索し、検索した2つの位置情報の直線上の、双方の取得時刻と写真データの撮影時刻の比により算出した位置を示す位置情報を写真データに付加する位置情報追加手段をさらに備える。これにより、写真データに位置情報が付加されていない場合にも、携帯電話機から取得した位置情報を写真データに付加することが可能となる。
【0012】
本発明の一側面は、ユーザーの位置に対応する位置にある第1の機器の位置が示す第1の位置情報を取得する第1の位置情報取得手段と、ユーザーの位置に対応する位置にある第2の機器の位置が示す第2の位置情報であって、その情報が示す位置精度は、第1の位置情報が示す位置精度よりも高い第2の位置情報を取得する第2の位置情報取得手段と、第1の位置情報および第2の位置情報を、機器毎に記憶する記憶手段と、第2の位置情報を追加して第1の位置情報を補完統合する位置情報追加手段とを備えることを特徴とする。
【0013】
以上のように、携帯電話機で測位された位置情報に、カーナビゲーション装置で測位された位置情報を追加することにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【0014】
位置情報追加手段は、第2の位置情報が示す位置の時刻の前後の時刻の2つの第1の位置情報を記憶手段から検索し、検索した2つの第1の位置情報の精度により位置の範囲を算出し、第2の位置情報が位置の範囲内である場合に、第2の位置情報を第1の位置情報に追加して統合する。これにより、携帯電話機の位置情報の精度を向上させることが可能となる。
【発明の効果】
【0015】
本発明によれば、GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供することができる。
【図面の簡単な説明】
【0016】
【図1】第1の実施の形態における位置情報補正システムの構成例を示す図である。
【図2】記憶部に記憶される情報のデータ構造例を示す図である。
【図3】写真の位置情報を算出する処理を説明するフローチャートである。
【図4】写真の位置情報を補正する処理を説明するフローチャートである。
【図5】写真データの撮影時刻の前後2つの位置情報ログの精度により位置の範囲を算出する方法を説明する図である。
【図6】第2の実施の形態における位置情報補正システムの構成例を示す図である。
【図7】記憶部に記憶される情報のデータ構造例を示す図である。
【図8】補足位置情報ログを主位置情報ログに追加する処理を説明するフローチャートである。
【図9】主位置情報ログに補足位置情報ログが追加された場合のデータ構造例を示す図である。
【発明を実施するための形態】
【0017】
[本発明の第1の実施の形態]
図1は、本発明の第1の実施の形態における位置情報補正システムの構成例を示す図である。この位置情報補正システムにおいては、携帯電話機1、デジタルカメラ2、パーソナルコンピューター3、サーバー4がネットワーク5を介して相互に接続されることで構成される。携帯電話機1とデジタルカメラ2は、1人のユーザーが携帯しているものとする。
【0018】
携帯電話機1は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、メモリー、入力部、表示画面、および位置情報を検出するためのGPS(Global Positioning System)受信機などを実装しており、少なくとも、位置情報ログ取得部11および送信部12の機能を有する。
【0019】
位置情報ログ取得部11は、GPS受信機を用いて位置情報を所定時間(たとえば15分)毎にログとして取得(測位)する。位置情報には、緯度、経度、GPS受信機の状態(測定中/停止中)、測位の信頼性および精度、速度、進行方向、GPSの時刻(原子時計)等が含まれる。送信部12は、通信制御装置、通信ポート等を有し、携帯電話機1とネットワーク5間の通信を媒介する通信インターフェースであり、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。また送信部12は、携帯電話機1のカメラ機能を用いて撮影された写真データを、位置情報ログ取得部11で取得された位置情報ログとともに、ネットワーク5を介してサーバー4に送信する。
【0020】
なお、携帯電話機1の電源がオフされていたり、GPS情報を取得することができない場合もあり、その場合には、送信間隔が空くものとする。また位置情報の精度が特定の閾値より低い場合やGPS受信機の状態が停止中の場合には、位置情報の信頼性が低いと判断し、サーバー4に送信しないようにしても良い。さらに通信費削減を目的として、携帯電話機1側で位置情報ログを所定量保存しておき、送信可能な時にまとめてサーバー4に送信するようにしてもよい。
【0021】
デジタルカメラ2は、CPU、CMOS(Complementary Metal Oxide Semiconductor)センサー、画像処理部、メモリー、出力部、操作部、表示部等を有する撮影装置である。デジタルカメラ2は、たとえばパーソナルコンピューター3とUSB(Universal Serial Bus)接続することができる。デジタルカメラ2で撮影された写真(画像)データは、パーソナルコンピューター3上のアプリケーションにより、ネットワーク5を介してサーバー4に送信される。
【0022】
パーソナルコンピューター3は、CPU、ROM、RAM、HDD(Hard Disk Drive)、入力部、表示部等を有するコンピューターシステムであり、たとえばUSB接続されたデジタルカメラ2から写真データを入手し、ネットワーク5を介してサーバー4に送信する。
【0023】
サーバー4は、CPU、ROM、RAM、およびHDDなどを有するコンピューターシステムであり、少なくとも、受信部41、記憶部42、位置情報追加部43、位置情報精度判定部44、および位置情報補正部45の機能を有する。
【0024】
受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させるとともに、ネットワーク5を介してパーソナルコンピューター3から送信されてきたデジタルカメラ2の写真データを受信し、記憶部42に記憶させる。また受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた、位置情報が付加された写真データを受信し、記憶部42に記憶させる。
【0025】
記憶部42は、携帯電話機1から受信した位置情報ログや位置情報ログが付加された写真データ、および、デジタルカメラ2で撮影された写真データを記憶する。
【0026】
図2は、記憶部42に記憶される情報のデータ構造例を示す図である。
【0027】
図2に示すように、携帯電話機1から受信した位置情報ログが時系列で記憶されているとともに、デジタルカメラ2で撮影された写真データの撮影時刻および携帯電話機1で撮影された写真データの撮影時刻が時系列で記憶されている。なお、図2には、緯度や経度などは示されていないが、記憶部42内には記憶されており、位置情報ログに関連付けられている。また、写真データの撮影時刻に、写真データの実体が関連付けられている。
【0028】
図2の例では、位置情報ログには、携帯電話機1が位置情報を取得した時刻(以下、取得時刻と称する)、すなわち位置情報が示す位置に携帯電話機1が存在するときの時刻、測位の精度(高、中、低)、速度(km/h)が示されている。また、位置情報が付加されている写真データの撮影時刻には、その位置情報ログが示され、位置情報が付加されていない写真データの撮影時刻には、単に撮影時刻とデジタルカメラ2の名称(デジカメ)が示されている。
【0029】
なお、記憶部42に記憶される位置情報ログのうち、位置変化の少ないデータを削除して記憶容量を確保するようにしても良い。あるいは、携帯電話機1側で、位置変化の少ないデータを予め送信しないようにしても良い。
【0030】
図1の説明に戻る。位置情報追加部43は、記憶部42に記憶されている写真データのうち、位置情報が付加されていない写真データに対し、写真データの撮影時刻から検索した位置情報ログを追加する。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果に基づいて、位置情報ログを補正する。
【0031】
次に、図3のフローチャートを参照して、写真の位置情報を算出する処理について説明する。
【0032】
ステップS1において、サーバー2の位置情報追加部43は、記憶部42に記憶されている写真データのうち、位置情報が付加されていない写真データを読み出し、その写真データの撮影時刻の前後の時刻の2つの位置情報ログを記憶部42から検索する。
【0033】
たとえば、図2において、「2:10:25 デジカメ」の撮影時刻を有する写真データには、位置情報が付加されておらず、この写真データの撮影時刻の前後の時刻の2つの位置情報ログを検索する場合、「5:09:00 精度−低 速度−0km/h」と「6:11:45 精度−低 速度−0km/h」が検索される。
【0034】
ステップS2において、位置情報追加部43は、ステップS1で検索した2つの位置情報が示す場所(地点)を結ぶ直線上を直線移動したものとして、双方の取得時刻と写真データの撮影時刻の比により写真データの撮影時刻に対応する位置情報を算出する。ステップS3において、位置情報追加部43は、ステップS2で算出した位置情報を写真データに付加する。
【0035】
以上のように、写真データに位置情報が付加されていない場合には、携帯電話機1から取得した位置情報ログを元に位置情報を算出し、写真データに付加することが可能となる。また、写真データに位置情報ログが付加されていたとしても、その位置情報ログの精度が低い場合には、位置情報が付加されていないものとして、上述したようにして位置情報を付加(変更)することもできる。
【0036】
次に、図4のフローチャートを参照して、写真データに付加されている位置情報を補正する処理について説明する。
【0037】
ステップS11において、サーバー2の位置情報精度判定部44は、記憶部42に記憶されている写真データを読み出し、写真データに付加されている位置情報ログの精度が閾値L1より低いか否かを判定し、位置情報ログの精度が閾値L1より低いと判定した場合、ステップS12に進む。
【0038】
ステップS12において、サーバー2の位置情報補正部45は、ステップS11での位置情報精度判定部44による判定結果に基づいて、位置情報を補正する。補正方法は、図3の位置情報算出処理で説明したようにして算出した位置情報に変更することにより行われる。つまり、写真データに付加されている位置情報の取得時刻の前後の時刻の2つの位置情報ログが検索され、検索された2つの位置情報が示す場所を結ぶ直線上を直線移動したものとして、双方の時刻と写真データに付加されている位置情報の取得時刻の比により位置情報が算出され、算出された位置情報に変更(補正)される。
【0039】
ステップS11において、サーバー2の位置情報精度判定部44は、写真データに付加されている位置情報ログの精度が閾値L1より高いと判定した場合、ステップS13に進み、さらに、位置情報ログの精度が閾値L2より高いか否かを判定する。なお、閾値L1と閾値L2には、閾値L1<閾値L2の関係がある。
【0040】
ステップS13において、サーバー2の位置情報精度判定部44は、写真データに付加されている位置情報ログの精度が閾値L2より高いと判定した場合、ステップS14に進み、位置情報を補正しない(精度良好)と判断する。
【0041】
ステップS13において、サーバー2の位置情報精度判定部44は、写真データに付加されている位置情報ログの精度が閾値L2より低い、すなわち、位置情報ログの精度が閾値L1から閾値L2の間にあると判定した場合、ステップS15に進む。ステップS15において、サーバー2の位置情報補正部45は、ステップS13での位置情報精度判定部44による判定結果に基づいて、写真データの撮影時刻の前後の時刻の2つの位置情報ログを記憶部42から検索し、検索した2つの位置情報ログが示す位置およびその精度により位置の範囲を算出する。
【0042】
図5は、写真データの撮影時刻の前後2つの位置情報ログの精度により位置の範囲を算出する方法を説明する図である。
【0043】
図5(A)は、写真データの撮影時刻の前後2つの位置情報ログの精度が双方とも低い場合(たとえば、閾値L2より低い場合)の範囲について示した図である。図5(A)に示すように、位置A1を中心として特定距離(たとえば半径50m)の円CA1を描くとともに、位置B1を中心として特定距離(たとえば半径50m)の円CB1を描き、それらの円を含む円C1を位置の範囲とする。
【0044】
図5(B)は、写真データの撮影時刻の前後の時刻の2つの位置情報ログのうち、いずれか一方の精度が低く、他方が高い場合(たとえば、一方が閾値L2より低く、他方が閾値L2以上の場合)の範囲について示した図である。図5(B)に示すように、位置A2を中心として特定距離(たとえば半径50m)の円CA2を描くとともに、位置B2を中心として特定距離(たとえば半径5m)の円CB2を描き、それらの円を含む円C2を位置の範囲とする。
【0045】
図5(C)は、写真データの撮影時刻の前後の時刻の2つの位置情報ログの精度が双方とも高い場合(たとえば、閾値L2以上の場合)の範囲について示した図である。図5(C)に示すように、位置A3を中心として特定距離(たとえば半径5m)の円CA3を描くとともに、位置B3を中心として特定距離(たとえば半径5m)の円CB3を描き、それらの円を含む円C3を位置の範囲とする。
【0046】
図4の説明に戻る。ステップS16において、サーバー2の位置情報精度判定部44は、写真の位置情報がステップS15で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)であるか否かを判定し、範囲内であると判定した場合、ステップS17に進む。
【0047】
ステップS17において、サーバー2の位置情報補正部45は、ステップS16での位置情報精度判定部44による判定結果に基づいて、位置情報を補正する。補正方法は、図3の位置情報算出処理で説明したようにして算出した位置情報に変更することにより行われる。
【0048】
ステップS16において、サーバー2の位置情報精度判定部44は、写真の位置情報がステップS15で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)ではないと判定した場合、ステップS18に進む。ステップS18において、サーバー2の位置情報補正部45は、ステップS16での位置情報精度判定部44による判定結果に基づいて、ログを取った機器(携帯電話機1)と写真データの撮影場所が異なると判断し、携帯電話機1の位置情報ログに基づく補正は行わない。
【0049】
以上のように、写真データに付加されている位置情報を補正することが可能となる。
【0050】
[発明の第1の実施の形態における効果]
1.以上のように、写真データに位置情報が付加されていない場合には、携帯電話機1から取得した位置情報ログを元に位置情報を算出し、写真データに付加することが可能となる。
2.また、写真データに付加されている位置情報の精度に応じて位置の範囲を算出し、適宜補正を行うことができる。
【0051】
[本発明の第2の実施の形態]
次に、本発明の第2の実施の形態について説明する。
【0052】
第2の実施の形態においては、図6に示すような、位置情報補正システムで構成されている。この構成例では、上述した第1の実施の形態における携帯電話機1の機能と同等の機能を有するカーナビゲーション装置6が新たにネットワーク5に接続されている。カーナビゲーション装置6を搭載した車両は、携帯電話機1を携帯しているユーザーが乗用するものとする。
【0053】
第2の実施の形態では、携帯電話機1内の位置情報ログ取得部を「主位置情報ログ取得部11」とし、カーナビゲーション装置6内の位置情報ログ取得部を「補足位置情報ログ取得部61」とする。また、携帯電話機1の主位置情報ログ取得部11で取得される位置情報ログを「主位置情報ログ」と称し、カーナビゲーション装置6の補足位置情報ログ取得部61で取得される位置情報ログを「補足位置情報ログ」と称する。
【0054】
カーナビゲーション装置6は、車両に搭載されており、補足位置情報ログ取得部61により自車両の補足位置情報ログを取得し、送信部62により補足位置情報ログを、ネットワーク5を介してサーバー4に送信する。
【0055】
なお、補足位置情報ログを定期的に取ってサーバー4に送信することは必須ではなく、主位置情報ログの取得時刻と同期させる必要もない。したがって、カーナビゲーション装置6のような常時位置情報を取得する(位置情報を取得する間隔が短い)機器の場合、以下の変化点での位置情報を補足位置情報として取得し、サーバー4に送信する。
(1)電源オン時または電源オフ時
(2)速度が0km/hから変化した時(例えば、0km/hの状態が一定期間続いた後で0km/h以上になった際の最初のデータ)
(3)速度が0km/hになった時(例えば、1km/h以下の状態が一定期間続いた後で0km/hになった際の最初のデータ)
(4)精度が低くなった時(例えば、精度が所定の閾値より高い状態が一定期間続いた後でその閾値より低くなった最初のデータ)
(5)精度が高くなった時(例えば、精度が所定の閾値より低い状態が一定期間続いた後でその閾値より高くなった際の最初のデータ)
【0056】
上記の一定期間とは、たとえば5分程度でよい。このような変化点での位置情報を補足位置情報として取得することで、単なる信号待ちやトンネル等の情報を省略することができる。
【0057】
サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた主位置情報ログとカーナビゲーション装置6から送信されてきた補足位置情報ログを受信し、記憶部42に記憶させる。
【0058】
図7は、サーバー4の記憶部42に記憶される情報のデータ構造例を示す図である。
【0059】
図7に示すように、携帯電話機1から受信した主位置情報ログ、および、カーナビゲーション装置6から受信した補足位置情報ログが時系列で記憶されているとともに、デジタルカメラ2で撮影された写真データの撮影時刻および携帯電話機1で撮影された写真データの撮影時刻が時系列で記憶されている。なお、図7には、緯度や経度などは示されていないが、記憶部42内には記憶されており、位置情報ログに関連付けられている。また、写真データの撮影時刻に、写真データの実体が関連付けられている。
【0060】
図7の例では、主位置情報ログおよび補足位置情報ログには、携帯電話機1またはカーナビゲーション装置6が位置情報を取得した時刻(取得時刻)、測位の精度(高、中、低)、速度(km/h)が示されている。また、位置情報が付加されている写真データの撮影時刻には、その位置情報ログが示され、位置情報が付加されていない写真データの撮影時刻には、単に撮影時刻とデジタルカメラ2の名称(デジカメ)が示されている。
【0061】
位置情報精度判定部44は、記憶部42に記憶されている補足位置情報ログを読み出し、補足位置情報ログの精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44の判定結果から、精度の良い補足位置情報ログのみを主位置情報ログに追加する。
【0062】
つまり、この構成例では、サーバー4が、携帯電話機1から取得した主位置情報ログに、カーナビゲーション装置6から取得した精度の良い補足位置情報ログを追加して統合することにより、主位置情報ログの精度を向上させることを目的とする点に特徴がある。
【0063】
次に、図8のフローチャートを参照して、補足位置情報ログを主位置情報ログに追加する処理について説明する。
【0064】
ステップS31において、サーバー2の位置情報精度判定部44は、記憶部42に記憶されている補足位置情報ログを読み出し、その精度が閾値L1より低いか否かを判定し、補足位置情報ログの精度が閾値L1より低いと判定した場合、ステップS32に進む。ステップS32において、サーバー2の位置情報補正部45は、補足位置情報を追加しない(精度不良)と判断する。
【0065】
ステップS31において、サーバー2の位置情報精度判定部44は、補足位置情報ログの精度が閾値L1より高いと判定した場合、ステップS33に進み、補足位置情報ログの取得時刻の前後の時刻の2つの主位置情報ログを記憶部42から検索し、検索した2つの主位置情報ログにより位置の範囲を算出する。位置の範囲の算出方法は、図5を用いて説明したようにして算出される。
【0066】
ステップS34において、サーバーの位置情報精度判定部44は、補足位置情報がステップS33で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)であるか否かを判定し、範囲内であると判定した場合、ステップS35に進む。ステップS35において、サーバー2の位置情報補正部45は、ステップS34での位置情報精度判定部44による判定結果(精度良好)に基づいて、補足位置情報ログを主位置情報ログに追加する。すなわち携帯電話機1を携帯しているユーザーがカーナビゲーション装置6を搭載した車両内におり、携帯電話機1と、カーナビゲーション装置6が離れていないとして、補足位置情報ログが主位置情報ログに追加され補完される。
【0067】
ステップS34において、サーバー2の位置情報精度判定部44は、補足位置情報がステップS33で算出した位置の範囲内(図5(A)〜図5(C)で示した範囲内)ではないと判定した場合、ステップS36に進む。ステップS36において、サーバー2の位置情報補正部45は、ステップS34での位置情報精度判定部44による判定結果に基づいて、補足位置情報ログと主位置情報ログが異なる場所で取られたと判断し、追加しない。たとえば、携帯電話機1を携帯しているユーザーがカーナビゲーション装置6を搭載した車両から離れるなどして、携帯電話機1の位置と、車両(カーナビゲーション装置6)が異なる位置にあるときの位置情報であるとして、その補足位置情報ログは主位置情報ログに追加されない。
【0068】
図9は、主位置情報ログに補足位置情報ログが追加された場合のデータ構造例を示す図である。
【0069】
図9に示すように、携帯電話機1から受信した主位置情報ログとカーナビゲーション装置6から受信した補足位置情報ログが統合されて記憶されているともに、デジタルカメラ2で撮影された写真データの撮影時刻および携帯電話機1で撮影された写真データの撮影時刻が時系列で記憶されている。
【0070】
なお、主位置情報ログに補足位置情報ログが追加され、それらが統合されると、近い時刻の位置情報が複数存在する場合がある。そのような場合には、精度の高い方のみを残し、精度の低い方を消去することにより、位置情報ログの精度を向上させることができる。具体的には、追加された補足位置情報ログの近接する時刻の位置情報との時間間隔が特定の時間(たとえば1分)以内であれば、双方の精度を比較して、精度の低い方を削除する。このような処理を、追加された補足位置情報ログについて順次処理する。
【0071】
以上のように、主位置情報ログに精度の良い補足位置情報ログを追加することで、主位置情報ログを補正することが可能となる。そして、補正された主位置情報ログを用いて、写真データに付加されている位置情報を補正したり、位置情報が付加されていない写真データに位置情報を付加することができる。
【0072】
なお、以上においては、精度の良い補足位置情報ログのみを主位置情報ログに追加するようにしたが、これに限らず、全ての補足ログ位置情報を主位置情報ログに順次追加するようにしてもよい。
【0073】
また、カーナビゲーション装置6で補足位置情報ログを取るようにしたが、GPS受信機を搭載した機器であれば何でもよく、複数の機器で補足位置情報ログを取り、主位置情報ログに順次追加したり、あるいは、精度の良い補足位置情報ログのみを主位置情報ログに追加したりするようにしてもよい。複数の機器で取得した補足位置情報ログが重複した場合、つまり、同時刻や近い時刻の補足位置情報ログについて位置情報が近傍であれば、精度の高い方のみを追加するようにすればよい。
【0074】
[発明の第2の実施の形態における効果]
1.以上のように、携帯電話機1で取得した主位置情報ログに、カーナビゲーション装置6で取得した精度の良い補足位置情報ログを追加することで、主位置情報ログの精度を向上させることができる。つまり、携帯電話機1は、カバン等に入れていたりして、GPS機能を十分に発揮できない場合があるが、カーナビゲーション装置6は、電源オン時にGPSの情報を正確に記録することができるため、車両の発進、停止、屋内外への移動などの情報が正確に取得可能であり、変化点を補うものとして利用することができる。すなわちこのように、携帯電話機1で取得した主位置情報ログに基づいて、図3で示したような位置情報を算出したり、図4に示したような位置情報の補正を行う場合、このように主位置情報ログの精度を向上させることができれば、より正確な位置情報を得ることができる。
2.また以上においては、携帯電話機1で取得した位置情報を主位置情報ログとし、その位置情報の精度よりも高いカーナビゲーション装置6から取得した位置情報を補足位置情報ログとしたが、それに限定するものではなく、ユーザーが所在する位置にある機器(すなわち、ユーザーに伴って移動する機器)が取得する位置情報であればよい。そして、たとえば、位置情報の算出処理(図3)、位置情報の補正処理(図4)に用いる位置情報のログを、主位置情報ログとし、その主位置情報ログの位置精度よりも高い位置精度の位置情報を補足位置情報として、主位置情報ログを補完することで、より正確に位置情報の算出、補正(図3,4)を行うことができる。
3.また、カーナビゲーション装置6は複数ユーザーで共有する場合があり、同時に移動していた場合には、双方のユーザーの携帯電話機1で測位された主位置情報ログに、カーナビゲーション装置6で測位された補足位置情報ログをそれぞれ追加することも可能である。一方、ユーザーが別行動していた場合には、カーナビゲーション装置6の近傍にいるユーザーの携帯電話機1で取られた主位置情報ログにのみ追加することができる。
【0075】
[変形例]
1.駅の改札や店舗、あるいは社内等に設置される端末にその場所を特定する位置情報を予め登録しておき、ユーザーがSuica(登録商標)やFelica(登録商標)をかざすことにより、端末が、ユーザーの場所を示す情報として、登録されている位置情報をサーバー4に送信するようにしてもよい。これにより、携帯電話機1で取られた位置情報ログよりも精度のよい位置情報ログを取得することができる。
【0076】
2.以上においては、予定表に登録されているイベントの開始時刻と終了時刻の間に撮影された写真データとを関連付けて、行動記録や旅行記等に利用することが可能となる。また予定表に登録されているイベントの開始時刻と終了時刻に位置情報ログを関連付けて、行動履歴マッピング等にも利用することが可能となる。さらに第1の実施の形態と同様に、写真データに位置情報を付加し、その写真データと予定表を関連付けることも勿論可能である。
【0077】
なお、予めイベントに1つ、あるいは、複数の位置情報を付加しておくことにより、変形例1と同様に、位置情報の補正に使用することができる情報を用意することが出来る。イベントに複数の位置情報を付加する場合には、携帯電話機1で取られた位置情報を、いずれかの位置に近い方に限って補正に利用することが可能となる。
【0078】
イベントには、テーマパークの予定のように、時間、位置共に広い範囲のイベントとなる場合がある。この場合は、テーマパーク内の移動を図示したり、そこで撮影した写真に施設の名称を補足情報として付加したり、イベント内の子イベントとして自動的にイベントを生成することが出来る。
【0079】
また、複数の位置情報と場所の名称を対にしたリストをイベントに登録しておくことで、携帯電話機1で取られた位置情報を、いずれかの位置の近い方に限って補正に利用することが可能となる。
【0080】
さらに、テーマパークのホームページなどに上記の位置情報のリストを登録しておき、イベントとの関連付けをすることによって、位置情報を簡単に利用者に提供することが出来る。
【0081】
上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピューターなどに、プログラム記録媒体からインストールされる。
【0082】
この発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化したり、上記実施の形態に開示されている複数の構成要素を適宜組み合わせたりすることにより種々の発明を形成できる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施の形態に亘る構成要素を適宜組み合わせても良い。
【符号の説明】
【0083】
1 携帯電話機
2 デジタルカメラ
4 サーバー
5 ネットワーク
11 位置情報ログ取得部
42 記憶部
43 位置情報追加部
44 位置情報精度判定部
45 位置情報補正部
【特許請求の範囲】
【請求項1】
ユーザーの位置に対応する位置にある機器の位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報を記憶する記憶手段と、
前記記憶手段に記憶されている前記位置情報の精度が低い場合、前記位置情報の取得時刻の前後の時刻の2つの位置情報に基づいて、前記位置情報を補正する位置情報補正手段と
を備えることを特徴とする位置情報補正システム。
【請求項2】
前記位置情報補正手段は、前記機器が前記位置情報が示す位置にあるときの時刻の前後の時刻の2つの位置情報を前記記憶手段から検索し、検索した2つの位置情報が示す位置を結ぶ直線上の、双方の取得時刻と前記位置情報の取得時刻の比により算出した位置を示す位置情報で補正する
ことを特徴とする請求項1に記載の位置情報補正システム。
【請求項3】
前記位置情報補正手段は、検索した前記2つの位置情報の精度とその位置情報が示す位置により特定される範囲に、補正対象となる位置情報が示す位置が存在する場合に、前記位置情報を補正する
ことを特徴とする請求項2に記載の位置情報補正システム。
【請求項4】
前記記憶手段は、写真データをさらに記憶し、
前記写真データの撮影時刻の前後の時刻の2つの位置情報を前記記憶手段から検索し、検索した2つの位置情報の直線上の、双方の取得時刻と前記写真データの撮影時刻の比により算出した位置を示す位置情報を前記写真データに付加する位置情報追加手段をさらに備える
ことを特徴とする請求項1乃至請求項3のいずれかに記載の位置情報補正システム。
【請求項5】
ユーザーの位置に対応する位置にある第1の機器の位置が示す第1の位置情報を取得する第1の位置情報取得手段と、
前記ユーザーの位置に対応する位置にある第2の機器の位置が示す第2の位置情報であって、その情報が示す位置精度は、前記第1の位置情報が示す位置精度よりも高い前記第2の位置情報を取得する第2の位置情報取得手段と、
前記第1の位置情報および前記第2の位置情報を、機器毎に記憶する記憶手段と、
前記第2の位置情報を追加して前記第1の位置情報を補完する位置情報追加手段と
を備えることを特徴とする位置情報補正システム。
【請求項6】
前記位置情報追加手段は、前記第2の位置情報が示す位置の時刻の前後の時刻の2つの前記第1の位置情報を前記記憶手段から検索し、検索した2つの前記第1の位置情報の精度により位置の範囲を算出し、前記第2の位置情報が前記位置の範囲内である場合に、前記第2の位置情報を前記第1の位置情報に追加して統合する
ことを特徴とする請求項5に記載の位置情報補正システム。
【請求項1】
ユーザーの位置に対応する位置にある機器の位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報を記憶する記憶手段と、
前記記憶手段に記憶されている前記位置情報の精度が低い場合、前記位置情報の取得時刻の前後の時刻の2つの位置情報に基づいて、前記位置情報を補正する位置情報補正手段と
を備えることを特徴とする位置情報補正システム。
【請求項2】
前記位置情報補正手段は、前記機器が前記位置情報が示す位置にあるときの時刻の前後の時刻の2つの位置情報を前記記憶手段から検索し、検索した2つの位置情報が示す位置を結ぶ直線上の、双方の取得時刻と前記位置情報の取得時刻の比により算出した位置を示す位置情報で補正する
ことを特徴とする請求項1に記載の位置情報補正システム。
【請求項3】
前記位置情報補正手段は、検索した前記2つの位置情報の精度とその位置情報が示す位置により特定される範囲に、補正対象となる位置情報が示す位置が存在する場合に、前記位置情報を補正する
ことを特徴とする請求項2に記載の位置情報補正システム。
【請求項4】
前記記憶手段は、写真データをさらに記憶し、
前記写真データの撮影時刻の前後の時刻の2つの位置情報を前記記憶手段から検索し、検索した2つの位置情報の直線上の、双方の取得時刻と前記写真データの撮影時刻の比により算出した位置を示す位置情報を前記写真データに付加する位置情報追加手段をさらに備える
ことを特徴とする請求項1乃至請求項3のいずれかに記載の位置情報補正システム。
【請求項5】
ユーザーの位置に対応する位置にある第1の機器の位置が示す第1の位置情報を取得する第1の位置情報取得手段と、
前記ユーザーの位置に対応する位置にある第2の機器の位置が示す第2の位置情報であって、その情報が示す位置精度は、前記第1の位置情報が示す位置精度よりも高い前記第2の位置情報を取得する第2の位置情報取得手段と、
前記第1の位置情報および前記第2の位置情報を、機器毎に記憶する記憶手段と、
前記第2の位置情報を追加して前記第1の位置情報を補完する位置情報追加手段と
を備えることを特徴とする位置情報補正システム。
【請求項6】
前記位置情報追加手段は、前記第2の位置情報が示す位置の時刻の前後の時刻の2つの前記第1の位置情報を前記記憶手段から検索し、検索した2つの前記第1の位置情報の精度により位置の範囲を算出し、前記第2の位置情報が前記位置の範囲内である場合に、前記第2の位置情報を前記第1の位置情報に追加して統合する
ことを特徴とする請求項5に記載の位置情報補正システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−211840(P2012−211840A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−77888(P2011−77888)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]