
位置把握システムとその装置及び位置把握方法

【課題】各移動体に搭載される位置把握装置から構成される位置把握システムにおいて、送信トラフィックを抑制し、さらに移動体間で相互の位置を正確に把握できる位置把握システムとその装置及び位置把握方法を提供すること。
【解決手段】位置把握装置10において、自己位置標定装置11による標定の結果得られた自己位置と予測計算装置14による予測計算の結果得られた自己位置を判定処理部15で比較し、両者の誤差が許容範囲を超えた場合に、標定の結果得られた自己位置を他の移動体へ送信することで自己位置を通知し、一方で、他移動体の位置は、他移動体から位置情報を受信したときには、その位置を表示部13に表示し、受信しなかったときには、受信した他移動体の位置及び速度ベクトルとから予測計算された他移動体の位置を表示することで把握するようにすることで、送信トラフィックを抑制し、各移動体相互の位置を正確に把握する。
【解決手段】位置把握装置10において、自己位置標定装置11による標定の結果得られた自己位置と予測計算装置14による予測計算の結果得られた自己位置を判定処理部15で比較し、両者の誤差が許容範囲を超えた場合に、標定の結果得られた自己位置を他の移動体へ送信することで自己位置を通知し、一方で、他移動体の位置は、他移動体から位置情報を受信したときには、その位置を表示部13に表示し、受信しなかったときには、受信した他移動体の位置及び速度ベクトルとから予測計算された他移動体の位置を表示することで把握するようにすることで、送信トラフィックを抑制し、各移動体相互の位置を正確に把握する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体間で相互の位置の正確な把握を可能とする位置把握システムとその装置及び位置把握方法に関する。
【背景技術】
【0002】
従来、GPS(Global Positioning System)に対応した通信装置を移動体に搭載し、人工衛星より検出した移動体の位置、進行方向等に係る情報を基地局へ送信して、基地局で移動体の位置等を監視できるようにした移動体位置把握システムが各種存在している(例えば特許文献1及び2参照)。
【0003】
また、基地局を介さず、移動体の位置を把握する方法として、各移動体が位置把握システムを搭載し、各々が位置把握に必要な情報の送信及び受信を行うことにより、相互の位置を把握するというものもある。このとき、位置把握システムは、送信した情報及び受信した情報を基に各移動体の位置を取得し、これらを各移動体に搭載された表示器に表示することにより、移動体の位置把握を実現する。各移動体の位置は、位置把握に必要な情報の送信頻度が多いほど、より正確に把握することが可能であることが知られている。しかし、移動体が密集する場所や通信に使用できる周波数帯域が少ない場所では、相互の位置把握に必要な情報の送信トラフィックの抑制が望まれており、この対策として、情報の送信間隔を、例えば5分間隔のように、一定の間隔で間引きする方法が取られている。
【0004】
しかしながら、上記のように固定された一定間隔(例えば5分間隔)の送信では、移動体に急な速度変化等がある場合、表示位置と実際の位置とで大きな差が生じることがある。また、送信タイミングが各移動体間で大きく異なる場合、実際とは異なった移動体間の位置関係が表示されることがある。
【特許文献1】特開2001−307296号公報
【特許文献2】特開2004−312289号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
以上のように、従来の位置把握システムでは、移動体間相互の位置把握に必要な情報を固定された一定間隔で送信するため、移動体間相互の正確な位置を把握できなかった。
【0006】
そこで、本発明の目的は、送信トラフィックを抑制し、さらに移動体間で相互の位置を正確に把握できる位置把握システムとその装置及び位置把握方法を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、第1の移動体に搭載される第1の位置把握装置と、前記第1の移動体とは別の第2の移動体に搭載される第2の位置把握装置とを具備する位置把握システムであって、前記第1および第2の位置把握装置は、自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、この自己位置標定部により測定された現在位置を他装置に通知する送信部と、前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段と、前記自己位置標定部により測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大する制御手段とを備える。
【0008】
このようにして、移動体の速度ベクトルの大小に応じて標定間隔を縮小拡大することで、移動体の走行速度に適したタイミングで当該移動体の現在位置と速度ベクトルを測定するようにしている。すなわち、データの伝送量を必要最小限にできるので、要求される位置把握の精度はそのままに、トラフィックを減少させることができる。
【発明の効果】
【0009】
本発明によれば、予測計算による移動体の位置把握及び標定間隔の設定が可能であるため、送信トラフィックの抑制が実現でき、各移動体間で相互の位置の把握を正確に行うことのできる位置把握システムを提供することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0011】
図1は、本発明の一実施形態に係る、2台の車両の相互の位置を示す概略図である。図1における道路1には車両C1、C2が存在しており、矢印方向へ走行している。車両C1、C2には相互の位置を把握するため、各車両に位置把握装置が搭載されている。このとき、当該各位置把握装置により、位置把握システムが構成されている。
【0012】
図2は、本発明の一実施形態に係る、位置把握装置の構成を示すブロック図である。
【0013】
図2に示す位置把握装置10は、自己位置標定装置11と、速度ベクトル計測装置12と、表示部13と、予測計算装置14と、判定処理部15と、受信部16と、送信部17と、保存部18と、入力部20と、道路情報記録部21と、制御部19とを具備している。
【0014】
自己位置標定装置11は、例えばGPSに対応した通信装置であり、制御部19の指示に従い、標定間隔毎に自己位置の標定を行う。なお、標定間隔とは、自己位置標定装置11が最初に自己位置を標定してから次の標定を行うまでの時間間隔のことであり、装置起動時に入力部20によって入力される。
【0015】
速度ベクトル計測装置12は、例えばジャイロや加速度計を利用した計測装置であり、制御部19の指示に従い、標定間隔毎に自己車両の速度ベクトルの計測を行う。
【0016】
表示部13は、制御部19の指示に従い、自己位置標定装置11が標定した自己位置と共に、受信部16で受信した標定の結果得られた相手位置、または予測計算装置14で予測計算の結果得られた相手位置を表示する。
【0017】
予測計算装置14は、その内部に周辺の道路情報を記録した道路情報記録部21を具備しており、制御部19の指示に従い、保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて、自己位置の未来位置の予測計算を行う。また、保存部18に保存された相手位置と、相手の速度ベクトルと、道路情報とを用いて、相手位置の未来位置の予測計算を行う。
【0018】
判定処理部15は、制御部19の指示に従い、自己位置標定装置11による標定の結果得られた自己位置と、予測計算装置14による予測計算の結果得られた自己位置とを比較し、その誤差が許容範囲を超えるか否かの判定を行う。なお、許容範囲とは、装置起動時に入力部20により入力されるパラメータに基づくものであり、例えば、「許容範囲は位置誤差が100m以内」のように設定することができる。
【0019】
受信部16は、相手車両が送信した、相手位置及び相手の速度ベクトルの受信を行う。
【0020】
送信部17は、制御部19の指示に従い、最初に自己位置標定装置11により標定された自己位置及び速度ベクトル計測装置12により計測された速度ベクトルを相手車両に送信する。それ以降、送信部17は、自己位置標定装置11による標定の結果得られた自己位置と予測計算装置14による予測計算の結果得られた自己位置との誤差が許容範囲を超えている場合にのみ、相手車両へ自己位置及び速度ベクトルの送信を行う。
【0021】
保存部18は、制御部19の指示に従い、自己位置標定装置11による標定の結果得られた自己位置と予測計算装置14による予測計算の結果得られた自己位置との誤差が許容範囲を超えている場合に、自己位置及び速度ベクトルの保存を行う。また、受信部16に他の車両からの相手位置の受信があったときには、そのときの相手位置及び相手の速度ベクトルを保存する。
【0022】
入力部20は、装置起動時に、位置情報の把握を行う集団に属する移動体の入力、誤差評価に用いる許容範囲の入力、自己位置の標定のタイミングを決定する標定間隔の入力を行う。
【0023】
制御部19は、位置把握装置10としての動作を実現するための制御機能を有する。
【0024】
次に、上記構成における動作について説明する。
【0025】
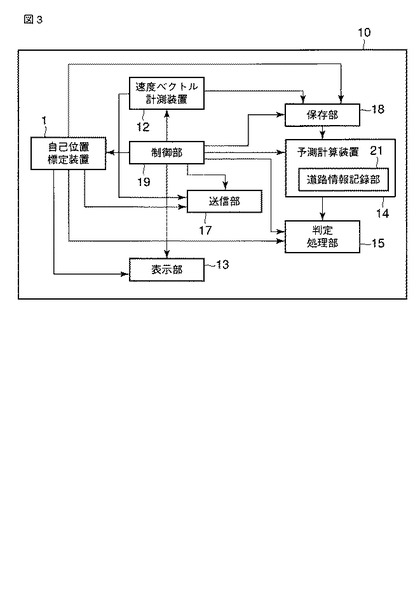
図3は、本発明の一実施形態に係る、車両C1に搭載された位置把握装置10が自己位置の表示及び車両C2に自己位置を把握させるときの主要要素を示したブロック図である。図4は、車両C1に搭載された位置把握装置10の制御部19が自己位置の表示及び車両C2に自己位置を把握させるときの処理動作を示すフローチャートである。
【0026】
図3における位置把握装置の起動とともに、車両C1に搭載された位置把握装置10の入力部20は、位置情報の把握を行う集団に属する移動体と、誤差判別のときに用いる許容範囲の入力を行う。本実施形態では、移動体は、車両C1、C2であり、許容範囲は「許容範囲は位置誤差が100m以内」とした。そして、車両C1、C2の移動速度に応じた標定間隔を設定し、制御部19へ通知する。つまり、移動速度の大小に応じて、標定間隔を縮小拡大する。
【0027】
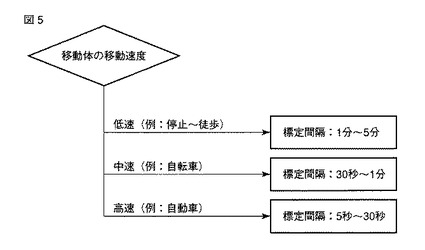
標定間隔は、図5に示されるように設定され、本実施形態では、自動車の位置把握を行うため、標定間隔は例えば30秒と設定される。低速(停止〜徒歩)の移動体については標定間隔は1分〜5分とする。中速(自転車等)の移動体については標定間隔は30秒〜1分とする。このように、本実施形態では、移動体の移動速度に応じて標定間隔を可変する。すなわち、速度の遅い移動体については時間あたりの位置の変化が少ないと見込まれるので、自己の位置を他の移動体にそれほど頻繁に通知しなくともよい。よって、トラフィックの削減を重視して標定間隔を長く取るようにする。逆に、速度の速い移動体については時間あたりの位置の変化が大きいと見込まれるので、自己の位置を他の移動体に頻繁に通知する必要がある。よって、位置把握の正確さを重視して標定間隔を短く取るようにする。このようにすることで、データを無駄なく伝送できるようになり、要求される位置把握の精度はそのままに、トラフィックを減少させることができる。
【0028】
さて、図4において、まず、制御部19は、自己位置標定装置11に自己位置の標定を行わせ、同時に速度ベクトル計測装置12に自己の速度ベクトルの計測を行わせる(ステップST4a)。ここで標定された自己位置は、制御部19により表示部13に表示される(ステップST4b)。
【0029】
この最初の自己位置標定及び速度ベクトル計算の結果は、制御部19の指示により、送信部17から車両C2に搭載された位置把握装置10へと伝送される(ステップST4c)。このときの自己位置及び速度ベクトルは、制御部19により、保存部18へ保存される(ステップST4d)。
【0030】
保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて、制御部19は、予測計算装置14に標定間隔後の、すなわち30秒後の自己位置の予測計算を行わせる(ステップST4e)。
【0031】
続いて、制御部19は、30秒後の自己位置の標定を自己位置標定装置11に行わせ、同時に速度ベクトルの計測を速度ベクトル計測装置12に行わせる(ステップST4f)。ここで標定された自己位置は、制御部19により表示部13に表示される(ステップST4g)。
【0032】
制御部19は、判定処理部15において、この標定の結果得られた自己位置と予測計算の結果得られた自己位置との比較を行い(ステップST4h)、標定の結果得られた自己位置と予測計算の結果得られた自己位置との誤差が許容範囲を超えているか否かの判断を行う(ステップST4i)。
【0033】
標定の結果得られた自己位置と予測計算の結果得られた自己位置との誤差が許容範囲を超えていた場合(ステップST4iのYes)、制御部19は、送信部17により、このときの標定の結果得られた自己位置と速度ベクトルを車両C2に搭載された位置把握装置10へ送信する(ステップST4j)。送信された自己位置及び速度ベクトルは、制御部19の指示により、保存部18へ上書きされる(ステップST4k)。
【0034】
標定の結果得られた自己位置と予測計算の結果得られた自己位置との誤差が許容範囲を超えていなかった場合(ステップST4iのNo)、制御部19は、予測計算装置14により、ステップST4dで保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて次の標定間隔後、すなわちスタートから換算して1分後の自己位置の予測計算を行う(ステップST4e)。
【0035】
ステップST4kに続いて、制御部19は、位置把握装置10の電源を切るか否かの判断を行い(ステップST4l)、位置把握装置10の電源を切る場合(ステップST4lのYes)、システムを終了する。
【0036】
位置把握装置10の電源スイッチを切らない場合(ステップST4lのNo)、制御部19は、予測計算装置14により、ステップST4kで保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて次の標定間隔後、すなわちスタートから換算して1分後の自己位置の予測計算を行う(ステップST4e)。
【0037】
以後、位置把握装置10の電源を切るまで、本行程が繰り返される。
【0038】
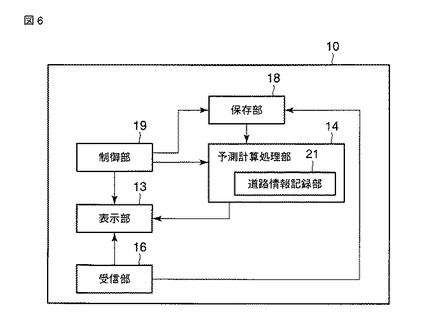
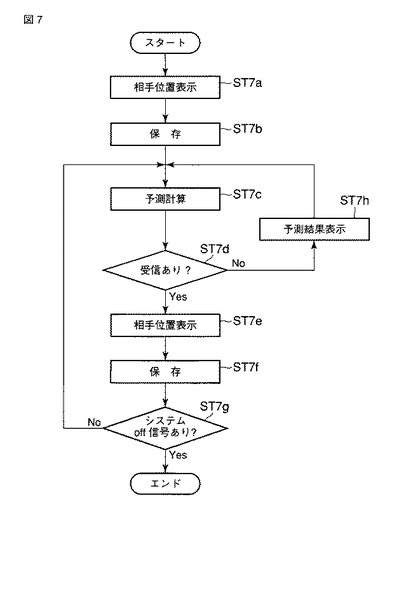
図6は、本発明の一実施形態に係る、車両C1に搭載された位置把握装置10が車両C2の位置把握を行うときの主要要素を示したブロック図である。図7は、車両C1に搭載された位置把握装置10の制御部19が車両C2の位置把握を行うときの処理動作を示すフローチャートである。
【0039】
図7において、まず、受信部16は、車両C2に搭載した位置把握装置10が最初に標定及び計測した相手位置及び相手の速度ベクトルを受信する。
【0040】
この受信により、制御部19は、このときの相手位置を表示部13に表示する(ステップST7a)。また、制御部19は、この相手位置及び相手の速度ベクトルを、保存部18へ保存する(ステップST7b)。
【0041】
保存部18に保存された相手位置及び相手の速度ベクトルと道路情報記録部21に記録された道路情報とを用いて、制御部19は、予測計算装置14にて標定間隔後、すなわち30秒後の相手位置の予測計算を行う(ステップST7c)。
【0042】
続いて、制御部19は、受信部16が、車両C2に搭載した位置把握装置10から30秒後の相手位置及び相手の速度ベクトルを受信したか否かの判断を行う(ステップST7d)。
【0043】
車両C2に搭載した位置把握装置10から相手位置及び相手の速度ベクトルを受信した場合(ステップST7dのYes)、制御部19は、受信した相手位置を表示部13に表示させる(ステップST7e)。このとき受信した相手位置及び相手の速度ベクトルは、制御部19により、保存部18へ上書きされる(ステップST7f)。
【0044】
車両C2に搭載した位置把握装置10から相手の位置及び相手の速度ベクトルを受信しなかった場合(ステップST7dのNo)、制御部19は、表示部13にステップST7cの予測計算の結果得られた相手位置を表示する(ステップST7h)。これに従い、ステップST7cへ移行し、ステップST7bで保存された相手位置と相手の速度ベクトルを用いて次の標定間隔後、すなわちスタートから換算して1分後の相手位置の予測計算を行う。
【0045】
ステップST7fに続き、制御部19は、位置把握装置10の電源を切るか否かの判断を行い(ステップST7g)、位置把握装置10の電源を切る場合(ステップST7gのYes)、システムを終了する。
【0046】
位置把握装置10の電源を切らない場合(ステップST7gのNo)、制御部19は、予測計算装置14により、ステップST7fで保存部18に保存された相手位置及び相手の速度ベクトルと道路情報記録部21に記録された道路情報とを用いて次の標定間隔後、すなわちスタートから換算して1分後の相手位置の予測計算を行う(ステップST7c)。
【0047】
以後、位置把握装置10の電源を切るまで、本行程が繰り返される。
【0048】
以上のように、上記実施形態によれば、車両C1、C2の移動速度に応じた標定間隔を設定し、車両C1、C2の移動速度に適したタイミングで当該車両の現在位置と速度ベクトルを測定するようにしている。また、予測計算の結果得られた自己位置と標定の結果得られた自己位置とを比較し、両者の誤差が許容範囲を超える場合には標定の結果得られた自己位置を移動体の存在位置として扱い、車両C2への情報の送信を行い、誤差が許容範囲以下の場合には予測計算の結果得られた自己位置を移動体の存在位置として扱い、車両C2への情報の送信は行わないようにしている。
【0049】
これにより、自動車の速度に見合った標定間隔を設定できるため、各車両C1、C2間で相互の位置を正確に把握でき、また、予測計算の結果得られた自己位置と標定の結果得られた自己位置との誤差が許容範囲を超えた場合に、車両C1から車両C2への情報の送信が行われるため、情報の送信間隔が一定である従来の場合よりも車両C1、C2間の送信トラフィックを抑制することが可能である。したがって、高度の位置把握の精度を保ちつつ、送信トラフィックを減少させることが可能となる。
【0050】
なお、この発明は上記実施形態に限定されるものではない。例えば、上記実施形態では、2台の車両C1、C2間で位置把握を行う例について説明したが、車両が2台である必要は無く、3台以上ある場合でも同様に実施可能である。さらに、車両に限らず、歩行者や自転車の位置把握における場合でも同様に実施可能である。
【0051】
また、上記実施形態では、システムの起動時かつ速度ベクトル計測装置による速度ベクトルの計測前に、使用者が標定間隔を設定する例について説明したが、システムの起動時の車両の速度ベクトルを速度ベクトル計測装置にて計測し、その速度ベクトルに基づいて、制御部が標定間隔を設定する場合でも同様に実施可能である。
【0052】
その他、システム構成や、自己位置標定装置及び速度ベクトル計測装置の種類やその機能、予測計算装置の計算方法、許容範囲の設定方法等についてもこの発明の要旨を逸脱しない範囲で種々変形して実施できる。
【0053】
さらに、この発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0054】
【図1】本発明の一実施形態に係る、2台の車両の相互の位置を示す概略図。
【図2】本発明の一実施形態に係る、位置把握装置の構成を示すブロック図。
【図3】本発明の一実施形態に係る、車両C1に搭載された位置把握装置が自己位置の表示及び車両C2に自己位置を把握させるときの主要要素を示すブロック図。
【図4】車両C1に搭載された位置把握装置の制御部が自己位置の表示及び車両C2に自己位置を把握させるときの処理動作を示すフローチャート。
【図5】本発明の一実施形態に係る、標定間隔の一例を示す概略図。
【図6】車両C1に搭載された位置把握装置が車両C2の位置把握を行うときの主要要素を示すブロック図。
【図7】車両C1に搭載された位置把握装置の制御部が車両C2の位置把握を行うときの処理動作を示すフローチャート。
【符号の説明】
【0055】
1…道路、10…位置把握装置、11…自己位置標定装置、12…速度ベクトル計測装置、13…表示部、14…予測計算装置、15…判定処理部、16…受信部、17…送信部、18…保存部、19…制御部、20…入力部、21…道路情報記録部
【技術分野】
【0001】
本発明は、移動体間で相互の位置の正確な把握を可能とする位置把握システムとその装置及び位置把握方法に関する。
【背景技術】
【0002】
従来、GPS(Global Positioning System)に対応した通信装置を移動体に搭載し、人工衛星より検出した移動体の位置、進行方向等に係る情報を基地局へ送信して、基地局で移動体の位置等を監視できるようにした移動体位置把握システムが各種存在している(例えば特許文献1及び2参照)。
【0003】
また、基地局を介さず、移動体の位置を把握する方法として、各移動体が位置把握システムを搭載し、各々が位置把握に必要な情報の送信及び受信を行うことにより、相互の位置を把握するというものもある。このとき、位置把握システムは、送信した情報及び受信した情報を基に各移動体の位置を取得し、これらを各移動体に搭載された表示器に表示することにより、移動体の位置把握を実現する。各移動体の位置は、位置把握に必要な情報の送信頻度が多いほど、より正確に把握することが可能であることが知られている。しかし、移動体が密集する場所や通信に使用できる周波数帯域が少ない場所では、相互の位置把握に必要な情報の送信トラフィックの抑制が望まれており、この対策として、情報の送信間隔を、例えば5分間隔のように、一定の間隔で間引きする方法が取られている。
【0004】
しかしながら、上記のように固定された一定間隔(例えば5分間隔)の送信では、移動体に急な速度変化等がある場合、表示位置と実際の位置とで大きな差が生じることがある。また、送信タイミングが各移動体間で大きく異なる場合、実際とは異なった移動体間の位置関係が表示されることがある。
【特許文献1】特開2001−307296号公報
【特許文献2】特開2004−312289号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
以上のように、従来の位置把握システムでは、移動体間相互の位置把握に必要な情報を固定された一定間隔で送信するため、移動体間相互の正確な位置を把握できなかった。
【0006】
そこで、本発明の目的は、送信トラフィックを抑制し、さらに移動体間で相互の位置を正確に把握できる位置把握システムとその装置及び位置把握方法を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、第1の移動体に搭載される第1の位置把握装置と、前記第1の移動体とは別の第2の移動体に搭載される第2の位置把握装置とを具備する位置把握システムであって、前記第1および第2の位置把握装置は、自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、この自己位置標定部により測定された現在位置を他装置に通知する送信部と、前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段と、前記自己位置標定部により測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大する制御手段とを備える。
【0008】
このようにして、移動体の速度ベクトルの大小に応じて標定間隔を縮小拡大することで、移動体の走行速度に適したタイミングで当該移動体の現在位置と速度ベクトルを測定するようにしている。すなわち、データの伝送量を必要最小限にできるので、要求される位置把握の精度はそのままに、トラフィックを減少させることができる。
【発明の効果】
【0009】
本発明によれば、予測計算による移動体の位置把握及び標定間隔の設定が可能であるため、送信トラフィックの抑制が実現でき、各移動体間で相互の位置の把握を正確に行うことのできる位置把握システムを提供することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0011】
図1は、本発明の一実施形態に係る、2台の車両の相互の位置を示す概略図である。図1における道路1には車両C1、C2が存在しており、矢印方向へ走行している。車両C1、C2には相互の位置を把握するため、各車両に位置把握装置が搭載されている。このとき、当該各位置把握装置により、位置把握システムが構成されている。
【0012】
図2は、本発明の一実施形態に係る、位置把握装置の構成を示すブロック図である。
【0013】
図2に示す位置把握装置10は、自己位置標定装置11と、速度ベクトル計測装置12と、表示部13と、予測計算装置14と、判定処理部15と、受信部16と、送信部17と、保存部18と、入力部20と、道路情報記録部21と、制御部19とを具備している。
【0014】
自己位置標定装置11は、例えばGPSに対応した通信装置であり、制御部19の指示に従い、標定間隔毎に自己位置の標定を行う。なお、標定間隔とは、自己位置標定装置11が最初に自己位置を標定してから次の標定を行うまでの時間間隔のことであり、装置起動時に入力部20によって入力される。
【0015】
速度ベクトル計測装置12は、例えばジャイロや加速度計を利用した計測装置であり、制御部19の指示に従い、標定間隔毎に自己車両の速度ベクトルの計測を行う。
【0016】
表示部13は、制御部19の指示に従い、自己位置標定装置11が標定した自己位置と共に、受信部16で受信した標定の結果得られた相手位置、または予測計算装置14で予測計算の結果得られた相手位置を表示する。
【0017】
予測計算装置14は、その内部に周辺の道路情報を記録した道路情報記録部21を具備しており、制御部19の指示に従い、保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて、自己位置の未来位置の予測計算を行う。また、保存部18に保存された相手位置と、相手の速度ベクトルと、道路情報とを用いて、相手位置の未来位置の予測計算を行う。
【0018】
判定処理部15は、制御部19の指示に従い、自己位置標定装置11による標定の結果得られた自己位置と、予測計算装置14による予測計算の結果得られた自己位置とを比較し、その誤差が許容範囲を超えるか否かの判定を行う。なお、許容範囲とは、装置起動時に入力部20により入力されるパラメータに基づくものであり、例えば、「許容範囲は位置誤差が100m以内」のように設定することができる。
【0019】
受信部16は、相手車両が送信した、相手位置及び相手の速度ベクトルの受信を行う。
【0020】
送信部17は、制御部19の指示に従い、最初に自己位置標定装置11により標定された自己位置及び速度ベクトル計測装置12により計測された速度ベクトルを相手車両に送信する。それ以降、送信部17は、自己位置標定装置11による標定の結果得られた自己位置と予測計算装置14による予測計算の結果得られた自己位置との誤差が許容範囲を超えている場合にのみ、相手車両へ自己位置及び速度ベクトルの送信を行う。
【0021】
保存部18は、制御部19の指示に従い、自己位置標定装置11による標定の結果得られた自己位置と予測計算装置14による予測計算の結果得られた自己位置との誤差が許容範囲を超えている場合に、自己位置及び速度ベクトルの保存を行う。また、受信部16に他の車両からの相手位置の受信があったときには、そのときの相手位置及び相手の速度ベクトルを保存する。
【0022】
入力部20は、装置起動時に、位置情報の把握を行う集団に属する移動体の入力、誤差評価に用いる許容範囲の入力、自己位置の標定のタイミングを決定する標定間隔の入力を行う。
【0023】
制御部19は、位置把握装置10としての動作を実現するための制御機能を有する。
【0024】
次に、上記構成における動作について説明する。
【0025】
図3は、本発明の一実施形態に係る、車両C1に搭載された位置把握装置10が自己位置の表示及び車両C2に自己位置を把握させるときの主要要素を示したブロック図である。図4は、車両C1に搭載された位置把握装置10の制御部19が自己位置の表示及び車両C2に自己位置を把握させるときの処理動作を示すフローチャートである。
【0026】
図3における位置把握装置の起動とともに、車両C1に搭載された位置把握装置10の入力部20は、位置情報の把握を行う集団に属する移動体と、誤差判別のときに用いる許容範囲の入力を行う。本実施形態では、移動体は、車両C1、C2であり、許容範囲は「許容範囲は位置誤差が100m以内」とした。そして、車両C1、C2の移動速度に応じた標定間隔を設定し、制御部19へ通知する。つまり、移動速度の大小に応じて、標定間隔を縮小拡大する。
【0027】
標定間隔は、図5に示されるように設定され、本実施形態では、自動車の位置把握を行うため、標定間隔は例えば30秒と設定される。低速(停止〜徒歩)の移動体については標定間隔は1分〜5分とする。中速(自転車等)の移動体については標定間隔は30秒〜1分とする。このように、本実施形態では、移動体の移動速度に応じて標定間隔を可変する。すなわち、速度の遅い移動体については時間あたりの位置の変化が少ないと見込まれるので、自己の位置を他の移動体にそれほど頻繁に通知しなくともよい。よって、トラフィックの削減を重視して標定間隔を長く取るようにする。逆に、速度の速い移動体については時間あたりの位置の変化が大きいと見込まれるので、自己の位置を他の移動体に頻繁に通知する必要がある。よって、位置把握の正確さを重視して標定間隔を短く取るようにする。このようにすることで、データを無駄なく伝送できるようになり、要求される位置把握の精度はそのままに、トラフィックを減少させることができる。
【0028】
さて、図4において、まず、制御部19は、自己位置標定装置11に自己位置の標定を行わせ、同時に速度ベクトル計測装置12に自己の速度ベクトルの計測を行わせる(ステップST4a)。ここで標定された自己位置は、制御部19により表示部13に表示される(ステップST4b)。
【0029】
この最初の自己位置標定及び速度ベクトル計算の結果は、制御部19の指示により、送信部17から車両C2に搭載された位置把握装置10へと伝送される(ステップST4c)。このときの自己位置及び速度ベクトルは、制御部19により、保存部18へ保存される(ステップST4d)。
【0030】
保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて、制御部19は、予測計算装置14に標定間隔後の、すなわち30秒後の自己位置の予測計算を行わせる(ステップST4e)。
【0031】
続いて、制御部19は、30秒後の自己位置の標定を自己位置標定装置11に行わせ、同時に速度ベクトルの計測を速度ベクトル計測装置12に行わせる(ステップST4f)。ここで標定された自己位置は、制御部19により表示部13に表示される(ステップST4g)。
【0032】
制御部19は、判定処理部15において、この標定の結果得られた自己位置と予測計算の結果得られた自己位置との比較を行い(ステップST4h)、標定の結果得られた自己位置と予測計算の結果得られた自己位置との誤差が許容範囲を超えているか否かの判断を行う(ステップST4i)。
【0033】
標定の結果得られた自己位置と予測計算の結果得られた自己位置との誤差が許容範囲を超えていた場合(ステップST4iのYes)、制御部19は、送信部17により、このときの標定の結果得られた自己位置と速度ベクトルを車両C2に搭載された位置把握装置10へ送信する(ステップST4j)。送信された自己位置及び速度ベクトルは、制御部19の指示により、保存部18へ上書きされる(ステップST4k)。
【0034】
標定の結果得られた自己位置と予測計算の結果得られた自己位置との誤差が許容範囲を超えていなかった場合(ステップST4iのNo)、制御部19は、予測計算装置14により、ステップST4dで保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて次の標定間隔後、すなわちスタートから換算して1分後の自己位置の予測計算を行う(ステップST4e)。
【0035】
ステップST4kに続いて、制御部19は、位置把握装置10の電源を切るか否かの判断を行い(ステップST4l)、位置把握装置10の電源を切る場合(ステップST4lのYes)、システムを終了する。
【0036】
位置把握装置10の電源スイッチを切らない場合(ステップST4lのNo)、制御部19は、予測計算装置14により、ステップST4kで保存部18に保存された自己位置及び速度ベクトルと道路情報記録部21に記録された道路情報とを用いて次の標定間隔後、すなわちスタートから換算して1分後の自己位置の予測計算を行う(ステップST4e)。
【0037】
以後、位置把握装置10の電源を切るまで、本行程が繰り返される。
【0038】
図6は、本発明の一実施形態に係る、車両C1に搭載された位置把握装置10が車両C2の位置把握を行うときの主要要素を示したブロック図である。図7は、車両C1に搭載された位置把握装置10の制御部19が車両C2の位置把握を行うときの処理動作を示すフローチャートである。
【0039】
図7において、まず、受信部16は、車両C2に搭載した位置把握装置10が最初に標定及び計測した相手位置及び相手の速度ベクトルを受信する。
【0040】
この受信により、制御部19は、このときの相手位置を表示部13に表示する(ステップST7a)。また、制御部19は、この相手位置及び相手の速度ベクトルを、保存部18へ保存する(ステップST7b)。
【0041】
保存部18に保存された相手位置及び相手の速度ベクトルと道路情報記録部21に記録された道路情報とを用いて、制御部19は、予測計算装置14にて標定間隔後、すなわち30秒後の相手位置の予測計算を行う(ステップST7c)。
【0042】
続いて、制御部19は、受信部16が、車両C2に搭載した位置把握装置10から30秒後の相手位置及び相手の速度ベクトルを受信したか否かの判断を行う(ステップST7d)。
【0043】
車両C2に搭載した位置把握装置10から相手位置及び相手の速度ベクトルを受信した場合(ステップST7dのYes)、制御部19は、受信した相手位置を表示部13に表示させる(ステップST7e)。このとき受信した相手位置及び相手の速度ベクトルは、制御部19により、保存部18へ上書きされる(ステップST7f)。
【0044】
車両C2に搭載した位置把握装置10から相手の位置及び相手の速度ベクトルを受信しなかった場合(ステップST7dのNo)、制御部19は、表示部13にステップST7cの予測計算の結果得られた相手位置を表示する(ステップST7h)。これに従い、ステップST7cへ移行し、ステップST7bで保存された相手位置と相手の速度ベクトルを用いて次の標定間隔後、すなわちスタートから換算して1分後の相手位置の予測計算を行う。
【0045】
ステップST7fに続き、制御部19は、位置把握装置10の電源を切るか否かの判断を行い(ステップST7g)、位置把握装置10の電源を切る場合(ステップST7gのYes)、システムを終了する。
【0046】
位置把握装置10の電源を切らない場合(ステップST7gのNo)、制御部19は、予測計算装置14により、ステップST7fで保存部18に保存された相手位置及び相手の速度ベクトルと道路情報記録部21に記録された道路情報とを用いて次の標定間隔後、すなわちスタートから換算して1分後の相手位置の予測計算を行う(ステップST7c)。
【0047】
以後、位置把握装置10の電源を切るまで、本行程が繰り返される。
【0048】
以上のように、上記実施形態によれば、車両C1、C2の移動速度に応じた標定間隔を設定し、車両C1、C2の移動速度に適したタイミングで当該車両の現在位置と速度ベクトルを測定するようにしている。また、予測計算の結果得られた自己位置と標定の結果得られた自己位置とを比較し、両者の誤差が許容範囲を超える場合には標定の結果得られた自己位置を移動体の存在位置として扱い、車両C2への情報の送信を行い、誤差が許容範囲以下の場合には予測計算の結果得られた自己位置を移動体の存在位置として扱い、車両C2への情報の送信は行わないようにしている。
【0049】
これにより、自動車の速度に見合った標定間隔を設定できるため、各車両C1、C2間で相互の位置を正確に把握でき、また、予測計算の結果得られた自己位置と標定の結果得られた自己位置との誤差が許容範囲を超えた場合に、車両C1から車両C2への情報の送信が行われるため、情報の送信間隔が一定である従来の場合よりも車両C1、C2間の送信トラフィックを抑制することが可能である。したがって、高度の位置把握の精度を保ちつつ、送信トラフィックを減少させることが可能となる。
【0050】
なお、この発明は上記実施形態に限定されるものではない。例えば、上記実施形態では、2台の車両C1、C2間で位置把握を行う例について説明したが、車両が2台である必要は無く、3台以上ある場合でも同様に実施可能である。さらに、車両に限らず、歩行者や自転車の位置把握における場合でも同様に実施可能である。
【0051】
また、上記実施形態では、システムの起動時かつ速度ベクトル計測装置による速度ベクトルの計測前に、使用者が標定間隔を設定する例について説明したが、システムの起動時の車両の速度ベクトルを速度ベクトル計測装置にて計測し、その速度ベクトルに基づいて、制御部が標定間隔を設定する場合でも同様に実施可能である。
【0052】
その他、システム構成や、自己位置標定装置及び速度ベクトル計測装置の種類やその機能、予測計算装置の計算方法、許容範囲の設定方法等についてもこの発明の要旨を逸脱しない範囲で種々変形して実施できる。
【0053】
さらに、この発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0054】
【図1】本発明の一実施形態に係る、2台の車両の相互の位置を示す概略図。
【図2】本発明の一実施形態に係る、位置把握装置の構成を示すブロック図。
【図3】本発明の一実施形態に係る、車両C1に搭載された位置把握装置が自己位置の表示及び車両C2に自己位置を把握させるときの主要要素を示すブロック図。
【図4】車両C1に搭載された位置把握装置の制御部が自己位置の表示及び車両C2に自己位置を把握させるときの処理動作を示すフローチャート。
【図5】本発明の一実施形態に係る、標定間隔の一例を示す概略図。
【図6】車両C1に搭載された位置把握装置が車両C2の位置把握を行うときの主要要素を示すブロック図。
【図7】車両C1に搭載された位置把握装置の制御部が車両C2の位置把握を行うときの処理動作を示すフローチャート。
【符号の説明】
【0055】
1…道路、10…位置把握装置、11…自己位置標定装置、12…速度ベクトル計測装置、13…表示部、14…予測計算装置、15…判定処理部、16…受信部、17…送信部、18…保存部、19…制御部、20…入力部、21…道路情報記録部
【特許請求の範囲】
【請求項1】
第1の移動体に搭載される第1の位置把握装置と、前記第1の移動体とは別の第2の移動体に搭載される第2の位置把握装置とを具備する位置把握システムであって、
前記第1および第2の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段と、
前記自己位置標定部により測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大する制御手段と
を備えることを特徴とする位置把握システム。
【請求項2】
前記第1および第2の位置把握装置は、
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項1に記載の位置把握システム。
【請求項3】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる前記位置把握装置であって、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段と、
前記自己位置標定部により測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大する制御手段と
を備えることを特徴とする位置把握装置。
【請求項4】
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項3に記載の位置把握装置。
【請求項5】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる位置把握方法であって、
前記複数の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定し、
前記測定された現在位置を他装置に通知し、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握し、
前記測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大することを特徴とする位置把握方法。
【請求項6】
前記複数の位置把握装置は、さらに、前記測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示することを特徴とする請求項5に記載の位置把握方法。
【請求項7】
第1の移動体に搭載される第1の位置把握装置と、前記第1の移動体とは別の第2の移動体に搭載される第2の位置把握装置とを具備する位置把握システムであって、
前記第1および第2の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置と速度ベクトルとから自装置の未来位置を予測する予測手段と、
前記予測手段により予測された前記自装置の未来位置と、前記自己位置標定部により測定された現在位置との誤差を算出し、この誤差が規定の許容範囲以上であるか否かを判定する判定処理部と、
この判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置の現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段とを備えることを特徴とする位置把握システム。
【請求項8】
前記第1および第2の位置把握装置は、
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項7に記載の位置把握システム。
【請求項9】
前記送信部は、前記判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置を搭載する移動体の速度ベクトルを前記他装置に通知し、
前記第1および第2の位置把握装置は、さらに、前記他装置から通知されたこの他装置の現在位置と当該他装置の速度ベクトルとから前記他装置の未来位置を予測する予測処理手段を備え、
前記表示部は、前記予測処理手段により予測された前記他装置の未来位置を表示することを特徴とする請求項8に記載の位置把握システム。
【請求項10】
前記第1及び第2の移動体は道路上を走行し、
前記予測手段は、前記現在位置と、前記速度ベクトルと、道路情報とから前記自装置の未来位置を予測することを特徴とする請求項7に記載の位置把握システム。
【請求項11】
前記第1及び第2の移動体は道路上を走行し、
前記予測処理手段は、前記他装置から通知されたこの他装置の現在位置と、当該他装置の速度ベクトルと、道路情報とから前記他装置の未来位置を予測することを特徴とする請求項9に記載の位置把握システム。
【請求項12】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる前記位置把握装置であって、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置と速度ベクトルとから自装置の未来位置を予測する予測手段と、
前記予測手段により予測された前記自装置の未来位置と、前記自己位置標定部により測定された現在位置との誤差を算出し、この誤差が規定の許容範囲以上であるか否かを判定する判定処理部と、
この判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置の現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段とを備えることを特徴とする位置把握装置。
【請求項13】
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項12に記載の位置把握装置。
【請求項14】
さらに、予測処理手段を備え、
前記送信部は、前記判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置を搭載する移動体の速度ベクトルを前記他装置に通知し、
前記予測処理手段は、前記他装置から通知されたこの他装置の現在位置と当該他装置の速度ベクトルとから前記他装置の未来位置を予測し、
前記表示部は、前記予測処理手段により予測された前記他装置の未来位置を表示することを特徴とする請求項13に記載の位置把握装置。
【請求項15】
前記複数の移動体は道路上を走行し、
前記予測手段は、前記現在位置と、前記速度ベクトルと、道路情報とから前記自装置の未来位置を予測することを特徴とする請求項12に記載の位置把握装置。
【請求項16】
前記複数の移動体は道路上を走行し、
前記予測処理手段は、前記他装置から通知されたこの他装置の現在位置と、当該他装置の速度ベクトルと、道路情報とから前記他装置の未来位置を予測することを特徴とする請求項14に記載の位置把握装置。
【請求項17】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる位置把握方法であって、
前記複数の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定し、
前記測定された現在位置と速度ベクトルとから自装置の未来位置を予測し、
前記予測された前記自装置の未来位置と、前記自己位置標定部により測定された現在位置との誤差を算出し、この誤差が規定の許容範囲以上であるか否かを判定し、
前記誤差が規定の許容範囲以上であると判定された場合に、前記測定された自装置の現在位置を他装置に通知し、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握することを特徴とする位置把握方法。
【請求項18】
前記複数の位置把握装置は、さらに、前記測定された自装置の現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示することを特徴とする請求項17に記載の位置把握方法。
【請求項19】
前記複数の位置把握装置は、
前記誤差が規定の許容範囲以上であると判定された場合に、前記測定された自装置を搭載する移動体の速度ベクトルを前記他装置に通知し、
さらに、前記他装置から通知されたこの他装置の現在位置と当該他装置の速度ベクトルとから前記他装置の未来位置を予測し、
前記予測された前記他装置の未来位置を表示することを特徴とする請求項18に記載の位置把握方法。
【請求項20】
前記複数の移動体は道路上を走行し、
前記複数の位置把握装置は、前記自装置の現在位置と、前記速度ベクトルと、道路情報とから前記自装置の未来位置を予測することを特徴とする請求項17に記載の位置把握方法。
【請求項21】
前記複数の移動体は道路上を走行し、
前記複数の位置把握装置は、前記他装置から通知されたこの他装置の現在位置と、当該他装置の速度ベクトルと、道路情報とから前記他装置の未来位置を予測することを特徴とする請求項19に記載の位置把握方法。
【請求項1】
第1の移動体に搭載される第1の位置把握装置と、前記第1の移動体とは別の第2の移動体に搭載される第2の位置把握装置とを具備する位置把握システムであって、
前記第1および第2の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段と、
前記自己位置標定部により測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大する制御手段と
を備えることを特徴とする位置把握システム。
【請求項2】
前記第1および第2の位置把握装置は、
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項1に記載の位置把握システム。
【請求項3】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる前記位置把握装置であって、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段と、
前記自己位置標定部により測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大する制御手段と
を備えることを特徴とする位置把握装置。
【請求項4】
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項3に記載の位置把握装置。
【請求項5】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる位置把握方法であって、
前記複数の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定し、
前記測定された現在位置を他装置に通知し、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握し、
前記測定された速度ベクトルの大小に応じて前記標定間隔を縮小拡大することを特徴とする位置把握方法。
【請求項6】
前記複数の位置把握装置は、さらに、前記測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示することを特徴とする請求項5に記載の位置把握方法。
【請求項7】
第1の移動体に搭載される第1の位置把握装置と、前記第1の移動体とは別の第2の移動体に搭載される第2の位置把握装置とを具備する位置把握システムであって、
前記第1および第2の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置と速度ベクトルとから自装置の未来位置を予測する予測手段と、
前記予測手段により予測された前記自装置の未来位置と、前記自己位置標定部により測定された現在位置との誤差を算出し、この誤差が規定の許容範囲以上であるか否かを判定する判定処理部と、
この判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置の現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段とを備えることを特徴とする位置把握システム。
【請求項8】
前記第1および第2の位置把握装置は、
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項7に記載の位置把握システム。
【請求項9】
前記送信部は、前記判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置を搭載する移動体の速度ベクトルを前記他装置に通知し、
前記第1および第2の位置把握装置は、さらに、前記他装置から通知されたこの他装置の現在位置と当該他装置の速度ベクトルとから前記他装置の未来位置を予測する予測処理手段を備え、
前記表示部は、前記予測処理手段により予測された前記他装置の未来位置を表示することを特徴とする請求項8に記載の位置把握システム。
【請求項10】
前記第1及び第2の移動体は道路上を走行し、
前記予測手段は、前記現在位置と、前記速度ベクトルと、道路情報とから前記自装置の未来位置を予測することを特徴とする請求項7に記載の位置把握システム。
【請求項11】
前記第1及び第2の移動体は道路上を走行し、
前記予測処理手段は、前記他装置から通知されたこの他装置の現在位置と、当該他装置の速度ベクトルと、道路情報とから前記他装置の未来位置を予測することを特徴とする請求項9に記載の位置把握システム。
【請求項12】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる前記位置把握装置であって、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定する自己位置標定部と、
この自己位置標定部により測定された現在位置と速度ベクトルとから自装置の未来位置を予測する予測手段と、
前記予測手段により予測された前記自装置の未来位置と、前記自己位置標定部により測定された現在位置との誤差を算出し、この誤差が規定の許容範囲以上であるか否かを判定する判定処理部と、
この判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置の現在位置を他装置に通知する送信部と、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握する把握手段とを備えることを特徴とする位置把握装置。
【請求項13】
さらに、前記自己位置標定部により測定された現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示する表示部を備えることを特徴とする請求項12に記載の位置把握装置。
【請求項14】
さらに、予測処理手段を備え、
前記送信部は、前記判定処理部において前記誤差が規定の許容範囲以上であると判定された場合に、前記自己位置標定部により測定された自装置を搭載する移動体の速度ベクトルを前記他装置に通知し、
前記予測処理手段は、前記他装置から通知されたこの他装置の現在位置と当該他装置の速度ベクトルとから前記他装置の未来位置を予測し、
前記表示部は、前記予測処理手段により予測された前記他装置の未来位置を表示することを特徴とする請求項13に記載の位置把握装置。
【請求項15】
前記複数の移動体は道路上を走行し、
前記予測手段は、前記現在位置と、前記速度ベクトルと、道路情報とから前記自装置の未来位置を予測することを特徴とする請求項12に記載の位置把握装置。
【請求項16】
前記複数の移動体は道路上を走行し、
前記予測処理手段は、前記他装置から通知されたこの他装置の現在位置と、当該他装置の速度ベクトルと、道路情報とから前記他装置の未来位置を予測することを特徴とする請求項14に記載の位置把握装置。
【請求項17】
複数の移動体にそれぞれ個別に搭載される複数の位置把握装置を具備する位置把握システムに用いられる位置把握方法であって、
前記複数の位置把握装置は、
自装置の現在位置と自装置を搭載する移動体の速度ベクトルとを標定間隔毎に測定し、
前記測定された現在位置と速度ベクトルとから自装置の未来位置を予測し、
前記予測された前記自装置の未来位置と、前記自己位置標定部により測定された現在位置との誤差を算出し、この誤差が規定の許容範囲以上であるか否かを判定し、
前記誤差が規定の許容範囲以上であると判定された場合に、前記測定された自装置の現在位置を他装置に通知し、
前記他装置から通知されたこの他装置の現在位置と自装置の現在位置とから、自装置を搭載する移動体と前記他装置を搭載する移動体との位置関係を把握することを特徴とする位置把握方法。
【請求項18】
前記複数の位置把握装置は、さらに、前記測定された自装置の現在位置と、前記他装置から通知されたこの他装置の現在位置とを表示することを特徴とする請求項17に記載の位置把握方法。
【請求項19】
前記複数の位置把握装置は、
前記誤差が規定の許容範囲以上であると判定された場合に、前記測定された自装置を搭載する移動体の速度ベクトルを前記他装置に通知し、
さらに、前記他装置から通知されたこの他装置の現在位置と当該他装置の速度ベクトルとから前記他装置の未来位置を予測し、
前記予測された前記他装置の未来位置を表示することを特徴とする請求項18に記載の位置把握方法。
【請求項20】
前記複数の移動体は道路上を走行し、
前記複数の位置把握装置は、前記自装置の現在位置と、前記速度ベクトルと、道路情報とから前記自装置の未来位置を予測することを特徴とする請求項17に記載の位置把握方法。
【請求項21】
前記複数の移動体は道路上を走行し、
前記複数の位置把握装置は、前記他装置から通知されたこの他装置の現在位置と、当該他装置の速度ベクトルと、道路情報とから前記他装置の未来位置を予測することを特徴とする請求項19に記載の位置把握方法。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−70261(P2008−70261A)
【公開日】平成20年3月27日(2008.3.27)
【国際特許分類】
【出願番号】特願2006−249907(P2006−249907)
【出願日】平成18年9月14日(2006.9.14)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成20年3月27日(2008.3.27)
【国際特許分類】
【出願日】平成18年9月14日(2006.9.14)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]