
位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置
【課題】 第2通信装置の位置を検出することが可能な位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【解決手段】 複数の第1通信装置と第2通信装置との間の複数の距離に基づいて第2通信装置の位置を検出する位置検出システムであって、複数の第1通信装置はそれぞれ、第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、距離算出用信号に応じた信号の受信によって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出する検出部と、当該位相差に基づいて第2通信装置との間の距離を算出する算出部と、を備え、第2通信装置は、距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離に基づいて、第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
【解決手段】 複数の第1通信装置と第2通信装置との間の複数の距離に基づいて第2通信装置の位置を検出する位置検出システムであって、複数の第1通信装置はそれぞれ、第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、距離算出用信号に応じた信号の受信によって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出する検出部と、当該位相差に基づいて第2通信装置との間の距離を算出する算出部と、を備え、第2通信装置は、距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離に基づいて、第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置に関する。
【背景技術】
【0002】
近年、所定の処理を実行すべく相互に通信を行う通信装置として、例えば鍵を用いることなくエンジンの始動・停止が可能な機能(以下、スマートイグニッション機能という)を搭載した自動車における車載機と携帯機がある。
【0003】
以下、スマートイグニッション機能を搭載した自動車における車載機と携帯機の通信について詳述する。車載機は例えば自動車内部に設けられ、携帯機は当該自動車の運転手が所持しているものとする。そして、運転手は、自動車のドアをアンロックして自動車に乗り込んだものとする。
【0004】
自動車内部に別途設けられた制御部は、自動車のドアが閉じられたことに基づく信号を受信すると、車載機にエンジン始動を許可するか否かを確認するための信号を送信する。車載機は、制御部からの当該信号を受信すると、携帯機が自動車内にあるか否かを確認するための信号(以下、信号Aという)を送信する。携帯機が自動車内にあるとき、携帯機は車載機からの信号Aを受信し、当該信号Aに応じた信号Bを送信する。車載機は携帯機からの信号Bを受信すると、携帯機が自動車内にあると判別する。そして、車載機は前述した制御部にエンジン始動を許可するための信号を送信する。制御部は車載機からの当該信号を受信すると、例えば自動車のエンジンを始動・停止させるための切替スイッチの動作を有効とする。そして、運転手は当該切替スイッチを例えばオンすることによって、自動車のエンジンを始動させることが可能となる。或いは、当該切替スイッチを例えばオフすることによって、自動車のエンジンを停止させることが可能となる。
【0005】
このように、スマートイグニッション機能を搭載した自動車においては、携帯機が自動車内にあれば前述した切替スイッチにて自動車のエンジンの始動・停止を行うことが可能となる。
【特許文献1】特開2001−351453号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前述したようなスマートイグニッション機能が搭載された自動車においては、鍵を自動車のエンジンを開始するために鍵穴に差し込む必要がない為に、携帯機を自動車内の何処に置いたのか運転手が忘れてしまう場合があった。更に、携帯機を自動車内の何処に置いてもエンジンの始動・停止を行うことが可能であるため、例えば自動車の走行中の振動等により携帯機が移動してしまい、携帯機を無くしてしまう恐れがあった。
【0007】
そこで、本発明は、第2通信装置(例えば携帯機)の位置を検出することが可能な位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するための発明は、複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、前記複数の第1通信装置は、それぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記複数の第1通信装置の複数の前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
【0009】
また、第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、前記第1通信装置は、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、前記検出部にて検出された前記複数の位相差に基づいて、前記第2通信装置との間の前記複数の距離を算出する算出部と、を備え、前記第2通信装置は、前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
【0010】
また、複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムの位置検出方法であって、前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、前記複数の第1通装置にて算出された複数の距離に基づいて、前記第2通信装置の位置を検出する、ことを特徴とする。
【0011】
また、位置検出通信装置は、相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の通信装置を備え、複数の前記算出部にて算出された複数の前記距離に基づいて、前記相手側通信装置の位置を検出する、ことを特徴とする。
【0012】
更に、通信装置は、距離を算出するための距離算出用信号を送信し、返信されてきた前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、当該複数の距離算出通信装置が算出した複数の距離に基づいて前記送信位置を検出する相手側通信装置、と通信可能であって、前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、ことを特徴とする。
【発明の効果】
【0013】
本発明によれば、第2通信装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0014】
本明細書および添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0015】
<<実施形態>>
===位置検出システム、位置検出通信装置、通信装置の全体構成===
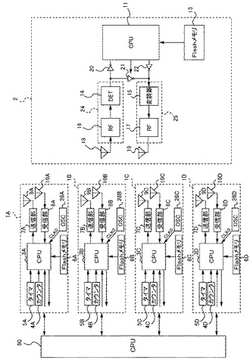
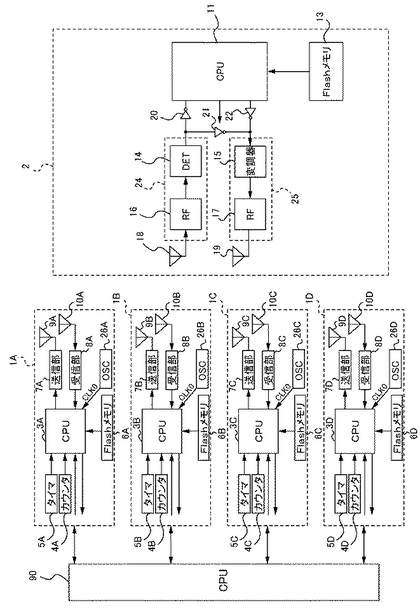
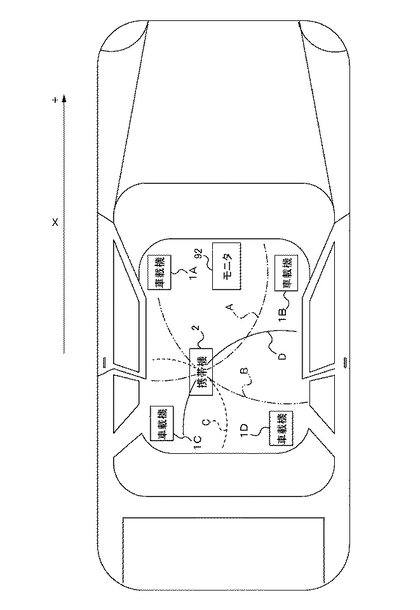
図1、図3を参照しつつ、本発明に係る位置検出システム、位置検出通信装置、通信装置について説明する。図1は、本発明に係る位置検出システム、位置検出通信装置、位置検出装置の全体構成の一例を示す機能ブロック図である。尚、本実施形態では位置検出システムは、例えばスマートイグニッション機能が搭載された自動車に用いるものとして説明する。そして、位置検出システムは、車載機1A、1B、1C、1D(第1通信装置)、携帯機2(第2通信装置)、CPU(Central Processing Unit)90(位置検出部)から構成される。また、位置検出通信装置は車載機1A、1B、1C、1D(通信装置)から構成され、相手側通信装置は携帯機2に用いられるものとする。更に、通信装置は携帯機2に用いられ、相手側通信装置は車載機1A、1B、1C、1D(距離算出通信装置)から構成される。図3は、車載機1A、1B、1C、1Dによる携帯機2の検出を示す図である。尚、図3における+X方向を自動車の前方方向とすると、例えば、車載機1Aは前方左側に設けられ、車載機1Bは前方右側に設けられ、車載機1Cは後方左側に設けられ、車載機1Dは後方右側に設けられるものとする。また、CPU90は、車載機1A、1B、1C、1Dが設けられた自動車内部に設けられるものとする。携帯機2は自動車のキー(鍵)に設けられているものとする。尚、本実施形態においては車載機を4つ設けているがこれに限るものではない。例えば、車載機をより多く設けて確実に携帯機2の位置を検出するよう設けても良い。
【0016】
尚、本実施形態では、車載機1A、1B、1C、1Dから携帯機2への信号の通信において、低周波数(例えば125kHz)の搬送波を用いることとする。また携帯機2から車載機1A、1B、1C、1Dへの信号の通信において、高周波数(例えば312MHz)の搬送波を用いることとする。即ち、車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波で通信が行われるため通信速度が遅くなる。逆に、携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波で通信が行われるため通信速度が速くなる。通信速度が遅い低周波数を用いているのは、後述するように車載機1A、1B、1C、1Dから信号を送信させた時間と当該信号が携帯機2を介して返信されてきた時間との信号の位相差(時間差でもよい)を意図的に生じさせるためである。また、携帯機2から車載機1A、1B、1C、1Dへの通信の場合、通信速度が速い高周波数を用いることによって、その間における位相差は車載機1A、1B、1C、1Dから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信における意図的に生じさせた位相差のみをもって、車載機1A、1B、1C、1Dと携帯機2の間の距離を算出することが可能となる。そのため、意図的な低周波数を車載機1A、1B、1C、1Dから携帯機2への通信に用い、さらに高周波数を携帯機2から車載機1A、1B、1C、1Dへの通信に用いている。
【0017】
更に、前述したような車載機1A、1B、1C、1Dから携帯機2への通信においては、ASK変調(振幅偏移変調:Amplitude Shift Keying)がなされた信号によって通信が行われる。何故ならば、車載機1A、1B、1C、1Dから携帯機2へ信号を送信するための送信部7A、7B、7C、7D(第1送信部、第1変調部)と、車載機1A、1B、1C、1Dからの信号を受信するための復調部24(第2復調部)の回路構成が容易で、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となるからである。また、携帯機2から車載機1A、1B、1C、1Dへの通信においては、FSK変調(周波数偏移変調:Frequency Shift Keying)がなされた信号によって通信が行われる。何故ならば、FSK変調がなされた信号は、ノイズによる影響を受けにくく、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となるからである。尚、本実施形態においては、車載機1A、1B、1C、1Dから携帯機2への通信においてASK変調された信号にて通信を行い、携帯機2から車載機1A、1B、1C、1Dへの通信においてFSK変調された信号にて通信を行っているがこれに限るものではない。例えば、信号の秘匿性を高めることができ、妨害波・干渉波に対する排除能力が著しく高いスペクトラム拡散にて車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信を行うことも可能である。
【0018】
CPU90は、車載機1A、1B、1C、1Dを統括制御する。
【0019】
車載機1Aは、CPU3A(検出部、算出部)、カウンタ4A、タイマ5A、Flashメモリ6A(記憶部)、送信部7A、受信部8A(第1復調部)、送信アンテナ9A、受信アンテナ10A、OSC26A(発振回路:Oscillator)を有している。
【0020】
送信部7Aは、CPU3Aからの信号を125kHzの周波数の搬送波でASK変調する。
【0021】
送信アンテナ9Aは、送信部7AにてASK変調された信号を送信する。
【0022】
受信アンテナ10Aは、携帯機2からのFSK変調された信号を受信する。
【0023】
受信部8Aは、受信アンテナ10Aが受信した携帯機2からのFSK変調された信号を復調する。
【0024】
CPU3Aは、車載機1Aを統括制御するために設けられている。Flashメモリ6Aには、CPU3Aが後述する処理を行うためのプログラムデータが予め記憶されている。Flashメモリ6Aは、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0025】
タイマ5Aは、CPU3Aからの指示に基づいて時間を計時する。
【0026】
OSC26Aは、所定周波数のクロック(CLK0)をCPU3Aに送信する。
【0027】
カウンタ4Aは、CPU90からの指示に基づいて、CPU3Aから送信部7Aに送信される車載機1Aから携帯機2までの距離を算出するための信号(以下、距離算出用信号という)の立上りから、OSC26Aからのクロックの例えば立ち上がりをカウントする。そして、カウンタ4Aは、受信部8Aにて復調された距離算出用信号の立ち上がりまで、OSC26Aからのクロックの立ち上がりをカウントする。また、カウンタ4Aのカウント値は、CPU3Aからの指示に基づいてリセットされる。
【0028】
CPU3Aは、CPU90からの指示信号に基づいて、携帯機2が自動車内にあるか否かを確認するための信号(以下、車内確認信号Aという)を送信部7Aに送信する。CPU3Aは、受信部8Aにて復調された携帯機2からの車内確認信号Bが送信される。CPU3Aは、車内確認信号Bが送信されたことに基づく信号(以下、確認信号という)をCPU90に送信する。CPU3Aは、車内確認信号Bが送信されてこなかったことに基づく信号(以下、未確認信号という)をCPU90に送信する。また、CPU3Aは、CPU90からの指示信号に基づいてインバータ21(返信部)を動作状態とするための信号(以下、インバータ動作指示信号)を送信部7Aに送信する。CPU3Aは、インバータ21を不動作状態とするための信号(以下、インバータ不動作指示信号という)を送信部7Aに送信する。また、CPU3Aは、前述した距離算出用信号を送信部7Aに送信するとともにカウンタ4Aをリセットさせてカウントを開始させる。また、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号を受信すると、カウンタ4Aのカウント値を読み出す。CPU3Aは、当該カウント値を基に車載機1Aから携帯機2までの距離を算出する。つまり、距離算出用信号を送信部7Aに送信した時間から、携帯機2を介して距離算出用信号が返信されてきた時間までの両信号の位相差を示すカウント値が得られ、CPU3Aは車載機1Aから携帯機2までの距離を算出することができる。例えば、OSC26Aからのクロックの周波数が15.75kHzである場合、携帯機2を介して距離算出用信号が返信されてきたときのカウンタ4Aのカウント値が250となっていたとき、このときの位相差は約15.87(msec)となる。そして、位相差が約15.87(msec)のときの車載機1Aから携帯機2までの距離は約1(m)となることが、例えば実験からもとめられているものとする。この実験からもとめられたカウント値に対応した距離データは、例えばFlashメモリ6Aにテーブルデータとして予め記憶されている。CPU3Aは、算出した車載機1Aから携帯機2までの距離情報をCPU90に送信する。
【0029】
車載機1B、1C、1Dの構成は、前述した車載機1Aと同様の構成である。尚、車載機1A、1B、1C、1Dは、同時にCPU90からの指示に基づいて前述した処理を行っても良いし、順次前述した処理を行っても良い。
【0030】
CPU90は、自動車内に設けられた制御部(不図示)からの指示信号に基づいて、CPU3A、3B、3C、3Dが前述した車内確認信号Aを送信するための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、車載機1A、1B、1C、1Dからの前述した確認信号に基づいて、自動車のエンジン始動を許可する信号(以下、エンジン始動許可信号という)を制御部に送信する。また、CPU90は、車載機1A、1B、1C、1Dからの前述した未確認信号に基づいて、自動車のエンジン始動を許可しないための信号(以下、エンジン始動不許可信号という)を制御部に送信する。CPU90は、制御部からの携帯機2を検出するための信号(以下、検出信号という)が送信される。CPU90は、当該検出信号に基づいて、CPU3A、3B、3C、3Dが前述したインバータ動作指示信号を送信するための指示信号を車載機1A、1B、1C、1Dに送信する。そして、CPU90は、CPU3A、3B、3C、3Dに車載機1A、1B、1C、1Dから携帯機2までの距離を算出させるための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、CPU3A、3B、3C、3Dが算出した車載機1A、1B、1C、1Dから携帯機2までの距離情報が送信される。CPU90は、CPU3A、3B、3C、3Dが算出した距離情報に基づいて、携帯機2の位置を検出する。この携帯機2の位置の検出において、CPU90はメモリ(不図示)に記憶された携帯機2の位置を検出するためのプログラムデータを読み出す。そして、CPU90による当該プログラムの演算処理において、車載機1A、1B、1C、1Dからの距離情報から読み出される各距離の一致点を用いることによって、携帯機2の位置を検出することができる。例えば、車載機1Aが算出した携帯機2までの距離が120cm、車載機1Bが算出した携帯機2までの距離が212cm、車載機1Cが算出した携帯機2までの距離が20cm、車載機1Dから携帯機2までの距離が117cmであったとする。そのとき、CPU90は、車載機1Aからの距離が120cmとなる点と、車載機1Bからの距離が212cmとなる点と、車載機1Cからの距離が20cmとなる点と、車載機1Dからの距離が117cmとなる点が一致する点を算出し、当該一致点上に携帯機2があるものと判別する。
【0031】
携帯機2は、CPU11(切替部)、Flashメモリ13、復調部24、変調部25(第2送信部、第2変調部)、受信アンテナ18、送信アンテナ19、インバータ20、21、22を有している。
【0032】
受信アンテナ18は、車載機1A、1B、1C、1DからのASK変調された信号を受信する。
【0033】
復調部24は、例えばRF16(Radio Frequency)、DET14(Detector)から構成されている。復調部24は、受信アンテナ18からのASK変調された信号を復調する。
【0034】
変調部25は、例えばRF17、変調器15から構成されている。変調部25は、CPU11からの信号を312MHzの周波数の搬送波でFSK変調する。また、変調部25は、CPU11の指示によってインバータ21が動作状態となっている場合、復調部24からの信号を312MHzの周波数の搬送波でFSK変調する。
【0035】
送信アンテナ19は、変調部25にてFSK変調された信号を送信する。
【0036】
CPU11は、携帯機2を統括制御するために設けられている。Flashメモリ13には、CPU11が後述する処理を行うためのプログラムデータが予め記憶されている。Flashメモリ13は、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0037】
CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからの車内確認信号Aが送信される。CPU11は当該車内確認信号Aに基づいて、変調部25に車内確認信号Bを送信する。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのインバータ動作指示信号が送信される。CPU11は、当該インバータ動作指示信号に基づいて、インバータ21を動作状態とする。そのため、復調部24にて復調された車載機1A、1B、1C、1Dからの信号に対して何ら処理が行われることがなく、そのまま変調部25にてFSK変調されて送信アンテナ19から送信させることが可能となる。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのインバータ不動作指示信号が送信され、当該インバータ不動作指示信号に基づいて、インバータ21を不動作状態とする。尚、CPU11のこれらの機能は、前述したFlashメモリ13から読み出されたプログラムデータの解読結果に基づいて、CPU11が当該プログラムを実行することによって実現される。CPU11は、Flashメモリ13のアドレスを指定するアドレスカウンタ(不図示)、Flashメモリ13から読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0038】
===位置検出システムの動作===
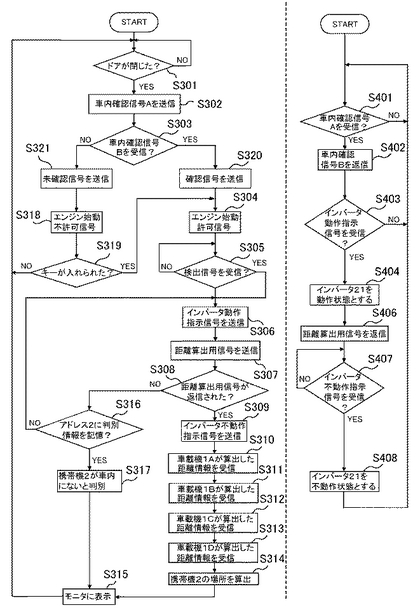
図1乃至図4を参照しつつ本発明に係る位置検出システム、位置検出通信装置、通信装置の動作について説明する。図2は、本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。図4は、モニタ92(表示部)の表示画面の一例を示す図である。
【0039】
尚、本実施形態においては、携帯機2の所持者(以下、携帯者という)が自動車のドアをアンロックして自動車に乗り込み携帯者が携帯機2を自動車内の何処かに置き、携帯者が携帯機2の位置を失念してしまった場合について説明する。また、インバータ21は不動作状態であるものとする。
【0040】
自動車内に別途設けられた制御部(不図示)は、自動車のドアが閉じられたことに基づく信号を受信する(S301)。制御部は、当該信号に基づいてエンジン始動を開始するか否かを確認するための信号をCPU90に送信する。
【0041】
そして、CPU90は、制御部からの当該信号に基づいて、CPU3A、3B、3C、3Dが車内確認信号Aを送信するための指示信号を車載機1A、1B、1C、1Dに送信する。
【0042】
以下、車載機1Aの動作について説明するが車載機1B、1C、1Dについても同様の動作であるものとする。
【0043】
CPU3Aは、CPU90からの前述した指示信号を受信すると、車内確認信号Aを送信部7Aに送信する(S302)。このとき、CPU3Aは、タイマ5Aをリセットする。リセットされたタイマ5Aは計時を開始する。そして、CPU3Aは、受信部8Aにて復調された携帯機2からの車内確認信号Bが、予め定められた時間内に送信されてくるか否かを判別する(S303)。送信部7Aは、当該車内確認信号Aを125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調された車内確認信号Aは送信アンテナ9Aを介して送信される。
【0044】
ASK変調された車内確認信号Aを携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された車内確認信号Aを復調する。そして、CPU11は、復調部24にて復調された車内確認信号Aが送信されたことを判別すると(S401・YES)、車内確認信号Bを変調部25に送信する(S402)。変調部25は、CPU11からの車内確認信号Bを312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された車内確認信号Bは、送信アンテナ19を介して送信される。
【0045】
FSK変調された車内確認信号Bを車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された車内確認信号Bを復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの車内確認信号Bが送信されたことを判別すると(S303・YES)、CPU90に確認信号を送信する(S320)。同様に、車載機1B、1C、1DのCPU3B、3C、3Dは、携帯機2からの車内確認信号Bが送信されたことを判別すると、確認信号をCPU90に送信する。尚、CPU3A、3B、3C、3Dは、車内確認信号Aを送信してから予め定められた時間内に受信部8A、8B、8C、8Dにて復調された車内確認信号Bが送信されてこないと判別した場合(S303・NO)、未確認信号をCPU90に送信する(S321)。
【0046】
CPU90は、車載機1A、1B、1C、1Dからの確認信号に基づいて、制御部(不図示)にエンジン始動許可信号を送信する(S304)。CPU90からの当該エンジン始動許可信号によって、例えば制御部は自動車のエンジンの駆動を開始させる。尚、CPU90は、車載機1A、1B、1C、1Dからの未確認信号に基づいて、制御部にエンジン始動不許可信号を制御部に送信する(S318)。そして、制御部は、キーが鍵穴に差し込まれるまで、自動車のエンジンの駆動を開始させないこととなる(S319)。
【0047】
例えば携帯者が携帯機2を自動車内の何処かに置き、携帯機2の位置を失念してしまった場合、携帯者は自動車内に設けられた入力部(不図示)に携帯機2を検出するための指示入力をする。制御部は、入力部に指示入力されたことに基づく指示信号を受信する。そして、制御部は、当該指示信号に基づいて検出信号をCPU90に送信する。CPU90は、制御部からの検出信号を受信すると(S305・YES)、CPU3A、3B、3C、3Dがインバータ動作指示信号を送信するための指示信号を車載機1A、1B、1C、1Dに送信する。
【0048】
CPU3Aは、CPU90からの前述した指示信号を受信すると、インバータ動作指示信号を送信部7Aに送信する(S306)。送信部7Aは、当該インバータ動作指示信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調されたインバータ動作指示信号は送信アンテナ9Aを介して送信される。
【0049】
ASK変調されたインバータ動作指示信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調されたインバータ動作指示信号を復調する。そして、CPU11は、復調部24にて復調されたインバータ動作指示信号が送信されたことを判別すると(S403・YES)、インバータ21を動作状態とする(S404)。
【0050】
また、CPU3Aは前述したインバータ動作指示信号を送信すると、距離算出用信号を送信部7Aに送信する(S307)。このときCPU3Aは、カウンタ4Aをリセットさせ、カウンタ4Aに当該距離算出用信号の立上りからカウントを開始させる。更に、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。そして、CPU3Aは、当該距離算出用信号が予め定められた時間内に携帯機2から返信されてくるか否かを判別する(S308)。送信部7Aは、当該距離算出用信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調された距離算出用信号は送信アンテナ9Aを介して送信される。
【0051】
ASK変調された距離算出用信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された距離算出用信号を復調する。このとき復調部24にて復調された車載機1Aからの距離算出用信号は、インバータ21が動作状態となっているため、そのまま変調部25に送信される(S406)。変調部25は、復調部24からの距離算出用信号を312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された距離算出用信号は、送信アンテナ19を介して送信される。
【0052】
FSK変調された距離算出用信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された距離算出用信号を復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号が送信されたことを判別すると(S308・YES)、カウンタ4Aのカウント値を読み出す。そして、CPU3Aは当該カウント値に基づいて、車載機1Aから携帯機2までの距離を算出する。尚、前述したように車載機1Aから携帯機2への通信においては、低周波数である125kHzの搬送波が用いられている。また、携帯機2から車載機1Aへの通信においては、高周波である312MHzの搬送波が用いられている。よって携帯機2から車載機1Aへの通信における位相差は、車載機1Aから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。そのためCPU3Aから送信部7Aに送信した距離算出用信号と受信部8Aにて復調された距離算出用信号とは、125kHzの低周波数を用いたことにより意図的な位相差が生じることとなる。よって、前述したCPU3Aが読み出した当該カウント値は、当該位相差を示していることとなる。そして、CPU3Aは、Flashメモリ6Aにテーブルデータとして記憶されている実験からもとめられた当該カウント値に対応する距離を読み出す。よって、CPU3は、当該位相差を示す当該カウント値を用いて、車載機1Aから携帯機2までの距離を算出することが可能となる。尚、本実施形態においては、カウンタ4Aのカウント値によって、車載機1Aから携帯機2までの距離を算出しているこれに限るものではない。例えば、CPU3Aは、CPU3Aから送信部7Aに距離算出用信号を送信させたときにタイマ5Aを計時させ、受信部8Aにて変調された携帯機2からの距離算出用信号が送信されたときのタイマ5Aが計時する時間を読み出す。そして、タイマ5Aが計時する当該時間を用いて車載機1Aから携帯機2までの距離を算出することも可能である。また、CPU3Aによる車載機1Aから携帯機2までの距離の算出は、1回に限るものでもない。例えば、複数回車載機1Aから携帯機2までの距離の算出を行って、より確実に車載機1Aから携帯機2までの距離を算出することも可能となる。尚、このときCPU3Aは、携帯機2からの距離算出用信号が返信されてくるまで、距離算出用信号を繰り返し送信するように設けても良い。そして、CPU3Aは算出した車載機1Aから携帯機2までの距離情報をCPU90に送信する(S310)。同様に、車載機1BのCPU3Bは、車載機1Bから携帯機2までの距離情報をCPU90に送信する(S311)。また、車載機1CのCPU3Cは、車載機1Cから携帯機2までの距離情報をCPU90に送信する(S312)。更に、車載機1DのCPU3Dは、車載機1Dから携帯機2までの距離情報をCPU90に送信する(S313)。また、CPU3Aは、車載機1Aから携帯機2までの距離を算出するとともにインバータ不動作指示信号を送信部7Aに送信する(S309)。送信部7Aは、当該インバータ不動作指示信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調されたインバータ不動作指示信号は送信アンテナ9Aを介して送信される。尚、CPU3Aは、距離算出用信号を送信してから予め定められた時間内に受信部8Aにて復調された距離算出用信号が返信されてこないと判別すると(S308・NO)、距離算出用信号が返信されてこないと判別した情報を、例えばFlashメモリ6Aのアドレス1から順に記憶させる。このときCPU3Aは、当該距離算出用信号が返信されてこないと判別した当該情報がアドレス2に記憶されている否かを判別する(S316)。そして、CPU3Aは、アドレス2に当該情報が記憶されていないと判別すると(S316・NO)、インバータ動作指示信号を再び送信部7Aに送信する(S306)。また、CPU3Aは前述したようにタイマ5Aをリセットさせて計時を開始させ、カウンタ4Aをリセットさせてカウントを開始させる。そして、CPU3Aは再び距離算出用信号が返信されてこないと判別すると(S308・NO)、距離算出用信号が返信されてこないと判別した情報を、例えばFlashメモリ6Aのアドレス2に記憶させる(S316)。そして、CPU3Aは、距離算出用信号が返信されてこないと判別した情報がアドレス2に記憶されていると判別すると(S316・YES)、当該判別に基づいた信号をCPU90に送信する。CPU90は、車載機1Aのみならず車載機1B、1C、1Dからの当該信号を受信すると、携帯機2が自動車内にないと判別する(S317)。そして、CPU90は、モニタ92に携帯機2が自動車内にないと表示させるべく指示信号を制御部(不図示)に送信する。制御部は、CPU90からの当該指示信号に基づいて、モニタ92に携帯機2が自動車内にないことを表示させる(S315)。
【0053】
前述したようにCPU90は、車載機1A、1B、1C、1Dからの前述した距離情報を受信すると、当該距離情報に基づいて携帯機2が自動車内の何処にあるかを検出する(S314)。尚、このときのCPU90による携帯機2の位置を検出は、前述したように車載機1Aを始点として当該始点からCPU3Aが算出した距離の点(図3・一点鎖線A)と、車載機1Bを始点として当該始点からCPU3Bが算出した距離の点(図3・二点鎖線B)と、車載機1Cを始点として当該始点からCPU3Cが算出した距離の点(図3・破線C)と、車載機1Dを始点として当該始点からCPU3Dが算出した距離の点(図3・実線D)とが一致する点から求められる。そして、CPU90は、検出した携帯機2の位置をモニタ92に表示させるべく指示信号を制御部に送信する。制御部は、CPU90からの指示信号に基づいてモニタ92に携帯機2の位置を表示させる(S315、図4)。
【0054】
このように、携帯者が携帯機2の位置を失念した場合、距離算出用信号によって各車載機1A、1B、1C、1Dから携帯機2までの距離を各CPU3A、3B、3C、3Dが算出することによって、携帯機2の位置をCPU90が検出することが可能となる。
【0055】
本実施形態によれば、車載機1Aから送信したときの距離算出用信号と、携帯機2からの距離算出用信号に応じた信号との位相差から、CPU3Aは、車載機1Aと携帯機2との間の距離を算出することが可能となる。また、車載機を複数設けることによって、CPU90は、CPU3A、3B、3C、3Dが算出した車載機1A、1B、1C、1Dと携帯機2との間の複数の距離に基づいて携帯機の位置を検出することが可能となる。
【0056】
また、車載機1A、1B、1C、1Dからの距離算出用信号をインバータ21にてそのまま返信することが可能となる。そのため、CPU3A、3B、3C、3Dは、送信部7A、7B、7C、7Dから送信した距離算出用信号と、携帯機2から返信された前記送信部7A、7B、7C、7Dから送信した距離算出用信号と同じ距離算出用信号と、から携帯機2との間の距離を算出しているので、正確な距離を確実に算出することが可能となる。
【0057】
また、車載機1A、1B、1C、1Dから携帯機2への通信において、低周波数の搬送波で通信を行うことによって位相差を意図的に生じさせることができる。また、携帯機2から車載機1A、1B、1C、1Dへの通信において、高周波の搬送波で通信を行うことによって、車載機1A、1B、1C、1Dから携帯機2への通信により生じた位相差に比べ無視できる程度の位相差とすることができる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信において意図的に生じさせた位相差によって、車載機1A、1B、1C、1Dから携帯機2までの距離を算出することが可能となる。
【0058】
また、CPU11にてインバータ21を動作状態とすることによって、距離算出用信号を車載機1A、1B、1C、1Dに返信することができ、CPU3A、3B、3C、3Dが携帯機2との間の距離を算出することが可能となる。更に、CPU11にてインバータ21を不動作状態とすることによって、以後車載機1A、1B、1C、1Dから送信される信号が、携帯機2からそのまま返信されることがなくなる。よって例えば車載機1A、1B、1C、1Dからの要求信号に応じて、所定の処理がなされた応答信号を携帯機2が送信することが可能となる。
【0059】
また、低周波数の搬送波で通信を行う車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波による変調に適したASK変調を用いることによって、送信部7A、7B、7C、7D及び復調部24の回路構成が容易となり、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となる。高周波数の搬送波で通信を行う携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波による変調に適したFSK変調を用いることによって、ノイズによる影響を受けにくくなり、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となる。
【0060】
また、車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信においてスペクトラム拡散にて通信を行うことにより、当該スペクトラム拡散にて送信された信号の秘匿性を高めることができ、また、妨害波・干渉波等に対する排除能力を著しく高めることができる。
【0061】
また、位相差を検出するためのタイマ5A、5B、5C、5Dと、所定周波数のクロックでカウントするカウンタ4A、4B、4C、4Dと、カウント値に基づいてCPU3A、3B、3C、3Dが携帯機2との間の距離を算出する基となるテーブルデータが記憶されているFlashメモリ6A、6B、6C、6Dとを用いて、CPU3A、3B、3C、3Dが携帯機2との距離を算出することを確実に行うことが可能となる。また、タイマ5A、5B、5C、5D及びカウンタ4A、4B、4C、4Dが、CPU3A、3B、3C、3Dが距離算出用信号を送信するごとにリセットされることにより、CPU3A、3B、3C、3Dが送信したときの距離算出用信号と、受信したときの前記CPU3A、3B、3C、3Dが送信した距離算出用信号と同じ距離算出用信号と、から携帯機2との間の距離を算出部が確実に算出することが可能となる。
【0062】
また、CPU3A、3B、3C、3Dにて算出した複数の距離に基づいてCPU11が検出した携帯機2の位置を自動車に設けられたモニタ92に表示させることが可能となる。そのため、携帯機2の位置を確実に知らせることが可能となる。
【0063】
===その他の実施の形態===
以上、本発明に係る位置検出システム、位置検出通信装置、通信装置における、携帯機2の位置の検出について説明したが、上記の説明は、本発明の理解を容易とするためのものであり、本発明を限定するものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得る。
【0064】
<<位置検出システム、位置検出通信装置、通信装置のその他の形態>>
本実施形態においては、自動車の前述した位置に車載機1A、1B、1C、1Dを設けているがこれに限るものではない。
【0065】
例えば、車載機1A、1B、1C、1Dが設けられた位置に、受信部8Aと受信アンテナ10A、受信部8Bと受信アンテナ10B、受信部8Cと受信アンテナ10C、受信部8Dと受信アンテナ10Dのみを設けても良い。その場合、車載機を例えば1つのみ設け、当該車載機にCPU3、送信部7、送信アンテナ9、OSC26、Flashメモリ6、タイマ5、カウンタ4を設ける。そして、前述したようにCPU3からの距離算出用信号が、送信部7を介して送信アンテナ9から送信される。CPU3は、携帯機2から返信される距離算出用信号を受信アンテナ10A、10B、10C、10Dを介して受信部8A、8B、8C、8Dが例えば受信した順に、当該距離算出用信号を受信した受信アンテナから携帯機2までの距離を算出する。そして、CPU90は、CPU3が算出した受信アンテナ10A、10B、10C、10Dから携帯機2までの各距離情報に基づいて携帯機2の位置を検出するように設けても良い。
【0066】
<<位置検出システム、位置検出通信装置、通信装置の適用>>
本実施形態では、位置検出システム、位置検出通信装置、通信装置をスマートイグニッション機能が搭載された自動車に用いているが、本発明の適用対象はこれに限るものではない。
【0067】
例えば携帯機2を貴重品に設けても良い。携帯機2が設けられた貴重品を失くした場合、車載機1A、1B、1C、1Dと同一の機能を有する探索機A、B、C、Dから距離算出用信号を送信させる。そして、貴重品に設けた携帯機2に探索機が近づくことによって、探索機A、B、C、Dからの距離算出用信号を携帯機2が返信する。携帯機2からの距離算出用信号が探索機A、B、C、Dに送信されてくることによって、探索機A、B、C、Dが携帯機2までの距離を算出することができる。そして、探索機A、B、C、Dが算出した携帯機2までの距離に基づいて、探索機A、B、C、Dを統括制御する例えば制御部が貴重品の位置を検出する。そして、別途設けられたモニタに貴重品の位置を表示することも可能である。
【0068】
また、居場所を特定する必要がある人(例えば園児又は老人。以下、被監視者という)に携帯機2を持たせ、車載機1A、1B、1C、1Dと同一の機能を有する監視装置A、B、C、Dを被監視者を監視する者(以下、監視者という)が管理する。そして、当該監視装置A、B、C、Dから車内確認信号Aと同一のエリア内確認信号Aを送信させる。仮に被監視者が通信可能範囲を出てしまった場合、当該被監視者が通信可能範囲を出る直前の監視装置A、B、C、Dが受信した車内確認信号Bと同一のエリア内確認信号Bに基づいて、被監視者が通信可能範囲を出た位置を監視者が容易に知ることが可能となる。なぜならば、監視装置は、エリア内確認信号Aを送信してから予め定められた時間内にエリア内確認信号Bが送信されてくるか否かを判別する。そのため、被監視者の最も近傍にある監視装置には、エリア内確認信号Bが最も早く送信されてくることとなる。よって、被監視者が通信可能範囲を出た位置が、当該被監視者の最も近傍にある監視装置によって判別することができる。そのため、監視者による被監視者の探索がより確実なものとなる。よって被監視者が通信可能範囲を出てしまったことによる事故を未然に防ぐことが可能となる。
【図面の簡単な説明】
【0069】
【図1】本発明に係る位置検出システム、位置検出通信装置、通信装置の全体構成の一例を示す図である。
【図2】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。
【図3】車載機1A、1B、1C、1Dによる携帯機2の検出を示す図である。
【図4】モニタ92の表示画面の一例を示す図である。
【符号の説明】
【0070】
1 車載機
2 携帯機
3、11、90 CPU
4 カウンタ
5 タイマ
6、13 Flashメモリ
7 送信部
8 受信部
9、19 送信アンテナ
10、18 受信アンテナ
14 DET
15 変調器
16、17 RF
20、21、22 インバータ
24 復調部
25 変調部
26 OSC
92 モニタ
【技術分野】
【0001】
本発明は、位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置に関する。
【背景技術】
【0002】
近年、所定の処理を実行すべく相互に通信を行う通信装置として、例えば鍵を用いることなくエンジンの始動・停止が可能な機能(以下、スマートイグニッション機能という)を搭載した自動車における車載機と携帯機がある。
【0003】
以下、スマートイグニッション機能を搭載した自動車における車載機と携帯機の通信について詳述する。車載機は例えば自動車内部に設けられ、携帯機は当該自動車の運転手が所持しているものとする。そして、運転手は、自動車のドアをアンロックして自動車に乗り込んだものとする。
【0004】
自動車内部に別途設けられた制御部は、自動車のドアが閉じられたことに基づく信号を受信すると、車載機にエンジン始動を許可するか否かを確認するための信号を送信する。車載機は、制御部からの当該信号を受信すると、携帯機が自動車内にあるか否かを確認するための信号(以下、信号Aという)を送信する。携帯機が自動車内にあるとき、携帯機は車載機からの信号Aを受信し、当該信号Aに応じた信号Bを送信する。車載機は携帯機からの信号Bを受信すると、携帯機が自動車内にあると判別する。そして、車載機は前述した制御部にエンジン始動を許可するための信号を送信する。制御部は車載機からの当該信号を受信すると、例えば自動車のエンジンを始動・停止させるための切替スイッチの動作を有効とする。そして、運転手は当該切替スイッチを例えばオンすることによって、自動車のエンジンを始動させることが可能となる。或いは、当該切替スイッチを例えばオフすることによって、自動車のエンジンを停止させることが可能となる。
【0005】
このように、スマートイグニッション機能を搭載した自動車においては、携帯機が自動車内にあれば前述した切替スイッチにて自動車のエンジンの始動・停止を行うことが可能となる。
【特許文献1】特開2001−351453号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前述したようなスマートイグニッション機能が搭載された自動車においては、鍵を自動車のエンジンを開始するために鍵穴に差し込む必要がない為に、携帯機を自動車内の何処に置いたのか運転手が忘れてしまう場合があった。更に、携帯機を自動車内の何処に置いてもエンジンの始動・停止を行うことが可能であるため、例えば自動車の走行中の振動等により携帯機が移動してしまい、携帯機を無くしてしまう恐れがあった。
【0007】
そこで、本発明は、第2通信装置(例えば携帯機)の位置を検出することが可能な位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するための発明は、複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、前記複数の第1通信装置は、それぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記複数の第1通信装置の複数の前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
【0009】
また、第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、前記第1通信装置は、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、前記検出部にて検出された前記複数の位相差に基づいて、前記第2通信装置との間の前記複数の距離を算出する算出部と、を備え、前記第2通信装置は、前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
【0010】
また、複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムの位置検出方法であって、前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、前記複数の第1通装置にて算出された複数の距離に基づいて、前記第2通信装置の位置を検出する、ことを特徴とする。
【0011】
また、位置検出通信装置は、相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の通信装置を備え、複数の前記算出部にて算出された複数の前記距離に基づいて、前記相手側通信装置の位置を検出する、ことを特徴とする。
【0012】
更に、通信装置は、距離を算出するための距離算出用信号を送信し、返信されてきた前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、当該複数の距離算出通信装置が算出した複数の距離に基づいて前記送信位置を検出する相手側通信装置、と通信可能であって、前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、ことを特徴とする。
【発明の効果】
【0013】
本発明によれば、第2通信装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0014】
本明細書および添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0015】
<<実施形態>>
===位置検出システム、位置検出通信装置、通信装置の全体構成===
図1、図3を参照しつつ、本発明に係る位置検出システム、位置検出通信装置、通信装置について説明する。図1は、本発明に係る位置検出システム、位置検出通信装置、位置検出装置の全体構成の一例を示す機能ブロック図である。尚、本実施形態では位置検出システムは、例えばスマートイグニッション機能が搭載された自動車に用いるものとして説明する。そして、位置検出システムは、車載機1A、1B、1C、1D(第1通信装置)、携帯機2(第2通信装置)、CPU(Central Processing Unit)90(位置検出部)から構成される。また、位置検出通信装置は車載機1A、1B、1C、1D(通信装置)から構成され、相手側通信装置は携帯機2に用いられるものとする。更に、通信装置は携帯機2に用いられ、相手側通信装置は車載機1A、1B、1C、1D(距離算出通信装置)から構成される。図3は、車載機1A、1B、1C、1Dによる携帯機2の検出を示す図である。尚、図3における+X方向を自動車の前方方向とすると、例えば、車載機1Aは前方左側に設けられ、車載機1Bは前方右側に設けられ、車載機1Cは後方左側に設けられ、車載機1Dは後方右側に設けられるものとする。また、CPU90は、車載機1A、1B、1C、1Dが設けられた自動車内部に設けられるものとする。携帯機2は自動車のキー(鍵)に設けられているものとする。尚、本実施形態においては車載機を4つ設けているがこれに限るものではない。例えば、車載機をより多く設けて確実に携帯機2の位置を検出するよう設けても良い。
【0016】
尚、本実施形態では、車載機1A、1B、1C、1Dから携帯機2への信号の通信において、低周波数(例えば125kHz)の搬送波を用いることとする。また携帯機2から車載機1A、1B、1C、1Dへの信号の通信において、高周波数(例えば312MHz)の搬送波を用いることとする。即ち、車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波で通信が行われるため通信速度が遅くなる。逆に、携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波で通信が行われるため通信速度が速くなる。通信速度が遅い低周波数を用いているのは、後述するように車載機1A、1B、1C、1Dから信号を送信させた時間と当該信号が携帯機2を介して返信されてきた時間との信号の位相差(時間差でもよい)を意図的に生じさせるためである。また、携帯機2から車載機1A、1B、1C、1Dへの通信の場合、通信速度が速い高周波数を用いることによって、その間における位相差は車載機1A、1B、1C、1Dから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信における意図的に生じさせた位相差のみをもって、車載機1A、1B、1C、1Dと携帯機2の間の距離を算出することが可能となる。そのため、意図的な低周波数を車載機1A、1B、1C、1Dから携帯機2への通信に用い、さらに高周波数を携帯機2から車載機1A、1B、1C、1Dへの通信に用いている。
【0017】
更に、前述したような車載機1A、1B、1C、1Dから携帯機2への通信においては、ASK変調(振幅偏移変調:Amplitude Shift Keying)がなされた信号によって通信が行われる。何故ならば、車載機1A、1B、1C、1Dから携帯機2へ信号を送信するための送信部7A、7B、7C、7D(第1送信部、第1変調部)と、車載機1A、1B、1C、1Dからの信号を受信するための復調部24(第2復調部)の回路構成が容易で、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となるからである。また、携帯機2から車載機1A、1B、1C、1Dへの通信においては、FSK変調(周波数偏移変調:Frequency Shift Keying)がなされた信号によって通信が行われる。何故ならば、FSK変調がなされた信号は、ノイズによる影響を受けにくく、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となるからである。尚、本実施形態においては、車載機1A、1B、1C、1Dから携帯機2への通信においてASK変調された信号にて通信を行い、携帯機2から車載機1A、1B、1C、1Dへの通信においてFSK変調された信号にて通信を行っているがこれに限るものではない。例えば、信号の秘匿性を高めることができ、妨害波・干渉波に対する排除能力が著しく高いスペクトラム拡散にて車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信を行うことも可能である。
【0018】
CPU90は、車載機1A、1B、1C、1Dを統括制御する。
【0019】
車載機1Aは、CPU3A(検出部、算出部)、カウンタ4A、タイマ5A、Flashメモリ6A(記憶部)、送信部7A、受信部8A(第1復調部)、送信アンテナ9A、受信アンテナ10A、OSC26A(発振回路:Oscillator)を有している。
【0020】
送信部7Aは、CPU3Aからの信号を125kHzの周波数の搬送波でASK変調する。
【0021】
送信アンテナ9Aは、送信部7AにてASK変調された信号を送信する。
【0022】
受信アンテナ10Aは、携帯機2からのFSK変調された信号を受信する。
【0023】
受信部8Aは、受信アンテナ10Aが受信した携帯機2からのFSK変調された信号を復調する。
【0024】
CPU3Aは、車載機1Aを統括制御するために設けられている。Flashメモリ6Aには、CPU3Aが後述する処理を行うためのプログラムデータが予め記憶されている。Flashメモリ6Aは、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0025】
タイマ5Aは、CPU3Aからの指示に基づいて時間を計時する。
【0026】
OSC26Aは、所定周波数のクロック(CLK0)をCPU3Aに送信する。
【0027】
カウンタ4Aは、CPU90からの指示に基づいて、CPU3Aから送信部7Aに送信される車載機1Aから携帯機2までの距離を算出するための信号(以下、距離算出用信号という)の立上りから、OSC26Aからのクロックの例えば立ち上がりをカウントする。そして、カウンタ4Aは、受信部8Aにて復調された距離算出用信号の立ち上がりまで、OSC26Aからのクロックの立ち上がりをカウントする。また、カウンタ4Aのカウント値は、CPU3Aからの指示に基づいてリセットされる。
【0028】
CPU3Aは、CPU90からの指示信号に基づいて、携帯機2が自動車内にあるか否かを確認するための信号(以下、車内確認信号Aという)を送信部7Aに送信する。CPU3Aは、受信部8Aにて復調された携帯機2からの車内確認信号Bが送信される。CPU3Aは、車内確認信号Bが送信されたことに基づく信号(以下、確認信号という)をCPU90に送信する。CPU3Aは、車内確認信号Bが送信されてこなかったことに基づく信号(以下、未確認信号という)をCPU90に送信する。また、CPU3Aは、CPU90からの指示信号に基づいてインバータ21(返信部)を動作状態とするための信号(以下、インバータ動作指示信号)を送信部7Aに送信する。CPU3Aは、インバータ21を不動作状態とするための信号(以下、インバータ不動作指示信号という)を送信部7Aに送信する。また、CPU3Aは、前述した距離算出用信号を送信部7Aに送信するとともにカウンタ4Aをリセットさせてカウントを開始させる。また、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号を受信すると、カウンタ4Aのカウント値を読み出す。CPU3Aは、当該カウント値を基に車載機1Aから携帯機2までの距離を算出する。つまり、距離算出用信号を送信部7Aに送信した時間から、携帯機2を介して距離算出用信号が返信されてきた時間までの両信号の位相差を示すカウント値が得られ、CPU3Aは車載機1Aから携帯機2までの距離を算出することができる。例えば、OSC26Aからのクロックの周波数が15.75kHzである場合、携帯機2を介して距離算出用信号が返信されてきたときのカウンタ4Aのカウント値が250となっていたとき、このときの位相差は約15.87(msec)となる。そして、位相差が約15.87(msec)のときの車載機1Aから携帯機2までの距離は約1(m)となることが、例えば実験からもとめられているものとする。この実験からもとめられたカウント値に対応した距離データは、例えばFlashメモリ6Aにテーブルデータとして予め記憶されている。CPU3Aは、算出した車載機1Aから携帯機2までの距離情報をCPU90に送信する。
【0029】
車載機1B、1C、1Dの構成は、前述した車載機1Aと同様の構成である。尚、車載機1A、1B、1C、1Dは、同時にCPU90からの指示に基づいて前述した処理を行っても良いし、順次前述した処理を行っても良い。
【0030】
CPU90は、自動車内に設けられた制御部(不図示)からの指示信号に基づいて、CPU3A、3B、3C、3Dが前述した車内確認信号Aを送信するための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、車載機1A、1B、1C、1Dからの前述した確認信号に基づいて、自動車のエンジン始動を許可する信号(以下、エンジン始動許可信号という)を制御部に送信する。また、CPU90は、車載機1A、1B、1C、1Dからの前述した未確認信号に基づいて、自動車のエンジン始動を許可しないための信号(以下、エンジン始動不許可信号という)を制御部に送信する。CPU90は、制御部からの携帯機2を検出するための信号(以下、検出信号という)が送信される。CPU90は、当該検出信号に基づいて、CPU3A、3B、3C、3Dが前述したインバータ動作指示信号を送信するための指示信号を車載機1A、1B、1C、1Dに送信する。そして、CPU90は、CPU3A、3B、3C、3Dに車載機1A、1B、1C、1Dから携帯機2までの距離を算出させるための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、CPU3A、3B、3C、3Dが算出した車載機1A、1B、1C、1Dから携帯機2までの距離情報が送信される。CPU90は、CPU3A、3B、3C、3Dが算出した距離情報に基づいて、携帯機2の位置を検出する。この携帯機2の位置の検出において、CPU90はメモリ(不図示)に記憶された携帯機2の位置を検出するためのプログラムデータを読み出す。そして、CPU90による当該プログラムの演算処理において、車載機1A、1B、1C、1Dからの距離情報から読み出される各距離の一致点を用いることによって、携帯機2の位置を検出することができる。例えば、車載機1Aが算出した携帯機2までの距離が120cm、車載機1Bが算出した携帯機2までの距離が212cm、車載機1Cが算出した携帯機2までの距離が20cm、車載機1Dから携帯機2までの距離が117cmであったとする。そのとき、CPU90は、車載機1Aからの距離が120cmとなる点と、車載機1Bからの距離が212cmとなる点と、車載機1Cからの距離が20cmとなる点と、車載機1Dからの距離が117cmとなる点が一致する点を算出し、当該一致点上に携帯機2があるものと判別する。
【0031】
携帯機2は、CPU11(切替部)、Flashメモリ13、復調部24、変調部25(第2送信部、第2変調部)、受信アンテナ18、送信アンテナ19、インバータ20、21、22を有している。
【0032】
受信アンテナ18は、車載機1A、1B、1C、1DからのASK変調された信号を受信する。
【0033】
復調部24は、例えばRF16(Radio Frequency)、DET14(Detector)から構成されている。復調部24は、受信アンテナ18からのASK変調された信号を復調する。
【0034】
変調部25は、例えばRF17、変調器15から構成されている。変調部25は、CPU11からの信号を312MHzの周波数の搬送波でFSK変調する。また、変調部25は、CPU11の指示によってインバータ21が動作状態となっている場合、復調部24からの信号を312MHzの周波数の搬送波でFSK変調する。
【0035】
送信アンテナ19は、変調部25にてFSK変調された信号を送信する。
【0036】
CPU11は、携帯機2を統括制御するために設けられている。Flashメモリ13には、CPU11が後述する処理を行うためのプログラムデータが予め記憶されている。Flashメモリ13は、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0037】
CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからの車内確認信号Aが送信される。CPU11は当該車内確認信号Aに基づいて、変調部25に車内確認信号Bを送信する。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのインバータ動作指示信号が送信される。CPU11は、当該インバータ動作指示信号に基づいて、インバータ21を動作状態とする。そのため、復調部24にて復調された車載機1A、1B、1C、1Dからの信号に対して何ら処理が行われることがなく、そのまま変調部25にてFSK変調されて送信アンテナ19から送信させることが可能となる。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのインバータ不動作指示信号が送信され、当該インバータ不動作指示信号に基づいて、インバータ21を不動作状態とする。尚、CPU11のこれらの機能は、前述したFlashメモリ13から読み出されたプログラムデータの解読結果に基づいて、CPU11が当該プログラムを実行することによって実現される。CPU11は、Flashメモリ13のアドレスを指定するアドレスカウンタ(不図示)、Flashメモリ13から読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0038】
===位置検出システムの動作===
図1乃至図4を参照しつつ本発明に係る位置検出システム、位置検出通信装置、通信装置の動作について説明する。図2は、本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。図4は、モニタ92(表示部)の表示画面の一例を示す図である。
【0039】
尚、本実施形態においては、携帯機2の所持者(以下、携帯者という)が自動車のドアをアンロックして自動車に乗り込み携帯者が携帯機2を自動車内の何処かに置き、携帯者が携帯機2の位置を失念してしまった場合について説明する。また、インバータ21は不動作状態であるものとする。
【0040】
自動車内に別途設けられた制御部(不図示)は、自動車のドアが閉じられたことに基づく信号を受信する(S301)。制御部は、当該信号に基づいてエンジン始動を開始するか否かを確認するための信号をCPU90に送信する。
【0041】
そして、CPU90は、制御部からの当該信号に基づいて、CPU3A、3B、3C、3Dが車内確認信号Aを送信するための指示信号を車載機1A、1B、1C、1Dに送信する。
【0042】
以下、車載機1Aの動作について説明するが車載機1B、1C、1Dについても同様の動作であるものとする。
【0043】
CPU3Aは、CPU90からの前述した指示信号を受信すると、車内確認信号Aを送信部7Aに送信する(S302)。このとき、CPU3Aは、タイマ5Aをリセットする。リセットされたタイマ5Aは計時を開始する。そして、CPU3Aは、受信部8Aにて復調された携帯機2からの車内確認信号Bが、予め定められた時間内に送信されてくるか否かを判別する(S303)。送信部7Aは、当該車内確認信号Aを125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調された車内確認信号Aは送信アンテナ9Aを介して送信される。
【0044】
ASK変調された車内確認信号Aを携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された車内確認信号Aを復調する。そして、CPU11は、復調部24にて復調された車内確認信号Aが送信されたことを判別すると(S401・YES)、車内確認信号Bを変調部25に送信する(S402)。変調部25は、CPU11からの車内確認信号Bを312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された車内確認信号Bは、送信アンテナ19を介して送信される。
【0045】
FSK変調された車内確認信号Bを車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された車内確認信号Bを復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの車内確認信号Bが送信されたことを判別すると(S303・YES)、CPU90に確認信号を送信する(S320)。同様に、車載機1B、1C、1DのCPU3B、3C、3Dは、携帯機2からの車内確認信号Bが送信されたことを判別すると、確認信号をCPU90に送信する。尚、CPU3A、3B、3C、3Dは、車内確認信号Aを送信してから予め定められた時間内に受信部8A、8B、8C、8Dにて復調された車内確認信号Bが送信されてこないと判別した場合(S303・NO)、未確認信号をCPU90に送信する(S321)。
【0046】
CPU90は、車載機1A、1B、1C、1Dからの確認信号に基づいて、制御部(不図示)にエンジン始動許可信号を送信する(S304)。CPU90からの当該エンジン始動許可信号によって、例えば制御部は自動車のエンジンの駆動を開始させる。尚、CPU90は、車載機1A、1B、1C、1Dからの未確認信号に基づいて、制御部にエンジン始動不許可信号を制御部に送信する(S318)。そして、制御部は、キーが鍵穴に差し込まれるまで、自動車のエンジンの駆動を開始させないこととなる(S319)。
【0047】
例えば携帯者が携帯機2を自動車内の何処かに置き、携帯機2の位置を失念してしまった場合、携帯者は自動車内に設けられた入力部(不図示)に携帯機2を検出するための指示入力をする。制御部は、入力部に指示入力されたことに基づく指示信号を受信する。そして、制御部は、当該指示信号に基づいて検出信号をCPU90に送信する。CPU90は、制御部からの検出信号を受信すると(S305・YES)、CPU3A、3B、3C、3Dがインバータ動作指示信号を送信するための指示信号を車載機1A、1B、1C、1Dに送信する。
【0048】
CPU3Aは、CPU90からの前述した指示信号を受信すると、インバータ動作指示信号を送信部7Aに送信する(S306)。送信部7Aは、当該インバータ動作指示信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調されたインバータ動作指示信号は送信アンテナ9Aを介して送信される。
【0049】
ASK変調されたインバータ動作指示信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調されたインバータ動作指示信号を復調する。そして、CPU11は、復調部24にて復調されたインバータ動作指示信号が送信されたことを判別すると(S403・YES)、インバータ21を動作状態とする(S404)。
【0050】
また、CPU3Aは前述したインバータ動作指示信号を送信すると、距離算出用信号を送信部7Aに送信する(S307)。このときCPU3Aは、カウンタ4Aをリセットさせ、カウンタ4Aに当該距離算出用信号の立上りからカウントを開始させる。更に、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。そして、CPU3Aは、当該距離算出用信号が予め定められた時間内に携帯機2から返信されてくるか否かを判別する(S308)。送信部7Aは、当該距離算出用信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調された距離算出用信号は送信アンテナ9Aを介して送信される。
【0051】
ASK変調された距離算出用信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された距離算出用信号を復調する。このとき復調部24にて復調された車載機1Aからの距離算出用信号は、インバータ21が動作状態となっているため、そのまま変調部25に送信される(S406)。変調部25は、復調部24からの距離算出用信号を312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された距離算出用信号は、送信アンテナ19を介して送信される。
【0052】
FSK変調された距離算出用信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された距離算出用信号を復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号が送信されたことを判別すると(S308・YES)、カウンタ4Aのカウント値を読み出す。そして、CPU3Aは当該カウント値に基づいて、車載機1Aから携帯機2までの距離を算出する。尚、前述したように車載機1Aから携帯機2への通信においては、低周波数である125kHzの搬送波が用いられている。また、携帯機2から車載機1Aへの通信においては、高周波である312MHzの搬送波が用いられている。よって携帯機2から車載機1Aへの通信における位相差は、車載機1Aから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。そのためCPU3Aから送信部7Aに送信した距離算出用信号と受信部8Aにて復調された距離算出用信号とは、125kHzの低周波数を用いたことにより意図的な位相差が生じることとなる。よって、前述したCPU3Aが読み出した当該カウント値は、当該位相差を示していることとなる。そして、CPU3Aは、Flashメモリ6Aにテーブルデータとして記憶されている実験からもとめられた当該カウント値に対応する距離を読み出す。よって、CPU3は、当該位相差を示す当該カウント値を用いて、車載機1Aから携帯機2までの距離を算出することが可能となる。尚、本実施形態においては、カウンタ4Aのカウント値によって、車載機1Aから携帯機2までの距離を算出しているこれに限るものではない。例えば、CPU3Aは、CPU3Aから送信部7Aに距離算出用信号を送信させたときにタイマ5Aを計時させ、受信部8Aにて変調された携帯機2からの距離算出用信号が送信されたときのタイマ5Aが計時する時間を読み出す。そして、タイマ5Aが計時する当該時間を用いて車載機1Aから携帯機2までの距離を算出することも可能である。また、CPU3Aによる車載機1Aから携帯機2までの距離の算出は、1回に限るものでもない。例えば、複数回車載機1Aから携帯機2までの距離の算出を行って、より確実に車載機1Aから携帯機2までの距離を算出することも可能となる。尚、このときCPU3Aは、携帯機2からの距離算出用信号が返信されてくるまで、距離算出用信号を繰り返し送信するように設けても良い。そして、CPU3Aは算出した車載機1Aから携帯機2までの距離情報をCPU90に送信する(S310)。同様に、車載機1BのCPU3Bは、車載機1Bから携帯機2までの距離情報をCPU90に送信する(S311)。また、車載機1CのCPU3Cは、車載機1Cから携帯機2までの距離情報をCPU90に送信する(S312)。更に、車載機1DのCPU3Dは、車載機1Dから携帯機2までの距離情報をCPU90に送信する(S313)。また、CPU3Aは、車載機1Aから携帯機2までの距離を算出するとともにインバータ不動作指示信号を送信部7Aに送信する(S309)。送信部7Aは、当該インバータ不動作指示信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調されたインバータ不動作指示信号は送信アンテナ9Aを介して送信される。尚、CPU3Aは、距離算出用信号を送信してから予め定められた時間内に受信部8Aにて復調された距離算出用信号が返信されてこないと判別すると(S308・NO)、距離算出用信号が返信されてこないと判別した情報を、例えばFlashメモリ6Aのアドレス1から順に記憶させる。このときCPU3Aは、当該距離算出用信号が返信されてこないと判別した当該情報がアドレス2に記憶されている否かを判別する(S316)。そして、CPU3Aは、アドレス2に当該情報が記憶されていないと判別すると(S316・NO)、インバータ動作指示信号を再び送信部7Aに送信する(S306)。また、CPU3Aは前述したようにタイマ5Aをリセットさせて計時を開始させ、カウンタ4Aをリセットさせてカウントを開始させる。そして、CPU3Aは再び距離算出用信号が返信されてこないと判別すると(S308・NO)、距離算出用信号が返信されてこないと判別した情報を、例えばFlashメモリ6Aのアドレス2に記憶させる(S316)。そして、CPU3Aは、距離算出用信号が返信されてこないと判別した情報がアドレス2に記憶されていると判別すると(S316・YES)、当該判別に基づいた信号をCPU90に送信する。CPU90は、車載機1Aのみならず車載機1B、1C、1Dからの当該信号を受信すると、携帯機2が自動車内にないと判別する(S317)。そして、CPU90は、モニタ92に携帯機2が自動車内にないと表示させるべく指示信号を制御部(不図示)に送信する。制御部は、CPU90からの当該指示信号に基づいて、モニタ92に携帯機2が自動車内にないことを表示させる(S315)。
【0053】
前述したようにCPU90は、車載機1A、1B、1C、1Dからの前述した距離情報を受信すると、当該距離情報に基づいて携帯機2が自動車内の何処にあるかを検出する(S314)。尚、このときのCPU90による携帯機2の位置を検出は、前述したように車載機1Aを始点として当該始点からCPU3Aが算出した距離の点(図3・一点鎖線A)と、車載機1Bを始点として当該始点からCPU3Bが算出した距離の点(図3・二点鎖線B)と、車載機1Cを始点として当該始点からCPU3Cが算出した距離の点(図3・破線C)と、車載機1Dを始点として当該始点からCPU3Dが算出した距離の点(図3・実線D)とが一致する点から求められる。そして、CPU90は、検出した携帯機2の位置をモニタ92に表示させるべく指示信号を制御部に送信する。制御部は、CPU90からの指示信号に基づいてモニタ92に携帯機2の位置を表示させる(S315、図4)。
【0054】
このように、携帯者が携帯機2の位置を失念した場合、距離算出用信号によって各車載機1A、1B、1C、1Dから携帯機2までの距離を各CPU3A、3B、3C、3Dが算出することによって、携帯機2の位置をCPU90が検出することが可能となる。
【0055】
本実施形態によれば、車載機1Aから送信したときの距離算出用信号と、携帯機2からの距離算出用信号に応じた信号との位相差から、CPU3Aは、車載機1Aと携帯機2との間の距離を算出することが可能となる。また、車載機を複数設けることによって、CPU90は、CPU3A、3B、3C、3Dが算出した車載機1A、1B、1C、1Dと携帯機2との間の複数の距離に基づいて携帯機の位置を検出することが可能となる。
【0056】
また、車載機1A、1B、1C、1Dからの距離算出用信号をインバータ21にてそのまま返信することが可能となる。そのため、CPU3A、3B、3C、3Dは、送信部7A、7B、7C、7Dから送信した距離算出用信号と、携帯機2から返信された前記送信部7A、7B、7C、7Dから送信した距離算出用信号と同じ距離算出用信号と、から携帯機2との間の距離を算出しているので、正確な距離を確実に算出することが可能となる。
【0057】
また、車載機1A、1B、1C、1Dから携帯機2への通信において、低周波数の搬送波で通信を行うことによって位相差を意図的に生じさせることができる。また、携帯機2から車載機1A、1B、1C、1Dへの通信において、高周波の搬送波で通信を行うことによって、車載機1A、1B、1C、1Dから携帯機2への通信により生じた位相差に比べ無視できる程度の位相差とすることができる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信において意図的に生じさせた位相差によって、車載機1A、1B、1C、1Dから携帯機2までの距離を算出することが可能となる。
【0058】
また、CPU11にてインバータ21を動作状態とすることによって、距離算出用信号を車載機1A、1B、1C、1Dに返信することができ、CPU3A、3B、3C、3Dが携帯機2との間の距離を算出することが可能となる。更に、CPU11にてインバータ21を不動作状態とすることによって、以後車載機1A、1B、1C、1Dから送信される信号が、携帯機2からそのまま返信されることがなくなる。よって例えば車載機1A、1B、1C、1Dからの要求信号に応じて、所定の処理がなされた応答信号を携帯機2が送信することが可能となる。
【0059】
また、低周波数の搬送波で通信を行う車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波による変調に適したASK変調を用いることによって、送信部7A、7B、7C、7D及び復調部24の回路構成が容易となり、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となる。高周波数の搬送波で通信を行う携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波による変調に適したFSK変調を用いることによって、ノイズによる影響を受けにくくなり、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となる。
【0060】
また、車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信においてスペクトラム拡散にて通信を行うことにより、当該スペクトラム拡散にて送信された信号の秘匿性を高めることができ、また、妨害波・干渉波等に対する排除能力を著しく高めることができる。
【0061】
また、位相差を検出するためのタイマ5A、5B、5C、5Dと、所定周波数のクロックでカウントするカウンタ4A、4B、4C、4Dと、カウント値に基づいてCPU3A、3B、3C、3Dが携帯機2との間の距離を算出する基となるテーブルデータが記憶されているFlashメモリ6A、6B、6C、6Dとを用いて、CPU3A、3B、3C、3Dが携帯機2との距離を算出することを確実に行うことが可能となる。また、タイマ5A、5B、5C、5D及びカウンタ4A、4B、4C、4Dが、CPU3A、3B、3C、3Dが距離算出用信号を送信するごとにリセットされることにより、CPU3A、3B、3C、3Dが送信したときの距離算出用信号と、受信したときの前記CPU3A、3B、3C、3Dが送信した距離算出用信号と同じ距離算出用信号と、から携帯機2との間の距離を算出部が確実に算出することが可能となる。
【0062】
また、CPU3A、3B、3C、3Dにて算出した複数の距離に基づいてCPU11が検出した携帯機2の位置を自動車に設けられたモニタ92に表示させることが可能となる。そのため、携帯機2の位置を確実に知らせることが可能となる。
【0063】
===その他の実施の形態===
以上、本発明に係る位置検出システム、位置検出通信装置、通信装置における、携帯機2の位置の検出について説明したが、上記の説明は、本発明の理解を容易とするためのものであり、本発明を限定するものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得る。
【0064】
<<位置検出システム、位置検出通信装置、通信装置のその他の形態>>
本実施形態においては、自動車の前述した位置に車載機1A、1B、1C、1Dを設けているがこれに限るものではない。
【0065】
例えば、車載機1A、1B、1C、1Dが設けられた位置に、受信部8Aと受信アンテナ10A、受信部8Bと受信アンテナ10B、受信部8Cと受信アンテナ10C、受信部8Dと受信アンテナ10Dのみを設けても良い。その場合、車載機を例えば1つのみ設け、当該車載機にCPU3、送信部7、送信アンテナ9、OSC26、Flashメモリ6、タイマ5、カウンタ4を設ける。そして、前述したようにCPU3からの距離算出用信号が、送信部7を介して送信アンテナ9から送信される。CPU3は、携帯機2から返信される距離算出用信号を受信アンテナ10A、10B、10C、10Dを介して受信部8A、8B、8C、8Dが例えば受信した順に、当該距離算出用信号を受信した受信アンテナから携帯機2までの距離を算出する。そして、CPU90は、CPU3が算出した受信アンテナ10A、10B、10C、10Dから携帯機2までの各距離情報に基づいて携帯機2の位置を検出するように設けても良い。
【0066】
<<位置検出システム、位置検出通信装置、通信装置の適用>>
本実施形態では、位置検出システム、位置検出通信装置、通信装置をスマートイグニッション機能が搭載された自動車に用いているが、本発明の適用対象はこれに限るものではない。
【0067】
例えば携帯機2を貴重品に設けても良い。携帯機2が設けられた貴重品を失くした場合、車載機1A、1B、1C、1Dと同一の機能を有する探索機A、B、C、Dから距離算出用信号を送信させる。そして、貴重品に設けた携帯機2に探索機が近づくことによって、探索機A、B、C、Dからの距離算出用信号を携帯機2が返信する。携帯機2からの距離算出用信号が探索機A、B、C、Dに送信されてくることによって、探索機A、B、C、Dが携帯機2までの距離を算出することができる。そして、探索機A、B、C、Dが算出した携帯機2までの距離に基づいて、探索機A、B、C、Dを統括制御する例えば制御部が貴重品の位置を検出する。そして、別途設けられたモニタに貴重品の位置を表示することも可能である。
【0068】
また、居場所を特定する必要がある人(例えば園児又は老人。以下、被監視者という)に携帯機2を持たせ、車載機1A、1B、1C、1Dと同一の機能を有する監視装置A、B、C、Dを被監視者を監視する者(以下、監視者という)が管理する。そして、当該監視装置A、B、C、Dから車内確認信号Aと同一のエリア内確認信号Aを送信させる。仮に被監視者が通信可能範囲を出てしまった場合、当該被監視者が通信可能範囲を出る直前の監視装置A、B、C、Dが受信した車内確認信号Bと同一のエリア内確認信号Bに基づいて、被監視者が通信可能範囲を出た位置を監視者が容易に知ることが可能となる。なぜならば、監視装置は、エリア内確認信号Aを送信してから予め定められた時間内にエリア内確認信号Bが送信されてくるか否かを判別する。そのため、被監視者の最も近傍にある監視装置には、エリア内確認信号Bが最も早く送信されてくることとなる。よって、被監視者が通信可能範囲を出た位置が、当該被監視者の最も近傍にある監視装置によって判別することができる。そのため、監視者による被監視者の探索がより確実なものとなる。よって被監視者が通信可能範囲を出てしまったことによる事故を未然に防ぐことが可能となる。
【図面の簡単な説明】
【0069】
【図1】本発明に係る位置検出システム、位置検出通信装置、通信装置の全体構成の一例を示す図である。
【図2】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。
【図3】車載機1A、1B、1C、1Dによる携帯機2の検出を示す図である。
【図4】モニタ92の表示画面の一例を示す図である。
【符号の説明】
【0070】
1 車載機
2 携帯機
3、11、90 CPU
4 カウンタ
5 タイマ
6、13 Flashメモリ
7 送信部
8 受信部
9、19 送信アンテナ
10、18 受信アンテナ
14 DET
15 変調器
16、17 RF
20、21、22 インバータ
24 復調部
25 変調部
26 OSC
92 モニタ
【特許請求の範囲】
【請求項1】
複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、
前記複数の第1通信装置は、それぞれ、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記複数の第1通信装置の複数の前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、
ことを特徴とする位置検出システム。
【請求項2】
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号を返信する返信部を備え、
前記検出部は、
前記返信部にて返信された前記距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する、
ことを特徴とする請求項1に記載の位置検出システム。
【請求項3】
前記複数の第1通信装置は、それぞれ、
前記距離算出用信号を第1の周波数の搬送波で変調する第1変調部と、前記第2通信装置からの前記第1の周波数よりも高い第2の周波数の搬送波で変調された前記距離算出用信号を復調する第1復調部と、を有し、
前記第2通信装置は、
前記複数の第1通信装置からの前記第1変調部にて変調された前記距離算出用信号を復調する第2復調部と、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波で変調する第2変調部と、を有する、
ことを特徴とする請求項1又は請求項2に記載の位置検出システム。
【請求項4】
前記第2通信装置は、
前記距離算出用信号を返信すべく前記返信部を動作状態とする切替部を有し、
前記複数の第1通信装置は、
前記第2通信装置との間の距離を前記算出部にて算出すべく前記返信部を動作状態とするための切替信号を送信し、
前記切替部は、前記複数の第1通信装置からの前記切替信号に基づいて前記返信部を動作状態とする、
ことを特徴とする請求項2又は請求項3に記載の位置検出システム。
【請求項5】
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波でASK変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にてASK変調された前記距離算出用信号を復調し、
前記第2変調部は、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波でFSK変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にてFSK変調された前記距離算出用信号を復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項6】
前記複数の第1通信装置と前記第2通信装置との通信をスペクトラム拡散を用いて行うべく、
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波で1次変調した後、前記第1の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調し、
前記第2変調部は、前記第2復調部にて逆拡散して復調された前記距離算出用信号を前記第2の周波数の搬送波で1次変調した後、前記第2の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項7】
前記複数の第1通信装置は、それぞれ、
前記第1送信部が前記距離算出用信号を送信するごとにリセットされ、前記第2通信装置から返信された前記距離算出用信号を前記複数の第1通信装置が受信するまでの時間を計時するタイマと、
前記タイマがリセットされるごとにリセットされ、前記検出部にて検出された前記位相差を所定周波数のクロックでカウントするカウンタと、
前記カウンタのカウント値に基づいて、前記算出部が前記第2通信装置との間の距離を算出する基となる情報が記憶された記憶部と、を有し、
前記検出部は、
前記タイマが計時する前記時間を、送信したときの前記距離算出用信号と受信したときの前記距離算出用信号との前記位相差として検出し、
前記算出部は、
前記カウンタが前記位相差を前記所定周波数のクロックでカウントしたときのカウント値と、前記記憶部に記憶された情報とに基づいて、前記第2通信装置との間の距離を算出する、
ことを特徴とする請求項2乃至請求項6の何れかに記載の位置検出システム。
【請求項8】
前記複数の第1通信装置は自動車に設けられ、
前記位置検出部は、
前記第2通信装置の位置を表示すべく前記自動車に設けられた表示部に対し、前記複数の距離に基づいて検出した前記第2通信装置の位置を、前記表示部に表示させるための信号を供給する、
ことを特徴とする請求項1乃至請求項7の何れかに記載の位置検出システム。
【請求項9】
第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、
前記第1通信装置は、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、
前記検出部にて検出された前記複数の位相差に基づいて、前記第2通信装置との間の前記複数の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、
ことを特徴とする位置検出システム。
【請求項10】
複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムの位置検出方法であって、
前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、
前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、
前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、
前記複数の第1通装置にて算出された複数の距離に基づいて、前記第2通信装置の位置を検出する、
ことを特徴とする位置検出システムの位置検出方法。
【請求項11】
相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、
前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の通信装置を備え、
複数の前記算出部にて算出された複数の前記距離に基づいて、前記相手側通信装置の位置を検出する、
ことを特徴とする位置検出通信装置。
【請求項12】
距離を算出するための距離算出用信号を送信し、
返信されてきた前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、
前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、
当該複数の距離算出通信装置が算出した複数の距離に基づいて前記送信位置を検出する相手側通信装置、と通信可能であって、
前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、
ことを特徴とする通信装置。
【請求項1】
複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、
前記複数の第1通信装置は、それぞれ、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記複数の第1通信装置の複数の前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、
ことを特徴とする位置検出システム。
【請求項2】
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号を返信する返信部を備え、
前記検出部は、
前記返信部にて返信された前記距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する、
ことを特徴とする請求項1に記載の位置検出システム。
【請求項3】
前記複数の第1通信装置は、それぞれ、
前記距離算出用信号を第1の周波数の搬送波で変調する第1変調部と、前記第2通信装置からの前記第1の周波数よりも高い第2の周波数の搬送波で変調された前記距離算出用信号を復調する第1復調部と、を有し、
前記第2通信装置は、
前記複数の第1通信装置からの前記第1変調部にて変調された前記距離算出用信号を復調する第2復調部と、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波で変調する第2変調部と、を有する、
ことを特徴とする請求項1又は請求項2に記載の位置検出システム。
【請求項4】
前記第2通信装置は、
前記距離算出用信号を返信すべく前記返信部を動作状態とする切替部を有し、
前記複数の第1通信装置は、
前記第2通信装置との間の距離を前記算出部にて算出すべく前記返信部を動作状態とするための切替信号を送信し、
前記切替部は、前記複数の第1通信装置からの前記切替信号に基づいて前記返信部を動作状態とする、
ことを特徴とする請求項2又は請求項3に記載の位置検出システム。
【請求項5】
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波でASK変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にてASK変調された前記距離算出用信号を復調し、
前記第2変調部は、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波でFSK変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にてFSK変調された前記距離算出用信号を復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項6】
前記複数の第1通信装置と前記第2通信装置との通信をスペクトラム拡散を用いて行うべく、
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波で1次変調した後、前記第1の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調し、
前記第2変調部は、前記第2復調部にて逆拡散して復調された前記距離算出用信号を前記第2の周波数の搬送波で1次変調した後、前記第2の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項7】
前記複数の第1通信装置は、それぞれ、
前記第1送信部が前記距離算出用信号を送信するごとにリセットされ、前記第2通信装置から返信された前記距離算出用信号を前記複数の第1通信装置が受信するまでの時間を計時するタイマと、
前記タイマがリセットされるごとにリセットされ、前記検出部にて検出された前記位相差を所定周波数のクロックでカウントするカウンタと、
前記カウンタのカウント値に基づいて、前記算出部が前記第2通信装置との間の距離を算出する基となる情報が記憶された記憶部と、を有し、
前記検出部は、
前記タイマが計時する前記時間を、送信したときの前記距離算出用信号と受信したときの前記距離算出用信号との前記位相差として検出し、
前記算出部は、
前記カウンタが前記位相差を前記所定周波数のクロックでカウントしたときのカウント値と、前記記憶部に記憶された情報とに基づいて、前記第2通信装置との間の距離を算出する、
ことを特徴とする請求項2乃至請求項6の何れかに記載の位置検出システム。
【請求項8】
前記複数の第1通信装置は自動車に設けられ、
前記位置検出部は、
前記第2通信装置の位置を表示すべく前記自動車に設けられた表示部に対し、前記複数の距離に基づいて検出した前記第2通信装置の位置を、前記表示部に表示させるための信号を供給する、
ことを特徴とする請求項1乃至請求項7の何れかに記載の位置検出システム。
【請求項9】
第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムであって、
前記第1通信装置は、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、
前記検出部にて検出された前記複数の位相差に基づいて、前記第2通信装置との間の前記複数の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記算出部にて算出された前記複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出部を有する、
ことを特徴とする位置検出システム。
【請求項10】
複数の第1通信装置と第2通信装置との間の複数の距離に基づいて、前記第2通信装置の位置を検出する位置検出システムの位置検出方法であって、
前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、
前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、
前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、
前記複数の第1通装置にて算出された複数の距離に基づいて、前記第2通信装置の位置を検出する、
ことを特徴とする位置検出システムの位置検出方法。
【請求項11】
相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、
前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の通信装置を備え、
複数の前記算出部にて算出された複数の前記距離に基づいて、前記相手側通信装置の位置を検出する、
ことを特徴とする位置検出通信装置。
【請求項12】
距離を算出するための距離算出用信号を送信し、
返信されてきた前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、
前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、
当該複数の距離算出通信装置が算出した複数の距離に基づいて前記送信位置を検出する相手側通信装置、と通信可能であって、
前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、
ことを特徴とする通信装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−118888(P2006−118888A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2004−304759(P2004−304759)
【出願日】平成16年10月19日(2004.10.19)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願日】平成16年10月19日(2004.10.19)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]