
位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置
【課題】 複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【解決手段】 複数の第1通信装置はそれぞれ第2通信装置との距離を算出するための距離算出用信号を送信する第1送信部と送信したときの距離算出用信号と受信したときの距離算出用信号に応じた信号との位相差を検出する検出部と当該位相差に基づいて距離を算出する算出部とを備え、第2通信装置は距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離が予め定められた距離未満であるか否かを判別する判別部と、予め定められた距離以上であると判別部が判別したときの複数の距離に応じた中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【解決手段】 複数の第1通信装置はそれぞれ第2通信装置との距離を算出するための距離算出用信号を送信する第1送信部と送信したときの距離算出用信号と受信したときの距離算出用信号に応じた信号との位相差を検出する検出部と当該位相差に基づいて距離を算出する算出部とを備え、第2通信装置は距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離が予め定められた距離未満であるか否かを判別する判別部と、予め定められた距離以上であると判別部が判別したときの複数の距離に応じた中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置に関する。
【背景技術】
【0002】
近年、所定の処理を実行すべく相互に通信を行う通信装置として、例えばパッシブキーレスエントリーシステムを搭載した自動車における車載機と携帯機がある。
【0003】
以下、パッシブキーレスエントリーシステムを搭載した自動車における車載機と携帯機の通信について詳述する。車載機は、例えば自動車の運転席側のドアに設けられ、携帯機は、当該自動車の所有者(以下、携帯者という)が所持しているものとする。そして、携帯者は、自動車のエンジンを停止し、ドアを開けて車外に出たものとする。
【0004】
車載機は、車載機と携帯機の通信可能範囲(エリア)内に携帯機があるか否かを判別するための信号(以下、信号Aという)を送信する。携帯者が通信可能範囲内にいるときは、携帯機は車載機からの信号Aを受信し、当該信号Aに応じた信号Bを送信する。車載機は携帯機からの信号Bを受信すると、通信可能範囲内に携帯機があると判別する。尚、車載機からの信号Aの送信は所定の間隔で繰り返し行われる。
【0005】
仮に、携帯者が通信可能範囲外に出てしまった場合、携帯機は車載機からの信号Aを受信できなくなる。そのため、車載機は携帯機からの信号Aに応じた信号Bを受信しなくなる。車載機は、例えば携帯機からの信号Bを予め定められた時間受信しなくなると、自動車内部に別途設けられた制御部に当該自動車のドアをロックさせるための指示信号を送信する。制御部は、車載機からの当該指示信号に基づいて、自動車のドアをロックさせる。よって携帯者が自動車から離れ、携帯機が通信可能範囲外となると、自動車のドアはロックされることとなる。
【0006】
次に、一旦は通信可能範囲外に出た携帯者が、通信可能範囲内に戻ってきた場合、再び携帯機は車載機からの信号Aを受信する。そして、携帯機は信号Bを送信することとなる。車載機は携帯機からの信号Bを受信すると、携帯機が当該自動車に対応したものであるか否かを判別するため、例えば携帯機の情報を読み出すための読出信号を送信する。携帯機は、車載機からの読出信号に基づいて、携帯機情報を送信する。車載機は、携帯機からの携帯機情報に基づいて、携帯機が当該自動車に対応したものであるか否かを判別する。そして車載機は、携帯機が当該自動車に対応したものであると判別すると、前述した制御部に当該自動車のドアをアンロックさせるための指示信号を送信する。制御部は、車載機からの当該指示信号に基づいて、自動車のドアをアンロックさせる。
【0007】
このように、パッシブキーレスエントリーシステムが搭載された自動車においては、自動車のキー(鍵)を鍵穴に差し込むことなく、車載機と携帯機が通信を行うことにより、当該自動車のドアをロック又はアンロックさせることを可能としている。
【特許文献1】特開2000−198420号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、パッシブキーレスエントリーシステムが搭載された自動車の前述したような車載機と携帯機の通信において、いわゆるリレーアタックが行われた場合、当該自動車が窃盗される可能性があった。このリレーアタックとは、携帯者が通信可能範囲から出てしまうことにより本来であれば車載機と携帯機の通信ができなくなる状態であっても、中継機を用いることによって車載機と携帯機の通信を可能とさせ、自動車のドアをアンロックとさせて当該自動車を盗む窃盗手口のことをいう。
【0009】
以下、図9を用いてリレーアタックについて詳述する。図9は、中継機A、Bを介した車載機101と携帯機102の通信を示す図である。車載機101は、例えば運転席側のドアに設けられており、前述した信号Aを送信する。車載機101は、破線Cで示される通信範囲内において信号の送受信が可能である。携帯機102は、前述したように車載機101からの信号Aを受信すると、当該信号Aに応じた信号Bを送信する。尚、携帯機102は、破線Dで示される通信範囲内において信号の送受信が可能である。
【0010】
携帯者が通信可能範囲を出てしまうと、前述したように車載機101には携帯機102からの信号Aに応じた信号Bが送信されなくなり、制御部(不図示)は車載機101からの指示信号に基づいてドアをロックさせる。
【0011】
このとき、自動車を窃盗しようとする中継者X、Yがいるとする。中継者Xは、中継機Aを所持して車載機101を通信範囲C内に入れる。また、中継者Yは、中継機Bを所持して携帯者の傍に行き、中継機Bを携帯機102の通信範囲D内に入れる。中継者Xが所持する中継機Aは車載機101の通信範囲C内に入っているため信号Aを受信し、中継機Aは信号Aを検波し、増幅してから送信する。中継機Aは信号Aを増幅させることによって、車載機101の通信範囲Cよりも広い範囲で信号Aを送信可能としている。中継機Aにて増幅された信号Aを中継者Yが所持する中継機Bが受信すると、中継機Bは当該増幅された信号Aを検波して、例えば中継機Aが増幅する前のレベルの信号Aに減衰して送信する。このとき、中継機Bは携帯機102の通信範囲D内に入っているため、中継機Bにて減衰された信号Aを携帯機102が受信する。携帯機102は、車載機101からの信号Aが送信されてきたものとして、当該信号Aに応じた信号Bを送信する。信号Bを中継機Bが受信すると、中継機Bは信号Bを検波し、増幅してから送信する。中継機Bは、信号Bを増幅させることによって、携帯機102の通信範囲Dよりも広い範囲で信号Bを送信可能としている。中継機Bにて増幅された信号Bを中継機Aが受信すると、中継機Aは当該増幅された信号Bを検波して、例えば中継機Bが増幅する前のレベルの信号Bに減衰して送信する。このとき、前述したように中継機Aは車載機101の通信範囲C内に入っているため、中継機Aにて減衰された信号Bを車載機101が受信する。そのため車載機101は、信号Aに応じた信号Bを受信することにより、携帯機102が通信可能範囲内にあるものと判別する。そして、車載機101は、自動車のドアをアンロックさせるための前述した処理を行うこととなる。そして、アンロックされた自動車に例えば中継者Xが乗り込み、当該自動車が盗まれることとなる。
【0012】
このように、中継機A、Bが介在する車載機101と携帯機102の通信においては、車載機101が中継機A、Bを介して信号Bを受信することにより、携帯機102が通信可能範囲内にあると判別する可能性があった。そのため、車載機101は自動車のドアをアンロックさせるための指示信号を制御部に送信し、制御部は携帯者が通信可能範囲内にいないにもかかわらず、ドアをアンロックしてしまう可能性があった。
【0013】
そこで、本発明は、複数の第1通信装置(例えば複数の車載機)と第2通信装置(例えば携帯機)との間の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態にもかかわらず、複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置(例えば中継機)の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
前記課題を解決するための発明は、複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、前記複数の第1通信装置は、それぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【0015】
また、第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該第1通信装置と当該第2通信装置とが通信不能となった状態において、前記第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、前記第1通信装置は、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、前記検出部にて検出された前記複数の位相差に基づいて、前記第2通装置との間の前記複数の距離を算出する算出部と、を備え、前記第2通信装置は、前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【0016】
また、複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムの位置検出方法であって、前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別し、前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると判別したとき、このときの前記複数の距離に応じた前記中継装置の位置を検出する、ことを特徴とする。
【0017】
また、相手側通信装置との間の複数の距離が予め定められた距離以上となることによって当該相手側通信装置と通信不能となった状態において、前記相手側通信装置と通信可能とさせる中継装置の位置検出通信装置であって、前記相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の距離算出通信装置を備え、前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【0018】
また、通信装置は、距離を算出するための距離算出用信号を送信し、返信されてきた前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出し、前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、前記複数の距離算出通信装置にて算出された複数の距離が予め定められた距離以上となることによって、前記送信位置からの前記距離算出用信号に応じた信号を受信不能となった状態において、前記複数の距離算出通信装置に前記送信位置からの前記距離算出用信号に応じた信号を受信可能とさせる中継装置の位置を検出すべく、当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離未満であるか否かを判別し、当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離以上であると判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する、相手側通信装置と通信可能であって、前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、ことを特徴とする。
【発明の効果】
【0019】
本発明によれば、複数の第1通信装置と第2通信装置との間の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態にもかかわらず、複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0020】
本明細書および添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0021】
<<実施形態>>
===位置検出システム、位置検出通信装置、通信装置の全体構成===
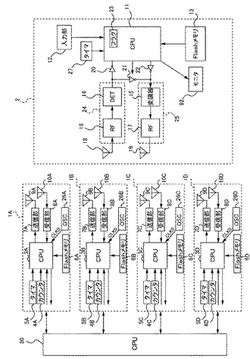
図1、図6を参照しつつ、本発明に係る位置検出システム、位置検出通信装置、通信装置について説明する。図1は、本発明に係る位置検出システム、位置検出通信装置、通信装置の全体構成の一例を示す機能ブロック図である。尚、本実施形態では位置検出システム、位置検出通信装置、通信装置は、例えば自動車のドアをキー操作せずにロック又はアンロックさせることが可能なパッシブキーレスエントリーシステムに用いるものとして説明する。そして、位置検出システムは、車載機1A、1B、1C、1D(複数の第1通信装置)、携帯機2(第2通信装置)、CPU(Central Processing Unit)90(判別部、位置検出部)から構成される。また、位置検出通信装置は車載機1A、1B、1C、1D(距離算出通信装置)、CPU90(判別部、位置検出部)から構成され、相手側通信装置は携帯機2に用いられるものとする。更に、通信装置は携帯機2に用いられ、相手側通信装置は車載機1A、1B、1C、1D(距離算出通信装置)、CPU90から構成される。図6は、車載機1A、1B、1C、1Dによる中継機Aの位置の検出を示す図である。尚、図6における+Y方向を自動車の前方方向とすると、例えば、車載機1Aは前方右側に設けられ、車載機1Bは前方左側に設けられ、車載機1Cは後方左側に設けられ、車載機1Dは後方右側に設けられるものとする。また、CPU90は、車載機1A、1B、1C、1Dが設けられた自動車内部に設けられるものとする。携帯機2は自動車のキー(鍵)に設けられているものとする。尚、本実施形態においては車載機を4つ設けているがこれに限るものではない。例えば、車載機をより多く設けて確実に中継機Aの位置を検出するよう設けても良い。
【0022】
尚、本実施形態では、車載機1A、1B、1C、1Dから携帯機2への信号の通信において、低周波数(例えば125kHz)の搬送波を用いることとする。また携帯機2から車載機1A、1B、1C、1Dへの信号の通信において、高周波数(例えば312MHz)の搬送波を用いることとする。即ち、車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波で通信が行われるため通信速度が遅くなる。逆に、携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波で通信が行われるため通信速度が速くなる。通信速度が遅い低周波数を用いているのは、後述するように車載機1A、1B、1C、1Dから信号を送信させた時間と当該信号が携帯機2を介して返信されてきた時間との信号の位相差(時間差でもよい)を意図的に生じさせるためである。また、携帯機2から車載機1A、1B、1C、1Dへの通信の場合、通信速度が速い高周波数を用いることによって、その間における位相差は車載機1A、1B、1C、1Dから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信における意図的に生じさせた位相差のみをもって、車載機1A、1B、1C、1Dと携帯機2の間の距離を算出することが可能となる。そのため、意図的な低周波数を車載機1A、1B、1C、1Dから携帯機2への通信に用い、さらに高周波数を携帯機2から車載機1A、1B、1C、1Dへの通信に用いている。
【0023】
更に、前述したような車載機1A、1B、1C、1Dから携帯機2への通信においては、ASK変調(振幅偏移変調:Amplitude Shift Keying)がなされた信号によって通信が行われる。何故ならば、車載機1A、1B、1C、1Dから携帯機2へ信号を送信するための送信部7A、7B、7C、7D(第1送信部、第1変調部)と、車載機1A、1B、1C、1Dからの信号を受信するための復調部24(第2復調部)の回路構成が容易で、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となるからである。また、携帯機2から車載機1A、1B、1C、1Dへの通信においては、FSK変調(周波数偏移変調:Frequency Shift Keying)がなされた信号によって通信が行われる。何故ならば、FSK変調がなされた信号は、ノイズによる影響を受けにくく、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となるからである。尚、本実施形態においては、車載機1A、1B、1C、1Dから携帯機2への通信においてASK変調された信号にて通信を行い、携帯機2から車載機1A、1B、1C、1Dへの通信においてFSK変調された信号にて通信を行っているがこれに限るものではない。例えば、信号の秘匿性を高めることができ、妨害波・干渉波に対する排除能力が著しく高いスペクトラム拡散にて車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信を行うことも可能である。
【0024】
CPU90は、車載機1A、1B、1C、1Dを統括制御する。
【0025】
車載機1Aは、CPU3A(検出部、算出部、生成部)、カウンタ4A、タイマ5A、Flashメモリ6A(記憶部)、送信部7A、受信部8A(第1復調部)、送信アンテナ9A、受信アンテナ10A、OSC26A(発振回路:Oscillator)を有している。
【0026】
送信部7Aは、CPU3Aからの信号を125kHzの周波数の搬送波でASK変調する。
【0027】
送信アンテナ9Aは、送信部7AにてASK変調された信号を送信する。
【0028】
受信アンテナ10Aは、携帯機2からのFSK変調された信号を受信する。
【0029】
受信部8Aは、受信アンテナ10Aが受信した携帯機2からのFSK変調された信号を復調する。
【0030】
CPU3Aは、車載機1Aを統括制御するために設けられている。Flashメモリ6Aには、CPU3Aが後述する処理を行うためのプログラムデータが予め記憶されている。また、Flashメモリ6Aには、CPU3Aが自動車のドアをアンロックするための処理を行う際、受信部8Aにて復調された携帯機2からのデータと照合を行うためのコード信号、個人データが予め記憶されている。更に、Flashメモリ6Aには、受信部8Aにて復調された携帯機2からの暗号化個人データ(CPU3Aによって前述した個人データと照合されるべく携帯機2のFlashメモリ13に記憶されている暗号化された個人データ)を解読するための暗号化解読プログラムが予め記憶されている。Flashメモリ6Aは、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0031】
タイマ5Aは、CPU3Aからの指示に基づいて時間を計時する。
【0032】
OSC26Aは、所定周波数のクロック(CLK0)をCPU3Aに送信する。
【0033】
カウンタ4Aは、CPU90からの指示に基づいて、CPU3Aから送信部7Aに送信される車載機1Aから携帯機2までの距離を算出するための信号(以下、距離算出用信号という)の立上りから、OSC26Aからのクロックの例えば立ち上がりをカウントする。そして、カウンタ4Aは、受信部8Aにて復調された距離算出用信号の立ち上がりまで、OSC26Aからのクロックの立ち上がりをカウントする。また、カウンタ4Aのカウント値は、CPU3Aからの指示に基づいてリセットされる。
【0034】
CPU3Aは、CPU90からの指示信号に基づいて、前述した距離算出用信号を送信部7Aに送信するとともにカウンタ4Aをリセットさせてカウントを開始させる。また、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号を受信すると、カウンタ4Aのカウント値を読み出す。CPU3Aは、当該カウント値を基に車載機1Aから携帯機2までの距離を算出する。つまり、距離算出用信号を送信部7Aに送信した時間から、携帯機2を介して距離算出用信号が返信されてきた時間までの両信号の位相差を示すカウント値が得られ、CPU3Aは車載機1Aから携帯機2までの距離を算出することができる。例えば、OSC26Aからのクロックの周波数が15.75kHzである場合、携帯機2を介して距離算出用信号が返信されてきたときのカウンタ4Aのカウント値が250となっていたとき、このときの位相差は約15.87(msec)となる。そして、位相差が約15.87(msec)のときの車載機1Aから携帯機2までの距離は約1(m)となることが、例えば実験からもとめられているものとする。この実験からもとめられたカウント値に対応した距離データは、例えばFlashメモリ6Aにテーブルデータとして予め記憶されている。CPU3Aは、算出した車載機1Aから携帯機2までの距離情報をCPU90に送信する。CPU3Aは、CPU90からの指示に基づいて、携帯機2のインバータ21(返信部)を不動作状態とするための信号(以下、識別信号という)を送信部7Aに送信する。また、CPU3Aは、Flashメモリ6Aに記憶されているコード信号に応じたコード信号を携帯機2から読み出すための信号(以下、コード読出信号という)を送信部7Aに送信する。CPU3Aは、受信部8Aにて復調された携帯機2からのコード信号が送信される。CPU3Aは、携帯機2からのコード信号とFlashメモリ6Aからのコード信号が所定の関係を有していると判別した場合、前述した暗号化個人データを読み出すための信号(以下、暗号化個人データ読出信号という)を送信部7Aに送信する。CPU3Aは、受信部8Aにて復調された携帯機2からの暗号化個人データが送信される。CPU3Aは、Flashメモリ6Aに記憶されている暗号化解読プログラムに基づいて、当該暗号化個人データの解読を行う。CPU3Aは、解読した個人データとFlashメモリ6Aからの個人データが一致すると判別した場合、自動車の何れのドア(例えば自動車の全てのドア又は運転席のドアの何れか)をアンロックするのかを確認するための信号(以下、入力確認信号という)を送信部7Aに送信する。CPU3Aには、受信部8Aにて復調された携帯機2からの入力確認信号に応じた入力信号が送信される。CPU3Aは、受信部8Aにて復調された携帯機2からの入力信号に基づいて、自動車のドアをアンロックするための指示信号を、CPU90に送信する。また、CPU3Aは、CPU90からの指示に基づいて携帯機2が通信可能範囲内あるか否かを判別するための信号(以下、エリア内確認信号Aという)を送信部7Aに送信する。このとき、CPU3Aは、タイマ5Aをリセットさせて、計時を開始させる。CPU3Aは、当該エリア内確認信号Aに対応する信号(以下、エリア内確認信号Bという)が、予め定められた時間内(図4・t1)に携帯機2から送信されてくるか否かを判別する。CPU3Aは、当該エリア内確認信号Bが予め定められた時間内に、携帯機2から送信されてこないと判別すると、自動車のドアをロックさせるための指示信号をCPU90に送信する。尚、CPU3Aのこれらの機能は、前述したFlashメモリ6Aから読み出されたプログラムデータの解読結果に基づいて、CPU3Aが当該プログラムを実行することによって実現される。CPU3Aは、Flashメモリ6Aのアドレスを指定するアドレスカウンタ(不図示)、Flashメモリ6Aから読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0035】
車載機1B、1C、1Dの構成は、前述した車載機1Aと同様の構成である。尚、車載機1A、1B、1C、1Dは、同時にCPU90からの指示に基づいて前述した処理を行っても良いし、順次前述した処理を行っても良い。
【0036】
CPU90は、自動車内に設けられた制御部(不図示)からの指示信号に基づいて、CPU3A、3B、3C、3Dが前述したエリア内確認信号Aを送信するための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車のドアをロックさせるための指示信号を受信すると制御部に自動車のドアをロックさせるべく指示信号を送信する。そして、CPU90は、CPU3A、3B、3C、3Dに車載機1A、1B、1C、1Dから携帯機2までの距離を算出させるための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、CPU3A、3B、3C、3Dが算出した車載機1A、1B、1C、1Dから携帯機2までの距離情報が送信される。CPU90は、前述した距離情報に基づいて、車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離未満(例えば1m)であるか否かを判別する。CPU90は、車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離以上であると判別すると、CPU3A、3B、3C、3Dが算出した距離情報に応じた携帯機2′の位置を検出する(図6参照)。尚、このときCPU90が車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離以上であると判別することによって、車載機1A、1B、1C、1Dと携帯機2との間には中継機A(中継装置)が介在していることとなる。何故ならば、車載機1A、1B、1C、1Dと携帯機2の間の距離が予め定められた距離未満であるということは、車載機1A、1B、1C、1Dと携帯機2は通信可能範囲内にあるということになる。そして、通信可能範囲外つまり車載機1A、1B、1C、1Dと携帯機2の間の距離が予め定められた距離以上となる場合は、本来車載機1A、1B、1C、1Dと携帯機2は通信不能となる。よって本来であれば車載機1A、1B、1C、1Dと携帯機2の間の距離が予め定められた距離以上となる距離は、CPU3A、3B、3C、3Dにて算出されるべき正当な距離ではないこととなる。つまり、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2との通信が行われていると判別することができる。そして、当該中継機Aの位置を検出すべく、CPU90は、前述したようにCPU3A、3B、3C、3Dが算出した距離情報に応じた携帯機2′の位置を検出する。このときの、CPU90による携帯機2′の位置の検出は、例えばCPU3A、3B、3C、3Dが算出した距離情報から読み出される各距離の一致点を用いることによって求めることができる。CPU90は、検出した携帯機2′の位置と車載機1A、1B、1C、1Dからなる範囲(以下、検出範囲という)を算出する。CPU90は、算出した検出範囲を示す信号(以下、検出信号という)を車載機1A、1B、1C、1Dに送信する。尚、本実施形態においては、検出範囲を示す検出信号のみを車載機1A、1B、1C、1Dに送信しているがこれに限るものではない。例えば、全地球測位システム(GPS:Global Positioning System)が搭載された自動車であれば、検出範囲とともに当該検出範囲の地図情報を示す信号を送信するように設けてもよい。そうすることによって、車載機1A、1B、1C、1Dを介して携帯機2の所持者(以下、携帯者という)に、より正確な中継機Aの位置を知らせることが可能となる。尚、CPU90は、車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離未満であると判別すると、CPU3A、3B、3C、3Dが前述した識別信号を送信するための指示信号を送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dからの前述した自動車のドアをアンロックさせるための指示信号を受信すると制御部に自動車のドアをアンロックさせるべく指示信号を送信する。CPU90のこれらの機能は、メモリ(不図示)から読み出されたプログラムデータの解読結果に基づいて、CPU90が当該プログラムデータを実行することによって実現される。CPU90は、メモリのアドレスを指定するアドレスカウンタ(不図示)、メモリから読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0037】
携帯機2は、CPU11、入力部12、Flashメモリ13、復調部24、変調部25(第2送信部、第2変調部)、受信アンテナ18、送信アンテナ19、インバータ20、21、22、フラグ23、タイマ27、モニタ92を有している。
【0038】
受信アンテナ18は、車載機1A、1B、1C、1DからのASK変調された信号を受信する。
【0039】
復調部24は、例えばRF16(Radio Frequency)、DET14(Detector)から構成されている。復調部24は、受信アンテナ18からのASK変調された信号を復調する。
【0040】
変調部25は、例えばRF17、変調器15から構成されている。変調部25は、CPU11からの信号を312MHzの周波数の搬送波でFSK変調する。また、変調部25は、CPU11の指示によってインバータ21が動作状態となっている場合、復調部24からの信号を312MHzの周波数の搬送波でFSK変調する。
【0041】
送信アンテナ19は、変調部25にてFSK変調された信号を送信する。
【0042】
CPU11は、携帯機2を統括制御するために設けられている。Flashメモリ13には、CPU11が後述する処理を行うためのプログラムデータが予め記憶されている。また、Flashメモリ13には、車載機1A、1B、1C、1Dからのコード読出信号に応じて、車載機1A、1B、1C、1Dに送信するためのコード信号が記憶されている。更に、Flashメモリ13には、車載機1A、1B、1C、1Dからの暗号化個人データ読出信号に基づいて、車載機1A、1B、1C、1Dに送信するための暗号化個人データが記憶されている。Flashメモリ13は、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0043】
タイマ27は、CPU11からの指示信号に基づいて計時する。
【0044】
入力部12は、例えば携帯者からの指示入力に基づく指示信号が入力される。例えば携帯者が運転席側のドアをアンロックしたい場合、運転席側のドアをアンロックするための指示入力を携帯者が行い、当該指示入力に基づく指示信号が入力部12に入力される。そして、入力部12は、当該運転席側のドアをアンロックするための当該指示信号が入力されると、フラグ23に例えば一方の論理値“1”を記憶させる。また、例えば携帯者が自動車の全てのドアをアンロックしたい場合、自動車の全てのドアをアンロックするための指示入力を携帯者が行い、当該指示入力に基づく指示信号が入力部12に入力される。そして、入力部12は、当該全てのドアをアンロックするための指示信号が入力されると、フラグ23に例えば他方の論理値“0”を記憶させる。尚、本実施形態では、例えばキー(鍵)に切替スイッチ(不図示)を設けさせ、携帯者が運転席側のドアをアンロックしたい場合は当該切替スイッチを一方側に切り替え、自動車の全てのドアをアンロックしたい場合は当該切替スイッチを他方側に切り替える。そして、入力部12には当該切替スイッチを一方側に切り替えることによって運転席側のドアをアンロックするための指示信号が入力され、入力部12はフラグ23に“1”を記憶させるものとして説明する。また、入力部12には当該切替スイッチを他方側に切り替えることによって全てのドアをアンロックするための指示信号が入力され、入力部12はフラグ23に“0”を記憶させるものとして説明する。
【0045】
CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのエリア内確認信号Aが送信され、変調部25にエリア内確認信号Bを送信する。このとき、CPU11は、タイマ27をリセットさせて計時を開始させる。CPU11は、予め定められた時間内(図4・t2)にエリア内確認信号Aが再び車載機1から送信されてくるか否かを判別する。CPU11は、エリア内確認信号Aが予め定められた時間内に送信されてこないと判別すると、インバータ21を動作状態とする。そのため、復調部24にて復調された車載機1A、1B、1C、1Dからの信号に対して何ら処理が行われることなく、そのまま変調部25にてFSK変調されて送信アンテナ19から送信させることが可能となる。CPU11は、復調部24にて復調されたCPU90から車載機1A、1B、1C、1Dを介して送信される前述した検出信号が送信される。CPU11は、当該検出信号に基づいて、モニタ92に検出範囲を表示させるべく表示信号をモニタ92に送信する。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからの識別信号が送信され、当該識別信号が送信されたと判別すると、インバータ21を不動作状態とする。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのコード読出信号が送信され、当該コード読出信号が送信されたと判別すると、Flashメモリ13からコード信号を読み出して、変調部25に送信する。CPU11は復調部24にて復調された車載機1A、1B、1C、1Dからの暗号化個人データ読出信号が送信され、当該個人データ読出信号が送信されたと判別すると、Flashメモリ13から暗号化個人データを読み出して、変調部25に送信する。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからの入力確認信号が送信される。CPU11は、当該入力確認信号に基づいて、このときのフラグ23に記憶されている“1”又は“0”の情報を入力信号として変調部25に送信する。尚、CPU11のこれらの機能は、前述したFlashメモリ13から読み出されたプログラムデータの解読結果に基づいて、CPU11が当該プログラムを実行することによって実現される。CPU11は、Flashメモリ13のアドレスを指定するアドレスカウンタ(不図示)、Flashメモリ13から読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0046】
モニタ92は、CPU11からの表示信号に基づいて、検出範囲を表示する。
【0047】
===位置検出システム、位置検出通信装置、通信装置の動作===
図1乃至図6を参照しつつ本発明に係る位置検出システム、位置検出通信装置、通信装置の動作について説明する。図2、図3は、本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。図4は、本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。図5は距離算出用信号の変化を示す図である。尚、図4においては、ハイレベルのとき左欄に記載されている信号が送信されたことを示している。実際においては、車載機1A、1B、1C、1Dから携帯機2に送信される信号は送信部7A、7B、7C、7DにてASK変調された信号であり、携帯機2から車載機1A、1B、1C、1Dに送信される信号は変調部25にてFSK変調された信号である。また、図4における左欄・車載機1A距離算出用信号の1発のハイレベルは便宜上、図5における左欄・距離算出用信号(送信)の波形を示すものとして説明する。
【0048】
尚、本実施形態においては、携帯者が自動車のエンジンをストップし、携帯機2を持って自動車を出てドアを閉じた場面から説明する。また、携帯機2のインバータ21は不動作状態であるものとする。
【0049】
以下、車載機1Aの動作について説明するが車載機1B、1C、1Dについても同様の動作であるものとする。
【0050】
自動車内に別途設けられた制御部(不図示)は、自動車のドアが閉じられたことに基づく信号を受信する。制御部は、当該信号に基づいてパッシブキーレスエントリーシステムを開始するための信号をCPU90に送信する。そして、CPU90は、当該パッシブキーレスエントリーシステムを開始するための信号を受信すると、CPU3Aがエリア内確認信号Aを送信するための指示信号を送信する。CPU3Aは、CPU90からの当該指示信号に基づいて、送信部7Aにエリア内確認信号Aを送信する(S101)。このとき、CPU3Aはタイマ5Aをリセットする。リセットされたタイマ5Aは計時を開始する。そして、CPU3Aは、受信部8Aにて復調された携帯機2からのエリア内確認信号Bが、予め定められた時間(t1)内に送信されてくるか否かを判別する(S102)。送信部7Aは、当該エリア内確認信号Aを125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調されたエリア内確認信号Aは、送信アンテナ9Aを介して送信される(図4・車載機1Aエリア内確認信号A)。
【0051】
ASK変調されたエリア内確認信号Aを携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調されたエリア内確認信号Aを復調する。そして、CPU11は、復調部24にて復調されたエリア内確認信号Aが送信されたことを判別すると(S201・YES)、エリア内確認信号Bを変調部25に送信する(S202)。このとき、CPU11はタイマ27をリセットする。リセットされたタイマ27は計時を開始する。そして、CPU11は、復調部24にて復調された車載機1Aからのエリア内確認信号Aが予め定められた時間(t2)内に再び送信されてくるか否かを判別する(S201)。変調部25は、CPU11からのエリア内確認信号Bを312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調されたエリア内確認信号Bは、送信アンテナ19を介して送信される(図4・携帯機2エリア内確認信号B)。
【0052】
FSK変調されたエリア内確認信号Bを車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調されたエリア内確認信号Bを復調する。CPU3Aは、受信部8Aにて復調された携帯機2からのエリア内確認信号Bが送信されたことを判別すると(S102・YES)、エリア内確認信号Aを再び送信部7Aに送信する(S101)。
【0053】
このように車載機1Aからのエリア内確認信号Aを携帯機2が受信可能な通信可能範囲に携帯者がいれば、携帯機2からのエリア内確認信号Bを車載機1Aが受信することが可能となる(図4・エリア内)。そのため車載機1Aは携帯者が近傍(つまり通信可能範囲内)にいるか否かを判別することが可能となる。
【0054】
次に、携帯者が、前述した通信可能範囲を出てしまった場合(図4・エリア外)について説明する。
【0055】
携帯者が通信可能範囲を出てしまうと、車載機1Aからのエリア内確認信号Aを携帯機2が受信できなくなり、そのため携帯機2からのエリア内確認信号Bが車載機1Aに送信されなくなる。CPU3Aは、エリア内確認信号Aを送信してから予め定められた時間(t1)経過しても携帯機2からのエリア内確認信号Bが送信されてこないと判別すると(S102・NO)、自動車のドアをロックさせるための指示信号をCPU90に送信する。尚、この場合、CPU3Aは、複数回(例えば2回)エリア内確認信号Aを送信部7Aに送信するように設定しても良い(図4参照)。そして、当該複数回のエリア内確認信号Aうちの何れの送信に対しても、携帯機2からエリア内確認信号Bが送信されないとCPU3Aが判別した場合、自動車のドアをロックさせるための指示信号をCPU90に送信させるようにしても良い。そうすれば、より確実に携帯者が通信可能範囲内にいないことをCPU3Aが判別することできる。更に、携帯者が一旦は通信可能範囲外に出たが直ぐに通信可能範囲内に戻ってきた場合において、ドアをロックするための処理を行わずに済むことが可能となる。そのため、ドアをアンロックさせるための処理に要する時間が必要なくなり、ドアがアンロックされるまでの当該処理に要する時間の遅れを解消することが可能となる。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車のドアをロックするための指示信号を受信すると、前述した制御部(不図示)に自動車のドアをロックさせるべく指示信号を送信する(S103)。CPU90からの当該指示信号を受信した制御部は、当該指示信号に基づいて自動車のドアをロックさせる(図4・ドア閉)。またCPU3Aは、前述したように自動車のドアをロックさせるための指示信号をCPU90に送信すると、距離算出用信号(図5・距離算出用信号(送信))を送信部7Aに送信する(S104)。このとき、CPU3Aは、カウンタ4Aをリセットさせ、カウンタ4Aに当該距離算出用信号の立上りからカウントを開始させる。更に、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。そして、CPU3Aは、当該距離算出用信号が予め定められた時間(t3)内に携帯機2から返信されてくるか否かを判別する(S105)。送信部7Aは、当該距離算出用信号を125kHzの周波数の搬送波でASK変調する(図5・ASK(1))。そして、送信部7AにてASK変調された距離算出用信号は、送信アンテナ9Aを介して送信される(図4・車載機1A距離算出用信号)。このときCPU3Aは、距離算出用信号を送信してから前述した予め定められた時間(t3)内に受信部8Aにて復調された距離算出用信号が返信されてこないと判別すると、再び距離算出用信号を送信する。また、前述したようにタイマ5Aをリセットさせて計時を開始させ、カウンタ5Aをリセットさせてカウントを開始させる。尚、この距離算出用信号は、図5に示す波形(距離算出用信号(送信))に限るものではない。セキュリティーを高めるために、例えばCPU3Aから送信する都度信号の内容を変えても良いし(つまり距離算出用信号を示す波形が変わる)、一定時間ごとに信号の内容を変えても良い。
【0056】
CPU11は、エリア内確認信号Aが予め定められた期間(t2)送信されないと判別すると、インバータ21を動作状態とする(S203。図4・インバータ21)。
【0057】
このように携帯者が車載機1Aからのエリア内確認信号Aを受信可能な通信可能範囲から出てしまうと、自動車のドアがロックされることとなる。
【0058】
例えば携帯者が通信可能範囲を出て、自動車を視認できない距離まで離れたとき、中継者X(不図示)が自動車と携帯者の間に行き、車載機1Aの通信圏内(図6・2点鎖線の円)、車載機1Cの通信圏内(図6・破線の円)、車載機1Dの通信圏内(図6・実線の円)、携帯機2の通信圏内(不図示)に中継機Aの通信圏内(図6・実線の円E)を交わるように中継機Aを設ける。そうすることによって、中継機Aは、車載機1A、1C、1D、携帯機2からの信号を受信することが可能となる。そして、中継者Xは、当該自動車の盗難を企むものとする(リレーアタックが行われる)。尚、車載機1Bの通信圏内(図6・一点鎖線の円)は、中継機Aの通信圏内(図6・実線の円E)とは交わっていないので、車載機1Bからの信号は携帯機2には送信されないこととなる。
【0059】
以下、車載機1Aと中継機Aとの動作について説明するが、車載機1C、1Dについても同様の動作であるものとする。
【0060】
車載機1Aと通信可能な中継機Aは、車載機1Aからの距離算出用信号を受信すると、当該距離算出用信号を検波して増幅する(図5・ASK(2))。そして、中継機Aは、距離算出用信号ASK(2)を送信する。このとき中継機Aから送信された距離算出用信号ASK(2)の通信距離は、車載機1Aからの距離算出用信号ASK(1)の通常通信距離に比べ、中継機Aにて増幅されているため、より遠距離までの通信が可能となっている。つまり、中継機Aは、車載機1Aからの距離算出用信号を携帯機2に受信させるべく前述した処理を行っている。
【0061】
そのため、中継機Aからの増幅された距離算出用信号ASK(3)を携帯機2の受信アンテナ18が受信することとなる。尚、車載機1Aから携帯機2への通信は前述したように低周波数である125kHzの搬送波で通信が行われているため、受信アンテナ18が受信する距離算出用信号ASK(3)は、図5に示すとおり位相差T3が生じることとなる。復調部24は、距離算出用信号ASK(3)を復調する。このとき復調部24にて復調された中継機Aからの距離算出用信号は、インバータ21が動作状態となっているため、そのまま変調部25に送信される(S205)。変調部25は、復調部24からの距離算出用信号を312MHzの周波数の搬送波でFSK変調する(図5・FSK(1))。変調部25にてFSK変調された距離算出用信号FSK(1)は、送信アンテナ19を介して送信される(図4・携帯機2距離算出用信号)。
【0062】
そして、前述したように携帯機2と通信可能な中継機Aは、FSK変調された携帯機2からの距離算出用信号FSK(1)を受信する。中継機AはFSK変調された距離算出用信号FSK(1)を検波して増幅する(図5・FSK(2))。そして、中継機Aは、距離算出用信号FSK(2)を送信する。このとき中継機Aから送信された距離算出用信号FSK(2)の通信距離は、携帯機2からの距離算出用信号FSK(1)の通常通信距離に比べ、中継機Aにて増幅されているため、より遠距離までの通信が可能となっている。
【0063】
そして、中継機Aからの増幅された距離算出用信号FSK(3)を車載機1Aの受信アンテナ10Aが受信する。受信部8Aは、距離算出用信号FSK(3)を復調する(図5・距離算出用信号(受信))。CPU3Aは、受信部8Aにて復調された距離算出用信号が送信されたことを判別すると(S105・YES)、カウンタ4Aのカウント値を読み出す。そして、当該カウント値に基づいて、車載機1Aから携帯機2までの距離を算出する。尚、前述したように中継機Aは、車載機1Aから送信された距離算出用信号ASK(1)を増幅するために、当該距離算出用信号ASK(1)を一旦検波してから増幅を行わなければならない。また、車載機1Aから携帯機2への通信においては、125kHzの周波数の搬送波でASK変調して通信を行っている。そのため距離算出用信号ASK(1)の1周期は、携帯機2から送信される距離算出用信号FSK(1)と比べて長くなっている。つまり、中継機Aは、1周期が長い距離算出用信号ASK(1)を一旦検波してから増幅するため、距離算出用信号ASK(1)と距離算出用信号ASK(2)には位相差T2(図5)が生じることとなる。更に、前述したように車載機1Aから携帯機2への通信においては、低周波数である125kHzの搬送波が用いられている。また、携帯機2から車載機1Aへの通信においては、高周波である312MHzの搬送波が用いられている。よって携帯機2から車載機1Aへの通信における位相差は、車載機1Aから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。そのためCPU3Aから送信部7Aに送信した距離算出用信号と受信部8Aにて復調された距離算出用信号とは、125kHzの低周波数を用いたことにより意図的な位相差T3(図5)が生じることとなる。つまり、CPU3Aが送信部7Aに送信した距離算出用信号(送信)と、受信部8Aにて復調された距離算出用信号(受信)との位相差はT4(T2+T3)となる。よって、前述したCPU3Aが読み出した当該カウント値は、当該位相差T4を示していることとなる。そして、CPU3Aは、当該カウント値を用いて車載機1Aから携帯機2までの距離を算出することとなる。CPU3Aは、Flashメモリ6Aにテーブルデータとして記憶されている実験からもとめられた当該カウント値に対応する距離を読み出す。よって、CPU3Aは、当該位相差T4を示す当該カウント値を用いて、車載機1Aから携帯機2までの距離を算出することが可能となる。CPU3Aは、算出した車載機1Aから携帯機2までの距離を示す距離情報をCPU90に送信する(S106)。同様に、CPU3Cは、算出した車載機1Cから携帯機2までの距離を示す距離情報をCPU90に送信する(S108)。また、CPU3Dは、算出した車載機1Dから携帯機2までの距離を示す距離情報をCPU90に送信する(S109)。尚、本実施形態においては、カウンタ4Aのカウント値によって、車載機1Aから携帯機2までの距離を算出しているがこれに限るものではない。例えば、CPU3Aは、CPU3Aから送信部7Aに距離算出用信号を送信させたときにタイマ5Aを計時させ、受信部8Aにて復調された携帯機2からの距離算出用信号が送信されたときのタイマ5Aが計時する時間を読み出す。そして、タイマ5Aが計時する当該時間を用いて車載機1Aから携帯機2までの距離を算出することも可能である。
【0064】
CPU90は、車載機1A、1C、1Dからの距離情報に基づいて、携帯機2が車載機1A、1C、1Dから予め定められた距離(例えば1m)未満にあるか否かを判別する(S110)。このときのCPU90は、携帯機2が車載機1A、1C、1Dから予め定められた距離未満にはないと判別することとなる(S110・NO)。何故ならば、前述したように中継機Aを介することによって、本来生じることの無いはずの位相差T2が生じているためである。そのため、CPU3Aが車載機1Aから携帯機2までの距離を算出するために用いる位相差T4を示すカウント値は、中継機Aが介在しない場合の位相差T3を示すカウント値に比べ多い値となっている。つまり、CPU3Aが位相差T4を示すカウント値に基づいて算出した車載機1Aから携帯機2までの距離は、位相差T3を示すカウント値に基づいて算出した距離に比べ長い距離となる。そのため、CPU90は、携帯機2が車載機1Aから予め定められた距離未満ではないと判別することとなる。同様に、CPU90は、携帯機2が車載機1Cから予め定められた距離未満ではないと判別することとなる。また、CPU90は、携帯機2が車載機1Dからあらかじめ定められた距離未満ではないと判別することとなる。尚、CPU90によるによる車載機1A、1C、1Dから携帯機2までの距離の判別は、1回に限るものでもない。例えば、複数回(図4においては3回)車載機1A、1C、1Dから携帯機2までの距離の判別を行うことも可能である。そうすることによって、より確実に車載機1A、1C、1Dから携帯機2までの距離を判別することが可能となる。
【0065】
携帯機2が車載機1A、1C、1Dから予め定められた距離未満にはないと判別したCPU90は、タイマ(不図示)の計時が所定時間(t4)に達しているか否かを判別する(S111)。CPU90は、タイマの計時が所定時間(t4)達していないと判別した場合(S111・NO)、車載機1A、1C、1Dからの距離情報に応じた携帯機2′の位置を検出する。そのためCPU90は、CPU3A、3C、3Dが算出した各距離の一致点を検出する(S112)。このCPU3A、3C、3Dが算出した各距離の一致点は、図6に示すとおり本来の携帯機2がある位置を示すものでなく、CPU3A、3C、3Dが算出した各距離に基づく携帯機2′の位置を示すものとなる。以下、携帯機2′の位置の検出について詳述すると、例えば実際の車載機1Aから中継機Aまでの距離をa(図6・2点鎖線の直線)、中継機Aから携帯機2までの距離をe(図6・実線の直線)とすると、CPU3Aが算出した車載機1Aから携帯機2までの距離は、a+eに応じた値Bとなる。また、実際の車載機1Cから中継機Aまでの距離をc(図6・破線の直線)とすると、CPU3Cが算出した車載機1Cから携帯機2までの距離はc+eに応じた値Cとなる。また、実際の車載機1Dから中継機Aまでの距離をd(図6・実線の直線)とすると、CPU3Dが算出した車載機1Dから携帯機2までの距離はd+eに応じた値Dとなる。図6で示すとおり中継機Aから車載機1A、1C、1Dまでのうち、最も中継機Aに近い車載機は車載機1Dである。つまり、車載機1Dから送信される距離算出用信号が、中継機Aを介して、携帯機2から最も早く車載機1Dに返信されることとなる。そのため、車載機1Dと携帯機2との通信による位相差が小さくなり、CPU3Dが算出する車載機1Dから携帯機2までの距離Dは、CPU3A、3Cが算出した距離B、Cよりも短い値となる。そのため、CPU3A、3C、3Dが算出した各距離に基づく携帯機2′の位置は、図6に示すとおり車載機1Dから最も近い距離となる。そして、CPU90は、携帯機2′と自動車間であってCPU3A、3Cが算出した距離A、Cに囲まれた範囲を検出範囲として算出する(S113)。尚このとき、CPU90は、例えば全地球測位システム(GPS)によって携帯機2′の検出範囲の地図情報を算出するように設けても良い。そして、CPU90は、算出した携帯機2′の検出範囲とともに、当該検出範囲の地図情報を加えた検出信号を車載機1A、1B、1C、1Dに送信するように設けても良い。以下、本実施形態において、CPU90は、算出した検出範囲とともに携帯機2′の地図情報を示す検出信号を送信するものとして説明する。
【0066】
CPU90は、携帯機2′の検出範囲及び地図情報を算出すると、CPU3A、3B、3C、3Dに識別信号を送信させるための指示信号を送信する。以下、車載機1Aの動作について説明するが車載機1B、1C、1Dも動作も同様である。但し、前述したように車載機1Bの通信圏内(図6・一点鎖線の円)は、中継機Aの通信圏内(図6・実線の円E)とは交わっていないので、車載機1Bからの信号は携帯機2には送信されないこととなる。CPU3Aは、CPU90からの当該指示信号を受信すると、送信部7Aに識別信号を送信する(S114)。送信部7Aは、当該識別信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調された識別信号は、送信アンテナ9Aを介して送信される。尚、当該識別信号も前述したように、中継機Aにて検波され増幅されて携帯機2に送信されることとなる。
【0067】
中継機Aにて増幅された識別信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された識別信号を復調する。CPU11は、復調部24にて復調された車載機1Aからの識別信号が受信されたことを判別すると(S206・YES)、インバータ21を不動作状態とする(S207。図4車載機1A識別信号)。
【0068】
次に、CPU90は、算出した携帯機2′の検出範囲及び当該検出範囲の地図情報を示す検出信号を車載機1A、1B、1C、1Dに送信する。CPU3Aは、CPU90からの検出信号を受信すると、送信部7Aに検出信号を送信する(S115)。送信部7Aは、CPU90からの当該検出信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された検出信号は、送信アンテナ9Aを介して送信される。尚、当該検出信号も前述したように、中継機Aにて検波され増幅されて携帯機2に送信されることとなる。
【0069】
中継機Aにて増幅された検出信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された検出信号を復調する。CPU11は、復調部24にて復調された車載機1Aからの検出信号が受信されたことを判別すると(S208・YES)、当該検出信号に基づいて、モニタ92に携帯機2′の検出範囲、地図情報を表示させるべく表示信号をモニタ92に送信する。CPU11からの当該表示信号を受信したモニタ92は、当該表示信号に応じた携帯機2′の検出範囲、地図情報を表示する。
【0070】
このように、携帯者に携帯機2′の検出範囲、地図情報を知らせることが可能となる。このとき携帯者は、モニタ92に表示された携帯機2′の検出範囲、地図情報によって、中継機Aの位置を予測することが可能となり、また、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2の通信が行われていることを知ることが可能となる。よって、当該車載機1A、1B、1C、1Dが搭載された自動車の中継者Xによる盗難を防ぐことが可能となる。また、本実施形態によれば、車載機1A、1B、1C、1Dに対する携帯機2′の位置によって中継機Aか介在している方向を、少なくとも携帯者は知ることが可能となる。尚、本実施形態においては、車載機を4つ設けているがこれに限るものでもない。例えば、少なくとも中継機Aと通信可能となる車載機を3つ設けることによって、携帯機2と当該3つ設けられた車載機との距離算出することによって携帯機2′の検出範囲を算出することが可能となる。最小限の数の車載機を用いることによって、不必要な車載機を自動車に設ける必要がなくなり車載機の製造・設置によるコストを軽減でき、またCPU90の前述した処理を軽減することが可能となる。
【0071】
尚、検出信号を車載機1A、1B、1C、1Dに送信したCPU90は、再び距離算出用信号を車載機1A、1B、1C、1Dから送信させるべく指示信号を送信する。以下、車載機1Aについて説明するが車載機1B、1C、1Dも同様であるものとする。CPU3Aは、当該指示信号に基づいて距離判別信号を再び送信する。このとき、CPU3Aは、カウンタ4Aをリセットさせ、カウンタ4Aに当該距離算出用信号の立上りからカウントを開始させる。尚、CPU3Aが再び距離算出用信号を送信部7Aに送信しているのは、CPU3Aによる車載機1Aから携帯機2までの距離の算出をより確実にするためである。そして、CPU90は、予め定められた距離未満であると判別することなく(S110・NO)所定時間(t4)が達したと判別すると(S111・YES)、携帯機2との通信をストップする(S116)。尚、本実施形態においては、CPU90が予め定められた距離未満でないと判別することなく所定時間が達したと判別した場合、携帯機2との通信をストップしているがこれに限るものではない。例えば、携帯機2に警報を発するための警報部(不図示)を設ける。そして、CPU90は、予め定められた距離未満でないと判別した場合、車載機1A、1B、1C、1Dに当該警報部が警報を発するための警報信号を送信するための指示信号を送信する。そして、中継機Aを介して携帯機2に送信された当該警報信号に基づいて、警報部が警報を発するように設けても良い。そうすれば、携帯者は中継者Xが介在していることを知ることができ、セキュリティー面を向上させることが可能となる。尚、携帯者が再び通信可能範囲に戻ってきても、前述したように車載機1A、1B、1C、1Dは携帯機2との通信をストップしているためドアはアンロックされない。この場合、携帯者はキーを鍵穴に差し込むことによりドアをアンロックする。その際、制御部(不図示)は、キーが鍵穴に差し込まれたことによりドアがアンロックされたことに基づく信号を受信する。制御部は、当該信号に基づいて、車載機1A、1B、1C、1Dが携帯機2との通信を開始するための指示信号をCPU90に送信する。CPU90は、当該指示信号を受信すると、車載機1A、1B、1C、1Dに通信開始指示信号を送信する。CPU90からの通信開始指示信号を受信したCPU3A、3B、3C、3Dは(S117・YES)、当該通信開始指示信号に基づいて、再び携帯機2との通信を開始する。
【0072】
以下、図1乃至図8を参照しつつ中継機Aが介在していない場合であって、通信可能範囲を出てしまった携帯者が再び通信可能範囲内に戻ってきた場合の上述した位置検出システム、位置検出通信装置、通信装置の動作について説明する。図7は、本発明に係る位置検出システム、位置検出装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。図8は、距離算出用信号の変化を示す図である。尚、図7においては、ハイレベルのとき左欄に記載されている信号が送信されたことを示している。実際においては、車載機1A、1B、1C、1Dから携帯機2に送信される信号は送信部7A、7B、7C、7DにてASK変調された信号であり、携帯機2から車載機1A、1B、1C、1Dに送信される信号は変調部25にてFSK変調された信号である。また、図7における左欄・車載機1A距離算出用信号の1発のハイレベルは便宜上、図8における左欄・距離算出用信号(送信)の波形を示すものとして説明する。
【0073】
尚、携帯者が通信可能範囲を出てしまって、自動車のドアがロックされるまでは上述したとおりである。また、車載機1Aの動作について説明するが車載機1B、1C、1Dについても同様の動作であるものとする。
【0074】
携帯者が、通信可能範囲内に戻ってくると(図7・右のエリア内)、車載機1AからのASK変調された距離算出用信号(図8・ASK)を携帯機2の受信アンテナ18が受信する。復調部24は、ASK変調された距離算出用信号を復調する。このとき復調部24にて復調された車載機1Aからの距離算出用信号は、インバータ21が動作状態となっているため、そのまま変調部25に送信される(S205)。変調部25は、復調部24からの距離算出用信号を312MHzの周波数の搬送波でFSK変調する(図5・FSK)。変調部25にてFSK変調された距離算出用信号は、送信アンテナ19を介して送信される(図7・携帯機2距離算出用信号)。
【0075】
FSK変調された距離算出用信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された距離算出用信号を復調する(図8・距離算出用信号(受信))。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号が送信されたことを判別すると(S105・YES)、カウンタ4Aのカウント値を読み出す。そして、CPU3Aは当該カウント値に基づいて、車載機1Aから携帯機2までの距離を算出する。尚、前述したように車載機1Aから携帯機2への通信においては、低周波数である125kHzの搬送波が用いられている。また、携帯機2から車載機1Aへの通信においては、高周波である312MHzの搬送波が用いられている。よって携帯機2から車載機1Aへの通信における位相差は、車載機1Aから携帯機2への通信の際生じる位相差に比べ無視できる程度なる。そのためCPU3Aから送信部7Aに送信した距離算出用信号と受信部8Aにて復調された距離算出用信号とは、125kHzの低周波数を用いたことにより意図的な位相差T1(図8)が生じることとなる。よって、前述したCPU3Aが読み出した当該カウント値は、当該位相差T1を示していることとなる。そして、CPU3Aは、Flashメモリ6Aにテーブルデータとして記憶されている実験からもとめられた当該カウント値に対応する距離を読み出す。よって、CPU3は、当該位相差T1を示す当該カウント値を用いて、車載機1Aから携帯機2までの距離を算出することが可能となる。そして、CPU3Aは、算出した車載機1Aから携帯機2までの距離を示す距離情報をCPU90に送信する(S106)。同様に、CPU3Bは、算出した車載機1Bから携帯機2までの距離を示す距離情報をCPU90に送信する(S107)。同様に、CPU3Cは、算出した車載機1Cから携帯機2までの距離を示す距離情報をCPU90に送信する(S108)。また、CPU3Dは、算出した車載機1Dから携帯機2までの距離を示す距離情報をCPU90に送信する(S109)。
【0076】
CPU90は、車載機1A、1B、1C、1Dからの距離情報に基づいて、携帯機2が車載機1A、1B、1C、1Dから予め定められた距離未満にあるか否かを判別する(S110)。この場合、車載機1A、1B、1C、1Dと携帯機2との通信において中継機Aが介在されていないので、CPU90は携帯機2が車載機1A、1B、1C、1Dから予め定められた距離未満にあると判別することとなる(S110・YES)。そして、CPU90は、CPU3A、3B、3C、3Dに識別信号を送信させるための指示信号を送信する。CPU3Aは、CPU90からの当該指示信号を受信すると、送信部7Aに識別信号を送信する(S118)。送信部7Aは、当該識別信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された識別信号は、送信アンテナ9Aを介して送信される(図7・車載機1A識別信号)。
【0077】
ASK変調された識別信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された識別信号を復調する。CPU11は、復調部24にて復調された車載機1Aからの識別信号が送信されたことを判別すると(S206・YES)、インバータ21を不動作状態とする(S207。図7・インバータ21)。
【0078】
次に、車載機1AのCPU3Aは、送信部7Aにコード読出信号を送信する(S119)。そして、CPU3Aは、受信部8Aにて復調された携帯機2からのコード信号が送信されてくるか否かを判別する(S120)。送信部7Aは、当該コード読出信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調されたコード読出信号は、送信アンテナ9Aを介して送信される(図7・車載機1Aコード読出信号)。
【0079】
ASK変調されたコード読出信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調されたコード読出信号を復調する。CPU11は、復調部24にて復調された車載機1Aからのコード読出信号が送信されたことを判別すると(S210・YES)、Flashメモリ13からコード信号を読み出す。そして、CPU11は、変調部25に当該コード信号を送信する(S211)。変調部25は、CPU11からのコード信号を312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調されたコード信号は、送信アンテナ19を介して送信される(図7・携帯機2コード信号)。
【0080】
FSK変調されたコード信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調されたコード信号を復調する。CPU3Aは、受信部8Aにて復調された携帯機2からのコード信号が送信されたことを判別すると(S120・YES)、携帯機2からのコード信号と照合すべくFlashメモリ6Aからコード信号を読み出す。そして、CPU3Aは、携帯機2からのコード信号とFlashメモリ6Aからのコード信号が所定の関係を有しているか否かを判別する(S121)。そして、CPU3Aは、携帯機2からのコード信号とFlashメモリ6Aからのコード信号が所定の関係を有していると判別すると(S121・YES)、暗号化個人データ読出信号を送信部7Aに送信する(S122)。そして、CPU3Aは、受信部8Aにて復調された携帯機2からの暗号化個人データが送信されてくるか否かを判別する(S123)。送信部7Aは、当該暗号化個人データ読出信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された暗号化個人データ読出信号は、送信アンテナ9Aを介して送信される(図7・車載機1A暗号化個人データ読出信号)。
【0081】
ASK変調された暗号化個人データ読出信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された暗号化個人データ読出信号を復調する。CPU11は、復調部24にて復調された暗号化個人データ読出信号が送信されたことを判別すると(S212・YES)、Flashメモリ13から暗号化個人データを読み出す。そして、CPU11は、変調部25に当該暗号化個人データを送信する(S213)。変調部25は、CPU11からの暗号化個人データを312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された暗号化個人データは、送信アンテナ19を介して送信される(図7・携帯機2暗号化個人データ)。
【0082】
FSK変調された暗号化個人データを車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された暗号化個人データを復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの暗号化個人データが送信されたことを判別すると(S123・YES)、Flashメモリ6Aに記憶されている暗号化解読プログラムに基づいて、当該暗号化個人データの解読を行う(S124)。そして、CPU3Aは、携帯機2からの暗号化個人データの解読を終えると(以下、解読後の暗号化個人データを解読後個人データという)、Flashメモリ6Aに記憶されている個人データを読み出す。CPU3Aは、解読後個人データとFlashメモリ6Aからの個人データとが一致しているか否か判別する(S125)。そして、CPU3Aは、解読後個人データとFlashメモリ6Aからの個人データが一致すると判別すると(S125・YES)、入力確認信号を送信部7Aに送信する(S126)。そして、CPU3Aは、受信部8Aにて復調された携帯機2からの入力信号が送信されてくるか否かを判別する(S127)。送信部7Aは、当該入力確認信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された入力確認信号は、送信アンテナ9Aを介して送信される(図7・車載機1A入力確認信号)。
【0083】
ASK変調された入力確認信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された入力確認信号を復調する。CPU11は、復調部24にて復調された入力確認信号が送信されたことを判別すると(S214・YES)、フラグ23に記憶されている情報を読み出す。このときのフラグ23に記憶されている情報とは、前述したように携帯者が運転席側のドアをアンロックしたい場合、携帯者が切替スイッチ(不図示)を一方側に切り替えることによって指示信号が入力部12に入力され、入力部12が当該指示信号に基づいてフラグ23に記憶した情報“1”である。或いは、前述したように携帯者が自動車の全てのドアをアンロックしたい場合、携帯者が切替スイッチ(不図示)を他方側に切り替えることによって指示信号が入力部12に入力され、入力部12が当該指示信号に基づいてフラグ23に記憶した情報“0”である。本実施形態では、フラグ23には例えば“1”が記憶されているものとして以下説明する。CPU11は、フラグ23に記憶されている“1”に応じた入力信号を変調部25に送信する(S215)。変調部25は、CPU11からの入力信号を312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された入力信号は、送信アンテナ19を介して送信される(図7・携帯機2入力信号)。
【0084】
FSK変調された入力信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された入力信号を復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの入力信号が送信されたことを判別すると(S127・YES)、当該入力信号が“1”に応じた入力信号であるか否かを判別する(S128)。そして、CPU3Aは、当該入力信号が“1”に応じた入力信号であることを判別すると(S128・YES)、自動車の運転席側のドアのみをアンロックさせるための指示信号をCPU90に送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車の運転席側のドアのみをアンロックさせるための指示信号を受信すると、自動車の運転席側のドアのみをアンロックさせるべく前述した制御部(不図示)に指示信号を送信する(S129)。制御部は、CPU90からの当該指示信号に基づいて、自動車の運転席側のドアのみをアンロックさせる。また、CPU3Aは、入力信号が“1”に応じた入力信号でないと判別すると(S128・NO)、自動車の全てのドアをアンロックさせるための指示信号をCPU90に送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車の全てのドアをアンロックさせるための指示信号を受信すると、自動車の全てのドアをアンロックさせるべく制御部に指示信号を送信する(S130)。制御部は、当該指示信号に基づいて、自動車の全てのドアをアンロックさせる。
【0085】
このように、通信可能範囲内に携帯機2があり、且つ、CPU3A、3B、3C、3Dが送信部7A、7B、7C、7Dに送信する距離算出用信号と、受信部8A、8B、8C、8Dにて復調された携帯機2からの距離算出用信号から、車載機1A、1B、1C、1Dから携帯機2までの距離を算出し、CPU90が当該距離が予め定められた距離未満であると判別すると、制御部よって自動車の全てのドア又は運転席のドアがアンロックされることとなる。
【0086】
上述した実施形態によれば、CPU90が、車載機1A、1B、1C、1Dと携帯機2との間の複数の距離が予め定められた距離以上であると判別した場合、車載機1A、1B、1C、1Dと携帯機2とを通信させている中継機Aの位置を検出することが可能となる。つまり、本来車載機1A、1B、1C、1Dと携帯機2との間の複数の距離が予め定められた距離以上となることによって通信不能となるにも関わらず、当該車載機1A、1B、1C、1Dと当該携帯機2とを通信可能とさせている中継機Aの位置を検出することが可能となる。
【0087】
また、車載機1A、1B、1C、1Dからの距離算出用信号をインバータ21にてそのまま返信することが可能となる。そのため、CPU3A、3B、3C、3Dは送信した距離算出用信号と、携帯機2から返信された送信した距離算出用信号と同じ距離算出用信号と、から車載機1A、1B、1C、1Dと携帯機2との間の距離を算出しているので、正確な距離を確実に算出することが可能となる。
【0088】
また、車載機1A、1B、1C、1Dから携帯機2への通信において、低周波数の搬送波で通信を行うことによって位相差を意図的に生じさせることができる。また、携帯機2から車載機1A、1B、1C、1Dへの通信において、高周波の搬送波で通信を行うことによって、車載機1A、1B、1C、1Dから携帯機2への通信により生じた位相差に比べ無視できる程度の位相差とすることができる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信において意図的に生じさせた位相差によって、CPU3A、3B、3C、3Dは、車載機1A、1B、1C、1Dから携帯機2までの複数の距離を算出することが可能となる。
【0089】
また、CPU3A、3B、3C、3Dは、所定数ごとに生成する距離算出用信号のパターンを変えるため、例えば読出機などによって距離算出用信号を読み出す者に対するセキュリティー面を向上することが可能となる。また、CPU3A、3B、3C、3Dがインバータ21にて返信された距離算出用信号を受信するまで距離算出用信号を繰り返し送信するため、CPU3A、3B、3C、3Dは車載機1A、1B、1C、1Dと携帯機2との間の複数の距離を算出することを確実に行うことができる。
【0090】
また、低周波数の搬送波で通信を行う車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波による変調に適したASK変調を用いることによって、回路構成が容易となり、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となる。高周波数の搬送波で通信を行う携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波による変調に適したFSK変調を用いることによって、ノイズによる影響を受けにくくなり、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となる。
【0091】
また、車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信においてスペクトラム拡散にて通信を行うことにより、当該スペクトラム拡散にて送信された信号の秘匿性を高めることができ、また、妨害波・干渉波等に対する排除能力を著しく高めることができる。
【0092】
また、位相差を検出するためのタイマ5A、5B、5C、5Dと、所定周波数のクロックでカウントするカウンタ4A、4B、4C、4Dと、カウント値に基づいてCPU3A、3B、3C、3Dが車載機1A、1B、1C、1Dと携帯機2との間の距離を算出する基となる情報が記憶されているFlashメモリ6A、6B、6C、6Dとを用いて、CPU3A、3B、3C、3Dが車載機1A、1B、1C、1Dと携帯機2との複数の距離を算出することを確実に行うことが可能となる。また、各タイマ及び各カウンタが、CPU3A、3B、3C、3Dが距離算出用信号を送信するごとにリセットされることにより、CPU3A、3B、3C、3Dが送信したときの距離算出用信号と、受信したときの前記CPU3A、3B、3C、3Dが送信した距離算出用信号と同じ距離算出用信号と、から車載機1A、1B、1C、1Dと携帯機2の間の複数の距離をCPU3A、3B、3C、3Dが確実に算出することが可能となる。
【0093】
また、CPU3A、3B、3C、3Dにて算出された携帯機2との間の複数の距離が予め定められた距離以上であるとCPU90が判別したとき、警報部(不図示)を動作させて警報を発することが可能となる。したがって、CPU90が前述した判別をしたとき、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2との通信が行われていることを携帯者に知らせることが可能となる。
【0094】
また、CPU3A、3B、3C、3Dにて算出された携帯機2との間の複数の距離が予め定められた距離以上であるとCPU90が判別したとき、モニタ92に携帯機2′の位置を表示させることが可能となる。したがって、CPU90が前述した判別をしたとき、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2との通信が行われていること、及び当該携帯機2′の位置を知らせることが可能となる。
【0095】
また、CPU90が、CPU3A、3B、3C、3Dにて算出された車載機1A、1B、1C、1Dと携帯機2との間の複数の距離が予め定められた距離以上であると判別した場合、携帯機2との通信を行わなくすることが可能となる。そのため、例えば中継機Aが車載機1A、1B、1C、1Dと携帯機2との間に介在することによって通信が行われたとしても、CPU90が前述した判別をした以後の携帯機2との通信を行わなくすることができる。
【0096】
更に、車載機1A、1B、1C、1Dと携帯機2との間の複数の距離を算出することができ、当該複数の距離が予め定められた距離未満であるとCPU90が判別したとき、自動車のドアをアンロックさせることが可能となる。また、当該複数の距離が予め定められた距離以上であるとCPU90が判別したとき、自動車のドアをロックさせることができる。つまり、キー(自動車の鍵)を鍵穴に差し込むことなく、CPU90の判別結果により、自動車のドアのアンロック又はロックを行うことが可能となる。
【0097】
===その他の実施の形態===
以上、本発明に係る位置検出システム、位置検出通信装置、通信装置における、中継機Aの位置の検出について説明したが、上記の説明は、本発明の理解を容易とするためのものであり、本発明を限定するものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得る。
【0098】
<<位置検出システム、位置検出通信装置、通信装置のその他の形態>>
本実施形態においては、自動車の前述した位置に車載機1A、1B、1C、1Dを設けているがこれに限るものではない。
【0099】
例えば、車載機1A、1B、1C、1Dが設けられた位置に、受信部8Aと受信アンテナ10A、受信部8Bと受信アンテナ10B、受信部8Cと受信アンテナ10C、受信部8Dと受信アンテナ10Dのみを設けても良い。その場合、送信部、送信アンテナ、OSC、Flashメモリ、タイマ、カウンタを構成とする車載機を1つ設け、CPU90に統括制御させる。そして、前述したようにCPU90からの距離算出用信号が、送信部を介して送信アンテナから送信される。そしてCPU90は、携帯機2から返信される距離算出用信号を受信アンテナ10A、10B、10C、10Dを介して受信部8A、8B、8C、8Dが例えば受信した順に、当該距離算出用信号を受信した受信アンテナから携帯機2′(リレーアタックがされていない場合は携帯機2)までの距離を算出する。そして、CPU90は、算出した受信アンテナ10A、10B、10C、10Dから携帯機2までの各距離情報に基づいて携帯機2′の検出範囲、地図情報を算出するように設けても良い。
【0100】
<<位置検出システム、位置検出通信装置、通信装置の適用>>
本実施形態では、位置検出システム、位置検出通信装置、通信装置をパッシブキーレスエントリーシステム機能が搭載された自動車に用いているが、本発明の適用対象はこれに限るものではない。
【0101】
居場所を特定する必要がある人(例えば園児又は老人。以下、被監視者という)に携帯機2を持たせ、車載機1Aと同一の機能を有する監視装置を被監視者を監視する者(以下、監視者という)が管理する。そして、監視者は、監視装置からのエリア内確認信号Aに基づいて、携帯機2からエリア内確認信号Bが送信されてくるか否かを監視装置が判別することによって、被監視者が通信可能範囲内にいるか否を判断することができる。そして、被監視者が所持する携帯機2からのエリア内確認信号Bが携帯機2から送信されてこないと監視装置が判別したとき、例えば監視装置は警報(アラーム)を鳴らして監視者に被監視者が通信可能範囲から出たことを知らせる。よって、監視者による被監視者の迅速な保護を図ることが可能となる。また、各被監視者の持つ携帯機2のFlashメモリ13に識別コードを記憶させ、エリア内確認信号Bとともに当該識別コードを携帯機2から送信させるように設けても良い。そうすることによって、監視者は、被監視者のうち誰が通信可能範囲から出たのかを把握することが可能となる。更に、車載機1A、1B、1C、1Dと同一の機能を有する前述した監視装置を複数設けさせる。そして、当該複数の監視装置からエリア内確認信号Aを送信させる。仮に被監視者が通信可能範囲を出てしまった場合、当該被監視者が通信可能範囲を出る直前の複数の監視装置が受信したエリア内確認信号Bに基づいて、被監視者が通信可能範囲を出た方向を監視者が容易に知ることが可能となる。なぜならば、複数の監視装置は、エリア内確認信号Aを送信してから予め定められた時間t1内にエリア内確認信号Bが送信されてくるか否かを判別する。そのため、被監視者の最も近傍にある監視装置には、エリア内確認信号Bが最も早く送信されてくることとなる。よって、被監視者が通信可能範囲を出た方向が、当該被監視者の最も近傍にある監視装置によって判別することができる。そのため、監視者による被監視者の探索がより確実なものとなる。よって被監視者が通信可能範囲を出てしまったことによる事故を未然に防ぐことが可能となる。更に、被監視者が通信可能範囲を出てしまった場合、複数の監視装置は携帯機2からのエリア内確認信号Bが送信されてこないと判別し、距離算出用信号を送信する。そして、仮に携帯機2と複数の監視装置との間に中継機がある場合、中継機を介して当該距離算出用信号が複数の監視装置に返信される。複数の監視装置は、送信したときの距離算出用信号と携帯機2からの距離算出用信号との位相差から、前述した携帯機2′の検出範囲を算出する。そして、算出した携帯機2′の検出範囲から中継機の位置を予測することが可能となり、中継機を所持する者による被監視者の例えば誘拐等を未然に防ぐことが可能となる。
【0102】
また、例えば携帯機2を自宅のキーとして用いても良い。そして、車載機1A、1B、1C、1Dと同一の機能を有する複数の管理装置を自宅のドアに設ける。仮に携帯機2と複数の管理装置との間に中継機がある場合、複数の管理装置において算出した携帯機2と管理装置との距離が予め定められた距離未満ではないと複数の管理装置を統括制御する制御部が判別する。そのため、当該制御部は携帯機2との通信をストップさせる。よって、セキュリティー面が向上し、中継機を介して自宅への侵入を図る窃盗者等による被害を防ぐことが可能となる。同様に自宅以外の建物等へ入るときなどにも用いることが可能である。
【図面の簡単な説明】
【0103】
【図1】本発明に係る位置検出システム、位置検出通信装置、通信装置の全体構成の一例を示す図である。
【図2】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。
【図3】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。
【図4】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。
【図5】距離算出用信号の変化を示す図である。
【図6】車載機1A、1B、1C、1Dによる中継機Aの位置の検出を示す図である。
【図7】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。
【図8】距離算出用信号の変化を示す図である。
【図9】中継機A、Bを介した車載機101と携帯機102の通信を示す図である。
【符号の説明】
【0104】
1、101 車載機
2、102 携帯機
3、11、90 CPU
4 カウンタ
5、27 タイマ
6、13 Flashメモリ
7 送信部
8 受信部
9、19 送信アンテナ
10、18 受信アンテナ
12 入力部
14 DET
15 変調器
16、17 RF
20、21、22 インバータ
23 フラグ
24 復調部
25 変調部
26 OSC
92 モニタ
【技術分野】
【0001】
本発明は、位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置に関する。
【背景技術】
【0002】
近年、所定の処理を実行すべく相互に通信を行う通信装置として、例えばパッシブキーレスエントリーシステムを搭載した自動車における車載機と携帯機がある。
【0003】
以下、パッシブキーレスエントリーシステムを搭載した自動車における車載機と携帯機の通信について詳述する。車載機は、例えば自動車の運転席側のドアに設けられ、携帯機は、当該自動車の所有者(以下、携帯者という)が所持しているものとする。そして、携帯者は、自動車のエンジンを停止し、ドアを開けて車外に出たものとする。
【0004】
車載機は、車載機と携帯機の通信可能範囲(エリア)内に携帯機があるか否かを判別するための信号(以下、信号Aという)を送信する。携帯者が通信可能範囲内にいるときは、携帯機は車載機からの信号Aを受信し、当該信号Aに応じた信号Bを送信する。車載機は携帯機からの信号Bを受信すると、通信可能範囲内に携帯機があると判別する。尚、車載機からの信号Aの送信は所定の間隔で繰り返し行われる。
【0005】
仮に、携帯者が通信可能範囲外に出てしまった場合、携帯機は車載機からの信号Aを受信できなくなる。そのため、車載機は携帯機からの信号Aに応じた信号Bを受信しなくなる。車載機は、例えば携帯機からの信号Bを予め定められた時間受信しなくなると、自動車内部に別途設けられた制御部に当該自動車のドアをロックさせるための指示信号を送信する。制御部は、車載機からの当該指示信号に基づいて、自動車のドアをロックさせる。よって携帯者が自動車から離れ、携帯機が通信可能範囲外となると、自動車のドアはロックされることとなる。
【0006】
次に、一旦は通信可能範囲外に出た携帯者が、通信可能範囲内に戻ってきた場合、再び携帯機は車載機からの信号Aを受信する。そして、携帯機は信号Bを送信することとなる。車載機は携帯機からの信号Bを受信すると、携帯機が当該自動車に対応したものであるか否かを判別するため、例えば携帯機の情報を読み出すための読出信号を送信する。携帯機は、車載機からの読出信号に基づいて、携帯機情報を送信する。車載機は、携帯機からの携帯機情報に基づいて、携帯機が当該自動車に対応したものであるか否かを判別する。そして車載機は、携帯機が当該自動車に対応したものであると判別すると、前述した制御部に当該自動車のドアをアンロックさせるための指示信号を送信する。制御部は、車載機からの当該指示信号に基づいて、自動車のドアをアンロックさせる。
【0007】
このように、パッシブキーレスエントリーシステムが搭載された自動車においては、自動車のキー(鍵)を鍵穴に差し込むことなく、車載機と携帯機が通信を行うことにより、当該自動車のドアをロック又はアンロックさせることを可能としている。
【特許文献1】特開2000−198420号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、パッシブキーレスエントリーシステムが搭載された自動車の前述したような車載機と携帯機の通信において、いわゆるリレーアタックが行われた場合、当該自動車が窃盗される可能性があった。このリレーアタックとは、携帯者が通信可能範囲から出てしまうことにより本来であれば車載機と携帯機の通信ができなくなる状態であっても、中継機を用いることによって車載機と携帯機の通信を可能とさせ、自動車のドアをアンロックとさせて当該自動車を盗む窃盗手口のことをいう。
【0009】
以下、図9を用いてリレーアタックについて詳述する。図9は、中継機A、Bを介した車載機101と携帯機102の通信を示す図である。車載機101は、例えば運転席側のドアに設けられており、前述した信号Aを送信する。車載機101は、破線Cで示される通信範囲内において信号の送受信が可能である。携帯機102は、前述したように車載機101からの信号Aを受信すると、当該信号Aに応じた信号Bを送信する。尚、携帯機102は、破線Dで示される通信範囲内において信号の送受信が可能である。
【0010】
携帯者が通信可能範囲を出てしまうと、前述したように車載機101には携帯機102からの信号Aに応じた信号Bが送信されなくなり、制御部(不図示)は車載機101からの指示信号に基づいてドアをロックさせる。
【0011】
このとき、自動車を窃盗しようとする中継者X、Yがいるとする。中継者Xは、中継機Aを所持して車載機101を通信範囲C内に入れる。また、中継者Yは、中継機Bを所持して携帯者の傍に行き、中継機Bを携帯機102の通信範囲D内に入れる。中継者Xが所持する中継機Aは車載機101の通信範囲C内に入っているため信号Aを受信し、中継機Aは信号Aを検波し、増幅してから送信する。中継機Aは信号Aを増幅させることによって、車載機101の通信範囲Cよりも広い範囲で信号Aを送信可能としている。中継機Aにて増幅された信号Aを中継者Yが所持する中継機Bが受信すると、中継機Bは当該増幅された信号Aを検波して、例えば中継機Aが増幅する前のレベルの信号Aに減衰して送信する。このとき、中継機Bは携帯機102の通信範囲D内に入っているため、中継機Bにて減衰された信号Aを携帯機102が受信する。携帯機102は、車載機101からの信号Aが送信されてきたものとして、当該信号Aに応じた信号Bを送信する。信号Bを中継機Bが受信すると、中継機Bは信号Bを検波し、増幅してから送信する。中継機Bは、信号Bを増幅させることによって、携帯機102の通信範囲Dよりも広い範囲で信号Bを送信可能としている。中継機Bにて増幅された信号Bを中継機Aが受信すると、中継機Aは当該増幅された信号Bを検波して、例えば中継機Bが増幅する前のレベルの信号Bに減衰して送信する。このとき、前述したように中継機Aは車載機101の通信範囲C内に入っているため、中継機Aにて減衰された信号Bを車載機101が受信する。そのため車載機101は、信号Aに応じた信号Bを受信することにより、携帯機102が通信可能範囲内にあるものと判別する。そして、車載機101は、自動車のドアをアンロックさせるための前述した処理を行うこととなる。そして、アンロックされた自動車に例えば中継者Xが乗り込み、当該自動車が盗まれることとなる。
【0012】
このように、中継機A、Bが介在する車載機101と携帯機102の通信においては、車載機101が中継機A、Bを介して信号Bを受信することにより、携帯機102が通信可能範囲内にあると判別する可能性があった。そのため、車載機101は自動車のドアをアンロックさせるための指示信号を制御部に送信し、制御部は携帯者が通信可能範囲内にいないにもかかわらず、ドアをアンロックしてしまう可能性があった。
【0013】
そこで、本発明は、複数の第1通信装置(例えば複数の車載機)と第2通信装置(例えば携帯機)との間の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態にもかかわらず、複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置(例えば中継機)の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
前記課題を解決するための発明は、複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、前記複数の第1通信装置は、それぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【0015】
また、第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該第1通信装置と当該第2通信装置とが通信不能となった状態において、前記第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、前記第1通信装置は、前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、前記検出部にて検出された前記複数の位相差に基づいて、前記第2通装置との間の前記複数の距離を算出する算出部と、を備え、前記第2通信装置は、前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【0016】
また、複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムの位置検出方法であって、前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別し、前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると判別したとき、このときの前記複数の距離に応じた前記中継装置の位置を検出する、ことを特徴とする。
【0017】
また、相手側通信装置との間の複数の距離が予め定められた距離以上となることによって当該相手側通信装置と通信不能となった状態において、前記相手側通信装置と通信可能とさせる中継装置の位置検出通信装置であって、前記相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の距離算出通信装置を備え、前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
【0018】
また、通信装置は、距離を算出するための距離算出用信号を送信し、返信されてきた前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出し、前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、前記複数の距離算出通信装置にて算出された複数の距離が予め定められた距離以上となることによって、前記送信位置からの前記距離算出用信号に応じた信号を受信不能となった状態において、前記複数の距離算出通信装置に前記送信位置からの前記距離算出用信号に応じた信号を受信可能とさせる中継装置の位置を検出すべく、当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離未満であるか否かを判別し、当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離以上であると判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する、相手側通信装置と通信可能であって、前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、ことを特徴とする。
【発明の効果】
【0019】
本発明によれば、複数の第1通信装置と第2通信装置との間の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態にもかかわらず、複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0020】
本明細書および添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0021】
<<実施形態>>
===位置検出システム、位置検出通信装置、通信装置の全体構成===
図1、図6を参照しつつ、本発明に係る位置検出システム、位置検出通信装置、通信装置について説明する。図1は、本発明に係る位置検出システム、位置検出通信装置、通信装置の全体構成の一例を示す機能ブロック図である。尚、本実施形態では位置検出システム、位置検出通信装置、通信装置は、例えば自動車のドアをキー操作せずにロック又はアンロックさせることが可能なパッシブキーレスエントリーシステムに用いるものとして説明する。そして、位置検出システムは、車載機1A、1B、1C、1D(複数の第1通信装置)、携帯機2(第2通信装置)、CPU(Central Processing Unit)90(判別部、位置検出部)から構成される。また、位置検出通信装置は車載機1A、1B、1C、1D(距離算出通信装置)、CPU90(判別部、位置検出部)から構成され、相手側通信装置は携帯機2に用いられるものとする。更に、通信装置は携帯機2に用いられ、相手側通信装置は車載機1A、1B、1C、1D(距離算出通信装置)、CPU90から構成される。図6は、車載機1A、1B、1C、1Dによる中継機Aの位置の検出を示す図である。尚、図6における+Y方向を自動車の前方方向とすると、例えば、車載機1Aは前方右側に設けられ、車載機1Bは前方左側に設けられ、車載機1Cは後方左側に設けられ、車載機1Dは後方右側に設けられるものとする。また、CPU90は、車載機1A、1B、1C、1Dが設けられた自動車内部に設けられるものとする。携帯機2は自動車のキー(鍵)に設けられているものとする。尚、本実施形態においては車載機を4つ設けているがこれに限るものではない。例えば、車載機をより多く設けて確実に中継機Aの位置を検出するよう設けても良い。
【0022】
尚、本実施形態では、車載機1A、1B、1C、1Dから携帯機2への信号の通信において、低周波数(例えば125kHz)の搬送波を用いることとする。また携帯機2から車載機1A、1B、1C、1Dへの信号の通信において、高周波数(例えば312MHz)の搬送波を用いることとする。即ち、車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波で通信が行われるため通信速度が遅くなる。逆に、携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波で通信が行われるため通信速度が速くなる。通信速度が遅い低周波数を用いているのは、後述するように車載機1A、1B、1C、1Dから信号を送信させた時間と当該信号が携帯機2を介して返信されてきた時間との信号の位相差(時間差でもよい)を意図的に生じさせるためである。また、携帯機2から車載機1A、1B、1C、1Dへの通信の場合、通信速度が速い高周波数を用いることによって、その間における位相差は車載機1A、1B、1C、1Dから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信における意図的に生じさせた位相差のみをもって、車載機1A、1B、1C、1Dと携帯機2の間の距離を算出することが可能となる。そのため、意図的な低周波数を車載機1A、1B、1C、1Dから携帯機2への通信に用い、さらに高周波数を携帯機2から車載機1A、1B、1C、1Dへの通信に用いている。
【0023】
更に、前述したような車載機1A、1B、1C、1Dから携帯機2への通信においては、ASK変調(振幅偏移変調:Amplitude Shift Keying)がなされた信号によって通信が行われる。何故ならば、車載機1A、1B、1C、1Dから携帯機2へ信号を送信するための送信部7A、7B、7C、7D(第1送信部、第1変調部)と、車載機1A、1B、1C、1Dからの信号を受信するための復調部24(第2復調部)の回路構成が容易で、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となるからである。また、携帯機2から車載機1A、1B、1C、1Dへの通信においては、FSK変調(周波数偏移変調:Frequency Shift Keying)がなされた信号によって通信が行われる。何故ならば、FSK変調がなされた信号は、ノイズによる影響を受けにくく、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となるからである。尚、本実施形態においては、車載機1A、1B、1C、1Dから携帯機2への通信においてASK変調された信号にて通信を行い、携帯機2から車載機1A、1B、1C、1Dへの通信においてFSK変調された信号にて通信を行っているがこれに限るものではない。例えば、信号の秘匿性を高めることができ、妨害波・干渉波に対する排除能力が著しく高いスペクトラム拡散にて車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信を行うことも可能である。
【0024】
CPU90は、車載機1A、1B、1C、1Dを統括制御する。
【0025】
車載機1Aは、CPU3A(検出部、算出部、生成部)、カウンタ4A、タイマ5A、Flashメモリ6A(記憶部)、送信部7A、受信部8A(第1復調部)、送信アンテナ9A、受信アンテナ10A、OSC26A(発振回路:Oscillator)を有している。
【0026】
送信部7Aは、CPU3Aからの信号を125kHzの周波数の搬送波でASK変調する。
【0027】
送信アンテナ9Aは、送信部7AにてASK変調された信号を送信する。
【0028】
受信アンテナ10Aは、携帯機2からのFSK変調された信号を受信する。
【0029】
受信部8Aは、受信アンテナ10Aが受信した携帯機2からのFSK変調された信号を復調する。
【0030】
CPU3Aは、車載機1Aを統括制御するために設けられている。Flashメモリ6Aには、CPU3Aが後述する処理を行うためのプログラムデータが予め記憶されている。また、Flashメモリ6Aには、CPU3Aが自動車のドアをアンロックするための処理を行う際、受信部8Aにて復調された携帯機2からのデータと照合を行うためのコード信号、個人データが予め記憶されている。更に、Flashメモリ6Aには、受信部8Aにて復調された携帯機2からの暗号化個人データ(CPU3Aによって前述した個人データと照合されるべく携帯機2のFlashメモリ13に記憶されている暗号化された個人データ)を解読するための暗号化解読プログラムが予め記憶されている。Flashメモリ6Aは、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0031】
タイマ5Aは、CPU3Aからの指示に基づいて時間を計時する。
【0032】
OSC26Aは、所定周波数のクロック(CLK0)をCPU3Aに送信する。
【0033】
カウンタ4Aは、CPU90からの指示に基づいて、CPU3Aから送信部7Aに送信される車載機1Aから携帯機2までの距離を算出するための信号(以下、距離算出用信号という)の立上りから、OSC26Aからのクロックの例えば立ち上がりをカウントする。そして、カウンタ4Aは、受信部8Aにて復調された距離算出用信号の立ち上がりまで、OSC26Aからのクロックの立ち上がりをカウントする。また、カウンタ4Aのカウント値は、CPU3Aからの指示に基づいてリセットされる。
【0034】
CPU3Aは、CPU90からの指示信号に基づいて、前述した距離算出用信号を送信部7Aに送信するとともにカウンタ4Aをリセットさせてカウントを開始させる。また、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号を受信すると、カウンタ4Aのカウント値を読み出す。CPU3Aは、当該カウント値を基に車載機1Aから携帯機2までの距離を算出する。つまり、距離算出用信号を送信部7Aに送信した時間から、携帯機2を介して距離算出用信号が返信されてきた時間までの両信号の位相差を示すカウント値が得られ、CPU3Aは車載機1Aから携帯機2までの距離を算出することができる。例えば、OSC26Aからのクロックの周波数が15.75kHzである場合、携帯機2を介して距離算出用信号が返信されてきたときのカウンタ4Aのカウント値が250となっていたとき、このときの位相差は約15.87(msec)となる。そして、位相差が約15.87(msec)のときの車載機1Aから携帯機2までの距離は約1(m)となることが、例えば実験からもとめられているものとする。この実験からもとめられたカウント値に対応した距離データは、例えばFlashメモリ6Aにテーブルデータとして予め記憶されている。CPU3Aは、算出した車載機1Aから携帯機2までの距離情報をCPU90に送信する。CPU3Aは、CPU90からの指示に基づいて、携帯機2のインバータ21(返信部)を不動作状態とするための信号(以下、識別信号という)を送信部7Aに送信する。また、CPU3Aは、Flashメモリ6Aに記憶されているコード信号に応じたコード信号を携帯機2から読み出すための信号(以下、コード読出信号という)を送信部7Aに送信する。CPU3Aは、受信部8Aにて復調された携帯機2からのコード信号が送信される。CPU3Aは、携帯機2からのコード信号とFlashメモリ6Aからのコード信号が所定の関係を有していると判別した場合、前述した暗号化個人データを読み出すための信号(以下、暗号化個人データ読出信号という)を送信部7Aに送信する。CPU3Aは、受信部8Aにて復調された携帯機2からの暗号化個人データが送信される。CPU3Aは、Flashメモリ6Aに記憶されている暗号化解読プログラムに基づいて、当該暗号化個人データの解読を行う。CPU3Aは、解読した個人データとFlashメモリ6Aからの個人データが一致すると判別した場合、自動車の何れのドア(例えば自動車の全てのドア又は運転席のドアの何れか)をアンロックするのかを確認するための信号(以下、入力確認信号という)を送信部7Aに送信する。CPU3Aには、受信部8Aにて復調された携帯機2からの入力確認信号に応じた入力信号が送信される。CPU3Aは、受信部8Aにて復調された携帯機2からの入力信号に基づいて、自動車のドアをアンロックするための指示信号を、CPU90に送信する。また、CPU3Aは、CPU90からの指示に基づいて携帯機2が通信可能範囲内あるか否かを判別するための信号(以下、エリア内確認信号Aという)を送信部7Aに送信する。このとき、CPU3Aは、タイマ5Aをリセットさせて、計時を開始させる。CPU3Aは、当該エリア内確認信号Aに対応する信号(以下、エリア内確認信号Bという)が、予め定められた時間内(図4・t1)に携帯機2から送信されてくるか否かを判別する。CPU3Aは、当該エリア内確認信号Bが予め定められた時間内に、携帯機2から送信されてこないと判別すると、自動車のドアをロックさせるための指示信号をCPU90に送信する。尚、CPU3Aのこれらの機能は、前述したFlashメモリ6Aから読み出されたプログラムデータの解読結果に基づいて、CPU3Aが当該プログラムを実行することによって実現される。CPU3Aは、Flashメモリ6Aのアドレスを指定するアドレスカウンタ(不図示)、Flashメモリ6Aから読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0035】
車載機1B、1C、1Dの構成は、前述した車載機1Aと同様の構成である。尚、車載機1A、1B、1C、1Dは、同時にCPU90からの指示に基づいて前述した処理を行っても良いし、順次前述した処理を行っても良い。
【0036】
CPU90は、自動車内に設けられた制御部(不図示)からの指示信号に基づいて、CPU3A、3B、3C、3Dが前述したエリア内確認信号Aを送信するための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車のドアをロックさせるための指示信号を受信すると制御部に自動車のドアをロックさせるべく指示信号を送信する。そして、CPU90は、CPU3A、3B、3C、3Dに車載機1A、1B、1C、1Dから携帯機2までの距離を算出させるための指示信号を車載機1A、1B、1C、1Dに送信する。CPU90は、CPU3A、3B、3C、3Dが算出した車載機1A、1B、1C、1Dから携帯機2までの距離情報が送信される。CPU90は、前述した距離情報に基づいて、車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離未満(例えば1m)であるか否かを判別する。CPU90は、車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離以上であると判別すると、CPU3A、3B、3C、3Dが算出した距離情報に応じた携帯機2′の位置を検出する(図6参照)。尚、このときCPU90が車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離以上であると判別することによって、車載機1A、1B、1C、1Dと携帯機2との間には中継機A(中継装置)が介在していることとなる。何故ならば、車載機1A、1B、1C、1Dと携帯機2の間の距離が予め定められた距離未満であるということは、車載機1A、1B、1C、1Dと携帯機2は通信可能範囲内にあるということになる。そして、通信可能範囲外つまり車載機1A、1B、1C、1Dと携帯機2の間の距離が予め定められた距離以上となる場合は、本来車載機1A、1B、1C、1Dと携帯機2は通信不能となる。よって本来であれば車載機1A、1B、1C、1Dと携帯機2の間の距離が予め定められた距離以上となる距離は、CPU3A、3B、3C、3Dにて算出されるべき正当な距離ではないこととなる。つまり、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2との通信が行われていると判別することができる。そして、当該中継機Aの位置を検出すべく、CPU90は、前述したようにCPU3A、3B、3C、3Dが算出した距離情報に応じた携帯機2′の位置を検出する。このときの、CPU90による携帯機2′の位置の検出は、例えばCPU3A、3B、3C、3Dが算出した距離情報から読み出される各距離の一致点を用いることによって求めることができる。CPU90は、検出した携帯機2′の位置と車載機1A、1B、1C、1Dからなる範囲(以下、検出範囲という)を算出する。CPU90は、算出した検出範囲を示す信号(以下、検出信号という)を車載機1A、1B、1C、1Dに送信する。尚、本実施形態においては、検出範囲を示す検出信号のみを車載機1A、1B、1C、1Dに送信しているがこれに限るものではない。例えば、全地球測位システム(GPS:Global Positioning System)が搭載された自動車であれば、検出範囲とともに当該検出範囲の地図情報を示す信号を送信するように設けてもよい。そうすることによって、車載機1A、1B、1C、1Dを介して携帯機2の所持者(以下、携帯者という)に、より正確な中継機Aの位置を知らせることが可能となる。尚、CPU90は、車載機1A、1B、1C、1Dから携帯機2までの距離が予め定められた距離未満であると判別すると、CPU3A、3B、3C、3Dが前述した識別信号を送信するための指示信号を送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dからの前述した自動車のドアをアンロックさせるための指示信号を受信すると制御部に自動車のドアをアンロックさせるべく指示信号を送信する。CPU90のこれらの機能は、メモリ(不図示)から読み出されたプログラムデータの解読結果に基づいて、CPU90が当該プログラムデータを実行することによって実現される。CPU90は、メモリのアドレスを指定するアドレスカウンタ(不図示)、メモリから読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0037】
携帯機2は、CPU11、入力部12、Flashメモリ13、復調部24、変調部25(第2送信部、第2変調部)、受信アンテナ18、送信アンテナ19、インバータ20、21、22、フラグ23、タイマ27、モニタ92を有している。
【0038】
受信アンテナ18は、車載機1A、1B、1C、1DからのASK変調された信号を受信する。
【0039】
復調部24は、例えばRF16(Radio Frequency)、DET14(Detector)から構成されている。復調部24は、受信アンテナ18からのASK変調された信号を復調する。
【0040】
変調部25は、例えばRF17、変調器15から構成されている。変調部25は、CPU11からの信号を312MHzの周波数の搬送波でFSK変調する。また、変調部25は、CPU11の指示によってインバータ21が動作状態となっている場合、復調部24からの信号を312MHzの周波数の搬送波でFSK変調する。
【0041】
送信アンテナ19は、変調部25にてFSK変調された信号を送信する。
【0042】
CPU11は、携帯機2を統括制御するために設けられている。Flashメモリ13には、CPU11が後述する処理を行うためのプログラムデータが予め記憶されている。また、Flashメモリ13には、車載機1A、1B、1C、1Dからのコード読出信号に応じて、車載機1A、1B、1C、1Dに送信するためのコード信号が記憶されている。更に、Flashメモリ13には、車載機1A、1B、1C、1Dからの暗号化個人データ読出信号に基づいて、車載機1A、1B、1C、1Dに送信するための暗号化個人データが記憶されている。Flashメモリ13は、データを電気消去することによりデータを繰り返し書き込み読み出しできる不揮発性記憶素子で構成される。
【0043】
タイマ27は、CPU11からの指示信号に基づいて計時する。
【0044】
入力部12は、例えば携帯者からの指示入力に基づく指示信号が入力される。例えば携帯者が運転席側のドアをアンロックしたい場合、運転席側のドアをアンロックするための指示入力を携帯者が行い、当該指示入力に基づく指示信号が入力部12に入力される。そして、入力部12は、当該運転席側のドアをアンロックするための当該指示信号が入力されると、フラグ23に例えば一方の論理値“1”を記憶させる。また、例えば携帯者が自動車の全てのドアをアンロックしたい場合、自動車の全てのドアをアンロックするための指示入力を携帯者が行い、当該指示入力に基づく指示信号が入力部12に入力される。そして、入力部12は、当該全てのドアをアンロックするための指示信号が入力されると、フラグ23に例えば他方の論理値“0”を記憶させる。尚、本実施形態では、例えばキー(鍵)に切替スイッチ(不図示)を設けさせ、携帯者が運転席側のドアをアンロックしたい場合は当該切替スイッチを一方側に切り替え、自動車の全てのドアをアンロックしたい場合は当該切替スイッチを他方側に切り替える。そして、入力部12には当該切替スイッチを一方側に切り替えることによって運転席側のドアをアンロックするための指示信号が入力され、入力部12はフラグ23に“1”を記憶させるものとして説明する。また、入力部12には当該切替スイッチを他方側に切り替えることによって全てのドアをアンロックするための指示信号が入力され、入力部12はフラグ23に“0”を記憶させるものとして説明する。
【0045】
CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのエリア内確認信号Aが送信され、変調部25にエリア内確認信号Bを送信する。このとき、CPU11は、タイマ27をリセットさせて計時を開始させる。CPU11は、予め定められた時間内(図4・t2)にエリア内確認信号Aが再び車載機1から送信されてくるか否かを判別する。CPU11は、エリア内確認信号Aが予め定められた時間内に送信されてこないと判別すると、インバータ21を動作状態とする。そのため、復調部24にて復調された車載機1A、1B、1C、1Dからの信号に対して何ら処理が行われることなく、そのまま変調部25にてFSK変調されて送信アンテナ19から送信させることが可能となる。CPU11は、復調部24にて復調されたCPU90から車載機1A、1B、1C、1Dを介して送信される前述した検出信号が送信される。CPU11は、当該検出信号に基づいて、モニタ92に検出範囲を表示させるべく表示信号をモニタ92に送信する。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからの識別信号が送信され、当該識別信号が送信されたと判別すると、インバータ21を不動作状態とする。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからのコード読出信号が送信され、当該コード読出信号が送信されたと判別すると、Flashメモリ13からコード信号を読み出して、変調部25に送信する。CPU11は復調部24にて復調された車載機1A、1B、1C、1Dからの暗号化個人データ読出信号が送信され、当該個人データ読出信号が送信されたと判別すると、Flashメモリ13から暗号化個人データを読み出して、変調部25に送信する。CPU11は、復調部24にて復調された車載機1A、1B、1C、1Dからの入力確認信号が送信される。CPU11は、当該入力確認信号に基づいて、このときのフラグ23に記憶されている“1”又は“0”の情報を入力信号として変調部25に送信する。尚、CPU11のこれらの機能は、前述したFlashメモリ13から読み出されたプログラムデータの解読結果に基づいて、CPU11が当該プログラムを実行することによって実現される。CPU11は、Flashメモリ13のアドレスを指定するアドレスカウンタ(不図示)、Flashメモリ13から読み出されるプログラムデータを解読するプログラムロジックアレイ(不図示)、論理演算を行う演算論理ユニット(不図示)、演算データを一時格納するレジスタ(不図示)等を有する。
【0046】
モニタ92は、CPU11からの表示信号に基づいて、検出範囲を表示する。
【0047】
===位置検出システム、位置検出通信装置、通信装置の動作===
図1乃至図6を参照しつつ本発明に係る位置検出システム、位置検出通信装置、通信装置の動作について説明する。図2、図3は、本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。図4は、本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。図5は距離算出用信号の変化を示す図である。尚、図4においては、ハイレベルのとき左欄に記載されている信号が送信されたことを示している。実際においては、車載機1A、1B、1C、1Dから携帯機2に送信される信号は送信部7A、7B、7C、7DにてASK変調された信号であり、携帯機2から車載機1A、1B、1C、1Dに送信される信号は変調部25にてFSK変調された信号である。また、図4における左欄・車載機1A距離算出用信号の1発のハイレベルは便宜上、図5における左欄・距離算出用信号(送信)の波形を示すものとして説明する。
【0048】
尚、本実施形態においては、携帯者が自動車のエンジンをストップし、携帯機2を持って自動車を出てドアを閉じた場面から説明する。また、携帯機2のインバータ21は不動作状態であるものとする。
【0049】
以下、車載機1Aの動作について説明するが車載機1B、1C、1Dについても同様の動作であるものとする。
【0050】
自動車内に別途設けられた制御部(不図示)は、自動車のドアが閉じられたことに基づく信号を受信する。制御部は、当該信号に基づいてパッシブキーレスエントリーシステムを開始するための信号をCPU90に送信する。そして、CPU90は、当該パッシブキーレスエントリーシステムを開始するための信号を受信すると、CPU3Aがエリア内確認信号Aを送信するための指示信号を送信する。CPU3Aは、CPU90からの当該指示信号に基づいて、送信部7Aにエリア内確認信号Aを送信する(S101)。このとき、CPU3Aはタイマ5Aをリセットする。リセットされたタイマ5Aは計時を開始する。そして、CPU3Aは、受信部8Aにて復調された携帯機2からのエリア内確認信号Bが、予め定められた時間(t1)内に送信されてくるか否かを判別する(S102)。送信部7Aは、当該エリア内確認信号Aを125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調されたエリア内確認信号Aは、送信アンテナ9Aを介して送信される(図4・車載機1Aエリア内確認信号A)。
【0051】
ASK変調されたエリア内確認信号Aを携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調されたエリア内確認信号Aを復調する。そして、CPU11は、復調部24にて復調されたエリア内確認信号Aが送信されたことを判別すると(S201・YES)、エリア内確認信号Bを変調部25に送信する(S202)。このとき、CPU11はタイマ27をリセットする。リセットされたタイマ27は計時を開始する。そして、CPU11は、復調部24にて復調された車載機1Aからのエリア内確認信号Aが予め定められた時間(t2)内に再び送信されてくるか否かを判別する(S201)。変調部25は、CPU11からのエリア内確認信号Bを312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調されたエリア内確認信号Bは、送信アンテナ19を介して送信される(図4・携帯機2エリア内確認信号B)。
【0052】
FSK変調されたエリア内確認信号Bを車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調されたエリア内確認信号Bを復調する。CPU3Aは、受信部8Aにて復調された携帯機2からのエリア内確認信号Bが送信されたことを判別すると(S102・YES)、エリア内確認信号Aを再び送信部7Aに送信する(S101)。
【0053】
このように車載機1Aからのエリア内確認信号Aを携帯機2が受信可能な通信可能範囲に携帯者がいれば、携帯機2からのエリア内確認信号Bを車載機1Aが受信することが可能となる(図4・エリア内)。そのため車載機1Aは携帯者が近傍(つまり通信可能範囲内)にいるか否かを判別することが可能となる。
【0054】
次に、携帯者が、前述した通信可能範囲を出てしまった場合(図4・エリア外)について説明する。
【0055】
携帯者が通信可能範囲を出てしまうと、車載機1Aからのエリア内確認信号Aを携帯機2が受信できなくなり、そのため携帯機2からのエリア内確認信号Bが車載機1Aに送信されなくなる。CPU3Aは、エリア内確認信号Aを送信してから予め定められた時間(t1)経過しても携帯機2からのエリア内確認信号Bが送信されてこないと判別すると(S102・NO)、自動車のドアをロックさせるための指示信号をCPU90に送信する。尚、この場合、CPU3Aは、複数回(例えば2回)エリア内確認信号Aを送信部7Aに送信するように設定しても良い(図4参照)。そして、当該複数回のエリア内確認信号Aうちの何れの送信に対しても、携帯機2からエリア内確認信号Bが送信されないとCPU3Aが判別した場合、自動車のドアをロックさせるための指示信号をCPU90に送信させるようにしても良い。そうすれば、より確実に携帯者が通信可能範囲内にいないことをCPU3Aが判別することできる。更に、携帯者が一旦は通信可能範囲外に出たが直ぐに通信可能範囲内に戻ってきた場合において、ドアをロックするための処理を行わずに済むことが可能となる。そのため、ドアをアンロックさせるための処理に要する時間が必要なくなり、ドアがアンロックされるまでの当該処理に要する時間の遅れを解消することが可能となる。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車のドアをロックするための指示信号を受信すると、前述した制御部(不図示)に自動車のドアをロックさせるべく指示信号を送信する(S103)。CPU90からの当該指示信号を受信した制御部は、当該指示信号に基づいて自動車のドアをロックさせる(図4・ドア閉)。またCPU3Aは、前述したように自動車のドアをロックさせるための指示信号をCPU90に送信すると、距離算出用信号(図5・距離算出用信号(送信))を送信部7Aに送信する(S104)。このとき、CPU3Aは、カウンタ4Aをリセットさせ、カウンタ4Aに当該距離算出用信号の立上りからカウントを開始させる。更に、CPU3Aは、タイマ5Aをリセットさせて計時を開始させる。そして、CPU3Aは、当該距離算出用信号が予め定められた時間(t3)内に携帯機2から返信されてくるか否かを判別する(S105)。送信部7Aは、当該距離算出用信号を125kHzの周波数の搬送波でASK変調する(図5・ASK(1))。そして、送信部7AにてASK変調された距離算出用信号は、送信アンテナ9Aを介して送信される(図4・車載機1A距離算出用信号)。このときCPU3Aは、距離算出用信号を送信してから前述した予め定められた時間(t3)内に受信部8Aにて復調された距離算出用信号が返信されてこないと判別すると、再び距離算出用信号を送信する。また、前述したようにタイマ5Aをリセットさせて計時を開始させ、カウンタ5Aをリセットさせてカウントを開始させる。尚、この距離算出用信号は、図5に示す波形(距離算出用信号(送信))に限るものではない。セキュリティーを高めるために、例えばCPU3Aから送信する都度信号の内容を変えても良いし(つまり距離算出用信号を示す波形が変わる)、一定時間ごとに信号の内容を変えても良い。
【0056】
CPU11は、エリア内確認信号Aが予め定められた期間(t2)送信されないと判別すると、インバータ21を動作状態とする(S203。図4・インバータ21)。
【0057】
このように携帯者が車載機1Aからのエリア内確認信号Aを受信可能な通信可能範囲から出てしまうと、自動車のドアがロックされることとなる。
【0058】
例えば携帯者が通信可能範囲を出て、自動車を視認できない距離まで離れたとき、中継者X(不図示)が自動車と携帯者の間に行き、車載機1Aの通信圏内(図6・2点鎖線の円)、車載機1Cの通信圏内(図6・破線の円)、車載機1Dの通信圏内(図6・実線の円)、携帯機2の通信圏内(不図示)に中継機Aの通信圏内(図6・実線の円E)を交わるように中継機Aを設ける。そうすることによって、中継機Aは、車載機1A、1C、1D、携帯機2からの信号を受信することが可能となる。そして、中継者Xは、当該自動車の盗難を企むものとする(リレーアタックが行われる)。尚、車載機1Bの通信圏内(図6・一点鎖線の円)は、中継機Aの通信圏内(図6・実線の円E)とは交わっていないので、車載機1Bからの信号は携帯機2には送信されないこととなる。
【0059】
以下、車載機1Aと中継機Aとの動作について説明するが、車載機1C、1Dについても同様の動作であるものとする。
【0060】
車載機1Aと通信可能な中継機Aは、車載機1Aからの距離算出用信号を受信すると、当該距離算出用信号を検波して増幅する(図5・ASK(2))。そして、中継機Aは、距離算出用信号ASK(2)を送信する。このとき中継機Aから送信された距離算出用信号ASK(2)の通信距離は、車載機1Aからの距離算出用信号ASK(1)の通常通信距離に比べ、中継機Aにて増幅されているため、より遠距離までの通信が可能となっている。つまり、中継機Aは、車載機1Aからの距離算出用信号を携帯機2に受信させるべく前述した処理を行っている。
【0061】
そのため、中継機Aからの増幅された距離算出用信号ASK(3)を携帯機2の受信アンテナ18が受信することとなる。尚、車載機1Aから携帯機2への通信は前述したように低周波数である125kHzの搬送波で通信が行われているため、受信アンテナ18が受信する距離算出用信号ASK(3)は、図5に示すとおり位相差T3が生じることとなる。復調部24は、距離算出用信号ASK(3)を復調する。このとき復調部24にて復調された中継機Aからの距離算出用信号は、インバータ21が動作状態となっているため、そのまま変調部25に送信される(S205)。変調部25は、復調部24からの距離算出用信号を312MHzの周波数の搬送波でFSK変調する(図5・FSK(1))。変調部25にてFSK変調された距離算出用信号FSK(1)は、送信アンテナ19を介して送信される(図4・携帯機2距離算出用信号)。
【0062】
そして、前述したように携帯機2と通信可能な中継機Aは、FSK変調された携帯機2からの距離算出用信号FSK(1)を受信する。中継機AはFSK変調された距離算出用信号FSK(1)を検波して増幅する(図5・FSK(2))。そして、中継機Aは、距離算出用信号FSK(2)を送信する。このとき中継機Aから送信された距離算出用信号FSK(2)の通信距離は、携帯機2からの距離算出用信号FSK(1)の通常通信距離に比べ、中継機Aにて増幅されているため、より遠距離までの通信が可能となっている。
【0063】
そして、中継機Aからの増幅された距離算出用信号FSK(3)を車載機1Aの受信アンテナ10Aが受信する。受信部8Aは、距離算出用信号FSK(3)を復調する(図5・距離算出用信号(受信))。CPU3Aは、受信部8Aにて復調された距離算出用信号が送信されたことを判別すると(S105・YES)、カウンタ4Aのカウント値を読み出す。そして、当該カウント値に基づいて、車載機1Aから携帯機2までの距離を算出する。尚、前述したように中継機Aは、車載機1Aから送信された距離算出用信号ASK(1)を増幅するために、当該距離算出用信号ASK(1)を一旦検波してから増幅を行わなければならない。また、車載機1Aから携帯機2への通信においては、125kHzの周波数の搬送波でASK変調して通信を行っている。そのため距離算出用信号ASK(1)の1周期は、携帯機2から送信される距離算出用信号FSK(1)と比べて長くなっている。つまり、中継機Aは、1周期が長い距離算出用信号ASK(1)を一旦検波してから増幅するため、距離算出用信号ASK(1)と距離算出用信号ASK(2)には位相差T2(図5)が生じることとなる。更に、前述したように車載機1Aから携帯機2への通信においては、低周波数である125kHzの搬送波が用いられている。また、携帯機2から車載機1Aへの通信においては、高周波である312MHzの搬送波が用いられている。よって携帯機2から車載機1Aへの通信における位相差は、車載機1Aから携帯機2への通信の際生じる位相差に比べ無視できる程度となる。そのためCPU3Aから送信部7Aに送信した距離算出用信号と受信部8Aにて復調された距離算出用信号とは、125kHzの低周波数を用いたことにより意図的な位相差T3(図5)が生じることとなる。つまり、CPU3Aが送信部7Aに送信した距離算出用信号(送信)と、受信部8Aにて復調された距離算出用信号(受信)との位相差はT4(T2+T3)となる。よって、前述したCPU3Aが読み出した当該カウント値は、当該位相差T4を示していることとなる。そして、CPU3Aは、当該カウント値を用いて車載機1Aから携帯機2までの距離を算出することとなる。CPU3Aは、Flashメモリ6Aにテーブルデータとして記憶されている実験からもとめられた当該カウント値に対応する距離を読み出す。よって、CPU3Aは、当該位相差T4を示す当該カウント値を用いて、車載機1Aから携帯機2までの距離を算出することが可能となる。CPU3Aは、算出した車載機1Aから携帯機2までの距離を示す距離情報をCPU90に送信する(S106)。同様に、CPU3Cは、算出した車載機1Cから携帯機2までの距離を示す距離情報をCPU90に送信する(S108)。また、CPU3Dは、算出した車載機1Dから携帯機2までの距離を示す距離情報をCPU90に送信する(S109)。尚、本実施形態においては、カウンタ4Aのカウント値によって、車載機1Aから携帯機2までの距離を算出しているがこれに限るものではない。例えば、CPU3Aは、CPU3Aから送信部7Aに距離算出用信号を送信させたときにタイマ5Aを計時させ、受信部8Aにて復調された携帯機2からの距離算出用信号が送信されたときのタイマ5Aが計時する時間を読み出す。そして、タイマ5Aが計時する当該時間を用いて車載機1Aから携帯機2までの距離を算出することも可能である。
【0064】
CPU90は、車載機1A、1C、1Dからの距離情報に基づいて、携帯機2が車載機1A、1C、1Dから予め定められた距離(例えば1m)未満にあるか否かを判別する(S110)。このときのCPU90は、携帯機2が車載機1A、1C、1Dから予め定められた距離未満にはないと判別することとなる(S110・NO)。何故ならば、前述したように中継機Aを介することによって、本来生じることの無いはずの位相差T2が生じているためである。そのため、CPU3Aが車載機1Aから携帯機2までの距離を算出するために用いる位相差T4を示すカウント値は、中継機Aが介在しない場合の位相差T3を示すカウント値に比べ多い値となっている。つまり、CPU3Aが位相差T4を示すカウント値に基づいて算出した車載機1Aから携帯機2までの距離は、位相差T3を示すカウント値に基づいて算出した距離に比べ長い距離となる。そのため、CPU90は、携帯機2が車載機1Aから予め定められた距離未満ではないと判別することとなる。同様に、CPU90は、携帯機2が車載機1Cから予め定められた距離未満ではないと判別することとなる。また、CPU90は、携帯機2が車載機1Dからあらかじめ定められた距離未満ではないと判別することとなる。尚、CPU90によるによる車載機1A、1C、1Dから携帯機2までの距離の判別は、1回に限るものでもない。例えば、複数回(図4においては3回)車載機1A、1C、1Dから携帯機2までの距離の判別を行うことも可能である。そうすることによって、より確実に車載機1A、1C、1Dから携帯機2までの距離を判別することが可能となる。
【0065】
携帯機2が車載機1A、1C、1Dから予め定められた距離未満にはないと判別したCPU90は、タイマ(不図示)の計時が所定時間(t4)に達しているか否かを判別する(S111)。CPU90は、タイマの計時が所定時間(t4)達していないと判別した場合(S111・NO)、車載機1A、1C、1Dからの距離情報に応じた携帯機2′の位置を検出する。そのためCPU90は、CPU3A、3C、3Dが算出した各距離の一致点を検出する(S112)。このCPU3A、3C、3Dが算出した各距離の一致点は、図6に示すとおり本来の携帯機2がある位置を示すものでなく、CPU3A、3C、3Dが算出した各距離に基づく携帯機2′の位置を示すものとなる。以下、携帯機2′の位置の検出について詳述すると、例えば実際の車載機1Aから中継機Aまでの距離をa(図6・2点鎖線の直線)、中継機Aから携帯機2までの距離をe(図6・実線の直線)とすると、CPU3Aが算出した車載機1Aから携帯機2までの距離は、a+eに応じた値Bとなる。また、実際の車載機1Cから中継機Aまでの距離をc(図6・破線の直線)とすると、CPU3Cが算出した車載機1Cから携帯機2までの距離はc+eに応じた値Cとなる。また、実際の車載機1Dから中継機Aまでの距離をd(図6・実線の直線)とすると、CPU3Dが算出した車載機1Dから携帯機2までの距離はd+eに応じた値Dとなる。図6で示すとおり中継機Aから車載機1A、1C、1Dまでのうち、最も中継機Aに近い車載機は車載機1Dである。つまり、車載機1Dから送信される距離算出用信号が、中継機Aを介して、携帯機2から最も早く車載機1Dに返信されることとなる。そのため、車載機1Dと携帯機2との通信による位相差が小さくなり、CPU3Dが算出する車載機1Dから携帯機2までの距離Dは、CPU3A、3Cが算出した距離B、Cよりも短い値となる。そのため、CPU3A、3C、3Dが算出した各距離に基づく携帯機2′の位置は、図6に示すとおり車載機1Dから最も近い距離となる。そして、CPU90は、携帯機2′と自動車間であってCPU3A、3Cが算出した距離A、Cに囲まれた範囲を検出範囲として算出する(S113)。尚このとき、CPU90は、例えば全地球測位システム(GPS)によって携帯機2′の検出範囲の地図情報を算出するように設けても良い。そして、CPU90は、算出した携帯機2′の検出範囲とともに、当該検出範囲の地図情報を加えた検出信号を車載機1A、1B、1C、1Dに送信するように設けても良い。以下、本実施形態において、CPU90は、算出した検出範囲とともに携帯機2′の地図情報を示す検出信号を送信するものとして説明する。
【0066】
CPU90は、携帯機2′の検出範囲及び地図情報を算出すると、CPU3A、3B、3C、3Dに識別信号を送信させるための指示信号を送信する。以下、車載機1Aの動作について説明するが車載機1B、1C、1Dも動作も同様である。但し、前述したように車載機1Bの通信圏内(図6・一点鎖線の円)は、中継機Aの通信圏内(図6・実線の円E)とは交わっていないので、車載機1Bからの信号は携帯機2には送信されないこととなる。CPU3Aは、CPU90からの当該指示信号を受信すると、送信部7Aに識別信号を送信する(S114)。送信部7Aは、当該識別信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AからのASK変調された識別信号は、送信アンテナ9Aを介して送信される。尚、当該識別信号も前述したように、中継機Aにて検波され増幅されて携帯機2に送信されることとなる。
【0067】
中継機Aにて増幅された識別信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された識別信号を復調する。CPU11は、復調部24にて復調された車載機1Aからの識別信号が受信されたことを判別すると(S206・YES)、インバータ21を不動作状態とする(S207。図4車載機1A識別信号)。
【0068】
次に、CPU90は、算出した携帯機2′の検出範囲及び当該検出範囲の地図情報を示す検出信号を車載機1A、1B、1C、1Dに送信する。CPU3Aは、CPU90からの検出信号を受信すると、送信部7Aに検出信号を送信する(S115)。送信部7Aは、CPU90からの当該検出信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された検出信号は、送信アンテナ9Aを介して送信される。尚、当該検出信号も前述したように、中継機Aにて検波され増幅されて携帯機2に送信されることとなる。
【0069】
中継機Aにて増幅された検出信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された検出信号を復調する。CPU11は、復調部24にて復調された車載機1Aからの検出信号が受信されたことを判別すると(S208・YES)、当該検出信号に基づいて、モニタ92に携帯機2′の検出範囲、地図情報を表示させるべく表示信号をモニタ92に送信する。CPU11からの当該表示信号を受信したモニタ92は、当該表示信号に応じた携帯機2′の検出範囲、地図情報を表示する。
【0070】
このように、携帯者に携帯機2′の検出範囲、地図情報を知らせることが可能となる。このとき携帯者は、モニタ92に表示された携帯機2′の検出範囲、地図情報によって、中継機Aの位置を予測することが可能となり、また、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2の通信が行われていることを知ることが可能となる。よって、当該車載機1A、1B、1C、1Dが搭載された自動車の中継者Xによる盗難を防ぐことが可能となる。また、本実施形態によれば、車載機1A、1B、1C、1Dに対する携帯機2′の位置によって中継機Aか介在している方向を、少なくとも携帯者は知ることが可能となる。尚、本実施形態においては、車載機を4つ設けているがこれに限るものでもない。例えば、少なくとも中継機Aと通信可能となる車載機を3つ設けることによって、携帯機2と当該3つ設けられた車載機との距離算出することによって携帯機2′の検出範囲を算出することが可能となる。最小限の数の車載機を用いることによって、不必要な車載機を自動車に設ける必要がなくなり車載機の製造・設置によるコストを軽減でき、またCPU90の前述した処理を軽減することが可能となる。
【0071】
尚、検出信号を車載機1A、1B、1C、1Dに送信したCPU90は、再び距離算出用信号を車載機1A、1B、1C、1Dから送信させるべく指示信号を送信する。以下、車載機1Aについて説明するが車載機1B、1C、1Dも同様であるものとする。CPU3Aは、当該指示信号に基づいて距離判別信号を再び送信する。このとき、CPU3Aは、カウンタ4Aをリセットさせ、カウンタ4Aに当該距離算出用信号の立上りからカウントを開始させる。尚、CPU3Aが再び距離算出用信号を送信部7Aに送信しているのは、CPU3Aによる車載機1Aから携帯機2までの距離の算出をより確実にするためである。そして、CPU90は、予め定められた距離未満であると判別することなく(S110・NO)所定時間(t4)が達したと判別すると(S111・YES)、携帯機2との通信をストップする(S116)。尚、本実施形態においては、CPU90が予め定められた距離未満でないと判別することなく所定時間が達したと判別した場合、携帯機2との通信をストップしているがこれに限るものではない。例えば、携帯機2に警報を発するための警報部(不図示)を設ける。そして、CPU90は、予め定められた距離未満でないと判別した場合、車載機1A、1B、1C、1Dに当該警報部が警報を発するための警報信号を送信するための指示信号を送信する。そして、中継機Aを介して携帯機2に送信された当該警報信号に基づいて、警報部が警報を発するように設けても良い。そうすれば、携帯者は中継者Xが介在していることを知ることができ、セキュリティー面を向上させることが可能となる。尚、携帯者が再び通信可能範囲に戻ってきても、前述したように車載機1A、1B、1C、1Dは携帯機2との通信をストップしているためドアはアンロックされない。この場合、携帯者はキーを鍵穴に差し込むことによりドアをアンロックする。その際、制御部(不図示)は、キーが鍵穴に差し込まれたことによりドアがアンロックされたことに基づく信号を受信する。制御部は、当該信号に基づいて、車載機1A、1B、1C、1Dが携帯機2との通信を開始するための指示信号をCPU90に送信する。CPU90は、当該指示信号を受信すると、車載機1A、1B、1C、1Dに通信開始指示信号を送信する。CPU90からの通信開始指示信号を受信したCPU3A、3B、3C、3Dは(S117・YES)、当該通信開始指示信号に基づいて、再び携帯機2との通信を開始する。
【0072】
以下、図1乃至図8を参照しつつ中継機Aが介在していない場合であって、通信可能範囲を出てしまった携帯者が再び通信可能範囲内に戻ってきた場合の上述した位置検出システム、位置検出通信装置、通信装置の動作について説明する。図7は、本発明に係る位置検出システム、位置検出装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。図8は、距離算出用信号の変化を示す図である。尚、図7においては、ハイレベルのとき左欄に記載されている信号が送信されたことを示している。実際においては、車載機1A、1B、1C、1Dから携帯機2に送信される信号は送信部7A、7B、7C、7DにてASK変調された信号であり、携帯機2から車載機1A、1B、1C、1Dに送信される信号は変調部25にてFSK変調された信号である。また、図7における左欄・車載機1A距離算出用信号の1発のハイレベルは便宜上、図8における左欄・距離算出用信号(送信)の波形を示すものとして説明する。
【0073】
尚、携帯者が通信可能範囲を出てしまって、自動車のドアがロックされるまでは上述したとおりである。また、車載機1Aの動作について説明するが車載機1B、1C、1Dについても同様の動作であるものとする。
【0074】
携帯者が、通信可能範囲内に戻ってくると(図7・右のエリア内)、車載機1AからのASK変調された距離算出用信号(図8・ASK)を携帯機2の受信アンテナ18が受信する。復調部24は、ASK変調された距離算出用信号を復調する。このとき復調部24にて復調された車載機1Aからの距離算出用信号は、インバータ21が動作状態となっているため、そのまま変調部25に送信される(S205)。変調部25は、復調部24からの距離算出用信号を312MHzの周波数の搬送波でFSK変調する(図5・FSK)。変調部25にてFSK変調された距離算出用信号は、送信アンテナ19を介して送信される(図7・携帯機2距離算出用信号)。
【0075】
FSK変調された距離算出用信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された距離算出用信号を復調する(図8・距離算出用信号(受信))。CPU3Aは、受信部8Aにて復調された携帯機2からの距離算出用信号が送信されたことを判別すると(S105・YES)、カウンタ4Aのカウント値を読み出す。そして、CPU3Aは当該カウント値に基づいて、車載機1Aから携帯機2までの距離を算出する。尚、前述したように車載機1Aから携帯機2への通信においては、低周波数である125kHzの搬送波が用いられている。また、携帯機2から車載機1Aへの通信においては、高周波である312MHzの搬送波が用いられている。よって携帯機2から車載機1Aへの通信における位相差は、車載機1Aから携帯機2への通信の際生じる位相差に比べ無視できる程度なる。そのためCPU3Aから送信部7Aに送信した距離算出用信号と受信部8Aにて復調された距離算出用信号とは、125kHzの低周波数を用いたことにより意図的な位相差T1(図8)が生じることとなる。よって、前述したCPU3Aが読み出した当該カウント値は、当該位相差T1を示していることとなる。そして、CPU3Aは、Flashメモリ6Aにテーブルデータとして記憶されている実験からもとめられた当該カウント値に対応する距離を読み出す。よって、CPU3は、当該位相差T1を示す当該カウント値を用いて、車載機1Aから携帯機2までの距離を算出することが可能となる。そして、CPU3Aは、算出した車載機1Aから携帯機2までの距離を示す距離情報をCPU90に送信する(S106)。同様に、CPU3Bは、算出した車載機1Bから携帯機2までの距離を示す距離情報をCPU90に送信する(S107)。同様に、CPU3Cは、算出した車載機1Cから携帯機2までの距離を示す距離情報をCPU90に送信する(S108)。また、CPU3Dは、算出した車載機1Dから携帯機2までの距離を示す距離情報をCPU90に送信する(S109)。
【0076】
CPU90は、車載機1A、1B、1C、1Dからの距離情報に基づいて、携帯機2が車載機1A、1B、1C、1Dから予め定められた距離未満にあるか否かを判別する(S110)。この場合、車載機1A、1B、1C、1Dと携帯機2との通信において中継機Aが介在されていないので、CPU90は携帯機2が車載機1A、1B、1C、1Dから予め定められた距離未満にあると判別することとなる(S110・YES)。そして、CPU90は、CPU3A、3B、3C、3Dに識別信号を送信させるための指示信号を送信する。CPU3Aは、CPU90からの当該指示信号を受信すると、送信部7Aに識別信号を送信する(S118)。送信部7Aは、当該識別信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された識別信号は、送信アンテナ9Aを介して送信される(図7・車載機1A識別信号)。
【0077】
ASK変調された識別信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された識別信号を復調する。CPU11は、復調部24にて復調された車載機1Aからの識別信号が送信されたことを判別すると(S206・YES)、インバータ21を不動作状態とする(S207。図7・インバータ21)。
【0078】
次に、車載機1AのCPU3Aは、送信部7Aにコード読出信号を送信する(S119)。そして、CPU3Aは、受信部8Aにて復調された携帯機2からのコード信号が送信されてくるか否かを判別する(S120)。送信部7Aは、当該コード読出信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調されたコード読出信号は、送信アンテナ9Aを介して送信される(図7・車載機1Aコード読出信号)。
【0079】
ASK変調されたコード読出信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調されたコード読出信号を復調する。CPU11は、復調部24にて復調された車載機1Aからのコード読出信号が送信されたことを判別すると(S210・YES)、Flashメモリ13からコード信号を読み出す。そして、CPU11は、変調部25に当該コード信号を送信する(S211)。変調部25は、CPU11からのコード信号を312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調されたコード信号は、送信アンテナ19を介して送信される(図7・携帯機2コード信号)。
【0080】
FSK変調されたコード信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調されたコード信号を復調する。CPU3Aは、受信部8Aにて復調された携帯機2からのコード信号が送信されたことを判別すると(S120・YES)、携帯機2からのコード信号と照合すべくFlashメモリ6Aからコード信号を読み出す。そして、CPU3Aは、携帯機2からのコード信号とFlashメモリ6Aからのコード信号が所定の関係を有しているか否かを判別する(S121)。そして、CPU3Aは、携帯機2からのコード信号とFlashメモリ6Aからのコード信号が所定の関係を有していると判別すると(S121・YES)、暗号化個人データ読出信号を送信部7Aに送信する(S122)。そして、CPU3Aは、受信部8Aにて復調された携帯機2からの暗号化個人データが送信されてくるか否かを判別する(S123)。送信部7Aは、当該暗号化個人データ読出信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された暗号化個人データ読出信号は、送信アンテナ9Aを介して送信される(図7・車載機1A暗号化個人データ読出信号)。
【0081】
ASK変調された暗号化個人データ読出信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された暗号化個人データ読出信号を復調する。CPU11は、復調部24にて復調された暗号化個人データ読出信号が送信されたことを判別すると(S212・YES)、Flashメモリ13から暗号化個人データを読み出す。そして、CPU11は、変調部25に当該暗号化個人データを送信する(S213)。変調部25は、CPU11からの暗号化個人データを312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された暗号化個人データは、送信アンテナ19を介して送信される(図7・携帯機2暗号化個人データ)。
【0082】
FSK変調された暗号化個人データを車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された暗号化個人データを復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの暗号化個人データが送信されたことを判別すると(S123・YES)、Flashメモリ6Aに記憶されている暗号化解読プログラムに基づいて、当該暗号化個人データの解読を行う(S124)。そして、CPU3Aは、携帯機2からの暗号化個人データの解読を終えると(以下、解読後の暗号化個人データを解読後個人データという)、Flashメモリ6Aに記憶されている個人データを読み出す。CPU3Aは、解読後個人データとFlashメモリ6Aからの個人データとが一致しているか否か判別する(S125)。そして、CPU3Aは、解読後個人データとFlashメモリ6Aからの個人データが一致すると判別すると(S125・YES)、入力確認信号を送信部7Aに送信する(S126)。そして、CPU3Aは、受信部8Aにて復調された携帯機2からの入力信号が送信されてくるか否かを判別する(S127)。送信部7Aは、当該入力確認信号を125kHzの周波数の搬送波でASK変調する。そして、送信部7AにてASK変調された入力確認信号は、送信アンテナ9Aを介して送信される(図7・車載機1A入力確認信号)。
【0083】
ASK変調された入力確認信号を携帯機2の受信アンテナ18が受信すると、復調部24は、ASK変調された入力確認信号を復調する。CPU11は、復調部24にて復調された入力確認信号が送信されたことを判別すると(S214・YES)、フラグ23に記憶されている情報を読み出す。このときのフラグ23に記憶されている情報とは、前述したように携帯者が運転席側のドアをアンロックしたい場合、携帯者が切替スイッチ(不図示)を一方側に切り替えることによって指示信号が入力部12に入力され、入力部12が当該指示信号に基づいてフラグ23に記憶した情報“1”である。或いは、前述したように携帯者が自動車の全てのドアをアンロックしたい場合、携帯者が切替スイッチ(不図示)を他方側に切り替えることによって指示信号が入力部12に入力され、入力部12が当該指示信号に基づいてフラグ23に記憶した情報“0”である。本実施形態では、フラグ23には例えば“1”が記憶されているものとして以下説明する。CPU11は、フラグ23に記憶されている“1”に応じた入力信号を変調部25に送信する(S215)。変調部25は、CPU11からの入力信号を312MHzの周波数の搬送波でFSK変調する。変調部25にてFSK変調された入力信号は、送信アンテナ19を介して送信される(図7・携帯機2入力信号)。
【0084】
FSK変調された入力信号を車載機1Aの受信アンテナ10Aが受信すると、受信部8AはFSK変調された入力信号を復調する。CPU3Aは、受信部8Aにて復調された携帯機2からの入力信号が送信されたことを判別すると(S127・YES)、当該入力信号が“1”に応じた入力信号であるか否かを判別する(S128)。そして、CPU3Aは、当該入力信号が“1”に応じた入力信号であることを判別すると(S128・YES)、自動車の運転席側のドアのみをアンロックさせるための指示信号をCPU90に送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車の運転席側のドアのみをアンロックさせるための指示信号を受信すると、自動車の運転席側のドアのみをアンロックさせるべく前述した制御部(不図示)に指示信号を送信する(S129)。制御部は、CPU90からの当該指示信号に基づいて、自動車の運転席側のドアのみをアンロックさせる。また、CPU3Aは、入力信号が“1”に応じた入力信号でないと判別すると(S128・NO)、自動車の全てのドアをアンロックさせるための指示信号をCPU90に送信する。CPU90は、例えば全ての車載機1A、1B、1C、1Dから自動車の全てのドアをアンロックさせるための指示信号を受信すると、自動車の全てのドアをアンロックさせるべく制御部に指示信号を送信する(S130)。制御部は、当該指示信号に基づいて、自動車の全てのドアをアンロックさせる。
【0085】
このように、通信可能範囲内に携帯機2があり、且つ、CPU3A、3B、3C、3Dが送信部7A、7B、7C、7Dに送信する距離算出用信号と、受信部8A、8B、8C、8Dにて復調された携帯機2からの距離算出用信号から、車載機1A、1B、1C、1Dから携帯機2までの距離を算出し、CPU90が当該距離が予め定められた距離未満であると判別すると、制御部よって自動車の全てのドア又は運転席のドアがアンロックされることとなる。
【0086】
上述した実施形態によれば、CPU90が、車載機1A、1B、1C、1Dと携帯機2との間の複数の距離が予め定められた距離以上であると判別した場合、車載機1A、1B、1C、1Dと携帯機2とを通信させている中継機Aの位置を検出することが可能となる。つまり、本来車載機1A、1B、1C、1Dと携帯機2との間の複数の距離が予め定められた距離以上となることによって通信不能となるにも関わらず、当該車載機1A、1B、1C、1Dと当該携帯機2とを通信可能とさせている中継機Aの位置を検出することが可能となる。
【0087】
また、車載機1A、1B、1C、1Dからの距離算出用信号をインバータ21にてそのまま返信することが可能となる。そのため、CPU3A、3B、3C、3Dは送信した距離算出用信号と、携帯機2から返信された送信した距離算出用信号と同じ距離算出用信号と、から車載機1A、1B、1C、1Dと携帯機2との間の距離を算出しているので、正確な距離を確実に算出することが可能となる。
【0088】
また、車載機1A、1B、1C、1Dから携帯機2への通信において、低周波数の搬送波で通信を行うことによって位相差を意図的に生じさせることができる。また、携帯機2から車載機1A、1B、1C、1Dへの通信において、高周波の搬送波で通信を行うことによって、車載機1A、1B、1C、1Dから携帯機2への通信により生じた位相差に比べ無視できる程度の位相差とすることができる。つまり、車載機1A、1B、1C、1Dから携帯機2への通信において意図的に生じさせた位相差によって、CPU3A、3B、3C、3Dは、車載機1A、1B、1C、1Dから携帯機2までの複数の距離を算出することが可能となる。
【0089】
また、CPU3A、3B、3C、3Dは、所定数ごとに生成する距離算出用信号のパターンを変えるため、例えば読出機などによって距離算出用信号を読み出す者に対するセキュリティー面を向上することが可能となる。また、CPU3A、3B、3C、3Dがインバータ21にて返信された距離算出用信号を受信するまで距離算出用信号を繰り返し送信するため、CPU3A、3B、3C、3Dは車載機1A、1B、1C、1Dと携帯機2との間の複数の距離を算出することを確実に行うことができる。
【0090】
また、低周波数の搬送波で通信を行う車載機1A、1B、1C、1Dから携帯機2への通信においては、低周波数の搬送波による変調に適したASK変調を用いることによって、回路構成が容易となり、ある程度混信しても車載機1A、1B、1C、1Dから携帯機2へ送信することが可能となる。高周波数の搬送波で通信を行う携帯機2から車載機1A、1B、1C、1Dへの通信においては、高周波数の搬送波による変調に適したFSK変調を用いることによって、ノイズによる影響を受けにくくなり、携帯機2から車載機1A、1B、1C、1Dへの情報を損失することなく確実に送信することが可能となる。
【0091】
また、車載機1A、1B、1C、1Dから携帯機2への通信、及び携帯機2から車載機1A、1B、1C、1Dへの通信においてスペクトラム拡散にて通信を行うことにより、当該スペクトラム拡散にて送信された信号の秘匿性を高めることができ、また、妨害波・干渉波等に対する排除能力を著しく高めることができる。
【0092】
また、位相差を検出するためのタイマ5A、5B、5C、5Dと、所定周波数のクロックでカウントするカウンタ4A、4B、4C、4Dと、カウント値に基づいてCPU3A、3B、3C、3Dが車載機1A、1B、1C、1Dと携帯機2との間の距離を算出する基となる情報が記憶されているFlashメモリ6A、6B、6C、6Dとを用いて、CPU3A、3B、3C、3Dが車載機1A、1B、1C、1Dと携帯機2との複数の距離を算出することを確実に行うことが可能となる。また、各タイマ及び各カウンタが、CPU3A、3B、3C、3Dが距離算出用信号を送信するごとにリセットされることにより、CPU3A、3B、3C、3Dが送信したときの距離算出用信号と、受信したときの前記CPU3A、3B、3C、3Dが送信した距離算出用信号と同じ距離算出用信号と、から車載機1A、1B、1C、1Dと携帯機2の間の複数の距離をCPU3A、3B、3C、3Dが確実に算出することが可能となる。
【0093】
また、CPU3A、3B、3C、3Dにて算出された携帯機2との間の複数の距離が予め定められた距離以上であるとCPU90が判別したとき、警報部(不図示)を動作させて警報を発することが可能となる。したがって、CPU90が前述した判別をしたとき、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2との通信が行われていることを携帯者に知らせることが可能となる。
【0094】
また、CPU3A、3B、3C、3Dにて算出された携帯機2との間の複数の距離が予め定められた距離以上であるとCPU90が判別したとき、モニタ92に携帯機2′の位置を表示させることが可能となる。したがって、CPU90が前述した判別をしたとき、中継機Aを介して車載機1A、1B、1C、1Dと携帯機2との通信が行われていること、及び当該携帯機2′の位置を知らせることが可能となる。
【0095】
また、CPU90が、CPU3A、3B、3C、3Dにて算出された車載機1A、1B、1C、1Dと携帯機2との間の複数の距離が予め定められた距離以上であると判別した場合、携帯機2との通信を行わなくすることが可能となる。そのため、例えば中継機Aが車載機1A、1B、1C、1Dと携帯機2との間に介在することによって通信が行われたとしても、CPU90が前述した判別をした以後の携帯機2との通信を行わなくすることができる。
【0096】
更に、車載機1A、1B、1C、1Dと携帯機2との間の複数の距離を算出することができ、当該複数の距離が予め定められた距離未満であるとCPU90が判別したとき、自動車のドアをアンロックさせることが可能となる。また、当該複数の距離が予め定められた距離以上であるとCPU90が判別したとき、自動車のドアをロックさせることができる。つまり、キー(自動車の鍵)を鍵穴に差し込むことなく、CPU90の判別結果により、自動車のドアのアンロック又はロックを行うことが可能となる。
【0097】
===その他の実施の形態===
以上、本発明に係る位置検出システム、位置検出通信装置、通信装置における、中継機Aの位置の検出について説明したが、上記の説明は、本発明の理解を容易とするためのものであり、本発明を限定するものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得る。
【0098】
<<位置検出システム、位置検出通信装置、通信装置のその他の形態>>
本実施形態においては、自動車の前述した位置に車載機1A、1B、1C、1Dを設けているがこれに限るものではない。
【0099】
例えば、車載機1A、1B、1C、1Dが設けられた位置に、受信部8Aと受信アンテナ10A、受信部8Bと受信アンテナ10B、受信部8Cと受信アンテナ10C、受信部8Dと受信アンテナ10Dのみを設けても良い。その場合、送信部、送信アンテナ、OSC、Flashメモリ、タイマ、カウンタを構成とする車載機を1つ設け、CPU90に統括制御させる。そして、前述したようにCPU90からの距離算出用信号が、送信部を介して送信アンテナから送信される。そしてCPU90は、携帯機2から返信される距離算出用信号を受信アンテナ10A、10B、10C、10Dを介して受信部8A、8B、8C、8Dが例えば受信した順に、当該距離算出用信号を受信した受信アンテナから携帯機2′(リレーアタックがされていない場合は携帯機2)までの距離を算出する。そして、CPU90は、算出した受信アンテナ10A、10B、10C、10Dから携帯機2までの各距離情報に基づいて携帯機2′の検出範囲、地図情報を算出するように設けても良い。
【0100】
<<位置検出システム、位置検出通信装置、通信装置の適用>>
本実施形態では、位置検出システム、位置検出通信装置、通信装置をパッシブキーレスエントリーシステム機能が搭載された自動車に用いているが、本発明の適用対象はこれに限るものではない。
【0101】
居場所を特定する必要がある人(例えば園児又は老人。以下、被監視者という)に携帯機2を持たせ、車載機1Aと同一の機能を有する監視装置を被監視者を監視する者(以下、監視者という)が管理する。そして、監視者は、監視装置からのエリア内確認信号Aに基づいて、携帯機2からエリア内確認信号Bが送信されてくるか否かを監視装置が判別することによって、被監視者が通信可能範囲内にいるか否を判断することができる。そして、被監視者が所持する携帯機2からのエリア内確認信号Bが携帯機2から送信されてこないと監視装置が判別したとき、例えば監視装置は警報(アラーム)を鳴らして監視者に被監視者が通信可能範囲から出たことを知らせる。よって、監視者による被監視者の迅速な保護を図ることが可能となる。また、各被監視者の持つ携帯機2のFlashメモリ13に識別コードを記憶させ、エリア内確認信号Bとともに当該識別コードを携帯機2から送信させるように設けても良い。そうすることによって、監視者は、被監視者のうち誰が通信可能範囲から出たのかを把握することが可能となる。更に、車載機1A、1B、1C、1Dと同一の機能を有する前述した監視装置を複数設けさせる。そして、当該複数の監視装置からエリア内確認信号Aを送信させる。仮に被監視者が通信可能範囲を出てしまった場合、当該被監視者が通信可能範囲を出る直前の複数の監視装置が受信したエリア内確認信号Bに基づいて、被監視者が通信可能範囲を出た方向を監視者が容易に知ることが可能となる。なぜならば、複数の監視装置は、エリア内確認信号Aを送信してから予め定められた時間t1内にエリア内確認信号Bが送信されてくるか否かを判別する。そのため、被監視者の最も近傍にある監視装置には、エリア内確認信号Bが最も早く送信されてくることとなる。よって、被監視者が通信可能範囲を出た方向が、当該被監視者の最も近傍にある監視装置によって判別することができる。そのため、監視者による被監視者の探索がより確実なものとなる。よって被監視者が通信可能範囲を出てしまったことによる事故を未然に防ぐことが可能となる。更に、被監視者が通信可能範囲を出てしまった場合、複数の監視装置は携帯機2からのエリア内確認信号Bが送信されてこないと判別し、距離算出用信号を送信する。そして、仮に携帯機2と複数の監視装置との間に中継機がある場合、中継機を介して当該距離算出用信号が複数の監視装置に返信される。複数の監視装置は、送信したときの距離算出用信号と携帯機2からの距離算出用信号との位相差から、前述した携帯機2′の検出範囲を算出する。そして、算出した携帯機2′の検出範囲から中継機の位置を予測することが可能となり、中継機を所持する者による被監視者の例えば誘拐等を未然に防ぐことが可能となる。
【0102】
また、例えば携帯機2を自宅のキーとして用いても良い。そして、車載機1A、1B、1C、1Dと同一の機能を有する複数の管理装置を自宅のドアに設ける。仮に携帯機2と複数の管理装置との間に中継機がある場合、複数の管理装置において算出した携帯機2と管理装置との距離が予め定められた距離未満ではないと複数の管理装置を統括制御する制御部が判別する。そのため、当該制御部は携帯機2との通信をストップさせる。よって、セキュリティー面が向上し、中継機を介して自宅への侵入を図る窃盗者等による被害を防ぐことが可能となる。同様に自宅以外の建物等へ入るときなどにも用いることが可能である。
【図面の簡単な説明】
【0103】
【図1】本発明に係る位置検出システム、位置検出通信装置、通信装置の全体構成の一例を示す図である。
【図2】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。
【図3】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すフローチャートである。
【図4】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。
【図5】距離算出用信号の変化を示す図である。
【図6】車載機1A、1B、1C、1Dによる中継機Aの位置の検出を示す図である。
【図7】本発明に係る位置検出システム、位置検出通信装置と相手側通信装置、通信装置と相手側通信装置の動作の一例を示すタイミングチャートである。
【図8】距離算出用信号の変化を示す図である。
【図9】中継機A、Bを介した車載機101と携帯機102の通信を示す図である。
【符号の説明】
【0104】
1、101 車載機
2、102 携帯機
3、11、90 CPU
4 カウンタ
5、27 タイマ
6、13 Flashメモリ
7 送信部
8 受信部
9、19 送信アンテナ
10、18 受信アンテナ
12 入力部
14 DET
15 変調器
16、17 RF
20、21、22 インバータ
23 フラグ
24 復調部
25 変調部
26 OSC
92 モニタ
【特許請求の範囲】
【請求項1】
複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、
前記複数の第1通信装置は、それぞれ、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、
ことを特徴とする位置検出システム。
【請求項2】
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号を返信する返信部を備え、
前記検出部は、
前記返信部にて返信された前記距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する、
ことを特徴とする請求項1に記載の位置検出システム。
【請求項3】
前記複数の第1通信装置は、それぞれ、
前記距離算出用信号を第1の周波数の搬送波で変調する第1変調部と、前記第2通信装置からの前記第1の周波数よりも高い第2の周波数の搬送波で変調された前記距離算出用信号を復調する第1復調部と、を有し、
前記第2通信装置は、
前記複数の第1通信装置からの前記第1変調部にて変調された前記距離算出用信号を復調する第2復調部と、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波で変調する第2変調部と、を有する、
ことを特徴とする請求項1又は請求項2に記載の位置検出システム。
【請求項4】
前記複数の第1通信装置は、それぞれ、
前記距離算出用信号を生成する生成部を有し、
前記第1送信部は、
前記返信部にて返信された前記距離算出用信号を前記複数の第1通信装置が受信するまで、前記生成部が生成する前記距離算出用信号を繰り返し送信し、
前記生成部は、
所定数の前記距離算出用信号を生成するごとに、前記距離算出用信号のパターンを変える、
ことを特徴とする請求項2又は請求項3に記載の位置検出システム。
【請求項5】
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波でASK変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にてASK変調された前記距離算出用信号を復調し、
前記第2変調部は、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波でFSK変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にてFSK変調された前記距離算出用信号を復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項6】
前記複数の第1通信装置と前記第2通信装置との通信をスペクトラム拡散を用いて行うべく、
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波で1次変調した後、前記第1の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調し、
前記第2変調部は、前記第2復調部にて逆拡散して復調された前記距離算出用信号を前記第2の周波数の搬送波で1次変調した後、前記第2の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項7】
前記複数の第1通信装置は、それぞれ、
前記第1送信部が前記距離算出用信号を送信するごとにリセットされ、前記返信部にて返信された前記距離算出用信号を前記複数の第1通信装置が受信するまでの時間を計時するタイマと、
前記タイマがリセットされるごとにリセットされ、前記検出部にて検出された前記位相差を所定周波数のクロックでカウントするカウンタと、
前記カウンタのカウント値に基づいて、前記算出部が前記第2通信装置との間の距離を算出する基となる情報が記憶された記憶部と、を有し、
前記検出部は、
前記タイマが計時する前記時間を、送信したときの前記距離算出用信号と受信したときの前記距離算出用信号との前記位相差として検出し、
前記算出部は、
前記カウンタが前記位相差を前記所定周波数のクロックでカウントしたときのカウント値と、前記記憶部に記憶された情報とに基づいて、前記第2通信装置との間の距離を算出する、
ことを特徴とする請求項2乃至請求項6の何れかに記載の位置検出システム。
【請求項8】
前記第2通信装置は、警報を発するための警報部を有し、
前記判別部は、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると判別したときの判別結果に基づいて、前記警報部が警報を発するための警報信号を送信し、
前記警報部は、
前記判別部からの前記警報信号に基づいて警報を発する、
ことを特徴とする請求項1乃至請求項7の何れかに記載の位置検出システム。
【請求項9】
前記第2通信装置は、
前記中継装置の位置を表示するための表示部を有し、
前記位置検出部は、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を示す位置情報を送信し、
前記表示部は、
前記位置検出部からの前記位置情報に基づいて前記中継装置の位置を表示する、
ことを特徴とする請求項1乃至請求項8の何れかに記載の位置検出システム。
【請求項10】
前記複数の第1通信装置は、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、前記第2通信装置との通信を停止する、
ことを特徴とする請求項1乃至請求項9の何れかに記載の位置検出システム。
【請求項11】
前記複数の第1通信装置は自動車に設けられ、
前記判別部は、
前記自動車のドアのアンロック又はロックを制御する制御部に対し、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であると前記判別部が判別したときの判別結果を、前記ドアをアンロックするための信号として供給し、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果を、前記ドアをロックするための信号として供給する、
ことを特徴とする請求項1乃至請求項10の何れかに記載の位置検出システム。
【請求項12】
第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該第1通信装置と当該第2通信装置とが通信不能となった状態において、前記第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、
前記第1通信装置は、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、
前記検出部にて検出された前記複数の位相差に基づいて、前記第2通装置との間の前記複数の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、
前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、
ことを特徴とする位置検出システム。
【請求項13】
複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムの位置検出方法であって、
前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、
前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、
前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、
前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別し、
前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると判別したとき、このときの前記複数の距離に応じた前記中継装置の位置を検出する、
ことを特徴とする位置検出システムの位置検出方法。
【請求項14】
相手側通信装置との間の複数の距離が予め定められた距離以上となることによって当該相手側通信装置と通信不能となった状態において、前記相手側通信装置と通信可能とさせる中継装置の位置検出通信装置であって、
前記相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、
前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の距離算出通信装置を備え、
前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、
前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、
ことを特徴とする位置検出通信装置。
【請求項15】
距離を算出するための距離算出用信号を送信し、
返信されてきた前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出し、
前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、
前記複数の距離算出通信装置にて算出された複数の距離が予め定められた距離以上となることによって、前記送信位置からの前記距離算出用信号に応じた信号を受信不能となった状態において、前記複数の距離算出通信装置に前記送信位置からの前記距離算出用信号に応じた信号を受信可能とさせる中継装置の位置を検出すべく、
当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離未満であるか否かを判別し、
当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離以上であると判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する、相手側通信装置と通信可能であって、
前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、
ことを特徴とする通信装置。
【請求項1】
複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、
前記複数の第1通信装置は、それぞれ、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記第2通信装置との間の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、
ことを特徴とする位置検出システム。
【請求項2】
前記第2通信装置は、
前記複数の第1通信装置から送信された前記距離算出用信号を返信する返信部を備え、
前記検出部は、
前記返信部にて返信された前記距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する、
ことを特徴とする請求項1に記載の位置検出システム。
【請求項3】
前記複数の第1通信装置は、それぞれ、
前記距離算出用信号を第1の周波数の搬送波で変調する第1変調部と、前記第2通信装置からの前記第1の周波数よりも高い第2の周波数の搬送波で変調された前記距離算出用信号を復調する第1復調部と、を有し、
前記第2通信装置は、
前記複数の第1通信装置からの前記第1変調部にて変調された前記距離算出用信号を復調する第2復調部と、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波で変調する第2変調部と、を有する、
ことを特徴とする請求項1又は請求項2に記載の位置検出システム。
【請求項4】
前記複数の第1通信装置は、それぞれ、
前記距離算出用信号を生成する生成部を有し、
前記第1送信部は、
前記返信部にて返信された前記距離算出用信号を前記複数の第1通信装置が受信するまで、前記生成部が生成する前記距離算出用信号を繰り返し送信し、
前記生成部は、
所定数の前記距離算出用信号を生成するごとに、前記距離算出用信号のパターンを変える、
ことを特徴とする請求項2又は請求項3に記載の位置検出システム。
【請求項5】
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波でASK変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にてASK変調された前記距離算出用信号を復調し、
前記第2変調部は、前記第2復調部にて復調された前記距離算出用信号を前記第2の周波数の搬送波でFSK変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にてFSK変調された前記距離算出用信号を復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項6】
前記複数の第1通信装置と前記第2通信装置との通信をスペクトラム拡散を用いて行うべく、
前記第1変調部は、前記距離算出用信号を前記第1の周波数の搬送波で1次変調した後、前記第1の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第2復調部は、前記複数の第1通信装置からの前記第1変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調し、
前記第2変調部は、前記第2復調部にて逆拡散して復調された前記距離算出用信号を前記第2の周波数の搬送波で1次変調した後、前記第2の周波数の搬送波で1次変調された前記距離算出用信号を2次(拡散)変調し、
前記第1復調部は、前記第2通信装置からの前記第2変調部にて2次(拡散)変調された前記距離算出用信号を逆拡散して復調する、
ことを特徴とする請求項3又は請求項4に記載の位置検出システム。
【請求項7】
前記複数の第1通信装置は、それぞれ、
前記第1送信部が前記距離算出用信号を送信するごとにリセットされ、前記返信部にて返信された前記距離算出用信号を前記複数の第1通信装置が受信するまでの時間を計時するタイマと、
前記タイマがリセットされるごとにリセットされ、前記検出部にて検出された前記位相差を所定周波数のクロックでカウントするカウンタと、
前記カウンタのカウント値に基づいて、前記算出部が前記第2通信装置との間の距離を算出する基となる情報が記憶された記憶部と、を有し、
前記検出部は、
前記タイマが計時する前記時間を、送信したときの前記距離算出用信号と受信したときの前記距離算出用信号との前記位相差として検出し、
前記算出部は、
前記カウンタが前記位相差を前記所定周波数のクロックでカウントしたときのカウント値と、前記記憶部に記憶された情報とに基づいて、前記第2通信装置との間の距離を算出する、
ことを特徴とする請求項2乃至請求項6の何れかに記載の位置検出システム。
【請求項8】
前記第2通信装置は、警報を発するための警報部を有し、
前記判別部は、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると判別したときの判別結果に基づいて、前記警報部が警報を発するための警報信号を送信し、
前記警報部は、
前記判別部からの前記警報信号に基づいて警報を発する、
ことを特徴とする請求項1乃至請求項7の何れかに記載の位置検出システム。
【請求項9】
前記第2通信装置は、
前記中継装置の位置を表示するための表示部を有し、
前記位置検出部は、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を示す位置情報を送信し、
前記表示部は、
前記位置検出部からの前記位置情報に基づいて前記中継装置の位置を表示する、
ことを特徴とする請求項1乃至請求項8の何れかに記載の位置検出システム。
【請求項10】
前記複数の第1通信装置は、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、前記第2通信装置との通信を停止する、
ことを特徴とする請求項1乃至請求項9の何れかに記載の位置検出システム。
【請求項11】
前記複数の第1通信装置は自動車に設けられ、
前記判別部は、
前記自動車のドアのアンロック又はロックを制御する制御部に対し、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であると前記判別部が判別したときの判別結果を、前記ドアをアンロックするための信号として供給し、
前記複数の第1通信装置の複数の前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果を、前記ドアをロックするための信号として供給する、
ことを特徴とする請求項1乃至請求項10の何れかに記載の位置検出システム。
【請求項12】
第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該第1通信装置と当該第2通信装置とが通信不能となった状態において、前記第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムであって、
前記第1通信装置は、
前記第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を受信する複数の受信部と、
前記第2通信装置からの前記距離算出用信号に応じた信号を前記複数の受信部が受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の複数の位相差を検出する検出部と、
前記検出部にて検出された前記複数の位相差に基づいて、前記第2通装置との間の前記複数の距離を算出する算出部と、を備え、
前記第2通信装置は、
前記第1通信装置から送信された前記距離算出用信号に応じた信号を送信する第2送信部を備え、
更に、前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、
前記算出部にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、
ことを特徴とする位置検出システム。
【請求項13】
複数の第1通信装置と第2通信装置との間の複数の距離が予め定められた距離以上となることによって当該複数の第1通信装置と当該第2通信装置とが通信不能となった状態において、前記複数の第1通信装置と前記第2通信装置とを通信可能とさせる中継装置の位置検出システムの位置検出方法であって、
前記複数の第1通信装置はそれぞれ、前記第2通信装置との間の距離を算出するための距離算出用信号を送信し、
前記第2通信装置は、前記複数の第1通信装置から送信された前記距離算出用信号に応じた信号を送信し、
前記複数の第1通信装置はそれぞれ、前記第2通信装置からの前記距離算出用信号に応じた信号を受信することによって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出し、当該位相差に基づいて前記第2通信装置との間の距離を算出し、
前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別し、
前記複数の第1通信装置にて算出された前記第2通信装置との間の前記複数の距離が前記予め定められた距離以上であると判別したとき、このときの前記複数の距離に応じた前記中継装置の位置を検出する、
ことを特徴とする位置検出システムの位置検出方法。
【請求項14】
相手側通信装置との間の複数の距離が予め定められた距離以上となることによって当該相手側通信装置と通信不能となった状態において、前記相手側通信装置と通信可能とさせる中継装置の位置検出通信装置であって、
前記相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、
前記相手側通信装置からの前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出する検出部と、
前記検出部にて検出された前記位相差に基づいて、前記相手側通信装置との間の距離を算出する算出部と、を有する複数の距離算出通信装置を備え、
前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離未満であるか否かを判別する判別部と、
前記複数の距離算出通信装置の複数の前記算出部にて算出された前記相手側通信装置との間の前記複数の距離が前記予め定められた距離以上であると前記判別部が判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する位置検出部と、を有する、
ことを特徴とする位置検出通信装置。
【請求項15】
距離を算出するための距離算出用信号を送信し、
返信されてきた前記距離算出用信号に応じた信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号に応じた信号と、の位相差を検出し、
前記位相差に基づいて前記距離算出用信号に応じた信号の送信位置との距離を算出する、複数の距離算出通信装置を有し、
前記複数の距離算出通信装置にて算出された複数の距離が予め定められた距離以上となることによって、前記送信位置からの前記距離算出用信号に応じた信号を受信不能となった状態において、前記複数の距離算出通信装置に前記送信位置からの前記距離算出用信号に応じた信号を受信可能とさせる中継装置の位置を検出すべく、
当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離未満であるか否かを判別し、
当該複数の距離算出通信装置が算出した前記複数の距離が前記予め定められた距離以上であると判別したときの判別結果に基づいて、このときの前記複数の距離に応じた前記中継装置の位置を検出する、相手側通信装置と通信可能であって、
前記相手側通信装置から送信された前記距離算出用信号に応じた信号を送信する送信部を備えた、
ことを特徴とする通信装置。
【図1】


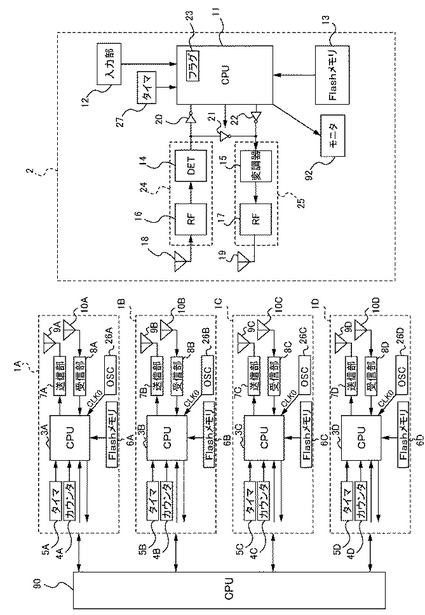
【図2】
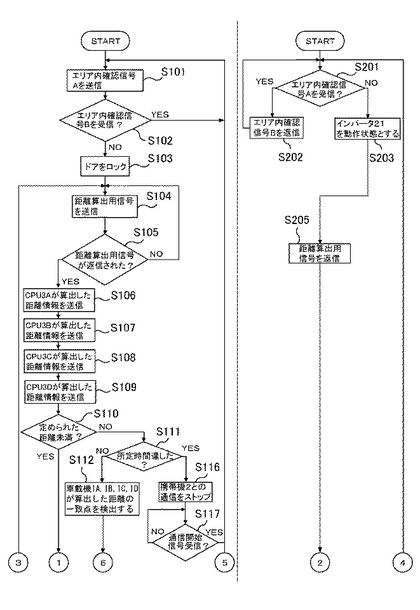
【図3】
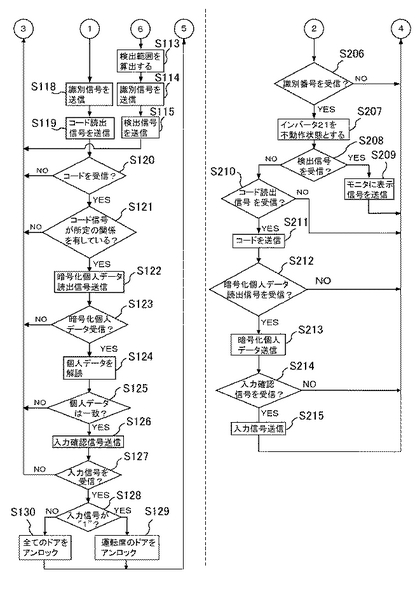
【図4】
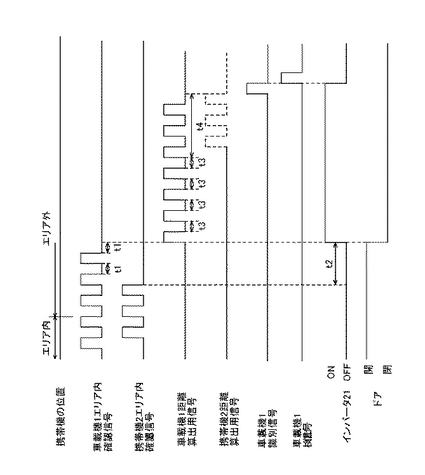
【図5】
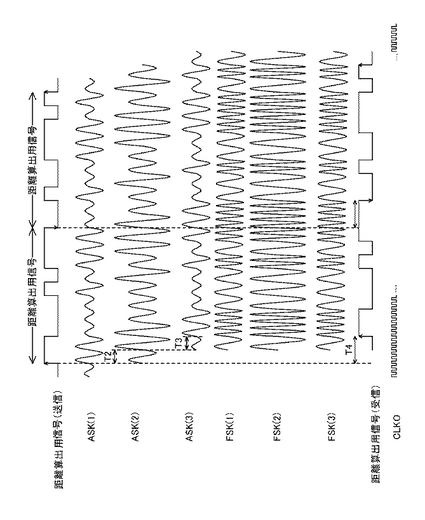
【図6】
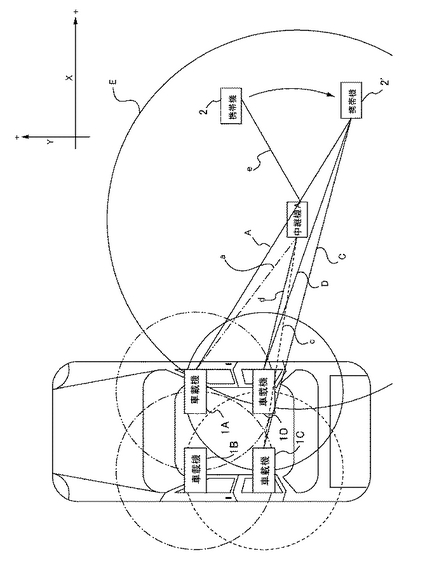
【図7】
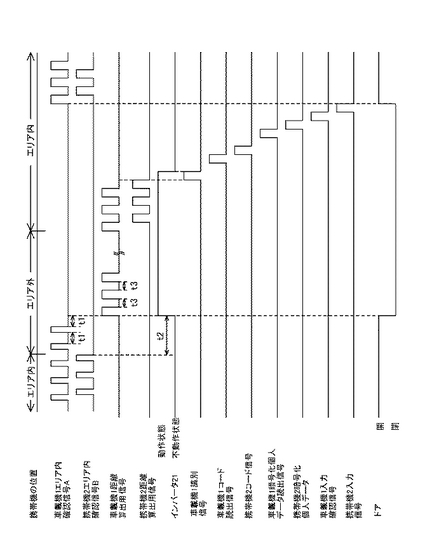
【図8】
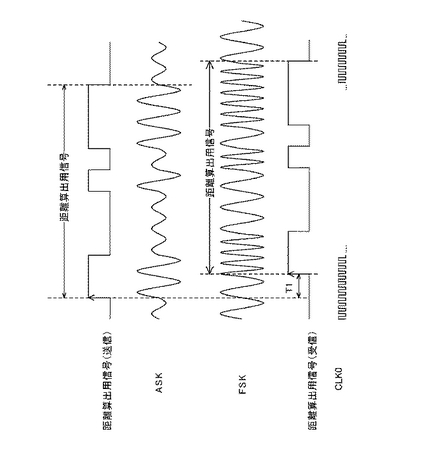
【図9】
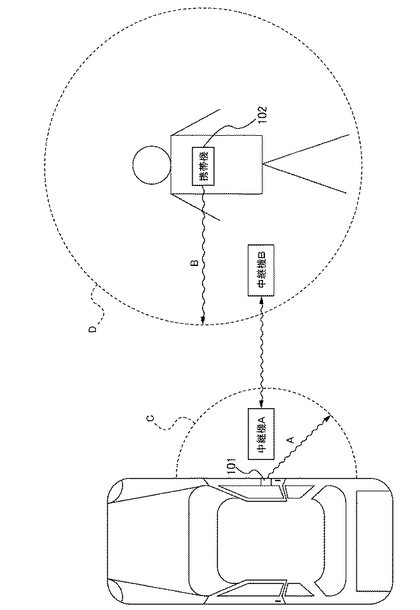
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−118889(P2006−118889A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2004−304762(P2004−304762)
【出願日】平成16年10月19日(2004.10.19)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願日】平成16年10月19日(2004.10.19)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]