
位置検出システム、方法、記憶媒体、及びプログラム
【課題】投射光領域の輪郭が不明瞭な場合でも、移動体の正確な位置を検出する。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出システム、方法、記憶媒体、及びプログラムに関する。
【背景技術】
【0002】
移動体の位置を検出する技術として、画像処理、無線タグ、光タグを用いる方法がある。例えば、画像処理による検出では、移動可能な自律ロボットが搭載するカメラで、天井の画像を得て現在位置を特定したり、カメラで撮影した画像から車イス領域を推定し、辞書画像と比較することによって車イスの有無を判定することなどが提案されている。また、無線タグによる検出では、車椅子使用者が無線タグを所持しておくことによりエレベータ乗り場で実際にエレベータを待つ車椅子使用者を検出できるようにすることなどが提案されている。更に、光タグの位置検出では、正三角形や円形の光を天井に投射し、カメラで三角形の頂点座標や楕円の長短軸を検出することで、移動体の位置を推定することなどが提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−257226号公報
【特許文献2】再公表2002−056251号公報
【特許文献3】特開2007−45559号公報
【特許文献4】特開2005−17203号公報
【特許文献5】特表2007−530978号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、辞書画像と比較する従来技術では、例えば、車イスの種類、車イス利用者の服装、車イスの姿勢、大きさ、照明変化、オクルージョン、背景変化などの影響で、一般的に検出精度が低く、車イスなどの運搬補助車の有無判定は、実質上、実現困難である。また、カメラで読み取った天井に投影された画像から3点以上の光点の正確な位置を検出する場合、投影図形が不明瞭である、カメラの解像度が低いなど、空間分解能が低くなると正確な位置を算出できないと言った問題がある。カメラを運搬補助車に装着させた場合、カメラサイズ、電源、検出した位置の受け渡し手段が問題となる。
【課題を解決するための手段】
【0005】
開示の技術は、移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とを有するように構成される。
【0006】
開示の技術は、コンピュータによって行なわれる位置検出方法、上記手段を機能としてコンピュータに実行させるためのプログラムを記憶したコンピュータ読み取り可能な記憶媒体、及び、そのプログラムとすることもできる。
【発明の効果】
【0007】
開示の技術では、光源の姿勢が鉛直になったときの天井への投射光を利用するため、投射光領域の輪郭が不明瞭な場合でも、運搬補助車の位置を正確に検出できる。
【図面の簡単な説明】
【0008】
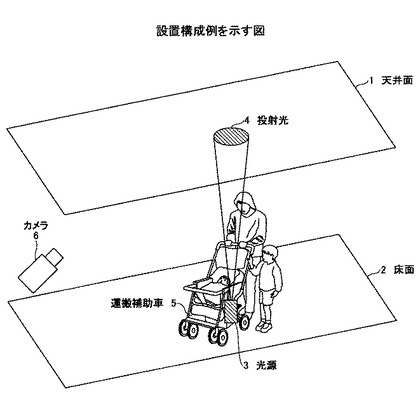
【図1】設置構成例を示す図である。
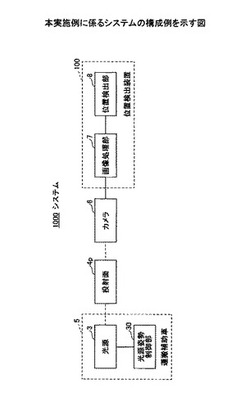
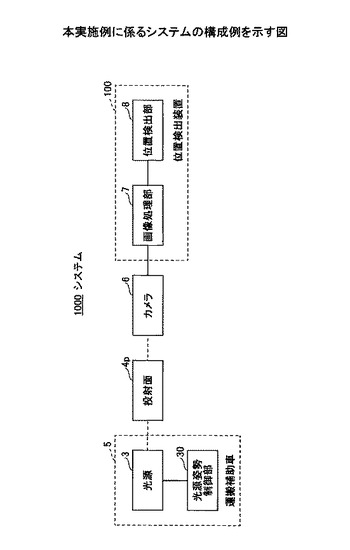
【図2】本実施例に係るシステムの構成例を示す図である。
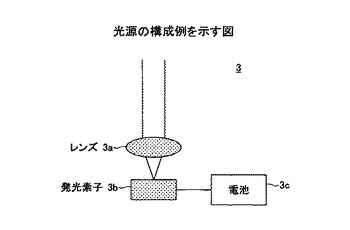
【図3】光源の構成例を示す図である。
【図4】光源姿勢制御部の構成例を示す図である。
【図5】光源姿勢制御部の他の構成例を示す図である。
【図6】位置検出装置のハードウェア構成を示すブロック図である。
【図7】画像処理部による投射光の画像領域を抽出する方法を説明するための図である。
【図8】図7での処理フローを説明するための図である。
【図9】位置検出部による運搬補助車の位置を検出する処理フローを説明するための図である。
【図10】校正処理を説明するための図である。
【図11】校正処理の全体処理フローを説明するための図である。
【図12】鉛直姿勢を検出する構成を有するシステム構成例を示す図である。
【図13】図12(A)に示す鉛直姿勢検出部の構成例を示す図である。
【図14】図12(B)に示す構成例における処理フローを説明するための図である。
【図15】図14の処理フローによる出力結果例を示す図である。
【図16】移動・静止判定部を加えたシステム構成例を示す図である。
【図17】図16のシステム構成例における処理フローを説明するための図である。
【図18】投射光のマトリクスパターンの例を示す図である。
【図19】パルス光のパターンを示す図である。
【図20】凸形状パターンの投射光の生成するための光源の例を示す図である。
【図21】画像処理部による正面方向を得る方法について説明するための図である。
【図22】投射光が遮蔽されことを通知する構成例を示す図である。
【図23】投射光の領域を見失った場合の再探索する方法を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づいて説明する。図1は、設置構成例を示す図である。図1に示すように、床面2上を移動するベビーカー、車イス、ショッピングカートなどの運搬補助車5に装着された光源3から天井面1へ投射された投射光4を、上方に向けて取り付けたカメラ6で撮影する。
【0010】
図2は、本実施例に係るシステムの構成例を示す図である。図2に示すシステム1000は、天井面1へ光を投射する光源3と、光源3の姿勢を鉛直上向きに保持するための光源姿勢制御部30と、天井面1などの投射面4pへ照射された光を撮影するためのカメラ6と、画像中から光の照射領域を抽出する画像処理部7と、照射領域の位置から床面2における運搬補助車5の位置を取得する位置検出部8とを有する。
【0011】
光源3は光源姿勢制御部30によって運搬補助車5に装着され、画像処理部7と位置検出部8とは位置検出装置100として機能するコンピュータによって実現される。
【0012】
図3は、光源の構成例を示す図である。図3において、光源3は、レンズ3aと、発光素子3bと、電池3cとを有する。発光素子3bから出た光は、レンズ3aを通過して天井面1などの投射面4pへ照射される。発光素子3bには、LEDやレーザなどを用いる。また、発光素子3bから照射される光を赤外光にすると、不可視となり、利用者が意識することなく使用することができる。
【0013】
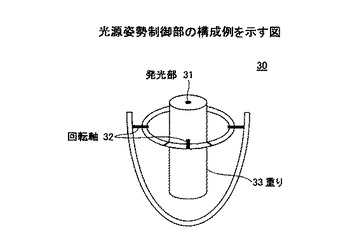
図4は、光源姿勢制御部の構成例を示す図である。図4に示す機械式の姿勢保持機構では、光源姿勢制御部30は、直交する2つ回転軸32と重り33とによって、発光部31が常に上向きになるように保持される。よって、光源3から照射される光が常に鉛直上向きになるように、光源3の姿勢が保持される。
【0014】
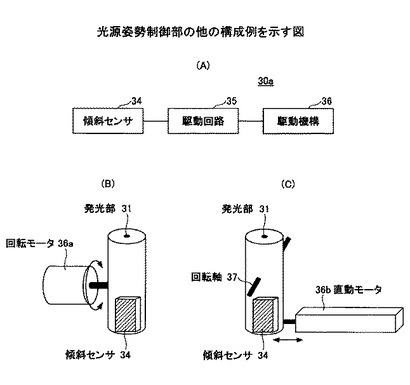
図5は、光源姿勢制御部の他の構成例を示す図である。モータなどの駆動機構を用いた光源姿勢制御部の構成例を示している。図5(A)に示すように、光源姿勢制御部30aの姿勢制御機構は、傾斜センサ34と、駆動回路35と、駆動機構36とを有する。光源3に装着された傾斜センサ34によって、光源3の投射方向の鉛直軸からのずれを検出する。駆動回路35では、ずれ量を検出すると、ずれがゼロになるように駆動機構36を制御する。駆動機構36は、例えば、図5(B)及び図5(C)に示すように、回転モータ36aや直動モータ36bを用いる。こうした駆動機構36を2軸用意し、駆動方向を直交させることで、発光部が常に上向きになるように保持することができる。
【0015】
図1及び図2より、カメラ6は、天井面1への投射光が撮影可能なように上方に向けて設置する。光源3からの投射光(赤外光)と天井照明光とを区別するため、赤外光のみを透過するような光学フィルタをカメラ6に装着してもよい。
【0016】
画像処理部7は、カメラ6で取得した天井面1の画像の中から投射光の画像領域を抽出する処理部である。
【0017】
位置検出部8は、画像処理部7によって抽出された投射光の画像領域から床面2上の運搬補助車5の位置を検出する処理部である。
【0018】
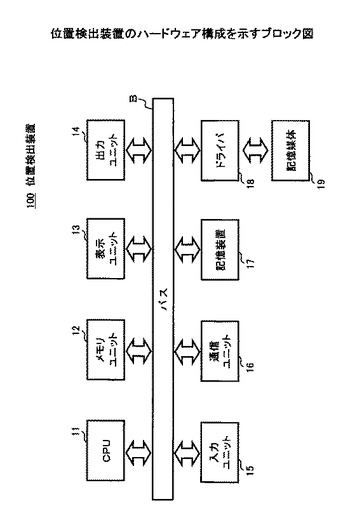
画像処理部7と位置検出部8とを有する位置検出装置100は、例えば、図6に示すようなハードウェア構成を有する。図6は、位置検出装置のハードウェア構成を示すブロック図である。
【0019】
図6において、位置検出装置100は、コンピュータによって制御される端末であって、CPU(Central Processing Unit)11と、メモリユニット12と、表示ユニット13と、出力ユニット14と、入力ユニット15と、通信ユニット16と、記憶装置17と、ドライバ18とを有し、システムバスBに接続される。
【0020】
CPU11は、メモリユニット12に格納されたプログラムに従って位置検出装置100を制御する。メモリユニット12には、RAM(Random Access Memory)及びROM(Read-Only Memory)等が用いられ、CPU11にて実行されるプログラム、CPU11での処理に必要なデータ、CPU11での処理にて得られたデータ等を格納する。また、メモリユニット12の一部の領域が、CPU11での処理に利用されるワークエリアとして割り付けられている。
【0021】
表示ユニット13は、CPU11の制御のもとに必要な各種情報を表示する。出力ユニット14は、プリンタ等を有し、ユーザーからの指示に応じて各種情報を出力するために用いられる。入力ユニット15は、マウス、キーボード等を有し、ユーザーが位置検出装置100が処理を行なうための必要な各種情報を入力するために用いられる。通信ユニット16は、例えばインターネット、LAN(Local Area Network)等に接続し、外部装置との間の通信制御をするための装置である。記憶装置17には、例えば、ハードディスクユニットが用いられ、各種処理を実行するプログラム等のデータを格納する。
【0022】
位置検出装置100によって行われる処理を実現するプログラムは、例えば、CD−ROM(Compact Disc Read-Only Memory)等の記憶媒体19によって位置検出装置100に提供される。即ち、プログラムが保存された記憶媒体19がドライバ18にセットされると、ドライバ18が記憶媒体19からプログラムを読み出し、その読み出されたプログラムがシステムバスBを介して記憶装置17にインストールされる。そして、プログラムが起動されると、記憶装置17にインストールされたプログラムに従ってCPU11がその処理を開始する。尚、プログラムを格納する媒体としてCD−ROMに限定するものではなく、コンピュータが読み取り可能な媒体であればよい。本実施例に係る処理を実現するプログラムは、通信ユニット16によってネットワークを介してダウンロードし、記憶装置17にインストールするようにしても良い。また、USB対応の位置検出装置100であれば、USB接続可能な外部記憶装置からインストールするようにしても良い。更に、SDカード等のフラッシュメモリ対応の位置検出装置100であれば、そのようなメモリカードからインストールするようにしても良い。
【0023】
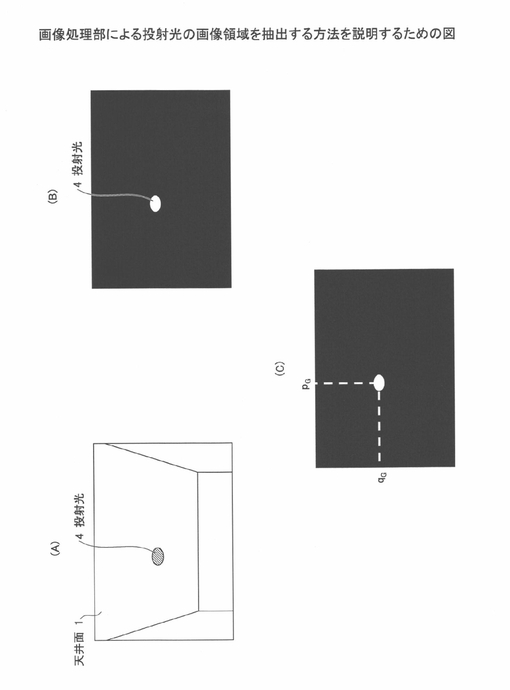
次に、位置検出装置100における画像処理部7と位置検出部8とによって行われる処理について、図7及び図8で説明する。図7は、画像処理部による投射光の画像領域を抽出する方法を説明するための図である。図7では、投射光の画像領域の抽出に背景差分法を用いた例を示している。背景差分法では、予め取得済みの背景画像と、カメラ6で取得した画像とを比較し、背景画像に写っていない部分を抽出する。尚、背景画像は、背景のみが映っている状態を取得した画像であり、位置検出装置100の記憶領域に格納されている。
【0024】
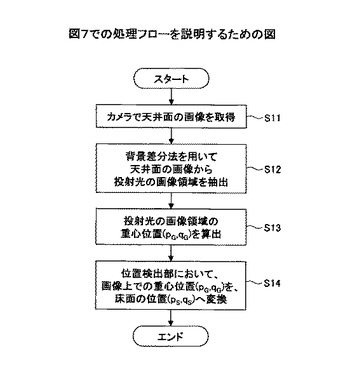
図8は、図7での処理フローを説明するための図である。図8において、カメラ6は天井面1の画像を取得して、位置検出装置100の画像処理部7へ転送する(ステップS11)。図7(A)は、カメラ6で取得した画像例を示している。この画像例から、画像処理部7は、運搬補助車5から天井面1へ照射された投射光4の画像領域を抽出する(ステップS12)。投射光4の画像領域の抽出には、背景差分法を用いる。背景差分法では、予め取得済みの背景画像と、カメラ6で取得した画像とを比較し、背景画像に写っていない部分を抽出する。尚、背景画像は、背景のみが映っている状態を取得した画像であり、予め記憶装置17に格納されている。
【0025】
最も単純な背景差分処理は、それぞれの画像において、同一位置の画素の輝度を比較し、輝度差が一定値以上の場合は、非背景と判定する方法である。背景画像IB、取得画像ICの横方向p、縦方向qの輝度を、
IB(p、q)、IC(p、q)
とする。このとき、輝度の差分値が閾値ITH以上であれば、非背景と判断する。
【0026】
【数1】

非背景と判定された画素のみを抽出し、新たに画像を生成すると、背景画像に写っていない物体を抽出できる。背景差分処理後の画像IDの画素(p、q)を次のように設定する。
【0027】
【数2】
上述の処理により、輝度が255となる画像領域を投射光領域と見做すことによって、例えば、図7(B)に示されるように投射領域が抽出される。
【0028】
次に、画像処理部7は、投射光4の画像領域の重心位置を求める(ステップS13)。投射光領域RDに含まれる画素数をNとしたとき、横方向の重心位置pG及び縦方向の重心位置qGは、図7(C)に示すように特定され、次式で与えられる。
【0029】
【数3】
【0030】
画像処理部7によって求められた横方向の重心位置pG及び縦方向の重心位置qGを用いて、位置検出部8は、床面2での運搬補助車5の位置へと変換する(ステップS14)。
【0031】
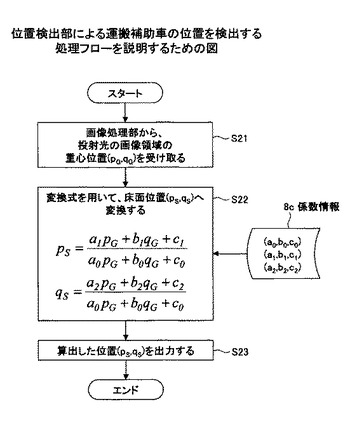
図9は、位置検出部による運搬補助車の位置を検出する処理フローを説明するための図である。図9において、位置検出部8は、画像処理部7から投射光の画像領域の重心位置(pG、qG)を受け取る(ステップS21)。
【0032】
図8に示すように、投射光の画面上の位置は、一般に床面2上の位置を表していない。そこで、画像中の位置を、床面2上の位置へ変換する必要がある。床面2の任意の点S(pS、qS)と、カメラ6で取得した画像中の点T(pT、qT)は、射影変換を適用することで対応付けができる。位置検出部8は、射影変換を行う変換式を用いて、床面位置(pS、qS)へ変換する(ステップS22)。射影変換については後述される。
【0033】
【数4】
【0034】
係数(a0、b0、c0)、(a1、b1、c1)、及び(a2、b2、c2)は、カメラ6を設置する際、予め図10及び図11で後述される校正処理を行って求めておき、係数情報8cとして記憶領域に格納されている。
【0035】
位置検出部8は、記憶領域から係数情報8cを読み込んで得られた係数(a0、b0、c0)、(a1、b1、c1)、(a2、b2、c2)を用いることで、画像処理部7で検出した投射光の位置(pG、qG)を、数4によって床面における運搬補助車5の位置(pS、qS)へ変換することができる。そして、位置検出部8は、算出した位置(pS、qS)を出力する(ステップS23)。
【0036】
次に、校正処理について図10及び図11で説明する。図10は、校正処理を説明するための図である。図11は、校正処理の全体処理フローを説明するための図である。
【0037】
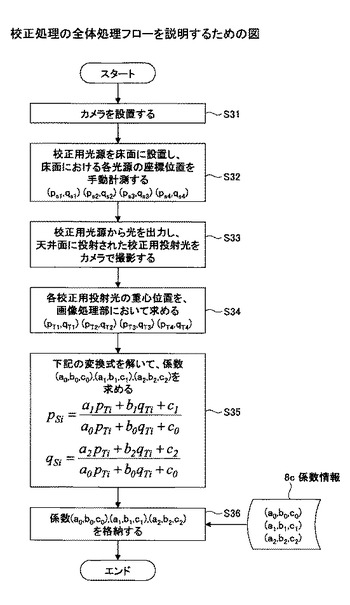
図10を参照しつつ、図11の全体フローを説明する。図11において、カメラ6を天井面1を撮影可能に設置する(ステップS31)。
【0038】
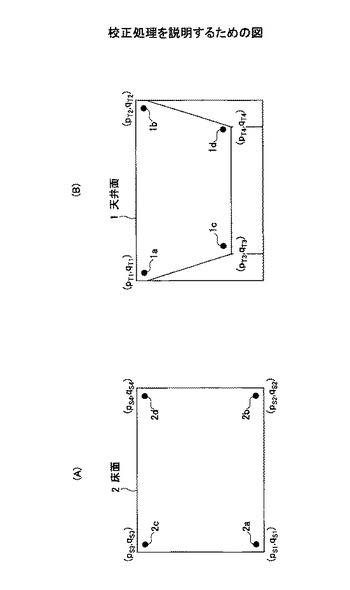
校正用光源2a、2b、2c、及び2dを床面2に設置し、床面2における各光源の座標位置を手動計測する(ステップS32)。図10(A)に示すような床面2の校正用光源2a、2b、2c、及び2dの位置として、座標位置(ps1、qs1)、(ps2、qs2)、(ps3、qs3)、及び(ps4、qs4)が計測される。
【0039】
校正用光源2a、2b、2c、及び2dは、例えば、床面2の四隅に夫々設置される。校正用光源2a、2b、2c、及び2dから光を出力し、天井面1に投射された4箇所の校正用投射光1a、1b、1c、及び1dをカメラ6から撮影する(ステップS33)。
【0040】
カメラ6で撮影された画像は画像処理部6に転送され、画像処理部6は転送された画像から上述した背景差分法を用いて各校正用投射光1a、1b、1c、及び1dの重心位置を求める(ステップS34)。図10(B)に示すような天井面1の校正用投射光1a、1b、1c、及び1dの重心位置として、(pT1、qT1)、(pT2、qT2)、(pT3、qT3)、及び(pT4、qT4)が計算される。
【0041】
画像処理部6は、下記の変換式を解いて、
【0042】
【数5】
係数(a0、b0、c0)、(a1、b1、c1)、(a2、b2、c2)を求め(ステップS35)、係数情報8cとして位置検出部7によって読み出される記憶領域に記憶する(ステップS36)。
【0043】
[光源の揺れ制御]
次に、光源の揺れを制御し検出精度を向上させる構成について説明する。床面2に凹凸がある、或いは、運搬補助車5を急に加減速するなどの操作を行うと、光源の揺れが大きくなり、重りを装着して鉛直姿勢に保持する構成だけでは正確な位置を検出できない場合がある。そこで、光源の姿勢が鉛直姿勢になったことを検出する鉛直姿勢検出部を設けることで、検出精度を向上させる。
【0044】
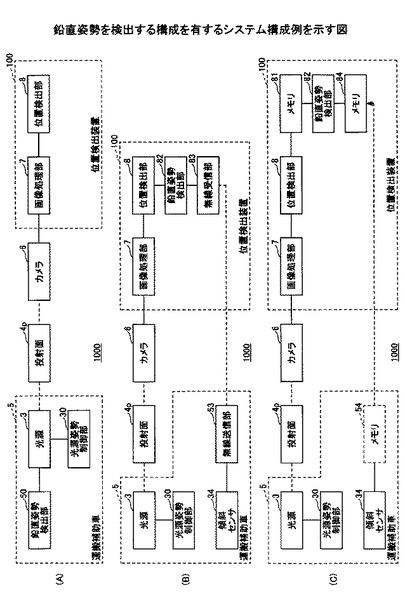
図12は、鉛直姿勢を検出する構成を有するシステム構成例を示す図である。図12中、図2に示す同様の構成部分には同一の符号を付し、その説明を省略する。以下、図12(A)、図12(B)、及び図12(C)に示すシステム構成例におけるそれぞれの処理概要を説明する。
【0045】
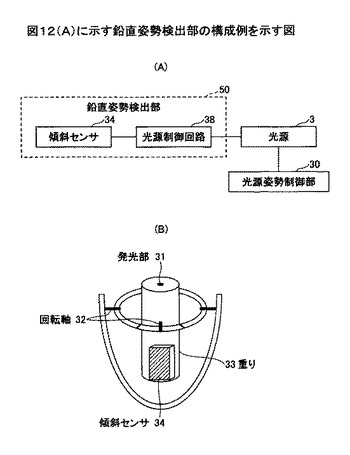
図12(A)では、運搬補助車5は、光源3と、光源3の光源姿勢制御部30と、光源3の鉛直姿勢を検出する鉛直姿勢検出部50とを有する構成を示している。図13は、図12(A)に示す鉛直姿勢検出部の構成例を示す図である。図13(A)において、鉛直姿勢検出部50は、傾斜センサ34と、光源制御回路38とを有する。傾斜センサ34は、例えば、図13(B)に示すように、重り33の側面に装着される。
【0046】
傾斜センサ34は、光源3の姿勢角を検出する。光源制御回路38は、姿勢角に応じて、発光/非発光を制御する。例えば、姿勢角θが一定範囲内にある場合に光源を発光するように動作する場合、鉛直方向のときの姿勢角を0度とし、姿勢角θが角度の閾値α度よりも小さい場合に発光するように制御するとよい。
【0047】
【数6】
上述のような鉛直姿勢検出部50を設けることによって、光源3が鉛直姿勢のときのみ天井面1へ光が投射されるため、図9の処理フローに従うだけで、運搬補助車5の正確な位置を検出することができる。
【0048】
図12(B)では、鉛直姿勢検出部50の検出結果に応じて、位置検出部8の出力を制御するようにした構成例を示している。図12(B)において、運搬補助車5は、光源3と、光源3の光源姿勢制御部30と、光源3の姿勢角を検出する傾斜センサ34と、姿勢角を位置検出装置100へ無線で送信する無線送信部53とを有する。また、位置検出装置100は、画像処理部7と、位置検出部8と、鉛直姿勢検出部82と、無線受信部83とを有する。鉛直姿勢検出部82は、無線受信部83によって受信した光源3の姿勢角に基づいて光源3の鉛直姿勢を検出する処理部である。
【0049】
図12(B)に示す構成例では、まず、傾斜センサ34によって光源の姿勢角が検出される。姿勢角は、無線送信部53から電波信号へ変換されて、無線受信部83で受信される。無線受信部83では、電波信号を再び姿勢角へ変換し、鉛直姿勢検出部82へ入力する。鉛直姿勢検出部82では、姿勢角に応じて、位置検出部8の出力を制御する。例えば、鉛直方向のときの姿勢角を0度とし、姿勢角θが角度の閾値α度よりも小さい場合に位置検出部8から運搬補助車5の位置を出力するように制御するとよい。
【0050】
【数7】
上述のような鉛直姿勢検出部82を設けることによって、光源3が鉛直姿勢のときのみ位置が出力されるため、運搬補助車5の正確な位置を検出することができる。鉛直姿勢検出部82を加えた場合の処理フローを図14で説明する。
【0051】
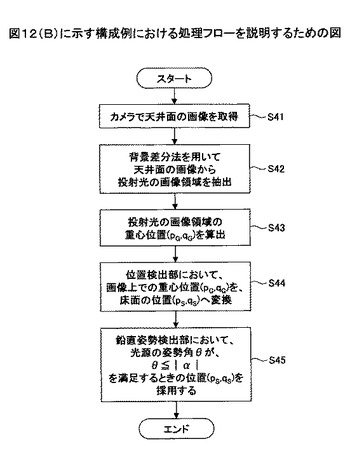
図14は、図12(B)に示す構成例における処理フローを説明するための図である。図14において、カメラ6は天井面1の画像を取得して、位置検出装置100の画像処理部7へ転送する(ステップS41)。画像処理部7は、背景差分法を用いて天井面1の画像から投射光4の画像領域を抽出して(ステップS42)、投射光4の画像領域の重心位置(pG、qG)を算出する(ステップS43)。算出された重心位置(pG、qG)は、位置検出部8へと提供される。
【0052】
位置検出部8において、画像上での重心位置(pG、qG)を床面2での運搬補助車5の位置(pS、qS)へ変換し(ステップS44)、鉛直指定検出部82へと提供される。鉛直指定検出部82において、光源の姿勢角θが、
【0053】
【数8】
を満足するときの位置(pS、qS)を採用する(ステップS45)。
【0054】
上記説明では、光源3が鉛直姿勢で無い場合は、位置検出部8から位置を出力しないとした。しかし、光源3の揺れの周期によっては、検出される位置の間隔が開くため、複数の運搬補助車5が交錯する場合など、交錯後に識別できなくなるケースが考えられる。こうしたケースに対応するため、位置検出部8から全ての位置を出力し、正確な動線を求めるときのみ、鉛直姿勢検出部82で鉛直方向と判定された位置のみ採用するようにしてもよい。
【0055】
【数9】
こうした処理を適用することで、複数の運搬補助車5が交錯してもそれぞれが識別可能となり、かつ、正確な動線を検出することができる。
【0056】
尚、図12(B)では、無線送信部53、無線受信部83を経由して姿勢角を鉛直姿勢検出部82へ受け渡しているが、図12(C)のように、位置検出部8で得た位置、および、姿勢角を一旦メモリ81へ蓄え、運搬補助車5を使用していない時間帯(例えば、夜間)に、メモリ54の情報をメモリ84へと読み出して、図12(B)と同様に処理してもよい。
【0057】
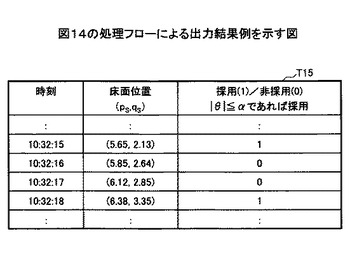
図15は、図14の処理フローによる出力結果例を示す図である。図15に示す出力結果テーブルT15は、投射光4の画像領域をカメラ6が取得した時刻に対応させて、位置検出部8によって算出された床面2での位置(pS、qS)と、鉛直姿勢検出部82によって判断された採用/非採用を示すフラグである。数8が満たされれば、採用を示す「1」が設定され、数8が満たされなければ、非採用を示す「0」が示される。
【0058】
出力結果テーブルT15の例では、フラグが「1」を示す、時刻「10:32:15」における位置(5.65、2.13)と、時刻「10:32:18」における位置(5.38、3.35)とが採用されることにより、より正確な動線を求めることができる。
【0059】
[静止位置検出]
次に、商業施設などにおいて、買い物客がどの商品に注目したのかを検出するための方法について説明する。商品に注目している買い物客の位置を検出する用途においては、静止時の位置の検出精度が高ければ、移動中の検出精度は低くてもよい。つまり、ある商品に注目した、あるいは、購入するときなどには、注目した商品を知るため高い位置検出精度が必要となる。一方、移動しているときは、商品に注目していないと考えられるため、どの通路を使用したかなどの、大まかな情報が獲得できればよい。
【0060】
床面2に凹凸がある、あるいは、運搬補助車5を急に加減速するなどの操作を行うと、光源3の揺れが大きくなるため、移動中は、正確な位置を検出できない場合がある。そこで、移動・静止判定部を設けることで、運搬補助車5が移動状態であるか、静止状態であるかを識別し、静止と判定した時の位置検出精度を高める。
【0061】
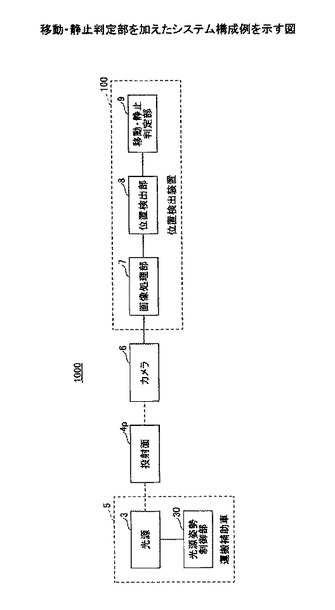
図16は、移動・静止判定部を加えたシステム構成例を示す図である。図16中、図2に示す同様の構成部分には同一の符号を付し、その説明を省略する。図16において、位置検出装置100は、更に、移動・静止判定部9を有し、移動・静止判定部9では、位置検出で得た位置が一定値に収束したときに、静止状態であると見做す。
【0062】
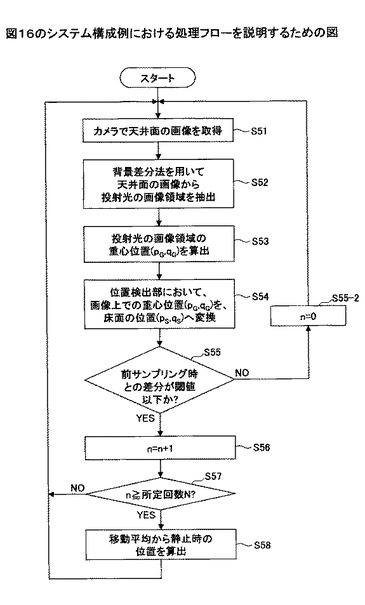
移動・静止判定部9を加えたときの処理フローを図17で説明する。図17は、図16のシステム構成例における処理フローを説明するための図である。図17において、カメラ6は天井面1の画像を取得して、位置検出装置100の画像処理部7へ転送する(ステップS51)。画像処理部7は、背景差分法を用いて天井面1の画像から投射光4の画像領域を抽出して(ステップS52)、投射光4の画像領域の重心位置(pG、qG)を算出する(ステップS53)。算出された重心位置(pG、qG)は、位置検出部8へと提供される。
【0063】
位置検出部8において、画像上での重心位置(pG、qG)を床面2での運搬補助車5の位置(pS、qS)へ変換する(ステップS54)。変換された位置(pS、qS)は、移動・静止判定部9へ提供される。
【0064】
移動・静止判定部9は、前サンプリング時との差分が閾値以下であるか否かを判断する(ステップS55)。第nサンプリング時に得た運搬補助車5の位置を(pS(n)、qS(n))とする。第n−1サンプリング時と第nサンプリング時の位置の差分d(n)は、
【0065】
【数10】
となる。差分d(n)が、N回連続して、閾値dthよりも小さな値をとったときに、静止したと判定する。移動・静止判定部9は、差分d(n)が閾値dth以下であるか否かを判断する(ステップS56)。移動・静止判定部9は、差分d(n)が閾値dthを越える場合、サンプリング回数nをゼロに初期化して、ステップS51へと戻り、上述同様の処理を行う(ステップS55−2)。差分d(n)が閾値dth以下である場合、移動・静止判定部9は、サンプリング回数nを1加算して(ステップS56)、サンプリング回数nが所定回数N以上であるか否かを判断する(ステップS57)。サンプリング回数nが所定回数Nより少ない場合、ステップS51へ戻り、上述同様の処理を行う。
【0066】
サンプリング回数nが所定回数N以上である場合、移動・静止判定部9は、移動平均から静止時の位置を算出し(ステップS58)、ステップS51へ戻り、上述同様の処理を行う。
【0067】
ステップS55からS57での処理は、下記数式11で表される。
【0068】
【数11】
【0069】
また、静止状態において、位置検出部8で得た位置の移動平均を算出すると、微小な揺れの影響を低減することができるため、より検出精度を上げることが可能となる。ステップS55での処理は、移動平均で用いるサンプル数をM個とすると、算出される運搬補助車5の位置(pavg、qavg)は、
【0070】
【数12】
で表される。
【0071】
[投射光パターン]
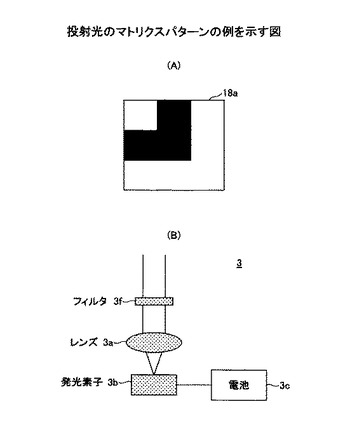
光源3を識別する仕組みについて説明する。図18は、投射光のマトリクスパターンの例を示す図である。図18(A)に示すように、投射光4をマトリクスパターン18aとし、縦横列の各要素を発光/非発光とすることで光源3を識別する。例えば、図18(B)に示すように、マトリクスパターンは、光源3のレンズ3a後段に明暗パターンを持つフィルタ3fなどを挿入することで実現する。他の構成部分については図3と同様であるので同一符号を付し、その説明を省略する。
【0072】
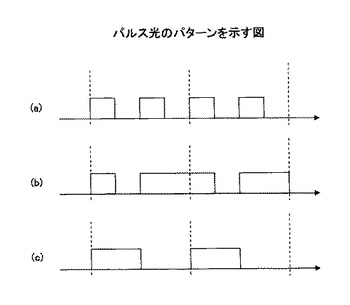
図19は、パルス光のパターン例を示す図である。図19において、光をパルス状に出力し、発光と非発光の時間間隔から、光源3を識別する例が示されている。例えば、図19(a)は、識別番号「1」の光源3からのパルス光のパターンを示し、図19(b)は、識別番号「2」の光源3からのパルス光のパターンを示し、図19(c)は、識別番号「3」の光源3からのパルス光のパターンを示している。長短パルスの組み合わせで、光源3をON/OFFすることによって光源3を識別する例を示したものである。
【0073】
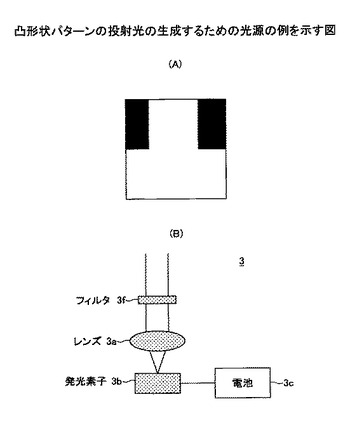
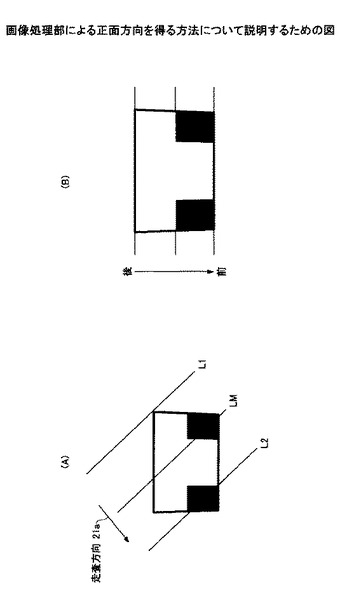
投射光形状を、前後非対称(例えば凸の上が正面)とすることで,検出対象の正面方向を取得する方法について説明する。図20は、凸形状パターンの投射光の生成するための光源の例を示す図である。図20(A)では、例えば、図20(B)に示すように、光源3に備えられたフィルタ3fによって投射光4に明暗パターンが形成された例を示している。
【0074】
図20の光源3から天井面1へ投射した画像を背景差分法で処理すると、投射光4の形状は、例えば、図21のようになる。図21は、画像処理部による正面方向を得る方法について説明するための図である。画像処理部7は、図21(A)に示す明暗パターンに対して、走査方向を所定手順に従って選択する。例えば、図21(A)に示すように走査方向21aに垂直な直線で、投射光抽出後の画像を走査したとき、最初に投射光領域を交差する直線をL1、最後に交差する直線をL2、L1とL2の中間の直線をLMとする。このとき、L1とLMで挟まれる領域に含まれる投射光領域の画素数をI1、L2とLMで挟まれる領域に含まれる投射光領域の画素数をI2とする。走査方向を回転したとき、I1とI2の差が最大となる方向が、正面方向である(図21(B))。
【0075】
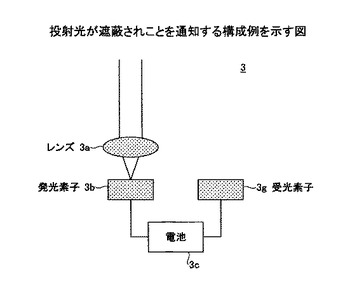
光源から投射する投射光4が遮られたことを、利用者に通知する方法について説明する。図22は、投射光が遮蔽されことを通知する構成例を示す図である。図22では、光源3に発光素子3bと受光素子3gを装着した例を示している。光源3が人や物品で遮蔽されると、投射光4の一部は遮蔽物に反射し、発光素子3bの方向へ戻る。そこで、受光素子3gで受光する反射光量が一定以上になると投射光4が遮蔽されたと判定し、アラームを出力する。また、遮蔽されたと判定したときに、発光素子3bへの通電をOFFすることで、電池の消耗を防止するように処理してもよい。
【0076】
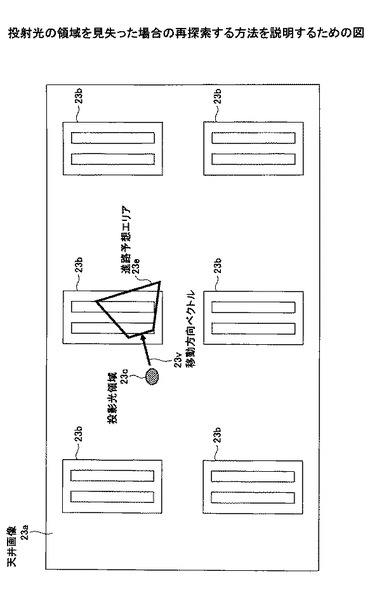
図23は、投射光の領域を見失った場合の再探索する方法を説明するための図である。天井面1での投射光4の領域が消失する直前の移動方向ベクトルを元に、進路予想エリアを設定する。移動方向ベクトルV(n)は、位置検出部から出力される現サンプリング、前サンプリングの位置ベクトルを用いて算出する。
【0077】
【数13】
【0078】
進路予想エリア23eは、例えば、台形とする。台形の短辺を、移動方向ベクトルと垂直になるように配置すると、長辺が予想出現位置となる。台形の形状は予め与えておく。台形の一部から再び投射光4が出現した際に、投射光が消失した位置と、出現した位置(RpS、RqS)とを結ぶベクトルRVを算出する。
【0079】
【数14】
【0080】
ベクトルV(n)と、RVの方向が一致するとき、出現した投射光4は、位置(pS(n)、qS(n))で消失した運搬補助車に対応すると見做す。
【0081】
【数15】
上式のように、内積が閾値Sthよりも大きければ、両ベクトルが一致していると考える。
【0082】
上述したように、本実施例では、発光方向を常に鉛直に保ち、傾斜センサで傾斜を補正し、背景差分法で微弱な光源でも位置検出を可能とする。
【0083】
本発明は、具体的に開示された実施例に限定されるものではなく、特許請求の範囲から逸脱することなく、種々の変形や変更が可能である。
【0084】
以上の説明に関し、更に以下の項を開示する。
(付記1)
移動体の位置を検出する位置検出システムであって、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、
前記投射光の画像領域の重心位置を算出する算出手段と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手段と
を有することを特徴とする位置検出システム。
(付記2)
前記光源に装着され該光源を鉛直姿勢に保持する重りと、光源方向を一定に制御する傾斜センサとによって、該光源を鉛直上向きに制御する光源姿勢制御手段を有することを特徴とする付記1記載の位置検出システム。
(付記3)
前記光源の姿勢角に基づいて該光源が鉛直姿勢になったことを検出する鉛直姿勢検出手段を有し、鉛直姿勢を検出したとき、前記光源から発光させ、又は、前記位置変換手段から前記移動体の位置を出力させることを特徴とする付記1記載の位置検出システム。
(付記4)
前記移動体の移動又は静止を判定する移動・静止判定手段を有することを特徴とする付記1乃至3のいずれか一項記載の位置検出システム。
(付記5)
前記投射光はマトリクスパターンを示し、縦横列の各要素を発光又は非発光とすることで、前記光源を識別することを特徴とする付記1乃至4のいずれか一項記載の位置検出システム。
(付記6)
前記光源は、光をパルス状に出力し、発光と非発光の時間間隔から光源を識別することを特徴とする付記1乃至4のいずれか一項記載の位置検出システム。
(付記7)
前記投射光は、前後非対称の形状を有し、前記移動体の正面方向を示すようにしたことを特徴とする付記1乃至4のいずれか一項記載の位置検出システム。
(付記8)
前記光源は、該光源に備えた受光素子の反射光量が一定以上のときに光が遮蔽されたと判断し、アラームを発行、又は、該光源からの発光を停止する投射光遮断検知手段を有することを特徴とする付記1乃至7のいずれか一項記載の位置検出システム。
(付記9)
移動体の位置を検出する位置検出方法であって、コンピュータが、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行することを特徴とする位置検出方法。
(付記10)
床面に設置した校正用光源の座標位置と、該校正用光源から前記天井面に投射された投射光の重心位置とから、該座標位置から該重心位置へと変換するための係数を算出して係数情報として記憶領域に出力する係数算出手順とを更に実行し、
前記位置変換手順は、前記記憶領域から前記係数情報を読み出して前記係数を取得し、該係数を用いて、前記重心位置を床面の前記移動体の位置へと変換することを特徴とする付記9記載の位置検出方法。
(付記11)
コンピュータを移動体の位置を検出する位置検出装置として機能させるプログラムを記憶したコンピュータ読取可能な記憶媒体であって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ読取可能な記憶媒体。
(付記12)
コンピュータを移動体の位置を検出する位置検出装置として機能させるコンピュータ実行可能なプログラムであって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ実行可能なプログラム。
【符号の説明】
【0085】
1 天井面
2 床面
3 光源
3a レンズ
3b 発光素子
3c 電池
4 投射光
4p 投射面
5 運搬補助車
6 カメラ
7 画像処理部
8 位置検出部
8c 係数情報
11 CPU
12 メモリユニット
13 表示ユニット
14 出力ユニット
15 入力ユニット
16 通信ユニット
17 記憶装置
18 ドライバ
19 記憶媒体
30、30a 光源姿勢制御部
31 発光部
32 回転軸
33 重り
34 傾斜センサ
36a 回転モータ
36b 直動モータ
36 駆動機構
37 回転軸
50 鉛直姿勢検出部
54 メモリ
82 鉛直姿勢検出部
83 無線受信部
84 メモリ
100 位置検出装置
1000 システム
T15 出力結果テーブル
【技術分野】
【0001】
本発明は、位置検出システム、方法、記憶媒体、及びプログラムに関する。
【背景技術】
【0002】
移動体の位置を検出する技術として、画像処理、無線タグ、光タグを用いる方法がある。例えば、画像処理による検出では、移動可能な自律ロボットが搭載するカメラで、天井の画像を得て現在位置を特定したり、カメラで撮影した画像から車イス領域を推定し、辞書画像と比較することによって車イスの有無を判定することなどが提案されている。また、無線タグによる検出では、車椅子使用者が無線タグを所持しておくことによりエレベータ乗り場で実際にエレベータを待つ車椅子使用者を検出できるようにすることなどが提案されている。更に、光タグの位置検出では、正三角形や円形の光を天井に投射し、カメラで三角形の頂点座標や楕円の長短軸を検出することで、移動体の位置を推定することなどが提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−257226号公報
【特許文献2】再公表2002−056251号公報
【特許文献3】特開2007−45559号公報
【特許文献4】特開2005−17203号公報
【特許文献5】特表2007−530978号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、辞書画像と比較する従来技術では、例えば、車イスの種類、車イス利用者の服装、車イスの姿勢、大きさ、照明変化、オクルージョン、背景変化などの影響で、一般的に検出精度が低く、車イスなどの運搬補助車の有無判定は、実質上、実現困難である。また、カメラで読み取った天井に投影された画像から3点以上の光点の正確な位置を検出する場合、投影図形が不明瞭である、カメラの解像度が低いなど、空間分解能が低くなると正確な位置を算出できないと言った問題がある。カメラを運搬補助車に装着させた場合、カメラサイズ、電源、検出した位置の受け渡し手段が問題となる。
【課題を解決するための手段】
【0005】
開示の技術は、移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とを有するように構成される。
【0006】
開示の技術は、コンピュータによって行なわれる位置検出方法、上記手段を機能としてコンピュータに実行させるためのプログラムを記憶したコンピュータ読み取り可能な記憶媒体、及び、そのプログラムとすることもできる。
【発明の効果】
【0007】
開示の技術では、光源の姿勢が鉛直になったときの天井への投射光を利用するため、投射光領域の輪郭が不明瞭な場合でも、運搬補助車の位置を正確に検出できる。
【図面の簡単な説明】
【0008】
【図1】設置構成例を示す図である。
【図2】本実施例に係るシステムの構成例を示す図である。
【図3】光源の構成例を示す図である。
【図4】光源姿勢制御部の構成例を示す図である。
【図5】光源姿勢制御部の他の構成例を示す図である。
【図6】位置検出装置のハードウェア構成を示すブロック図である。
【図7】画像処理部による投射光の画像領域を抽出する方法を説明するための図である。
【図8】図7での処理フローを説明するための図である。
【図9】位置検出部による運搬補助車の位置を検出する処理フローを説明するための図である。
【図10】校正処理を説明するための図である。
【図11】校正処理の全体処理フローを説明するための図である。
【図12】鉛直姿勢を検出する構成を有するシステム構成例を示す図である。
【図13】図12(A)に示す鉛直姿勢検出部の構成例を示す図である。
【図14】図12(B)に示す構成例における処理フローを説明するための図である。
【図15】図14の処理フローによる出力結果例を示す図である。
【図16】移動・静止判定部を加えたシステム構成例を示す図である。
【図17】図16のシステム構成例における処理フローを説明するための図である。
【図18】投射光のマトリクスパターンの例を示す図である。
【図19】パルス光のパターンを示す図である。
【図20】凸形状パターンの投射光の生成するための光源の例を示す図である。
【図21】画像処理部による正面方向を得る方法について説明するための図である。
【図22】投射光が遮蔽されことを通知する構成例を示す図である。
【図23】投射光の領域を見失った場合の再探索する方法を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づいて説明する。図1は、設置構成例を示す図である。図1に示すように、床面2上を移動するベビーカー、車イス、ショッピングカートなどの運搬補助車5に装着された光源3から天井面1へ投射された投射光4を、上方に向けて取り付けたカメラ6で撮影する。
【0010】
図2は、本実施例に係るシステムの構成例を示す図である。図2に示すシステム1000は、天井面1へ光を投射する光源3と、光源3の姿勢を鉛直上向きに保持するための光源姿勢制御部30と、天井面1などの投射面4pへ照射された光を撮影するためのカメラ6と、画像中から光の照射領域を抽出する画像処理部7と、照射領域の位置から床面2における運搬補助車5の位置を取得する位置検出部8とを有する。
【0011】
光源3は光源姿勢制御部30によって運搬補助車5に装着され、画像処理部7と位置検出部8とは位置検出装置100として機能するコンピュータによって実現される。
【0012】
図3は、光源の構成例を示す図である。図3において、光源3は、レンズ3aと、発光素子3bと、電池3cとを有する。発光素子3bから出た光は、レンズ3aを通過して天井面1などの投射面4pへ照射される。発光素子3bには、LEDやレーザなどを用いる。また、発光素子3bから照射される光を赤外光にすると、不可視となり、利用者が意識することなく使用することができる。
【0013】
図4は、光源姿勢制御部の構成例を示す図である。図4に示す機械式の姿勢保持機構では、光源姿勢制御部30は、直交する2つ回転軸32と重り33とによって、発光部31が常に上向きになるように保持される。よって、光源3から照射される光が常に鉛直上向きになるように、光源3の姿勢が保持される。
【0014】
図5は、光源姿勢制御部の他の構成例を示す図である。モータなどの駆動機構を用いた光源姿勢制御部の構成例を示している。図5(A)に示すように、光源姿勢制御部30aの姿勢制御機構は、傾斜センサ34と、駆動回路35と、駆動機構36とを有する。光源3に装着された傾斜センサ34によって、光源3の投射方向の鉛直軸からのずれを検出する。駆動回路35では、ずれ量を検出すると、ずれがゼロになるように駆動機構36を制御する。駆動機構36は、例えば、図5(B)及び図5(C)に示すように、回転モータ36aや直動モータ36bを用いる。こうした駆動機構36を2軸用意し、駆動方向を直交させることで、発光部が常に上向きになるように保持することができる。
【0015】
図1及び図2より、カメラ6は、天井面1への投射光が撮影可能なように上方に向けて設置する。光源3からの投射光(赤外光)と天井照明光とを区別するため、赤外光のみを透過するような光学フィルタをカメラ6に装着してもよい。
【0016】
画像処理部7は、カメラ6で取得した天井面1の画像の中から投射光の画像領域を抽出する処理部である。
【0017】
位置検出部8は、画像処理部7によって抽出された投射光の画像領域から床面2上の運搬補助車5の位置を検出する処理部である。
【0018】
画像処理部7と位置検出部8とを有する位置検出装置100は、例えば、図6に示すようなハードウェア構成を有する。図6は、位置検出装置のハードウェア構成を示すブロック図である。
【0019】
図6において、位置検出装置100は、コンピュータによって制御される端末であって、CPU(Central Processing Unit)11と、メモリユニット12と、表示ユニット13と、出力ユニット14と、入力ユニット15と、通信ユニット16と、記憶装置17と、ドライバ18とを有し、システムバスBに接続される。
【0020】
CPU11は、メモリユニット12に格納されたプログラムに従って位置検出装置100を制御する。メモリユニット12には、RAM(Random Access Memory)及びROM(Read-Only Memory)等が用いられ、CPU11にて実行されるプログラム、CPU11での処理に必要なデータ、CPU11での処理にて得られたデータ等を格納する。また、メモリユニット12の一部の領域が、CPU11での処理に利用されるワークエリアとして割り付けられている。
【0021】
表示ユニット13は、CPU11の制御のもとに必要な各種情報を表示する。出力ユニット14は、プリンタ等を有し、ユーザーからの指示に応じて各種情報を出力するために用いられる。入力ユニット15は、マウス、キーボード等を有し、ユーザーが位置検出装置100が処理を行なうための必要な各種情報を入力するために用いられる。通信ユニット16は、例えばインターネット、LAN(Local Area Network)等に接続し、外部装置との間の通信制御をするための装置である。記憶装置17には、例えば、ハードディスクユニットが用いられ、各種処理を実行するプログラム等のデータを格納する。
【0022】
位置検出装置100によって行われる処理を実現するプログラムは、例えば、CD−ROM(Compact Disc Read-Only Memory)等の記憶媒体19によって位置検出装置100に提供される。即ち、プログラムが保存された記憶媒体19がドライバ18にセットされると、ドライバ18が記憶媒体19からプログラムを読み出し、その読み出されたプログラムがシステムバスBを介して記憶装置17にインストールされる。そして、プログラムが起動されると、記憶装置17にインストールされたプログラムに従ってCPU11がその処理を開始する。尚、プログラムを格納する媒体としてCD−ROMに限定するものではなく、コンピュータが読み取り可能な媒体であればよい。本実施例に係る処理を実現するプログラムは、通信ユニット16によってネットワークを介してダウンロードし、記憶装置17にインストールするようにしても良い。また、USB対応の位置検出装置100であれば、USB接続可能な外部記憶装置からインストールするようにしても良い。更に、SDカード等のフラッシュメモリ対応の位置検出装置100であれば、そのようなメモリカードからインストールするようにしても良い。
【0023】
次に、位置検出装置100における画像処理部7と位置検出部8とによって行われる処理について、図7及び図8で説明する。図7は、画像処理部による投射光の画像領域を抽出する方法を説明するための図である。図7では、投射光の画像領域の抽出に背景差分法を用いた例を示している。背景差分法では、予め取得済みの背景画像と、カメラ6で取得した画像とを比較し、背景画像に写っていない部分を抽出する。尚、背景画像は、背景のみが映っている状態を取得した画像であり、位置検出装置100の記憶領域に格納されている。
【0024】
図8は、図7での処理フローを説明するための図である。図8において、カメラ6は天井面1の画像を取得して、位置検出装置100の画像処理部7へ転送する(ステップS11)。図7(A)は、カメラ6で取得した画像例を示している。この画像例から、画像処理部7は、運搬補助車5から天井面1へ照射された投射光4の画像領域を抽出する(ステップS12)。投射光4の画像領域の抽出には、背景差分法を用いる。背景差分法では、予め取得済みの背景画像と、カメラ6で取得した画像とを比較し、背景画像に写っていない部分を抽出する。尚、背景画像は、背景のみが映っている状態を取得した画像であり、予め記憶装置17に格納されている。
【0025】
最も単純な背景差分処理は、それぞれの画像において、同一位置の画素の輝度を比較し、輝度差が一定値以上の場合は、非背景と判定する方法である。背景画像IB、取得画像ICの横方向p、縦方向qの輝度を、
IB(p、q)、IC(p、q)
とする。このとき、輝度の差分値が閾値ITH以上であれば、非背景と判断する。
【0026】
【数1】
非背景と判定された画素のみを抽出し、新たに画像を生成すると、背景画像に写っていない物体を抽出できる。背景差分処理後の画像IDの画素(p、q)を次のように設定する。
【0027】
【数2】
上述の処理により、輝度が255となる画像領域を投射光領域と見做すことによって、例えば、図7(B)に示されるように投射領域が抽出される。
【0028】
次に、画像処理部7は、投射光4の画像領域の重心位置を求める(ステップS13)。投射光領域RDに含まれる画素数をNとしたとき、横方向の重心位置pG及び縦方向の重心位置qGは、図7(C)に示すように特定され、次式で与えられる。
【0029】
【数3】
【0030】
画像処理部7によって求められた横方向の重心位置pG及び縦方向の重心位置qGを用いて、位置検出部8は、床面2での運搬補助車5の位置へと変換する(ステップS14)。
【0031】
図9は、位置検出部による運搬補助車の位置を検出する処理フローを説明するための図である。図9において、位置検出部8は、画像処理部7から投射光の画像領域の重心位置(pG、qG)を受け取る(ステップS21)。
【0032】
図8に示すように、投射光の画面上の位置は、一般に床面2上の位置を表していない。そこで、画像中の位置を、床面2上の位置へ変換する必要がある。床面2の任意の点S(pS、qS)と、カメラ6で取得した画像中の点T(pT、qT)は、射影変換を適用することで対応付けができる。位置検出部8は、射影変換を行う変換式を用いて、床面位置(pS、qS)へ変換する(ステップS22)。射影変換については後述される。
【0033】
【数4】
【0034】
係数(a0、b0、c0)、(a1、b1、c1)、及び(a2、b2、c2)は、カメラ6を設置する際、予め図10及び図11で後述される校正処理を行って求めておき、係数情報8cとして記憶領域に格納されている。
【0035】
位置検出部8は、記憶領域から係数情報8cを読み込んで得られた係数(a0、b0、c0)、(a1、b1、c1)、(a2、b2、c2)を用いることで、画像処理部7で検出した投射光の位置(pG、qG)を、数4によって床面における運搬補助車5の位置(pS、qS)へ変換することができる。そして、位置検出部8は、算出した位置(pS、qS)を出力する(ステップS23)。
【0036】
次に、校正処理について図10及び図11で説明する。図10は、校正処理を説明するための図である。図11は、校正処理の全体処理フローを説明するための図である。
【0037】
図10を参照しつつ、図11の全体フローを説明する。図11において、カメラ6を天井面1を撮影可能に設置する(ステップS31)。
【0038】
校正用光源2a、2b、2c、及び2dを床面2に設置し、床面2における各光源の座標位置を手動計測する(ステップS32)。図10(A)に示すような床面2の校正用光源2a、2b、2c、及び2dの位置として、座標位置(ps1、qs1)、(ps2、qs2)、(ps3、qs3)、及び(ps4、qs4)が計測される。
【0039】
校正用光源2a、2b、2c、及び2dは、例えば、床面2の四隅に夫々設置される。校正用光源2a、2b、2c、及び2dから光を出力し、天井面1に投射された4箇所の校正用投射光1a、1b、1c、及び1dをカメラ6から撮影する(ステップS33)。
【0040】
カメラ6で撮影された画像は画像処理部6に転送され、画像処理部6は転送された画像から上述した背景差分法を用いて各校正用投射光1a、1b、1c、及び1dの重心位置を求める(ステップS34)。図10(B)に示すような天井面1の校正用投射光1a、1b、1c、及び1dの重心位置として、(pT1、qT1)、(pT2、qT2)、(pT3、qT3)、及び(pT4、qT4)が計算される。
【0041】
画像処理部6は、下記の変換式を解いて、
【0042】
【数5】
係数(a0、b0、c0)、(a1、b1、c1)、(a2、b2、c2)を求め(ステップS35)、係数情報8cとして位置検出部7によって読み出される記憶領域に記憶する(ステップS36)。
【0043】
[光源の揺れ制御]
次に、光源の揺れを制御し検出精度を向上させる構成について説明する。床面2に凹凸がある、或いは、運搬補助車5を急に加減速するなどの操作を行うと、光源の揺れが大きくなり、重りを装着して鉛直姿勢に保持する構成だけでは正確な位置を検出できない場合がある。そこで、光源の姿勢が鉛直姿勢になったことを検出する鉛直姿勢検出部を設けることで、検出精度を向上させる。
【0044】
図12は、鉛直姿勢を検出する構成を有するシステム構成例を示す図である。図12中、図2に示す同様の構成部分には同一の符号を付し、その説明を省略する。以下、図12(A)、図12(B)、及び図12(C)に示すシステム構成例におけるそれぞれの処理概要を説明する。
【0045】
図12(A)では、運搬補助車5は、光源3と、光源3の光源姿勢制御部30と、光源3の鉛直姿勢を検出する鉛直姿勢検出部50とを有する構成を示している。図13は、図12(A)に示す鉛直姿勢検出部の構成例を示す図である。図13(A)において、鉛直姿勢検出部50は、傾斜センサ34と、光源制御回路38とを有する。傾斜センサ34は、例えば、図13(B)に示すように、重り33の側面に装着される。
【0046】
傾斜センサ34は、光源3の姿勢角を検出する。光源制御回路38は、姿勢角に応じて、発光/非発光を制御する。例えば、姿勢角θが一定範囲内にある場合に光源を発光するように動作する場合、鉛直方向のときの姿勢角を0度とし、姿勢角θが角度の閾値α度よりも小さい場合に発光するように制御するとよい。
【0047】
【数6】
上述のような鉛直姿勢検出部50を設けることによって、光源3が鉛直姿勢のときのみ天井面1へ光が投射されるため、図9の処理フローに従うだけで、運搬補助車5の正確な位置を検出することができる。
【0048】
図12(B)では、鉛直姿勢検出部50の検出結果に応じて、位置検出部8の出力を制御するようにした構成例を示している。図12(B)において、運搬補助車5は、光源3と、光源3の光源姿勢制御部30と、光源3の姿勢角を検出する傾斜センサ34と、姿勢角を位置検出装置100へ無線で送信する無線送信部53とを有する。また、位置検出装置100は、画像処理部7と、位置検出部8と、鉛直姿勢検出部82と、無線受信部83とを有する。鉛直姿勢検出部82は、無線受信部83によって受信した光源3の姿勢角に基づいて光源3の鉛直姿勢を検出する処理部である。
【0049】
図12(B)に示す構成例では、まず、傾斜センサ34によって光源の姿勢角が検出される。姿勢角は、無線送信部53から電波信号へ変換されて、無線受信部83で受信される。無線受信部83では、電波信号を再び姿勢角へ変換し、鉛直姿勢検出部82へ入力する。鉛直姿勢検出部82では、姿勢角に応じて、位置検出部8の出力を制御する。例えば、鉛直方向のときの姿勢角を0度とし、姿勢角θが角度の閾値α度よりも小さい場合に位置検出部8から運搬補助車5の位置を出力するように制御するとよい。
【0050】
【数7】
上述のような鉛直姿勢検出部82を設けることによって、光源3が鉛直姿勢のときのみ位置が出力されるため、運搬補助車5の正確な位置を検出することができる。鉛直姿勢検出部82を加えた場合の処理フローを図14で説明する。
【0051】
図14は、図12(B)に示す構成例における処理フローを説明するための図である。図14において、カメラ6は天井面1の画像を取得して、位置検出装置100の画像処理部7へ転送する(ステップS41)。画像処理部7は、背景差分法を用いて天井面1の画像から投射光4の画像領域を抽出して(ステップS42)、投射光4の画像領域の重心位置(pG、qG)を算出する(ステップS43)。算出された重心位置(pG、qG)は、位置検出部8へと提供される。
【0052】
位置検出部8において、画像上での重心位置(pG、qG)を床面2での運搬補助車5の位置(pS、qS)へ変換し(ステップS44)、鉛直指定検出部82へと提供される。鉛直指定検出部82において、光源の姿勢角θが、
【0053】
【数8】
を満足するときの位置(pS、qS)を採用する(ステップS45)。
【0054】
上記説明では、光源3が鉛直姿勢で無い場合は、位置検出部8から位置を出力しないとした。しかし、光源3の揺れの周期によっては、検出される位置の間隔が開くため、複数の運搬補助車5が交錯する場合など、交錯後に識別できなくなるケースが考えられる。こうしたケースに対応するため、位置検出部8から全ての位置を出力し、正確な動線を求めるときのみ、鉛直姿勢検出部82で鉛直方向と判定された位置のみ採用するようにしてもよい。
【0055】
【数9】
こうした処理を適用することで、複数の運搬補助車5が交錯してもそれぞれが識別可能となり、かつ、正確な動線を検出することができる。
【0056】
尚、図12(B)では、無線送信部53、無線受信部83を経由して姿勢角を鉛直姿勢検出部82へ受け渡しているが、図12(C)のように、位置検出部8で得た位置、および、姿勢角を一旦メモリ81へ蓄え、運搬補助車5を使用していない時間帯(例えば、夜間)に、メモリ54の情報をメモリ84へと読み出して、図12(B)と同様に処理してもよい。
【0057】
図15は、図14の処理フローによる出力結果例を示す図である。図15に示す出力結果テーブルT15は、投射光4の画像領域をカメラ6が取得した時刻に対応させて、位置検出部8によって算出された床面2での位置(pS、qS)と、鉛直姿勢検出部82によって判断された採用/非採用を示すフラグである。数8が満たされれば、採用を示す「1」が設定され、数8が満たされなければ、非採用を示す「0」が示される。
【0058】
出力結果テーブルT15の例では、フラグが「1」を示す、時刻「10:32:15」における位置(5.65、2.13)と、時刻「10:32:18」における位置(5.38、3.35)とが採用されることにより、より正確な動線を求めることができる。
【0059】
[静止位置検出]
次に、商業施設などにおいて、買い物客がどの商品に注目したのかを検出するための方法について説明する。商品に注目している買い物客の位置を検出する用途においては、静止時の位置の検出精度が高ければ、移動中の検出精度は低くてもよい。つまり、ある商品に注目した、あるいは、購入するときなどには、注目した商品を知るため高い位置検出精度が必要となる。一方、移動しているときは、商品に注目していないと考えられるため、どの通路を使用したかなどの、大まかな情報が獲得できればよい。
【0060】
床面2に凹凸がある、あるいは、運搬補助車5を急に加減速するなどの操作を行うと、光源3の揺れが大きくなるため、移動中は、正確な位置を検出できない場合がある。そこで、移動・静止判定部を設けることで、運搬補助車5が移動状態であるか、静止状態であるかを識別し、静止と判定した時の位置検出精度を高める。
【0061】
図16は、移動・静止判定部を加えたシステム構成例を示す図である。図16中、図2に示す同様の構成部分には同一の符号を付し、その説明を省略する。図16において、位置検出装置100は、更に、移動・静止判定部9を有し、移動・静止判定部9では、位置検出で得た位置が一定値に収束したときに、静止状態であると見做す。
【0062】
移動・静止判定部9を加えたときの処理フローを図17で説明する。図17は、図16のシステム構成例における処理フローを説明するための図である。図17において、カメラ6は天井面1の画像を取得して、位置検出装置100の画像処理部7へ転送する(ステップS51)。画像処理部7は、背景差分法を用いて天井面1の画像から投射光4の画像領域を抽出して(ステップS52)、投射光4の画像領域の重心位置(pG、qG)を算出する(ステップS53)。算出された重心位置(pG、qG)は、位置検出部8へと提供される。
【0063】
位置検出部8において、画像上での重心位置(pG、qG)を床面2での運搬補助車5の位置(pS、qS)へ変換する(ステップS54)。変換された位置(pS、qS)は、移動・静止判定部9へ提供される。
【0064】
移動・静止判定部9は、前サンプリング時との差分が閾値以下であるか否かを判断する(ステップS55)。第nサンプリング時に得た運搬補助車5の位置を(pS(n)、qS(n))とする。第n−1サンプリング時と第nサンプリング時の位置の差分d(n)は、
【0065】
【数10】
となる。差分d(n)が、N回連続して、閾値dthよりも小さな値をとったときに、静止したと判定する。移動・静止判定部9は、差分d(n)が閾値dth以下であるか否かを判断する(ステップS56)。移動・静止判定部9は、差分d(n)が閾値dthを越える場合、サンプリング回数nをゼロに初期化して、ステップS51へと戻り、上述同様の処理を行う(ステップS55−2)。差分d(n)が閾値dth以下である場合、移動・静止判定部9は、サンプリング回数nを1加算して(ステップS56)、サンプリング回数nが所定回数N以上であるか否かを判断する(ステップS57)。サンプリング回数nが所定回数Nより少ない場合、ステップS51へ戻り、上述同様の処理を行う。
【0066】
サンプリング回数nが所定回数N以上である場合、移動・静止判定部9は、移動平均から静止時の位置を算出し(ステップS58)、ステップS51へ戻り、上述同様の処理を行う。
【0067】
ステップS55からS57での処理は、下記数式11で表される。
【0068】
【数11】
【0069】
また、静止状態において、位置検出部8で得た位置の移動平均を算出すると、微小な揺れの影響を低減することができるため、より検出精度を上げることが可能となる。ステップS55での処理は、移動平均で用いるサンプル数をM個とすると、算出される運搬補助車5の位置(pavg、qavg)は、
【0070】
【数12】
で表される。
【0071】
[投射光パターン]
光源3を識別する仕組みについて説明する。図18は、投射光のマトリクスパターンの例を示す図である。図18(A)に示すように、投射光4をマトリクスパターン18aとし、縦横列の各要素を発光/非発光とすることで光源3を識別する。例えば、図18(B)に示すように、マトリクスパターンは、光源3のレンズ3a後段に明暗パターンを持つフィルタ3fなどを挿入することで実現する。他の構成部分については図3と同様であるので同一符号を付し、その説明を省略する。
【0072】
図19は、パルス光のパターン例を示す図である。図19において、光をパルス状に出力し、発光と非発光の時間間隔から、光源3を識別する例が示されている。例えば、図19(a)は、識別番号「1」の光源3からのパルス光のパターンを示し、図19(b)は、識別番号「2」の光源3からのパルス光のパターンを示し、図19(c)は、識別番号「3」の光源3からのパルス光のパターンを示している。長短パルスの組み合わせで、光源3をON/OFFすることによって光源3を識別する例を示したものである。
【0073】
投射光形状を、前後非対称(例えば凸の上が正面)とすることで,検出対象の正面方向を取得する方法について説明する。図20は、凸形状パターンの投射光の生成するための光源の例を示す図である。図20(A)では、例えば、図20(B)に示すように、光源3に備えられたフィルタ3fによって投射光4に明暗パターンが形成された例を示している。
【0074】
図20の光源3から天井面1へ投射した画像を背景差分法で処理すると、投射光4の形状は、例えば、図21のようになる。図21は、画像処理部による正面方向を得る方法について説明するための図である。画像処理部7は、図21(A)に示す明暗パターンに対して、走査方向を所定手順に従って選択する。例えば、図21(A)に示すように走査方向21aに垂直な直線で、投射光抽出後の画像を走査したとき、最初に投射光領域を交差する直線をL1、最後に交差する直線をL2、L1とL2の中間の直線をLMとする。このとき、L1とLMで挟まれる領域に含まれる投射光領域の画素数をI1、L2とLMで挟まれる領域に含まれる投射光領域の画素数をI2とする。走査方向を回転したとき、I1とI2の差が最大となる方向が、正面方向である(図21(B))。
【0075】
光源から投射する投射光4が遮られたことを、利用者に通知する方法について説明する。図22は、投射光が遮蔽されことを通知する構成例を示す図である。図22では、光源3に発光素子3bと受光素子3gを装着した例を示している。光源3が人や物品で遮蔽されると、投射光4の一部は遮蔽物に反射し、発光素子3bの方向へ戻る。そこで、受光素子3gで受光する反射光量が一定以上になると投射光4が遮蔽されたと判定し、アラームを出力する。また、遮蔽されたと判定したときに、発光素子3bへの通電をOFFすることで、電池の消耗を防止するように処理してもよい。
【0076】
図23は、投射光の領域を見失った場合の再探索する方法を説明するための図である。天井面1での投射光4の領域が消失する直前の移動方向ベクトルを元に、進路予想エリアを設定する。移動方向ベクトルV(n)は、位置検出部から出力される現サンプリング、前サンプリングの位置ベクトルを用いて算出する。
【0077】
【数13】
【0078】
進路予想エリア23eは、例えば、台形とする。台形の短辺を、移動方向ベクトルと垂直になるように配置すると、長辺が予想出現位置となる。台形の形状は予め与えておく。台形の一部から再び投射光4が出現した際に、投射光が消失した位置と、出現した位置(RpS、RqS)とを結ぶベクトルRVを算出する。
【0079】
【数14】
【0080】
ベクトルV(n)と、RVの方向が一致するとき、出現した投射光4は、位置(pS(n)、qS(n))で消失した運搬補助車に対応すると見做す。
【0081】
【数15】
上式のように、内積が閾値Sthよりも大きければ、両ベクトルが一致していると考える。
【0082】
上述したように、本実施例では、発光方向を常に鉛直に保ち、傾斜センサで傾斜を補正し、背景差分法で微弱な光源でも位置検出を可能とする。
【0083】
本発明は、具体的に開示された実施例に限定されるものではなく、特許請求の範囲から逸脱することなく、種々の変形や変更が可能である。
【0084】
以上の説明に関し、更に以下の項を開示する。
(付記1)
移動体の位置を検出する位置検出システムであって、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、
前記投射光の画像領域の重心位置を算出する算出手段と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手段と
を有することを特徴とする位置検出システム。
(付記2)
前記光源に装着され該光源を鉛直姿勢に保持する重りと、光源方向を一定に制御する傾斜センサとによって、該光源を鉛直上向きに制御する光源姿勢制御手段を有することを特徴とする付記1記載の位置検出システム。
(付記3)
前記光源の姿勢角に基づいて該光源が鉛直姿勢になったことを検出する鉛直姿勢検出手段を有し、鉛直姿勢を検出したとき、前記光源から発光させ、又は、前記位置変換手段から前記移動体の位置を出力させることを特徴とする付記1記載の位置検出システム。
(付記4)
前記移動体の移動又は静止を判定する移動・静止判定手段を有することを特徴とする付記1乃至3のいずれか一項記載の位置検出システム。
(付記5)
前記投射光はマトリクスパターンを示し、縦横列の各要素を発光又は非発光とすることで、前記光源を識別することを特徴とする付記1乃至4のいずれか一項記載の位置検出システム。
(付記6)
前記光源は、光をパルス状に出力し、発光と非発光の時間間隔から光源を識別することを特徴とする付記1乃至4のいずれか一項記載の位置検出システム。
(付記7)
前記投射光は、前後非対称の形状を有し、前記移動体の正面方向を示すようにしたことを特徴とする付記1乃至4のいずれか一項記載の位置検出システム。
(付記8)
前記光源は、該光源に備えた受光素子の反射光量が一定以上のときに光が遮蔽されたと判断し、アラームを発行、又は、該光源からの発光を停止する投射光遮断検知手段を有することを特徴とする付記1乃至7のいずれか一項記載の位置検出システム。
(付記9)
移動体の位置を検出する位置検出方法であって、コンピュータが、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行することを特徴とする位置検出方法。
(付記10)
床面に設置した校正用光源の座標位置と、該校正用光源から前記天井面に投射された投射光の重心位置とから、該座標位置から該重心位置へと変換するための係数を算出して係数情報として記憶領域に出力する係数算出手順とを更に実行し、
前記位置変換手順は、前記記憶領域から前記係数情報を読み出して前記係数を取得し、該係数を用いて、前記重心位置を床面の前記移動体の位置へと変換することを特徴とする付記9記載の位置検出方法。
(付記11)
コンピュータを移動体の位置を検出する位置検出装置として機能させるプログラムを記憶したコンピュータ読取可能な記憶媒体であって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ読取可能な記憶媒体。
(付記12)
コンピュータを移動体の位置を検出する位置検出装置として機能させるコンピュータ実行可能なプログラムであって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ実行可能なプログラム。
【符号の説明】
【0085】
1 天井面
2 床面
3 光源
3a レンズ
3b 発光素子
3c 電池
4 投射光
4p 投射面
5 運搬補助車
6 カメラ
7 画像処理部
8 位置検出部
8c 係数情報
11 CPU
12 メモリユニット
13 表示ユニット
14 出力ユニット
15 入力ユニット
16 通信ユニット
17 記憶装置
18 ドライバ
19 記憶媒体
30、30a 光源姿勢制御部
31 発光部
32 回転軸
33 重り
34 傾斜センサ
36a 回転モータ
36b 直動モータ
36 駆動機構
37 回転軸
50 鉛直姿勢検出部
54 メモリ
82 鉛直姿勢検出部
83 無線受信部
84 メモリ
100 位置検出装置
1000 システム
T15 出力結果テーブル
【特許請求の範囲】
【請求項1】
移動体の位置を検出する位置検出システムであって、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、
前記投射光の画像領域の重心位置を算出する算出手段と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手段と
を有することを特徴とする位置検出システム。
【請求項2】
前記光源に装着され該光源を鉛直姿勢に保持する重りと、光源方向を一定に制御する傾斜センサとによって、該光源を鉛直上向きに制御する光源姿勢制御手段を有することを特徴とする請求項1記載の位置検出システム。
【請求項3】
前記光源の姿勢角に基づいて該光源が鉛直姿勢になったことを検出する鉛直姿勢検出手段を有し、鉛直姿勢を検出したとき、前記光源から発光させ、又は、前記位置変換手段から前記移動体の位置を出力させることを特徴とする請求項1記載の位置検出システム。
【請求項4】
前記移動体の移動又は静止を判定する移動・静止判定手段を有することを特徴とする請求項1乃至3のいずれか一項記載の位置検出システム。
【請求項5】
前記投射光は、前後非対称の形状を有し、前記移動体の正面方向を示すようにしたことを特徴とする請求項1乃至4のいずれか一項記載の位置検出システム。
【請求項6】
移動体の位置を検出する位置検出方法であって、コンピュータが、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行することを特徴とする位置検出方法。
【請求項7】
コンピュータを移動体の位置を検出する位置検出装置として機能させるプログラムを記憶したコンピュータ読取可能な記憶媒体であって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ読取可能な記憶媒体。
【請求項8】
コンピュータを移動体の位置を検出する位置検出装置として機能させるコンピュータ実行可能なプログラムであって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ実行可能なプログラム。
【請求項1】
移動体の位置を検出する位置検出システムであって、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、
前記投射光の画像領域の重心位置を算出する算出手段と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手段と
を有することを特徴とする位置検出システム。
【請求項2】
前記光源に装着され該光源を鉛直姿勢に保持する重りと、光源方向を一定に制御する傾斜センサとによって、該光源を鉛直上向きに制御する光源姿勢制御手段を有することを特徴とする請求項1記載の位置検出システム。
【請求項3】
前記光源の姿勢角に基づいて該光源が鉛直姿勢になったことを検出する鉛直姿勢検出手段を有し、鉛直姿勢を検出したとき、前記光源から発光させ、又は、前記位置変換手段から前記移動体の位置を出力させることを特徴とする請求項1記載の位置検出システム。
【請求項4】
前記移動体の移動又は静止を判定する移動・静止判定手段を有することを特徴とする請求項1乃至3のいずれか一項記載の位置検出システム。
【請求項5】
前記投射光は、前後非対称の形状を有し、前記移動体の正面方向を示すようにしたことを特徴とする請求項1乃至4のいずれか一項記載の位置検出システム。
【請求項6】
移動体の位置を検出する位置検出方法であって、コンピュータが、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行することを特徴とする位置検出方法。
【請求項7】
コンピュータを移動体の位置を検出する位置検出装置として機能させるプログラムを記憶したコンピュータ読取可能な記憶媒体であって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ読取可能な記憶媒体。
【請求項8】
コンピュータを移動体の位置を検出する位置検出装置として機能させるコンピュータ実行可能なプログラムであって、該コンピュータに、
天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手順と、
前記投射光の画像領域の重心位置を算出する算出手順と、
前記重心位置を床面の前記移動体の位置へと変換する位置変換手順と
を実行させることを特徴とするコンピュータ実行可能なプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図7】
【公開番号】特開2011−226932(P2011−226932A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97342(P2010−97342)
【出願日】平成22年4月20日(2010.4.20)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月20日(2010.4.20)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]