
位置検出システム及びケーブルユニット
【課題】単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供する。
【解決手段】位置検出システムは、所定の移動経路10に沿って移動可能な移動機20と、位置情報を記憶するとともに前記移動経路10に沿って並列配置された複数のICタグ34と、移動機20側に設けられ、対応する読取範囲A1に配された前記ICタグ34の位置情報を読み取る第1アンテナ26と、を備える。
【解決手段】位置検出システムは、所定の移動経路10に沿って移動可能な移動機20と、位置情報を記憶するとともに前記移動経路10に沿って並列配置された複数のICタグ34と、移動機20側に設けられ、対応する読取範囲A1に配された前記ICタグ34の位置情報を読み取る第1アンテナ26と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、位置検出システム及びケーブルユニットに係り、例えば所定の移動経路上の移動機の位置を検出するものに関する。
【背景技術】
【0002】
工場や倉庫などで、クレーンなどの移動機を所定の移動経路上で移動させる移動装置が採用されている。この種の移動装置において、移動機の位置を検出し、検出結果に基づいて移動機の動作状態を制御する位置制御が行われている。位置制御の方法として、誘導無線技術を用いて、移動経路上の移動機と地上局との間で誘導無線通信を行うことにより、移動機の位置を検出することが行われている(例えば、特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0003】
上記のように、誘導無線技術を用いて位置を検出するシステムは、複雑で大掛かりなものとなり、コストが増大する。
【0004】
この発明は、上記の事情を考慮したもので、その目的は、単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供することにある。
【課題を解決するための手段】
【0005】
この発明の一形態に係る位置検出システムは、所定の経路に沿って移動可能な移動機と、位置情報を記憶するとともに前記経路に沿って並列配置された複数の記憶媒体と、前記移動機側に設けられ、対応する読取範囲に配された前記記憶媒体の前記位置情報を読み取る読取手段と、を備えたことを特徴とする。
【0006】
この発明の他の一形態に係るケーブルユニットは、情報伝送路及び無線通信を行うアンテナとして機能する漏洩同軸ケーブルと、前記漏洩同軸ケーブルの長手方向に沿って並列して設けられ、位置情報を記憶する複数の記憶媒体と、備えたことを特徴とする。
【発明の効果】
【0007】
この発明の位置検出システム及びケーブルユニットによれば、単純な構成で位置検出が可能となり、設備費用を低減できる。
【図面の簡単な説明】
【0008】
【図1】この発明の第1実施形態に係る移動装置の構成を概略的に示す斜視図。
【図2】同実施形態に係る移動装置の構成を概略的に示す平面図。
【図3】同実施形態のケーブルユニットの構成を示す斜視図。
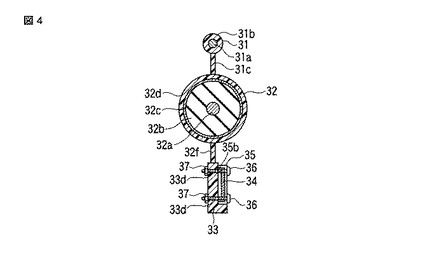
【図4】同実施形態のケーブルユニットの構成を示す断面図。
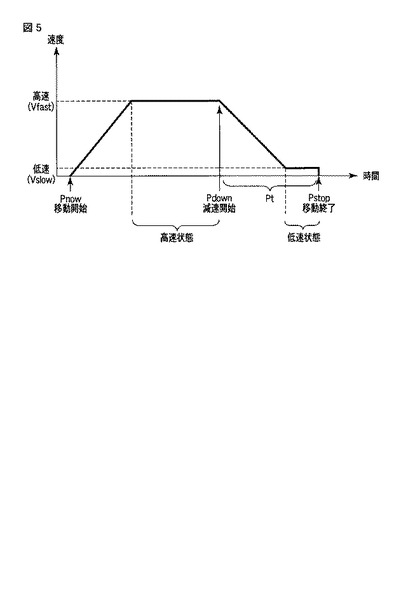
【図5】同実施形態に係る移動機の位置及び速度と時間の関係を示すグラフ。
【図6】同実施形態に係る移動装置のICタグの位置情報を示す説明図。
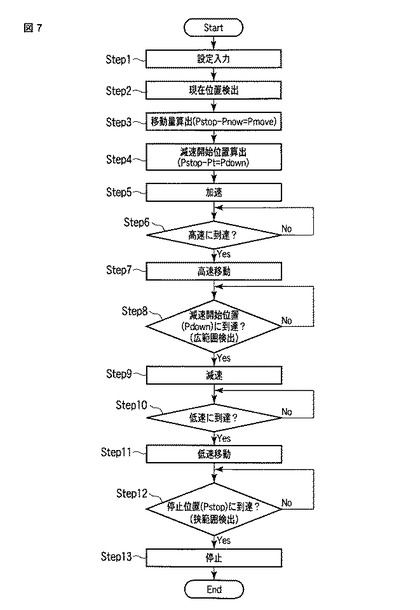
【図7】同実施形態に係る位置検出方法を示すフローチャート。
【発明を実施するための最良の形態】
【0009】
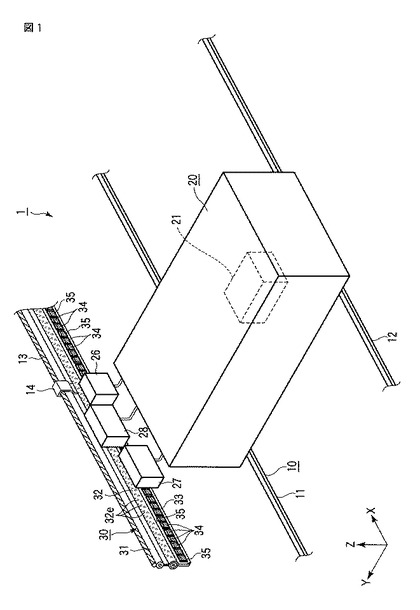
以下、この発明の一実施形態にかかる移動装置1について図面を参照して説明する。図1は、第1実施形態に係る移動装置1を概略的に示す斜視図であり、図2は移動装置1の平面図である。
【0010】
移動装置1は、例えば製鉄所などの工場に設けられるクレーン装置であり、図中X方向に延びて移動経路10を構成する一対の線路11,12と、一対の線路11,12の側部に移動経路10に沿って設置されたケーブル敷設用の支持用線13と、線路11,12上を移動可能に設けられたクレーン車等の移動機20と、支持用線13に固定され線路11,12の側部に移動経路10に沿って設けられるケーブルユニット30(ケーブルアンテナ)と、を備えている。
【0011】
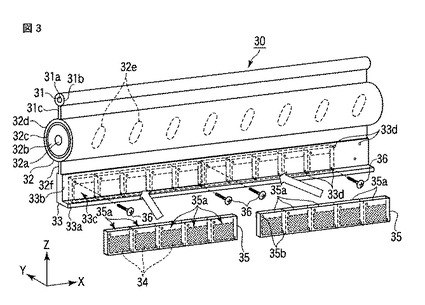
図3及び図4に示すように、ケーブルユニット30は、固定治具14を介して支持用線13に固定される固定線31と、無線通信用のアンテナとして機能する漏洩同軸ケーブル32(LCXケーブル(Leaky Coaxial Cable)と、複数の記憶媒体としてのICタグ34を有するタグハウジング33(ハウジング)とが一体に構成されている。固定線31の第1外皮体31b、LCXケーブル32の第2外皮体32d、及びタグハウジング33は、合成樹脂の成形により一体に形成される。
【0012】
固定線31は、中心部分の固定ワイヤ31aと、固定ワイヤ31aを被覆する第1外皮体31bとを有している。固定線31の外周面を成す第1外皮体31bから外側に延長形成された帯状の第1延長部31cにLCXケーブル32が一体に支持されている。
【0013】
LCXケーブル32は、中心部分に設けられた断面円形状の内部導体32a、内部導体32aの外側を被覆する円筒状の絶縁部32b、絶縁部32bの外側を被覆するとともに複数のスロット32eを有する外部導体32c、及び外部導体32cの外側を被覆する第2外皮体32dを備え、3cm程度の直径を有して構成されている。外部導体32cの複数のスロット32eは相互に作用して送受信アンテナとして機能する。すなわち、LCXケーブル32は、高周波信号を伝送する同軸ケーブルであるとともに、無線通信用のアンテナとしても機能する。LCXケーブル32の外周面を成す第2外皮体32dから外側に延長形成された帯状の第2延長部32fに、タグハウジング33が一体に形成されている。
【0014】
タグハウジング33は、タグケース35の下側を支える下壁部33aと、タグケース35の後側を支える後壁部33bと、を有する断面L字形状に形成され、タグケース35を収容する収容部33cが形成されている。この収容部33cにタグケース35が配置されている。
【0015】
固定線31の外周面を構成する第1外皮体31bと、LCXケーブル32の外周面を構成する第2外皮体32dと、タグハウジング33とは、いずれも軟質の合成樹脂から構成され、ケーブル製造過程における同一の樹脂成形工程で一体に形成されている。
【0016】
タグケース35は、細長い筐状を成し、内側に等間隔に区画された複数の収容スペース35aを有している。複数の収容スペース35aにそれぞれICタグ34を収容することにより、複数のICタグ34を等間隔で並列して保持する。ここでは1つのタグケース35の内部が5つの収容スペース35aに区画され、これらに5つの収容スペース35aにそれぞれ1つずつのICタグ34が保持されている。タグケース35及びタグハウジング33にはそれぞれ複数の取付孔35b,33dが形成されている。これらの取付孔35b,33dによって、タグケース35がタグハウジング33に、ボルト36及びナット37により着脱可能にねじ止め固定されている。
【0017】
ICタグ34は、例えば10cm以下のピッチで並列配置されている。ここでは、それぞれのICタグ34は、位置情報となるICデータとして順序データを記憶している。すなわち、複数のICタグ34は全て等間隔で配置されているので、ICタグ34の順序データがICタグ34の基準値からの距離に比例し、ICタグ34の位置に対応する。したがってこの順序データがICタグ34の位置を示す位置情報となる。
【0018】
移動経路10に沿って予め設置された支持用線13に、固定治具14を用いて固定線31を固定することにより、ケーブルユニット30全体が移動経路10に沿って設置される。
【0019】
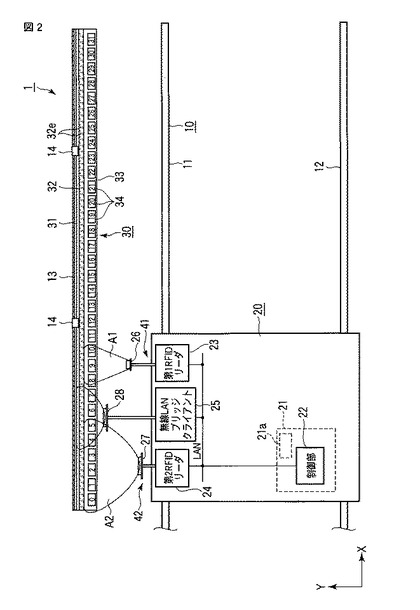
移動機20は、例えばクレーン車であり、線路11,12に係合して線路11,12上を移動経路10に沿って移動する。移動機20は、オペレータが操作する操作入力部21aを有する操縦席21と、移動機20の各種動作を制御する制御部22と、ICタグ34の情報を読み取る第1RFIDリーダ23と、ICタグ34の情報を読み取る第2RFIDリーダ24と、LCXケーブル32との間で無線通信を行う無線LANブリッジクライアント25と、を備えている。移動機20のケーブルユニット30に対向する側面には、第1読取範囲A1に配されるタグ用の第1アンテナ26(第1読取手段)、第2読取範囲A2に配されるタグ用の第2アンテナ27(第2読取手段)、及び無線LAN用の第3アンテナ28が、設けられている。例えば移動経路10の方向に沿って、先端側に第1アンテナ26、基端側に第2アンテナ27が配置され、これらに挟まれる位置に第3アンテナ28が配置されている。
【0020】
第2読取範囲A2は第1読取範囲A1よりも広く、例えば、第1読取範囲A1には3〜4枚程度のICタグ34が配置され、第2読取範囲内には20枚程度のICタグ34が配置される。第1アンテナ26及び第2アンテナ27は移動機20に設けられているため、第1読取範囲A1及び第2読取範囲A2は移動機20の移動に応じて移動する。第1アンテナ26と第2アンテナ27は、電波が互いに干渉しないように、距離を隔てて、あるいは図示しない電波遮蔽部材を介して、配置されている。
【0021】
第1アンテナ26、第2アンテナ27、及び第3アンテナ28は、それぞれ、第1RFIDリーダ23、第2RFIDリーダ24、及び無線LANブリッジクライアント25に接続されている。
【0022】
第1RFIDリーダ23と第1アンテナ26により第1読取部41が構成され、第2RFIDリーダ24と第2アンテナ27により第2読取部42が構成される。第1読取部41及び第2読取部42の読取対象となるICタグ34は共通している。これら移動機20側に設けられた第1読取部41及び第2読取部42と、LCXケーブル32側に設けられた複数のICタグ34とによって、位置検出システムが構成される。
【0023】
制御部22は、低速状態では第1読取部41で狭い第1読取範囲A1のICタグ34の情報を読み取り、高速状態では第2読取部42で広い第2読取範囲A2のICタグ34の情報を読み取るように、2種類の読取部41,42を切り替えることにより読取範囲を変更する。
【0024】
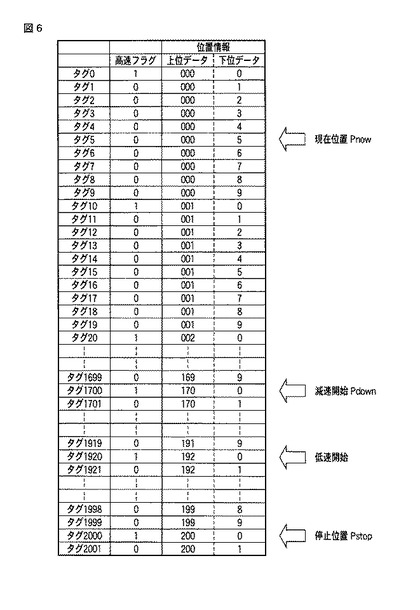
本実施形態に係るICタグ34の位置情報について図6を参照して説明する。ICタグ34に記録された位置情報としてのICデータは、例えばICタグ34の配列の順序を示す配列情報である。ICデータは、個々のICタグ34の配列情報の数値の上3桁の上位データと、配列情報の下1桁の下位データで構成されている。
【0025】
各ICタグ34のうち、下位データが0となる等間隔のICタグ34のみに高速フラグをセットし、第2読取部42の読取処理は高速フラグがセットされたICタグ34のみが対象となるようにフィルタリングの設定を行う。すなわち、第2読取部42の第2読取範囲A2にある全てのICタグ34のうち、下位データが0でないICタグ34を読取対象から除外し、下位データが0となるICタグ34のみを読取対象とする。第1読取部41は、第1読取範囲に配される3〜4枚のICタグ34を処理の対象とする。第2読取部42は第2読取範囲A2に配される20枚のICタグ34のうち、高速フラグがセットされた2あるいは3枚のICタグ34を処理の対象とする。
【0026】
以下、本実施形態に係る移動機20の位置制御の方法について、図7を参照して説明する。ここでは、一例として、現在位置Pnowの位置情報=0005、減速開始位置Pdownの位置情報=1700、停止位置Pstopの位置情報=2000と設定した場合を例示する。
【0027】
なお、移動機20の位置を示す基準位置と、第1アンテナ26及び第2アンテナ27の位置との関係によって、実際に読取範囲の中心位置と移動機20の基準位置とが異なる場合があるが、ここでは各基準位置の設定の際にその調整を行っているものとする。すなわち、第1読取部41による検出結果の位置情報と減速開始位置Pdownとが一致すれば移動機20の基準位置が減速開始位置Pdownに到達しているものとし、第2読取部42による検出結果の位置情報が停止位置Pstopと一致すれば移動機20の基準位置が停止位置Pstopに到達しているものとする。
【0028】
まず、Step1において移動機20の目的位置である停止位置Pstopの設定入力の有無を判定する。設定入力は、図示しない上位のシステムや、操作入力部21aにおいて行われる。停止位置Pstopの設定入力がされていないと判定した場合には(STEP1のNo)入力がされるまで待機する。停止位置Pstopの設定入力がなされたと判定した場合には(Step1のYes)、Step2に進む。ここでは例えば停止位置Pstop=2000に設定される。
【0029】
Step2において、移動機20の初期位置である現在位置Pnowを検出する。この現在位置Pnowの検出処理においては、移動機20が停止している状態で、第1読取部41により、読取範囲A1内に配される3〜4枚のICタグ34との送受信を行い、読み取ったICタグ34の位置情報に基づき、移動機20の位置を検出する。たとえば、読み取った3枚のICタグ34の位置情報としてのICデータが0004、0005、0006、である場合には現在位置Pnowは0005となる。
【0030】
ついで、Step3において、取得した移動機20の現在位置Pnowと設定入力された停止位置Pstopに基づき、移動機20の移動量Pmoveを算出する。例えば設定入力された停止位置Pstopから現在位置Pnowを差し引くことで移動量Pmoveを算出する。移動量Pmoveは2000−0005=1995となる。ここで、例えば移動量Pmoveの値が正の値である場合には図中X方向先端側のICデータの数値が増大する方向へ、負の値である場合にはX方向基端側のICデータの数値が減少する方向へ、移動するものとする。
【0031】
Step4において、減速開始位置Pdownをする。例えば、停止位置Pstopから一定量Ptを差し引いた手前側の位置を減速開始位置Pdownとする。一定量Pt=300とすると、減速開始位置Pdownは2000−300=1700となる。
【0032】
Step5において、移動機20を加速しながら移動させる。図5に、停止位置Pstopまでの移動機20の移動速度と時間との関係を示す。
【0033】
Step6において、移動機20の速度を検出し、移動機20の速度が所定の高速基準速度Vfastに到達するか否かを判定する。高速基準速度Vfastに到達するまで移動機20の加速を続け(Step6のNo)、高速基準速度Vfastに到達したら(Step6のYes)高速基準速度Vfastを維持しながら、高速移動を続ける(Step7)。この高速基準速度Vfastで移動している状態を高速状態とする。
【0034】
Step8において、第2読取部42において読取範囲A2での移動機20の位置検出を行い、減速開始位置Pdownに到達したか否かを判定する。このとき、高速フラグの付いているもののみ読み取るため広範囲の読取範囲A2を対象としていても処理情報量が増大することが防止できる。減速開始位置Pdownに到達するまで高速移動を続け(Step8のNo)、減速開始位置Pdownに到達したら(Step8のYes)減速しながら移動を続ける(Step9)。例えば、読み取った高速フラグのICタグ34のICデータが、1690,1700,1710である場合に、減速開始位置Pdown1700に到達したと判定する。
【0035】
Step10において、移動機20の速度を検出し、移動機20の速度が所定の低速基準速度Vslowに到達するか否かを判定する。低速基準速度Vslowに到達するまで移動機20の減速移動を続け(Step10のNo)、低速基準速度Vslowに到達したら(Step10のYes)低速基準速度Vslowを維持しながら低速移動を続ける(Step11)。この低速基準速度Vslowでの移動状態を低速状態とする。
【0036】
Step12において、第1読取部41において狭い読取範囲A1での移動機20の位置検出を行い、停止位置Pstopに到達したか否かを判定する。停止位置Pstopに到達するまで低速移動を続け(Step12のNo)、停止位置Pstopに到達したら(Step12のYes)、移動機20を停止する(Step13)。例えば読取範囲A1のICタグ34のICデータが1999,2000,2001である場合に、停止位置Pstopに到達したと判定する。
【0037】
本実施形態に係る位置検出システム及びケーブルユニット30によれば、以下の効果が得られる。すなわち、上記移動装置1では、移動経路10に沿って並列配置された複数のICタグ34のICデータを読み取るという単純なシステムによって位置検出を行うことが可能となる。このため設備費用を安く抑えることが可能となる。
【0038】
一般的に大型の移動機20では位置検出精度が10cm程度必要であるが、複数のICタグ34をこの精度を満足する間隔で配列することで、必要な精度を確保し、安価に位置検出を行うことができる。
【0039】
一般に、移動機と制御室の間で無線通信が行われているが、例えば製鉄所などの鉄骨構造の建物の中ではアクセスポイントによる無線LANでは反射等の影響で安定しないため、伝送路としての機能とアンテナとしての機能を有するLCXケーブルが用いられている。上記移動装置1では、ICタグ34をLCXケーブル32と一体に形成したことにより、設置作業を簡易化できる。また、固定線31の外周面を構成する第1外皮体31b、LCXケーブル32の外周面を構成する第2外皮体32d、及びタグハウジング33を、樹脂成形工程で一体に形成することで、容易にICタグの保持構造を構成できる。また個々のICタグ34を着脱可能としたことにより一部のICタグ34に故障などが生じても、交換が可能となる。
【0040】
一般に、大型の移動機を所望の停止位置まで移動させる場合、高速では急停止が出来ず低速では時間がかかるため、高速で停止位置の近くまで移動し、停止位置に近づいてから低速で位置の調整を行うことが行われる。このような場合、高速状態では処理時間を確保することが難しいが大まかな位置が検出できれば良い。一方で、停止直前の低速状態では処理時間を確保しやすいが目的位置を特定して高精度で検出する必要がある。上記移動装置1では、高速状態の場合と低速状態の場合とで読取範囲を切り替えることが出来るので、移動速度に応じた適当な読取範囲で読取処理を行うことができるので処理効率が良い。
【0041】
高速移動しながら広範囲の多数のICタグを全て読み込むとデータ処理に時間がかかり、またタグ同士の干渉により、読み落としが発生する場合がある。上記移動装置1では、高速フラグをセットして高速状態における処理情報量を限定したことにより、処理量の増大を防止し、処理負荷を低減することができるとともにタグ同士の干渉を防ぐことが出来る。このため、読み落としなどを防止して高い読取精度を維持することが出来る。複数の読取部41,42の対象となるICタグ34を共通させ、読取範囲を変更するだけですむため、設備を単純化できる。
【0042】
複数枚のICタグ34のICデータから位置を検出するため、いずれかのICタグ34が故障している場合であっても、その周囲のICタグ34のICデータから位置を検出することができる。例えば停止位置Pstopの位置情報が2000である場合、ICデータ2000のICタグ34が故障していても、1999,2001の2つのICデータを検出することにより、2000に到達したと判定できる。
【0043】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。たとえば、上記実施形態においては、操縦席21での制御部22において位置制御を行う場合を例示したが、これに限られるものではなく、例えば移動機20とは別に設けられた制御・監視室から無線LAN経由で制御を実施することも可能である。上記実施形態においては、移動機の動作パターンとして、加速、高速移動、減速、低速移動、停止の順で速度が変化するパターンを例示したが、これに限られるものではない。また、位置情報や速度の基準値も上記実施形態に限られるものではない。上記実施形態では2台の読取部を設けた場合について例示したが、これに限られるものではなく、1台であっても本発明を適用可能である。ICタグ34に記憶される位置情報としては、上記実施形態で例示した順序データに限られるものではなく、他の情報であっても適用可能である。その他、この発明は上記実施形態に限定されるものではなく、要旨を変えない範囲で種々変形実施可能である。
【符号の説明】
【0044】
1…移動装置、10…移動経路(経路)、11、12…線路、13…支持用線、
14…固定治具、20…移動機、22…制御部、23…第1RFIDリーダ、
24…第2RFIDリーダ、25…LANブリッジクライアント、
26…第1アンテナ(第1読取手段)、27…第2アンテナ(第2読取手段)、
28…第3アンテナ、30…ケーブルユニット、31…固定線、31b…外皮体、
31a…固定ワイヤ、31c…延長部、32…漏洩同軸ケーブル(LCXケーブル)、
32d…外皮体、32a…内部導体、32b…絶縁部、32e…スロット、
32c…外部導体、33…タグハウジング、33c…収容部、34…ICタグ(記憶媒体)、
35…タグケース、41…第1読取部、42…第2読取部。
【先行技術文献】
【特許文献】
【0045】
【特許文献1】特開平7−22986号公報
【技術分野】
【0001】
この発明は、位置検出システム及びケーブルユニットに係り、例えば所定の移動経路上の移動機の位置を検出するものに関する。
【背景技術】
【0002】
工場や倉庫などで、クレーンなどの移動機を所定の移動経路上で移動させる移動装置が採用されている。この種の移動装置において、移動機の位置を検出し、検出結果に基づいて移動機の動作状態を制御する位置制御が行われている。位置制御の方法として、誘導無線技術を用いて、移動経路上の移動機と地上局との間で誘導無線通信を行うことにより、移動機の位置を検出することが行われている(例えば、特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0003】
上記のように、誘導無線技術を用いて位置を検出するシステムは、複雑で大掛かりなものとなり、コストが増大する。
【0004】
この発明は、上記の事情を考慮したもので、その目的は、単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供することにある。
【課題を解決するための手段】
【0005】
この発明の一形態に係る位置検出システムは、所定の経路に沿って移動可能な移動機と、位置情報を記憶するとともに前記経路に沿って並列配置された複数の記憶媒体と、前記移動機側に設けられ、対応する読取範囲に配された前記記憶媒体の前記位置情報を読み取る読取手段と、を備えたことを特徴とする。
【0006】
この発明の他の一形態に係るケーブルユニットは、情報伝送路及び無線通信を行うアンテナとして機能する漏洩同軸ケーブルと、前記漏洩同軸ケーブルの長手方向に沿って並列して設けられ、位置情報を記憶する複数の記憶媒体と、備えたことを特徴とする。
【発明の効果】
【0007】
この発明の位置検出システム及びケーブルユニットによれば、単純な構成で位置検出が可能となり、設備費用を低減できる。
【図面の簡単な説明】
【0008】
【図1】この発明の第1実施形態に係る移動装置の構成を概略的に示す斜視図。
【図2】同実施形態に係る移動装置の構成を概略的に示す平面図。
【図3】同実施形態のケーブルユニットの構成を示す斜視図。
【図4】同実施形態のケーブルユニットの構成を示す断面図。
【図5】同実施形態に係る移動機の位置及び速度と時間の関係を示すグラフ。
【図6】同実施形態に係る移動装置のICタグの位置情報を示す説明図。
【図7】同実施形態に係る位置検出方法を示すフローチャート。
【発明を実施するための最良の形態】
【0009】
以下、この発明の一実施形態にかかる移動装置1について図面を参照して説明する。図1は、第1実施形態に係る移動装置1を概略的に示す斜視図であり、図2は移動装置1の平面図である。
【0010】
移動装置1は、例えば製鉄所などの工場に設けられるクレーン装置であり、図中X方向に延びて移動経路10を構成する一対の線路11,12と、一対の線路11,12の側部に移動経路10に沿って設置されたケーブル敷設用の支持用線13と、線路11,12上を移動可能に設けられたクレーン車等の移動機20と、支持用線13に固定され線路11,12の側部に移動経路10に沿って設けられるケーブルユニット30(ケーブルアンテナ)と、を備えている。
【0011】
図3及び図4に示すように、ケーブルユニット30は、固定治具14を介して支持用線13に固定される固定線31と、無線通信用のアンテナとして機能する漏洩同軸ケーブル32(LCXケーブル(Leaky Coaxial Cable)と、複数の記憶媒体としてのICタグ34を有するタグハウジング33(ハウジング)とが一体に構成されている。固定線31の第1外皮体31b、LCXケーブル32の第2外皮体32d、及びタグハウジング33は、合成樹脂の成形により一体に形成される。
【0012】
固定線31は、中心部分の固定ワイヤ31aと、固定ワイヤ31aを被覆する第1外皮体31bとを有している。固定線31の外周面を成す第1外皮体31bから外側に延長形成された帯状の第1延長部31cにLCXケーブル32が一体に支持されている。
【0013】
LCXケーブル32は、中心部分に設けられた断面円形状の内部導体32a、内部導体32aの外側を被覆する円筒状の絶縁部32b、絶縁部32bの外側を被覆するとともに複数のスロット32eを有する外部導体32c、及び外部導体32cの外側を被覆する第2外皮体32dを備え、3cm程度の直径を有して構成されている。外部導体32cの複数のスロット32eは相互に作用して送受信アンテナとして機能する。すなわち、LCXケーブル32は、高周波信号を伝送する同軸ケーブルであるとともに、無線通信用のアンテナとしても機能する。LCXケーブル32の外周面を成す第2外皮体32dから外側に延長形成された帯状の第2延長部32fに、タグハウジング33が一体に形成されている。
【0014】
タグハウジング33は、タグケース35の下側を支える下壁部33aと、タグケース35の後側を支える後壁部33bと、を有する断面L字形状に形成され、タグケース35を収容する収容部33cが形成されている。この収容部33cにタグケース35が配置されている。
【0015】
固定線31の外周面を構成する第1外皮体31bと、LCXケーブル32の外周面を構成する第2外皮体32dと、タグハウジング33とは、いずれも軟質の合成樹脂から構成され、ケーブル製造過程における同一の樹脂成形工程で一体に形成されている。
【0016】
タグケース35は、細長い筐状を成し、内側に等間隔に区画された複数の収容スペース35aを有している。複数の収容スペース35aにそれぞれICタグ34を収容することにより、複数のICタグ34を等間隔で並列して保持する。ここでは1つのタグケース35の内部が5つの収容スペース35aに区画され、これらに5つの収容スペース35aにそれぞれ1つずつのICタグ34が保持されている。タグケース35及びタグハウジング33にはそれぞれ複数の取付孔35b,33dが形成されている。これらの取付孔35b,33dによって、タグケース35がタグハウジング33に、ボルト36及びナット37により着脱可能にねじ止め固定されている。
【0017】
ICタグ34は、例えば10cm以下のピッチで並列配置されている。ここでは、それぞれのICタグ34は、位置情報となるICデータとして順序データを記憶している。すなわち、複数のICタグ34は全て等間隔で配置されているので、ICタグ34の順序データがICタグ34の基準値からの距離に比例し、ICタグ34の位置に対応する。したがってこの順序データがICタグ34の位置を示す位置情報となる。
【0018】
移動経路10に沿って予め設置された支持用線13に、固定治具14を用いて固定線31を固定することにより、ケーブルユニット30全体が移動経路10に沿って設置される。
【0019】
移動機20は、例えばクレーン車であり、線路11,12に係合して線路11,12上を移動経路10に沿って移動する。移動機20は、オペレータが操作する操作入力部21aを有する操縦席21と、移動機20の各種動作を制御する制御部22と、ICタグ34の情報を読み取る第1RFIDリーダ23と、ICタグ34の情報を読み取る第2RFIDリーダ24と、LCXケーブル32との間で無線通信を行う無線LANブリッジクライアント25と、を備えている。移動機20のケーブルユニット30に対向する側面には、第1読取範囲A1に配されるタグ用の第1アンテナ26(第1読取手段)、第2読取範囲A2に配されるタグ用の第2アンテナ27(第2読取手段)、及び無線LAN用の第3アンテナ28が、設けられている。例えば移動経路10の方向に沿って、先端側に第1アンテナ26、基端側に第2アンテナ27が配置され、これらに挟まれる位置に第3アンテナ28が配置されている。
【0020】
第2読取範囲A2は第1読取範囲A1よりも広く、例えば、第1読取範囲A1には3〜4枚程度のICタグ34が配置され、第2読取範囲内には20枚程度のICタグ34が配置される。第1アンテナ26及び第2アンテナ27は移動機20に設けられているため、第1読取範囲A1及び第2読取範囲A2は移動機20の移動に応じて移動する。第1アンテナ26と第2アンテナ27は、電波が互いに干渉しないように、距離を隔てて、あるいは図示しない電波遮蔽部材を介して、配置されている。
【0021】
第1アンテナ26、第2アンテナ27、及び第3アンテナ28は、それぞれ、第1RFIDリーダ23、第2RFIDリーダ24、及び無線LANブリッジクライアント25に接続されている。
【0022】
第1RFIDリーダ23と第1アンテナ26により第1読取部41が構成され、第2RFIDリーダ24と第2アンテナ27により第2読取部42が構成される。第1読取部41及び第2読取部42の読取対象となるICタグ34は共通している。これら移動機20側に設けられた第1読取部41及び第2読取部42と、LCXケーブル32側に設けられた複数のICタグ34とによって、位置検出システムが構成される。
【0023】
制御部22は、低速状態では第1読取部41で狭い第1読取範囲A1のICタグ34の情報を読み取り、高速状態では第2読取部42で広い第2読取範囲A2のICタグ34の情報を読み取るように、2種類の読取部41,42を切り替えることにより読取範囲を変更する。
【0024】
本実施形態に係るICタグ34の位置情報について図6を参照して説明する。ICタグ34に記録された位置情報としてのICデータは、例えばICタグ34の配列の順序を示す配列情報である。ICデータは、個々のICタグ34の配列情報の数値の上3桁の上位データと、配列情報の下1桁の下位データで構成されている。
【0025】
各ICタグ34のうち、下位データが0となる等間隔のICタグ34のみに高速フラグをセットし、第2読取部42の読取処理は高速フラグがセットされたICタグ34のみが対象となるようにフィルタリングの設定を行う。すなわち、第2読取部42の第2読取範囲A2にある全てのICタグ34のうち、下位データが0でないICタグ34を読取対象から除外し、下位データが0となるICタグ34のみを読取対象とする。第1読取部41は、第1読取範囲に配される3〜4枚のICタグ34を処理の対象とする。第2読取部42は第2読取範囲A2に配される20枚のICタグ34のうち、高速フラグがセットされた2あるいは3枚のICタグ34を処理の対象とする。
【0026】
以下、本実施形態に係る移動機20の位置制御の方法について、図7を参照して説明する。ここでは、一例として、現在位置Pnowの位置情報=0005、減速開始位置Pdownの位置情報=1700、停止位置Pstopの位置情報=2000と設定した場合を例示する。
【0027】
なお、移動機20の位置を示す基準位置と、第1アンテナ26及び第2アンテナ27の位置との関係によって、実際に読取範囲の中心位置と移動機20の基準位置とが異なる場合があるが、ここでは各基準位置の設定の際にその調整を行っているものとする。すなわち、第1読取部41による検出結果の位置情報と減速開始位置Pdownとが一致すれば移動機20の基準位置が減速開始位置Pdownに到達しているものとし、第2読取部42による検出結果の位置情報が停止位置Pstopと一致すれば移動機20の基準位置が停止位置Pstopに到達しているものとする。
【0028】
まず、Step1において移動機20の目的位置である停止位置Pstopの設定入力の有無を判定する。設定入力は、図示しない上位のシステムや、操作入力部21aにおいて行われる。停止位置Pstopの設定入力がされていないと判定した場合には(STEP1のNo)入力がされるまで待機する。停止位置Pstopの設定入力がなされたと判定した場合には(Step1のYes)、Step2に進む。ここでは例えば停止位置Pstop=2000に設定される。
【0029】
Step2において、移動機20の初期位置である現在位置Pnowを検出する。この現在位置Pnowの検出処理においては、移動機20が停止している状態で、第1読取部41により、読取範囲A1内に配される3〜4枚のICタグ34との送受信を行い、読み取ったICタグ34の位置情報に基づき、移動機20の位置を検出する。たとえば、読み取った3枚のICタグ34の位置情報としてのICデータが0004、0005、0006、である場合には現在位置Pnowは0005となる。
【0030】
ついで、Step3において、取得した移動機20の現在位置Pnowと設定入力された停止位置Pstopに基づき、移動機20の移動量Pmoveを算出する。例えば設定入力された停止位置Pstopから現在位置Pnowを差し引くことで移動量Pmoveを算出する。移動量Pmoveは2000−0005=1995となる。ここで、例えば移動量Pmoveの値が正の値である場合には図中X方向先端側のICデータの数値が増大する方向へ、負の値である場合にはX方向基端側のICデータの数値が減少する方向へ、移動するものとする。
【0031】
Step4において、減速開始位置Pdownをする。例えば、停止位置Pstopから一定量Ptを差し引いた手前側の位置を減速開始位置Pdownとする。一定量Pt=300とすると、減速開始位置Pdownは2000−300=1700となる。
【0032】
Step5において、移動機20を加速しながら移動させる。図5に、停止位置Pstopまでの移動機20の移動速度と時間との関係を示す。
【0033】
Step6において、移動機20の速度を検出し、移動機20の速度が所定の高速基準速度Vfastに到達するか否かを判定する。高速基準速度Vfastに到達するまで移動機20の加速を続け(Step6のNo)、高速基準速度Vfastに到達したら(Step6のYes)高速基準速度Vfastを維持しながら、高速移動を続ける(Step7)。この高速基準速度Vfastで移動している状態を高速状態とする。
【0034】
Step8において、第2読取部42において読取範囲A2での移動機20の位置検出を行い、減速開始位置Pdownに到達したか否かを判定する。このとき、高速フラグの付いているもののみ読み取るため広範囲の読取範囲A2を対象としていても処理情報量が増大することが防止できる。減速開始位置Pdownに到達するまで高速移動を続け(Step8のNo)、減速開始位置Pdownに到達したら(Step8のYes)減速しながら移動を続ける(Step9)。例えば、読み取った高速フラグのICタグ34のICデータが、1690,1700,1710である場合に、減速開始位置Pdown1700に到達したと判定する。
【0035】
Step10において、移動機20の速度を検出し、移動機20の速度が所定の低速基準速度Vslowに到達するか否かを判定する。低速基準速度Vslowに到達するまで移動機20の減速移動を続け(Step10のNo)、低速基準速度Vslowに到達したら(Step10のYes)低速基準速度Vslowを維持しながら低速移動を続ける(Step11)。この低速基準速度Vslowでの移動状態を低速状態とする。
【0036】
Step12において、第1読取部41において狭い読取範囲A1での移動機20の位置検出を行い、停止位置Pstopに到達したか否かを判定する。停止位置Pstopに到達するまで低速移動を続け(Step12のNo)、停止位置Pstopに到達したら(Step12のYes)、移動機20を停止する(Step13)。例えば読取範囲A1のICタグ34のICデータが1999,2000,2001である場合に、停止位置Pstopに到達したと判定する。
【0037】
本実施形態に係る位置検出システム及びケーブルユニット30によれば、以下の効果が得られる。すなわち、上記移動装置1では、移動経路10に沿って並列配置された複数のICタグ34のICデータを読み取るという単純なシステムによって位置検出を行うことが可能となる。このため設備費用を安く抑えることが可能となる。
【0038】
一般的に大型の移動機20では位置検出精度が10cm程度必要であるが、複数のICタグ34をこの精度を満足する間隔で配列することで、必要な精度を確保し、安価に位置検出を行うことができる。
【0039】
一般に、移動機と制御室の間で無線通信が行われているが、例えば製鉄所などの鉄骨構造の建物の中ではアクセスポイントによる無線LANでは反射等の影響で安定しないため、伝送路としての機能とアンテナとしての機能を有するLCXケーブルが用いられている。上記移動装置1では、ICタグ34をLCXケーブル32と一体に形成したことにより、設置作業を簡易化できる。また、固定線31の外周面を構成する第1外皮体31b、LCXケーブル32の外周面を構成する第2外皮体32d、及びタグハウジング33を、樹脂成形工程で一体に形成することで、容易にICタグの保持構造を構成できる。また個々のICタグ34を着脱可能としたことにより一部のICタグ34に故障などが生じても、交換が可能となる。
【0040】
一般に、大型の移動機を所望の停止位置まで移動させる場合、高速では急停止が出来ず低速では時間がかかるため、高速で停止位置の近くまで移動し、停止位置に近づいてから低速で位置の調整を行うことが行われる。このような場合、高速状態では処理時間を確保することが難しいが大まかな位置が検出できれば良い。一方で、停止直前の低速状態では処理時間を確保しやすいが目的位置を特定して高精度で検出する必要がある。上記移動装置1では、高速状態の場合と低速状態の場合とで読取範囲を切り替えることが出来るので、移動速度に応じた適当な読取範囲で読取処理を行うことができるので処理効率が良い。
【0041】
高速移動しながら広範囲の多数のICタグを全て読み込むとデータ処理に時間がかかり、またタグ同士の干渉により、読み落としが発生する場合がある。上記移動装置1では、高速フラグをセットして高速状態における処理情報量を限定したことにより、処理量の増大を防止し、処理負荷を低減することができるとともにタグ同士の干渉を防ぐことが出来る。このため、読み落としなどを防止して高い読取精度を維持することが出来る。複数の読取部41,42の対象となるICタグ34を共通させ、読取範囲を変更するだけですむため、設備を単純化できる。
【0042】
複数枚のICタグ34のICデータから位置を検出するため、いずれかのICタグ34が故障している場合であっても、その周囲のICタグ34のICデータから位置を検出することができる。例えば停止位置Pstopの位置情報が2000である場合、ICデータ2000のICタグ34が故障していても、1999,2001の2つのICデータを検出することにより、2000に到達したと判定できる。
【0043】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。たとえば、上記実施形態においては、操縦席21での制御部22において位置制御を行う場合を例示したが、これに限られるものではなく、例えば移動機20とは別に設けられた制御・監視室から無線LAN経由で制御を実施することも可能である。上記実施形態においては、移動機の動作パターンとして、加速、高速移動、減速、低速移動、停止の順で速度が変化するパターンを例示したが、これに限られるものではない。また、位置情報や速度の基準値も上記実施形態に限られるものではない。上記実施形態では2台の読取部を設けた場合について例示したが、これに限られるものではなく、1台であっても本発明を適用可能である。ICタグ34に記憶される位置情報としては、上記実施形態で例示した順序データに限られるものではなく、他の情報であっても適用可能である。その他、この発明は上記実施形態に限定されるものではなく、要旨を変えない範囲で種々変形実施可能である。
【符号の説明】
【0044】
1…移動装置、10…移動経路(経路)、11、12…線路、13…支持用線、
14…固定治具、20…移動機、22…制御部、23…第1RFIDリーダ、
24…第2RFIDリーダ、25…LANブリッジクライアント、
26…第1アンテナ(第1読取手段)、27…第2アンテナ(第2読取手段)、
28…第3アンテナ、30…ケーブルユニット、31…固定線、31b…外皮体、
31a…固定ワイヤ、31c…延長部、32…漏洩同軸ケーブル(LCXケーブル)、
32d…外皮体、32a…内部導体、32b…絶縁部、32e…スロット、
32c…外部導体、33…タグハウジング、33c…収容部、34…ICタグ(記憶媒体)、
35…タグケース、41…第1読取部、42…第2読取部。
【先行技術文献】
【特許文献】
【0045】
【特許文献1】特開平7−22986号公報
【特許請求の範囲】
【請求項1】
所定の経路に沿って移動可能な移動機と、
位置情報を記憶するとともに前記経路に沿って並列配置された複数の記憶媒体と、
前記移動機側に設けられ、対応する読取範囲に配された前記記憶媒体の前記位置情報を読み取る読取手段と、
を備えたことを特徴とする位置検出システム。
【請求項2】
前記複数の記憶媒体には、前記位置情報として、記憶媒体の位置に対応する配列情報が記憶され、
前記読取手段として、第1読取手段と、前記第1読取手段よりも読取範囲が広い第2読取手段とを有し、
前記移動機の移動速度に応じて、前記移動機の速度が低速状態の場合に前記第1読取手段によって前記記憶媒体の前記位置情報を読み取り、前記移動機の移動速度が高速状態の場合に前記第2読取手段によって前記記憶媒体の前記位置情報を読み取るように、読取範囲を変更することを特徴とする請求項1記載の位置検出システム。
【請求項3】
第2の読取手段による読取の際に、読取範囲内に配される複数の前記記憶媒体の一部を読取対象から外すことを特徴とする請求項1記載の位置検出システム。
【請求項4】
前記経路に沿って配され、前記移動機との間で無線通信を行うケーブルアンテナを備え、
前記ケーブルアンテナに、複数の前記記憶媒体が、前記経路に沿って並列して着脱可能に取り付けられることを特徴とする請求項1記載の位置検出システム。
【請求項5】
情報伝送路及び無線通信を行うアンテナとして機能する漏洩同軸ケーブルと、
前記漏洩同軸ケーブルの長手方向に沿って並列して設けられ、位置情報を記憶する複数の記憶媒体と、備えたことを特徴とするケーブルユニット。
【請求項6】
前記漏洩同軸ケーブルを所定の経路に沿って配される支持線に固定する固定ワイヤの外周面を成す第1外皮体と、
前記漏洩同軸ケーブルの外周面を成す第2外皮体と、
前記記憶媒体を保持する収容部を形成するハウジングとが、樹脂成形により一体に形成されたことを特徴とする請求項5記載のケーブルユニット。
【請求項1】
所定の経路に沿って移動可能な移動機と、
位置情報を記憶するとともに前記経路に沿って並列配置された複数の記憶媒体と、
前記移動機側に設けられ、対応する読取範囲に配された前記記憶媒体の前記位置情報を読み取る読取手段と、
を備えたことを特徴とする位置検出システム。
【請求項2】
前記複数の記憶媒体には、前記位置情報として、記憶媒体の位置に対応する配列情報が記憶され、
前記読取手段として、第1読取手段と、前記第1読取手段よりも読取範囲が広い第2読取手段とを有し、
前記移動機の移動速度に応じて、前記移動機の速度が低速状態の場合に前記第1読取手段によって前記記憶媒体の前記位置情報を読み取り、前記移動機の移動速度が高速状態の場合に前記第2読取手段によって前記記憶媒体の前記位置情報を読み取るように、読取範囲を変更することを特徴とする請求項1記載の位置検出システム。
【請求項3】
第2の読取手段による読取の際に、読取範囲内に配される複数の前記記憶媒体の一部を読取対象から外すことを特徴とする請求項1記載の位置検出システム。
【請求項4】
前記経路に沿って配され、前記移動機との間で無線通信を行うケーブルアンテナを備え、
前記ケーブルアンテナに、複数の前記記憶媒体が、前記経路に沿って並列して着脱可能に取り付けられることを特徴とする請求項1記載の位置検出システム。
【請求項5】
情報伝送路及び無線通信を行うアンテナとして機能する漏洩同軸ケーブルと、
前記漏洩同軸ケーブルの長手方向に沿って並列して設けられ、位置情報を記憶する複数の記憶媒体と、備えたことを特徴とするケーブルユニット。
【請求項6】
前記漏洩同軸ケーブルを所定の経路に沿って配される支持線に固定する固定ワイヤの外周面を成す第1外皮体と、
前記漏洩同軸ケーブルの外周面を成す第2外皮体と、
前記記憶媒体を保持する収容部を形成するハウジングとが、樹脂成形により一体に形成されたことを特徴とする請求項5記載のケーブルユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−6213(P2011−6213A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−152298(P2009−152298)
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
[ Back to top ]